FLEXIÓN DESVIADA Y COMPUESTA
19
x y M x M y M x M y x y I xy = Z A xy dA =0 M x = M y =0 N 6=0 σ z σ σ = N/A N =0 M y =0 M x =0 M y =0 σ(y)= - M x I x y M x =0 σ(x)= M y I y x
-
Upload
hircow-fabian-ruiz-paredes -
Category
Engineering
-
view
54 -
download
1
Transcript of FLEXIÓN DESVIADA Y COMPUESTA

FLEXIÓN DESVIADA Y COMPUESTA
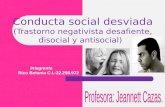
Trataremos en este capítulo el caso general de una viga cuando está sometida a esfuerzosde directa y �exión. En este análisis no consideraremos la existencia de torsión y cortante. Lassolicitaciones de la barra estarán referidas a un sistema de ejes baricéntricos como los indicados enla �gura 1. La directa que llamaremos N será la resultante según el eje z. Será positiva cuando seade tracción y negativa si es de compresión. El momento �ector, que estará referido al baricientro dela sección será descompuesto en dos vectores uno según el eje x y otro según el eje y cuyos módulosdesignaremosMx yMy. Los signos serán de�nidos, empleando la regla de la mano derecha. En estascondiciones la solicitación queda de�nida por tres escalares N, Mx y My.
Figura 1: De�nición de los ejes de una barra
Consideraremos además que los ejes x e y son los ejes principales de la sección. De esta forma:
Ixy =
∫A
xy dA = 0
1. Introducción
Para el análisis se pueden distinguir tres casos.Un primer caso es cuando Mx = My = 0 y solo existe N 6= 0 . Este caso es el de una directa
pura. Es muy sencillo y ya fue analizado. En toda la sección se producen tensiones constantes σzque en lo sucesivo denominaremos σ para simpli�car la notación, que son: σ = N/A. Donde A es lasuper�cie de la sección. En este caso, es conocido que no existe línea neutra.
Un segundo caso es cuando N = 0. De este segundo caso fueron ya estudiadas las situacionesparticulares cuando uno de los dos momentos es igual a cero (My = 0 o Mx = 0). En la situaciónparticular de que no existiera �exión según y, es decir My = 0 la tensión normal será:
σ(y) = −Mx
Ixy (1)
Análogamente la otra situación particular es cuando Mx = 0 resultando que:
σ(x) =My
Iyx (2)
1

El signo negativo aparece en la primera expresión pues un momento positivo Mx producecompresiones para y ≥ 0. En la situación particular (Mx = 0) el signo es positivo pues un momentopositivo My produce tracciones para x ≥ 0.
La situación más general en este segundo caso es cuando actúan los dos momentos Mx y My
mientras que N = 0. Esta solicitación es conocida como �exión desviada y será estudiada en estecapítulo.
Un tercer caso es cuando N 6= 0 y además existen momentos de �exión. Este caso es conocidocomo �exión compuesta y será estudiado también en este capítulo.
2. Flexión desviada
2.1. Formulación del problema
El caso general de �exión desviada (en la que no hay directa) es cuando existe un momentoaplicado a la barra con cualquier dirección de aplicación en el plano de�nido por los ejes coordenadosx e y , como se indica en la �gura 2.
Figura 2: Descomposición de un momento desviado aplicado a una barra
En estas condiciones
Mx = M · cosα (3)
My = M · senα (4)
Las tensiones producidas por M pueden determinarse superponiendo el efecto de ambosmomentos, en un punto genérico de la sección de la barra de coordenadas (x, y) serán entonces:
σ(x, y) = −Mx
Ixy +
My
Iyx
⇒ σ(x, y) = M
(−cosα
Ixy +
sinα
Iyx
)(5)
2.2. Cálculo de la línea neutra:
La condición que de�ne si un punto pertenece a la línea neutra es σ(x, y) = 0, en consecuencia:
−cosα
Ixy +
sinα
Iyx = 0 (6)
⇒ y =IxIy
tanαx (7)
tanβ =IxIy
tanα (8)
Notar que en todas las situaciones posibles el baricentro de la sección G de coordenadas (0, 0)cumple que G ∈ LN .
Estamos de�niendo en la expresión anterior β como el ángulo que forma la línea neutra con eleje de las x considerado en el mismo sentido que el ángulo α, o sea en sentido horario. Ver �gura 3.
Los ángulos α y β en general no serán iguales, pero en algunos casos particulares lo son, podemosmencionar los siguientes casos:
2

