Introducción a los Sistemas de Control Discretos
7
Sistemas Discretos Los sistemas de control de ti empo discreto (STD) son sistemas dinámicos para los cuales una ó más de sus variables solamente son conocidas en ciertos instantes. Por lo tan to, son aquellos que manejan señales discretas, a dierencia de los sistemas de tiempo continuo (ST!) en los cuales sus variables son conocidas en todo momento. "n sistema en tiempo discreto como #a se mencionó anteriormente viene caracteri$ado por ma%nitudes que var&an solo en instantes espec&'cos de ti empo. stas ma%nitudes o señales en tiempo discreto r(k) toman valores r(t1), r(t2),… r(tn) . d emás de los sistemas in*erentemente discretos, se incl u# en tambi+n en esta cate%or&a los sistemas continuos muestreados con r(k) ormada por ntroducción al !ontrol r(t1), r(t2),… r(tn). jemplo de las señales continuas # discretas-
-
Upload
nicolas-palermo-rodriguez -
Category
Documents
-
view
11 -
download
0
description
Introducción a los Sistemas de Control Discretos
Transcript of Introducción a los Sistemas de Control Discretos
7/21/2019 Introducción a los Sistemas de Control Discretos
http://slidepdf.com/reader/full/introduccion-a-los-sistemas-de-control-discretos 1/7
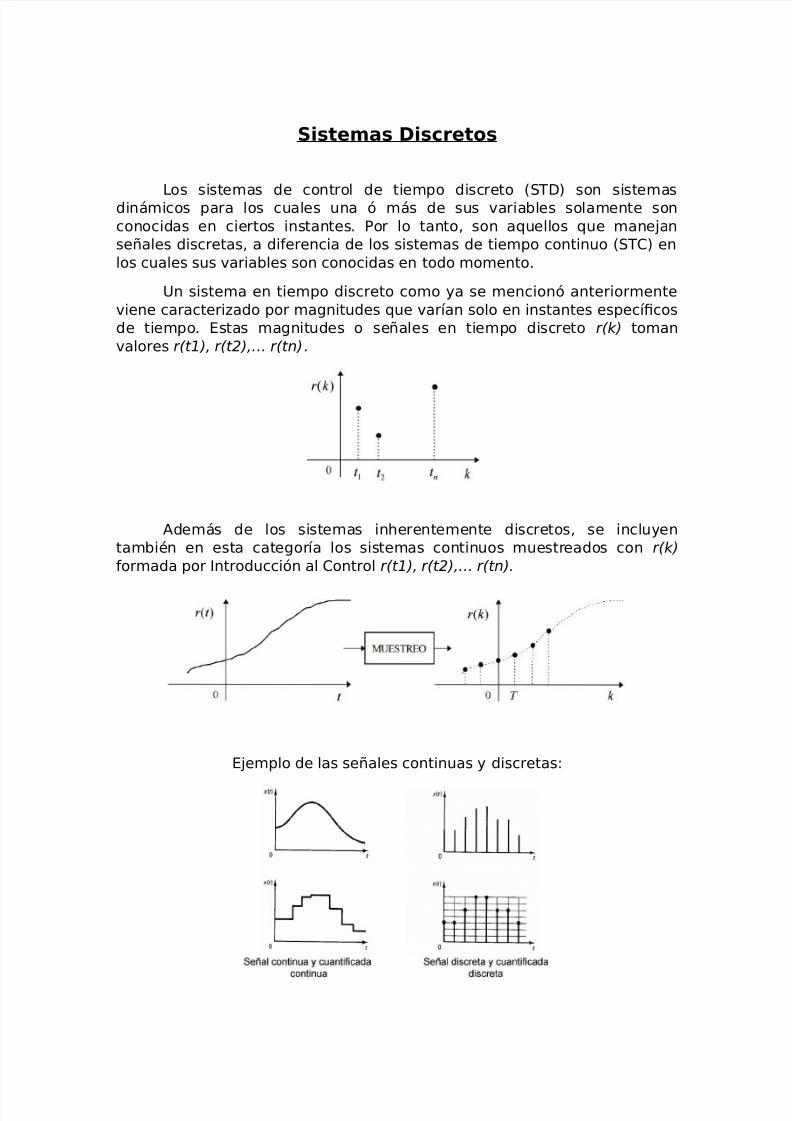
Sistemas Discretos
Los sistemas de control de tiempo discreto (STD) son sistemasdinámicos para los cuales una ó más de sus variables solamente sonconocidas en ciertos instantes. Por lo tanto, son aquellos que manejanseñales discretas, a di erencia de los sistemas de tiempo continuo (ST!) enlos cuales sus variables son conocidas en todo momento.
