Resumen Ejecutivo Pendulo Invertido
28
UNIVERSIDAD TECNOLÓGICA DE CHILE INACAP INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL RESUMEN EJECUTIVO PÉNDULO INVERTIDO ROTACIONAL CONTROLADO MEDIANTE LÓGICA DIFUSA.
-
Upload
gerald-dalbie-solis -
Category
Documents
-
view
376 -
download
5
description
mm
Transcript of Resumen Ejecutivo Pendulo Invertido
UNIVERSIDAD TECNOLÓGICA DE CHILE
INACAP
INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL
RESUMEN EJECUTIVO
PÉNDULO INVERTIDO ROTACIONAL
CONTROLADO MEDIANTE LÓGICA DIFUSA.
CARLOS EDUARDO CAAMAÑO
GERALD DALBIE RENE SOLÍS PEREIRA
2013

RESUMEN
Con el presente proyecto de título, presentamos la construcción de un Péndulo Invertido Rotacional, el cual es uno de los prototipos más empleados en las Universidades para realizar demostraciones de leyes de control lineales y no lineales. Lo anterior se debe a su consideración como uno de los sistemas más inestable y altamente no lineal.
El prototipo consiste en un brazo que rota en el plano horizontal por medio de un motor, y de un péndulo unido a unos de los extremos del brazo que es libre de rotar en el plano vertical.
Se presentara el diseño de un controlador de lógica difusa, con el objetivo de mantener el péndulo en su punto de equilibrio inestable (control de equilibrio), el cual también deberá soportar perturbaciones; además de la implementación de otro controlador difuso (control de levantamiento) para abordar el sub problema de llevar el péndulo de su posición de reposo a las cercanías de la posición invertida.
INTRODUCCIÓN
Los péndulos invertidos son una familia de prototipos muy interesantes y completos para la ingeniería de control, esto se debe a que son un ejemplo típico de sistema inestable y no lineal. El más estudiado y desarrollado de estos sistemas es el péndulo invertido sobre el carro, consistente en un péndulo que gira libremente en uno de sus extremos mediante una articulación situada sobre un carro, que se mueve sobre una guía rectilínea horizontal, bajo la acción de una fuerza F, que es la acción de control con la que se pretende actuar sobre la posición del péndulo.
Inicialmente en los años sesenta del siglo pasado, se podía ver este prototipo en los laboratorios de control de las Universidades más prestigiosas. La demostración consistía en situar inicialmente de forma manual el péndulo en la posición vertical invertida, para que posteriormente y realimentada su posición, el péndulo continuase en la posición invertida mediante la adecuada actuación del carro.
El inconveniente con esta versión del péndulo invertido sobre el carro, a la hora de plantear un controlador completo del sistema, reside en que el recorrido del carro está acotado, por lo que si se alcanza uno de sus extremos el sistema deja de funcionar.
Para evitar esta limitación Katsuhisa Furuta, del Instituto de Robótica de Tokio, propuso en los años setenta el péndulo rotatorio, conocido desde entonces como el péndulo de Furuta.Aquél consiste en un motor de eje vertical, al que es solidario un brazo de cuyo extremo cuelga la varilla del péndulo. Es decir, el extremo del brazo juega el mismo papel que el carro, con este prototipo se evitan los problemas del final de carrera.
Las principales aplicaciones del péndulo invertido son el mantenimiento del vuelo de un cohete, control de misiles, análisis de la biomecánica de la marcha, balance y postura humana, el caminar bípedo de robots, estabilidad en grúas así como en edificios. Una de las
1
Ingeniería en Automatización y Control Industrial
aplicaciones más notables es el control del posicionamiento de un satélite con respecto a la tierra, en este caso el satélite está en movimiento y las antenas que están en la tierra no pueden dejar que se mueva demasiado, ya que si no se saldría del rango de comunicación entre ellos.
OBJETIVOS
El área de Automatización de nuestra Universidad tiene como uno de sus objetivos el desarrollo de la investigación. El proyecto que se desarrollará, se enmarca dentro de la línea investigación de las nuevas tecnologías del control automático, específicamente en el área de la Inteligencia Artificial o Control Inteligente.
Debido que nuestra Universidad no cuenta con un Péndulo Invertido Rotacional, por su alto costo, se establece como primer objetivo de trabajo la construcción del mismo, satisfaciendo así, materialmente la carencia de él. Se cuenta con un capital de dinero reducido, por lo tanto la idea es abaratar costos y tratar de usar adecuadamente los recursos con los que se cuenta. Todo lo cual, para hacer factible que la Universidad lo replique para usos académicos.
El sistema debe caracterizarse por ser pequeño y de fácil movilidad, lo que garantiza que el proyecto pueda llegar fácilmente a los diferentes laboratorios y que su uso no sea limitado.El modelo físico debe evitar vibraciones producidas por el mismo sistema, esto con el fin de no introducir perturbaciones innecesarias al sistema.
Para controlar el sistema, se propone utilizar la lógica difusa, y así dar solución a las dos problemáticas de control existentes, cual es el levantamiento y equilibrio del péndulo. Es precisamente en este punto donde se busca innovar en dos ítems:
En primera instancia, este sistema típicamente es controlado por complejas leyes matemáticas de control y por herramientas muy típicas, como es el control PID y realimentación de estados, lo que dificulta su diseño. Es por ello que se utilizará lógica difusa para solucionar ambas problemáticas, donde sólo se necesita tener un conocimiento profundo sobre la dinámica del sistema.
En segundo lugar, se diseñará el control en el software SIMULINK, donde el diagrama en bloques creado se descargará en el microcontrolador, ello para ser ejecutado en tiempo real y buscar la optimización de la respuesta del control. Se innovará por el hecho de no existir estudios relacionados sobre este método, al ser ésta una tecnología muy reciente.
Para lograr estos objetivos se realizará, en un principio, un estudio del sistema a controlar, esto para decidir correctamente que tipo de sensores y actuadores se utilizará y dónde serán ubicados. Además, se elegirá el hardware y software para implementar el controlador.
Se debe emplear una metodología para el diseño de un controlador de lógica difusa que controlará el sistema, todo lo cual es necesario para que puedan ser implementados por los alumnos que requieran estudiar de manera práctica dicho control. Para satisfacer lo anterior, se diseñarán guías didácticas de la lógica de funcionamiento y su desarrollo paso a paso, en el software correspondiente.
2
Ingeniería en Automatización y Control Industrial
Finalmente la conclusión de este proyecto nos permitirá disponer de una herramienta más, para verificar la teoría del Control Inteligente de modo que se incremente el número de alumnos que puedan realizar experimentos y con ello aportar al desarrollo de nuevas tecnologías en nuestro país.
