Plan de Gesti³n y Conservaci³n de Lavatera triloba subsp. pallescens
Upload
nguyenliemCategory
view
338download
5
Departamento de Fısica Aplicada
Area de Fısica Aplicada
Fısica IMecanica, Oscilaciones y Ondas, Termodinamica
Enero, 2011
n=1 n=2 n=3 n=4 n=5
A
AA
AA
A
AA
AA
AA
AA
A
NN
NN
N
Primer armónico ó fundamental Segundo armónico Tercer armónico Cuarto armónico Quinto armónico
Alejandro Medina Domınguez Jesus Ovejero Sanchez
version OCW


Indice general
1. Sistemas de medida y analisis dimensional 11
1.1. Magnitudes fundamentales en Fısica . . . . . . . . . . . . . . . . . . . 11
1.2. Sistemas de unidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3. Conversion de unidades . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.4. Analisis dimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5. Notacion cientıfica y ordenes de magnitud . . . . . . . . . . . . . . . . 17
1.6. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
I Fundamentos de Mecanica Clasica 25
2. Cinematica de una partıcula 27
2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2. Movimiento en una dimension . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.1. Velocidad media . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.2. Velocidad instantanea . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.3. Aceleracion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.4. Ejemplos particulares: movimientos uniforme y uniformemente
acelerado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3. Movimiento en dos y tres dimensiones . . . . . . . . . . . . . . . . . . . 36
2.3.1. Velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.3.2. Aceleracion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.3.3. Componentes de la aceleracion . . . . . . . . . . . . . . . . . . . 39
2.3.4. Ejemplos particulares . . . . . . . . . . . . . . . . . . . . . . . . 41

4 INDICE GENERAL
2.4. Movimiento relativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.4.1. Velocidad relativa . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.4.2. Movimiento relativo de traslacion uniforme . . . . . . . . . . . . 48
2.4.3. Movimiento relativo de rotacion uniforme . . . . . . . . . . . . . 50
2.4.4. Movimiento relativo con respecto a la Tierra . . . . . . . . . . . 52
2.5. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3. Leyes de Newton y sus aplicaciones 65
3.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.2. Primera Ley de Newton. Sistemas de referencia inerciales . . . . . . . . 67
3.3. Fuerza, masa y segunda Ley de Newton . . . . . . . . . . . . . . . . . . 70
3.4. Ley de accion y reaccion . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.5. Las fuerzas en la Naturaleza . . . . . . . . . . . . . . . . . . . . . . . . 73
3.6. Campos y fuerzas de contacto . . . . . . . . . . . . . . . . . . . . . . . 75
3.7. Fuerza gravitatoria terrestre y peso . . . . . . . . . . . . . . . . . . . . 76
3.8. Fuerzas de rozamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.8.1. Friccion estatica . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.8.2. Friccion cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.8.3. Friccion por rodadura . . . . . . . . . . . . . . . . . . . . . . . 83
3.8.4. Fuerzas de arrastre en fluidos . . . . . . . . . . . . . . . . . . . 84
3.9. Movimiento relativo a sistemas de referencia no inerciales . . . . . . . . 86
3.9.1. Concepto de fuerza ficticia . . . . . . . . . . . . . . . . . . . . . 87
3.9.2. Ejemplos particulares . . . . . . . . . . . . . . . . . . . . . . . . 87
3.10. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4. Trabajo, energıa y conservacion de la energıa 101
4.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.2. Concepto de trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.2.1. Sistemas unidimensionales . . . . . . . . . . . . . . . . . . . . . 101
4.2.2. Expresion general de trabajo . . . . . . . . . . . . . . . . . . . . 104
4.3. Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106

INDICE GENERAL 5
4.4. Energıa cinetica. Teorema trabajo-energıa . . . . . . . . . . . . . . . . 107
4.5. Fuerzas conservativas y energıa potencial . . . . . . . . . . . . . . . . . 108
4.6. Analisis de curvas de energıa potencial . . . . . . . . . . . . . . . . . . 110
4.7. Conservacion de la energıa . . . . . . . . . . . . . . . . . . . . . . . . . 115
4.7.1. Sistemas conservativos . . . . . . . . . . . . . . . . . . . . . . . 115
4.7.2. Sistemas no conservativos . . . . . . . . . . . . . . . . . . . . . 117
4.7.3. Principio de conservacion de la energıa . . . . . . . . . . . . . . 118
4.8. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5. Sistemas de partıculas. Momento lineal y su conservacion 125
5.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.2. Centro de masas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.2.1. Definicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.2.2. Movimiento del centro de masas . . . . . . . . . . . . . . . . . . 129
5.3. Momento lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.3.1. Definicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.3.2. Conservacion del momento lineal . . . . . . . . . . . . . . . . . 131
5.4. Sistemas de referencia del centro de masas y del laboratorio . . . . . . 131
5.5. Colisiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
5.5.1. Colisiones elasticas en una dimension . . . . . . . . . . . . . . . 133
5.5.2. Colisiones inelasticas en una dimension . . . . . . . . . . . . . . 136
5.5.3. Colisiones en tres dimensiones . . . . . . . . . . . . . . . . . . . 137
5.6. Impulso y fuerza media . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
5.7. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
6. Dinamica de la rotacion 147
6.1. Cuerpo rıgido, traslacion y rotacion . . . . . . . . . . . . . . . . . . . . 147
6.2. Energıa cinetica rotacional. Momento de inercia . . . . . . . . . . . . . 148
6.3. Calculo de momentos de inercia . . . . . . . . . . . . . . . . . . . . . . 149
6.3.1. Sistemas discretos . . . . . . . . . . . . . . . . . . . . . . . . . . 149
6.3.2. Sistemas continuos . . . . . . . . . . . . . . . . . . . . . . . . . 151

6 INDICE GENERAL
6.3.3. Teorema de los ejes paralelos (Steiner) . . . . . . . . . . . . . . 156
6.3.4. Teorema de los ejes perpendiculares . . . . . . . . . . . . . . . . 158
6.4. Momento angular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
6.5. Segunda Ley de Newton para la rotacion . . . . . . . . . . . . . . . . . 160
6.5.1. Partıcula unica . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
6.5.2. Sistemas de partıculas . . . . . . . . . . . . . . . . . . . . . . . 162
6.6. Conservacion del momento angular y sus aplicaciones . . . . . . . . . . 165
6.7. Trabajo de rotacion. Teorema trabajo-energıa . . . . . . . . . . . . . . 167
6.8. Analogıas entre las ecuaciones de la traslacion y la rotacion . . . . . . . 168
6.9. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
7. Propiedades elasticas de los materiales. Mecanica de Fluidos 175
7.1. Propiedades elasticas de los materiales . . . . . . . . . . . . . . . . . . 175
7.1.1. Curvas esfuerzo-deformacion . . . . . . . . . . . . . . . . . . . . 175
7.1.2. Materiales elasticos . . . . . . . . . . . . . . . . . . . . . . . . . 179
7.1.3. Constantes elasticas . . . . . . . . . . . . . . . . . . . . . . . . 180
7.2. Estados de la materia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
7.3. Fluidos en reposo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
7.3.1. Presion en un fluido . . . . . . . . . . . . . . . . . . . . . . . . 184
7.3.2. Variacion de la presion con la altura en un fluido incompresible 185
7.3.3. Variacion de la presion con la altura en un fluido compresible . . 187
7.3.4. Principio de Pascal . . . . . . . . . . . . . . . . . . . . . . . . . 188
7.3.5. Principio de Arquımedes . . . . . . . . . . . . . . . . . . . . . . 189
7.4. Fluidos en movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
7.4.1. Fluido ideal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
7.4.2. Ecuacion de continuidad . . . . . . . . . . . . . . . . . . . . . . 193
7.4.3. Ecuacion de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . 194
7.5. Fluidos viscosos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
7.6. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200

INDICE GENERAL 7
II Fundamentos de oscilaciones y ondas 205
8. Movimiento oscilatorio 207
8.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
8.2. Cinematica del movimiento armonico simple . . . . . . . . . . . . . . . 208
8.3. Dinamica del movimiento armonico simple . . . . . . . . . . . . . . . . 211
8.4. Energıa de un oscilador armonico simple . . . . . . . . . . . . . . . . . 213
8.5. Ejemplos de movimiento armonico simple . . . . . . . . . . . . . . . . . 214
8.5.1. Muelle vertical . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
8.5.2. Pendulo simple . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
8.5.3. Pendulo fısico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
8.5.4. Pendulo de torsion . . . . . . . . . . . . . . . . . . . . . . . . . 218
8.6. M.A.S. y movimiento circular uniforme . . . . . . . . . . . . . . . . . . 219
8.7. Movimiento en las proximidades del equilibrio . . . . . . . . . . . . . . 222
8.8. Movimiento armonico amortiguado . . . . . . . . . . . . . . . . . . . . 223
8.9. Oscilaciones forzadas y resonancias . . . . . . . . . . . . . . . . . . . . 225
8.10. Analisis de Fourier de movimientos periodicos . . . . . . . . . . . . . . 228
8.11. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
9. Movimiento ondulatorio 237
9.1. Introduccion: conceptos basicos y tipos de ondas . . . . . . . . . . . . . 237
9.2. Pulsos unidimensionales . . . . . . . . . . . . . . . . . . . . . . . . . . 240
9.2.1. Funcion de ondas . . . . . . . . . . . . . . . . . . . . . . . . . . 241
9.2.2. Superposicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
9.2.3. Reflexion y transmision . . . . . . . . . . . . . . . . . . . . . . . 244
9.2.4. Velocidad de propagacion de las ondas unidimensionales . . . . 245
9.3. Ondas armonicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
9.3.1. Energıa transmitida por las ondas armonicas . . . . . . . . . . . 250
9.3.2. Interferencia de ondas armonicas . . . . . . . . . . . . . . . . . 251
9.3.3. Ondas estacionarias . . . . . . . . . . . . . . . . . . . . . . . . . 253
9.4. Ecuacion de ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256

8 INDICE GENERAL
9.5. Ondas en tres dimensiones . . . . . . . . . . . . . . . . . . . . . . . . . 258
9.5.1. Propagacion de ondas en el espacio . . . . . . . . . . . . . . . . 259
9.5.2. Ondas sonoras . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
9.6. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
III Fundamentos de Termodinamica 275
10.Introduccion a la Termodinamica 277
10.1. Conceptos basicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
10.1.1. Sistemas termodinamicos . . . . . . . . . . . . . . . . . . . . . . 277
10.1.2. Interacciones termodinamicas . . . . . . . . . . . . . . . . . . . 278
10.1.3. Estados de equilibrio . . . . . . . . . . . . . . . . . . . . . . . . 279
10.1.4. Variables termodinamicas . . . . . . . . . . . . . . . . . . . . . 280
10.1.5. Procesos termodinamicos . . . . . . . . . . . . . . . . . . . . . . 281
10.2. Temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
10.2.1. Equilibrio termico. Principio Cero . . . . . . . . . . . . . . . . . 281
10.2.2. Escala de temperaturas del gas ideal . . . . . . . . . . . . . . . 282
10.2.3. Gas ideal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
10.3. Primer Principio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
10.3.1. Trabajo termodinamico . . . . . . . . . . . . . . . . . . . . . . . 286
10.3.2. Trabajo disipativo y procesos cuasiestaticos . . . . . . . . . . . 288
10.3.3. Interpretacion geometrica del trabajo cuasiestatico . . . . . . . 289
10.3.4. Experimentos de Joule . . . . . . . . . . . . . . . . . . . . . . . 292
10.3.5. Trabajo adiabatico y energıa interna . . . . . . . . . . . . . . . 292
10.3.6. Calor y Primer Principio de la Termodinamica . . . . . . . . . . 293
10.3.7. Capacidades calorıficas . . . . . . . . . . . . . . . . . . . . . . . 295
10.4. Segundo Principio de la Termodinamica . . . . . . . . . . . . . . . . . 299
10.4.1. Maquinas termodinamicas . . . . . . . . . . . . . . . . . . . . . 299
10.4.2. Enunciados del Segundo Principio . . . . . . . . . . . . . . . . . 301
10.4.3. Procesos reversibles e irreversibles . . . . . . . . . . . . . . . . . 302
10.4.4. Ciclo y teorema de Carnot . . . . . . . . . . . . . . . . . . . . . 302
INDICE GENERAL 9
10.5. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
IV Practicas de laboratorio 313
Caıda libre 315
Estatica y dinamica de un muelle vertical 319
Pendulo simple 324
Pendulo fısico 330
Pendulo de torsion y momentos de inercia 335
Ondas estacionarias 341
Conservacion de la energıa 346
Dilatacion de solidos y lıquidos 350
Ecuacion de estado del gas ideal 355
Bibliografıa 360
Indice alfabetico 363


Capıtulo 1
Sistemas de medida y analisisdimensional
1.1. Magnitudes fundamentales en Fısica
La Fısica es una ciencia cuantitativa que trata de entender un cierto conjunto de
hechos observables en la Naturaleza. Las leyes de la Fısica expresan relaciones entre
ciertas magnitudes como pueden ser fuerza, aceleracion, corriente electrica, tempera-
tura, energıa, etc. Son necesidades fundamentales en Fısica el definir con claridad y
unicidad esas magnitudes y ser capaz de medirlas con precision.
Aunque existen gran cantidad de magnitudes en Fısica, la mayor parte de ellas se
pueden expresar en terminos de unas cuantas magnitudes fundamentales. En Mecanica,
por ejemplo, las magnitudes fundamentales son longitud, masa y tiempo. Cualquier otra
magnitud fısica propia de la Mecanica se puede expresar como combinacion de esas tres.
Las magnitudes que no son fundamentales, sino que se expresan como combinacion de
ellas se denominan derivadas. Ejemplos en Mecanica son la velocidad, ~v, la aceleracion,
~a, la energıa, E, la presion, P , etc. Las magnitudes fundamentales o derivadas pueden
ser escalares o vectoriales , dependiendo de que puedan ser caracterizadas mediante un
unico numero o sea necesario incluir una direccion y un sentido.
La medida de cualquier magnitud fısica y, en particular, de las magnitudes funda-
mentales, exige acompanar el valor medido de la referencia o patron respecto a la que
se compara esa medida para asignarle un valor. No tiene sentido decir que la altura
de una casa es 5, hay que anadir una referencia o patron (unidad) respecto a la que

12 CAPITULO 1. SIST. DE MEDIDA Y ANALISIS DIMENSIONAL
se mide. El resultado de la medida de magnitud fısica escalar debe expresarse con una
cifra y una unidad. Y si es vectorial con dos o tres cifras (dependiendo del espacio
vectorial a que pertenezca) y una unidad.
1.2. Sistemas de unidades
La eleccion de una medida estandar con la cual comparar las mediciones de una
cierta magnitud es hasta cierto punto arbitraria. Sin embargo, algunos criterios son
convenientes para determinar si un patron de medida es adecuado para ser utilizado
con asiduidad. Caracterısticas deseables de un patron de medida son:
1. Estabilidad: el patron no debe variar con el tiempo. De este modo la medida de la
misma magnitud en diferentes instantes temporales debe dar el mismo resultado.
2. Reproducibilidad: el patron debe ser facilmente reproducible para que se pueda
utilizar en diversas circunstancias y lugares.
3. Aceptabilidad: el patron debe ser aceptado por la mayor cantidad posible de
usuarios. No es deseable la existencia de muchos patrones diferentes para una
misma magnitud.
4. Precision: el patron debe estar determinado con mucha mas precision que la que
se pretende para las medidas ordinarias en las que se utilice. De este modo se
evitan errores en la determinacion de esas medidas.
5. Accesibilidad: el patron debe ser facilmente accesible para cualquiera que pueda
necesitarlo.
6. Seguridad: el patron debe ser lo mas seguro posible para que no se deforme o
varıen sus propiedades debido a su utilizacion u otras razones.
La eleccion de un patron para cada una de las magnitudes fundamentales determina
un sistema de unidades. El sistema de unidades mas ampliamente aceptado en Fısica
es el denominado Sistema Internacional de Unidades (S.I.). Fue establecido en 1960

1.3. CONVERSION DE UNIDADES 13
Magnitud Unidad Sımbolo
longitud metro mmasa kilogramo kg
tiempo segundo scorriente electrica amperio A
temperatura kelvin Kcantidad de materia mol molintensidad luminosa candela cd
por un comite internacional. Las unidades en el S.I. de las magnitudes fundamentales
en Fısica 1 son las que se relacionan en la tabla adjunta. Cualquier otra magnitud fısica
se puede expresar en unidades del S.I. como combinacion de esas unidades basicas.
Otros sistemas de unidades que se utilizan ocasionalmente son el sistema cegesimal
(c.g.s.) y el sistema tecnico ingles. En el c.g.s., las unidades basicas son el centımetro
(cm), el segundo (s) y el gramo (g). En el sistema tecnico ingles , se toma como unidad
de fuerza patron la libra y a partir de ella se define la libra como unidad de masa (1
libra = 0, 454 kg). La longitud se expresa en pies (1 pie = 0, 3048 cm) y el tiempo en
segundos.
1.3. Conversion de unidades
Aunque siempre es recomendable expresar la medida de un magnitud en el S.I., en
algunas ocasiones es necesario convertir las unidades de un sistema a otro.
1.3.1 Ejemplo
~ Transformar 90 km/h a: m/s y millas/h .
90��km
��h1000
m
��km
1
3600s
��h
= 25 m/s
1Otras unidades de caracter geometrico en el S.I. son el radian (rd), unidad de angulo y el estereo-rradian (sr), unidad de angulo solido.

14 CAPITULO 1. SIST. DE MEDIDA Y ANALISIS DIMENSIONAL
90��km
h
1
1, 61��km
mi
= 55, 9mi
h
~ La masa de un cubo solido es 856 g y cada arista tiene una longitud de 5, 35 cm.
Determınese la densidad del cubo en unidades del S.I..
ρ =m
V
m = 856�g1
1000 �g
kg
= 0, 856 kg
V = l3 = 153, 13��cm3(
10−2 m
��cm
)3
= 1, 531× 10−4 m3
=⇒ ρ =0, 856 kg
1, 531× 10−4 m3= 5, 590× 103 kg
m3
1.4. Analisis dimensional
Cada magnitud fısica posee una cualidad propia que impide que pueda compararse
con otra magnitud distinta. Por eso no se puede decir que una cierta velocidad sea
mayor o menor que una densidad, velocidad y densidad son cosas intrınsecamente
diferentes. Y al serlo no pueden compararse. Como solo pueden compararse cantidades
de la misma magnitud, las ecuaciones de la Fısica deben expresar siempre la igualdad
de magnitudes de la misma especie.
A = B =⇒ A y B son comparables.
Se dice que esa ecuacion es dimensionalmente homogenea. El tipo de especie o
magnitud queda determinado por lo que se conoce en Fısica como dimension. Por
ejemplo, una longitud se puede simbolizar con la letra L. Y como una superficie es el
producto de dos longitudes se puede simbolizar como L2. Y un volumen como L3.
La masa es una magnitud que no puede reducirse a una longitud y por ello necesi-
tamos otro modo de referirnos a ella. Por ejemplo, denotamos su dimension por M . Es

1.4. ANALISIS DIMENSIONAL 15
indiferente que la masa a que nos refiramos sea la de un planeta, la de un atomo o la
de una persona. Aunque sus medidas seran distintas en cada caso, intrınsecamente la
magnitud es la misma. Igual sucede con el tiempo. Su dimension suele denotarse como
T .
Una densidad es una masa dividida por un volumen y se dice que dimensionalmen-
te es M/L3. La velocidad siempre es una longitud dividida por un tiempo. Se dice,
entonces, que dimensionalmente es LT−1. Otros ejemplos pueden ser:
aceleracion (a) → ∼ v
t−→ LT−2 se denota [a] = LT−2
fuerza (f) → ∼ ma −→ MLT−2 se denota [f ] = MLT−2
energıa (E) → ∼ f d −→ ML2T−2 se denota [E] = ML2T−2
Cualquier magnitud mecanica, por complicada que sea, se puede expresar dimensio-
nalmente en terminos de M , L y T . Podrıamos entonces definir el concepto dimension
como una forma sencilla de representar la dependencia de una magnitud cualquiera en
terminos de las magnitudes fundamentales.
Hay magnitudes que no tienen dimensiones. Se dice que son adimensionales. Por
ejemplo, un angulo es arcoradio
. Su dimension es L/L = L0. Otro ejemplo es cualquier
exponente de una funcion exponencial. Esto se debe a que al hacer el desarrollo en
serie de la funcion:
ex ' x+x3
3!+x5
5!+ . . . ,
esta ecuacion solo es homogenea si x es adimensional. No se puede sumar una fuerza con
una densidad. En general, cuando se representa una igualdad mediante una ecuacion
algebraica, ambos terminos deben ser dimensionalmente iguales para ser comparables:
A = B + C =⇒ [A] = [B] = [C]
Solo en este caso tiene sentido la suma y la igualdad. De este modo la ecuacion es
dimensionalmente homogenea.
Utilidades del analisis dimensional:
+ Comprobar si una ecuacion es correcta.

16 CAPITULO 1. SIST. DE MEDIDA Y ANALISIS DIMENSIONAL
+ Preveer como debe ser una relacion entre varias magnitudes.
1.4.1 Ejemplo
Compruebese si las siguientes ecuaciones son dimensionalmente correctas.
~ x = 12at2
[x] = L
[a] = LT−2
[t] = T
−→ L = L���T−2��T 2 =⇒ correcta
~ v2 = 2a(x− x0) + v20
v2 = (LT−1)2 = L2T−2
[a] = LT−2
[x] = [x0] = L
[v20] = [v2] = L2T−2
−→ L2T−2 = L2T−2 + L2T−2 =⇒ correcta
1.4.2 Ejemplo
2.- Determınense los exponentes desconocidos para que las siguientes ecuaciones sean
correctas.
~ E = 12mavb
[E] = ML2T−2
[mavb] = Ma(LT−1)b = MaLbT−b
−→ a = 1, b = 2 =⇒ E =1
2mv2

1.5. NOTACION CIENTIFICA Y ORDENES DE MAGNITUD 17
~ E = magbhc
[E] = ML2T−2
[magbhc] = Ma(LT−2)bLc = MaLb+cT−2b
−→ a = 1, b+ c = 2, 2b = −2 −→ b = 1, c = 1 =⇒ E = mgh
1.5. Notacion cientıfica y ordenes de magnitud
El manejo de numeros muy grandes o muy pequenos se simplifica notablemente
utilizando potencias de 10. En esta notacion, denominada cientıfica, un numero se
escribe como el producto de uno entre 0 y 10 y una potencia de 10. Para denominar
a las potencias se suelen utilizar los prefijos y abreviaturas que aparecen en la tabla
adjunta.
Multiplos Prefijo Abreviatura
1018 exa E1015 peta P1012 tera T109 giga G106 mega M103 kilo k102 hecto h101 deca da100 − −10−1 deci d10−2 centi c10−3 mili m10−6 micro µ10−9 nano n10−12 pico p10−15 femto f10−18 ato a
18 CAPITULO 1. SIST. DE MEDIDA Y ANALISIS DIMENSIONAL
Cuando se llevan a cabo calculos por aproximacion o comparaciones hay veces en
que se redondea un numero hasta la potencia de 10 mas proxima. Tal numero recibe el
nombre de orden de magnitud. Se podrıa definir entonces como la potencia de 10 mas
proxima a un cierto numero.
Por ejemplo, si la altura de una pared es 8 m, su potencia mas proxima es 101. Se
dice que su orden de magnitud es 10. Si la altura de una persona es de 1, 70 m, se dice
que el orden de magnitud de la altura es 100 = 1. Si la masa de un coche es 2000 kg,
se dice que su orden de magnitud, en kilos es 103. Sin embargo en toneladas serıa 1. El
orden de magnitud siempre esta asociado a un sistema de unidades.
Este concepto es muy importante puesto que aunque muchas veces sea difıcil estimar
el tamano, la masa de un objeto u otras magnitudes, es posible, con razonamientos
sencillos, estimar su orden de magnitud. Tambien es fundamental para razonar si el
resultado de la resolucion de un problema tiene sentido o no. Veamos algunos ejemplos
de ambos casos:
1.5.1 Ejemplo
} ¿Que espesor de la banda de rodadura de un neumatico se desgasta en un recorrido
de 1 km?
Supongamos que el espesor del neumatico nuevo es 1 cm. Quizas no sea ese, sino
2 o 3 cm, pero seguro que no es 1 mm ni 10 cm. Su orden de magnitud puede ser
1 cm.
Si los neumaticos deben cambiarse cada 60000 kms, consideremos que la banda
esta completamente gastada despues de esos km. Entonces:
1 cm
60000 km= 1, 7× 10−5 cm
km−→ O.M. : 10−5 cm
km
} Estımese el grosor de las hojas de un libro.
Supongamos que el libro tiene aproximadamente 500 paginas, es decir, 250 hojas
de papel. Si su espesor (sin contar las portadas) es 2 cm, resulta:

1.5. NOTACION CIENTIFICA Y ORDENES DE MAGNITUD 19
g =0, 02
250= 8× 10−5 m = 0, 08 mm −→ O.M. : 10−1 mm
} Supongase que en la resolucion de un problema de Termodinamica se obtiene que
la temperatura de ebullicion del agua es ' 104 K. ¿Tiene sentido, o no?
} En un problema se pide calcular la potencia necesaria que debe suministrar el mo-
tor de un coche para ascender una pendiente del 10 %. ¿De que orden de magnitud
sera esa potencia?
} Si en un problema nos piden calcular el orden de magnitud de la masa de un
proton, ¿cual debe ser?
} Estımese el numero de peluqueros que hay en Madrid (¡de hombres!).
Cada peluquero trabaja 10 h/dıa y cada hombre tarda 0,5 h en cortarse el pelo.
Entonces cada peluquero corta el pelo a 20 hombres/dıa.
Si en Madrid hay 1 millon de hombres y se cortan el pelo en promedio cada 3
meses. En tres meses un peluquero corta el pelo a:
20× 30× 3 = 1800 ' 2× 103 hombres/3 meses
106
2× 103=
1
2× 103 peluqueros

20 CAPITULO 1. SIST. DE MEDIDA Y ANALISIS DIMENSIONAL
Ejemplos de algunos ordenes de magnitud:
Longitud (m) Masa (kg)
radio del proton 10−15 electron 10−30
radio del atomo 10−10 proton 10−27
radio de una celula 10−5 celula 10−12
altura de una persona 100 gota de lluvia 10−6
altura de una montana 104 hormiga 10−2
radio de la Tierra 107 persona 102
radio del Sol 109 Tierra 1024
distancia Tierra-Sol 1011 Sol 1030
radio de la Vıa Lactea 1021 Vıa Lactea 1041
Tiempo (s)
tiempo que tarda la luz en atravesar un nucleo 10−23
periodo de la radiacion de la luz visible 10−15
periodo de la radiacion de microondas 10−10
periodo de la nota musical Do 10−2
periodo de las pulsaciones del corazon humano 101
periodo de la rotacion terrestre (1 dıa) 105
periodo de la revolucion terrestre (1 ano) 107
vida media de una persona 109
vida media de una cordillera 1015
edad de la Tierra 1017
edad del Universo 1018

1.6. PROBLEMAS 21
1.6. Problemas
1. En una carretera de Estados Unidos, el lımite de velocidad marca 55 millas/hora.
¿Cual serıa la velocidad lımite equivalente en una carretera espanola?
(Respuestas : 88,5 km/h)
2. El radio de una esfera en centımetros es 0,3. ¿Cuales serıan su superficie y su
volumen en el SI?
(Respuestas : S = 1,13× 10−4 m2; V = 1,13× 10−7 m3)
3. Una estacion meteorologica marca una presion atmosferica de 775 mmHg. ¿A
cuantas atmosferas corresponde esa presion? ¿Corresponde esa medida al SI?
(Respuestas : P = 1,02 atm; P = 1,03× 105 Pa)
4. Comprueba si las siguientes ecuaciones son dimensionalmente correctas:
x = vt; m = ρV ; V = V0e−k; T = 2π
√l
g
x = vt+at2
2; a =
v2
r; A =
(x2
0 +v2
0
ω2
)2
v2 = 2a(x− x1) + v21; r =
v20 sen 2θ0
g; ~l = ~r × ~p
5. Haciendo uso de analisis dimensional, calcula n, m y p para que las siguientes
ecuaciones tengan sentido:
a)
a = k rnvm,
donde k es una constante adimensional.
b)
F cos θ = mg (1− α) cosλ,
donde α ∼ RmT g
n T pT .
(Respuestas : a) m = 2; n = −1; b) m+ n = 0 −2n+ p = 0. La solucion no es
unica.)

22 CAPITULO 1. SIST. DE MEDIDA Y ANALISIS DIMENSIONAL
6. ¿Cuales deben ser las dimensiones de los parametros C1 y C2 para que las si-
guientes ecuaciones sean dimensionalmente correctas?
x = C1 + C2t; x = C1 cosC2t
x =1
2C1t
2; v = C1e−C2t; v2 = 2C1x.
7. Halla las dimensiones de la constante G de la gravitacion universal, sabiendo que:
~Fg = Gm1m2
r2~u.
(Respuestas : [G] = M−1L3T−2)
8. Un objeto situado en el extremo de una cuerda se mueve segun un cırculo. La
fuerza ejercida por la cuerda depende de la masa del objeto, de su velocidad y
del radio del cırculo. ¿Que combinacion de estas variables ofrece las dimensiones
correctas de la fuerza?
(Respuestas : F ∼ mv2
r)
9. Utilizando notacion cientıfica, calcula:
150000× 3000000
0, 0005× 2000
3200
16
4800× 0, 002× 1
10000
10. Sabiendo que la distancia entre Nueva York y Los Angeles es de 4800 kms y que
hay una diferencia horaria de 3 horas, estima la circunferencia de la Tierra.
(Respuestas : l ' 40,000 km)
11. Sabiendo que la velocidad de salida por un pequeno orificio practicado en la pared
de un deposito es proporcional a la distancia vertical (h) del centro del orificio
a la superficie del lıquido y a la aceleracion de la gravedad (g), dudamos si esa

1.6. PROBLEMAS 23
velocidad depende tambien de la densidad del lıquido. ¿Se puede resolver esta
duda utilizando analisis dimensional?
(Respuestas : v ∼ (gh)1/2)
12. Supongamos que un helicoptero es capaz de quedarse suspendido en el aire cuando
sus motores desarrollan una potencia, P . Un segundo helicoptero tiene la mitad de
tamano que el primero, pero los mismos motores. ¿Que potencia deben desarrollar
sus motores para mantenerse suspendido?
(Respuestas : P2 ' 0,09P )


Parte I
Fundamentos de Mecanica Clasica


Capıtulo 2
Cinematica de una partıcula
2.1. Introduccion
La Mecanica es una parte de la Fısica que tiene por objeto estudiar el estado de
movimiento de los cuerpos, buscar sus causas y establecer las leyes que rigen estos
movimientos. Dependiendo de la naturaleza del estudio, la Mecanica se divide en dos
partes Cinematica y Dinamica. La Cinematica estudia de forma generica el movimiento
independientemente de las causas que lo producen. Sin embargo, la Dinamica atiende
tambien a las causas que lo provocan. Dentro de la Dinamica, existe otra parte, de
especial interes en Ingenierıa, denominada Estatica . Trata de estudiar en que circuns-
tancias los cuerpos estan en reposo, aunque esten sometidos a varias fuerzas.
Los elementos basicos de la Cinematica son el espacio, el tiempo y el movil. La
Cinematica Clasica admite la existencia de un espacio y un tiempo absolutos y con-
tinuos. Este espacio es independiente de los objetos materiales que contiene. Postula
tambien la existencia de un tiempo absoluto que transcurre del mismo modo en todo
el Universo y que es el mismo para todos los observadores, independientemente de su
estado de movimiento. De este modo el tiempo se puede representar como una variable
real.
Aunque en este curso nosotros nos dedicaremos esencialmente al estudio de la
Mecanica Clasica, cabe decir que existen otros modos dentro de la Fısica de enten-
der el espacio y el tiempo. En Mecanica Relativista esos conceptos no son absolutos
sino que estan relacionados entre sı y con el observador y su estado de movimiento.
28 CAPITULO 2. CINEMATICA DE UNA PARTICULA
Es la mecanica apropiada para el estudio de problemas en que aparecen velocidades
proximas a la de la luz. Existe otro tipo de descripcion mecanica de la naturaleza apro-
piada para sistemas de dimensiones pequenas, como atomos y nucleos. Se denomina
Mecanica Cuantica. En ella la posicion y la velocidad de una partıcula no se pueden
determinar simultaneamente con precision arbitraria (Principio de Incertidumbre).
Un cuerpo cualquiera puede considerarse como un punto material o como una
partıcula cuando sus dimensiones son despreciables frente a las dimensiones de sus des-
plazamientos. Ası por ejemplo, la Tierra puede considerarse como un objeto puntual al
estudiar su movimiento respecto al sol, puesto que su diametro son aproximadamente
10,000 km y la distancia media al sol son 1013 km. Es por lo tanto, un concepto relativo
relacionado con el observador.
En Mecanica se considera que un cuerpo esta en movimiento cuando su posicion
cambia en el espacio con relacion a otros que consideramos fijos y que sirven de refe-
rencia. Pero tambien puede suceder que no solo el cuerpo se mueva sino que tambien
lo haga el sistema de referencia. Por lo tanto, el concepto de movimiento siempre tiene
un sentido relativo. El mejor modo de establecer la relacion entre el cuerpo en estudio
y su referencial es utilizando un sistema de coordenadas. Para un punto material bas-
tara determinar sus coordenadas, pero para un cuerpo extenso habra que determinar
las coordenadas de todos sus puntos.
Se dice que el movimiento del punto material es unidimensional si queda perfec-
tamente determinado por una unica coordenada, x = x(t). Esa ecuacion matematica
describe la trayectoria del cuerpo. A cada valor de la variable temporal, t, se le asig-
na unıvocamente una posicion de la partıcula. Este tipo de movimiento se denomina
a veces rectilıneo. Existen muchos movimientos reales, que tienen lugar en el espacio
tridimensional ordinario, que pueden entenderse como unidimensionales, pues de algun
modo solo una de las coordenadas de posicion varıa apreciablemente en el tiempo.
Ejemplos de esto son un movimiento de caıda libre o el de un tren sobre unos raıles
en lınea recta. En otras ocasiones es necesario estudiar la evolucion de dos coordena-
das para describir correctamente la evolucion de la partıcula. En este caso es como si
el movimiento tuviera lugar sobre una superficie plana (bidimensional). Ejemplos de

2.2. MOVIMIENTO EN UNA DIMENSION 29
estos movimientos son el de una bola de billar sobre una mesa o el de un proyectil. En
general, para describir el movimiento de una partıcula en el espacio tridimensional se
requiere una trayectoria de la forma: x = x(t), y = y(t) y z = z(t). Expresado en forma
vectorial, el vector de posicion de la partıcula es una funcion del tiempo de la forma:
~r = ~r(t).
2.2. Movimiento en una dimension
2.2.1. Velocidad media
Consideremos una partıcula o punto material moviendose sobre una lınea recta
representada por la coordenada x. Supongamos que en el instante ti se encuentra en la
posicion xi y en el tf en la posicion xf .
Se define la velocidad media de la partıcula en ese intervalo de tiempo como:
v =xf − xitf − ti
≡ ∆x
∆t[v] = LT−1
∆x
∆t
x
tti tf
xi
xf
α
x(t)
La velocidad media es independiente de la trayectoria seguida por la partıcula, solo
depende del espacio recorrido y el tiempo transcurrido. Si una partıcula parte de un
determinado punto y vuelve a el despues de un tiempo, su velocidad media en ese
intervalo es cero. Geometricamente, la velocidad media representa la pendiente de la
recta que une los puntos inicial y final.
v =∆x
∆t= tanα.

30 CAPITULO 2. CINEMATICA DE UNA PARTICULA
2.2.2. Velocidad instantanea
La velocidad de la partıcula en un instante de tiempo cualquiera se denomina ve-
locidad instantanea. Es un concepto importante especialmente cuando la velocidad
media en diferentes intervalos de tiempo no es constante. Para determinarla debemos
hacer el intervalo temporal tan pequeno como sea posible de modo que esencialmente
no tengan lugar cambios en el estado de movimiento durante ese pequeno intervalo.
Matematicamente:
v = lım∆t→0
v = lım∆t→0
∆x
∆t=dx
dt=⇒ v(t) =
dx(t)
dt.
x
t
xi
ti t +∆ti
∆t
0
x(t)
La interpretacion geometrica se puede entender a partir de la figura. Cuando ∆t→0, el cociente, ∆x/∆t, representa la pendiente de la recta tangente a la curva, x(t), en
el instante ti.
Una vez conocida la velocidad como funcion del tiempo, v = v(t), es posible deter-
minar la posicion de la partıcula en cualquier instante sin mas que utilizar el concepto
de integral.
v =dx
dt−→ v dt = dx −→
∫ x
x0
dx =
∫ v
v0
v(t) dt
=⇒ x = x0 +
∫ t
t0
v(t) dt (2.1)
A partir de esto, el desplazamiento, x−x0, se puede interpretar geometricamente como
el area bajo la curva v = v(t).

2.2. MOVIMIENTO EN UNA DIMENSION 31
2.2.3. Aceleracion
Cuando la velocidad de una partıcula permanece constante se dice que realiza un
movimiento uniforme, pero en general la velocidad puede variar con el tiempo. Supon-
gamos una partıcula que en el instante ti tiene velocidad vi y en el tf velocidad vf . Se
define la aceleracion media en ese intervalo como :
a =vf − vitf − ti
=∆v
∆t
De esa ecuacion se deduce que las dimensiones de esta nueva magnitud son, [a] = LT−2.
En algunos casos la aceleracion media es diferente en distintos intervalos temporales
y conviene entonces definir una aceleracion instantanea como lımite de la aceleracion
media en un intervalo temporal muy pequeno.
a = lım∆t→0
a = lım∆t→0
∆v
∆t=dv
dt=⇒ a(t) =
dv(t)
dt.
Si conocemos la aceleracion instantanea, a = a(t), podemos calcular la velocidad ins-
tantanea, v = v(t), ası:
a(t) =dv
dt−→ dv = a dt −→
∫ v
v0
dv =
∫ t
t0
a dt =⇒ v(t) = v0 +
∫ t
t0
a(t) dt.
(2.2)
La aceleracion, en general, se puede relacionar con la posicion del siguiente modo:
a(t) =dv
dt=
d
dt
(dx
dt
)=d2x
dt2=⇒ a(t) =
d2x
dt2.
Una relacion importante entre velocidad y aceleracion se obtiene ası:
a =dv
dt−→ dv = a dt −→ v dv = av dt = a
dx
��dt��dt =⇒ v dv = a dx∫ v
v0
v dv =
∫ x
x0
a dx =⇒ v2 = v20 + 2
∫ x
x0
a(x) dx (2.3)
2.2.4. Ejemplos particulares: movimientos uniforme y unifor-memente acelerado
Dos casos analıticamente sencillos son el movimiento uniforme y el movimiento
uniformemente acelerado . El primero se produce cuando v ≡ v0 =cte. y el segundo
cuando a ≡ a0 =cte.