Figura 3: Línea Neutra
Si Ix = Iy ya que entonces tanα = tanβ. Esto se da por ejemplo en el caso de seccionescirculares o cuadradas.
Si α = 0 ya que en este caso β = 0 y M = Mx
Si α = Π2 ya que entonces tanα =∞ y entonces tanβ =∞ �nalmente β = Π
2
En el primer caso los ángulos coinciden para todo valor de α.Las dos últimas situaciones se dan cuando la �exión es según uno de los ejes principales, lo que
ya era conocido del curso de Resistencia de Materiales 1.
3

3. Flexión Compuesta
3.1. Formulación del problema
Si existe además de un momento, una directa aplicada a la barra (N 6= 0), las solicitacionespueden superponerse y la expresión que describe la distribución de tensiones en la sección es lasiguiente:
σ(x, y) = −Mx
Ixy +
My
Iyx+
N
A(9)
De�niremos entonces
a =My
Iy
b = −Mx
Ixy
c =N
A
Un punto P de la sección puede ser identi�cado por sus coordenadas xP e yP . Hallamos latensión en ese punto como:
σ = axp + byp + c
La línea neutra de dicho estado será una recta que resulta de anular la tensión σ , cuya expresiónes:
ax+ by + c = 0 (10)
Teniendo en cuenta que la distancia, de un punto P genérico, a la línea neutra es:
d =axp + byp + c√
a2 + b2
Se concluye que σ(P ) = k · d siendok =√a2 + b2.
En conclusión:
σ(P ) = d
√(Mx
Ix
)2
+
(My
Iy
)2
(11)
Lo cual implica que para el caso general de �exión compuesta las tensiones son proporcionalesa la distancia a la línea neutra. Propiedad que ya se había observado en los casos particularesanteriormente estudiados.
3.2. Notación utilizando una fuerza excéntrica
Para analizar la �exión compuesta (que hasta este momento quedaba de�nida por tres escalares(N , Mx y My) haremos una modi�cación de los escalares que de�nen la �exión. Como en este casola directa es distinta de cero (N 6= 0) podemos de�nir dos nuevos parámetros (ex, ey) tales que:
ex = My/N
ey = −Mx/N
Luego la solicitación puede también expresarse por los escalares N , ex y ey que usaremos en losucesivo.
Puede observarse fácilmente que el estado de �exión compuesta es equivalente a una fuerza segúnz, de módulo N y sentido igual al de la directa, que se encuentra aplicada en un punto del planode la sección, de coordenadas (ex, ey), como se indica en la �gura 4.
Obsérvese que esta fuerza es en módulo y sentido igual a la directa. Sin embargo su punto deaplicación en general no es el origen de coordenadas de manera que como vectores fuerza no soniguales.
4

Figura 4: Carga F aplicada en (ex, ey)
Si sustituimos en la ecuación 9, obtenemos:
σ =MeyIx
y +NexIy
x+N
A=
⇒ σ =N
A
(1 +
exIyA
x+eyIxA
y
)
3.3. Línea Neutra
Recordando que los radios de giro se de�nen como:
ρ2y =
IyA
y
ρ2x =
IxA
Vemos entonces que:
σ =N
A
(1 +
exρ2y
x+eyρ2x
y
)(12)
La línea neutra de ese estado resulta de anular la tensión σ, y tiene la expresión:
1 +exρ2y
x+eyρ2x
y = 0 (13)
Podemos aceptar que no tiene sentido que los radios de giro sean cero. Asimismo sabemos queN 6= 0 pues estamos en un caso de �exión compuesta. Podemos también considerar, por la mismarazón, que la fuerza no está aplicada en el origen (con ex = ey = 0) pues estaríamos en un caso dedirecta pura que ya fue estudiado. Descartadas estas situaciones tendremos que la expresión 13 serásiempre una recta, o sea que en todo caso de �exión compuesta existe una línea neutra asociada.En la medida que la línea neutra no depende del módulo ni del sentido de la fuerza N se puedeconcluir que la línea neutra depende solamente de la ubicación de la carga (de�nida por ex y ey)y no de la magnitud de la misma. Asimismo se puede ver que la recta no pasa por el origen decoordenadas o baricentro de la sección, pues el punto x=y=0 no veri�ca la ecuación.
En conclusión, todo punto de coordenadas ex, ey (que no sea el baricentro de la sección), si loconsideramos como el punto de aplicación de la carga, tendrá una línea neutra asociada que no pasapor el origen.
Veremos a continuación que toda línea recta que no pasa por el origen tiene un punto deaplicación de la carga (que no es el baricentro) tal que al aplicar la carga en ese punto la generacomo su línea neutra.
5

