1 Trigonometr¶‡a. - valmeida.webs.ull.es · Fundamentos Matem¶aticos de la Ingenier¶‡a....
22
Fundamentos Matem´aticos de la Ingenier´ ıa. (Tema 5) Hoja 1 Escuela T´ ecnica Superior de Ingenier´ ıa Civil e Industrial (Esp. en Hidrolog´ ıa) Fundamentos Matem´ aticos de la Ingenier´ ıa. Tema 5: Geometr´ ıa del plano y del espacio. Curso 2008-09 1 Trigonometr´ ıa. 1.1 ´ Angulos y razones Un ´angulo viene determinado por dos semirrectas, llamadas lados, con un mismo origen llamado v´ ertice. Medida de ´ angulos. En el sistema sexagesimal se toma como unidad el ´angulo recto. Un ´angulo recto se divide en 90 partes llamadas grados sexagesimales. En el sistema circular la unidad de medida es el radi´an. Un ´angulo mide un radi´an cuando la longitud del arco es igual al radio. 360 o =2π radianes Si la medida de un ´angulo es de g grados sexagesimales y r en radianes, se verifica: g 180 = r π Razones trigonom´ etricas de un ´ angulo agudo. sen α = longitud del cateto opuesto a α longitud de la hipotenusa cos α = longitud del cateto contiguo a α longitud de la hipotenusa tg α = longitud del cateto opuesto a α longitud del cateto contiguo a α = sen α cos α Adem´ as se definen las razones secante (sec), cosecante (cosec) y cotangente (ctg) de la forma: secα = 1 cosα cosecα = 1 senα ctgα = 1 tgα
-
Upload
vuongthien -
Category
Documents
-
view
226 -
download
0
Transcript of 1 Trigonometr¶‡a. - valmeida.webs.ull.es · Fundamentos Matem¶aticos de la Ingenier¶‡a....

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 1
Escuela Tecnica Superior de Ingenierıa Civil e Industrial (Esp. en Hidrologıa)
Fundamentos Matematicos de la Ingenierıa.
Tema 5: Geometrıa del plano y del espacio. Curso 2008-09
1 Trigonometrıa.
1.1 Angulos y razones
Un angulo viene determinado por dos semirrectas, llamadas lados, con un mismo origen llamado vertice.Medida de angulos.En el sistema sexagesimal se toma como unidad el angulo recto. Un angulo recto se divide en 90 partes
llamadas grados sexagesimales.En el sistema circular la unidad de medida es el radian. Un angulo mide un radian cuando la longitud del
arco es igual al radio.360o = 2π radianes
Si la medida de un angulo es de g grados sexagesimales y r en radianes, se verifica:
g
180=
r
π
Razones trigonometricas de un angulo agudo.
sen α = longitud del cateto opuesto a α
longitud de la hipotenusa
cos α = longitud del cateto contiguo a α
longitud de la hipotenusa
tg α = longitud del cateto opuesto a α
longitud del cateto contiguo a α=
sen α
cos α
Ademas se definen las razones secante (sec), cosecante (cosec) y cotangente (ctg) de la forma:
secα =1
cosα
cosecα =1
senα
ctgα =1
tgα

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 2
Razones de los angulos de 0o, 30o, 45o, 60o y 90o.
0o 30o 45o 60o 90o
seno 0 12
√2
2
√3
2 1coseno 1
√3
2
√2
212 0
tangente 0√
33 1
√3 no definida
Relacion fundamental de la trigonometrıa.
sen 2α + cos2 α = 1
Como se puede observar esta relacion es consecuencia inmediata del Teorema de Pitagoras
h2 = C2 + c2,
es decir, el cuadrado de la hipotenusa es igual a la suma de los cuadrados de los catetos.
Ejercicios
1. Calcula la altura que alcanza una escalera de 6m de longitud cuando descansa sobre una pared y formaun angulo de 60o con el suelo.
Solucion: x = 6sen60o.
2. Se quiere medir la altura de una estatua situada sobre un pedestal. Desde un punto que se encuentra a20m del pedestal, este se observa bajo un angulo de 12o y el extremo superior de la estatua bajo un angulode 28o. ¿Que altura tiene la estatua?
Solucion: y = 20(tg28o − tg12o)
3. Calcula la altura de un edificio sabiendo que, desde cierto punto, la cuspide del edificio forma un angulode 30o con la horizontal y cuando nos aproximamos 70m el angulo es de 60o.
Solucion: y =70tg60otg30o
tg60o − tg30o.
Relaciones entre las razones de angulos distintos.
Complementarios Suplementarios Difieren en 180o Opuestoscos(90o − α) = sen α cos(180o − α) = − cosα cos(180o + α) = − cosα cos(−α) = cosαsen (90o − α) = cos α sen (180o − α) = sen α sen (180o + α) = −sen α sen (−α) = −sen αtg (90o − α) = ctgα tg (180o − α) = −tg α tg (180o + α) = tg α tg (−α) = −tg α
Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 3
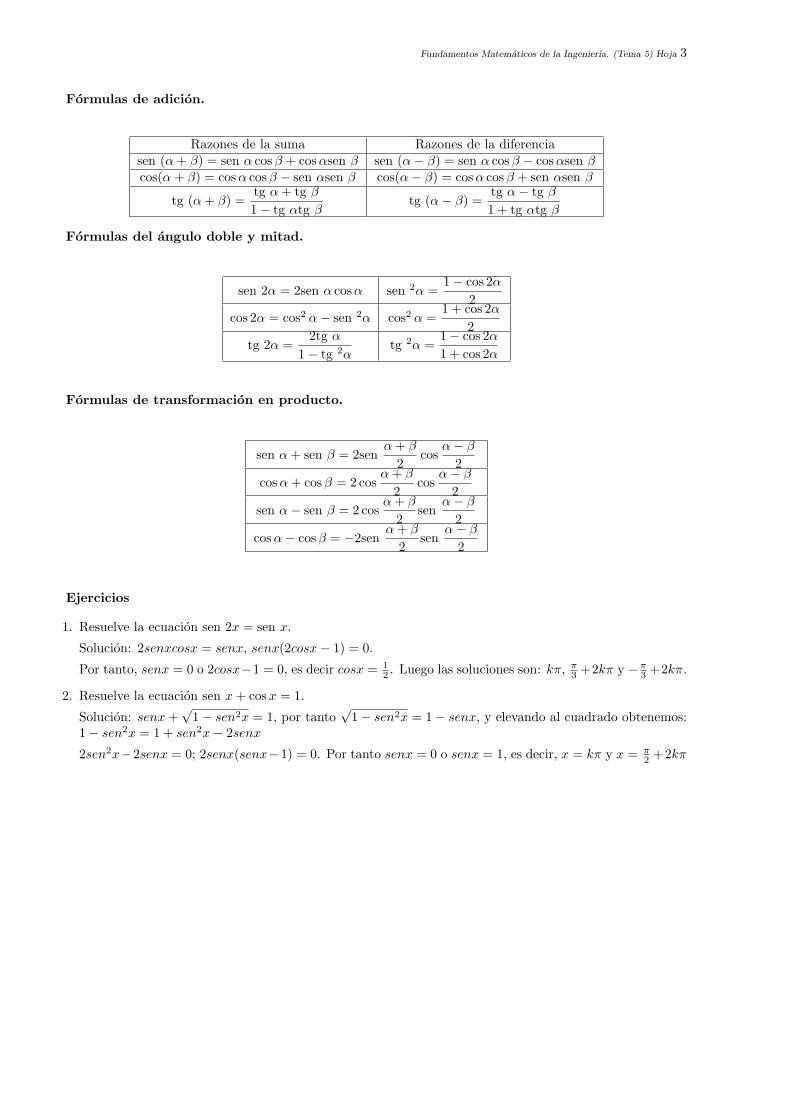
Formulas de adicion.
Razones de la suma Razones de la diferenciasen (α + β) = sen α cos β + cos αsen β sen (α− β) = sen α cos β − cosαsen βcos(α + β) = cos α cos β − sen αsen β cos(α− β) = cosα cos β + sen αsen β
tg (α + β) =tg α + tg β
1− tg αtg βtg (α− β) =
tg α− tg β
1 + tg αtg β
Formulas del angulo doble y mitad.
sen 2α = 2sen α cosα sen 2α =1− cos 2α
2cos 2α = cos2 α− sen 2α cos2 α =
1 + cos 2α
2tg 2α =
2tg α
1− tg 2αtg 2α =
1− cos 2α
1 + cos 2α
Formulas de transformacion en producto.
sen α + sen β = 2senα + β
2cos
α− β
2cos α + cosβ = 2 cos
α + β
2cos
α− β
2sen α− sen β = 2 cos
α + β
2sen
α− β
2cosα− cos β = −2sen
α + β
2sen
α− β
2
Ejercicios
1. Resuelve la ecuacion sen 2x = sen x.
Solucion: 2senxcosx = senx, senx(2cosx− 1) = 0.
Por tanto, senx = 0 o 2cosx−1 = 0, es decir cosx = 12 . Luego las soluciones son: kπ, π
3 +2kπ y −π3 +2kπ.
2. Resuelve la ecuacion sen x + cosx = 1.
Solucion: senx +√
1− sen2x = 1, por tanto√
1− sen2x = 1− senx, y elevando al cuadrado obtenemos:1− sen2x = 1 + sen2x− 2senx
2sen2x−2senx = 0; 2senx(senx−1) = 0. Por tanto senx = 0 o senx = 1, es decir, x = kπ y x = π2 +2kπ

