Modulo Control Analogico-2
274
UNIVERSIDAD NACIONAL A ESCUELA DE CIENCIAS BASIC CONTENIDO DIDÁCTICO DE UNIVERSIDAD ESCUELA DE CI PROG 2 ING ABIERTA Y A DISTANCIA – UNAD CAS, TECNOLOGIA E INGENIERIA EL CURSO: 299005 – CONTROL ANALÓGICO D NACIONAL ABIERTA Y A D IENCIAS BASICAS, TECNOLOGIA E IN GRAMA DE INGENIERIA ELECTRONICA 299005 – CONTROL ANALOGICO ING. FABIAN BOLIVAR MARIN (Director Nacional) G. ANGEL ALEJANDRO RODRIGUEZ Acreditador NEIVA 2013 1 DISTANCIA NGENIERIA A
Transcript of Modulo Control Analogico-2

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERI A
PROGRAMA DE INGENIERIA ELECTRONICA
299005
ING.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERI A
PROGRAMA DE INGENIERIA ELECTRONICA
299005 – CONTROL ANALOGICO
ING. FABIAN BOLIVAR MARIN
(Director Nacional)
ING. ANGEL ALEJANDRO RODRIGUEZ
Acreditador
NEIVA
2013
1
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERI A
PROGRAMA DE INGENIERIA ELECTRONICA

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
ASPECTOS DE PROPIEDAD INTELECTUAL Y VERSIONAMIENTO
El presente módulo fue diseñado en el año Rodríguez Bermudez tutor
El presente módulo ha tenido oportunidades por el Ingeniero Harold Esneider Pérez Waltero en los años 2009 y 2010, quien ha sido tutor de la UNAD CEAD Ibagué en el progElectrónica y una tercera actualización realizada Marin quien actualmente se desempeña como director del curso a nivel nacional.
El material ha sido revisado por el Ingeniero Juan Olegario Monroy actualmente se desempeña como tutor en la UNAD CEAD Sogamoso.es acreditado por el Ing Angel Alejandro Rodriguez.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
ASPECTOS DE PROPIEDAD INTELECTUAL Y VERSIONAMIENTO
El presente módulo fue diseñado en el año 2006 por el Ingeniero Oscar Donaldo Rodríguez Bermudez tutor de la UNAD, ubicado en el CEAD de Pereira.
El presente módulo ha tenido tres actualizaciones desarrolladas enoportunidades por el Ingeniero Harold Esneider Pérez Waltero en los años 2009 y 2010, quien ha sido tutor de la UNAD CEAD Ibagué en el prog
y una tercera actualización realizada en el 2012 por el Ing. Fabian Bolivar tualmente se desempeña como director del curso a nivel nacional.
El material ha sido revisado por el Ingeniero Juan Olegario Monroy actualmente se desempeña como tutor en la UNAD CEAD Sogamoso.es acreditado por el Ing Angel Alejandro Rodriguez.
2
ASPECTOS DE PROPIEDAD INTELECTUAL Y VERSIONAMIENTO
el Ingeniero Oscar Donaldo Pereira.
actualizaciones desarrolladas en dos oportunidades por el Ingeniero Harold Esneider Pérez Waltero en los años 2009 y 2010, quien ha sido tutor de la UNAD CEAD Ibagué en el programa de Ingeniería
por el Ing. Fabian Bolivar tualmente se desempeña como director del curso a nivel nacional.
El material ha sido revisado por el Ingeniero Juan Olegario Monroy Vásquez quien actualmente se desempeña como tutor en la UNAD CEAD Sogamoso. Actualmente

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Los sistemas de control desempeñan un papel fundamental en los procesos
industriales modernos y h
decisivo en los grandes avances científicos y tecnológicos de la humanidad.
sistema es de control si la salida se controla de modo que pueda adoptar un valor o
cambio en particular de alguna ma
un recinto a un valor espec
central, mientras que una máquina herramienta se puede controlar para seguir una
trayectoria dada. En este curso
Sistemas de Control Análogo, incluyendo los elementos y términos utilizados para su
caracterización, y los criterios que debe
implementación.
El curso de Control Analóg
el programa de Ingeniería Electrónica, con dos créditos académicos, es Metodológico y
a distancia. Busca darle al estudiante la capacidad de describir de manera suficiente
las nociones, los conceptos y los procedimientos necesarios para el análisis y diseño
de sistemas de control continuo o análogo. Este curso es la puerta de entrada al
mundo del control automático tras haber estudiado los sistemas dinámicos. Le permite
al estudiante conocer las herramientas necesarias para el análisis y diseño de controles
en adelanto, en atraso, en adelanto y at
cualquiera de sus combinaciones o simplemente los controles proporcional integral
derivativo PID. El control automático es uno de los campos de aplicación de la
electrónica que ha influido de manera significativa en el desarrollo industrial, ya que
permite que las máquinas hagan tareas repetitivas con un alto grado de precisión
dentro de un proceso de pro
pueda controlar procesos que antes parecían imposibles (
precisión de micras, fabricación de microchips de alta escala de integraci
armas a distancia, entre otros).
u n i d a d presenta los sistemas de control y su modelamiento matemático junto con el
álgebra de bloques y el concepto de polos y ceros y su relación con la estabilidad
relativa del sistema; la
sistemas de control P , P I , PD y P ID y e l aná l i s i s de los s i s temas en la
f recuenc ia y en el espaci
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
INTRODUCCIÓN
Los sistemas de control desempeñan un papel fundamental en los procesos
industriales modernos y han sido desde la primera revolución industrial, un factor
decisivo en los grandes avances científicos y tecnológicos de la humanidad.
sistema es de control si la salida se controla de modo que pueda adoptar un valor o
cambio en particular de alguna manera definida. Así, para controlar la temperatura en
un recinto a un valor específico, se diseña un Sistema de Control de calefacción
central, mientras que una máquina herramienta se puede controlar para seguir una
En este curso examinaremos las principales características de los
Sistemas de Control Análogo, incluyendo los elementos y términos utilizados para su
caracterización, y los criterios que deben tenerse en cuenta para su análisis, diseño e
Analógico es del Campo de Formación Profesional E
el programa de Ingeniería Electrónica, con dos créditos académicos, es Metodológico y
a distancia. Busca darle al estudiante la capacidad de describir de manera suficiente
s conceptos y los procedimientos necesarios para el análisis y diseño
de sistemas de control continuo o análogo. Este curso es la puerta de entrada al
mundo del control automático tras haber estudiado los sistemas dinámicos. Le permite
er las herramientas necesarias para el análisis y diseño de controles
en adelanto, en atraso, en adelanto y atraso, proporcional, derivado e i
cualquiera de sus combinaciones o simplemente los controles proporcional integral
control automático es uno de los campos de aplicación de la
electrónica que ha influido de manera significativa en el desarrollo industrial, ya que
permite que las máquinas hagan tareas repetitivas con un alto grado de precisión
dentro de un proceso de producción industrial. Además ha permitido que el hombre
pueda controlar procesos que antes parecían imposibles (fabricación de piezas con
precisión de micras, fabricación de microchips de alta escala de integraci
, entre otros). El curso consiste de dos Unidades
los sistemas de control y su modelamiento matemático junto con el
álgebra de bloques y el concepto de polos y ceros y su relación con la estabilidad
segunda unidad nos presenta el análisi
P , P I , PD y PID y e l aná l is i s de los s i s temas en la
espacio de estados. El enfoque para el aprendizaje autónomo
3
Los sistemas de control desempeñan un papel fundamental en los procesos
an sido desde la primera revolución industrial, un factor
decisivo en los grandes avances científicos y tecnológicos de la humanidad. Un
sistema es de control si la salida se controla de modo que pueda adoptar un valor o
nera definida. Así, para controlar la temperatura en
fico, se diseña un Sistema de Control de calefacción
central, mientras que una máquina herramienta se puede controlar para seguir una
examinaremos las principales características de los
Sistemas de Control Análogo, incluyendo los elementos y términos utilizados para su
tenerse en cuenta para su análisis, diseño e
Campo de Formación Profesional Específica para
el programa de Ingeniería Electrónica, con dos créditos académicos, es Metodológico y
a distancia. Busca darle al estudiante la capacidad de describir de manera suficiente
s conceptos y los procedimientos necesarios para el análisis y diseño
de sistemas de control continuo o análogo. Este curso es la puerta de entrada al
mundo del control automático tras haber estudiado los sistemas dinámicos. Le permite
er las herramientas necesarias para el análisis y diseño de controles
raso, proporcional, derivado e integral o
cualquiera de sus combinaciones o simplemente los controles proporcional integral
control automático es uno de los campos de aplicación de la
electrónica que ha influido de manera significativa en el desarrollo industrial, ya que
permite que las máquinas hagan tareas repetitivas con un alto grado de precisión
ducción industrial. Además ha permitido que el hombre
abricación de piezas con
precisión de micras, fabricación de microchips de alta escala de integración, controlar
Unidades, l a p r i m e r a
los sistemas de control y su modelamiento matemático junto con el
álgebra de bloques y el concepto de polos y ceros y su relación con la estabilidad
análisis y diseño de
P , P I , PD y P ID y e l aná l is i s de los s i s temas en la
. El enfoque para el aprendizaje autónomo

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
de este curso es del tipo teórico
práctica por medio de talleres diseñados para tal fin, d
pueda depurar su conocimiento y dominio del tema por medio de su aplicación
inmediata. Inicialmente el estudiante simulará la respuesta de un sistema a entradas
predeterminadas (escalón unitario y rampa unitaria) usando MATLAB, luego en
laboratorio en la medida de los recursos disponibles
amplificadores operacionales, las cuales serán controladas mediante sistemas
diseñados con base en la respuesta en frecuencia y sistemas de control PID. Luego a
estos sistemas se les inyectarán perturbaciones para ser controlados en el espacio de
estados mediante la adición de polos. Este enfoque será gracias al estudio
independiente con actividades de trabajo personal y del trabajo en pequeños grupos
colaborativos de aprendizaje, y al acompañamiento tutorial desarrollado
virtual haciendo uso de los recursos tecnológicos disponibles
fomentar la cultura investigativa y de lectura en el estudiante a través del uso de
tecnologías que faciliten el
bibliográficas, de manera que fortalezca su aprendizaje autónomo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
de este curso es del tipo teórico-práctico, en donde la teoría es fácilmente llevada a la
alleres diseñados para tal fin, de tal manera
pueda depurar su conocimiento y dominio del tema por medio de su aplicación
inmediata. Inicialmente el estudiante simulará la respuesta de un sistema a entradas
predeterminadas (escalón unitario y rampa unitaria) usando MATLAB, luego en
en la medida de los recursos disponibles se simulará
amplificadores operacionales, las cuales serán controladas mediante sistemas
diseñados con base en la respuesta en frecuencia y sistemas de control PID. Luego a
stemas se les inyectarán perturbaciones para ser controlados en el espacio de
estados mediante la adición de polos. Este enfoque será gracias al estudio
independiente con actividades de trabajo personal y del trabajo en pequeños grupos
rendizaje, y al acompañamiento tutorial desarrollado
virtual haciendo uso de los recursos tecnológicos disponibles
fomentar la cultura investigativa y de lectura en el estudiante a través del uso de
tecnologías que faciliten el acceso a la información y la obtención de fuentes
bibliográficas, de manera que fortalezca su aprendizaje autónomo.
4
fácilmente llevada a la
e tal manera que el estudiante
pueda depurar su conocimiento y dominio del tema por medio de su aplicación
inmediata. Inicialmente el estudiante simulará la respuesta de un sistema a entradas
predeterminadas (escalón unitario y rampa unitaria) usando MATLAB, luego en el
se simularán plantas mediante
amplificadores operacionales, las cuales serán controladas mediante sistemas
diseñados con base en la respuesta en frecuencia y sistemas de control PID. Luego a
stemas se les inyectarán perturbaciones para ser controlados en el espacio de
estados mediante la adición de polos. Este enfoque será gracias al estudio
independiente con actividades de trabajo personal y del trabajo en pequeños grupos
rendizaje, y al acompañamiento tutorial desarrollado en campus
virtual haciendo uso de los recursos tecnológicos disponibles. Así mismo busca
fomentar la cultura investigativa y de lectura en el estudiante a través del uso de
acceso a la información y la obtención de fuentes
bibliográficas, de manera que fortalezca su aprendizaje autónomo.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
UNIDAD 1. ANALISIS Y DISEÑO DE SISTEMAS DE CONTROL DE UNA ENTRADA-UNA SALIDA……………………………………………………
CAPITULO 1: SISTEMAS DE CONTROL Y SU MODELAMIENTO MATEMATICO……………………………………………………………
Lección 1: Sistemas de Control……………………………… Lección 2: Elementos básicos en un Sistema de Control en lazo abierto y lazo cerrado……………………………………………… Lección 3: Estrategias de Control……… Lección 4: Modelos matemáticos de los sistemas de control Lección 5:modelamiento de un sistema……………………………………
CAPITULO 2: DIAGRAMAS DE BLOQUES Y ERROR EN ESTADO ESTABLE EN SISTEMAS DE CONTROL
Lección 1: Diagrama de bloques………………………………… Lección 2: Simplificación de diagramas de bloque…………… Lección 3: Ejemplos de sistemas……………………………… Lección 4: Error en estado estable…………………………… Lección 5: Error en estado estable ante diferentes entradas
CAPITULO 3: POLOS Y CEROS Y SU DEL SISTEMA……………………………………………………………
Lección 1: Que es la estabilidad……………………………… Lección 2: Patrón de polos y ceros…………………………… Lección 3: Estabilidad y polos…………………………………… Lección4: El criterio de estabilid Lección 5: Estabilidad Relativa…………………………………
FUENTES DOCUMENTALES
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
INDICE DE CONTENIDO
ANALISIS Y DISEÑO DE SISTEMAS DE CONTROL DE UNA ……………………………………………………
SISTEMAS DE CONTROL Y SU MODELAMIENTO ……………………………………………………………
Sistemas de Control………………………………
Elementos básicos en un Sistema de Control en lazo abierto y lazo cerrado………………………………………………
Estrategias de Control……….…………………
Modelos matemáticos de los sistemas de control
5: Efectos de las perturbaciones y estabilidad en el modelamiento de un sistema……………………………………
DIAGRAMAS DE BLOQUES Y ERROR EN ESTADO ESTABLE EN SISTEMAS DE CONTROL……………………………………
Diagrama de bloques…………………………………
Simplificación de diagramas de bloque……………
Ejemplos de sistemas………………………………
Error en estado estable……………………………
Error en estado estable ante diferentes entradas
POLOS Y CEROS Y SU RELACION CON LA ESTABILIDAD ……………………………………………………………
Que es la estabilidad………………………………
Patrón de polos y ceros……………………………
Estabilidad y polos……………………………………
El criterio de estabilidad de ROUTH – HURWITZ
Estabilidad Relativa…………………………………
DOCUMENTALES ........................................................................
5
Pág.
ANALISIS Y DISEÑO DE SISTEMAS DE CONTROL DE UNA ………………………………………………………… 7
SISTEMAS DE CONTROL Y SU MODELAMIENTO …………………………………………………………….. 9
Sistemas de Control……………………………… …. 9
Elementos básicos en un Sistema de Control en lazo abierto y lazo cerrado……………………………………………………… 13
……………………… 24
Modelos matemáticos de los sistemas de control.. 26
Efectos de las perturbaciones y estabilidad en el modelamiento de un sistema…………………………………….. 37
DIAGRAMAS DE BLOQUES Y ERROR EN ESTADO ESTABLE ………………………………………….. 45
Diagrama de bloques………………………………… 45
Simplificación de diagramas de bloque…………… 55
Ejemplos de sistemas………………………………. 64
Error en estado estable…………………………….. 74
Error en estado estable ante diferentes entradas… 81
RELACION CON LA ESTABILIDAD …………………………………………………………….. 92
Que es la estabilidad……………………………….. 92
Patrón de polos y ceros…………………………….. 97
Estabilidad y polos…………………………………… 99
HURWITZ… 105
Estabilidad Relativa………………………………….. 115
........................................................................ 117

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
UNIDAD 2. DISEÑO E IMPLEMENTACION DE SISTEMAS DE CONTROL…………………………………………………………………………...
CAPITULO 4 : DISEÑO DE SISTEMAS DE CONTROLADORES PID……………………………………………………………………………
Lección 1: Controladores P Lección 2: Control PID.……………………………………………… Lección 3: Reglas de sintonía de controladores PID………… Lección 4: Compensación…….. Lección 5: Implementación de las Leyes de Control…
CAPITULO 5: ANALISISRESPUESTA EN FRECUENCIA
Lección 1: Respuesta en Frecuencia… Lección 2: Trazas de Bode…. Lección 3: Diseño mediante Compensación...
Lección 4: Diagramas de Nyquist Lección 5: Criterio de estabilidad de Nyquist
CAPITULO 6: ANALISIS EN ESPACIO DE ESTADOSLección 1: Variables de estado…………………………………… Lección 2: Sistemas Lineales……………………………………… Lección 3: Controlabilidad y Observabilidad……………………… Lección4: estados………………………………………………………………… Lección 5: Diseño del Estimador y el Regulador…………………
FUENTES DOCUMENTALES
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
DISEÑO E IMPLEMENTACION DE SISTEMAS DE …………………………………………………………………………...
: DISEÑO DE SISTEMAS DE CONTROLADORES ……………………………………………………………………………
Controladores Proporcionales..…………………….....
Control PID.………………………………………………
Reglas de sintonía de controladores PID…………
Compensación……..……………..............................
Implementación de las Leyes de Control…
ANALISIS DE SISTEMAS DE CONTROL MEDIANTE LA RESPUESTA EN FRECUENCIA………………………………………......
Respuesta en Frecuencia……………………………
Trazas de Bode….………………………………
Diseño mediante Compensación.................................
Diagramas de Nyquist…………………………….……
Criterio de estabilidad de Nyquist………..
ANALISIS EN ESPACIO DE ESTADOS…………………Variables de estado……………………………………
Sistemas Lineales………………………………………
Controlabilidad y Observabilidad………………………
Diseño de Sistemas de Control en el espacio de estados…………………………………………………………………
Diseño del Estimador y el Regulador…………………
FUENTES DOCUMENTALES………………………………………………………
6
DISEÑO E IMPLEMENTACION DE SISTEMAS DE …………………………………………………………………………..... 118
: DISEÑO DE SISTEMAS DE CONTROLADORES …………………………………………………………………………….. 120
roporcionales..……………………..... 121
Control PID.……………………………………………… 136
Reglas de sintonía de controladores PID…………… 139
…………….............................. 148
Implementación de las Leyes de Control…………… 150
DE SISTEMAS DE CONTROL MEDIANTE LA ………………………………………...... 156
………………………….. 157
……………………………………. 171
...................... 190
………………….……. 192
…..……………. 199
…………………. 207 Variables de estado……………………………………. 207
Sistemas Lineales………………………………………. 208
Controlabilidad y Observabilidad……………………… 211
Diseño de Sistemas de Control en el espacio de estados………………………………………………………………… 234
Diseño del Estimador y el Regulador………………… 250
…………………………………………………… 274

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Nombre de la Unidad
ANALISIS Y DISEÑO DE SISTEMAS DE CONTROL DE UNA ENTRADA
Introducción Un Sistema de Control puede ser definido como el medio a través del cual una cantidad o una máde acuerdo con un patrón de comportamiento deseado.
En todo PLANTA, es decir la mácontrolado. Asociados con la planta están los actuadores, encargados de modificar su comportamiento o características, y los sensores encargados de describir su comportamiento mediante señales eléctricas, neumáticas o de otro tipo. planta tiene v
�
�
�
Para evitar que todo esto suceda, y garantizar que una planta se comporte de la manera deseada, es necesario incorporaun Sistema de Control; el cual cumple la función de permitir que la variable o variables de salida reguladas (posición, velocidad, temperatura, presión, etc) sigan una señal de referencia, por ejemplo un punto de trabajo (set point) de un horno eléc
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
UNIDAD 1
ANALISIS Y DISEÑO DE SISTEMAS DE CONTROL DE UNA ENTRADA-UNA SALIDA
Un Sistema de Control puede ser definido como el medio a través del cual una cantidad o variable cualquiera de interés en una máquina, mecanismo o proceso, es mantenido o alterado de acuerdo con un patrón de comportamiento deseado.
En todo sistema de control, el foco central de atencPLANTA, es decir la máquina, mecanismo o proceso acontrolado. Asociados con la planta están los actuadores, encargados de modificar su comportamiento o características, y los sensores encargados de describir su comportamiento mediante señales eléctricas, neumáticas o de otro tipo. planta tiene varias características importantes:
� Puede no trabajar como se desea si se deja a su libre comportamiento, a esto se le llama “Lazo abierto” o sin realimentación. Por ejemplo, el motor de una centrifugadora podría tener una velocidad de giro uniforme o podrían no conservarse las condiciones de presión y temperatura requeridas para el óptimo funcionamiento de una caldera.
� Puede estar sometida a perturbaciones externas que no están bajo el control del usuario; por ejemplo, torques de carga sobre un motor, tormentas de viento sobre un avión, baches en la carretera sobre un automóvil, etc.
� Puede ser monitoreada defectuosamente debido a la presencia de señales de ruido que afectan las mediciones de los sensores. Esto podría ocasionar, por ejemplo, lecturas incorrectas de concentración de impurezas en una planta de tratamiento de aguas o mediciones incorrectas en los instrumentos de un avión.
Para evitar que todo esto suceda, y garantizar que una planta se comporte de la manera deseada, es necesario incorporaun Sistema de Control; el cual cumple la función de permitir que la variable o variables de salida reguladas (posición, velocidad, temperatura, presión, etc) sigan una señal de referencia, por ejemplo un punto de trabajo (set point) de un horno eléc
7
ANALISIS Y DISEÑO DE SISTEMAS DE CONTROL DE UNA
Un Sistema de Control puede ser definido como el medio a cualquiera de interés en
quina, mecanismo o proceso, es mantenido o alterado de acuerdo con un patrón de comportamiento deseado.
ontrol, el foco central de atención es la quina, mecanismo o proceso a ser
controlado. Asociados con la planta están los actuadores, encargados de modificar su comportamiento o características, y los sensores encargados de describir su comportamiento mediante señales eléctricas, neumáticas o de otro tipo. La
arias características importantes:
Puede no trabajar como se desea si se deja a su libre comportamiento, a esto se le llama “Lazo abierto” o sin realimentación. Por ejemplo, el motor de una
una velocidad de giro podrían no conservarse las condiciones de
presión y temperatura requeridas para el óptimo
Puede estar sometida a perturbaciones externas que no están bajo el control del usuario; por ejemplo, torques de
tormentas de viento sobre un avión, baches en la carretera sobre un automóvil, etc. Puede ser monitoreada defectuosamente debido a la presencia de señales de ruido que afectan las mediciones de los sensores. Esto podría ocasionar, por
correctas de concentración de impurezas en una planta de tratamiento de aguas o mediciones incorrectas en los instrumentos de un avión.
Para evitar que todo esto suceda, y garantizar que una planta se comporte de la manera deseada, es necesario incorporarla a un Sistema de Control; el cual cumple la función de permitir que la variable o variables de salida reguladas (posición, velocidad, temperatura, presión, etc) sigan una señal de referencia, por ejemplo un punto de trabajo (set point) de un horno eléctrico.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Justificación La automatización y cprofundización de la Ingeniería Electrónica; en los sectores productivaltos grados de eficiencia y eficaciahacemos consideración de aquellos entradael análisis, diseño e implementación de sistemas de control automático.
Intencionalidades Formativas
En esta básicos para interpretar el concepto de Sistemas de Control, su modelamiento matemático, los aspectos relacionados con la estabilidad y su importancia en el sector industrial donde se aplican.
Denominación de capítulos
Capitulo Uno: MODELAMIENTO MATEMATICO.Capitulo Dos: ESTADO ESTABLECapitulo Tres: ESTABILIDAD DEL SISTEMA.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
La automatización y control es una de las líneas de profundización de la Ingeniería Electrónica; en los sectores productivos de la economía mundial se requiere altos grados de eficiencia y eficacia. Para esta primera uhacemos consideración de aquellos sistemas de control de una entrada-una salida, definiendo los aspectos más importantes en el análisis, diseño e implementación de sistemas de control automático. En esta unidad el estudiante debe adquirir los conocimientos básicos para interpretar el concepto de Sistemas de Control, su modelamiento matemático, los aspectos relacionados con la estabilidad y su importancia en el sector industrial donde se aplican. Capitulo Uno: SISTEMAS DE CONTROL Y MODELAMIENTO MATEMATICO. Capitulo Dos: DIAGRAMAS DE BLOQUEESTADO ESTABLE EN SISTEMAS DE CONTROLCapitulo Tres: POLOS Y CEROS Y SU RELACION CON LA ESTABILIDAD DEL SISTEMA.
8
ontrol es una de las líneas de profundización de la Ingeniería Electrónica; en los sectores
se requiere para lograr . Para esta primera unidad
istemas de control de una una salida, definiendo los aspectos más importantes en
el análisis, diseño e implementación de sistemas de control
estudiante debe adquirir los conocimientos básicos para interpretar el concepto de Sistemas de Control, su modelamiento matemático, los aspectos relacionados con la estabilidad y su importancia en el sector industrial donde se
SISTEMAS DE CONTROL Y SU
DIAGRAMAS DE BLOQUE S Y ERROR EN EN SISTEMAS DE CONTROL.
POLOS Y CEROS Y SU RELACION CON LA

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
CAPITULO 1: SISTEMAS DE CONTROL Y Introducción
En esta unidad analizamos en detalle los aspectos básicos pero fundamentales en los Sistemas Automáticos de Control; partimos de definir lo que es un sistema de control tanto en lazo abierto cconstituyen al igual que las estrategias de control. Un aspecto muy importante en el estudio del control automáticque se desea automatizar debe ser modaspecto debe ser bien estudiado, pues modelar un sistema real matemáticamente no es fácil; por esta razón en este capítulo abordamos el tema con bastante detalle y de forma clara.
Lección 1: SISTEMAS DE CONTROL.
1.1 Sistemas.
Figura 1 Sistemas: a) una estaci
El término sistema se emplea para describir un conjunto de compointeractúan, alrededor de los cuales se dibuja una frontera imaginaria de modo sólo es de interés la interacción entre la ennecesidad de estudiar en deforman. Así, el aspecto importante en un sistema es la relación entre las entradalas salidas. Un sistema puede ser una estación de generación de enerquizá sólo un motor eléctrico. No importa qué tan complejo sea un conjunto de componentes y sus interacciones denestán dentro de una caja negra y sólo tener en cuenta las entradas y sacaja. La figura 1 muestra cómo es posible representar un sistema mecon las entradas y las salidas al sistema indicadas por líneas con flechas, en las que la dirección de la flecha hace referencia ya sea a una entrfigura 1a ilustra el sistema de la estación de combustible y su salida de electricidadentrada de potencia eléctrica y su salida movimiento
La ventaja de estudiar los sistemas de esta manera es que aunque existe una amplia variedad de sistemas posibles, la relación entre la salida y la entrada de muchos sistemas tiende a ser similar. formado por un capacitor en serie con un resistor tiene el mismo tipo de relación que la respuesta de un contenedor de
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
SISTEMAS DE CONTROL Y SU MODELAMIENTO MATEMATICO
nidad analizamos en detalle los aspectos básicos pero fundamentales en los Sistemas Automáticos de Control; partimos de definir lo que es un sistema de control tanto en lazo abierto como en lazo cerrado y los elementos básicos que lo constituyen al igual que las estrategias de control. Un aspecto muy importante en el estudio del control automático es el modelamiento matemático;que se desea automatizar debe ser modelado matemáticamente, por lo tanto este aspecto debe ser bien estudiado, pues modelar un sistema real matemáticamente no es fácil; por esta razón en este capítulo abordamos el tema con bastante detalle y de
SISTEMAS DE CONTROL.
b) Sistemas: a) una estación de generación de energía, b) un motor el
se emplea para describir un conjunto de compointeractúan, alrededor de los cuales se dibuja una frontera imaginaria de modo sólo es de interés la interacción entre la entrada o entradas y su salida o salidas, sin necesidad de estudiar en detalle las interacciones entre los componentes que lo
el aspecto importante en un sistema es la relación entre las entradalas salidas. Un sistema puede ser una estación de generación de enerquizá sólo un motor eléctrico. No importa qué tan complejo sea un conjunto de componentes y sus interacciones dentro del sistema; se puede considerar que todos
entro de una caja negra y sólo tener en cuenta las entradas y sa1 muestra cómo es posible representar un sistema me
con las entradas y las salidas al sistema indicadas por líneas con flechas, en las que cción de la flecha hace referencia ya sea a una entrada o a una salida. La 1a ilustra el sistema de la estación de generación de energía con su entrada de
ble y su salida de electricidad. La figura 1b ilustra un motor eléctria de potencia eléctrica y su salida movimiento mecánico.
La ventaja de estudiar los sistemas de esta manera es que aunque existe una amplia variedad de sistemas posibles, la relación entre la salida y la entrada de muchos sistemas tiende a ser similar. Así, por ejemplo, la respuesta de un sistema eléctrico
tor en serie con un resistor a la aplicación súbita de un voltaje tiene el mismo tipo de relación que la respuesta de un contenedor de
9
SU MODELAMIENTO MATEMATICO
nidad analizamos en detalle los aspectos básicos pero fundamentales en los Sistemas Automáticos de Control; partimos de definir lo que es un sistema de
omo en lazo cerrado y los elementos básicos que lo constituyen al igual que las estrategias de control. Un aspecto muy importante en el
o es el modelamiento matemático; cualquier sistema elado matemáticamente, por lo tanto este
aspecto debe ser bien estudiado, pues modelar un sistema real matemáticamente no es fácil; por esta razón en este capítulo abordamos el tema con bastante detalle y de
un motor eléctrico.
se emplea para describir un conjunto de componentes que interactúan, alrededor de los cuales se dibuja una frontera imaginaria de modo que
trada o entradas y su salida o salidas, sin talle las interacciones entre los componentes que lo
el aspecto importante en un sistema es la relación entre las entradas y las salidas. Un sistema puede ser una estación de generación de energía completa o quizá sólo un motor eléctrico. No importa qué tan complejo sea un conjunto de
tro del sistema; se puede considerar que todos entro de una caja negra y sólo tener en cuenta las entradas y salidas a dicha
1 muestra cómo es posible representar un sistema mediante una caja con las entradas y las salidas al sistema indicadas por líneas con flechas, en las que
ada o a una salida. La rgía con su entrada de
ilustra un motor eléctrico con su
La ventaja de estudiar los sistemas de esta manera es que aunque existe una amplia variedad de sistemas posibles, la relación entre la salida y la entrada de muchos
Así, por ejemplo, la respuesta de un sistema eléctrico la aplicación súbita de un voltaje
tiene el mismo tipo de relación que la respuesta de un contenedor de líquido al cual

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
10
se le aplica súbitamente una entrada de calor (figura 2). De este modo, al estudiar un modelo de sistema con este tipo de relación entre la entrada y la salida es posible determinar cómo responderán muchas formas diferentes de sistemas con la misma relación salida-entrada.
En algunas situaciones es conveniente particionar el sistema en subsistemas enlazados en serie. Así, por ejemplo, se puede tener un sistema de medición de temperatura que consiste en un termómetro resistivo conectado a un puente de Wheatstone y la salida presentada en un medidor. El sistema completo se puede representar (figura 3), como una entrada de temperatura y una salida de una lectura en una escala, o se puede representar como formado por un subsistema de termómetro resistivo, conectado a un subsistema puente y conectado a un subsistema de medición.
Figura 2 Sistemas similares: a) sistema RC, b) sistema de calefacción
Figura 3 a) Sistema de medición de temperatura y b) sus subsistemas

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
11
Figura 4 Sistema de calefacción central
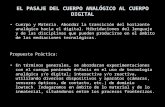
Un sistema de control es aquél en el que la salida del sistema se controla para tener un valor específico o cambiarlo, según lo determina la entrada al sistema. De este modo, un sistema de control de temperatura, por ejemplo, un sistema de calefacción central en una casa (figura 4), puede tener en su entrada un termostato o panel de control en el que se fija la temperatura requerida y su salida es la temperatura real producida. Esta temperatura se ajusta mediante el sistema de control, de modo que se obtenga el valor fijado por la entrada al sistema.
1.2 Sistemas de control en lazo abierto y cerrado
Figura 5 Ejemplo de un sistema de control en lazo abierto
Existen dos formas básicas de sistemas de control: una es la denominada en lazo abierto y la otra en lazo cerrado. Con un sistema en lazo abierto la entrada se elige con base en la experiencia que se tiene con dichos sistemas para producir el valor de salida requerido. Esta salida, sin embargo, no se ve modificada por el cambio en las condiciones de operación externas. Así, por ejemplo, un calefactor eléctrico (figura 5) puede tener un selector que permite elegir una disipación en el elemento calefactor de 1 kW o 2 kW. De este modo, la entrada al sistema está determinada por la posición del selector ya sea en 1 kW o 2 kW. La temperatura producida en la habitación acondicionada por el calefactor está determinada únicamente por el hecho de que se haya elegido la disipación de 1 kW en el selector y no 2 kW. Si se presentan cambios en las condiciones de operación, quizá alguien que abra una ventana, la temperatura cambiará debido a que no hay modo de que el calor de salida se ajuste para compensar dicha condición. Éste es un ejemplo de un sistema de control en lazo abierto en el que no existe información que se alimente de regreso (realimentación) al elemento calefactor para ajustarlo y mantener una temperatura constante. Los sistemas de control que operan mediante mecanismos de temporización preestablecidos son sistemas en lazo abierto.
Con un sistema de control en lazo cerrado se tiene una señal de realimentación hacia la entrada desde la salida, la cual se utiliza para modificar la entrada de modo que la

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
12
salida se mantenga constante a pesar de los cambios en las condiciones de operación (véase la figura 6). El sistema de calefacción con el calefactor eléctrico se puede transformar en un sistema en lazo cerrado si alguien con un termómetro monitorea la temperatura en la habitación y enciende o apaga los elementos calefactores de 1 kW o 2 kW para mantener la temperatura de la habitación constante. En esta situación existe la realimentación de una señal a la entrada referente a la temperatura, con lo que la entrada al sistema se ajusta según si su salida es la temperatura requerida o no. Así, la entrada al calefactor depende de la desviación de la temperatura real con la temperatura requerida.
Figura 6 Ejemplo de un sistema de control en lazo cerrado
Para ilustrar las diferencias adicionales entre los sistemas en lazo abierto y en lazo cerrado, considere un motor. Con un sistema en lazo abierto, la velocidad angular en el eje del motor se podría determinar sólo por la posición inicial de la perilla de selección de velocidad, que afecta al voltaje aplicado al motor. Aquí no se compensan los cambios en el voltaje de alimentación, ni en las características del motor debidos a variaciones en la temperatura o los cambios de velocidad en el eje debidos a variación de carga mecánica, ya que no existe lazo de realimentación. Por otro lado, en un sistema en lazo cerrado la posición inicial de la perilla de control tiene una velocidad específica del eje y ésta se mantiene mediante realimentación, a pesar de los cambios en el voltaje de alimentación, las características de motor o de la carga. En un sistema de control en lazo abierto la salida del sistema no tiene efecto sobre la señal de entrada. En un sistema de control en lazo cerrado la salida sí tiene un efecto sobre la señal de entrada, y la modifica para mantener una señal de salida en el valor requerido.
Los sistemas en lazo abierto tienen la ventaja de ser bastante sencillos y en consecuencia de bajo costo, y con buena confiabilidad. Sin embargo, con frecuencia son inexactos, porque no hay corrección de errores. Los sistemas en lazo cerrado tienen la ventaja de ser capaces de igualar los valores reales a los requeridos. No obstante, si existen retrasos en el sistema pueden surgir problemas. Dichos retrasos propician que la acción correctiva requerida llegue demasiado tarde, y como consecuencia, se obtienen oscilaciones en la entrada e inestabilidad (como se verá más adelante). Los sistemas en lazo cerrado son más complicados que aquellos en lazo abierto y más costosos con una gran posibilidad de descompostura debida a la

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
13
gran cantidad de componentes. Más adelante en el capítulo, se estudian las ventajas de los sistemas en lazo cerrado respecto a la minimización de los efectos de cambios en las relaciones entrada-salida de los elementos del sistema como resultado de los cambios en el medio y los efectos de las perturbaciones sobre el sistema.
Ejemplo 1
Identifique las entradas y salidas globales y sugiera el tipo de sistema de control que se puede utilizar con a) un tostador de pan automático, b) una lavadora de ropa automática, c) un sistema de calefacción central doméstico.
Respuesta
a) Con el tostador la entrada es el pan y las instrucciones del grado de tostado requerido, la salida es el nivel de tostado del pan. El grado de tostado requerido se determina mediante el ajuste de la escala del tostador y no se altera por la condición del pan. Entonces, el tostador reaccionará de la misma manera ante una pieza de pan fresco (sin tostar) o si la pieza de pan que se introduce ya está tostada, sin embargo, la salida será diferente: una pieza de pan fresco bien tostado o una como carbón. El tostador no reacciona al cambio en la condición del pan. El sistema es en lazo abierto.
b) La entrada es ropa sucia y la posición de la perilla de control, así como la posición de los interruptores para el tipo de material y forma de lavado requerido, la salida es ropa limpia. La lavadora de ropa automática es un sistema en lazo abierto puesto que llevará a cabo el mismo ciclo de procedimientos de lavado a pesar de que se introduzca ropa sucia o limpia.
c) La entrada es la temperatura requerida y la salida es la temperatura real. El sistema de calefacción central doméstico es un sistema en lazo cerrado puesto que se utiliza un termostato para asegurar que la entrada se ajuste a los cambios en las condiciones de operación y así mantenga una temperatura constante.
Lección 2: ELEMENTOS BÁSICOS EN UN SISTEMA DE CONTR OL EN LAZO ABIERTO Y LAZO CERRADO.
2.1 Elementos básicos de un sistema en lazo abierto
Se puede considerar que un sistema en lazo abierto consiste en algunos subsistemas básicos arreglados como se muestra en la figura 7. Estos elementos pueden ser distintos, equipos separados, pero todas las funciones que cumple cada subsistema se deben preservar. La entrada global al sistema es una señal, que, basada en experiencias anteriores, es probable que conduzca a la salida requerida. Los subsistemas son:
1. Elemento de control. Este elemento determina qué acción se va a tomar de acuerdo a la entrada al sistema de control, conocida como set-point.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
14
2. Elemento de corrección. Este elemento responde a la entrada que viene del elemento de control e inicia la acción para producir el cambio en la variable controlada al valor requerido.
3. Proceso. El proceso o planta es el sistema en el que se va a controlar la variable.
Figura 7 Subsistemas en un sistema de control en lazo abierto
Figura 8 Sistema de control en lazo abierto de la temperatura de la habitación
Los primeros dos subsistemas a menudo se unen para formar un elemento denominado controlador.
Ejemplo
Un ejemplo de un sistema en lazo abierto es un calefactor eléctrico utilizado para calentar una habitación (figura 8). Con dicho sistema se tiene:
Variable controlada: Temperatura de la habitación Elemento de control: Una persona que toma las decisiones
basadas en la experiencia de las temperaturas producidas mediante la conmutación del elemento calefactor.
Elemento de corrección El interruptor y el elemento calefactor Proceso La habitación
Muchos sistemas de control en lazo abierto utilizan un elemento de control que envía una señal para iniciar la acción después de algún periodo o una secuencia de señales para iniciar una secuencia de acciones en tiempos diferentes. En tales sistemas el controlador es en esencia un dispositivo de conmutación operado por un reloj. Un ejemplo de un sistema de control de este tipo es el ciclo básico de operación de la lavadora de ropa doméstica (figura 9). La secuencia podría ser:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
15
Figura 9 Lavadora de ropa doméstica
1. Establecer los controles dependiendo del tipo de ropa que se va a lavar.
2. Encender e iniciar el reloj.
3. Llenar con agua fría. La válvula que permite la entrada de agua está abierta un tiempo específico.
4. Calentar agua. El calentador se enciende un tiempo específico.
5. Lavar. El tambor de la lavadora de ropa gira un tiempo específico.
6. Vaciar agua. La válvula se abre un tiempo específico.
7. Llenar con agua fría. La válvula que permite la entrada de agua se abre un tiempo específico.
8. Enjuagado. El tambor de la lavadora de ropa gira un tiempo específico.
9. Vaciar agua. La válvula se abre un tiempo específico.
10. Exprimido. La válvula se abre un tiempo específico.
11. Paro. Después de que ha transcurrido cierto tiempo.
Además del sistema de control en lazo abierto descrito, es probable que la lavadora de ropa tenga algunos otros sistemas de control de seguridad, por ejemplo, sistemas de nivel de agua y temperatura que pueden apagar el sistema si el nivel de agua o temperatura suben demasiado.
Ejemplo 2
Identifique los subsistemas en un sistema en lazo abierto de un motor de velocidad controlada.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
16
Respuesta
Variable controlada: Velocidad del motor Elemento de control: Una persona que toma las decisiones
basadas en la experiencia de las velocidades producidas al encender el motor.
Elemento de corrección El interruptor Proceso El motor
2.2 Elementos básicos de un sistema en lazo cerrado
Se puede considerar que un sistema en lazo cerrado consiste en algunos subsistemas básicos ordenados como muestra la figura 10.
Estos elementos pueden no ser partes distintas o equipos separados, pero todas las funciones de los subsistemas estarán presentes. La entrada global al sistema de control es el valor requerido de la variable y la salida es el valor real de la variable.
1. Elemento de comparación. Este elemento compara el valor requerido o de referencia de la variable por controlar con el valor medido de lo que se obtiene a la salida, y produce una señal de error la cual indica la diferencia entre el valor obtenido a la salida y el valor requerido
Señal de error = Valor señal de referencia - Valor señal medida
2. Elemento de control. Este elemento decide qué acción tomar cuando se recibe una señal de error. A menudo se utiliza el término controlador para un elemento que incorpora el elemento de control y la unidad de corrección.
Figura 10. Subsistemas en un sistema de control en lazo cerrado
3 Elemento de corrección. Este elemento se utiliza para producir un cambio en el proceso al eliminar el error, y con frecuencia se denomina actuador.
4 Elemento proceso. El proceso, o planta, es el sistema donde se va a controlar la variable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
17
5 Elemento de medición. Este elemento produce una señal relacionada con la condición de la variable controlada, y proporciona la señal de realimentación al elemento de comparación para determinar si hay o no error.
Una característica necesaria de un sistema de control en lazo cerrado es el lazo de realimentación. Este es el medio a través del cual una señal relacionada con la variable real obtenida se realimenta para compararse con la señal de referencia. Se dice que se tiene realimentación negativa cuando la señal realimentada se sustrae del valor de referencia, esto es,
Señal de error = valor de referencia - señal de realimentación
La realimentación negativa es necesaria para que se logre el control.
La realimentación positiva se presenta cuando la señal realimentada se adiciona al valor de referencia, esto es,
Señal de error = valor de referencia + señal de realimentación
En la figura 10 la señal de realimentación se combina con el valor de referencia en el elemento de comparación. El elemento de comparación se indica mediante un círculo con una cruz, éste es el símbolo genérico para indicar un elemento de suma. Cuando en el elemento de comparación hay realimentación negativa, el valor de referencia se marca como una señal positiva y la señal de realimentación como negativa de modo que la salida del elemento de comparación es la diferencia entre las señales. Si hubiera realimentación positiva en el elemento de suma, entonces ambas señales deben marcarse como positivas.
Para ilustrar esta presentación de los elementos de un sistema de control, considere el sistema de control estudiado al principio con la figura 8, donde se controló la temperatura de una habitación mediante una persona que encendía y apagaba el elemento calefactor de acuerdo a si la temperatura de la habitación dada por un termómetro tenía o no el valor requerido (figura 11). Los elementos de este sistema de control son:
Variable controlada: Temperatura de la habitación Valor de referencia: Temperatura requerida de la habitación.
Elemento de comparación: Persona que compara el valor medido y la temperatura requerida.
Señal de error: Diferencia entre la temperatura requerida y la medida.
Elemento de control: La persona Elemento de corrección Mano que opera el encendido del
elemento calefactor. Proceso La habitación.
Dispositivo de medición: Termómetro Realimentación: Negativa

