Trab Col2 Control Analogico
15
CONTROL ANALOGICO ACTIVIDAD 6 TRABAJO COLABORATIVO 2 POR DANIEL ELOY REYES BALLESTAS COD.9098789 OSCAR CASTRILLON GIRALDO FABIÁN BOLÍVAR MARÍN DIRECTOR DE CURSO UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD FACULTAD DE CIENCIAS EXACTAS TECNOLOGÍA E INGENIERÍA COLOMBIA 2012
-
Upload
daniel-eloy-reyes-ballestas -
Category
Documents
-
view
942 -
download
2
Transcript of Trab Col2 Control Analogico

CONTROL ANALOGICO
ACTIVIDAD 6TRABAJO COLABORATIVO 2
POR
DANIEL ELOY REYES BALLESTASCOD.9098789
OSCAR CASTRILLON GIRALDO
FABIÁN BOLÍVAR MARÍNDIRECTOR DE CURSO
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADFACULTAD DE CIENCIAS EXACTAS TECNOLOGÍA E INGENIERÍA
COLOMBIA2012

INTRODUCCION
El control analógico nos genera grandes avances en el área de la electrónica ylas telecomunicaciones llegando a convertirse en una materia fundamental enel desarrollo de nuestra carrera ya que su aplicación se extiende en todos loscampos de nuestra vida diaria mediante el reconocimiento de la unidades delmódulo de control digital, con el objetivo de ir avanzando en la búsqueda delcocimiento personal, se harán aportes grupales con el fin interactuar eintercambiar pensamientos y conocimientos con nuestros compañeros yorientados por el tutor estudiaremos todos los temas que la comprenden yseguiremos estudiando en el recorrido de las diferentes carreras y queaplicaremos como futuros profesionales.
El control automático es uno de los campos de aplicación de la electrónica queha influido de manera significativa en el desarrollo industrial, ya que permiteque las maquinas hagan tareas repetitivas con un alto grado de precisióndentro de un proceso de producción industrial. Además ha permitido que elhombre pueda controlar procesos que antes parecían imposibles (Fabricaciónde piezas con precisión de micras, fabricación de microchips de alta escala deintegración, controlar armas a distancias, entre otros).

OBJETIVOS
• Solucionar los ejercicios propuestos mediante fórmulas problemáticaspresentadas en el proceso de control.
• Organizar tareas colectivas aportando y superando las dificultades que sepresenten, con una actitud tolerante hacia las ideas de los compañeros.
• Mantener buenas relaciones con los miembros del grupo,responsabilizándose de la consecución de los objetivos.
• Socializar las inquietudes a través del foro.
• Definir y proponer cambios en la mejora del planteamiento y solución de lasinquietudes • Realizar los cálculos para solucionar los ejercicios planteados deforma individual.

DESARROLLO
1. Diseñar un controlador PID para el sistema de la figura de tal maneraque el sobre impulso sea máximo del 8% y el tiempo de establecimientosea de 3 segundos.
Todos los métodos de diseño conducen a determinar los valores de Kp, Ti y Tdque hacen.
Que el sistema de lazo cerrado tenga la respuesta adecuada, medida entérminos del cumplimiento de las especificaciones de diseño (error en régimenpermanente, velocidad de respuesta permanente –tp, tr, ts- y sobre impulso).
El Método de Ziegler-Nichols, descrito en varios textos, indica que inicialmentese deben Anular las acciones integral (Ti=infinito) y derivativa (Td=0). Luegoincrementar gradualmente Kp hasta que el sistema justo comience a oscilar.Este punto de inestabilidad es denominado la "última ganancia" Pu y "últimoperíodo" Tu. A partir de estos valores, se pueden ajustar las ganancias delcontrolador PID como sigue, para cada una de sus diversas modalidades:
Las características de P, I, y los controladores de D
CL
CL
RESPUESTA Tiempo de
Subida Rebasamiento Tiempo de
Establecimiento SS ERROR
Kp Disminución Aumento Small Change Disminución
Ki Disminución Aumento Aumento Eliminar
Kd Small Change Disminución Disminución Small Change
Solución por el método de la última ganancia
• Establecemos que Ti=cc y Td=0

