fisica Conf no.8 fisi i ok
44
1 Conferencia No.8 Temática: Introducción a la Dinámica de la rotación del sólido rígido alrededor de un eje fijo. Sistemas de partículas y Modelo físico del Sólido Rígido. Centro de masa. Momento de Inercia. Ley de Newton para la rotación. Aplicaciones en la especialidad. Bibliografia Física Universitaria. Sears-Zemansky/Young-Freeman Volumen 1. Duodécima Ed. Cap. 9 ROTACIÓN DE CUERPOS RÍGIDOS. Cap.10 DINÁMICA DEL MOVIMIENTO ROTACIONAL. Clasif. 53 Y681 YOU. Objetivo: Familiarizarse con la descripción del movimiento de rotación a través de los conceptos y leyes necesarias como momento de inercia, torque y Segunda Ley de Newton para la rotación, con las magnitudes cinemáticas lineales y angulares que permitan dar respuesta o solución a situaciones y aplicaciones dadas en la vida y la profesión.
Transcript of fisica Conf no.8 fisi i ok

1
Conferencia No.8 Temática: Introducción a la Dinámica de la rotación del sólido rígido
alrededor de un eje fijo. Sistemas de partículas y Modelo físico del Sólido Rígido. Centro de masa. Momento de Inercia. Ley de Newton para la rotación. Aplicaciones en la especialidad.
BibliografiaFísica Universitaria. Sears-Zemansky/Young-Freeman Volumen 1. Duodécima Ed. Cap. 9 ROTACIÓN DE CUERPOS RÍGIDOS. Cap.10 DINÁMICA DEL MOVIMIENTO ROTACIONAL. Clasif. 53 Y681 YOU.
Objetivo:Familiarizarse con la descripción del movimiento de rotación a través de los conceptos y leyes necesarias como momento de inercia, torque y Segunda Ley de Newton para la rotación, con las magnitudes cinemáticas lineales y angulares que permitan dar respuesta o solución a situaciones y aplicaciones dadas en la vida y la profesión.

2
Definición y clasificación de los sistemas de partículas.
• ¿Qué es un sistema de partículas?
Modelo más complejo que el de la partícula. Considera los objetos como agregados de partículas que interaccionan.
Se usa cuando el modelo de partícula no es adecuado y considera las dimensiones del objeto en estudio.
• Clasificación de los sistemas de partículas.
Discretos nº finito de partículas Continuos distribución continua de materia
Deformables Rígidos
Cambia distancia No cambia
Deformables Rígidos
Cambia forma No cambia
1m
2m
3m
4m
nm1r
2r
XY
Z
O
X
Y
Z
O
dm
r

3
Centro de masas. Movimiento del centro de masas de un sistema de partículas.
• Centro de masa (CM)
Para un sistema de partículas discreto el CM es un punto cuya posición, velocidad y aceleración vienen dadas por
M
am
dt
vdm
Mdt
vda
M
vm
dt
rdm
Mdt
rdv
M
rm
m
rm
mm
rmrmr
i iiii i
CMCM
i iiii i
CMCM
i ii
i i
i iiCM
1
121
2211
• Se puede colocar un sistema de referencia en el CM llamado sistema C (SC), distinto del sistema inercial donde se encuentra el observador que se llama sistema laboratorio o sistema L (SL).
1m
2m
3m
4m
nm1r
2r
XY
Z
O
CM
CMr
LXLY
LZ
OSL
CX
CY
CZ
SC
CM4m1m
2m
3m
nm

4
• Para un sistema de partículas continuo la posición, velocidad y aceleración del CM vienen dadas por
dmaM
a
dmvM
v
dmrM
r
CM
CM
CM
1
1
1
Centro de masa de algunos sistemas de partículas continuos
Centro de masas. Movimiento del centro de masas de un sistema de partículas.
5
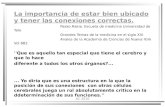
• Fuerzas internas y fuerzas externas
1m
2m
S
S’• Sistema S
21 , FF
Fuerzas externas
2112 , ff
Fuerzas internas
• Fuerza externa resultante que actúa sobre el sistema S
i
iext FFFF
21
• Para el sistema S se puede demostrar que
dt
pdFext
Como CMvMp
CMCM
ext aMdt
vdMF
• Si el sistema S se encuentra aislado
0
dt
pdFext ctevCM
El CM de un sistema de partículas se mueve como si fuera una partícula de masa igual a la masa total del sistema y estuviera sujeto a la fuerza externa resultante.
El CM de un sistema de partículas aislados se mueve con velocidad constante en relación con cualquier sistema de referencia inercial.
2F
12f 21f
1F
Centro de masas. Movimiento del centro de masas de un sistema de partículas.



