Lugar geometrico de las raices m.p
17
-
Upload
nadhezka-palma-de-millan -
Category
Education
-
view
4.630 -
download
1
description
LGR
Transcript of Lugar geometrico de las raices m.p


REPÚBLICA BOLIVARIANA DE VENEZUELA INSTITUTO UNIVERSITARIO POLITÉCNICO
“SANTIAGO MARIÑO” ESCUELA DE INGENIERÍA ELECTRÓNICA
EXTENSIÓN MATURÍN
LUGAR GEOMÉTRICO DE LAS RAICES
Profesor: Realizado por:
Ing. Mariangela Pollonais Br. Palma, Marielys C.I.19.692.699
Maturín, Agosto de 2013

DEFINICION DE LUGAR GEOMETRICO DE LAS RAICES (LGR)
Existe una estrecha relación entre la respuesta transitoria de un sistema y la
ubicación de las raíces de su ecuación característica en el Plano s. Conocer la ubicación
de las raíces en el Plano s ante variaciones de un parámetro, puede representar una
herramienta muy útil de análisis y diseño, ya que la variación de los parámetros físicos
de un sistema que logran una modificación de su ecuación característica, modifica las
raíces o polos de dicho sistema, de forma tal que se puede obtener una respuesta
particular o deseada.
Supongamos tener el sistema de la siguiente figura, donde KA es la ganancia de
nuestro controlador, el cual puede ser elegido por el diseñador.
Figura 1. Esquema de un sistema controlado con retroalimentación.
La función de transferencia de este sistema es:
Ec. [1]
Los polos de esta función de transferencia estarán dados por las raíces de la ecuación
característica: .

Dependiendo de la ganancia KA que elija el diseñador, será la respuesta dinámica
que tendrá el sistema retroalimentado (la ubicación de los polos depende de esta
ganancia).
Evans propuso que el diseñador del sistema de control construya el lugar
geométrico de todas las raíces posibles de la ecuación a medida
que KA varía desde 0 a infinito. De esta manera podemos elegir adecuadamente la
ganancia KA y ver los efectos de polos y ceros adicionales.
Tenemos que la función de transferencia de la planta es:
Ec. [2]
Donde a(s) y b(s) son polinomios de grado n y m respectivamente, y n m.
Estos polinomios los podemos escribir de las siguientes maneras:
Ec. [3]
Ec. [4]
Llamemos K a: K = KA . Kp.
Entonces la ecuación característica la podemos escribir de las siguientes maneras:
Ec. [5]

Ec. [6]
Ec. [7]
Ec. [8]
Consideraremos primeramente el caso en que K es positivo.
El grado de la ecuación característica es el grado mayor de los dos polinomios a(s)
y b(s) (observando la ecuación 7), y por lo tanto es de grado n. Esto significa que el
número de ramas del lugar geométrico de las raíces estará dado por n el grado del
polinomio denominador de la función de transferencia a lazo abierto.
De la ecuación 7 también podemos decir que para K = 0, las raíces de la ecuación
característica estará dada por los polos de la función de transferencia a lazo abierto
(las raíces de a(s)); y que para K infinito, las raíces de la ecuación característica estará
dada por los ceros de la función de transferencia a lazo abierto (las raíces de b(s)).
Conclusión: existirá n ramas en el lugar geométrico de las raíces que partirán de
los polos a lazo abierto y terminarán en los ceros a lazo abierto.

APLICACIONES DE (LGR)
El lugar de las raíces, además de ser útil para el análisis de la estabilidad de un
sistema lineal y continuo SISO, se puede emplear para el diseño de un controlador de
una variable dentro de un sistema, es decir, se aplica para determinar la función de
transferencia del controlador que además de la regulación haga que la respuesta del
sistema, ante cambios en su variable de proceso, muestre un perfil de acuerdo a
ciertos requerimientos. A continuación se desarrolla un ejemplo de lo anterior
valiéndose de la herramienta “Control System Toolbox” disponible en Matlab.
CARACTERISTICAS DEL (LGR)
La característica básica de la respuesta transitoria de un sistema en lazo
cerrado se relaciona estrechamente con la ubicación de los polos en lazo
cerrado.
Si el sistema tiene una ganancia de lazo variable, la ubicación de los polos en lazo cerrado depende del valor de la ganancia de lazo elegida.
Es importante que el diseñador conozca cómo se mueven los polos en lazo cerrado en el plano s conforme varía la ganancia de lazo.
Desde el punto de vista del diseño, un simple ajuste de la ganancia en algunos sistemas mueve los polos en lazo cerrado a las posiciones deseadas.
Los polos en lazo cerrado son las raíces de la ecuación característica.
W. R. Evans diseñó un método sencillo para encontrar las raíces de la ecuación característica, que se usa ampliamente en la ingeniería de control. Se denomina método del lugar geométrico de las raíces, y en él se grafican las raíces de la ecuación característica para todos los valores de un parámetro del sistema.
La idea básica detrás del método del LGR es que los valores que hacen que la función de transferencia alrededor del lazo sea igual a - 1 deben satisfacer la ecuación característica del sistema.
El método debe su nombre al lugar geométrico de las raíces de la ecuación característica del sistema en lazo cerrado conforme la ganancia varía de cero a infinito.

