TEORÍA DE CONTROL - fi.mdp.edu.ar 5 - Sistemas Discretos.pdf · teoría de control sistemas...
31
TEORÍA DE CONTROL SISTEMAS DISCRETOS
Transcript of TEORÍA DE CONTROL - fi.mdp.edu.ar 5 - Sistemas Discretos.pdf · teoría de control sistemas...

TEORÍA DE CONTROL
SISTEMAS DISCRETOS

Teoría de Control
SISTEMAS DISCRETOS
ARQUITECTURA DE UN SISTEMA DE CONTROL DIGITAL

Teoría de Control
SISTEMAS DISCRETOS
TIPOS DE SEÑALES
TIEMPO CONTINUO
TIEMPO DISCRETO
ANALÓGICAS
CUANTIFICADAS
NO CUANTIFICADAS
DIGITALES
{
{

Teoría de Control
SISTEMAS DISCRETOS
TRANSFORMADA Z
0
)()()()(k
kzkTxkTxtxzX ZZ
0 tpara 0
0 tpara 1)(tx
ESCALÓN UNITARIO
1
321
1
1
1
1....1)(
zrzzzzX
ka
0k para 0
0k para a)(
k
kx 1
133221
1
1)(
....1)(
azzX
azrzazaazzX
1 2 3( ) (0) ( ) (2 ) (3 ) .... ( ) ....kX z x x T z x T z x T z x kT z

Teoría de Control
ate
0 tpara 0
0 tpara )(
-atetx
1
133221
1
1)(
....1)(
zezX
zerzezezezX
aT
aTaTaTaT
0 tpara 0
0 tparat )(tx
RAMPA UNITARIA
21
13211
321
1....4321
....32)(
z
TzzzzTz
TzTzTzzX
TRANSFORMADA Z
SISTEMAS DISCRETOS

Teoría de Control
TRANSFORMADA Z
PROPIEDADES
SISTEMAS DISCRETOS
( ) ( )a x t a X zZ
1
0( ) ( ) ( )
nn k
kx t nT z X z x kT zZ
( ) ( ) ( ) ( )a x t b y t a X z b Y zZ
1 ( ) ( )ka x t X a zZ
( ) ( )nx t nT z X zZ
Teorema del Valor Final
Teorema del Valor inicial
(0) lim ( )z
f F z
1( ) lim ( 1) ( )
zf z F z

Teoría de Control
RETENCIÓN DE ORDEN CERO
SISTEMAS DISCRETOS
( ) ( ) ( )
( ) escalón
y t u t u t T
u t
( ) 1 1 1ROC
( )
sTsTY s e
eR s s s s
1 1( ) ( )sTX s e G s
1
( ) 1( ) 1 ( )
( )
sTsTY s e
G s e G sR s s
1 0 1 0
0
( ) g ( ) ( )
t
x t g t g d t t T
1 1 1
0
( ) g ( )
t
x t t T g d t T
( ) respuesta al impulsoy t

Teoría de Control
RETENCIÓN DE ORDEN CERO
SISTEMAS DISCRETOS
1
1 1 1( ) ( ) ( )x t g t T z G zZ Z
1 1( ) ( )g t G zZ
1( ) ( )(1 )
( )
Y z G sz
R z sZ
1 1
( )( ) ( )
( )
sTY zG s e G s
R zZ
( ) 1( )
( )
sTY s eG s
R s s
1
1
( )(1 ) ( )
( )
Y zz G z
R z
1
1 1
( )( ) ( )
( )
Y zG z z G z
R z

Teoría de Control
MUESTREO MEDIANTE IMPULSOS
)(tx )(* tx
T
SISTEMAS DISCRETOS
*
0( ) ( ) ( )
kx t x kT t kT
* 2( ) (0) ( ) (2 ) ...sT sTX s x x T e x T e
*
0( ) ( ) ( ) con skT sT
kX s x kT e X z z e
*( ) (0) ( ) ( ) ( ) ...X s x t x T t TL L
0( ) ( )T kt kT t kT

Teoría de Control
La respuesta de y(t) es la suma de las respuestas al impulso
FUNCIÓN
TRANSFERENCIA
DE PULSO
SISTEMAS DISCRETOS
0
( ) ( ) ( ) k
ky t Y z y kT zZ
*
0( ) ( ) ( )
kx t x kT t kT
* *
0 0
( )
t t
y t g t x d x t g d
( ) (0) 0
( ) (0) ( ) ( ) T 2( )
...
( ) (0) ( ) ( ) ... ( ) ( ) ...
g t x t T
g t x g t T x T t Ty t
g t x g t T x T g t kT x kT kT t
1k T