• Optemos la función de transferencia en lazo cerrado del modo siguiente:
• La ecuación característica es :
• El arreglo de Routh se convierte en:
• De acuerdo al criterio de estabilidad la ganancia y la ganancia crítica es
• Entonces la ecuación característica se vuelve en
Para encontrar la frecuencia de oscilación sostenida sustituimos s=jω en laecuación característica:
La ecuación también se puede plantear:
La frecuencia de la oscilación sostenida es dada por;
El periodo de la oscilación sostenida está dada por ;
• Ahora hallamos las variables iniciales:K_(p, ) T_(i, ) T_(d, )
La función de transferencia del controlador será:
La función de transferencia queda de la siguiente manera;
• La función de transferencia en lazo cerrado
(C(s))/(R(s))=(G_(c(s))*G_(p(s)))/(1+G_(c(s))*G_p(s) *H_((s)) )
(C(s))/(R(s))=(((44,2512s^2+252s+357,44)/s)*(1/((s)(s+1)(s+20))))/(1+((44,2512s^2+252s+357,44)/s)*(1/((s)(s+1)(s+20))) )
=((44,2512s^2+252s+357,44)/((s)(s)(s+1)(s+20)))/(1+(44,2512s^2+252s+357,44)/((s)(s)(s+1)(s+20)))
=((44,2512s^2+252s+357,44)/(s^4+21s^3+20s^2 ))/((s^4-21s^3-64,2512s^2-252s+357,44)/(s^4+21s^3+20s^2 ))
=(44,2512s^2+252s+357,44)(s^4+21s^3+20s^2 )/(s^4-21s^3-64,2512s^2-252s+357,44)(s^4+21s^3+20s^2 )
(C(s))/(R(s))=((44,2512s^2+252s+357,44))/((s^4-21s^3-64,2512s^2-252s+357,44) )
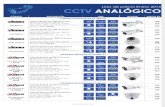
Luego realizamos la gráfica de un escalón unitario de la función detransferencia
El sobrepaso máximo en la respuesta escalón unitario es de aproximadamente8%

Comandos en Matlab
num=[0 0 44.2512 252 357.44];
>> den=[1 21 64.2512 252 357.44];
>> step (num,den)
>> grid
>> title('Respuesta Escalón Unitario')
• Ahora debemos realizar una sintonía del controlador hasta llegar a un valoraproximada de sobrepaso máximo del 8%, solo se mostrara los cálculos delmétodo que se pudo llegar a esta aproximación.
Dejamos Kp= 252 y Ti y Td las multiplicamos por un factor de 3.5, obteniendola Función de transferencia del controlador PID.
G_(S(C))=252+252/2,4675s+154,8792s
G_(S(C))=252+102,1277/s+154,8792s
G_(S(C))=(252S+102,1277)/s+154,8792s
G_(S(C))=(252S+102,1277+154,8792s^2)/s
G_(S(C))=(154,8792s^2+252S+102,1277)/s
Función de transferencia en lazo cerrado:
(C(s))/(R(s))=(G_(c(s))*G_(p(s)))/(1+G_(c(s))*G_p(s) *H_((s)) )
(C(s))/(R(s))=(((154,8792s^2+252s+102,1277)/s)*(1/((s)(s+1)(s+20))))/(1+((154,8792s^2+252s+102,1277)/s)*(1/((s)(s+1)(s+20))) )
=((154,8792s^2+252s+102,1277)/((s)(s)(s+1)(s+20)))/(1+(154,8792s^2+252s+102,1277)/((s)(s)(s+1)(s+20)))
=((154,8792s^2+252s+102,1277)/(s^4+21s^3+20s^2 ))/((s^4-21s^3-174,8792s^2-252s+102,1277)/(s^4+21s^3+20s^2 ))
=(154,8792s^2+252s+102,1277)(s^4+21s^3+20s^2 )/(s^4-21s^3-174,8792s^2-252s+102,1277)(s^4+21s^3+20s^2 )
(C(s))/(R(s))=((154,8792s^2+252s+102,1277))/((s^4-21s^3-174,8792s^2-252s+102,1277) )
_ 〖kk〗_K_p=0,06K_cr=0,6*420=252

K_t=K_p/T=252/0,705=357,4
K_d=K_p/T_d =252/0,1756=1435,08
El sobrepaso máximo en la respuesta escalón unitario es de aproximadamente8%.
2. Para el siguiente sistema determine:
Su controlabilidad.
Su observabilidad.
1. La matriz de Controlabilidad es de la siguiente forma:
X=Ax+Bu
x= vector de estados.
u= señal de control escalar.
A= Matriz nxn.
B= Matriz nx1.