F1 2


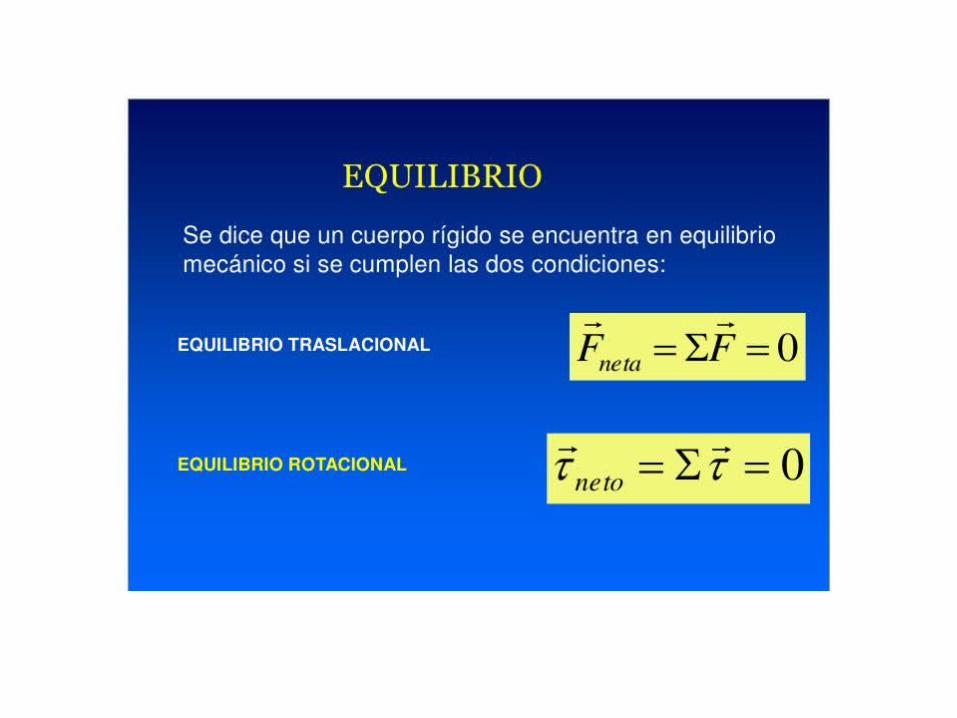
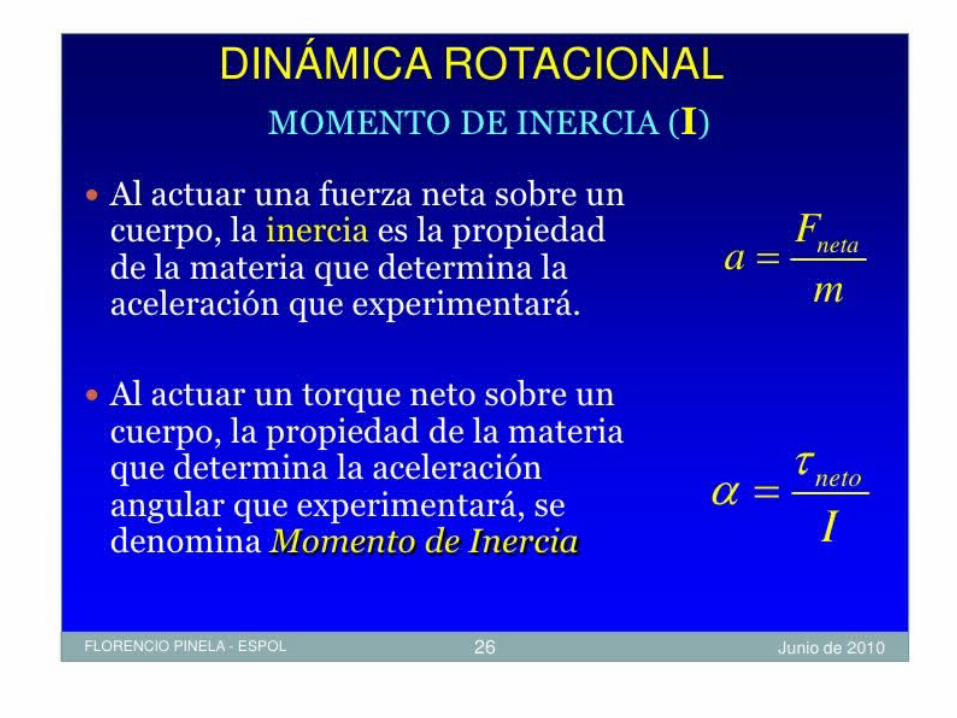