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
18
Figura 11 Sistema de control en lazo cerrado para la temperatura de una habitación
Ejemplo 3
Un tostador doméstico es un sistema en lazo abierto. Sugiera los medios que permitan hacerlo un sistema de control en lazo cerrado.
Respuesta
Para que el tostador sea un sistema en lazo cerrado debe haber una señal de realimentación que indique el grado del tono dorado del pan. Las posibilidades son: una persona que mira el pan o quizás una fotocelda que responda al grado de dorado. La salida de cualquiera de estos "sistemas de medición" sería una señal de realimentación utilizada para especificar el grado del tono real. Dicha señal de realimentación se compararía con el grado de tono dorado requerido (set-point), generando una señal de error que se puede utilizar para activar un relevador que encienda o apague el elemento de tostado o un potenciómetro que varíe el voltaje aplicado al elemento de tostado. La figura 12 muestra una forma de dicho sistema de control.
Figura 12. Ejemplo 3

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
19
2.3 Ejemplos de sistemas de control en lazo cerrado
La figura 13 muestra un ejemplo de un sistema de control sencillo utilizado para mantener constante el nivel de agua en un tanque. El valor de referencia es la posición inicial en el brazo (del flotador), de modo que cierra el suministro de agua en el nivel requerido. Cuando el agua sale del tanque, el flotador baja con el nivel de agua. Esto propicia que el brazo del flotador se mueva y permita que el agua entre al tanque. Este flujo continúa hasta que el flotador sube a una altura tal, que haya movido el brazo del flotador y cerrado el suministro de agua. Éste es un sistema de control en lazo cerrado y sus elementos son:
Variable controlada: Nivel de agua en el tanque Valor de referencia: Posición inicial en el brazo del flotador.
Elemento de comparación: Brazo del flotador Señal de error: Diferencia entre la posición real del brazo
y su posición inicial Elemento de control: Brazo pivoteado
Elemento de corrección Aleta de apertura o cierre del suministro de agua
Proceso Agua en el tanque Dispositivo de medición: El flotador y el brazo que lo sostiene
Realimentación: Negativa
Figura 13 Control automático del nivel de agua en un tanque
La figura 14 muestra un sistema de control automático sencillo para la velocidad angular de un eje. Se utiliza un potenciómetro para fijar el valor de referencia, es decir, qué voltaje se aplica al amplificador diferencial como valor de referencia para la velocidad angular requerida. El amplificador diferencial se usa tanto para comparar como para amplificar la diferencia entre los valores de referencia y realimentación, esto es, amplifica la señal de error. Después, la señal de error amplificada se aplica al motor que, a su vez, ajusta la velocidad del eje giratorio. La velocidad angular del eje se mide con un tacogenerador, conectado al eje por medio de un par de engranes

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
20
cónicos. La señal que viene del tacogenerador se realimenta al amplificador diferencial. De este modo, el sistema está formado por:
Figura 14 Control automático de la velocidad de un eje
Variable controlada: Velocidad angular del eje Valor de referencia: Voltaje especificado para la velocidad
requerida Elemento de comparación: Amplificador diferencial
Señal de error: Diferencia entre el voltaje del valor de referencia y el voltaje de realimentación
Elemento de control: Amplificador Elemento de corrección Motor
Proceso Eje giratorio Dispositivo de medición: Tacogenerador
Realimentación: Negativa En la vida diaria existen muchos sistemas de control sencillos. El acto de intentar levantar una taza de café de la mesa requiere un sistema de control con realimentación. La mano que levanta la taza se debe mover al lugar correcto, sorteando los obstáculos en el camino, y debe quedar en la posición adecuada para que los dedos puedan asir la oreja de la taza justo en la forma apropiada y levantarla. Para controlar la mano se llevan a cabo dos tareas de realimentación: visión y tacto (figura 15). Así, para el sistema de control utilizado al mover la mano al lugar a donde se localiza la taza, se tiene:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
21
Movimientos de brazo y muñeca utilizados para corregir la ubicación de la mano
Figura 15 Movimiento para levantar una taza de café
Variable controlada: Ubicación de la mano en relación a la taza
Valor de referencia: Ubicación de la taza Elemento de comparación: La persona
Señal de error: Diferencia entre la ubicación real y la requerida de la mano.
Elemento de control: La persona Elemento de corrección El brazo y la muñeca
Proceso Dinámica de la mano Dispositivo de medición: Observación visual
Realimentación: Negativa En muchos sistemas de control se tiene sólo una variable que controlar, por ejemplo, el nivel de agua en un tanque, la velocidad angular de un eje o la ubicación de la mano. Sin embargo, existen algunos sistemas de control en los que debe controlarse más de una variable. Un ejemplo es el acto de levantar una taza de café, puesto que no sólo se debe controlar la ubicación de la mano sino también la presión ejercida por los dedos al momento de asir la oreja de la taza. Aquí, se tienen dos lazos de realimentación, uno concerniente con la ubicación, el cual utiliza la visión como medio de medición, y el otro relativo a la presión, que emplea el tacto como medio de medición (figura 16). Esto se puede considerar como una forma básica de un brazo robótico con una pinza de sujeción diseñada para levantar objetos en una línea de producción.
Figura 16 Levantar una taza de café

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
22
Otro ejemplo de un sistema de control con dos variables por controlar es manejar un automóvil, éstas son, la dirección y la velocidad del automóvil (figura 17).
Figura 17. Manejo de un automóvil
Variable controlada: Dirección del automóvil en el camino Valor de referencia: Dirección requerida a lo largo del camino
Elemento de comparación: La persona Señal de error: Diferencia entre la dirección requerida y
la dirección real Elemento de control: La persona
Elemento de corrección Manos sobre el volante Proceso Dinámica del vehículo
Dispositivo de medición: Observación visual Realimentación: Negativa
Variable controlada: Velocidad del automóvil en el camino Valor de referencia: Velocidad requerida en el camino
Elemento de comparación: La persona Señal de error: Diferencia entre la velocidad real y la
requerida Elemento de control: La persona
Elemento de corrección Pies sobre los pedales del acelerador o freno
Proceso Dinámica del vehículo Dispositivo de medición: Observación visual
Realimentación: Negativa

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
23
Ejemplo 4 Un trabajador mantiene el nivel de líquido en un contenedor a un nivel constante. Para esto se observa el nivel a través de una mirilla de vidrio en una de las paredes del tanque, y ajusta la cantidad de líquido que sale del tanque con la apertura o cierre de una válvula (figura 18). Para dicho sistema de control, ¿cuáles son: a) la variable controlada, b) el valor de referencia, c) el elemento de comparación, d) la señal de error, e) el elemento de control, f) el elemento de corrección, g) el proceso y h) el dispositivo de medición?
Figura 18 Ejemplo 4
Respuesta
Variable controlada: Nivel de líquido en el tanque Valor de referencia: Nivel requerido, marcado en el vidrio
Elemento de comparación: La persona Señal de error: Diferencia entre el nivel requerido y el
real Elemento de control: La persona
Elemento de corrección Válvula Proceso Agua en el contenedor
Dispositivo de medición: Observación visual de la mirilla de vidrio Realimentación: Negativa

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
24
Lección 3: ESTRATEGIAS DE CONTROL
Figura 19 Modo de control de dos posiciones
El elemento de control tiene como entrada la señal de error y como salida una señal que se convierte en la entrada a la unidad de corrección de modo que se pueda iniciar la acción para eliminar el error. Existen varias formas para que el elemento de control reaccione ante una señal de error. Con sistemas de control en lazo abierto los tipos de control más probables son el de dos posiciones (encendido-apagado o mejor conocido como on-off) o secuencias o acciones conmutadas por tiempo. Un ejemplo del control on-off es una persona que enciende un calefactor eléctrico para obtener la temperatura requerida en una habitación. Un ejemplo de una secuencia conmutada por tiempo es la operación de la lavadora de ropa doméstica (vea detalles al principio de este capítulo). Con sistemas de control en lazo cerrado los tipos de control son a menudo el control de dos posiciones, el control proporcional o el control proporcional combinado con algún otro refinamiento. Con el modo de control de dos posiciones, la señal de error de entrada al elemento de control es una salida de encendido o de apagado, que se utiliza para encender o apagar al elemento de corrección (figura 19). Así, en el caso del sistema de calefacción central doméstico controlado por un termostato, éste produce una salida que enciende o apaga el calefactor según el error. Si la temperatura de la habitación baja de cierto valor, entonces el termostato enciende el calefactor; si por el contrario, la temperatura rebasa el valor fijado, el calefactor se apaga. Con el control proporcional la salida del elemento de control es una señal, la cual es proporcional al error: cuanto mayor sea el error mayor será la salida (figura 20). Esto significa que el elemento de corrección recibirá una señal que depende de la magnitud de la corrección que se necesite. En la figura 21 se muestra un ejemplo de tal sistema de control para mantener constante el nivel de un líquido. Los cambios en el nivel producen un movimiento del flotador y, por lo tanto del brazo móvil que lo sostiene. A su vez, esto cambia la apertura de la válvula y afecta la tasa a la que el líquido sale del tanque. Cuanto mayor sea el error en el nivel del líquido mayor será el cambio en la apertura de la válvula. Debido a que el control proporcional por sí solo puede presentar algunos problemas, con frecuencia se combina con otras formas de control. Existe el control derivativo,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
25
donde la salida es proporcional a la razón de cambio de la señal de error, y el control integral, donde la salida en el tiempo es proporcional a la integral de la señal de error en el intervalo entre t = 0 y t. Un ejemplo sencillo del control proporcional derivativo es un vehículo automático donde el controlador toma acciones basadas no sólo en el conocimiento de la posición del vehículo, sino también de su velocidad, es decir, la razón de cambio de la distancia. Con sólo el control proporcional, el controlador da nada más una respuesta en proporción a la magnitud del error de la posición re-querida. No toma en cuenta la rapidez del cambio del error. El control derivativo sí lo hace. Así, si el vehículo se empieza a mover alejándose rápido de la trayectoria requerida, con el control derivativo habrá una acción correctiva mucho mayor que si el vehículo se alejara lentamente de la trayectoria requerida. De este modo, la combinación del control proporcional derivativo toma en cuenta más rápido las desviaciones de la trayectoria requerida y las corrige. Las formas de estrategias de control descritas se estudiarán con mayor detalle en el capítulo 8.
Figura 20 Control proporcional
Figura 21 Sistema de control de nivel proporcional

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
26
Ejemplo 5 ¿Qué tipo de estrategia de control se usa en los siguientes sistemas de control? a) Un refrigerador. b) Guiado de un automóvil en un camino. Respuesta a) En el refrigerador un termostato controla la temperatura y es probable que sea un sistema de control simple de dos posiciones, on-off. b) Tal vez sea un control proporcional en el que la salida del controlador, es decir, movimiento del volante por parte del conductor, puede ser proporcional al error.
Lección 4: MODELOS MATEMATICOS DE LOS SISTEMAS DE C ONTROL.
4.1 Modelos matemáticos para sistemas Con la finalidad de entender el comportamiento de los sistemas es necesario obtener modelos matemáticos que los representan. El modelo de un barco es una réplica a escala de un barco de tamaño real. En el modelo, los tamaños relativos de las diferentes partes guardan las mismas proporciones que en el barco de tamaño natural, es decir, hay un escalamiento constante hacia abajo de los tamaños. Una fotografía se puede considerar un modelo de la escena que se fotografió. Un modelo matemático de un sistema es una "réplica" de las relaciones entre entrada y salida o entre entradas y salidas. Las relaciones reales entre la entrada y la salida de un sistema se sustituyen por expresiones matemáticas. Considere un motor como sistema. La entrada al motor es un voltaje V y la salida es la velocidad angular ω del eje. Para muchos sistemas existen relaciones lineales razonables entre la entrada y la salida. Esto significa que la salida es proporcional a la entrada y si la entrada se duplica, entonces la salida también se duplica, es decir, si la entrada se multiplica por una constante, entonces la salida se multiplica por la misma constante. Esto también quiere decir que si la entrada 1 produce una salida 1 y la entrada 2 produce una salida 2, entonces una entrada igual a la suma de las entradas 1 y 2 producirá una salida igual a la suma de las salidas 1 y 2. De este modo, si existe una relación lineal entre la salida y la entrada para el motor, entonces el modelo matemático es:
ω = GV
Donde G es la constante de proporcionalidad. Esta relación implica que si el voltaje cambia, entonces deberá haber un cambio inmediato correspondiente en la velocidad angular del eje. En la realidad, éste no será el caso, puesto que el motor toma un tiempo para que el eje cambie a la nueva velocidad. Así, la relación existe, sólo entre el voltaje y la velocidad cuando el sistema ha tenido suficiente tiempo para asentarse ante cualquier cambio en la entrada, es decir, esto se refiere a lo que se denomina

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
27
condición de estado estable. Entonces, para aclarar, la ecuación se puede escribir como: Valor en estado estable de ω = G * Valor en estado estable de V
Por lo tanto
La constante G se denomina función de transferencia o ganancia del sistema. En general, se puede definir la función de transferencia como el cociente de la salida en estado estable sobre la entrada en estado estable para un sistema o subsistema.
[1] Por ejemplo, al insertar una moneda en una máquina de barras de chocolate se obtiene la salida de una barra de chocolate. La función de transferencia, para el estado estable, es 1 barra/moneda. Si se supone que el sistema es lineal, para una entrada de dos monedas se obtendrían dos barras de chocolate. Un sistema de medición de temperatura puede tener una entrada de 10 °C y producir una salida en estado estable de 5.0 mV. Este sistema tiene una función de transferencia de 0.5 mV/°C. Si se supone que el sistema es lineal se pue de predecir que si la entrada fuera de 20 °C entonces la salida en estado estable sería 10.0 mV. El modelo matemático del sistema es
Lo anterior es el análisis de un sistema que tiene una relación lineal entre la entrada y la salida. Sin embargo, los sistemas reales pueden exhibir un comportamiento no lineal. En muchos casos tales sistemas son lineales si las señales de entrada se mantienen dentro de ciertos límites. Para la máquina de barras de chocolate el sistema es lineal siempre que no se inserte un mayor número de monedas que las barras de chocolate que tiene la máquina. Un amplificador puede ser lineal sólo para señales de entrada hasta cierta magnitud. Más adelante en este módulo se considerarán las definiciones de función de transferencia en las que se pueden tomar en cuenta no sólo los valores en estado estable de la entrada y la salida, sino también los cambios transitorios que tienen lugar en el tiempo. Así, en el resto de este capítulo las discusiones se basan en el comportamiento de los sistemas en términos de los valores en estado estable, y habrá que considerarlos sólo como una representación muy simplista de los sistemas de control.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
28
Ejemplo 6 Un motor tiene una función de transferencia de 500 rev/min por voltio. ¿Cuál será la velocidad de salida en estado estable para tal motor cuando la entrada es 12 V? Respuesta
Entonces,
4.2 Modelos matemáticos para sistemas en lazo abierto Existen muchas situaciones donde se requiere la función de transferencia para varios elementos en serie. Considere tres elementos en serie como se muestra en la figura 22. Los tres elementos pueden ser un sistema en lazo abierto puesto que no hay lazo de realimentación, o sólo tres elementos en serie de un sistema más grande. Para el elemento 1 la función de transferencia G1, es la salida Ө1 dividida entre la entrada Өi. Así,
Figura 22 Función de transferencia con un sistema de lazo abierto
Para el elemento 2 la función de transferencia G2 es la salida Ө2 dividida entre la entrada Ө1. Es decir,
Para el elemento 3 la función de transferencia G3 es la salida Ө0 dividida entre la entrada Ө2. Esto es,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
29
La función de transferencia global del sistema es la salida Ө0 dividida entre la entrada Өi. Pero esto se puede escribir como Por lo tanto, para el sistema en lazo abierto
[2] La función de transferencia global en lazo abierto es el producto de las funciones de transferencia de los elementos individuales. Esto se aplica a cualquier número de elementos conectados en serie. Ejemplo 7 El sistema de medición empleado en un sistema de control consta de dos elementos, un sensor y un acondicionador de señal en serie (figura 23). Si el sensor tiene una función de transferencia de 0.1 mA/Pa y el acondicionador de señal una función de transferencia de 20, ¿cuál es la función de transferencia del sistema de medición?
Figura 23 Ejemplo 7
Respuesta El sensor y el acondicionador de señal están en serie, de modo que la función de transferencia combinada es el producto de las funciones de transferencia de los elementos individuales. 4.3 Modelos matemáticos para sistemas en lazo cerra do 1 La figura 24 muestra un sistema en lazo cerrado sencillo. Si Өi es el valor de referencia, es decir, la entrada, y si Ө0 es el valor real, es decir, la salida del sistema, entonces la función de transferencia del sistema completo es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
30
Figura 24 Sistema sencillo en lazo cerrado
Cada subsistema en el sistema global tiene su propia función de transferencia. De este modo, si el sistema que se controla tiene una función de transferencia G, entonces con su entrada de la señal de error e y salida Ө0,
Si la trayectoria de realimentación tiene una función de transferencia H, con entrada Ө0 y salida ƒ,
La señal de error e es la diferencia entre Өi y ƒ. La señal de realimentación ƒ es una medida de la salida del sistema completo.
Al sustituir e y ƒ, despejándolas a partir de las dos ecuaciones anteriores,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
31
Por lo tanto, la función de transferencia global del sistema de control en lazo cerrado es
[3]
La ecuación anterior se aplica a realimentación negativa, es decir, tal y como se pudo observar en la figura 24, la señal de realimentación f se resta al set point o señal de entrada. Con realimentación positiva el denominador de la ecuación anterior se con-vierte en (1 - GH). En el sistema en lazo cerrado, G se conoce como la función de transferencia de la trayectoria directa, puesto que es la función de transferencia que relaciona las señales que se mueven hacia adelante a través del sistema de la entrada a la salida. GH se conoce como función de transferencia de lazo, ya que es el término que se presenta en la expresión como resultado del lazo de realimentación. Ejemplo 8 Un motor de velocidad controlada tiene un sistema motor-relevador-amplificador con una función de transferencia combinada de 600 rev/min por voltio y un sistema de medición en el lazo de realimentación con una función de transferencia de 3 mV por rev/min, como ilustra la figura 25. ¿Cuál es la función de transferencia global?
Figura 25 Ejemplo 8
Respuesta El sistema tendrá realimentación negativa y así la función de transferencia global está dada por la ecuación [3] vista anteriormente como

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
32
4.4 Modelos matemáticos para sistemas en lazo cerra do 2 Considere el sistema en lazo cerrado que muestra la figura 26. La función de transferencia para el sistema completo se puede obtener determinando primero la función de transferencia para los tres elementos en serie. Como éstos tienen funciones de transferencia G1, G2 y G3, entonces la función de transferencia combinada es
El sistema en lazo cerrado de la figura 26 se puede reemplazar por el sistema equivalente más sencillo, como se muestra en la figura 27. Ahora, existe sólo un elemento con una función de transferencia que resultó de la multiplicación de G1, G2 y G3 y un lazo de realimentación con una función de transferencia H. La función de transferencia global para este sistema es entonces
Figura 26 Función de transferencia de un sistema en lazo cerrado con elementos múltiples
Figura 27 Sistema equivalente para la figura 26

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
33
Ejemplo 9 Un sistema de control de posición utilizado con una máquina herramienta tiene un amplificador en serie con una válvula corrediza y un lazo de realimentación con un sistema de medición de desplazamiento (figura 28). ¿Cuál es la función de transferencia global para el sistema de control?
Figura 28 Ejemplo 9 Respuesta El amplificador y la válvula corrediza están en serie, por lo que la función de transferencia combinada para los dos elementos es el producto de sus funciones de transferencia separadas,
Estos elementos tienen un lazo de realimentación con una función de transferencia de 30 mV/mm. La función de transferencia global para el sistema de control es
4.5 Error en estado estable El error en estado estable E de un sistema es la diferencia entre la salida del sistema y su entrada cuando las condiciones están en estado estable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
34
Puesto que para un sistema con una función de transferencia global Gs
Entonces,
Para un sistema en lazo abierto con tres subsistemas en serie el error en estado estable se puede escribir como
Donde G1, G2 y G3 son las funciones de transferencia de los elementos en el sistema. Para que el error sea cero, G1 G2 G3 deben ser igual a 1. Aunque esto se puede lograr en la preparación o calibración del sistema, es inevitable que se presenten errores en estado estable debido a que las funciones de transferencia cambian como consecuencia de cambios en el medio ambiente. Para un sistema en lazo cerrado el error en estado estable, dado por la ecuación [5], se puede escribir como:
donde G es la función de transferencia de los elementos en la trayectoria directa, es decir, G = G1 G2 G3 para tres elementos en serie con funciones de transferencia G1, G2 y G3, y H es la función de transferencia del sistema de medición. Para un error en estado estable nulo, se debe tener G = 1 + GH de modo que G/(1 + GH) tenga el valor de 1. Igual que en el sistema de control en lazo abierto, las funciones de transferencia tienden a cambiar con las condiciones ambientales. Sin embargo, si GH es mucho mayor que 1, el denominador de la ecuación [7] se aproxima a H, ya que se puede despreciar el 1 comparándolo con GH, así:
Y así los cambios en las funciones de transferencia de los elementos de la trayectoria directa casi no tienen efecto sobre el error. De esta manera, la sensibilidad del sistema en lazo cerrado para tales efectos es mucho más pequeña que para un sistema en lazo abierto. Ésta es una de las grandes ventajas que tienen los sistemas en lazo cerrado respecto a los sistemas en lazo abierto.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
35
Ejemplo 10 La figura 29 muestra un controlador con una función de transferencia de 12 y un motor con una función de transferencia de 0.10 rev/min por V. a) ¿Cuál será el error en estado estable cuando el sistema es un sistema de control en lazo abierto y cómo cambiará el error si, debido a cambios ambientales, la función de transferencia del motor aumenta en un 10%?
Figura 29 Ejemplo 10: a) lazo abierto, b) lazo cerrado
b) ¿Cuál será el error en estado estable cuando el sistema es un sistema de control en lazo cerrado si el lazo de realimentación tiene una función de transferencia de 1.0 V por rev/min y cómo cambiará el error si, debido a cambios ambientales, la función de transferencia del motor aumenta en un 10%? Respuesta a) Empleando la ecuación [6], antes de que se presente cualquier cambio
Si hay un cambio de 10% en la función de transferencia del motor, es decir, 0.11 rev/min por V, entonces

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
36
El error se ha incrementado en un factor de 16. b) Con la ecuación [7]
Entonces, antes de que ocurra cualquier cambio
Si hay un cambio de 10% en la función de transferencia del motor, es decir, 0.11 rev/min por V, entonces
El cambio en el error es mucho más pequeño que el cambio que se presenta en el sistema en lazo abierto. El sistema en lazo cerrado tiene una sensibilidad más baja a los cambios ambientales que el sistema en lazo abierto. Ejemplo 11 Un sistema de control en lazo cerrado tiene una función de transferencia de la trayectoria directa de 10. ¿Cuánto debe ser la función de transferencia de la trayectoria de realimentación para que el error en estado estable sea cero? Respuesta Según la ecuación [7]
para que E sea cero, entonces

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
37
por lo tanto, con G = 10, entonces
y, de este modo, despejando H, ésta debe ser 0.9.
Lección 5: EFECTO DE LAS PERTURBACIONES Y ESTABILID AD EN EL MODELAMIENTO DE UN SISTEMA.
5.1 Efectos de las perturbaciones Una consideración importante con un sistema de control es el efecto de cualquier perturbación. De esta manera, en un sistema de calefacción central doméstico con un sistema de control en lazo abierto involucrado, el calefactor se enciende para obtener la temperatura requerida en la habitación, ¿qué ocurrirá si alguien abre la ventana y permite que el aire frío entre en la habitación? Tal perturbación se puede incorporar en el diagrama de bloques del sistema de la forma que muestra la figura 30. En este caso, la perturbación Өd se suma a la salida del proceso. Para tal situación se tiene
Figura 30 Sistema de control en lazo abierto con una perturbación
El término Өd es el error en estado estable adicionado al sistema por la presencia de la perturbación. Si la perturbación se adiciona al sistema entre los elementos 1 y 2 (como ilustra la figura 31), entonces
Figura 31 Sistema de control en lazo abierto con una perturbación en el medio

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
38
El término G2Өd es el error en estado estable adicionado al sistema por la presencia de la perturbación. Con un sistema en lazo cerrado, por ejemplo, en un sistema de calefacción central doméstico si el valor fijado en el termostato no se modifica y alguien abre la ventana y permite que el aire frío entre a la habitación, el sistema de control sujeto a tal perturbación se puede representar mediante un diagrama de bloques de la forma que muestra la figura 32. La señal de error al elemento 1 es (Ө¡-f), donde f es la señal de realimentación. La señal de salida del elemento 1 y entrada al elemento 2 es, G1(Өi - f). La salida del elemento 2 es G1G2 (Өi- f). La perturbación se agrega a éste en este punto y así la salida Ө es
Figura 32 Sistema de control en lazo cerrado con una perturbación.
Pero la realimentación f es HӨo. Por tanto
Reordenando se obtiene
El término Өd [1/(1 + G1G2H)] es el error en estado estable que se incorpora al sistema mediante la perturbación. Si esta ecuación se compara con la situación en lazo abierto, es decir, la ecuación [8], se verá que el efecto de la perturbación se

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
39
modifica por el factor 1/(1 + G1G2H). Esta propiedad de modificar el efecto de una perturbación se denomina rechazo a perturbaciones. La figura 33 muestra un sistema en lazo cerrado y la perturbación se presenta entre los dos elementos de la trayectoria directa. Para el sistema la entrada al primer elemento es (Өi - f) y su salida es G1 (Ө¡ - f). Ésta se combina con la perturbación Өd para dar la entrada al segundo elemento. Así, la salida de este elemento Өo es
Figura 33 Sistema de control en lazo cerrado con una perturbación
Lo cual se puede simplificar a
El término Өd[G2/(1 + G1G2H)] es el error en estado estable que se introduce al sistema mediante la perturbación. Si esta ecuación se compara con la de la situación en lazo abierto, es decir, la ecuación [9], se verá que el efecto de la perturbación se modifica en la situación en lazo cerrado por el factor G2/(1 + G1G2H) y en la situación en lazo abierto sólo por G2. El factor 1/(1 + G1G2H) es así una medida de qué tanto se modifican los efectos de la perturbación con el lazo de realimentación. De este modo, siempre que se presente una perturbación en el sistema en lazo cerrado, su efecto se reduce por el factor 1/(1 + GH), donde G es la función de transferencia de la trayectoria directa (G = G1G2) y H es la función de transferencia de la realimentación. Esta es una de las ventajas de los sistemas de control en lazo cerrado sobre los sistemas de control en lazo abierto: éstos son mucho mejores para aminorar los efectos de las perturbaciones en el sistema.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
40
Las perturbaciones se pueden presentar de varias formas, el término perturbación se puede interpretar como una señal no deseada la cual afecta la salida del sistema. Las perturbaciones pueden venir de fuentes exógenas, por ejemplo, alguien abre una ventana y afecta así el sistema de calefacción para la habitación o quizás el viento que afecta la orientación de la antena del radar o un bache en el camino que afecta el manejo de un vehículo en un camino. Las perturbaciones también pueden venir del interior del sistema, por ejemplo, ruido eléctrico en un amplificador. Ejemplo 12 Un amplificador electrónico tiene una función de transferencia de 100. ¿Cuánto mejorará el amplificador en el rechazo del ruido generado internamente si éste cuenta con un lazo de realimentación con una función de transferencia de 10? Respuesta El efecto de adicionar un lazo de realimentación es el de reducir el efecto de la perturbación en un factor de 1/(1 + GH). De este modo, el efecto del ruido se reduce en un factor de 1/(1 + 100x 10) = 1/1001.
5.2 Sensibilidad a cambios en los componentes Con un sistema en lazo abierto la función de transferencia global está dada por la ecuación:
dondeG1, G2 y G3 son las funciones de transferencia de los elementos en el sistema, si éste está compuesto por tres subsistemas. Los cambios en las características de estos elementos con el tiempo y las condiciones ambientales pueden resultar en un cambio en la función de transferencia. Así, por ejemplo, si un elemento es un motor, el incremento de la fricción en los rodamientos resultaría en un decremento en la función de transferencia del motor. Un cambio en la función de transferencia del elemento 1 de ∆G1 significa un cambio en la función de transferencia global para el sistema en lazo abierto de
Con un sistema en lazo cerrado, compuesto por 3 subsistemas en la trayectoria directa, y con realimentación negativa, la función de transferencia global está dada por la ecuación:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
41
Donde G1, G2 y G3 son las funciones de transferencia de los elementos en la trayectoria directa y H, la función de transferencia de la trayectoria de realimentación. Si G1G2G3H es mucho mayor que 1, entonces la expresión se aproxima a
Por ejemplo, cualquier cambio en la función de transferencia del elemento 1 en la trayectoria directa, tendrá un efecto insignificante sobre la función de transferencia global. Esto tiene un marcado contraste con la situación de un sistema en lazo abierto y esta insensibilidad a cambios en las características de los elementos de la trayecto-ria directa es una de las ventajas de los sistemas en lazo cerrado sobre los sistemas en lazo abierto. Sin embargo, un cambio en la función de transferencia de la trayectoria de realimentación producirá un correspondiente cambio en la función de transferencia global del sistema. El sistema en lazo cerrado no es insensible a cambios en las características de los elementos en la trayectoria de realimentación. Ejemplo 13 Un amplificador operacional tiene una función en lazo abierto de 200000 y una función de transferencia en la trayectoria de realimentación de 0.1. ¿Cuál será el cambio porcentual en la función de transferencia global si la función de transferencia del amplificador cambia en 10%? Respuesta Para el sistema en lazo cerrado, según la ecuación [3],
Así, de manera inicial
El cambio en la función de transferencia global es 0.0001 y, por lo tanto, es un cambio porcentual de 0.01%. Así, al usar el amplificador sin realimentación se tendría un cambio de 10% en la función de transferencia; con realimentación este cambio es de 0.01%.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
42
5.3 Estabilidad de los sistemas de control En términos mecánicos se dice que un sistema está en equilibrio estable, si cuando se le da un empujón, éste regresa a su posición original cuando se deja de empujar. Un ejemplo de esta situación es una bola en reposo sobre un plato esférico (figura 34). Cuando la bola se empuja, ésta se mueve hacia un lado del plato, pero cuando se deja de empujar, regresa pronto a su posición de reposo al centro del plato. Sin embargo, la posición sería inestable si la bola estuviera en reposo sobre la parte exterior del plato; si éste se voltea, cualquier ligero empujón causa que la bola ruede y no regrese a su posición original cuando se deja de empujar.
Figura 34 a) Estable, b) inestable
En general, se dice que un sistema es estable si cuando está sujeto a una entrada o perturbación acotada, entonces la salida es acotada. Una entrada o salida acotada es la que tiene una magnitud finita. Así, en el caso de la bola, la entrada es al inicio cero, seguido de un empujón que no continúa en forma indefinida sino que cesa después de un tiempo. La salida en la condición estable es tal que el empujón causa el movimiento de la bola y que se desplace de su posición de reposo, pero eventualmente el movimiento de la bola cesa y el desplazamiento no continúa incrementándose o cambiando. En la condición inestable, el desplazamiento de la salida se va incrementando, es decir, una entrada de magnitud finita puede producir una salida que crece sin límite.
La condición para estabilidad también se puede expresar como que un sistema es estable si al excitarlo con un impulso la salida regresa eventualmente a cero.
Los sistemas de control en lazo abierto son inherentemente estables. Una entrada finita produce una salida finita y que en forma indefinida no cambia con el tiempo. Al incrementar la función de transferencia de un elemento en tales sistemas no tiene efecto en la estabilidad del propio sistema. Así, para un sistema en lazo abierto denominado máquina de barras de chocolate, el insertar la moneda apropiada dará como resultado una barra de chocolate, no continuará dando barras de chocolate de manera indefinida. Al cambiar el tipo de barra, el costo de cada barra no tiene efecto sobre la estabilidad del sistema.
No obstante, los sistemas en lazo cerrado pueden mostrar inestabilidad, que se puede presentar como resultado de tiempos de retardo que ocurren entre el cambio

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
43
en la variable y la señal de realimentación que resulta de la respuesta del sistema. Un ejemplo es el sistema de control para un brazo robótico, o la mano de un borracho:
Levantar una taza de café. La mano se mueve hacia la taza de café y se supone que vira hacia la derecha de la trayectoria requerida. Al darse cuenta de esta desviación se envía una señal a la mano para iniciar el movimiento a la izquierda. Esta señal continúa en la situación ideal hasta que la mano alcanza la trayectoria requerida. Sin embargo, si hay tiempos de retardo en el sistema, la acción puede continuar por un periodo prolongado y la mano puede sobrepasar la trayectoria requerida antes de que el sistema reaccione. Entonces la mano está muy alejada a la izquierda. Se envía entonces una señal para que la mano se mueva a la derecha. Una vez más, debido a los tiempos de retardo la mano sobrepasa la trayectoria requerida y termina ahora a la derecha de la posición requerida. El ciclo entero se puede repetir dirigiéndose la mano hacia adelante o hacia atrás, de un lado a otro, de la trayectoria requerida. De esta manera, una perturbación inicial puede producir una situación inestable. La inestabilidad depende de la función de transferencia de la trayectoria directa, puesto que un valor grande para ésta resultaría en un gran movimiento de la mano durante el tiempo de retardo.
Otro ejemplo de inestabilidad se puede presentar cuando una persona para bañarse ajusta en forma manual la temperatura del agua mediante una llave mezcladora, la cual permite determinar las cantidades relativas de agua caliente y fría. Suponga que al principio el agua está muy fría. Entonces se incrementa el elemento agua caliente. Sin embargo, existe un tiempo de retardo antes de que el agua caliente alcance la salida de la regadera. De este modo, si la persona no espera y sólo responde a la temperatura del agua, continuará incrementando el elemento agua caliente. El resultado será que cuando el agua muy caliente alcance la salida de la regadera se calentará muy rápido. La persona entonces incrementa el elemento agua fría. Una vez más, debido al tiempo de retardo que transcurre antes de que el agua se enfríe a la salida de la regadera, la persona continuará incrementando el elemento agua fría. El resultado será que cuando el agua fría alcance la salida de la regadera se enfriará muy rápido. Así, el ciclo se repite con el resultado de que la temperatura del agua en la salida de la regadera oscilará ampliamente.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
44
Lazo cerrado contra lazo abierto
Las ventajas de tener una trayectoria de realimentación y, por lo tanto, un sistema en lazo cerrado en lugar de un sistema en lazo abierto se pueden resumir de la manera siguiente:
1. Más exactitud en la igualación de los valores real y requerido para la variable.
2. Menos sensibilidad a las perturbaciones.
3. Menos sensibilidad a cambios en las características de los componentes.
4. La velocidad de respuesta se incrementa y, por lo tanto, el ancho de banda es mayor, es decir, el intervalo de frecuencias en los que el sistema responderá.
Pero hay algunas desventajas:
1. Hay una pérdida en la ganancia en cuanto a que la función de transferencia de un sistema en lazo abierto, se reduce de G a G/(1 +GH) por una trayectoria de realimentación con una función de transferencia H.
2. Existe una gran posibilidad de inestabilidad.
3. El sistema es más complejo y, por lo tanto, no sólo más caro, sino más propenso a descomposturas.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
45
CAPITULO 2: DIAGRAMAS DE BLOQUES Y ERROR EN ESTADO ESTABLE EN SISTEMAS DE CONTROL
Introducción
Al modelarse un sistema de control se debe buscar la forma de construir un mapa lógico que permita determinar la secuencia del desarrollo de los procesos. Establecer modelos para sistemas complicados es el resultado de enlazar algunos subsistemas o elementos, cada uno de los cuales tiene su propia función de transferencia. Los diagramas de bloque se pueden usar para representar cada uno de estos subsistemas y, el agrupamiento del arreglo enlazado, representa el sistema como un todo. Cuando a un sistema de control se aplica un comando de entrada, en general, se espera que después de que se desvanecen todos los efectos transitorios, la salida del sistema se asentará al valor del comando. La diferencia entre este valor y el comando de entrada se denomina error en estado estable. El error en estado estable para un sistema depende del sistema en cuestión y de la forma que tome la entrada al sistema; esto lo analizamos en detalle en esta lección.
Lección 1: DIAGRAMA DE BLOQUES.
Establecer modelos para sistemas complicados es el resultado de enlazar algunos subsistemas o elementos, cada uno de los cuales tiene su propia función de transferencia. Los diagramas de bloques se pueden usar para representar cada uno de estos subsistemas y, el agrupamiento del arreglo enlazado, el sistema como un todo. En este capítulo la atención se centra en tales agrupamientos y cómo se de-termina la respuesta global del sistema a partir del conocimiento de la función de transferencia individual de cada bloque.
1.1 El diagrama de bloques
Figura 35 Elementos de un diagrama de bloques
La figura 35 muestra cómo representar los elementos en un diagrama de bloques. Las flechas se usan para representar las direcciones de flujo de la señal. Cuando las señales son funciones del tiempo se representan con letras minúsculas seguidas por (t), por ejemplo i(t), aunque con frecuencia (t) se omite cuando es obvio que las