3. DESARROLLO
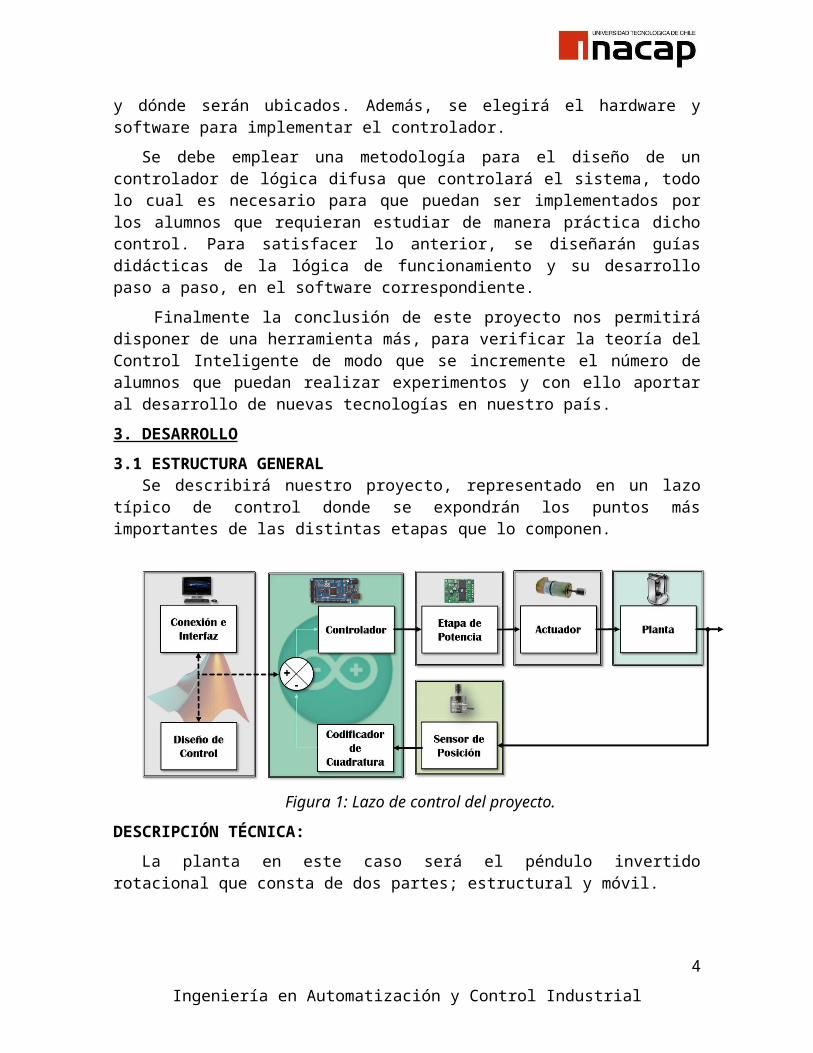
3.1 ESTRUCTURA GENERALSe describirá nuestro proyecto, representado en un lazo típico de control donde se
expondrán los puntos más importantes de las distintas etapas que lo componen.
Figura 1: Lazo de control del proyecto.
DESCRIPCIÓN TÉCNICA:
La planta en este caso será el péndulo invertido rotacional que consta de dos partes; estructural y móvil.
La etapa de censado, se encarga de medir las variables de nuestro sistema, en este caso la variable involucrada es la posición angular del brazo y péndulo. Para medir esta variable se ocuparan dos sensores de posición, específicamente, dos encoder’s ópticos incrementales, uno unido al eje del motor D.C que se encarga de girar el brazo y el otro, en el eje que une al péndulo con el brazo. Este tipo de sensores entrega la posición en base a pulsos eléctrico, por dos canales (A y B), por lo que deben ser codificados.
El codificador de cuadratura, estará a cargo de la placa adquisidora de datos, en este caso la tarjeta de desarrollo ARDUINO MEGA 2560, donde se ocuparán sus interrupciones externas para el conteo de pulsos. Cabe destacar, que el programa de codificación de cuadratura será programado en una función S de SIMULINK, en formato C, este bloque será descargado en el microcontrolador, todo lo cual para implementar nuestro controlador en tiempo real.
La etapa de control será diseñada en el computador a través de SIMULINK donde se ocuparán bloques para el cálculo, conversión, recepción y envió de datos, además del Toolbox Fuzzy Logic para la programación del control.
3
Ingeniería en Automatización y Control Industrial
Se trabajará con la librería de Arduino, proporcionada por SIMULINK, para descargar el modelo diseñado, en el microcontrolador.
La etapa de potencia, consistirá en un controlador dual de motor (POLOLU), para el sentido de giro y control de velocidad mediante PWM, del actuador; en este caso un motor de corriente continua, para que mueva el brazo con un torque y velocidad adecuada.
3.2 PLANTA:
La parte mecánica del péndulo invertido rotacional se divide en dos partes:
La parte estructural, que se encarga de darle firmeza y rigidez al sistema mecánico.La Parte móvil, que consta del mecanismo en sí (brazo y péndulo).
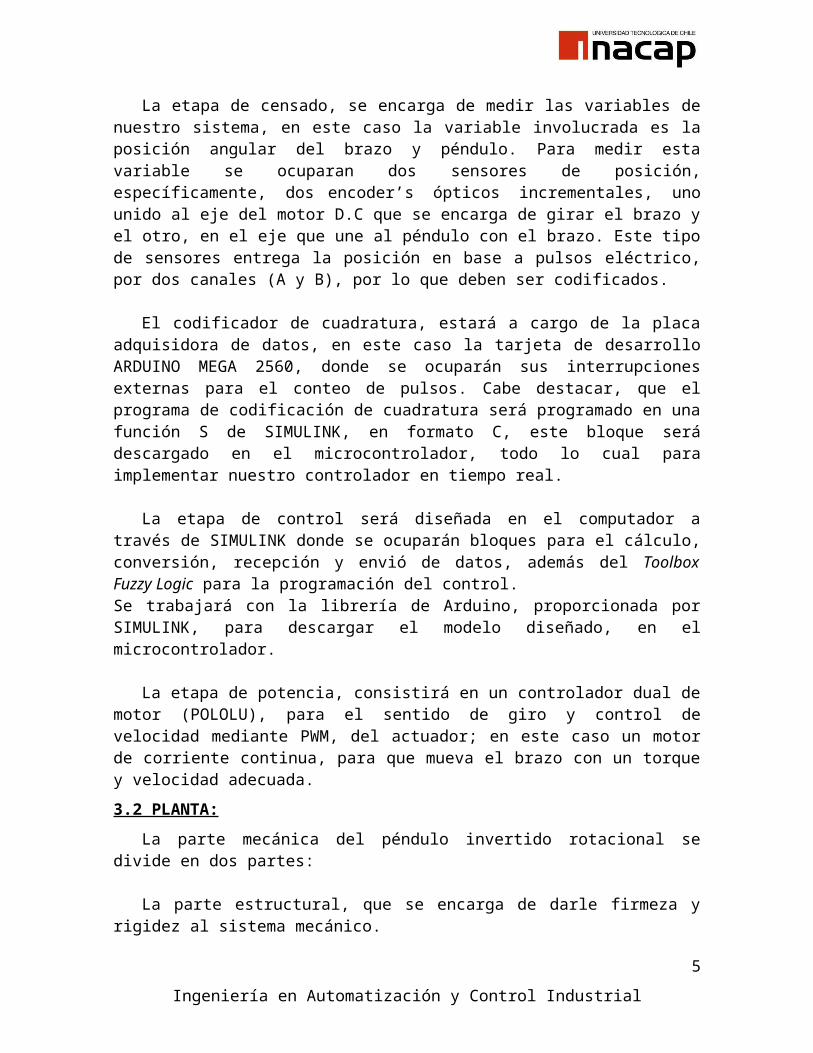
La estructura diseñada se muestra en la figura (2); el material seleccionado para la construcción es lámina de acero inoxidable, para garantizar estabilidad y rigidez, de esta forma se busca no involucrar otra perturbación sobre el sistema.
La base de acero circular garantiza que el mecanismo no se desplome para ningún lado y mantenga equilibrio. Se utilizó un material como el acero, gracias a sus propiedades de peso, las cuales permiten fijar el sistema a la superficie donde se ubique.
Figura 2: Estructura de acero inoxidable.