32 CAPITULO 2. CINEMATICA DE UNA PARTICULA
En el caso particular v = v0 =cte., la integral (2.1) es trivial y resulta:
x = x0 + v0
∫ t
t0
dt = x0 + v0(t− t0),
que es la relacion que liga posicion con tiempo en un movimiento unidimensional uni-
forme.
Si la aceleracion es constante, a = a0 =cte. En este caso a 6= a(t) y a partir de (2.2),
v = v0 + a0
∫ t
t0
dt = v0 + a0(t− t0) =⇒ v(t) = v0 + a0(t− t0). (2.4)
Utilizando las ecuaciones (2.1) y (2.4) tambien se puede obtener para el caso de movi-
miento uniformemente acelerado:
x = x0 +
∫ t
t0
[v0 + a0(t− t0)] dt = x0 + v0(t− t0) +1
2a0(t− t0)2.
Por ultimo, a partir de (2.3) se obtiene:
v2 = v20 + 2a0(x− x0).
En la figura adjunta se resumen las interpretaciones geometricas de las ecuaciones que
hemos obtenido para el movimiento uniforme y uniformemente acelerado.
+ Movimiento uniforme:
a = 0
v ≡ v0 = cte.
x = x0 + v0(t− t0)
v
t
v= cte. a=0
x-x0
tt0
x
t0
x0
~ v
t
x
t
0
2.2. MOVIMIENTO EN UNA DIMENSION 33
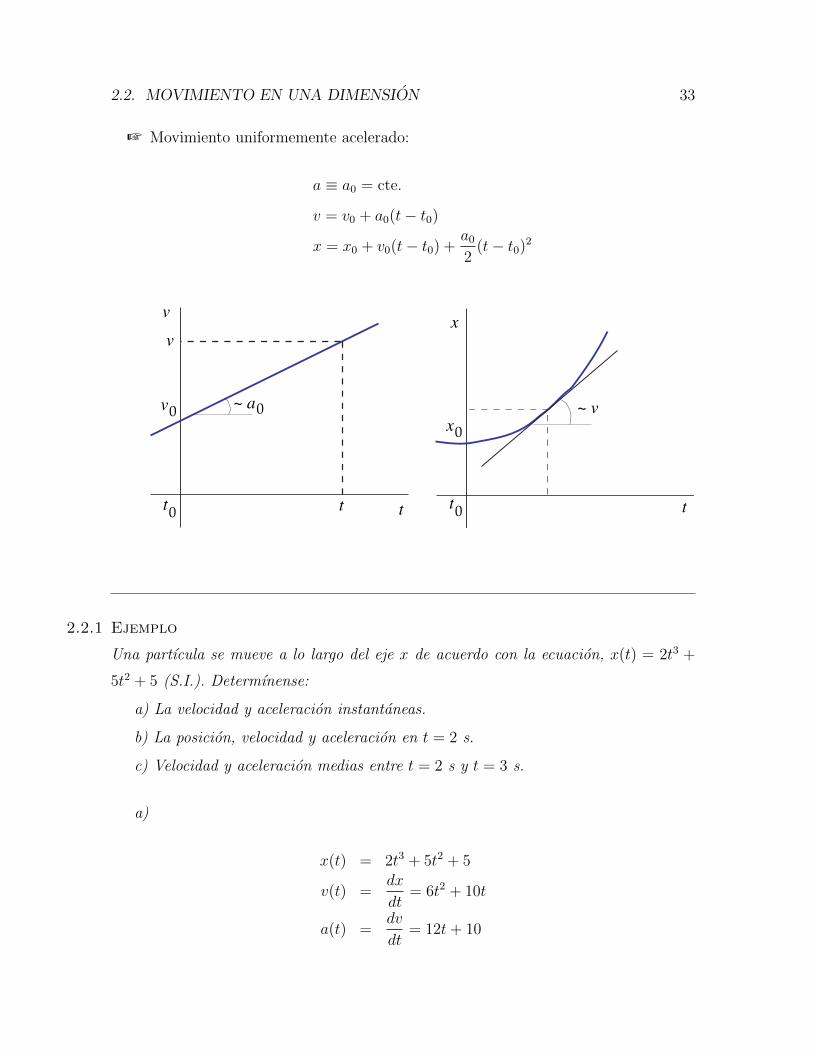
+ Movimiento uniformemente acelerado:
a ≡ a0 = cte.
v = v0 + a0(t− t0)
x = x0 + v0(t− t0) +a0
2(t− t0)2
v
t0
v0
~ a
t
~ v
x
tt0
x0
t
v
0
2.2.1 Ejemplo
Una partıcula se mueve a lo largo del eje x de acuerdo con la ecuacion, x(t) = 2t3 +
5t2 + 5 (S.I.). Determınense:
a) La velocidad y aceleracion instantaneas.
b) La posicion, velocidad y aceleracion en t = 2 s.
c) Velocidad y aceleracion medias entre t = 2 s y t = 3 s.
a)
x(t) = 2t3 + 5t2 + 5
v(t) =dx
dt= 6t2 + 10t
a(t) =dv
dt= 12t+ 10

34 CAPITULO 2. CINEMATICA DE UNA PARTICULA
b) En t = 2 s,
x = 2,23 + 5,22 + 5 = 41 m
v = 24 + 20 = 44 m/s
a = 34 m/s2
c) En el intervalo t = 2 s → 3 s,
a =vf − vitf − ti
=84− 44
1= 40 m/s2
v =xf − xitf − ti
=104− 41
1= 63 m/s
2.2.2 Ejemplo
La aceleracion de un cuerpo que se desplaza a lo largo del eje x viene dada en funcion
de su posicion por a(x) = 4x − 2 (S.I.). Suponiendo que v0 = 10 m/s cuando x = 0,
obtengase la velocidad en cualquier otra posicion.
a(t) =dv
dt−→ dv = a(t)dt −→ v dv = av dt = a
dx
��dt��dt
=⇒ v dv = a dx,
con lo que integrando:∫ v
v0
v dv =
∫ x
x0
a dx =⇒ v2 = v20 + 2
∫ x
x0
a(x) dx.
En este caso:
v2 = v20 + 2
∫ x
x0
(4x− 2) dx = v20 + 2(2x2 − 2x) =⇒ v(x) = [100 + 4x(x− 1)]1/2 .

2.2. MOVIMIENTO EN UNA DIMENSION 35
2.2.3 Ejemplo
Caıda libre.
Es un hecho experimental que todo objeto en las proximidades de la superficie te-
rrestre adquiere una aceleracion aproximadamente g = 9,81 m/s2 cuando se deja en
libertad (supondremos que no hay rozamientos y que g no varıa con la latitud, altitud
u otros factores). Tomando como origen la superficie terrestre y coordenadas positivas,
y, hacia arriba, la aceleracion sera negativa, a = −g, y las ecuaciones de movimiento
adecuadas las de un movimiento uniformemente acelerado. Particularizadas a este caso
tomaran la forma:
v(t) = v0 − g(t− t0)
y(t) = y0 + v0(t− t0)− 1
2g(t− t0)2
v2(y) = v20 − 2g(y − y0)
Un ejemplo de aplicacion de estas ecuaciones de movimiento podrıa ser el siguiente.
Se lanza un cuerpo verticalmente hacia arriba con una velocidad de 98 m/s desde
el techo de un edificio de 100 m de altura. Obtenganse:
a) La maxima altura que alcanza sobre el suelo y el tiempo que tarda en llegar a
ella.
b) La velocidad con que llega al suelo y el tiempo total transcurrido hasta que llega
a el.
a)-b)
t0 = 0; v0 = 98m/s; y0 = 100m; a = −g
Altura maxima: v = 0 −→ v0 = g tmax −→ ymax = y0 + v0tmax − 12g t2max
tmax =v0
g= 10 s
ymax = 590m
c)-d) Al llegar al suelo y = 0:
0 = y0 + v0t−1
2gt2
resolviendo−−−−−−→
{t = −0,96 s (sin sentido fısico)
tt = 20,96 s

36 CAPITULO 2. CINEMATICA DE UNA PARTICULA
vt = v0 − g tt = −107,41m/s
2.3. Movimiento en dos y tres dimensiones
2.3.1. Velocidad
Supongamos ahora una partıcula moviendose en el espacio. Denotamos su posicion
en cada instante de tiempo por medio de un vector posicion ~r = ~r(t). En coordenadas
cartesianas, la ecuacion de la trayectoria vendra dada por: x = x(t), y = y(t) y z = z(t).
En el caso de movimiento en un plano, las dos primeras ecuaciones son suficientes para
describir el movimiento de la partıcula.
Si la posicion de la partıcula en el instante ti viene dada por ~ri y en el tf por ~rf , se
define su velocidad media en ese intervalo temporal como:
~v =~rf − ~ritf − ti
=∆~r
∆t(2.5)
r i
r f
ti
tf
∆r
z
x
y
r(t)
~v es un vector paralelo al desplazamiento ∆~r. Para definir la velocidad instantanea
basta tomar el lımite cuando el intervalo temporal tiende a cero.
~v = lım∆t→0
∆~r
∆t=d~r
dt(2.6)
2.3. MOVIMIENTO EN DOS Y TRES DIMENSIONES 37
En componentes tomara la forma:
~v =dx
dt~i+
dy
dt~j +
dz
dt~k = vx~i+ vy~j + vx ~k.
La velocidad instantanea sera un vector tangente a la trayectoria curvilınea, es decir,
se puede expresar: ~v =| ~v | ~ut, donde ~ut es un vector unitario tangente a la trayectoria.
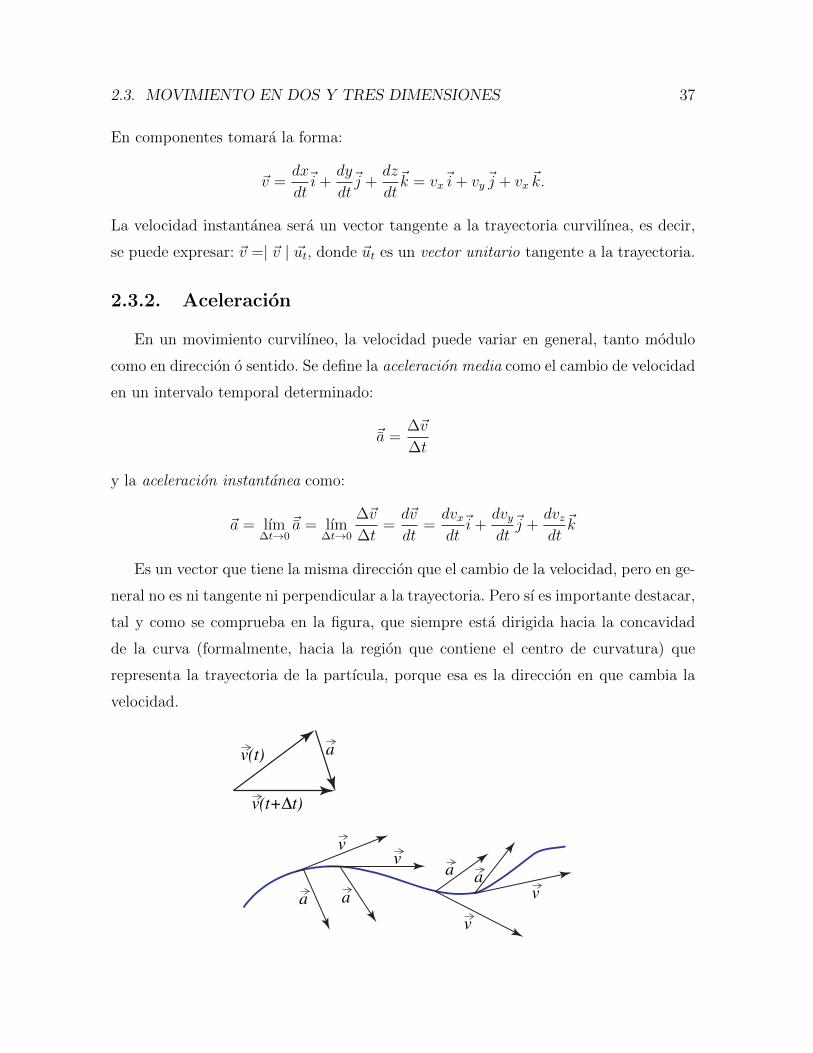
2.3.2. Aceleracion
En un movimiento curvilıneo, la velocidad puede variar en general, tanto modulo
como en direccion o sentido. Se define la aceleracion media como el cambio de velocidad
en un intervalo temporal determinado:
~a =∆~v
∆t
y la aceleracion instantanea como:
~a = lım∆t→0
~a = lım∆t→0
∆~v
∆t=d~v
dt=dvxdt~i+
dvydt~j +
dvzdt~k
Es un vector que tiene la misma direccion que el cambio de la velocidad, pero en ge-
neral no es ni tangente ni perpendicular a la trayectoria. Pero sı es importante destacar,
tal y como se comprueba en la figura, que siempre esta dirigida hacia la concavidad
de la curva (formalmente, hacia la region que contiene el centro de curvatura) que
representa la trayectoria de la partıcula, porque esa es la direccion en que cambia la
velocidad.
v(t)
v(t+∆t)
a
a a
vv
v
v
aa

38 CAPITULO 2. CINEMATICA DE UNA PARTICULA
La aceleracion instantanea tambien se puede expresar ası:
~a =d~v
dt=
d
dt
(d~r
dt
)=d2~r
dt2=
(d2x
dt2,d2y
dt2,d2z
dt2
).
2.3.1 Ejemplo
Una partıcula se desplaza en el espacio y su vector posicion, en cada instante de tiempo,
toma en el SI la siguiente forma:
~r(t) = (t2 − 2)~i+ cos t~j + e2t ~k
Obtenganse:
a) La velocidad en cualquier instante de tiempo, ~v(t).
b) La velocidad inicial de la partıcula y su velocidad en t = 1 s.
c) Su aceleracion, ~a(t).
d) Su aceleracion en el instante inicial y su modulo.
a)
~v(t) =d~r
dt= 2t~i− sen t~j + 2e2t ~k
b)
~v(0) = (0, 0, 2) ~v(1) = (2,− sen 1, 2e2)
c)
~a(t) =d~v
dt= 2~i− cos t~j + 4e2t ~k
b)
~a(0) = (2,−1, 4)
|~a| = (22 + 1 + 42)1/2 = 4,58
2.3. MOVIMIENTO EN DOS Y TRES DIMENSIONES 39
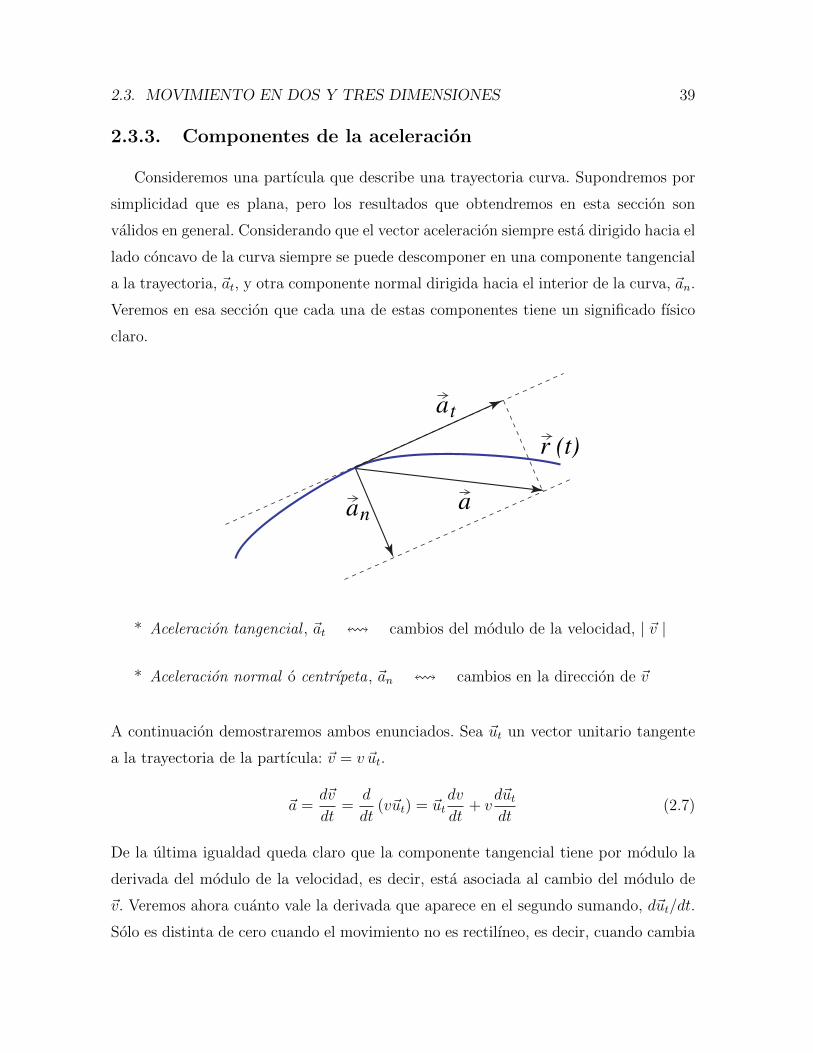
2.3.3. Componentes de la aceleracion
Consideremos una partıcula que describe una trayectoria curva. Supondremos por
simplicidad que es plana, pero los resultados que obtendremos en esta seccion son
validos en general. Considerando que el vector aceleracion siempre esta dirigido hacia el
lado concavo de la curva siempre se puede descomponer en una componente tangencial
a la trayectoria, ~at, y otra componente normal dirigida hacia el interior de la curva, ~an.
Veremos en esa seccion que cada una de estas componentes tiene un significado fısico
claro.
a
ta
na
r (t)
* Aceleracion tangencial , ~at ! cambios del modulo de la velocidad, | ~v |
* Aceleracion normal o centrıpeta, ~an ! cambios en la direccion de ~v
A continuacion demostraremos ambos enunciados. Sea ~ut un vector unitario tangente
a la trayectoria de la partıcula: ~v = v ~ut.
~a =d~v
dt=
d
dt(v~ut) = ~ut
dv
dt+ v
d~utdt
(2.7)
De la ultima igualdad queda claro que la componente tangencial tiene por modulo la
derivada del modulo de la velocidad, es decir, esta asociada al cambio del modulo de
~v. Veremos ahora cuanto vale la derivada que aparece en el segundo sumando, d~ut/dt.
Solo es distinta de cero cuando el movimiento no es rectilıneo, es decir, cuando cambia

40 CAPITULO 2. CINEMATICA DE UNA PARTICULA
la direccion de la velocidad. Atendiendo al esquema adjunto se puede expresar:
~ut = cosϕ~i+ senϕ~j
~un = cos(π
2− ϕ)~i+ sen(
π
2− ϕ)~j =
= − senϕ~i+ cosϕ~j
tunu
r (t)
c
x
x
y
dϕdϕ
ϕπ/2-ϕ
tu
ρ
ρds
Derivando la primera ecuacion:
d~utdt
= − senϕdϕ
dt~i+ cosϕ
dϕ
dt~j =
dϕ
dt~un. (2.8)
Luego d~ut/dt es un vector normal a la curva. Calcularemos ahora su modulo. Sea
ds el arco que se desplaza la partıcula en dt:
dϕ
dt=dϕ
ds
ds
dt= v
dϕ
ds,
y sea ρ el radio de curvatura local de la trayectoria:
ds = ρdϕ → dϕ
ds=
1
ρ→ dϕ
dt=v
ρ.

2.3. MOVIMIENTO EN DOS Y TRES DIMENSIONES 41
Sustituyendo en las ecuaciones (2.7)-(2.8) resulta:
~a ≡ ~at + ~an =dv
dt~ut +
v2
ρ~un.
Es sencillo demostrar que: at = ~a.~ut y an = (~ut × ~a)× ~ut.De esta manera hemos descompuesto la aceleracion en una componente tangente a
la trayectoria, ~at, y asociada a la variacion del modulo de la velocidad y otra normal,
~an, dirigida hacia el centro local de curvatura, asociada a la variacion de la direccion
de la velocidad. En el caso particular de un movimiento rectilıneo, la direccion de la
velocidad es constante y entonces la componente normal es nula. En el caso de un
movimiento uniforme es nula la componente tangencial.
El modulo de la aceleracion en general se puede expresar como:
a = (a2t + a2
n)1/2 =
[(dv
dt
)2
+
(v2
ρ
)2]1/2
.
2.3.4. Ejemplos particulares
Movimiento circular
Consideremos ahora el caso particular de un movimiento plano con trayectoria
circular. Si el radio de la circunferencia es R, y el arco recorrido, s, abarca un angulo
θ, s = Rθ.
~v = v~ut =ds
dt~ut −→ v =
ds
dt= R
dθ
dt
La funcion dθ/dt se denomina velocidad angular y se suele denotar como ω. Sus dimen-
siones y unidades en el S.I. son:
[ω] = T−1; S.I. −→ rad
s
Con esta definicion: v = ωR. La velocidad angular tambien se puede definir como una
magnitud vectorial, asociandole una direccion y sentido. Por definicion se considera
su direccion como perpendicular al plano del movimiento y su sentido el dado por la
regla de la mano derecha en funcion del sentido del movimiento, tal y como muestra la
figura.

42 CAPITULO 2. CINEMATICA DE UNA PARTICULA
z
x
y
R
ω
v
rγ
R = r sen γ −→ v = ωr sen γ; ~ω =dθ
dt~k =⇒ ~v = ~ω × ~r.
Esta relacion solo es valida para el movimiento circular, porque solo en el r y γ son
constantes.
Existe un caso de movimiento circular especialmente sencillo. Es aquel en que la
velocidad angular permanece constante. Se denomina movimiento circular uniforme. Es
un movimiento periodico puesto que la partıcula vuelve a pasar cada cierto tiempo por
el mismo punto. Para este tipo de movimiento es util definir los siguientes conceptos.
- Periodo, T : tiempo que tarda la partıcula en regresar al mismo punto. Si la
partıcula realiza n revoluciones en un tiempo t, T = t/n. Sus dimensiones son
[T ] = T .
- Frecuencia, ν: numero de revoluciones por unidad de tiempo, ν = 1/T . Sus
dimensiones son [ν] = T−1 y su unidad en el S.I. es s−1 que recibe el nombre de
herzio (Hz).
Para este tipo de movimiento (ω ≡ ω0 = cte.) es sencillo obtener la posicion angular
de la partıcula a partir de la definicion de ω:
ω =dθ
dt−→
∫ θ
θ0
dθ =
∫ t
t0
ω0 dt = ω0
∫ t
t0
dt =⇒ θ(t) = θ0 + ω0(t− t0).

2.3. MOVIMIENTO EN DOS Y TRES DIMENSIONES 43
Si se toma la condicion inicial, θ0 = 0 en t0 = 0, resulta: θ = ω0t. Tras una vuelta
completa a la circunferencia:
t = T ; θ = 2π −→ 2π = ω0t −→ ω0 =2π
T= 2πν.
Consideremos ahora el caso en que la velocidad angular de la partıcula cambia con el
tiempo. Se define la aceleracion angular como:¡
~α =d~ω
dt.
Como el movimiento tiene lugar en un plano, la direccion de ~ω no varıa y se verifica la
ecuacion anterior tambien para los modulos de las magnitudes involucradas.
α =dω
dt=d2θ
dt2.
Si α es constante el movimiento se denomina circular uniformemente acelerado. En
este caso, α ≡ α0 = cte.:
∫ ω
ω0
dω =
∫ t
t0
α0 dt = α(t− t0) =⇒ ω(t) = ω0 + α0(t− t0).
Esta ecuacion es analoga a la correspondiente para el movimiento rectilıneo uni-
formemente acelerado.
ω =dθ
dt=⇒ θ − θ0 =
∫ t
t0
ω dt =
∫ t
t0
[ω0 + α0(t− t0)] dt.
Resolviendo la integral resulta:
θ = θ0 + ω0(t− t0) +1
2α0(t− t0)2.
Todas estas ecuaciones son como en el movimiento lineal en una dimension, sin mas
que hacer las sustituciones:
x −→ θ
v −→ ω
a −→ α (2.9)

44 CAPITULO 2. CINEMATICA DE UNA PARTICULA
Veamos ahora como son las componentes de la aceleracion en el caso del movimiento
circular:
at =dv
dt= R
dω
dt= R
d2θ
dt2= Rα
an =v2
R= ω2R
En el movimiento circular uniforme, at = 0 pero an 6= 0. En este caso ademas se
puede calcular la aceleracion de otro modo:
~v = ~ω × ~r −→ d~v
dt= ~a = ~ω × d~r
dt= ~ω × ~v,
porque d~ω/dt = 0. Entonces,
~a = ~ω × (~ω × ~r).
Movimiento parabolico
Uno de los casos particulares mas interesantes de movimiento uniformemente acele-
rado es el estudio del movimiento de proyectiles. Es simplemente el caso de movimiento
plano en que la aceleracion es la debida a la fuerza gravitatoria. A diferencia del mo-
vimiento de caıda libre en este caso consideramos que la velocidad inicial, ~v0, puede
formar un cierto angulo con la horizontal y ası el movimiento tiene dos componentes.
Igual que hicimos en el movimiento de caıda libre, despreciando las fuerzas de
rozamiento y las anomalıas gravitatorias, podemos considerar que la aceleracion gra-
vitatoria es aproximadamente constante y se puede expresar como ~a = ~g = −g~j. Si
el proyectil se lanza con una velocidad inicial ~v0 que forma un angulo α con el eje
x, su movimiento bidimensional es una composicion de un movimiento uniforme en
el eje horizontal (donde no hay ninguna aceleracion) y un movimiento uniformemente
acelerado en el eje vertical.
2.3. MOVIMIENTO EN DOS Y TRES DIMENSIONES 45
x
y
v (t)
v0
α
g
v=v 0x
v(t)
v0x
v (t)y
R
ym
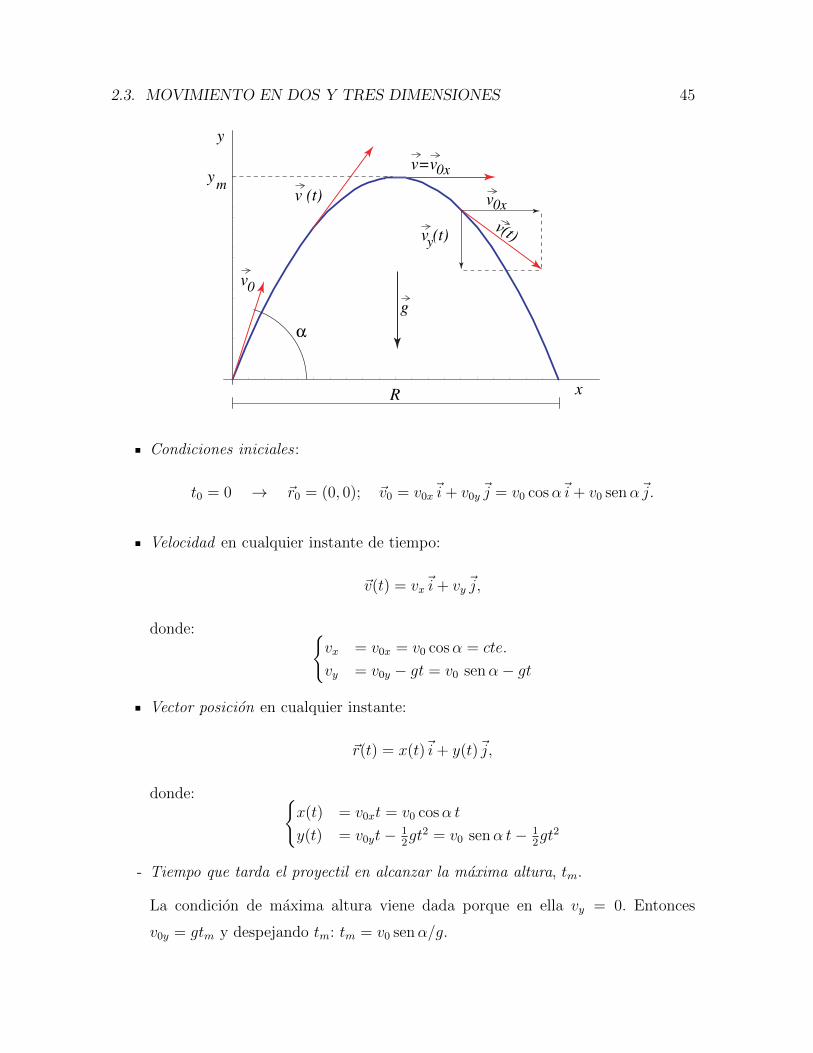
Condiciones iniciales :
t0 = 0 → ~r0 = (0, 0); ~v0 = v0x~i+ v0y
~j = v0 cosα~i+ v0 senα~j.
Velocidad en cualquier instante de tiempo:
~v(t) = vx~i+ vy~j,
donde: {vx = v0x = v0 cosα = cte.
vy = v0y − gt = v0 senα− gt
Vector posicion en cualquier instante:
~r(t) = x(t)~i+ y(t)~j,
donde: {x(t) = v0xt = v0 cosα t
y(t) = v0yt− 12gt2 = v0 senα t− 1
2gt2
- Tiempo que tarda el proyectil en alcanzar la maxima altura, tm.
La condicion de maxima altura viene dada porque en ella vy = 0. Entonces
v0y = gtm y despejando tm: tm = v0 senα/g.

46 CAPITULO 2. CINEMATICA DE UNA PARTICULA
- Altura maxima, ym.
Basta sustituir tm en la ecuacion que da y = y(t).
ym = y(tm) = v0 senα
(v0 senα
g
)− 1
2g
(v0α
g
)2
=⇒ ym =1
2
v20 sen2 α
g
- Tiempo de vuelo, tv.
Se define como el tiempo que tarda el proyectil en volver a la altura inicial, y = 0.
0 = v0 senα t− 1
2gt2 =⇒ tv =
2v0 senα
g= 2tm
- Alcance, R.
Es la distancia horizontal total que recorre el proyectil, R = x(tv).
R = x(tv) = v0x2v0 senα
g=v2
0
g(2 senα cosα) =
v20
gsen 2α.
Esta funcion toma un valor maximo para α = 45o. Tengase en cuenta que en
estos razonamientos no se ha tenido en cuenta la curvatura de la Tierra por lo
que solo son validos para alcances no demasiado grandes.
Ecuacion de la trayectoria, y = y(x).
Eliminando t entre las ecuaciones x = x(t) e y = y(t) se obtiene:
y(x) = x tanα− g
2v20 cos2 α
x2
que es la ecuacion de una parabola invertida, de ahı que este tipo de movimiento
reciba el nombre de parabolico.
2.4. Movimiento relativo
El concepto de movimiento siempre es un concepto relativo, pues debe referirse a un
sistema de referencia particular, escogido por el observador. Como diferentes observa-
dores pueden elegir distintos sistemas de referencia, es importante estudiar que relacion
hay entre las observaciones de uno y otro.

2.4. MOVIMIENTO RELATIVO 47
Por ejemplo, la mayor parte de las observaciones de nuestra vida cotidiana estan
referidas a la Tierra, es decir, a un sistema de referencia que se mueve con ella (de
forma muy compleja). Sin embargo, los astrofısicos prefieren considerar como sistema
de referencia, las denominadas estrellas fijas (estrellas tan lejanas que su movimiento
es inapreciable desde la Tierra) y en fısica atomica el movimiento de los electrones se
refiere al nucleo atomico. La posibilidad de elegir un sistema de referencia absoluto
preocupo durante mucho tiempo a fısicos y filosofos. Y de hecho durante algunos siglos
se supuso la existencia de un extrano sistema, llamado eter que era una sustancia que
llenaba el espacio vacıo y se podıa considerar como un sistema de referencia absoluto.
Hoy en dıa la busqueda de un sistema absoluto es innecesaria e irrelevante.
2.4.1. Velocidad relativa
Consideremos dos objetos puntuales A y B y un observador O que utiliza como
sistema de referencia unos ejes cartesianos. Las velocidades de A y B respecto a O
seran:
~vA =d~rAdt
; ~vB =d~rBdt
La velocidad relativa de B respecto de A sera, ~rAB = d~rAB/dt, y la de B respecto de
A: ~rBA = d~rBA/dt, donde ~rAB = ~rB − ~rA y ~rBA = ~rA − ~rB.
r A
z
x
y
A
B
r B
r AB
v A v B
O

48 CAPITULO 2. CINEMATICA DE UNA PARTICULA
Como ~rAB = −~rBA resulta que las velocidades relativas son vectores identicos pero
con sentidos opuestos: ~vAB = −~vBA.
~vAB =d~rABdt
=d~rBdt− d~rA
dt= ~vB − ~vA
~vBA = −~vAB = ~vA − ~vB
Luego la velocidad relativa es la diferencia vectorial de velocidades respecto al sistema
O. Veamos que sucede con las aceleraciones.
~aABd~vABdt
=d~vBdt− d~vA
dt=⇒ ~aAB = ~aB − ~aA, ~aBA = ~aA − ~aB
2.4.2. Movimiento relativo de traslacion uniforme
Consideremos dos observadores, O y O′, que se mueven uno respecto del otro para-
lelamente, con velocidad constante y sin rotaciones relativas. El observador O percibe
al O′ moviendose con velocidad ~v y el O′ al O con velocidad −~v. Compararemos las
descripciones del movimiento de un objeto para los dos observadores. Por ejemplo,
vamos a comparar la descripcion que hace un observador situado en un anden de una
estacion de trenes (O) de un avion (A) y la que realiza otro observador sobre un tren
(O′) que se mueve con velocidad constante paralelamente al primero.
r
z
x, x'
y
z'
r'
v
O O'
A
y'
vt

2.4. MOVIMIENTO RELATIVO 49
Por simplicidad elegiremos los ejes, x y x′, en la direccion del movimiento relativo
y supondremos que en t = 0, O y O′ coinciden. Con estas condiciones se verificara:
~v = v~i−−→OO′ = ~v t
~r =−−→OO′ + ~r′ → ~r′ = ~r − ~v t.
En componentes: x′ = x− vty′ = y
z′ = z
t′ = t
Esta transformacion de coordenadas se denomina transformacion galileana. Veamos
cuales son las velocidades del objeto A para los dos observadores. Sea ~u la velocidad
de A respecto a O y ~u′ la velocidad de A respecto a O′.
~u =d~r
dt
~u′ =d~r′
dt=d(~r − ~vt)
dt
Como ~r′ = ~r − ~vt y v = cte.
d~r′
dt=d~r
dt− ~v → ~u′ = ~u− ~v
En componentes: u′x = ux − v tu′y = uy
u′z = uz
Aceleraciones de A respecto a O y O′:
~a =d~u
dt; ~a′ =
d~u′
dt
d~u′
dt=d~u
dt−�����0
d~v
dt=⇒ ~a′ = ~a
Ambos observadores miden la misma aceleracion. Luego la aceleracion es una magnitud
fısica invariante bajo una transformacion galileana.
En resumen, en una transformacion galileana: ~r′ = ~r − ~vt, ~u′ = ~u− ~vt y ~a′ = ~a.

