Especificaciones y Lugar de Las Raices
112
• Revision octubre 3 • Leonardo Bermeo
-
Upload
juan-bautista -
Category
Documents
-
view
420 -
download
5
Transcript of Especificaciones y Lugar de Las Raices

• Revision octubre 3
• Leonardo Bermeo

Caracterización del desempeño transitorio de sistemas
A pesar de la diversidad de señales de comando que
pueden existir en un sistema, ha sido habitual
caracterizar la respuesta transitoria de un sistema en
términos de la respuesta a un paso. El cambio brusco en
T=0 permite juzgar propiedades que con otro tipo de
señales no serían ostensibles. Esta, es también, una
vieja costumbre heredada de la Ingeniería Eléctrica.

( )y t
: tiempo de establecimiento.sT
( )eey t
( )r t0.02ee eey y
0.02ee eey y
SP
t
0.9 eey
: tiempo de subidarT0.1 eey
: tiempo de retardodT
Respuesta transitoria en sistemas

Donde asumimos las definiciones:
valor de ( ) en estado estacionario
Tiempo de establecimiento del sistema,
Es el tiempo para el cual la salida está en un franja de
(1 0.02)
Tiempo de Subida.
Ti
:
:
:
empo pa
e
e
e
s
r
e
y
y
T
y t
T
ee
ee
ra el cual la salida alcanza el 90% de su valor final y
por primera vez.
Tiempo de Retardo.
Tiempo para el cual la salida alcanza el 10% de su valor final y
por primera vez.
:
: SP
dT
max
sobrepico, sobrepaso, (overshoot en inglés)
ee
ee
y ySP
y

Polos dominantes y constante de tiempo
Supongamos que tenemos un sistema estable de
elevado orden. Si existe un polo o un par de polos
complejos conjugados que están mucho mas cerca
del origen que los demás, decimos que son
dominantes. Un polo será dominante si
i
Re(polo dominante) (5 10) Re( )
Donde p , denota los demás polos
de ( )
ip
T s
Es decir de 5 a 10 veces más cerca al origen que
Los demás

-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0-20
-15
-10
-5
0
5
10
15
20
Pole-Zero Map
Real Axis
Imagin
ary
Axis
Ejemplo:
2
10000( )
( 1)( 10)( 40 800)G s
s s s s
( 20 20 )( 20 20 )s j s j
Lo podemos aproximar como:
1.25( )
( 1)
(0) (0)
primerorden
primerorden
G ss
G G
Polo dominante
de primer orden

Simulamos la respuesta al paso de los dos sistemas,
encontrando que es buena aproximación el de primer
orden.
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
sistema original
sistema reducido
Step Response
Time (sec)
Am
plit
ude
MATLAB
sis=zpk([],[-1 -10 -20+20*j -20-
20*j],10000)
sisred=tf(1,[1 1])*dcgain(sis)
step(sis,sisred)
legend('sistema
original','sistema reducido')
El numerador lo elegimos de manera que los dos
sistemas tengan la misma respuesta de estado estable.

Puede darse el caso de que los polos dominantes
sean los del sistema de segundo orden como en:
2
10000G( )
( 20) ( 30) ( +4 20)s
s s s s
( 2 4 )( 2 4 )s j s j
segundoorden 2
16.67 G(s)
s +4s+20
G(0) (0)*20segundoorden G
Lo podemos aproximar por el modelo de segundo
orden
-30 -25 -20 -15 -10 -5 0-4
-3
-2
-1
0
1
2
3
4
Pole-Zero Map
Real Axis
Imagin
ary
Axis

Simulamos para comparar la respuesta de los dos
sistemas y se obtiene:
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
sistema originalsistema reducido
Step Response
Time (sec)
Am
plit
ude
Y notamos el parecido en las dos respuestas.
MATLAB
gs=zpk([],[-2+4j -2-4j -20 -30],10000)
gred=tf(1,poly([-2+4j -2-4j]))
gred=gred*dcgain(gs)/dcgain(gred)
step(gs,gred)
legend('sistema original','sistema
reducido')

Con la discusión precedente podemos ver que, sin
considerar la respuesta debida a los ceros, para
sistemas en los cuales existen polos dominantes, es
posible hacer una aproximación por el sistema
equivalente con solo los polos dominantes.
•Si hay un polo dominante de primer orden
aproximamos al sistema por un sistema de primer
orden
•Si hay un par de polos complejos conjugados
dominantes aproximamos el sistema por uno de
segundo orden.

•La aproximación no es buena si no se cumple el
criterio de dominancia de polos.
•La aproximación no es buena si existen ceros
cercanos a los polos dominantes en la función de
transferencia del sistema.
•El poder aproximar un sistema por sus polos
dominantes hace que una gran cantidad de
sistemas se puedan caracterizar como si fueran
de primer o segundo orden.