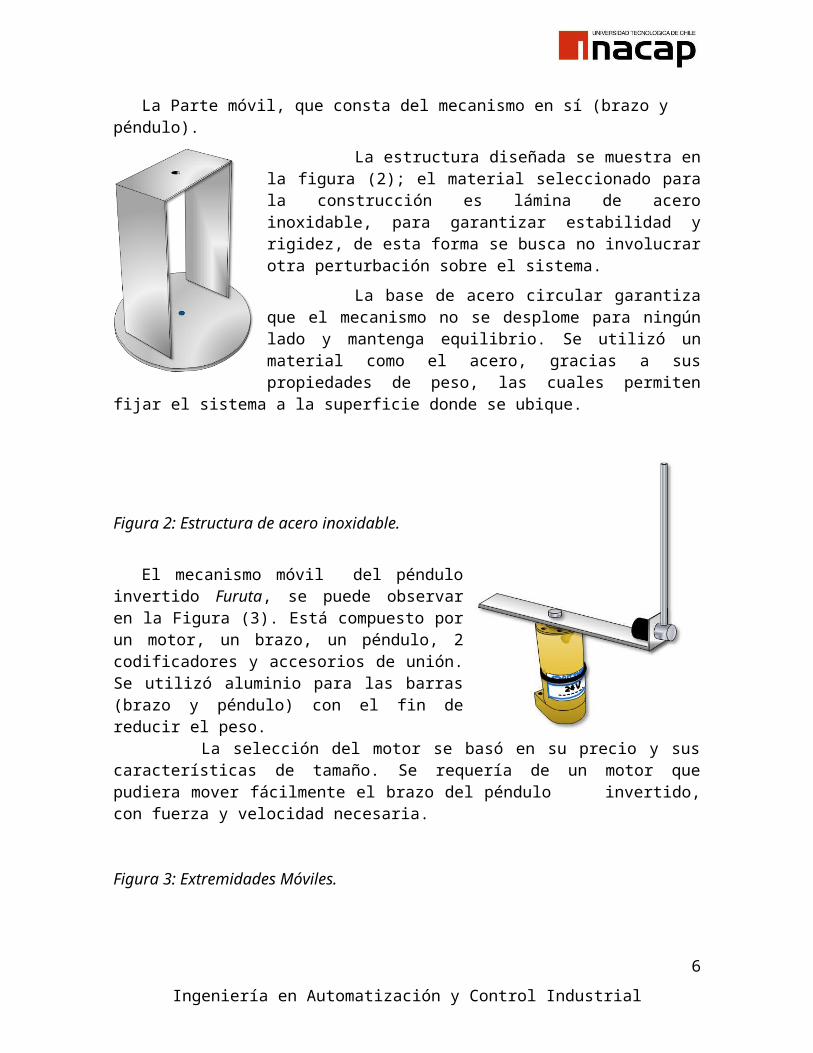
El mecanismo móvil del péndulo invertido Furuta, se puede observar en la Figura (3). Está compuesto por un motor, un brazo, un péndulo, 2 codificadores y accesorios de unión. Se utilizó aluminio para las barras (brazo y péndulo) con el fin de reducir el peso. La selección del motor se basó en su precio y sus características de tamaño. Se requería de un motor que pudiera mover fácilmente el brazo del péndulo invertido, con fuerza y velocidad necesaria.
Figura 3: Extremidades Móviles.
4
Ingeniería en Automatización y Control Industrial
Estructura Valor unidades
Péndulo 25 cm
Brazo 30 cm
Base 30 ∅ cm
Columnas 36x12 cm
Soporte Motor 22x12 cm
3.3 ETAPA DE SENSADO
SENSOR DE POSICIÓN:
Para obtener un control óptimo, debemos medir las variables más importantes de nuestro sistema, en este caso, la posición del péndulo y del motor, para ello se utilizará un encoder óptico incremental, de 1024 PPR (pulsos por revolución), para ambas extremidades. Se utilizó este tipo de sensor de posición angular, ya que el rango de medición es ilimitado y con bajo coeficiente de rose.
El encoder incremental consta de dos diodos emisores de luz cada uno enfrentado con un fotodiodo, entre los cuales se ubica un disco con n ranuras que gira solidaria a un eje.
Figura 4: Encoder Óptico Incremental.
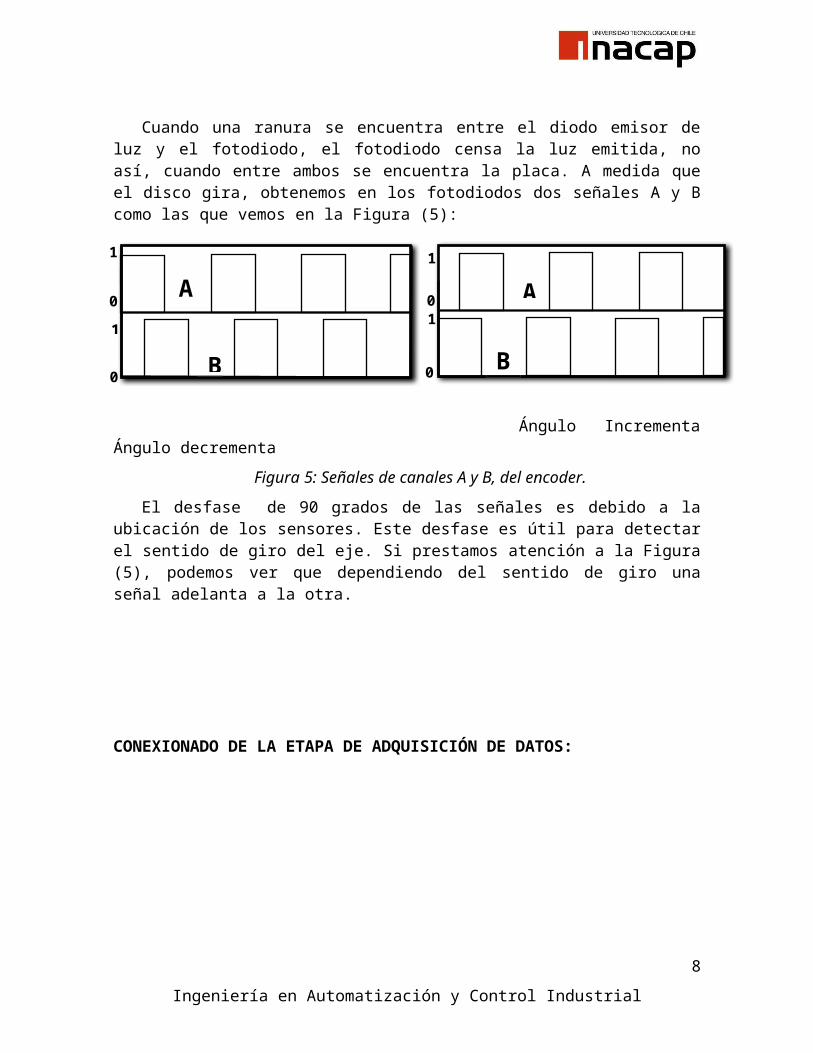
Cuando una ranura se encuentra entre el diodo emisor de luz y el fotodiodo, el fotodiodo censa la luz emitida, no así, cuando entre ambos se encuentra la placa. A medida que el disco gira, obtenemos en los fotodiodos dos señales A y B como las que vemos en la Figura (5):
Ángulo Incrementa Ángulo decrementa
Figura 5: Señales de canales A y B, del encoder.
El desfase de 90 grados de las señales es debido a la ubicación de los sensores. Este desfase es útil para detectar el sentido de giro del eje. Si prestamos atención a la Figura (5), podemos ver que dependiendo del sentido de giro una señal adelanta a la otra.