Para ello consideraremos una recta genérica que no pasa por el origen de la forma
ax+ by + c = 0 (14)
Para que sea una recta deberá ser a 6= 0 o b 6= 0. Como además no pasa por el origen deberá serc 6= 0. Luego puedo dividir la ecuación 14 entre c, obteniendo.
a
cx+
b
cy + 1 = 0
Ambas rectas coinciden si se cumple que:
exρ2y
=a
c
yeyρ2x
=b
c
En consecuencia el punto correspondiente a la recta genérica elegida existe (pues c 6= 0) y suscoordenadas serán:
ex =a
cρ2y (15)
ey =b
cρ2x (16)
Teniendo en cuenta que a 6= 0 o b 6= 0 resulta que ex 6= 0 o ey 6= 0 con lo cual el punto no es elbaricentro.
3.4. Correspondencia biunívoca entre puntos de aplicación y líneas
neutras
De�niremos dos conjuntos, el primero A está compuesto por todos los puntos del plano,excluyendo al baricentro. El segundo B estará formado por todas las rectas del plano excluyendo aaquellas que pasan por el baricentro.
Como se vio anteriormente se puede asociar a cada punto P (perteneciente a A) consideradocomo el punto de aplicación de la carga que produce la �exión compuesta la recta p (pertenecientea B) que constituye la línea neutra de esa solicitación. Como ya se señaló todos los estados de�exión compuesta pueden ser representados por una fuerza aplicada en un punto perteneciente aA. Además para cada punto del conjunto A existe una recta del conjunto B y para cada recta deB existe un punto de A, de manera que esta es una correspondencia biunívoca.
Los puntos o rectas excluidos de estos conjuntos, no producen o no se corresponden a estadosde �exión compuesta. Una fuerza aplicada en el punto excluido (baricentro de la sección) produceuna directa pura. Una recta que pasa por el baricentro es la línea neutra de un estado de �exióndesviada.
En lo sucesivo la notación para designar rectas será p,q, etc y para designar puntos será P , Q,etc.
Dadas las coordenadas de un punto P de coordenadas (xP , yP ) tales que |xP |+ |yP | > 0, resultaque la recta que le corresponde es la recta p de ecuación
1 +xPρ2y
x+yPρ2x
y = 0 (17)
Dada la recta p de ecuación ax + by + c = 0 con c 6= 0 y |a| + |b| > 0 resulta que el puntocorrespondiente P tiene las coordenadas
xP =a
cρ2y (18)
yP =b
cρ2x (19)
6