Sistema de primer orden
/( ) (1 )
4
2.3
0
t
ee
s
r
y t y e
T
T
SP
( )y t
: tiempo de establecimiento.sT
( )eey t
( )r t0.02ee eey y
0.02ee eey y
t: tiempo de subidarT
0.9 ( )eey t
( )1
ee
KT s
s
y K

Sistema de segundo orden
2
2 2
2
21,2
( )2
: frecuencia natural del sistema
: relación de amortiguamiento
G(s) tiene polos en:
1, 1
s 1 , 1
n
n n
n
n n
n n
G ss s
j

Si asumimos
1
1,2
2
1,2
2
G(s) tiene polos en:
s
s 1
1
: factor de amortiguamiento
: frecuencia natural amortiguada
d
n n
n
d n
d
j
j
j

n
d
Ims
Res
Por trigonometría simple
cos
sin d
n
Estas relaciones geométricas permiten establecer el
comportamiento de un sistema de segundo orden

( ) 1 sin( )tnd
d
y t e t
La respuesta al paso del sistema esta dada por
A continuación enumeramos, sin demostración
algunos resultados de la respuesta transitoria
en un sistema de segundo orden:
21, 1
0, 1
SP e
SP
4.5sT

22.23 0.036 1.54,válida para <1r
n
T
Esta última ecuación nos muestra que para
disminuir es necesario aumentar (la
distancia de los polos al origen ) o hacer más
pequeño.
n
***
rT
Además de la fórmula para el tiempo de subida
obtenida por simulación exhaustiva y
aproximación polinomial
***LB

Constante de tiempo de un sistema
Si se tiene un sistema de mayor que de segundo
orden y suponemos que su respuesta está en su
mayoría determinada por los polos de la función
de transferencia, definimos la constante de tiempo
del sistema como
1
min Re(polos de G)sistema

Región de diseño
Con base en las fórmulas de respuesta
transitoria enunciadas anteriormente es
posible encontrar una región de diseño del
plano complejo, en la cual se pueden ubicar
los polos de un sistema de segundo orden
para que satisfagan simultáneamente
condiciones de sobrepico y de Tiempo de
establecimiento y en ocasiones de Tiempo de
subida.

Sabiendo que:
max
Supongamos que en un sistema determinado se tolera
a lo sumo un sobrepico de SP .
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Coeficiente de amortiguamiento
Sobre
pic
o
SP
Región de sobrepico
max
min
Como esta función es decreciente
SP SP ,se producirá cuando tome
valores iguales o mayores que
cierto valor de notado como
21, 1SP e

De esta manera, invirtiendo la fórmula del
sobrepico y teniendo que el sobrepico es
decreciente con relación a
max
min 2 2
max
ln( )
ln ( )
SP
SP
Cualquier valor de que satisfaga esto producirá un
sobrepico menor a , ahora relacionaremos esto
Con el ángulo de los polos. maxSP

Recordando que
cos y como
0 10 20 30 40 50 60 70 80 900
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
cos( ) min max
La función cos( ) es decreciente
en el intervalo 0-90º. Entonces el
se cumplirá para algún
max
min 2 2
max
ln( )
ln ( )
SP
SP
1
max mincos ( )
De manera que

21, 1
0, 1
cos
SP e
SP
4.5sT
Las fórmulas de análisis y diseño
ANÁLISIS
min
max
4.5
sT
DISEÑO
max
min 2 2
max
1
max min
ln( )
ln ( )
cos
SP
SP
Dan un estimado de los parámetros de
respuesta transitoria en un sistema de
segundo orden Ts,Tr,SP
22.23 0.036 1.54,válida para <1r
n
T2
min minmin
max
r n
r
2.23 0.036 1.54
T distancia al origen de polos
T
n
rT
Dan una región de diseño donde se
cumplirán parámetros máximos
especificados

Ejemplo
Determinar la región de diseño donde se
cumplirán:max
max
max
4%
18
=2s
s
r
SP
T s
T
min min
max
4.5 4.50.25
18sT
max
min 2 2 2 2
max
1 1
max min
ln( ) ln(0.04)0.715
ln ( ) ln (0.04)
cos cos 0.715 44.3º
SP
SP

n
0.25
44º
Ims
Res0.25
Linea de 18sT
Región de diseño: cualquier
ubicación de polos adentro
satisfará las condiciones
Región de mínimo Tr
Región de diseño del ejemplo
0.25
distancia al origen de los polosr n
r
T
T

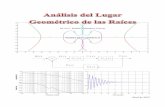
Métodos clásicos de diseño de Controladores
Método del Lugar de las raíces
Una de las técnicas mas referenciadas en los
libros de texto control, es el método del lugar de
las raíces o método de EVANS (1948). En este
método se usa el gráfico del lugar de las raíces y
lo estudiado sobre la región de diseño en
sistemas de segundo orden, para sintetizar
controladores.

Ventajas del lugar de las raíces
•Se tiene información aproximada del
desempeño transitorio del sistema.
•Es intuitivo, directo y sirve como primera
aproximación a una gran cantidad de problemas.
•Da una idea de la estabilidad del sistema en
lazo cerrado.

Desventajas del lugar de las raíces
•No se visualiza el desempeño estacionario de
un sistema
•Se trabaja con la aproximación de sistemas de
segundo orden, la no existencia de polos
dominantes de segundo orden y de otra parte,
los ceros, harán que esta aproximación no sea
del todo válida.
•Da una idea muy vaga de la estabilidad robusta
del sistema en lazo cerrado.

Un ejemplo introductorio
Consideremos el sistema:
1( )
( 4)G s
s s
El cual representa la función de transferencia de
un motor al cual se le pretende controlar la
posición angular.