5
Ingeniería en Automatización y Control Industrial
0
0
1
A0
0
1
1
1
A
B B
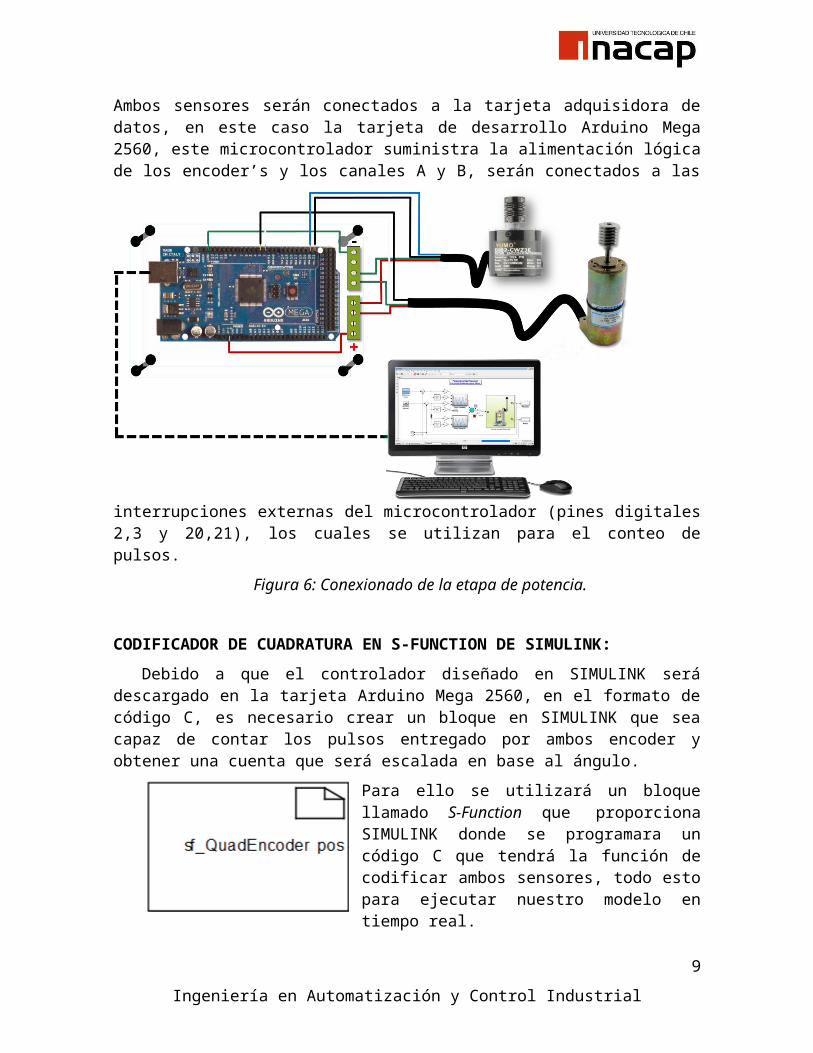
CONEXIONADO DE LA ETAPA DE ADQUISICIÓN DE DATOS:
Ambos sensores serán conectados a la tarjeta adquisidora de datos, en este caso la tarjeta de desarrollo Arduino Mega 2560, este microcontrolador suministra la alimentación lógica de los encoder’s y los canales A y B, serán conectados a las interrupciones externas del microcontrolador (pines digitales 2,3 y 20,21), los cuales se utilizan para el conteo de
pulsos.
Figura 6: Conexionado de la etapa de potencia.
CODIFICADOR DE CUADRATURA EN S-FUNCTION DE SIMULINK:
Debido a que el controlador diseñado en SIMULINK será descargado en la tarjeta Arduino Mega 2560, en el formato de código C, es necesario crear un bloque en SIMULINK que sea capaz de contar los pulsos entregado por ambos encoder y obtener una cuenta que será escalada en base al ángulo.
Para ello se utilizará un bloque llamado S-Function que proporciona SIMULINK donde se programara
un código C que tendrá la función de codificar ambos sensores, todo esto para ejecutar nuestro modelo en tiempo real.
Figura 7: Bloque S-Function de Simulink.
6
Ingeniería en Automatización y Control Industrial
3.4 ETAPA DE POTENCIA
ACTUADOR:
El actuador es un Motor DC con encoder de 1024 PPR (para medir la posición angular de su eje), del fabricante PITTMAN de la serie 9137.
Descripción Valor Unidades
Volt. Alim. 24,00 Volt
I. Max. 4,00 Amperes
Inductancia 1,97 mH
Resistencia 1,85 Ω
K torque 0,0424 Nm/A
Tabla 2: Parámetros de Motor Pittman 9137.
CONEXIONADO DE ETAPA DE POTENCIA:
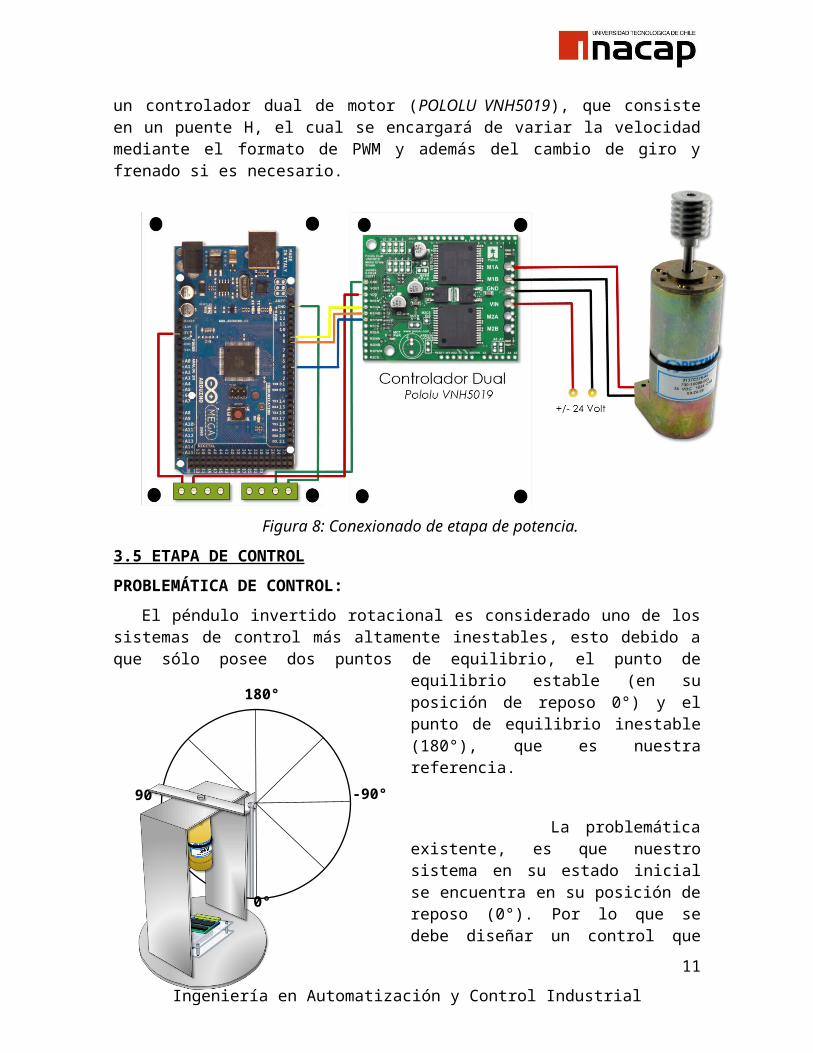
Debido a que el microcontrolador Arduino Mega 2560 no nos suministra la suficiente potencia en sus salidas digitales (PWM), se debe amplificar esta señal a 24 Volt y a una corriente de hasta 3 Amperes, para que nuestro actuador brinde la velocidad y torque adecuado. Para ello se ocupará un controlador dual de motor (POLOLU VNH5019), que consiste en un puente H, el cual se encargará de variar la velocidad mediante el formato de PWM y además del cambio de giro y frenado si es necesario.
7
Ingeniería en Automatización y Control Industrial
Figura 8: Conexionado de etapa de potencia.