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
46
señales son funciones del tiempo. Cuando las señales están en el dominio de s se representan con letras mayúsculas seguidas por (s), por ejemplo, I(s). Un punto suma es en el que las señales se suman algebraicamente. Si una de las señales que entra a dicho punto se indica como positiva y la otra, como negativa, entonces dicha suma es la diferencia entre las dos señales. Si ambas señales se indican como positivas entonces la suma algebraica es la adición de las dos señales. En el capítulo 1 éste punto suma, cuando se usó para comparar el valor requerido con una señal de realimentación que indica el valor real, se denominó comparador, la señal de realimentación se sustrae del valor deseado para obtener la señal de error. Cuando de algún punto del diagrama, se toma una señal, el punto de separación se represen-ta de la misma forma, que en un circuito eléctrico, donde la unión entre dos conductores permite que la corriente se separe, es decir, la unión se representa mediante el encuentro de dos líneas y la unión se indica con un punto. En general, el bloque se dibuja con la función de transferencia escrita dentro de él.
Figura 36. Trayectorias de realimentación y prealimentación
El término trayectoria directa se usa para los elementos a través de los cuales pasa la señal en la dirección entrada-salida a lo largo del sistema (figura 36). Las funciones de transferencia para los elementos en esta trayectoria directa en general se designan mediante G o G(s). El término trayectoria de realimentación se usa para los elementos por los cuales pasa la señal cuando se alimenta de regreso desde la salida hacia la entrada (figura 36a). Las funciones de transferencia para los elementos en esta trayectoria de realimentación por lo común se designan por H o H(s). El término trayectoria de prealimentación se usa para los elementos que están en paralelo con la trayectoria directa y a través de los cuales la señal se mueve en la misma dirección, es decir, entrada-salida (figura 36b).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
47
1.2 Bloques en serie
Si el sistema consta de varios elementos en serie, por ejemplo, 3 subsistemas, entonces la función de transferencia del sistema G(s) es
Pero para el primer elemento se tiene
Para el elemento 2
y para el elemento 3
Pero
De este modo
[1]
Así, el número de bloques en serie, con funciones de transferencia G1 (s), G2 (s), G3 (s), etcétera, se puede reemplazar por un solo bloque con una función de transferencia G(s). Vea el capítulo 1 para la obtención de las funciones de transferencia cuando se hace referencia a éstas sólo en estado estable.
De esta manera, para los dos elementos de la figura 36a, G1 (s) y G2 (s) en serie, si Өi (s) es la entrada al arreglo y Ө0 (s) la salida

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
48
[2]
Se supone que cuando los bloques individuales en los que no existe interacción, se conectan entre sí, producen cambios en la función de transferencia de los bloques individuales. Sólo si no existe tal interacción, las funciones de transferencia de los bloques se pueden usar en forma aislada para obtener la función de transferencia global cuando éstos se combinan. De este modo, si los bloques individuales son circuitos eléctricos puede haber problemas al combinarlos debido a que los circuitos interactúan y se cargan unos a otros.
Ejemplo 14
Figura 37 Ejemplo 14
Un sistema en lazo abierto consta de dos elementos en serie; los elementos tienen las funciones de transferencia que se indican en la figura 37 ¿Cuál es la función de transferencia del sistema como un todo? Respuesta Para los bloques en serie, la ecuación [1] da por resultado
G(s) = Gl (s) x G2 (s) x G3 (s) x etcétera
Por lo tanto

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
49
1.3 Bloques con lazos de realimentación
Figura 38 a) Realimentación negativa, b) realimentación positiva
La figura 38a muestra un sistema en lazo cerrado sencillo con realimentación negativa. Con la realimentación negativa las señales de referencia y de realimentación se restan en el punto suma y con realimentación positiva éstas se suman (figura 38b). Si Өi (s) es el valor de referencia, es decir, la entrada, y Ө0 (s) es el valor real, es decir, la salida del sistema, entonces la función de transferencia del sistema de control completo es
Función de transferencia:
Cada subsistema dentro del sistema global tiene su propia función de transferencia. Para la trayectoria de realimentación, la función de transferencia es H(s); entonces, con su entrada Өo (s) tendrá una salida H(s) Өo (s) hacia la trayectoria directa. De esta manera, si la trayectoria directa del sistema tiene una función de transferencia G1(s), entonces, con su entrada Өi (s) -H(s) Өo (s) y salida de Өo (s), tenemos:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
50
Así, al reordenar ésta se obtiene
[3]
Por lo tanto, la función de transferencia global del sistema de control en lazo cerrado es
[4]
Si la realimentación es positiva (figura 38b), entonces
Ejemplo 15 ¿Cuál es la función de transferencia global para el sistema que ilustra la figura 39?
Figura 39 Ejemplo 15
Respuesta La realimentación es negativa, por lo tanto, según la ecuación [4]

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
51
1.4 Bloques en serie y con un lazo de realimentació n
Considere un sistema en lazo cerrado que consta de tres componentes en serie en la trayectoria directa y con un lazo de realimentación, como muestra la figura 40. La función de transferencia de la trayectoria directa es de esta manera
Función de transferencia de la trayectoria directa =
El sistema en lazo cerrado se puede así reemplazar por el sistema equivalente más sencillo, como ilustra la figura 41. Ahora sólo se tiene un elemento con una función de transferencia de Gl (s) x G2 (s) x G3 (s) y un lazo de realimentación con una función de transferencia H(s). La función de transferencia global G(s) para el sistema es, entonces
Figura 40 Función de transferencia de un sistema de lazo cerrado con elementos múltiples
Figura 41 Sistema equivalente para la figura 40
Ejemplo 16 Un sistema de control (figura 42) tiene una trayectoria directa de dos elementos, la función de transferencia es K y 1/ (s +1). Si la trayectoria de realimentación tiene una función de transferencia de s, ¿cuál es la función de transferencia en lazo cerrado?
Figura 42 Ejemplo 16

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
52
Respuesta Para los elementos de la trayectoria directa la función de transferencia global es, según la ecuación [1] Función de transferencia de la trayectoria directa:
Debido a que se tiene realimentación negativa, la función de transferencia global G(s) es, al usar la ecuación [4]
1.5 Bloques en paralelo
Figura 43 Lazo de prealimentación
La figura 43 muestra parte de un sistema de control con lazo de prealimentación. Para este sistema la señal de entrada a cada elemento es Өi (s). De este modo, la salida del elemento con una función de transferencia G1(s) es G1(s) Өi y la salida del elemento con una función de transferencia G2 (s) es G2 (s) Өi (s). En la figura las dos señales se muestran como adición en el punto suma. Por lo tanto, la salida Өo (s) es
Por lo tanto, la función de transferencia global G(s) es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
53
Si las señales se hubieran sustraído en el punto suma, entonces se debería obtener
Y
Ejemplo 17 Un lazo de prealimentación de la forma que muestra la figura 43 tiene funciones de transferencia de G1, (s) = 1/(s +1) y G2 (s) = 5. ¿Cuál es la función de transferencia global si la señal del lazo de prealimentación se suma a la señal de la trayectoria directa?
Respuesta Usando la ecuación [8]
A continuación se muestra una tabla donde se resumen varias reglas utilizadas en el álgebra de bloques.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
54
TABLA 1. ALGEBRA DE BLOQUES

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
55
Lección 2: SIMPLIFICACION DE DIAGRAMAS DE BLOQUES.
2.1 Simplificación de diagramas de bloques
La exposición anterior sólo representa algunos de los métodos de simplificación de diagramas de bloques. Así, varios bloques en serie se pueden reemplazar por un solo bloque, bloques con un lazo de realimentación se pueden sustituir por un solo bloque sin realimentación, y bloques con un lazo de prealimentación se pueden reemplazar por un solo bloque. En la tabla anterior se listan éstos y otros métodos que se pueden utilizar.
Ejemplo 18
Reducir el sistema que describe la figura 44 a un solo bloque y determinar la función de transferencia de ese bloque.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
56
Figura 44 Ejemplo 18
Respuesta La figura 45 muestra cómo se pueden combinar los bloques en varios pasos. Para simplificar las figuras, se ha omitido la indicación de que todas las funciones están en el dominio de s. De esta manera, en a) los dos bloques en serie G1, (s) y G2 (s) se combinan para dar un solo bloque usando la transformación 1 de la tabla 1 vista previamente, con una función de transferencia
En b) el bloque del inciso anterior se combina, usando la transformación 2 de la tabla 1 vista previamente, con el bloque de la realimentación H1 (s) para obtener un solo bloque con una función de transferencia.
Se utiliza el signo negativo porque la realimentación es positiva.
En c) la parte de prealimentación del diagrama se simplifica utilizando la transfor-mación 3 de la tabla 1, para obtener un solo bloque con una función de transferencia

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
57
Figura 45 Ejemplo 18 para combinar bloques
En d) este equivalente del bloque prealimentado se combina con el bloque que se obtuvo en b) con la transformación 1 de la tabla 1, para obtener un solo bloque con una función de transferencia
Por último, en e) este bloque se combina con su lazo de realimentación, utilizando la transformación 2 de la tabla 1, para obtener un solo bloque con una función de transferencia

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
58
La cual se simplifica a
Ejemplo 19 Reorganizar el diagrama de bloques del sistema descrito en la figura 44 de modo que el bloque de realimentación H1 (s) esté aislado y los efectos de los cambios en su función de transferencia se puedan estudiar fácilmente.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
59
Figura 46 Ejemplo 19
Respuesta La figura 46 detalla los pasos del procedimiento que se puede adoptar para aislar el bloque H1 (s). Para simplificar, en las figuras se omitió la indicación de que todos los bloques están en el dominio de s. En a) los dos bloques en serie se combinaron utilizando la transformación 1 de la tabla 1. En b) se eliminó el lazo de prealimentación con la transformación 3 de la tabla 1. En c) el punto de separación 1 se movió después del bloque [G3 (s) + G4 (s)] utilizando la transformación 11 de la misma tabla. En d) los puntos suma 1 y 2 se reacomodaron mediante la

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
60
transformación 9 de la tabla 1. En e) se eliminó el lazo interno de realimentación usando la transformación 2 de la tabla 1. En f) se usó la transformación 4 para remover un bloque del lazo de realimentación y así dar la solución requerida.
Ejemplo 20 Transformar el sistema que muestra la figura 47 en un diagrama de bloques con realimentación unitaria. Hay realimentación unitaria cuando la trayectoria de realimentación H(s) se transforma a una con función de transferencia de realimentación de 1.
Figura 47 Ejemplo 20
Respuesta Con base en la transformación 4 de la tabla 1 se obtiene el sistema que ilustra la figura 48.
Figura 48 Ejemplo 20
2.2 Entradas múltiples
Con frecuencia en los sistemas de control existe más de una entrada al sistema. De este modo, se puede tener la señal de entrada que indica el valor requerido de la variable controlada y también una o varias entradas debidas a perturbaciones que afectan al sistema. El procedimiento para obtener la relación entre las entradas y la salida para esos sistemas es: 1 Hacer las entradas igual a cero, excepto una de ellas. 2 Transformar el diagrama de bloques resultante a uno que sólo tenga una
trayectoria directa y una de realimentación. 3 Determinar, entonces, la señal de salida debida a la entrada que no es igual a
cero. 4 Repetir los pasos 1,2 y 3 para cada una de las entradas en turno.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
61
5 La salida total del sistema es la suma algebraica de las salidas debidas a cada una de las entradas.
La figura 49 muestra un sistema de control básico con una entrada de referencia Өi (s) y una entrada de perturbación Өd (s). Al aplicar el procedimiento anterior se obtiene, igualando Өd (s) a cero y después de alguna simplificación, el diagrama de bloques que se muestra en la figura 50a). Para este sistema la relación entre la entrada Өi (s) y la salida Өo (s), utilizando la transformación 2 de la tabla 1, es
[11]
Figura 49 Sistema de control con entradas múltiples
Ahora, al hacer Өi (s) igual a 0 se obtiene un diagrama de bloques, que se observa en la figura 50b, pero recuerde que este diagrama se simplifica. Debido a que el lazo de realimentación proporciona una señal sustraída de la señal de entrada, es decir, se estaba utilizando realimentación negativa, es necesario representar la función de transferencia del lazo de realimentación como negativa, o sea, -H(s). El sistema resultante es sólo una trayectoria directa con una función de transferencia G2 (s) y una realimentación positiva con una función de transferencia –G1(s)H(s). De este modo, usando la transformación 2 en la tabla 1.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
62
b)
Figura 50 a)Өd(S)=0,b)Өi(S)=0
Así, la salida total del sistema cuando está sujeto a ambas entradas es la suma que se da en las ecuaciones [11] y [12], es decir:
[13]
Vea el capítulo 1 para obtener la ecuación anterior en términos de las señales que pasan a través del sistema. Ejemplo 21 Derivar la ecuación que describe la relación entre las entradas Өi (s), Өd1 (S) y Өd2 (s) al sistema descrito en la figura 51 y la salida Ө0 (s).
Figura 51 Ejemplo 21

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
63
Respuesta Con Өd1 (s) y Өd2 (s) igualadas a cero, la transformación 2 de la tabla 1 da por resultado
Con Өi (s) y Өd2 (s) igualadas a cero, el arreglo es como el que muestra la figura 52a y así
Figura 52 Ejemplo 21
Con Өi (s) y Өd1 (s) igualadas a cero, el arreglo es como el que ilustra la figura 52b) y así

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
64
Por lo tanto, la salida total del sistema es
Lección 3: EJEMPLOS DE SISTEMAS
El motor de cd que se observa en la figura 53 puede tener dos formas de analizarse: controlado por armadura o controlado por campo. La figura 54 muestra estas formas básicas como diagramas de bloques con las ecuaciones que describen las relaciones entre la entrada y la salida a cada bloque, esto fue estudiado en detalle en el curso de sistemas dinámicos.
Figura 53 Motor de cd

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
65
Figura 54 Motor de cd: a) controlado por armadura, b) controlado por campo
Figura 55
Para el motor controlado por armadura (figura 54a), el circuito de armadura tiene una función de transferencia de primer orden que se puede escribir en la forma
Donde es la constante de tiempo para el circuito de armadura, . De manera similar, la función de transferencia para la carga se puede escribir como

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
66
donde es la constante de tiempo para la carga La función de transferencia de la trayectoria directa del sistema es, entonces
La función de transferencia del sistema [w(s)/Va(s)], con su trayectoria de reali-mentación es, entonces, usando la transformación 2 de la tabla 1
[14]
Al reordenar la ecuación [14], se obtiene
Ésta es una ecuación de segundo orden y se puede escribir en la forma
Donde ωn es la frecuencia natural angular y es el factor de amortiguamiento relativo. Por ejemplo, el comportamiento del sistema cuando está sujeto a una entrada escalón o a una entrada rampa es como se describe en el capítulo 5 para sistemas de segundo orden.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
67
Para el motor controlado por campo (figura 54b), el circuito de campo es un sistema de primer orden y la función de transferencia se puede escribir como
donde la constante de tiempo es El sistema que representa la carga es también un sistema de primer orden y su función de transferencia se puede escribir como
donde , es la constante de tiempo para la carga El motor controlado por campo es un sistema en lazo abierto. Por lo tanto, la función de transferencia global ω(s)/vf(s) es
Éste es un sistema de segundo orden. Con motores de cd la perturbación más probable es un par Td a la carga. De esta manera, para tener en cuenta éste par en motores controlados por armadura y por campo se deben modificar los diagramas de bloques como muestra la figura 56. El efecto de la perturbación a la salida del motor controlado por armadura es modificar la salida que indica la ecuación [14] :

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
68
Figura 56 Motor de cd con perturbación de carga: a) controlado por armadura, b) controlado por campo
Un motor de cd se podría usar como parte de un sistema de control de posición, es decir, rotar la carga a un ángulo en particular. Puesto que la velocidad angular w se considera la salida de los motores de cd mencionados es necesario tener en cuenta la adición de un bloque que convierta la velocidad angular a desplazamiento angular. Dado que la velocidad angular es la razón de cambio del desplazamiento angular, es decir, ω=dӨ/dt, entonces
Por lo tanto, en el dominio de s
Donde Ө0 (s) es la salida en el dominio de s. De este modo, el bloque que se adiciona tiene la función de transferencia 1/ s y, por lo tanto para el motor controlado por armadura es como ilustra la figura 57. El lazo de realimentación en este caso es sólo la fuerza contraelectromotriz y, por lo tanto, ésta es una medida de la velocidad angular.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
69
Figura 57 Sistema de control de posición con un motor de cd
El punto de separación para la realimentación está antes del bloque 1/s donde la salida de la carga es la velocidad angular en lugar del desplazamiento angular. El desempeño del sistema de control de posición puede mejorar, desde el punto de vista de control, al incluir una segunda trayectoria de realimentación, si ésta es una medida de la posición angular de la carga, Ө0. La figura 58 muestra el sistema. El sistema de medición podría ser un potenciómetro rotacional o un transformador diferencial de variación angular (RVDT por sus siglas en inglés: rotary variable differential transformer), el cual da un voltaje proporcional a la posición angular. Esta señal de realimentación vm se suma algebraicamente a la señal de voltaje de referencia vr para dar una señal de error. La señal de voltaje de referencia se obtiene de la posición angular que fija un potenciómetro rotacional (vea el capítulo 2 para el análisis del potenciómetro). La señal de error se amplifica y rectifica antes de pasar al sistema con motor de cd. Este sistema de control se puede utilizar para controlar el movimiento de los brazos robot, la posición con máquinas herramientas, etcétera.
Figura 58 Sistema de control de posición ' realimentación de la posición

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
70
Ejemplo 22 Obtener la relación entre las entradas del valor fijado de la altura del líquido hi y la perturbación del nivel del líquido d del sistema de nivel de líquido que describe la figura 59, y la salida de la altura del líquido h0. De esta manera determinar cómo la salida variará con el tiempo cuando existe una entrada escalón al valor fijado, es decir, éste se fija súbitamente a un nuevo valor.
Figura 59 Ejemplo 22
El movimiento de un flotador produce la rotación de una varilla alrededor de un pivote y así, a través del actuador, se ajusta la apertura de la válvula. El punto de ajuste se puede fijar subiendo o bajando el punto de conexión del flotador a la varilla. La señal de error es la diferencia entre la posición del flotador cuando está en el nivel re-querido y cuando se encuentra en cualquier otro nivel. El controlador es la varilla pivoteada cuya entrada, en uno de sus extremos, es la señal de error del flotador y la salida, el punto donde se conecta el actuador. Respuesta Se puede considerar que el sistema tiene un diagrama de bloques como el que muestra la figura 60. La señal de error es la entrada a uno de los extremos de la varilla pivoteada y la salida es el movimiento del otro extremo de la varilla y, por lo tanto, el movimiento del vástago de la válvula. Este movimiento es la entrada al actuador de la válvula que produce la salida de una razón de flujo. Ésta, al sumarse con la perturbación, es la entrada a la planta, es decir, el líquido en el contenedor. La realimentación es el movimiento del flotador, el cual se traduce directamente en una señal de altura, por lo tanto, la trayectoria de realimentación es unitaria.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
71
Figura 60 Ejemplo 22
La siguiente es una consideración de las funciones de transferencia de cada uno de los elementos en el sistema y, por lo tanto, la relación entre las entradas y la salida para el sistema como un todo. a) Varilla pivoteada. La relación entre la salida y la entrada para la varilla pivoteada es Para una entrada h, la salida será z, donde
Así, la función de transferencia es (x/y). b) Sistema válvula. La entrada z al sistema válvula determina la razón de flujo de salida q1 de la válvula. La relación entre la entrada y la salida se puede linealizar (vea el capítulo 2) para obtener
c) La planta. El nivel se controla mediante la manipulación de la razón a la que el agua entra en el tanque. Si el agua entra a una razón de qent por segundo y sale a razón de qsal por segundo, entonces la razón neta a la cual se incrementa el agua en
el tanque es (qent - qsal) En un tiempo el cambio en el volumen del agua en el
tanque será (qent - qsal) . Si el tanque tiene un área de la sección transversal de A,
entonces este cambio en el volumen producirá un cambio en el nivel del agua de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
72
Donde
Por lo tanto
El flujo de salida del tanque se afectará por la altura del agua por arriba de la tubería de salida, es decir, la altura debida a la presión. Puesto que la presión debida a la altura del agua h es proporcional a qsal, se puede escribir:
donde R representa la resistencia hidráulica de la tubería de salida. De este modo
La función de transferencia es, de esta manera,
Donde t = RA y es la constante de tiempo. d) El sistema. Con qd = 0, la trayectoria directa tiene una relación entre la salida y la entrada de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
73
Puesto que la trayectoria de realimentación tiene una función de transferencia unitaria, entonces
Con qi (s) = 0, la trayectoria directa tiene una función de transferencia de R/(ts + 1) y la trayectoria de realimentación una de (x/ y)c. Por lo tanto
De esta manera, para el sistema con ambas entradas
e) Entrada escalón. Considere una entrada escalón al sistema, sin que se presente perturbación. Para esta situación la relación entre la entrada y la salida es
Esta ecuación se puede simplificar si se definen dos constantes a y K como

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
74
Por lo tanto
Una entrada escalón para Hi (s) tiene la transformada de Laplace 1/s, por lo tanto
La ecuación que daría esta transformada (vea el capítulo 4) es
Éste es un crecimiento exponencial para alcanzar el valor en estado estable de K.
Lección 4: ERROR EN ESTADO ESTABLE
Figura 61 Sistema de control en lazo abierto
Figura 62 Sistema de control en lazo cerrado
El error en cualquier sistema es la diferencia entre la señal de salida requerida, es decir, la señal de entrada de referencia que especifica qué se requiere, y la señal de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
75
salida real que se presenta. Para un sistema de control en lazo abierto (figura 61) cuando hay una entrada Ө¡(s) y una salida Өo (s), el error E(s) es, entonces,
Puesto que la función de transferencia G(s) es Ө0 (s)/Ө¡ (s) entonces
De esta manera, el error depende no sólo del sistema, como lo determina su función de transferencia, sino de la forma de la entrada Өi(s). Para un sistema en lazo cerrado, considere la simplificación de un sistema con realimentación unitaria (figura 62). Cuando existe una entrada de referencia Ө¡(S) y una salida real Ө0 (s) entonces la señal que se alimenta de regreso es ӨO (s) y, de esta manera el error E(s) es
Si G(s) es la función de transferencia de la trayectoria directa, entonces si existe realimentación unitaria
Por lo tanto
[2]
De esta forma el error depende del sistema, como especifica su función de transferencia, y de la forma de la entrada, Өi(s). Si el sistema de control en lazo cerrado tiene un lazo de realimentación con una función de transferencia H(s), como en la figura 63a, entonces el sistema se puede convertir en uno con realimentación unitaria mediante el proceso que describe la figura 63b. El resultado es un sistema equivalente con realimentación unitaria de la forma que ilustra la figura 63c. La función de transferencia de la trayectoria directa está entonces dada por:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
76
Al simplificar el sistema mediante su conversión en uno con realimentación unitaria, permite usar la ecuación [2] para el error. A fin de calcular el error en estado estable ess se utiliza el teorema del valor final (recordar transformada de Laplace). El error en estado estable es el valor del error (el cual es una función del tiempo t), cuando todos los transitorios han tenido tiempo para decaer y, por lo tanto, es el valor cuando t tiende a infinito. De acuerdo con el teorema del valor final esta condición está dada por
Así, para un sistema en lazo abierto, según la ecuación [1]
y para un sistema en lazo cerrado con la ecuación [2]

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
77
Figura 63 a) Sistema de control en lazo cerrado, b) conversión en realimentación unitaria, c) sistema equivalente
con realimentación. Ejemplo 23 Calcular la magnitud del error en estado estable para a) un sistema en lazo abierto con una función de transferencia de k /( +1) y b) un sistema en lazo cerrado con realimentación unitaria y una función de transferencia en la trayectoria directa de k I ( S + 1) cuando ambos están sujetos a una entrada escalón unitario de 1 / s.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
78
Respuesta
a) Con base en la ecuación [5]
b) A partir de la ecuación [6]
4.1 Clasificación de sistemas.
El error en estado estable para un sistema depende del valor de
y el valor de E(s) depende de la función de transferencia en la trayectoria directa de un sistema en lazo cerrado cuando hay realimentación unitaria. En el estudio de la clasificación de sistemas es importante considerar que en todos los casos de sistemas en lazo cerrado se supone que están en la forma que se tiene con realimentación unitaria. Los sistemas se clasifican de acuerdo con el valor de la función de transferencia de la trayectoria directa cuando se tiene realimentación unitaria; ésta a menudo se denomina función de transferencia en lazo abierto del sistema en lazo cerrado. Para un sistema con función de transferencia de la trayectoria directa G(s) y lazo de realimentación con función de transferencia H(s), la función de transferencia en lazo abierto G0 (s) está dada por la ecuación [3] como
La función de transferencia en lazo abierto de los sistemas en general se puede representar mediante una ecuación de la forma

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
79
Donde K es una constante, m y n son enteros y ni a0 ni b0 pueden ser cero; q es un entero, el valor que se conoce como el tipo o clase del sistema. De este modo, si q = 0, entonces se dice que el sistema es de tipo 0; si q = 1 entonces es de tipo 1, y si q = 2, entonces es de tipo 2. El tipo es, de esta manera, el número de factores 1Is en la función de transferencia en lazo abierto. Puesto que 1/s es integración, el tipo es el número de integradores en la función de transferencia en lazo abierto.
Figura 64 Ejemplo 24
Ejemplo 24 ¿Cuál es el tipo para los sistemas que se muestran en la figura 64? Respuesta La función de transferencia en lazo abierto se puede calcular con la ecuación [7].

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
80
a) El sistema tiene una función de transferencia en la trayectoria directa de:
En el denominador, si se factorizara s, quedaría como s^0(s+1). El tipo es 0. b) El sistema tiene una función de transferencia en trayectoria directa de
El denominador quedaría factorizado como s^0(s^2+3s+2), por lo tanto, es de tipo 0. c) El sistema tiene una función de transferencia en lazo abierto de
Puesto que no hay término independiente s en el denominador, el tipo es 0. d) El sistema tiene una función de transferencia en lazo abierto de
Puesto que no hay término independiente s en el denominador, el tipo es 0. e) El sistema tiene una función de transferencia en lazo abierto de
Puesto que hay término independiente s2 en el denominador el tipo es 2. f) El sistema tiene una función de transferencia en lazo abierto de
Puesto que no hay término independiente s en el denominador el, tipo es 0.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
81
Lección 5: ERROR EN ESTADO ESTABLE ANTE DIFERENTES ENTRADAS.
5.1 Error en estado estable para una entrada escaló n.
El error en estado estable ess para un sistema en lazo cerrado esta dado por la ecuación [6] como
[9]
donde G0 (s) es la función de transferencia en lazo abierto (recordemos que se trata de la función de transferencia de una planta cuando existe realimentación unitaria). Una entrada escalón unitario es Өi (s) = 1 /s. De esta manera, para tal entrada
La función de transferencia en lazo abierto está dada por la ecuación [8] como
y así, cuando s tiende a cero, la función de transferencia en lazo abierto para un sistema de tipo 0 se convertirá en Ka0 /b0, es decir, una constante, y para todos los otros tipos es infinito. Es más usual representar el valor de la función de transferencia en lazo abierto cuando s —> 0 como una constante Kp, donde Kp se conoce como constante del error de posición y es adimensional.
De este modo, en términos de la ecuación anterior para la función de transferencia en lazo abierto
para un sistema de tipo 0 e infinito para todos los otros tipos.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
82
La consecuencia de esto es que el error en estado estable para un sistema de tipo 0 será 1 / [1 + (Ka0 I b0)] o
y para todos los otros tipos de sistemas será cero. Después de que los transitorios, cualquiera que sea su forma, han desaparecido hay un error en estado estable de la forma 1/(1 + Kp). Lo anterior representa la situación cuando existe una entrada escalón unitario. Si la entrada fue un escalón de magnitud A, entonces el error en estado estable con un sistema de tipo 0 sería A/(1 +Kp). Con un sistema de tipo 0 la magnitud del error en estado estable con una entrada escalón unitario depende del valor de Kp; mientras mayor es su valor menor es el error. Pero Kp es directamente proporcional a K (ecuación [11]). K es el factor por el cual se multiplican las señales al pasar a través de la trayectoria directa del sistema. Por ejemplo, el sistema podría ser como el que ilustra la figura 65. Así, al incrementar el factor de amplificación o ganancia el error en estado estable se puede reducir.
Figura 65 un sistema tipo 0
Ejemplo 25 ¿Cuáles son los errores en estado estable cuando se aplica una entrada escalón unitario a los sistemas dados por las siguientes funciones de transferencia en lazo abierto?

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
83
Respuesta a) El sistema es de tipo 0. Como s —> 0, G0 (s) tiende a 4. Así, Kp = 4 y, de este modo, el error en estado estable es 1 /(1 + 4) = 0.2 unidades. b) El sistema es de tipo 0. Como s —> 0, G0 (s) tiende a 5. Así, Kp = 5 y, de este modo, el error en estado estable es 1 /(1 + 5) = 0.17 unidades. c) El sistema es de tipo 1 y así el error en estado estable es cero. d) El sistema es de tipo 0. Como s —> 0, G0 (s) tiende a 3 / 2. Así. K =3/2 y, de este modo, el error en estado estable es 1/(1+1.5) = 0.4 unidades. e) El sistema es de tipo 2 y así el error en estado estable es cero. 5.2 Error en estado estable para una entrada rampa . El error en estado estable ess para un sistema en lazo cerrado está dado por la ecuación [6] como
donde G0 (s) es la función de transferencia en lazo abierto. Una entrada rampa unitaria es Ө¡ (s) = 1 ls2. Por lo tanto, para dicha entrada
Como s tiende a cero, así el término s en el denominador se convierte en cero. De este modo, el factor que determina la magnitud del error es el valor de sG0 (s) cuando s → 0, es decir, la ecuación [13] se convierte en
[15] Donde Kv es una constante conocida como constante del error de velocidad. Esta tiene las unidades de segundos-1.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
84
[16]
La función de transferencia en lazo abierto Go(s) está dada por la ecuación [8] como
De este modo, el valor de sG0 (s) es
Para un sistema de tipo 0, q = 0, por lo tanto, sk/sq = sK. Así, cuando s tiende a cero, sG0 (s) para un sistema de tipo 0 será cero y entonces Kv es cero. De esta manera, el valor del error en estado estable será 1/0 o infinito. Para un sistema de tipo 1, q=1, por lo tanto, sKlsq = K. Así, cuando s tiende a cero, sG0 (s) se convertirá en Ka0 Ib0, es decir, éste es el valor de Kv. De esta manera, el valor del error en estado estable será 1/KV o 1/(Ka0 lbQ). La figura 66 muestra el tipo de respuesta que podría presentar un sistema de tipo 1. Después de que los transitorios han desaparecido, cualquiera que sea su forma, hay un error en estado estable de 1 /(Kv). Para un sistema de tipo 2, q =2, por lo tanto, sK/sq =K/s. Así, cuando s tiende a cero, sG0 (s) se hace infinito y, por lo tanto, el error en estado estable se hace cero. Lo anterior representa la situación cuando existe una entrada rampa unitaria. Si la entrada es una rampa con una razón de cambio con el tiempo de una constante A entonces el error en estado estable con el sistema de tipo 1 sería A/Kv.
Figura 66 Error en estado estable para una entrada rampa

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
85
Ejemplo 26 ¿Cuáles son los errores en estado estable cuando se aplica una entrada rampa unitaria a los sistemas que tienen las siguientes funciones de transferencia? Éstos son los sistemas usados en el ejemplo anterior.
Respuesta a) El sistema es de tipo 0. Como s→0, sG0(s) tiende a 0. Asi Kv = 0 y, de este modo, el error en estado estable es infinito. b) El sistema es de tipo 0. Como s → 0, sG0 (s) tiende a 0. As Kv = 0 y, de este modo, el error en estado estable es infinito. c) El sistema es de tipo 1. Como s →0, sG0 (s) tiende a 5/5 = 1 s-1 y de este modo, el error en estado estable es de 1 unidad. d) El sistema es de tipo 0. Como s → 0, sG0 (s) tiende a 0. As Kv =0 y, de este modo, el error en estado estable es infinito. e) El sistema es de tipo 2. Como s→ 0, sG0 (s) tiende a infinito así, el error en estado estable es cero. 5.3 Error en estado estable para una entrada parabó lica. El error en estado estable ess para un sistema en lazo cerrado está dado por la ecuación [6] como

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
86
donde G0 (s) es la función de transferencia en lazo abierto. Una entrada parábola unitaria es Өi(s) = 1/s3. De esta manera, para dicha entrada
[17] Como s tiende a cero, el término s2 en el denominador se hace cero. Por lo que, el factor que determina la magnitud del error es el valor de s2G0 (s) cuando s —> 0, es decir, la ecuación [17] se convierte en
[18]
[19]
donde Ka es una constante conocida como constante del error de aceleración y que tiene las unidades de segundos-2.
[20]
La función de transferencia en lazo abierto G0 está dada por la ecuación [8] como
De este modo, el valor de s2G0 (s) es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
87
Para un sistema de tipo 0, q = 0, por lo tanto, s2K/sq = s2K. Así, cuando tiende a cero, s2G0 (s) para un sistema de tipo 0 será cero y Ka es cero. De esta manera, el valor del error en estado estable será 1/0 o infinito. Para un sistema de tipo 1, q =1, por lo tanto, s2Klsq = sK. Así, cuando tiende a cero, s2G0 (s) se hará cero y Ka es cero. De esta manera, el valor del error en estado estable será 1/0 o infinito. Para un sistema de tipo 2, q =2, por lo tanto, s2K/sq =K. Así, cuando tiende a cero, s2Go (s) se convierte en Ka0/bo, es decir, éste es el valor de Ka. De esta forma, el valor del error en estado estable será 1/Ka o1(Ka0/b0). La figura 67 ilustra el tipo de respuesta que se podría presentar con un sistema de tipo 2. Después de que los transitorios, cualquiera que sea su forma, han desaparecido hay un error en estado estable de 1/(Ka). Para sistemas de tipos mayores a 2, cuando s tiende a cero, s2G0 (s) se hace infinito y, por lo tanto, el error en estado estable es cero. Lo anterior representa la situación cuando existe una entrada parábola unitaria. Si la entrada fuera una parábola de la forma A/s3, donde A es una constante, entonces el error en estado estable con el sistema de tipo 2 sería A/Ka.
Figura 67. Error en estado estable entrada parabólica
Ejemplo 27 ¿Cuáles son los errores en estado estable cuando se aplica una entrada parabólica unitaria a los sistemas que tienen las siguientes funciones de transferencia? Éstos son los sistemas mencionados en los ejemplos anteriores.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
88
Respuesta a) El sistema es de tipo 0. Como s→0, s2G0 (s) tiende a 0. Así, Ka = 0 y, de este modo, el error de estado estable es infinito. b) El sistema es de tipo 0. Como s→0, s2G0 (s) tiende a 0. Así, Ka = 0 y, de este modo, el error de estado estable es infinito. c) El sistema es de tipo 1. Como s→0, s2G0 (s) tiende a 0. Así, Ka = 0 y, de este modo, el error de estado estable es infinito. d) El sistema es de tipo 0. Como s→0, s2G0 (s) tiende a 0. Así, Ka = 0 y, de este modo, el error de estado estable es infinito. 5.4 Error en estado estable debido a perturbaciones . Considere el sistema que muestra la figura 68, donde además de la entrada referencia hay una entrada de perturbación. Ambas entradas pueden dar cabida a errores en estado estable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
89
Figura 68 a) Sistema con realimentación unitaria con una perturbación, b) cuando Өd(s) = 0, c) cuando Өi(s) =0
Siguiendo el procedimiento descrito en la lección 2 del presente capítulo, la función de transferencia en lazo abierto se determina para el caso cuando Өd(s) = 0, pero Өi (s) es distinta de cero y se determina también para cuando Өi(s) = 0, pero Өd (s) no es cero, hallando en cada caso el error en estado estable. El error en estado estable cuando ambas entradas son diferentes de cero es, entonces, la suma de los dos errores derivados por separado. De esta manera, para Өd (s) = 0 se tiene

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
90
El error es la diferencia entre la entrada de referencia y la salida del sistema
y así, puesto que G0 (s) = Ө0 (s) /Өi (s),
Por lo tanto, el error en estado estable es
Cuando Өi(s) = 0, entonces el sistema sólo está formado por una trayectoria directa con G2 (s) y una trayectoria de realimentación con G1 (s). Éste se puede convertir en un sistema con realimentación unitaria mediante el método que describe la figura 68, y así, la función de transferencia en lazo abierto es
Así, el error es, puesto que Өi(s) = 0
Por lo tanto, el error en estado estable es
El error total cuando existen ambas entradas, la de referencia y la de perturbación, es la suma de los errores dados por las ecuaciones [21] y [22].

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
91
Ejemplo 28 Un sistema de control de nivel de líquido se puede representar mediante un sistema como el que ilustra la figura 69. ¿Cuál es el error en estado estable cuando el sistema está sujeto a una entrada de perturbación de tipo escalón de magnitud A?
Figura 69 Ejemplo 28
Respuesta La figura 70a muestra al sistema cuando no hay entrada de referencia y sólo existe la entrada de perturbación. La figura 70b ilustra cómo éste se puede reacomodar para dar un sistema con realimentación unitaria. Así, para dicho sistema la función de transferencia en lazo abierto es
Por lo tanto, la salida H(s) se relaciona con la entrada Qd (s) por
Figura 70 Ejemplo 28

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
92
CAPITULO 3: POLOS Y CEROS Y SU RELACION CON LA ESTA BILIDAD DEL SISTEMA
Introducción
En este capítulo se desarrolla con mucho más detalle o dicho de otra forma, de manera más específica los aspectos fundamentales de la estabilidad en un sistema de control, ya que un requerimiento importante para un sistema de control es que debe ser estable; esto significa que si al sistema se aplica una entrada de magnitud finita, debe, incrementarse dentro de un límite; de aquí la necesidad de estudiar los requerimientos o condiciones que se deben satisfacer para sistemas estables. Para sistemas lineales el requerimiento de estabilidad se puede definir en términos de los polos de la función de transferencia en lazo cerrado, aquí haremos el análisis detallado de la influencia de los polos en la estabilidad de los sistemas de control.
Lección 1: QUÉ ES LA ESTABILIDAD
Un sistema se puede definir como estable si toda entrada acotada, es decir, finita, produce una salida acotada. De esta manera, por ejemplo, para toda entrada escalón aplicada a un sistema la salida debe ser finita. Un sistema no es necesariamente estable si una sola entrada escalón produce una salida finita: toda entrada escalón debe producir salidas finitas. De manera alternativa, un sistema se puede definir como estable si al estar sujeto a una entrada impulso la salida tiende a cero a medida que el tiempo tiende a infinito. Si, al responder a la entrada impulso, la salida del sistema tiende a infinito a medida que el tiempo tiende a infinito, entonces el sistema es inestable. Sin embargo, si la salida no tiende a cero o no crece a infinito, pero tiende a un valor finito diferente de cero, se dice entonces que el sistema es crítica o marginalmente estable. El capítulo 1 proporciona el ejemplo del sistema de una esfera sobre la superficie de una vasija. Si la esfera está dentro de la vasija, entonces es estable puesto que después de un impulso, la esfera terminaría, a medida que el tiempo tiende a infinito, en la misma posición: el centro de la vasija. Si la esfera está sobre la superficie convexa de la vasija (puesta al revés), entonces el impulso causaría que la esfera caiga y no regrese a su posición original a medida que el tiempo tiende a infinito. Este sistema es inestable. Si la esfera estuviera sobre una superficie plana, entonces el impulso produciría en ella un movimiento a lo largo de la superficie y, a medida que el tiempo tiende a infinito, iría hacia el reposo en una posición estable a cierta distancia de su punto de inicio. Este sistema es crítica o marginalmente estable.
Ejemplo 29 ¿Cuáles de los siguientes sistemas son estables? a) Una entrada escalón al sistema produce una salida que se puede describir mediante la ecuación Ө0 = 2t.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
93
b) Una entrada escalón al sistema produce una salida que se puede describir mediante la ecuación ӨO = 5. c) Un impulso aplicado al sistema produce una salida que se puede describir mediante la ecuación Ө = e-t. d) Un impulso aplicado al sistema produce una salida que se puede describir mediante la ecuación Ө = et. Respuesta a) La figura 71a muestra la forma de la salida. Puesto que se incrementa y no se acota, el sistema es inestable.
b) La figura 71b ilustra la forma de la salida. Puesto que ésta se acota, es decir, es finita el sistema es estable.
c) La figura 71c describe la forma de la salida. Puesto que con el tiempo ésta se hace cero, es decir, tiende a cero a medida que el tiempo tiende a infinito, el sistema es estable.
d) La figura 71d muestra la forma de la salida. Puesto que continúa incrementándose y no se acota a medida que el tiempo tiende a infinito, el sistema es inestable.
Figura 71 Ejemplo 29

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
94
POLOS Y CEROS
La función de transferencia en lazo cerrado G(s) de un sistema en general se puede representar mediante
y, si las raíces del denominador y del numerador se establecen como
Donde las raíces del numerador son z1, z2,..., zm y se denominan ceros y las raíces del denominador son p1, p2,..., pn y se denominan polos, K es una constante multiplicadora o la ganancia del sistema. Los ceros son los valores de s para los cuales la función de transferencia se convierte en cero. Los polos son los valores de s para los cuales la función de transferencia es infinita, es decir, éstos hacen que el valor del denominador sea cero. De esta manera, si el numerador es (s-2), entonces la función de transferencia es cero si (s - 2) = 0, es decir, s = 2. Por lo tanto, el cero está en 2. Si el denominador es (s + 5), entonces la función de transferencia es infinita si (s + 5) = 0, es decir, s = -5. Por lo tanto, el polo está en -5.
Los polos y los ceros pueden ser cantidades reales o complejas. Así, por ejemplo, si el denominador fuera (s2 - 6s + 8), entonces, debido a que esto es (s - 4)(s - 2), los polos están en +4 y +2. Sin embargo, si el denominador fuera (s2 +1), entonces, puesto que éste se puede escribir como (s - j)(s + j), los polos están en +j y -j. En general, los polos y los ceros se pueden escribir como
donde es la parte real y jω es la parte imaginaria. Como indica la ecuación [2], enunciar los valores de los ceros y de los polos de un sistema, junto con el valor de una ganancia K, permite especificar por completo la función de transferencia del sistema.
Ejemplo 30 ¿Cuáles son los ceros y polos de los sistemas dados por las siguientes funciones de transferencia en lazo cerrado?

