Lugar geometrico de las raices
39
Para que un sistema de control sea útil, lo primero que debe cumplir es que sea estable. Si el sistema es inestable no existe régimen permanente. Por tanto, asegurar la estabilidad del sistema debe ser un paso previo al cálculo numérico de los errores en régimen permanente. ESTABILIDAD
-
Upload
shibufabian -
Category
Documents
-
view
20 -
download
1
description
Introducción al lugar geométrico de las raices
Transcript of Lugar geometrico de las raices
Para que un sistema de control sea útil, lo primero que debe cumplir es que sea estable. Si el sistema es inestable no existe régimen permanente.Por tanto, asegurar la estabilidad del sistema debe ser un paso previo al cálculo numérico de los errores en
régimen permanente.
ESTABILIDAD
DEFINICIÓN DE ESTABILIDAD
Se dice que un sistema es estable cuando:• La respuesta del sistema al impulso tiende a cero cuando el tiempo tiende a infinito.• Ante una entrada finita le corresponde una salida también finita.
Se estudió, en capítulos anteriores que la localización de los polos de la función de transferencia resultaba crucial en el régimen transitorio del sistema.
Por tanto, no es de extrañar que la estabilidad del sistema pueda estar condicionada también por los
polos del sistema.

Es posible deducir de la tabla de transformadas de Laplace que:
para que un sistema sea estable todos los polos deben estar localizados en el semiplano de S de
parte real negativa. Evidentemente, esto se cumple cuando todos los polos tienen parte real negativa.Los polos del sistema son las raíces de la ecuación que resulta de igualar a cero el denominar de la función de transferencia del sistema. Esa ecuación se conoce con el nombre de ecuación característica del sistema. Por tanto, las raíces de la ecuación característica nos ofrecen información no sólo del transitorio del sistema, sino también de su estabilidad.
CRITERIO DE ROUTH-HURWITZ
Conocer las raíces de la ecuación característica, para comprobar si las partes reales de todas ellas son negativas y asegurar así que el sistema es estable, es difícil cuando el orden del sistema es superior a dos. El problema se incrementa si además, los coeficientes de la ecuación no son valores numéricos, sino que dependen de algún parámetro variable.
El criterio de Routh-Hurwitz aplicado a la ecuación característica de un sistema permite conocer si es
estable o no, sin necesidad de calcular las raíces de dicha ecuación característica.
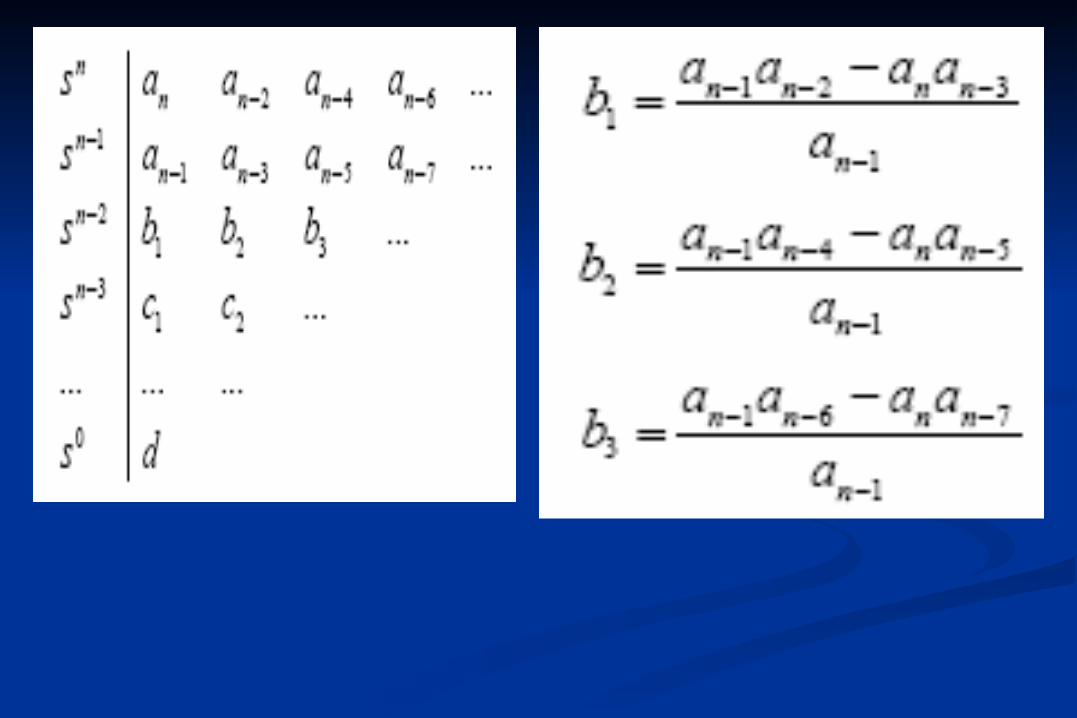
Primero se comprueba que todos los coeficientes ai sean positivos. Si hubiese algún coeficiente nulo o negativo, el sistema no sería estable.Si se cumple la condición anterior, que se conoce como condición de Cardano-Viète, el sistema puede ser estable o no. Para comprobar si es estable, se disponen los coeficientes ai de forma que sigan el patrón impuesto por la siguiente tabla:

