Trabajo Control analogico
47
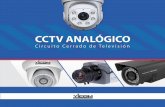
Sistemas de Control Analógico Trabajo Final - 50% En la figura, se representa un sistema de control de la velocidad de un motor. Se desea que el error de estado estacionario de la velocidad del motor sea menor que 1%. Se requiere que al encenderse el motor se acelere hasta su velocidad de estado estacionario en un tiempo de establecimiento de 2 segundos. Como una velocidad mayor que la referencia podría dañar el equipo, se debe tener un máximo sobrepico menor que 5%. Seleccione los parámetros a y b de la función de transferencia del proceso. 1. Realice una descripción de la operación del sistema en lazo cerrado, identifique las variables y bloques del sistema. 2. Considerando Gc(s) = K (seleccione un valor para K), D(s) = 1/s y R(s) = 1/s, determine: a. Comportamiento (entrada – salida) de la planta en lazo abierto (respuesta en el tiempo y en frecuencia).
description
solucion ejercicios de control analogico
Transcript of Trabajo Control analogico

Sistemas de Control Analógico Trabajo Final - 50%
En la figura, se representa un sistema de control de la velocidad de un motor.
Se desea que el error de estado estacionario de la velocidad del motor sea
menor que 1%. Se requiere que al encenderse el motor se acelere hasta su
velocidad de estado estacionario en un tiempo de establecimiento de 2
segundos. Como una velocidad mayor que la referencia podría dañar el equipo,
se debe tener un máximo sobrepico menor que 5%.
Seleccione los parámetros a y b de la función de transferencia del proceso.
1. Realice una descripción de la operación del sistema en lazo cerrado,
identifique las variables y bloques del sistema.
2. Considerando Gc(s) = K (seleccione un valor para K), D(s) = 1/s y R(s) =
1/s, determine:
a. Comportamiento (entrada – salida) de la planta en lazo abierto
(respuesta en el tiempo y en frecuencia).
b. Comportamiento del sistema realimentado considerando el controlador
sólo con acción proporcional: Respuesta transitoria, error de estado
estacionario y respuesta en frecuencia. Estime las características de la
respuesta en el tiempo del sistema en lazo cerrado utilizando la
respuesta en frecuencia.

3. Considerando D(s) = 0,
a. Diseñar un compensador que permita obtener el desempeño antes
enunciado, utilice los métodos del LGR y respuesta en frecuencia.
b. Realice el análisis de estabilidad del sistema en lazo cerrado por Routh-
Hurwitz, Bode y Nyquist.
c. Realice un análisis de robustez del sistema. Determine la sensibilidad
del sistema ante un cambio en el parámetro a (seleccione de manera
conveniente la variación del parámetro).
d. Determine el efecto y como podría el sistema rechazar una perturbación
de tipo sinusoidal a la entrada de la planta. (Seleccione la frecuencia de
la perturbación).
e. Con H(s) = e –s, analice el efecto del retardo de tiempo en el sistema
compensado.
Resuelva, analice y realice la simulación de los anteriores puntos. La entrega
debe contener los archivos de simulación y un documento explicativo de los
procedimientos, resultados de simulación y análisis realizado, incluya las
gráficas utilizadas para análisis y diseño, analice los resultados

Seleccione los parámetros a y b de la función de transferencia del
proceso
Seleccionamos el polo del sistema (a) en el semiplano izquierdo, para no
afectar la estabilidad mediante este polo. Además lo seleccionamos lejos del
origen para que no me genere un mayor tiempo de estabilización.
a=6
A partir de aquí hallamos el valor de b para que el sistema sea estable en lazo
cerrado.
Utilizando el criterio de Routh Hurwitz, encontramos que b debe ser menor a 41
para que el sistema sea estable.
b=5
G(s) = 5/((s+6)*(s2 + s + 1))
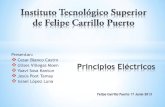
En la siguiente grafica podemos observar el comportamiento del sistema en el
tiempo.