El método del LGR resulta muy útil, dado que indica la forma en la que deben modificarse los polos y ceros en lazo abierto para que la respuesta cumpla las Especificaciones de desempeño del sistema.
Algunos sistemas de control pueden tener más de un parámetro que deba ajustarse. El diagrama del LGR, para un sistema que tiene parámetros múltiples, se construye variando un parámetro a la vez.
En la mayor parte de los casos, el parámetro del sistema es la ganancia de lazo K, aunque el parámetro puede ser cualquier otra variable del sistema Si el diseñador sigue las reglas generales para construir los lugares geométricos, le resultará sencillo trazar los LGR de un sistema específico.
Debido a que generar los lugares geométricos de las raíces usando MATLAB es muy simple, se podría pensar que trazar los lugares geométricos de las raíces en forma manual es una pérdida de tiempo y esfuerzo.
PASOS PARA DETERMINAR EL LGR
Cuando se trata de sistemas de control es sumamente importante conocer la
ubicación de las raíces de la ecuación característica del lazo cerrado, lo cual puede
conocerse utilizando un método sistemático y sencillo que muestra el movimiento de
dichas raíces cuando se modifica un parámetro de la ecuación. Dicho método permite
elaborar lo que se cono ce como el lugar geométrico de las raíces (LGR), que nos es
otra cosa que las soluciones de la ecuación característica a lazo cerrado cuando se
varía un parámetro
El método de construcción para el lugar geométrico de las raíces de la ecuación
característica a lazo cerrado cuando se varía un parámetro se fundamenta en un
esquema de control de retroalimentación simple como el que se muestra en la
FIGURA. 1.1, para el cual la ecuación característica a lazo cerrado es la que indica la
ECUACION 1.1, cuyas soluciones representan los polos del lazo cerrado

ECUACION 1.1
Para un esquema de realimentación simple como el de l figura 1.1
FIGURA 1.1
El lugar geométrico de las raíces se realiza para variaciones de K desde cero
hasta infinito, para las cuales dichas raíces deben satisfacer la ECUACION 1.1.
Como S es una variable compleja, es posible reescribir dicha ecuación en forma polar
como sigue:
ECUACION 1.2