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 4
1.2 Resolucion de triangulos
Sea ABC un triangulo, donde denotamos por A, B, C los angulos y por a, b, c, los lados enfrentados a losangulos A, B, C, respectivamente.
Se verifica:A + B + C = 180o = π radianes
Teorema del seno:a
sen A=
b
sen B=
c
sen C= 2R
siendo R el radio de la circunferencia circunscrita al triangulo.
Teorema del coseno:a2 = b2 + c2 − 2bc cos A
b2 = a2 + c2 − 2ac cosB
c2 = a2 + b2 − 2ab cos C
Area del triangulo:
S =12absen C
S =12acsen B
S =12bcsen A
Dado p =a + b + c
2,
S =√
p(p− a)(p− b)(p− c) (Formula de Heron)
Ejercicios
1. Un barco que se encuentra frente a un golfo es observado desde los dos cabos que lo forman y que distan10km. Desde cada cabo se ve el barco con angulos de 28o y 32o. Calcula la menor distancia a que seencuentra el barco de la costa.
Solucion:sen120o
10=
sen28o
a
2. Desde un aeropuerto C se observan dos aviones A y B bajo un angulo de 38o. Si los aviones distan 5 y 8km del aeropuerto, calcula la distancia que separa a los aviones.
Solucion: a2 = 82 + 52 − 2× 8× 5cos38o

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 5
2 El plano y el espacio euclıdeos. Operaciones
2.1 Introduccion
R2 = {(x, y) /x, y ∈ R} ; R3 = {(x, y, z) /x, y, z ∈ R}Es usual representar, por comodidad, a los elementos de estos conjuntos por u, entendiendose que tienen
dos o tres coordenadas segun trabajemos en R2 o R3 y se les denomina vectores. En estos conjuntos se definendos operaciones: una interna llamada suma y una externa llamada producto por un escalar.
2.2 Suma
u
v
uv+
(x1, y1) + (x2, y2) = (x1 + x2, y1 + y2) y (x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)
Ejemplos:
• (1, 2) + (−4, 5) = (1 + [−4], 2 + 5) = (−3, 7)
• (1, 2,−3) + (4,12, 2.5) = (1 + 4, 2 +
12,−3 + 2.5) = (5,
52,−0.5)
Esta operacion verifica las propiedades usuales de una suma: sean u, v, w vectores de R2 (R3).
1. Asociativa: u + (v + w) = (u + v) + w
2. Conmutativa: u + v = v + u
3. Elemento neutro: u + 0 = u, 0 = (0, 0) o 0 = (0, 0, 0)
4. Opuesto: u + (−u) = 0, −u = (−x,−y) o −u = (−x,−y,−z)
2.3 Producto por un escalar
λ(x, y) = (λx, λy) y λ(x, y, z) = (λx, λy, λz) donde λ ∈ R.Esta operacion esta relacionada con el paralelismo de vectores, de forma que dos vectores u, v son paralelos siy solo si existe un numero real α tal que u = α v y se escribe u ‖ v. Una aplicacion geometrica de este ultimohecho son las ecuaciones vectoriales y parametricas de las rectas, tanto en el plano como en el espacio.