50 CAPITULO 2. CINEMATICA DE UNA PARTICULA
2.4.3. Movimiento relativo de rotacion uniforme
Consideremos ahora dos observadores O y O′ que rotan uno respecto del otro con
velocidad angular uniforme ω, de modo que el origen es el mismo para los dos. Sea O′
el observador que rota respecto a O.
y
y'
zz'
x
x'A
ij
k'k
j '
ω
r
r'
i'
Vector de posicion de la partıcula A respecto a O:
~r = x~i+ y~j + z~k
~v =
(dx
dt,dy
dt,dz
dt
).
Respecto a O′:
~r′ = ~r = x′~i′ + y′~j′ + z′~k′
~v′ =
(dx′
dt,dy′
dt,dz′
dt
).
Pero comoO′ esta rotando, paraO los vectores unitarios, ~i′, ~j′ y ~k′, cambian de direccion
y no son constantes. Desde O:
~v =d~r
dt=
d
dt
(x′~i′ + y′~j′ + z′~k′
)=
dx′
dt~i′ + x′
d~i′
dt+dy′
dt~j′ + y′
d~j′
dt+dz′
dt~k′ + z′
d~k′
dt(2.10)

2.4. MOVIMIENTO RELATIVO 51
d~i′/dt representa la velocidad de un punto que esta a la distancia unidad del ori-
gen (y lo mismo para los otros ejes) girando con velocidad constante respecto a O, y
recordemos que en un movimiento circular: ~v = ~ω × ~r. Entonces:
d~i′
dt= ~ω × ~i′; d~j′
dt= ~ω × ~j′; d~k′
dt= ~ω × ~k′
=⇒ x′d~i′
dt+ y′
d~j′
dt+ z′
d~k′
dt= x′(~ω × ~i′) + y′(~ω × ~j′) + x′(~ω × ~k′) =
= ~ω × (x′~i′ + y′~j′ + z′~k′) = ~ω × ~r′ = ~ω × ~r(2.11)
Poniendo (2.10) en terminos de ~v′ y (2.11):
~v = ~v′ + ~ω × ~r
Esta ecuacion relaciona las velocidades ~v y ~v′ de un objeto para dos observadores que
rotan entre sı con velocidad angular ~ω. Para obtener la relacion entre las aceleraciones
procederemos de forma similar.
Aceleracion de A medida por O respecto a xyz:
~a =d~v
dt=dvxdt~i+
dvydt~j +
dvzdt~k
Para O′:
~a′ =d~v′
dt=dv′xdt~i′ +
dv′ydt~j′ +
dv′zdt
~k′
Como ~v = ~v′ + ~ω × ~v:d~v
dt=d~v′
dt+ ~ω × d~r
dt
porque ω = cte. Calculemos cada uno de los sumandos que aparecen en esa ecuacion.
•d~v′
dt=dv′xdt~i′ +
dv′ydt~j′ +
dv′zdt
~k′︸ ︷︷ ︸~a′
+ v′xd~i′
dt+ v′y
d~j′
dt+ v′z
d~k′
dt︸ ︷︷ ︸~ω×~v′
=⇒ d~v′
dt= ~a′ + ~ω × ~v′

52 CAPITULO 2. CINEMATICA DE UNA PARTICULA
•~ω × d~r
dt= ~ω × (~v′ + ~ω × ~r) = ~ω × ~v′ + ~ω × (~ω × ~r)
En definitiva,
d~v
dt= ~a = (~a′ + ω × ~v′) + (~ω × ~v′ + ~ω × (~ω × ~r)) =
= ~a′ + 2~ω × ~v′ + ~ω × (~ω × ~r) (2.12)
Esta ecuacion relaciona las aceleraciones ~a y ~a′ de A registradas por dos observadores
O y O′ que rotan uno respecto del otro con velocidad ~ω. El termino 2~ω×~v′ se denomina
aceleracion de Coriolis y el termino ~ω×(~ω×~r) aceleracion centrıpeta. Profundizaremos
en el significado fısico de ambos sumandos estudiando el caso particular de la rotacion
de la Tierra.
En resumen, en una transformacion de rotacion constante: ~r′ = ~r, ~v′ = ~v − ~ω × ~r y
~a′ = ~a− 2~ω × ~v′ − ~ω × (~ω × ~r).
2.4.4. Movimiento relativo con respecto a la Tierra
La Tierra rota respecto a su eje con velocidad ω = 7,292 × 10−5 rad/s. Si en un
punto sobre la superficie la aceleracion de la gravedad es ~g0 (para un observador que
no gira) y esta dirigida hacia el centro de la Tierra, para un observador que gire con
la Tierra sera:
~g′ = ~g0 − 2~ω × ~v′ − ~ω × (~ω × ~r).
Caso a) Cuerpo en reposo o moviendose lentamente: 2~ω × ~v′ ' 0
=⇒ ~g′ ' ~g0 − ~ω × (~ω × ~r)
es decir, solo consideramos aceleracion centrıpeta. Esta aceleracion efectiva, ~g
es la que se medirıa, por ejemplo, con un pendulo en un laboratorio. El termino
centrıpeto es vectorialmente paralelo al ecuador y su modulo vale ω2R cosλ donde
λ es la latitud y R el radio de la Tierra (R ' 6,37×106m). Este termino disminuye
del ecuador hacia los polos, pero siempre es pequeno. Como maximo vale ' 0,3 %
de g0 cerca del ecuador. Provoca una pequena desviacion de la direccion radial
de g0 hacia el centro de la Tierra ası:

2.4. MOVIMIENTO RELATIVO 53
AA'
g'g
0
S N
Hemisferio Norte
A A'S N
Hemisferio Sur
g'g0
Caso b) Cuerpo que cae con velocidad apreciable.
En este caso ~v′ esta dirigida verticalmente hacia abajo y el termino de Coriolis
provoca una desviacion en la caıda en direccion Este u Oeste. Por ejemplo, si se
deja caer una partıcula desde una altura de 100 m en latitud 45o, la desviacion
que experimenta son 1,6 m.
v'
A A'W E
Hemisferio Norte
-2 w x v'
v'
AA'W E
Hemisferio Sur
-2 w x v'
Numericamente esta aceleracion solo es significativa para objetos que se mueven
a gran velocidad como misiles balısticos o satelites.
Caso c) Partıcula moviendose horizontalmente.
Este es el caso de las moleculas de aire moviendose rapidamente en direccion radial
a un centro de bajas presiones debido al gradiente de presiones. La aceleracion
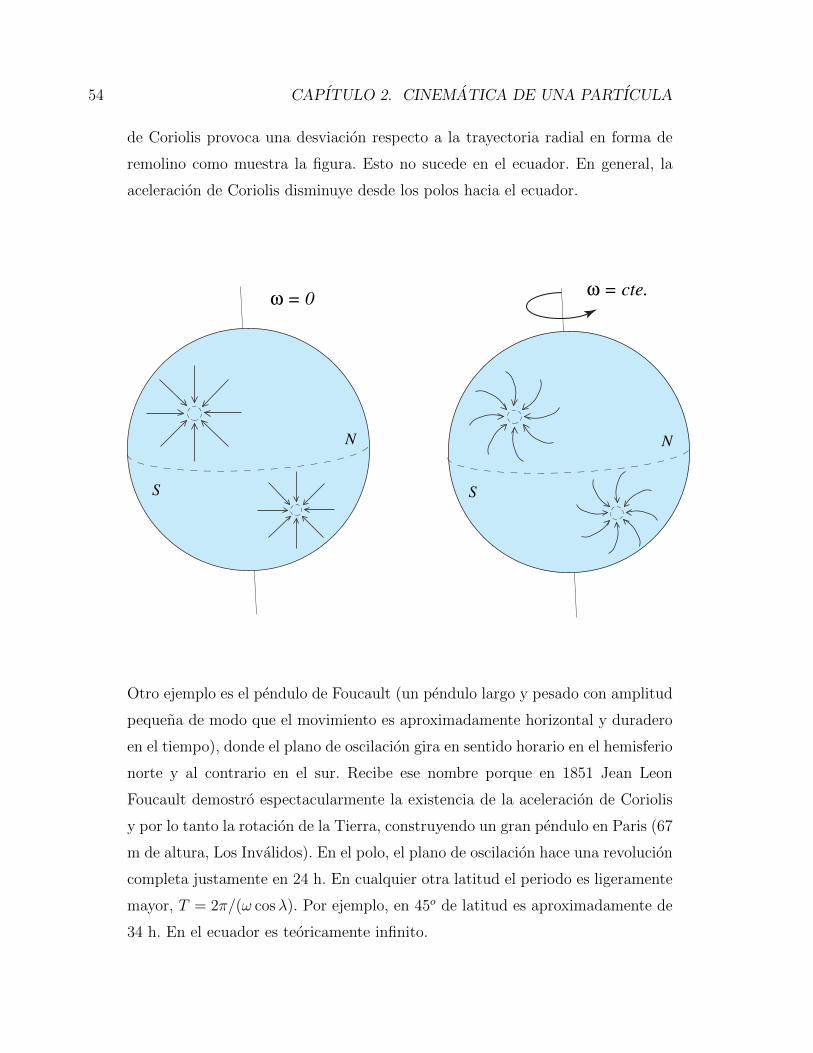
54 CAPITULO 2. CINEMATICA DE UNA PARTICULA
de Coriolis provoca una desviacion respecto a la trayectoria radial en forma de
remolino como muestra la figura. Esto no sucede en el ecuador. En general, la
aceleracion de Coriolis disminuye desde los polos hacia el ecuador.
ω = 0
N
S
ω = cte.
N
S
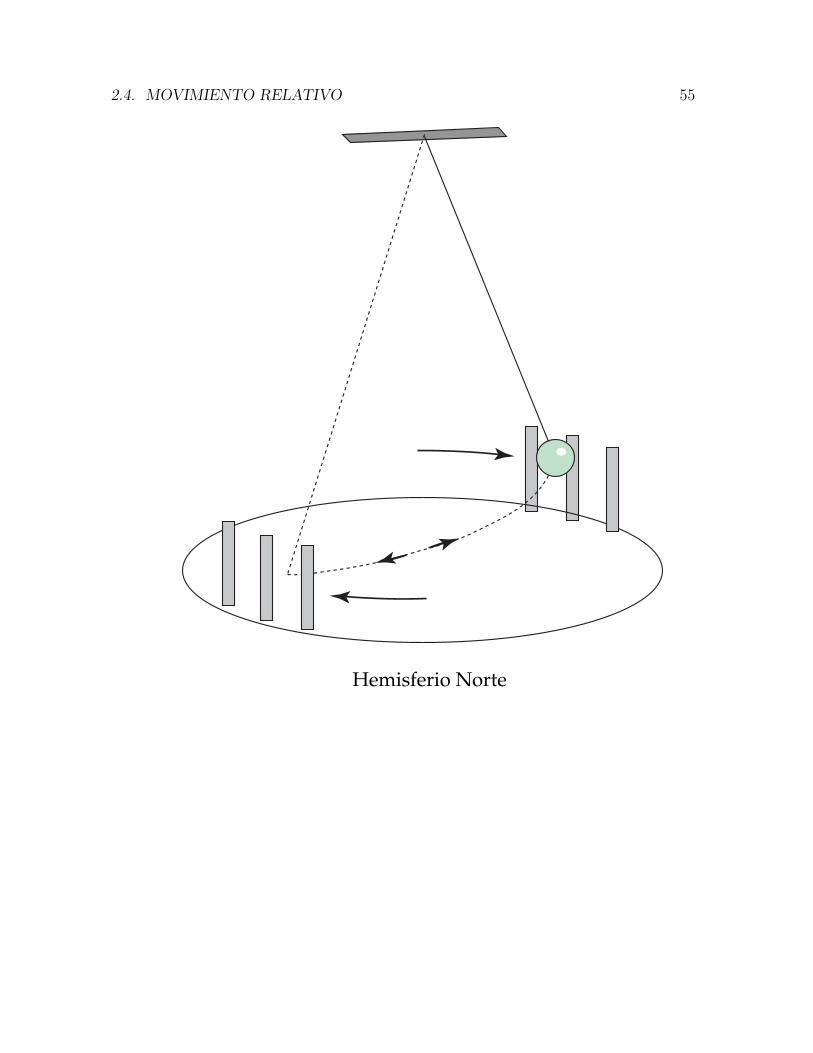
Otro ejemplo es el pendulo de Foucault (un pendulo largo y pesado con amplitud
pequena de modo que el movimiento es aproximadamente horizontal y duradero
en el tiempo), donde el plano de oscilacion gira en sentido horario en el hemisferio
norte y al contrario en el sur. Recibe ese nombre porque en 1851 Jean Leon
Foucault demostro espectacularmente la existencia de la aceleracion de Coriolis
y por lo tanto la rotacion de la Tierra, construyendo un gran pendulo en Paris (67
m de altura, Los Invalidos). En el polo, el plano de oscilacion hace una revolucion
completa justamente en 24 h. En cualquier otra latitud el periodo es ligeramente
mayor, T = 2π/(ω cosλ). Por ejemplo, en 45o de latitud es aproximadamente de
34 h. En el ecuador es teoricamente infinito.
2.4. MOVIMIENTO RELATIVO 55
Hemisferio Norte


2.5. PROBLEMAS 57
2.5. Problemas
1. La velocidad de una partıcula que se mueve en lınea recta viene dada por v =
4t2 − 6t+ 2 (S.I.). Sabiendo que en t = 0, x0 = 3 m, calcula:
a) Su posicion en cualquier instante.
b) Su aceleracion instantanea.
c) Su aceleracion media entre t1 = 1 s y t2 = 2 s.
(Respuestas : a) x(t) = 3 +4
3t3 − 3t2 + 2t; b) a(t) = 8t− 6; c) a = 6 m/s2)
2. La ecuacion de la aceleracion en funcion de la velocidad de una partıcula en una
trayectoria rectilınea es a = 3(1− v2)1/2. Sabiendo que el movil parte del reposo
y que el origen de espacios y tiempos coinciden, calcula las ecuaciones de este
movimiento.
(Respuestas : v(t) = sen(3t); a(t) = 3 cos(3t); x(t) =1
3[1− cos(3t)])
3. La variacion de la aceleracion de la gravedad con la altura viene dada por:
g = − GM0
(R0 + h)2
y cuando h = 0, g0 = 9,8 m/s2. Teniendo en cuenta esta expresion calcula la
velocidad inicial, v0, que habrıa que darle a un objeto para que lanzado desde la
superficie terrestre ascienda una altura vertical de 4000 km. (R0 = 6000 km).
(Respuestas : v0 = 6858 m/s)
4. La ecuacion que define la trayectoria de una partıcula en un plano XY viene
dada por ~r = 5t~i+ (10√
3t− 5t2)~j. Determınense:
a) La ecuacion de su trayectoria, y = f(x).
b) Los vectores velocidad y aceleracion.
c) Los modulos de la aceleracion tangencial y normal en t = 1 s.
(Respuestas : a) y(x) = 2√
3x− 1
5x2. b) ~v = 5~i+ 10(
√3− t)~j; ~a = −10~j.
c) at = 8,2 m/s2; an = 5,7 m/s2)

58 CAPITULO 2. CINEMATICA DE UNA PARTICULA
5. El vector aceleracion de una partıcula en movimiento viene expresado en el S.I.
por ~a = 6t~i − 2~k. Inicialmente la partıcula se encuentra en P0 : (1, 3,−2) y
transcurridos 3 s su velocidad es ~v = 3~i + 2~j − 6~k. Calculense su posicion y su
velocidad en cualquier instante.
(Respuestas : a) ~v(t) = (3t2−24, 2,−2t). ~r(t) = (1 + t3−24t, 3 + 2t,−2− t2))
6. Calcula la velocidad lineal y la aceleracion normal de un punto sobre la Tierra
situado a 60◦
de latitud. (Radio de la Tierra: 6300 km).
(Respuestas : v = 827,8 km/h; an = 217,5 km/h2)
7. Se dispara un canon con una inclinacion de 45◦
respecto a la horizontal, siendo
la velocidad inicial del proyectil 490 m/s. Calculense:
a) El alcance, la altura maxima y los tiempos correspondientes.
b) La posicion del proyectil y su velocidad al cabo de 2 s.
(Respuestas : a) tmax = 35,3 s; ymax = 6125 m; tv = 70,6 s; R = 24500 m;
b) ~r(t = 2 s) = 693,0~i+ 673,4~j m; ~v(t = 2 s) = 346,5~i+ 326,9~j m/s)
8. Una pelota rueda por un tejado que forma un angulo de 30◦
con la horizontal y
al llegar a su extremo tiene una velocidad de 10 m/s. La altura del edificio es de
60 m y la anchura de la calle a la que vierte el tejado es de 30 m. Calcula:
a) Las ecuaciones de movimiento de la pelota y la ecuacion de su trayectoria.
b) ¿Llegara directamente al suelo o chocara antes con la pared opuesta?
c) Tiempo que tarda en llegar al suelo y velocidad en ese momento.
d) Posicion en que se encuentra cuando su velocidad forma un angulo de 45◦
con
la horizontal.
(Respuestas : a) ~a(t) = −9,8~j (S.I.); ~v(t) = (v0 cosα,−v0 senα− gt); ~r(t) =
(v0t cosα, y0−v0t senα− 1
2gt2); b) No choca con la pared; c) t = 3 s; v = 35,5
m/s; d) ~r = 3,5~i+ 2,8~j (S.I.).)

2.5. PROBLEMAS 59
9. Un plano inclinado forma un angulo β con la horizontal. Se dispara un proyec-
til desde su punto mas bajo con velocidad v0 y formando un angulo α con la
horizontal. Calcula el alcance sobre el plano inclinado y su valor maximo.
(Respuestas : R =v2
0
g cos2 β[sen(2α− β)− sen β]; αmax =
1
2
(π2
+ β)
; Rmax =
v20
g(1 + sen β))
10. Un rıo fluye en direccion oeste-este con una velocidad de 3 m/s. Si un nadador
nada hacia el Norte con una velocidad de 2 m/s respecto al agua, ¿cual es la
velocidad del nadador respecto a la orilla?
(Respuestas : vno = 3,6 m/s; tan θ = 33,7◦)
11. Una barca que se dirige hacia el norte cruza un rıo muy ancho con una velocidad
de 10 km/h con respecto al agua. La velocidad del agua del rıo es de 5 km/h
hacia el este.
a) Determina la velocidad del bote respecto a un observador estacionario en tierra.
b) Si el bote desease ir directamente hacia el norte (con la misma velocidad), ¿en
que direccion debe dirigirse?
(Respuestas : a) vbt = 11,2 km/h; θ = 26,6◦; b) θ′ = 30,0
◦)
12. Un dispositivo esta situado en el centro de un vagon que se mueve con velocidad
~vv. En un cierto instante lanza simultaneamente dos pelotas con velocidad v, una
en el sentido de la marcha y otra en el opuesto. ¿Chocan las dos pelotas con
las paredes del vagon al mismo tiempo? ¿Que sucederıa si el vagon estuviese en
reposo?
(Respuestas : t1 = t2. En reposo sucederıa lo mismo.)
13. Un avion militar vuela horizontalmente a una velocidad de 360 km/h y a una
altura de 1000 m.
a) Si quiere lanzar una bomba sobre un objetivo estatico en tierra, ¿a que distancia
horizontal de este debe hacerlo?

60 CAPITULO 2. CINEMATICA DE UNA PARTICULA
b) Si el objetivo es un camion que circula a 72 km/h en la misma trayectoria
rectilınea que el bombardero, ¿a que distancia debe lanzar la bomba, tanto si el
camion se acerca como si se aleja?
(Respuestas : a) x = 1429 m; b) x = 1714 si se acerca y x = 1143 si se aleja.)
14. Un avion tarda 60 min en ir de Valencia a Palma, que estan a una distancia de
300 km, mientras que para volver solo tarda 50 min. En toda la travesıa sopla
un viento constante cuya direccion forma un angulo de 60◦
con la trayectoria.
Determina: la velocidad del avion respecto del viento (supuesta en modulo igual
en los dos caminos) y la velocidad del viento.
(Respuestas : Velocidad del viento: −
(1
2,
√3
2
)km/min; Velocidad del avion
respecto al viento en la ida:
(11
2,
√3
2
)km/min; Velocidad del avion respecto
al viento en la vuelta:
(−11
2,
√3
2
)km/min.)
15. Sabiendo que el periodo de rotacion de la Tierra alrededor de su eje es de 24
horas, encontrar la velocidad y aceleracion de un punto sobre su superficie en
funcion de la latitud. ¿Cual deberıa ser la velocidad de rotacion de la Tierra para
que en el ecuador no se experimentase aceleracion de la gravedad? (radio de la
Tierra: R = 6,38× 106 m).
(Respuestas : ω0 ' 17ω.)
16. Un dispositivo situado en el centro de una plataforma que gira con velocidad
angular ω lanza un proyectil con velocidad horizontal v0. ¿Cual es la trayectoria
del proyectil en un sistema de referencia ligado a la plataforma? (Desprecia el
efecto de la gravedad).
(Respuestas : x′2 + y′2 = v2xt
2)
17. Una partıcula se mueve en el espacio con una velocidad ~v = (3t − 2)~i + (6t2 −5)~j + (4t − 1)~k y el vector posicion en el instante inicial es ~r0 = 3~i − 2~j + ~k.
Calcula:

2.5. PROBLEMAS 61
a) El vector posicion en cualquier instante.
b) El vector aceleracion.
c) Las aceleraciones normal y tangencial en t = 1 s.
(Respuestas : a) ~r(t) =
(3
2t2 − 2t+ 3, 2t3 − 5t− 2, 2t2 − t+ 1
); b) ~a = (3, 12t, 4);
c) at(t = 1) =27√11
; an(t = 1) = 10,1 (S.I.).)
18. Un cuerpo inicialmente en reposo se mueve en una trayectoria rectilınea con una
aceleracion a = me−nt, donde m y n con constantes. Calcula la velocidad maxima
que puede alcanzar el cuerpo y el espacio recorrido en un tiempo t.
(Respuestas : vmax =m
n; x(t) =
m
n
(t+
1
ne−nt
)− m
n2)
19. Un bloque de madera esta unido por una varilla de longitud constante `, a un
punto de una rueda de radio a, que gira con velocidad angular constante ω.
Calcula la velocidad con que se desplaza el bloque a lo largo de la lınea que une
el centro del bloque con el centro de la rueda.
(Respuestas :dx
dt= −aω senωt
[a cosωt
(`2 − a2 sen2 ωt)1/2
]− 1
)20. a) Un disco gira a 33,3 rev/min. ¿Cual es su velocidad angular?
b) Un disco gira con aceleracion angular constante α = 2 rad/s2. Si parte del
reposo, ¿Cuantas revoluciones dara en los 10 primeros segundos?
c) ¿Cual es la velocidad angular del disco del apartado anterior al cabo de 10 s?
(Respuestas : a) ω = 3,5 rad/s; b) θ = 15,9 rev; c) ω = 20 rad/s. )
21. El vector de posicion de una partıcula que se mueve en una trayectoria plana es
~r = [5 cos(πt)− 1]~i+ (5 sen(πt) + 2]~j (S.I.).
a) Demuestrese que el movimiento es circular y uniforme.
b) Calcula el radio de la trayectoria.
c) Calcula la frecuencia del movimiento.

62 CAPITULO 2. CINEMATICA DE UNA PARTICULA
(Respuestas : a) v =cte. y an =cte. luego el moviemiento es circular y uniforme;
b) R = 5 m; c) ν = 0,5 s−1.)
22. Un policıa persigue a un ladron de joyas a traves de los tejados de la ciudad.
Ambos corren a una velocidad de 5 m/s, cuando llegan a un espacio vacıo entre
dos tejados que tiene 4 m de altura y desnivel de 3 m. El ladron salta con una
inclinacion de 45◦
y el policıa horizontalmente. ¿Conseguira el ladron escapar del
policıa?
(Respuestas : x = 4,3 m > 4 m, luego el ladron consigue escapar.)
23. Una partıcula parte del origen de coordenadas y recorre la parabola 2y = x2,
siendo la proyeccion del movimiento sobre el eje x de velocidad constante v0 = 2
m/s. Calcula:
a) La velocidad.
b) La aceleracion.
c) El modulo de las componentes intrınsecas de la aceleracion.
d) El radio de curvatura.
(Respuestas : a) v = 2(1 + 4t2)1/2; b) ~a = 4~j; c) at =8t
(1 + 4t2)1/2; an =
4
(1 + 4t2)1/2; d) ρ = (1 + 4t2)3/2.)
24. Una partıcula parte del reposo en la posicion A : (R, 0, h) y recorre con velocidad
ω constante la circunferencia de radio R y centro C : (0, 0, h) que esta contenida
en el plano z = h. Determınense:
a) La ecuacion vectorial de la trayectoria.
b) El vector velocidad lineal.
c) El vector aceleracion.
d) Las aceleraciones tangencial y normal.
(Respuestas : a) ~r = (R senωt)~i + (R cosωt)~j + h~k; b) ~v = (ωR cosωt)~i −(ωR senωt)~j; c) ~a = −(ω2R senωt)~i− (ω2R cosωt)~j; d) at = 0; ~an = ~a.)

2.5. PROBLEMAS 63
25. Admitiendo que el centro de la Tierra en su movimiento alrededor del Sol describe
una circunferencia de radio 150 MKm con velocidad constante en modulo, calcula:
el modulo de la velocidad.
(Respuestas : a) v = 1,07× 105 km/h.)
26. Tres pequenos caracoles estan situados en los tres vertices de un triangulo equilate-
ro de lado 60 cm. El primero se dirige hacia el segundo, este hacia el tercero y
este ultimo hacia el primero, todos con velocidad constante de 5 cm/min. Durante
su movimiento siempre estan orientados hacia el caracol diana. ¿Cuanto tiempo
tardan en encontrarse? ¿Que distancia recorren hasta hacerlo?
(Respuestas : t = 8 min; s = 40 cm.)
27. Las ecuaciones parametricas del movimiento de una partıcula son: x = 3 + 2t +
4t2; y = −1 + t + 2t2; z = 5 − 3t − 6t2 . Determinar: a) El tipo de movimiento
descrito por la partıcula. b) La ecuacion de la trayectoria. c) La velocidad media
en el intervalo de tiempo (1, 3). d) La ley horaria del movimiento, tomando como
origen su posicion en t = 0 s.
(Respuestas : a) Movimiento rectilıneo uniformemente acelerado; b)x− 3
2=
y + 1 =z − 5
−3; c) (18, 9,−27) m/s; d)
√14 (2t2 + t))
28. Un punto material se mueve en el plano XY con las siguientes velocidades y
aceleraciones: vy = 8t (m/s) ; ax = 4t (m/s2) con t en segundos. Cuando t = 0 s,
~r = (0, 2) m, vx = 0 m/s. Hallar: a) La ecuacion cartesiana de la trayectoria. b)
La rapidez de la partıcula cuando la coordenada x alcanza el valor de 18 m.
(Respuestas : a) y = 2 + 4
(3
2x
)2/3
; b) 30 m/s)
29. Una partıcula se mueve en el plano XY con las siguientes velocidades vx = 2/x
m/s , vy = 2t + 4 m/s, y para t = 0 s la posicion de la partıcula es (0, 1) m.
Calcular: a) La ecuacion de la trayectoria. b) La velocidad y aceleracion para t = 1
s. c) La pendiente de la trayectoria para t = 1 s. d) La aceleracion tangencial,
aceleracion normal y radio de curvatura para t = 1 s.

64 CAPITULO 2. CINEMATICA DE UNA PARTICULA
(Respuestas : a) y(x) = 1 + x2 +x4
16; b) ~v = (1, 6) m/s ; ~a =
(−1
2, 2
)m/s2; c)
k = 6; d) at = 1, 89 m/s2; an = 0, 822 m/s2; ρ = 45, 01 m)
30. Se lanza una partıcula de masa m con un angulo de 45◦
respecto de la horizontal,
desde un punto situado a una altura de 2 m sobre el suelo. La partıcula cae al
suelo a una distancia de 18 m. Teniendo en cuenta que la aceleracion debida al
viento es av =g
3(1, 1) (m/s2), siendo g la aceleracion de la gravedad. Calcular:
a) La velocidad inicial. b) La velocidad con la que la partıcula llega al suelo. c)
La altura maxima alcanzada por la partıcula.
(Respuestas : a) 7, 93 m/s; b) 14, 38 m/s ; α = −31, 87◦; c) 4, 41 m)
31. Un artillero dispara una pieza 10 s despues se ve en el cielo la nubecilla de la
explosion que se halla 30◦
sobre la horizontal y 2 s despues de verla, oye el
estampido que el proyectil produce al explosionar. Si la aceleracion del viento es
av = − gt10
(m/s2) en direccion horizontal y suponiendo la velocidad del sonido en
el aire 340 m/s, calcula la velocidad inicial del proyectil y el angulo de tiro.
(Respuestas : 112, 02 m/s; α = 47, 81◦)
32. La ecuacion del movimiento de una partıcula que se desplaza por una circunfe-
rencia viene dada por: s = 1 − t + 2t2 (S.I.). Calcular: a) La rapidez del movil
y su aceleracion tangencial, normal y total en el instante t = 2 s, sabiendo que
an = 0, 2 m/s2 para t = 1 s. b) La aceleracion angular y la velocidad angular
para t = 10 s.
(Respuestas : a) 7 m/s; at = 4 m/s2; an = 1, 09 m/s2; a = 4, 15 m/s2; b)
88, 89× 10−3 rad/s2; 0, 87 rad/s)
33. Una partıcula se mueve sobre un cırculo de radio r = 2 m segun la ley φ = 3t2−2t,
donde φ esta expresado en radianes y t en segundos. Calcular: el angulo descrito,
el arco recorrido, las velocidades lineal y angular, y las aceleraciones tangencial,
centrıpeta y angular a los 4 s de iniciado el movimiento.
(Respuestas : φ = 40 rad; s = 80 m; v = 44 m/s; ω = 22 rad/s; at = 12
m/s2; an = 968 m/s2; α = 6 rad/s2)
Capıtulo 3
Leyes de Newton y sus aplicaciones
3.1. Introduccion
La Dinamica estudia las relaciones entre los movimientos de los cuerpos y las causas
que los provocan, en concreto las fuerzas que actuan sobre ellos. Aquı estudiaremos la
Dinamica desde el punto de vista de la Mecanica Clasica, que es apropiada para el
estudio dinamico de sistemas grandes en comparacion con los atomos (∼ 10−10 m) y
que se mueven a velocidades mucho menores que las de la luz (∼ 3,0× 108 m/s).
Para entender estos fenomenos, el punto de partida es la observacion del mundo
cotidiano. Si se desea cambiar la posicion de un cuerpo en reposo es necesario empujarlo
o levantarlo, es decir, ejercer una accion sobre el. Aparte de estas intuiciones basicas, el
problema del movimiento es muy complejo. Todos los movimientos que se observan en
la Naturaleza (caıda de un objeto en el aire, movimiento de una bicicleta o un coche,
de un cohete espacial, etc) son realmente complicados.
Estas complicaciones motivaron que el conocimiento sobre estos hechos fuera erroneo
durante muchos siglos. Aristoteles penso que el movimiento de un cuerpo se detiene
cuando la fuerza que lo empuja deja de actuar. Posteriormente se descubrio que esto
no era cierto, pero el gran prestigio de Aristoteles como filosofo y cientıfico hizo que
estas ideas perduraran muchos siglos.
Un avance muy importante se debio a Galileo (1564-1642) quien introdujo el metodo
cientıfico, que ensena que no siempre se debe creer en las conclusiones intuitivas ba-
sadas en la observacion inmediata, pues esto lleva a menudo a equivocaciones. Galileo

66 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
realizo un gran numero de experiencias en las que se iban cambiando ligeramente las
condiciones del problema y midio los resultados en cada caso. De esta manera pudo
extrapolar sus observaciones hasta llegar a entender un experimento ideal. En concreto,
observo como un cuerpo que se mueve con velocidad constante sobre una superficie lisa
se movera eternamente si no hay rozamientos ni otras acciones externas sobre el.
Inmediatamente se presento otro problema: ¿si la velocidad no lo revela, que parame-
tro del movimiento indica la accion de fuerzas exteriores? Galileo respondio tambien a
esta pregunta, pero Newton (1642-1727) lo hizo de manera mas precisa: no es la velo-
cidad sino su variacion la consecuencia resultante de la accion de arrastrar o empujar
un objeto.
Esta relacion entre fuerza y cambio de velocidad (aceleracion) constituye la base
fundamental de la Mecanica Clasica. Fue Isaac Newton (hacia 1690) el primero en dar
una formulacion completa de las leyes de la Mecanica. Y ademas invento los proce-
dimientos matematicos necesarios para explicarlos y obtener informacion a partir de
ellos.
Antes de enunciarlas, introduciremos con precision los conceptos de masa y fuerza,
que son basicos en ellas:
Masa.
Es el parametro caracterıstico de cada objeto que mide su resistencia a cambiar
su velocidad. Es una magnitud escalar y aditiva.
Fuerza.
Todos tenemos un concepto intuitivo de que es una fuerza. Aunque dar una
definicion rigurosa y precisa no es sencillo, sı que tiene unas propiedades basicas
observables en la vida cotidiana:
1. Es una magnitud vectorial.
2. Las fuerzas tienen lugar en parejas.
3. Una fuerza actuando sobre un objeto hace que este o bien cambie su veloci-
dad o bien se deforme.

3.2. PRIMERA LEY DE NEWTON. SISTEMAS DE REFERENCIA INERCIALES67
4. Las fuerzas obedecen el Principio de superposicion: varias fuerzas concu-
rrentes en un punto dan como resultado otra fuerza que es la suma vectorial
de las anteriores.
Para medir fuerzas en los laboratorios se utilizan dinamometros. Un dinamometro
es un dispositivo formado por un muelle y un cilindro que sirve de carcasa. Un puntero o
aguja indica sobre una escala el grado de deformacion del muelle cuando sobre el actua
una fuerza. Generalmente la escala que se utiliza es de tipo lineal porque el muelle se
construye para que fuerza ejercida y deformacion sean directamente proporcionales.
Enunciado de las Leyes de Newton:
1. Primera ley (Principio de inercia): Todo cuerpo permanece en su estado inicial
de reposo o movimiento rectilıneo uniforme a menos que sobre el actue una fuerza
externa neta no nula.
2. Segunda ley : La aceleracion de un objeto es inversamente proporcional a su masa
y directamente proporcional a la fuerza neta que actua sobre el
~a =1
m~F o ~F = m~a,
donde ~F es la suma vectorial de todas las fuerzas que actuan sobre el (fuerza
neta).
3. Tercera ley (Principio de Accion-Reaccion) : Si un objeto A ejerce una fuerza
sobre un objeto B, este ejerce sobre el A una fuerza igual en modulo y direccion
pero de sentido contrario.
3.2. Primera Ley de Newton. Sistemas de referen-
cia inerciales
La primera Ley de Newton no distingue entre un cuerpo en reposo y otro en mo-
vimiento rectilıneo uniforme. Esto solo depende del sistema de referencia desde el que
se observa el objeto. Consideremos como ejemplo un vagon en el que se coloca una
mesa con un libro sobre su superficie, de manera que no existe friccion entre el libro

68 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
y la mesa. Si el vagon se mueve con velocidad uniforme ~v = ~cte. y sobre el libro no
actua fuerza alguna, seguira en reposo sobre la mesa, tanto para un observador sobre
la vagoneta (O) como para un observador sobre la vıa (O′).
y'
x'
y
x
v=cte.
y'
x'
y
x
a
Sistema de referencia no inercial
Sistema de referencia inercial
O‘
O
O‘
O
Sin embargo, supongamos que inicialmente el vagon esta en reposo y que en el
instante t = 0 comienza a avanzar con una cierta aceleracion, ~a. En este caso el libro

3.2. PRIMERA LEY DE NEWTON 69
permanecera en reposo respecto a la vıa, pero no respecto al vagon. ¡Y sobre el no
actua ninguna fuerza! Esto quiere decir que la primera ley de Newton no se verifica
en cualquier sistema de referencia. Se denominan sistemas de referencia inerciales a
aquellos en los que sı se verifica la ley de la inercia: Un sistema de referencia inercial es
aquel en que un cuerpo que no esta sometido a la accion de ninguna fuerza se mueve
con velocidad constante.
Cualquier sistema de referencia que se mueve con velocidad constante respecto a
otro sistema inercial es a su vez un sistema inercial. La Tierra no es un sistema inercial
perfecto puesto que tiene dos aceleraciones centrıpetas: una debida a su movimiento
de rotacion sobre su eje y otra debida al movimiento de traslacion alrededor del Sol.
Sus valores aproximados son estos:
- alrededor del Sol −→ 4,4× 10−3 m/s2
- rotacion −→ 3,4× 10−2 m/s2
Sin embargo, estas aceleraciones son muy pequenas y generalmente no se comete
demasiado error si se considera a la Tierra como un sistema de referencia inercial. A
menos que se especifique lo contrario los sistemas que consideraremos habitualmente
son inerciales. Los sistemas de referencia mas inerciales que existen son las denomi-
nadas estrellas fijas, que son estrellas tan alejadas de la Tierra que sus movimientos
resultan indetectables.
Como hemos visto, un objeto en reposo o movimiento rectilineo uniforme presenta
una cierta inercia o resistencia a cambiar su velocidad. Masa es precisamente la medida
de esta resistencia. Pero conviene senalar que esta masa no se corresponde con el
concepto de peso habitual. Es una masa inercial y se mide simplemente ejerciendo una
misma fuerza sobre dos objetos y comparando sus aceleraciones.
m1
m2
=a2
a1
.
Si una de estas masas es conocida, resulta sencillo determinar la otra a partir de esa
ecuacion. La masa es una propiedad intrınseca del cuerpo, independiente del medio
que lo rodea. Es una magnitud escalar y aditiva. Mas adelante volveremos sobre los
conceptos de peso y masa y masa inercial y masa gravitatoria.

70 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
3.3. Fuerza, masa y segunda Ley de Newton
La primera ley de Newton explica que le sucede a un objeto cuando la resultante
de todas las fuerzas externas sobre el es nula. La segunda explica lo que le sucede
cuando se ejerce una fuerza neta no nula sobre el. En realidad, estas dos leyes pueden
considerarse como una definicion de la fuerza. Una fuerza es la causa capaz de provocar
en un cuerpo un cambio de velocidad, es decir, una aceleracion. Ademas, la direccion
de la aceleracion coincide con la de la fuerza y el parametro que relaciona fuerza y
aceleracion es precisamente la masa del objeto, una propiedad intrınseca a el.
Sin embargo, la experiencia nos dice que algunas veces la fuerza se manifiesta de
forma ligeramente distinta. Cuando actua una fuerza sobre un cuerpo extenso este
puede acelerarse (y desplazarse) o simplemente deformarse. En realidad, lo que pasa
en este ultimo caso es que hay un desplazamiento relativo entre las partıculas que
forman el objeto y se modifica su geometrıa. Es decir, tienen lugar aceleraciones, pero
a nivel microscopico.
En realidad Newton no enuncio su segunda ley con la ecuacion:
~F = md~v
dt, (3.1)
sino que lo hizo de una forma mas general:
~F =d(m~v)
dt, (3.2)
donde m~v es lo que mas adelante definiremos como momento lineal o cantidad de
movimiento de la partıcula. Ambas ecuaciones coinciden si la masa de la partıcula es
constante, pero la segunda tambien es valida en el caso de que no lo sea. Imaginemos
por ejemplo el caso de una bola de nieve que rueda por una ladera nevada y su tamano
va aumentando. La forma correcta de relacionar la fuerza que actua sobre ella con la
aceleracion serıa la ecuacion (3.2), que es una generalizacion de la (3.1).
Unidades y dimensiones de la fuerza:
Unidades S.I.: newton=kg.m/s2.
Sistema cegesimal: dina=2.
Equivalencia: 1 N= 105 dinas.

3.4. LEY DE ACCION Y REACCION 71
dimensiones: [F ] = MLT−2.
3.4. Ley de accion y reaccion
Esta ley dice que si un cuerpo A ejerce una accion sobre otro B, este reacciona
sobre el primero con una reaccion igual y de sentido contrario. Ambas cosas ocurren
simultaneamente y siempre las dos fuerzas actuan sobre distintos objetos.
3.4.1 Ejemplo
Un balon en caıda libre.
La Tierra ejerce una fuerza gravitatoria sobre el objeto que cae, su peso. Pero
ademas el objeto ejerce una fuerza igual y opuesta en sentido sobre la Tierra pero
como la masa de la Tierra, MT , es mucho mayor que la del objeto, mo, su aceleracion
es despreciable frente a la de este.
F =MTm0
r2G
aT =
F
MT
ao =F
mo
Pero como MT >> mo =⇒ at << ao y lo que observamos realmente es que el
objeto cae hacia la Tierra y no al reves.
3.4.2 Ejemplo
Dos cargas electricas en el vacıo.
qq'
F F'

72 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
Segun la ley de Coulomb una carga ejerce sobre la otra una fuerza inversamente
proporcional al cuadrado de la distancia de separacion. La otra ejercera otra fuerza
identica, pero de sentido contrario.
| ~F |=| ~F ′ |= kqq′
d2; ~F = −~F ′.
3.4.3 Ejemplo
Un martillo golpeando un clavo sobre un trozo de madera.
El martillo ejerce fuerza sobre el clavo al golpearlo, ~Fm. Y el clavo tambien sobre el
martillo, ~Fc, pero como la masa del clavo es mucho mas pequena, el martillo consigue
que entre en la madera.
Fm
Fc
mm
mc
~ac =~Fmmc
= −~Fcmc
~am =~Fcmm
Pero como mm >> mc entonces ac >> am.
3.4.4 Ejemplo
Un cuerpo en reposo sobre una mesa.
Desde el punto de vista del cuerpo, las fuerzas que actuan sobre el son la gravitato-
ria, ~P , y la normal, ~N , que ejerce la mesa para sujetarlo.

3.5. LAS FUERZAS EN LA NATURALEZA 73
N
P
~N = −~P ; P = mg −→ N = mg
3.5. Las fuerzas en la Naturaleza
Hoy en dıa la Fısica reconoce cuatro tipos fundamentales de interaccion: gravitato-
ria, electromagnetica, fuerte y debil. Cualquier otra fuerza observable se puede explicar
en terminos de una o varias de estas. Por ejemplo, la friccion al mover un bloque sobre
una mesa se explica en terminos de la fuerza electromagnetica o la fuerza que ejerce
un amortiguador sobre la rueda de un coche.
• Interaccion gravitatoria.
Existe entre dos masas cualquiera, sean dos balones de futbol o dos plantas. Es la
mas debil de todas las interacciones y solo es numericamente relevante en el caso
de objetos de masas enormes. Disminuye con la distancia, pero tan lentamente que
se puede considerar que su alcance es infinito. Es la responsable de la estructura
del Universo a nivel de galaxias, estrellas y planetas.
• Interaccion electromagnetica.
Esta interaccion tiene dos vertientes, la electrica, que existe siempre entre dos
cargas cualquiera, y la magnetica, que es una interaccion entre cargas en movi-
miento. Su esencia es la misma y por eso se denomina electromagnetica. A nivel

74 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
macroscopico es la responsable de que un peine frotado atraiga unos trozos de
papel, del funcionamiento de una brujula o de que existan corrientes electricas.
A nivel microscopico es la responsable del movimiento de los electrones alrededor
del nucleo, de las interacciones entre dos atomos, de que existan gases, lıquidos y
solidos o de que un muelle se deforme. Es mucho mas intensa que la gravitatoria
y su alcance tambien es muy grande.
Por ejemplo, en un atomo de H2.
Interaccion p+ − e−: gravitatoria, 10−47 N; electromagnetica, 10−7 N.
• Fuerza nuclear fuerte.
Es la responsable de la estabilidad de los nucleos atomicos. Es la mas intensa
de las fuerzas conocidas, pero su alcance es extremadamente corto (10−14 m).
Por lo tanto solo es importante en los nucleos, donde protones y neutrones estan
confinados en un espacio de 10−15 m de diametro. Como los protones se repelen
entre sı electricamente, si no existe otra fuerza de cohesion mas intensa, no se
podrıan formar nucleos.
• Fuerza nuclear debil.
Es la responsable de ciertos tipos de desintegracion radiactiva (β). Existe en-
tre electrones y protones, es extremadamente debil y de corto alcance. En 1979
los fısicos predijeron teoricamente que la fuerza electromagnetica y la debil eran
manifestaciones diferentes de una unica fuerza. Esto fue confirmado experimen-
talmente en 1984. Se bautizo a esta interaccion con el nombre de electrodebil.
Camino hacia la unificacion de las fuerzas fundamentales de la Naturaleza.