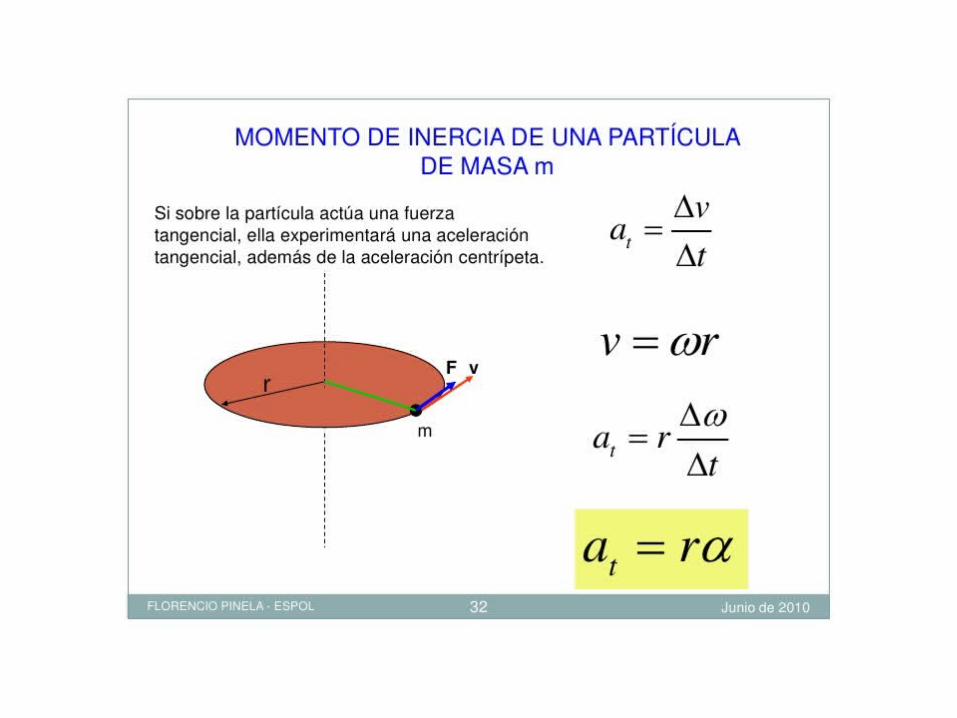
Momento de InerciaI de un cuerpoEs una magnitud física escalar, que describe como es la distribución de masas de un cuerpo o un sistema de partículas alrededor de uno de sus puntos o eje de rotación.
Es análogo a la masa de un cuerpo, representa la inercia de un objeto a rotar.
Para un sistema de partículas se define como la suma de los productos entre las masas de las partículas que componen un sistema, y el cuadrado de la distancia r de cada partícula a al eje de giro escogido. Matemáticamente se expresa como:

• Note que si:I = ∑ mi . ri ²
Entonces, si se tiene sólo una partícula: I = m.r²
El momento de inercia depende de la distancia entre el objeto y el eje de giro.
m

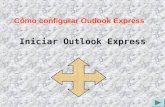
Motor de vapor Boulton y Watt, 1788.
Regulador centrífugo o Regulador de Watt
James Watt en 1788 concibió un péndulo con dos masas suspendidas por dos brazos articulados rotatorios.
El regulador centrífugo es el sensor de una cadena mecánica de retroalimentación, que proporciona un parámetro que es función de la velocidad angular. Este parámetro puede ser un desplazamiento mecánico que actúe sobre una válvula de control de retroalimentación negativa que se suministra a un motor para mantener constante su velocidad.Se compone de dos o más masas en rotación alrededor de un árbol giratorio. Como resultado de la fuerza centrífuga las masas tienden a alejarse del eje de rotación, pero al hacerlo se oponen a un sistema de resorte. Un sistema de palanca transforma el movimiento radial de las masas en deslizamiento axial sobre un collar. Una palanca de cambios tiene esta última para transferir el mecanismo que se quiere controlar, como puede ser la válvula de paso de vapor o de combustible, o de agua en una tubería de carga
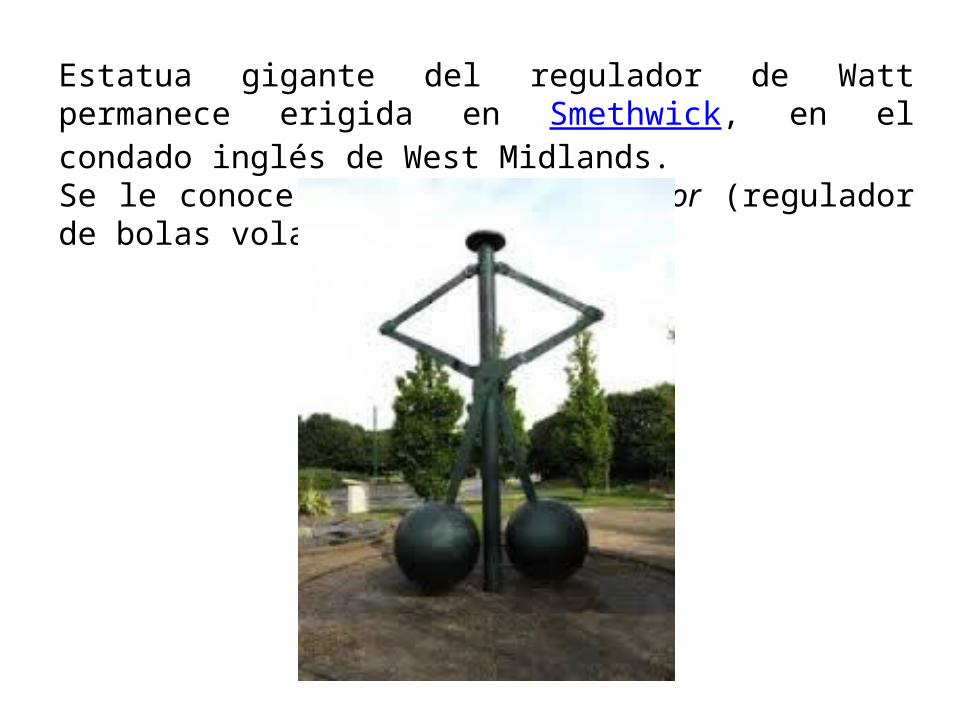
Estatua gigante del regulador de Watt permanece erigida en Smethwick, en el condado inglés de West Midlands. Se le conoce como el flyball governor (regulador de bolas voladoras).