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 6
O
P( )x,y
v
r
v v ,v=( )1 2
OP =( )0 0x ,y0
OP=( )x,y P0
(a) En R2, la ecuacion de la recta que pasa por el punto P0(x0, y0) y que tiene como vector director av = (v1, v2), se obtiene al tener en cuenta que dado un punto cualquiera P (x, y) de la recta debe ocurrirque P0P ‖ v y este hecho caracteriza a todos los puntos de la recta. Por lo tanto P0P = λ v. Recordar quelas coordenadas del vector que une dos puntos se calculan restando a las coordenadas del punto extremolas del punto origen. Luego:
(x− x0, y − y0) = λ (v1, v2) ⇔ (x, y) = (x0, y0) + λ (v1, v2) (Ec. vectorial){
x = x0 + λ v1
y = y0 + λ v2(Ec. Parametricas)
x− x0
v1=
y − y0
v2(Ecuacion continua)
y − y0 =v2
v1(x− x0) ( Ecuacion punto-pendiente)
el cociente m =v2
v1recibe el nombre de pendiente y coincide con la tangente del angulo que forma la recta
con el eje OX. En el caso de las rectas paralelas al eje OX, m = 0. Para las rectas paralelas al eje OY ,m = ∞.
y = mx + n (Forma explıcita) n =v2
v1x0 + y0
ax + by + c = 0 (Forma general o implıcita:) b = −v1, a = v2, c = −v2x0 + v1y0
(b) Analogamente, en R3, la ecuacion de la recta que pasa por el punto P0(x0, y0, z0) y que tiene como vectordirector a v = (v1, v2, v3), sera :
(x− x0, y − y0, z − z0) = λ (v1, v2, v3) ⇔ (x, y, z) = (x0, y0, z0) + λ (v1, v2, v3) (Ec. vectorial)
x = x0 + λ v1
y = y0 + λ v2
z = z0 + λ v3
(Ec. Parametricas)
x− x0
v1=
y − y0
v2=
z − z0
v3(Ecuaciones continuas)
{ax + by + cz + d = 0
a′x + b′y + b′z + d′ = 0 (Ecuaciones generales)

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 7
Ejemplos:
• 23
(1,−3) = (23
1,23
[−3]) = (23,−2)
•√
5 (4,−1, 0) = (√
5 4,√
5 [−1],√
5 0) = (4√
5,−√
5, 0)
• Hallar la recta que pasa por el punto P0(1, 1) y tiene como vector director a v = (−2, 3).
(x− 1, y − 1) = λ (−2, 3) ⇔ (x, y) = (1, 1) + λ (−2, 3) (Ec. vectorial){
x = 1− 2 λy = 1 + 3 λ
(Ec. Parametricas)
• Hallar la recta que pasa por los puntos P0(1,−2, 0) y P1(2, 3,−1).En primer lugar hemos de averiguar el vector director de la recta, pero es obvio que debe ser el que unelos dos puntos dados, es decir v = P0P1 = (1, 5,−1). A partir de aquı la cosa es sencilla
(x− 1, y − (−2), z − 0) = λ (1, 5,−1) ⇔ (x, y, z) = (1,−2, 0) + λ (1, 5,−1) (Ec. vectorial)
x = 1 + λy = −2 + 5 λz = −λ
(Ec. Parametricas)
Las propiedades mas importantes de esta operacion son: sean u, v vectores de R2 (R3), y λ, µ ∈ R.
1. λ(u + v) = λu + λv
2. (λ + µ)u = λu + µu
3. λ(µu) = (λµ)u
4. 1u = u
5. 0u = 0
6. λ0 = 0
3 Modulo de un vector
Se define el modulo de un vector como
|u| =√
x2 + y2 (u = (x, y) ∈ R2) ; |u| =√
x2 + y2 + z2 (u = (x, y, z) ∈ R3)
Este numero mide el tamano del vector.
| |u
x
y

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 8
Ejemplos:
• |(2, 3)| =√
22 + 32 =√
4 + 9 =√
13
• |(−1,12, 4)| =
√(−1)2 +
(12
)2
+ 42 =
√1 +
14
+ 16 =√
4 + 1 + 642
=√
692
Un vector se dice unitario si su modulo es 1. Se denominan vectores unitarios canonicos a los siguientes:
i = (1, 0), j = (0, 1) (en R2)
i = (1, 0, 0), j = (0, 1, 0), k = (0, 0, 1) (en R3)
Todo vector de R2 o R3, se expresa como combinacion lineal de los correspondientes vectores canonicos
u = (x, y) = x i + y j , u = (x, y, z) = x i + y j + z k
4 Producto escalar
Dados dos vectores no nulos u y v, se define el producto escalar de estos como el numero real:
u.v = |u|.|v|.cos α
siendo α el angulo que forman dichos vectores. Si uno de los vectores es nulo, el producto escalar es cero. Elproducto escalar tambien dara cero cuando los vectores sean perpendiculares, ya que en dicho caso el anguloformado por estos es de 90◦ y cos(90◦) = 0.
El producto escalar de dos vectores es igual al modulo de uno de ellos por la proyeccion del otro sobre el.En terminos de coordenadas el producto escalar se expresa como:
u.v = x1.x2 + y1.y2 (u = (x1, y1) , v = (x2, y2) ∈ R2)
u.v = x1.x2 + y1.y2 + z1.z2 (u = (x1, y1, z1) , v = (x2, y2, z2) ∈ R3)
Este ultimo hecho nos permite hallar la ecuacion de un plano que pasa por un punto dado P0(x0, y0, z0) ytiene como vector perpendicular, es decir, vector director a v = (v1, v2, v3).
P
O
P0 P( )x,y,z
v v ,v ,=( )1 2 v3
OP =( )0 x ,y ,z0 0 0
OP=( )x,y,z
v
Notese que si P (x, y, z) es cualquier punto del plano mencionado, ha de ocurrir que los vectores P0P y vsean perpendiculares, y ademas esta cuestion caracteriza a todos los puntos de ese plano. Por tanto:
P0P ⊥ v ⇔ P0P · v = 0 ⇔ v1(x− x0) + v2(y − y0) + v3(z − z0) = 0