Tenemos entonces, un sistema estable, pero con parámetros de estabilización
y Maximo Pico inadecuados, además de un error de 54.5%, a partir de estos
resultados se deberá realizar un diseño que me permita obtener los parámetros
requeridos.

1. Realice una descripción de la operación del sistema en lazo cerrado,
identifique las variables y bloques del sistema
El sistema es un control de velocidad de un motor el cual se compone de la
planta G(s) la cual contiene al motor, un sensor H(s) que nos mide la señal
de salida y me la lleva nuevamente a la entrada, la señal realimentada es
comparada con la señal de entrada para generar cambios en la variable
manipulada, esta comparación nos genera una señal de error (diferencia
entre señal de realimentada y la de referencia), este error indica al
controlador la acción que debe realizar (incrementar, decrementar o
mantener constante la variable manipulada) y dependiendo de la acción de
controlador, este variara la corriente que le llegue al circuito de contenga a
motor para poder ajustar la velocidad del mismo a una deseada a través del
actuador que bien podría ser un circuito integrado de potencia.

2. Considerando Gc(s) = K (seleccione un valor para K), D(s) = 1/s y R(s) =
1/s, determine:
Selecciono k=2, teniendo como referencia que la máxima ganancia permitida para garantizar la estabilidad es k=8.44 aproximadamente.
clear all, close alls=tf('s')g=5/((s*s + s + 1)*(s+6))%Funcion escogidarlocus(g)
a. Análisis En Lazo Abierto
b=5; a=6
C(s)= G(s)*R(s)*Gc(s) – D(s)*G(s)
C(s)= [(k*b)/((s+a)*(s2 + s + 1))]*R(s) - [b/((s+a)*(s2 + s + 1))]*D(s)

C1(s)= [(k*b)/((s+a)*(s2 + s + 1))]*R(s)
C2(s)= [b/((s+a)*(s2 + s + 1))]*D(s)
Lim s*C1(s) = Lim s* [(k*b)/((s+a)*(s2 + s + 1))]*(1/s) = [(k*b)/((s+a)*(s2 + s + 1))]s---0 s---0
Lim s*C2(s)= Lim s* [b/((s+a)*(s2 + s + 1))]*(1/s)= [b/((s+a)*(s2 + s + 1))]s---0 s---0
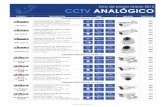
Graficamos la respuesta transitoria considerando k=2
En la siguiente grafica podemos observar las señales generadas, una respecto
al disturbio, otra respecto a la entrada y la señal de salida total.

Tenemos entonces, un sistema subamortiguado, estable ante una entrada
escalon, además de esto, obtenemos parámetros que difieren de los requeridos
y ponen en peligro el equipo, además de presentar un funcionamiento que no
es el indicado.
Respuesta en frecuencia en lazo abierto (considerando K=2)
margin(2*g)

AB=1.99 rad/seg (Aproximadamente)
MG=12.673dB
MF=44.573°
Tenemos un sistema estable, puesto que tanto el margen de fase como el margen de ganancia son positivos.
b. Análisis en Lazo cerrado (k=2)
b=5; a=6;k=2
C(s)= R(s)*[G(s)*Gc(s)] / [1+ Gc(s)*G(s)] – [D(s)*G(s)] / [1+Gc(s)*G(s)]
C1(s)= R(s)*[G(s)*Gc(s)] / [1+ (Gc(s)*G(s))]
C2(s)= [D(s)*G(s)]/[1+(Gc(s)*G(s))]
Lim s*C1(s) = Lim s* R(s)*[G(s)*Gc(s)] / [1+(Gc(s)*G(s))] s---0 s---0
Lim s*C2(s)= Lim s* [D(s)*G(s)]/[1+(Gc(s)*G(s))] s---0 s---0
C1(s)= 10 s^3 + 70 s^2 + 70 s + 60
-----------------------------------------------------------------------
s^6 + 14 s^5 + 63 s^4 + 120 s^3 + 203 s^2 + 154 s + 96
C2(s)= 5 s^3 + 35 s^2 + 35 s + 30
---------------------------------------------------------------------
s^6 + 14 s^5 + 63 s^4 + 120 s^3 + 203 s^2 + 154 s + 96