Teoría de Control
SISTEMAS DISCRETOS
FUNCIÓN TRANSFERENCIA DE PULSO
0( ) ( ) ( )
hy t g t hT x hT
0( ) ( ) ( )
hy kT g kT hT x hT
( ) ( ) ( )*
y kT x kT g kT
0 0( ) ( ) ( ) k
k hY z g kT hT x hT z
m k h
0 0( ) ( ) ( ) m h
m hY z g mT x hT z
0( ) ( ) k
kY z y kT z
Sumatoria de Convolución
0 0( ) . -m -h
m hY z g(mT) z x(hT) z
( ) ( ). X(z)Y z G z

Teoría de Control
SISTEMAS DISCRETOS
SISTEMAS CON RETARDO
1( ) ( )(1 )
( )dsTY z G s
z eX z s
Z
1( ) ( )(1 )
( )
dT
TY z G s
z zX z s
Z
Si Td = N.T
1( ) ( )(1 )
( )
NY z G sz z
X z sZ

Teoría de Control
SISTEMAS DISCRETOS
TABLA DE TRANSFORMADA Z
Si bien la transformada Z se define en el dominio temporal existen tablas que permiten
transformar al plano Z expresiones representadas en el campo transformado de Laplace.

Teoría de Control
SISTEMAS DISCRETOS
EJEMPLO:
El siguientes diagrama representa un sistema muestreado de control. Obtenga una
expresión para la salida C(z) cuando se le aplica una entrada R(s) en forma de escalón
de amplitud unitaria.
E E*
V
C*
21212)11( **** GHCGGERGHCGERVRE
****** 2121 GHCGGERE
***** 21211 GHCRGGE

Teoría de Control
SISTEMAS DISCRETOS
EJEMPLO:E E*
V
C*
*
****
211
21
GG
GHCRE
32132132)11( **** GGHCGGGEGGHCGEC
***** 321321 GGHCGGGEC
***
*
**** 321321
211
21GGHCGGG
GG
GHCRC
***** 21211 GHCRGGE

Teoría de Control
SISTEMAS DISCRETOS
EJEMPLO:E E*
V
C*
*
*********
211
21132132121321
GG
GGGGHCGGGGHCGGGRC
********** 21132132121321211 GGGGHCGGGGHCGGGRGGC
******** 32121132132121211 GGGRGGGGHGGGGHGGC
*****
***
21132132121211
321
GGGGHGGGGHGG
GGGRC
)(211)(321)(321)(21)(211
)(321)()(
zGGzGGHzGGGzGHzGG
zGGGzRzC

Teoría de Control
2 1s
2 1s
Aliasing
Teorema del
muestreo
El teorema demuestra que la reconstrucción exacta de una
señal periódica continua en banda base a partir de sus
muestras, es matemáticamente posible si la señal está
limitada en banda y la tasa de muestreo es superior al doble
de su ancho de banda.
SISTEMAS DISCRETOS

Teoría de Control
FILTRO ANTI ALIASING
SISTEMAS DISCRETOS

Teoría de Control
)(1
)(
)(*
sGs
e
sU
sC sT
1( ) ( )( ) 1
( )
C z G sG z z
U z sZ
)()(1
)()(
)(
)(
zDzG
zDzG
zR
zC
SISTEMAS DISCRETOS
CONTROL DISCRETO
Teoría de Control
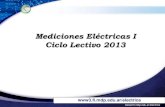
CORRESPONDENCIA ENTRE EL PLANO S Y EL PLANO Z
sTez js con
)2()( kTjTTjTTj eeeeez 1 Tez
SISTEMAS DISCRETOS

Teoría de Control
TjTTj eeez )(
CORRESPONDENCIA ENTRE EL PLANO S Y EL PLANO Z
SISTEMAS DISCRETOS