3.5 ETAPA DE CONTROL
PROBLEMÁTICA DE CONTROL:
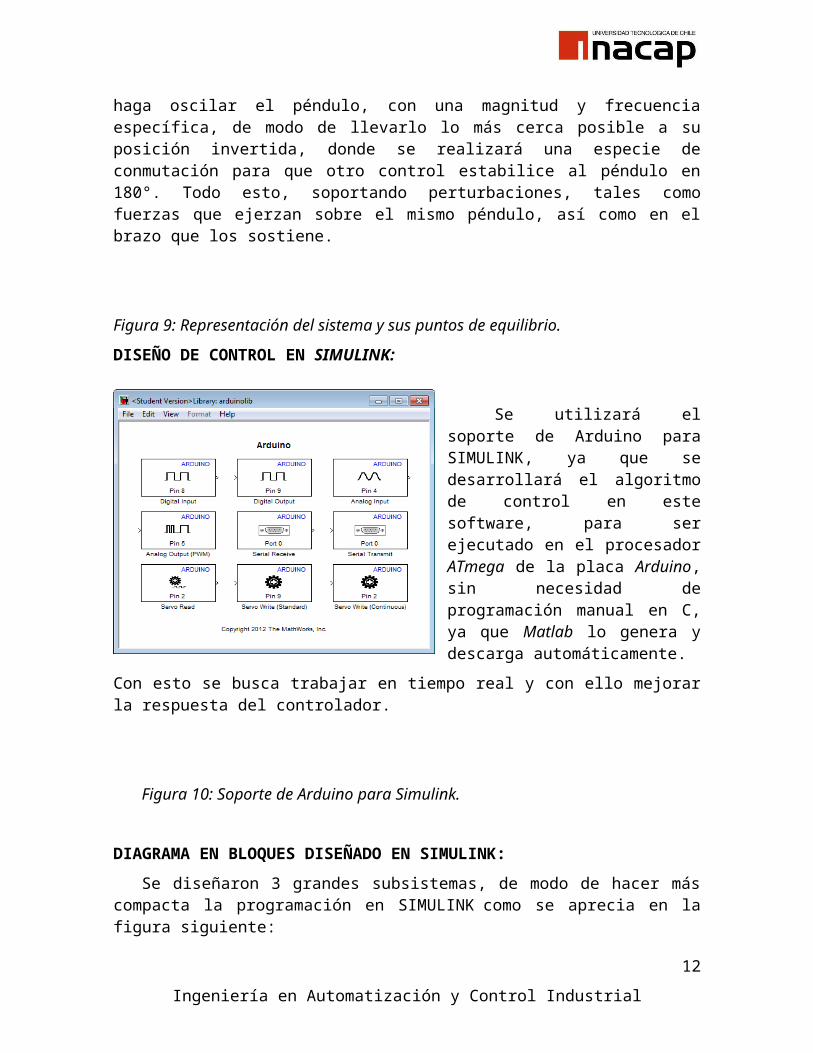
El péndulo invertido rotacional es considerado uno de los sistemas de control más altamente inestables, esto debido a que sólo posee dos puntos de equilibrio, el punto de equilibrio estable (en su posición de reposo 0°) y el punto de equilibrio inestable (180°), que es nuestra referencia.
La problemática existente, es que nuestro sistema en su estado inicial se encuentra en su posición de reposo (0°). Por lo que se debe diseñar un control que haga oscilar el péndulo, con una magnitud y frecuencia específica, de modo de llevarlo lo más cerca posible a su posición invertida, donde se realizará una especie de conmutación para que otro control estabilice al péndulo en 180°. Todo esto, soportando perturbaciones, tales como fuerzas que ejerzan sobre el mismo péndulo, así como en el brazo que los sostiene.
Figura 9: Representación del sistema y sus puntos de equilibrio.
DISEÑO DE CONTROL EN SIMULINK:
8
Ingeniería en Automatización y Control Industrial
0°
180°
-90°90°
Se utilizará el soporte de Arduino para SIMULINK, ya que se desarrollará el algoritmo de control en este software, para ser ejecutado en el procesador ATmega de la placa Arduino, sin necesidad de programación manual en C, ya que Matlab lo genera y descarga automáticamente.
Con esto se busca trabajar en tiempo real y con ello mejorar la respuesta del controlador.
Figura 10: Soporte de Arduino para Simulink.
DIAGRAMA EN BLOQUES DISEÑADO EN SIMULINK:
Se diseñaron 3 grandes subsistemas, de modo de hacer más compacta la programación en SIMULINK como se aprecia en la figura siguiente:
Figura 11: Diagrama de bloques diseñado en Simulink.
9
Ingeniería en Automatización y Control Industrial
1.- Subsistema Péndulo Invertido Rotacional: se programarán los bloques S-Function para la decodificación de los sensores, se convertirán las cuentas a grados y se escalarán los grados obtenidos.
2.- Subsistema Fuzzy Equilibrio: se diseñará el controlador para equilibrar el péndulo y se agregarán bloques de saturación para el correcto funcionamiento del control difuso.
3.- Subsistema Fuzzy Swing Up: se diseñará el controlador para generar el levantamiento del péndulo a su posición invertida, además se agregarán bloques de saturación para el correcto funcionamiento de las entradas del sistema difuso.
Se realimentará el sistema para comparar la posición angular actual, con su respectiva referencia y con ello obtener el error existente. Una vez obtenido el error de ambas extremidades, se calculará la velocidad o la tasa de cambio del error, mediante un bloque de derivada discreta con un tiempo de muestreo de 0.01 segundos.
La idea de estos cálculos, es obtener el error de posición y la derivada del error de ambas extremidades, ya que estas serán las entradas del sistema difuso.
CONTROL DIFUSO DE EQUILIBRIO
REGIÓN DE CONTROL:
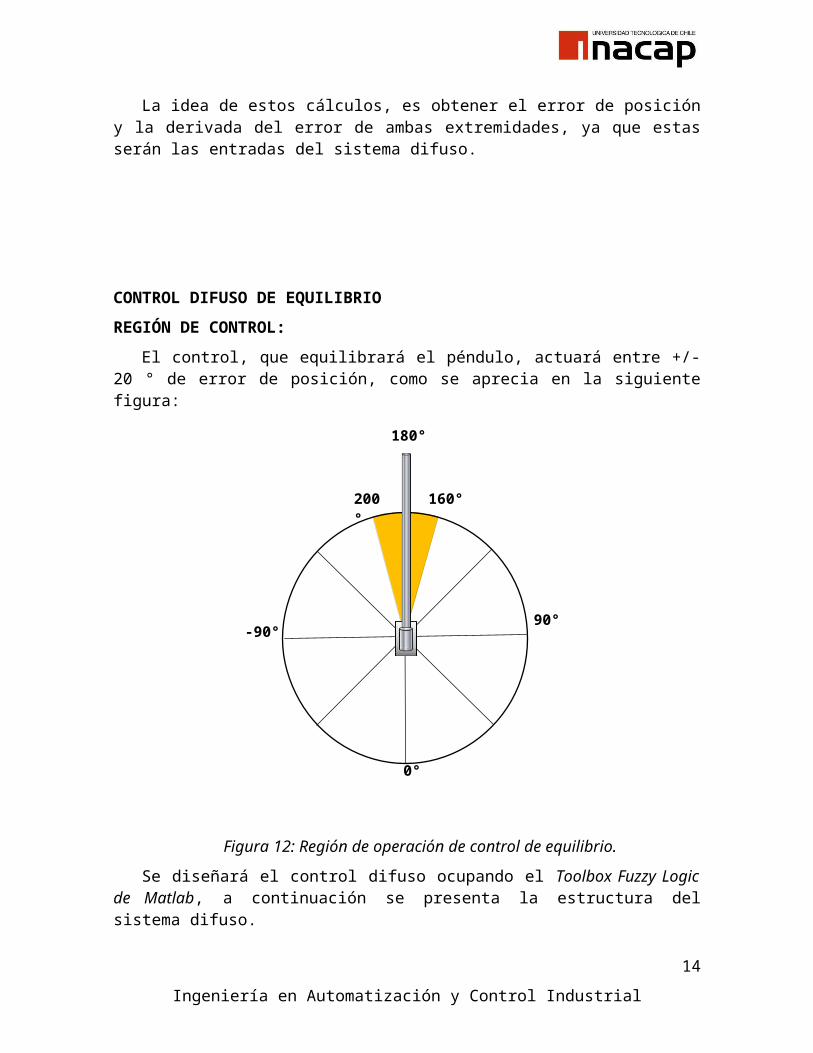
El control, que equilibrará el péndulo, actuará entre +/- 20 ° de error de posición, como se aprecia en la siguiente figura:
10
Ingeniería en Automatización y Control Industrial
200° 160°
0°
180°
90°-90°
Figura 12: Región de operación de control de equilibrio.
Se diseñará el control difuso ocupando el Toolbox Fuzzy Logic de Matlab, a continuación se presenta la estructura del sistema difuso.
ENTRADAS Y SALIDAS DEL SISTEMA DIFUSO DE EQUILIBRIO:
Nuestro sistema difuso tendrá dos variables de entrada, el error de posición del péndulo y la derivada del error y una salida que será la velocidad aplicada por el motor.
Figura 13: Entradas y salidas del sistema difuso de equilibrio.
FUNCIONES DE MEMBRECIA DEL SISTEMA DIFUSO DE EQUILIBRIO:
Se utilizarán funciones de membrecía triangulares para las tres variables:
Figura 14: Funciones de membrecía de entradas y salidas, del controlador de equilibrio.