"n sistema en tiempo discreto como #a se mencionó anteriormenteviene caracteri$ado por ma%nitudes que var&an solo en instantes espec&'cosde tiempo. stas ma%nitudes o señales en tiempo discreto r(k) tomanvalores r(t1), r(t2),… r(tn) .
demás de los sistemas in*erentemente discretos, se inclu#entambi+n en esta cate%or&a los sistemas continuos muestreados con r(k)
ormada por ntroducción al !ontrol r(t1), r(t2),… r(tn).
jemplo de las señales continuas # discretas-
7/21/2019 Introducción a los Sistemas de Control Discretos
http://slidepdf.com/reader/full/introduccion-a-los-sistemas-de-control-discretos 2/7
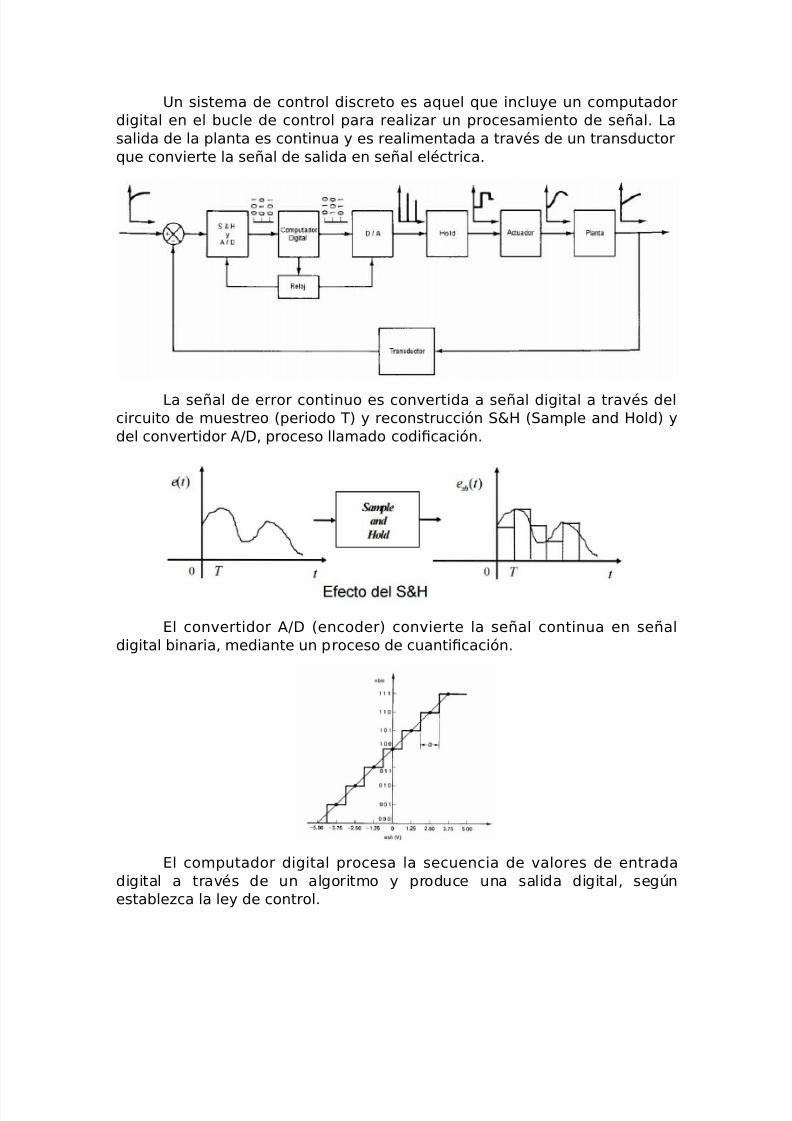
"n sistema de control discreto es aquel que inclu#e un computadordi%ital en el bucle de control para reali$ar un procesamiento de señal. Lasalida de la planta es continua # es realimentada a trav+s de un transductorque convierte la señal de salida en señal el+ctrica.
La señal de error continuo es convertida a señal di%ital a trav+s delcircuito de muestreo (periodo T) # reconstrucción S / (Sample and /old) #del convertidor 0D, proceso llamado codi'cación.
l convertidor 0D (encoder) convierte la señal continua en señaldi%ital binaria, mediante un proceso de cuanti'cación.
l computador di%ital procesa la secuencia de valores de entradadi%ital a trav+s de un al%oritmo # produce una salida di%ital, se%1nestable$ca la le# de control.