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 9
llegandose a la ecuacion general del plano
Ax + By + Cz + D = 0 (A = v1, B = v2, C = v3, D = −[v1x0 + v2y0 + v3z0])
El plano puede ser representado, al igual que la recta, en forma vectorial y parametrica. Para ello, seaP0(x0, y0, z0) un punto del plano, u = (u1, u2, u3) y w = (w1, w2, w3) dos vectores del mismo y P (x, y, z) unpunto arbitrario de este. Entonces,
(x−x0, y−y0, z−z0) = λ (u1, u2, u3)+µ (w1, w2, w3) ⇔ (x, y, z) = (x0, y0, z0)+λ (u1, u2, u3)+µ (w1, w2, w3) (Ec. vectorial)
x = x0 + λ u1 + µ w1
y = y0 + λ u2 + µ w2
z = z0 + λ u3 + µ w3
(Ec. Parametricas)
4.1 Propiedades
Sean u, v, w vectores en el plano o en el espacio y λ numero real.
1. u · v = v · u2. u · (v + w) = u · v + u · w3. λ (u · v) = (λ u) · v = u · (λ v)
4. 0 · u = 0
Es facil comprobar que el modulo de un vector puede escribirse como√
u.u y que un vector unitario verificaque u.u = 1.
Ejemplos:
• u = (1, 3) , v = (0,−2) ⇒ u · v = 1 · 0 + 3 · (−2) = −6
• u = (−1, 2,12) , v = (4,
13,−2) ⇒ u · v = −(1) · 4 + 2 · 1
3+
12· (−2) = −4 +
23− 1 =
−133
• Calcular el angulo entre los vectores u = (−4, 0, 2) y v = (2, 0,−1).
cos(u, v) =u · v|u| · |v| =
−10√20 · √5
= −1 ⇒ u, v = π rad.
• Hallar la ecuacion del plano que pasa por el punto P0(2, 1, 1) y tiene como vector director a v = (9, 6, 12).
(x− 2, y − 1, z − 1) · (9, 6, 12) = 0 ⇔ 9(x− 2) + 6(y − 1) + 12(z − 1) = 0 ⇔ 9x + 6y + 12z − 36 = 0
es decir3x + 2y + 4x− 12 = 0

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 10
5 Producto vectorial
Dados los vectores u, v ∈ R3 que forman un angulo α, se llama producto vectorial de u y v a un vector querepresentamos por u× v y queda caracterizado del siguiente modo:
u
v
u vx
v ux
Modulo: |u× v| = |u|.|v|.|sen α|Direccion: perpendicular al plano determinado por los vectores u y vSentido: el de avance de un sacacorchos que gira en sentido positivo de u a v
5.1 Propiedades
Sean u, v, w vectores en el espacio y λ numero real.
1. u× v = −(v × u)
2. u× (v + w) = u× v + u× w
3. λ (u× v) = (λ u)× v = u× (λ v)
4. u× 0 = 0× u = 0
5. u× u = 0
El modulo del vector u×v es igual al area del paralelogramo que tiene por lados adyacentes a los vectoresu y v.
u
v
En terminos de coordenadas, el producto vectorial se expresa como: u = (x1, y1, z1), v = (x2, y2, z2)
u× v = (y1z2 − z1y2, z1x2 − x1z2, x1y2 − y1x2)
Una regla, facil de recordar, para calcular las coordenadas de u × v es el desarrollo del siguiente pseudo-determinante
u× v =
∣∣∣∣∣∣
i j kx1 y1 z1
x2 y2 z2
∣∣∣∣∣∣= (y1z2 − z1y2) i + (z1x2 − x1z2) j + (x1y2 − y1x2) k

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 11
Ejemplos:
• u = (1,−4, 1), v = (2, 3, 0)
u× v =
∣∣∣∣∣∣
i j k1 −4 12 3 0
∣∣∣∣∣∣=
∣∣∣∣−4 13 0
∣∣∣∣ i −∣∣∣∣
1 12 0
∣∣∣∣ j +∣∣∣∣
1 −42 3
∣∣∣∣ k = −3 i + 2 j + 11 k = (−3, 2, 11)
• Mostrar que el cuadrilatero con vertices en los puntos siguientes es un paralelogramo y calcular su area.A(5, 2, 0), B(2, 6, 1), C(2, 4, 7), D(5, 0, 6).Los lados del cuadrilatero los constituyen los cuatro vectores AB, AD, CB, y CD. Hallemos dichosvectores
AB = (−3, 4, 1); AD = (0,−2, 6); CB = (0, 2,−6); CD = (3,−4,−1)
es facil apreciar que CD = −AB y que CB = −AD, luego los lados del cuadrilatero son paralelos dos ados, es decir, es un paralelogramo. En cuanto al area de este, bastara con calcular el modulo del vectorque se obtiene al multiplicar vectorialmente dos de los vectores adyacentes que constituyen sus lados.
AB×AD =
∣∣∣∣∣∣
i j k−3 4 10 −2 6
∣∣∣∣∣∣=
∣∣∣∣4 1−2 6
∣∣∣∣ i −∣∣∣∣−3 10 6
∣∣∣∣ j +∣∣∣∣−3 40 −2
∣∣∣∣ k = 26 i+18 j+6 k = (26, 18, 6)
y el modulo de este vector nos dara el area buscada
Area =√
(26)2 + (18)2 + (6)2 =√
1036 u.a.
• Hallar la ecuacion del plano que contiene a los puntos P0(2, 1, 1), P1(0, 4, 1) y P2(−2, 1, 4).Por lo visto hasta ahora, lo pedido serıa sencillo si conociesemos un vector perpendicular al plano. Estevector puede obtenerse facilmente efectuando el producto vectorial de los vectores P0P1 y P0P2.
v = P0P1 × P0P2 = (9, 6, 12)
por lo que el plano buscado sera
9(x− 2) + 6(y − 1) + 12(z − 1) = 0 ⇔ 3x + 2y + 4z − 12 = 0
6 Producto mixto
Dados tres vectores u, v, w ∈ R3, se llama producto mixto de estos al producto escalar de u por el vectorresultante del producto vectorial de v por w, y se representa por [u, v, w].
[u, v, v] = u.(v × w)
Es evidente que el producto mixto de tres vectores es un numero real. El valor absoluto de dicho numerocoincide con el volumen del paralelepıpedo que tiene por aristas adyacentes los vectores u, v y w.
u
v
w

