Movimiento armónico
20
INSTITUTO UNIVERSITARIO DE TECNOLOGÍA “ANTONIO JOSÉ DE SUCRE” EXTENSIÓN BARQUISIMETO DINAMICA ROTACIONAL - ELASTICIDAD - MOVIMIENTO OSCILATORIO - M.A.S
Transcript of Movimiento armónico
INSTITUTO UNIVERSITARIO DE TECNOLOGÍA “ANTONIO JOSÉ DE SUCRE”
EXTENSIÓN BARQUISIMETO
Randy Hernandez C.I Nº 22.329.684
DINAMICA ROTACIONAL - ELASTICIDAD - MOVIMIENTO
OSCILATORIO - M.A.S
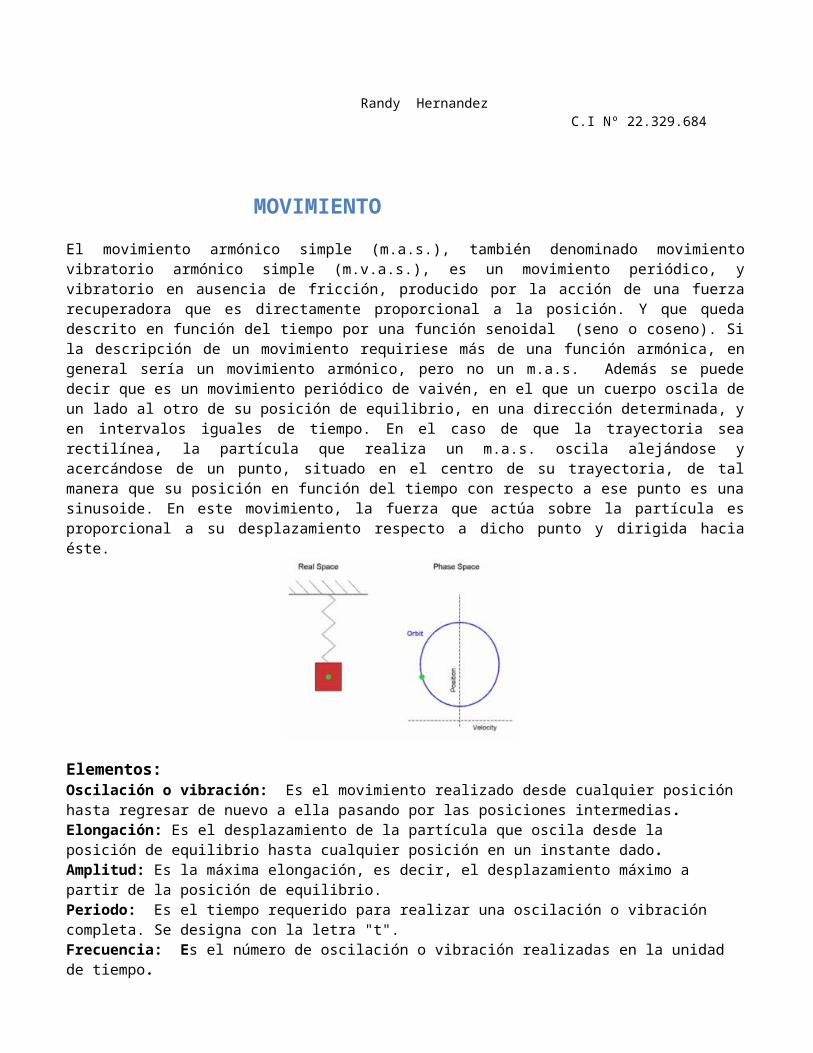
El movimiento armónico simple (m.a.s.), también denominado movimiento vibratorio armónico simple (m.v.a.s.), es un movimiento periódico, y vibratorio en ausencia de fricción, producido por la acción de una fuerza recuperadora que es directamente proporcional a la posición. Y que queda descrito en función del tiempo por una función senoidal (seno o coseno). Si la descripción de un movimiento requiriese más de una función armónica, en general sería un movimiento armónico, pero no un m.a.s. Además se puede decir que es un movimiento periódico de vaivén, en el que un cuerpo oscila de un lado al otro de su posición de equilibrio, en una dirección determinada, y en intervalos iguales de tiempo. En el caso de que la trayectoria sea rectilínea, la partícula que realiza un m.a.s. oscila alejándose y acercándose de un punto, situado en el centro de su trayectoria, de tal manera que su posición en función del tiempo con respecto a ese punto es una sinusoide. En este movimiento, la fuerza que actúa sobre la partícula es proporcional a su desplazamiento respecto a dicho punto y dirigida hacia éste.
Elementos:Oscilación o vibración: Es el movimiento realizado desde cualquier posición hasta regresar de nuevo a ella pasando por las posiciones intermedias.Elongación: Es el desplazamiento de la partícula que oscila desde la posición de equilibrio hasta cualquier posición en un instante dado.Amplitud: Es la máxima elongación, es decir, el desplazamiento máximo a partir de la posición de equilibrio.Periodo: Es el tiempo requerido para realizar una oscilación o vibración completa. Se designa con la letra "t".Frecuencia: Es el número de oscilación o vibración realizadas en la unidad de tiempo.Posición de equilibrio: Es la posición en la cual no actúa ninguna fuerza neta sobre la partícula oscilante.
Tipos de MovimientoMovimiento periódico: Se dice períódico cuando a intervalos iguales de tiempo, todas las variables del movimiento (velocidad, aceleración, etc,) toman el mismo valor.Movimiento oscilatorio: Son los movimientos periódicos en los que la distancia del móvil al centro, pasa alternativamente por un valor máximo y un mínimo.Movimiento vibratorio: Es un movimiento oscilatorio que tiene su origen en el punto medio, de forma que las separaciones a ambos lados, llamadas amplitudes, son iguales.Movimiento Vibratorio armónico simple : Es un movimiento vibratorio con aceleración variable, producido por una fuerza que se origina cuando el cuerpo se separa de su posición de equilibrio.
