lugar geometrico de las raices control
13
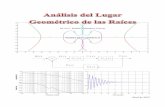
Universidad de Navarra Nafarroako Unibertsitatea Escuela Superior de Ingenieros Ingeniarien Goi Mailako Eskola ASIGNATURA GAIA CURSO KURTSOA Ingeniería de Control I 4º NOMBRE IZENA FECHA DATA 29 de enero de 2003 PRIMERA PARTE . 1 . La función de transferencia de una planta es: 1 () ( 2)( 4) Gs ss s = + + Su diagrama del Lugar de las Raíces es: -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 -3 -2 -1 0 1 2 3 Root Locus Real Axis Imaginary Axis
-
Upload
roberto-vazquez -
Category
Documents
-
view
850 -
download
2
Transcript of lugar geometrico de las raices control

U n i v e r s i d a d d e N a v a r r a N a f a r r o a k o U n i b e r t s i t a t e a E s c u e l a S u p e r i o r d e I n g e n i e r o s I n g e n i a r i e n G o i M a i l a k o E s k o l a
ASIGNATURA GAIA CURSO KURTSOA
Ingeniería de Control I 4º NOMBRE IZENA FECHA DATA 29 de enero de 2003
PRIMERA PARTE
. 1 . La función de transferencia de una planta es:
1( )( 2)( 4)
G ss s s
=+ +
Su diagrama del Lugar de las Raíces es:
-8 -7 -6 -5 -4 -3 -2 -1 0 1 2
-3
-2
-1
0
1
2
3
Root Locus
Real Axis
Imag
inar
y Ax
is

Su diagrama de Bode es:
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Phas
e (d
eg)
-150
-100
-50
0
50M
agni
tude
(dB)
Bode Diagram
Frequency (rad/sec)
Se pide:
a) Elegir razonadamente una ganancia para el sistema en el diagrama del Lugar de las Raíces y otra en el diagrama de Bode y compararlas.
b) Calcular por el criterio de Routh la ganancia crítica del sistema y, con ella, la
ganancia proporcional que sugiere Ziegler-Nichols. Comparar esta ganancia con las ganancias anteriores.

Solución: a) Se elige un amortiguamiento de 0.7, es decir, un margen de fase de unos 70º.
-8 -7 -6 -5 -4 -3 -2 -1 0 1 2
-3
-2
-1
0
1
2
3
Imag
inar
y Ax
is
3.3 1.4 1.05 4.85K = × × = (0.5 ptos.)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Phas
e (d
eg)
-150
-100
-50
0
50
Mag
nitu
de (d
B)
20log 13.2K =
4.58K = (0.5 ptos.)
ζ=0.7
3.3 1.05
1.4
13.2 dB
70º

b) Se calcula la expresión de la ecuación característica en lazo cerrado:
( 2)( 4) 0s s s K+ + + = 3 26 8 0s s s K+ + + =
Se aplica el criterio de Routh:
3
2
0
1 86
486
sKs
Kss K
−
48CRK =
0.5 24ZN CRK K= = (0.5 ptos.)

. 2 . Dibujar el diagrama de bloques correspondiente al siguiente controlador PID:
1( ) ( )p ref ref DI
dyu K by y y y dt TT dt
= − + − −
∫
Solución: Expresión del PID en Laplace:
( ) ( )( ) ( ) ( ) ( )ref
p ref DI
y s y sU s K bY s Y s T sY s
sT−
= − + −
Operando de forma sencilla:
−
+Yref Up
I
KT s
pK
+
D pT K s
+
−Y
−
+b
(1.5 ptos.)
. 3 . Secuencia de comandos en Matlab para dibujar el lugar de las raíces de:
( )( ) ( )2
4 3 2 2 3 2
12 3 4 5 2 3 1
s ss s s s s s s s s
+ ++ + + + + + + + +
Solución: n = [1 1 1]; d = conv([1 2 3 4 5],conv([1 2 3],[1 1 1 1])); rlocus(n,d); (1 pto.)

. 4 . Dados los siguientes dos sistemas controlados: Sistema 1:
−
+ 11s+
R CK2
N++
K1
Sistema 2:
−
+ 11s+
R CPI
N++
a) Determinar los valores de K1 y K2 para que el Sistema 1 tenga error nulo en régimen permanente y una constante de tiempo de 0.1 segundos
b) Determinar las constantes del PI, en el Sistema 2, para que la respuesta sea
la misma que en el apartado anterior. La ecuación de este controlador es:
1( ) 1 ( )pI
u s K e sT s
= +
NOTA: Se recomienda cancelar el polo de la planta con el cero del PI, y ajustar la ganancia del sistema resultante.
c) Al cabo de 10 segundos hay una perturbación de tipo escalón de amplitud 3.
Determinar el error en régimen permanente para cada sistema.

Solución: a) Expresión de la función de transferencia en lazo cerrado del Sistema 1:
2
2 11
2 2
1( 1)1
1
KK KC s KKR s K
s
+= =+ ++
+
Usando el valor de la constante de tiempo:
2
1 1 0.11K
τσ
= = =+
2 9K = (0.33 ptos.)
Error del Sistema 1 ante una entrada escalón unitario, que se quiere hacer nulo:
1 1
0 0
9 91lim( ( ) ( )) lim ( ( ) ( )) lim 1 1 010 10t s s
K Ke r t c t s R s C s ss s→∞ → →
= − = − = − = − = +
1109
K = (0.33 ptos.)
Con esto, la función de transferencia en lazo cerrado queda: 10
10CR s
=+
b) Expresión de la función de transferencia del controlador: 1
11 Ic p p
I
sTG K K
T s s
+
= + =
Para cancelar el polo de la planta, el tiempo de integración debe valer: 1 1IT
=
1IT = (0.33 ptos.)
La función de transferencia en lazo cerrado queda entonces:
10101
p
p
p p
KKC s
KR s K ss
= = =+ ++
10pK = (0.33 ptos.)
c) Cálculo de los errores demandados:
0 0
13 31lim( ( )) lim ( ( )) lim 9 101
1t s s
se c t s C s ss
s→∞ → →
+= − = − = − = − + +
(0.33 ptos.)
0 0
13 31lim( ( )) lim ( ( )) lim 01 11 10
1t s s
se c t s C s s s ss s
→∞ → →
+= − = − = − = − = + ∞ + +
(0.33 ptos.)