Donde los coeficientes ai se distribuyen en las dos primeras filas. Los coeficientes de las sucesivas filas se calculan empleando los coeficientes de las dos columnas inmediatamente superiores. Así los coeficientes bi se calculan como sigue:

A partir de un momento, los coeficientes de las filas valen sucesivamente cero.
Estos ceros a veces son necesarios para calcular coeficientes posteriores. Se puede observar que el cálculo de los coeficientes sigue un patrón que se puede memorizar. El denominador siempre es el primer coeficiente de la fila inmediatamente superior.
El numerador depende de los coeficientes de las dos filas inmediatamente superiores y es la diferencia de dos productos cuyos términos poseen una posición cruzada.
Para sucesivos coeficientes, los dos primeros términos siempre se emplean en el producto cruzado, mientras que los otros dos van avanzando.

El proceso acaba cuando se calcula la fila de coeficientes en s0, que sólo posee un
coeficiente no nulo, d en la tabla.

El criterio afirma que
el sistema es estable si y sólo si todos los coeficientes de la primera columna de
Routh-Hurwitz son positivos.
Es, por tanto, una condición necesaria y suficiente. La primera columna la forman los primeros coeficientes de todas las filas.
Aunque el criterio sólo se fije en los primeros coeficientes, las filas hay que completarlas enteras, porque todos los coeficientes son necesarios para calcular los inferiores.