3.6. CAMPOS Y FUERZAS DE CONTACTO 75
gravedad
celeste
gravedad
terrestre
(Newton)
gravitación
universal
(1686)
fuerza
eléctrica
fuerza
magnética
(Maxwell)
fuerza
electromagnética
fuerza
nuclear débil
(Weinberg
y Salam)
(1864)fuerza
electrodébil
(1979)
fuerza
nuclear fuerte
??
??
??
Intensidades relativas y alcances de las cuatro fuerzas fundamentales en la Natura-
leza.
Gravitatoria Electromagnetica Fuerte Debil
Alcance Infinito Infinito 10−15 m << 10−15 m
Int. Relativa 10−39 10−2 1 << 10−5
3.6. Campos y fuerzas de contacto
Las fuerzas fundamentales actuan entre partıculas separadas a una cierta distancia.
Esto se denomina accion a distancia. Este problema se considera en Fısica a traves del
concepto de campo: un objeto crea una perturbacion en el espacio que se propaga y
llega a actuar sobre otro objeto. El campo es un agente intermedio que en general se

76 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
propaga con una velocidad finita (para la interaccion electromagnetica esa velocidad
es la de la luz, c = 3 × 108 m/s). Pero generalmente la distancia sera muy pequena y
la interaccion parecera instantanea.
Sin embargo, la mayor parte de las fuerzas que observamos con nuestros sentidos
son fuerzas de contacto. Se deben al contacto entre varios objetos: muelles, fricciones,
tensiones, etc. Su origen microscopico son acciones a distancia, pero su manifestacion
macroscopica es de tipo contacto. Ademas, generalmente la fuerza microscopica sub-
yacente es electromagnetica: el rozamiento sobre una mesa se debe a interacciones
electromagneticas entre las moleculas del objeto y la mesa. Microscopicamente esas
interacciones son muy complejas, pero si las estudiamos desde un punto de vista ma-
croscopico no son tan complicadas.
3.7. Fuerza gravitatoria terrestre y peso
Una de las fuerzas mas comunes en nuestra vida cotidiana es la fuerza de atraccion
de la Tierra sobre un objeto. Esta fuerza se denomina peso del objeto. Si dejamos caer
un objeto proximo a la superficie terrestre y despreciamos la resistencia del aire (y la
variacion de la fuerza gravitatoria con la altura), el objeto experimenta una aceleracion
aproximada de 9,81 m/s2. Esta aceleracion es la misma para todos los objetos y solo
depende muy ligeramente de la altura y de la latitud en que se mide. Segun la segunda
ley de Newton:
~Fg = m~a −→ ~P = m~g
El vector ~g se denomina campo gravitatorio terrestre. La masa de un cuerpo en las
proximidades de la Tierra y de la Luna, por ejemplo, es muy similar, pero su peso
sera bastante distinto. Cerca de la Luna un cuerpo pesa aproximadamente 1/6 de lo
que pesa en la Tierra.
Un metodo alternativo al que ya hemos visto para determinar la masa de un cuerpo
(utilizando un dinamometro) es simplemente pesandolo. Una vez conocido el peso y g
con suficiente precision es facil determinar m.
La sensacion que tenemos de nuestro propio peso normalmente procede de las demas
fuerzas que lo equilibran. Si nos sentamos en una silla, el asiento ejerce una fuerza sobre

3.7. FUERZA GRAVITATORIA TERRESTRE Y PESO 77
nosotros que evita que nos caigamos. Cuando estamos de pie sobre una balanza, esta
ejerce una fuerza sobre nuestros pies. La balanza esta calibrada mediante un sistema
de muelles y registra la fuerza que ejerce sobre los pies. La fuerza que equilibra este
peso se denomina peso aparente. Si no existiese ninguna fuerza para equilibrar nuestro
peso, como ocurre en una caıda libre, el peso aparente serıa cero.
3.7.1 Ejemplo
Consideremos una persona en el interior de la cabina de un ascensor y de pie sobre una
bascula. Si el ascensor esta acelerado hacia arriba la balanza indica 733 N y cuando
esta parado marca 653 N. Determınense:
a) La masa de la persona.
b) La fuerza neta resultante sobre ella cuando el ascensor esta acelerado.
c) La aceleracion de la persona y del ascensor.
a) Consideremos como sistema de referencia inercial la superficie terrestre. Si ~Fa
es la fuerza que ejerce la balanza sobre la persona, antes de que comience a moverse el
ascensor no hay ninguna aceleracion y segun la segunda ley de Newton debe ser:
∑~F = m~a = 0
donde∑ ~F representa la fuerza neta total sobre la persona.
−→ Fa −mg = 0 −→ mg = 651N −→ m =Fag
= 66 kg
b) Ahora sobre la persona actuan dos fuerzas: la que ejerce la bascula sobre sus
pies, ~Fs (la que marca la propia balanza y opuesta en sentido al peso) y el peso, ~P . La
fuerza neta total sera:
∑~F = ~Fs − ~P = (Fs −mg)~j = 82 N~j
c) a =∑F/m = 1,2 m/s2.

78 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
3.8. Fuerzas de rozamiento
La experiencia nos confirma que en la realidad cotidiana es habitual que cuando un
objeto esta en movimiento es necesario ejercer sobre el una fuerza para que se mantenga
su estado de movimiento. Este hecho parece en principio contradecir el principio de
inercia. Ejemplos de esto son el deslizamiento de un bloque de madera sobre una
superficie no pulida, un automovil circulando sobre una carretera o una piedra lanzada
en el aire. Todas estos casos son diversas manifestaciones de fuerzas de friccion o
rozamiento.
En el ejemplo de un bloque de madera sobre una superficie rugosa, lo que sucede
es que si inicialmente esta en reposo y lo empujamos comienza a moverse, pero al cabo
de cierta distancia el bloque se para. Parece como si sobre el cuerpo actuase una fuerza
que se opone a su movimiento. La fuerza de friccion estatica es la que se opone al
movimiento del cuerpo cuando esta en reposo y ejercemos una fuerza pequena sobre
el. Hasta que ese empuje no es suficientemente intenso, el objeto permanece en reposo.
Cuando el cuerpo esta en movimiento existe otro tipo de friccion, denominado cinetica,
que hace que finalmente vuelva a pararse si sobre el no actua ninguna otra fuerza.
El origen de ambas fricciones es del mismo tipo. A nivel microscopico los atomos
y las moleculas de las dos superficies en contacto interaccionan (generalmente a traves
de fuerzas electromagneticas) de forma muy compleja. El efecto neto de esto a nivel
macroscopico son fuerzas que se oponen al movimiento del objeto.
3.8.1. Friccion estatica
En principio podrıa pensarse que esta fuerza deberıa ser proporcional a la superficie
de contacto entre los dos objetos. Pero los experimentos muestran que esto no es ası,
sino que esta fuerza solo depende de la fuerza normal ejercida por una superficie sobre
otra. En parte esto esta asociado al hecho de que la superficie macroscopica de contacto
no tiene que ver con el area microscopica en que interaccionan moleculas de ambos
objetos. El area de contacto microscopica puede ser 10−4 o 10−5 veces menor que la
macroscopica. Este hecho se refleja en la figura adjunta.
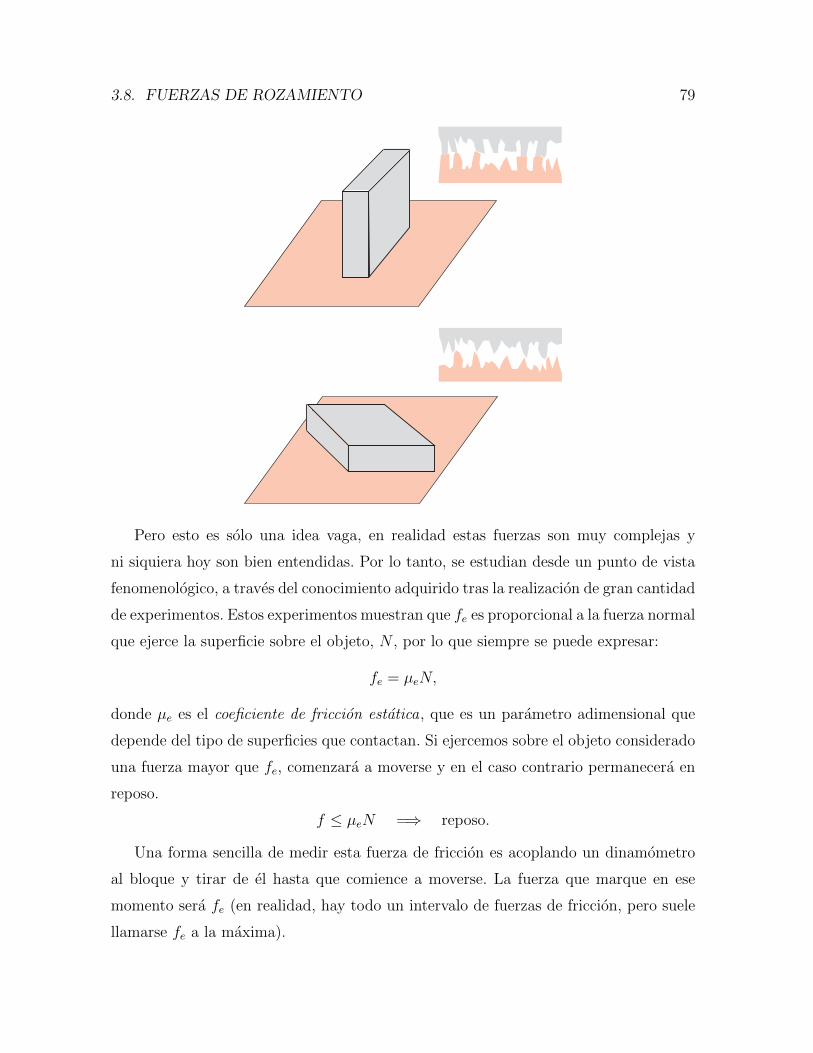
3.8. FUERZAS DE ROZAMIENTO 79
Pero esto es solo una idea vaga, en realidad estas fuerzas son muy complejas y
ni siquiera hoy son bien entendidas. Por lo tanto, se estudian desde un punto de vista
fenomenologico, a traves del conocimiento adquirido tras la realizacion de gran cantidad
de experimentos. Estos experimentos muestran que fe es proporcional a la fuerza normal
que ejerce la superficie sobre el objeto, N , por lo que siempre se puede expresar:
fe = µeN,
donde µe es el coeficiente de friccion estatica, que es un parametro adimensional que
depende del tipo de superficies que contactan. Si ejercemos sobre el objeto considerado
una fuerza mayor que fe, comenzara a moverse y en el caso contrario permanecera en
reposo.
f ≤ µeN =⇒ reposo.
Una forma sencilla de medir esta fuerza de friccion es acoplando un dinamometro
al bloque y tirar de el hasta que comience a moverse. La fuerza que marque en ese
momento sera fe (en realidad, hay todo un intervalo de fuerzas de friccion, pero suele
llamarse fe a la maxima).

80 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
N
P
f
3.8.2. Friccion cinetica
Al igual que en el caso de la friccion estatica, la friccion cinetica, suele estudiarse
desde un punto de vista fenomenologico, pues su origen a nivel elemental es muy
complejo. Se define el coeficiente de friccion cinetica como aquel que verifica:
fc = µcN,
donde fc es la fuerza de friccion cinetica. Como esta fuerza se opone al movimiento del
bloque, vectorialmente se puede expresar ası:
~fc = −µcN~u,
donde ~u es ~v/v. Experimentalmente se comprueba que:
a) µc < µe y ambos dependen del tipo y estado de las dos superficies. La diferencia
entre uno y el otro suele estar entre el 10 % y el 20 %.
b) µc (o fc) depende de la velocidad relativa entre las dos superficies, pero para velo-
cidades normales (desde cm/s hasta varios m/s se puede considerar independiente
de v.
c) µc es independiente del area macroscopica de contacto entre las dos superficies
(igual que µe).
La fuerza de friccion cinetica se puede interpretar como la fuerza necesaria para que
el movimiento relativo de dos cuerpos que se deslizan entre sı, sea uniforme. Esto se
debe a que la ecuacion de movimiento de un objeto sometido a una fuerza, ~f , de traccion
y otra, ~fc, de friccion cinetica es: m~a = ~f − µcN~u. Si a = 0 resulta: ~f = µcN~u = ~fc.

3.8. FUERZAS DE ROZAMIENTO 81
En el siguiente grafico se representa la fuerza de friccion, ff , que actua sobre un
bloque sobre una superficie no lisa en terminos de la fuerza aplicada, fap.
(a)
(b)
(c)
45o
f =
ff
ap
ff
ef
cf
apf
a) La fuerza de friccion en esta region existe, pero el objeto no se mueve porque la
fuerza aplicada es inferior a su valor maximo.
b) La fuerza aplicada vence la maxima fuerza de friccion, fap = fe, el objeto, co-
menzara a moverse.
c) La fuerza aplicada debe vencer la friccion cinetica, que es menor que la estatica.
Un metodo sencillo para calcular tanto fe como fc consiste en disponer una masa
conocida sobre un plano inclinado no liso, de forma que el angulo que forma con la
horizontal se pueda variar. Veremos como cambiando el angulo hasta que el objeto
comience a descender, obtenemos µe.
m
θ
N
P
θ
fe
x
y

82 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
Sea θc el angulo crıtico para el que comienza a deslizarse la masa:
θ < θc −→
{∑fy = N −mg cos θ = 0∑fx = mg sen θ − fe = 0
Resolviendo:
mg =N
cos θ−→ fe = N tan θ.
En el angulo crıtico la fuerza de rozamiento es maxima y podemos escribir: fe = µeN .
Sustituyendo:
fe = µeN = N tan θc −→ µe = tan θc.
Es decir, que µe es precisamente la tangente del angulo cuando el bloque comienza a
caer.
Cuando el bloque esta deslizandose, la ecuacion para∑fx tiene una componente
asociada a la aceleracion en la caıda, ax, y ademas ahora el rozamiento es cinetico.
∑fx = mg sen θ − µcN = max.
Como N = mg cos θ:
��mg sen θ − µc��mg cos θ =��max
=⇒ ax = g (sen θ − µc cos θ)
Y despejando µc:
~µc = −(axg− sen θ
)1
cos θ= tan θ − ax
g cos θ
Midiendo la aceleracion de la caıda, ax, se puede entonces obtener µc.
Valores aproximados de coeficientes de friccion habituales:

3.8. FUERZAS DE ROZAMIENTO 83
Materiales µe µc
acero sobre acero 0,7 0,6
vidrio sobre vidrio 0,9 0,4
teflon sobre teflon 0,04 0,04
caucho sobre hormigon (seco) 1,0 0,8
caucho sobre hormigon (mojado) 0,3 0,25
esquı sobre nieve 0,1 0,05
hielo sobre hielo 0,1 0,03
articulaciones humanas 0,01 0,003
3.8.3. Friccion por rodadura
N N
P
fe
Cuando un coche acelera a lo largo de una carretera horizontal, la fuerza no equi-
librada que causa la aceleracion es debida al rozamiento entre los neumaticos y la
carretera. Las fuerzas que actuan sobre el coche en el momento en que parte del reposo
son las que se observan en la figura.

84 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
El peso del coche es equilibrado por la normal ejercida por la superficie. Si no
hubiera rozamiento de los neumaticos sobre la carretera, el par que ejerce el motor
sobre ellos provocarıa que girasen sobre sı mismos y el coche no avanzarıa. Si hay
friccion pero el par ejercido por el motor es insuficiente, los neumaticos no se moveran
debido al rozamiento estatico con la carretera. La fuerza de friccion ejercida por la
carretera tiene direccion hacia adelante y causa la aceleracion que mueve el coche. Si
cada neumatico rueda sin deslizamiento, esta en reposo respecto a la carretera, por lo
tanto es una friccion estatica. Aunque la superficie del neumatico se mueve hacia atras
con velocidad v respecto al eje, este se desplaza hacia adelante con la misma velocidad.
Si el par del motor es demasiado grande, las ruedas giran sobre sı mismas y ahora
hay velocidad relativa entre rueda y carretera, por lo que el rozamiento sera cinetico.
Esto sucede cuando el coche patina sobre hielo o nieve. Como esta friccion es menor,
el coche no avanza.
Cuando el coche frena:
Frenazo brusco: las ruedas deslizan y el rozamiento es cinetico.
Frenazo suave: friccion estatica.
Cuando un neumatico rueda con velocidad constante no hay friccion ni estatica ni
cinetica, pero, sin embargo, se observa que es necesaria una pequena fuerza para que
siga moviendose igual. Existe una pequena friccion asociada al desgaste de rueda y
pavimento y a la deformacion de la rueda. Se define por esto un coeficiente de friccion
por rodadura como el cociente entre esta friccion y la normal ejercida por la carretera:
fr = µrN.
Valores tıpicos de µr: caucho sobre hormigon, 0,01 − 0,02; acero sobre acero, 0,001 −0,002.
3.8.4. Fuerzas de arrastre en fluidos
Cuando un objeto se mueve a traves de un fluido como el aire o el agua, sufre
una fuerza de resistencia o arrastre que se opone a su movimiento. Estas fuerzas son

3.8. FUERZAS DE ROZAMIENTO 85
manifestaciones macroscopicas de las interacciones de las moleculas del cuerpo con las
del medio que lo rodea.
La fuerza de arrastre depende de:
� la forma y el tamano del objeto
� las propiedades del fluido
� la velocidad del objeto respecto al fluido
Al igual que las fuerzas de friccion, las de arrastre se estudian desde un punto de
vista fenomenologico, a causa de su complejidad. Pero al contrario que aquellas, las de
arrastre aumentan con la velocidad.
~fa = −bvn~u,
donde ~u = ~v/v y n = 1 para velocidades bajas y n = 2 para velocidades altas. b es
un coeficiente que depende de la forma y tamano del objeto y de las propiedades del
fluido, como su viscosidad , η. Por ejemplo, para una esfera de radio R en un fluido de
viscosidad η, b = 6πRη, que se denomina ley de Stokes.
3.8.1 Ejemplo
Consideremos como ejemplo particular un cuerpo cayendo por la accion de la gravedad
en un fluido como el aire. La fuerza neta sobre el objeto serıa:∑fy = −mg + bvn = −ma,
y en forma de ecuacion diferencial:
mdv
dt= mg − bvn.
En el caso n = 1 la solucion de esta ecuacion es:
v(t) = −mgb
(1− e−bt/m
)
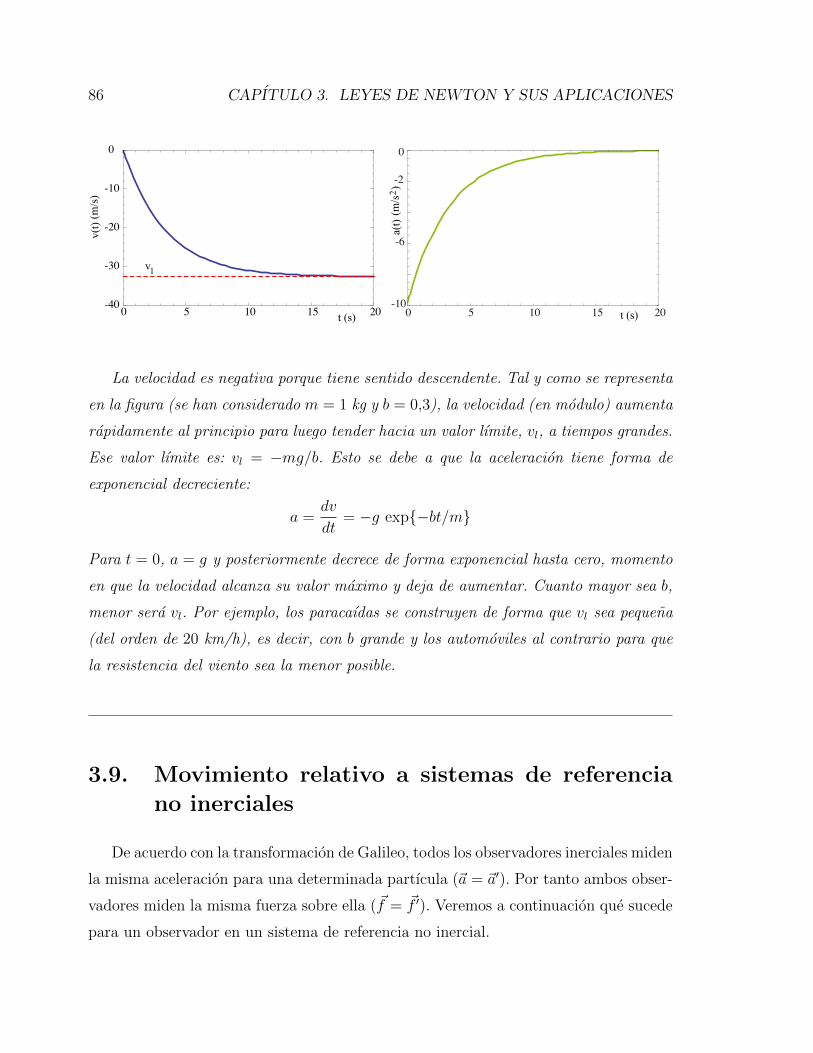
86 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
0 5 10 15 20-40
-30
-20
-10
0
v(t)
(m/s
)
t (s)
vl
t (s)
a(t)
(m/s
)2
0 5 10 15 20-10
-6
-2
0
La velocidad es negativa porque tiene sentido descendente. Tal y como se representa
en la figura (se han considerado m = 1 kg y b = 0,3), la velocidad (en modulo) aumenta
rapidamente al principio para luego tender hacia un valor lımite, vl, a tiempos grandes.
Ese valor lımite es: vl = −mg/b. Esto se debe a que la aceleracion tiene forma de
exponencial decreciente:
a =dv
dt= −g exp{−bt/m}
Para t = 0, a = g y posteriormente decrece de forma exponencial hasta cero, momento
en que la velocidad alcanza su valor maximo y deja de aumentar. Cuanto mayor sea b,
menor sera vl. Por ejemplo, los paracaıdas se construyen de forma que vl sea pequena
(del orden de 20 km/h), es decir, con b grande y los automoviles al contrario para que
la resistencia del viento sea la menor posible.
3.9. Movimiento relativo a sistemas de referencia
no inerciales
De acuerdo con la transformacion de Galileo, todos los observadores inerciales miden
la misma aceleracion para una determinada partıcula (~a = ~a′). Por tanto ambos obser-
vadores miden la misma fuerza sobre ella (~f = ~f ′). Veremos a continuacion que sucede
para un observador en un sistema de referencia no inercial.
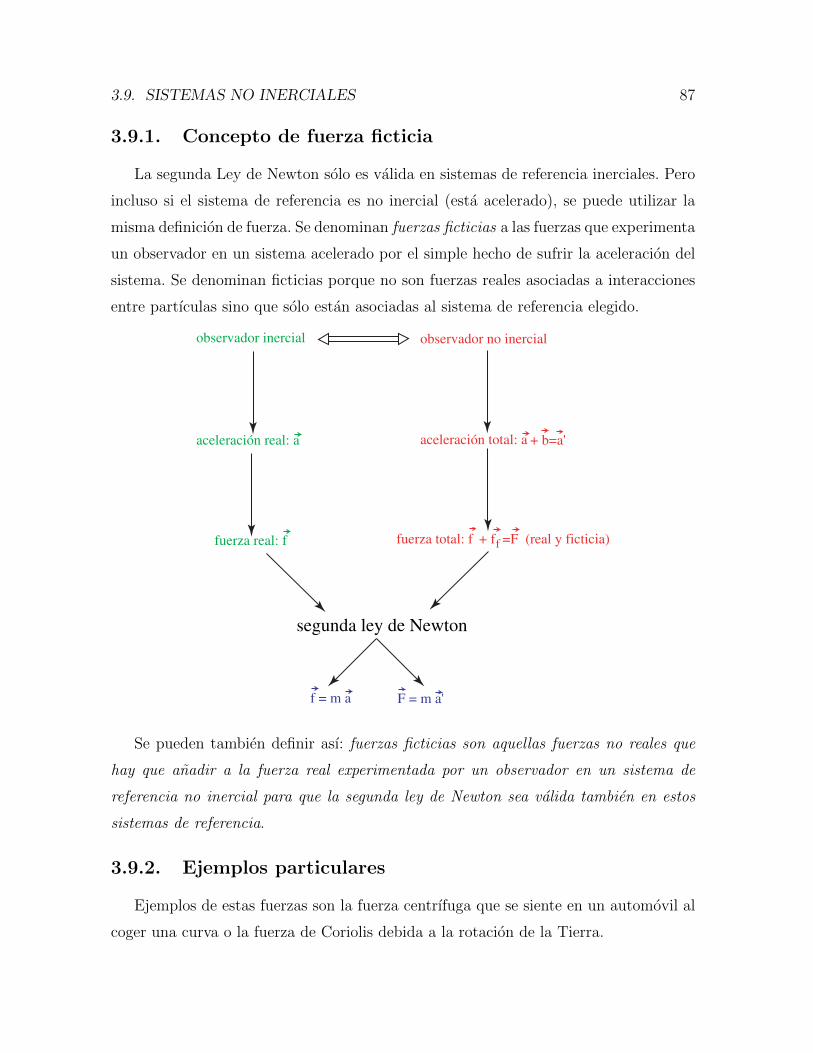
3.9. SISTEMAS NO INERCIALES 87
3.9.1. Concepto de fuerza ficticia
La segunda Ley de Newton solo es valida en sistemas de referencia inerciales. Pero
incluso si el sistema de referencia es no inercial (esta acelerado), se puede utilizar la
misma definicion de fuerza. Se denominan fuerzas ficticias a las fuerzas que experimenta
un observador en un sistema acelerado por el simple hecho de sufrir la aceleracion del
sistema. Se denominan ficticias porque no son fuerzas reales asociadas a interacciones
entre partıculas sino que solo estan asociadas al sistema de referencia elegido.
observador inercial observador no inercial
aceleración real: a
fuerza real: f
aceleración total: a + b=a'
fuerza total: f + f =F (real y ficticia)f
segunda ley de Newton
f = m a F = m a'
Se pueden tambien definir ası: fuerzas ficticias son aquellas fuerzas no reales que
hay que anadir a la fuerza real experimentada por un observador en un sistema de
referencia no inercial para que la segunda ley de Newton sea valida tambien en estos
sistemas de referencia.
3.9.2. Ejemplos particulares
Ejemplos de estas fuerzas son la fuerza centrıfuga que se siente en un automovil al
coger una curva o la fuerza de Coriolis debida a la rotacion de la Tierra.

88 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
En particular, un sistema de referencia en rotacion es un sistema no inercial. En la
transformacion de un sistema de referencia en reposo a otro que gira con ω constante,
demostramos en el tema de cinematica que:
~a︸︷︷︸sist. fijo
= ~a′︸︷︷︸sist. que gira
+ 2~ω × ~v′︸ ︷︷ ︸Coriolis
+ ~ω × (~ω × ~r)︸ ︷︷ ︸centrıpeta
.
Por lo tanto, las fuerzas asociadas ~f y ~f ′ difieren en esos terminos. La fuerza centrıfuga
es la fuerza ficticia asociada al termino ~ω × (~ω × ~r), es decir, a la aceleracion normal
o centrıpeta. Existe incluso en el caso de sistemas que giran con velocidad uniforme.
Para entender su significado fısico veamos el siguiente ejemplo.
3.9.1 Ejemplo
Considerese una plataforma girando con velocidad constante, ω, en la que un objeto
esta atado al eje de giro mediante una cuerda. Y supongamos dos observadores, uno
inercial externo a la plataforma y otro no inercial situado sobre ella.
w
T
T=m a
observador inercial
wT
observador no inercial
T - f =0c
fc
ã Observador inercial.
Desde su punto de vista el bloque se mueve en cırculo con velocidad v y esta ace-
lerado hacia el centro de la plataforma con una aceleracion centrıpeta a = v2/r.
Esta aceleracion es consecuencia de la fuerza no equilibrada ejercida por la ten-
sion de la cuerda.
3.9. SISTEMAS NO INERCIALES 89
ã Observador no inercial.
Para el observador que gira con la plataforma el objeto esta en reposo, ~a = 0.
Es decir observa una fuerza ficticia que contrarresta la tension para que no haya
aceleracion centrıpeta. Esa fuerza debe ser, fc = mv2/r. Este observador siente
la fuerza como si fuera perfectamente real, aunque solo sea la consecuencia de la
aceleracion del sistema de referencia en que se encuentra.


3.10. PROBLEMAS 91
3.10. Problemas
1. Se coloca un bloque de masa m sobre un plano inclinado y liso que forma un
angulo θ con la horizontal.
a) Determınese la aceleracion del bloque cuando se deja resbalar libremente.
b) Supongase que se deja resbalar el bloque desde la parte superior del plano y
que la distancia hasta la base es d. ¿Cuanto tarda el bloque en llegar a la parte
inferior? ¿Cual es su velocidad?
(Respuestas : a) ax = g sen θ; ay = 0; b) t =√
2d/g sen θ; vx =√
2gd sen θ )
2. Determınese la aceleracion de las masas y la tension de la cuerda de una maquina
de Atwood formada por dos masas m1 y m2 y una polea de peso despreciable y
sin rozamiento. Hagase la aplicacion al caso: m1 = 2 kg, m2 = 4 kg.
(Respuestas : a) a = gm2 −m1
m1 +m2
; T = 2gm1m2
m1 +m2
; a = 3,3 m/s2; T = 26,2 N)
3. Dos masas distintas estan sujetas por una cuerda a traves de una polea, como se
ve en la Figura. Si el bloque de masa m2 esta sobre un plano inclinado y liso que
forma un angulo θ con la horizontal, determınese la aceleracion de las dos masas
y la tension de la cuerda. Aplıquense las ecuaciones obtenidas al caso m1 = 10
kg, m2 = 5 kg y θ = 45o.
(Respuestas : a = gm2 sen θ −m1
m1 +m2
; T = g sen(θ+1)m1m2
m1 +m2
; a = −4,23 m/s2,
T = 55,82 N)
m1
m2
θ
4. Una partıcula de masa 0,4 kg esta sometida a la accion de dos fuerzas, ~f1 = 2~i−4~j
y ~f2 = −2,6~i+5~j, donde todos los componentes se dan en newtons. Si la partıcula

92 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
esta en el origen de coordenadas en t = 0, determina su posicion y velocidad
cuando t = 1,6 s.
(Respuestas : ~r = (−1′92, 3′20) m; ~v = (−2′4, 4′0) m/s)
5. Una partıcula de masa m esta suspendida de una cuerda de longitud L y se mueve
con velocidad constante en un cırculo horizontal de radio r. Si la cuerda forma
un angulo θ con la vertical, determınese su tension y la velocidad de la partıcula.
(Respuestas : T = mg/ cos θ; v =√Lg sen θ tan θ)
6. Se hace girar un cubo de agua en una trayectoria vertical de radio r. Si la velocidad
del cubo en el punto mas alto es vt, determinar la fuerza ejercida por el cubo sobre
el agua. Calcula tambien el valor mınimo de vt para que el agua no se salga del
cubo.
(Respuestas : N = m(v2t /r − g); vt =
√gr)
7. Despreciando el rozamiento y las masas de las poleas y de las cuerdas, determina
la masa m2 en el sistema de la figura para que la aceleracion de la masa m3 sea
0,45 m/s2 hacia abajo. Los valores de las otras masas son: m1 = 200 g, m3 = 300
g.
(Respuestas : m2 = 0,104 kg)

3.10. PROBLEMAS 93
m1 m
2
m3
8. Un globo con todos sus accesorios pesa 200 kg y desciende con una aceleracion 10
veces menor que la de la gravedad. Calcula la masa de lastre que ha de arrojarse
para que ascienda con esa misma aceleracion.
(Respuestas : m = 36,36 kg)
9. Un montacargas de 1200 kg de masa parte del reposo y alcanza una velocidad de
6 m/s al ascender 12 m. Calcula:
a) La aceleracion con que asciende.
b) La tension del cable que lo soporta.
(Respuestas : a = 1,5 m/s2; T = 13560 N)
10. Una partıcula de masa m = 10 kg, sometida a la accion de una fuerza f =
120 t+ 40 N se desplaza en una trayectoria rectilınea. Cuando t = 0, la partıcula
se encuentra en x0 = 5 m con una velocidad v0 = 6 m. Obtengase su velocidad y
posicion instantaneas.
(Respuestas : v(t) = 6 + 4t+ 6t2 m/s; x(t) = 5 + 6t+ 2t2 + 2t3 m)

94 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
11. Los objetos A y B de la figura pesan 200 y 300 g respectivamente. La polea
Q1 tiene el eje fijo, pero la Q2 puede moverse libremente. Calcula la tension en
la cuerda y la aceleracion de cada cuerpo. (Suponganse las poleas sin masas ni
rozamientos).
(Respuestas : a = −1,8 m/s2; TA = 1,6 N; TB = 3,2 N)
mB
mA
Q1
Q2
12. Una partıcula de masa m se mueve en el plano XY de modo que su vector posicion
es:
~r(t) = a cos(ωt)~i+ b sen(ωt)~j
siendo a, b y ω constantes positivas y a > b. Demuestra que la partıcula se mueve
en una elipse y que la fuerza que actua sobre ella esta siempre dirigida hacia el
origen.
13. Calcula el angulo de inclinacion que debe tener una rampa para que un cuerpo
al deslizar por ella sin rozamiento tarde el doble de tiempo en alcanzar la base
que si lo hiciese en caıda libre.
(Respuestas : θ = 30◦)
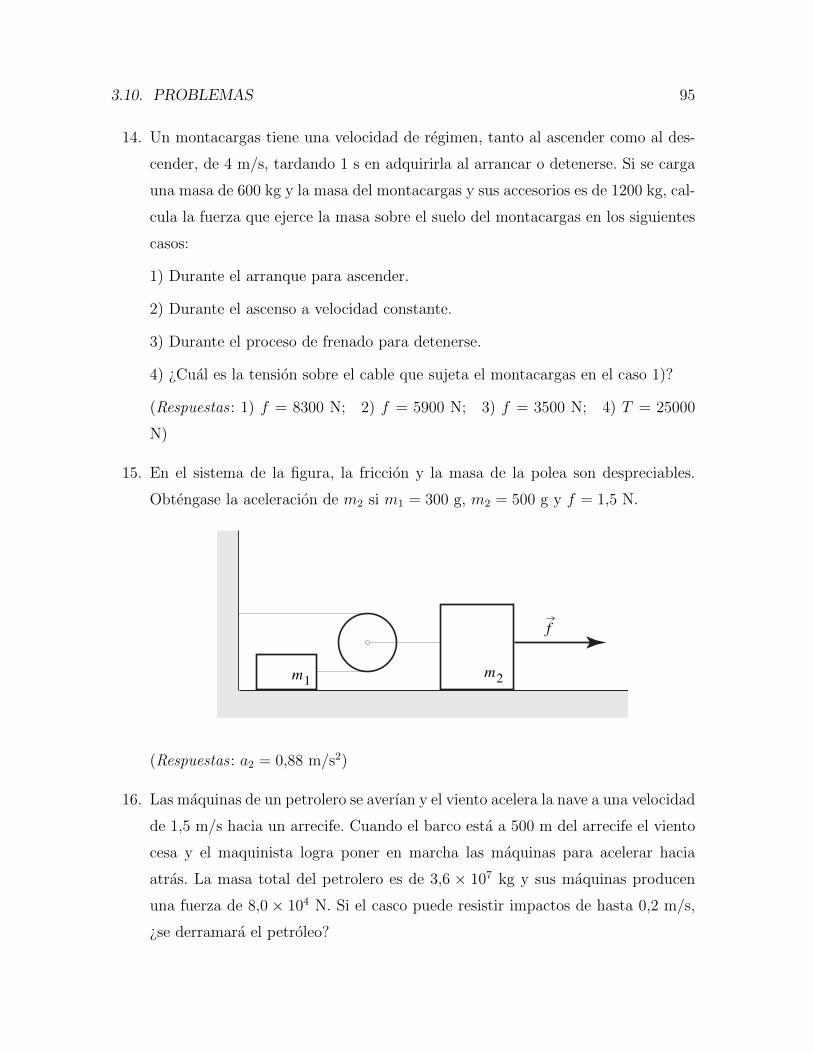
3.10. PROBLEMAS 95
14. Un montacargas tiene una velocidad de regimen, tanto al ascender como al des-
cender, de 4 m/s, tardando 1 s en adquirirla al arrancar o detenerse. Si se carga
una masa de 600 kg y la masa del montacargas y sus accesorios es de 1200 kg, cal-
cula la fuerza que ejerce la masa sobre el suelo del montacargas en los siguientes
casos:
1) Durante el arranque para ascender.
2) Durante el ascenso a velocidad constante.
3) Durante el proceso de frenado para detenerse.
4) ¿Cual es la tension sobre el cable que sujeta el montacargas en el caso 1)?
(Respuestas : 1) f = 8300 N; 2) f = 5900 N; 3) f = 3500 N; 4) T = 25000
N)
15. En el sistema de la figura, la friccion y la masa de la polea son despreciables.
Obtengase la aceleracion de m2 si m1 = 300 g, m2 = 500 g y f = 1,5 N.
m1
m2
f
(Respuestas : a2 = 0,88 m/s2)
16. Las maquinas de un petrolero se averıan y el viento acelera la nave a una velocidad
de 1,5 m/s hacia un arrecife. Cuando el barco esta a 500 m del arrecife el viento
cesa y el maquinista logra poner en marcha las maquinas para acelerar hacia
atras. La masa total del petrolero es de 3,6 × 107 kg y sus maquinas producen
una fuerza de 8,0 × 104 N. Si el casco puede resistir impactos de hasta 0,2 m/s,
¿se derramara el petroleo?

96 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
(Respuestas : El petroleo no se vertira.)
17. Una alumna muy inteligente se pregunta como sacar del barro su coche que ha
quedado atascado. para ello dispone de una cuerda con la que atar el coche a
un arbol proximo. Si es capaz de ejercer una fuerza de 300 N, ¿sera posible que
saque el coche del barro?
18. Una persona empuja un trineo por un camino horizontal nevado. Cuando el modu-
lo de la velocidad del trineo es 2,5 m/s, esa persona suelta el trineo y este se desliza
una distancia d = 6,4 m antes de detenerse. Determina el coeficiente de friccion
cinetica entre los patines del trineo y la superficie nevada.
(Respuestas : µc = 0,05)
19. Una masa de 45 kg es arrastrada en un trineo sobre un terreno horizontal cubierto
de nieve. El trineo es tirado por una cuerda que forma un angulo de 40o con la
horizontal. Si el trineo tiene una masa de 5 kg y los coeficientes de friccion estatica
y cinetica son µe = 0,2 y µc = 0,15, determina la friccion ejercida por el suelo
sobre el trineo y la aceleracion de este cuando la tension de la cuerda vale:
a) 100 N
b) 140 N
(Respuestas : a) fe = 85,2 N; a = 0; b) fc = 60 N; a = 0,94 m/s2)
20. Un coche viaja a 108 km/h por una carretera horizontal. Los coeficientes de
friccion entre la carretera y los neumaticos son: µe = 0,5; µc = 0,3 ¿Cuanto
espacio tarda el coche en frenar si:
a) el frenazo es fuerte pero el coche no llega a patinar?
b) el frenazo es muy brusco y el coche patina?
(Respuestas : a) d = 91,8 m; b) d = 153 m)
21. Un coche viaja por una carretera horizontal describiendo una circunferencia de 30
m de radio. Si el coeficiente de friccion estatica es µe = 0,6, ¿cual es la velocidad
maxima a la que puede ir el coche sin salirse de la curva?
3.10. PROBLEMAS 97
(Respuestas : vm = 47,8 km/h)
22. Una curva de 30 m de radio tiene un angulo de peralte θ. ¿Cual debe ser este
peralte para que un coche pueda tomar la curva a 40 km/h aunque no haya
fuerzas de rozamiento?
(Respuestas : θ = 22,7◦)
23. Un bloque de masa m1 se apoya sobre un segundo bloque de masa m2, que a su
vez descansa sobre una mesa horizontal sin rozamiento. Se aplica una fuerza ~f
sobre el bloque de abajo. Los coeficientes de friccion estatica y cinetica (µe y µc)
entre los bloques se suponen conocidos.
a) Determina el valor maximo de f para que los bloques no deslicen entre si.
b) Determina la aceleracion de cada bloque cuando se supera ese valor.
(Respuestas : a) f = gµe(m1 +m2); b) a1 = gµc; a2 = (f − gµcm1/m2))
24. Un bloque de 50 kg es lanzado hacia arriba sobre un plano inclinado 30o. Si el
coeficiente de rozamiento entre el bloque y el plano es 0,2, calcula:
a) El tiempo que tarda en detenerse si se lanza con una velocidad inicial de 20
m/s.
b) ¿Con que velocidad retornara al punto de partida?
c) El tiempo que tarda en subir y bajar.
(Respuestas : a) t = 3,03 s; b) v = 13,9 m/s; c) 7,4 s)
25. Una pequena esfera de masa m esta colgada del techo de un vagon de ferrocarril
que se desplaza por una vıa con aceleracion a. ¿Cuales son las fuerzas que actuan
sobre la esfera para un observador inercial? ¿Y para uno no inercial en el interior
del vagon?
26. Dos bloques de 200 kg y 75 kg descansan sobre dos planos inclinados y estan
conectados mediante una polea tal y como indica la figura. Calcula:
a) la aceleracion del sistema.