A partir de allí se pueden identificar dos condiciones que deben cumplirse para
satisfacer la ecuación anterior, las cuales son conocidas como la Condición de Módulo
y la Condición de Ángulo y se muestran en las ECUACIONES. 1.3 y 1.4,
respectivamente
ECUACION 1.3 ECUACION 1.4
Donde k = 0, ±1, ±2,...
Si la función de transferencia a lazo abierto se factoríza en polos y ceros, tal
como se muestra en la ECUACIÓN 1.5, las condiciones de módulo y de ángulo pueden
reescribirse como se muestra en las ECUACIONES. 1.6 y 1.7, respectivamente.
ECUACIÓN 1.5 ECUACIÓN 1.6
ECUACIÓN 1.7
Las dos condiciones anteriores deben cumplirse para cada una de las raíces
que forme parte del lugar geométrico, de forma tal que se garantice que cada una de
ellas sea solución de la ecuación característica a lazo cerrado. Gracias a la condición de
ángulo se determina la ubicación geométrica de las raíces, es decir, la forma del lugar
geométrico, en tanto que la condición de módulo permite determinar el valor de la
ganancia K a lo largo de dicho lugar geométrico.
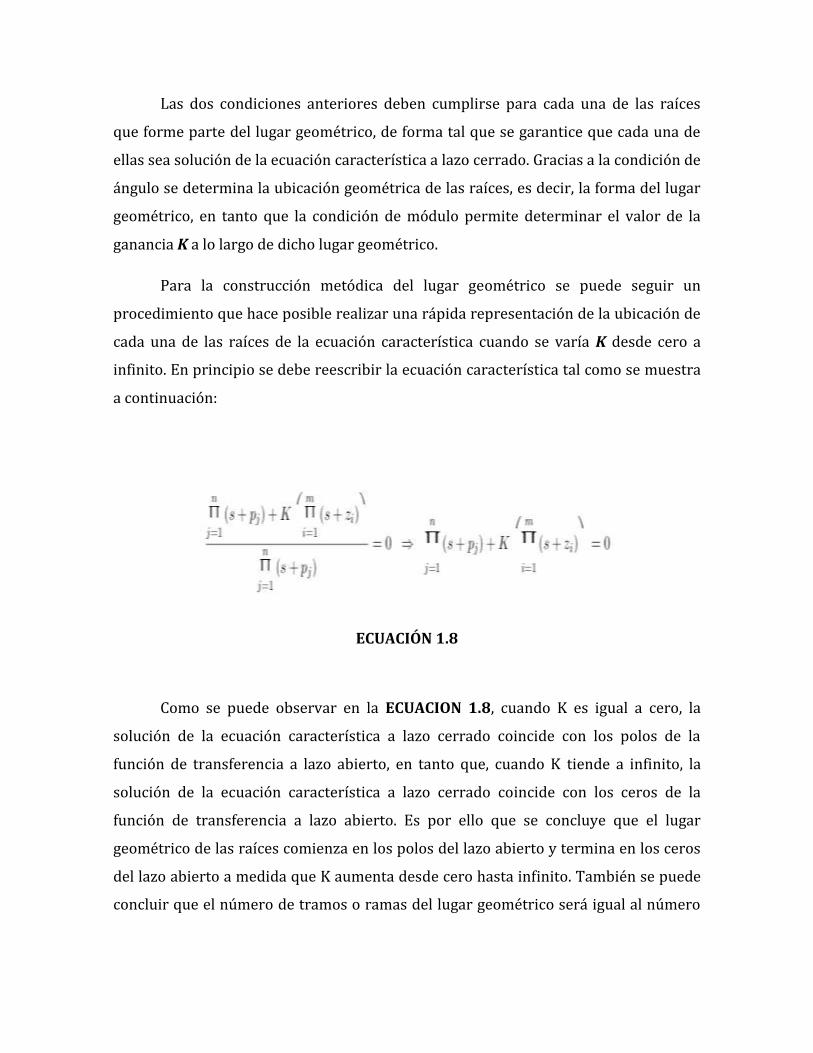
Para la construcción metódica del lugar geométrico se puede seguir un
procedimiento que hace posible realizar una rápida representación de la ubicación de
cada una de las raíces de la ecuación característica cuando se varía K desde cero a
infinito. En principio se debe reescribir la ecuación característica tal como se muestra
a continuación:
ECUACIÓN 1.8
Como se puede observar en la ECUACION 1.8, cuando K es igual a cero, la
solución de la ecuación característica a lazo cerrado coincide con los polos de la
función de transferencia a lazo abierto, en tanto que, cuando K tiende a infinito, la
solución de la ecuación característica a lazo cerrado coincide con los ceros de la
función de transferencia a lazo abierto. Es por ello que se concluye que el lugar
geométrico de las raíces comienza en los polos del lazo abierto y termina en los ceros
del lazo abierto a medida que K aumenta desde cero hasta infinito. También se puede
concluir que el número de tramos o ramas del lugar geométrico será igual al número

de polos de la función de transferencia de lazo abierto y que siempre será simétrico
respecto al eje real
Paso 1 Dibujar sobre el Plano s los polos y ceros del lazo abierto.
Paso 2 Determinar que parte del eje real pertenece al lugar geométrico. A
partir de la condición de ángulo se determina que las partes del eje real que
pertenecen al lugar geométrico son aquellas que se encuentran a la izquierda
de un número impar de polos y ceros.
Paso 3 Determinar el número de asíntotas, NA, la ubicación de su punto de
partida, σA y del ángulo de las mismas, φA, utilizando las ECUACIONES 1.14,
1.15 y 1.16, respectivamente.
Paso 4 Si existe, calcular los puntos de ruptura o despegue del eje real.
Paso 5 Dibujar un esbozo completo del lugar geométrico de las raíces.
Paso 6 Si existe, calcular el corte con el eje imaginario.
Utilizando el procedimiento anterior se puede obtener, de forma rápida y
eficaz, un esbozo del lugar geométrico de la raíces de la ecuación característica a lazo
cerrado cuando se varía K desde cero a infinito.
ECUACION 1.14 ECUACION 1.16
ECUACION 1.15
DEFINICIÓN DE MATLAB
MATLAB (abreviatura de MATrix LABoratory, "laboratorio de matrices") es
una herramienta de software matemático que ofrece un entorno de desarrollo
integrado (IDE) con un lenguaje de programación propio (lenguaje M). Está disponible
para las plataformas Unix, Windows y Mac OS X.
Entre sus prestaciones básicas se hallan: la manipulación de matrices, la
representación de datos y funciones, la implementación de algoritmos, la creación de
interfaces de usuario (GUI) y la comunicación con programas en otros lenguajes y con
otros dispositivos hardware. El paquete MATLAB dispone de dos herramientas
adicionales que expanden sus prestaciones, a saber, Simulink (plataforma de
simulación multidominio) y GUIDE (editor de interfaces de usuario - GUI). Además, se
pueden ampliar las capacidades de MATLAB con las cajas de herramientas
(toolboxes); y las de Simulink con los paquetes de bloques (blocksets).
Es un software muy usado en universidades y centros de investigación y
desarrollo. En los últimos años ha aumentado el número de prestaciones, como la de
programar directamente procesadores digitales de señal o crear código VHDL.