3.5. Propiedades de la correspondencia de�nida
Esta correspondencia es una antipolaridad, algunos textos la tratan así. En este curso no vamosa encararlo así y nos limitaremos a continuación a ver algunas propiedades de la correspondenciade�nida que serán de utilidad para estudiar la �exión compuesta.
Teorema 1. Si Q ∈ p→ P ∈ qDemostraciónSean P = (xP , yP ) y Q = (xQ, yQ). Tenemos que
p) 1 +xPρ2y
x+yPρ2x
y = 0
Como Q ∈ p
→ 1 +xPxQρ2y
+yP yQρ2x
= 0 (20)
Por su parte
q) 1 +xQρ2y
x+yQρ2x
y = 0 (21)
Pero entonces P ∈ q pues la expresión resultante de sustituir las coordenadas de P en la ecuación21 es igual a la ecuación 20.
Teorema 2. Si P1, P2, ..., Pn están alineados → p1, p2, ..., pn pasan todas por el mismo punto (hazde rectas). Demostración P1, P2, ..., Pn están alineados P1, P2, ..., Pn ∈ q y entonces por el Teorema1 Q ∈ p1, Q ∈ p2, ..., Q ∈ pn o sea que todas las rectas pasan por Q.
Teorema 3. Si p1, p2, ..., pn pasan por Q entonces P1, P2, ..., Pn están alineados (todos pertenecerána q).
Teorema 4. Si P pertenece al eje x (o al eje y) entonces p⊥Ox (o p⊥Oy).Demostración
1 +xPρ2y
x+yPρ2x
y = 0
Pero yP = 0, entonces la recta p tiene la ecuación:
x = −ρ2y
xP
y en consecuencia es perpendicular al eje x.
Del teorema 4 se desprende, que al acercarse el punto al origen de coordenadas, la LN se alejarádel mismo, y viceversa. Se puede expresar el 4 de otra manera diciendo: Si una recta es paralela a
uno de los ejes de coordenadas, se corresponde con un punto que pertenece al otro eje.
Aplicación: ¾Cómo se puede hallar la recta s en función de un punto genérico S?Como vemos en la �gura 5, para hallar s en función de S debemos primero trazar las rectas p y
q y obtener sus puntos asociados P y Q respectivamente. La recta s estará de�nida por los puntosP y Q.
Aplicación: ¾Cómo se puede hallar el punto S en función de una recta genérica s?Como vemos en la �gura 5, para hallar S en función de s debemos primero hallar los puntos P
y Q y obtener sus rectas asociadas p y q respectivamente. El punto S será la intersección de estasdos rectas.
Teorema 5. Si las rectas p, q, r son paralelas (ninguna pasa por el origen)entonces los puntos P ,Q y R están alineados y la recta que los une pasa por el origen.Demostración
Si p, q y r fueran perpendiculares a alguno de los ejes de acuerdo al teorema 4 quedademostrada la tesis, pues la recta que los une es el mismo eje coordenado.
7

Figura 5: Determinación del punto asociado a una recta cualquiera
Si no lo son, sean:
p)apx+ bpy + cp = 0 (22)
q)aqx+ bqy + cq = 0 (23)
r)arx+ bry + cr = 0 (24)
Tal que cp 6= 0, cq 6= 0, cr 6= 0 (porque ninguna de las rectas pasa por el origen). Como ademásno son paralelas a ninguno de los ejes, todos los coe�cientes son diferentes de cero. Como lasrectas son paralelas entre si,
bpap
=bqaq
=brar
Como vimos anteriormente es posible hallar las coordenadas de los puntos P,Q y R como:
xP =apcpρ2y y yP =
bpcpρ2x
xQ =aqcqρ2y y yQ =
bqcqρ2x
xR =arcrρ2y y yR =
brcrρ2x
Vemos entonces que:
yPxP
=bpap
ρ2x
ρ2y
yQxQ
=bqaq
ρ2x
ρ2y
yRxR
=brar
ρ2x
ρ2y
=⇒ yPxP
=yQxQ
=yRxR
= constante =1
k(25)
En consecuencia todos los puntos pertenecen a la recta
y = kx (26)
(27)
que pasa por el origen.
Teorema 6. Cuando las rectas paralelas se alejan del baricentro, los puntos se acercan y cuandolos puntos se alejan del mismo, las rectas se acercan.
8

Si son paralelas a uno de los ejes coordenados, ya fue demostrado con el teorema 4. En el casoque no lo sean cortarán a los dos ejes coordenados y podemos razonar de la siguiente manera:
Si una recta está más cerca del origen que otra, sus puntos de corte con los ejes coordenadosestarán más cerca que los de la otra recta. Debido a lo anterior las rectas correspondientes a esospuntos de corte estarán mas lejos del baricentro que las que se corresponden con los puntos deintersección de la otra. Luego el punto que corresponde a la recta (que se obtiene intersectando lasdos rectas anteriores) estará mas lejos del baricentro que el que corresponde a la otra.
Para el caso de los puntos el razonamiento sería análogo.
3.6. Propiedad de los valores máximos de la tensión
Veremos como varían las tensiones cuando la carga se desplaza por un segmento de recta. Sobreello demostraremos que:
Teorema 7. Si una fuerza N se encuentra aplicada en un punto cualquiera C perteneciente alsegmento de recta de�nido por los puntos A y B y observamos la tensión que se produce en otropunto cualquiera P del plano tendremos que:
mın(σ(P,A), σ(P,B)) ≤ σ(P,C) ≤ max(σ(P,A), σ(P,B)) (28)
donde σ(P,A) es la tensión en el punto P cuando se aplica una fuerza N en el punto A
DemostraciónEs claro que:
mın(σ(P,A), σ(P,B)) ≤ σ(P,A) ≤ max(σ(P,A), σ(P,B)) (29)
mın(σ(P,A), σ(P,B)) ≤ σ(P,B) ≤ max(σ(P,A), σ(P,B)) (30)
y ademas que la fuerza en C se puede representar como una combinación lineal de una fuerzaen A y otra en B como puede observarse en la �gura 6
Figura 6: Descomposición de la fuerza en C en dos fuerzas (aplicadas en A y B) equivalentes
FuerzaN(C) = a× FuerzaN(A) + (1− a)× FuerzaN(B) (31)
9