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
95
Respuesta a) El denominador se puede escribir como (s-2) (s-2) y así los polos están +2 y +2. El numerador es (s- 1) y así, el cero esta a +1. b) El denominador es (s + 1) (s+2) (s - 3) y así, los polos están en -1, -2 y +3. El numerador es 2 (s +1) y así, el cero está en -1 c) El denominador es (s - 0) (s + 2) (s + 3) (s - 4) y así, los polos están en 0, -2, -3 y +4. El numerador es (s + 3) (s -1) y así, los ceros está en -3 y +1. d) El denominador es (s2 + 1s + 3). Las raíces se pueden obtener mediante la ecuación de las raíces m de una ecuación cuadrática (ax2 +bx + c=0) es decir,
Por lo tanto, los polos de (s2 +1s + 3) son
Por lo tanto, los polos están en (-0.5 +jl.7) y (-0.5 -jl.7). El numerador es (s + 4) y, de este modo, el cero está en -4.
e) El denominador es (s^2 +s +1). Según la expresión anterior para el cálculo de las raíces

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
96
Por lo tanto, los polos están en (-0.5 + j0.87) y (-0.5 – j0.87). El numerador es 1, una constante y, por lo tanto, no hay ceros. Ejemplo 31 ¿Cuáles son las funciones de transferencia de los sistemas que tienen los siguientes polos y ceros? a) Polos en -1, -2; sin ceros. b) Polos en +1, -2; cero en 0. c) Polos en (-2 ± j); cero en +1. d) Polos en (1 ± j2); cero en -1. Respuesta a) El denominador será (s + 1)(s + 2) y el numerador 1 (en ausencia de cualquier
información sobre la ganancia K). Por lo tanto
b) El denominador será (s-1)(s + 2) y el numerador (S-0). Por lo tanto
c) El denominador será
El numerador es (s -1), y de esta manera

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
97
d) El denominador será
El numerador es (s +1) y, de esta manera
Lección 2: PATRÓN DE POLOS Y CEROS
Los polos y los ceros de una función de transferencia se pueden representar en un diagrama llamado el patrón de polos y ceros. La figura 72 ilustra los ejes que se usan para dicha gráfica. El eje x es la parte real del polo o cero y el eje y, la parte imaginaria. La posición de un polo se marca con una cruz ' x' y la posición de un cero con un pequeño círculo 'o'. De esta manera, en la figura se marca un polo que tiene una parte real de -1 y una parte imaginaria de +1, es decir, el polo está en (-1 + j). El cero se marca en +1, y no tiene parte imaginaria. La gráfica en dos dimensiones se conoce como plano s. Los polos o ceros en el lado izquierdo de la gráfica son todos negativos, los polos o ceros en el lado derecho son positivos. Los polos o ceros son reales o pares del tipo (σ±jω). Ejemplo 32 Dibujar los patrones de polos y ceros para los sistemas que tienen los siguientes polos y ceros. a) Polos en -2, +3; cero en +1. b) Polos en 0, -1, -2; cero en -3. c) Polos en -1 ± j2; cero en -1. d) Polos en -2 + j, 0; ceros en -3 ± j2. Respuesta Vea la figura 73.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
98
Figura 72 Patrón de polos y ceros
Figura 73 Ejemplo 32

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
99
Lección 3: ESTABILIDAD Y POLOS
La estabilidad de un sistema se puede determinar considerando cómo cambia la salida con el tiempo después de una entrada impulso. Con un sistema estable la salida deberá tender a cero con el tiempo, y con un sistema inestable la salida crecerá con el tiempo. Considere un sistema sin ceros y un polo en -2. La función de transferencia G(s) será
Por lo tanto, la salida Ө0 (s) está relacionada con la entrada Өi (s) mediante
Si el sistema está sujeto a un impulso unitario, entonces Өi (s) = 1 y, de esta manera
Ésta es una transformada de Laplace de la forma 1/(s + a) y así, la transformada inversa da por resultado
El valor de e-2t decrece con el tiempo, haciéndose cero en un tiempo infinito. Por lo tanto, el sistema es estable. Ahora considere un sistema sin ceros y un polo en +2. La función de transferencia G(s) será
Por lo tanto

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
100
Para un impulso unitario, Өi (s) = 1 y, de esta manera
Ésta es una transformada de Laplace de la forma 1/(s + a) y así, la transformada inversa da por resultado
A medida que t se incrementa, el valor de e2t también se incrementa, por lo tanto, el sistema es inestable. Considere otro ejemplo, esta vez con polos en (-2 ± j1) y sin ceros. La función de transferencia es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
101
Figura 74 Patrones de polos y ceros y estabilidad, región de estabilidad compartida, a) Polo en -2 sin ceros: estable, b) Polo en +2 sin ceros: inestable, c) Polos en -2 ± j1 sin ceros: estable.
De acuerdo a lo anterior, la salida se describe como:
Así, cuando hay un impulso unitario Өi (s) = 1 y, de esta manera

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
102
Ésta es una transformada de Laplace de la forma 1/[(s + a)(s + b)] así la transformada inversa es de la forma
El término entre los paréntesis es sen t. Por lo tanto
Ésta es una onda senoidal, la cual tiene una amplitud que decrece con el tiempo de acuerdo con e-2t. De esta manera, la salida decae con el tiempo y, por lo tanto, el sistema es estable. En general, cuando a un sistema se le aplica un impulso, la salida es de la forma de una suma de términos exponenciales. Si sólo uno de los términos exponenciales es una exponencial creciente, es decir, la exponencial de una función positiva de t tal como e2t, entonces la salida crece de manera continua con el tiempo y el sistema es inestable. Esta situación se producirá si uno de los polos tiene parte real positiva y, de esta manera, el denominador de la función de transferencia incluye un término (s - a). Cuando existen pares de polos que involucran ±jω entonces la salida es siempre una oscilación. Esta oscilación es estable si la parte real del par de polos es negativa e inestable si es positiva. De esta manera, si todos los polos están en el lado izquierdo del patrón de polos y ceros, el sistema es estable. Si sólo uno de los polos está en el lado derecho de dicho patrón, éste es inestable. Un sistema es críticamente estable si uno o más polos están sobre el eje vertical del patrón de polos y ceros, es decir, tienen parte real cero, y no hay polos en el lado derecho. La figura 74 muestra las posiciones de los polos para los ejemplos anteriores y la figura 75 ilustra la forma general que toman las salidas para diferentes posiciones de los polos. Si sólo interesa la estabilidad, los polos de la función de transferencia son importantes y los valores de los ceros del sistema son irrelevantes.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
103
Figura 75 Salidas para diferentes posiciones de los polos con una entrada impulso
Una alternativa para el análisis de estabilidad anterior es considerar la estabilidad en términos de cómo cambia la salida con el tiempo después de una entrada escalón. Esto es una entrada acotada y para un sistema estable debería haber una salida acotada. Para la estabilidad en relación con las posiciones de los polos resulta la misma condición. La figura 76 indica las formas generales que toman las salidas para las diferentes posiciones de los polos.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
104
Figura 76 Salidas para diferentes posiciones de los polos con una entrada escalón
Ejemplo 33 ¿Cuáles de los siguientes sistemas son estables, críticamente estables e inestables? a) Polo en -4; cero en +1. b) Polo en +1; sin ceros. c) Polos en 0,-1, -2; cero en +1. d) Polos en (-2 ± j3); sin ceros. e) Polos en (1 ± j2); cero en -2. Respuesta Los valores de los ceros son irrelevantes. Para estabilidad todos los polos deben tener partes reales negativas. De este modo, a y d son estables. Para estabilidad crítica uno o más polos deben tener partes reales cero y ninguna debe ser positiva. Así, c es críticamente estable. Para inestabilidad uno o más de los polos deben tener partes reales positivas, de esta manera b y e son inestables.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
105
Lección 4: EL CRITERIO DE ESTABILIDAD DE ROUTH – HU RWITZ
Determinar la estabilidad de un sistema dada su función de transferencia implica también determinar las raíces del polinomio del denominador de la función y considerar si cualesquiera de éstas son o no positivas. Sin embargo, las raíces no se pueden obtener con facilidad si el polinomio del denominador es de la forma
[4]
y n es mayor que 3 o 4. El criterio de Routh-Hurwitz, sin embargo, presenta un método que se puede usar en tales situaciones. La primera prueba que se aplica es revisar los coeficientes, es decir, los coeficientes de los términos en la expresión anterior. Si éstos son todos positivos y ninguno es cero, entonces el sistema puede ser estable. Si cualesquiera de los coeficientes es negativo, entonces el sistema es inestable. Si cualesquiera de los coeficientes es cero, entonces, en el mejor de los casos, el sistema es críticamente estable De este modo, por ejemplo, el denominador (s3 +2s2 + 3s + 1) puede ser estable puesto que todos los coeficientes están presentes (es decir, existen términos para s^3, s^2, s y s^0 no falta ninguno) y son positivos. Sin embargo, (s3 -2s2 +3s + 1) es inestable debido a que hay un coeficiente negativo. Con (s3 + 2s2 + 3s) falta un término y así, en el mejor de los casos, el sistema es críticamente estable. Para sistemas que tienen denominadores que podrían ser estables se lleva a cabo una segunda prueba. Los coeficientes de la ecuación [4] se escriben en un orden particular denominado arreglo de Routh. Éste es
Los renglones adicionales en el arreglo se determinan mediante cálculo a partir de los elementos de los dos renglones inmediatamente anteriores. Los renglones subsecuentes se calculan hasta que sólo aparecen ceros. El arreglo debería contener, entonces, (n +1) renglones, un renglón corresponde a cada uno de los términos sn hasta s°. La figura 77 ilustra la manera como se calculan los coeficientes del arreglo de Routh-Hurwitz

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
106
Figura 77 Determinación de los elementos en el arreglo Routh
Los elementos del tercer renglón se obtienen a partir de los elementos de los dos renglones previos mediante

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
107
Los elementos del cuarto renglón se obtienen a partir de los elementos de los dos renglones previos mediante
Cuando el arreglo se ha completado, éste se revisa. Si todos los elementos de la primera columna son positivos, significa que todas las raíces del denominador de la función de transferencia (raíces de la ecuación característica) tienen partes reales negativas, y están en el lado izquierdo del patrón de polos y ceros; el sistema es entonces estable si todos los elementos de la primera columna son positivos. Si en la primera columna hay elementos negativos, el número de cambios de signo en la primera columna es igual al número de raíces con partes reales positivas. Recordemos que al polinomio del denominador de una función de transferencia se le llama ecuación característica.
Ejemplo 34
Los siguientes polinomios son los denominadores de las funciones de transferencia de varios sistemas. Por inspección, ¿cuáles de éstos podrían ser estables, inestables y críticamente estables? a)s4 +3s3 +2s + 3 b)s3 + 2s2 + 3s + 1 c)s5 -4s4 + 3s3 +2s2 +5s + 2 d)s5 + s4 + 5s3 +2s2 + 3s + 2 e)s5 + 2s3 +3s2 +4s + 5 Respuesta Los polinomios b y d pueden ser estables debido a que todos los coeficientes son positivos y ninguno es cero. El polinomio c es inestable puesto que hay un término negativo. Los polinomios a y e son, en el mejor de los casos, críticamente estables. Ejemplo 35 Usar el arreglo de Routh para determinar si el sistema que tiene la siguiente función de transferencia es o no estable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
108
Respuesta El denominador es (s4 + 2s3 + 3s2 + 4s +1) y por inspección todos los coeficientes son positivos y no falta ninguno. Por lo tanto, podría ser estable. A fin de asegurar que es estable, entonces se tiene que usar el arreglo de Routh. Los dos primeros renglones el arreglo son:
Los elementos del tercer renglón del arreglo se calculan usando ecuaciones [5] y [6].
De esta manera, el arreglo se convierte en
Los elementos del cuarto renglón del arreglo se calculan usando las ecuaciones [7] y [8].

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
109
De esta manera, el arreglo se convierte en
El elemento del quinto renglón se calcula usando
De esta manera, el arreglo se convierte en
Si revisamos, podemos ver que todos los elementos de la primera columna son positivos y, por lo tanto el sistema es estable. Ejemplo 36 Con base en el arreglo de Routh determinar si el sistema que tiene la siguiente función de transferencia es o no estable:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
110
Respuesta El denominador es (s4 + s3 + s2 + 4s +1) y por inspección todos los coeficientes son positivos y no falta ninguno. Por lo tanto, podría ser estable. A fin de asegurar que es estable, se tiene que usar el arreglo de Routh. Los dos primeros renglones del arreglo son
Los elementos del tercer renglón del arreglo se calculan usando las ecuaciones [5] y [6].
y
De esta manera, el arreglo se convierte en
Los elementos del cuarto renglón del arreglo se calculan usando las ecuaciones [7] y [8].

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
111
y
De esta manera el arreglo se convierte en
El elemento del quinto renglón se calcula usando
De esta manera, el arreglo se convierte en
La primera columna tiene un elemento negativo y, por eso, el sistema es inestable. Hay dos cambios de signo, de más a menos y de menos a más, así, el sistema tiene dos polos con partes reales positivas.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
112
Ejemplo 37 El denominador de la función de transferencia de un sistema es
s3 + 4s2 +8s + K ¿En qué intervalo de valores puede estar K si el sistema debe ser estable? Respuesta Los dos primeros renglones del arreglo de Routh son
Los elementos del tercer renglón del arreglo se calculan usando las ecuaciones [5] y [6].
De esta manera, el arreglo se convierte en
El elemento del cuarto renglón del arreglo se calcula usando la ecuación [7].

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
113
Por lo tanto, el arreglo se convierte en
Para que el sistema sea estable todos los elementos de la primera columna deben ser positivos. Esto significa que
y
Esto significa que (8 - K/4)>0 y, por lo tanto, 32 > K. De esta manera, K debe estar entre 0 y 32. Repasar inecuaciones del curso de álgebra, trigonometría y geometría analítica Ejemplo 38 Para el sistema que describe la figura 78, ¿qué intervalo de valores de K dará como resultado la estabilidad del sistema? Respuesta La función de transferencia global está dada por

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
114
Figura 78 Ejemplo 38
y así, puesto que la función de transferencia de la trayectoria directa es l0/[s(s + l)(s + 4)], la función global será:
Por lo tanto, el arreglo de Routh para el denominador es
Para que la primera columna sólo tenga valores positivos se debe tener
Esto significa que K debe estar entre 0 y 2.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
115
Lección 5: ESTABILIDAD RELATIVA La construcción del arreglo de Routh y la aplicación del criterio de que la primera columna del arreglo sólo debe contener términos positivos, permite decidir si el sistema tiene o no todas sus raíces en el semiplano izquierdo del plano s y, que de esta manera, el sistema sea o no estable. Sin embargo, a menudo esto es útil para saber qué tan cerca de la inestabilidad está un sistema estable. Para lograrlo es ne-cesario saber qué tan cerca del eje imaginario están las raíces. Esto se puede hacer recorriendo el eje a la izquierda una cantidad definida (vea la figura 79) y encontrar si el corrimiento da o no por resultado un sistema inestable medido a partir del nuevo eje. Recorrer el eje a -σ significa que todos los valores de s del denominador de la función de transferencia se reemplacen por (r-σ) y se aplica la prueba de estabilidad.
Figura 79 Corrimiento del eje Ejemplo 39 ¿Un sistema con función de transferencia con el siguiente denominador tendrá raíces cerca del eje situado en -1?
Respuesta Si el sistema es o no estable se puede probar mediante la construcción del arreglo de Routh. Esto es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
116
Y, de esta manera, el sistema es estable. Si ahora se recorre el eje a-1, entonces se reemplaza s por (r -1).
Esto es
Después de simplificar se obtiene
El arreglo de Routh para esta ecuación es
El sistema es inestable. Dado que sólo hay un cambio de signo, sólo hay una raíz a la derecha de la línea en — 1.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
117
FUENTES DOCUMENTALES Chi-Tsong, Chen. (1999) Linear System Theory And Design. Oxford University Press. Third Edition. New
York (USA).
Bolton, W. (2001) Ingeniería de Control. Alfaomega 2ª. Edición.
Kuo Benjamín C. (1997) Sistemas Automáticos de Control. Compañía Editorial Continental S.A. México.
Brogan, W. L. (1985) Modern Control Theory. Prentice Hall. New York.
Katsuhico, Ogata. (2008) Ingeniería de Control Modern. Pearson Prentice. 4ª. Edición. Webgrafia: Diseño en el Espacio de Estados. Tomado el 28 de enero del 2010 de la fuente
http://www.ib.cnea.gov.ar/~dsc/capitulo8/Capitulo8.htm

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Nombre de la Unidad DISEÑO E IMPLEMENTACION DE SISTEMAS DE CONTROL.
Introducción Comoprocesos a controlar se hacen más complejos, sistemas que deben controlar múltiples variables simultáneamentepara generar múltiples salidas;tiene la responsabilidad de diseñar los procesos de automatización lo suficientemsatisfacer la necesidad de la industria. sistemas automatizacióncona dacondise deben controlar múltiples variables simultáneamentehizo necesario otras herramientas de análisis y diseño de sistemas de control complejos basados en el concepto de estado, lo cual es evidentemente un análisis los sistemas pero nos permite modelar matemáticamente plantas mucho más complejas.
Mientras la teoría de control convencional se basa en la relación entrada salida, como se analiza los sistemas de control en la primera parte de este mcontrol moderna se basa en la descripción de las ecuaciones de un sistema en términos de n ecuaciones diferenciales de primer orden, que se combinan en una ecuación diferencial vectorial de primer orden. la notación matricial simplifrepresentación matemática de los sistemas de ecuaciones. El incremento en el número de variables de estado, de entradas o de salidas no aumenta la complejidad de las ecuaciones. De hecho, el análisis de sistemas complicados con múltiplrealiza mediante el procedimiento solo ligeramente más complicado que los requeridos para el análisis de sistemas de ecuaciones diferenciales escalares de primer orden.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
UNIDAD 2
DISEÑO E IMPLEMENTACION DE SISTEMAS DE CONTROL.
Como ya se ha mencionado en este móduloprocesos a controlar se hacen más complejos, sistemas que deben controlar múltiples variables simultáneamentepara generar múltiples salidas; por lo tantotiene la responsabilidad de diseñar los procesos de automatización lo suficientemente robustos, capaces satisfacer la necesidad de la industria. sistemas más útiles aunque no robustos, en el área de la automatización, son los controles PID. Lontroles PID encuentra su aplicabilidad e la mayoría de los sistemas de control. S
da cuando el modelo matemático de lonoce y, por lo tanto, no se pueden empiseño analíticos. Ya para sistemas más complejos donde
se deben controlar múltiples variables simultáneamentehizo necesario otras herramientas de análisis y diseño de sistemas de control complejos basados en el concepto de estado, lo cual es evidentemente un análisis los sistemas pero nos permite modelar matemáticamente lantas mucho más complejas.
Mientras la teoría de control convencional se basa en la relación entrada salida, como se analiza los sistemas de control en la primera parte de este módulo; lacontrol moderna se basa en la descripción de las ecuaciones de un sistema en términos de n ecuaciones diferenciales de primer orden, que se combinan en una ecuación diferencial vectorial de primer orden. la notación matricial simplifica enormemente la representación matemática de los sistemas de ecuaciones. El incremento en el número de variables de estado, de entradas o de salidas no aumenta la complejidad de las ecuaciones. De hecho, el análisis de sistemas complicados con múltiples entradas y salidas se realiza mediante el procedimiento solo ligeramente más complicado que los requeridos para el análisis de sistemas de ecuaciones diferenciales escalares de primer orden.
118
DISEÑO E IMPLEMENTACION DE SISTEMAS DE
dulo, cada día los procesos a controlar se hacen más complejos, sistemas que deben controlar múltiples variables simultáneamente
por lo tanto, la Ingeniería tiene la responsabilidad de diseñar los procesos de
ente robustos, capaces de satisfacer la necesidad de la industria. Uno de los
útiles aunque no robustos, en el área de la La utilidad de los en forma general Su mayor uso se la planta no se plear métodos de
Ya para sistemas más complejos donde se deben controlar múltiples variables simultáneamente se hizo necesario otras herramientas de análisis y diseño de sistemas de control complejos basados en el concepto de estado, lo cual es evidentemente un análisis dinámico de los sistemas pero nos permite modelar matemáticamente
Mientras la teoría de control convencional se basa en la relación entrada salida, como se analiza los sistemas de
dulo; la teoría de control moderna se basa en la descripción de las ecuaciones de un sistema en términos de n ecuaciones diferenciales de primer orden, que se combinan en una ecuación diferencial vectorial de primer orden. El uso de
ica enormemente la representación matemática de los sistemas de ecuaciones. El incremento en el número de variables de estado, de entradas o de salidas no aumenta la complejidad de las ecuaciones. De hecho, el análisis de
es entradas y salidas se realiza mediante el procedimiento solo ligeramente más complicado que los requeridos para el análisis de sistemas de ecuaciones diferenciales escalares de primer

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Justificación El Ingesólidos, la planeación, el diseño y la implementación de Sistemas de Control, que le permitan determinar los procesos de automatización necesarios a aplicar en un área Industrial o donde sea requerido.
Intencionalidades Formativas
Se busca en esta Unidad que el estudiante desarrolle las habilidades y destrezas lo suficiente como para que se haga competente en el área básica de control y automatización.
Denominación de capítulos
Capitulo Cuatro: CONTROLADORES PID.Capitulo CONTROL MEDIANTE LA RESPUESTA EN FRECUENCIA.
Capitulo Seis:
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
El Ingeniero Electrónico debe conocer, con argumentos sólidos, la planeación, el diseño y la implementación de Sistemas de Control, que le permitan determinar los procesos de automatización necesarios a aplicar en un área Industrial o donde sea requerido. Se busca en esta Unidad que el estudiante desarrolle las habilidades y destrezas lo suficiente como para que se haga competente en el área básica de control y automatización. Capitulo Cuatro: DISEÑO DE SISTEMAS DE CONTROLADORES PID. Capitulo Cinco: ANALISIS DE SISTEMAS DE CONTROL MEDIANTE LA RESPUESTA EN FRECUENCIA.
Capitulo Seis: ANALISIS EN ESPACIO DE ESTADOS.
119
niero Electrónico debe conocer, con argumentos sólidos, la planeación, el diseño y la implementación de Sistemas de Control, que le permitan determinar los procesos de automatización necesarios a aplicar en un
Se busca en esta Unidad que el estudiante desarrolle las habilidades y destrezas lo suficiente como para que se haga competente en el área básica de control y
DE SISTEMAS DE
DE SISTEMAS DE CONTROL MEDIANTE LA RESPUESTA EN
ANALISIS EN ESPACIO DE ESTADOS.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
120
CAPITULO 4: DISEÑO DE SISTEMAS DE CONTROLADORES PID .
Introducción
En la actualidad más de la mitad de los controladores industriales utilizan esquemas de control PID o PID modificado. Como la mayoría de los controladores PID se ajustan en el sitio, en la literatura se han propuesto muchas reglas de sintonización, que permiten llevar a cabo una sintonización automática en línea.
La utilidad de los controles PID encuentra su aplicabilidad en forma general a la mayoría de los sistemas de control. Su mayor uso se da cuando el modelo matemático de la planta no se conoce y, por lo tanto, no se pueden emplear métodos de diseño analíticos. En el campo de los sistemas para control de procesos, es un hecho bien conocido que los esquemas de control PID básicos y modificados han demostrado su utilidad para aportar un control satisfactorio, aunque en muchas situaciones específicas no aporten un control óptimo. En esta sección se presenta en primer lugar el control proporcional, luego un controlador PID, especificando la acción que cumple cada uno de los controles (proporcional, integral derivativo). Se continúa con la técnica para la sintonía de reguladores.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
121
Lección 1: CONTROL PROPORCIONAL
Con el control proporcional la salida del controlador es directamente proporcional a su entrada; la entrada es la señal de error, e, la cual es una función del tiempo. De esta manera
Donde Kp es una constante llamada ganancia proporcional. La salida del controlador depende sólo de la magnitud del error en el instante en el que se considera. La función de transferencia, Gc (s) para el controlador es, por lo tanto
El controlador es, en efecto, sólo un amplificador con una ganancia constante. En cierto tiempo, un error grande produce una salida grande del controlador. La ganancia constante, sin embargo, tiende a existir sólo sobre cierto rango de errores que se conoce como banda proporcional. Una gráfica de la salida contra el error sería una línea recta con una pendiente de Kp en la banda proporcional (figura 80).
Figura 80 Control proporcional
Es común expresar la salida del controlador como un porcentaje de la posible salida total de éste. De este modo, un 100% de cambio en la salida del controlador corresponde a un cambio en el error desde un extremo a otro de la banda proporcional. Así
[3]
Debido a que la salida es proporcional a la entrada, si la entrada al controlador es un error en la forma de un escalón, entonces la salida es también un escalón, y es exactamente una versión a escala de la entrada (figura 81). Esto es provisto por el controlador si opera dentro de su banda proporcional.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
122
El control proporcional es sencillo de aplicar, en esencia sólo se requiere alguna forma de amplificador. Éste podría ser un amplificador electrónico o un amplificador mecánico en forma de palanca (vea más adelante en este capítulo); el control proporcional es de la forma que describe la figura 82. El resultado es una función de transferencia en lazo abierto de
Donde Gp (s) es la función de transferencia de la planta. La principal desventaja del sistema es que el controlador no introduce un término 1/s integrador en la trayectoria directa. Esto significa que si el sistema fuera de tipo 0, entonces el controlador no cambiaría y seguiría siendo de tipo 0 con los consecuentes errores en estado estable. El controlador no introduce nuevos ceros o polos al sistema, sólo determina la ubicación de los polos en lazo cerrado. Esto se debe a que la función de transferencia en lazo cerrado es, con el controlador, y la realimentación unitaria:
[4] y, de esta manera, la ecuación característica (1 + KpGp (s)) tiene los valores de sus
raíces afectados por Kp .
Figura 81 Sistema con control proporcional
Figura 82 Sistema con control proporcional

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
123
Ejemplo 40 Si la planta de la figura 82 tiene una función de transferencia de
y se usa un control proporcional, ¿cuál será a) el tipo de sistema, b los errores en estado estable cuando se usa con i) una entrada escalón, ii) una entrada rampa? Respuesta a) El sistema tendrá una función de transferencia en lazo abierto de
De este modo, el sistema es de tipo 1. Vea el capítulo 2 para mayor detalle.
b) i) El error en estado estable, ess, está dado por
donde, para una entrada escalón θi(s) =1/s. Así
Así, para una entrada escalón un sistema de tipo 1 tiene un error en estado estable cero.
ii) Para una entrada rampa, la entrada es 1/s2 y el error en estado estable es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
124
Control integral
Con el control integral la salida del controlador es proporcional a la integral de la señal de error e con el tiempo, es decir.
[5]
donde K¡ es la constante denominada ganancia integral. Ésta tiene unidades de s-1. La figura 83 muestra qué pasa cuando el error es de la forma de un escalón. La integral entre 0 y t es, de hecho, el área bajo la gráfica del error entre 0 y t. Así, debido a que después de que el error comienza, el área se incrementa en una razón regular, la salida del controlador se debe incrementar en una razón regular. La salida en cualquier tiempo es, entonces, proporcional a la acumulación de los efectos de los errores pasados.
Figura 83 Control integral
Al tomar la transformada de Laplace, da por resultado la función de transferencia, para el controlador integral, de
[6]
Así, para el sistema de la forma que se ilustra en la figura 84, el control integral da una función de transferencia de la trayectoria directa de {Ki /s)Gp (s) y, por lo tanto, una función de transferencia en lazo abierto de
[7]
Una ventaja del control integral es que la introducción de un término s en el denominador incrementa el tipo de sistema en 1. De esta manera, si el sistema hubiera sido de tipo 0, el error en estado estable que se habría presentado con la entrada escalón desaparecería cuando se presentara el control integral. Una

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
125
desventaja del control integral es que el término (s - 0) en el denominador significa que se ha introducido un polo en el origen. Puesto que no se introducen ceros, la diferencia entre el número de polos n y de ceros m se incrementa en 1. Una consecuencia de lo anterior es que los ángulos de las asíntotas de los lugares geométricos de las raíces decrecen, es decir, éstas apuntan más hacia el semiplano derecho del plano s y, de este modo, se reduce la estabilidad relativa.
Figura 84 Control integral
Ejemplo 41 Si la planta de la figura 84 tiene una función de transferencia de
y se usa un control integral, ¿cuál será a) el tipo de sistema, b) los errores en estado estable cuando se usa con i) una entrada escalón, ii) una entrada rampa y c) cómo se compara la estabilidad con la que se presentaría si hubiera control proporcional (como en el ejemplo 40)? Respuesta a) El sistema tendrá una función de transferencia en lazo abierto de
Por lo tanto, el sistema es de tipo 2. Vea el capítulo 2 para mayor detalle. b) i) El error en estado estable, ess, está dado por:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
126
donde, para una entrada escalón Өi (s) = 1/s. Así
De este modo, para una entrada escalón un sistema de tipo 2 tiene un error en estado estable cero.
ii) Para una entrada rampa, la entrada es 1/s2 y el error en estado estable es
De esta manera, para una entrada rampa hay un error en estado estable cero, lo cual mejora la situación del ejemplo 40, donde se tenía un control proporcional.
c) Para la situación del control proporcional del ejemplo 40 el sistema tenía una función de transferencia de
La ecuación característica es de esta manera
El arreglo de Routh para éste es
En la primera columna todos los términos son positivos, si Kp es mayor que 0.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
127
Para la situación del control integral el sistema tiene una función de transferencia de
La ecuación característica es, entonces
El arreglo de Routh es
De este modo, un cambio de control proporcional a control integral, en esta instancia, da por resultado la inestabilidad. La figura 85 muestra los diagramas del lugar geométrico de las raíces para las dos situaciones: diagrama a) con el control proporcional y b) con el control integral.
Figura 85 Ejemplo 41

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
128
Control proporcional integral La reducción en la estabilidad relativa como resultado de usar el control integral se puede resolver, como una extensión, mediante el control proporcional integral (PI, figura 86). Para tal combinación la salida del controlador es
Figura 86 Control proporcional Integral
Figura 87 Control proporcional integral
La figura 87 ilustra el tipo de salida del controlador que se presenta con dicho sistema cuando existe una entrada de error tipo escalón. Al tomar la transformada de Laplace de la ecuación [8] se obtiene una función de transferencia para el controlador PI de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
129
(Kp/Ki) se denomina constante de tiempo integral, ti. De esta manera.
En consecuencia, la función de transferencia de la trayectoria directa para el sistema de la figura 86 es:
De esta manera, mediante el uso del control PI se adicionan un cero en -(1 /ti) y un polo en 0. El factor 1/s incrementa el tipo de sistema en 1 y elimina la posibilidad de un error en estado estable para una entrada escalón. Debido a que se introducen un nuevo polo y un nuevo cero, la diferencia entre el número de polos n y número de ceros m permanece sin cambio. Así, los ángulos de las asíntotas para los lugares geométricos de las raíces no cambian.
Sin embargo, el punto de intersección de las asíntotas con el eje real se mueve hacia el origen y, en consecuencia, se presenta cierta reducción en la estabilidad relativa
Adicionar el polo en 0 y el cero en s = -(1Iti) da por resultado que el punto de intersección cambia por (1/ti)/(n- m) a la derecha y se hace más positivo y cercano al origen. Sin embargo, la reducción en la estabilidad relativa no es tanto como lo es con el control integral solo.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
130
La posición del cero que se introduce está determinada por la ganancia integral, Ki, es decir, ésta se determina mediante la constante de tiempo integral, ti. La ganancia proporcional, Kp, determina las posiciones de los polos en lazo cerrado (vea la sección sobre control proporcional al principio del capítulo). Ejemplo 42 Si la planta de la figura 86 tiene una función de transferencia de
y se usa con control proporcional integral, ¿cuál será a) el tipo de sistema, b) los errores en estado estable cuando se usa con i) una entrada escalón, ii) una entrada rampa y c) cómo se compara la estabilidad con la que se presentaría si se tuviera i) control proporcional (como en el ejemplo 40), ii) control integral (como en el ejemplo 41)? La constante de tiempo integral es 2 s. Respuesta
a) El sistema tendrá una función de transferencia en lazo abierto según la ecuación [10] como
Por lo tanto, el sistema es de tipo 2. b) i) El error en estado estable, ess, con una entrada escalón es cero para un sistema de tipo 2 (vea el ejemplo 41 de esta lección). ii) Para una entrada rampa un sistema de tipo 2 da un error en estado estable cero. El sistema es, de esta manera, mejor que al que sólo se aplica control proporcional e igual que al que sólo se aplica control integral. c) Para la situación del control proporcional integral el sistema tiene una función de transferencia de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
131
La ecuación característica es, entonces
El arreglo de Routh es
Figura 88 Ejemplo 42
En la primera columna todos los elementos son positivos si 0.5Kp es mayor que 0. La adición del control proporcional al control integral resulta en una restitución de la estabilidad. La figura 88 ilustra el diagrama del lugar geométrico de las raíces para el

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
132
sistema. Éste se debería comparar con el diagrama del lugar geométrico de las raíces de la figura 85 cuando los controles proporcional e integral están separados. Al compararlo sólo con el control proporcional, la estabilidad relativa se reduce y con el control PI, las asíntotas están más cercanas al eje imaginario, pero comparado sólo con el control integral el control PI ha empujado los lugares geométricos de las raíces hacia la izquierda en el plano s.
Control derivativo
Figura 89 Control derivativo
Figura 90 Control derivativo
Con la forma derivativa del controlador, la salida del controlador es proporcional a la razón de cambio con el tiempo del error e, es decir
donde Kd es la ganancia derivativa y tiene unidades de s. La figura 89 muestra qué pasa cuando hay un error de entrada rampa. Con el control derivativo, tan pronto como la señal de error inicia puede haber una salida del controlador muy grande, puesto que ésta es proporcional a la razón de cambio de la señal de error y no a su valor. De este modo puede proporcionar una acción correctiva grande antes de que

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
133
se presente un error grande en realidad. Sin embargo, si el error es constante, entonces no hay acción correctiva, aun si el error es grande. Así, el control derivativo es insensible a señales de errores constantes o que varían con lentitud y, en consecuencia, no se usa solo, sino combinado con otras formas de controlador. Al tomar la transformada de Laplace de la ecuación [11] resulta, para el control derivativo, una función de transferencia salida (s)/e(s)
Por lo tanto, para el sistema en lazo cerrado que muestra la figura 90, la presencia del control derivativo produce una función de transferencia de
Si la planta es de tipo 1 o mayor, entonces la aplicación de la acción derivativa es para cancelar una s en el denominador y así reducir el orden en 1. No obstante, como antes se mencionó, la acción derivativa no se usa sola sino sólo en conjunto con otra forma de controlador. Cuando se usa esta acción de control se logra que la respuesta sea más rápida.
Existen dificultades en la implantación de una ley de control derivativa, por lo que en la práctica se obtiene una aproximación mediante el uso de un compensador de adelanto (vea más adelante en este capítulo). Éste tiene una función de transferencia de la forma
Control proporcional derivativo
Si el control derivativo se usa con el control proporcional (figura 91), entonces la función de transferencia en lazo abierto se convierte en
donde td = Kd/Kp y se denomina constante de tiempo derivativa. Con esta forma de control se ha introducido un cero en s = -1/td. Tampoco habrá cambios en el tipo de sistema y, por lo tanto, en los errores en estado estable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
134
Figura 91 Control proporcional derivativo
Ejemplo 43 Si la planta del sistema de la figura 91 tiene una función de transferencia de
y se usa con el control proporcional derivativo, ¿cuál será a) el tipo de sistema, b) los errores en estado estable cuando se usa con i) una entrada escalón, ii) una entrada rampa y c) cuál es la condición para la estabilidad? La constante de tiempo derivativa es de 2 s. Respuesta a) El sistema tendrá una función de transferencia en lazo abierto dada por la ecuación [14] como
Por lo tanto, el sistema es de tipo 1. b) i) El error en estado estable, ess es cero para una entrada escalón con un sistema de tipo 1. ii) Para una entrada rampa, θi(s) es 1Is2 y el error en estado estable es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
135
Puesto que (1Itd ) = 0.5 = Kp/Kd entonces
c) Para la situación del control proporcional derivativo el sistema tiene una función de transferencia de
La ecuación característica es entonces
El arreglo de Routh para este sistema es
En la primera columna todos los términos son positivos y el sistema es estable si Kd es positiva. La figura 92 muestra el diagrama del lugar geométrico de las raíces para el sistema.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
136
Figura 92 Ejemplo 43
Lección 2: CONTROL PID El controlador proporcional integral derivativo (PID), mejor conocido como controlador de tres términos, con un sistema de la forma que ilustra la figura 93 dará una salida, para una entrada de error e, de
La función de transferencia, salida (s)/e(s), del controlador es, de esta manera
Figura 93 Control PID

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
137
Debido a que la constante de tiempo integral, ti, es Kp/Ki y la constante de tiempo derivativa, td es Kd /Kp la ecuación [15] se puede escribir como
La función de transferencia en lazo abierto para el sistema de la figura 93 es
De este modo, el controlador PID ha incrementado el número de ceros en 2 y el número de polos en 1. También el factor 1Is incrementa el tipo de sistema en 1. En la ecuación anterior se supone que se ha empleado un diferenciador ideal. En la práctica, como se indicó antes en este capítulo, se usa un compensador de adelanto. Ejemplo 44 Sí la planta en el sistema de la figura 93 tiene una función de transferencia de
y se usa control PID, ¿cuál será a) el tipo de sistema, b) los errores en estado estable cuando se usa con i) una entrada escalón, ü) una entrada rampa, c) las posiciones de los polos y ceros en lazo abierto y d) la condición para la estabilidad? La constante de tiempo derivativa es de 0.5 s y la constante de tiempo integral, de 2 s. Respuesta
a) El sistema tendrá una función de transferencia en lazo abierto dada por la ecuación [18] como