Cuando no se cumple el criterio de Routh-Hurwitz, es posible conocer el número de polos del sistema que están en el semiplano de parte real positiva.
Existen tantos polos con parte real positiva comocambios de signo aparecen a la largo de la primera
columna de Routh-Hurwitz.
Es importante recalcar que criterio de Routh-Hurwitz informa sobre la estabilidad absoluta, es decir, se limita a mostrar si el sistema es estable o no, sin indicar el grado de estabilidad o inestabilidad, lo próximo o lo alejado que se está de volverse inestable o estable.
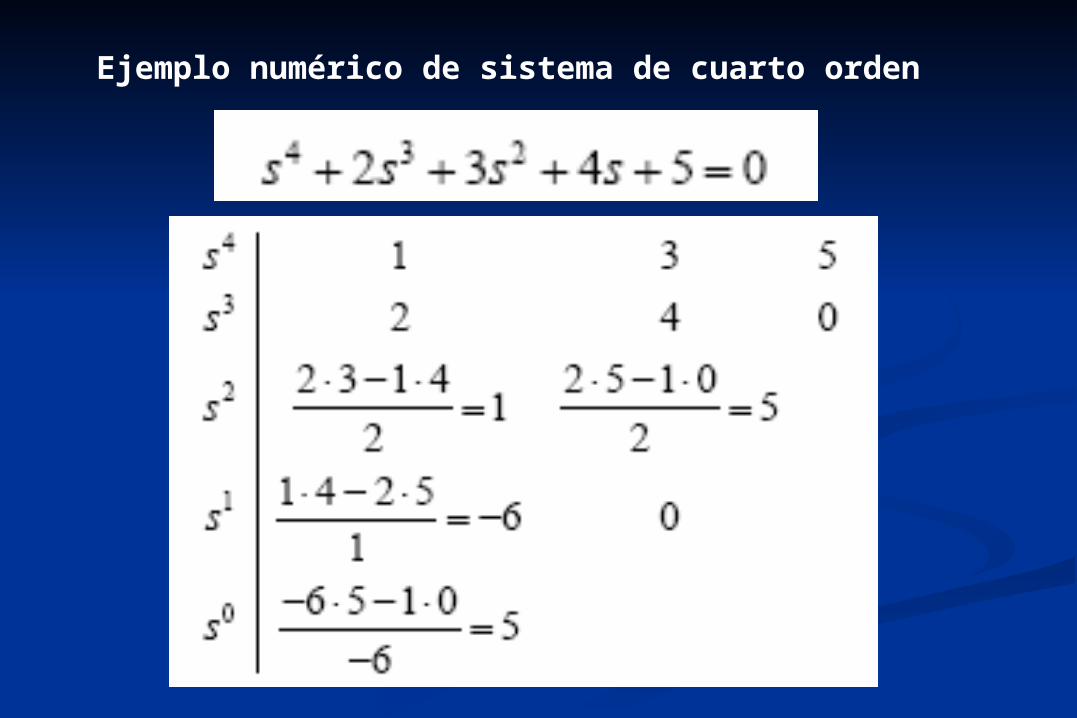
Ejemplo numérico de sistema de cuarto orden

Todos los coeficientes de la primera columna son positivos
menos uno que es negativo, por tanto el sistema es inestable.
Asimismo, existen dos cambios de signo en la columna, por tanto existen dos raíces con parte real positiva.

CASOS ESPECIALES DEL CRITERIO DE ROUTH-HURWITZ
La confección de la tabla de Routh-Hurwitz puede ser imposible en varios casos, por ejemplo cuando algunode los denominadores de los coeficientes se hace nulo.
En los siguientes apartados se presenta el modo de actuar para el caso de las dos situaciones especiales más frecuentes.

Se anula el primer coeficiente de una fila
Si existe un cero en la primera posición de una fila, todos los coeficientes de la fila inmediatamente inferior se hacen infinitos. Para evitar esta situación, se puede sustituir
el coeficiente nulo por una constante positiva ε muy próxima a cero. Esta constante se arrastra en el cálculo de los siguientes
coeficientes y permite estudiar el signo de todos ellos.
Como ejemplo se puede observar qué ocurre cuando la ecuación característica es:

Pero si se construye la tabla de Routh-Hurwitz:
No cumple la condición de Cardano-Viète, por la que ya se puede afirmar que el sistema es inestable.
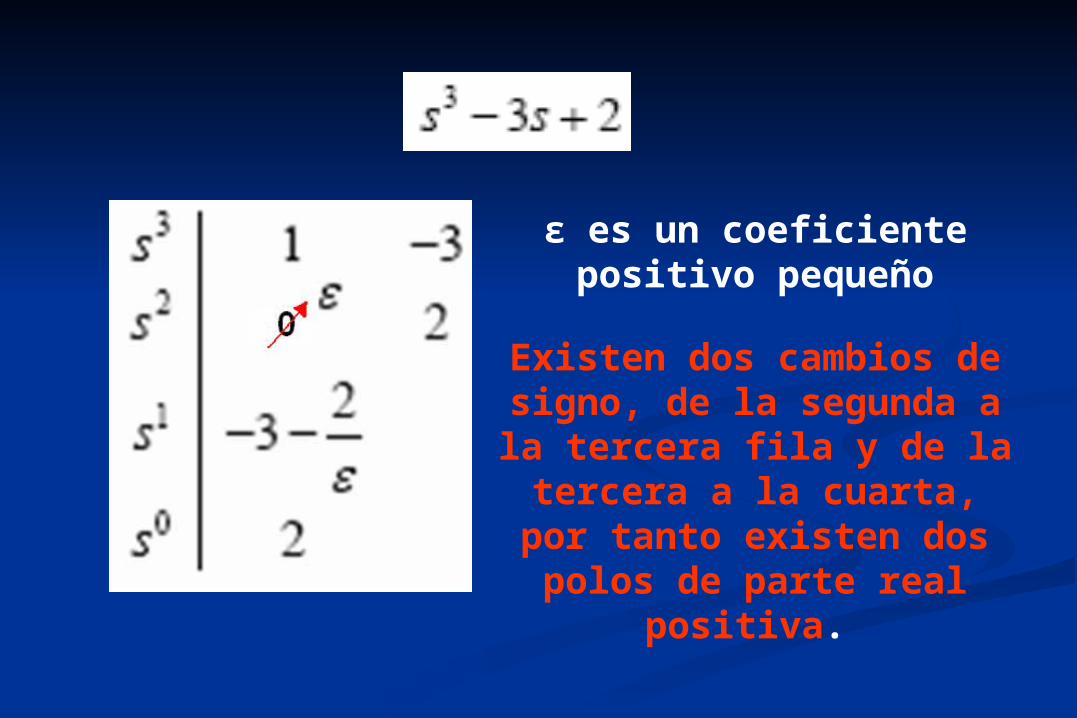
ε es un coeficiente positivo pequeño
Existen dos cambios de signo, de la segunda a la tercera fila y de la
tercera a la cuarta, por tanto existen dos polos de parte real positiva.

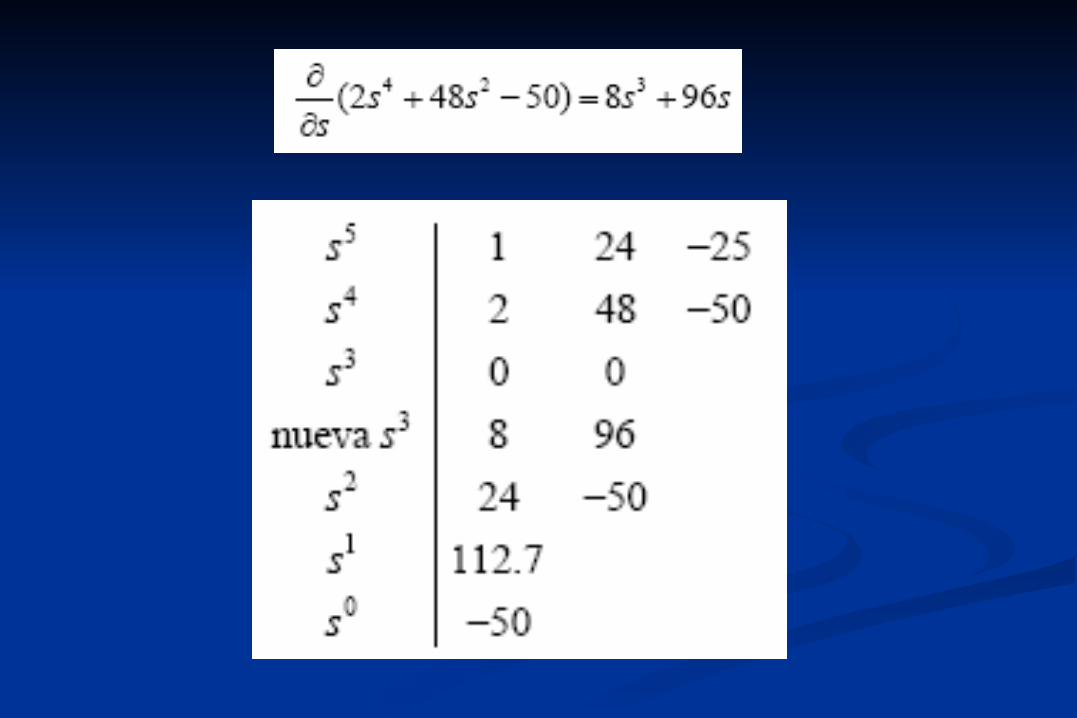
Se anula toda una fila
Cuando se anula toda una fila de la tabla de Routh-Hurwitz. Se avanza, resolviendo la ecuación que se construye con la fila superior a la nula, es decir, el último renglón no nulo.Como ejemplo, se puede observar cómo se obtienen esas raíces peculiares en la siguiente ecuación característica:


Toda la fila en s3 es nula. Con los coeficientes de la fila inmediatamente superior no nula, la fila en s2, se construye la ecuación mostrada a continuación: llamada ecuación auxiliar. Donde la nueva fila en s3 se obtiene derivando respecto
de s el polinomio de la ecuación auxiliar:

Para que el sistema sea estable, K debe pertenecer
al intervalo (0,6).
Establecer condiciones para que todos los coeficientes de la primera columna de la tabla sean positivos.

El primer coeficiente de la fila en s2 es positivo si se cumple que:

El primer coeficiente de la fila en s1 es positivo en los siguientes intervalos de K:
El primer coeficiente de la fila en s0 es positivo si se cumple que:
Combinando las tres condiciones para que todos ellos a la vez sean positivos, se tiene que el sistemasea estable si K pertenece al intervalo:
LUGAR DE LAS RAÍCES
INTRODUCCIÓN
En labores de diseño es interesante conocer cómo varía la ubicación de los polos del sistema en función de un parámetro que el ingeniero pueda modificar a su arbitrio.
Con esta información se puede saber qué especificaciones de régimen transitorio se pueden imponer en la respuesta del sistema.
Habitualmente el parámetro de diseño es una ganancia proporcional dentro del lazo de control.

El método del lugar de las raíces ideado en 1948 por el norteamericano Walter Richard Evans (1920-1999),
permite conocer la estabilidad relativa de los sistemas de control, y también obtener de forma gráfica la localización de los polos del sistema sin tener que
realizar su cálculo numérico.
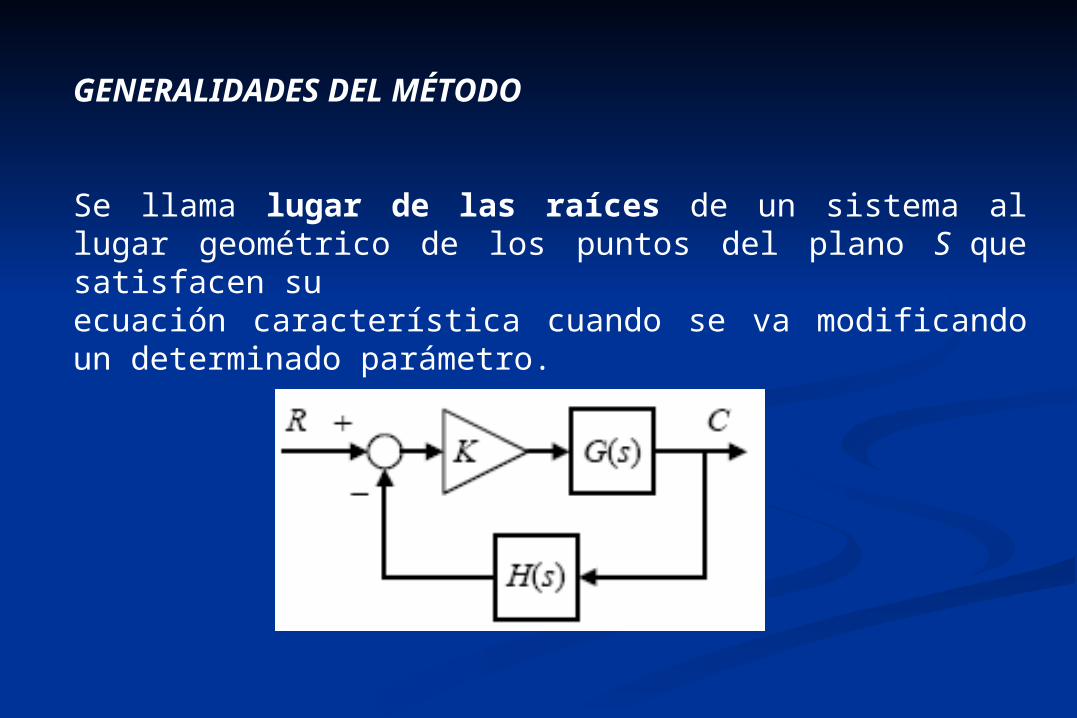
GENERALIDADES DEL MÉTODO
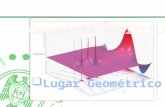
Se llama lugar de las raíces de un sistema al lugar geométrico de los puntos del plano S que satisfacen suecuación característica cuando se va modificando un determinado parámetro.
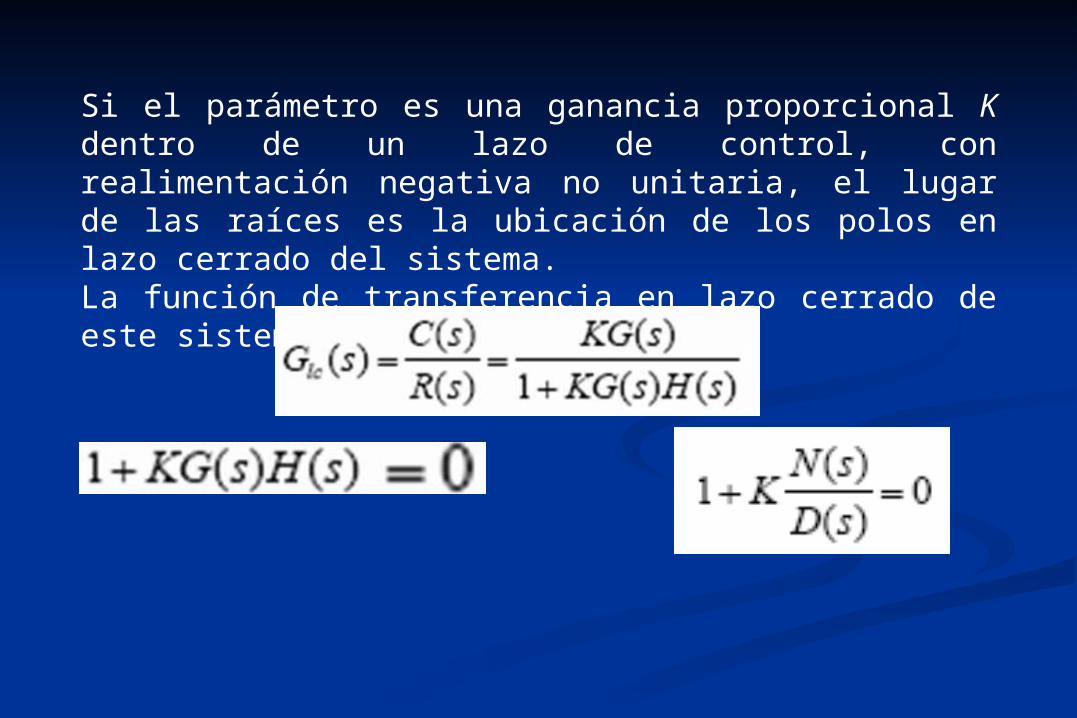
Si el parámetro es una ganancia proporcional K dentro de un lazo de control, con realimentación negativa no unitaria, el lugar de las raíces es la ubicación de los polos en lazo cerrado del sistema.La función de transferencia en lazo cerrado de este sistema es:

Lugar Geométrico Lugar Geométrico de Raícesde Raíces
GUIA PARA CALCULARLOGUIA PARA CALCULARLO
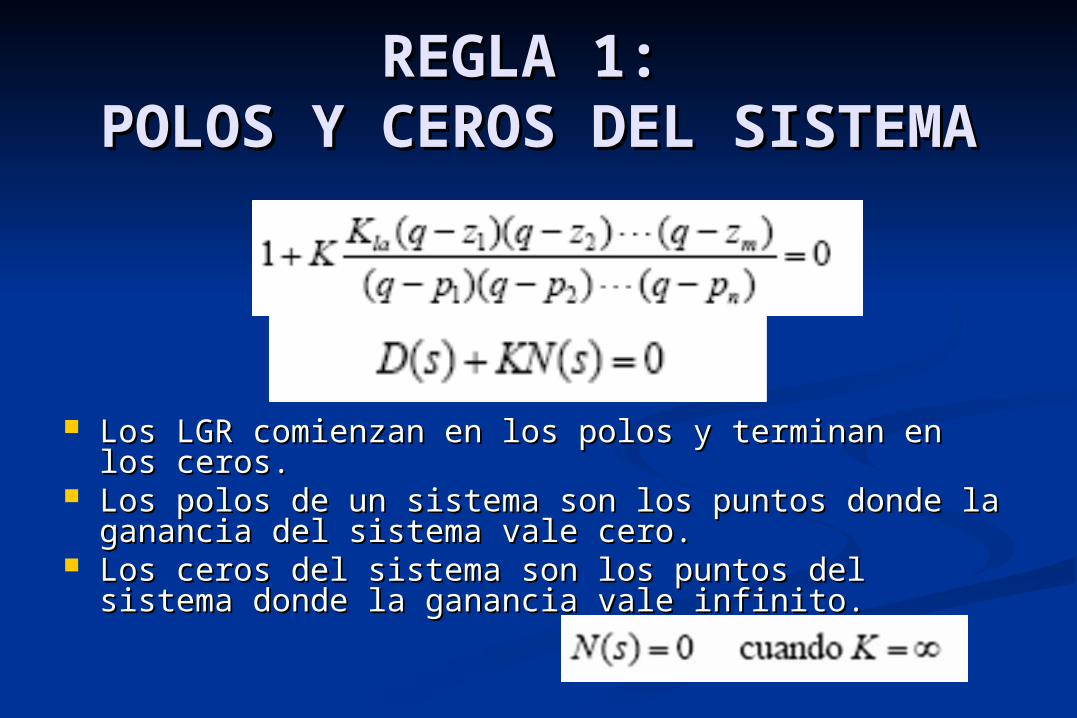
REGLA 1: REGLA 1: POLOS Y CEROS DEL POLOS Y CEROS DEL
SISTEMASISTEMA
Los LGR comienzan en los polos y terminan en los Los LGR comienzan en los polos y terminan en los ceros.ceros.
Los polos de un sistema son los puntos donde la Los polos de un sistema son los puntos donde la ganancia del sistema vale cero.ganancia del sistema vale cero.
Los ceros del sistema son los puntos del sistema donde Los ceros del sistema son los puntos del sistema donde la ganancia vale infinito. la ganancia vale infinito.