98 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
b) la tension de la cuerda.
c) la aceleracion y la tension si el coeficiente de rozamiento entre los bloques y el
plano vale 0,2.
(Respuestas : a) a = 2,15 m/s2; b) T = 748,2 N; c) a = 0,69 m/s2; T = 727,2
N)
B
A
β=53o
α=37o
27. En el instante t = 0, un paracaidista que tiene peso de magnitud mg esta situado
en z = 0 y se mueve con velocidad v0. Suponiendo que la fuerza de rozamien-
to debida al aire es proporcional a su velocidad, halla su velocidad, posicion y
aceleracion en cualquier instante de tiempo.
(Respuestas : v(t) =1
b
[mg − (mg − bv0)e−bt/m
]; z(t) = (mg/b)
[t+ (m/b)(e−bt/m − 1)
];
a(t) = ge−bt/m)
28. Un objeto se desliza sobre una superficie de hielo a lo largo de una lınea recta
horizontal. En cierto punto de la trayectoria la velocidad es v0 y despues de
recorrer una distancia xr el objeto se detiene. Compruebese que el coeficiente de
rozamiento es v20/2gxr.
29. Un bloque de hierro de masa ma = 7 kg es arrastrado sobre una mesa horizontal
por la accion de otra masa mb = 2 kg que cuelga verticalmente de una cuerda
horizontal unida al bloque de hierro y que pasa por una polea ideal. Si µc = 0,15,
determina la aceleracion y la tension de la cuerda.
(Respuestas : a = 1,0 m/s2; T = 17,6 N )

3.10. PROBLEMAS 99
30. Un convoy minero esta formado por n vagonetas con masas m1, m2, . . .mn.
Se supone que las ruedas deslizan sobre los raıles y que el coeficiente de friccion
cinetica entre las ruedas y los raıles, µc, es conocido. En esas condiciones, calcula:
a) La fuerza capaz de mover el sistema con velocidad constante y la tension en
los enganches entre dos vagones cualquiera.
b) Si tiramos con una fuerza dada, T1, mayor que la calculada en el apartado
anterior, determina la aceleracion del sistema y la expresion general de la tension
para cualquier vagon.
(Respuestas : a) T1 = gµc∑n
i=1mi; Tj = gµc∑n
i=jmi; b) a = (1/M)(T1−µcgM);
c) Tj = T1(1− (1/M)∑j−1
i=1 mi) )
31. En el sistema representado en la figura, las masas de los cables y poleas son
despreciables. Si el coeficiente de rozamiento cinetico de la masa m2 con el plano
inclinado es µc, calcula la aceleracion del sistema.
(Respuestas : a = gm1 −m3 −m2(µc cosϕ− senϕ)
m1 +m2 +m3
)
m1
m2
m3
ϕ
32. En el sistema que se muestra en la figura, el coeficiente de rozamiento entre los
bloques es µ. Si se ejerce una fuerza, ~f , sobre el bloque de masa m1, ¿cual es la
aceleracion del sistema?
(Respuestas : a =f − µg(3m2 +m1)
m1 +m2
)

100 CAPITULO 3. LEYES DE NEWTON Y SUS APLICACIONES
m1
f
m2
33. Un bloque de 2 kg esta situado sobre otro de 4 kg que descansa sobre una mesa sin
rozamiento y sobre el que esta actuando una fuerza horizontal ~F . Los coeficientes
de friccion entre los bloques son µe = 0,3 y µc = 0,2 . a) ¿Cual es el valor maximo
de ~F que puede aplicarse para que el bloque de 2 kg no resbale sobre el de 4 kg?
b) Si ~F es igual a la mitad de este valor maximo, determinar la aceleracion de
cada bloque y la fuerza de friccion que actua sobre cada uno de ellos. c) Si ~F es
igual al doble del valor obtenido en a), calcula la aceleracion de cada bloque.
(Respuestas : a) F = 17,64 N; b) a1 = a2 = 1,47 m/s2; fr = 2,94 N; c)
a1 = 1,96 m/s2; a2 = 7,84 m/s2)

Capıtulo 4
Trabajo, energıa y conservacion dela energıa
4.1. Introduccion
En principio, si se conociera la fuerza que actua sobre una partıcula como funcion
del tiempo, ~f = ~f(t), serıa facil obtener la ecuacion de su trayectoria, ~r = ~r(t), que es
uno de los problemas fundamentales que se plantea la Mecanica Clasica:
~f(t) = m~a(t) −→ ~a(t) =~f(t)
m−→ ~v(t) =
∫~a(t) dt =⇒ ~r(t) =
∫~v(t) dt
Pero generalmente las fuerzas que actuan sobre las partıculas se conocen en Fısica en
funcion de su posicion y el metodo anterior no es aplicable. Por lo tanto, se introducen
nuevos conceptos (trabajo y energıa) con los que conociendo solo algunas propiedades
de la fuerza se pueden resolver muchos problemas.
4.2. Concepto de trabajo
4.2.1. Sistemas unidimensionales
Consideremos una fuerza, f , constante o variable, que actua sobre una partıcula
para provocar sobre ella un desplazamiento unidimensional. Se define el trabajo infini-
tesimal que realiza la fuerza sobre la partıcula para provocar un desplazamiento, dx,
como,
dW = fx dx,

102 CAPITULO 4. TRABAJO Y ENERGIA.
donde fx es la componente de la fuerza en la direccion del desplazamiento. Para un
desplazamiento finito, entre dos puntos x1 y x2, se define el trabajo como:
W =
∫ x2
x1
fx dx
Es decir, que en problemas unidimensionales, el trabajo realizado por una fuerza no es
mas que el area encerrada bajo la curva, fx = fx(x).
Como por definicion el trabajo es una fuerza por un desplazamiento, sus dimensio-
nes son: [W ] = ML2T−2 y sus unidades en el sistema internacional son N.m, que se
denomina joule o julio y se representa como J. En el sistema cegesimal, la unidad del
trabajo es el ergio (erg) que se define como 1 erg= 1 dina ×1 cm. Factor de conversion:
1 J= 107 erg.
x1
x2
x x1
x2 x
fuerza variablefuerza constantefx fx
Conviene resaltar que el concepto de trabajo en Fısica no se corresponde exac-
tamente con la nocion que tenemos en la vida cotidiana. Por ejemplo, empujar una
pared, aunque, por supuesto, no consigamos derribarla, supone un trabajo en la vida
ordinaria, pero en Fısica, como no hay desplazamiento, el trabajo realizado es nulo.
Igual sucede cuando un levantador de pesas no consigue elevarlas o cuando sujetamos
un objeto en el aire sin desplazarlo.
4.2.1 Ejemplo
Un bloque apoyado sobre una mesa sin rozamiento esta sujeto a un muelle horizontal
que ejerce una fuerza f = −k x, donde k = 400 N/m. El bloque se comprime hasta

4.2. CONCEPTO DE TRABAJO 103
la posicion xi = −5 cm. Calcula el trabajo que realiza para llevar el bloque hasta la
posicion xf = 0.
mk
xixf
Resolveremos el problema de dos maneras, analıticamente y geometricamente a par-
tir de la representacion de la funcion fuerza.
i) Analıticamente.
W =
∫ xf
xi
f(x) dx =
∫ xf
xi
(−kx) dx = −kx2
2
]xfxi
= −k2
(x2f − x2
i
)= 0,5 J
ii) Geometricamente1.
f
xx fxi
b
a
W =1
2b a =
1
2(xf − xi)f(xi) = 0,5 J
1Notese que el trabajo, en general, puede tener un valor positivo o negativo. Con el metodogeometrico solo se puede obtener el valor del trabajo en modulo, puesto que un area es, por defi-nicion, un numero positivo.

104 CAPITULO 4. TRABAJO Y ENERGIA.
4.2.2. Expresion general de trabajo
Consideremos ahora una partıcula con vector de posicion ~r desplazandose en el
espacio bajo la accion de una fuerza, ~f , variable. Se define el trabajo realizado por la
fuerza como:
W =
∫ f
i
~f.d~r.
En componentes,
W =
∫ f
i
(fx dx+ fy dy + fz dz).
La integral se evalua sobre la curva que conforma la trayectoria de la partıcula y se
denomina por esa razon integral de lınea. En general, cuando evaluamos el trabajo que
realiza una fuerza para trasladar la partıcula desde i hasta f , no es lo mismo hacerlo por
la trayectoria c1 que por la c2. En cada caso la integral se realizara de forma diferente
y los resultados seran distintos.
i
f
c1
c2
4.2.2 Ejemplo
Calculese el trabajo realizado por la fuerza ~f = xy~i (N) para desplazar una partıcula
desde i : (0, 3) hasta f : (3, 0) a lo largo de las trayectorias:
1) Recta que une i y f .
2) Arco de la circunferencia centrada en el origen de coordenadas que pasa por esos
puntos.

4.2. CONCEPTO DE TRABAJO 105
c1
c2
i
f
y
x
1) Ecuacion de la recta: y = 3− x.
Wif =
∫ f
i
~f.d~r =
∫ f
i
xy dx =
∫ 3
0
x(3− x) dx =3
2x2 − x3
3= 4,5 J.
2) Ecuacion de la circunferencia: x2 + y2 = 9.
Wif =
∫ f
i
xy dx =
∫ f
i
x(9− x2)1/2 dx.
Haciendo el cambio de variables: u ≡ 9− x2 resulta −2xdx = du.
Wif = −1
2
∫u1/2 du = −1
�2
�2
3u3/2 = −1
3(9− x2)3/2
]3
0
=1
393/2 J = 9 J
Como vemos, el trabajo realizado en las dos trayectorias, aunque coincidan los puntos
inicial y final son diferentes.
En un desplazamiento infinitesimal, la expresion general del trabajo viene dada por:
δW = ~f.~dr.
La notacion, δ, para el trabajo elemental se utiliza en algunos libros para representar
que depende de la trayectoria recorrida. Se dice que la diferencial es inexacta.
Cuando varias fuerzas, {fi} (i = 1, 2 . . . n) actuan sobre una partıcula, el trabajo
neto es la suma de cada uno de los trabajos:
dW =n∑i=1
dWi =n∑i=1
~fi.d~ri.

106 CAPITULO 4. TRABAJO Y ENERGIA.
4.3. Potencia
Desde un punto de vista practico, es a menudo mas interesante saber no solo el
trabajo realizado por una fuerza sobre un objeto, sino la rapidez con que se realiza.
Esto es especialmente importante en Ingenierıa, donde es relevante tanto el trabajo que
realiza, por ejemplo, un motor como el tiempo que tarda en ejecutarlo.
Se define la potencia media al realizar un trabajo W como:
Pm =W
t,
donde t es el tiempo que se emplea en su realizacion. Las dimensiones de la potencia
son:
[Pm] =[W ]
t=ML2T−2
T= ML2T−3.
Unidades habituales de la potencia:
S.I. −→ watio (W)=J/s
Caballo de vapor (CV) −→ 1 CV=735,50 ' 736 W. Se define como la potencia
necesaria para elevar una masa de 75 kg 1 metro de altura en 1 s. No debe
confundirse con el horsepower (HP o hp), unidad de potencia de origen anglosajon
equivalente a 745,70 ' 746 W.
A partir del watio se define una unidad de trabajo muy utilizada, el kw.h:
1 kw.h = 1000 J/s× 3600 s = 3,6× 106 J.
Se define la potencia instantanea realizada por una fuerza como:
P = lımt→0
W
t=dW
dt,
es decir, es el trabajo infinitesimal realizado por la fuerza por unidad de tiempo. De
otro modo:
dW = ~f.d~r = ~f.~v dt −→ P =dW
dt= ~f.~v.

4.4. ENERGIA CINETICA. TEOREMA TRABAJO-ENERGIA 107
4.3.1 Ejemplo
Un elevador tiene una masa de 1000 kg y lleva una carga de 800 kg. Una fuerza de
rozamiento constante de 4000 N se opone a su movimiento. ¿Cual debe ser la potencia
mınima del motor para subir la carga con una velocidad constante de 3 m/s?
Fuerzas sobre el ascensor:
T − fr − (ma +mc)g = 0 −→ T = fr + (ma +mc) g = 2,16× 104 N
P = ~f.~v = ~T .~v = Tv = (fr +mg)v = 64,9 kW
¿Y si la aceleracion hacia arriba fuese 1 m/s2
T − fr −mg = ma −→ T = fr +mg +ma = 2,34× 104 N
=⇒ P = Tv = 2,34× 104 × v (W)
donde v es la velocidad instantanea del ascensor.
4.4. Energıa cinetica. Teorema trabajo-energıa
Todo cuerpo en movimiento tiene la capacidad de realizar un trabajo a partir de
una disminucion de su velocidad. Como ejemplos se pueden considerar un martillo
golpeando un clavo, una bala impactando contra una pared de acero o una piedra
golpeando a otra piedra. Estos hechos sugieren estudiar con mas detalle la relacion
existente entre el estado de movimiento de una partıcula y su posible capacidad para
realizar trabajo.
Como la fuerza que la partıcula ejerce sobre el exterior es la misma que se ejerce
sobre ella (principio de accion y reaccion):
dW = ~f.d~r = m~a.d~r = m~a.~vdt = m~v.d~v
Por otra parte, se puede expresar:
d(v2) = d(~v.~v) = 2~v.d~v

108 CAPITULO 4. TRABAJO Y ENERGIA.
Sustituyendo en la primera ecuacion:
dW = ~f.d~r =1
2md(v2) −→ W =
∫ f
i
~f.d~r =1
2m
∫ f
i
d(v2) =1
2mv2
f −1
2mv2
i
W = ∆
(1
2mv2
)≡ ∆Ec
Este resultado se denomina teorema trabajo-energıa. La magnitud Ec = (1/2)mv2 se
llama energıa cinetica de la partıcula y el teorema afirma que el trabajo que realiza la
partıcula es igual a la variacion de su energıa cinetica. Pero tambien se puede interpre-
tar en sentido opuesto. Para cambiar la energıa cinetica de la partıcula hay que realizar
un trabajo sobre ella que es igual a su variacion.
La energıa cinetica es una magnitud escalar, que solo depende de la masa y la
velocidad de la partıcula y que tiene las mismas dimensiones que el trabajo ([Ec] =
ML2T−2). No puede ser nunca negativa.
4.5. Fuerzas conservativas y energıa potencial
Se dice que una fuerza es conservativa si el trabajo que realiza para trasladar una
partıcula desde un punto cualquiera i hasta otro cualquiera f es independiente de la
trayectoria que recorre la partıcula.
i
f
y
x
y
x
i
O de modo equivalente, una fuerza es conservativa si el trabajo que realiza sobre
una partıcula cuando esta describe una trayectoria cerrada es cero. Matematicamente:∮~f.d~r = 0.

4.5. FUERZAS CONSERVATIVAS Y ENERGIA POTENCIAL 109
Basandonos en esta definicion, si una fuerza es conservativa siempre se puede definir
una funcion, U , de manera que el trabajo realizado por la fuerza sea, Wif = Ui − Uf .Esto es una expresion matematica de que el trabajo solo depende de las caracterısticas
de los estados inicial y final de la partıcula.
∆U = Uf − Ui = −Wif = −∫ f
i
~f.d~r.
En un desplazamiento infinitesimal:
dU = −~f.d~r.
Esta funcion, U , con dimensiones de trabajo o energıa se denomina energıa potencial
asociada a ~f .
4.5.1 Ejemplo
Energıa potencial del campo gravitatorio terrestre (en las proximidades de la superficie
de la Tierra).
dU = −~f.d~r = −~P .d~r.
Si elegimos ~P = −mg~j,
dU = mgdy −→ U = U0 +mgy,
donde U0 = U(y = 0).
Este es un ejemplo particular de una fuerza constante que es conservativa. Veremos
a continuacion que cualquier fuerza constante (en modulo, direccion y sentido) es con-
servativa. Sea ~f una fuerza vectorialmente constante que desplaza una partıcula desde
~ri hasta ~rf . Veremos que el trabajo que realiza para desplazarla solo depende de los
puntos inicial y final.
Wif =
∫ f
i
~f.d~r =
∫ f
i
fx dx+
∫ f
i
fy dy +
∫ f
i
fz dz = ~f.~rf − ~f.~ri.

110 CAPITULO 4. TRABAJO Y ENERGIA.
Luego el trabajo es independiente de la trayectoria, y entonces la fuerza es conservativa.
Para encontrar la energıa potencial asociada a esta fuerza hay que obtener la funcion
que verifica, Wif = Ui − Uf . En este caso es evidente que U = −~f.~r 2.
Pero no solo las fuerzas constantes son conservativas. Una fuerza dependiente de la
distancia, como es por ejemplo la que ejerce un muelle sobre una cierta masa es otro
ejemplo de fuerza conservativa.
4.5.2 Ejemplo
Supongamos un muelle horizontal unido a una masa m. La fuerza que ejerce el muelle
es proporcional a su elongacion y se puede poner como: f = −kx. Calculemos el trabajo
que hace el muelle para desplazar la masa entre dos puntos arbitrarios.
Wif =
∫ f
i
~f.d~r = −∫ xf
xi
kx dx = −k2
(x2f − x2
i ).
Luego el trabajo efectuado en una trayectoria arbitraria no depende de las peculiaridades
de la trayectoria, sino simplemente de las posiciones inicial y final de la partıcula. En
conclusion, la fuerza es conservativa.
Wif = −∆U −→ U = U0 +k
2x2.
Esta es la energıa potencial asociada al muelle. U0 es un valor de referencia que suele
tomarse igual a cero. De este modo, la energıa potencial del muelle en su posicion de
equilibrio (x = 0) es nula.
4.6. Analisis de curvas de energıa potencial
Supongamos por sencillez un sistema unidimensional con una unica coordenada x.
Si sobre el sistema actua una fuerza conservativa, f , se verifica:
dU = −~f.d~r = −fxdx.2A las fuerzas de friccion estatica o cinetica no se les puede aplicar el razonamiento anterior, ~ff =
−µN~v/v. Una fuerza es conservativa si en cualquier trayectoria el trabajo que realiza solo depende delos puntos inicial y final. Las fuerzas de friccion solo son constantes en trayectorias rectilıneas (siempreque no se modifique ~v), pero no en cualquier trayectoria. No lo demostraremos aquı pero son fuerzassiempre no conservativas.
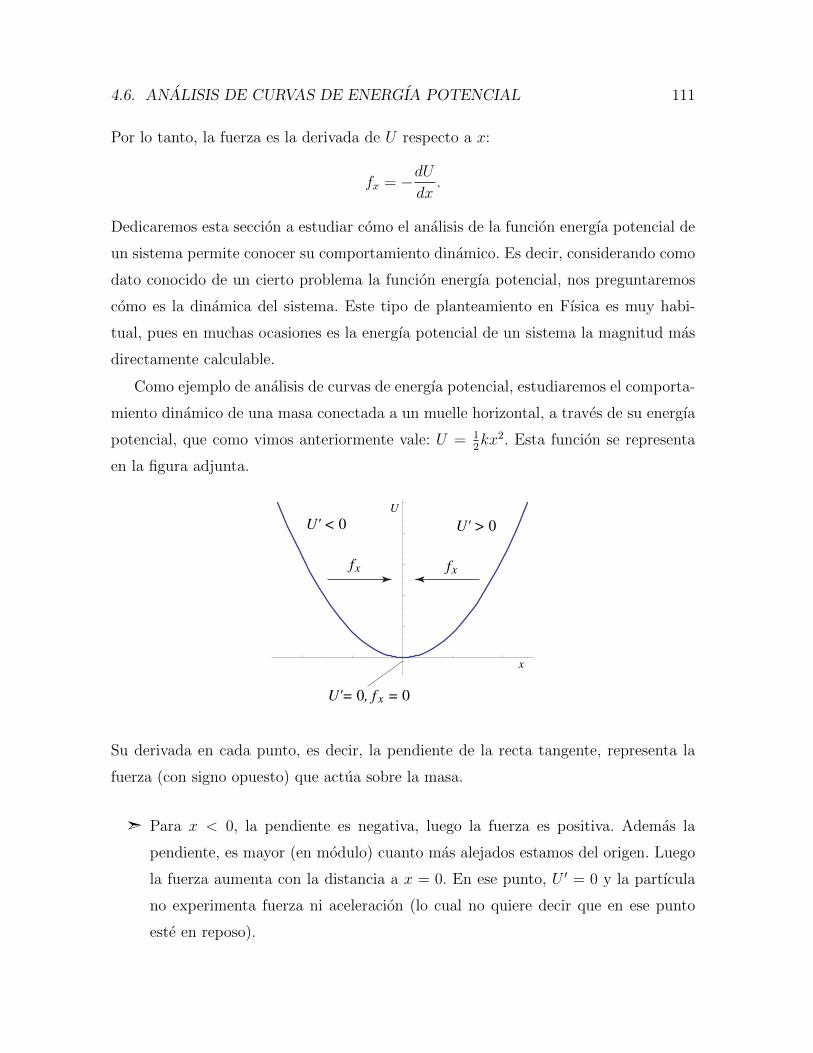
4.6. ANALISIS DE CURVAS DE ENERGIA POTENCIAL 111
Por lo tanto, la fuerza es la derivada de U respecto a x:
fx = −dUdx.
Dedicaremos esta seccion a estudiar como el analisis de la funcion energıa potencial de
un sistema permite conocer su comportamiento dinamico. Es decir, considerando como
dato conocido de un cierto problema la funcion energıa potencial, nos preguntaremos
como es la dinamica del sistema. Este tipo de planteamiento en Fısica es muy habi-
tual, pues en muchas ocasiones es la energıa potencial de un sistema la magnitud mas
directamente calculable.
Como ejemplo de analisis de curvas de energıa potencial, estudiaremos el comporta-
miento dinamico de una masa conectada a un muelle horizontal, a traves de su energıa
potencial, que como vimos anteriormente vale: U = 12kx2. Esta funcion se representa
en la figura adjunta.
U
x
U' < 0
fx
U' > 0
fx
U'= 0, f = 0x
Su derivada en cada punto, es decir, la pendiente de la recta tangente, representa la
fuerza (con signo opuesto) que actua sobre la masa.
ã Para x < 0, la pendiente es negativa, luego la fuerza es positiva. Ademas la
pendiente, es mayor (en modulo) cuanto mas alejados estamos del origen. Luego
la fuerza aumenta con la distancia a x = 0. En ese punto, U ′ = 0 y la partıcula
no experimenta fuerza ni aceleracion (lo cual no quiere decir que en ese punto
este en reposo).

112 CAPITULO 4. TRABAJO Y ENERGIA.
ã Para x > 0 −→ U ′ > 0, con lo cual la fuerza es negativa. Si esta situada
la partıcula inicialmente en x = 0, y se la somete a una pequena perturbacion
tratando de alejarla de ese punto, el muelle reacciona con una fuerza que se opone
a esa perturbacion y trata de retornar la partıcula a x = 0. Se dice que este punto
es de equilibrio estable. Matematicamente se caracteriza porque es un mınimo de
la funcion U = U(x): U ′ = 0 y U ′′ > 0.
Consideremos ahora otro tipo de funcion U = U(x), con un maximo local, tal y
como muestra la figura.
U
x
U' < 0
fx
U' > 0
fx
U'= 0, f = 0x
Ahora si la partıcula esta inicialmente en el maximo de la funcion (x = 0 en este
caso sencillo) y se ve sometida a una pequena perturbacion, la fuerza que experimenta
es tal que tiende a alejarla definitivamente de ese punto. Se dice que la posicion del
maximo de U , es un punto de equilibrio inestable. Puede haber tambien curvas de
energıa potencial con puntos de equilibrio indiferente o neutro que son aquellos puntos
de equilibrio, en que una pequena perturbacion hace que la partıcula pase a otro punto
de equilibrio adyacente. Geometricamente estas regiones son mesetas en U(x).

4.6. ANALISIS DE CURVAS DE ENERGIA POTENCIAL 113
U
x
equilibrio estable
equilibrio inestableequilibrio neutro
4.6.1 Ejemplo
La energıa potencial de un par de atomos (denominado potencial de Lennard-Jones)
de un gas tiene la forma:
U(x) = 4ε
[(σx
)12
−(σx
)6],
donde ε y σ son constantes que dependen de las peculiaridades de los atomos.
a) Obtenganse los estados de equilibrio.
b) Dibujese la curva de energıa potencial.
a)
dU
dx= 0 −→ −12σ12x−13 + 6σ6x−7 = 0 −→ 2σ6x−13 = x−7 =⇒ xe = 21/6σ.
Solo hay un punto de equilibrio y es facil demostrar que es estable. Basta comprobar
que U ′′(xe) > 0.
U(xe) = 4ε
[��σ12
22��σ12 −��σ
6
2��σ6
]= 4ε
[1
4− 1
2
]= −ε.
Ceros de la funcion:
U(x) = 0 −→(σx
)12
=(σx
)6
−→ x = σ.

114 CAPITULO 4. TRABAJO Y ENERGIA.
4 5 67 8
-100
-50
50
100
150
U (x)
x
x=21/6
x =2 σ1/6
e
U(x )= - εe
En el caso de sistemas tridimensionales se puede hacer un planteamiento semejante,
pero introduciendo un operador habitual en analisis diferencial en varias variables, que
es el concepto de gradiente3.
dU = −~f.d~r −→ ~f = −−−→∇U.
4.6.2 Ejemplo
Calculese la fuerza asociada a la energıa potencial dada por la funcion: U(x, y, z) =
k x2yz, donde k es una constante.
~f = −−−→∇U
fx = −∂U∂x
= −2kxyz
fy = −∂U∂y
= −kx2z
fz = −∂U∂z
= −kx2y
3Dada una funcion escalar, f = f(x, y, z), se define su gradiente en coordenadas cartesianas, comoel vector dado por:
−→∇f =
∂f
∂x~i+
∂f
∂y~j +
∂f
∂z~k.

4.7. CONSERVACION DE LA ENERGIA 115
=⇒ ~f = −k(2xyz~i+ x2z~j + x2y~k).
4.7. Conservacion de la energıa
4.7.1. Sistemas conservativos
Supongamos una fuerza conservativa actuando sobre una partıcula. Segun el teore-
ma trabajo-energıa, se verifica:
W =
∫ f
i
~f.d~r = ∆Ec.
Ademas, por ser la fuerza conservativa, existe una funcion energıa potencial que satis-
face:
W = −∆U.
Igualando ambas ecuaciones:
W = ∆Ec = −∆U −→ ∆(Ec + U) = 0 −→ Ec + U ≡ E = cte.
La suma de las energıas cinetica y potencial de la partıcula recibe el nombre de energıa
mecanica. Y la ecuacion que acabamos de demostrar significa que si sobre una partıcula
solo actuan fuerzas conservativas, la energıa mecanica total, E = Ec + U , permanece
constante. De aquı el nombre de fuerza conservativa.
U
x
E
xr-xr
U
Ec

116 CAPITULO 4. TRABAJO Y ENERGIA.
Es interesante dar una interpretacion geometrica a este principio. Supongamos que
una fuerza conservativa con energıa potencial, U , actua sobre la partıcula. Como la
energıa mecanica es constante, se puede representar mediante una lınea horizontal de
un grafico que representa las energıas del sistema frente a su posicion. En cualquier
punto, U viene dada por la curva, U = U(x), y la diferencia con E sera la energıa
cinetica de la partıcula. Ası por ejemplo en un estado de equilibrio, como el de la
figura, la energıa potencial es cero, y por tanto, E = Ec. En ese punto la velocidad
de la partıcula es maxima. Aquı se comprueba como en un estado de equilibrio la
partıcula no tiene porque estar en reposo. Su aceleracion es nula (no hay fuerzas),
pero su velocidad no tiene porque serlo. En los puntos de corte de E con U , Ec = 0.
Se denominan puntos de retorno y en ellos cambia el modulo de la velocidad de la
partıcula y la energıa potencial es maxima.
Conociendo la energıa mecanica y potencial de una partıcula, calcular su velocidad
en cualquier posicion es sencillo a partir de esta expresion:
1
2mv2 + U(x) = E −→ v =
[2
m(E − U(x))
]1/2
.
4.7.1 Ejemplo
Un esquiador inicialmente en reposo en lo alto de una pista (a una altura h respecto
a la horizontal) se dispone a iniciar un descenso. Calculese su velocidad en funcion de
la altura.
h
y
v(y)
t=0 t

4.7. CONSERVACION DE LA ENERGIA 117
Si despreciamos el rozamiento, la unica fuerza que actua sobre el es la gravitatoria,
que es conservativa. Para calcular E podemos utilizar cualquier instante, por ejemplo,
el inicial. En este punto:
E =����1
2mv2 +mgh = mgh
En otro punto cualquiera (cuando el esquiador esta a una altura y respecto a la hori-
zontal):
E =1
2mv2 +mgy = mgh −→ v = [2g(h− y)]1/2 .
4.7.2. Sistemas no conservativos
Cuando sobre un sistema actuan fuerzas no conservativas , su energıa mecanica
total no permanece constante. Supongamos una partıcula sometida tanto a fuerzas
conservativas como no conservativas:
~f = ~fc + ~fnc.
Como el teorema trabajo-energıa es valido para cualquier tipo de fuerzas:
Wt =
∫~fc.d~r +
∫~fnc.d~r = ∆Ec = Wc +Wnc.
Para la fuerza conservativa se puede definir una energıa potencial de forma que Wc =
−∆U . Entonces:
∆Ec = −∆U +Wnc −→ Wnc = ∆Ec + ∆U = ∆E.
Esta expresion se denomina teorema generalizado trabajo-energıa y significa que si sobre
una partıcula actuan fuerzas no conservativas, la variacion de su energıa mecanica total
es precisamente el trabajo que estas fuerzas ejercen sobre ella.
4.7.2 Ejemplo
Una nina de masa 17 kg comienza a deslizarse desde el reposo por un tobogan. La parte
superior esta a 2 m de altura sobre el suelo. Si su velocidad final es de 4,2 m/s, ¿cual
es el trabajo efectuado por las fuerzas de rozamiento?

118 CAPITULO 4. TRABAJO Y ENERGIA.
Las fuerzas que actuan sobre la nina son: peso, rozamiento con el aire y el tobogan
y fuerza normal. Las de rozamiento no son conservativas y la normal no ejerce trabajo,
luego el unico trabajo no conservativo es el asociado a las fuerzas de rozamiento:
Wnc = ∆E = ∆Ec + ∆U∆Ec = Ecf −��>0
Eci = Ecf = 12mv2
f
∆U = ���
0
Uf − Ui = −mgh
=⇒ Wnc = Ecf − Ui =1
2mv2
f −mgh = −180 J.
4.7.3. Principio de conservacion de la energıa
Macroscopicamente las fuerzas no conservativas siempre estan presentes. Las mas
familiares son las de rozamiento, pero existen otras (como las magneticas). Por ejemplo,
al empujar una caja sobre una superficie rugosa, podemos interpretar que la variacion de
energıa mecanica de la caja es igual al trabajo que hacemos para vencer el rozamiento.
Pero la experiencia dice que en el proceso, la superficie de contacto se calienta. Otra
forma de interpretar este hecho es diciendo que la energıa mecanica que se pierde se
transforma en otro tipo de energıa, la termica. Este tipo de ideas surgio en el s. XIX, con
el desarrollo de la Termodinamica. Hoy en dıa se admite que la energıa ni se crea ni se
destruye, simplemente se transforma. En Mecanica, solo se manejan habitualmente las
energıas cinetica, potencial y mecanica, pero si se incluyen otras energıas que provienen
de otras ramas de la Fısica, la energıa total siempre es constante. Otros tipos de energıa
son la interna (asociada a la estructura interna de un cuerpo), la quımica (que se pone
en juego al producirse reacciones quımicas), la electrica, la magnetica, etc. La ley de
conservacion de la energıa no tiene demostracion matematica, es un Principio y se
admite como tal. Se justifica diciendo que no se ha observado nunca ninguna situacion
fısica en que no se satisfaga.

4.8. PROBLEMAS 119
4.8. Problemas
1. Una caja de 4 kg se levanta desde el suelo hasta una altura de 3 m aplicando una
fuerza vertical hacia arriba de 60 N. Determina:
a) el trabajo realizado por la fuerza aplicada.
b) el trabajo realizado por la fuerza de la gravedad.
c) la velocidad final de la caja.
(Respuestas : a) W = 180 J; b) W = 62 J; c) vf = 5,57 m/s)
2. Una partıcula experimenta un desplazamiento ∆~r = 2~i−5~j (en el S.I.) a lo largo
de una lınea recta. Durante el desplazamiento actua sobre la partıcula una fuerza
constante ~f = 3~i+ 4~j (en el S.I.). Determina el trabajo realizado por la fuerza y
la componente de la fuerza en la direccion del desplazamiento.
(Respuestas : W = −14 J; fr = −2,6 N)
3. Un cajon de 48 kg es arrastrado 8 m por una rampa hacia arriba mediante una
cuerda de tension T = 540 N. Si el angulo que forma la rampa con la horizontal
es de 30o y el coeficiente de friccion cinetico es µc = 0,4, determina el trabajo
realizado por cada una de las fuerzas que actuan sobre el cajon.
(Respuestas : WT = 4,3 kJ; Wg = −1,9 kJ; WN = 0; Wr = −1,3 kJ)
4. Un objeto de 0,4 kg se mueve en una trayectoria circular de 0,5 m de radio
sobre un plano horizontal. El coeficiente de rozamiento es µc = 0,24. Determina
el trabajo realizado por la fuerza de rozamiento cuando el objeto se mueve un
cuarto de vuelta.
(Respuestas : Wr = −0,74 J)
5. Un automovil que viaja a 48 km/h se puede detener en una distancia mınima
de 40 m cuando frena. Si el mismo automovil se encuentra viajando a 96 km/h,
¿cual es la distancia mınima que necesita para detenerse?
(Respuestas : d = 160,0 m)

120 CAPITULO 4. TRABAJO Y ENERGIA.
6. Un trineo comienza a deslizarse desde el reposo en la cima de una colina siguiendo
un camino cubierto de nieve y con el perfil de la figura. El tramo fq es circular
con radio R. Despreciando cualquier tipo de rozamiento:
a) Determina el modulo de la velocidad del trineo en f .
b) ¿Cual es la fuerza normal ejercida por la superficie en ese punto?
c) ¿Cuanto valen el modulo de la velocidad y la fuerza normal en el punto q?
(Respuestas : a) vf = (4gR)1/2; b) N = 5mg; c) vq = (2gR)1/2 m/s; N =
2mg)
i
f
qR
R
2R
7. Considerese un automovil de masa m que se acelera hacia arriba por una pen-
diente que forma un angulo θ con la horizontal. Supongase que la magnitud de
la fuerza de rozamiento que se opone a su movimiento esta dada por:
fa = 218 + 0,7 v2 (N)
Calculese la potencia que debe suministrar el motor. En particular, considerese
el caso, m = 1450 kg, v = 97,2 km/h, a = 1 m/s2 y θ = 10o.
(Respuestas : P = mav+mvg sen θ+218 v+0,7 v3 = 52,0+89,0+7, 9+18,0 = 167,0
CV)
8. Un pendulo formado por una cuerda de longitud L y una partıcula de masa m
forma inicialmente un angulo θ0 con la vertical. Determina la velocidad de la

4.8. PROBLEMAS 121
partıcula y la tension de la cuerda en el punto mas bajo de la trayectoria cuando
se deja oscilar libremente desde el reposo.
(Respuestas : v = [2gL(1− cos θ0)]1/2; T = mg(3− 2 cos θ0))
9. Un muelle de constante k esta colgado verticalmente. Se ata a su extremo libre
una masa m y se deja el sistema libre desde el reposo. Determina la maxima
distancia que cae el bloque.
(Respuestas : ym =2mg
k)
10. Determina para una maquina de Atwood de masas m1 y m2 la velocidad de los
bloques cuando el mas pesado desciende una altura h.
(Respuestas : v2 = 2m2 −m1
m1 +m2
gh)
11. Una partıcula esta sometida a una fuerza ~f = 6xy~i+ 3(x2− y2)~j (N). Calcula el
trabajo realizado por esta fuerza para desplazar la partıcula del punto O = (0, 0)
al A = (1, 1) (coordenadas en metros), a lo largo de cada uno de estos caminos:
1) De O a B = (1, 0) por una recta horizontal y de B a A por una recta vertical.
2) De O a A a lo largo de la recta y = x.
3) De O a A a lo largo de la parabola y = x2.
(Respuestas : W = 2 J en los tres caminos.)
12. El vector posicion de una partıcula de masa 2 kg que se mueve en el espacio viene
dado por ~r = 3t3~i+(t2 + t+1)~j+(2t+3)~k, expresado en el S.I. Hallese el trabajo
experimentado por la partıcula en el quinto segundo.
(Respuestas : W = 29,9 J)
13. Calcula la energıa potencial asociada a las siguientes fuerzas centrales: a) f = k r;
b) f = k/r2, donde en ambos casos k es una constante arbitraria.
(Respuestas : a) U(r) = −kr2
2; b) U(r) =
k
r)

122 CAPITULO 4. TRABAJO Y ENERGIA.
14. Deduzcanse las ecuaciones de movimiento de una partıcula en una dimension
sometida a una fuerza constante a partir de la conservacion de la energıa.
(Respuestas : x =f
2mt2 +
(2E
m
)1/2
t)
15. Un cuerpo cae a traves de un fluido viscoso partiendo del reposo y de una altura
y0. Calcula la velocidad con la que se disipa su energıa.
(Respuestas :d(Ec + U)
dt= −(mg)2
B)
16. La figura muestra un sistema bidimensional formado por dos muelles de constan-
tes k1 y k2. Determina las componentes de la fuerza total experimentada por el
cuerpo conectado en el extremo de coordenadas (x, y).
(Respuestas : ~f = −[k1x+ k2(x− c)]~i− y(k1 + k2)~j)
y
x
k1k2
(x,y)
(0,0) (c,0)
17. Una partıcula de masa m esta colocada en el punto mas alto de una esfera lisa
de radio a. La partıcula se desplaza ligeramente sobre la esfera. ¿En que punto
se separa de ella? ¿Cual es la velocidad en ese punto?
(Respuestas : θ = 41,8o; v =
(2ga
3
)1/2
)
18. Una partıcula esta sometida a una fuerza ~f = xy~i (N). Calcula el trabajo reali-
zado por esa fuerza para desplazar la partıcula del punto A : (0, 3) al B : (3, 0) a
lo largo de los siguientes caminos:

4.8. PROBLEMAS 123
1) A lo largo de la recta que une A y B.
2) A lo largo del arco de circunferencia con centro en el origen de coordenadas y
extremos A y B.
(Respuestas : a) W = 4,5 J; b) W = 9 J)
19. El potencial 6− 12 de Lennard-Jones representa de forma realista la interaccion
entre dos atomos separados una distancia r:
VLJ = 4ε
[(σr
)12
−(σr
)6],
donde r = (x2 + y2 + z2)12 y ε y σ son parametros que dependen de las carac-
terısticas de los atomos. Calcula la fuerza que experimentan entre sı los atomos.
(Respuestas : ~f = −24ε
r2
[(σr
)6
− 2(σr
)12]~r)
20. Un pendulo de longitud ` y masa m esta conectado en su posicion de equilibrio
a un muelle horizontal de constante k tambien en equilibrio. Se eleva el pendulo
hasta que forma un angulo θ (muy pequeno) respecto a la vertical. ¿Cual sera la
velocidad del pendulo cuando pase por la posicion de equilibrio?
(Respuestas : v2 = θ2`
(g +
k
m`
))
21. Un muelle de constante elastica k y masa despreciable esta apoyado sobre una
superficie horizontal y mantiene su eje vertical. Sobre su extremo libre se apoya
una masa m y se comprime el muelle una longitud d, en cuyo momento se suelta.
Calcula:
a) La altura maxima que alcanza la masa.
b) ¿A que altura tendra la masa su velocidad maxima?
c) ¿Que valor tiene la velocidad maxima?
(Respuestas : a) ym =kd2
2mg; ymax =
d
2− mg
2k)
22. La funcion energıa potencial de una partıcula de masa 4 kg en un campo de
fuerzas viene descrita por: Ep = 3x2 − x3 para x ≤ 3 y Ep = 0 para x ≥ 3 en

124 CAPITULO 4. TRABAJO Y ENERGIA.
donde Ep se expresa en julios y x en metros. a) ¿Para que valores de x la fuerza
Fx es cero? b)Hagase un esquema de Ep en funcion de x. c) Discute la estabilidad
del equilibrio para los valores de x obtenidos en a). d) Si la energıa total de la
partıcula es 12J, ¿cual es su velocidad en x = 2m?
(Respuestas : a) x = 0; x = 2 m; x ≥ 3 m; d) v = 2 m/s)

Capıtulo 5
Sistemas de partıculas. Momentolineal y su conservacion
5.1. Introduccion
Hasta ahora hemos considerado la cinematica y la dinamica de partıculas indivi-
duales. Nuestro objetivo ahora se centra en sistemas formados por varias partıculas.
Estos sistemas pueden ser continuos o discretos, dependiendo del numero y distancia
relativa entre las partıculas que los componen. Veremos como en los dos casos la dinami-
ca del sistema se puede describir a partir de las leyes de Newton, pero introduciendo
algunos conceptos nuevos como los de centro de masas y momento lineal.
5.2. Centro de masas
5.2.1. Definicion
Se define el centro de masas de un sistema discreto de partıculas como:
~rcm =1
M
n∑i=1
mi~ri,
donde M es la masa total del sistema: M =n∑i=1
mi. De algun modo este punto re-
presenta la posicion en promedio de la masa del sistema. El motivo de su definicion
lo entenderemos a posteriori, cuando demostremos que el centro de masas de un sis-
tema, se comporta en cuanto a su movimiento de traslacion como si en el estuviese
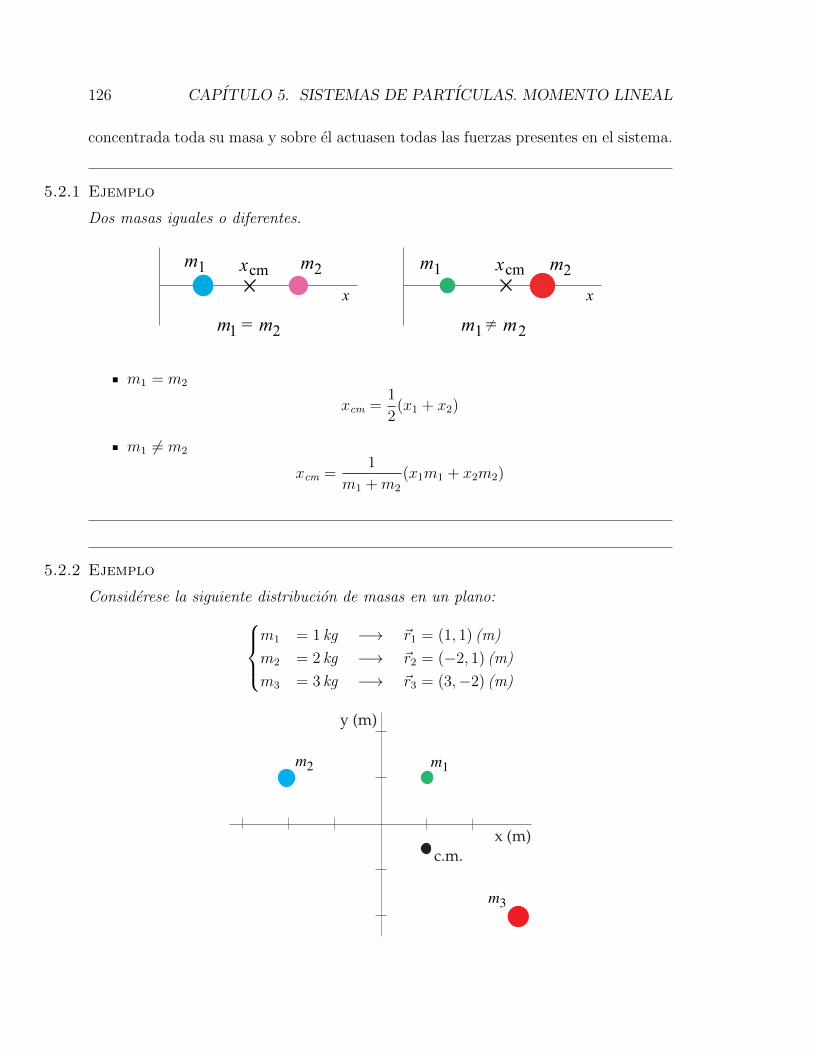
126 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
concentrada toda su masa y sobre el actuasen todas las fuerzas presentes en el sistema.
5.2.1 Ejemplo
Dos masas iguales o diferentes.
m1 m2
m =1 m2
x
m1 m2
m =1 m2
x
xcm xcm
/
m1 = m2
xcm =1
2(x1 + x2)
m1 6= m2
xcm =1
m1 +m2
(x1m1 + x2m2)
5.2.2 Ejemplo
Considerese la siguiente distribucion de masas en un plano:m1 = 1 kg −→ ~r1 = (1, 1) (m)
m2 = 2 kg −→ ~r2 = (−2, 1) (m)
m3 = 3 kg −→ ~r3 = (3,−2) (m)
m1
y (m)
x (m)
m2
m3
c.m.

5.2. CENTRO DE MASAS 127
La posicion del centro de masas viene dada por:
~rcm =1
M
3∑i=1
mi~ri
xcm =1
M
3∑i=1
mixi =1
6(1− 4 + 9) = 1 m
ycm =1
6(1 + 2− 6) = −1
2m
=⇒ ~rcm =
(1,−1
2
)(m)
A menudo un sistema fısico real no esta formado por partıculas identificables indivi-
dualmente, cuyas contribuciones puedan simplemente sumarse. Esto pasa con cualquier
objeto macroscopico, formado por moleculas, pero que observado desde una distancia
adecuada, puede considerarse como un continuo. Se define el vector de posicion del
centro de masas para un sistema continuo como:
~rcm =1
M
∫~r dm,
donde dm representa un elemento infinitesimal de masa localizado en la posicion ~r. Un
modo alternativo de expresar ~rcm es introduciendo la densidad1:
ρ(~r) =dm
dV
x
y
z
dm
r
1En sistemas bidimensionales es habitual definir la densidad superficial de masa como: σ = dm/dS,es decir, la masa por unidad de superficie y en sistemas unidimensionales se define la densidad linealde masa como: λ = dm/d`.

128 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
Esta es la definicion general de densidad de masa. Es una funcion local, que, en
general, depende del punto del cuerpo donde se calcule. Unicamente en sistemas uni-
formes u homogeneos , la densidad es independiente de la posicion, ρ 6= ρ(~r) y entonces
ρ = M/V , donde M y V son la masa y volumen total del sistema. La posicion del
centro de masas para un sistema heterogeneo sera:
~rcm =1
M
∫~rρ(~r) dV
Y si es homogeneo:
~rcm =ρ
M
∫~r dV =
1
V
∫~r dV
5.2.3 Ejemplo
Determınese el centro de masas de una varilla homogenea de longitud `.
x
dm
x
dx
l
0
Sea λ la densidad lineal de masa de la varilla, que es constante por ser la varilla
uniforme y dm un elemento diferencial de masa de longitud dx situado a una distancia
x del origen.
λ =m
`=dm
dx−→ dm = λ dx
xcm =1
m
∫xλ dx =
λ
m
∫x dx =
λ
m
x2
2
]`0
=λ
m
`2
2=`
2,
que es el resultado que cabrıa de esperar por ser el sistema homogeneo.

5.2. CENTRO DE MASAS 129
5.2.2. Movimiento del centro de masas
En general, describir el movimiento de un sistema formado por varias partıculas
es muy complicado, ya sea el movimiento de una molecula formada por varios atomos
(sistema discreto) o de un objeto macroscopico extenso y continuo. Veremos como el
estudio del movimiento del centro de masas del objeto facilita conocer el movimiento
del sistema. Supongamos, por ejemplo, un sistema discreto:
~rcm =1
M
n∑i=1
mi~ri −→ M~rcm =n∑i=1
mi~ri,
derivando respecto al tiempo:
Md~rcm
dt=
n∑i=1
mid~ridt
−→ M~vcm =n∑i=1
mi~vi,
y derivando otra vez,
Md~vcm
dt=
n∑i=1
mid~vidt
−→ M~acm =n∑i=1
mi~ai.
Segun la segunda ley de Newton, mi~ai, representa la fuerza neta resultante sobre cada
partıcula, ~fi. Esta fuerza siempre se puede descomponer en una suma de las fuerzas
externas e internas al sistema:
~fi = ~fi,int + ~fi,ext
Las internas se deben a las partıculas que forman el sistema entre sı. Obedecen el
principio de accion y reaccion, por lo que al sumar sobre todas las partıculas, la fuerza
neta debida a interacciones internas se anula:
M~acm =n∑i=1���>
0~fi,int +
n∑i=1
~fi,ext = ~Fext.
Es decir, que el centro de masas se mueve como si en el estuviese concentrada toda
la masa del sistema y sobre el actuasen todas las fuerzas externas presentes. Esta
ecuacion de movimiento permite solo describir la dinamica del centro de masas del
sistema. Veremos mas adelante como podemos estudiar el movimiento general de todo
el sistema. Aunque hemos hecho la deduccion solo para sistemas discretos, en el caso
de sistemas continuos el resultado que se obtiene es analogo.

130 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
5.3. Momento lineal
5.3.1. Definicion
� Partıcula unica.
Se define el momento lineal de una unica partıcula como la magnitud vectorial
~p = m~v. En el Sistema Internacional de unidades se mide en kg.m/s y sus dimen-
siones son [p] = MLT−1. Esta magnitud tambien recibe el nombre de cantidad
de movimiento. Veamos como se expresa la segunda ley de Newton en terminos
de ~p para un sistema formado unicamente por una partıcula 2:
d~p
dt= m
d~v
dt= m~a = ~f.
Es decir, que la fuerza neta que actua sobre la partıcula no es mas que la variacion
respecto al tiempo de su momento lineal.
� Sistema de partıculas.
Para un sistema de partıculas se define la cantidad de movimiento como:
~P =n∑i=1
~pi =n∑i=1
mi~vi = M~vcm.
Veamos como se expresa la segunda ley de Newton en este caso:
d~P
dt= M
d~vcm
dt= M~acm = ~Fext.
Es decir, que la variacion del momento lineal total del sistema coincide con la
fuerza externa que actua sobre el. El cambio de la cantidad de movimiento de
un sistema solo esta asociado a las fuerzas externas que actuan sobre el, porque
segun el principio de accion y reaccion la suma de todas las fuerzas internas se
cancela.
2Considerando la masa constante.
5.3. SISTEMAS DEL CENTRO DE MASAS Y DEL LABORATORIO 131
5.3.2. Conservacion del momento lineal
Hemos visto que tanto para una partıcula individual como para un sistema de
partıculas, la cantidad de movimiento solo se puede alterar si existe alguna fuerza
externa neta no nula. Dicho de otro modo,
~Fext = 0 −→ d~P
dt= 0 =⇒ ~P = ~cte.
Si la suma de todas las fuerzas externas es nula, la cantidad de movimiento del sistema
se conserva, es una constante del movimiento. Este principio de conservacion es una de
las leyes mas importantes de la Mecanica. Es mas amplia que la ley de conservacion
de la energıa en el sentido de que la energıa mecanica solo se conserva si todas las
interacciones son de caracter conservativo. En cambio, la conservacion del momento
lineal es independiente de la naturaleza de las fuerzas que actuan sobre el sistema.
Siempre que la accion externa neta sobre el se anula, ~P permanece constante. Se dice
entonces que el sistema esta aislado.
Conviene ademas destacar que ~P se conserva como una magnitud vectorial, es decir,
en modulo, direccion y sentido, lo que a efectos practicos permite plantear sistemas de
varias ecuaciones. Ejemplo tıpico de situaciones que se resuelven aplicando la conserva-
cion de la cantidad de movimiento son las colisiones, que estudiaremos a continuacion.
5.4. Sistemas de referencia del centro de masas y
del laboratorio
En problemas de sistemas de partıculas y, concretamente, de colisiones, es util definir
un sistema de referencia alternativo al habitual, el denominado sistema del laboratorio.
Por este se entiende un sistema de referencia (inercial) externo al sistema en estudio.
Es como si estuviesemos observando un hecho fısico en un laboratorio y tomasemos
como sistema de referencia el propio laboratorio.
Pero si la fuerza neta externa sobre el sistema es nula, la velocidad del centro de
masas permanece inalterada. Entonces, respecto al sistema de referencia original, el
centro de masas se desplaza con velocidad constante y se puede situar sobre el un
sistema de referencia inercial. Este sistema de referencia se denomina de centro de

132 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
masas . Con respecto a el, la velocidad del centro de masas es nula y por lo tanto,
tambien lo es el momento lineal total del sistema. Veamos como ejemplo el caso de dos
partıculas.
� Sistema de referencia del laboratorio:
v1v
2
m1
m2
vcm
c.m.
� Sistema de referencia del centro de masas:
~v′1 = ~v1 − ~vcm ; ~v′2 = ~v2 − ~vcm
v'1
c.m.
v'2
m1 m
2
v = 0cm
5.5. Colisiones
Denominaremos colision a una interaccion entre dos o mas objetos que tiene lugar
en un tiempo muy corto y en una region determinada del espacio. Esta interaccion
produce fuerzas entre los objetos que son mucho mas importantes que el resto de las
fuerzas que puedan existir. Esto conlleva que el momento lineal total se conserve, pues
las fuerzas externas en la colision se consideran despreciables frente a las existentes
entre las partıculas del sistema. En un choque dos objetos se acercan con velocidad
constante, interaccionan y se separan con velocidad otra vez constante. No estaremos
interesados en el proceso que tiene lugar en la propia colision, sino en el antes y el
despues, es decir, como obtener el estado final de movimiento de las partıculas a partir
del inicial.
En cualquier tipo de colision, el momento lineal total del sistema permanece cons-
tante:
~P =n∑i=1
~pi = ~cte.

5.5. COLISIONES 133
Esto se debe simplemente a que consideramos despreciable cualquier accion externa
sobre el sistema.
Tipos de colisiones:
? Colisiones elasticas: son aquellas en que ademas de conservarse ~P , se conserva la
energıa cinetica total del sistema.
? Colisiones inelasticas: son aquellas en que solo se conserva el momento lineal
total del sistema.
Colisiones perfectamente inelasticas son aquellas colisiones inelasticas en que
los objetos que interaccionan permanecen unidos despues del choque. Sus veloci-
dades finales son iguales entre sı e igual a la del centro de masas del sistema.
Estamos considerando que justo antes y justo despues de la colision no hay fuerzas
externas sobre las partıculas que colisionan, es decir, no tienen energıa potencial, solo
cinetica. Decir que en una colision elastica se conserva Ec es decir que durante la colision
se conserva la energıa mecanica total del sistema, o sea, que la fuerza de interaccion
justo en la colision es conservativa. Si no se conserva Ec es porque parte de ella se ha
convertido en trabajo no conservativo. En general, las colisiones reales son inelasticas.
La variacion de energıa cinetica se debe a la existencia de fuerzas conservativas que,
por ejemplo, varıan la forma del objeto. De este modo una parte de la energıa de la
colision se invierte en deformar el propio objeto y de ahı que la energıa cinetica quede
alterada en el choque.
5.5.1. Colisiones elasticas en una dimension
Consideremos dos partıculas que chocan segun la siguiente notacion en el sistema
de referencia del laboratorio:
vi1 v i2
m1 m
2
vf 1 vf 2
colisión
x
m1 m
2

134 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
Por el principio de conservacion del momento lineal (al ser un sistema en una
dimension se expresa mediante una unica ecuacion):
Pi = Pf −→ m1vi1 +m2vi2 = m1vf1 +m2vf2. (5.1)
Por ser el choque elastico, la energıa cinetica total del sistema tambien se conserva,
Eci = Ecf −→ 1
2m1v
2i1 +
1
2m2v
2i2 =
1
2m1v
2f1 +
1
2m2v
2f2. (5.2)
Sacando factor comun a las masas en las dos ecuaciones:
m1(vi1 − vf1) = m2(vi2 − vf2)1
2m1(v2
i1 − v2f1) =
1
2m2(v2
i2 − v2f2),
y dividiendo ambas ecuaciones:
vi1 + vf1 = vi2 + vf2 −→ vi1 − vi2 = −(vf1 − vf2) −→ vf2 − vf1 = −(vi2 − vi1)
Es decir, que la velocidad relativa (en modulo) de las partıculas se conserva en el
choque. Esta es una caracterıstica esencial de las colisiones elasticas en una dimension.
Si consideramos como datos de partida del problema las masas y las velocidades
iniciales, las velocidades finales se pueden obtener considerando (5.1) y (5.2) como un
sistema de dos ecuaciones con dos incognitas. Se puede resolver para obtener:
vf1 =
(m1 −m2
m1 +m2
)vi1 +
(2m2
m1 +m2
)vi2
vf2 =
(2m1
m1 +m2
)vi1 +
(m2 −m1
m1 +m2
)vi2,
Si consideramos como caso particular que la partıcula 2 esta en reposo (o fijamos sobre
ella el sistema de referencia) se verifica que:
vf1 =
(m1 −m2
m1 +m2
)vi1
vf2 =
(2m1
m1 +m2
)vi1,

5.5. COLISIONES 135
5.5.1 Ejemplo
m1 = m2
Si el objeto 2 esta inicialmente en reposo:
vf1 = 0; vf2 = vi1.
Es decir, que si dos masas iguales chocan, estando una inicialmente en reposo, despues
de la colision se mueve esta ultima con la velocidad de la incidente y esta queda en
reposo.
Si el objeto 2 no esta inicialmente en reposo:
vf1 = vi2; vf2 = vi1.
Las masas intercambian sus velocidades en la colision.
5.5.2 Ejemplo
m1 >> m2 y el objeto 2 esta inicialmente en reposo
vf1 ' vi1; vf2 ' 2vi1.
La velocidad del objeto incidente no varıa y la del menos masico se hace el doble que
la de aquel.
5.5.3 Ejemplo
m2 >> m1 y el objeto 2 esta inicialmente en reposo
vf1 ' −vi1; vf2 ' 0.
El objeto pequeno rebota hacia atras y el estado de movimiento del grande permanece
inalterado.

136 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
5.5.2. Colisiones inelasticas en una dimension
En general, un choque inelastico es dıficil de estudiar porque, como la energıa cineti-
ca no se conserva, solo existe una ecuacion (conservacion escalar de ~P ) para obtener
las dos velocidades finales. Por analogıa con el caso elastico se introduce el denominado
coeficiente de restitucion, e, que es la medida de la elasticidad de una colision. Se define
de forma que:
vf2 − vf1 = −e(vi2 − vi1)
{e = 1 −→ colision elastica
e = 0 −→ vf2 = vf1 −→ colision perfectamente inelastica
En una colision perfectamente inelastica las dos masas permanecen unidas tras el cho-
que. Es el caso, por ejemplo, de dos bolas de plastilina:
vi 1 vi 2
m1
m2
colisión
m + m1 2
v =f 1 v ≡ vf 2 f
Como se conserva la cantidad de movimiento:
m1vi1 +m2vi2 = (m1 +m2)vf −→ vf =m1vi1 +m2vi2m1 +m2
.
Un ejemplo de choque inelastico es el denominado pendulo balıstico, que es un disposi-
tivo valido para medir la velocidad de un proyectil que se mueve a gran velocidad.
5.5.4 Ejemplo
Supongamos un proyectil disparado con velocidad desconocida, vi1 sobre un bloque de
madera que se puede elevar tal y como muestra la figura:

5.5. COLISIONES 137
m1
vi1
m2
v =0i2
hcolisión
Energıa cinetica inmediatamente despues de la colision: Ec = 12(m1 +m2)v2
f .
Particularizando la ecuacion para vf en el caso vi2 = 0:
vf =m1
m1 +m2
vi1 −→ Ec =1
2
m21
m1 +m2
v2i1.
Despues del choque, la energıa cinetica se transformara en energıa potencial que eleva
el conjunto (no hay fuerzas no conservativas y la energıa mecanica se conserva):
1
2
m21
m1 +m2
v2i1 = (m1 +m2)gh −→ vi1 =
m1 +m2
m1
√2gh.
Mediante esta ecuacion podemos entonces determinar la velocidad del proyectil inci-
dente sin mas que medir la altura que se eleva el conjunto.
5.5.3. Colisiones en tres dimensiones
Los choques en dos o tres dimensiones son de mas difıcil tratamiento que los unidi-
mensionales. Para su tratamiento es basico considerar el caracter vectorial de ~P y su
conservacion. Supongamos el caso mas sencillo de una colision en un plano y de tipo
elastico. En este caso tendremos dos ecuaciones de conservacion del momento y otra de
conservacion de la energıa. Y, sin embargo, habra cuatro incognitas, dos por cada una
de las velocidades finales. Es decir, que el problema no se puede resolver completamente
si solo conocemos las velocidades iniciales. Hace falta obtener informacion adicional.
Consideremos como ejemplo un choque en un plano de una partıcula m1 de veloci-
dad inicial ~vi1 con otra m2 inicialmente en reposo.

138 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
vi1
v = 0i2
m1
m2
vf 1
vf 2
b
y
xm
1
m2
θ1
θ2
θ1
θ2
colisión
Conservacion de la cantidad de movimiento: ~Pi = ~Pf .
eje x : m1vi1 = m1vf1 cos θ1 +m2vf2 cos θ2
eje y : 0 = m1vf1 sen θ1 −m2vf2 sen θ2
Conservacion de la energıa cinetica:
1
2m1v
2i1 =
1
2m1v
2f1 +
1
2m2v
2f2.
datos −→ m1,m2, vi1
ecuaciones −→ 3
incognitas −→ vf1, vf2, θ1, θ2
Generalmente lo que se hace a nivel experimental es determinar la direccion de salida al
menos de una partıcula, con lo que las velocidades finales se pueden calcular resolviendo
el sistema correspondiente. Los estudios de este tipo son fundamentales en la Fısica
actual, pues permiten obtener informacion sobre las interacciones entre partıculas. Esto
es lo que se hace, por ejemplo, en los aceleradores de partıculas .
Aunque hemos visto como ejemplo el caso bidimensional, el tridimensional es analo-
go tanto en su planteamiento como en la dificultad de su resolucion. Simplemente
aparece un numero mayor de datos, ecuaciones e incognitas.

5.6. IMPULSO Y FUERZA MEDIA 139
5.6. Impulso y fuerza media
En nuestro estudio sobre los choques no hemos comentado nada acerca de la in-
teraccion entre las partıculas en el momento de la colision. Solo hemos supuesto que
esta fuerza de interaccion es muy intensa en comparacion con otras posibles y que
su duracion es muy corta. Si representamos esta interaccion en funcion del tiempo
obtendrıamos una grafica ası:
0 2 4 6 8 10
0.2
0.4
0.6
0.8
1
f
tt i t f
Antes de ti y despues de tf no existe interaccion y ∆t = tf − ti es el tiempo de
contacto, que puede ser del orden de 10−3 s para colisiones de objetos macroscopicos.
Se define el impulso como:
I =
∫ tf
ti
f(t) dt
Geometricamente representa el area bajo la curva f = f(t). Como segun la segunda
ley de Newton ~f = d~p/dt se tiene que:
I =
∫ tf
ti
f(t) dt =
∫ tf
ti
dp
dtdt =
∫ tf
ti
dp = pf − pi = ∆p
Es decir, que el impulso representa la variacion del momento lineal de un objeto durante
el choque. Evidentemente, el momento lineal de cada objeto en la interaccion varıa
aunque el total se mantenga constante porque despreciamos las fuerzas externas.
Se define el promedio temporal o fuerza media de una fuerza, fm como la fuerza
constante que produce el mismo impulso en el mismo intervalo de tiempo.

140 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
0 2 4 6 8 10
0.2
0.4
0.6
0.8
1
f
tt i t f
fm
A1
A2
A1 = A2 → fm∆t = A1 = I −→ fm =I
∆t
Este concepto es importante a la hora de estimar el orden de magnitud de la interaccion.
5.6.1 Ejemplo
Estımese la fuerza media ejercida por el cinturon de seguridad de un automovil sobre
un conductor de 80 kg cuando choca contra un obstaculo fijo a una velocidad de 90
km/h.
El coche comienza a decelerar cuando su parachoques toca el obstaculo. Si se deforma
1 m, este sera el espacio recorrido por el conductor hasta que este parado. Si suponemos
que la velocidad media durante la colision es la mitad de la velocidad inicial:
v =90
2km/h = 12,5 m/s
∆t =s
v=
1
12,5= 0,08 s
Aceleracion media:
am =∆v
∆t=
25
0,08= 312 m/s2
Esta aceleracion es aproximadamente 32 veces g, y la fuerza media es fm = mam =
25000 N. Esta es la fuerza que sujeta al conductor durante la colision. Si el conductor
no llevase cinturon de seguridad, la distancia de frenado serıa mucho menor, el tiempo
tambien y la aceleracion y la fuerza media serıan mucho mayores.

5.7. PROBLEMAS 141
5.7. Problemas
1. Determina el centro de masas de un alambre semicircular uniforme en funcion de
su radio.
(Respuestas : xcm = 0 ; ycm = 2R/π)
2. Halla el centro de masas del sistema formado por las dos barras uniformes de la
figura.
1 5
3
y (m)
x (m)
m =1 kg1
m =2 kg2
0
(Respuestas : ~rcm = (2.5, 0.5) m)
3. Halla el centro de masas de un objeto uniforme en forma de triangulo rectangulo.
Considera como datos su masa (M), y la longitud de sus catetos (a y b).
(Respuestas : ~rcm = (a/3, b/3) (orientando el cateto a segun el eje x y el b segun
el eje y)
4. Un proyectil de 10 g de masa se mueve horizontalmente con una velocidad de 400
m/s hasta empotrarse en un bloque de madera de 390 g situado sobre una mesa
horizontal pulida.
a) Calcula la velocidad final del sistema.
b) Calcula la energıa mecanica inicial y final del sistema.
(Respuestas : a) vf = 10 m/s; b) Ei = 800 J; Ef = 20 J)
142 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
5. Una caja de 2 kg se mueve hacia la derecha con una velocidad de 5 m/s y choca
con otra de 3 kg que se mueve en la misma direccion a 2 m/s. Si despues del
choque la caja de 3 kg se mueve a 4,2 m/s, determina:
a) la velocidad de la caja de 2 kg despues del choque.
b) el coeficiente de restitucion de la colision.
(Respuestas : a) vf1 = 1,7 m/s; b) e = 0,83)
6. Una bola de billar inicialmente en reposo debe tener un angulo de salida de 35o
al ser golpeada por otra de igual masa. ¿Cual es el angulo de salida de la bola
incidente?
(Respuestas : θ = 55o)
7. Una esfera A se mueve con una velocidad viA, choca con otra esfera B, inicial-
mente en reposo y esta, al salir despedida, choca a su vez con otra esfera, C,
tambien en reposo antes. Calcula la velocidad con que sale despedida la bola C.
Todos los choques se suponen frontales y elasticos y las relaciones entre las masas
son MA : MB : MC = 3 : 6 : 2.
(Respuestas : vfC = viA)
8. Sobre un saco de arena de 4 kg de masa colgado de un hilo se dispara un fusil cuya
bala tiene una masa de 40 g. La bala atraviesa el saco y recorre una distancia de
20 m antes de chocar contra el suelo, que se encuentra 1,5 m debajo del saco. Si
por el impacto de la bala el saco asciende 30 cm, calcula la velocidad de la bala
en el momento del impacto.
(Respuestas : vi = 278,6 m/s)
9. Un cuerpo de masa 5 kg se mueve sobre una mesa lisa con velocidad de 10
m/s y choca con otro de masa 10 kg que se desplaza en direccion perpendicular
al anterior con velocidad 5 m/s. Ambos bloques, despues del choque, quedan
unidos y se mueven juntos. Calcula la velocidad de ambos despues del choque,
su direccion y la perdida de energıa cinetica.

5.7. PROBLEMAS 143
(Respuestas : vf = 4,7 m/s; θ = 45o; ∆Ec = −208,3 J)
10. Un observador mide la velocidad de dos partıculas de masas m1 y m2 y obtiene
respectivamente los valores ~v1 y ~v2. Determina la velocidad del centro de masas
relativo a dicho observador y la velocidad de cada partıcula relativa al centro de
masas.
(Respuestas : ~vcm =m1~v1 +m2~v2
m1 +m2
; ~v′1 =m2
m1 +m2
~v12; ~v′2 = − m1
m1 +m2
~v12 )
11. Una partıcula α choca contra un nucleo de O2 inicialmente en reposo. La partıcula
se desvıa en una direccion que forma un angulo de 72o con la direccion del mo-
vimiento inicial y el nucleo de O2 se desvıa formando un angulo de 41o hacia el
lado opuesto de la partıcula α. ¿Cual es la razon entre las velocidades finales de
las dos partıculas? ¿Y entre las dos velocidades de la partıula α? (La masa del
nucleo de O2 es cuatro veces mayor que la de la partıcula α.)
(Respuestas :vfαvfo
= 2,76;vfαviα
= 0,71)
12. Un individuo de 80 kg se encuentra en el extremo de una tabla de 20 kg de masa
y 10 m de longitud que flota en reposo sobre la superficie de agua de un estanque.
Si el hombre se desplaza al otro extremo, a) ¿que distancia recorre la tabla? b)
¿Que distancia recorrerıa la tabla si el hombre se encontrara inicialmente en el
centro de la misma? (Considera despreciable el rozamiento con el agua).
(Respuestas : a) x = 8 m; b) x = 4 m)
13. Se dispara un proyectil con una velocidad de 200 y un angulo de elevacion de
π/3 (rad). Cuando se encuentra en el punto mas alto de su trayectoria explota
dividiendose en dos fragmentos iguales, uno de los cuales cae verticalmente. ¿A
que distancia del punto de lanzamiento caera el segundo fragmento?
(Respuestas : x2 = 5160 m)
14. Una bala de masa m se introduce en un bloque de madera de masa M que
esta unido a un resorte espiral de constante de recuperacion k. Por el impacto el
resorte se comprime una longitud x. Sabiendo que el coeficiente de rozamiento
entre el bloque y el suelo es µ, calcula la velocidad de la bala antes del choque.

144 CAPITULO 5. SISTEMAS DE PARTICULAS. MOMENTO LINEAL
(Respuestas : v2i =
2(m+M)x
m2
(kx
2+ µ(m+M)g
))
15. Demuestra que cuando un cuerpo colisiona oblicuamente con otro de masa mucho
mayor e inicialmente en reposo, si el choque es perfectamente elastico, el angulo
de incidencia coincide con el de reflexion.
16. Desde la azotea de un edificio de 64 m de altura dejamos caer una pelota. Si el
coeficiente de restitucion de los botes de la pelota en el suelo es e = 1/2, averigua
la altura que asciende sobre el suelo despues de botar tres veces.
(Respuestas : h3 = 1 m)
17. Estima la fuerza media ejercida por el cinturon de seguridad de un automovil
sobre un conductor de 80 kg cuando choca contra un obstaculo fijo a una velocidad
de 90 km/h.
(Respuestas : f = 25 kN)
18. Un soldado dispara un rifle con una masa mr = 3 kg. Si la bala pesa mb = 5 g
y la velocidad con la que sale del rifle es vb = 300 m/s, ¿cual es la velocidad de
retroceso del rifle?
(Respuestas : v3 = 0,02 m/s)
19. Siguiendo el esquema de la figura, se suelta un pendulo de longitud l = 120 cm y
de masa m = 100 g desde una posicion inicial que forma un angulo θi = 37o con
la vertical. Despues de la colision con la masa M = 300 g, el pendulo rebota hasta
una posicion θf = 20o y la masa M se desliza por la superficie hasta detenerse.
Si el coeficiente de friccion de la superficie con la masa M vale µc = 0,2, calcula
la distancia que recorre M hasta detenerse.
(Respuestas : d = 0,32 m)

5.7. PROBLEMAS 145
l
m
M
20. Un juguete consiste en tres bolas de acero de masas M , µ y m suspendidas en
ese orden de modo que sus centros forman una recta horizontal. La bola M se
separa y eleva en el mismo plano hasta que su centro queda elevado una altura
h. Si M 6= m y todas las colisiones son elasticas, ¿cuanto debe valer µ para que
la bola m alcance la maxima altura posible?
(Respuestas : µ = (mM)1/2)


Capıtulo 6
Dinamica de la rotacion
6.1. Cuerpo rıgido, traslacion y rotacion
En los temas anteriores hemos estudiado unicamente movimientos de traslacion
para partıculas y sistemas de partıculas. Hemos definido el centro de masas como
aquel punto que se comporta como si todas las fuerzas que actuan sobre el sistema se
concentraran en el. El movimiento de un cuerpo extenso se puede describir en terminos
del movimiento traslacional de su centro de masas y del movimiento de los puntos del
sistema respecto al centro de masas (por ejemplo, respecto a un eje que pasa por el).
Para completar, por lo tanto, el estudio del movimiento de un cuerpo extenso nos falta
estudiar esta ultima parte. Veremos que el estudio de este tipo de movimiento rotacional
es analogo al traslacional, pero introduciendo nuevas magnitudes fısicas que siempre
tienen su equivalente lineal. Por ejemplo, si la ecuacion de movimiento del centro de
masas de un cuerpo relaciona aceleracion con fuerzas externas, la de la rotacion, como
veremos, relaciona otro tipo de aceleracion (angular) con el momento de las fuerzas
aplicadas.
La principal hipotesis simplificadora en el estudio de movimientos rotacionales suele
ser la consideracion del objeto a estudiar como un cuerpo rıgido. Este es aquel sistema
en que la distancia entre dos puntos cualquiera no varıa con el tiempo. Es un sistema
que no se deforma. Consideraremos que un cuerpo rıgido describe un movimiento de
rotacion cuando cada una de sus partıculas (salvo las que estan sobre el eje) realiza un
movimiento circular.

148 CAPITULO 6. DINAMICA DE LA ROTACION
El movimiento mas general de un cuerpo rıgido tiene lugar cuando el eje de rotacion
cambia de direccion al mismo tiempo que se traslada. Esto sucede, por ejemplo, en
un pase de futbol con efecto: el eje no solo cambia de posicion en el tiempo, sino
que tambien varıa su orientacion. En este tema restringiremos nuestra discusion a la
rotacion de un cuerpo rıgido respecto a un eje que no cambia de orientacion.
6.2. Energıa cinetica rotacional. Momento de iner-
cia
Consideremos un solido rıgido rotando con velocidad angular ω, tal y como muestra
la figura.
i
z
x
y
ω
O
ri
vi
Su energıa cinetica se puede expresar como la suma de las energıas cineticas de
todos los puntos que lo componen:
Ec =n∑i
1
2miv
2i =
1
2
n∑i
mir2iω
2.
Como ω es igual para todos los puntos:
Ec =1
2
(∑i
mir2i
)ω2.

6.3. CALCULO DE MOMENTOS DE INERCIA 149
Si denominamos I a la magnitud∑i
mir2i , obtenemos una ecuacion para la energıa
cinetica de la rotacion similar a la de la traslacion:
Ec =1
2Iω2.
La magnitud I se denomina momento de inercia del sistema y como iremos compro-
bando en este tema constituye de algun modo, la magnitud equivalente en dinamica
de la rotacion a la masa en dinamica de la traslacion. Sus dimensiones y sus unidades
en el Sistema Internacional son:
[I] = ML2
S.I. → kg m2
Conviene resaltar que en esta definicion, las distancias que aparecen son las distan-
cias de cada masa del sistema al eje de giro (¡no al origen de coordenadas!), luego el
momento de inercia depende del eje de giro elegido. No es una propiedad inherente al
sistema, sino que tambien depende de cual es el eje de giro.
6.3. Calculo de momentos de inercia
6.3.1. Sistemas discretos
6.3.1 Ejemplo
Considerese la molecula de O2. Si la distancia media entre sus atomos es de 1,21 Ay
la masa de cada atomo es 2,77 × 10−26 kg, calculese su momento de inercia alrededor
de un eje que pasa por el centro de masas (considerando que los atomos son masas
puntuales).
d
O O
z
m m

150 CAPITULO 6. DINAMICA DE LA ROTACION
I =2∑i=1
mir2i = 2m
(d
2
)2
= 1,95× 10−46 kg m2.
6.3.2 Ejemplo
Calculese el momento de inercia de la siguiente distribucion de 8 masas identicas res-
pecto a los dos ejes que se muestran en la figura:
z
m
a
z
r
a
a
z
z
a) Un eje que pasa por el centro de masas de la distribucion.
b) Un eje que pasa por dos masas en el mismo lado.

6.3. CALCULO DE MOMENTOS DE INERCIA 151
a) En este caso la distancia de todas las masas al eje es a√
2/2.
I =8∑i=1
mir2i = 8m
(a
√2
2
)2
= 4ma2.
b) En este caso hay varios tipos de distancias al eje.
I =8∑i=1
mir2i = 0 + 0 + 4ma2 + 2m(
√2a)2 = 4ma2 + 4ma2 = 8ma2.
Luego I depende del eje considerado.
6.3.2. Sistemas continuos
En el caso de sistemas continuos el momento de inercia se define del siguiente modo:
I = lım∆m→0
∑r2dm =
∫r2dm.
Utilizando la definicion de densidad de masa se pueden presentar tres situaciones:
a) Sistemas tridimensionales (esferas, cilindros, conos, etc.):
ρ =dm
dV−→ I =
∫V
ρ(r)r2dV.
b) Sistemas bidimensionales (discos y superficies planas):
σ =dm
dS−→ I =
∫S
σ(r)r2dS.
c) Sistemas unidimensionales (varillas e hilos rectilıneos):
λ =dm
dx−→ I =
∫l
λ(r)r2dx.
En el caso de sistemas homogeneos, las densidades son constantes y salen fuera de la
integral correspondiente.