7/21/2019 Introducción a los Sistemas de Control Discretos
http://slidepdf.com/reader/full/introduccion-a-los-sistemas-de-control-discretos 3/7
7/21/2019 Introducción a los Sistemas de Control Discretos
http://slidepdf.com/reader/full/introduccion-a-los-sistemas-de-control-discretos 4/7
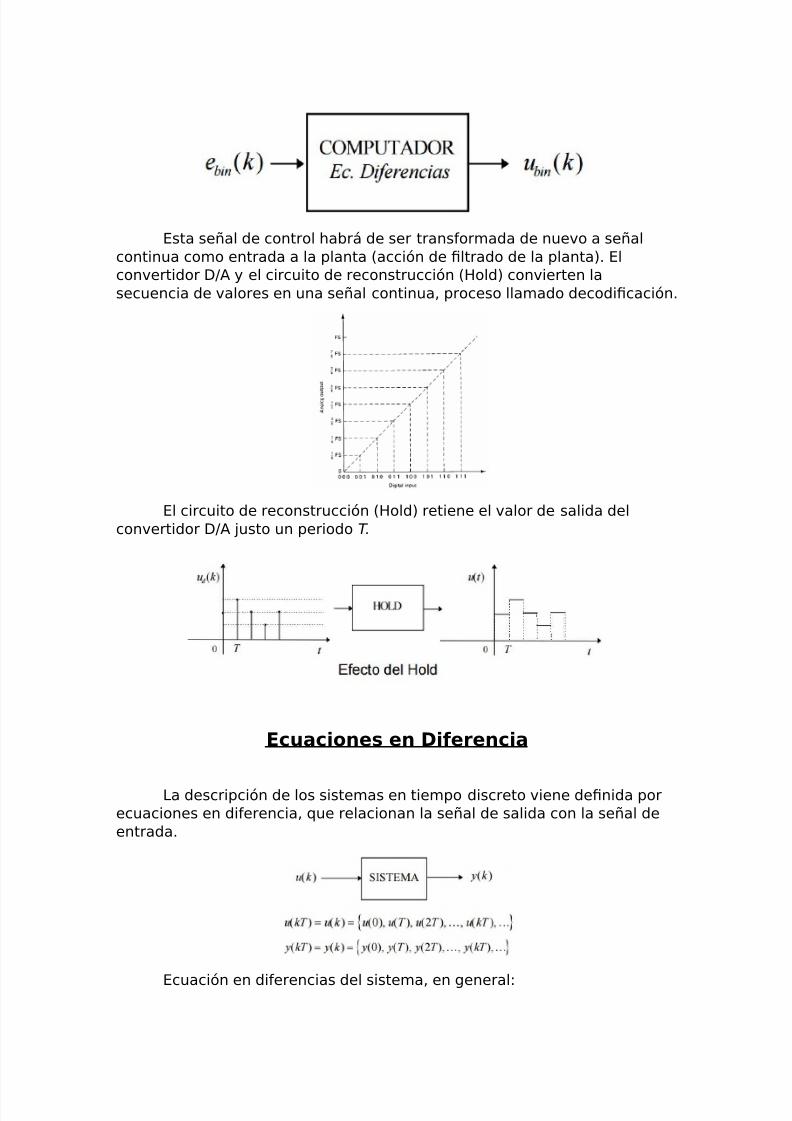
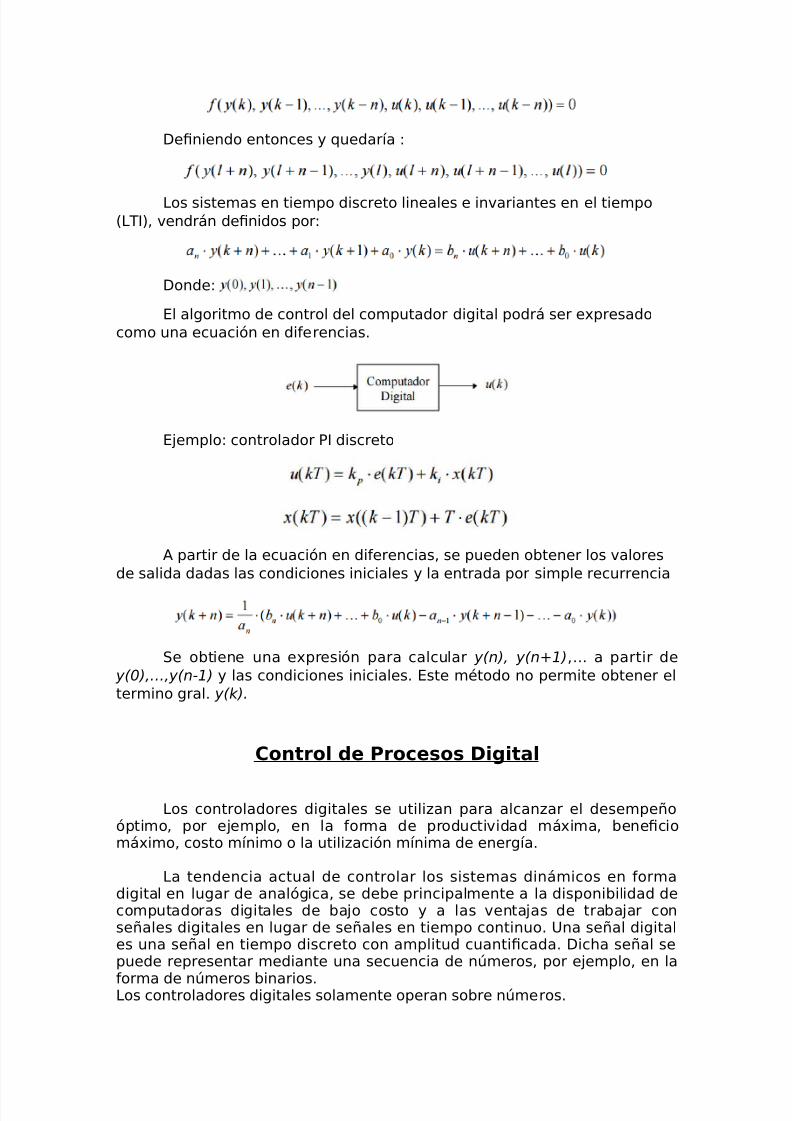
De'niendo entonces # quedar&a -
Los sistemas en tiempo discreto lineales e invariantes en el tiempo(LT ), vendrán de'nidos por-
Donde-
l al%oritmo de control del computador di%ital podrá ser e2presadocomo una ecuación en di erencias.
jemplo- controlador P discreto
partir de la ecuación en di erencias, se pueden obtener los valoresde salida dadas las condiciones iniciales # la entrada por simple recurrencia
Se obtiene una e2presión para calcular y(n), y(n+1) ,3 a partir de y(0),…,y(n-1) # las condiciones iniciales. ste m+todo no permite obtener eltermino %ral. y(k).
Control de Procesos Digital
Los controladores di%itales se utili$an para alcan$ar el desempeñoóptimo, por ejemplo, en la orma de productividad má2ima, bene'ciomá2imo, costo m&nimo o la utili$ación m&nima de ener%&a.