El LGR existe en el eje real solamente a la izquierda de El LGR existe en el eje real solamente a la izquierda de un numero impar de polos reales y ceros. un numero impar de polos reales y ceros.
La grafica del LGR, es simétrica respecto al eje real La grafica del LGR, es simétrica respecto al eje real porque las raíces ocurren en pares conjugados.porque las raíces ocurren en pares conjugados.
REGLA 2: ESTABLECER LA REGLA 2: ESTABLECER LA EXISTENCIA DEL LGREXISTENCIA DEL LGR
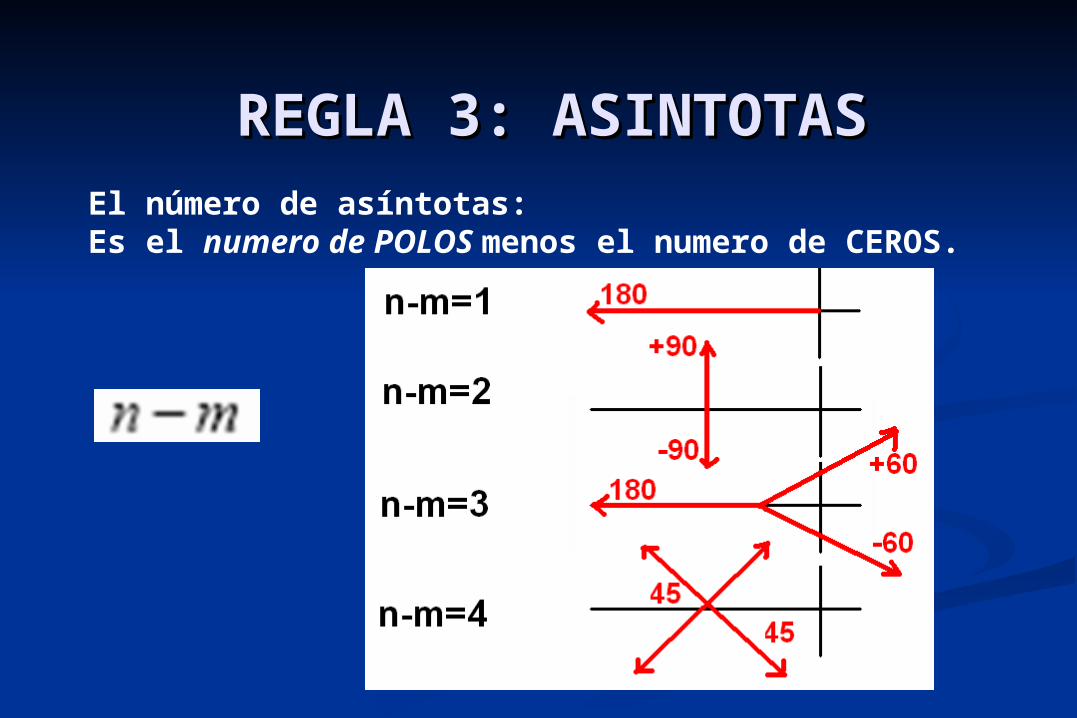
El número de asíntotas:Es el numero de POLOS menos el numero de CEROS.
REGLA 3: ASINTOTASREGLA 3: ASINTOTAS

Los ángulos que forman las asíntotas respecto al eje real son:
Punto donde comienzan las asíntotas:Todas las asíntotas se cortan en un único punto del eje real, que se calcula de la forma:
En un punto del lugar de las raíces se pueden juntar varios polos del sistema. Se juntan siguiendo una dirección y se separan siguiendo otra diferente. Son los llamados puntos de ruptura y se buscan entre las raíces de la ecuación:
REGLA 4: PUNTOS DE SEPARACION REGLA 4: PUNTOS DE SEPARACION CON EL EJE REALCON EL EJE REAL

Sólo las raíces de la ecuación,
que pertenezcan al lugar de las raíces son puntos de ruptura del mismo.
Como lo habitual es que los puntos de ruptura aparezcan en el eje real, es suficiente comprobar si las raíces se encuentran dentro de los tramos del eje real que pertenecen al lugar de las raíces.

Para encontrar los puntos del lugar de las raíces que cortan el eje imaginario se emplea el criterio de Routh-Hurwitz o también el método de SUSTITUCION DIRECTA (S=JW).Si se emplea el criterio de Routh-Hurwitz:Primero se encuentra la ganancia crítica del sistema, si existe. Posteriormente se sustituye este valor en la tabla del método de Routh-Hurwitz.Se anulará una de las filas de la tabla y, con la fila inmediatamente superior, se construye el polinomio auxiliar en s, cuyas raíces son los puntos de corte con el eje imaginario.
REGLA 5: PUNTOS DE INTERSECCION CON REGLA 5: PUNTOS DE INTERSECCION CON EL EJE IMAGINARIOEL EJE IMAGINARIO

Es el ángulo con que salen las ramas del lugar de las raíces desde los polos y el ángulo con que llegan a los ceros. Para ello se aplica la condición del argumento en un punto q muy próximo al polo o cero objeto de estudio.
Esta condición se puede leer como: “la suma de los ángulos vistos desde los ceros menos la suma de los ángulos vistos desde los polos es igual a 180º o un ángulo equivalente”.
REGLA 6: ANGULOS DE PARTIDA O REGLA 6: ANGULOS DE PARTIDA O LLEGADALLEGADA

Los polos del sistema son las raíces del denominador,
es decir:
muestra el lugar que van ocupando estos polos, variando K entre cero e
infinito.