Variable de entrada Error de Posición (e1): Tendrá cinco funciones de membrecía, del tipo triangular dispuesta en el rango de
11
Ingeniería en Automatización y Control Industrial
+/- 20 °.
Variable de entrada derivada del Error (e1): Tendrá cinco funciones de membrecía del tipo triangular, dispuestas en el rango +/- 10 °/seg.
Variable de salida Velocidad: Tendrá nueve funciones de membrecía del tipo triangular, dispuestas en el rango de +/- 1 (%), que representan el porcentaje del PWM que varía la velocidad del motor.
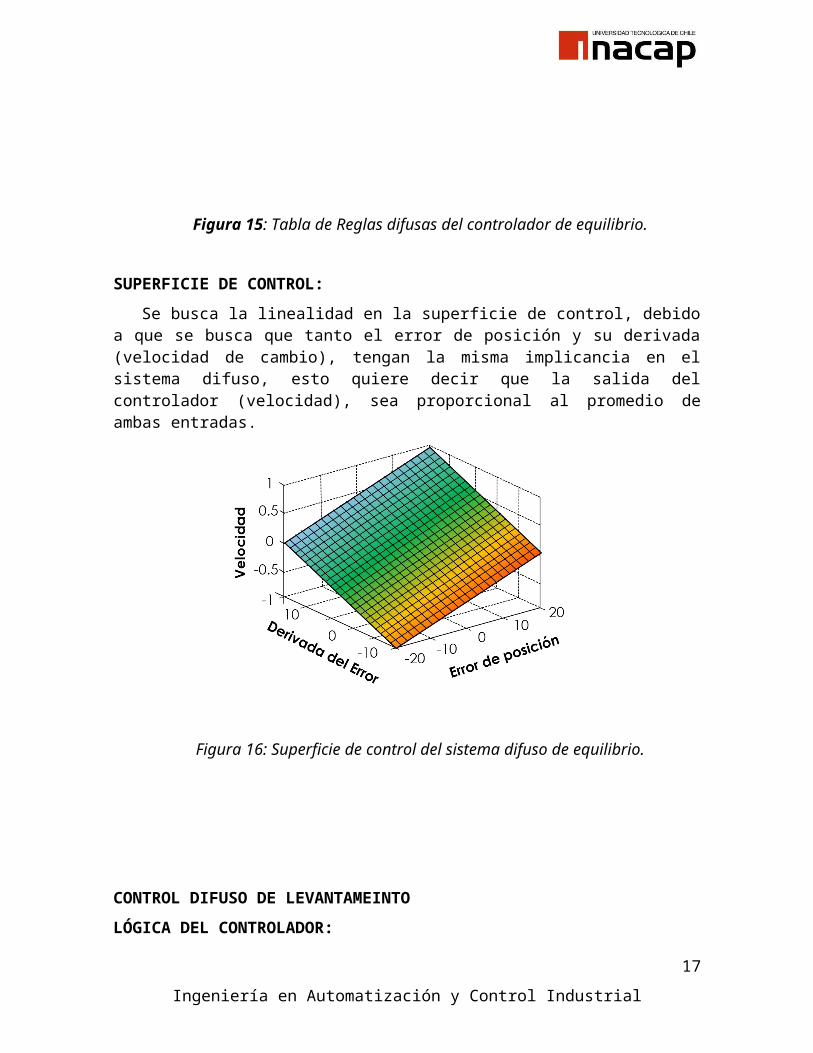
REGLAS LINGUISTICAS:
Se diseñaron 25 reglas de modo que nuestra superficie de control sea lo más lineal posible:
Figura 15: Tabla de Reglas difusas del controlador de equilibrio.
SUPERFICIE DE CONTROL:
12
Ingeniería en Automatización y Control Industrial
Se busca la linealidad en la superficie de control, debido a que se busca que tanto el error de posición y su derivada (velocidad de cambio), tengan la misma implicancia en el sistema difuso, esto quiere decir que la salida del controlador (velocidad), sea proporcional al promedio de ambas entradas.
Figura 16: Superficie de control del sistema difuso de equilibrio.
CONTROL DIFUSO DE LEVANTAMEINTO
LÓGICA DEL CONTROLADOR:
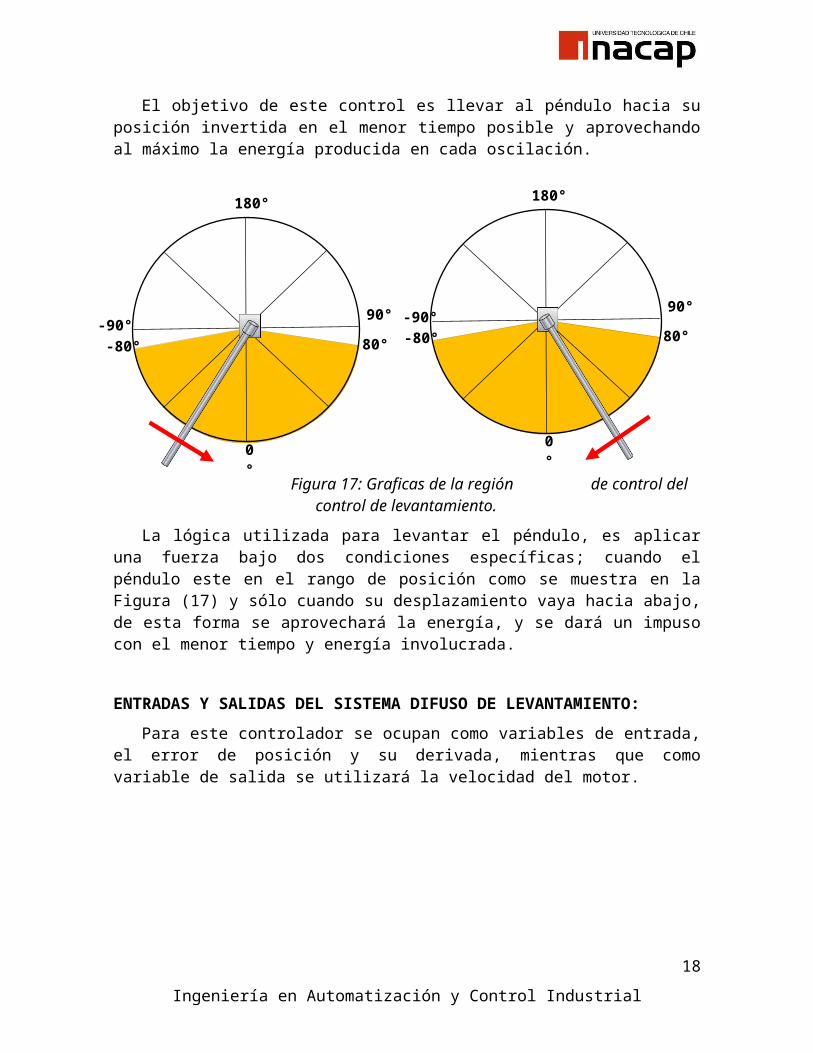
El objetivo de este control es llevar al péndulo hacia su posición invertida en el menor tiempo posible y aprovechando al máximo la energía producida en cada oscilación.