Características de un M.A.S. son:Como los valores máximo y mínimo de la función seno son +1 y -1, el movimiento se realiza en una región del eje X comprendida entre -A y +A.La función seno es periódica y se repite cada 2p, por tanto, el movimiento se repite cuando el argumento de la función seno se incrementa en 2p, es decir, cuando transcurre un tiempo P tal que w (t+P)+j=w t+j+2p .
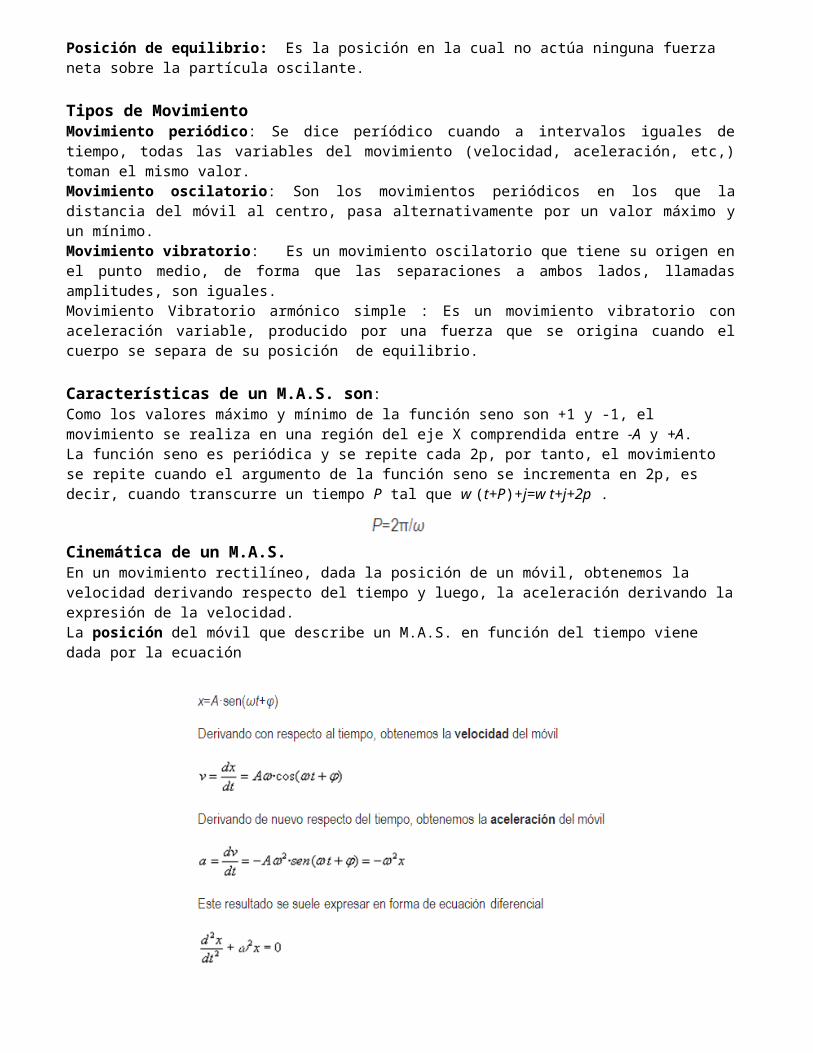
Cinemática de un M.A.S.En un movimiento rectilíneo, dada la posición de un móvil, obtenemos la velocidad derivando respecto del tiempo y luego, la aceleración derivando la expresión de la velocidad.La posición del móvil que describe un M.A.S. en función del tiempo viene dada por la ecuación
MOVIMIENTO ARMONICO
Dinámica de un M.A.S.
Aplicando la segunda ley de Newton obtenemos la expresión de la fuerza necesaria para que un móvil de masa m describa un M.A.S. Esta fuerza es proporcional al desplazamiento x y de sentido contrario a éste.
Energía de un M.A.S
Si no existe rozamiento entre el suelo y la masa, la energía mecánica de esta última se conserva. Ya se vio en el apartado de trsbsjo que la fuerza recuperadora del muelle es una fuerza conservativa y se calculó su energía potencial asociada, que es una parábola:
En la siguiente figura se ha representado la energía total, la energía potencial elástica y la cinética para distintas posiciones de una partícula que describe un movimiento armónico simple.

La energía mecánica se conserva, por lo que para cualquier valor de x la suma de la energía cinética y potencial debe ser siempre:
Trabajo de rotaciónEl movimiento de rotación de una partícula se realiza cuando ésta describe circunferencias de radio r alrededor de un eje de giro. Al ángulo girado se le representa con la letra griega θ y se mide en radianes; la velocidad de rotación o velocidad angular se representa conω y se mide en radianes/segundo
La relación entre las magnitudes angulares y las del movimiento lineal son sencillas si recordamos la expresión de la longitud de la circunferencia (l = 2 · π · r)
distancia = ángulo · radiod = θ · r
v = ω · r
Con estas expresiones, la energía cinética de rotación de una partícula se expresa como :
Cuando se trata de un sólido con muchas partículas, la energía de rotación del sólido es la suma de todas las energías de cada una de las partículas o trozos que lo componen
La expresión Σ(mi·ri²) se denomina momento de inercia, y de forma análoga a la masa (o masa de inercia), mide la dificultad que tiene un objeto a ponerse en movimiento de rotación respecto a un eje de giro. Con esto, la energía de rotación viene dada por la siguiente expresión :
Al igual que una fuerza realiza trabajo cuando produce un desplazamiento, en la mecánica de rotación se realiza un trabajo cuando se produce un giro por efecto de una fuerza.