Donde FuerzaN(A) es la fuerza N aplicada en A.Debido a que el punto C es interior al segmento se cumple que:
0 ≤ a ≤ 1
Teniendo en cuenta que una fuerza puede ser sustituida por dos que son equivalentes y que lastensiones en un punto cualquiera P pueden ser calculadas por superposición, se cumple que:
σ(P,C) = a× σ(P,A) + (1− a)× σ(P,B)
Pero multiplicando la desigualdad 29 por a y la desigualdad 30 por (1 − a) y sumando ambasdesigualdades se obtiene que
mın(σ(P,A), σ(P,B))×a+mın(σ(P,A), σ(P,B))×(1−a) ≤ σ(P,A)×a+σ(P,B)×(1−a) = σ(P,C)
(32)
y que
σ(P,A)×a+σ(P,B)×(1−a) = σ(P,C) ≤ max(σ(P,A), σ(P,B))×a+max(σ(P,A), σ(P,B))×(1−a)
(33)
Luego agrupando los terminos de la parte izquierda de la expresión 32, de la parte derecha dela expresión 33 y juntando ambas expresiones se obtiene que:
mın(σ(P,A), σ(P,B)) ≤ σ(P,C) ≤ max(σ(P,A), σ(P,B))
que es lo que queriamos demostrar.
Teorema 8. Cuando una carga varia por un segmento de recta, para veri�car las máximas tensionesde compresión o tracción en un punto cualquiera P , alcanza con calcular las tensiones en el puntoP con la carga aplicada en los extremos del segmento y tomar la alternativa mas desfavorable.
DemostraciónTeniendo en cuenta el teorema anterior resulta que las tensiones en un punto cualquiera P ,
cuando la carga se aplica en un punto intermedio del segmento toman valores intermedios a los quese producen cuando esta aplicada en cada extremo del segmento.
Luego las máximas tensiones (tanto de tracción como de compresión) se producen cuando lafuerza esta aplicada en los extremos del segmento. Por lo tanto alcanza con calcular las tensionesque se producen cuando las cargas estan aplicadas en los extremos del segmento y tomar en cadacaso la mas desfavorable.
4. Núcleo Central
4.1. De�nición
Sea S el conjunto de puntos que pertenece a la sección de una viga y sea Si el conjunto depuntos interiores de la sección o sea que pertenecen a la sección y no pertenecen a su contorno.
Se de�ne al Núcleo Central de una sección S como el conjunto de puntos P tales que p∩Si = ∅o que p no existe. (Es el caso de P = G. Es claro que al no haber línea neutra no hay intersecciónde esta con Si). Así de�nido el núcleo central la recta p puede no existir, ser exterior a la seccióno también puede ser tangente a la misma. Si la recta corta a la sección entonces el punto P nopertenece al núcleo central.
Sea una sección tal que G es su baricentro y los ejes x e y sean sus ejes principales. Si se colocala carga dentro de algún punto del Núcleo Central, entonces (en la medida que la línea neutra nocorta a la sección) toda la sección estará comprimida o traccionada dependiendo del signo de lafuerza N .
El núcleo central es un concepto muy relevante porque cuando el punto se encuentra fuera delnúcleo central la sección estará sometida a tracción y compresión simultáneamente. Cuando losmateriales tienen un comportamiento diferente a tracción que a compresión como es el caso del
10