13
Ingeniería en Automatización y Control Industrial
-80° 80°
0°
180°
90°-90°
-80° 80°
0°
180°
90°-90°
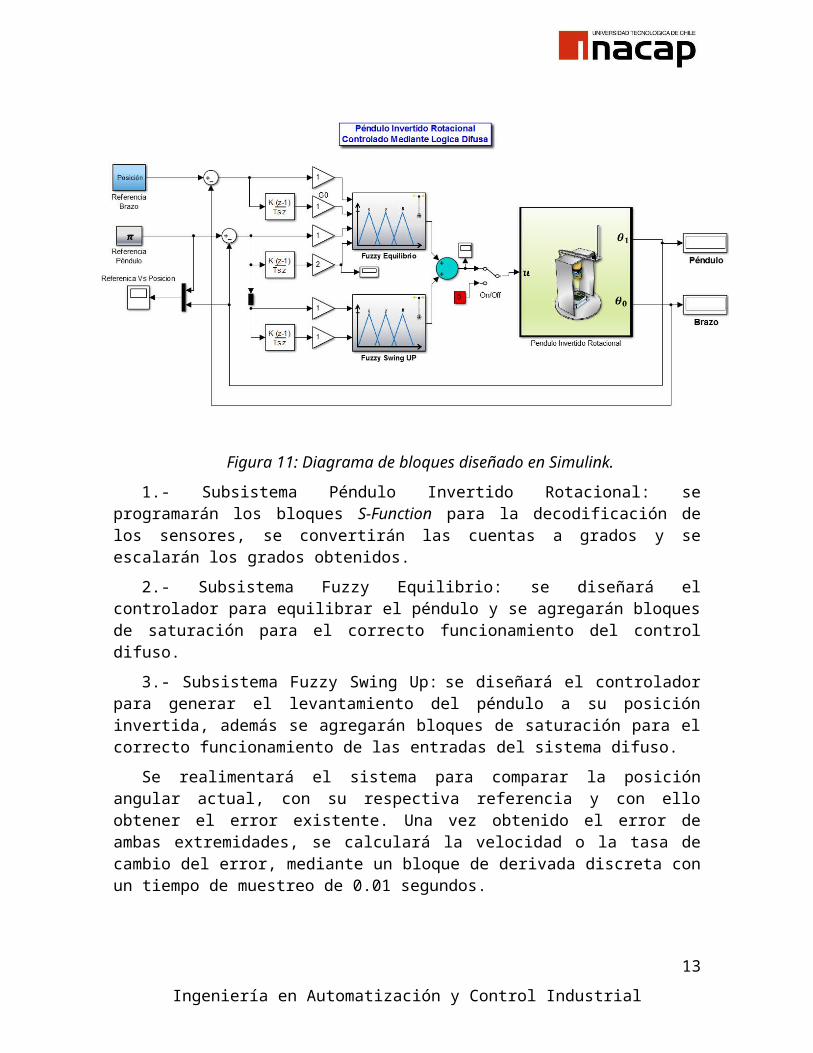
Figura 17: Graficas de la región de control del control de levantamiento.
La lógica utilizada para levantar el péndulo, es aplicar una fuerza bajo dos condiciones específicas; cuando el péndulo este en el rango de posición como se muestra en la Figura (17) y sólo cuando su desplazamiento vaya hacia abajo, de esta forma se aprovechará la energía, y se dará un impuso con el menor tiempo y energía involucrada.
ENTRADAS Y SALIDAS DEL SISTEMA DIFUSO DE LEVANTAMIENTO:
Para este controlador se ocupan como variables de entrada, el error de posición y su derivada, mientras que como variable de salida se utilizará la velocidad del motor.
Figura 18: Entradas y salidas del sistema difuso de levantamiento.
FUNCIONES DE MEMBRECÍA DEL SISTEMA DIFUSO DE LEVANTAMIENTO:
Se utilizan funciones de membrecía triangulares, trapezoidales y singleton, en el sistema difuso.
Figura 19: Funciones de membrecía del sistema difuso de levantamiento.
Variable de entrada Error de Posición (e1): Tendrá cinco funciones de membrecía, del tipo triangular y trapezoidal dispuesta en el rango entre 30° y 330°.
14
Ingeniería en Automatización y Control Industrial
Variable de entrada derivada del Error (e1): Tendrá tres funciones de membrecía del tipo triangular, dispuestas en el rango +/- 10 °/seg.
Variable de salida Velocidad: Tendrá tres funciones singleton, es decir serán valores constantes de salida que tomarán los siguientes valores: -1 para velocidad Negativa, 0 para velocidad nula y 1 para velocidad Positiva, que representan el porcentaje de ciclo del PWM.
REGLAS LINGUISTICAS:
Se crearon 15 reglas para solucionar el problema del levantamiento, como se aprecian en la siguiente tabla:
Figura 20: Tabla de reglas lingüísticas del sistema difuso de levantamiento.
4 ANÁLISIS DE COSTOS
COSTOS ESPECÍFICOS:
Se muestra el detalle de los materiales, software y horas hombre, involucradas en el proyecto en la siguiente tabla:
15
Ingeniería en Automatización y Control Industrial
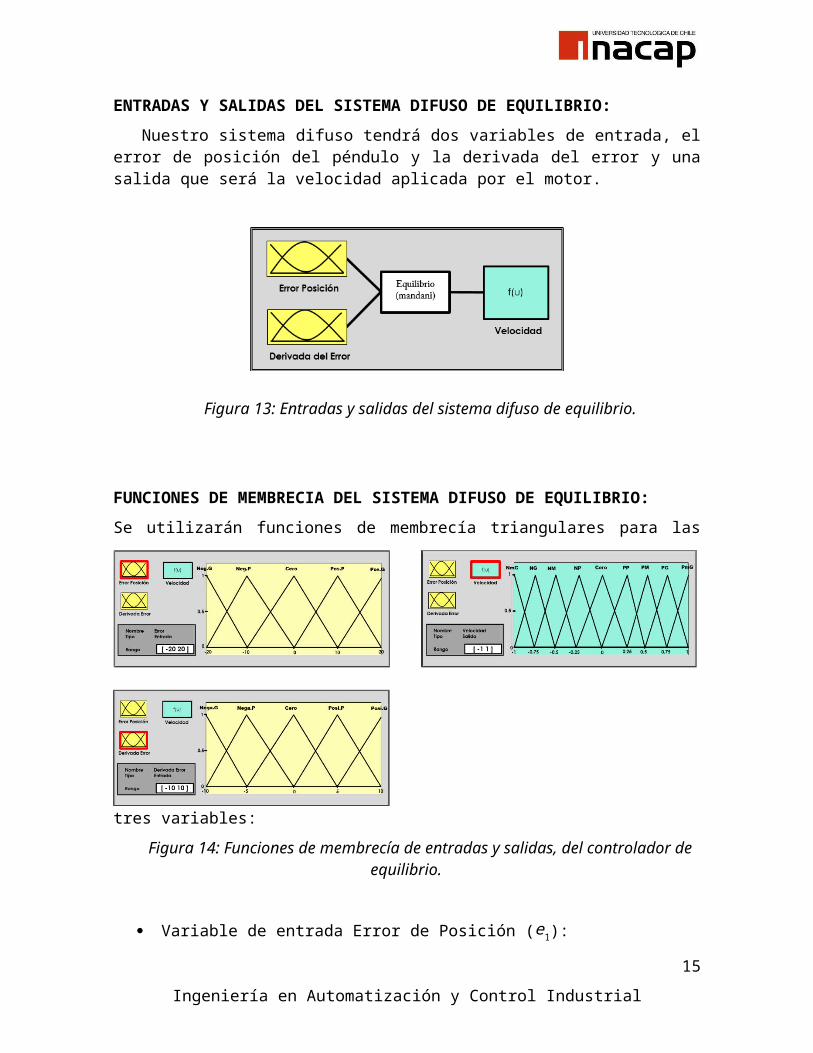
Tabla 3: Costos específicos y total asociados al proyecto.