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
138
De esta manera el sistema es de tipo 2. b) i) El error en estado estable ess es cero para una entrada escalón con un sistema de tipo 2. Véase el ejemplo 41 en este capítulo. ii) El error en estado estable ess es cero para una entrada rampa con un sistema de tipo 2. Véase el ejemplo 41 en este capítulo. c) La función de transferencia en lazo abierto del inciso a indica que el sistema tiene un cero de -1 en lazo abierto y polos de 0 y 0. Uno de los polos originales ha sido cancelado por un cero introducido por el controlador. d) Para la situación del control PID, el sistema tiene una función de transferencia de
De este modo, la ecuación característica es
El arreglo de Routh para este sistema es
Todos los términos de la primera columna son positivos y el sistema es estable si K es positiva. La figura 2.2 ilustra el diagrama del lugar geométrico de las raíces para el sistema.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
139
Figura 94 Ejemplo 44
Lección 3: REGLAS DE SINTONÍA DE CONTROLADORES PID. El uso del control proporcional sólo requiere la elección de una variable: la ganancia proporcional, Kp, para que el sistema de control tenga el comportamiento dinámico requerido. El uso de un controlador PI requiere la selección de dos variables: la ganancia proporcional Kp y la ganancia integral, K¡. Con un controlador PID se deben seleccionar tres variables: la ganancia proporcional, Kp, la ganancia integral, Ki, y la ganancia derivativa, Kd. La selección de estas variables permite localizar los polos y ceros que introduce el controlador a ser determinados y, por lo tanto, afectan la estabilidad del sistema de control.
Figura 95 Curva de reacción de proceso
Para describir el proceso de selección de los mejores valores para el controlador se usa el término sintonización. Existen varios métodos para lograrlo, pero aquí sólo se estudiarán dos métodos, los de Ziegler y Nichols. Ambos métodos se basan en experimentación y análisis, éstos son recetas de cocina útiles que se usan con

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
140
mucha frecuencia. El primer método a menudo se denomina método de la curva de reacción del proceso. El procedimiento con este método consiste en abrir el lazo de control de modo que no se presenten acciones de control. En general, la ruptura del lazo se hace entre el controlador y la unidad de corrección. Se aplica, entonces, una señal de prueba a la unidad de corrección y se determina la respuesta de la variable de proceso medida, es decir, la señal de error. La señal de prueba deberá ser tan pequeña como sea posible. La figura 95 muestra la forma de la señal de prueba y una respuesta típica. La gráfica de la señal medida se gráfica contra el tiempo y se conoce como la curva de reacción del proceso. En pocas palabras, la prueba consiste en aplicar una señal escalón a la planta en lazo abierto. La señal de prueba, P, se expresa como el porcentaje de cambio en la unidad de corrección. La variable medida se expresa como el porcentaje del rango a escala completa. Para dar el máximo gradiente de la gráfica se traza una tangente. Para la figura 95 el máximo gradiente R es M/T. El tiempo entre la aplicación de la señal de prueba y cuando esta tangente intersecta el eje de tiempo de la gráfica se denomina atraso L. La tabla siguiente proporciona los criterios recomendados por Ziegler y Nichols para los valores del controlador con base en los valores de P, R y L. Tabla 2 Criterios de Ziegler y Nichols para la curva de reacción del proceso
El otro método se conoce como el método de la última ganancia. Primero, las acciones integral y derivativa se reducen a sus valores mínimos. La constante proporcional, Kp, se fija en un valor bajo y entonces, se incrementa en forma gradual. Esto es lo mismo que decir que la banda proporcional se hace más angosta de manera gradual. Mientras esto sucede, al sistema se le aplican pequeñas pertur-baciones. El proceso continúa hasta que se presentan oscilaciones. Se anota el valor crítico de la constante proporcional, Kpc, en la que se presentan las oscilaciones, así como el tiempo (período) Tc, de éstas. La tabla 3 muestra los criterios de Ziegler y Nichols sobre cómo se relacionan los valores de kPC y Tc para establecer los valores del controlador. La banda proporcional crítica es 100/Kpc . Tabla 3 Criterios de Ziegler y Nichols para la última ganancia

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
141
Ejemplo 45 Determinar los valores que deben tener KP, Ki y Kd requeridos para un controlador de tres modos, a partir de la curva de reacción del proceso de la figura 96 cuando la señal de prueba fue un 6% de cambio en la posición de la válvula de control.
Figura 96 Respuesta Se dibuja una tangente en la parte de máximo gradiente de la gráfica que da un atraso, L, de 150 s y un gradiente, R, de 5/300 = 0.017 %/s. Por lo tanto
Ejemplo 46 Cuando se sintonizó un controlador de tres modos en un sistema de control, mediante el método de la última ganancia, se encontró que las oscilaciones iniciaban cuando la banda proporcional decrecía hasta un 30%. Las oscilaciones tienen un periodo de 500 s. ¿Cuáles son los valores apropiados de Kp , Ki y Kd ? Respuesta El valor crítico de Kpc es 100/banda proporcional crítica y, así, 100/30 = 3.33. De esta manera, con base en los criterios de la tabla 3:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
142
Realimentación de velocidad En muchos sistemas se involucra el posicionamiento de algún objeto, por ejemplo, el brazo de un robot; en este caso, el requerimiento es que el sistema responda con rapidez a los errores y no producir excesivas oscilaciones, o sobrepasos. Esto se puede lograr incorporando dentro del lazo principal de realimentación una trayectoria de realimentación menor que introduzca lo que se denomina realimentación de velocidad, término que describe un lazo de realimentación donde la señal que se alimenta de regreso no es el valor de la salida sino la razón de cambio con el tiempo de la salida. Para esta realimentación la salida de la trayectoria de realimentación se relaciona con su entrada mediante
y, de esta manera, la trayectoria de realimentación tiene una función de transferencia de
Kv es una constante, la ganancia de realimentación, con unidades de s.
Figura 97 Sistema con realimentación de velocidad y posición
El término de realimentación de posición se usa en circunstancias en las que se realimenta el valor de la salida. Estos términos surgen a partir del uso primario de sistemas de control para controlar la posición de algún objeto; la realimentación de posición es, entonces, una medida de la posición del objeto y la realimentación de velocidad, una medida de la velocidad del objeto. La figura 97 muestra un sistema

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
143
con ambas formas de realimentación. En estos sistemas la función de transferencia en lazo abierto es
y la función de transferencia en lazo cerrado es
El efecto de la realimentación de velocidad ha sido el introducir un término Gp (s)Kvs en el denominador y, de este modo, en la ecuación característica. El efecto de esto se puede ver al considerar un ejemplo. Considere un sistema con control proporcional, ganancia Kp, y una planta con una función de transferencia 1/s(s + a). La función de transferencia en lazo abierto es
La realimentación de velocidad modifica el denominador y, por lo tanto, la posición de las raíces en lazo abierto. Las raíces, las cuales estaban en 0 y en a en ausencia de la realimentación de velocidad, están ahora en 0 y -(a + Kv). La figura 98 ilustra el efecto sobre el diagrama del lugar geométrico de las raíces. Como consecuencia de la realimentación de velocidad se mejoró la estabilidad relativa, se incrementó el factor de amortiguamiento relativo para la misma frecuencia natural angular y la frecuencia natural angular se incrementó para el mismo factor de amortiguamiento relativo. El sobrepaso en porcentaje es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
144
Figura 98 El efecto de la realimentación de velocidad: a) sin , b) con realimentación de velocidad
Debido a que ζ = cos Ө, entonces
Así el sobrepaso en porcentaje es
El efecto de incluir la realimentación de velocidad es reducir Ө para un valor particular de la frecuencia natural angular. Esto significa una reducción en la tan Ө y, en consecuencia, un decremento en el sobrepaso en porcentaje.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
145
Ejemplo 47 Un sistema en lazo cerrado tiene un controlador proporcional de ganancia Kp, una planta de función de transferencia
y una realimentación de posición unitaria: a) ¿Qué ganancia proporcional se requiere para que la frecuencia natural angular sea de 2 rad/s? (b) ¿Cuál es el factor de amortiguamiento relativo en esa frecuencia? c) Si se introdujera la realimentación de velocidad como en la figura 97, ¿cuál sería la ganancia de velocidad necesaria para que el factor de amortiguamiento relativo se duplique para la misma frecuencia angular? Respuesta El diagrama del lugar geométrico de las raíces sin la realimentación de velocidad y con ésta se muestra en la figura 98.
a) La función de transferencia en lazo abierto para el sistema es
Las raíces en lazo abierto están en 0 y -1. La función de transferencia en lazo cerrado es
Esta tiene la ecuación característica
Las raíces de esta ecuación son

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
146
Figura 99 Ejemplo 47
Por lo tanto, la frecuencia natural angular, ωn, es (figura 99)
Así, para ωn = 2 rad/s, entonces Kp = 4.0. b) El factor de amortiguamiento relativo, , es cos Ө y, por lo tanto según la figura 99:
c) Con la realimentación de velocidad la función de transferencia en lazo abierto se convierte, como antes se indicó mediante la ecuación [23], en
De esta manera, los polos en lazo abierto se convierten en 0 y -(1 +KV). El diagrama del lugar geométrico de las raíces, entonces, se convierte como muestra la figura 100.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
147
Figura 100 Ejemplo 47 Entonces
Puesto que ωn permanece sin cambio en 2 rad/s y es el doble de 0.25, entonces
y así, Kv =1.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
148
Lección 4: COMPENSACION Los compensadores se pueden definir como componentes insertos en el sistema de control para aumentar el desempeño del controlador. Si se considera que el controlador va a tener como base un controlador proporcional, entonces, como ejemplo, se puede considerar que un controlador PI va a ser un controlador proporcional con un compensador integral. Cuando el compensador se incluye en la trayectoria directa del lazo de control se dice entonces que éste va a ser un compensador en cascada. De esta manera, el compensador integral es el compensador integral en cascada. El efecto de incluir un compensador se trató al inicio en este capítulo, lo que tendrá principalmente una mejora respecto a los errores en estado estable y una reducción en la estabilidad. Los compensadores se usan para mejorar el desempeño y para moldear el lugar geométrico de las raíces. Así, el compensador integral introduce un polo en el origen y, de este modo, cambia la posición y forma de los lugares geométricos de las raíces. Las dos formas más comunes de compensadores en cascada tienen la función de transferencia
Cuando z > p se conoce como compensador de atraso en cascada, cuando z< p, como compensador de adelanto en cascada. De esta manera, ambos compensadores introducen un cero y un polo; sin embargo, entre los dos difiere la posición relativa del polo y el cero. Un compensador de atraso en cascada introduce el polo en lazo abierto más cercano al origen que el cero. En muchos aspectos éste es como un control proporcional integral; sin embargo, la principal diferencia es que el polo que se introduce no está en el origen. Del mismo modo que con el control PI, el punto de intersección de las asíntotas sobre el eje real se mueve a la derecha y así existe alguna reducción en la estabilidad. Los ángulos de las asíntotas permanecen sin alteración, puesto que no hay cambio en (n - m). Sin embargo, puesto que no hay un factor 1Is no hay cambio en el tipo de sistema. Un compensador de adelanto en cascada introduce el cero más cercano al origen que el polo. En muchos aspectos éste es como un control proporcional derivativo, pero la principal diferencia es que el cero no se introduce en el origen. Como con el control PD, el punto de intersección de las asíntotas sobre el eje real se mueve a la izquierda y, así, existe una mejora en la estabilidad. Los ángulos de las asíntotas permanecen sin alteración, puesto que no hay cambio en (n - m). No se introduce un factor 1/s y, de esta manera, no hay cambio en el tipo de sistema. Ejemplo 48 Mostrar el efecto sobre el diagrama del lugar geométrico de las raíces de un sistema con una función de transferencia en lazo abierto de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
149
Al introducir en la trayectoria directa un compensador de adelanto con una función de transferencia de
Y explicar el efecto sobre la estabilidad relativa. Respuesta El sistema sin compensar tiene polos en lazo abierto en 0 y -1 y no tiene ceros. Las asíntotas están a ángulos de π/2 e intersectan el eje real en -1 / 2, debido a que n - m = 2. El lugar geométrico sigue el eje real entre las dos raíces. Los lugares geométricos se desprenden del eje real en -0.5. En consecuencia, el diagrama del lugar geométrico de las raíces es como se describe en la figura 101a. El sistema compensado tiene una función de transferencia en lazo abierto de
De esta manera hay polos en lazo abierto en 0, -1 y -8 con un cero en -2. Las asíntotas están en ángulos de π/2 e intersectan el eje real en -7 / 2, puesto que n - m = 2. Los lugares geométricos siguen al eje real entre 0 y-1, y entre-2 y-8. El punto de desprendimiento del eje real está aún alrededor de - 0.5. De esta manera, el diagrama del lugar geométrico de las raíces es como se ilustra en la figura 101b.
Figura 101 Ejemplo 48

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
150
Puesto que la intersección de las asíntotas con el eje real se ha movido de -0.5 hasta -3.5 existe una mejora en la estabilidad relativa. Lección 5: IMPLEMENTACION DE LAS LEYES DE CONTROL.
Figura 102 Amplificador operacional en configuración inversora
En sistemas de control eléctricos con frecuencia se usan amplificadores operacionales como la base para generar las leyes de control requeridas. La figura 102 muestra la forma básica de dicho amplificador cuando éste se conecta como si fuera a usarse como un amplificador inversor. El amplificador tiene dos entradas, conocidas como la entrada inversora (-) y la entrada no inversora (+). Para usarse como amplificador inversor, la entrada se conecta a través de un resistor, R1, a la entrada inversora del amplificador y la entrada no inversora se conecta a tierra. Una trayectoria de realimentación está provista por el resistor R2. El amplificador operacional tiene una ganancia grande en lazo abierto, del orden de 100 000 o más, y el cambio en su voltaje de salida está limitado, en general, en alrededor de ±10 V. Para producir esa salida con esta ganancia, el voltaje de entrada debe estar entre 0.00001 V y -0.00001 V. Éste es virtualmente cero y, así, el punto X está virtualmente a un potencial de tierra. Por esta razón a ese punto se le llama tierra virtual. La diferencia de potencial a través de R1 es V1 -Vx, por lo tanto, el potencial de entrada, V1 se puede considerar como el voltaje a través de R1 y, de esta manera
El amplificador operacional tiene una impedancia de entrada muy alta y de esta manera virtualmente no fluye corriente hacia su interior a través del punto X. Por lo tanto, la corriente, I1 fluye sólo a través de R2. Puesto que X es la tierra virtual, y debido a que la diferencia de potencial a través de R2 es Vx -V0, entonces la diferencia de potencial a través de R2 será virtualmente -V0. Por lo que

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
151
Así, la función de transferencia está determinada por los valores relativos de R2 y R1. El signo negativo indica que la salida está invertida, es decir, desfasada 180° respecto a la entrada. Como indica la ecuación [26], el amplificador operacional inversor tiene una ganancia de -R2/R1. El signo menos se puede eliminar pasando la salida a través de otro amplificador operacional inversor.
Figura 103 Controlador proporcional
pero esta vez uno en el que R2 = R1 y así tenga una ganancia de —1. La combinación (figura 103) es, entonces, un controlador proporcional con
Se puede producir un controlador integral si el resistor de realimentación se reemplaza por un capacitor (figura 104). Para un capacitor se tiene que:
Figura 104 Controlador integral

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
152
De este modo
y así, la impedancia Z, está dada por
Para el circuito con amplificador operacional con el capacitor en la realimentación, la ecuación básica [26] se puede escribir como
Puesto que entonces
Cuando el circuito se combina con otro circuito con amplificador operacional de función de transferencia -1, como muestra la figura 104, da por resultado
y, por lo tanto, es un controlador integral con Ki = (1/R1C). La figura 105 describe cómo se puede adaptar el circuito para dar un controlador PI. Para este circuito
Figura 105 Controlador PI

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
153
Y, de esta manera
La figura 106 muestra cómo se puede producir un controlador derivativo. Para el amplificador operacional con capacitor y resistor en la línea de entrada se tiene, según la ecuación [29], Z2 = R2 y
Figura 106 Controlador derivativo
De este modo, la ecuación [29] da por resultado
Al combinar este circuito con uno que tenga una función de transferencia de -1 da como resultado
Así, el circuito tiene una ganancia derivativa, Kd de R2C. La figura 107 muestra cómo se puede modificar el circuito para obtener un controlador PD. La figura 108 ilustra cómo se pueden combinar los circuitos con amplificadores operacionales del controlador PI y el controlador D para producir un controlador PID. La función de transferencia es, entonces

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
154
. Figura 107 Controlador PD
Figura 108 Controlador PID
La forma neumática de los controladores proporcional, integral y derivativo se usa en diversos sistemas de control de procesos. La figura 109 muestra la forma básica de un controlador proporcional neumático. Cuando la presión del proceso iguala la presión del punto de ajuste, el arreglo tobera-aleta produce la salida correspondiente a un error cero. Cuando la presión del proceso cambia de este valor, la aleta gira y cambia el espacio entre la aleta y la tobera. El resultado es un cambio en la presión de salida. Esta presión cambia hasta que los fuelles de realimentación ejercen una fuerza para balancear a aquélla debida a los fuelles del proceso. La fuerza debida a la diferencia de presión entre el punto de ajuste y los fuelles del proceso es (Pp - Ps)A1, donde Pp es la presión del proceso y Ps es la presión del punto de ajuste. A1 es el área efectiva de los fuelles, se supone que para ambos es la misma área. El momento de rotación alrededor del pivote de esta fuerza es (Pp -Ps)A1d1, donde d1 es la distancia del punto de aplicación de esta fuerza a partir del punto de pivote.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
155
Figura 109 Controlador proporcional neumático
La fuerza debida a los fuelles de realimentación cambia de la que se presenta cuando las presiones del punto de ajuste y la del proceso fueran iguales a (Psal - P0)A2, donde Psal es la presión de salida y P0, el valor que tenía la presión de salida cuando no había error. A2 es el área efectiva de los fuelles de realimentación. El momento de rotación alrededor del pivote de esta fuerza es (Psal - P0)A2d2, donde d2 es la distancia de su punto de aplicación a partir del punto del pivote. El equilibrio se presenta y la aleta se detiene cuando
Y asi
donde K es la constante de proporcionalidad igual a A1d1 / A2d2.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
156
Capitulo 5: ANALISIS DE SISTEMAS DE CONTROL MEDIANT E LA RESPUESTA EN FRECUENCIA.
Introducción Aunque hasta el momento se ha utilizado el término "controlador" para definir al conjunto de acciones que se utilizan para actuar sobre el proceso; el término más empleado en la bibliografía existente es el de "compensador", de manera que es frecuente referirse al control PI como compensador PI, y al control PID como compensador PID, etc. El diseño de los parámetros de los controladores que se han desarrollado hasta el momento se ha basado en técnicas temporales, efectuando las especificaciones del diseño a nivel temporal, mediante el máximo sobreimpulso, el tiempo de establecimiento, etc. Estas especificaciones se han trasladado al plano de Laplace, posibilitando el uso de las herramientas y técnicas de diseño disponibles en este plano. No obstante, en el diseño realizado se ha tenido pleno conocimiento de las características de la planta o proceso que se pretende controlar, pues sin este conocimiento el diseñador no tiene ningún indicativo de la forma de llevar a cabo el control adecuado del sistema, lo cual se extiende a aquellos sistemas de los que se desconoce la función de transferencia o en los que ésta es difícil de caracterizar. Para estos sistemas, una alternativa de diseño consiste, en primer lugar, en obtener información de la planta o proceso mediante su respuesta frecuencial, que es posible obtener de una manera experimental. Posteriormente, se puede realizar el diseño del controlador mediante técnicas de diseño basadas en la respuesta frecuencia del sistema que hay que controlar.1
1 Segmento introductorio tomado de http://www.edicionsupc.es/ftppublic/pdfmostra/EE00305M.pdf

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
157
Lección 1: RESPUESTA EN FRECUENCIA.
Si a un sistema lineal se aplica una entrada senoidal, la salida es también una senoidal y de la misma frecuencia. La salida puede diferir de la entrada en amplitud y en fase. El cociente de la amplitud de la salida entre la amplitud de la entrada en general se conoce como magnitud aunque algunas veces se denomina razón de amplitud o ganancia. El corrimiento de fase de la senoidal de salida en relación con aquel de la senoidal de entrada se denomina fase. La variación de la magnitud y la fase con la frecuencia se denomina respuesta en frecuencia del sistema.
Función de transferencia
La función de transferencia G(s) de un sistema en general se puede representar mediante
[1]
Donde K es la ganancia; z1, z2,... zm, los ceros del sistema, y p1, p2 ... pn, los polos, habiendo m ceros y n polos. De este modo, puesto que G(s) es el cociente de la salida entre la entrada, es decir, G(s) = Ө0 (s)/Өi (s), entonces la salida está dada por
De esta manera, si se considera una entrada senoidal
donde a es la amplitud de la entrada y ω la frecuencia angular en rad/s, entonces
y la ecuación [2] se convierte en

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
158
Esta ecuación se puede solucionar usando fracciones parciales y obtener una relación de la forma
Ө0(s) = términos transitorios + términos en estado estable
Los términos transitorios desaparecen con el tiempo. De esta manera, si sólo se tiene interés en el estado estable, la solución que se obtiene es
La salida en estado estable es senoidal con la misma frecuencia angular ω que la entrada. |G(Jω)| es la magnitud de la función de transferencia G(s) cuando s se reemplaza por jω. La función G(jω), la cual se obtiene al reemplazar s por jω en G(s), se denomina función de respuesta en frecuencia. De la misma manera que se habló de G(s) en el dominio de s, se puede hablar de G(jω) siendo la función de transferencia G(s) en el dominio de la frecuencia. G(jw) se puede encontrar al reemplazar todos los valores de s en G(s) por jω y, así, reordenar la expresión para obtenerla en la forma que permite separar las partes real e imaginaria y, por lo tanto, identificar la magnitud y la fase. Considere la función de transferencia
Si se hace s = jω entonces
Si el numerador y el denominador de la expresión anterior se multiplican por (-jω + 2), entonces
Esta ecuación proporciona la función de transferencia en frecuencia como un número complejo en la forma x + jy. Por lo tanto, la magnitud, | G(jw) | (vea la nota al final de esta sección), es:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
159
Y la fase Ө está dada por
Puesto que el término y es negativo y el término x, positivo, entonces la tan θ es negativa y, de este modo, Ө es el ángulo mediante el cual la salida se atrasa respecto a la entrada. Lo que se presenta a continuación es un breve recordatorio acerca de los números complejos. Una cantidad compleja se puede representar mediante (x + jy), donde x es la parte real y y, la parte imaginaria del número complejo. En una gráfica con la parte imaginaria como el eje y y la parte real como el eje x, la x y la y son las coordenadas cartesianas del punto que representa al número complejo (figura 110). Otra manera de representarlo es en forma polar como r(cos Ө + jsen Ө), donde, sobre la gráfica de la componente imaginaria contra la componente real, r es la longitud de la línea que une el origen con el punto que representa el número complejo y θ es el ángulo entre la línea y el eje x. El término (cos Ө + jsen Ө) se puede representar mediante <Ө y, de esta manera, el número complejo mediante r <Ө, donde r es la magnitud y Ө, la fase del número complejo. Por lo tanto, con el teorema de Pitágoras la magnitud está dada por
Y la fase Ө, mediante
Los signos de los términos x y y se deben tener en cuenta al determinar la tan Ө. Si las componentes y y x son positivas significaría que Ө está entre 0 y 90°; con y

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
160
positiva y x negativa, Ө estaría entre 90° y 180°; con y negativa y x negativa, Ө estaría entre 180° y 270°, y con y negativa y x positiva, Ө estaría entre 270° y 360°.
Figura 110 Un número complejo
Ejemplo 49 ¿Cuáles son la magnitud y fase de salida en estado estable de un sistema que está sujeto a una entrada senoidal de Өi =2sen(3t +60°), si éste tiene una función de transferencia de
Respuesta Al reemplazar s por jω se obtiene

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
161
Al multiplicar numerador y denominador de la ecuación por (-jω +1) se obtiene
Por lo tanto
Y el ángulo de fase esta dado por
y, dado que y es negativa y x positiva, θ es el ángulo mediante el cual la salida se atrasa respecto a la entrada. Para una entrada específica ω=3 rad/s, en consecuencia
Y
De esta manera, Ө = -72°. La salida, es de este modo
Donde a es la amplitud de la entrada, 2 en este caso; ω es la frecuencia angular de 3 rad/s; θ, el ángulo de fase de la entrada, y Φ, la diferencia de los ángulos de fase entre la salida y la entrada. Por lo tanto

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
162
Ejemplo 50 Para un sistema que tiene una función de transferencia
determinar a) la magnitud y fase de la respuesta en frecuencia y b) hacer una tabla que muestre los valores de la magnitud y la fase con la frecuencia angular para ω = 0,2,10,100, ∞, rad/s.
Respuesta
a) Al reemplazar s por jω se obtiene
Al multiplicar el numerador y el denominador de la ecuación por (-jw + 2) se obtiene
La ecuación está ahora en la forma x + jy. Por lo tanto, según la ecuación [5]
El ángulo de fase está dado por la ecuación [6] como
y, debido a que y es negativa y x positiva, éste es el ángulo de fase mediante el cual la salida se atrasa respecto a la entrada.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
163
Respuesta en frecuencia de un sistema de primer ord en
Un sistema de primer orden tiene una función de transferencia de la forma
donde t es la constante de tiempo. La función de respuesta en frecuencia, G(jω), se puede obtener reemplazando s por jω. Por lo tanto
Al multiplicar el numerador y el denominador de la ecuación por (1 - jωt) se obtiene
La ecuación es ahora de la forma (x + jy) y la magnitud | G(jω) | es, mediante la ecuación [5]

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
164
La fase, Ө, está dada por la ecuación [6] como
El ángulo de fase es la cantidad por la cual la salida se atrasa respecto a la entrada dado que el término y es negativo y el x, positivo. Ejemplo 51 La función de transferencia para un sistema (un circuito eléctrico con un resistor en serie y un capacitor a través del cual se toma la salida) es
¿Cuál es: a) la función de respuesta en frecuencia, G(jω), y b) la magnitud y la fase de esa respuesta? Respuesta
a) El sistema es de primer orden con una constante de tiempo t, de RC. De esta manera, la función de respuesta en frecuencia será de la forma dada por la ecuación [8], es decir, la función de transferencia donde jω reemplaza a s.
b) La magnitud es, así, de la forma dada por la ecuación [9]

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
165
La fase Ө, está dada por la ecuación [10] como
Respuesta en frecuencia para un sistema de segundo orden
Un sistema de segundo orden tiene una función de transferencia de la forma
donde ωn es la frecuencia angular natural y ζ, el factor de amortiguamiento relativo. La respuesta en frecuencia se obtiene al reemplazar s por jω. De este modo, la función de respuesta en frecuencia, G(jω), está dada por
Al multiplicar el numerador y el denominador de la ecuación por
Se obtiene
La ecuación es ahora de la forma x + jy y, así, la magnitud, |G(jω| está dada por la ecuación [5] como

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
166
La fase Ө, está dada por la ecuación [6] como
El signo menos indica que la salida está atrasada respecto a la entrada.
Respuesta en frecuencia a partir del patrón de polo s y ceros
Figura 111 G(jω)
La magnitud y la fase de G(jω) se pueden encontrar a partir del patrón de polos y ceros para un sistema. Suponga que se tiene un sistema con una función de transferencia
Este sistema tiene un polo en s = -1 (figura 111). Si la entrada al sistema es una senoidal, entonces s = jω. Esto define un punto sobre el eje jω de acuerdo con el valor de la frecuencia angular de entrada. En la figura 111 se ha elegido que ω tenga el valor de 1 rad/s. La función de transferencia, entonces, se convierte en

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
167
Pero es la longitud de la línea que corre del polo al punto s = jω y 45° es el ángulo que forma la línea con el eje real. De esta manera G(jω) es su recíproco, es
decir, En general, para una función de transferencia con varios ceros y polos, es decir,
Entonces el procedimiento es: 1 Graficar las posiciones de cada polo y cada cero. 2 Marcar la posición s = jω. 3 Dibujar líneas de cada polo y cada cero al punto s = jω. 4 Medir las longitudes y los ángulos de cada línea. 5 La función de respuesta en frecuencia es, entonces
Fase = suma de los ángulos de las líneas de los ceros - suma de los ángulos de las líneas de los polos [15] Ejemplo 52 Un sistema tiene una función de transferencia
Determinar la salida del sistema cuando se le aplica una entrada de 10 sen 2t. Respuesta La función de transferencia se puede escribir como

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
168
La figura 112 describe el patrón de polos y ceros; los ceros están en s = 0 y s = -2 y los polos en s= -1+j1 y s = -1 - j1. La entrada tiene una frecuencia angular de 2 y, de esta manera, jω es +2. Las líneas se dibujan desde este punto a cada uno de los polos y los ceros. Los ceros dan líneas con magnitud 2, ángulo de 90° y magnitud √8, ángulo de 45°; los polos dan magnitud √2, ángulo de 45° y magnitud √10, ángulo de 71.6°. De esta manera
Así, dado que G(jω) = salida/entrada para una señal senoidal, entonces, puesto que la entrada es 10 <0°
Figura 112 Ejemplo 52

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
169
Respuesta en frecuencia para elementos en serie
Figura 113 Elementos en serie
Si un sistema consta de varios elementos en serie, como en la figura 113, entonces la función de transferencia, G(s), del sistema es el producto de las funciones de transferencia de los elementos en serie, es decir,
Por lo tanto, para la función de respuesta en frecuencia cuando s se reemplaza por jω
Puesto que G1 (jω) se puede representar mediante una ecuación como
y de manera similar para las otras funciones, entonces
De esta manera
y para las fases

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
170
Ejemplo 53 ¿Cuál es la magnitud y la fase de la función de respuesta en frecuencia de un sistema con la siguiente función de transferencia?
Respuesta Se puede considerar que el sistema consta de dos elementos en serie, uno con una función de transferencia de 1/(s + 1) y el otro con 1/(2s +1). Cada sistema es de primer orden y, de esta manera, el resultado obtenido para los sistemas se puede usar para cada elemento por separado, o la respuesta en frecuencia de cada uno de los sistemas que se obtiene de los primeros principios. Para la función
Por lo tanto
Y
Para el segundo sistema

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
171
Por lo tanto
Y así
Y
De este modo, para los dos elementos en serie, la ecuación [16] da por resultado
y la ecuación [17]
Lección 2: TRAZAS DE BODE.
Las Trazas de Bode consisten en dos gráficas: una de la magnitud graneada contra la frecuencia y una del ángulo de fase graneada contra la frecuencia. La magnitud y la frecuencia se grafican usando escalas logarítmicas.
Para un sistema que tiene una función de transferencia que involucra varios términos, la ecuación [16] indica que la magnitud resultante es el producto de las magnitudes de los elementos que la constituyen, es decir,
Al tomar logaritmos base 10, la ecuación se convierte en

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
172
De esta manera, el trazar una gráfica de log | G(jω) | contra la frecuencia significa que sólo se pueden sumar las contribuciones debidas a los términos de magnitud individuales. Por ejemplo, si se quisiera obtener la traza de Bode para
entonces se pueden graficar por separado las gráficas logarítmicas para las magnitudes de los elementos 5, (1 + jω) y 1 /(2 + jω) y sólo sumarlas para obtener la traza para | G(jω) I.
Es común expresar la magnitud en unidades de decibeles (dB).
Así, si |G(jω)| = 1 entonces, debido a que 20 log(1) es 20, la magnitud es 20 dB. Cuando existen varios elementos, la traza de fase es sólo la suma de las fases de los elementos por separado (ecuación [19]). La escala de frecuencia que se usa para ambas trazas, magnitud y fase, es logarítmica. Esto permite a la gráfica cubrir un gran intervalo de frecuencias y también conduce a gráficas asintóticas mediante líneas rectas. Debido a que las trazas de Bode para un sistema se pueden formar a partir de las trazas para los elementos individuales, dentro de la función de transferencia para ese sistema, es útil considerar las trazas para los elementos que por lo común se encuentran en las funciones de transferencia. Con estos elementos se pueden formar con rapidez las trazas de Bode para una amplia variedad de sistemas. Los elementos básicos que se consideran son: Ganancia constante Esto es donde
y, de esta manera
para dicho sistema la magnitud en decibeles es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
173
y la fase es cero. Las trazas de Bode son, entonces, de la forma que ilustra la figura 114. La traza de magnitud es una línea recta de magnitud constante. Al cambiar la ganancia, K, la traza de magnitud sólo recorre hacia arriba o hacia abajo cierto número de decibeles.
Un polo en el origen Esto es donde
y, de esta manera
Para dicho sistema la magnitud en decibeles es
Cuando ω = 1 rad/s, entonces |G(jω)| = 0, y cuando ω = 10 rad/s, entonces |G(jω)| = -20 dB. Para cada década de incremento en frecuencia la magnitud cae -20 dB.
Figura 114 Trazas de Bode para una ganancia constante

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
174
La traza de Bode en magnitud es, así, una línea recta de pendiente -20 dB por década de frecuencia, la cual pasa por 0 dB en ω = 1 rad/s (figura 115). La fase de dicho sistema está dada por
Por lo tanto, la fase es constante para todas las frecuencias en -90°.
Un cero en el origen
Esto es donde
y, de esta manera
La magnitud en decibeles es, de esta manera, 20 log ω. Así, cuando ω = 1 rad/s, entonces | G(jω) | = 0 dB, y cuando ω=10 rad/s entonces I G(jω) | =20 dB. La traza de Bode en magnitud es una línea recta de pendiente +20 dB por década de frecuencia, la cual pasa por 0 dB en ω=1 rad/s (figura 116). La fase del sistema está dada por
Por lo tanto, la fase es constante en90° sin consid erar la frecuencia. Un polo real
Esto significa un sistema con un retraso de primer orden, donde
y, de esta manera

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
175
La magnitud en decibeles es
y el ángulo de fase
Cuando ω <<1 / t, ω2 t2 es despreciable respecto a 1 y, de este modo, la magnitud es 0 dB. Por lo tanto, en frecuencias bajas la traza
Figura 115 Trazas de Bode para un polo en el origen

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
176
Figura 116 Trazas de Bode para un cero en el origen
de magnitud es una línea recta constante de valor 0 dB. Para frecuencías altas, cuando ω >>1 / t, ω2 t2 es mucho mayor que 1 y, de esta manera, la magnitud se convierte en
Ésta es una línea recta de pendiente -20 dB por década de frecuencia, la cual intercepta la recta de cero decibeles cuando ω = 1, es decir, cuando ω= 1/t. La figura 117 describe estas trazas para frecuencias bajas y altas con sus intersecciones, las que se denominan punto de quiebre, frecuencia de corte o frecuencia de esquina en ω= 1\t. Las dos líneas rectas se conocen como aproximación asintótica a la traza verdadera. La traza verdadera se curvea en la intersección de las dos líneas, como muestra la figura 117. El máximo error es de 3 dB en el punto de quiebre. En la tabla 4 de esta lección se presentan las diferencias entre los valores verdaderos y los valores asintóticos.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
177
Figura 117. Trazas de Bode para un polo real
El ángulo de fase es tan-1 ωt. En frecuencias bajas, cuando ω es menor que alrededor de 0.1/t, entonces la fase es virtualmente 0o. En frecuencias altas, cuando ω es más de 10/t, entonces la fase es virtualmente -90°. Entre estos dos extremos, se puede considerar razonablemente que el ángulo de fase dé una línea recta, como en la figura 117. Esta línea es una aproximación asintótica. El máximo error
Tabla 4 Errores asintóticos para un polo real o un cero real
Nota: Valor verdadero = aproximación asintótica + error
es, suponiendo una línea recta, . En ω = 1 / t, el punto de quiebre, la fase es -45°. La tabla 4 de esta lección muestra las diferen cias entre los valores verdaderos y los valores asintóticos.
Un cero real
Esto significa un sistema de primer orden que es un adelanto, donde

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
178
y, de esta manera
La magnitud en decibeles es, de esta manera
y la fase
En frecuencias bajas, cuando ω <<1/t, entonces el término ω2t2 es insignificante en comparación con 1 y, así, la magnitud es una línea recta de 0 dB. En frecuencias altas, cuando ω >>1/t, entonces 1 es insignificante en comparación con el término ω2t2 y así la magnitud es 20 log ωt y, por lo tanto, una línea recta de pendiente 20 dB por década de frecuencia con un punto de quiebre en ω =1/t. La figura 118 muestra cómo estas dos líneas rectas se aproximan a la traza de magnitud verdadera, el máximo error sería de 3 dB en el punto de quiebre. Vea la tabla 4 de esta lección para los errores entre los valores verdaderos y las líneas asintóticas. El ángulo de fase es tan-1 ωt. En frecuencias bajas, cuando ω es menor que alrededor de 0.1/t, la fase es virtualmente 0o. En frecuencias altas, cuando ω es mayor que alrededor de 10/t, la fase es virtualmente 90°. Entre estos dos extremos en forma razonable, se puede considerar que el ángulo de fase dé una línea recta
como la de la figura 118. El máximo error, suponiendo una línea recta, es , vea

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
179
Figura 118 Trazas de Bode para un cero real
la tabla 4 de esta lección para mayores detalles. En ω = 1It, el punto de quiebre, la fase es 45°. Un par de polos complejos
Esto es donde
y de este modo
[33]
Por lo tanto se puede escribir
y, de esta manera, la magnitud en decibeles es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
180
y la fase es
De esta manera, en frecuencias bajas la traza de magnitud es una línea recta en 0 dB, mientras que en frecuencias altas es una línea recta de pendiente -40 dB por década de frecuencia. La intersección o punto de quiebre de estas dos líneas está en ω=ωn; éste es el valor de la expresión de alta frecuencia que da 0 dB y, por lo tanto, el punto de intersección con la línea de 0 dB. La traza de magnitud está, así, dada en forma aproximada por estas dos líneas asintóticas. Sin embargo, el valor verdadero depende del factor de amortiguamiento relativo, ζ. La figura 119 ilustra las dos líneas rectas y las trazas verdaderas para varios factores de amortiguamiento relativo diferentes. La tabla 5 de esta lección presenta las diferencias entre los valores verdaderos y los asintóticos para diversos factores de amortiguamiento relativo.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
181
Figura 119 Trazas de Bode para un par de polos complejos
Tabla 5 Errores asintóticos de la magnitud en dB para pares de polos o ceros complejos
Nota: Valor verdadero = aproximación asintótica + error
Para (ω/ωn)<<1, es decir, (ω/ωn ) = 0.2 o menor, entonces la fase se aproxima a
Para (ω/ωn ) >>1, es decir, (ω/ωn) = 5 o mayor, entonces la fase se aproxima a

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
182
La forma de la traza de fase depende del factor de amortiguamiento relativo; sin embargo, todas las gráficas pasan a través del ángulo de -90° en ω=ωn. Se puede dibujar una asíntota que pase por el ángulo de -90° en ω=ωn, la cual corte la línea a 0o en (ω/ωn) = 0.2 y en -180° en (ω/ωn) =5. La tabla 6 de esta lección contiene el error, o diferencia, entre los valores verdaderos y los asintóticos. Tabla 6. Errores asintóticos de la fase para pares de polos o ceros complejos
Nota: Valor verdadero = aproximación asintótica + error
Un par de ceros complejos
Esto es donde
y de este modo

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
183
Por lo tanto, la magnitud en decibeles es
y la fase es
La magnitud sólo difiere de la obtenida para los polos complejos (ecuación [34]) en que ésta es positiva mientras que para los polos complejos es negativa. De esta manera, la traza de magnitud es sólo la imagen espejo respecto a la línea de 0 dB de la traza dada en la figura 119. La fase difiere sólo de la de los polos complejos (ecua-ción [35]) en que ésta es positiva en tanto que la de los polos complejos es negativa. En consecuencia, la traza de fase es sólo la imagen espejo respecto a la línea de 0o de la traza que ilustra la figura 119.
Ejemplo 54 Dibujar los diagramas asintóticos de Bode para un sistema que tiene una función de transferencia de
Respuesta La función de transferencia consta de dos componentes: un elemento con función de transferencia 10 y otro con función de transferencia 1 /(2s +1). Las trazas de Bode se pueden dibujar para cada uno de éstos y sumarlas para dar la traza requerida.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
184
Un sistema con función de transferencia G(s) = 10 es un sistema de ganancia constante. De esta manera, la traza será como la de la figura 114 de esta lección. La magnitud es una constante, en decibeles, 20 log 10 = 20. La fase constante está en 0o; las trazas se muestran en la figura 120.
Figura 120 Ejemplo 54
Un sistema con función de transferencia G(s) =1/(2s+1) es uno con un polo real sin ceros. De este modo, el sistema es como el que ilustra la figura 117 de esta lección; la constante de tiempo es igual a 2. La traza tendrá un punto de quiebre en 1/T = 1/2 = 0.5 s y las asíntotas serán como muestra la figura 120. Al sumar las trazas da el resultado que describe la figura 120. Ejemplo 55 Dibujar la traza de Bode verdadera para un sistema con función de transferencia de
Respuesta La función de transferencia es de la forma