El trabajo de la fuerza F viene dado por la expresión: W = F . d y, como la distancia recorrida es: d = θ · rSe obtiene como trabajo de rotación: W = F · θ · rY, por fín, al producto de la fuerza por la distancia del punto de aplicación de ésta al eje de giro mide la capacidad de producir un giro de esa fuerza, y se denomina par o momento de la fuerza, con lo cual, la expresión del trabajo de rotación queda como:
y la potencia de rotación es la velocidad con que se produce un trabajo de rotación, ésto es, el resultado de dividir el trabajo entre el tiempo:
LEYES M.A.S
La ley de HookeSi hablamos de las fuerzas, no podemos dejar de lado la gran y mundialmente conocida Ley de Hooke, a través de la cual, nos basamos para hacer la práctica del dinamómetro, ya mencionada anteriormente. Esta consiste en:La deformación de un cuerpo elástico es directamente proporcional a la fuerza que la produce:
F = k · Δ(x) (Fuerza=constante elástica de muelle por el alargamiento).
Para medir la intensidad de las fuerzas se utiliza el dinamómetro.
Y pasemos al tema Newton. Isaac Newton fue un científico inglés, denominado como "el padre de la mecánica"
Ley de Newton2º Ley: La aceleración de un cuerpo es proporcional a la fuerza resultante ejercida sobre el mismo, con la misma dirección y sentido, e inversamente proporcional a la masa del cuerpo
Lo expresamos con la conocida : F = ma
Otro ejemplo de Movimiento Armónico Simple es el sistema masa-resorte que consiste en una masa “m” unida a un resorte, que a su vez se halla fijo a una pared, como se muestra en la figura. Se supone movimiento sin rozamiento sobre la superficie horizontal.
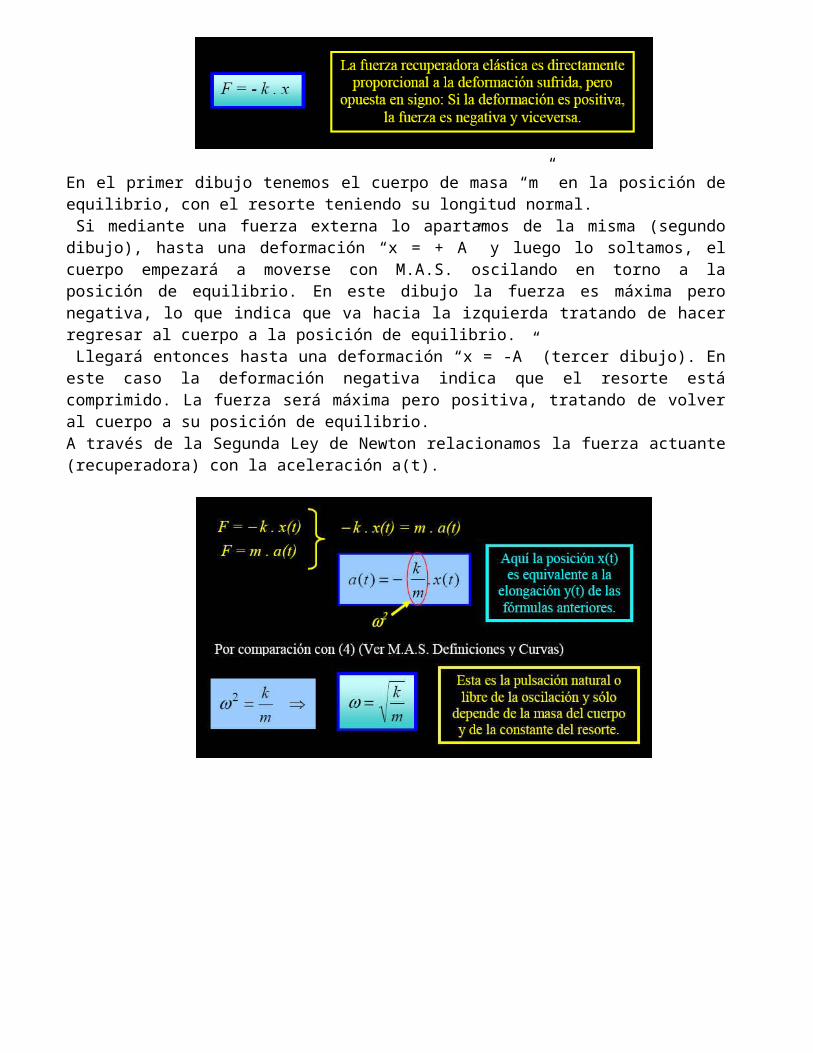
El resorte es un elemento muy común en máquinas. Tiene una longitud normal, en ausencia de fuerzas externas. Cuando se le aplican fuerzas se deforma alargándose o acortándose en una magnitud “x” llamada “deformación”. Cada resorte se caracteriza mediante una constante “k” que es igual a la fuerza por unidad de deformación que hay que aplicarle. La fuerza que ejercerá el resorte es igual y opuesta a la fuerza externa aplicada (si el resorte deformado está en reposo) y se llama fuerza recuperadora elástica.Dicha fuerza recuperadora elástica es igual a :
En el primer dibujo tenemos el cuerpo de masa “m” en la posición de equilibrio, con el resorte teniendo su longitud normal. Si mediante una fuerza externa lo apartamos de la misma (segundo dibujo), hasta una deformación “x = + A” y luego lo soltamos, el cuerpo empezará a moverse con M.A.S. oscilando en torno a la posición de equilibrio. En este dibujo la fuerza es máxima pero negativa, lo que indica que va hacia la izquierda tratando de hacer regresar al cuerpo a la posición de equilibrio. Llegará entonces hasta una deformación “x = -A” (tercer dibujo). En este caso la deformación negativa indica que el resorte está comprimido. La fuerza será máxima pero positiva, tratando de volver al cuerpo a su posición de equilibrio.A través de la Segunda Ley de Newton relacionamos la fuerza actuante (recuperadora) con la aceleración a(t).