U n i v e r s i d a d d e N a v a r r a N a f a r r o a k o U n i b e r t s i t a t e a E s c u e l a S u p e r i o r d e I n g e n i e r o s I n g e n i a r i e n G o i M a i l a k o E s k o l a
ASIGNATURA GAIA CURSO KURTSOA
Ingeniería de Control I 4º NOMBRE IZENA FECHA DATA 29 de enero de 2003
SEGUNDA PARTE
. 1 . Ajustar, por el método del Lugar de las Raíces el compensador de la figura, de tal forma que los polos en lazo cerrado queden situados en -2 ±√2 j.
−
+2
12 2s s+ +
R C( )K s a+

Solución: La posición de los polos de la planta es la que muestra la figura. El ángulo que debe aportar el polo es el exceso a 180º de los polos de la figura. Es decir:
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Los ángulos son:
( )1 180º arctg 2 1 157.5ºθ = − − =
( )2 180º arctg 2 1 112.5ºθ = − + =
1 2 180º 112.5º 157.5º 180º 90ºθ θ+ − = + − = Por tanto, faltan 90º que debe aportar el cero. El cero está justo en la vertical. Por tanto:
a=2 (1 pto.)
Para calcular la ganancia se aplica el criterio del módulo:
( ) ( )2 22 2
1 21 2 1 1 2 1
22z
d dKd
+ − + += = = (1 pto.)
Aunque no se pide, el lugar de las raíces de la planta con el controlador es el siguiente. Root Locus
Imag
Axi
s
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5

. 2 . La figura 1 muestra una máquina de control numérico que debe seguir una posición de referencia con un error inferior a 2mm como muestra la figura 2. La velocidad máxima de referencia de posición es de 1 m/s.
xref
t
2 mm
Figura 2
Los parámetros de la máquina son: M = 1 Kg y C = 6 Ns/m
−
+2
1Ms Cs+
Gcxref x
Determinar un compensador de retraso de fase adecuado para el sistema. El sistema debe tener un comportamiento transitorio razonable. NOTA 1: La referencia de posición se puede tomar como una rampa. NOTA 2: Por seguridad, la ganancia del controlador a bajas frecuencias debe ser finita, es decir, no puede tener un polo en el origen.
Figura 1

Solución (usando el lugar de las raíces): Se va a calcular el compensador de retraso de fase por el método del lugar de las ráices. El compensador tendrá como ecuación:
cs aG Ks b
+=+
con a y b cercanos a cero y a mayor que b. En primer lugar se busca una posición adecuada para los polos en lazo cerrado. Se ha elegido un amortiguamiento de 0.7, como muestra la fugura.
Root Locus
Real Axis
Imag
Axi
s
-6 -5 -4 -3 -2 -1 0
-3
-2
-1
0
1
2
3
La ganancia correspondiente a estos puntos es:
3 2 3 2 18K = = (1 pto.)
La frecuencia natural es de
3 2 4.24 /n rad sω = = El error ante la entrada rampa de 1 m/s debe ser de 0.002 m. La expresión del error ante una entrada rampa es:
( )20
1lim 0.0021limt
BFs
C b Ce t s a K a KsKs b Ms Cs
→∞
→
= = = =++ +
De esta fórmula se deduce que la ganancia a baja frecuencia debe ser: 1 3000
6·0.002BFaK Kb
= = =
El compensador de retraso debe aumentar la ganancia a baja frecuencia respecto a alta frecuencia 3000/18, es decir, 166.6. Para que no afecte mucho al transitorio el cero se sitúa a una frecuencia entre 2 y 10 veces menos que la frecuencia natural de los polos dominantes en lazo cerrado. Por tanto:
0.43 2.21a< < (.25 ptos.)
Tomamos a =1. Para este valor de a el valor de b, será:
1 0.006166.6 166.6ab = = = (.5 ptos.)

El compensador de retraso será:
1180.006csG
s+=
+ (.25 ptos.)

Solución (usando el diagrama de Bode): El diagrama de Bode de la planta es:
Bode Diagram
Frequency (rad/sec)
Phas
e (d
eg)
Mag
nitu
de (d
B)
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
100 101 102-180
-135
-90
Si se escoge un margen de fase adecuado (60º por ejemplo), la ganancia del sistema para conseguir ese margen de fase, usando el diagrama es 27.5 dB. En magnitud absoluta, la ganancia será:
K = 23.71 (1 pto.)
La frecuencia de cruce de ganancia es de 3.4 rad/s. Por tanto la posición del cero del compensador será, aproximadamente entre 2 y 10 veces menor:
0.34 1.7a< < (.25 ptos.)
Eligiendo k = 1, el resto del ejercicio se hace de forma análoga al método del lugar de las raíces. La ganancia a baja frecuencia debe aumentar: 3000/23.71, es decir, 126.5 veces más. Tomamos a =1. Para este valor de a el valor de b, será:
1 0.07921 21ab = = = (.5 ptos.)
El compensador de retraso será:
123.710.079csG
s+=
+ (.25 ptos.)