Figura 7: Núcleo central
hormigón cobra mayor importancia este asunto. Mientras que a compresión el hormigón tiene unacapacidad resistente importante y poco variable a tracción su capacidad disminuye y además se hacemucho más variable. Normalmente se desprecia su capacidad resistente a tracción y debe hacerseun nuevo análisis (como se verá más adelante) para determinar el estado de tensiones. Esto haceparticularmente importante conocer la posición que tiene la línea neutra.
Por el contrario si el punto se encuentra en el núcleo central habrá solo tracción (si la directa esde tracción) y solo compresión (si la directa es de compresión).
4.2. Otras propiedades
Teorema 9. Si un punto P pertenece al núcleo central cualquier punto Q que esté alineando conP y G y que esté entre ambos pertenecerá también al núcleo central. (Ver �gura 8.)
En este caso las rectas p y q serán paralelas. Además la recta q estará más alejada del baricentroque la recta p. Luego si la recta p no cortaba a la sección la recta q tampoco la cortará y enconsecuencia Q pertenece también al núcleo central.
Teorema 10. Si un punto P no pertenece al núcleo central cualquier punto Q que este alineandocon P y G y que se encuentre mas allá del punto P no pertenecerá tampoco al núcleo central.
En este caso las rectas p y q serán paralelas. Además la recta q estará más cerca del baricentroque la recta p. Luego, si la recta p cortaba a la sección, la recta q también la cortará y en consecuenciaQ no pertenece tampoco al núcleo central.
Teorema 11. El núcleo central es convexo o sea dados dos puntos P y Q que pertenecen al núcleocentral, cualquier punto S que pertenezca al segmento PQ pertenece también al núcleo central.
Si tengo una fuerza aplicada en S puedo siempre descomponerla en dos fuerzas aplicadas enP y Q respectivamente donde esas fuerzas tienen el mismo sentido (tracción o compresión) quela fuerza aplicada en S. Luego las solicitaciones producidas por la fuerza en S pueden obtenersesuperponiendo dos fuerzas del mismo sentido aplicadas en P y Q. Como P y Q pertenecen alnúcleo central producirán solo tensiones en el mismo sentido en cualquier punto de la sección. Enconsecuencia el punto S pertenecerá al núcleo central pues la acción conjunta de las dos fuerzas vaa producir tensiones del mismo signo en toda la sección.
En función de lo expresado anteriormente, otra forma de encontrar el núcleo central es hallandolos puntos que se corresponden con todas las rectas tangentes a la sección. La porción delimitadapor estos puntos será el Núcleo Central. Podemos de�nir entonces al contorno del núcleo centralcomo el lugar geométrico de todos los puntos cuyas rectas asociadas son tangentes a la sección.
11

Figura 8: Sobre teorema 9
4.3. Casos particulares
Ejemplo 1. Sea R el radio de la circunferencia de la �gura 9. En este caso es claro que hay simetría,que el núcleo central será un círculo y que alcanza con determinar un punto. Dado el teorema 4
podemos decir que: R ·GP = ρ2y. Sabemos que A = ΠR2 y que Iy = ΠR4
4 entonces:
ρ2y =
R2
4
Finalmente,
GP =R
4será el radio de la circunferencia delimitante del núcleo central.
Figura 9: Núcleo central de una sección circular
Ejemplo 2. En el caso de una sección rectangular, como la de la �gura 10, tenemos que:
PGh
2= ρ2
x =bh3
12bh⇒ PG =
h
6
GSb
2= ρ2
y =hb3
12bh⇒ SG =
b
6(34)
12

En función de lo anterior se determinan los puntos P y S. De forma análoga se determinan los puntossimétricos, de manera que se dispone de cuatro puntos que pertenecen al contorno del núcleo central.Para determinar el resto de los puntos debe tenerse en cuenta que por el punto A pasan un conjuntode rectas (como la que esta dibujada en la �gura 10) que también son tangentes en A a la sección.Este conjunto de rectas tiene puntos correspondientes que pertenecen a la recta a. Teniendo encuenta que A pertenece a p y que A pertenece a s entonces la recta a queda determinada por lospuntos P y S. Luego los puntos que generan las rectas que pasan por A y no cortan a la secciónestán en el segmento PS. Razonando en forma análoga con los otros vértices se construye un romboque es en de�nitiva el núcleo central de la sección.
Figura 10: Núcleo central de una sección rectangular
Ejemplo 3. En este caso de una sección I (ver �gura 11) se obtendrá también un rombo pero comola inercia cambió, las distancias de los vértices del rombo al baricentro también cambiarán.
Figura 11: Núcleo central de una sección I
Ejemplo 4. En el caso de una sección I con alas desiguales (ver �gura 12) el núcleo central tendráforma de un hexágono no regular. Esto se debe a que podemos tomar 6 rectas tangentes que son p,q, r, s, t y u que permiten determinar 6 puntos del contorno del núcleo central. Razonando, en losvértices de la sección, de manera similar al caso de la sección rectangular tendremos que el núcleocentral resulta de unir esos 6 puntos hallados. de esa manera resulta un hexágono no regular.
13