SISTEMA MASA- RESORTE

PÉNDULO SIMPLE
El péndulo simple (también llamado péndulo matemático o péndulo ideal) es un sistema idealizado constituido por una partícula de masa m que está suspendida de un punto fijo o mediante un hilo inextensible y sin peso. Naturalmente es imposible la realización práctica de un péndulo simple, pero si es accesible a la teoría.El péndulo simple o matemático se denomina así en contraposición a los péndulos reales, compuestos o físicos, únicos que pueden construirse
Péndulo simple
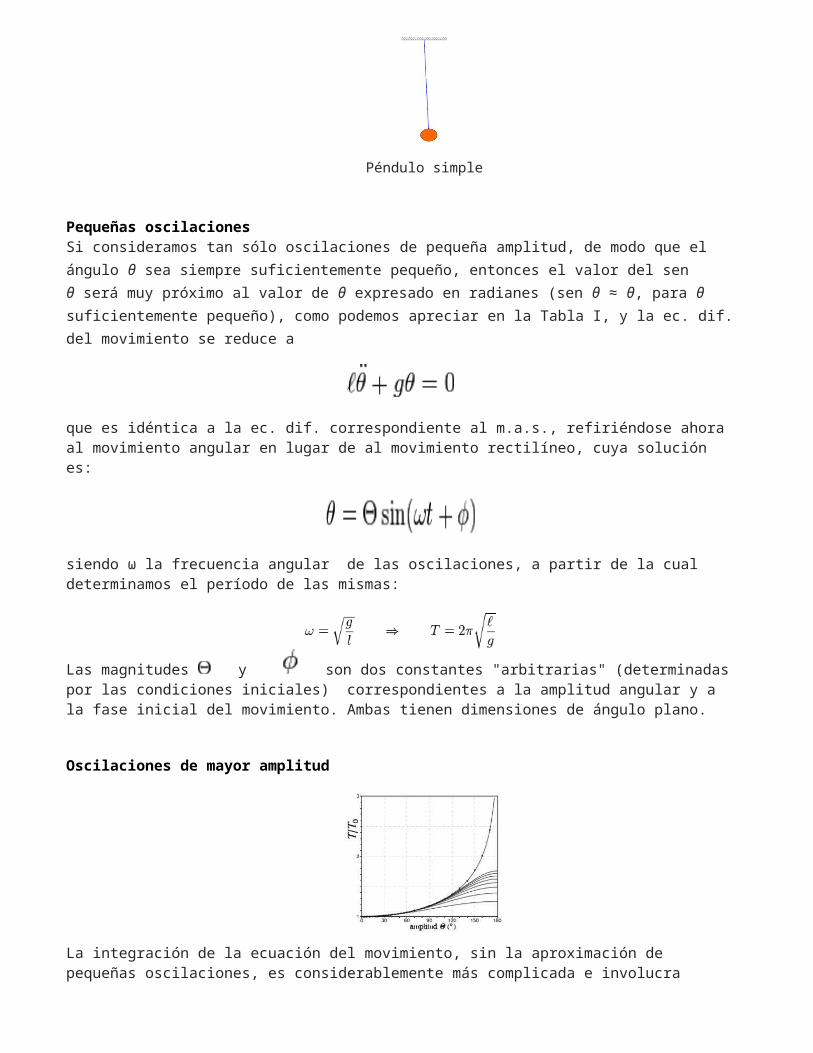
Pequeñas oscilacionesSi consideramos tan sólo oscilaciones de pequeña amplitud, de modo que el ángulo θ sea siempre suficientemente pequeño, entonces el valor del sen θ será muy próximo al valor de θ expresado en radianes (sen θ ≈ θ, para θ suficientemente pequeño), como podemos apreciar en la Tabla I, y la ec. dif. del movimiento se reduce a
que es idéntica a la ec. dif. correspondiente al m.a.s., refiriéndose ahora al movimiento angular en lugar de al movimiento rectilíneo, cuya solución es:
siendo ω la frecuencia angular de las oscilaciones, a partir de la cual determinamos el período de las mismas:
Las magnitudes y son dos constantes "arbitrarias" (determinadas por las condiciones iniciales) correspondientes a la amplitud angular y a la fase inicial del movimiento. Ambas tienen dimensiones de ángulo plano.