COMPARACIÓN:
Se realizó una cotización con una empresa extranjera (Quanser), que está dedicada a la venta de prototipos experimentales como el péndulo invertido rotacional, y se procedió a hacer una comparación en términos de costo asociado con el prototipo desarrollado en nuestro proyecto:
El prototipo cotizado se muestra en la siguiente figura:
16
Ingeniería en Automatización y Control Industrial
Materiales Costo
Electrónicos:
Motor C.C Pitman $50.000
Encoder Yumo $25.525
Arduino Mega 2560 $38.000
Controlador Dual de Motor POLOLU $36.000
Cable conexión USB $3.000
Borneras de conexión $1000
Cables $500
Estructural:
Estructura Base $157.975
Soporte de Controladores $4.000
Software:
Matlab Simulink $1.440.884
Otros
Horas Hombre $2.850.646
TOTAL $4.607.530
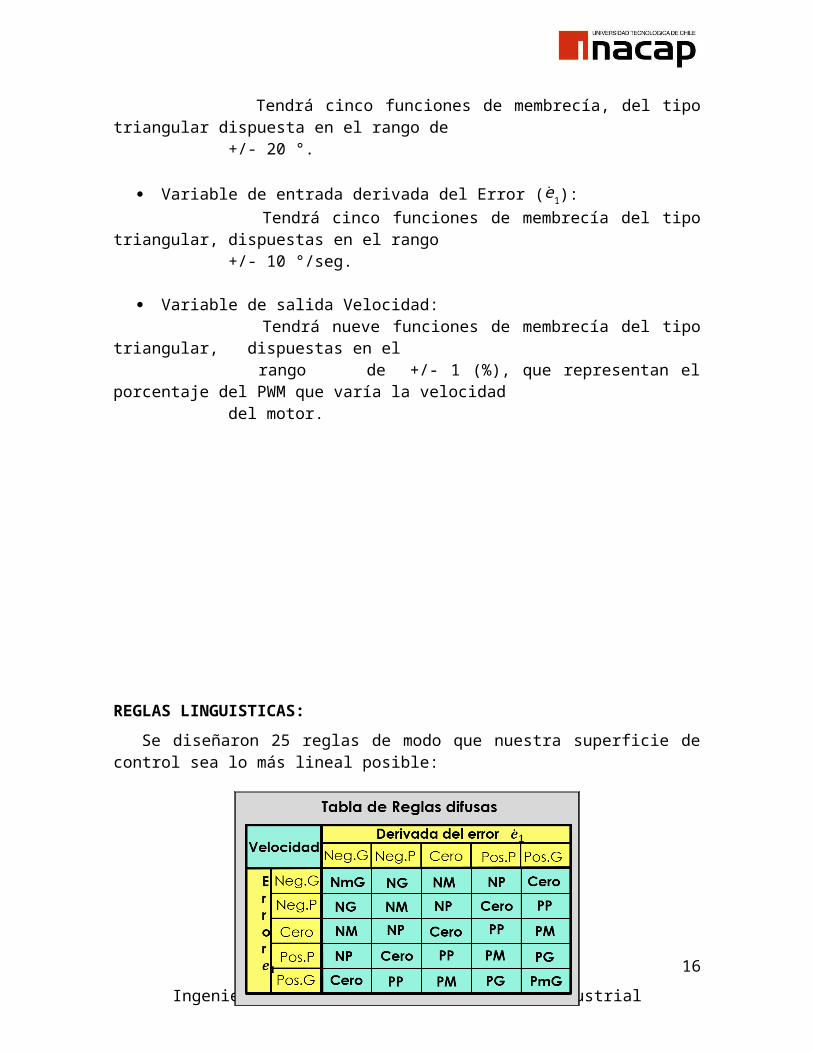
Figura 21: Prototipo QUANSER. Tabla 4: Costos prototipo QUANSER.
La comparación en costos, se realiza considerando que el proyecto se desarrollará con un software específico, en este caso Matlab 2013, por lo que al valor de la estructura, se le sumará el valor de este software.
La diferencia en costos existente, entre ambos prototipos, se expresa en la siguiente tabla:
Prototipo Costo
Prototipo Quanser + Matlab 2013 $6.050.234
Prototipo desarrollado + Matlab 2013 $4.607.530
Diferencia $1.442.704
Tabla 5: Comparación entre ambos prototipos.
5 RESULTADO EXPERIMENTALES
A partir de resultados experimentales realizados en los laboratorios, se desprende la siguiente grafica de tendencia, obtenida a partir de una herramienta de SIMULINK que nos permite visualizar el comportamiento de las variables del sistema.
En este caso se representa en la gráfica (22), el rango de giro completo del péndulo desde 0° a 360°, donde la curva de color azul representa la posición angular del péndulo y
17
Ingeniería en Automatización y Control Industrial
Materiales Costo
Amplificador
Estructura metálica
Tarjeta de adquisición
Material didáctico
TOTAL $4.609.350
la línea de color rojo, la referencia en este caso 180°, donde el sistema alcanza su posición invertida o su punto de equilibrio inestable.
Figura 22: Señal obtenida de Referencia vs Posicion Actual del péndulo.
Se aprecia claramente que el sistema en su inicio (t= 0) se encuentra en su posición de reposo en 0°, como se propone teóricamente.
Se da inicio al controlador e inmediatamente produce una oscilación para sacar al péndulo de su posición reposo, a continuación genera cuatro oscilaciones controladas, logrando llevar el péndulo a la región de control de equilibrio, en 4.3 segundos aproximadamente, un tiempo aceptable y destacando que solo se aplicaron fuerzas pequeñas, aprovechando la inercia con que se mueve el péndulo y con ello utilizando la mínima energía.
Una vez alcanzada la región del control de equilibrio, el controlador logra equilibrarlo a los 5.2 segundos, un tiempo muy óptimo y con sólo un pequeño sobrepaso y una posterior oscilación, además, a partir del segundo 11 de la gráfica (22), se introducen dos perturbaciones pequeñas en el brazo, las que son controladas rápidamente, demostrando con ello la robustez de la lógica difusa como controlador.
Cabe destacar que el controlador de levantamiento, una vez que el péndulo cae de su posición invertida es capaz de llevarlo nuevamente hacia arriba, todas las veces que fuera necesario hacerlo.
CONCLUSIONES
Producto de un largo proceso, ha sido posible llegar una serie de conclusiones que se describen como sigue:
Se construyó una planta didáctica para ser utilizada en los distintos laboratorios de control. El prototipo se caracteriza por ser pequeño y de fácil movilidad,
18
Ingeniería en Automatización y Control Industrial
con alta resistencia a vibraciones, por el tipo de material de la estructura. Lo anterior, ayuda a no introducir perturbaciones externas, al momento de la implementación práctica de los controladores en laboratorio.
La ventaja que presenta el controlador difuso de no involucrar modelos matemáticos en el diseño del controlador, tuvo como consecuencia el realizar extensas pruebas para obtener un conocimiento absoluto y total sobre el sistema. Producto de aquello, mediante prueba y error, el controlador fue optimizado, sujeto a cambios en sus reglas y funciones de membrecía, de forma de alcanzar la mejor respuesta.
Se identifica, como punto importante de la respuesta de control, la modificación que se realizó en el tipo de ejecución del controlador, ya que inicialmente se utilizó comunicación serial para que el control lo ejecutara el computador, obteniendo una respuesta lenta e insatisfactoria, debido a que este sistema es muy sensible y se debe tener un control cada milisegundo.
Por lo anterior, se determinó utilizar un control en tiempo real, realizando una investigación exhaustiva, sobre de qué modo podríamos implementar este control en el microcontrolador, a partir de un diagrama en bloque de SIMULINK Es preciso mencionar que, esta etapa involucró un mayor tiempo de investigación, debido a la carencia informativa, en el estado de la técnica referente a este tipo de tecnología.
Los resultados obtenidos, realizada esta modificación, mejoraron notablemente desde el punto de vista de reacción del sistema de control, por lo que se destaca como fundamental en el funcionamiento final del proyecto.
De esta forma, se logra el objetivo de innovar al implementar la lógica, difusa en ambos problemas de control y el de ejecutar dicho control, en el microcontrolador a partir de un diagrama en bloques diseñado en SIMULINK.
En términos de costos, el prototipo desarrollado otorga ventajas al realizar una comparación con los existentes en el mercado, puesto que, resulta más accesible que los sistemas cotizados, los que tienen un elevado costo.
Se desarrolló una metodología basada en guías didácticas, para el diseño del controlador difuso y su posterior ejecución en hardware, desde el nivel más básico al avanzado, de modo que los alumnos puedan realizar experiencias y posibles futuros proyectos del área de control automático, con la implementación de nuevas tecnologías de esta área.
Por lo anterior, el aporte que se identifica con este proyecto consiste en contribuir al desarrollo de la investigación de las nuevas tecnologías, las que pueden ser utilizadas desde los laboratorios de la Universidad así como también, a las aplicaciones y procesos existentes en la industria de nuestro país.
19
Ingeniería en Automatización y Control Industrial