Los requerimientos exigen diseñar un controlador
que satisfaga las siguientes especificaciones:
0 (ya se cumple )
5%
4.5
lo más rápido posible
p
s
r
e
SP
T s
T
+-
R yk1
( 4)s s
GC
El controlador más simple que se puede hacer es
de tipo proporcional

Para este sistema:
2( )
4
kT s
s s k 2( ) ( ) ( )
4
kL s C s G s
s s
Las raíces de este polinomio estarán en:
1 2, 2 4s s k
0 0, 4
3 1, 3
4 2, 2
5 2
8 2 2 el mejor
13 3 3
s rk polos SP T T
j
j
j
Demos algunos valores a k y calculemos los polos
de T

min min
max
4.5 4.51
4.5sT
max
min 2 2 2 2
max
1 1
max min
ln( ) ln(0.05)0.71
ln ( ) ln (0.05)
cos cos 0.71 45º
SP
SP
n
1
45º
Ims
Res1
Linea de 4.5sT s
23
0k0k3k4k
4
3k
5k
5k
8k
8k
13k
13k
El grafico muestra la región de diseño y los polos
de lazo cerrado del sistema
Polos de G(s)

La tabla y el gráfico anterior nos llevan a la
conclusión de que el mejor valor es k=8
Un problema de este tipo se puede resolver como
en el caso anterior por ensayo y error sobre
diferentes valores de k. Sin embargo en un
intento de hacer esto más sistemático se usa la
técnica del lugar de las raíces.
Lugar de las raíces: gráfico que se forma al
variar el parámetro k para valores positivos.
0 k

+-
R yk ( )G s
Propiedades del lugar de las raíces
( )( )
1 ( )
( )Con L( )
( )
( )( )
( ) ( )
L
L
L
L L
kL sT s
kL s
N ss
D s
kN sT s
D s kN s
Los polos de T(s) estarán en:
( ) ( ) 0L LD s kN s

Rescribiendo la ecuación anterior:
1( )L s
k
Tomando ángulo y magnitud en la última ecuación
se obtienen las importantes:
1(1) ( ) , la condición de magnitud
(2) ( ) 180º 360º, ,la condición de ángulo
L sk
L s L L
Estas propiedades tienen una interpretación
geométrica que permite hacer cálculos gráficos
importantes, como ilustraremos a continuación

Sea
( )( )
( )( )( )
q s aL s
s b s c s d
0Supongamos que s ,es un punto en el lugar de las raíces
Además podemos representar cada cero y cada polo
en su forma compleja
1
2
3
0 0
0 0
0 0
0 0
( )
( )
( )
( )
j
j
j
j
s a s a e
s b s b e
s c s c e
s c s d e

De manera que:
00
0 0 0
( )( )
( )( )( )
q s aL s
s b s c s d
1 2 3
0
0 ( )
0 0 0
( )
j
j
q s a eL s
s b s c s d e
En notación compleja:
Usando las condiciones de magnitud y ángulo
0
0
0 0 0
1( )
q s aL s
s b s c s d k
0 1 2 3
1 2 3
( ) ( )
( ) 180º 360
L s
L

El grafico muestra la región de diseño y los polos
de lazo cerrado del sistemaIms
Res
0slugar de las raíces
a b c d
1 3 3
0s a
0s c0s b 0s d
1 2 3( ) 180º 360L
0
0
0 0 0
1( )
q s aL s
s b s c s d k

Invirtiendo la condición de magnitud se puede
obtener la fórmula que permite determinar
gráficamente el valor de la ganancia a partir del
lugar de las raíces
0
0 0 0
0
1
( )k
L s
s b s c s dk
q s a
Solo debemos medir las distancias a los polos y a los
ceros y podemos estimar k, esto es lo que queremos
en diseño de controladores
¿Cómo calculo k gráficamente?

Construcción del Lugar de las Raíces
Realmente el lugar de las raíces de un sistema se
obtiene hoy en día usando métodos
computacionales, si por ejemplo usamos
MATLAB es fácil obtener el lugar de las raíces
de un sistema usando el comando RLOCUS.
Ejemplo lugar de las raíces
de:1
( )( 4)
G ss s
g=tf(1,[1 4 0])
rlocus(g)
-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Root Locus
Real Axis
Imag
inar
y A
xis

Sin embargo estudiaremos algunas de las reglas
básicas de construcción que nos pueden ayudar
conceptualmente en el diseño de sistemas usando
el lugar de las raíces, aunque para propósitos
prácticos, estos lugares se realizarán con la ayuda
de computador.
Cabe anotar que ahora existen herramientas muy
poderosas de análisis y diseño de sistemas como
el SISOTOOL con el cual se pueden abordar
muchos de los problemas de control fácilmente.