19
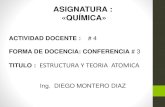
Cilindro
R
L
RL
2
2
1MRIo
22312
1LRMIo
a b
c 22
12
1baMIo
Paralelepípedo
ab
ab
22
12
1baMIo
2
12
1MbIo
Placa rectangular
Varilla delgada
L2
12
1MLIo
Disco
R
R
2
2
1MRIo
2
4
1MRIo
R
Esfera
2
5
2MRIo
R 2MRIo
Anillo
•Hemos visto que el momento de inercia para un sistema de partículas discreto se define
iiiRmI 2
•Para un objeto continuo el sumatorio anterior se reemplaza por una integral
dmRI 2
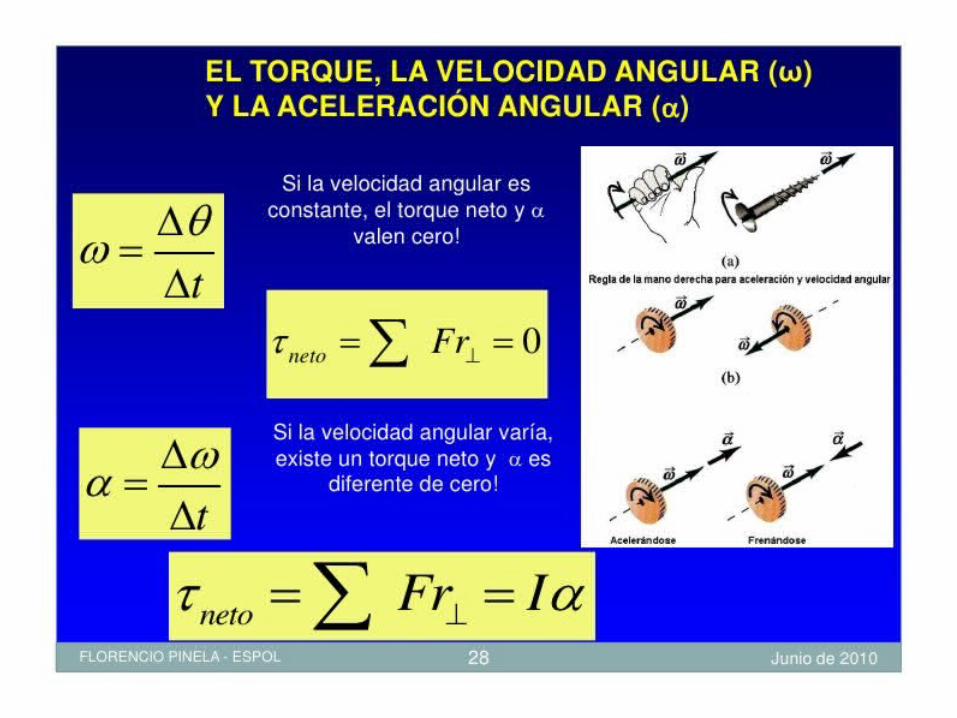
Movimiento de rotación en torno a un eje fijo de un sólido rígido.