152 CAPITULO 6. DINAMICA DE LA ROTACION
6.3.3 Ejemplo
Calculese el momento de inercia de un anillo de masa M y radio R respecto a un eje
perpendicular al plano que lo contiene y que pasa por su centro.
z
x
dm
R
I =
∫r2dm = R2
∫dm = MR2.
En este caso, el momento de inercia es independiente de que el anillo sea homogeneo
o no (cosa que no ocurre, por ejemplo, cuando se calcula su centro de masas).
6.3.4 Ejemplo
Momento de inercia de un disco uniforme de masa M y radio R respecto a un eje
perpendicular al plano que lo contiene y pasa por su centro.
y
z
x
Rr
dm

6.3. CALCULO DE MOMENTOS DE INERCIA 153
Tomamos como elemento de masa dm un anillo situado entre r y r + dr. Su area
sera ds = 2πrdr.
dm = σds =M
�πR22�πrdr
I =
∫r2dm = 2
M
R2
∫ R
0
r3dr = 2MR4
4R2=
1
2MR2.
Este momento de inercia se puede aplicar a calcular el de un cilindro uniforme respecto
a su eje de simetrıa, sin mas que considerarlo como una superposicion de discos de
radios identicos
I =
∫dI =
∫1
2R2dm =
1
2MR2.
dI
R
dm
6.3.5 Ejemplo
Momento de inercia de una esfera uniforme respecto a un eje que pasa por su centro
en funcion de su masa M y de su radio R.

154 CAPITULO 6. DINAMICA DE LA ROTACION
dmy
R
y
z
x
r
La esfera se puede considerar como una superposicion de discos de radio variable
y espesor infinitesimal. El radio de cada uno vale: r2 = R2 − y2; y su volumen: dV =
πr2dx = π(R2−y2)dx. Y, por lo tanto, la masa infinitesimal de cada uno, dm = ρdV =
MVπ(R2 − y2)dy.
Momento de inercia de cada disco elemental:
dI =1
2r2dm =
1
2(R2 − y2)
M
Vπ(R2 − y2)dy =
πM
2V(R2 − y2)2dy
I = 2
∫ R
0
πM
2V(R2 − y2)2dy = π
M
V
∫ R
0
(R4 + y4 − 2R2y2)dy
= πM
V
(R5 +
R5
5− 2R2R
3
3
)= π
M
VR5
(1 +
1
5− 2
3
)=
8
15πM
VR5
Como V = (4/3)πR3:
I =8
15�π
M43πR3
R5 =2
5MR2
6.3.6 Ejemplo
Momento de inercia de una placa rectangular homogenea respecto a un eje perpendi-
cular que pasa por su centro de masas.

6.3. CALCULO DE MOMENTOS DE INERCIA 155
a
b
z
y
x
dm
I =
∫r2 dm =
∫r2σds.
{r2 = x2 + y2
ds = dx dy
I = σ
∫(x2 + y2) dxdy = σ
(∫x2 dxdy +
∫y2 dxdy
)=
= σ
(∫ b/2
−b/2dy
∫ a/2
−a/2x2 dx+
∫ a/2
−a/2dx
∫ b/2
−b/2y2 dy
)= σ
(bx3
3
]a/2−a/2
+ ay3
3
]b/2−b/2
)=
= σ
(b
32a3
4+a
32b3
4
)=M
ab
(ba3
12+ab3
12
)=M
12(a2 + b2).
La figura adjunta resume algunos otros momentos de inercia habituales (para ob-
jetos rıgidos y uniformes).

156 CAPITULO 6. DINAMICA DE LA ROTACION
I=MR2 I= MR
22_3
I= M (R +R )2
2_1
1
2
2
I= ML2_
3
1I= ML2_
121
I= M (a +b )2
12_1 2
Aro cilíndrico Cilindro hueco Cascarón esférico
Placa rectangular Varilla
R
R 1
R 2R
a
b
L
L
6.3.3. Teorema de los ejes paralelos (Steiner)
Como hemos visto, el momento de inercia de un cuerpo no es unico, sino que de-
pende del eje respecto al que se calcula. Esto hace muchas veces su calculo complicado.
Se ha de recurrir entonces a expresiones generales que relacionen el momento de iner-
cia respecto a dos ejes diferentes. Uno de los teoremas al respecto mas practicos es el
denominado de Steiner o de los ejes paralelos . Relaciona el momento de inercia res-
pecto a un eje que pasa por el centro de masas con el relativo a un eje paralelo. La

6.3. CALCULO DE MOMENTOS DE INERCIA 157
demostracion es sencilla a partir de la figura adjunta.
z
y
x
dm
c.m.
x
y
x cm
y cm
d
y'
r r'
O
x'
~r : (x, y) −→ coordenadas de dm respecto a O~r′ : (x′, y′) −→ coordenadas de dm respecto al c.m.~d : (xcm, ycm) −→ coordenadas del c.m. respecto a O
Vectorialmente, ~r = ~d + ~r′ y en coordenadas, (x, y) = (xcm, ycm) + (x′, y′). Respecto a
z:
I =
∫r2 dm =
∫(x2 + y2) dm =
∫ [(x′ + xcm)2 + (y′ + ycm)2
]dm =
=
∫(x′2 + y′2) dm︸ ︷︷ ︸
=Icm
+ 2xcm
∫x′ dm︸ ︷︷ ︸
=Mx′cm=0
+ 2ycm
∫y′ dm︸ ︷︷ ︸
=My′cm=0
+
∫(x2
cm + y2cm) dm︸ ︷︷ ︸
=(x2cm+y2
cm)∫dm=d2M
donde d es la distancia entre los ejes. En definitiva:
I = Icm + d2M.
6.3.7 Ejemplo
Como ejercicio es facil obtener la relacion entre el momento de inercia de una varilla
respecto a un eje perpendicular que pasa por su centro de masas, Icm = (1/12)ML2, y
a un eje perpendicular que pasar por uno de sus extremos, Icm = (1/3)ML2.

158 CAPITULO 6. DINAMICA DE LA ROTACION
6.3.4. Teorema de los ejes perpendiculares
Este teorema solo es valido para figuras planas. Relaciona los momentos de inercia
respecto a dos ejes perpendiculares contenidos en una figura plana con el momento de
inercia respecto a un tercer eje perpendicular a los dos anteriores.
z
y
x
x
y
dm
r
Iz =
∫r2 dm =
∫(x2 + y2) dm =
∫x2 dm+
∫y2 dm =⇒ Iz = Ix + Iy.
6.3.8 Ejemplo
Calcularemos el momento de inercia de un anillo respecto a un eje que contiene a uno
de sus diametros.
Consideremos que el anillo esta situado en el plano XY y el origen de coordenadas
en el centro del anillo. Por lo tanto el eje Z es perpendicular al plano del anillo y pasa
por su centro. Ya hemos obtenido anteriormente que Iz = mr2.
Por simetrıa, Iy = Ix −→ Ix = Ix + Iy = 2Ix −→ Ix =1
2mr2 = Iy.
6.4. Momento angular
El analogo rotacional del momento lineal o cantidad de movimiento de una partıcula
es una nueva magnitud fısica denominada momento angular . Se define el momento

6.4. MOMENTO ANGULAR 159
angular de una partıcula en un instante determinado y respecto a un cierto origen de
coordenadas O como:
~= ~r × ~p,
donde ~r es el vector de posicion de la partıcula respecto a ese origen y ~p es su momento
lineal en ese instante. Con esta definicion vemos que ~ es una magnitud vectorial,
perpendicular tanto a ~r como a ~p.
Dimensiones: [`] = LMLT−1 = ML2T−1; Unidades S.I.: kg.m2/s.
Conviene recalcar que la definicion de esta nueva magnitud depende del origen de
coordenadas elegido, por lo que siempre que se hable de momento angular debe quedar
claro a que sistema de coordenadas nos referimos.
6.4.1 Ejemplo
Partıcula describiendo una circunferencia.
z
O
ω
l
r
p
~= `~k −→ ` = rmv sen(π
2
)= rmv = r2mω.
Si ω es constante, ` tambien lo es.

160 CAPITULO 6. DINAMICA DE LA ROTACION
6.4.2 Ejemplo
Partıcula moviendose en lınea recta.
y
z
x
r
l
r
p
θ
O
~= − ~j −→ ` = rmv sen θ = mvr⊥.
Unicamente si el origen esta en la trayectoria de la partıcula, ~ valdra cero. Si la
velocidad es constante, ~ sera constante, pero si la partıcula esta acelerada, ~ varıa en
el tiempo.
6.5. Segunda Ley de Newton para la rotacion
6.5.1. Partıcula unica
En el caso del movimiento de traslacion, comprobamos como la derivada temporal
del momento lineal esta relacionada con las fuerzas exteriores que actuan sobre cierta
partıcula. De hecho, esta es una expresion alternativa de la ecuacion newtoniana del
movimiento de la partıcula. Veremos a continuacion que informacion esta contenida en
la derivada del momento angular. Consideremos una unica partıcula:
d~
dt=d(~r × ~p)
dt=����>
0d~r
dt× ~p+ ~r × d~p
dt= ~r × d~p
dt
d~p
dt= ~f =⇒ d~
dt= ~r × ~f = ~τ .

6.5. SEGUNDA LEY DE NEWTON PARA LA ROTACION 161
Esta ultima ecuacion constituye la segunda ley de Newton para la rotacion. La variacion
del momento angular con el tiempo es el momento neto de las fuerzas que actuan sobre
la partıcula. Veamos intuitivamente que significa esto con un ejemplo.
6.5.1 Ejemplo
Consideremos una puerta vista desde arriba y que pretendemos abrirla ejerciendo una
fuerza sobre ella.
La experiencia nos dice que la aceleracion con que conseguimos abrirla no solo
depende de la magnitud de la fuerza aplicada, sino tambien de su direccion y punto de
aplicacion. La fuerza ~f3 no consigue abrirla, la ~f2 sı, pero ’despacio’. Y la ~f1 consigue
abrirla con mas facilidad. Repitiendo la experiencia sistematicamente se comprueba que
la aceleracion angular con que se abre la puerta es proporcional, no solo a la magnitud
de la fuerza aplicada, sino tambien a la distancia de la lınea de accion de la fuerza al eje
de giro. Esta distancia se denomina brazo de palanca. Entonces α ∝ fr⊥ = fr sen θ.
f 1
f 2
f 3
f
r
r
θf
Se define el modulo del momento asociado a la fuerza ~f como: τ = fr sen θ. Y, por
lo tanto, experimentalmente se comprueba que,
α ∝ τ −→ segunda ley de Newton para la rotacion

162 CAPITULO 6. DINAMICA DE LA ROTACION
La relacion matematica rigurosa entre ambas magnitudes la obtenemos a partir del
concepto de momento angular.
Como en la obtencion de esta segunda ley para la rotacion, hemos aplicado la
correspondiente a la traslacion, que solo es valida en sistemas de referencia inerciales,
el resultado obtenido es tambien unicamente valido en estos sistemas de referencia. Esta
ley constituye la analogıa rotacional de la segunda ley de Newton que ya conocıamos
para la traslacion.
6.5.2. Sistemas de partıculas
Se define el momento angular total de un sistema de partıculas como la suma de
los momentos individuales de cada una:
~L =n∑i=1
~i
d~L
dt=
n∑i=1
d~idt
=n∑i=1
~ri × ~fi = ~τt,
donde ~τt representa el momento de fuerzas total sobre el sistema, que se puede des-
componer en un momento asociado a fuerzas internas al sistema y otro a externas.
~τt = ~τint + ~τext.
Es facil darse cuenta de que ~τint = 0. Por ejemplo, para un sistema de dos partıculas:
r
fij
rj
ri
fji
θi
θj
i
j
O

6.5. SEGUNDA LEY DE NEWTON PARA LA ROTACION 163
−~fij = ~fji −→ fij = fji
Si el eje perpendicular al papel es el z:
~τint = rifij sen θi ~k − rjfij sen θj ~k = fij(ri sen θi − rj sen θj)~k = fij(r⊥ − r⊥)~k = 0
La demostracion para un numero arbitrario de partıculas sera analoga. Por lo tanto,
queda demostrado que:
d~L
dt= ~τext
Esta es la expresion de la segunda ley de Newton para la rotacion aplicada a un sistema
de partıculas.
No lo demostraremos aquı, pero esta ecuacion no solo es valida en cualquier sistema
de referencia inercial, sino que tambien lo es siempre respecto al sistema de referencia
de centro de masas del sistema, aunque este acelerado. Es por esto que siempre se puede
descomponer el movimiento de un cuerpo extenso en traslacion del centro de masas y
rotacion respecto a el. En el primer caso se elige un sistema de referencia inercial y
se aplica la segunda ley de Newton respecto a el. Para la rotacion se considera como
sistema de referencia el centro de masas y se aplica la segunda ley de Newton para la
rotacion respecto a el.
Trataremos ahora de expresar la segunda ley de Newton para la rotacion de modo
analogo a la ecuacion, ~f = m~a. Consideremos un solido rıgido rotando alrededor del
eje z y tomemos como origen un punto cualquiera del eje.

164 CAPITULO 6. DINAMICA DE LA ROTACION
i
z
x
y
ω
O
R i ri
pi
z
plano xy
i
ri
R i
liθi
θi
liz
`i = ripi sen(π
2
)= rimivi = riRimiω
Componente z de li:
`iz = riRimiω sen θi y como: ri sen θi = Ri =⇒ `iz = R2imiω.
Sumando para todas las partıculas que forman el objeto:
Lz =n∑i=1
`iz =
(n∑i=1
miR2i
)ω = Iω.
Luego para todo solido rıgido, la componente sobre el eje de rotacion del momento
angular verifica una ecuacion similar a p = mv. Aunque no lo demostraremos, se puede
comprobar que para cualquier solido rıgido con simetrıa axial :
~L = I ~ω,
es decir, que ~L esta dirigido en la direccion de ~ω. Pero esto no es cierto para cualquier
solido rıgido.
En resumen,
+ Para un solido rıgido (I = cte.) cualquiera:
dLzdt
= Idω
dt= Iα −→ τz = Iα
donde τz es la componente z de ~τext.

6.6. CONSERVACION DEL MOMENTO ANGULAR Y SUS APLICACIONES 165
+ Si ademas de ser rıgido tiene simetrıa de revolucion:
d~L
dt= I
d~ω
dt= I~α −→ ~τext = I~α
Estas expresiones constituyen la analogıa rotacional ded~p
dt= m~a para la segunda ley
de Newton en movimientos lineales. De otro modo:d~L
dt= ~τext = I~α.
6.6. Conservacion del momento angular y sus apli-
caciones
Hasta aquı hemos introducido dos principios de conservacion basicos en Mecanica
Clasica, el de conservacion de la energıa y el de conservacion del momento lineal de
un sistema. Ademas de su gran importancia teorica, ambos permiten resolver gran
cantidad de problemas practicos. Presentaremos ahora otro principio de conservacion
de gran trascendencia y lo aplicaremos a la resolucion de ciertos problemas interesantes.
Cuando el momento de la fuerzas externas que actuan sobre un sistema se anula,
se verifica que:
~τext = 0 =⇒ ~L = ~cte. =⇒ ~Li = ~Lf .
Esto quiere decir que para un sistema en el que ~τext = 0, el momento angular total
es constante. Esto no significa que el momento angular de cada una de las partıculas
que forman el sistema permanezca constante, sino solamente que la suma de todos
ellos sı que lo es. Ademas, este principio de conservacion solo es cierto punto a punto.
Unicamente si ~τext respecto a un cierto punto es nulo, entonces el momento angular
total, ~L, respecto a ese punto es invariante. Respecto a otro punto cualquiera esto no
tiene porque verificarse.
i) Regresemos a la ecuacion Lz = Iω, valida para sistemas de geometrıa arbitraria.
Si el sistema es un solido rıgido, I = cte., pero existen ciertos problemas donde el
momento de inercia del sistema varıa. En este casodI
dt6= 0 y para conservarse el
momento angular (si no existen momentos externos) debe cumplirse:
Li = Lf =⇒ Iiωi = Ifωf

166 CAPITULO 6. DINAMICA DE LA ROTACION
Esto implica una variacion de la velocidad angular del sistema. En resumen, la
conservacion del momento angular da lugar a una variacion de la velocidad angular
del sistema si el momento de inercia cambia.
6.6.1 Ejemplo
Una persona esta sentada sobre un taburete y gira respecto a un eje vertical con
una velocidad angular ωi mientras sostiene dos pesas con sus brazos extendidos.
Repentinamente encoge sus brazos de modo que If = Ii/3. Calculese la velocidad
angular una vez encogidos los brazos. ¿Que relacion hay entre la energıa cinetica
de rotacion inicial y final?
Iiωi = Ifωf =Ii3ωf −→ ωf = 3ωi
Kf =1
2Ifω
2f =
1
2
(Ii3
)(3ωi)
2 = 3
(Ii2ω2i
)= 3Ki.
ii) Fuerzas centrales y conservacion del momento angular
La conservacion del momento angular es basica en el estudio de movimientos
planetarios y otro tipo de problemas gravitatorios. La fuerza gravitatoria es un
ejemplo tıpico de fuerza central , es decir, es una fuerza que solo depende de la
distancia de los objetos que interaccionan.
6.6.2 Ejemplo
Supongamos, por ejemplo, un planeta en orbita elıptica alrededor del sol.
Sol
Planeta
P A
vA
vP
f
v θ
r

6.7. TRABAJO DE ROTACION. TEOREMA TRABAJO-ENERGIA 167
El momento de la fuerza gravitatoria que actua sobre el planeta es cero respecto
al Sol, porque ~r y ~f son colineales. Por lo tanto, si despreciamos otras fuerzas, el
momento angular del planeta respecto al Sol permanece constante.
~L = ~r × ~p = ~cte. −→ mvr sen θ = cte.
Todas las magnitudes que aparecen en esa ecuacion varıan durante el movimiento
orbital, pero su producto permanece constante. Ası por ejemplo, veremos que pasa
en la posicion mas proxima al Sol ( perihelio) y en la mas alejada ( afelio). En
estas posiciones,
θ = π/2 → sen θ = 1 =⇒ vArA = vP rP
Como rA > rP , entonces vA < vP . Es decir, que la velocidad del planeta en su
orbita va cambiando con el tiempo, aumentando en el camino A→ P , y disminu-
yendo en el inverso. En general, para cualquier fuerza central, el momento angular
se mantiene constante respecto al centro de fuerzas.
6.7. Trabajo de rotacion. Teorema trabajo-energıa
Supongamos como ejemplo una puerta que puede girar sobre sus bisagras.
dθ
z
ds
fft
R
α
Cuando se abre o cierra, se efectua un trabajo. Si la fuerza aplicada es ~f , la unica
componente relevante para obtener el trabajo es la tangente al movimiento, ~ft.
dW = ~f.d~s = f cosαds = ftds,

168 CAPITULO 6. DINAMICA DE LA ROTACION
y como ds = Rdθ, entonces:
dW = ftRdθ.
Por otra parte, ~τ = ~R× ~f , y considerando que el eje de giro es z,
τz = Rf sen(π
2− α
)= Rf cosα = Rft −→ dW = τz dθ.
En un proceso finito:
W =
∫ θf
θi
τzdθ,
ecuacion que constituye la definicion general de trabajo de rotacion.
Demostraremos ahora el teorema trabajo-energıa a partir de esa expresion para el
trabajo.
τz = Iα −→ dW = Iα dθ = Idω
dtω dt
ωdω
dt=
d
dt
(1
2ω2
)−→ dW = I
d
dt
(1
2ω2
)dt −→ W =
∫ f
i
I
2d(ω2)
=⇒ W =1
2I(ω2
f − ω2i ) = ∆Ec.
Luego el trabajo realizado coincide con la variacion de la energıa cinetica de rotacion.
Por ultimo, se puede tambien definir una potencia de rotacion como:
P =dW
dt= τz
dθ
dt= τzω.
Esta ecuacion tambien es analoga a la correspondiente para la traslacion.
6.8. Analogıas entre las ecuaciones de la traslacion
y la rotacion
A modo de apendice, resumimos en la siguiente tabla el paralelismo entre las ecua-
ciones que hemos obtenido en los casos traslacional y rotacional.

6.8. ANALOGIAS. . . 169
Traslacion Rotacion
m I
~p = m~v Lz = Iω
(simetrıa axial → ~L = I~ω)
~f ~τ
~f =d~p
dt= m~a τz =
dLzdt
= Iα
(simetrıa axial → ~τ =d~L
dt= I~α)
Ec = 12mv2 Ec = 1
2I ω2
dW = ~f.d~s dW = τz dθ
P = ~f.~v P = τz ω
W =1
2m(v2
f − v2i ) W =
1
2I(ω2
f − ω2i )


6.9. PROBLEMAS 171
6.9. Problemas
1. Se sujeta un cuerpo de masa m a una cuerda enrollada alrededor de una rueda
de momento de inercia I y radio R. La rueda puede girar sin rozamiento y la
cuerda no se desliza en su borde. Halla la tension de la cuerda y la aceleracion
del cuerpo.
(Respuestas : T =mgI
mR2 + I; a = g
mR2
mR2 + I)
2. Determina la aceleracion de la cuerda del problema anterior aplicando el concepto
de momento angular y la segunda ley de Newton para la rotacion.
3. Un disco de momento de inercia I1 esta girando con velocidad angular ωi alrededor
de un eje sin rozamiento. En un cierto instante cae sobre otro disco con momento
de inercia I2 inicialmente en reposo sobre el mismo eje. Debido al rozamiento
entre ellos, los dos bloques adquieren una velocidad angular comun, ωf . ¿Cual es
esta velocidad final comun?
(Respuestas : ωf =I1
I1 + I2
ωi)
4. Un muchacho de masa, m, se acerca corriendo con una velocidad, v, a un tiovivo
de feria, que esta inicialmente parado, y se sube de un salto a su borde. ¿Que ve-
locidad angular adquiere el tiovivo cuando el muchacho ha subido y se encuentra
en reposo relativo respecto a el?
(Respuestas : ω =mvR
I +mR2)
5. Dos masas, m1 y m2, estan conectadas a traves de una cuerda que pasa por dos
poleas identicas de momento de inercia, I. Encuentrese la aceleracion de cada
masa y las tensiones en la cuerda.
(Respuestas : a =(m2 −m1)g
2IR2 +m1 +m2
; T1 = m1(a + g); T2 =aI
R2+ T1; T3 =
m2(g − a))
6. Una barra uniforme de longitud L y masa M puede girar libremente sobre un
pivote sin friccion que pasa por uno de sus extremos. La barra se encuentra
inicialmente en reposo y en posicion horizontal.

172 CAPITULO 6. DINAMICA DE LA ROTACION
a) Calcula la velocidad angular de la barra cuando pasa por su posicion mas baja.
b) Determina la velocidad lineal del centro de masas de la barra y la velocidad
lineal del punto mas bajo de la barra en la posicion vertical.
(Respuestas : a) ω =
(3g
L
)1/2
; b) v = (3Lg)1/2)
7. Considerense dos masas (m1 ym2) conectadas por medio de una polea con radioR
y momento de inercia I respecto a su eje de rotacion. Si la cuerda no resbala sobre
la polea y el sistema se libera a partir del reposo, determınense las velocidades
lineales de las masas despues de que m2 haya caıdo una distancia h. ¿Cual es la
velocidad angular de la polea en ese instante?
(Respuestas : ω =1
R
[2(m2 −m1)gh
m1 +m2 + IR2
]1/2
)
8. El rotor de un motor electrico tiene un momento de inercia de 0,85 kg.m2 y gira
inicialmente a 1670 rev/min. Calculese el momento de la fuerza necesaria para
pararlo en 1,5 min.
(Respuestas : τ = 1,65 Nm)
9. ¿Cual es la mınima velocidad que tiene que llevar un proyectil, de masa m, para
que al chocar e incrustarse en el extremo inferior de una barra homogenea de
longitud l y masa M que se encuentra atravesada en el otro extremo por un eje,
de una vuelta completa alrededor de dicho eje despues del impacto?
(Respuestas : v = l
(M
3m+ 1
)(6g(M + 2m)
l(M + 3m)
)1/2
)
10. Dos objetos (A y B) estan conectados a traves de dos poleas (C y D) de radios:
RC = 8 cm y RD = 15 cm. Las masas de los objetos son mA = 27 kg y mB = 16
kg. Si la masa de la polea C es mC = 8 kg, calcular:
a) la masa mD para que la pesa B se mueva con una aceleracion de 2 m/s2 hacia
arriba.
b) las tensiones en el cable.

6.9. PROBLEMAS 173
(Respuestas : a) mD = 13,8 kg; b) T1 = 210,6 N; T2 = 202,6 N; T3 = 188,8
N)
11. A una partıcula de masa 1 kg que se encuentra inicialmente en el punto A =
(1, 2, 1) y que posee una velocidad ~v0 = 3~i − 2~j + ~k (m/s) se le aplica una
fuerza tal que su momento respecto al origen permanece constante y de valor
~τ = 3~i − 4~j + 2~k (N.m). Calcula el momento angular de la partıcula al cabo de
3 s.
(Respuestas : ~L = 13~i− 10~j − 2~k)
12. Calcula el momento de inercia de un cono recto respecto a su eje de simetrıa.
(Respuestas : I =3
10MR2)
13. Estima el momento angular de la Tierra en su movimiento alrededor del sol y el de
un electron alrededor de nucleo en un atomo de H2. En ambos casos, supongase,
por simplicidad, que las orbitas son circulares. Datos:
mT = 5,98× 1024 kg (masa de la Tierra)
dS = 1,49× 1011 m (distancia media al Sol)
me = 9,11× 10−31 kg (masa del e−)
dn = 5,29× 10−11 m (distancia media del e− al nucleo)
we = 4,13× 1016 rad/s (velocidad angular del e−)
(Respuestas : LT = 2,67× 1040 m2kg s−1; le = 1,05× 10−34 m2kg s−1)
14. Calcula el momento de inercia de una placa rectangular homogenea de masa M
y lados a y b.
(Respuestas : I =m
12(a2 + b2))
15. Una esfera, un cilindro y un aro, todos del mismo radio, ruedan hacia abajo
sobre un plano inclinado partiendo de una altura y0. Encuentrese en cada caso la
velocidad con la que llegan a la base del plano.
(Respuestas : v2e =
10
7g(y0 − y); v2
d =4
3g(y0 − y); v2
a = g(y0 − y))
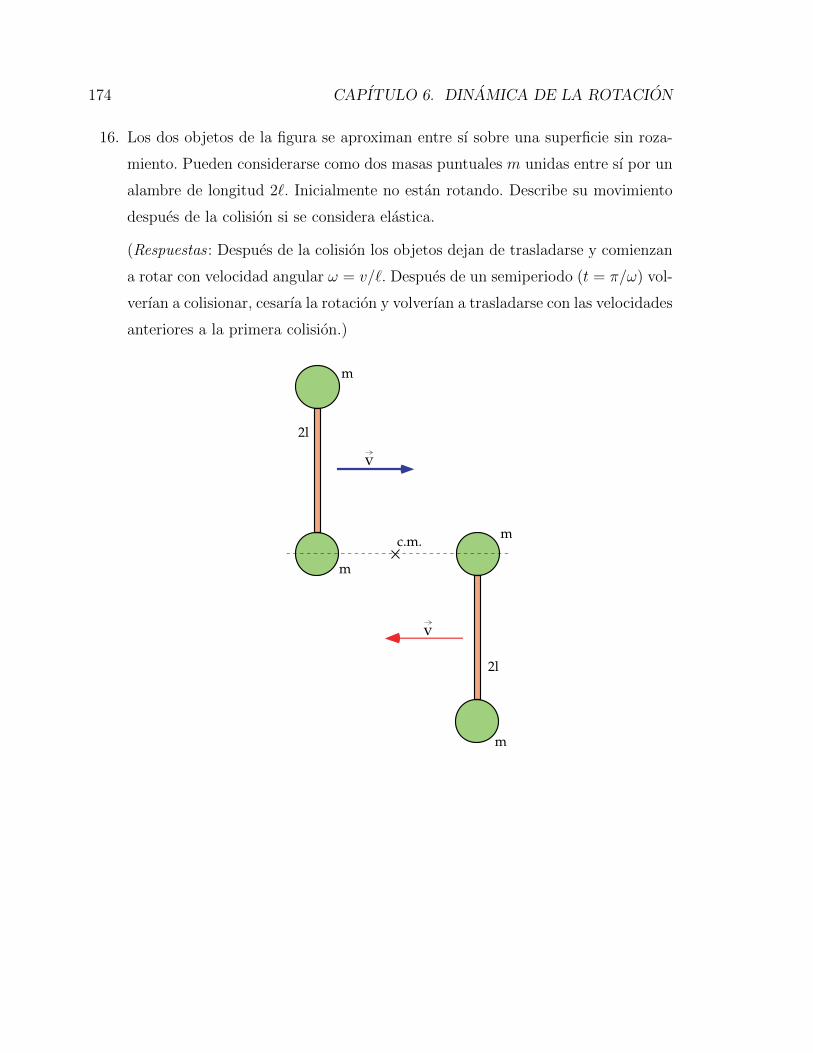
174 CAPITULO 6. DINAMICA DE LA ROTACION
16. Los dos objetos de la figura se aproximan entre sı sobre una superficie sin roza-
miento. Pueden considerarse como dos masas puntuales m unidas entre sı por un
alambre de longitud 2`. Inicialmente no estan rotando. Describe su movimiento
despues de la colision si se considera elastica.
(Respuestas : Despues de la colision los objetos dejan de trasladarse y comienzan
a rotar con velocidad angular ω = v/`. Despues de un semiperiodo (t = π/ω) vol-
verıan a colisionar, cesarıa la rotacion y volverıan a trasladarse con las velocidades
anteriores a la primera colision.)
m
m
m
m
2l
2l
v
v
c.m.
Capıtulo 7
Propiedades elasticas de losmateriales. Mecanica de Fluidos
7.1. Propiedades elasticas de los materiales
7.1.1. Curvas esfuerzo-deformacion
Hemos definido anteriormente un solido rıgido como aquel cuerpo en que la dis-
tancia entre sus puntos es constante. Dicho de otro modo, es un material que no se
deforma. Pero, en realidad, cuando sobre un material se aplica una fuerza este se de-
forma 1. La deformacion depende del tipo de material (propiedades microscopicas), de
la fuerza aplicada (modulo, direccion, tiempo de aplicacion, . . . ) y de las condiciones
termodinamicas (temperatura, presion, . . . ).
1Por ejemplo, en Geologıa el conocimiento de la estructura y naturaleza del interior de la Tierrase ha obtenido en gran medida a partir de las ondas sısmicas que se generan en los terremotos. Estosocurren cuando las fuerzas tectonicas superan las fuerzas maximas que pueden soportar los materialesque las forman y tiene lugar una fractura. Desde ese punto se propagan ondas sısmicas alejandosedel epicentro. Esta propagacion esta ıntimamente ligada tambien a las propiedades elasticas de losmateriales que forman la corteza y las relaciones entre tensiones y deformaciones en ellos

176 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
l0
∆l
A
f
Consideremos como ejemplo una varilla de un cierto material sobre la que aplicamos
una fuerza ~f . Si A es la seccion, se denominan:
esfuerzo −→ σ =f
A; deformacion −→ ε =
∆`
`0
donde `0 es la longitud de la varilla en ausencia de tension.
La experiencia en los laboratorios dice que si la fuerza aplicada no es muy grande,
la relacion entre σ y ε es aproximadamente lineal y que, al cesar la fuerza, la varilla
recupera la longitud inicial. Es decir,
f ' k∆`.
Se dice que el comportamiento del material es lineal y esa relacion es la ley de Hooke
(formalmente analoga a la que relaciona fuerza y elongacion en un muelle).
Pero al seguir aumentando la fuerza sobre el material llega un momento en que
esa relacion lineal deja de ser valida. Si el material recupera su longitud inicial al
cesar la fuerza, sigue siendo elastico pero no lineal. Aumentando aun mas f , llega un
momento en que el material no recupera `0 cuando f = 0. Se dice que el material ha
sobrepasado su lımite elastico y entra en la zona plastica. Aumentando aun mas la
fuerza llega un momento en que el material se fractura. El punto en que eso sucede
se llama punto de ruptura o fractura. El tamano y la localizacion de estas regiones

7.1. PROPIEDADES ELASTICAS DE LOS MATERIALES 177
depende del tipo de material, pero cualitativamente el comportamiento es similar para
todos los materiales. Se puede esquematizar en una curva σ−ε, que se denomina curva
esfuerzo-deformacion.
régimen elástico r. plástico
zona lineal
límite
elástico
punto de
ruptura
σ
ε
Normalmente, en la vida cotidiana, se emplea el termino elastico cuando la zona
que abarca su regimen elastico es amplia y es plastico cuando, incluso para fuerzas no
muy grandes, queda deformado permanentemente al cesar la accion.
σ
ε
σ
ε
material elástico material plástico
zona elástica
zona plástica
Cuando sobre un material esta actuando una fuerza y se elimina progresivamente,
la curva esfuerzo-deformacion, (recorrida en el sentido en que σ disminuye) no pasa
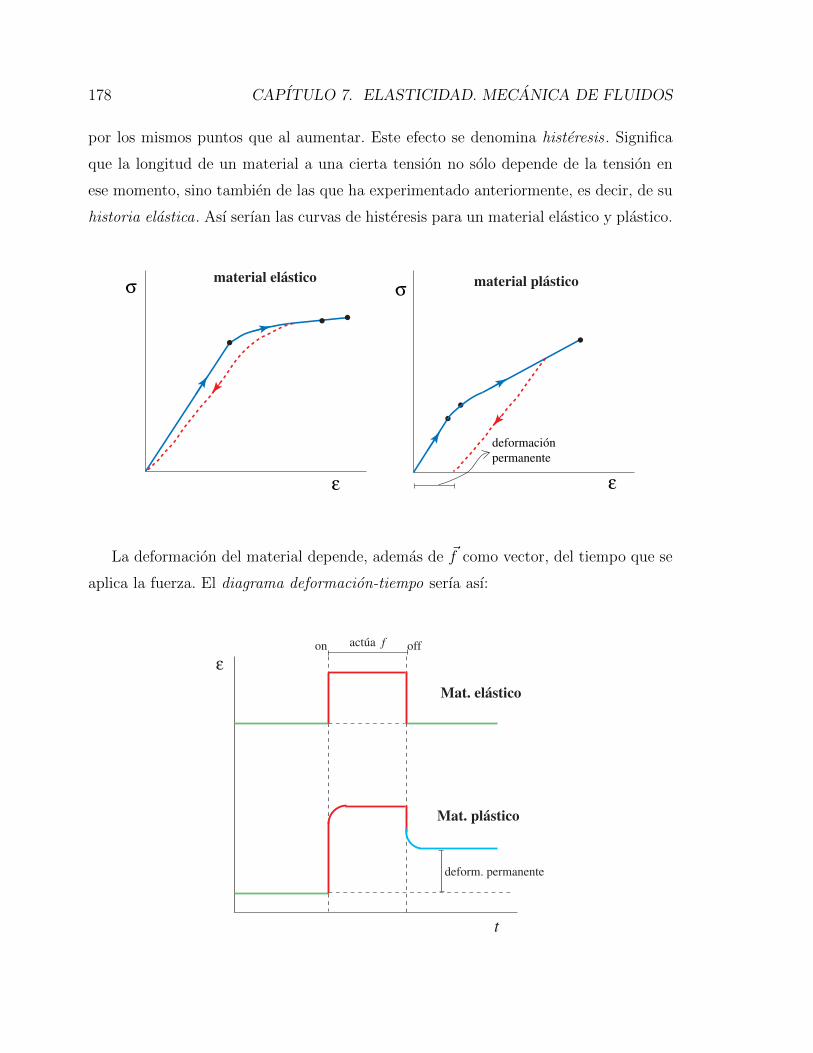
178 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
por los mismos puntos que al aumentar. Este efecto se denomina histeresis . Significa
que la longitud de un material a una cierta tension no solo depende de la tension en
ese momento, sino tambien de las que ha experimentado anteriormente, es decir, de su
historia elastica. Ası serıan las curvas de histeresis para un material elastico y plastico.
σ
ε
σ
ε
deformación
permanente
material elástico material plástico
La deformacion del material depende, ademas de ~f como vector, del tiempo que se
aplica la fuerza. El diagrama deformacion-tiempo serıa ası:
ε
t
actúa fon off
Mat. elástico
Mat. plástico
deform. permanente

7.1. PROPIEDADES ELASTICAS DE LOS MATERIALES 179
7.1.2. Materiales elasticos
Estudiaremos mas detalladamente la relacion entre la tension y la deformacion de
un material tıpicamente elastico como puede ser una goma de caucho. A tensiones bajas
el material se comporta linealmente y verifica la ley de Hooke: f = k∆`, donde k es la
constante de Hooke correspondiente que depende de las caracterısticas microscopicas
del material, de `0 y de la temperatura. En el resto de la zona elastica donde el material
se aleja del comportamiento lineal, una buena aproximacion a la curva, f = f(`), viene
dada por la denominada ley de Kuhn:
f = A
(`
`0
− `20
`2
)
donde A es una constante caracterıstica del material. En terminos de la deformacion
relativa
ε = ∆`/`0 −→ `/`0 = ε+ 1 =⇒ f = A
[1 + ε− 1
(1 + ε)2
].
La ley de Hooke se puede recuperar como un desarrollo en serie de esta ecuacion para
deformaciones pequenas. En general,
1
(1 + x)2' 1− 2x+ 3x2 + . . .
Truncando el desarrollo a primer orden:
f ' A [1 + ε− (1− 2ε)] = 3Aε = 3A`− `0
`0
. (7.1)
Luego comparando con la ley de Hooke, k = 3A/`0.

180 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
lím
ite l
ineal
Kuhnf
∆l
7.1.3. Constantes elasticas
Se denomina ası a los diferentes parametros que caracterizan el comportamiento
elastico de un material en funcion del tipo de esfuerzo aplicado.
a) Modulo de Young (Y).
Y ≡ σ
εS.I. −→ N/m2 ≡ Pa
Esta unidad, el Pascal, como veremos un poco mas adelante es la unidad de presion
en el S.I. Mide el comportamiento del material sometido a una fuerza de traccion
(estiramiento) o compresion. Para un material que obedece la ley de Kuhn: Y =
3A/S (ver Eq. (7.1)). Por ejemplo, para una goma de caucho, Y ' 1×106−2×106
Pa.
b) Modulo de cizalladura (C). Otro tipo de elasticidad proviene del caso en que una
de las caras del cuerpo permanezca en posicion fija y actue una fuerza tangencial
sobre la opuesta tal y como se muestra en el siguiente esquema.