Respuesta transitoria
clear all, close alls=tf('s')g=5/((s*s + s + 1)*(s+6))%Funcion escogidagc=2
c1=(g*gc)/(1+(gc*g)) %Señal debido a la entradac2=g/(1+(gc*g))%Señal debido al disturbio
step(c1)hold on step(c2)[c1,t]=step(c1,20)[c2,t]=step(c2,20)
%Respuesta total del sistemac=c1-c2hold onplot(t,c)legend('Señal debido a la entrada','Señal debido al disturbio','Respuesta Total')

Mp=47% Lazo cerradoTs=10.8segess = 0.687
Tenemos un sistema en lazo cerrado, cuyos parámetros de respuesta en el
tiempo no cumplen con los requeridos, para ello quizá sea necesario variar la
ganancia o llegar hasta el diseño de un controlador adecuado.
Mp=16% Lazo abiertoTs=8.23ess = 0.167

Respuesta en frecuencia
clear all, close alls=tf('s')g=5/((s*s + s + 1)*(s+6))%Funcion escogidagc=2
K=feedback(g*gc,1)margin(K)
AB=2.03rad/Seg
Tenemos márgenes de fase y ganancia positivos, lo que quiere decir que el
sistema en lazo cerrado es estable.

Respuesta transitoria en lazo cerrado a partir de la respuesta en frecuencia
A partir de la grafica de bode del sistema en lazo abierto, podemos hallar un AB aproximado.
AB=1.98rad/seg
ς=MF /100 para = 44.573/100=0.44573
AB = 1.98; zita = 0.44573;
Ts = (4/(AB*zita))*sqrt(1-2*zita^2+sqrt(4*zita^4-4*zita^2+2))
Tp = (pi/(AB*sqrt(1-zita^2)))*sqrt(1-2*zita^2+sqrt(4*zita^4-4*zita^2+2))
Ts = 6.0302 seg
Tp =2.3583 seg
Tenemos que los datos obtenidos en la respuesta transitoria (Ts=10.8seg;
Tp=2.26seg) no difieren tanto de los que obtenemos a partir de la respuesta en
frecuencia. Las diferencias que se presentan, se deben a que el método de
análisis esta dado para sistemas de segundo orden, por lo tanto los resultados
que obtuvimos son una aproximación que podemos realizar gracias a que las
raíces dominantes son complejas conjugadas.

Diseño de compensador
La ganancia para la cual la planta es marginalmente estable calculada a partir del diagrama de bode es:
Kcr=10MG /20=1011.845 /20=3 . 91
2. Diseñar un compensador que permita obtener el desempeño antes
enunciado, utilice los métodos del LGR y respuesta en frecuencia.
Las especificaciones del sistema son:
M p≤5 %t s=2 segess≤1 %
Por lo tanto:
t s=4ζw
=2 seg
wn=40 .69×2
=2. 90 rad / seg
1. LGR
El sistema tiene tres polos ubicados en:
P1,2=−0 .5±0 . 87 jP3=−6
M p=e−ζπ √1−ζ2
=5%
ln (0 .05)=−ζπ √1−ζ2
(−2. 99 )2=ζ2 π2(1−ζ2 )2
8 .97−8 .97 ζ2=ζ 2π 2
8 .97=ζ 2( π2+8 .97 )8 .97=1884 ζ2
ζ=√0 . 48=069