Figura 12: Núcleo central de una sección I no simétrica
5. Materiales lineales en compresión que no soportan trac-
ciones
5.1. De�nición del problema
Esta situación se presenta en diversos casos ya sea porque el material no soporta tracciones (olas que soporta son despreciables) como es el caso del hormigón o porque las características de laestructura lo imponen (como es el caso de una zapata apoyada sobre el suelo, pues el vinculo entreel suelo y la estructura no tiene capacidad para soportar tracciones).
Estudiaremos el siguiente caso:
Sección simétrica
Fuerza aplicada en el eje de simetría, por lo tanto Mx = 0.
Deformaciones ε lineales y se cumplen las siguientes condiciones; si:
• ε ≤ 0 entonces σ = E · ε• ε > 0 entonces σ = 0
Es decir que aceptamos en este análisis, cuando hay compresión, la existencia de una relaciónlineal entre tensiones y deformaciones.
Veremos fundamentalmente el caso en que la fuerza N es de compresión (N < 0) pues es el másusual y además donde tiene sentido diseñar con materiales o estructuras que no soportan tracciones.Si la fuerza N es de tracción no debe utilizase un material con estas características sino que debebuscarse una solución estructural más adecuada.
En función de lo anterior aplicamos una fuerza N de compresión. Si el punto de aplicación de Npertenece al núcleo central, estamos en el caso ya estudiado en las secciones anteriores. En este casotoda la sección trabajará a compresión y no hay diferencia entre un material que soporta traccionescon otro que no las soporta, pues éstas no existen.
Por otro lado si el punto de aplicación de N no pertenece al NC entonces la línea neutra paraun material que soporta tracciones, cortará la sección y la dividirá en una zona de compresión yotra de tracción. Cuando el material no soporta tracciones no podrá continuarse el razonamientoanterior, sino que deberá realizarse otro razonamiento diferente desde el inicio pues son diferenteslas hipótesis empleadas para el material.
14

5.2. Resolución del problema
Usaremos un sistema de ejes diferente al hasta ahora utilizado. Tomaremos el origen decoordenadas en la intersección de la línea neutra con el eje de simetría de la sección (eje x) orientadohacia la zona de mayores compresiones.
Figura 13: Sección simétrica con carga aplicada en el eje de simetría
Si planteamos el equilibrio de fuerzas (primera cardinal) en la dirección perpendicular a la sección(de�nida por el eje z) tendremos que la directa N aplicada se puede expresar de la siguiente forma(ver �gura 14):
N =
∫A
σ dA (35)
σ = k · x = −σmaxc
cx (36)
Donde σmaxc ≥ 0, es el valor absoluto de la tensión maxima de compresión.Sustituyendo la ecuación 36 en la ecuación 35 obtenemos:
∫A
σ dA = −σmaxc
c
∫x dA (37)
Podemos también plantear el equilibrio de momentos (segunda cardinal) en el origen decoordenadas elegido. De esa manera queda:
N(c− d) =
∫A
σx dA
= −σmaxc
c
∫x2 dA (38)
Podemos utilizar una notación más reducida de�niendo dos parámetros (inercia de primer ordenreferida a la línea neutra y inercia de segundo orden referida a la línea neutra) que serán funciónde la posición de la línea neutra, o sea, de c. Ellas son:
∫x dA = µLN (c) (39)∫x2 dA = ILN (c) (40)
Entonces,
N = −σmaxc
cµLN (c) (41)
N(c− d) = −σmaxc
cILN (c) (42)
15