28
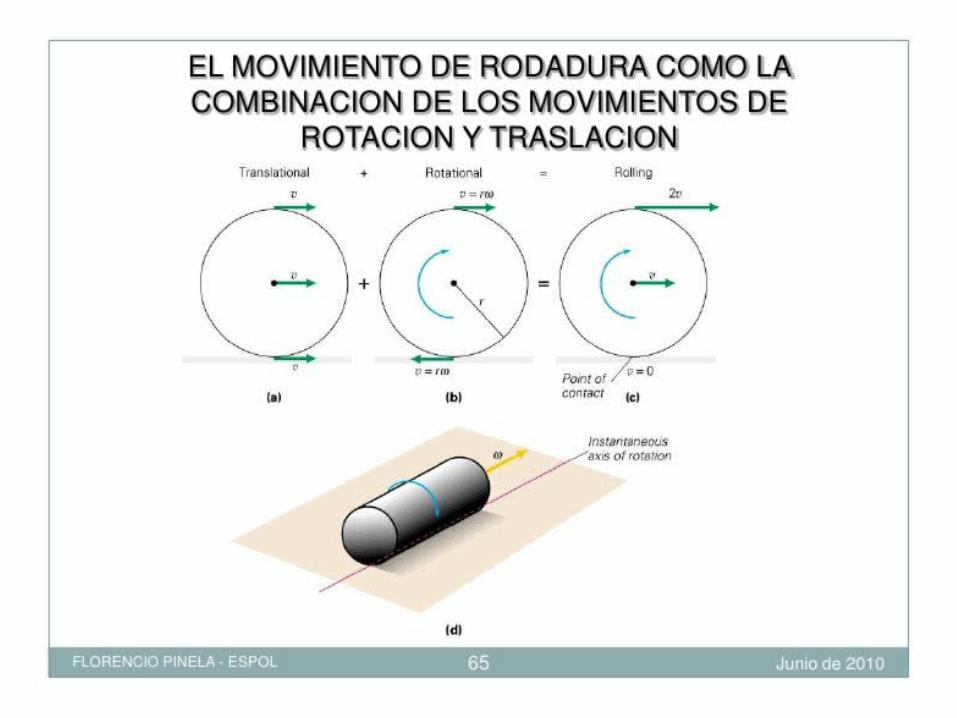
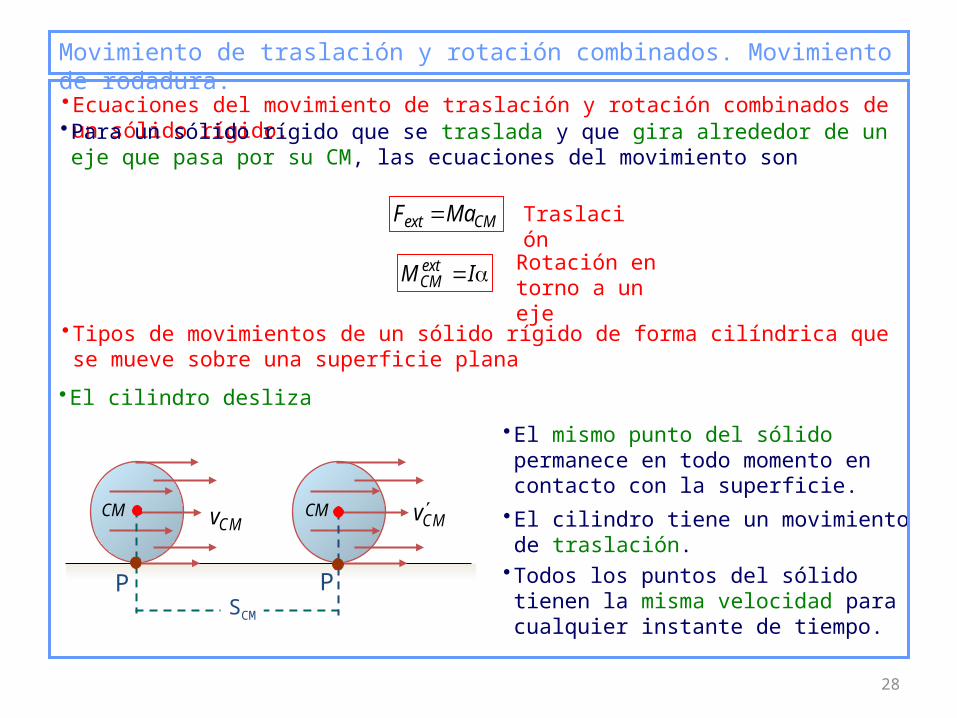
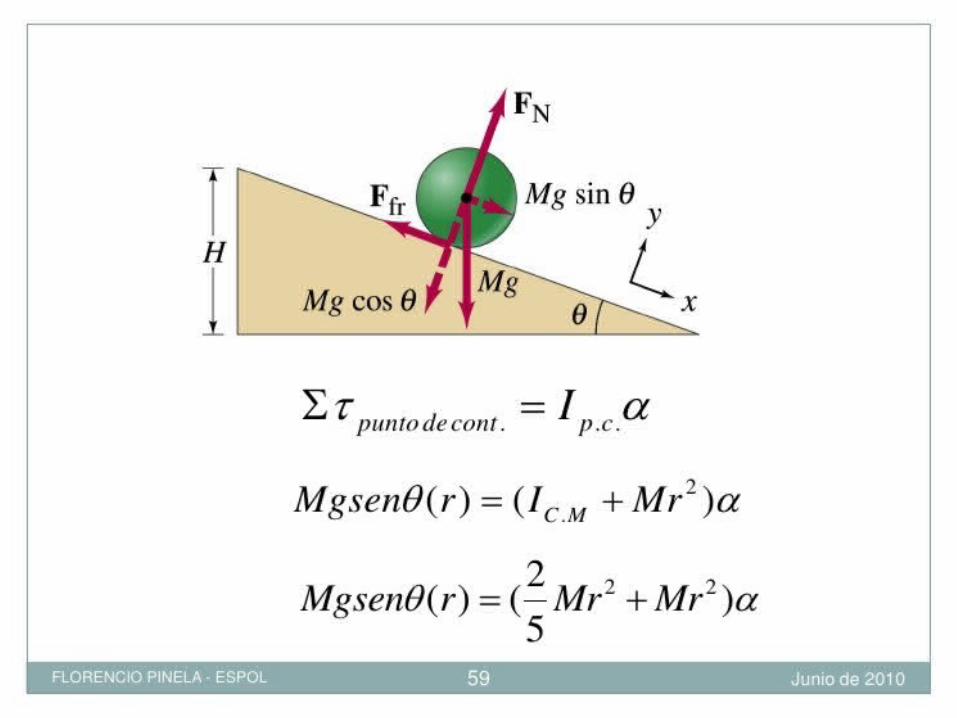
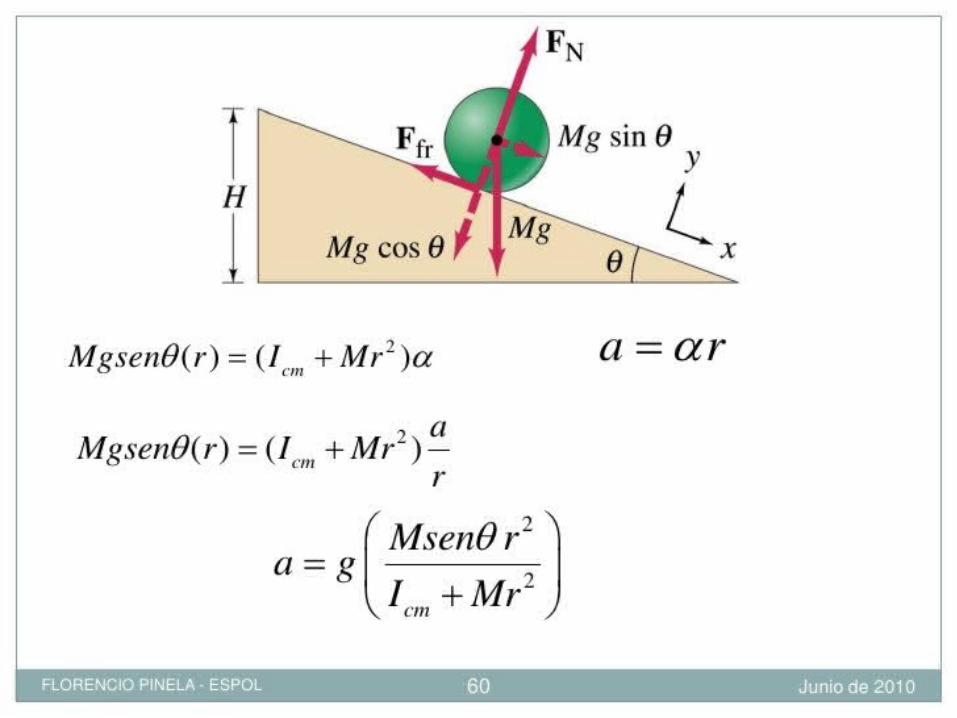
Movimiento de traslación y rotación combinados. Movimiento de rodadura.
•Ecuaciones del movimiento de traslación y rotación combinados de un sólido rígido.•Para un sólido rígido que se traslada y que gira alrededor de un eje que pasa por su CM, las ecuaciones del movimiento son
CMext aMF
IM extCM
•Tipos de movimientos de un sólido rígido de forma cilíndrica que se mueve sobre una superficie plana
•El cilindro desliza
•Todos los puntos del sólido tienen la misma velocidad para cualquier instante de tiempo.
•El cilindro tiene un movimiento de traslación.
•El mismo punto del sólido permanece en todo momento en contacto con la superficie.
Traslación
Rotación en torno a un eje
CMv
CMv
SCM
CM CM
P P