ζ=0 .69 y wn=2. 90 rad /seg
, se tiene que las raíces dominantes deben ser(raíces deseadas):
S1,2=−ζwn±wn√(1−ζ2 )S1,2=−2±2. 1 j
Calculando el aporte total de la planta (φG ) a las raíces deseadas, se tiene:
φ p1=180−tan−1(1 .231 .5 )=140 .65 º
φ p2=180−tan−1(2 . 971 .5 )=116 .8 º
φ p3=tan−1(2. 14 )=27 .7 º
Entonces: G = -φ p1 -
φ p2 -φ p3
G = -140.65 -116.8 -27.7= -285.14
Incluyendo un compensador se tiene: φC - G =-180
φC= -180+285.14= 105.14
El aporte de fase del compensador debe ser positivo, por lo tanto se implementa un compensador en adelanto:
Ubicando al cero de la red de adelanto en z = -1:
φZC=180−tan−1 (2 )=115.46φZC−φPC−φG=−180φ PC=−180+285 . 14+115. 46φPC=10 .32
Como consecuencia, el polo del compensador en adelanto se debe localizar en:

tanφPC=2 .1x
⇒ tan(10 . 32)=2 .1x
x=2 .1tan(4 .08 º )
=11. 53⇒ pC=−13 .53
La ganancia para el sistema compensado es:
K= Distancias de polos Distancias de ceros
K=||1 . 94||×||3. 32||×||4 . 52||×||11.9||
||2 .32||×5=29 .86
Luego:
Gc( s )=29 . 86s+1s+13 .72
El sistema compensado es:
Gcad( s )G( s )=149 . 33( s+1 )
( s2+s+1)( s+5 )( s+13 .72 )
El lugar geométrico de las raíces el siguiente:
Con el compensador en adelanto se ubican las raíces en el lugar deseado -2.01±2.1

La respuesta en el tiempo de este sistema ante una entrada escalón produce:
M p=31.1%, t s =2.48seg, y
ess=35.5%
Debido a que no se cumple con las especificaciones de ess menor a 1% se implementa un controlador en atraso.
ess=1
1+K p
=0 .01⇒K p=99
K pactual=lims→0
Gcad ( s )G( s )= lims→0
149 . 33(s+1)(s2+s+1 )(s+6 )(13. 7 )
=1 .82
K pcomp=K pactual×zp
=99⇒ zp
=99÷1. 82=54 .39
Si se supone z=-0.5, el polo entonces se ubica en p=-0.01 y el sistema compensado queda:
GcatrGcad (s )G(s )=29 .86( s+1 )(s+0 .5 )
( s2+s+1)( s+5 )(s+0 . 01)

Y la respuesta ante una entrada tipo escalón es:
M p=4.78%, t s =8.82 seg, y
ess=1%
Con los compensadores en adelanto y atraso implementados se logro cumplir algunos de los requerimientos planteados al inicio como es el Mp< al 5% y el error de estado estacionario de 1% pero no se pudo obtener un tiempo de estabilización de 2 seg.
b. COMPENSADOR POR FRECUENCIA
Las especificaciones del sistema son:
Mp<=5%
Ts=2Seg

ess<=1%
Por lo tanto:
t s=4ζw
=2 seg
wn=40 .69×2
=2. 90 rad / seg
De las especificaciones del sistema se tiene:
ζ=√0 . 48=069 wn=2.90rad/seg y Kp=99
Hallamos el tiempo pico a partir del ancho de banda
AB=wn√(1−2ζ 2)+√4 ζ 4−4 ζ2+2=2. 97 rad / seg
Tp = 1.4967
Necesitamos Kp=99:
Kp= lims→0
Kcs+zs+ p ( 5
( s2+s+1)( s+6 ))=99
Kczp=118. 8⇒ K
M p=e−ζπ √1−ζ2
=5%
ln (0 .05)=−ζπ √1−ζ2
(−2. 99 )2=ζ2 π2(1−ζ2 )2
8 .97−8 .97 ζ2=ζ 2π 2
8 .97=ζ 2( π2+8 .97 )8 .97=1884 ζ2
ζ=√0 . 48=069
T p=π
AB∗√1−ς2√(1−2 ς2 )+√4 ς4−4 ς2+2