Oscilaciones de mayor amplitud
PÉNDULO
La integración de la ecuación del movimiento, sin la aproximación de pequeñas oscilaciones, es considerablemente más complicada e involucra integrales elípticas de primera especie, por lo que omitimos el desarrollo que llevaría a la siguiente solución:
Dependencia del período del péndulo con la amplitud angular de las oscilaciones. Para pequeñas oscilaciones, el cociente T/T0 tiende a la unidad 1; pero tiende a infinito para ángulos cercanos a 180º.donde es la amplitud angular. Así pues, el periodo es función de la amplitud de las oscilaciones.En la Figura hemos representado gráficamente la variación de T (en unidades de T0) en función de Θ, tomando un número creciente de términos en la expresión anterior. Se observará que el periodo T difiere significativamente del correspondiente a las oscilaciones de pequeña amplitud (T0) cuando Θ > 20º. Para valores de Θ suficientemente pequeños, la serie converge muy rápidamente; en esas condiciones será suficiente tomar tan sólo el primer término correctivo e, incluso, sustituir senΘ/2 por Θ/2, de modo que tendremos
donde Θ se expresará en radianes. Esta aproximación resulta apropiada en gran parte de las situaciones que encontramos en la práctica; de hecho, la corrección que introduce el término Θ2/16 representa menos de 0.2% para amplitudes inferiores a 10°.Para oscilaciones de pequeña amplitud, las expresiones anteriores se reducen a
PÉNDULO COMPUESTO
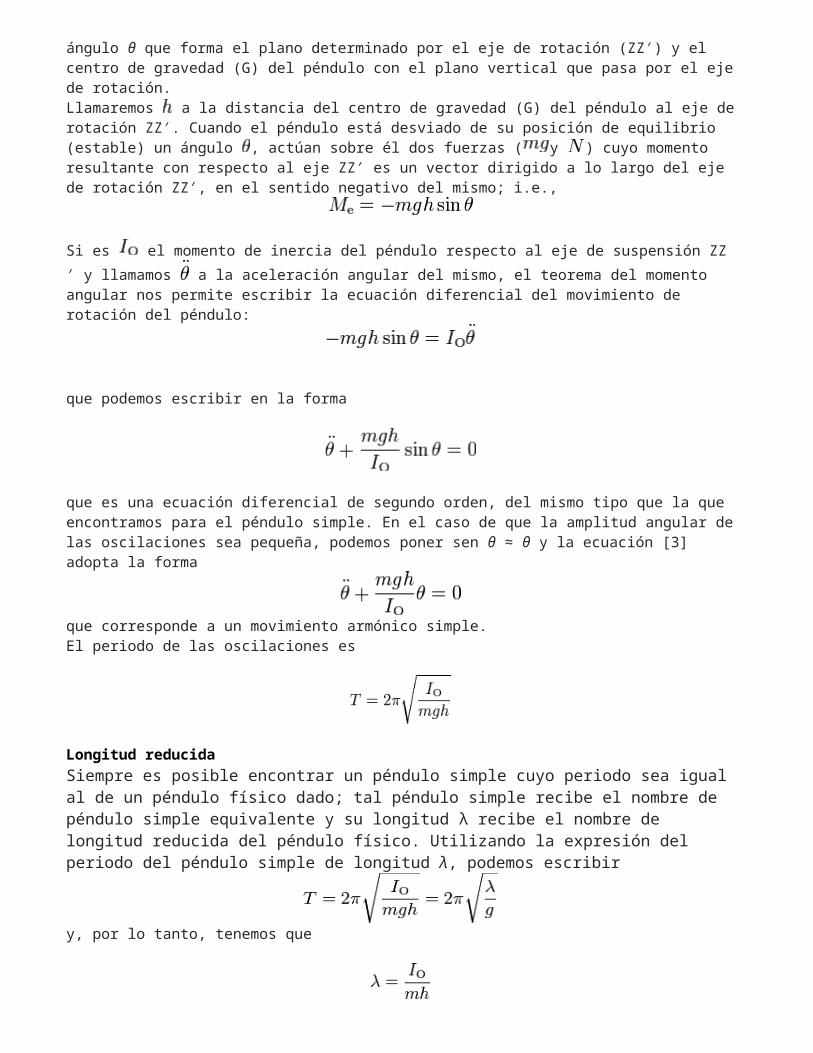
Un péndulo físico o péndulo compuesto es cualquier cuerpo rígido que pueda oscilar libremente en el campo gravitatorio alrededor de un eje horizontal fijo, que no pasa por su centro de masa.
Péndulo físico.
Deducción del periodoEl péndulo físico es un sistema con un sólo grado de libertad; el correspondiente a la rotación alrededor del eje fijo ZZ′ (Figura 1). La posición del péndulo físico queda determinada, en cualquier instante, por el ángulo θ que forma el plano determinado por el eje de rotación (ZZ′) y el centro de gravedad (G) del péndulo con el plano vertical que pasa por el eje de rotación.Llamaremos a la distancia del centro de gravedad (G) del péndulo al eje de rotación ZZ′. Cuando el péndulo está desviado de su posición de equilibrio (estable) un ángulo , actúan sobre él dos fuerzas ( y ) cuyo momento resultante con respecto al eje ZZ′ es un vector dirigido a lo largo del eje de rotación ZZ′, en el sentido negativo del mismo; i.e.,
Si es el momento de inercia del péndulo respecto al eje de suspensión ZZ′ y llamamos a la aceleración angular del mismo, el teorema del momento angular nos permite escribir la ecuación diferencial del movimiento de rotación del péndulo:
que podemos escribir en la forma
que es una ecuación diferencial de segundo orden, del mismo tipo que la que encontramos para el péndulo simple. En el caso de que la amplitud angular de las oscilaciones sea pequeña, podemos poner sen θ ≈ θ y la ecuación [3] adopta la forma
que corresponde a un movimiento armónico simple.El periodo de las oscilaciones es
Longitud reducidaSiempre es posible encontrar un péndulo simple cuyo periodo sea igual al de un péndulo físico dado; tal péndulo simple recibe el nombre de péndulo simple equivalente y su longitud λ recibe el nombre de longitud reducida del péndulo físico. Utilizando la expresión del periodo del péndulo simple de longitud λ, podemos escribir
y, por lo tanto, tenemos que
Así, en lo que concierne al periodo de las oscilaciones de un péndulo físico, la masa del péndulo puede imaginarse concentrada en un punto (O′) cuya distancia al eje de suspensión es λ. Tal punto recibe el nombre de centro de oscilación. Todos los péndulos físicos que tengan la misma longitud reducida λ (respecto al eje de suspensión) oscilarán con la misma frecuencia ; i.e., la frecuencia del péndulo simple equivalente, de longitud λ.