APLICACIONES DE MATLAB EN CONTROL
El control es quizás una de las áreas con más desarrollo dentro de la industria y
manufactura moderna. Especialistas del área han encontrado en MatLab una
herramienta muy poderosa para simular sistemas de control de muy diversos tipos.
Es por eso, que el Toolbox de control contenido en MatLab es uno de los más
completos actualmente.
Mediante las aplicaciones de esta área que hemos incluido se busca que todo
aquel usuario que pretenda utilizar esta herramienta, sepa que tipo de funciones
pueden ayudarlo para realizar la mayor cantidad de tareas que pudimos abarcar.
1. Comenzamos en el primer ejemplo, por mencionar los diversos tipos de respuestas
que se pueden esperar de un sistema. En este caso comentamos tres tipos,
dependiendo de la señal de entrada, la primera respuesta corresponde a un escalón, la
segunda corresponde a un impulso y la última a una rampa. Las primeras dos tienen
funciones propias dentro del Toolbox de control y son “step” e “impulse
“respectivamente, sin embargo el tercer tipo de señal de entrada no, por lo que
tendremos nuevamente que remitirnos a su definición matemática para generar una
expresión que la represente. Una vez logrado esto, se analiza la respuesta de un
sistema dado, determinado mediante su función de transferencia y listo. El usuario
podrá observar las salidas gráficamente. Es importante para estas alturas que el
usuario maneje a la perfección la representación de ecuaciones en MatLab, por lo que
constantemente se le recuerda del procedimiento requerido

Diferentes tipos de impulso generados mediante funciones de Matlab
2. El segundo ejemplo contempla el desarrollo de uno de los puntos de partida
primarios para un diseñador que pretenda implementar un sistema estable. Nos
referimos al concepto del Lugar Geométrico de las Raíces. Este procedimiento consiste
en colocar los polos y ceros de la función de transferencia en los lugares apropiados
dentro del plano imaginario, de manera que se asegure la estabilidad y la ganancia
deseada del sistema.
Para lograr esto se explican y se recurre a las funciones “roots” y “rlocus” que
desplegarán los puntos de interés en dicho plano. Es importante mencionar también
que dentro de este ejemplo se le muestra al usuario como convulsionar una función de
manera que la localización de ciertos puntos (en este caso los polos) sea más sencilla.
Función “conv”.

3. El tercer ejemplo muestra nuevamente una función muy propia del Toolbox de
control, conocida como “margin”, que representa la gráfica de Bode señalando el
margen de ganancia y de fase de la función de transferencia. Así mismo se presenta la
función Nyquist que genera el gráfico del mismo nombre de la función de
transferencia.

FUNCIÓN PARA CALCULAR EL LGR EN MATLAB
Los comandos más utilizados en matlab para el LGR y RF son:
Los comandos más utilizados en matlab para el LGR son:
rltool Sirve para manipular los polos y ceros en un LGR, se pueden obtener también las gráficas de la respuesta a distintas entradas y los diagramas de Bode, Nyquist y Nichols.
RLTOOL
rlocus Se utiliza para graficar el LGR
RLOCUS(SYS)
rlocfind Determina la ganancia del LGR, para un polo determinado.
RLOCFIND(SYS)

REFERENCIAS ELECTRONICAS
http://es.wikipedia.org/wiki/MATLAB
ciecfie.epn.edu.ec/CControlC/laboratorios/
www.slideshare.net/capillajo/teoria-del-lugar-geomtrico-de-las-raices
catarina.udlap.mx/u_dl_a/tales/documentos/lep/...n.../capitulo3
http://www.ib.cnea.gov.ar/~dsc/capitulo8/rootlocus.htm