Graficamos k*G(s)
MG= -22.803dB
MF= -45.008º
MF=90−tan−1 √−2 ζ 2+√1+4 ζ4
2 ζ
Un coeficiente de amortiguamiento ζ=0 .69 , implica una margen de fase MF=64.6º:
MF=atan(2*S/sqrt(-2*S^2+sqrt(1+4*S^4))) % Comandos matlab
MF=(MF*180)/pi
MF = 64.6195

El sistema sin compensar tiene un MF=-45º, con w=7.8 rad/seg. Al ser realimentado con k=118.8, el sistema es inestable. Utilizo entonces un compensador en atraso para lograr el margen de fase necesario.
La fase que debe aportar el compensador en atraso es:
F_comp=64.6+10 = 74.6
Ubico la frecuencia donde la fase es -105.4º
Tenemos entonces que la nueva frecuencia de cruce será wc=1.04rad/seg.
Donde se tiene una atenuación de 39.3dB
Calculamos alfa:
−20 log α=−39 . 3α=92 . 257
Determino la ubicación del cero y el polo
z=wc/10=0.104
p=z/α =0.001127
Para la ganancia:

Kczp=118. 8
De donde Kc=1.28
El compensador es:
Gcatr=1. 28s+0 .104s+0.0011
Comprobamos que el margen de fase sea el que necesitamos:
gc=1.28*((s+0.104)/(s+0.001127)) %comandos matlabmargin(g*gc)H=feedback(g*gc,1)step(H)

Ts=56.8seg y ess=1% , además se presenta un pico inferior a la referencia de laentrada.
AB obtenido=1.62rad/seg
AB requerido=2.97rad/seg
Obtuvimos un margen de fase compensado igual a 68.83, que se acerca al deseado MF=64.6. Por otra parte el ancho de banda que obtuvimos fue menor en comparación al

que se esperaba, esto produce que el tiempo de estabilización aumente considerablemente. Observando el comportamiento de las raíces dominantes en lazo cerrado, podemos observar que el sistema se ve afectado por el polo que esta cercano al origen (s=0.559), aumentando de esta manera el tiempo de estabilización (Ts aumenta entre mas cerca se encuentre un polo del origen).
Por ultimo, el error en estado estacionario para una entrada escalón, se cumple satisfactoriamente por el polo cercano al origen.
Analizamos ahora el comportamiento del controlador diseñado en frecuencia, con el fin de observar si variando los parámetros del compensador en atraso, podemos obtener una respuesta que se acerque mas a la deseada.

Gcatr=1.28s+0 .104s+0.0011
Tenemos que la ganancia la podemos variar, máximo hasta 7.74 para garantizar la estabilidad de nuestro sistema.
Si la variamos por encima de su valor actual, disminuimos el Ts, pero a su vez aumentamos el MpK=4

Si la ganancia se varia por debajo de su valor actual, sucede lo contrario, es decir, se aumenta el Ts y se disminuye el Mp.
K=1

Como el requerimiento inicial, nos pide un Mp<5%, variamos la ganancia hasta el limite que se nos pide de máximo pico, con el fin de disminuir un poco el tiempo de estabilización. Tenemos entonces una k=2.18
Mp=4.91, tss=41.2seg, y ess=0.6%
A partir de la ubicación de las raíces en lazo cerrado del sistema compensado, nos damos cuenta que el polo que esta cercano al origen, afecta la respuesta subamortiguada, buscamos entonces alejar el polo del origen para tratar de obtener un tiempo de estabilización menor al que tenemos.
Ubicamos ahora el cero para luego calcular la ubicación del polo, se desea entonces que z=0.4
P=z/92.257P=0.00433

Variando de nuevo la ganancia hasta 1.35, obtengo un sistema que se ajusta un poco mas a los parámetros requeridos, garantizándome la seguridad de mi equipo mediante un Mp<5%, con un error minimo, esto a pesar de tener un tiempo de estabilización superior al requerido.
El nuevo compensador en atraso es el siguiente:
Gcatr=1. 35s+0 . 4
s+0. 0043