Reglas básicas de Construcción del Lugar de las Raíces
Sean
número de ceros de ( )
número de polos de ( )
m L s
n L s
Regla 0
¿Cómo es el lugar de las raíces?
El lugar de las raíces en un gráfico simétrico
respecto del eje real (pues los polos son reales o
complejos conjugados) con n ramas, cada una
correspondiente a la evolución de cada polo con
el cambio del parámetro k

Regla 1
¿donde comienza el lugar?
El lugar de las raíces de un sistema siempre comienza
en los polos de L(s).
Puesto que
( ) ( ) 0
Si k 0, se tiene
( ) 0, los polos de ( )
L L
L
D
L s
s kN s
D s

Esto puesto que:
( ) ( ) 0
1( ) ( ) 0
Cuando k , en la ecuación anterior queda
N(s)=0, es decir los ceros d ( ) e
L L
L L
D s kN s
D s N
L
sk
s
Regla 2
¿donde termina el L.R?
El lugar de las raíces de un sistema puede
terminar para valores grandes de k en:
• Los ceros de L(s)

Regla 2
¿donde termina el L.R?
•También puede terminar en asíntotas, (ver
regla 4)
De manera general
ramas terminan en los ceros
ramas termina en asínto a- t s
m
n mk

Regla 3
¿Qué puntos del eje real están en el L.R?
Un punto en el eje real está en el lugar de las
raíces si el numero total de polos y ceros a su
derecha es impar
Ims
Res
Ims
Res

Regla 4
¿Cómo se encuentran las asíntotas del LR?
Para k ,como deciamos el lugar de las raíces
tiende a asíntotas.
Estas tienen un centroide en:
Respecto del cual forman ángulos
(2 1) 180, 0,1,2,.. 1
polos ceros
CEn m
LAs L n m
n m

Regla 5
¿Cómo se encuentran los puntos de ruptura?
Los puntos de ruptura son sitios donde las ramas
del lugar de las raíces se abren saliendo del eje
real ó donde las ramas se juntan, entrando hacia él
Ims
Res
Ims
Res
punto de ruptura entrando punto de ruptura saliendo

Para encontrar los puntos de ruptura en el lugar de
Las raíces, calculamos donde:
( ) '( ) '( ) ( ) 0
( ) 0
( )0
( )
L L
L
L
L L
dL s
ds
d N s
ds D
D s
s
N s N s D s

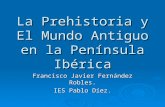
Ejemplo 2
Hagamos un bosquejo rápido del lugar de las
raíces para el sistema:
4( )
( 2)
sG s
s s
Usando las reglas anteriormente citadas.

R0-R1-R2:En primera instancia trazamos los
polos y ceros de G(s) en los cuales comienza el
lugar de las raíces. También sabemos que una
rama irá al cero y otra ira a una asíntota
Ims
Res
Ejemplo 2

R3: Trazamos ahora el lugar sobre el eje real
Ims
Res
Ejemplo 2

R4: calculamos las asíntotas que en este caso no son sino n-m=2-1=1
0 1 ( 4)5
1
(2 1) 180180, 1
polos cerosCE
n m
LAs L
n m
Ims
Res
Ejemplo 2
CE

Ims
Res
Ejemplo 2
R5: calculamos ahora los puntos de ruptura
2
2
'( ) ( ) '( ) ( ) 0
(2 2)( 4) (1)( 2 )
8 8 0
: 0.89, 8.89
D s N s N s D s
s s s s
s s
Soluciones
2j
2j

Diseño con el lugar de las raíces
Seguimos estos pasos:
1. Seleccionar una configuración del controlador, con una ganancia
variable k.
2. Encontrar el rango de valores de ganancia que garantizan
la estabilidad.
3. Escoger el valor de ganancia mínima k que garantiza el
cumplimiento de la especificación estática. Si , es
necesario seleccionar otro tipo de controlador (volver al paso 1).
4. Traducir las especificaciones dinámicas SP y Ts en una región de
diseño, donde deben estar los polos.
min max,k k
min max,k k k

Seguimos los pasos (continuación)
5. Construir el lugar geométrico para L(s), indicando la región de
diseño y determinar los valores de la ganancia que garantizan que
TODOS los polos están en RD (región de diseño). Si no hay
valores de ganancia que satisfagan esto, volver a 1.
6. Escoger un valor de ganancia, que satisfaga todas las condiciones
anteriores, de modo que permita satisfacer otras condiciones como
Tr, etc.
7. Simular la respuesta del sistema de lazo cerrado con el
controlador diseñado, para garantizar que efectivamente se cumplen
todas las especificaciones.
Tomado del libro del profesor Hernando Díaz

Con base lo anterior ejemplo diseñe un controlador
proporcional para la planta:
Que cumpla los siguientes requerimientos:
10%
20%
0.9
v
s
e
SP
T s
4( )
( 2)
sG s
s s

+-
R yk4
( 2)
s
s s
GC
2
4( )
( 2) 4
La estabilidad del sistema se logra cuando k>2
Para el error de velocidad:
2 20.1
4 4
5
v
ks kT s
s k s k
k ke
k k
k

La región de diseño tendrá las fronteras:
min min
max
4.5 4.55
0.9sT
max
min 2 2 2 2
max
1 1
max min
ln( ) ln(0.2)0.45
ln ( ) ln (0.2)
cos cos 0.45 62.8
SP
SP
El lugar de las raíces ya lo habíamos obtenido antes,
trazamos sobre este la región de diseño

-10 -8 -6 -4 -2 0 2-5
-4
-3
-2
-1
0
1
2
3
4
5Root Locus
5
62º.8
1 25 4.79 , 4. 9
12
5 7
k
p j p j
1 2
20,
8, 10
k
p p
Los valores de k mostrados producen polos en la
región de diseño, que además cumplen con el error.