Figura 14: Distribución de tensiones y de deformaciones en una sección
Del cociente entre la relación 42 y 41 obtenemos:
c− d =ILN (c)
µLN (c)(43)
En la ecuación 43, d es un parámetro conocido, mientras que c es desconocido. Para hallar cutilizaremos la relación 43 hallando previamente las inercias de primer y segundo orden. A partirde entonces, estaremos en condiciones de determinar la distribución de tensiones y en particular lamáxima tensión de compresión a la cual está sometida la pieza (σmaxc) utilizando la expresión 41o la expresión 42.
Ejemplo 5. Estudiemos una sección rectangular.Calculamos primeramente ILN y µLN :
Figura 15: Sección rectangular
16

ILN =
∫A
x2dA
= b
∫ c
0
x2dx
=bx3
3|c0
=bc3
3
µLN =
∫A
xdA
= b
∫ c
0
xdA
=bx2
2|c0
=bc2
2(44)
Entonces, la relación entre el momento de segundo orden y el de primer orden será:
ILN (c)
µLN (c)=
2
3c
A partir de la ecuación 43 sabemos entonces que:
c− d =2
3c
y por lo tanto
c = 3d
La tensión máxima la obtenemos sustituyendo en la primera cardinal,
N = −σmaxc
c
bc2
2
σmaxc = −2N
bc(45)
Debe observarse que N es una fuerza de compresión, o sea que es de signo negativo, lo cualhace que el segundo termino de la expresión 45 para el caso en estudio sea siempre positivo. Enconsecuencia σmaxc será positivo como corresponde de acuerdo a su de�nición.
Se pueden buscar en tablas los momentos de primer y segundo orden, de algunas formas desecciones en función de c.
5.3. Caso general
En la sección 5.2 vimos el caso particular de una sección simétrica con una fuerza N aplicada enel eje de simetría. Si estas condiciones no se cumplen estamos en el caso general que describiremosa continuación.
Si tenemos una sección cualquiera y un punto de aplicación de la fuerza podemos elegir unsistema de coordenadas (x, y) como se indica en la �gura 16. El punto de aplicación de la fuerzaqueda de�nido por las coordenadas ex y ey.
En ese sistema de ejes, la deformación tendrá una expresión del tipo:
ε = ax+ by + c
y la tensión tendrá una expresión para:
1. ε ≤ 0 entonces σ = E(ax+ by + c)
17

Figura 16: Caso general con carga aplicada en cualquier punto
2. ε > 0 entonces σ = 0
En este caso, la línea neutra será,
LN) ax+ by + c = 0
Como los ejes elegidos son arbitrarios, pueden tomarse para que c 6= 0.Llamaremos
a∗ =a
cy
b∗ =b
c
Entonces, podemos escribir la tensión normal en la sección para ε ≤ 0 de la forma:
σ = Ec(a∗x+ b∗y + 1) (46)
Para que exista equilibrio debe cumplirse que:
N =
∫A
σ dA = Ec
(a∗∫A
x dA+ b∗∫A
y dA+A
)= Ecf(a∗, b∗) (47)
Nex =
∫A
xσ dA = Ec
(a∗∫A
x2 dA+ b∗∫A
xy dA+
∫A
x dA
)= Ecg(a∗, b∗) (48)
Ney =
∫A
yσ dA = Ec
(a∗∫A
xy dA+ b∗∫A
y2 dA+
∫A
y dA
)= Ech(a∗, b∗) (49)
Se pueden despejar entonces las coordenadas del punto de aplicación (ex, ey) como:
ex =g(a∗, b∗)
f(a∗, b∗)(50)
ey =h(a∗, b∗)
f(a∗, b∗)(51)
Dado que tenemos dos ecuaciones con dos incógnitas (a∗ y b∗) estas se pueden obtener. Acontinuación basta con utilizar una de las ecuaciones de equilibrio para despejar las tensiones en lasección.
18

5.4. Secciones compuestas
En el caso de una sección compuesta por dos materiales diferentes, como en la �gura 17 en elque uno soporta tracciones (el acero) y el otro no (el hormigón), debemos considerar los aportesresistentes de ambos materiales al plantear el equilibrio de fuerzas. El estudio en detalle de estasituación será realizado en otro capítulo.
Figura 17: Distribución de tensiones y deformaciones en una sección mixta
Estos apuntes fueron elaborados por:
Dr. Ing. Atilio Morquio
Ing. Lucía Delacoste
Colaboraron en la corrección:
Br. María Laura Reboredo
Ing. Valentina Machín
Ing. Agustin Spalvier
19