Realice el análisis de estabilidad del sistema en lazo cerrado por Routh-Hurwitz, Bode y Nyquist.
ANÁLISIS DE ESTABILIDAD POR ROUTH-HURWITZ
a) Para los compensadores hallados con el LGR:
Gc( s )=29 . 86s+1s+13 .72
Gcatr ( s )=s+0 .5s+0 .01
G( s )=5( s 2̂+s+1 )(s+6 )
Para hacer el análisis de estabilidad necesito la función de transferencia:
T (s )=GcatrGcad ( s )G (s )
1+GcatrGcad (s )G( s )
El método de la estabilidad ROUTH-H. Proporciona una respuesta al problema de estabilidad considerando la ecuación característica, en este caso tenemos:
Ecuación característica: s^5 + 20.73 s^4 + 103.2 s^3 + 132.9 s^2 + 128.1 s + 15.75
Aplicando Criterio de Routh-Hurtwitz, se tiene que:
Criterio De Routh-Hurtwitz
S5 1 103.2 128.1
S4 20.73 132.9 15.75
S3 96.78 127.34 0
S2 105.62
15.75 0
S1 112.9 0 0
S0 15.75 0 0

Analizando la tabla podemos observar que el sistema con los controladores escogidos, es estable ya que no hay ningún cambio de signo en la primera columna, todos son positivos.
b) Para el compensador hallado por frecuencia tenemos:
Gcatr=1. 35s+0 . 4
s+0. 0043
G( s )=5( s 2̂+s+1 )(s+6 )
Para hacer el análisis de estabilidad tenemos la función de transferencia:
T (s )=Gcatr (s )G(s )
1+Gcatr ( s )G( s )
A partir de la función de transferencia hallamos la ecuación característica:
E.C: s^4 + 7.004 s^3 + 7.03 s^2 + 12.78 s + 2.726
Aplicando Criterio de Routh-Hurtwitz, se tiene que:
Criterio De Routh-Hurtwitz
S4 1 7.03 2.726
S3 7.004
12.78 0
S2 5.205
2.726 0
S1 47.43
0 0
S0 2.726
0 0

Analizando la tabla podemos observar que el sistema con los controladores escogidos, es estable ya que no hay ningún cambio de signo en la primera columna, todos son positivos.
ANÁLISIS DE ESTABILIDAD POR BODE.
a) Con los compensadores hallados en el lugar geométrico
Gc( s )=29 . 86s+1s+13 .72
Gcatr ( s )=s+0 .5s+0 .01
G( s )=5( s 2̂+s+1 )(s+6 )

Gm=18.593dB Pm=98.78deg
Para el valor encontrado de ganancia en el controlador de adelanto el sistema es estable. Como podemos ver en el diagrama de bode, tanto el MG, como el MF, son positivos lo que indica que el sistema es estable.
Los márgenes adecuados de fase y de aumento nos aseguran contra las variaciones de los componentes del sistema y se especifican para valores de frecuencia definidos. Los dos valores delimitan el comportamiento del sistema en lazo cerrado.
b) Para el compensador hallado por frecuencia tenemos:
Gcatr=1. 35s+0 . 4
s+0. 0043
G( s )=5( s 2̂+s+1 )(s+6 )
Graficamos en bode:

Para el valor encontrado de ganancia en el controlador de adelanto el sistema es estable. Como podemos ver en el diagrama de bode, tanto el MG, como el MF, son positivos lo que indica que el sistema es estable.
ANÁLISIS DE ESTABILIDAD POR NYQUIST.
a) Con el compensador hallado en el lugar geométrico
Gc( s )=29 . 86s+1s+13 .72
Gcatr ( s )=s+0 .5s+0 .01

G( s )=5( s 2̂+s+1 )(s+6 )
Como podemos observar en el diagrama de nyquist el sistema es estable ya que no encierra al punto – 1. Además que al variar K hasta el infinito seguirá sin rodear al punto -1.
b) Para el compensador hallado por frecuencia tenemos:
Gcatr=1. 35s+0 . 4
s+0. 0043
G( s )=5( s 2̂+s+1 )(s+6 )