Para calcular las ganancias podemos usar dos métodos
En MATLAB.
G=tf([1 4],[1 -2 0])%funcion del sistema
rlocus(G)
[k,polos]=rlocfind(G)
O alternativamente:
rltool(G)
sisotool(G); el cual abre el editor del
lugar de las raíces.
Es claro que del gráfico de las raíces podemos obtener
directamente la ganancia mirando la ubicación de los
polos y usando la condición de magnitud.

Por ejemplo en donde el polo es:
5 4.79
1 112
5 4.79 4( 5 4.79 )
5 4.79 5 4.79 2
s j
kjG j
j j
y donde el polo es -8
1 120
8 4(-8)
8 8 2
kG

0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
1.2
1.4
k=12k=20
Step Response
Time (sec)
Am
plit
ude
Simulamos la respuesta del sistema y obtenemos lo
siguiente:
1 2
12 s + 48 T 12
s +10s+ 48
polos en lazo cerrado en:
-5.0000 4.7958i,
k
2 2
20 s + 80 T 20
s +18s+80
polos de lazo cerrado en
-10,-8
k
MATLAB
G=tf([1 4],[1 -2 0])%funcion del
sistema
k1=12;k2=20
T1=feedback(G*k1,1);
T2=feedback(G*k2,1);
step(T1,T2)
legend('k=12','k=20')
Claramente el mejor valor
Es k=20

1( )
( 4)G s
s s
Efecto de polos y ceros en el lugar de las raíces
Coloquemos el sistema del ejemplo inicial
Agreguemos un cero y después un polo al sistema
y miremos su efecto en el lugar de las raices
1 2
1( ) ; ( )
( 4) ( 4)
5
( 5)G s G s
s s
s
ss s

-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Real Axis
Imag A
xis
Root Locus Editor (C)
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Imag A
xis
Real Axis
Root Locus Editor (C)
-12 -10 -8 -6 -4 -2 0 2 4-8
-6
-4
-2
0
2
4
6
8
Real Axis
Imag A
xis
Root Locus Editor (C)
El lugar de las raíces original
del sistema
El polo lleva el lugar de las raíces
hacia la derecha, su efecto es
desestabilizante.
El cero “atrae” el lugar de las raíces
hacia la izquierda, su efecto es
estabilizante.

Otros diseños con lugar de las raíces
Supongamos que tenemos el sistema
5( )
( 1)( 4)G s
s s s
Supongamos adicionalmente que queremos lograr
Los siguientes objetivos:
5%
3
lo más rápido
s
r
SP
T s
T

+-
R yk2
( 1)( 4)s s s
GC
La función de transferencia es
2k( )
s³+5s²+4s+2kT s
0
y la región de diseño tiene fronteras en
45
1.5
pe

-4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Root Locus
Real Axis
Imagin
ary
Axis
10k
La estabilidad del sistema requiere k=10,
adicionalmente es imposible lograr que el tiempo
de establecimiento sea el adecuado.

En un caso como este es necesario insertar un cero en
la función de transferencia del lazo.
+-
R y( )zk s z 2
( 1)( 4)s s s
GC
El efecto de introducir un cero estable siempre será
el de atraer el lugar de las raíces del sistema hacia
la izquierda. Esto es un efecto de la condición de
ángulo. Esta función del compensador es
impropia y no puede ser realizada fisicamente,
pero iniciemos la discusión, pensando en que se
pudiera insertar un cero “puro”.

El esquema anterior es equivalente a tener un control PD
Proporcional derivativo
pk
+-
R y2
( 1)( 4)s s s
GCdk s
+
( ) p dC s k k s
+-
R y( )zk s z 2
( 1)( 4)s s s
GC
( ) z zC s k z k s
Las dos estructuras son idénticas, e introducir un control
de un “cero puro” es por completo equivalente a un
controlador PD
d z
p z
k k
k k z

Miremos el efecto con varios valores del cero, en el
Lugar de las raíces del sistema.
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0
-6
-4
-2
0
2
4
6
8Root Locus
Real Axis
Imagin
ary
Axi
s
10z
-5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-10
-8
-6
-4
-2
0
2
4
6
8
10Root Locus
Real Axis
Imagin
ary
Axis
5z
-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-10
-8
-6
-4
-2
0
2
4
6
8
10Root Locus
Real Axis
Imagin
ary
Axis 3z
-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-10
-8
-6
-4
-2
0
2
4
6
8
10Root Locus
Real Axis
Imagin
ary
Axis
1.5z
(a)
(d)(c)
(b)

En el grafico anterior se muestra la progresión del
lugar de las raíces. Conforme el cero se va llevando
hacia el origen su efecto se va haciendo más
pronunciado. En la figura (d) con z=1.5, casi hemos
logrado nuestro objetivo. Tomemos z=1.1 y
lograremos todo.
En este último
hemos logrado
tener todos los
polos en la región
de diseño con 2.3zk
-2 -1.5 -1 -0.5 0
-6
-4
-2
0
2
4
6
Real Axis
Imag A
xis
Root Locus Editor (C)