PENDULO DE TORCIÓN
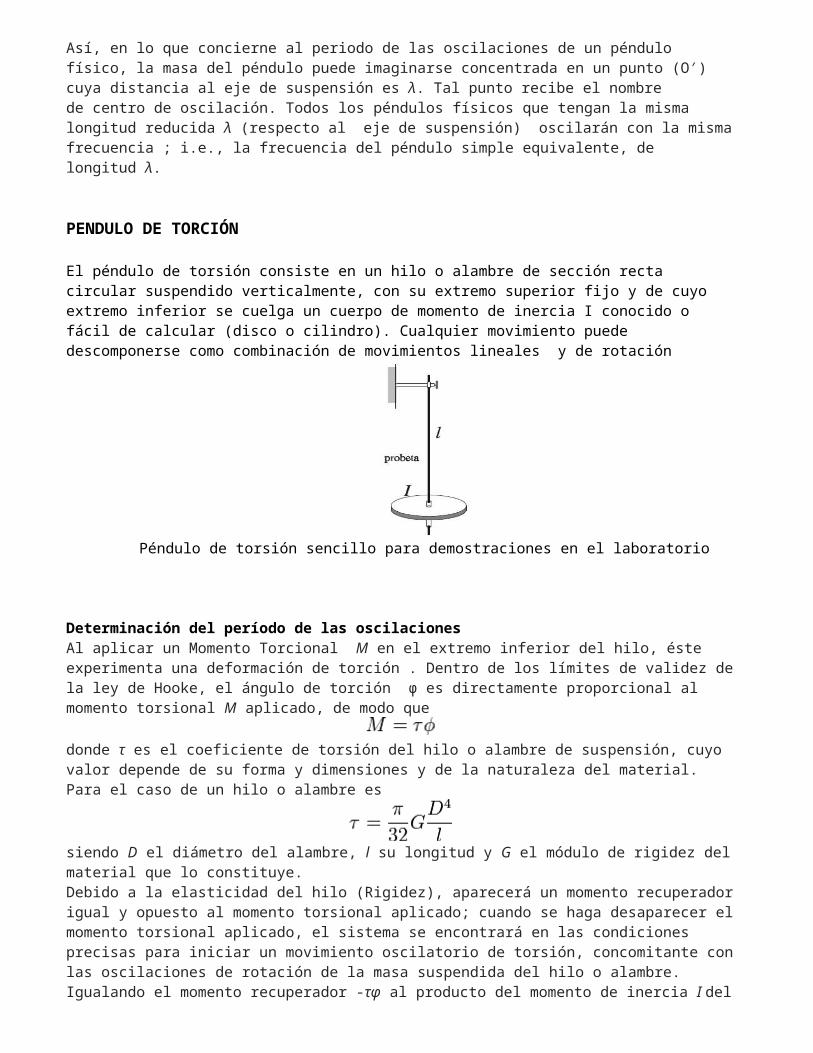
El péndulo de torsión consiste en un hilo o alambre de sección recta circular suspendido verticalmente, con su extremo superior fijo y de cuyo extremo inferior se cuelga un cuerpo de momento de inercia I conocido o fácil de calcular (disco o cilindro). Cualquier movimiento puede descomponerse como combinación de movimientos lineales y de rotación
Péndulo de torsión sencillo para demostraciones en el laboratorio
Determinación del período de las oscilacionesAl aplicar un Momento Torcional M en el extremo inferior del hilo, éste experimenta una deformación de torción . Dentro de los límites de validez de la ley de Hooke, el ángulo de torción φ es directamente proporcional al momento torsional M aplicado, de modo que
donde τ es el coeficiente de torsión del hilo o alambre de suspensión, cuyo valor depende de su forma y dimensiones y de la naturaleza del material. Para el caso de un hilo o alambre es
siendo D el diámetro del alambre, l su longitud y G el módulo de rigidez del material que lo constituye.Debido a la elasticidad del hilo (Rigidez), aparecerá un momento recuperador igual y opuesto al momento torsional aplicado; cuando se haga desaparecer el momento torsional aplicado, el sistema se encontrará en las condiciones precisas para iniciar un movimiento oscilatorio de torsión, concomitante con las oscilaciones de rotación de la masa suspendida del hilo o alambre. Igualando el momento recuperador -τφ al producto del momento de inercia I del sistema por la aceleración angular α=d2φ/dt2, tenemos la ecuación diferencial del movimiento de rotación:
que es formalmente idéntica a la ec. dif. correspondiente a un movimiento armónico simple. Así pues, las oscilaciones del péndulo de torsión son armónicas, y la frecuencia angular y el período de las mismas son
NOTA: El mecanismo de los relojes de pulsera mecánicos, accionado mediante un resorteilación que puede calcularse mediante la fórmula anterior. El reloj está regulado mediante el ajuste del momento de inercia de la rueda de inercia (mediante unos tornillos de la rueda de inercia) y de forma más precisa mediante el cambio del coeficiente de torsión .
Usos y aplicacionesEl péndulo de torsión constituye el fundamento de la balanza de torción y de un buen número de dispositivos y mecanismos.
Medida de módulo de rigidezMediante la determinación precisa del período de oscilación del péndulo de torsión podemos calcular el valor del coeficiente de torsión τ de la probeta , y a continuación el valor del módulo de rigidez G del material ensayado.
Medida de momentos de inerciaAñadiendo al cuerpo suspendido otro cuerpo de momento de inercia desconocido , el nuevo periodo de oscilación por torsión será:
de modo que eliminando entre las ecuaciones (4) y (5) obtenemos
que nos permite calcular el momento de inercia del cuerpo añadido.