Teoría de Control
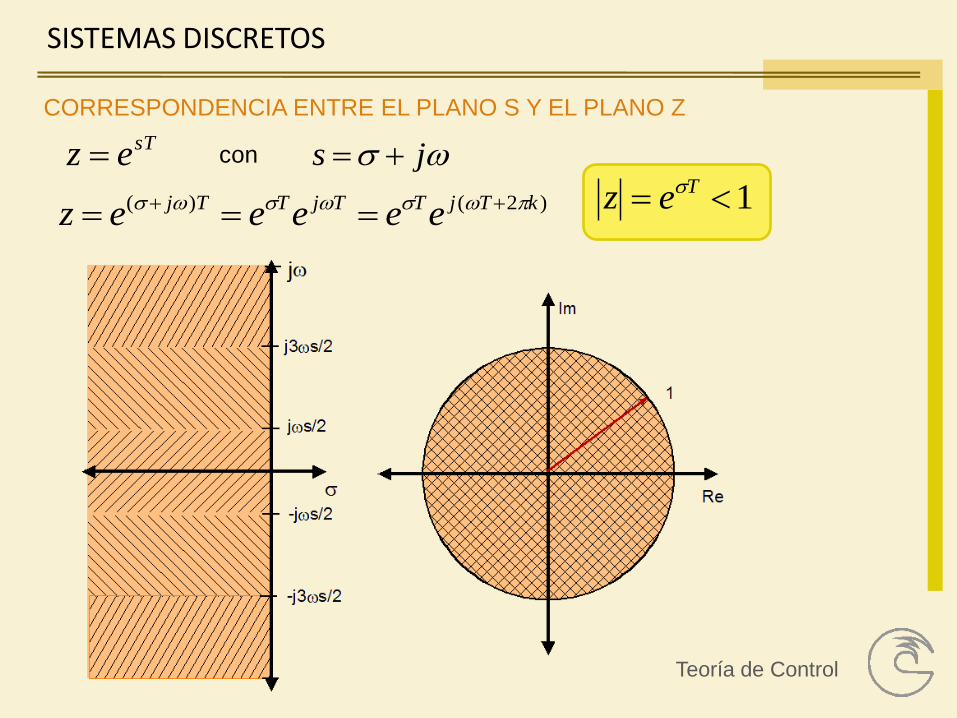
ANÁLISIS DE ESTABILIDAD
1( ) ( )( ) 1
( )
V z GH sGH z z
U z sZ
)(1
)(
)(
)(
zGH
zG
zR
zC
0)(1)( zGHzP
1 1
1
1)(
TH(s)
sssG
SISTEMAS DISCRETOS
1
2
1 1 1( ) (1 )
( 1)G z z
s s sZ
2
( 1)( )
( 1) ( 1) ( )T
z Tz z zG z
z z z z e
Teoría de Control
ANÁLISIS DE ESTABILIDAD
0 3679 0 7183( )
1 0 3679
, z+ ,G z
z - z - ,
2( ) 1 0 3679 0 3679 0 2642 0 6321P z z - z - , , z+ , z - z + ,
0,61820,5 0,61820,5 21 jzjz
10,7950919 21 zz ESTABLE
SISTEMAS DISCRETOS
2
2
( 1) ( 1)( 1)( )
( 1)
T T
T
z T z e z z e zzG z
z z z e
1 1( )
( 1)
T T T
T
z T e e TeG z
z z e

Teoría de Control
ANÁLISIS DE ESTABILIDAD
1 1
1)(
TH(s)
ss
KsG
0 3679 0 7183( )
1 0 3679
, K z+ ,G z
z - z - ,
K=1
K=2,39
SISTEMAS DISCRETOS

Teoría de Control
ANÁLISIS DE ESTABILIDAD
SISTEMAS DISCRETOS
1 1( )
( 1)
T T T
T
z T e e TeG z
z z e
( 1) 1 11 ( )
( 1)
T T T T
T
z z e z T e e TeG z
z z e
Si el periodo de muestreo T no es conocido
2 2 11 ( )
( 1)
T
T
z T z TeG z
z z e
Para T=3.923
2 1,923 0,92241 ( )
( 1) 0,01978
z zG z
z z
Y los ceros son z1= -0,91583 y z2= -1,00716

Teoría de Control
ANÁLISIS DE ESTABILIDAD
SISTEMAS DISCRETOS
2 2 11 ( )
( 1)
T
T
z T z TeG z
z z e