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 12
En terminos de coordenadas, el producto mixto se expresa como: u = (x1, y1, z1), v = (x2, y2, z2),w = (x3, y3, z3)
[u, v, w] = x1(y2z3 − z2y3) + y1(z2x3 − x2z3) + z1(x2y3 − y2x3)
y una forma sencilla de calcularlo serıa desarrollando el siguiente determinante
[u, v, w] =
∣∣∣∣∣∣
x1 y1 z1
x2 y2 z2
x3 y3 z3
∣∣∣∣∣∣= x1(y2z3 − z2y3) + y1(z2x3 − x2z3) + z1(x2y3 − y2x3)
Ejemplo:
• Calcular el volumen del paralelepıpedo que tiene a los vectores u = (3,−5, 1), v = (0, 2,−2)) yw = (3, 1, 1) como aristas adyacentes.
Volumen = |u · (v × w)| =∣∣∣∣∣∣
∣∣∣∣∣∣
3 −5 10 2 −23 1 1
∣∣∣∣∣∣
∣∣∣∣∣∣= |36| = 36 u.v.
7 Posiciones relativas de planos y rectas.
7.1 Rectas en el plano.
Dos rectas del plano pueden cortarse, ser paralelas o ser coincidentes.
1. Si las rectas vienen dadas en forma genaral ax + by + c = 0 y a′x + b′y + c′ = 0
• sia
a′6= b
b′las dos rectas se cortan.
• sia
a′=
b
b′, entonces: si
a
a′=
b
b′6= c
c′son paralelas y si
a
a′=
b
b′=
c
c′coinciden
2. Si vienen dadas en forma vectorial OX = OP + td y OX = OQ + td′
• si d 6= kd′, se cortan
• si d = kd′y OP −OQ 6= k′d, son paralelas
• si d = kd′ = k′(OP −OQ), son la misma recta
3. Si vienen dadas en forma explıcita y = mx + n e y = m′x + n′
• si m 6= m′, se cortan
• si m = m′ y n 6= n′, son paralelas
• si m = m′ y n = n′, coinciden
Angulo entre dos rectas: el angulo que forman dos rectas r y r′, es el que forman sus vectores directores. Siestos son d y d′, el angulo φ sera:
cos φ = cos(d, d′) =d.d′
|d||d′|Cuando la inclinacion de las rectas viene dada por sus pendientes m y m′, el angulo φ se determina por
tag φ = tag(α− β) =tag α− tag β
1 + tag α tag β=
m−m′
1 + mm′

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 13
siendo m = tag α y m′ = tag βSi las rectas son perpendiculares, no existe tag φ. En ese caso 1 + mm′ = 0 ⇒ mm′ = −1, o lo que es lo
mismo m′ = − 1m
.
Distancia de un punto a una recta: Dada la recta r : ax+ by + c = 0 y el punto P (x0, y0), la distancia del puntoP a la recta r viene dada por
dist(P, r) = d(P, r) =|ax0 + by0 + c|√
a2 + b2
7.2 Rectas y planos en el espacio.
Aunque no es la unica forma de estudiar la posicion relativa entre planos o rectas o recta y plano, en el espacio.Nosotros lo haremos haciendo uso del algebra matricial, planteando el problema como el estudio de sistemas deecuaciones.
Posicion relativa entre dos planos.Dos planos son paralelos si no tienen ningun punto comun, y secantes (o incidentes) en caso contrario. Dados
dos planos π1 ≡ a1x + b1y + c1z = d1 y π2 ≡ a2x + b2y + c2z = d2, tenemos:
- Son secantes si rango(
a1 b1 c1
a2 b2 c2
)= 2.
- Son paralelos si rango(
a1 b1 c1
a2 b2 c2
)= 1 y rango
(a1 b1 c1 d1
a2 b2 c2 d2
)= 2.
- En el caso de que rango(
a1 b1 c1 d1
a2 b2 c2 d2
)= 1, se trata del mismo plano.
Ejemplo. Estudiar la posicion relativa de los planos π1 ≡ x− 2y + z = 1 y π2 ≡ −2x + 4y − 2z = 3.
Como rango(
1 −2 1−2 4 −2
)= 1 y rango
(1 −2 1 1−2 4 −2 3
)= 2, los planos son paralelos.
Posicion relativa entre una recta y un plano.Existen tres posibilidades: la recta esta contenida en el plano, la recta es paralela al plano o bien la recta y
el plano se cortan en un punto, en cuyo caso diremos que son secantes. Dados la recta
r ≡{
a1x + b1y + c1z = d1
a2x + b2y + c2z = d2y el plano π ≡ a3x + b3y + c3z = d3, se tiene que:
- Si
∣∣∣∣∣∣
a1 b1 c1
a2 b2 c2
a3 b3 c3
∣∣∣∣∣∣6= 0, la recta y el plano son secantes.
- Si rango
a1 b1 c1
a2 b2 c2
a3 b3 c3
= 2 y rango
a1 b1 c1 d1
a2 b2 c2 d2
a3 b3 c3 d3
= 3, la recta y el plano son paralelos.
- Si rango
a1 b1 c1 d1
a2 b2 c2 d2
a3 b3 c3 d3
= 2, la recta esta contenida en el plano.
Ejemplo. Dada la recta r ≡{
2x + y + z = 1x +−2y + z = −1 , encontrar el valor de α para que el plano
π ≡ αx + 6y + 3z = 6 sea paralelo a r.

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 14
Necesitamos que rango
2 1 11 −2 1α 6 3
= 2 y rango
2 1 1 11 −2 1 −1α 6 3 6
= 3. Entonces
∣∣∣∣∣∣
2 1 11 −2 1α 6 3
∣∣∣∣∣∣= −12 + α + 6 + 2α− 12− 3 = 3α− 21 = 0 ⇒ α = 7
y ademas ∣∣∣∣∣∣
1 1 1−2 1 16 3 6
∣∣∣∣∣∣= 3 6= 0
Por tanto, para α = 7 la recta y el plano son paralelos.
Posicion relativa entre dos rectas.Hay tres situaciones posibles: las rectas se cortan en un punto, son paralelas o se cruzan. Si las rectas vienen
dadas por la ecuaciones:
r ≡{
a1x + b1y + c1z = d1
a2x + b2y + c2z = d2y s ≡
{a3x + b3y + c3z = d3
a4x + b4y + c4z = d4
escribimos
A =
a1 b1 c1
a2 b2 c2
a3 b3 c3
a4 b4 c4
; A∗ =
a1 b1 c1 d1
a2 b2 c2 d2
a3 b3 c3 d3
a4 b4 c4 d4
entonces
- Cuando rango(A) = rango(A∗) = 2, las dos rectas son la misma.
- Cuando rango(A) = 2 y rango(A∗) = 3, las dos rectas son paralelas.
- Cuando rango(A) = rango(A∗) = 3, las dos rectas son secantes.
- Cuando rango(A) = 3 y rango(A∗) = 4, las dos rectas se cruzan.
Nota: El caso rango(A) = 2 y rango(A∗) = 4, nunca puede darse.
Ejemplo. Determinar la posicion relativa de las rectas
r ≡{
x + y + z = 12x− y + z = 2 y s ≡
{ax + y + z = 1x + 3y + 2z = 2
en funcion del parametro real a.Sean
A =
1 1 12 −1 1a 1 11 3 2
; A∗ =
1 1 1 12 −1 1 2a 1 1 11 3 2 2
A =
∣∣∣∣∣∣∣∣
1 1 12 −1 1a 1 11 3 2
∣∣∣∣∣∣∣∣= −1 6= 0