29
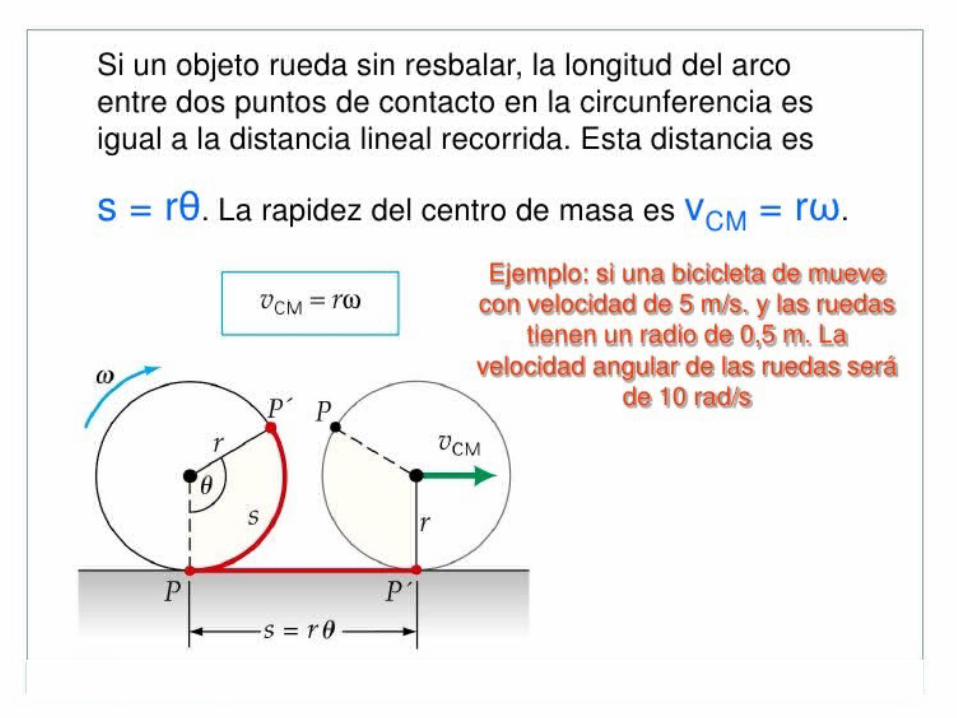
•El cilindro rueda sin deslizar. Movimiento de rodadura.
•Un punto distinto del sólido en cada instante permanece en contacto con la superficie verificándose.
CM
P
Pj
RS CM
SCM
RsCM RvCM RaCM
•El cilindro tiene un movimiento de traslación y rotación combinados.
R
R
RCM
R
R
Traslación Rotación
+ R
R2
0pv
•La velocidad del punto de contacto con la superficie es nula. •Si existe fuerza de rozamiento ésta es estática.
CM
CM CM
Movimiento de traslación y rotación combinados. Movimiento de rodadura.
30
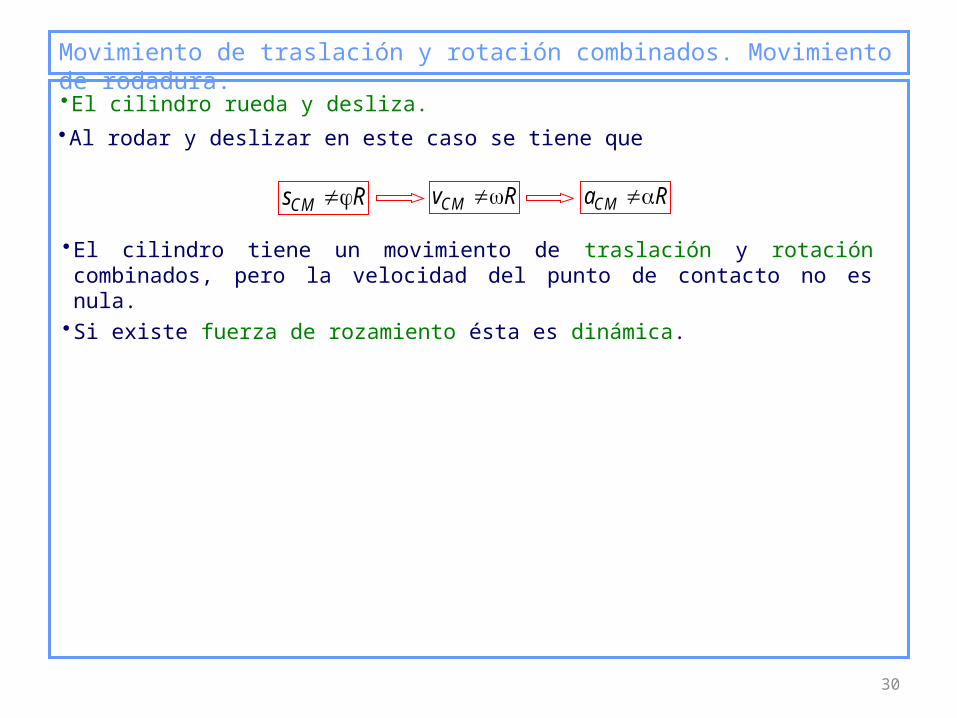
•El cilindro rueda y desliza.
•Al rodar y deslizar en este caso se tiene que
RsCM RvCM RaCM
•El cilindro tiene un movimiento de traslación y rotación combinados, pero la velocidad del punto de contacto no es nula.•Si existe fuerza de rozamiento ésta es dinámica.
Movimiento de traslación y rotación combinados. Movimiento de rodadura.