Teoría de Control
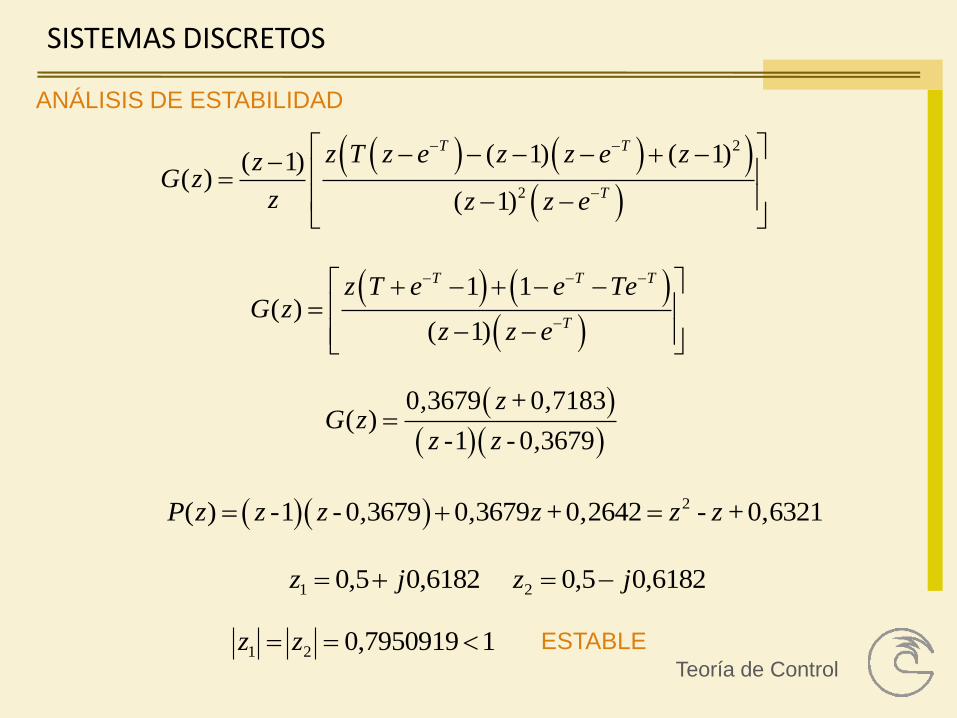
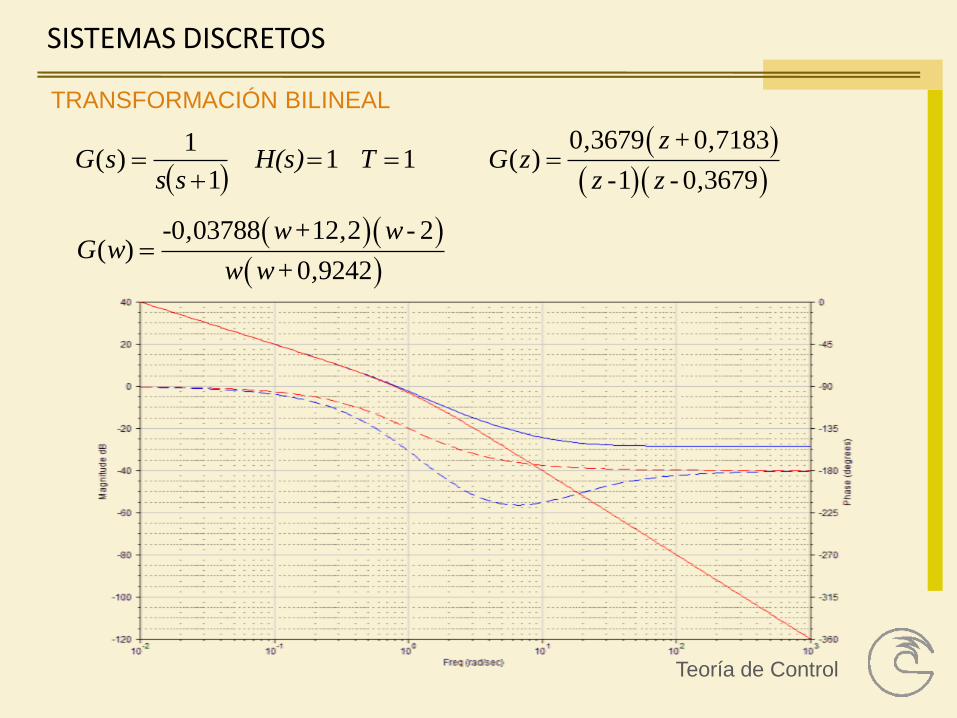
TRANSFORMACIÓN BILINEAL 1
12
z
z
Tw
21
21
wT
wT
z
jez 1
2cos
222
1
12
22
22
sen
Tj
ee
ee
Te
e
Tw
jj
jj
j
j
j
W
SISTEMAS DISCRETOS

Teoría de Control
www
T
Tjjw
2
2 1
2
T si
TRANSFORMACIÓN BILINEAL
Tj
js
sT eez
2
tan2
2cos
22 T
Tj
T
Tsen
Tjw
SISTEMAS DISCRETOS
1
12
z
z
Tw
0
5
10
15
20
25
30
35
0 0,2 0,4 0,6 0,8 1 1,2
w
2s
Teoría de Control
1 1
1
1)(
TH(s)
sssG
0 3679 0 7183( )
1 0 3679
, z+ ,G z
z - z - ,
0 03788 12 2 2( )
0 9242
- , w+ , w-G w
w w+ ,
SISTEMAS DISCRETOS
TRANSFORMACIÓN BILINEAL

Teoría de Control
APROXIMACIÓN DE LA RETENCIÓN DE ORDEN CERO
sj
s
s
ROC esen
TjG
)(
* 1( ) ( ) ( ) ( )ROC ROC s sG j GH j G j jn GH j jn
T
2*21
( ) ( ) ( )
2
s
sn
j T
ROC s
s
nsen
G j GH j T GH j jnnT
e
2/* )()()( Tj
ROC ejGHjGHjG
SISTEMAS DISCRETOS

Teoría de Control
APROXIMACIÓN DE LA RETENCIÓN DE ORDEN CERO
2/)( TjejGH
)(wGH
SISTEMAS DISCRETOS