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 15
y por tanto rango(A) = 3. Para hallar el rango de A∗:∣∣∣∣∣∣∣∣
1 1 1 12 −1 1 2a 1 1 11 3 2 2
∣∣∣∣∣∣∣∣= a− 1
ası, rango(A∗) = 4 si a 6= 1, mientras que cuando a = 1, rango(A∗) = 3.En resumen, si a 6= 1, las rectas se cruzan, y cuando a = 1 se cortan. Pudede comprobarse que el punto de
corte es (−1,−1, 3).
8 Conicas. Ecuaciones y elementos caracterısticos.
CircunferenciaUna circunferencia es el conjunto de puntos del plano que equidistan de un punto fijo llamado centro.
Elementos caracterısticos:- Centro (O): punto fijo.- Radio (r): distancia de un punto cualquiera de la circunferencia al centro.
Ecuaciones: Circunferencia de centro O(x0, y0).Ecuacion reducida: (x− x0)2 + (y − y0)2 = r2.Ecuacion general: x2 + y2 + Ax + By + C = 0, siendo A2 + B2 − 4C > 0.
Longitud y area- Longitud: 2πr- Area: πr2
ElipseUna elipse es el conjunto de puntos del plano tales que la suma de sus distancias a dos puntos fijos, llamados
focos, es constante. (2a > 0)
A
B
A’
B’
FF’
ab
c
P
O

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 16
Elementos caracterısticos:- Focos (F , F ′): los dos puntos fijos. La distancia focal es 2c.- Centro (O): Punto medio del segmento FF ′.- Eje focal: recta que pasa por los focos.- Eje normal: mediatriz del segmento FF ′.- Vertices (A,A′, B,B′): Puntos de corte de la elipse con los ejes focal y normal.- Eje mayor: segmento AA′ de longitud 2a.- Eje menor: segmento BB′ de longitud 2b.- Radio vectores de P : segmentos PF y PF ′.- Excentricidad: e =
c
a. Se tiene que 0 ≤ e < 1. Indica lo achatada que puede ser la
elipse.
Relacion fundamental: a2 = b2 + c2.
Ecuaciones: (elipses con ejes paralelos a los ejes de coordenadas)Ecuacion reducida: Elipse de centro O(x0, y0)
- Eje focal paralelo a OX:(x− x0)2
a2+
(y − y0)2
b2= 1.
- Eje focal paralelo a OY :(x− x0)2
b2+
(y − y0)2
a2= 1.
Ecuacion general: Mx2 + Ny2 + Ax + By + C = 0, siendo M y N del mismo signo y|M |B2 + |N |A2 − 4MN |C| > 0.
Longitud y area
- Longitud: ≈ 2π
√a2 + b2
2- Area: πab
HiperbolaUna hiperbola es el conjunto de puntos del plano tales que el valor absoluto de la diferencia de sus distancias
a dos puntos fijos, llamados focos, es constante. (2a > 0)
A
B
A’
B’
FF’a
bc
P
O
Elementos caracterısticos:- Focos (F, F ′): los dos puntos fijos. La distancia focal es 2c.- Centro (O): Punto medio del segmento FF ′.- Eje focal: recta que pasa por los focos.- Eje normal: mediatriz del segmento FF ′.- Vertices (A,A′): Puntos de corte de la hiperbola con el eje focal.- Eje real: segmento AA′. Su longitud es 2a.- Eje imaginario: segmento BB′ de longitud 2b, donde B y B′ son los puntos de
corte del eje normal y la circunferencia de centro A y radio c.

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 17
- Radio vectores de P : segmentos PF y PF ′.- Excentricidad: e =
c
a. Se tiene que e > 1. Indica lo abierta o cerrada que esta la
hiperbola.- Asıntotas: (hiperbola de centro O(x0, y0))
- Eje focal paralelo a OX: y − y0 = ± b
a(x− x0).
- Eje focal paralelo a OY : x− x0 = ± b
a(y − y0).
Relacion fundamental: c2 = a2 + b2.
Ecuaciones: (hiperbolas con ejes paralelos a los ejes de coordenadas)Ecuacion reducida: Hiperbola de centro O(x0, y0)
- Eje focal paralelo a OX:(x− x0)2
a2− (y − y0)2
b2= 1.
- Eje focal paralelo a OY :(y − y0)2
a2− (x− x0)2
b2= 1.
Ecuacion general: Mx2 + Ny2 + Ax + By + C = 0, siendo M y N de distinto signo.
ParabolaUna parabola es el conjunto de puntos del plano que equidistan de un punto fijo, llamado foco, y de una
recta fija llamada directriz.
VA
Fp
P
d
Elementos caracterısticos:- Foco (F ): el punto fijo.- Directriz (d): recta fija.- Eje: recta perpendicular a la directriz que pasa por el foco.- Parametro (p): distancia del foco a la directriz.- Vertice (V ): Punto de corte de la parabola con el eje. Es el punto medio del
segmento AF , donde A es el punto de corte del eje y la directriz.- Radio vector de P : segmento PF .
Ecuaciones: (parabolas con ejes paralelos a los ejes de coordenadas)Ecuacion reducida: Parabola de vertice V (x0, y0) y parametro p.
- Eje paralelo a OX y abierta a la derecha: (y − y0)2 = 2p(x− x0).- Eje paralelo a OX y abierta a la izquierda: (y − y0)2 = −2p(x− x0).- Eje paralelo a OY y abierta hacia arriba: (x− x0)2 = 2p(y − y0).- Eje paralelo a OY y abierta hacia abajo: (x− x0)2 = −2p(y − y0).
Ecuacion general:- Eje paralelo a OX: x = Ay2 + By + C, siendo A 6= 0.- Eje paralelo a OY : y = Ax2 + Bx + C, siendo A 6= 0.