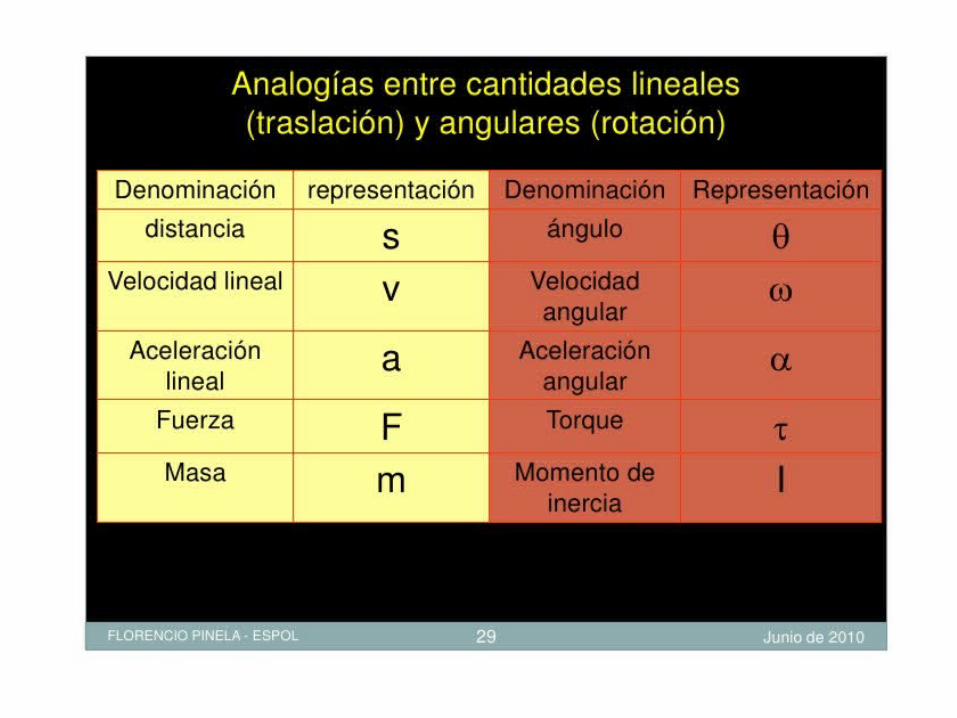
Analogías importantesPara muchos problemas que involucran rotación, hay una analogía extraída del movimiento lineal.
xf
R
4 kg
wt wo = 50
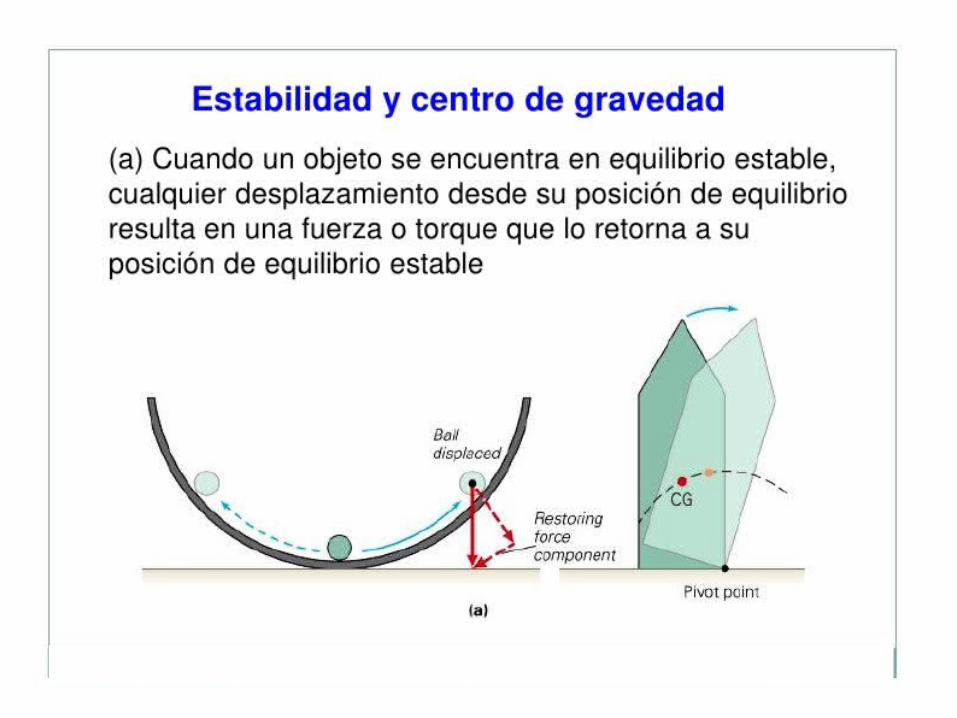
rad/s t = 40 N m
Una fuerza resultante F produce aceleración negativa a para una masa m.
F ma
Im
Un momento de torsión resultante t produce aceleración angular a de disco con inercia rotacional I.
I