Según esto hemos diseñado un compensador PD, con
parámetros:2.3
1.1 2.3 2.53
d z
p z
k k
k k z
Sin embargo recordemos que no podemos
implementar funciones de transferencia impropias y
que en realidad el compensador proporcional tiene
la forma propia:
pk
+-
R y2
( 1)( 3)s s s
GCdk s
+1
d
d
k s
ks
N
En realidad

Donde N determina el ancho de banda efectivo del
derivador, como ya habíamos visto
11
d d
d d
k s k s
k ss
N
Sea la función de transferencia del derivador real:
De manera que un controlador PD real tendrá como
función de transferencia:
( )1 1
p d p ddp
d d
k s k kkC s k
s s

Que con las definiciones:
1, ,
p d
p
p d d
k kK k z p
k
( )( )
s zC s K
s p
Lo podemos escribir como
En realidad esta última es una red de adelanto, en
la cual ya no tenemos el problema de las funciones
de transferencia impropias.
Una red de adelanto es un sistema conformado por
un polo y un cero en el semiplano izquierdo. La
característica central en el plano complejo, es que
el cero esta más cerca del origen que el polo.
Ims
Res

En una red de adelanto lo que predomina es el
comportamiento del cero, de hecho es una
aproximación para un cero “puro”, su efecto
tiende a ser estabilizante y mejorar el tiempo de
respuesta de un sistema. Aunque si el cero es
muy cercano al origen produce efectos de
sobrepico

Para el diseño hacemos lo siguiente:
Ubicamos únicamente el cero, como hicimos en el
ejemplo hasta, si es posible, lograr “encajar” el
lugar de las raíces dentro de la región de diseño.
Seguidamente, colocamos un polo a una distancia
considerable del cero para que su efecto no sea
ostensible
Suele ser un criterio de diseño inicial
10p z
Pero hay que ajustarlo con iteraciones del rlocus:

Ejemplo
Encuentre un valor de p para que el efecto del cero
no sea ostensible en la respuesta del sistema para el
ejemplo anterior. Con base en esto encuentre todos
los parámetros del compensador PD

-2 -1.5 -1 -0.5 0
-6
-4
-2
0
2
4
6
Real Axis
Ima
g A
xis
Root Locus Editor (C)
10
11
p z
p20p
Como vemos para p=11, criterio inicial el polo
aún tiene un efecto marcado, con p=20, este
efecto desaparece. Finalmente con k=42.5 todos
los objetivos se cumplen.
-2 -1.5 -1 -0.5 0
-6
-4
-2
0
2
4
6
Real Axis
Ima
g A
xis
Root Locus Editor (C)
42.5k

1.1( ) 42.5
20
sC s
s
Y ahora hacemos la simulación en el tiempo de este
sistema junto con el que tenia el controlador impropio
con solo el cero para comparar.
Como vemos son bastante similares, los objetivos
se cumplieron totalmente.
0 0.5 1 1.5 2 2.5 3 3.50
0.2
0.4
0.6
0.8
1
1.2
1.4
compensador impropiocompensador propio
Step Response
Time (sec)
Am
plit
ude
MATLAB CODE
gs=zpk([],[0 -1 -4],2)
z=1.1
kz=2.3
c1=kz*tf([1 z],1)
L1=gs*c1
T1=feedback(L1,1)
z=-1.1
p=-20
k=42.5
c2=zpk(z,p,k)
L2=gs*c2
T2=feedback(L2,1)
step(T1,'r',T2,'g')
legend('compensador impropio','compensador propio')

Redes de atraso
Con la misma estructura que vimos anteriormente y
si hacemos que el polo este más cerca al origen que
el cero
( )( )
s zC s K
s p
Ims
Res
Tendremos un compensador de atraso, la característica
primordial por la que se usa este compensador, es porque
permite reducir el error estacionario en entradas de tipo
paso y rampa, como revisaremos.

+-
R y( )s zK
s p
2
( 1)( 3)s s s
G
Recordemos que:
1
1
(0) (0) (0) (0)
p
p
p
eK
KzK L C G G
p
Si, por ejemplo, G(0) es finito, Kp se verá
aumentada en el factor Kz/p. Si hacemos que la
relación polo cero sea grande lograremos
reducir el error de posición
pK
/Kz p

De manera similar para la constante de error
De velocidad:
1
(0) (0) (0)
v
v
v
eK
K sL sC G
Supongamos que G contenga un integrador, de lo
contrario no tendría error finito
1
1
(0) (0)[ (0)]
Donde hemos cancelado s con el polo de G
(0)
v
v
K L C G
KzK G
p
vSi z>>p K 0ve

Puede haber un caso particular, donde se combinen
Los dos efectos, que es una red de adelanto-atraso
1 2
1 2
( ) ( )( )
s z s zC s k
s p s p
Ims
Res
Adelanto Atraso
El controlador combinará los efectos deseables de
cada red.