La tendencia actual de controlar los sistemas dinámicos en ormadi%ital en lu%ar de analó%ica, se debe principalmente a la disponibilidad decomputadoras di%itales de bajo costo # a las ventajas de trabajar conseñales di%itales en lu%ar de señales en tiempo continuo. "na señal di%itales una señal en tiempo discreto con amplitud cuanti'cada. Dic*a señal sepuede representar mediante una secuencia de n1meros, por ejemplo, en la
orma de n1meros binarios.Los controladores di%itales solamente operan sobre n1meros.
7/21/2019 Introducción a los Sistemas de Control Discretos
http://slidepdf.com/reader/full/introduccion-a-los-sistemas-de-control-discretos 5/7
La toma de decisiones es una de sus unciones importantes. stos amenudo se utili$an para resolver los problemas relacionados con laoperación %lobal óptima de plantas industriales.
Los controladores di%itales son mu# versátiles. 4stos pueden manejarecuaciones de control no lineales que involucran cálculos complicados uoperaciones ló%icas. Se puede utili$ar con controladores di%itales unavariedad muc*o más amplia de le#es de control que las que se pueden usarcon controladores analó%icos. Tambi+n en el controlador di%ital, mediante laedición de un nuevo pro%rama, las operaciones que se están ejecutando se
pueden cambiar por completo. sta caracter&stica es en particularimportante si el sistema de control va a recibir in ormación o instruccionesde operación desde al%1n centro de cálculo donde se *acen análisiseconómicos # estudios de optimi$ación.