LEYES DEL PÉNDULO
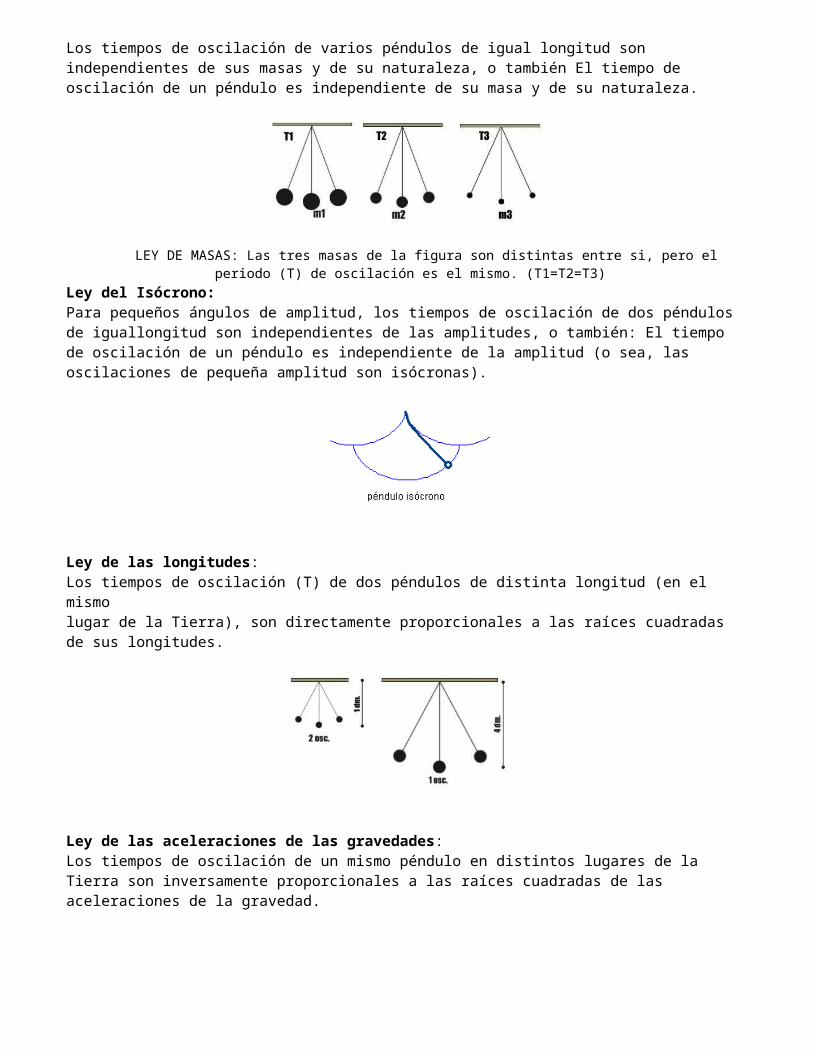
Ley de las masas: Los tiempos de oscilación de varios péndulos de igual longitud son independientes de sus masas y de su naturaleza, o también El tiempo de oscilación de un péndulo es independiente de su masa y de su naturaleza.
LEY DE MASAS: Las tres masas de la figura son distintas entre si, pero el periodo (T) de oscilación es el mismo. (T1=T2=T3)
Ley del Isócrono: Para pequeños ángulos de amplitud, los tiempos de oscilación de dos péndulos de iguallongitud son independientes de las amplitudes, o también: El tiempo de oscilación de un péndulo es independiente de la amplitud (o sea, las oscilaciones de pequeña amplitud son isócronas).
Ley de las longitudes: Los tiempos de oscilación (T) de dos péndulos de distinta longitud (en el mismolugar de la Tierra), son directamente proporcionales a las raíces cuadradas de sus longitudes.
Ley de las aceleraciones de las gravedades:Los tiempos de oscilación de un mismo péndulo en distintos lugares de la Tierra son inversamente proporcionales a las raíces cuadradas de las aceleraciones de la gravedad.
OSCILACIONES
Oscilación libreEn el caso en que un sistema reciba una única fuerza y oscile libremente hasta detenerse por causa de la amortiguación, recibe el nombre de oscilación libre. Éste es por ejemplo el caso cuando pulsamos la cuerda de una guitarra.
Oscilación libre. La envolvente dinámica muestra fases de ataque y caída
Oscilación amortiguadaSi en el caso de una oscilación libre nada perturbara al sistema en oscilación, éste seguiría vibrando indefinidamente. En la naturaleza existe lo que se conoce como fuerza de fricción (o rozamiento), que es el producto del choque de las partículas (moléculas) y la consecuente transformación de determinadas cantidades de energía en calor. Ello resta cada vez más energía al movimiento (el sistema oscilando), produciendo finalmente que el movimiento se detenga. Esto es lo que se conoce como oscilación amortiguada.
Oscilación amortiguada
En la oscilación amortiguada la amplitud de la misma varía en el tiempo (según una curva exponencial), haciéndose cada vez más pequeña hasta llegar a cero. Es decir, el sistema (la partícula, el péndulo, la cuerda de la guitarra) se detiene finalmente en su posición de reposo.La representación matemática es , donde es el coeficiente de amortiguación. Notemos que la amplitud es también una función del tiempo (es decir, varía con el tiempo), mientras que a y son constantes que dependen de las condiciones de inicio del movimiento.No obstante, la frecuencia de oscilación del sistema (que depende de propiedades intrínsecas del sistema, es decir, es característica del sistema) no varía (se mantiene constante) a lo largo de todo el proceso. (Salvo que se estuviera ante una amortiguación muy grande.)
Oscilación autosostenidaSi logramos continuar introduciendo energía al sistema, reponiendo la que se pierde debido a la amortiguación, logramos lo que se llama una oscilación autosostenida. Éste es por ejemplo el caso cuando en un violín frotamos la cuerda con el arco, o cuando soplamos sostenidamente una flauta.
Oscilación autosostenida.La envolvente dinámica presenta una fase casi estacionaria (FCE), además de las fases de ataque y caída
La acción del arco sobre la cuerda repone la energía perdida debido a la amortiguación, logrando una fase (o estado) casi estacionaria. Preferimos llamarla fase casi estacionaria -y no estado estacionario, como suele encontrarse en alguna literatura- debido a que, en condiciones prácticas, resulta sumamente difícil que la energía que se introduce al sistema sea exactamente igual a la que se pierde producto de la amortiguación. En
consecuencia, la amplitud durante la fase casi estacionaria no es en rigor constante, sino que sufre pequeñas variaciones, cuya magnitud dependerá de nuestra habilidad para compensar la energía perdida.Si la energía que se repone al sistema en oscilación es menor a la que se pierde producto de la fricción obtenemos una oscilación con amortiguación menor, cuyas características dependen de la relación existente entre la energía perdida y la que se continúa introduciendo. También en este caso el sistema termina por detenerse, aunque demore más tiempo. (En música lo llamaríamos decrescendo.)Por el contrario, si la energía que introducimos al sistema es mayor que la que se pierde por la acción de la fricción, la amplitud de la oscilación crece en dependencia de la relación existente entre la energía perdida y la que se continúa introduciendo. (En música lo llamaríamos crescendo.)