Caso particular: el control PI
Un caso muy usual que ya hemos revisado es el
de control PI. El control PI se incluye para
eliminar el error de estado estacionario.
pk
+-
R y2
( 1)( 3)s s s
Gik
s
+
( )
( )
ip
p i
kC s k
s
k s kC s
s
+-
R y( )s zK
s
2
( 1)( 3)s s s
GC
( )Ks Kz
C ss
p
i
k K
k kz

Entonces, un control PI no es otra cosa que un tipo
de red de atraso. Desplazar el cero más hacia la el
eje imaginario, tiene un efecto estabilizante, pero
tiende a aumentar el sobrepico SP y el tiempo de
respuesta
Ejemplo:
Se tiene el sistema
3 2
0.2( )
s +2.05s +1.25s+ 0.2G s
sT

p
Se quiere un sistema de control que satisfaga
e 1%
10%
20s
SP
T s
0 0p
0
Suponiendo un control proporcional
4k T(s)=
20s³+41s²+25s+4k+4
De aqui que
4 e 0.05
4 4k
+-
R yk0.2
( 1)( 0.8)(0 0.25)s s
GC

3.96 k 99
0.04
Cuyo lugar de las raíces es:
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4
-1
-0.5
0
0.5
1Im
ag A
xis
Real Axis
Root Locus Editor (C)
12.2k
Para valores de k mayores a 12.2 el sistema se torna
Inestable, de aquí que sea imposible lograr el error de
posición.

Intentaremos con un control PI
Hacemos inicialmente
1z
Logramos 0 error estacionario y estabilidad pero aun
no se logran las otras especificaciones.
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4
-1
-0.5
0
0.5
1
Real Axis
Ima
g A
xis
Root Locus Editor (C)

Podemos hacer una cancelación polo cero estable del
polo en -0.25 puesto que este se encuentra en la región
de diseño.
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4
-1
-0.5
0
0.5
1
Real Axis
Ima
g A
xis
Root Locus Editor (C)
0.9k
Con lo cual hemos ubicado todos los polos en la
Región de diseño
( 0.25)( ) 0.9
sC s
s

Ahora presentamos la respuesta al paso del
sistema donde verificamos que se cumplieron
todos los objetivos del diseño.Step Response
Time (sec)
Am
plit
ude
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
System: Closed Loop: r to y I/O: r to y
Peak amplitude: 1.05 Overshoot (%): 4.91
At time (sec): 12.5
System: Closed Loop: r to y I/O: r to y Settling Time (sec): 16.9

Usando el siguiente código en MATLAB podemos
revisar el error a estado estacionario que como se
espera es nulo. Sin embargo, miremos también
cual es el error a la rampa.
gs=zpk([],[-1 -0.8 -0.25],0.2)
c=zpk([-0.25],[0],0.9)
T=feedback(c*gs,1)
S=1-T; %calculamos la sensibilidad
ep=dcgain(S)%
Una vez corrido este código arroja un valor como,
2.1867e-015, que es un cero en calculo numérico del
computador.

Para calcular el error de velocidad hacemos lo
siguiente:
integrador=tf(1,[1 0])%definimos un integrador
respuesta=minreal(integrador*S)
ev=dcgain(respuesta)&
%miremos la simulacion a la rampa con error finito
step(integrador*T,integrador)
vEl e nos da 440% y ahora miramos la simulación
ante una entrada rampa
0 5 10 15 20 25 30 35 400
5
10
15
20
25
30
35
40
salidareferencia
Step Response
Time (sec)
Am
plit
ude

Controladores PID en el lugar de las raíces
La función de transferencia de un controlador PID con
derivador ideal esta dada por:
( ) ip d
kC s k k s
s
Recordamos que derivadores ideales no pueden existir
por lo cual
d( ) , donde 1
i d dp
d
k k s kC s k
s s N

Esto nos conduce a:
2( 1) ( 1)( )
( 1)
p d i d d
d
k s s k s k sC s
s s
Definamos
1d
d
p
2( 1) ( 1)
( )
( 1)
p i d
d d
d
s sk s k k s
p pC s
ss
p
De aquí que
Controladores PID en el lugar de las raíces

Expandiendo esta expresión y factorizando
términos semejantes obtenemos la función del PID
propio, el cual si puede realizarse.
2( ) ( )( )
( )
p d d p d i i d
d
k k p s k p k s k pC s
s s p
Este lo podemos reescribir de la forma:
2
( )( )d
as bs cC s
s s p
Controladores PID en el lugar de las raíces

Donde tomamos las definiciones:
i d
p d i
p d d
c k p
b k p k
a k k p
Que nos permiten despejar las constantes del PID
Para su diseño:
;
i
d
ip d d
d
p
d
d
ck
p
b kk N k p
p
a kk
p

Con la expresión anterior como:
2
1 2( )( )( )
( ) ( )d d
as bs c K s z s zC s
s s p s s p
Entonces el PID no es otra cosa que un
controlador de segundo orden con un polo en el
origen y otro polo estable lejano que aparece
como consecuencia de la implementación real del
derivador. Adicionalmente, el controlador PID
tiene dos ceros ( ), los cuales pueden ser
reales o complejos.1 2 y z z
Controladores PID en el lugar de las raíces

Ims
Res
Ims
Res
ceros reales ceros complejos
polo en 0 polo en 0
polo en - dp polo en - dp
Podemos diseñar un PID en el lugar de las raíces si
ubicamos polos y ceros con estas distribuciones. El
caso de usar ceros complejos es más usual pues en
muchos casos produce una mejor respuesta.
Controladores PID en el lugar de las raíces