2. Para el siguiente sistema determine:
1. Su controlabilidad.
2. Su observabilidad.
Controlabilidad =[B AB A² B]
12 10 51 0 00 1 0
A=
100
B=
1 121340 1 120 0 1
Ctr =

Las columnas son L.I., por lo tanto el sistema se considera controlable.
Observabilidad =[ ]
12 10 51 0 00 1 0
A=
C= [35− 5 ]
3 313375 352955 15155
Obs=
Las columnas son L.I., por lo tanto el sistema es considerado observable
%-----------------------------------------------------------------------------
%REG.AUTOMATICA Y MATLAB
%ejemplo: Modelo de estado
%-----------------------------------------------------------------------------
% primero introducimos las matrices de estado, de entrada de salida y detransmisión directa.
a=[-12 -10 -5; 1 0 0; 0 1 0]
b=[1;0;0]
c=[3 5 -5]
sys=ss(a,b,c) % creamos el modelo en espacio de estado
sys=ss(a,b,c,0.01) % si fuera un sistema discreto de añade el tiempo demuestreo.
sys=ss(c) % ganancia de la matriz d

1. Controlabilidad del sistema
Podemos observar que el sistema anteriormente descrito tiene la formadel sistema en tiempo continuo.
Donde x = vector de estados (vector de dimensión n) u = señal decontrol (escalar)
u = señal de control (escalar).A = matriz de n x nB = matriz de n x 1
Donde A y B son matrices constantes de dimensiones nxn y nxrrespectivamente, es completamente controlable, si y solo si, la matriz decontrolabilidad de dimensión nx (nr):
Es de rango n.
De acuerdo a lo expuesto anteriormente el sistema es de orden tres, porlo que la matriz de controlabilidad es la siguiente:
De donde:

Podemos observar este desarrollo en matlab
Podemos observar este desarrollo en matlab

Podemos observar este desarrollo en matlab
Por tanto la matriz de controlabilidad queda:
Por lo que podemos deducir que la matriz de controlabilidad es de orden3 que es igual al sistema, por lo que el sistema es controlable.
2. Observabilidad del sistema
Primero consideraremos el sistema lineal variante en el tiempo no-forzado:
,
Donde A y C son matrices constantes de dimensiones nxn y mxnrespectivamente, son completamente observables, si y solo si, la matrizde observabilidad de dimensión (m.n) xn

Es de rango n.
Por lo que podemos observar que el sistema anterior es de orden 3, generandouna matriz de observabilidad como la siguiente:
Entonces:
Desarrollando esta matriz en matlab podemos comprobar que:
*

Desarrollando esta matriz en matlab podemos comprobar que:
Por tanto:
Y podemos deducir que la matriz de observabilidad es de orden tres igual queel sistema por lo cual el sistema es observable.

CONCLUSIONES
Se lograron desarrollar en el foro de construcción colectiva los cálculos para losejercicios de
la unidad 2 planteados en el foro del trabajo colaborativo.
Se hicieron lograron hacer prácticas en los programas propuestos por el tutor(Mat Lab).
Nos hemos socializado con el módulo de control y hemos dejado términosclaros y podemos
Saber más fácilmente el porqué de algunas expresiones empleadas en elmodulo
Hemos descubierto los elementos del control que eran indiferentes a primeravista en cuanto
a lo que se refiere a los componentes que constituyen la descripción de controlautomático
Se identificaron las variables en los sistemas y las relacionamos con las teoríasde solución
Para sistemas de control análogo • Solucionamos mediante fórmulas,problemáticas Presentadas en procesos de control
Conocimos y entendimos el funcionamiento del aplicando las teorías del controlanalógico y las actividades propuestas en el módulo desarrollando los objetivospropuestos