Oscilación forzadaLas oscilaciones forzadas resultan de aplicar una fuerza periódica y de magnitud constante (llamada generadorG) sobre un sistema oscilador (llamado resonador R). En esos casos puede hacerse que el sistema oscile en la frecuencia del generador (ƒg), y no en su frecuencia natural (ƒr). Es decir, la frecuencia de oscilación del sistema será igual a la frecuencia de la fuerza que se le aplica. Esto es lo que sucede por ejemplo en la guitarra, cuando encontramos que hay cuerdas que no pulsamos pero que vibran "por simpatía".Debe tenerse en cuenta que no siempre que se aplica una fuerza periódica sobre un sistema se produce una oscilación forzada. La generación de una oscilación forzada dependerá de las características de amortiguación del sistema generador y de las del resonador, en particular su relación.
ResonanciaSi, en el caso de una oscilación forzada, la frecuencia del generador (ƒg) coincide con la frecuencia natural del resonador (ƒr), se dice que el sistema está en resonancia.La amplitud de oscilación del sistema resonador R depende de la magnitud de la fuerza periódica que le aplique el generador G, pero también de la relación existente entre ƒg y ƒr.Cuanto mayor sea la diferencia ente la frecuencia del generador y la frecuencia del resonador, menor será la amplitud de oscilación del sistema resonador (si se mantiene invariable la magnitud de la fuerza periódica que aplica el generador). O, lo que es lo mismo, cuanto mayor sea la diferencia entre las frecuencias del generador y el resonador, mayor cantidad de energía se requerirá para generar una determinada amplitud en la oscilación forzada (en el resonador). Por el contrario, en el caso en que la frecuencia del generador y la del resonador coincidieran (resonancia), una fuerza de pequeña magnitud aplicada por el generador G puede lograr grandes amplitudes de oscilación del sistema resonador R. La Figura 04 muestra la amplitud de oscilación del sistema resonador, para una magnitud constante de la fuerza periódica aplicada y en función de la relación entre la frecuencia del generador ƒg y la frecuencia del resonador ƒr.
FIGURA 04: Curva de resonancia a = f (t) ƒg/ƒr = 1 => Resonancia
En un caso extremo el sistema resonador puede llegar a romperse. Esto es lo que ocurre cuando un cantante rompe una copa de cristal emitiendo un sonido con la voz. La ruptura de la copa no ocurre solamente debido a la intensidad del sonido emitido, sino fundamentalmente debido a que el cantante emite un sonido que contiene una frecuencia igual a la frecuencia natural de la copa de cristal, haciéndola entrar en resonancia. Si las frecuencias no coincidieran, el cantante debería generar intensidades mucho mayores, y aún así sería dudoso que lograra romper la copa.El caso de resonancia es importante en el estudio de los instrumentos musicales, dado que muchos de ellos tienen lo que se conoce como resonador, como por ejemplo la caja en la guitarra. Las frecuencias propias del sistema resonador (caja de la guitarra) conforman lo que se denomina la curva de respuesta del resonador. Los parciales cuyas frecuencias caigan dentro de las zonas de resonancia de la caja de la guitarra serán favorecidos frente a los que no, de manera que el resonador altera el timbre de un sonido
HIDROSTÁTICA
La hidrostática es la rama de la mecánica de fluidos que tiene como objetivo estudiar los líquidos en estado de reposo; es decir, sin que existan fuerzas que alteren su movimiento o posición.Generalmente varios de sus principios también se aplican a los gases. El término de fluído se aplica a líquidos y gases porque ambos tienen propiedades comunes. No obstante conviene recordar que un gas puede comprimirse con facilidad, mientras un líquido es prácticamente incompresibleEl Principio Fundamental de la Hidrostática establece que si nos sumergimos en un fluido(líquido o gas), la presión ejercida por éste es proporcional a la profundidad a que nos encontremos:
Los principales teoremas que respaldan el estudio de la hidrostática son el principio de Pascal y el Principio de Arquímides.
Principio de PascalEl principio de Pascal es una ley enunciada por el físico y matemático francés Blaise Pascal (1623 – 1662) que se resume en la frase: «el incremento de la presión aplicada a una superficie de un fluido incompresible (generalmente se trata de un líquido incompresible), contenido en un recipiente indeformable, se transmite con el mismo valor a cada una de las partes del mismo».Es decir, que si se aplica presión a un liquido no comprimible en un recipiente cerrado, ésta se transmite con igual intensidad en todas direcciones y sentidos. Este tipo de fenómeno se puede apreciar, por ejemplo, en la prensa hidráulica o en el gato hidráulico; ambos dispositivos se basan en este principio. La condición de que el recipiente sea indeformable es necesaria para que los cambios en la presión no actúen deformando las paredes del mismo en lugar de transmitirse a todos los puntos del líquido.También podemos observar aplicaciones del principio de Pascal en las prensas hidráulicas, en los elevadores hidráulicos, en los frenos hidráulicos y en los puentes hidráulicos.
El funcionamiento de la prensa hidráulica ilustra el principio de Pascal
Principio de ArquímedesEl principio de Arquímedes establece que cualquier cuerpo sólido que se encuentre sumergido total o parcialmente en un fluido será empujado en dirección ascendente por una fuerza igual al peso del volumen del líquido desplazado por el cuerpo sólido. El objeto no necesariamente ha de estar completamente sumergido en dicho fluido, ya que si el empuje que recibe es mayor que el peso aparente del objeto, éste flotará y estará sumergido sólo parcialmente.
Propiedades de los fluidosLas propiedades de un fluido son las que definen el comportamiento y características del mismo tanto en reposo como en movimiento.Existen propiedades primarias y propiedades secundarias del fluido.