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 18
9 Ejercicios
1. Resolver el triangulo ABC en los siguientes supuestos:
(a) c = 25, A = 35o, B = 68o.
(b) a = 25.2, b = 37.8, c = 43.4.
(c) b = 7, c = 8, A = 30o.
(d) c = 628, b = 480 y C = 55o10′.
(e) a = 132, b = 224 y C = 28o40′.
2. Una torre esta situada en un terreno llano directamente al norte del punto A y al oeste de un punto B.La distancia entre los puntos A y B es de c metros. Si los angulos de elevacion del extremo superior de latorre medidos desde A y B, son a y b respectivamente, encontrar la altura h de la torre.
3. Desde lo alto de un faro, a 175m sobre el nivel del mar, el angulo de depresion de un barco situadodirectamente al sur, es 18o50′. Dos minutos mas tarde el angulo de depresion es 14o20′. Calcular lavelocidad media del barco si se observa que navega directamente hacia el oeste.
4. Encontrar la altura de un arbol si el angulo de elevacion de su extremo superior crece desde 20o hasta 40o
cuando un observador avanza 75m. hacia el pie del arbol.
5. En las orillas opuestas de un rı o se situan dos puntos A y B. En la orilla donde esta situado el punto Ase determina un segmento de recta AC = 275m y se miden los angulos CAB = 125o40′ y ACB = 48o50′.Encontrar la longitud de AB.
6. Se desea calcular la altura de una torre de lanzamiento de cohetes; para ello se hacen dos observacionesdesde los puntos A y B, al oeste de la torre, obteniendo como angulos de elevacion 30o y 45o, respectiva-mente. La distancia AB=30 m. Hallar la altura de la torre.
7. Pedro y Ana han creido ver un OVNI desde dos puntos situados a 800 m, con angulos de elevacion 30o y75o. Si el OVNI esta situado entre ambos, ¿sabrı as calcular la altura a la que se encuentra?
8. Una escalera de bomberos de 10 m de longitud se ha fijado en un punto de la calzada. Si se apoya sobreuna de las fachadas forma un angulo con el suelo de 45o y si se apoya sobre la otra fachada forma unangulo de 30o. Halla la anchura de la calle. ¿Que altura sobre cada una de las fachadas se alcanza condicha escalera?
9. Halla el area de un hexagono regular de 10cm de lado.
10. Calcular el area de un octogono regular de lado 7cm.
11. La diferencia entre la longitud de una circunferencia y el perımetro de un hexagono regular inscrito es de28m. Halla el radio de la circunferencia.
12. Calcula la longitud de un puente que se quiere construir sobre un barranco, conociendo que los angulosque forman los extremos del barranco A y B con un punto en el fondo del barranco O son ABO = 32o yOAB = 48o y que la distancia entre A y O es de 120m.
13. Dos montaneros que han ascendido en fines de semana sucesivos a dos picos querrıan saber que distanciahay entre ellos. Para ello han medido desde la base del pico A los angulos α1 = 85o y α2 = 30o, despueshan caminando hasta la base del pico B y han medido los angulos β1 = 40o y β2 = 93o. La distancia quehay entre dichas bases es de 600m.¿ Podrıas calcularla?

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 19
14. Dados los vectores a = (2, 1), b = (−3, 1) y c = (−2,−2), calcular: a + b; a + c; b + c.
15. Hallar los vectores opuestos de los vectores a, b y c del ejercicio anterior.
16. Con los vectores del ejercicio 1 calcular: 3a + 2b; 2a− 3c; a− 2b + 5c.
17. Dados los puntos A(3, 1) y B(5, 4), hallar las coordenadas del vector AB.
18. Sean CD = (2,−3) y C(5, 7). Calcular las coordenadas de D.
19. En el sistema de referencia R = {0, i, j} se consideran los vectores siguientes: a = (2, 3);b = (0,−1); c = (5, 0); i = (1, 0); j = (0, 1). Hallar: a · b; a · c; i · j.
20. Dado el vector a = (3,−1) encontrar un vector que sea perpendicular a a.
21. Hallar el modulo de los siguientes vectores: a = (2, 1); b = (4, 3); c = (1, 2).
22. Comprobar si los vectores siguientes son unitarios: a = (3, 2); b = (1, 0); c = (1√10
,− 3√10
).
23. El producto escalar de dos vectores es igual a 18, el modulo de uno de ellos es igual a 6 y el angulo queforman es de 60◦. Hallar el modulo del otro.
24. Dados los vectores a = (3, 1) y b = (−1, 2), calcular: a · b y b · a.
25. Dados los vectores a = (3, 1); b = (2,−4) y c = (5, 3), calcular: a · (b + c) y a · b + a · c.26. En el sistema de referencia R = {0, i, j k} se consideran los vectores siguientes: a = (2, 3,−1); b = (0, 1, 3);
c = (5, 0, 4). Hallar: a · b; a · c; b · c.
27. Comprobar si los vectores siguientes son unitarios: a = (3, 2, 0); c = (0,− 3√5,
4√5).
28. Dados los vectores i = (1, 0, 0), j = (0, 1, 0) y k = (0, 0, 1), calcular i× j; i× k; j × k; j × i; k × i y k × j.
29. Hallar el area del paralelogramo formado sobre los vectores a = (2, 1, 5) y b = (3, 2, 1).
30. Dado el vector a del ejercicio anterior, calcular a× a.
31. Hallar el volumen del paralelepıpedo cuyas aristas son los vectores a = (2, 1, 0); j = (0, 1, 0) y b = (3, 2, 1).
32. Dados los vectores a = (2, 0, 1) y b = (0, 3, 1) comprobar si son perpendiculares. En caso negativo, cambiaruna coordenada del vector b para que lo sean.
33. Con los vectores del ejercicio anterior, comprobar que (5a)× b = 5.(a× b).
34. Hallar el area del paralelogramo que tiene por lados los vectores a = (2, 1, 5) y b = (3, 4, 0).
35. Dados los vectores a = (2, 1, 0); b = (3, 5, 1) y c = (2, 4, 1), halla el producto mixto [a, b, c].
36. Calcula el volumen del paralelepıpedo que tiene por aristas los vectores: a = (3, 1, 2); b = (0, 5, 0) yc = (−1, 1, 0).
37. Dados los vectores u = (1, 1, 0) y v = (a, 1,−1), hallar a para que el angulo entre u y v sea 60◦.
38. Sabiendo que ABCD es un cuadrado A = (2, 0,√
2), B = (1, 1, 0) y C = (0, y, z), hallese razonadamentelas coordenadas que faltan de C.
39. Hallar las ecuaciones parametricas de la recta que pasa por el punto P0(1,−2, 4) y tiene a v = (2, 4,−4)como vector director.