•Adicionalmente podemos notar que, en el caso de
ceros reales, el PID no es sino un caso de una red de
adelanto-atraso.
•Los ceros complejos sea usan para neutralizar el
efecto de vibración, en sistemas mecánicos por
ejemplo, que tienen polos con componentes
imaginarios elevados.
Ims
Res
Ims
Res
ceros reales ceros complejos
polo en 0 polo en 0
polo en - dp polo en - dp

Controladores PID en el lugar de las raíces
Pasos de diseño
1. Se hace el lugar de las raíces y la región de
diseño de G(s). Se añaden el polo en s=0 y los
ceros. Iterativamente los ceros se van acercando
al origen hasta lograr que el lugar de las raíces
pueda ubicarse en la región de diseño.
2. Se ajusta la ganancia para ubicar todos los polos
en la región de diseño
3. Se coloca el polo lejano del derivador, eligiendo
primero un valor alto y disminuyendolo
progresivamente hasta que su efecto no se vea en
la respuesta transitoria del sistema

Controladores PID en el lugar de las raíces
Ejemplo
Se tiene el sistema con función de transferencia
100000( )
( 100) ( 20) ( 5) ( 1)G s
s s s s
Diseñar un PID para lograr las siguientes
especificaciones
0
10%
2
p
s
e
SP
T s

Controladores PID en el lugar de las raíces
Ejemplo
-200 -150 -100 -50 0 50 100 150-200
-150
-100
-50
0
50
100
150
200
Vista del lugar del sistema original G(s) Vista del sistema con el polo en cero
-200 -150 -100 -50 0 50 100-150
-100
-50
0
50
100
150
Dibujamos el lugar de las raices y agregamos el
polo en cero.

La inserción del polo en s=0 del integrador, ha
producido un efecto desestabilizante como
esperábamos, pero debemos recordar que el erro
de posición sera nulo.
Para eliminar el efecto desestabilizante del
integraodor ahora debemos colocar el efecto
estabilizante de los dos ceros del PID.
Controladores PID en el lugar de las raíces
Ejemplo

-10 -8 -6 -4 -2 0
-15
-10
-5
0
5
10
-10 -8 -6 -4 -2 0
-15
-10
-5
0
5
10
-10 -8 -6 -4 -2 0
-15
-10
-5
0
5
10
Controladores PID en el lugar de las raíces
A medida que acercamos los
ceros al origen el lugar va
penetrando a la región de
diseño, hasta que lo logramos
con z1=6 y con z2=2.
1 6z 2 2z1 6z 2 2z

-10 -8 -6 -4 -2 0
-15
-10
-5
0
5
10
Con estos valor hemos logrado que el lugar de
las raíces quede en la región de diseño y los
polos de lazo cerrado puedan estar dentro de ella.

Por último elegimos un polo lejano que no
cambie demasiado el lugar de las raíces ya
encontrado, ni la respuesta transitoria
-10 -8 -6 -4 -2 0
-15
-10
-5
0
5
10
Step Response
Time (sec)
Am
plit
ude
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
1.2
1.4
System: Closed Loop: r to y I/O: r to y
Peak amplitude: 1.08 Overshoot (%): 7.96
At time (sec): 1.01
System: Closed Loop: r to y I/O: r to y
Settling Time (sec): 1.92
Sin polo lejano Respuesta transitoria
-10 -8 -6 -4 -2 0
-15
-10
-5
0
5
10
Real Axis
Imag A
xis
Root Locus Editor (C)
Con polo en p=-40
Step Response
Time (sec)
Am
plit
ude
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
1.2
1.4
System: Closed Loop: r to y I/O: r to y
Settling Time (sec): 1.96
System: Closed Loop: r to y I/O: r to y
Peak amplitude: 1.09 Overshoot (%): 9.4
At time (sec): 1
Respuesta transitoria
k=0.48

Para todo esto se ha usado la herramienta SISOTOOL
de MATLAB. Podemos exportar al espacio de trabajo
de MATLAB el controlador C obtenido y usar las
formulas obtenidas anteriormente para encontrar el
PID equivalente.
File=>export=>export to workspace (C debe
estar seleccionado)
El compensador obtenido es:
2.1763 (s+5.455) (s+1.633)( )
s (s+40)C s

Lo convertimos a función de transferencia
C=tf(C)
2
2
2.176 s +15.43s+19.39( )
s +40 sC s
Y recordamos las fórmulas:
;
i
d
ip d d
d
p
d
d
ck
p
b kk N k p
p
a kk
p

Que calculamos directamente con este código
%MATLAB CODE
T=feedback(C*G,1)
step(T)%simulamos para verificar
[num,den]=tfdata(C,'v')%retornamos en forma de vectores el
numerador y el denominador
a=num(1)%tomamos cada constante del numerador
b=num(2)
c=num(3)
pd=den(2)
ki=c/pd
kp=(b-ki)/pd
kd=(a-kp)/pd
N=pd*kd

De donde:
0.4847
0.3735
0.0451
1.8028
i
p
d
k
k
k
N
Para probar que hicimos las cosas bien simulamos en
Simulink con el PID aproximado y estas constantes.

Con lo cual confirmamos que nuestro PID,
Quedó bien diseñado.
salida
To Workspace
Sum1
Step Scope
kp
Proportional
G
LTI System
ki
s
Integral
kd.s
kd/N.s+1
Derivative
0 0.5 1 1.5 2 2.5 3 3.5-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Simulación del PID