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
185
con wn = 10 rad/s y ζ = 0.3. Las trazas de Bode serán, así, de la forma que se describe en la figura 121.
Figura 121 Ejemplo 55
Para la traza de magnitud, el punto de quiebre es 10 rad/s, la asíntota antes de esta frecuencia tiene una pendiente de 0 y después de -40 dB por década de frecuencia. Las diferencias entre los valores verdaderos y los asintóticos se pueden encontrar con la siguiente tabla . Para ζ =0.3 las diferencias en decibeles son:
La figura 122 muestra las trazas asintótica y verdadera teniendo en cuenta estas diferencias.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
186
Figura 122 Ejemplo 55
Para la traza de fase, la asíntota pasa por -90° en ω = 10 rad/s, y es 0o cuando (ω/ωn) =0.1, es decir, ω =1 rad/s, y es -180° cuando (ω/ωn)= 10, o sea, ω =100 rad/s. La diferencia entre los valores verdaderos y los asintóticos se puede encontrar con base en la siguiente tabla. Para ζ =0.3 las diferencias son:
La figura 122 describe las trazas asintótica y verdadera considerando estas diferencias.
Especificaciones de desempeño

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
187
Figura 123 Especificaciones de desempeño
Para describir el comportamiento transitorio de un sistema cuando está sujeto a una entrada escalón se usan términos como tiempo de levantamiento, tiempo de asentamiento y sobrepaso (sobreimpulso). Cuando el sistema está sujeto a una entrada senoidal los términos que se usan para describir el desempeño del sistema son pico de resonancia y ancho de banda. El pico de resonancia, Mp, se define como el máximo valor de la magnitud (figura 123). Para un sistema con valor grande de Mp corresponde un valor grande del máximo sobrepaso. Un sistema de segundo orden se puede relacionar en forma directa con el factor de amortiguamiento relativo mediante la comparación de la respuesta con la traza de Bode de la figura 120; un factor de amortiguamiento relativo bajo corresponde a un pico de resonancia alto. El ancho de banda se define como la banda de frecuencias en la cual la magnitud no cae por debajo de -3 dB. Para el sistema dado en la traza de Bode de la figura 123 el ancho de banda es el espacio entre la frecuencia cero y la frecuencia en la que la magnitud cae por debajo de -3 dB. Puesto que
o sea, G(jω) = 0.707 y éste es el valor de corte para la función de respuesta en frecuencia.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
188
Uso de datos experimentales de la respuesta en frec uencia
Los datos de la respuesta en frecuencia para un sistema se pueden obtener en forma experimental mediante una señal senoidal como entrada y monitorear la salida en estado estable a fin de determinar el cociente de la magnitud de la salida entre la magnitud de la entrada (éste es entonces la magnitud) y la diferencia de fase entre la salida y la entrada. La medición se repite para varias frecuencias y, de esta manera, se obtiene la traza de Bode. Al examinar la traza de Bode se puede identificar la función de transferencia del sistema. Por lo general, la función de transferencia se determina a partir de la traza de magnitud y la traza de fase se usa para verificar los resultados. Sobre los datos experimentales se dibujan las asíntotas. Si la pendiente de la asíntota inicial es -20 dB/década, entonces hay un polo en el origen; si ésta es +20 dB/década hay un cero en el origen. Si la pendiente, al ir de una asíntota a la siguiente, cambia por -20 dB/década, entonces hay un polo real y la función de transferencia incluye un término 1/(TS +1), donde la frecuencia en el punto de cambio de la pendiente es 1/t. Si la pendiente cambia en +20 dB/década, entonces hay un cero real y la función de transferencia incluye un (ts +1), donde la frecuencia en el punto de cambio de la pendiente es 1/t. Si la pendiente, al ir de una asíntota a la siguiente, cambia en -40 dB/década hay un par de polos complejos y la función de transferencia incluye un término de la forma
donde ωn es la frecuencia en el cambio de la pendiente. Al determinar la diferencia entre la traza de magnitud y la asíntota en el punto de quiebre es posible estimar el factor de amortiguamiento relativo ζ, por medio de la tabla 5. Si la pendiente, al ir de
una asíntota a la siguiente, cambia en + 40 dB/década hay un par de ceros complejos y la función de transferencia incluye un término de la forma
donde ωn es la frecuencia en el cambio de la pendiente. La tabla 5 de esta lección se puede usar para dar un estimado del factor de amortiguamiento relativo, ζ. Todos los elementos que constituyen la función de transferencia se combinan para dar una función de transferencia que tiene una ganancia, K, incluida. La magnitud entonces se calcula a partir de la función de transferencia para algún valor de frecuencia y se compara con el valor experimental para dicho valor; por lo tanto, K se puede determinar.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
189
Figura 124 Ejemplo 56 Ejemplo 56 Determinar la función de transferencia del sistema dado por el diagrama de Bode que describe en la figura 124. Sólo se muestran las asíntotas. Respuesta Se tiene una pendiente inicial de -20 dB/década y, de esta manera, hay un término 1Is. Existe un cambio en la pendiente de -20 dB/década en ω = 1 rad/s y, así, se tiene un término 1/(ts +1) con t=1. No hay otros cambios en la pendiente de manera que la función de transferencia es de la forma
donde K es la ganancia. La función de respuesta en frecuencia para el sistema es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
190
Por lo tanto
La figura 124 indica que cuando 20 log | G(jω) | = 20, entonces ω = 1 rad/s. De esta manera
Por lo tanto, K = 14.1. De esta manera, la función de transferencia es
Lección 3. DISEÑO MEDIANTE COMPENSACION.
Compensación es el término que describe el ajuste de desempeño de un controlador a fin de que logre un mejor desempeño. Las trazas de Bode se pueden usar para observar los efectos de los cambios de diseño del compensador respecto a desempeño. Al introducir sólo un elemento proporcional, es decir, un elemento con ganancia constante, la traza de magnitud sólo se desplaza hacia arriba o hacia abajo y no tiene efecto en la traza de fase. Un compensador de adelanto en cascada tiene una función de transferencia de la forma:
donde p> z. Esta ecuación se puede reordenar para obtener
Los términos K y (z/p) son términos de ganancia constante, el término (1 + s/z) contiene un cero real con constante de tiempo de 1/z, y el término (1 + s/p) contiene

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
191
un polo real con constante de tiempo de 1 / p. Puesto que p > z, entonces (1/z) > (1/p). La traza de Bode es, por consiguiente de la forma que muestra la figura 125. Los valores dados son para K = 1 y para diferentes cocientes de (z/p). Cuando z = p y los términos de los ceros y polos se cancelan para dar G(s) = 1, entonces la magnitud es una línea recta a lo largo del eje en
Figura 125 Trazas de Bode para un compensador de adelanto
0 dB y la fase, una línea recta a lo largo del eje en 0o. El efecto de introducir un compensador de adelanto es bajar la traza de magnitud en frecuencias bajas y subir el ángulo de fase global, es decir, incrementar el ángulo de fase lo que adelanta la salida respecto a la entrada. Un compensador de atraso en cascada tiene una función de transferencia de la forma:
donde z > p. Esta ecuación se puede reordenar para obtener
Los términos K y (z/p) son términos de ganancia constante, el término (1 + s/z) contiene un cero real con constante de tiempo de 1Iz, y el término (1 + s/p) contiene

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
192
un polo real con constante de tiempo de 1/p. Puesto que z > p, entonces (1/p) > (1/z). La traza de Bode es, así, de la forma que muestra la figura 126. Los valores dados son para K = 1 y para diferentes cocientes de (z/p). Cuando z = p y los términos de los ceros y polos se cancelan para dar G(s) = 1, entonces la magnitud es una línea recta a lo largo del eje en 0 dB y la fase, una línea recta a lo largo del eje en 0o. El efecto de introducir un compensador de atraso es bajar la traza de magnitud en frecuencias altas e incrementar el ángulo de fase, lo que atrasa la salida en relación con la entrada.
Figura 126 Trazas de Bode para un compensador de atraso
Lección 4: DIAGRAMAS DE NYQUIST.
Para especificar el comportamiento de un sistema a una entrada senoidal (es decir, especificar la función de respuesta en frecuencia, G(jω)) en una frecuencia angular particular, ω, se deben establecer tanto la magnitud, | G(jω) | como la fase. Ambas son funciones de la frecuencia angular. Una forma de mostrar cómo se comporta un sistema sobre un intervalo de frecuencias angulares es trazar los datos de la respuesta para el sistema en un diagrama de Nyquist. El diagrama de Nyquist es una traza polar de la respuesta en frecuencia del sistema.
Un número complejo se puede representar mediante x + jy, donde x es la parte real y y la parte imaginaria. El número se puede trazar como un punto en un diagrama de Argand, es decir, un diagrama que tiene un eje y el cual representa la parte imaginaria y un ejex, que es la parte real. La versión polar del número complejo se representa mediante una línea √x2+y2 que se dibuja desde el origen formando un ángulo Φ con el eje real, donde tan Φ = y/x. Ambos métodos terminan en el mismo punto especificado en el diagrama de Argand.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
193
En el diagrama de Nyquist la salida para una entrada senoidal de amplitud unitaria en una frecuencia angular particular, se especifica mediante el trazo de una línea de longitud igual a la magnitud, | G(jω) | en un ángulo de fase, Φ, con el eje real. La entrada senoidal al sistema, de este modo, en efecto se representa mediante la línea de magnitud 1 a lo largo del eje real. Al trazar diagramas de Nyquist existen cuatro puntos claves que se deben representar: el inicio de la traza, donde ω=0; el fin de la traza, donde ω=∞; donde la traza cruza al eje real, es decir, Φ=0°±180°, y donde ésta cruza al eje imaginario, o sea, Φ= ±90°. Para un sistema de primer orden, o un sistema de atraso sencillo, la función de transferencia es de la forma
donde t es la constante de tiempo. De esta manera, la función de respuesta en frecuencia G(jω), es
Así, debido a que la magnitud |G(jω)| es la raíz cuadrada de la parte real al cuadrado más la parte imaginaria al cuadrado, entonces
La fase, Φ, está dada por el cociente de la parte imaginaria entre la parte real (ecuación [6])
Cuando ω = 0, entonces las ecuaciones [47] y [48] dan como resultado |G(jω)| = 1 y Φ = 0o. Éste es también el punto en el que la traza cruza el eje real. Cuando ω tiende

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
194
a ∞, entonces |G(jω)| tiende a 0 y Φ a -90°. Éste es también el punto en el que la traza cruza el eje imaginario. También se pueden calcular otros puntos para ayudar a dibujar la traza de Nyquist. Así, por ejemplo, cuando ω= 1/t, entonces |G(jω)| = 1/√2 y Ө =-tan_1 1 = -45°. La figura 127 muestra la traza de Nyquis t, la cual es un semicírculo. Considere ahora un sistema de segundo orden con una función de transferencia dada por
La función de respuesta en frecuencia G(jω), es de esta forma
Y por ello, la magnitud es
Y la fase está dada por

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
195
Figura 127 Trazado de Nyquist para G(s) = 1/(1+ts)
Figura 128 Trazado de Nyquist para G(s) = wn2(s2 + 2ζωns + ωn2)
Cuando ω= 0, entonces | G(jω)| = 1 y Φ= 0°. Cuando ω = ∞, entonces | G(jω)| = 0 y Φ = -180°. Éstos son los puntos en los que la traza cru za el eje real. Cuando ω=ωn, entonces | G(jω)| = 1/2 y Φ = - tan -1 (2ζ/0) = -90°. Éste es el punto en el que la traza cruza el eje imaginario. La figura 128 muestra las familias de las trazas de Nyquist producidas para diferentes factores de amortiguamiento relativo.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
196
La figura 129 muestra ejemplos adicionales de diagramas de Nyquist y sus diagramas asociados de lugar geométrico de las raíces.
Figura 129 Diagramas de Nyquist y sus diagramas de lugar geométrico de las raíces asociados:
a) G(s) = 1/(t1d+1),
b) G(s) = 1/(t1s+1) (t
2s+1),
c) G(s) = 1/(t1s+1) (t
2s+1) (t
3s+1),
d) G(s) = 1/s(t1s+1),
e) G(s) = 1/s(t1s+1) (t
2s+1),
f) G(s) = (ts+1)/s (t1s+1) (t
2s+1)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
197
Figura 129 Continuación
Ejemplo 57 Trazar el diagrama de Nyquist para un sistema que tiene una función de transferencia de
Respuesta La función de respuesta en frecuencia G(jω), es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
198
De esta manera, la magnitud es
y la fase es
Cuando ω = 0, entonces | G(jω) | = 1 y Φ = - tan-1 0 = 0o. Cuando ω = ∞ entonces |G(jω) |= 0 y
Los puntos de cruce con el eje real están dados por Φ = 0o o ±180°. El punto de 0 o está dado por ω = 0, como antes se indicó. Para Φ = -180°, tan Φ = -0 y así, se debe tener que
Esto significa que ω=0 √(3/2) =1.2 rad/s. Con este valor de frecuencia la magnitud tiene un valor de
o -0.3. Los puntos de cruce con el eje imaginario están dados por Φ= ±90°. La ω = +∞ da el punto de +90°, como ya se indicó. Para Φ = -90°, tan Φ = ∞ y, de este modo, se debe tener que

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
199
Esto significa que ω = 1 √3 = 0.6 rad/s. Con este valor de frecuencia = 0.2 rad/s la magnitud tiene un valor de
Figura 130 Ejemplo 57
o -0.7. Para ayudar a trazar el diagrama de Nyquist se pueden obtener otros valores. Así, para ω= 1 rad/s, |G(jω)| = 0.4 y Φ = -153°; para ω=0.5 rad/s|G(jω)|= 0.8 y Φ=68°; para ω=0.2 rad/s, |G(jω)| = 0.95 y Φ = 34°. La figura 130 muestra la traza de Nyquist resultante. Lección 5: CRITERIO DE ESTABILIDAD DE NYQUIST. Cuando a un sistema se aplica una entrada senoidal la salida de ese sistema es senoidal con la misma frecuencia angular, pero puede tener una amplitud que difiere de la de la entrada y mostrar una diferencia de fase. El cociente de las amplitudes de salida y de entrada es la magnitud, |G(jω)|. Para que la inestabilidad se presente cuando la entrada al sistema es senoidal, la magnitud en lazo abierto debe ser mayor que 1 si el atraso de fase en lazo abierto es 180°. Si el sistema causa un cambio de fase de 180°, entonces la señal de realimentación e stará en fase con la señal de entrada y, de esta manera, se adicionará a ésta en vez de sustraerse. Si la amplitud es menor que la de la señal de entrada, se puede alcanzar una condición estable, pero si la amplitud es mayor, la señal a través del sistema crecerá de manera conti-

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
200
nua. Si el sistema en lazo abierto es estable, el sistema en lazo cerrado también será estable. La figura 131 muestra la implicación de este criterio de estabilidad en relación al diagrama de Nyquist para un sistema en lazo abierto. Un ángulo de fase de 180° significa que la magnitud apunta hacia la parte negativa del eje real. Si la magnitud en este valor de fase no debe exceder a 1, entonces la traza polar no debe encerrar al punto -1 sobre el eje real si el sistema va a ser estable. Ejemplo 58 ¿Cuál es la condición para que un sistema con la siguiente función de transferencia en lazo abierto sea estable?
Respuesta La función de respuesta en frecuencia es
La magnitud es, de este modo
Y la fase

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
201
Para lograr estabilidad la magnitud no debe exceder 1 cuando la fase es 180°. De este modo, la condición limitante para la fase es Φ= - tan-1 0. Por lo tanto
y así, ω=1√t1t2. Al sustituir este valor de ω en la ecuación de la magnitud se obtiene
[53] Si el sistema va a ser estable, entonces
Figura 131 Trazas de Nyquist estable e inestable
Margen de ganancia y margen de fase El margen de ganancia se define como el factor mediante el cual la ganancia del sistema, es decir, la magnitud, se puede incrementar antes de que se presente la inestabilidad. Éste es, entonces, la cantidad mediante la cual la magnitud en 180° debe incrementarse para alcanzar el valor crítico de 1 (figura 132).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
202
Figura 132 Margen de ganancia
Figura 133 Margen de fase

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
203
Figura 134 Márgenes de ganancia y fase con las trazas de Bode
1 = Margen de ganancia |G(jω)|Φ=180º Éste en general se cuantifica en decibeles y de esta forma en decibeles es
Si la traza de Nyquist jamás cruza la parte negativa del eje real, el margen de ganancia es infinito. Si la traza pasa a través del eje en un valor menor que 1, el margen de ganancia es positivo. Si pasa a través del eje en 1, el margen de ganancia es cero y si pasa a través del eje en un valor mayor que 1, es decir, la traza encierra el punto -1, el margen de ganancia es negativo. El margen de fase se define como el ángulo a través del cual la traza de Nyquist debe girar para que el punto de magnitud unitaria pase a través del punto -1 en el eje real (figura 133). Esta es, por lo tanto, la cantidad mediante la cual la fase del sistema en lazo abierto cae cerca de 180° cuando su magnitud t iene un valor de 1, es decir, la amplitud de la salida es la misma que la de la entrada. La figura 134 muestra los márgenes de ganancia y fase en las trazas de Bode para un sistema.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
204
Ejemplo 59 Determinar el valor de K para un sistema con la siguiente función de transferencia en lazo abierto
el cual dará a) un sistema marginalmente estable, b) un margen de ganancia de 3 dB. Respuesta La función de respuesta en frecuencia en lazo abierto es
La magnitud es, entonces
y la fase
a) Para que el sistema sea marginalmente estable la magnitud debe tener el valor de
1, cuando Φ = 180°. Para Φ=180° entonces Φ = tan-1 0 y, de esta manera
Por lo tanto, ω = 1 /√2 rad/s. Al sustituir este valor en la ecuación de la magnitud, con la magnitud igual a 1, se obtiene

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
205
y, así, K = 1.5. b) Para que el sistema tenga un margen de ganancia de 3 dB, según la ecuación [54]
y así, K = 1.06. Ejemplo 60 ¿Cuál es el margen de fase para un sistema que tiene la siguiente función de transferencia en lazo abierto?
Respuesta La función de respuesta en frecuencia es
Por lo tanto, la magnitud es
y la fase
El margen de fase es el ángulo de fase más corto a partir de 180° cuando la magnitud es 1. Así,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
206
Si se usa la expresión para las raíces de una ecuación cuadrática y considerando ω2
como la raíz, entonces
y puesto que sólo interesan los valores positivos de ω, se tiene que ω = 2.36 rad/s. El ángulo de fase para esta magnitud es, por lo tanto
Figura 135 Ejemplo 60
Puesto que tanto la parte real como la imaginaria de G0 (jω) son negativas, este ángulo es el relativo a -180° y, de esta forma, es el margen de fase.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
207
CAPITULO 6: ANALISIS EN ESPACIO DE ESTADOS.
Introducción
Como ya se ha mencionado en este módulo, cada día los procesos a controlar se hacen más complejos, sistemas que deben controlar múltiples variables simultáneamente para generar múltiples salidas, por lo tanto la ingeniería tiene la responsabilidad de diseñar los procesos de automatización lo suficientemente robustos, capaces de satisfacer la necesidad de la industria. Desde esta perspectiva se hizo necesario otras herramientas de análisis y diseño de sistemas de control complejos basados en el concepto de estado, lo cual es evidentemente un análisis dinámico de los sistemas pero nos permite modelar matemáticamente plantas mucho más complejas, por lo tanto este nuevo análisis de los sistemas de control es el que desarrollaremos en este capítulo.
Lección 1: VARIABLES DE ESTADO.
En ingeniería de control, una representación de espacios de estados es un modelo matemático de un sistema físico descrito mediante un conjunto de entradas, salidas y variables de estado relacionadas por ecuaciones diferenciales de primer orden que se combinan en una ecuación diferencial matricial de primer orden. Para prescindir del número de entradas, salidas y estados, las variables son expresadas como vectores y las ecuaciones algebraicas se escriben en forma matricial (esto último sólo puede hacerse cuando el sistema dinámico es lineal e invariante en el tiempo). La representación de espacios de estado (también conocida como aproximación en el dominio del tiempo ) provee un modo compacto y conveniente de modelar y analizar sistemas con múltiples entradas y salidas. Con p entradas y q salidas, tendríamos que escribir veces la transformada de Laplace para procesar toda la información del sistema. A diferencia de la aproximación en el dominio de la frecuencia, el uso de la representación de espacios de estado no está limitado a sistemas con componentes lineales ni con condiciones iniciales iguales a cero. El espacio de estado se refiere al espacio de n dimensiones cuyos ejes coordenados están formados por variables de estados. El estado del sistema puede ser representado como un vector dentro de ese espacio.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
208
Figura 136. Modelo típico de espacio de estados
Variables de estado
Las “variables de estado” son el conjunto más pequeño de variables que pueden representar al sistema dinámico completo en un tiempo cualquiera. Las variables de estado deben ser linealmente independientes; una variable de estado no puede ser una combinación lineal de otras variables de estado. El número mínimo de variables de estado necesarias para representar un sistema dado n, es normalmente igual al orden de la ecuación diferencial que define al sistema. Si el sistema es representado en forma de función de transferencia, el número mínimo de variables de estado es igual al orden del denominador de la función de transferencia después de haber sido reducido a una fracción propia. Cabe destacar que al convertir una representación de espacios de estados a una forma de función de transferencia podría perderse alguna información interna sobre el sistema, indicando que dicho sistema es estable, cuando la representación de espacios de estados indica que es inestable en ciertos puntos. En circuitos eléctricos, el número de variables de estados es a menudo, pero no siempre, igual al número de elementos que almacenan energía en los circuitos, como capacitores e inductores.
Lección 2: SISTEMAS LINEALES.
Una forma general de representación de espacios de estado de un sistema lineal con p entradas, q salidas y n variables de estado se escribe de la siguiente forma:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
209
Donde
es llamado vector de estados , es llamado vector de salida , es
llamado vector de entradas (o control) , es la matriz de estados , es la
matriz de entrada , es la matriz de salida , y es la matriz de
transmisión directa . Por simplicidad, normalmente se toma como la matriz cero, p. ej.: se elije que el sistema no tenga transmisión. Nótese que en esta formulación general se supone que todas las matrices son variantes en el tiempo, p. ej.: algunos o todos sus elementos pueden depender del tiempo. La variable temporal t puede ser una "continua" (p. ej.: ) o una discreta (p. ej.: ): en éste último caso la variable temporal es generalmente indicada como k. Dependiendo de las consideraciones tomadas, la representación del modelo de espacios de estado puede tomar las siguientes formas:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
210
La estabilidad y la respuesta natural característica de un sistema pueden ser estudiadas mediante los eigen-valores (o valores propios) de la matriz A. La estabilidad de un modelo de espacio de estados invariante en el tiempo puede ser fácilmente determinado observando la función de transferencia del sistema en forma factorizada. Tendría una forma parecida a la siguiente:
El denominador de la función de transferencia es igual al polinomio característico encontrado tomando el determinante de sI − A,
.
Las raíces de este polinomio (los eigen-valores) proporcionan los polos en la función de transferencia del sistema. Dichos polos pueden ser utilizados para analizar si el sistema es asintótica o marginalmente estable. Otra alternativa para determinar la estabilidad, en la cual no involucra los cálculos de los eigen-valores, es analizar la estabilidad de Liapunov del sistema. Los ceros encontrados en el numerador de G(s) pueden usarse de manera similar para determinar si el sistema posee una fase mínima. El sistema podría ser estable con respecto a sus entradas

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
211
y salidas aún si es internamente inestable. Este podría ser el caso si polos inestables son cancelados por ceros.
Lección 3: CONTROLABILIDAD Y OBSERVABILIDAD .
En este capítulo introducimos los conceptos de controlabilidad y observabilidad. Estos conceptos describen la interacción entre el mundo externo (entradas y salidas) y las variables internas del sistema (estados). La controlabilidad es la propiedad que indica si el comportamiento de un sistema puede ser controlado por medio de sus entradas, mientras que la observabilidad es la propiedad que indica si el comportamiento interno del sistema puede detectarse en sus salidas.
Controlabilidad: Se dice que un sistema es controlable en el tiempo t0 si se puede transferir desde cualquier estado inicial x(t0) a cualquier otro estado, mediante un vector de control sin restricciones, en un intervalo de tiempo finito. Observabilidad: Se dice que un sistema es observable en el tiempo t0 si, con el sistema en el estado x(t0), es posible determinar este estado a partir de la observación de la salida durante un intervalo de tiempo finito. Kalman introdujo los conceptos de controlabilidad y observabilidad, que juegan un papel importante en el diseño de los sistemas de control en el espacio de estados. De hecho, las condiciones de controlabilidad y observabilidad determinan la existencia de una solución completa para un problema de diseño de un sistema de control. La solución a este problema puede existir si el sistema considerado no es controlable. Aunque la mayor parte de los sistemas físicos son controlables y observables, los modelos matemáticos correspondientes tal vez no poseen la propiedad de controlabilidad y observabilidad. En este caso, es necesario conocer las condiciones en las cuales un sistema es controlable y observable. Esta sección aborda la controlabilidad y en la siguiente analiza la observabilidad.
En lo que sigue, se deducirá en primer lugar la condición para garantizar controlabilidad completa del estado. A continuación, se obtendrán formas alternativas de dicha condición análisis análogo de la controlabilidad completa de salida. Finalmente se presenta el concepto de estabilizabilidad. Controlabilidad completa del estado de sistemas en tiempo continuo. Sea el sistema en tiempo continuo
[1]

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
212
donde x = vector de estados (vector de dimensión n) u = señal de control (escalar) A = matriz de n x n B = matriz de n x 1 Se dice que el sistema descrito es de estado controlable en t=t0, si es posible construir una señal de control sin restricciones que transfiera un estado inicial a cualquier estado final en un intervalo de tiempo finito t0 ≤ t ≤ t1 Si todos los estados son controlables, se dice que el sistema es de estado completamente controlable. Ahora se obtendrá la condición para controlabilidad completa del estado. Sin pérdida de generalidad, se supone que el estado final es el origen en el espacio de estados y que el tiempo inicial es cero, o t0 = 0. Se tiene entonces, como solución a la ecuación [1]:
[2]
Aplicando la definición de controlabilidad completa del estado recién establecida, se tiene
[3]
o bien
[4]
Si se tienen en cuenta las ecuaciones [3] y [4], e-At se puede escribir como
[5]
Al sustituir la Ecuación [5] en la Ecuación [4] se obtiene:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
213
[6]
Si se define
entonces la Ecuación [6] se convierte en
[7]
Si el sistema es de estado completamente controlable, entonces, dado cualquier estado inicial x(0), la Ecuación [7] debe satisfacerse. Esto requiere que el rango de la matriz n x n sea n. Es decir, la condición de controlabilidad se cumple si el rango de la matriz de controlabilidad es igual al orden del sistema.
De este análisis, se puede concluir la condición para controlabilidad completa del estado de la forma siguiente. Un sistema es de estado completamente controlable si y sólo si los vectores B, AB, .... An-1B son linealmente independientes, o la matriz n x n

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
214
es de rango n. El resultado recién obtenido se extiende al caso en el que el vector de control u es de dimensión r. Si el sistema se describe por
donde u es un vector de dimensión r, se demuestra que la condición para controlabilidad completa del estado es que la matriz n x nr
sea de un rango n, o que contenga n vectores columna linealmente independientes.
La matriz
se conoce comúnmente como matriz de controlabilidad.
EJEMPLO Sea el sistema dado por
El sistema no es de estado completamente controlable.
La verificación en matlab se realiza con la siguiente línea de comandos
A=[1 1;0 -1]; %se define la matriz A B=[1;0]; %se define la matriz B Control=[B A*B]; %se define la matriz de controlabilidad rank(Control); %se evalúa el rango de la matriz de controlabilidad
El resultado que nos arroja el matlab al evaluar el rango de la matriz de controlabilidad es 1. Por consiguiente, debido a que el orden del sistema es 2 (ya que existen dos estados), y el rango de la matriz de controlabilidad es 1, no coinciden los resultados y por lo tanto el sistema no es controlable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
215
EJEMPLO Sea el sistema dado por
Por tanto, el sistema es de estado completamente controlable. Al igual que en el ejemplo anterior, se puede verificar con matlab así: A=[1 1;2 -1]; %se define la matriz A B=[0;1]; %se define la matriz B Control=[B A*B]; %se define la matriz de controlabilidad rank(Control); %se evalúa el rango de la matriz de controlabilidad Al evaluar el rango de la matriz de controlabilidad, el resultado es 2, igual que el orden del sistema (dos estados), por lo que el sistema se define como completamente controlable. Forma alternativa de la condición para la controlab ilidad completa del estado . Considérese el sistema definido por
[8]
Donde x = vector de estado (vector de dimensión n) u = vector de control (vector de dimensión r) A = matriz n x n B = matriz n x r Si los valores propios de A son distintos, es posible encontrar una matriz de transformación P tal que

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
216
Obsérvese que, si los valores propios de A son distintos, los vectores propios de A también son distintos; sin embargo, lo contrario no es cierto. Por ejemplo, una matriz simétrica real con valores propios múltiples tiene n vectores propios distintos. Obsérvese también que columna de la matriz P es un vector propio de A asociado con λi(i=1, 2, ..., ri). Si se define
[9]
al sustituir la Ecuación [9] en la Ecuación [8], se obtiene
[10]
se puede reescribir la Ecuación [10] como
Si todos los elementos de cualquier fila de la matriz F son nulos, entonces la variable de estado correspondiente es no controlable por cualquiera de las ui. Por tanto, la condición de controlabilidad completa del estado es que, si los vectores propios de A son distintos, el sistema es de estado completamente controlable si y sólo si ninguna fila de P-1B tiene todos sus elementos cero. Es importante señalar que, a fin de aplicar esta condición para controlabilidad completa del estado, se debe poner en forma diagonal la matriz P-1AP Si la matriz A de la Ecuación [8] no posee vectores propios distintos, es imposible la diagonalización. En este caso, se transforma A en una forma canónica de Jordán.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
217
Por ejemplo, si A tiene valores propios λ1, λ1, λ1, λ4, λ4, λ6,…λn y tiene n — 3 vectores propios distintos, la forma canónica de Jordán de A es
Las submatrices cuadradas de la diagonal principal se denominan bloques de Jordán. Supóngase que encontramos una matriz de transformación S tal que
Si se define un nuevo vector de estado z mediante
[11]
entonces la sustitución de la Ecuación [11] en la Ecuación [8] da
[12]
La condición para controlabilidad completa del estado del sistema de la Ecuación [8] se expresa del modo siguiente: El sistema es de estado completamente controlable si y sólo si (1) no hay dos bloques de Jordán en J de la Ecuación [12] que estén asociados con los mismos valores propios, (2) los elementos de cualquier fila de S-
1B que corresponden a la última fila de cada bloque de Jordán no son todos cero y (3) los elementos de cada fila de S-1B que corresponden a valores propios distintos no son todos cero.
EJEMPLO Los sistemas siguientes son de estado completamente controlable:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
218
Los sistemas siguientes no son de estado completamente controlable.
Condición para controlabilidad completa del estado en el plano s. La condición para la controlabilidad completa del estado se puede plantear en términos de funciones de transferencia o matrices de transferencia. Se puede demostrar que una condición necesaria y suficiente para controlabilidad completa del estado es que no ocurra una cancelación en la función de transferencia o en la matriz transferencia. Si ocurre una cancelación, el sistema no puede controlarse en la dirección del modelo cancelado.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
219
EJEMPLO Sea la función de transferencia siguiente:
Es evidente que ocurre una cancelación del factor (s + 2.5) en el numerador y el denominador de la función de transferencia. Por tanto, se pierde un grado de libertad. Debido a esta cancelación, este sistema no es de estado completamente controlable.
Controlabilidad de la salida. En el diseño práctico de un sistema de control, se puede necesitar controlar la salida en lugar del estado del sistema. Una controlabilidad completa del estado no es condición necesaria ni suficiente para controlar la salida del sistema. Por esta razón, es conveniente definir de forma independiente la controlabilidad completa de la salida. Sea el sistema descrito mediante
donde x = vector de estado (vector de dimensión n) u = vector de control (vector de dimensión r) y = vector de salida (vector de dimensión n) A = matriz n x n B = matriz n x r C = matriz m x n D = matriz m x r Se dice que el sistema descrito es de salida completamente controlable si es posible construir un vector de control sin restricciones u(t) que transfiera cualquier salida inicial y(t0) a cualquier salida final y(ti-) en un intervalo de tiempo finito Es posible demostrar que la condición para controlabilidad completa de la salida es la siguiente. El sistema descrito mediante las Ecuaciones anteriores es de salida completamente controlable si y sólo si la matriz m x (n+ 1) r

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
220
es de rango m. Sistema no controlable. Un sistema no controlable tiene un susbsistema que está desconectado físicamente de la entrada.
Estabilizabilidad. Para un sistema parcialmente controlable, si los modos no controlables son estables y los modos inestables son controlables, el sistema se dice entonces que es estabilizable. Por ejemplo, el sistema definido por
no es de estado controlable. El modo estable que se corresponde con el valor propio -1 no es controlable. El modo inestable que corresponde al valor propio 1 es controlable. Este sistema se puede estabilizar mediante una realimentación adecuada. Así que este sistema es estabilizable. OBSERVABILIDAD En esta sección analizaremos la observabilidad de los sistemas lineales. Sea el sistema descrito mediante las ecuaciones siguientes:
[13]
[14]
Se dice que el sistema es completamente observable si el estado x(t0) se determina a partir de la observación de y(t) durante un intervalo de tiempo finito. t0 ≤ t ≤ t1. Por tanto, el sistema es completamente observable si todas las transiciones del estado afectan eventualmente a k elementos del vector de salida. El concepto de observabilidad es útil al resolver el pro-reconstruir variables de estado no medibles a partir de variables que sí lo son en el tiempo posible. En esta sección, se tratan

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
221
sólo sistemas lineales e invariantes en el tiempo, to, sin pérdida de generalidad, se supone que t0 = 0. El concepto de observabilidad es muy importante porque, en la práctica, la dificultad que se encuentra con el control mediante realimentación del estado es que algunas de las variables de estado no son accesibles para una medición directa, por lo que se hace necesario estimar las variables de estado no medibles para construir las señales de control. Tales estimaciones de las variables de estado son posibles si y sólo si son completamente observables. Al analizar las condiciones de observabilidad, se considera el sistema sin excitación como el que se obtiene mediante las Ecuaciones (13) y (14). La razón de esto es la siguiente. Si el sistema se describe mediante
y(r) es
Como las matrices A, B, C y D se conocen al igual que u(t), los dos últimos términos del segundo miembro de esta última ecuación son cantidades conocidas. Por tanto, se pueden restar del valor observado de y(t). Así, a fin de investigar una condición necesaria y suficiente para observabilidad completa, basta con considerar el sistema descrito mediante las Ecuaciones (13) y (14). Observabilidad completa de sistemas en tiempo conti nuo. Sea el sistema descrito mediante las Ecuaciones (13) y (14). El vector de salida y(t) es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
222
Refiriéndose a la Ecuación (4) y (5), se tiene que
Por tanto, se obtiene
O bien
[15]
Así, si el sistema es completamente observable, dada la salida y(t) durante un intervalo del tiempo 0 ≤ t ≤ t1x x(0) se determina únicamente a partir de la Ecuación (15). Se demuestra que esto requiere que el rango de la matriz nm x n
sea n. A partir de este análisis, se puede expresar la condición para observabilidad completa del modo siguiente. El sistema descrito por las Ecuaciones (13) y (14) es completamente observable si y sólo si la matriz n x nm

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
223
es de rango n, o tiene n vectores columna linealmente independientes. Esta matriz se denomina matriz de observabilidad.
EJEMPLO 61. Sea el sistema descrito por
¿Es este sistema controlable y observable?
Respuesta
Como el rango de la matriz
es 2, el sistema es de estado completamente controlable.
Para la controlabilidad de salida, se calcula el rango de la matriz [CB І CAB]. Como
el rango de esta matriz es 1. Por tanto, el sistema tiene una salida completamente controlable. Para verificar la condición de observabilidad. examine el rango de [C* І A*C*]. Como
el rango de [C* І A*C*] es 2. Por tanto, el sistema es completamente observable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
224
Condiciones para observabilidad completa en el plan o s. Las condiciones para observabilidad completa también se pueden expresar en términos de funciones de transferencia o de transferencia. La condición necesaria y suficiente para observabilidad completa es que ocurra una cancelación en la función de transferencia o en la matriz de transferencia. Si ocurre una cancelación, el modo cancelado no se puede observar en la salida. EJEMPLO 62. Demuestre que el siguiente sistema no es completamente observable.
Tome en cuenta que la función de control u no afecta a la observabilidad completa del sistema. Para examinar la observabilidad completa, simplemente se hace u = 0. Para este sistema, se tiene que
Considere que
Por tanto, el rango de la matriz [C* І A*C* І (A*)2 C*] es menor que 3. Así, el sistema no es completamente observable. De hecho, en la función de transferencia del sistema ocurre una cancelación. La función de transferencia entre X1(s) y U(s) es

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
225
y la función de transferencia entre Y(s) y X1(s) es
Por tanto, la función de transferencia entre la salida Y(s) y la entrada U(s) es
Es evidente que los dos factores (s + 1) se cancelan uno al otro. Esto significa que no hay condiciones iniciales x(0) diferentes de cero que no se determinen a partir de la medición de y(t). Comentarios. La función de transferencia no presenta cancelación si y sólo si el sistema es de estado completamente controlable y es completamente observable. Esto significa que la función de transferencia cancelada no transporta toda la información que caracteriza al sistema dinámico. Forma alternativa de la condición para observabilid ad completa. Sea el sistema descrito por las Ecuaciones (13) y (14), vuelto a escribir como
[16] [17]
Supóngase que la matriz de transformación P transforma A en una matriz diagonal, o

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
226
donde D es una matriz diagonal. Si se define
de esta forma, las Ecuaciones (16) y (17) pueden escribirse
o bien
El sistema es completamente observable si ninguna de las columnas de la matriz CP está formada sólo por elementos cero. Esto se debe a que, si la í-ésima columna de CP está formada sólo por elementos cero, la variable de estado zi(0) no aparecerá en la ecuación de salida y por tal razón, no puede determinarse a partir de la observación de y(r). En este caso, x(0) la relación con z(0) mediante la matriz P no singular, no puede determinarse. (Recuérdese que esta prueba sólo se aplica si la matriz P-1 AP está en forma diagonal.) Si la matriz A no se transforma en una matriz diagonal, mediante una matriz de transformación adecuada S, se puede transformar A en su forma canónica de Jordán, o
donde J está en la forma canónica de Jordán. Se define

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
227
En este caso, las Ecuaciones (16) y (17) pueden escribirse
El sistema es completamente observable si (1) no hay dos bloques de Jordán en J asociados con los mismos valores propios, (2) no hay columnas de CS que correspondan a la primer cada bloque de Jordán que estén formadas por elementos cero y (3) no hay columnas de correspondan a valores propios distintos que estén formadas por elementos cero. Para aclarar la condición (2), en el Ejemplo 63 hemos enlazado mediante trazos discontinuos las columnas de CS que corresponden a la primera fila de cada bloque de Jordán
EJEMPLO 63. Los sistemas siguientes son completamente observables.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
228
Principio de dualidad. A continuación se analiza la relación entre controlabilidad y observabilidad. Se introducirá el principio de dualidad, debido a Kalman, para aclarar las analogías evidentes entre controlabilidad y observabilidad.
Sea el sistema S1 descrito mediante
donde x = vector de estado (vector de dimensión n) u = vector de control (vector de dimensión r) y = vector de salida (vector de dimensión m) A = matriz n x n B = matriz n x r C = matriz m x n y el sistema dual S2 definido mediante
donde z = vector de estado (vector de dimensión n) v = vector de control (vector de dimensión m) n = vector de salida (vector de dimensión r) A* = transpuesta conjugada de A B* = transpuesta conjugada de B C* = transpuesta conjugada de C

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
229
El principio de dualidad plantea que el sistema S1, es de estado completamente controlable (observable) si y sólo si el sistema S2 es de estado completamente observable (controlable). Para verificar este principio, se escriben las condiciones necesarias y suficientes para controlabilidad completa del estado y observabilidad completa de los sistemas S1 y S2
Para el sistema S1: 1. Una condición necesaria y suficiente para controlabilidad completa del estado es que el rango de la matriz n x nr
Sea n
2. Una condición necesaria y suficiente para observabilidad completa es que el rango de la matriz n x nm
sea n. Para el sistema S2:
1. Una condición necesaria y suficiente para controlabilidad completa del estado es que el rango de la matriz n x nm
sea n. 2. Una condición necesaria y suficiente para observabilidad completa es que el rango de la matriz de n x nr
Sea n