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 20
40. Idem para la recta que pasa por los puntos P (−2, 1, 0) y Q(1, 3, 5).
41. Hallar el plano que pasa por el punto P (2, 1, 2) y tiene a i como vector director.
42. Idem, siendo P (3, 2, 2) y v = (2, 3− 1).
43. Hallar la ecuacion del plano que pasa por los puntos P (0, 0, 0), Q(1, 2, 3) y R(−2, 3, 3).
44. Hallar la ecuacion de la recta:
(a) que pasa por (−4, 3) y tiene pendiente 12 .
(b) que pasa por (0, 5) y tiene pendiente −2.
(c) que pase por los puntos (−2,−3) y (4, 2).
45. Hallar la ecuacion de la recta que pasa por (−2, 3) y es perpendicular a la recta 2x− 3y + 6 = 0.
46. Hallar la ecuacion de la recta que pasa por (2,−3) y es paralela a la recta que une los puntos (4, 1) y(−2, 2).
47. Demostrar, aplicando el concepto de pendiente, que los puntos A(8, 6), B(4, 8) y C(2, 4) son los verticesde un triangulo rectangulo.
48. Hallar los angulos interiores del triangulo cuyos vertices son A(−3,−2), B(2, 5) y C(4, 2).
49. Hallar la distancia desde la recta 8x + 15y − 24 = 0 al punto (−2− 3)
50. Hallar las ecuaciones de las rectas de pendiente −34
que formen con los ejes coordenados un triangulo dearea 24 unidades de superficie.
51. Sea R la resistencia electrica medida en ohmios de una pieza de alambre de cobre de diametro y longitudfijos a una temperatura de T grados centı grados. Suponiendo que la relacion entre R y T es lineal, ysabiendo que R = 0′0170 ohmios cuando T = 0o y R = 0′0245 ohmios cuando T = 100o, obtengase unaecuacion que exprese R en funcion de T .
52. En la escala F de Fahrenheit el agua se congela a los 32o y hierve a los 212o, mientras que en la escala Cde Celsius se congela a los 0o y hierve a los 100o (por tanto 32oF = 0oC y 212oF = 100oC). Demostrarque la relacion entre las dos escalas es
F =95C + 32.
¿Cuantos grados Celsius son 68oF? ¿Cuantos grados Fahrenheit son 70oC?
53. Una recta r pasa por A(5,−5, 7) y por el origen. Hallar las ecuaciones de una recta paralela a ella por elpunto P (1, 1,−1).
54. Estudiar la posicion relativa de las rectas:
r :x− 2
1=
y
6=
z + 12
; r′ :
x = −2λy = −12 + λz = −5 + 4λ.
55. Hallar las ecuaciones parametricas de un plano que pasa por el punto P(3,2,1) y contiene a la rectax = y = z + 6.
56. Hallar la ecuacion de un plano paralelo a π : 5x− y + 3z = 0 que pase por el punto Q(−12, 1, 4).
57. Estudiar la posicion relativa de los planos:
π : x− y + z − 1 = 0 y π′ : 2x− 2y + 2z = 3.

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 21
58. Hallar la posicion relativa de la recta r y el plano π, siendo
r :{
x− y + z = 1x + y − z = 0 π : 4x− 7y + 5z = 0.
59. Determinar la posicion relativa del plano 3x− 2y + z − 3 = 0 y la recta de ecuacion
x− 13
=y
2= z + 3.
60. Consideremos la recta r, el plano π y el punto P (1, 0, 4), siendo:
r :x− 1
2=
y + 83
=z − 2
5
π : 2x− y + 3z = 1
(a) Halla una recta s paralela a r que pase por el punto P.
(b) Calcula el punto de interseccion de r y π.
61. Hallar las coordenadas del centro y radio de la circunferencia x2 + y2 − 3x + 5y − 14 = 0.
62. Hallar la ecuacion de la circunferencia de centro (5,−2) y que pase por el punto (−1, 5).
63. Hallar la ecuacion de una circunferencia sabiendo que uno de sus diametros es el segmento que une lospuntos (5,−1) y (−3, 7).
64. Hallar la ecuacion de la circunferencia que pasa por los puntos (2, 3) y (−1, 1) y cuyo centro esta situadoen la recta x− 3y − 11 = 0.
65. Hallar la ecuacion de la elipse cuyos focos estan en el eje OX y su centro coincide con el origen decoordenadas, sabiendo ademas:
(a) Sus semiejes son iguales a 5 y a 2.
(b) Su eje mayor es 10 y la distancia entre los focos es 8.
(c) La distancia focal es 6 y la excentridad es 35
(d) Su eje mayor es 20 y la excentricidad es 35
66. Hallar la ecuacion de la elipse cuyos focos estan en el eje OY y su centro es el origen de coordenadas,sabiendo ademas:
(a) Sus semiejes son iguales a 7 y a 2.
(b) Su eje mayor es 10 y la distancia focal es 8.
(c) La distancia focal es 24 y la excentricidad es 1213
67. Verificar que cada una de las ecuaciones siguientes es una elipse y hallar las coordenadas del centro, lossemiejes y la excentricidad:
a) 5x2 + 9y2 − 30x + 18y + 9 = 0; b) 16x2 + 25y2 + 32x− 100y − 284 = 0.
68. La orbita de la Tierra es una elipse, con el Sol situado en uno de sus focos. La longitud del eje mayor es241.428.00 kilometros y la excentricidad 0′0167. Determinar las distancias de los extremos del eje mayoral Sol (estas son la mayor y la menor distancia de la Tierra al Sol).
69. Hallar la ecuacion de la parabola cuyo vertice esta en el origen de coordenadas, sabiendo ademas:

Fundamentos Matematicos de la Ingenierıa. (Tema 5) Hoja 22
(a) La parabola esta situada en el semiplano derecho, es simetrica respecto al eje OX y su parametro es3.
(b) Esta situada en el semiplano izquierdo, es simetrica respecto al eje OX y su parametro es 0,5.
(c) Esta situada en el semiplano superior, es simetrica respecto al eje OY y su parametro es14.
(d) Esta situada en el semiplano inferior, es simetrica respecto al eje OY y su parametro es 3.
70. Determinar el valor del parametro y la situacion de las parabolas siguientes con respecto a los ejes coor-denados.
a) y2 = 6x; b) x2 = 5y; c) y2 = −4x; c) x2 = −y.
71. Una antena para television por satelite es parabolica y tiene su receptor a 70 cm de su vertice. Encontrarla ecuacion de la seccion transversal de la antena (supongase que el vertice es el origen).
72. Hallar la ecuacion de la hiperbola cuyos focos estan situados en el eje OX y su centro coincide con elorigen de coordenadas, sabiendo ademas que
(a) Sus ejes son 10 y 8.
(b) La distancia focal es 10 y el eje imaginario 8.
(c) La distancia focal es 6 y la excentricidad es 32 .
73. Dadas las siguientes hiperbolas calcular el centro, los semiejes, los focos, la excentricidad y las ecuacionesde las asıntotas:
a) 16x2 − 9y2 = 144 b) 16x2 − 9y2 − 64x− 54y − 161 = 0.
74. Clasificar las conicas siguientes:
(a) x2 − y2 + x + 1 = 0
(b) x2 + 3x− y2 + 3y = 0
(c) 2x2 − y2 + 4y − 1 = 0
(d) 2x2 + y2 + 4y + 2 = 0