Una aplicación de la Segunda ley de rotación de Newton
R
4 kg
wF wo = 50 rad/s
R = 0.20 mF = 40 N t = Ia
¿Cuántas revoluciones requiere para detenerse?¿Cuántas revoluciones
requiere para detenerse?
FR = (½mR2)a
2 2(40N)
(4 kg)(0.2 m)
F
mR
a = 100 rad/s2
2 = aq wf2 - wo
20
2 20
2
(50 rad/s)
2 2(100 rad/s )
q = 12.5 rad = 1.99 rev

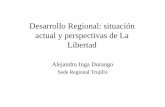
Ejemplo 3: ¿Cuál es la aceleración lineal de la masa de 2-kg que cae?
Aplique 2a ley de Newton al disco rotatorio:
R = 50 cm
6 kg
2 kg+a
T
T
mg
= tIa TR = (½MR2)a
T = ½MR a
y T = ½MaT = ½MR( ) ;aR
Aplique 2a ley de Newton a la masa que cae:
mg - T = ma mg - = maT
(2 kg)(9.8 m/s2) - ½(6 kg) a = (2 kg) a
19.6 N - (3 kg) a = (2 kg) a a = 3.92 m/s2
a = aR; a = peroaR
½Ma
R = 50 cm
6 kg
2 kg
a = ?
M
Orientaciones de estudio
http://www.uclm.es/profesorado/ajbarbero/S_SolidoRigido/10_SolidoRigido_Resueltos_Dinamica.pdf#page=1&zoom=auto,23,50http://es.slideshare.net/fpinela/dinamica-rotacional-bachillerato
Aplicaciones del torque y momentos de inercia en, en la ingeniería civil, aeronáutica, centrales azucarero (trapiches), en las bicicletas, tornos,
¿Cómo funcionan los vibradores de los celulares y otros mecanismos vibratorios en la técnica, como para masajes?