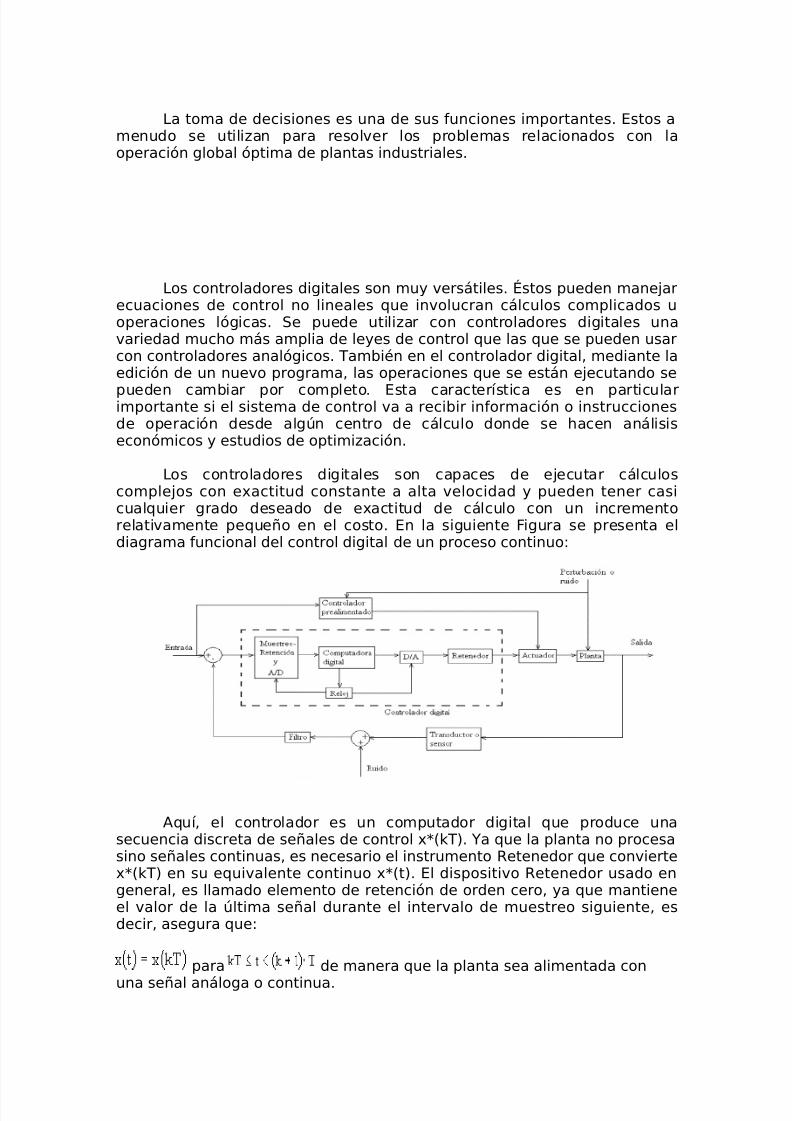
Los controladores di%itales son capaces de ejecutar cálculoscomplejos con e2actitud constante a alta velocidad # pueden tener casicualquier %rado deseado de e2actitud de cálculo con un incrementorelativamente pequeño en el costo. n la si%uiente 5i%ura se presenta eldia%rama uncional del control di%ital de un proceso continuo-
qu&, el controlador es un computador di%ital que produce unasecuencia discreta de señales de control 26(7T). 8a que la planta no procesasino señales continuas, es necesario el instrumento 9etenedor que convierte26(7T) en su equivalente continuo 26(t). l dispositivo 9etenedor usado en%eneral, es llamado elemento de retención de orden cero, #a que mantieneel valor de la 1ltima señal durante el intervalo de muestreo si%uiente, esdecir, ase%ura que-
para de manera que la planta sea alimentada conuna señal análo%a o continua.
7/21/2019 Introducción a los Sistemas de Control Discretos
http://slidepdf.com/reader/full/introduccion-a-los-sistemas-de-control-discretos 6/7
ndependientemente de la con'%uración interna del sistema decontrol di%ital, el controlador discreto pierde la in ormación entre muestras.Ló%icamente el tiempo de muestreo se esco%erá de manera que estap+rdida de in ormación no de%rade su comportamiento.
UNIVERSIDAD DE ORIENTE.
NÚCLEO DE ANZOÁTEGUI.
ESCUELA DE INGENIERÍA Y CIENCIAS APLICADAS.
DEPARTAMENTO DE COMPUTACIÓN Y SISTEMAS.
ASIGNATURA: SISTEMAS DE CONTROL DISCRETO
SECCIÓN: 01
SISTEMAS DECONTROL DISCRETO
7/21/2019 Introducción a los Sistemas de Control Discretos
http://slidepdf.com/reader/full/introduccion-a-los-sistemas-de-control-discretos 7/7
PROFESOR : BACHILLER:
ING. LUIS FELIPE ROJAS NICOLÁS PALERMO C.I: !."1#."$
BARCELONA, 31 DE AGOSTO DEL 2015