Como podemos observar en el diagrama de nyquist el sistema es estable ya que no encierra al punto – 1. Además que al variar K hasta el infinito seguirá sin rodear al punto -1.
Determine el efecto y como podría el sistema rechazar una perturbación de tipo sinusoidal a la entrada de la planta. (Seleccione la frecuencia de la perturbación).
Escogiendo una señal sinusoidal cuadrada por Fourier puedo descomponer esa señal en muchas partes de esta misma denominadas armónicos de la señal, siendo el primer armónico el que mas información de la señal original tiene también llamada fundamental.
Se sabe que una señal periódica de potencia finita se puede descomponer en una suma de senos y cosenos (Serie de Fourier). Adicionalmente se conoce que una onda cuadrada analizada por series de Fourier, esta descrita por la sumatoria de señales sinusoidales, pues los coeficientes ak(pares) que acompañan los cosenos dan siempre cero, y los únicos coeficientes con valores, son los coeficientes bk (impares) que acompañan a los senos:
Una onda cuadrada puede expresarse como la sumatoria de las n señales sinusoidales como se muestra a continuación:

Se puede observar que la señal fundamental posee la misma frecuencia que la señal cuadrada original y que las demás señales que se superponen para dar forma a la onda, presentan frecuencias múltiplo de la frecuencia de la señal original.
Con un disturbio sinusoidal, la salida se ve afectada de diferentes maneras, la entrada de la planta se convierte en una onda de frecuencia w y amplitud A, subida por el nivel DC que introduce la entrada escalón. La respuesta de la planta es una onda de amplitud pequeña subida un nivel DC por encima de la velocidad especificada (aprox en 2m/seg), entonces la presencia de esta perturbación puede provocar el daño de la planta.
Por eso se hace necesario implementar un filtro que permita atenuar las señales con frecuencias iguales y mayores a la frecuencia de la de la señal de perturbación.
Suponemos una señal de disturbio con amplitud A=10m/seg y una frecuencia Wc=10rad/seg
D( s )=3 sen10 t
Ya habiendo escogido la señal de disturbio procedemos a observar el comportamiento
del sistema para ver como varia la salida ante el disturbio escogido.
Se elabora el diseño del sistema en simulink:

La señal de salida del sistema es:
Como se puede ver la señal de salida es una señal con poco disturbio, la magnitud de
la señal de disturbio es mermada en gran parte debido al sistema compensado en si
ya que según nos muestra bode:

Las señales con frecuencia mayor a 3 rad/seg son atenuadas y para la señal de disturbio seleccionada, esta es atenuada 12.5 veces por lo que el disturbio es muy poco.
CON UNA FUNCIÓN DE REALIMENTACION CON RETARDO H (s )=e−s con τ = 1
La función del retardo es adicionarle fase negativa al sistema, en este caso a cualquier de los sistemas compensados los puede volver inestables.
Se analizaran los sistemas con controladores hallados con LGR y para respuesta en frecuencia.
La gráfica de bode del sistema hallado con LGR es:

El cual es estable ya que el margen de ganancia y el margen de fase son positivos.
Ahora le agregamos un retardo con T=1 y vemos como afecta el retardo al la estabilidad y como se ve afectado el sistema en general:

Como se puede observar el margen de ganancia y el margen de fase son ahora negativas por lo que el sistema se hace inestable añadiéndole el retardo tipo H(s) = e-st, con t igual a 1 seg.
La gráfica de bode del sistema hallado por respuesta en frecuencia es:
Como se puede observar el sistema es estable ya que tiene margen de ganancia y fase positivas.

Ahora se le grafica el sistema con el compensador hallado por respuesta en frecuencia con retardo t=1seg.
Observando la grafica se ve que el sistema es inestable debido a que ambos márgenes, de ganancia y de fase son positivos.
Como se pudo dar cuenta el retardo aporta fase negativa al sistema convirtiendo los sistemas en inestables.