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
230
Si se comparan estas condiciones, la verdad de este principio es evidente. A partir de él, la observabilidad de un sistema determinado se verifica probando la controlabilidad del estado dual. Detectabilidad. Para un sistema parcialmente observable, si los modos no observables son estables y los modos observables son inestables, se dice que es detectable. Obsérvese que el concepto de detectabilidad es dual al concepto de estabilizabilidad.
Gramiano de obs ervabili dad.
Si la matriz A es Hurwitz, la integral Wo(t) s converge para t = 1 . En ese
caso notamos simplemente W0 (t ) = W0 y se llama gramiano de observabilidad. Si el par (A, C) es observable, entonces la matriz de observabilidad
es de rango n. Esta condición, si la matriz A es Hurwitz, garantiza que W0 es la única solución, y positiva definida, de la ecuación
Las funciones MATLAB Ob=obsv(A,C) y Wo=gram(A’,C’)’ calculan respectivamente la
matriz de observabilidad O y el gramiano de observabilidad W0 . Chequeando el
rango de O o W0 determinamos si un sistema es observable.
Criterio de estabilidad de JURY.
La prueba de estabilidad de Jury es un algoritmo que se aplica directamente sobre los coeficientes de un polinomio, sin tener que resolver las raíces. Dicho polinomio será la ecuación característica P(z) = 0. Esta prueba revela la existencia de cualquier raíz inestable (raíces en el plano z que se presentan fuera del círculo unitario). Sin embargo, no da la localización de las raíces inestables. Se limita a comprobar si las raíces de la ecuación característica P(z) = 0 están dentro del círculo unidad.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
231
Al aplicar la prueba de estabilidad de Jury a una ecuación característica dada P(z) = 0, construimos una tabla cuyos elementos se basan en los coeficientes de P(z). Supongamos que la ecuación característica P(z) es un polinomio en z como el siguiente:
donde a0 ≥ 0
Entonces la tabla de Jury se construye como se muestra a continuación:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
232
Los elementos de la primera fila están formados por los coeficientes en P(z) ordenados en orden de potencias ascendentes de z. Los elementos de la segunda fila son los mismos, pero en orden inverso (potencias descendentes de z). Los elementos de las demás filas se obtienen mediante los siguientes determinantes:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
233
y así sucesivamente hasta llegar a
Nótese que la última fila de la tabla está formada por tres elementos. Para sistemas de segundo orden, 2n-3 = 1 y la tabla de Jury está formada por una sola fila, de tres elementos. Los elementos de las filas pares son los mismos que los de la fila impar anterior, pero en orden inverso.
Criterio de estabilidad mediante la prueba de Jury. Un sistema con la ecuación característica P(z) = 0 dada en potencias de z de la forma
donde a > 0, es estable (todas sus raíces dentro del círculo unitario), si todas las condiciones siguientes se satisfacen:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
234
Esta última condición sólo hay que probarla para sistemas de tercer orden o superiores: para un sistema de segundo orden, la tabla de Jury consta de una sola fila.
Lección 4: DISEÑO DE SISTEMAS DE CONTROL EN EL ESPA CIO DE ESTADOS. Pasos para el diseño en el espacio de estados Una de las características atractivas del diseño de control utilizando el método del diseño de espacio de estados es que el mismo consiste en una secuencia independiente de pasos. Dichos pasos son los que describimos a continuación: 1) Diseño de la ley de control : Se supone que se cuenta en todo momento con el valor de cada uno de los estados de la planta a controlar, y se determina la acción de control u (entrada de control a la planta) como una combinación lineal de los estados. Los coeficientes de esa “retroalimentación de estados” los agrupamos en el vector que denominamos –K (ver figura 137). La determinación de K, para los sistemas controlables, está unívocamente ligada a los autovalores del sistema retroalimentado y el problema se reduce en asignar un conjunto de autovalores que correspondan con una performance temporal satisfactoria en términos de tiempo de crecimiento, tiempo de establecimiento, sobrepico, etc.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Figura 137. Ley de control por retroalimentación completa de los estados. 2) Construcción del observadortodos los estados de la planta, y por lo tanto es habitual no contar los valores de los estados de la planta para realizar la retroalimentación de estados que se mencionó en el paso anterior. Por lo tanto, es necesario construir un estimador (los dos términos se refierenlos estados de la planta a partir de la acción de control y la medición y (salida de la planta). Veremos que siempre es posible realizar la construcción de dicho observador si el sistema es observable. 3) Combinación de la ley de control con el estimadorobservador, determinamos la acción de control los estados estimados de la planta: dichos (ver figura 138). Cabría preguntarse si la construcción del controlador de éstmodo no cambia la posición de los polos del sistema retroalimentado. La respuesta a esta inquietud, es que así conserva los polos definidos por la ley de control, con adición de los polos del estimador.
Figura 138. Combinación de la ley de control con el estimador. 4) Entrada de referenciasistema planta/controlador funciona correctamente como regulador: para volver al punto de equilibrio a partir de una condición inicial distinta a ese punto de equilibrio, o para el rechazo de perturbac
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
. Ley de control por retroalimentación completa de los estados.
Construcción del observador : Es muy raro que uno cuente con “mediciones” de todos los estados de la planta, y por lo tanto es habitual no contar los valores de los estados de la planta para realizar la retroalimentación de estados que se mencionó
o anterior. Por lo tanto, es necesario construir un estimador (los dos términos se refieren exactamente a lo mismo), que en todo momento estime los estados de la planta a partir de la acción de control u que se ejerce sobre la planta
(salida de la planta). Veremos que siempre es posible realizar la construcción de dicho observador si el sistema es observable.
Combinación de la ley de control con el estimador : Una vez observador, determinamos la acción de control u, alimentando la ley de control con los estados estimados de la planta: , en vez de utilizar los estados
). Cabría preguntarse si la construcción del controlador de éstmodo no cambia la posición de los polos del sistema retroalimentado. La respuesta a esta inquietud, es que así construido el controlador, el sistema retroalimentado conserva los polos definidos por la ley de control, con adición de los polos del
. Combinación de la ley de control con el estimador.
Entrada de referencia : Con el controlador armado hasta el paso anterior, el sistema planta/controlador funciona correctamente como regulador: para volver al punto de equilibrio a partir de una condición inicial distinta a ese punto de equilibrio, o para el rechazo de perturbaciones. Distinto es el caso de pretender que la salida
x̂
235
. Ley de control por retroalimentación completa de los estados.
: Es muy raro que uno cuente con “mediciones” de todos los estados de la planta, y por lo tanto es habitual no contar los valores de los estados de la planta para realizar la retroalimentación de estados que se mencionó
o anterior. Por lo tanto, es necesario construir un estimador u observador exactamente a lo mismo), que en todo momento estime
que se ejerce sobre la planta (salida de la planta). Veremos que siempre es posible realizar la
: Una vez construido el , alimentando la ley de control con
de utilizar los estados x propiamente ). Cabría preguntarse si la construcción del controlador de éste
modo no cambia la posición de los polos del sistema retroalimentado. La respuesta a el controlador, el sistema retroalimentado
conserva los polos definidos por la ley de control, con adición de los polos del
. Combinación de la ley de control con el estimador.
: Con el controlador armado hasta el paso anterior, el sistema planta/controlador funciona correctamente como regulador: para volver al punto de equilibrio a partir de una condición inicial distinta a ese punto de equilibrio, o
iones. Distinto es el caso de pretender que la salida y del

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
sistema, “siga” la evolución de una señal deseada de referencia cómo introducimos en el esquema anterior (figura sencilla de realizarla es como sal estimador la señal medida medición (y-r). Esta forma de introducir la entrada a referencia es semejante a la que se utiliza en control clásico, pero como veremos no es la única manera de introducir la referencia en el sistema, y que hay maneras más convenientes que ésta. De la manera que el sistema ha sido retroalimentado, la posición de los polos de la función transferencia entre la refereVeremos que según cómo introduzcamos esta señal de referencia controlador, tendremos la capacidad de mover los ceros de la función de transferencia mencionada.
Figura Ley de control El primer paso en el método de diseño de control en variable de estado como se mencionó anteriormente es encontrar la ley de control de retroalimentación de una combinación lineal de las variables de estado.Esta combinación lineal la podemos expresar como el siguiente producto de vectores:
Para la retroalimentación estamos asumiendo que disponemos de todos los elementos del vector de estado. En la práctica esta suposición es completamente
=u
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
sistema, “siga” la evolución de una señal deseada de referencia cómo introducimos en el esquema anterior (figura 138), dicha señal. La manera más sencilla de realizarla es como se muestra en la figura 139, donde enal estimador la señal medida y, se le alimenta con la diferencia entre la referencia y la
). Esta forma de introducir la entrada a referencia es semejante a la que ásico, pero como veremos no es la única manera de introducir
la referencia en el sistema, y que hay maneras más convenientes que ésta. De la manera que el sistema ha sido retroalimentado, la posición de los polos de la función transferencia entre la referencia r y la salida y quedan completamente definidos. Veremos que según cómo introduzcamos esta señal de referencia controlador, tendremos la capacidad de mover los ceros de la función de transferencia mencionada.
Figura 139. Ejemplo de entrada de referencia.
El primer paso en el método de diseño de control en variable de estado como se mencionó anteriormente es encontrar la ley de control de retroalimentación de una combinación lineal de las variables de estado.
combinación lineal la podemos expresar como el siguiente producto de vectores:
Para la retroalimentación estamos asumiendo que disponemos de todos los elementos del vector de estado. En la práctica esta suposición es completamente
[ ]
⋅−=−
n
n
x
x
x
kkkxK:
..... 2
1
21
236
sistema, “siga” la evolución de una señal deseada de referencia r. El problema es ), dicha señal. La manera más
, donde en vez de introducir alimenta con la diferencia entre la referencia y la
). Esta forma de introducir la entrada a referencia es semejante a la que ásico, pero como veremos no es la única manera de introducir
la referencia en el sistema, y que hay maneras más convenientes que ésta. De la manera que el sistema ha sido retroalimentado, la posición de los polos de la función
quedan completamente definidos. Veremos que según cómo introduzcamos esta señal de referencia r dentro del controlador, tendremos la capacidad de mover los ceros de la función de
El primer paso en el método de diseño de control en variable de estado como se mencionó anteriormente es encontrar la ley de control de retroalimentación de una
combinación lineal la podemos expresar como el siguiente producto de vectores:
Ec. [1]
Para la retroalimentación estamos asumiendo que disponemos de todos los elementos del vector de estado. En la práctica esta suposición es completamente

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
237
poco probable, puesto que si tenemos la capacidad de medir todos los estados (no siempre es el caso ya que pueden existir estados que no se pueden medir), económicamente no tiene sentido, puesto que los sensores son unas de las partes más caras del lazo de control y tener que comprar un sensor para cada una de las variables de estado sabiendo que el problema se puede solucionar con uno solo de los sensores es un encarecimiento innecesario del sistema de control. Como vemos de la ecuación [1], si tenemos un sistema de orden n, el vector de incógnitas K es de n componentes. Por ser un sistema de orden n, también tenemos la capacidad de escoger la posición de n autovalores. Por lo tanto tenemos n grados de libertad (cada uno de los componentes del vector K), para determinar las n posiciones de los autovalores del sistema. Sustituyamos la ley de retroalimentación (ec. [1]) dentro de la ecuación de estado del sistema:
Ec. [2] Y por lo tanto ahora con la retroalimentación de estados el sistema pasa a ser un sistema autónomo, cuya dinámica está regida por los autovalores de la matriz (A-B.K); o sea los lugares del plano s que cumple con la ecuación característica:
Ec. [3] Esta ecuación origina un polinomio mónico de grado n. Escogiendo los nuevos autovalores del sistema en s1, s2, … sn, dá origen también a un polinomio mónico de grado n al cual llamamos αc(s):
Ec. [4] Igualando coeficiente a coeficiente estos dos polinomios (ec. [3] y [4]) obtenemos n ecuaciones, dentro de las cuales están nuestras n incógnitas (los elementos del vector K). De esta manera, resolviendo el sistema de ecuaciones de nxn, podemos obtener el vector de ganancias K de retroalimentación. El trabajo de ubicar las raíces de la ecuación característica lo veremos con mayor detenimiento en un próximo punto, pero generalmente esta tarea requiere de un proceso de iteración del diseñador.
( ) xKBAxKBxAx ⋅⋅−=⋅⋅−⋅=•
[ ] 0.Idet =+−⋅ KBAs
( ) ( ) ( ) ( )nc sssssss −⋅⋅⋅−⋅−= 21α

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
238
Ejemplo: Pretendemos controlar un oscilador no-amortiguado de frecuencia ω0, donde una de sus representaciones por variable de estado es la siguiente:
Los requerimientos de control exigen colocar los dos autovalores del sistema controlado en una posición amortiguada dos veces más rápida que la frecuencia de oscilación, o sea en la posición del plano s = -2.ω0. Veamos primero que efectivamente el sistema es un oscilador no-amortiguado. Para ello hallemos los autovalores de la matriz A que son las raíces de la siguiente ecuación característica:
Cuyas raíces son como esperábamos: s = ±j.ω0. (oscilador no-amortiguado de frecuencia ω0). Por los requerimientos de control queremos que la ecuación característica sea:
La ecuación característica aplicando la retroalimentación de estado es la siguiente:
Igualando coeficiente a coeficiente de ambos polinomios, obtenemos las siguientes dos ecuaciones:
ux
x
x
x ⋅
+
⋅
−=
•
•
1
0
0
10
2
120
2
1
ω
( ) 20
220
20
1det
0
10
0
0detIdet ω
ωω+=
−=
−−
=−⋅ s
s
s
s
sAs
( ) ( ) 200
220 442 ωωωα ⋅+⋅⋅+=⋅+= ssssc
( ) [ ]
++−
=
⋅
+
−−
=⋅+−⋅
2120
2120
1det
1
0
0
10
0
0detIdet
ksk
skk
s
sKBAs
ωω
( ) 1202
2Idet kkssKBAs ++⋅+=⋅+−⋅ ω

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
239
por el término en s:
por el término independiente:
Y por lo tanto, el vector K de retroalimentación queda definido como:
Ley de control para sistema de orden mayor La determinación del vector K llega a ser una tarea sencilla en sistema de bajo orden, pero se vuelve una tarea más complicada cuanto mayor es el orden del sistema. Para facilitar esa tarea, resulta conveniente pasar la representación de variables de estado a su forma canónica de controlabilidad. De esta manera el vector de ganancias de retroalimentación K se determina muy fácilmente. Veamos para eso, cómo es la representación de variables de estado en su forma canónica de controlabilidad:
Ec. [5] Con esta estructura especial que tiene la matriz A, el polinomio de su ecuación característica es:
02 4 ω⋅=k
201
20 4 ωω ⋅=+k
[ ]020 43 ωω ⋅⋅=K

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
240
Ec. [6] Calculemos en esta forma canónica cómo es la matriz que representa la dinámica del sistema retroalimentado:
Ec. [7] Que sigue teniendo la misma estructura que la matriz Ac original, y por lo tanto el polinomio de su ecuación característica será por consiguiente:
Ec. [8] Y si el polinomio característico deseado de los autovalores es:
Ec. [9] La determinación de los componentes del vector de ganancia K de retroalimentación de estados se hace fácilmente:
Ec. [10]
nnnnn asasasas +⋅+⋅⋅⋅+⋅+⋅+ −−−
12
21
1
⋅
−−−−−−
=⋅−
0...00
:::
0...10
0...01
...2211 cnncc
ccc
kakaka
KBA
)()()()( )1(12
221
11 cnnncnn
cn
cn kaskaskaskas ++⋅++⋅⋅⋅+⋅++⋅++ −−
−−
nnnnn ssss ββββ +⋅+⋅⋅⋅+⋅+⋅+ −
−−1
22
11

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
241
Por lo tanto, el procedimiento para determinar el vector K en sistemas de alto orden consistiría en hallar la matriz de transformación de estados T que lleve el sistema original a su forma canónica de controlabilidad. Ya en su nueva representación determinar el vector de retroalimentación Kc en esa representación, y finalmente llevar éste vector a su representación original a través de la matriz de transformación T. Observar que un sistema podemos siempre llevarlo a la forma canónica de controlabilidad si el sistema es controlable, y siempre podemos encontrar el vector de retroalimentación K si podemos llevarla a dicha representación. La inversa también se da, no podemos hallar el vector de retroalimentación K si el sistema no es controlable (por ende no podemos llevarlo a su representación en la forma canónica de controlabilidad). Éste método de hallar el vector de retroalimentación K se puede sistematizar y reducir a una simple fórmula, conocida como la fórmula de Ackermann, donde el vector de retroalimentación K (en la representación original del sistema) se determina como:
Ec. [11]
donde C es la matriz de controlabilidad que es: y αc(.) es el polinomio característico que define las raíces deseadas de la ley de control, que se evalúa en la matriz A del sistema (notar que para evaluar el polinomio en la matriz, todos los términos del polinomio deben ser matrices de nxn, y por lo tanto el término independiente debe multiplicarse por la matriz identidad de nxn). Cabe también remarcar que esta fórmula siempre puede evaluarse, siempre y cuando la matriz de controlabilidad C sea invertible, y esto será así siempre que el sistema sea controlable. Ejemplo: Apliquemos la fórmula de Ackermann al problema del último ejemplo. El polinomio característico deseado era:
por lo tanto su evaluación en la matriz A es:
[ ] ( )AK cα⋅⋅= −110...0 CCCC
[ ]BABABAB n ⋅⋅⋅= − )1(2 ...CCCC
( ) 200
2 44 ωωα ⋅+⋅⋅+= sssc
( )
⋅⋅−⋅⋅
=
⋅⋅+
−⋅⋅+
−⋅
−=
20
30
0202
020
020
20 34
43
10
014
0
104
0
10
0
10
ωωωωω
ωω
ωωα Ac

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
242
La matriz de controlabilidad es:
Coincide que su inversa es justamente la misma matriz. Y aplicando la fórmula de Ackermann volvemos a obtener nuevamente el vector K de retroalimentación de estados:
Que obviamente coincide con el resultado obtenido anteriormente. Ejemplo: Para el sistema cuya representación de estados es la siguiente:
Buscar el vector de retroalimentación de estados K que cumpla con la siguiente ecuación característica:
Primero, veamos que z0 es un cero del sistema. Para eso busquemos cuánto vale la función de transferencia de u a y. Recordemos la fórmula (en cursos anteriores de sistemas dinámicos) para pasar de espacio de estados a función de transferencia:
Para facilitar las cosas, implementamos en matlab el siguiente algoritmo:
[ ]
=
⋅
−
=⋅=
01
10
1
0
0
10
1
020ω
BABCCCC
[ ] [ ]0202
030
020 43
34
43
01
1010 ωω
ωωωω
⋅⋅=
⋅⋅−⋅⋅
⋅
⋅=K
−−
=012
17A
−=
0
1
zB
[ ]01=C 0=D
( ) 22 2 nnc sss ωωξα +⋅⋅⋅+=

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
243
syms s;syms zo ; %para poder trabajar con símbolos s y z A=[-7 1;-12 0]; %se define la matriz A B=[1; -zo]; %se define la matriz B C=[1 0]; %se define la matriz C D=0; %se define la matriz D I=[1 0;0 1]; %se define la matriz identidad (2 orden) G=C*inv(s*I-A)*B+D; %fórmula para pasar de espacio de estados a función de transferencia Se obtiene entonces el siguiente resultado en matlab: G = s/(s^2 + 7*s + 12) - zo/(s^2 + 7*s + 12) Es decir:
Encontremos ahora cuánto vale la ecuación característica del sistema retroalimentado:
Por lo tanto debe cumplirse que:
Resolviendo este sistema de ecuaciones de 2x2, obtenemos cuánto deben valer cada una de las componentes del vector K de retroalimentación:
( )2010
21
2010
21
12
17
12
17.Idet
kzskz
kks
kzkz
kk
s
sKBAs
⋅−⋅−−++
=
⋅−⋅−+
−+=+−⋅
( ) ( ) ( ) ( ) ( )11277.Idet 2102012012 −⋅⋅−−⋅⋅+−⋅⋅−++=+−⋅ kkzkzkskzksKBAs
( ) ( ) 102202012 121277.Idet kzkkzskzksKBAs ⋅−+⋅−⋅⋅−⋅⋅−++=+−⋅
nkzk ωξ ⋅⋅=⋅−+ 27 201
210220 12712 nkzkkz ω=⋅−⋅−⋅⋅−

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
244
De este resultado podemos destacar dos cosas: - Sabemos que cuanto más cercano el cero de la planta (z0) esté de los polos
de la misma (s = -3 ó -4), el sistema será más “difícil de controlar”; esto se traduce que las componentes del vector K se hacen cada vez más grande (requiriendo un mayor esfuerzo de la acción de control). En el límite, cuando el sistema no es controlable, las componentes del vector K se hacen infinito.
- Si requerimos también que el sistema actúe con mayor velocidad (que el tiempo de crecimiento sea más chico y por lo tanto que el ωn sea más grande), vemos que exigen también que las componentes del vector K sean más grande (en valor absoluto), y por lo tanto exigiendo también un mayor esfuerzo en la acción de control.
Elección de la ubicación de las raíces de la ley de control Por lo que acabamos de ver, el esfuerzo de control está relacionado con lo lejos que se hayan movido los polos originales de la planta, y por lo tanto es una competencia entre una mejor performance de la respuesta dinámica del sistema y un menor esfuerzo de la acción de control requerida. Además, también tenemos que los ceros originales de la planta atraen a los polos, y por lo tanto se hace difícil apartar un polo de un cero que se encuentre cercano. Pero por otro lado, el comportamiento dinámico debido a un par de polo/cero cercanos se anula mutuamente. En este sentido, conviene dejar este polo en su ubicación original y tratar de satisfacer los requerimientos de la respuesta dinámica moviendo los polos restantes. Entonces la filosofía de ubicar los polos de la ley de control consiste en reparar solo los defectos que tiene la respuesta de lazo abierto. Veremos tres metodologías distintas para elegir la ubicación de los polos de la ley de control, que son:
- Segundo orden dominante. - Diseño de prototipos. - Lugar geométrico de las raíces simétrico.
Segundo orden dominante En este método, se elige la posición de los polos de manera tal que se satisfagan los requerimientos de la respuesta transitoria, como son tiempo de crecimiento, tiempo
( ) ( )( ) ( )43
72123714
00
20
1 +⋅+−⋅⋅⋅+−−⋅⋅⋅
=zz
zk nnn ωξωωξ
( )( ) ( )43
1227
00
20
2 +⋅+−+⋅⋅−⋅
=zz
zk nn ωωξ

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
245
de establecimiento, sobrepico, etc. El resto de los polos se eligen que se encuentren alejados de éstos en un factor 4 para que no influyan en la respuesta transitoria, tratando de no moverlos demasiado, y tratando además de amortiguarlos. Si existen ceros en la planta original, como los mismos permanecen una vez cerrado el lazo de control, debería buscarse que los polos dominantes sean lo suficientemente lentos como para no ver la influencia de los ceros. En el caso de no ser posible, podría ubicarse uno de los polos restantes en la cercanía de ese cero para acotar su influencia sobre la respuesta transitoria. Un caso típico de sistemas a controlar, son algunos sistemas mecánicos que poseen modos de alta frecuencia poco amortiguados y un par de modos de cuerpo rígido, que son de baja frecuencia. Para estos tipos de sistemas se busca satisfacer los requerimientos de la respuesta transitoria con los modos de cuerpo rígido, y los modos vibratorios de alta frecuencia se los deja con la misma frecuencia (ωn) pero trasladándolos al eje real para amortiguarlos. Diseño de prototipo En este tipo de método, se ubican las n raíces de la ecuación característica en lugares predeterminados según un conjunto de polinomios que satisfacen algún tipo de criterio normalizado con alguna frecuencia típica que requerimos que el sistema tenga. Por ejemplo, Graham y Lathrop (1953) propusieron para plantas de distinto orden, cuál era el polinomio característico que minimizaba un cierto índice conocido como la Integral del Valor Absoluto del Error multiplicado por el tiempo (índice I. T. A. E. – siglas en inglés: Intergral Time Absolute Error) ante la presencia de un escalón a la entrada.
En fórmulas, el índice I.T.A.E. se calcula como:
Ec. [12] Los polinomios que Graham y Lathrop obtuvieron, fueron los siguientes, donde ω0 es la frecuencia de corte que habíamos mencionado:
n Ubicación de los polos según el criterio ITAE 1
2
3
( ) dttetI ITAE ⋅⋅= ∫∞
0
+1
0ωs
⋅±+ 7.07.0
0
js
ω
⋅±+⋅
+ 068.1521.07081.0
00
jss
ωω

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
246
4
5
La respuesta de estos polinomios da en general con un sobrepico. Si por los requerimientos de control se necesita que la respuesta no posea sobrepico, entonces, se pueden utilizar los polinomios de Bessel de grado n:
n Ubicación de los polos según polinomios de Bessel 1
2
3
4
Aunque con estos polinomios tenemos la ventaja de eliminar el sobrepico, tenemos la desventaja de que la respuesta se torna algo más lenta en comparación con los polinomios según el criterio ITAE. Observaciones respecto a ésta metodología: la frecuencia que se utilice para definir los polinomios debe ser semejante a las frecuencias del sistema original (si se elige una frecuencia mucho mayor, esto provocará que el esfuerzo de control sea demasiado grande). Si el sistema original tiene polos muy alejados en frecuencia, es mejor dejarlos y aumentarles un poco la amortiguación. Lugar geométrico de las raíces simétrico Una técnica muy utilizada en la teoría de control óptimo, es la técnica del regulador cuadrático lineal óptimo (LQR en sus siglas en inglés). Una versión simplificada de dicha teoría que es de fácil aplicación es la siguiente: Planteo del problema: Buscar la ubicación de las raíces del sistema retroalimentado por variable de estado que minimice el siguiente funcional:
Ec. [13]
⋅±+⋅
⋅±+ 414.0626.0263.1424.0
00
js
js
ωω
⋅±+⋅
⋅±+⋅
+ 5359.05758.0292.13764.08955.0
000
js
jss
ωωω
+1
0ωs
⋅±+ 5.0866.0
0
js
ω
⋅±+⋅
+ 7112.07455.0942.0
00
jss
ωω
⋅±+⋅
⋅±+ 2711.09047.08302.06573.0
00
js
js
ωω
[ ] dtuzJ ⋅+⋅= ∫∞
0
22ρ

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
247
para el sistema:
Ec. [14] donde ρ balancea el efecto del error z con la acción de control u. Observar que z no necesariamente es y la salida del sistema. La variable z, debe escogerse como un error que se quiere minimizar en conjunto con la acción de control, y dicho error se puede calcular como una combinación lineal de los estados de la planta. Kailath (1980) demostró que los polos de lazo cerrado que minimizan J son las raíces estables de la ecuación:
Ec. [15] donde G0(s) es la función de transferencia de la entrada u del sistema al error z, que está definida como:
Ec. [16] La ecuación [15] es la que define el lugar de las raíces simétrico respecto al eje imaginario respecto del parámetro variable ρ. Entonces, para un dado ρ se encuentra la ubicación deseada de las raíces que cumplan con los requerimientos de la respuesta transitoria, y luego, por ejemplo, con Ackermann se determina el vector de ganancias de retroalimentación de estados K. Ejemplo: Se desea controlar una planta cuya ecuación de estado es la siguiente:
( ) ( ) 01 00 =−⋅⋅+ sGsGρ
( ) ( ) ( )( )sU
sZBAsCsG =⋅−⋅⋅= −1
10 I
uxa
x ⋅
−+⋅
=
•
1
0
0
102

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
248
donde el error que se quiere minimizar (en contraposición de la acción de control) es la suma de ambas variables de estado, por lo tanto:
Hallemos entonces la función de transferencia de u a z:
En matlab se puede hacer la comprobación aplicando el siguiente algoritmo: syms a, syms s; C1=[1 1]; I=[1 0; 0 1]; A=[0 1; a^2 0]; B=[0; -1]; Go=C1*inv(s*I-A)*B; Obteniendo el siguiente resultado: Go = s/(a^2 - s^2) + 1/(a^2 - s^2) En este último resultado se factoriza el menos del denominador y obtenemos el mismo resultado que nos dio matemáticamente. Por lo tanto, el lugar geométrico de las raíces al variar el parámetro ρ está dado por la siguiente ecuación característica:
Y por lo tanto el lugar geométrico de las raíces simétrico se muestra en la figura 140.
[ ] xz ⋅= 11
( ) ( ) [ ]
−⋅
−−
⋅=⋅−⋅⋅=−
−
1
0111I
1
2
110 sa
sBAsCsG
( ) [ ] ( )[ ]
( )( )
( )222222
2
0
1
111
1
0
1
11as
s
as
s
as
sa
s
sG−+−=
−
−−
⋅=
−⋅
−
⋅=
( )( )
( )( ) 0
111
2222=
−−⋅
−+⋅+
as
s
as
sρ

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Figura 140. Lugar geométrico de las raíces simétrico del ejemplo. Supongamos que se desea además de la posición de las raíces óptimo, también sea lo más rápido posible. Del lugar geométrico vemos que dicha posición es cuando ambas raíces se unen nuevamente en el eje real. Determinemos entonces ese punto, para eso veamos dónde la derivada con respecto a la variable compleja s de la inversa de la función transferencia se hace nula:
Y por lo tanto esta derivada se hace cero en
que nos interesa es la posición Utilizando el criterio de magnitud, podemos determinar el valor de
valor de a es: ):
Ahora, el polinomio característico deseado será:
Gds
d
( )−⋅=222 as
( )( ) ( )
((22
22
211
2s
ss
ass ⋅⋅−⋅+
−⋅⋅=
10 << a
( ) ( )−⋅= 1
00 sGsGs
ρ
( )( ) (2
22
212
22
a
a
−⋅−−
⋅−=
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
. Lugar geométrico de las raíces simétrico del ejemplo.
Supongamos que se desea además de la posición de las raíces óptimo, también sea lo más rápido posible. Del lugar geométrico vemos que dicha posición es cuando ambas raíces se unen nuevamente en el eje real. Determinemos
para eso veamos dónde la derivada con respecto a la variable de la inversa de la función transferencia se hace nula:
Y por lo tanto esta derivada se hace cero en s = , y . De ellas, la raíz doble
que nos interesa es la posición s = . Utilizando el criterio de magnitud, podemos determinar el valor de
Ahora, el polinomio característico deseado será:
( ) ( )( )
( ) ( ) =
−⋅+−=
−⋅ ss
as
ds
d
sGsG 11
1222
00
) ( ) ( ) ( ) ((( ) ( )−⋅+
−⋅−−−⋅+⋅⋅⋅22
222
11
112
ss
sassss
) ( ) ( )) (( ) (2
222
11
211
ss
assasss
−⋅+−⋅⋅=−−−⋅+
a± 22 a−±22 a−−
( )( ) ( ) =
+−⋅+−−
−−−
=−−= 1212
2
22
22
22
2 2 aa
aa
as
)( )( )
( )( ) (
2
22
2
22
2
2
141
14
12
22
1 a
a
a
a
a−⋅=
−−⋅=
−−⋅−=
+−
249
. Lugar geométrico de las raíces simétrico del ejemplo.
Supongamos que se desea además de la posición de las raíces que se cumpla un óptimo, también sea lo más rápido posible. Del lugar geométrico vemos que dicha posición es cuando ambas raíces se unen nuevamente en el eje real. Determinemos
para eso veamos dónde la derivada con respecto a la variable
. De ellas, la raíz doble
Utilizando el criterio de magnitud, podemos determinar el valor de ρ (suponiendo que el
=
) ( )) =−++ 11 s
))
( )222
2
2 ass
−+−⋅
)2a−

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
250
Que debe coincidir con la ecuación característica del sistema retroalimentado:
Igualando coeficiente con coeficiente:
Obteniendo así el vector de retroalimentación K:
Lección 5: DISEÑO DEL ESTIMADOR Y REGULADOR Diseño del estimador Normalmente en las plantas dinámicas que deseamos controlar no disponemos a cada instante de tiempo t con todas las variables de estados x para determinar la acción de control u = -K.x. Entonces, ¿cómo realizamos el control? La solución de este problema es mediante la construcción de un estimador (u observador indistintamente). Un observador se encarga en cada instante de tiempo t de “estimar” cuánto valen las variables de estado x en base de la salida de la planta y (medición) y la acción de control efectuada u. El resultado del observador lo llamaremos variable de estado estimada . Según el estimador determine el vector de variables de estado completo o solo un subconjunto del mismo, el estimador recibe el nombre de observador de orden completo u observador de orden reducido . Veamos a continuación la construcción de un observador de orden completo.
( ) ( ) 2222
2 2222 asasassc −+⋅−⋅+=−+=α
( ) [ ] =
−−−−
=
⋅
−+
−−
=⋅+−⋅21
2212
1det
1
01detIdet
kska
skk
sa
sKBAs
( )212
2 aksks +−⋅−=
22 22 ak −⋅=−
( ) 221 2 aak −=+−
[ ] [ ]221 222 akkK −⋅−−==
x̂

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
251
Estimador de orden completo Un estimador consiste en realizar una “simulación” del sistema para determinar el valor de las variables de estado estimadas . Una opción para armar el mismo, utilizando únicamente la información de la acción de control u, es mediante la siguiente ecuación:
[Ec. 17] ya que las matrices A y B son conocidas (ya que contamos con un modelo de la planta), y la acción de control u también puesto que es lo que nosotros determinamos y enviamos a la planta. El único problema con esto es que no conocemos la condición inicial de la que parte la planta real x(0), y así poner la misma a nuestra simulación. Analicemos con mayor detalle esto. La ecuación de estado de la planta real es:
[Ec. 18] con condición inicial x(0). Supongamos que nuestra simulación parta de otra
condición inicial que llamamos . Veamos entonces cómo evoluciona el error
, restando a la ecuación 18, la ecuación 17, obtenemos que:
[Ec. 19]
con condición inicial . Esto es un sistema autónomo, cuya dinámica corresponde a la de los autovalores de la matriz A. Entonces, salvo que fortuitamente las condiciones iniciales del vector de variables de estado coincidan con el estimado, el error evolucionará con un error que estará dado por los autovalores de A, o sea la dinámica de la planta a lazo abierto. Si la planta original es inestable, evidentemente esto no funcionará puesto que el error divergirá. Pero, además, siendo la planta original estable, este estimador tampoco tiene sentido, puesto que la ley de control la diseñamos generalmente para que el sistema responda más rápidamente que la planta original, y no podemos alimentar la ley de control con una estimación que tiene una dinámica igual a la de la planta. Entonces, ¿cómo resolvemos el problema? El problema lo resolvemos usando la regla habitual de control: “cuando tienes un problema, usa retroalimentación”. ¿y qué es lo que retroalimentamos? Disponemos de una información que no la hemos utilizado hasta el momento que es la información de la salida de la planta y, que comparándola con la salida que daría nuestra
x̂
uBxAx ⋅+⋅=•
ˆˆ
uBxAx ⋅+⋅=•
)0(x̂xxx ˆ~ −=
xAxxAuBxAuBxAxxx ~.)ˆ(ˆˆ~ =−⋅=⋅−⋅−⋅+⋅=−=•••
)0(ˆ)0()0(~ xxx −=

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
simulación lo utilizaremos para retroalimentar el estimador como muestra en línea punteada la siguiente figura:
Figura 141
Entonces la ecuación del observador será en este caso:
donde L es un vector columna de determinar. Este vector L de manera conveniente. Calculemos ahora cómo converge el error de estimación. Restando a la ecuación 18 de la planta, la ecuación 20, obtenemos:
Por lo tanto, si no hay error dinámica que estará dada por la ecuación característica:
x̂•
ˆ~ BxAxxx ⋅+⋅=−=•••
CLAx )(~ ⋅⋅−=•
(det( −⋅ As I
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
simulación lo utilizaremos para retroalimentar el estimador como muestra en línea nte figura:
Figura 141. Esquema del estimador con retroalimentación.
Entonces la ecuación del observador será en este caso:
[Ec. 20]
es un vector columna de n componentes de ganancias proporcionales a se elegirá de manera tal que el error de estimación converja
mo converge el error de estimación. Restando a la ecuación 18 de la planta, la ecuación 20, obtenemos:
[Ec. 21]
Por lo tanto, si no hay error de modelado, el error de estimación convergerá con unadinámica que estará dada por la ecuación característica:
[Ec. 22]
)ˆ(ˆ xCyLuBxA ⋅−⋅+⋅+⋅=
)̂()̂(ˆ xxAxCyLuBxAuB −−⋅=⋅−⋅−⋅−⋅−⋅
x~⋅
0)) =⋅− CL
252
simulación lo utilizaremos para retroalimentar el estimador como muestra en línea
. Esquema del estimador con retroalimentación.
[Ec. 20]
componentes de ganancias proporcionales a se elegirá de manera tal que el error de estimación converja
mo converge el error de estimación. Restando a la ecuación 18
de modelado, el error de estimación convergerá con una
)̂( xxCL −⋅⋅−

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
253
En la práctica, se puede comprobar que aun habiendo pequeños errores en el modelado, se pueden conseguir errores pequeños de estimación dada una adecuada elección del vector L. Por lo tanto, eligiendo la posición de n polos que definirán la dinámica de convergencia del error de estimación, podemos determinar el valor de las n componentes del vector L (es un problema de nxn). El problema es similar al de determinación del vector K para la ley de control. Entonces teniendo la ecuación característica deseada del estimador:
[Ec. 23] donde βi son las ubicaciones deseadas de los polos del estimador. Igualando coeficiente a coeficiente con la ecuación 22 determinamos los valores de los componentes del vector L. En este problema, siempre podemos determinar todos los componentes de L, si el sistema es observable (capacidad que tiene el sistema de observar todos los modos del sistema basándose en la medición y). Recordamos que la planta es observable, si y solo si, la matriz de observabilidad O:
[Ec. 24] es de rango completo. También podemos aplicar la fórmula de Ackerman para resolver este problema, ya que los autovalores de una matriz son los mismos que los autovalores de la matriz traspuesta. Observando las matrices, en la fórmula de Ackerman hay que reemplazar la matriz A por su traspuesta, la matriz B por la matriz C traspuesta, y el vector K por el vector L traspuesto. Notar que de esta manera, la matriz que hay que invertir es la matriz de observabilidad traspuesta. Ejemplo: Sigamos con el ejemplo del oscilador no-amortiguado, cuya representación por variables de estado volvemos a describir:
0)(...)()()( 21 =−⋅⋅−⋅−= ne ssss βββα
⋅
⋅⋅
=
− )1(
2
:nAC
AC
AC
C
OOOO

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
254
Elijamos como polos del estimador un polo doble en s = -10ω0. Por lo tanto la ecuación característica deseada será:
Y sabemos que la ecuación característica del estimador deberá ser:
Igualando coeficiente a coeficiente, obtenemos el siguiente resultado:
Por lo tanto la ecuación del observador será:
Observar que para la ley de control habíamos ubicado sus polos en s = -2.ω0, o sea que duplicamos la frecuencia natural de la planta y pasamos de tener un coeficiente de amortiguamiento igual a 0 (no existe amortiguamiento), a otro con lazo de
ux
x
x
x ⋅
+
⋅
−=
•
•
1
0
0
10
2
120
2
1
ω
[ ]
⋅=
2
101x
xy
200
200 10020)10()10( ωωωωα ⋅+⋅⋅+=⋅+⋅⋅+= sssse
[ ] =
⋅
+
−−
=⋅+−⋅ 01
0
10
0
0det)det(
2
120 l
l
s
sCLAs
ωI
2021
2
220
1 1det ω
ω++⋅+=
+−+
= lslssl
ls
[ ] )ˆ01(99
20
1
0ˆ
0
10ˆ
20
020
xyuxx ⋅−⋅
⋅⋅
+⋅
+⋅
−=
•
ωω
ω

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
255
retroalimentación de estados cuyo coeficiente de amortiguamiento es 1 (completamente amortiguado). Notar que los polos del estimador los ubicamos a una distancia 5 veces mayor que los polos de la ley de control (son polos 5 veces más rápidos). Veremos más adelante que ésta es una buena elección. Estimador de orden reducido Si la salida del sistema es ya una de las variables de estado (si no lo es, se podría realizar una transformación de estado para que esto sí ocurriera), y además esta medición no es ruidosa, es completamente innecesario realizar una estimación de dicha variable. Si la señal de medición es ruidosa el observador de orden completo actuaría como filtro de dicha variable. Entonces, en el caso que la medición no es ruidosa es conveniente construir un estimador de dimensión menor que solo estime los estados no medidos. Para eso dividamos el vector de variables de estado en: xa los estados medidos; y xb los estados no-medidos (que son los que deseamos estimar):
Por lo tanto la representación por variables de estado podrá ser escrita como:
[Ec. 25a]
[Ec. 25b] Entonces la dinámica de las variables de estado no medidas es:
[Ec. 26] y la dinámica de las variables de estado medidas (si hablamos de sistemas SISO es una sola variable):
=
b
a
x
xx
uB
B
x
x
AA
AA
x
x
b
a
b
a
bbba
abaa
b
a ⋅
+
⋅
=
•
•
[ ]
⋅=
b
a
x
xy 0I
44 344 21ENTRADACONOCIDO
bababbbb uBxAxAx⇒
•⋅+⋅+⋅=
uBxAxAx ababaaaa ⋅+⋅+⋅=•

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
256
[Ec. 27] Por lo tanto la ecuación 26 juega el papel de las ecuaciones de estado, y la ecuación 27 la ecuación de salida, permitiendo realizar el siguiente paralelismo con el observador de orden completo:
O. orden completo O. orden reducido
x xb
A Abb
B.u Aba.y+Bb.u
y
C Aab
Con este paralelismo, armamos la ecuación del estimador:
[Ec. 28] Definiendo ahora el error de estimación de las variables de estado no-medidas como:
[Ec. 29] Usando la ecuación 26, 27, 28 y 29, obtenemos cómo es la ecuación de la dinámica de éste error:
[Ec. 30]
bab
SALIDACONOCIDO
aaaaa xAuBxAx ⋅=⋅−⋅−⇒
•
444 3444 21
uByAy aaa ⋅−⋅−•
)ˆ()(ˆˆ bab
SALIDA
aaa
ENTRADA
bbabbbb xAuByAyLuByAxAx ⋅−⋅−⋅−⋅+⋅+⋅+⋅=••
444 3444 2144 344 21
bbb xxx ˆ~ −=

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
257
Y por lo tanto la ecuación característica que define los polos del estimador será:
[Ec. 31] Que igualando coeficiente a coeficiente con la ecuación característica deseada determinamos los componentes del vector L. Notar que ahora L será un vector columna de la misma dimensión de xb (llamemos nb), y que el determinante de la ecuación 31 es de una matriz de nbxnb; por lo tanto ahora debemos elegir solamente la posición de nb polos. La ecuación 28 del estimador puede ser reescrita como:
[Ec. 32] La presencia de la derivada temporal de la medición representa una dificultad, puesto que a pesar que la señal como dijimos previamente no es ruidosa, el poco ruido que tenga por el uso de su derivada se verá amplificado. Entonces, para la implementación de este observador es conveniente utilizar una variable auxiliar
; e integro numéricamente con la siguiente ecuación:
[Ec. 33] y determino la estimación como:
[Ec. 34] Las ecuaciones 33 y 34 son entonces en conjunto las ecuaciones del observador de orden reducido; donde la ecuación 33 juega el papel de la ecuación de estado (con dos entradas: u e y), y la ecuación 34 la ecuación de salida (notar que hay
transmisión directa de y –una de las entradas– a la salida ).
0))(det( =⋅−−⋅ abbb ALAs I
••⋅+⋅⋅−+⋅⋅−+⋅⋅−= yLyALAuBLBxALAx aabaabbabbbb )()(ˆ)(ˆ
yLxx bc ⋅−= ˆ
yALAuBLByLxALAx aabaabcabbbc ⋅⋅−+⋅⋅−+⋅+⋅⋅−=•
)()()()(
yLxx cb ⋅+=ˆ
bx̂

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
258
Ejemplo: Volviendo al ejemplo del oscilador no-amortiguado, analizando las matrices tenemos que:
La ecuación característica será entonces:
Elijo la ubicación del único polo del estimador en s = -10.ω0, por lo tanto la ecuación característica deseada será:
Por lo tanto, de la comparación de ambas ecuaciones determinamos que L = 10.ω0. La ecuaciones del estimador serán entonces:
Selección de los polos del estimador Las reglas son similares que las utilizadas para la selección de los polos de la ley de control. Generalmente los polos del estimador se eligen entre 2 a 6 veces más rápidos que los de la ley de control, así los polos de la ley de control quedan dominantes (polos más cercano al origen en el plano s). En caso que la medición sea muy ruidosa, debemos tratar que el vector de ganancias L sea de magnitudes pequeñas (confiar más en el modelo que en la medición), y esto resultará en polos del estimador que son más lentos y por lo tanto influirán más significativamente en la respuesta transitoria del sistema retroalimentado. En este
=−===0
1020 bbba
abaa
AA
AA
ω
==
1
0
b
a
B
B
)()0det()det( LsLsALAs abaa +=+−=⋅+−⋅ I
010)( ωα ⋅+= sse

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
259
caso, habrá que tomar un compromiso entre la reducción del ruido de la medición y la respuesta transitoria más lenta. Aunque en el estimador no exista el problema de “demasiado esfuerzo para el actuador” (en un principio, en el comienzo de los computadores el límite estaba en la precisión que éstos podían manejar, pero con la máquinas que existen hoy en día ese ya no es un límite), el hacerlo demasiado rápido trae como consecuencia una menor capacidad de filtrado de ruido. El equilibrio entre filtrado de ruido y la rapidez de los polos del estimador se puede optimizar. Supongamos tener un observador de orden completo, cuyas ecuaciones reiteramos acá:
[Ec. 35] con el cual tratamos de estimar los estados de una planta que posee tanto perturbaciones en el modelo (w), como en la medición (v):
[Ec. 36.a]
[Ec. 36.b] Como podemos observar de las ecuaciones, cuando tengo un L que es pequeño en magnitud, nos estamos apoyando más en el modelo y B1.w debería ser más pequeño que el ruido de medición v. Haciendo un razonamiento similar, cuando tengo un L grande, nos estamos apoyando más en la medición que en el modelo, y por lo tanto debería tener un ruido en la medición v que sea pequeño, sin importarme mucho cuán grande sea la perturbación en el modelo w. La solución óptima a esto es el lugar geométrico simétrico de las raíces dado por la ecuación:
[Ec. 37] donde q es el parámetro que varía en el lugar geométrico de las raíces y que es proporcional a la relación entre las varianzas (el cuadrado de la desviación standard) del
ruido de medición v y de la perturbación del modelo w: . Mientras que la función de transferencia Ge(s), es la función de transferencia desde la
perturbación w al ruido de la medición:
)ˆ(ˆˆ xCyLuBxAx ⋅−⋅+⋅+⋅=•
wBuBxAx ⋅+⋅+⋅=•
1
vxCy +⋅=
0)()(1 =−⋅⋅+ sGsGq ee
( )( )w
vq
2
2
σσ=

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
260
[Ec. 38] En función de cuanto valga la relación de las varianzas de ambas señales ruidosas, es que obtenemos la mejor opción para la ubicación de polos del estimador. Ellas serán las ubicaciones de las raíces estables del lugar geométrico simétrico de las raíces mencionadas. Diseño del regulador Combinemos ahora los resultados de haber diseñado la ley de control y el estimador. Por simplificación vamos a suponer que el observador que fue diseñado sea un estimador de orden completo, pero resultados similares a los que llegaremos se obtienen utilizando un observador de orden reducido. Como se podrá observar, en este caso si la planta original es de orden n, cuando realizamos la retroalimentación de estados con un observador de orden completo, el sistema retroalimentado es un sistema de orden 2.n. Por lo tanto debemos describir al sistema eligiendo ahora 2.n variables de estado. Elijamos como las n primeras variables de estado a las variables de estado de la planta original: x, y las restantes n
variables los errores de estimación: . Empecemos a determinar las ecuaciones de estado del sistema extendido. De las ecuaciones de estado de la planta tenemos:
[Ec. 39] Por otro lado, del estimador sabemos que el error de estimación responde a la siguiente dinámica:
[Ec. 40]
Y por lo tanto ya tenemos la descripción completa:
[Ec. 41]
11)(
)(
)()( BAsC
sW
sVsGe ⋅−⋅⋅−== −I
xxx ˆ~ −=
)~(ˆ xxKBxAxKBxAx −⋅⋅−⋅=⋅⋅−⋅=•
xKBxKBAx ~)( ⋅⋅+⋅⋅−=•
xCLAx ~)(~ ⋅⋅−=•
⋅
⋅−⋅⋅−
=
•
•
x
x
CLA
KBKBA
x
x~)(0
)(
~

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Donde ahora este sistema descriecuación característica es:
Y se puede demostrar matemáticamente que dicho determinante es:
[Ec. 43] Por lo tanto concluimosretroalimentado tiene como autovalores (como polos), los polos de la ley de control en conjunto con los polos del estimador.Ahora bien, nunca nos preguntamos con la parte que armamos del compensador, cómo era su función de transferencia. Veamosretroalimentado:
Figura 142. Esquema del sistema retroalimentado con el regulador. Toda la parte recuadrada en línea punteada es lo que “armamos” para realizar el control, a la cual entra la señal acción de control. Las ecuaciones del compensador serán:
det
−−⋅
(As I
det( +−⋅ BAs I
⋅−=+⋅=
•
ˆ
ˆˆ
xKu
BxAx
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
este sistema descrito por la ecuación 41 es un sistema autónomo, cuya ecuación característica es:
Y se puede demostrar matemáticamente que dicho determinante es:
concluimos con algo que esperábamos que sucediera: retroalimentado tiene como autovalores (como polos), los polos de la ley de control en conjunto con los polos del estimador. Ahora bien, nunca nos preguntamos con la parte que armamos del compensador, cómo era su función de transferencia. Veamos cómo
. Esquema del sistema retroalimentado con el regulador.
Toda la parte recuadrada en línea punteada es lo que “armamos” para realizar el control, a la cual entra la señal y de medición, y sale determinado cuánto vale la acción de control. Las ecuaciones del compensador serán:
[Ec. 44]
0)(0
=
⋅−⋅⋅−
CLA
KBK)B
)det() =⋅+−⋅⋅⋅ CLAsKB cαI
⋅−⋅+⋅
)ˆ( xCyLu
261
to por la ecuación 41 es un sistema autónomo, cuya
[Ec. 42]
Y se puede demostrar matemáticamente que dicho determinante es:
con algo que esperábamos que sucediera: el sistema retroalimentado tiene como autovalores (como polos), los polos de la ley de control
Ahora bien, nunca nos preguntamos con la parte que armamos del compensador, queda el sistema
. Esquema del sistema retroalimentado con el regulador.
Toda la parte recuadrada en línea punteada es lo que “armamos” para realizar el de medición, y sale determinado cuánto vale la
[Ec. 44]
0)()( =⋅ ss ec α

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
262
Reacomodando los términos:
[Ec. 45]
Y por lo tanto la ecuación de transferencia del compensador será:
[Ec. 46]
Que tendrá por polos las raíces de la ecuación característica:
[Ec. 47] Cuyos valores nunca antes habían sido calculados. Notar que dichas raíces pueden ser inestables, y por lo tanto la función de transferencia del compensador será inestable y esto no puede ser posible porque originaría acciones de control divergentes (que no es deseado puesto que, o alcanzaríamos siempre alguna saturación en la acción de control, o quemaríamos el actuador: por ejemplo un motor). Entonces este cálculo es siempre una cosa a tener en cuenta para verificar el controlador construido. Queda como ejercicio para el lector el desarrollo de estas cuentas para el caso de un observador de orden reducido. Ejemplo: Sea la planta con la siguiente función de transferencia:
Que en su forma canónica de observabilidad queda representado por variable de estado de la siguiente manera:
⋅−=⋅+⋅⋅−⋅−=
•
ˆ
ˆ)(ˆ
xKu
yLxCLKBAx
LCLKBAsKsGComp ⋅⋅+⋅+−⋅⋅−= −1)()( I
0)det( =⋅+⋅+−⋅ CLKBAs I
)8()2(
10)(
+⋅+⋅=
ssssG

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
263
Determinamos primeramente el vector K de retroalimentación de estados. Para eso utilizamos el criterio ITAE, polinomio de tercer orden, con una frecuencia ω0 = 2 rad/seg. Esto significa que los polos de la ley de control los ubicamos en s = -1.42, y s = -1.04±2.14j; y la ecuación característica deseada será:
Con el mismo llegamos a obtener el vector de retroalimentación de estados:
Realicemos un estimador de orden completo, y utilicemos también el criterio ITAE con un ω0 = 6 rad/seg. Entonces los polos del estimador estarán en s = -4.25, y s = -3.13±6.41j; y la ecuación característica deseada será:
Y así llegamos al vector de ganancias para el estimador:
Determinemos ahora la función de transferencia del compensador, que resulta en:
Que como vemos tiene un polo inestable, y por lo tanto no es posible implementarlo puesto que generaría una acción de control divergente.
[ ]
⋅=
⋅
+⋅
−−
=•
00110
0
0
000
1016
0110
xy
uxx
04.8615.85.3)( 23 +⋅+⋅+= sssscα
[ ]65.07615.5411.46 −−=K
26.21649.7751.10)( 23 +⋅+⋅+= sssscα
=26.216
49.61
51.0
L
)317.8943.2()876.1(
)1.2()432.0(190)()( 1
jss
ssLCLKBAsKsGComp ⋅±+⋅−
+⋅+⋅−=⋅⋅+⋅+−⋅⋅−= −I

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Seguimiento a referencia Hasta ahora lo que hemos llegado a realizar del control nos sirve como regulador: mantener la planta en el punto de operación y no moverlo de ese punto. Este regulador también cumple la función de rechazar perturbaciones, esto cambio de una entrada no controlada (una perturbación), lograr mantener el sistema en el punto de operación mencionado.El seguimiento a referencia es un problema distinto al de regulación, ya que supone la existencia de una señal de referencia(o de servomecanismo) consiste en que la señal de salida evolución temporal de esta señal de referencia Entonces el problema consiste en ver cómo introducimos en el diseñado hasta ahora, la señal de referencia Las ecuaciones que hemos desarrollado hasta ahora son las siguientes:
Planta:
Regulador:
Existen dos maneras evidentes de referencia (que no son las únicas, veremos que existen más). Esas dos formas son las que muestran las siguientes figuras:
Figura 143.
⋅=⋅+⋅=
•
xCy
BxAx
⋅−=−⋅−=
•
ˆ
(ˆ
xKu
KGAx
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
Seguimiento a referencia
Hasta ahora lo que hemos llegado a realizar del control nos sirve como regulador: mantener la planta en el punto de operación y no moverlo de ese punto. Este regulador también cumple la función de rechazar perturbaciones, esto cambio de una entrada no controlada (una perturbación), lograr mantener el sistema en el punto de operación mencionado. El seguimiento a referencia es un problema distinto al de regulación, ya que supone la existencia de una señal de referencia r. El problema de seguimiento de referencia (o de servomecanismo) consiste en que la señal de salida evolución temporal de esta señal de referencia r (señal deseada para Entonces el problema consiste en ver cómo introducimos en el esquema de control diseñado hasta ahora, la señal de referencia r de modo que y trate de seguirla.
Las ecuaciones que hemos desarrollado hasta ahora son las siguientes:
[Ec. 48]
[Ec. 49]
Existen dos maneras evidentes de introducir en el esquema de control la entrada de referencia (que no son las únicas, veremos que existen más). Esas dos formas son las que muestran las siguientes figuras:
. CASO A: Compensación en la retroalimentación.
⋅
u
⋅+⋅⋅−
ˆ) yLxCL
264
Hasta ahora lo que hemos llegado a realizar del control nos sirve como regulador: mantener la planta en el punto de operación y no moverlo de ese punto. Este regulador también cumple la función de rechazar perturbaciones, esto es, ante el cambio de una entrada no controlada (una perturbación), lograr mantener el sistema
El seguimiento a referencia es un problema distinto al de regulación, ya que supone . El problema de seguimiento de referencia
(o de servomecanismo) consiste en que la señal de salida “y” siga (copie) la (señal deseada para y).
esquema de control trate de seguirla.
Las ecuaciones que hemos desarrollado hasta ahora son las siguientes:
introducir en el esquema de control la entrada de referencia (que no son las únicas, veremos que existen más). Esas dos formas son
: Compensación en la retroalimentación.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Figura 144 Como se puede observar, ambos esquemas de control presentan los mismos polos de lazo cerrado (haciendo regulador), pero no tienen los mismos ceros y por lo tanto la respseguimiento de r serán distintos:CASO A : Un escalón en la entrada de referencia en este esquema excita de igual modo el estimador como a la planta, y por lo tanto no habrá un cambio en el error de estimación por la presencia de este escalón en la referencia. Esto significa que la función de transferencia de estimador, así la respuesta del sistema así retroalimentado y con esta entrada de referencia tendrá como polos solo los polos de la ley de control, o sea las raíces de la
ecuación característica: CASO B : Un escalón en la entrada de referencia en este esquema excita al estimador (aparece un error de estimación) que se atenúa con la dinámica propia del estimador. Esto significa que las raíces tanto de la ley de control como las del estimador son excitadas
ecuación característica: Es evidente después de este análisis que es más conveniente utilizar el esquema del caso A. Veamos ahora, la forma más general de introducir la señal de referencia regulador es sumando términos proporcionales a las ecuaciones del regulador:
donde M es un vector columna de es un escalar (considerando un sistema SISO).
De esta manera: • No se afecta la estabilidad del sistema retroalimentado porque
señal externa (los polos de lazo cerrado son los de la ley de control conjuntamente con los del estimador).
• Se afecta la respuesta transitoria. Dependiendo de donde se coloquen losceros de la función de transferencia de cambiaremos el comportamiento de la respuesta transitoria de
det(
det(
−==
•(ˆ
Ku
Ax
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
Figura 144. CASO B: Compensación en el lazo directo.
Como se puede observar, ambos esquemas de control presentan los mismos polos de lazo cerrado (haciendo r = 0, ambos esquemas tienen los mismos polos que el regulador), pero no tienen los mismos ceros y por lo tanto la resp
serán distintos: : Un escalón en la entrada de referencia en este esquema excita de igual
modo el estimador como a la planta, y por lo tanto no habrá un cambio en el error de estimación por la presencia de este escalón en la referencia. Esto significa que la
nsferencia de r a y debe tener ceros que cancelen los polos del estimador, así la respuesta del sistema así retroalimentado y con esta entrada de referencia tendrá como polos solo los polos de la ley de control, o sea las raíces de la
. : Un escalón en la entrada de referencia en este esquema excita al
estimador (aparece un error de estimación) que se atenúa con la dinámica propia del estimador. Esto significa que las raíces tanto de la ley de control como las del estimador son excitadas en forma conjunta, o sea los polos serán las raíces de la
.
Es evidente después de este análisis que es más conveniente utilizar el esquema del
Veamos ahora, la forma más general de introducir la señal de referencia regulador es sumando términos proporcionales a las ecuaciones del regulador:
[Ec. 50]
es un vector columna de n componentes (n = es el orden del estimador), y es un escalar (considerando un sistema SISO).
No se afecta la estabilidad del sistema retroalimentado porque señal externa (los polos de lazo cerrado son los de la ley de control conjuntamente con los del estimador). Se afecta la respuesta transitoria. Dependiendo de donde se coloquen losceros de la función de transferencia de r a y, según los valores de cambiaremos el comportamiento de la respuesta transitoria de
0)det( =⋅+−⋅ KBAs I
0)det()det( =⋅+−⋅⋅⋅+−⋅ CLAsKBAs II
⋅+⋅⋅+⋅+⋅⋅−⋅− ˆ
ˆ)
rNxK
rMyLxCLKBA
265
Compensación en el lazo directo.
Como se puede observar, ambos esquemas de control presentan los mismos polos = 0, ambos esquemas tienen los mismos polos que el
regulador), pero no tienen los mismos ceros y por lo tanto la respuesta en el
: Un escalón en la entrada de referencia en este esquema excita de igual modo el estimador como a la planta, y por lo tanto no habrá un cambio en el error de estimación por la presencia de este escalón en la referencia. Esto significa que la
debe tener ceros que cancelen los polos del estimador, así la respuesta del sistema así retroalimentado y con esta entrada de referencia tendrá como polos solo los polos de la ley de control, o sea las raíces de la
: Un escalón en la entrada de referencia en este esquema excita al estimador (aparece un error de estimación) que se atenúa con la dinámica propia del estimador. Esto significa que las raíces tanto de la ley de control como las del
en forma conjunta, o sea los polos serán las raíces de la
Es evidente después de este análisis que es más conveniente utilizar el esquema del
Veamos ahora, la forma más general de introducir la señal de referencia r(t) en el regulador es sumando términos proporcionales a las ecuaciones del regulador:
[Ec. 50]
= es el orden del estimador), y N
No se afecta la estabilidad del sistema retroalimentado porque r(t) es una señal externa (los polos de lazo cerrado son los de la ley de control
Se afecta la respuesta transitoria. Dependiendo de donde se coloquen los , según los valores de M y N,
cambiaremos el comportamiento de la respuesta transitoria de y.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
266
Existen varias posibilidades para elegir los valores de M y N: 1) Que el error de estimación sea independiente de r(t). 2) Que el control esté basado directamente en la comparación entre r e y, o
sea esté basado en e = r – y. 3) Máxima libertad para ajustar la respuesta transitoria y estacionaria del
sistema retroalimentado. Para el caso 1: Analicemos cómo es la dinámica del error de estimación:
[Ec. 51] Por lo tanto, para que los cambios en el error de estimación no sean afectados por la señal r, M deberá ser igual a: M = B.N. De esta manera, la ecuación 50 queda:
[Ec. 52] Notar que este es el caso A mencionado anteriormente. Observar que si el actuador de la planta posee una saturación, conviene indicar también dicha saturación al estimador, así la saturación no afectará tampoco al error de estimación . Queda todavía cómo determinar el valor de N, pero esto lo dejamos para más adelante, después de haber visto todos los casos. Para el caso 2: Esta es la única alternativa que disponemos cuando no se dispone de las señales r e y por separado, sino que se dispone solamente de la diferencia entre ambos. Ejemplo de esto es por ejemplo el termostato en el control de temperatura de un ambiente.
En este caso, eligiendo N = 0; y M = -L, conseguimos el objetivo:
[Ec.53]
x~
rMyLxCLKBArNxKBxAxxx ⋅−⋅−⋅⋅−⋅−−⋅+⋅−⋅+⋅=−=•••
ˆ)()ˆ(ˆ~
rMrNBxCLAx ⋅−⋅⋅+⋅⋅−=• ~)(~
⋅+⋅−=⋅+⋅+⋅⋅−=⋅⋅+⋅+⋅⋅−⋅−=
•
ˆ
ˆ)(ˆ)(ˆ
rNxKu
uByLxCLArNByLxCLKBAx
x~
⋅−=⋅+⋅−=−⋅+⋅⋅−⋅−=⋅−⋅+⋅⋅−⋅−=
•
ˆ0ˆ
)(ˆ)(ˆ)(ˆ
xKrxKu
ryLxCLKBArLyLxCLKBAx

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
267
y como vemos las ecuaciones ahora solo dependen de e = y – r. Notar que éste es el caso B mencionado previamente. Para el caso 3: Para este caso, analicemos previamente que sucede con los ceros de transmisión de r a y, para el caso de no tener estimador. En este caso la acción de control u toma el valor: u = -K . x + N . r [Ec. 54] y por lo tanto las ecuaciones que gobiernan el sistema retroalimentado serán:
[Ec. 55] Los ceros de la transmisión de r a y están dados por aquellos lugares del plano s que cumplen la siguiente ecuación:
[Ec. 56] Estas raíces son las mismas, si a una columna de la matriz la multiplicamos por una constante y se la sumamos a las otras columnas. Multipliquemos a la última columna por ki/N y sumemos a cada una de las i columnas (i de 1 a n). Entonces las raíces de la ecuación 56 son las mismas que las raíces de la siguiente ecuación:
[Ec. 57] Por lo tanto los ceros de transmisión de r a y no dependen del valor de K. Además podemos observar que estos ceros son los mismos ceros originales de la planta (son los ceros de u a y). Analicemos ahora el caso de tener un estimador. Los ceros que hay de r a y serán los ceros que hay entre r y u, más los ceros de u a y. Como por el análisis anterior sabemos que los ceros de u a y son los originales de la planta, nos queda por determinar si existe algún otro cero que se agregue en la transmisión de r a u(*). Para analizar esto, planteemos las ecuaciones del estimador/control:
⋅=⋅⋅+⋅⋅−=
•
)(
xCy
rNBxKBAx
00
det =
⋅−⋅+−⋅C
NBKBAs I
00
det =
−−⋅C
BAs I

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
268
[Ec. 58] (*) Otra manera de pensar esto: que exista un cero en la transmisión de r a u significa que para ese modo de excitación en r no tenemos ningún “movimiento” en u, esto implica que como u no se mueve, tampoco se moverá y. Entonces ese modo en r no “mueve” a la señal y y por lo tanto es un cero también de transmisión de r a y (la salvedad está cuando justo coincide con un polo de u a y, que en dicho caso se cancelarían). Veamos entonces los ceros que existen de r a u. Éstos serán las raíces del siguiente determinante:
[Ec. 59] Conclusión: Tenemos n grados de libertad (n elementos del vector M/N), para asignar la posición de n ceros de transmisión de r a u (y por lo tanto de r a y), que son las raíces de γ(s). Consideraciones: • Para la respuesta dinámica, los ceros influyen en forma significativa en la respuesta transitoria a un escalón y por lo tanto generalmente se requerirá que los ceros se encuentren alejados 4 veces más que los polos dominantes del sistema, salvo que se quiera eliminar algún polo (estable) indeseable cancelándolo con uno de estos ceros. • Para la respuesta estática (o estacionaria), existe una relación entre la ubicación de polos y ceros de lazo cerrado con la precisión con que se sigue a una señal de referencia. Ejemplo de ello está la relación de Truxal para sistemas de tipo I, en donde el error de estado estacionario a una rampa es:
[Ec. 60] donde pi son la posición de los polos de lazo cerrado y zj son los ceros de los polos de lazo cerrado (con sus signos).
⋅+⋅−=⋅+⋅+⋅⋅−⋅−=
•
ˆ
ˆ)(ˆ
rNxKu
rMyLxCLKBAx
0)(γ)det(s
0det
==⋅−⋅+⋅+−⋅
⇓
=
−−⋅+⋅+−⋅
sKN
MCLKBA
NK
MCLKBAs
I
I
∑∑ −==ijv
ssrampa pzKe
111

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
269
Criterio de cómo utilizar esto: Si existen un par de cero/polo en la cual (pi – zj) es muy pequeño (y por lo tanto la influencia de este par sobre la respuesta transitoria es despreciable), pero además hacemos que (1/pi – 1/zj) sea considerablemente grande, podemos influir bastante en la constante de error estacionario sin afectar la parte transitoria. Se puede comprobar también que para sistema de tipo II, el error de estado estacionario a una parábola vale la siguiente relación:
[Ec. 61] donde nuevamente las variables que definen la relación tienen el mismo significado que para la ecuación [60]. La demostración de esta fórmula se encuentra descripta aquí. Observación:
De , tenemos:
a) Para el caso 1: , cuyas raíces son los polos del estimador. Por lo tanto los ceros de transmisión de r a u se cancelan con los polos del estimador, confirmando resultados anteriores.
b) Para el caso 2: , y reemplazando en la ecuación 59 tenemos:
[Ec. 62] Posmultiplicando la última columna por C y sumándole a las n primeras columnas, y
premultiplicando la última fila por B y sumándole a las primeras n filas, obtenemos:
[Ec. 63]
Por lo tanto, mirando esta última ecuación, los ceros que agrega el compensador están fijados por L y K, y no hay manera de ubicarlos en otro lugar (notar que los ceros que quedan son los ceros de haber tomado las ecuaciones originales de la planta, y haber reemplazado el vector columna de entrada B por L y el vector fila de salida C por K).
Resumen:
−⋅== ∑∑ 22
11
2
11
ijassparabola
pzKe
0)(γ)det(s ==⋅−⋅+⋅+−⋅ sKN
MCLKBAI
0)det()(γ =⋅+−⋅=⇒= CLAssBN
MI
0, =−= NLM
00
det)(γ =
−⋅+⋅+−⋅
=K
LCLKBAss
I
00
det)(γ =
−−⋅
=K
LAss
I

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
La función de transferencia total de lazo cerrado será:
donde b(s) es el polinomio cuyas raíces definen los ceros de la planta (ceros de lazo abierto, que no se mueven); deseadas que se utilizaron para la ley de control y el estimador respectivamente; y finalmente γ(s) son los ceros elegidos por el diseñador de la entrada a referencia.
Elección de la ganancia
Ahora es el tiempo de determinar la ganancia de M. El objetivo de esta elección es ajustar la ganancia estacionaria final dentre r e y de manera que la misma sea unitaria .
a) Si elegimos el primer método, por el análisis que hemos hecho los estados estimados estacionarios son iguales a los estados reales estacionarios (puesto que el
error de estimación tiende a cero). Por lo tanto podemos suponer que esta manera evitar complicarme con las cuentas del compensador.
Supongamos que ya en el estacionario, tanto la señal sean proporcionales a la señal de entrada sabemos que por las ecuaciones de la (ya que de tratarse de un estacionario las derivadas temporales deben ser nulas):
Como en el estacionario queremos lograr que de ecuaciones para determinar
Eliminando rss de las ecuaciones, y reescribiendo en forma matricial:
G
ssr
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
La función de transferencia total de lazo cerrado será:
[Ec.64]
) es el polinomio cuyas raíces definen los ceros de la planta (ceros de lazo abierto, que no se mueven); αc(s) y αe(s) son las ecuaciones características deseadas que se utilizaron para la ley de control y el estimador respectivamente; y
son los ceros elegidos por el diseñador de la entrada a referencia.
Elección de la ganancia :
Ahora es el tiempo de determinar la ganancia para los tres métodos de selección . El objetivo de esta elección es ajustar la ganancia estacionaria final d
de manera que la misma sea unitaria . a) Si elegimos el primer método, por el análisis que hemos hecho los estados
estimados estacionarios son iguales a los estados reales estacionarios (puesto que el
error de estimación tiende a cero). Por lo tanto podemos suponer que ar complicarme con las cuentas del compensador.
Supongamos que ya en el estacionario, tanto la señal uss como los estados sean proporcionales a la señal de entrada r: uss = Nu . r ; xss = sabemos que por las ecuaciones de la planta, en el estacionario debe cumplirse que (ya que de tratarse de un estacionario las derivadas temporales deben ser nulas):
[Ec. 65]
Como en el estacionario queremos lograr que yss = rss, tenemos el siguiente conjunto de ecuaciones para determinar Nx y Nu:
[Ec. 66]
de las ecuaciones, y reescribiendo en forma matricial:
[Ec. 67]
)()(
)()(γ)(
c
*
ss
sbsKsG
eαα ⋅⋅⋅=
N
N
ssssss
ssss
uDxCy
uBxA
⋅+⋅=⋅+⋅=0
ssussss
ssuss
rNDrC
rNBrA
⋅⋅+⋅⋅=⋅⋅+⋅⋅=
x
x
N
N0
=
⋅
1
0
uNDC
BA xN
270
[Ec.64]
) es el polinomio cuyas raíces definen los ceros de la planta (ceros de lazo ) son las ecuaciones características
deseadas que se utilizaron para la ley de control y el estimador respectivamente; y son los ceros elegidos por el diseñador de la entrada a referencia.
para los tres métodos de selección . El objetivo de esta elección es ajustar la ganancia estacionaria final del sistema
a) Si elegimos el primer método, por el análisis que hemos hecho los estados estimados estacionarios son iguales a los estados reales estacionarios (puesto que el
error de estimación tiende a cero). Por lo tanto podemos suponer que , y de ar complicarme con las cuentas del compensador.
como los estados xss = Nx . r. Por otro lado
planta, en el estacionario debe cumplirse que (ya que de tratarse de un estacionario las derivadas temporales deben ser nulas):
, tenemos el siguiente conjunto
[Ec. 66]
ssss xx =ˆ

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Premultiplicando por la inversa de la primera matriz:
Obtenidos Nx y Nu, calculamos
b) Si elegimos el segundo método, el resultado es trivial; ya que debe ser
c) Si elegimos el tercer método, elegimos lazo cerrado sea unitaria (como en el primer método). Las ecuaciones de todo el sistema son:
donde es el valor obtenido por el método 3 de una ganancia estacionaria de lazo cerrado igual a la unidad si se cumple que:
Resolviendo esta ecuación 71, obtenemos el valor de
Los análisis hechos en esta sección fueron realizados utilizando un observador de orden completo, queda para el lector realizarlos para un estimador de orden reducido.
NxKrNu u −⋅−⋅= (̂
[=
=
•
•
Cy
A
x
x
0
~
M
[ ]0
−⋅−
AC
(ACN
−⋅−=
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
Premultiplicando por la inversa de la primera matriz:
[Ec. 68]
, calculamos como: ; puesto que
b) Si elegimos el segundo método, el resultado es trivial; ya que debe ser
c) Si elegimos el tercer método, elegimos de manera tal que la ganancia total a lazo cerrado sea unitaria (como en el primer método). Las ecuaciones de todo el
es el valor obtenido por el método 3 de . El sistema entonces tendrá una ganancia estacionaria de lazo cerrado igual a la unidad si se cumple que:
Resolviendo esta ecuación 71, obtenemos el valor de como:
análisis hechos en esta sección fueron realizados utilizando un observador de orden completo, queda para el lector realizarlos para un estimador de orden reducido.
⋅
=
−
1
10
DC
BA
N u
xN
N xNK ⋅+= uNN
xKrNKNxKrN xux +⋅−=⋅⋅++⋅−=⋅− ˆ)(ˆ)
N
]
⋅
⋅
−+
⋅
⋅−⋅⋅−
x
x
NMB
B
x
x
CLA
KBKB
~0
~0
NM
0
1
−⋅
⋅−⋅⋅− −
MB
B
CLA
KBKB
N
[ ()(1)
111 CLAKBKB ⋅⋅−⋅−⋅⋅⋅− −−
271
; puesto que u es:
[Ec. 69]
b) Si elegimos el segundo método, el resultado es trivial; ya que debe ser = 0.
de manera tal que la ganancia total a lazo cerrado sea unitaria (como en el primer método). Las ecuaciones de todo el
[Ec. 70]
. El sistema entonces tendrá una ganancia estacionaria de lazo cerrado igual a la unidad si se cumple que:
[Ec. 71]
[Ec. 72]
análisis hechos en esta sección fueron realizados utilizando un observador de orden completo, queda para el lector realizarlos para un estimador de orden reducido.
rN⋅+
N
⋅ rN
1=⋅
N
M
])( MB −

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
Ejemplo: Tenemos el servomecanismo cuya función de transferencia es:
que puede ser representado por el siguiente conjunto de ecuaciones de estado:
Se puede comprobar que con el vector
característica deseada para la ley de control: Por requerimientos de control se pretende que la respuesta estacionaria a una rampa sea inferior al 10 % (por lo tanto Kv = 2. Esto lo podemos verificar aplicando la fórmula de Truxal, teniendo en cuentaque la planta no tiene ceros, y que con la retroalimentación los polos de lazo cerrado están en s = -2 ± 2.j:
Con los dos primeros métodos no puedo manejar el ceros justos se agregan para cancelar los polos del estimador y por lo tanto el quedaría con el mismo valor de 2; en el segundo se agregan ceros (además de los polos del estimador) pero no tengo grados de libertad para elegir casualidad que el mismo diera mayor que 10 (el lector podría realizar los cálculos para determinar cuánto daría en este caso el Por lo tanto me queda el tercer método para manejar el Elegimos colocar un estimador de orden reducipolo), y seleccionamos la ubicación de ese polo (haciendo lo opuesto a lo que generalmente realizamos para elegir la posición del estimador. La idea ahora es colocar el cero que agrega llugar muy cercano a éste transitoria pero sí la respuesta estacionaria. Veamos dónde debe colocarse el cero:
22
11
+−−=
Kv
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
Tenemos el servomecanismo cuya función de transferencia es:
representado por el siguiente conjunto de ecuaciones de estado:
Se puede comprobar que con el vector K = [8 3] se obtiene la siguiente ecuación
característica deseada para la ley de control: Por requerimientos de control se pretende que la respuesta estacionaria a una rampa sea inferior al 10 % (por lo tanto Kv debe ser mayor o igual a 10), pero ahora tiene un
2. Esto lo podemos verificar aplicando la fórmula de Truxal, teniendo en cuentaque la planta no tiene ceros, y que con la retroalimentación los polos de lazo cerrado
Con los dos primeros métodos no puedo manejar el Kv, en la primera porque los ceros justos se agregan para cancelar los polos del estimador y por lo tanto el quedaría con el mismo valor de 2; en el segundo se agregan ceros (además de los polos del estimador) pero no tengo grados de libertad para elegir casualidad que el mismo diera mayor que 10 (el lector podría realizar los cálculos para determinar cuánto daría en este caso el Kv). Por lo tanto me queda el tercer método para manejar el Kv. Elegimos colocar un estimador de orden reducido (agregando por lo tanto un solo polo), y seleccionamos la ubicación de ese polo (p3) en s = -0.1. Notar que estamos haciendo lo opuesto a lo que generalmente realizamos para elegir la posición del estimador. La idea ahora es colocar el cero que agrega la entrada de referencia en un lugar muy cercano a éste s = -0.1, de manera que no se afecte la respuesta transitoria pero sí la respuesta estacionaria. Veamos dónde debe colocarse el cero:
)1(
1)(
+⋅=
sssH
+−=
=•
•
uxx
xx
22
21
4)2()( 2 ++= sscα
444
222
22
1
2 ⋅−⋅++⋅+=
⋅−−−
⋅ j
j
jj
272
Tenemos el servomecanismo cuya función de transferencia es:
representado por el siguiente conjunto de ecuaciones de estado:
= [8 3] se obtiene la siguiente ecuación
. Por requerimientos de control se pretende que la respuesta estacionaria a una rampa
debe ser mayor o igual a 10), pero ahora tiene un 2. Esto lo podemos verificar aplicando la fórmula de Truxal, teniendo en cuenta
que la planta no tiene ceros, y que con la retroalimentación los polos de lazo cerrado
, en la primera porque los ceros justos se agregan para cancelar los polos del estimador y por lo tanto el Kv quedaría con el mismo valor de 2; en el segundo se agregan ceros (además de los polos del estimador) pero no tengo grados de libertad para elegir Kv y sería mucha casualidad que el mismo diera mayor que 10 (el lector podría realizar los cálculos
do (agregando por lo tanto un solo 0.1. Notar que estamos
haciendo lo opuesto a lo que generalmente realizamos para elegir la posición del a entrada de referencia en un
0.1, de manera que no se afecte la respuesta transitoria pero sí la respuesta estacionaria. Veamos dónde debe colocarse el cero:
4
2
1
8
4
)4(
22 ==−−⋅⋅−
j
j

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
273
Por lo tanto, para que Kv sea 10, el cero debe estar en:
Que como notamos está muy cercano al polo p3, con lo cual la respuesta transitoria no se verá afectada y podemos aumentar el Kv a 10 como era el requerimiento estacionario de control. Entonces se diseña un estimador de orden reducido ubicando el polo del estimador en p3 = -0.1, y se determina el valor de M/N de manera que el cero quede ubicado en -0.962. Luego se determina la ganancia para que la ganancia estacionaria completa sea unitaria. Después de esto, puede comprobarse que la función de transferencia total del sistema es:
que posee un Kv = 10 como fue diseñado. También se puede comprobar, que la función de transferencia del compensador así diseñado es equivalente a un compensador tipo adelanto de fase conjuntamente con uno de atraso de fase, que se diseñan en control clásico.
5.101
1.0
1
2
1111111
113211
+=−
−+=−−−=zzpppzK v
0962.04.10
115.10
10
11
1
−=−=⇒=− zz
)1.0()84(
)0962.0(33.8
)(
)()(
2 +⋅+⋅++⋅==
sss
s
sR
sYsT

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIACONTENIDO DIDÁCTICO DEL CURSO: 299005
FUENTES DOCUMENTALES Chi-Tsong, Chen. (1999) Linear
York (USA).
Bolton, W. (2001) Ingeniería de Control
Kuo Benjamín C. (1997) SistemaMéxico.
Brogan, W. L. (1985) Modern Contro
Katsuhico, Ogata. (2008) Ingeniería de Control Modern Webgrafia: Diseño en el Espacio de Estados. Tomado el 28 de enero del 2010 de la fuente
http://www.ib.cnea.gov.ar/~dsc/capitulo8/Capitulo8.htm
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA CONTENIDO DIDÁCTICO DEL CURSO: 299005 – CONTROL ANALÓGICO
FUENTES DOCUMENTALES
r System Theory And Design. Oxford University Press
Ingeniería de Control. Alfaomega 2ª. Edición.
Sistemas Automáticos de Control. Compañía Editorial Continenta
Control Theory. Prentice Hall. New York.
Ingeniería de Control Modern. Pearson Prentice. 4ª. Edición.
Diseño en el Espacio de Estados. Tomado el 28 de enero del 2010 de la fuente
http://www.ib.cnea.gov.ar/~dsc/capitulo8/Capitulo8.htm
274
Press. Third Edition. New
Continental S.A.
Prentice. 4ª. Edición.