7.1. PROPIEDADES ELASTICAS DE LOS MATERIALES 181
f
A
∆x
h
Este tipo de deformacion se denomina cizalladura y en ella no tiene lugar cambio
de volumen del sistema.
C ≡ f/A
∆x/hS.I. −→ N/m2 = Pa.
c) Modulo de compresibilidad (k).
Otro tipo de deformacion es el experimentado cuando sobre cada uno de los puntos
de las caras exteriores de un objeto actua una misma fuerza en modulo. O sea, un
sistema sometido a una presion uniforme. En este caso se produce un cambio de
volumen, pero no un cambio en la forma.
V
V0
∆P

182 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
Se define la compresibilidad como la variacion de la presion respecto a la variacion
del volumen del sistema.
k = − ∆P
∆V/V0
; S.I. −→ N/m2 = Pa.
Se introduce un signo negativo en la definicion para que sea un numero positivo:
∆P > 0 −→ ∆V < 0 −→ k > 0
∆P < 0 −→ ∆V > 0 −→ k > 0
En la siguiente tabla representamos valores numericos concretos para los modulos que
hemos definido. Notese que los lıquidos no tienen ni modulo de Young ni cizalladura,
porque son fluidos.
Material Y (N/m2) C (N/m2) k (N/m2)
Aluminio 7× 1010 2,5× 1010 7× 1010
Cobre 11× 1010 4,2× 1010 14× 1010
Acero 11× 2010 8,4× 1010 16× 1010
Tungsteno 35× 1010 14× 1010 20× 1010
Vidrio 6,5− 7,8× 1010 2,6− 3,2× 1010 5,0− 5,5× 1010
Agua − − 0,21× 1010
Mercurio − − 2,8× 1010
7.2. Estados de la materia
Normalmente, la materia se clasifica segun tres tipos de estados: solido, lıquido y
gaseoso, aunque en ciertas condiciones muy especiales se puede hablar de un cuarto
estado de la materia, el plasma.
Las diferencias entre unos estados y otros se pueden entender a varios niveles:
A nivel macroscopico, los solidos tienen forma y volumen definidos. Sin embar-
go, los fluidos en general no tienen forma definida. Dentro de ellos, los lıquidos

7.2. ESTADOS DE LA MATERIA 183
sı tienen un volumen concreto (en el sentido de que su compresibilidad es pe-
quena), pero los gases, debido a su alta compresibilidad ni siquiera tienen un
valor definido, sino que ocupan por completo el volumen donde esten confinados.
A nivel microscopico, los solidos estan formados por atomos o moleculas que
ocupan puntos fijos del espacio, no se trasladan, aunque sı pueden vibrar. Las
moleculas que forman lıquidos y gases se mueven mas o menos libremente por el
espacio.
Atendiendo a la forma en que estan dispuestos los atomos en un solido, estos
se dividen en amorfos y cristalinos. En estos ultimos, los atomos se distribuyen
de forma ordenada sobre una red en el espacio. Por contra, los amorfos estan
formados por atomos distribuidos de forma irregular.
La distribucion espacial de las moleculas que componen la materia se debe a la
relacion entre las energıas cinetica y potencial a nivel microscopico.
Solidos: U >> K −→ Orden superior a la agitacion termica.
Lıquidos: U ∼ K −→ Interacciones similares al desorden termico.
Orden a corto alcance
Gases: U << K −→ Agitacion termica mucho mayor
que la intensidad de las interacciones.
Solidos: U >> K porque
{Distancia entre moleculas pequena.
Existen a temperaturas no muy altas.
Lıquidos: U ∼ K porque
{Existen en condiciones donde
la temperatura da lugar a U ∼ K.
Gases: U << K porque
{Las moleculas estan muy separadas.
Existen a altas temperaturas.
Cualquier material puede adoptar uno u otro estado de la materia dependiendo de
las condiciones termodinamicas.Solidos: T ↓↓, P ↑↑Lıquidos: Estados intermedios
Gases : T ↑↑, P ↓↓

184 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
El cuarto estado de la materia, el plasma, ocurre cuando esta se calienta a tempe-
raturas muy altas, por ejemplo, dentro de las estrellas. Lo que sucede es que la energıa
termica es tan grande que algunos electrones que rodean al nucleo para formar el ato-
mo se desprenden y se mueven libremente por todo el material. Entonces el sistema
se compone de iones cargados electricamente y electrones, tambien cargados, y que se
mueven por todo el espacio entre los iones.
Cada estado de la materia se estudia en Fısica con determinado formalismo ma-
tematico y con ciertos modelos especıficos. Pero al nivel mas sencillo se puede dar
una descripcion realista de los distintos estados utilizando simplemente las leyes de la
Mecanica Clasica que ya hemos estudiado.
7.3. Fluidos en reposo
7.3.1. Presion en un fluido
En general, se define la presion como la fuerza por unidad de area que se ejerce
sobre un cierto sistema. Esta presion puede ser igual en todos los puntos del sistema,
pero hay ciertos casos donde la presion puede variar en las distintas partes del sistema.
En este caso, se puede definir la presion localmente como:
P = lım∆A→0
∆f
∆A=
df
dA.
Esta es la definicion mas general de presion. Si fuese independiente del punto del sistema
considerado, serıa simplemente P = f/A.
Dimensiones de P :
[P ] =[f ]
[A]=MLT−2
L2= ML−1T−2.
Unidades :
• S.I. −→ N/m2 = Pa
• mmHg −→ 760 mmHg = 1 atm
• atm −→ 1 atm = 1, 013× 105 Pa

7.3. FLUIDOS EN REPOSO 185
• bares −→ 1 atm = 1013 mb
Llamaremos fluido compresible a aquel cuya densidad en un recipiente depende de
la profundidad a que nos encontremos. Es decir, la compresibilidad es tal que el peso
de la columna del propio fluido a una cierta profundidad hace que el volumen de una
determinada masa cambie con la altura de esa columna. Fluido incompresible es aquel
cuya densidad es constante, independiente de la profundidad.
7.3.2. Variacion de la presion con la altura en un fluido in-compresible
En un fluido cualquiera en reposo, la presion depende de la profundidad. Esta
variacion de presion se debe a la fuerza gravitatoria que experimentan las partıculas
del fluido, o dicho de otra manera, al peso del fluido que se encuentra por encima.
PA
(P+dP)Ay1
y2
P1
P2
h
dy
y
Consideremos una porcion de fluido (marcada en lınea discontinua en la figura)
contenida en un cilindro imaginario de seccion A y altura dy.
Fuerza hacia arriba sobre el fondo del cilindro: PA.
Fuerza hacia abajo en la parte superior: (P + dP )A.
Peso del fluido contenido en el cilindro: dW = ρgdV = ρgAdy, donde ρ es la
densidad del fluido.

186 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
Como el cilindro esta en equilibrio, la suma de las fuerzas que actuan sobre el debe
ser cero.
∑fy = PA− (P + dP )A− ρgAdy = 0 =⇒ dP
dy= −ρg.
Esta variacion de presion esta asociada a la diferencia de peso que soportan las caras
superior e inferior del cilindro y debe existir para que el fluido este en equilibrio. El
signo negativo significa que la presion disminuye al aumentar la altura, puesto que ρ y
g son siempre positivos.
dP = −ρgdy −→∫ P2
P1
dP = −∫ y2
y1
ρg dy.
Haciendo aquı la hipotesis de que el fluido es incompresible, ρ 6= ρ(y) o ρ 6= ρ(P ), y
puede considerarse constante al integrar:
=⇒ P2 − P1 = ρg(y1 − y2).
Normalmente, se considera que el recipiente que contiene el fluido esta abierto por la
parte superior a la atmosfera y se toma el origen de alturas en la cara en contacto con
ella. En ese caso: y1 −→ 0
y2 −→ −hP1 −→ P0
donde P0 es la presion atmosferica y entonces la presion, P , a una profundidad h viene
dada por:
P = P0 + ρgh.
Dos consecuencias importantes de esta ecuacion son:
a) Dos puntos del fluido a la misma profundidad tienen la misma presion.
b) La presion no depende de la forma del recipiente.

7.3. FLUIDOS EN REPOSO 187
7.3.3. Variacion de la presion con la altura en un fluido com-presible
En realidad, solo los lıquidos pueden considerarse fluidos incompresibles. Los gases
son sistemas de elevada compresibilidad. Una pequena variacion de la presion sobre un
gas provoca una notable alteracion de su densidad. En este caso hace falta conocer una
relacion concreta, ρ = ρ(P ), para integrar dP/dy = −ρg.
El caso mas simple es el que sucede en el aire que forma la atmosfera. En este
caso la relacion entre presion y densidad viene dada aproximadamente por la siguiente
expresion:P
P0
=ρ
ρ0
−→ ρ = ρ0P
P0
,
donde P0 y ρ0 son dos valores de la presion y la densidad de referencia, por ejemplo,
en y = 0.dP
dy= − ρ0
P0
gP −→ dP
P= − ρ0
P0
gdy
=⇒ log
(P
P0
)= − ρ0
P0
gy −→ P
P0
= exp
[− ρ0
P0
gy
]=⇒ P = P0 exp
[− ρ0
P0
gy
].
Para pequenas diferencias de altura, con un desarrollo en serie de Taylor se puede
hacer la aproximacion e−x ' 1− x,
=⇒ P ' P0
(1− ρ0g
P0
y
)= P0 − ρgy,
que es la ecuacion del caso incompresible.
7.3.1 Ejemplo
Sabiendo que la densidad del aire en condiciones normales es 1,29 Kg/m3, determina-
remos la diferencia de presion entre el techo y el suelo de una habitacion de 4 m de
altura.
P = P0e− ρ0P0gy
ρ0g
P0
=1,29 kg/m3 9,8 m/s2
1,013× 105 N/m2 = 1,25× 10−4 m−1
=⇒ P = P0 exp[−1,25× 10−4���m−14��m] −→ 0,99950P0.
Otro caso serıa la diferencia de presion entre la base y la altura del monte Everest
(y ' 7000m). En este caso, calculos analogos dan como resultado: P ' 0,42P0.

188 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
0 2000 4000 6000 80000.0
0.2
0.4
0.6
0.8
1.0
P (atm)
y (m)
exponencial
lineal
7.3.4. Principio de Pascal
El hecho de que la presion de un fluido incompresible en un recipiente no dependa
de la forma de este y sea igual para todos los puntos a la misma altura, implica que
si por cualquier circunstancia varıa la presion en un punto, se debe modificar en todos
los puntos del fluido. Este hecho fue observado por primera vez por el cientıfico frances
Blaise Pascal, que enuncio la siguiente ley:
”Un cambio en la presion aplicada a un fluido incompresible encerrado se transmite
ıntegramente a cualquier punto del fluido y a las paredes del recipiente que lo contiene”.
f1
f2
A2A1

7.3. FLUIDOS EN REPOSO 189
7.3.2 Ejemplo
Una aplicacion habitual del principio de Pascal es un elevador hidraulico.
Si A2 >> A1 y se ejerce una fuerza, f1, sobre A1, la presion, P = f1/A1, se debe
transmitir por igual a todos los puntos, en particular a la zona A2.
P =f1
A1
=f2
A2
−→ f2 =A2
A1
f1 >> f1.
Luego la fuerza en 2 es mucho mayor que en 1 y permite elevar objetos muy pesados.
Supongamos como caso numerico particular, que el embolo grande de un elevador
hidraulico tiene un radio de 20 cm. ¿Que fuerza debe aplicarse al embolo pequeno, de
radio 2 cm, para elevar un coche de masa 1500 kg?
Para elevar el coche hay que contrarrestar su peso, luego debe ser como mınimo
f2 = mg = 1,47× 104 N.
f1 =A1
A2
f2 =�πr2
1
�πr22
mg = 147 N.
Es decir, que la fuerza a aplicar en el embolo pequeno es cien veces mas pequena que
el propio peso del coche.
7.3.5. Principio de Arquımedes
”Cualquier cuerpo parcial o totalmente sumergido en un fluido es empujado hacia
arriba por una fuerza que es igual al peso del fluido desplazado por el cuerpo”.
Ademas, la fuerza de empuje tiene una lınea de accion que pasa por el centro de
gravedad del fluido desalojado, es vertical y hacia arriba. La comprobacion de este
principio a partir de las leyes de Newton es sencilla.

190 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
objeto fluido
desalojado
Cuando el objeto esta sumergido, se encuentra en equilibrio traslacional y rotacio-
nal, al igual que el fluido inicialmente. La fuerza que el resto del fluido ejerce sobre el
cuerpo es igual a la que ejerce sobre ese mismo volumen de fluido. Y esa fuerza coincide
precisamente con el peso del fluido. Ademas debe estar dirigida hacia arriba y vale:
fe = ρfgVf ,
donde ρf es la densidad del fluido y Vf el volumen desalojado.
Caso I. Objeto totalmente sumergido, Vf = Vc (Vc, volumen del cuerpo).{empuje −→ fe = ρfgVc
peso del cuerpo −→ P = ρcgVc−→ fneta = fe − P = (ρf − ρc)gVc
Entonces existen dos posibilidades:{ρf > ρc =⇒ fneta hacia arriba −→ el objeto flota
ρf < ρc =⇒ fneta hacia abajo −→ el objeto se hunde
Un hecho importante es que cuando un objeto se pesa en el aire sufre un empuje
ascensional, debido a que el aire es un fluido. Pero su densidad es tan pequena
que este empuje no es mas que una correccion pequenısima al peso del cuerpo en
el vacıo.
Caso II. Objeto parcialmente sumergido, Vf 6= Vc.

7.4. FLUIDOS EN MOVIMIENTO 191
En este caso la fuerza de empuje y el peso del objeto deben ser iguales, para que
exista equilibrio. {empuje −→ fe = ρfgVf
peso del cuerpo −→ P = ρcgVc
como P = fe −→ ρcVc = ρfVf =⇒ Vf =ρcρfVc.
7.3.3 Ejemplo
¿Que fraccion del volumen de un iceberg queda debajo del mar?{ρf = ρmar = 1, 024 g/cm3
ρc = ρhielo = 0, 917 g/cm3
Vf =ρcρfVc −→ Vf
Vc=ρcρf
=0, 917
1, 024= 0,895 =⇒ 89,5 %
7.4. Fluidos en movimiento
Hasta ahora hemos estudiado fluidos en reposo. Dedicaremos ahora nuestra aten-
cion al estudio de la dinamica de fluidos. Para ello consideraremos la variacion de las
propiedades del fluido en un punto determinado como funcion del tiempo. Es decir,
no estudiaremos la variacion en el tiempo de la posicion de cada partıcula, sino de las
propiedades globales del fluido.
7.4.1. Fluido ideal
Cuando un fluido esta en movimiento existen dos grandes tipos de flujo:
i) Estacionario: Cada partıcula del fluido sigue un camino uniforme y las trayectorias
de dos partıculas no se cortan. La velocidad, presion y densidad del fluido en un
punto cualquiera no dependen del tiempo, aunque sı varıen de punto a punto del
fluido. Estas condiciones suelen verificarse cuando las velocidades del flujo son
pequenas.
192 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
ii) Turbulento: Por encima de una cierta velocidad crıtica (para cada tipo de fluido)
el flujo deja de ser estacionario. Se convierte en irregular, se forman remolinos y
turbulencias y las velocidades y demas parametros dejan de ser constantes.
Se dice que el flujo es laminar , si se puede asimilar a un conjunto de laminas
paralelas deslizandose entre sı sin rozamiento. Esto solo es una simplificacion de trabajo,
puesto que en los fluidos reales existen problemas de rozamiento entre unas capas del
fluido y otras, con lo que la energıa mecanica no se conserva ya que parte de la energıa
cinetica se transforma progresivamente en energıa termica.
El camino seguido por una partıcula del fluido en un flujo estacionario se deno-
mina lınea de corriente. La velocidad de la partıcula siempre es tangente a la lınea
de corriente. Dos lıneas de corriente no se pueden cortar por considerar el flujo como
estacionario. Un conjunto de lıneas de flujo se denomina tubo de flujo.
El estudio de un fluido real es muy complejo, por lo que comenzaremos modelizando
un fluido en base a ciertas hipotesis sencillas. Se dice que un fluido es ideal si se verifica
lo siguiente:
a) Fluido no viscoso: se desprecia la friccion interna. Un objeto que se desplace dentro
del fluido no sufre fuerzas opuestas a su movimiento.
b) Flujo estacionario: la velocidad, densidad y presion en un punto del fluido son
constantes en el tiempo.
c) Fluido incompresible: la densidad del fluido es igual en todos los puntos (es constante
espacialmente)2.
d) Flujo irrotacional : no hay momento angular del fluido respecto a ningun punto. Es
decir, si se coloca una pequena rueda en el seno del fluido, simplemente se traslada,
no se producen giros3.
2Esta suele ser una buena aproximacion en lıquidos y tambien en gases si no hay grandes diferenciasde presion.
3Por ejemplo, un flujo con turbulencias no es irrotacional.

7.4. FLUIDOS EN MOVIMIENTO 193
7.4.2. Ecuacion de continuidad
Consideremos ahora una tuberıa de seccion no uniforme por la que circula un flujo
estacionario, con la notacion de la figura adjunta.
Si el fluido es incompresible y el flujo estacionario la masa m1 que pasa por la
seccion de entrada, A1 en un tiempo ∆t debe ser igual que la que pasa por A2 en ese
mismo tiempo: ∆m1 = ∆m2.
v1
v2
A1
A2
x1
x2
Si la velocidad del fluido en A1 es v1, la masa que entra en ∆t recorre un espacio
∆x1 = v1∆t, es decir, llena un cilindro de seccion A1 y longitud x1. La masa contenida
en el es:
∆m1 = ρ1A1∆x1 = ρ1A1v1∆t.
En el otro extremo ocurre lo mismo, luego:
∆m2 = ρ2A2∆x2 = ρ2A2v2∆t,
pero como la masa se conserva:
∆m1 = ∆m2 =⇒ ρ1A1v1��∆t = ρ2A2v2��∆t =⇒ ρ1A1v1 = ρ2A2v2.
Esta expresion se denomina ecuacion de continuidad y no es mas que una manifestacion
de la conservacion de la masa para un flujo estacionario.
En un fluido incompresible la densidad es constante, ρ1 = ρ2, entonces,
A1v1 = A2v2 =⇒ Av = cte.
en cualquier par de puntos de la tuberıa. Es decir, que la velocidad del fluido en la
tuberıa es mayor cuanto mas estrecha es la tuberıa y al contrario.
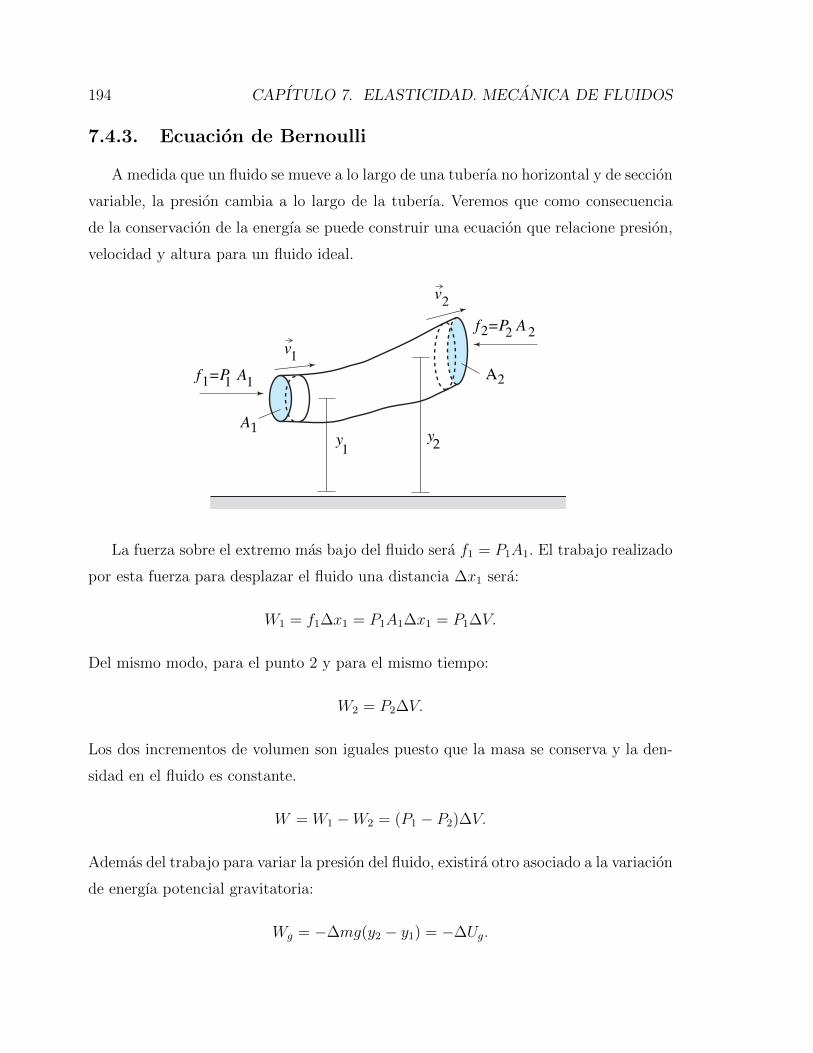
194 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
7.4.3. Ecuacion de Bernoulli
A medida que un fluido se mueve a lo largo de una tuberıa no horizontal y de seccion
variable, la presion cambia a lo largo de la tuberıa. Veremos que como consecuencia
de la conservacion de la energıa se puede construir una ecuacion que relacione presion,
velocidad y altura para un fluido ideal.
v1
v2
A1
A2f =P A1 1 1
f =P A2 2 2
y1
y2
La fuerza sobre el extremo mas bajo del fluido sera f1 = P1A1. El trabajo realizado
por esta fuerza para desplazar el fluido una distancia ∆x1 sera:
W1 = f1∆x1 = P1A1∆x1 = P1∆V.
Del mismo modo, para el punto 2 y para el mismo tiempo:
W2 = P2∆V.
Los dos incrementos de volumen son iguales puesto que la masa se conserva y la den-
sidad en el fluido es constante.
W = W1 −W2 = (P1 − P2)∆V.
Ademas del trabajo para variar la presion del fluido, existira otro asociado a la variacion
de energıa potencial gravitatoria:
Wg = −∆mg(y2 − y1) = −∆Ug.

7.4. FLUIDOS EN MOVIMIENTO 195
El trabajo total sera Wt = W +Wg y aplicando el teorema trabajo-energıa,
Wt = ∆Ec =1
2∆m(v2
2 − v21),
se obtiene:
∆Ec = W +Wg =⇒ (P1 − P2)∆V =1
2∆m(v2
2 − v21) + ∆mg(y2 − y1).
Dividiendo cada termino por ∆V y teniendo en cuenta que ρ = ∆m/∆V ,
P1 − P2 =1
2ρ(v2
2 − v21) + ρg(y2 − y1) =⇒ P1 +
1
2ρv2
1 + ρgy1 = P2 +1
2ρv2
2 + ρgy2
Esta es la ecuacion de Bernoulli , que establece que la suma de la presion, la energıa
cinetica por unidad de volumen y la energıa potencial por unidad de volumen es cons-
tante a lo largo de una lınea de corriente. Escrita de forma mas general:
P +1
2ρv2 + ρgy = cte.
Casos particulares:
Cuando el fluido esta en reposo,
v1 = v2 = 0 =⇒ P1 − P2 = ρgh
lo que esta de acuerdo con la variacion de presion con la profundidad para un
fluido incompresible.
Tuberıa horizontal de seccion no constante.
y1 = y2 −→ P +1
2ρv2 = cte.
Esto quiere decir que cuando aumenta la velocidad del fluido, debe disminuir la
presion y, al contrario, para que esa suma permanezca constante. Este resultado
se suele conocer como efecto Venturi . Esto tambien se puede asociar a la ecuacion
de continuidad, Av = cte.
A ↓↓ −→ v ↑↑ −→ P ↓↓
A ↑↑ −→ v ↓↓ −→ P ↑↑

196 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
El efecto Venturi tiene una aplicacion real muy interesante. El ala de los aviones
se disena de manera que el aire se mueva con mas rapidez en su parte superior
que en la inferior. Esta diferencia de velocidades da lugar a una diferencia de
presiones que tiene como efecto el provocar un empuje ascensional sobre el ala
que hace elevarse el avion.
v 1
P 1
v 2
P 2
f e
v1 > v2 −→ P1 < P2 −→ ~fe hacia arriba
Estas fuerzas se denominan fuerzas de sustentacion. Su valor depende de la veloci-
dad del avion, el area del ala, su forma y su inclinacion respecto a la horizontal.
7.5. Fluidos viscosos
Segun la ecuacion de Bernoulli, si un fluido circula de forma estacionaria por una
tuberıa horizontal y de seccion constante, la presion debe ser la misma en todos los
puntos.4
En la practica, sin embargo, se observa una caıda de presion segun nos desplazamos
en la direccion del flujo. Dicho de otro modo, para que efectivamente exista un flujo
4
P +1
2ρv2 = cte.
Si v = cte. −→ P = cte. y v = cte. si la seccion de la tuberıa lo es, por la ecuacion decontinuidad. Entonces en una tuberıa horizontal de seccion constante, si el fluido es ideal, la presiones constante a lo largo de la tuberıa.

7.5. FLUIDOS VISCOSOS 197
de materia debe haber una diferencia de presion entre los extremos del fluido. Esta
diferencia esta asociada a las fuerzas de rozamiento internas que hay que vencer para
que se produzca un flujo de materia. Estas fuerzas de rozamiento o viscosas se producen
tanto entre el fluido y las paredes de la tuberıa, como entre las distintas laminas de
fluido. Tienen tambien como consecuencia que la velocidad del fluido no sea igual en
todos los puntos de la tuberıa, sino mayor en el eje central y menor junto a las paredes.
l
P1
P2
v
r
A
∆P = P1 − P2 = vAR,
donde R es una constante que mide la resistencia al flujo. Depende de la longitud de
la tuberıa, de su radio y de la viscosidad del fluido, que definiremos a continuacion.
Supongamos un fluido en regimen laminar, y consideremos una porcion de modo
que la parte inferior se mantiene en reposo y a la superior se le aplica una fuerza ~f
que hace que las laminas superiores se desplacen a una velocidad ~v 5. Por efecto de la
viscosidad, la velocidad de las placas ira descendiendo en las inferiores. Si A es el area
de cada placa, se define la viscosidad como:
η =f/A
v/z.
v
v=0
f
z
5Los fluidos en que la fuerza aplicada y la velocidad resultante de las laminas superiores es propor-cional se denominan newtonianos. Estos son por ejemplo el agua y el aire. En otros como la sangre ociertos plasticos la fuerza es proporcional al cuadrado de la velocidad.

198 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
Unidades de η:
S.I. −→ N.s
m2= Pa.s ≡ 10 poise
S. ceg. −→ dina.s
cm2= poise
Los ordenes de magnitud de la viscosidad de algunos fluidos se representan en la si-
guiente tabla.
Fluido t (oC) η (mPa · s)
Agua 0 1.820 1.060 0.65
Sangre 37 4.0Aceite de motor 30 200
Glicerina 0 104
20 1,41× 103
60 81Aire 20 1,8× 10−2
Generalmente, la viscosidad aumenta al disminuir la temperatura. En terminos de
η, se puede demostrar que la resistencia al flujo, R, viene dada por:
R =8η`
πr4,
que sustituida en la expresion para a caıda de presion en una tuberıa horizontal de
seccion circular resulta:
∆P =8η`
πr4Av,
que se denomina ley de Poiseuille. Luego la caıda de presion en proporcional a la
viscosidad e inversamente proporcional a la cuarta potencia del radio de la tuberıa.
Cuando la velocidad de flujo de un fluido es suficientemente grande, se rompe el
flujo laminar y aparecen turbulencias, con torbellinos o remolinos que complican mucho
el estudio de la dinamica del fluido. Se puede definir un parametro adimensional que
caracteriza el regimen laminar o turbulento.
NR =2rρv
η.

7.5. FLUIDOS VISCOSOS 199
Se denomina numero de Reynolds y aproximadamente:{NR < 2000 −→ regimen laminar
NR > 2000 −→ regimen turbulento

200 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
7.6. Problemas
1. Un bloque de un material desconocido pesa 3 N en aire y 1,89 N cuando esta su-
mergido en agua. ¿Cual es su densidad? ¿Que correccion debera tenerse en cuenta
debido a la fuerza ascensional en el aire cuando se pesa en el?
(Respuestas : ρ = 2,7× 103 kg/m3; Paire/Pvacio = 0,9995 )
2. La tension superficial del mercurio es 0,465 N/m y θc = 140o. En un recipiente
lleno de mercurio se introduce un tubo capilar de 3 mm de radio. ¿Cual es la
altura del mercurio en el tubo?
(Respuestas : h = −1,78 mm )
3. Un deposito de agua tiene un pequeno orificio a una distancia h por debajo de la
superficie del agua. Halla la velocidad del agua cuando escapa por el orificio.
(Respuestas : vb = (2gh)1/2 mm )
4. Por una tuberıa horizontal circula agua a 4 m/s bajo una presion de 200 kPa.
La tuberıa se estrecha progresivamente hasta llegar a la mitad de su diametro
original. Halla la velocidad y la presion del agua en la parte mas estrecha de la
tuberıa.
(Respuestas : v2 = 16,0 m/s; P2 = 80 kPa )
5. Una presa esta llena de agua hasta una altura H. Si su anchura es a, determınese
la fuerza total que actua sobre ella.
(Respuestas : P =1
2ρ g aH2 )
6. Un objeto de aluminio, suspendido de un dinamometro, se sumerge completa-
mente en un recipiente con agua. Si su masa es 1 kg y la densidad del aluminio
vale 2,7 × 103 kg/m3, calculese la tension que marca el dinamometro antes y
despues de sumergir el objeto.
(Respuestas : T2 = 6,17 N )

7.6. PROBLEMAS 201
7. Un tubo Venturi tiene como secciones en los puntos 1 y 2, A1 y A2. Si la diferencia
de presiones en estos puntos, P1 − P2, es conocida, calcula la velocidad del flujo
en el punto 2.
(Respuestas : v2 = A1
(2(P1 − P2)
ρ(A21 − A2
2)
)1/2
)
8. Una placa de metal de 0,15 m2 de area se conecta por medio de una polea ideal
a una masa de 8 g. Se coloca un lubricante de 0,3 mm de espesor entre la placa y
la superficie. Cuando se libera el sistema, se observa que la placa se mueve hacia
la derecha con una velocidad constante de 0,085 m/s. Determınese la viscosidad
del lubricante.
(Respuestas : η = 5,53× 10−3 Pa.s )
9. Un lingote de oro y cobre pesa 6660 g. Sumergido en el agua pesa 6250 g. Sabiendo
que las densidades del oro y del cobre son 19,5 g/cm3 y 8,9 g/cm3 respectivamente,
calculese el tanto por ciento de oro que contiene el lingote.
(Respuestas :mo
mo +mc
= 83,1 % )
10. Un cubo de un material de densidad 0,7 g/cm3 y de 20 cm de arista esta en el fondo
de un recipiente que contiene aceite (ρa = 0,8 g/cm3) a 40 cm de la superficie.
Su base inferior esta sobre un orificio circular de 200 cm2 de una canerıa de
desague que sobresale 2 mm del fondo del recipiente. Calcula la presion del aire
que habra que inyectar por la canerıa de desague para que el cubo se desprenda.
(Respuestas : P = 4,31× 103 Pa )
11. Un globo lleno de gas sufre una fuerza de friccion con el aire que viene dada por:
fr = 0,2 v, donde v es su velocidad en el S.I.. Si la masa total del globo y el gas
que contiene es 10 g y el globo parte del reposo:
a) Representa graficamente la aceleracion del globo en funcion de la velocidad si
el empuje es de 1,8 N.
b) ¿Cual es la maxima velocidad que alcanzara el globo?
(Respuestas : b) vmax = 8,5 m/s)

202 CAPITULO 7. ELASTICIDAD. MECANICA DE FLUIDOS
12. Para medir la velocidad de las aguas de un rıo se introduce en el un tubo acodado
en angulo recto con un pequeno orificio en su extremo. El agua asciende en el
tubo una altura h = 10 cm. Calcula la velocidad del rıo.
(Respuestas : v = 1,4 m/s )
13. El ala de un avion tiene 4 m2 de superficie y 300 kg de masa. La velocidad del
aire en la cara superior es de 70 m/s y debajo de la cara inferior 50 m/s. ¿Cual
es la fuerza de sustentacion del ala? ¿Cual es la fuerza total que actua sobre ella?
(densidad del aire: ρ = 1,29 kg/m3).
(Respuestas : f = 3252 N )
14. Un deposito de gran superficie, de 10 m de altura, se encuentra lleno de agua.
De una pared lateral sale una tuberıa de 500 cm2 de seccion, que acaba horizon-
talmente 2 m por debajo del deposito. En la parte final de este tramo horizontal
la tuberıa se estrecha hasta presentar una seccion final uniforme de 250 cm2.
Calcula la presion en la parte horizontal de la tuberıa de seccion 500 cm2.
(Respuestas : P = 1,88× 105 Pa )
15. Disponemos de una plancha de corcho de 1 dm de espesor. Calcula la superficie
mınima que debe tener para flotar en el agua sosteniendo a un naufrago de 70
kg. Masa especıfica del corcho: 0,24 g/cm3.
(Respuestas : A = 0,92 m2 )
16. Un objeto de corcho se deja caer desde una altura de 5 m sobre la superficie de
un lago. Considerando que se opone al movimiento el empuje del agua y que la
densidad del corcho es 0,2 g/cm3, calcula:
a) ¿Cuanto se hunde el objeto en el agua?
b) ¿Cuanto tiempo tarda en llegar a esa profundidad y volver a la superficie?
(Respuestas : a) h′ = 1,25 m; b) T = 0,5 s )

7.6. PROBLEMAS 203
17. Destapamos un orificio de radio R1 que se encuentra en el fondo de un deposito
cilındrico lleno de agua que tiene radio R2 y una altura H. Si el proceso de vaciado
no es turbulento, obtengase el tiempo que tarda en vaciarse el deposito.
(Respuestas : T =1
r21
[2H
g(r4
2 − r41)
]1/2
)
18. Un vaso cilındrico tiene un radio de 5 cm y se encuentra lleno de agua hasta una
altura de 20 cm. Se echa un cubito de hielo de arista 1 cm. Calcular el incremento
de presion sobre el fondo del vaso al echar el cubito. (Datos: ρagua = 103 kg/m3;
ρhielo = 900 kg/m3.)


Parte II
Fundamentos de oscilaciones yondas


Capıtulo 8
Movimiento oscilatorio
8.1. Introduccion
Los principales objetivos de los capıtulos dedicados a la Mecanica Clasica fueron
como predecir el movimiento de un cuerpo si se conocen su estado inicial (velocidad
y posicion) y las fuerzas que actuan sobre el. Un caso particular es cuando la fuerza
es proporcional al desplazamiento del cuerpo desde su posicion de equilibrio. Si dicha
fuerza siempre esta dirigida hacia la posicion de equilibrio se produce un movimiento
de ida y vuelta, es decir, un movimiento periodico u oscilatorio. En Fısica, y en la
Naturaleza en general, hay gran variedad de ejemplos de este tipo de movimiento y de
ahı la importancia de su estudio:
los latidos del corazon
el movimiento del pendulo de un reloj
la vibracion de las moleculas de un solido alrededor de sus posiciones de equilibrio
la corriente electrica que circula por el filamento de una bombilla
las vibraciones de las cuerdas de un violın.
El movimiento oscilatorio esta intrınsecamente relacionado con los fenomenos ondu-
latorios. Cuando vibra la cuerda de un violın se producen oscilaciones de las moleculas
del aire que lo rodea y, por el contacto o interaccion entre unas y otras, las oscila-
ciones se propagan en el espacio en forma de onda. Luego, por ejemplo, el sonido y

208 CAPITULO 8. MOVIMIENTO OSCILATORIO
su transmision (como veremos en el siguiente tema) no son mas que consecuencia de
movimientos de tipo oscilatorio. El ejemplo mas sencillo de movimiento oscilatorio es
el denominado movimiento armonico simple (MAS) que se produce cuando un cuerpo
oscila indefinidamente entre dos posiciones espaciales fijas sin perder energıa mecanica.
Ademas de ser el tipo de movimiento oscilatorio mas facil de describir matematicamen-
te, constituye una buena aproximacion a muchas oscilaciones que se encuentran en la
Naturaleza.
8.2. Cinematica del movimiento armonico simple
Se dice que una partıcula que se mueve a lo largo del eje x realiza un movimiento
armonico simple cuando su desplazamiento respecto a su posicion de equilibrio varıa
con el tiempo de acuerdo con la relacion 1:
x(t) = A cos(ωt+ δ),
donde A, ω y δ son constantes del movimiento 2. La representacion grafica de x = x(t)
tiene esta forma:
t
ωt= π/2
ωt=3 π/2ωt= π
ωt=2 π
T
A
x
Conceptos basicos en la descripcion de este tipo de movimiento son los siguientes:
A: Amplitud −→ maximo desplazamiento de la partıcula (negativo o positivo)
respecto de su posicion de equilibrio.
1Conviene recordar que las funciones senx y cosx son periodicas: sen(x + 2nπ) = senx; cos(x +2nπ) = cosx. Por lo que, como veremos mas adelante esta funcion para x(t) representa un movimientoperiodico en el tiempo.
2Sabiendo que cosx = sen(x + π/2), se puede definir un MAS alternativamente segun x(t) =Asen(ωt+ δ + π/2) ≡ Asen(ωt+ δ′).

8.2. CINEMATICA DEL MOVIMIENTO ARMONICO SIMPLE 209
δ: Desfase inicial −→ junto a la amplitud indica cuales son las condiciones ini-
ciales del movimiento. Se determina, como veremos mas adelante, a partir de la
posicion y velocidad iniciales.
ωt+ δ: Fase.
T : Periodo. Es el tiempo que necesita la partıcula para realizar un ciclo completo
de su movimiento. Es decir, x(t) = x(t+ T ). En el tiempo T la fase aumenta 2π.
ω(t+ T ) + δ = ωt+ δ + 2π −→ ωT = 2π −→ ω =2π
To T =
2π
ω.
ω: Frecuencia angular (se mide en el S.I. en rad/s).
f = 1/T : Frecuencia −→ numero de oscilaciones por unidad de tiempo que realiza
la partıcula: 2πf = ω. En el S.I. se mide en 1/s o herzios (Hz).
t
x(t)
t
v(t)
t
a(t)
-A
-ωA
-ω A2
δ=0

210 CAPITULO 8. MOVIMIENTO OSCILATORIO
La velocidad y la aceleracion de una partıcula que realiza un MAS se obtienen sin
mas que derivar su posicion en funcion del tiempo:
v(t) =dx
dt= −ωA sen(ωt+ δ) (8.1)
a(t) =dv
dt= −ω2A cos(ωt+ δ) = −ω2x(t). (8.2)
v(t) y a(t) son tambien funciones oscilantes y tienen la misma frecuencia que x(t), pero
diferente amplitud y desfase:
Amplitudes :
x −→ xmax = A
v −→ vmax = ωA
a −→ amax = ω2A
Desfases :
{x− v −→ π/2
x− a −→ π
La amplitud, A, y el desfase, δ, del movimiento se obtienen a partir de las condi-
ciones iniciales del siguiente modo:
x(t) = A cos(ωt+ δ) −→ x(t = 0) ≡ x0 = A cos δ
v(t) = −Aω sen(ωt+ δ) −→ v(t = 0) ≡ v0 = −Aω sen δ.
Dividiendo ambas ecuaciones:
v0
x0
= −ω tan δ −→ tan δ = − v0
ωx0
=⇒ δ = arctan
(− v0
ωx0
). (8.3)
Por otra parte: x0
A= cos δ
− v0
Aω= sen δ
Elevando al cuadrado y sumando:
x20
A2+
v20
A2ω2= 1 −→ A2 = x2
0 +v2
0
ω2=⇒ A =
(x2
0 +v2
0
ω2
)1/2
. (8.4)
Para concluir este apartado resumiremos las propiedades mas importantes de la ci-
nematica del MAS:

8.3. DINAMICA DEL MOVIMIENTO ARMONICO SIMPLE 211
1. x(t), v(t) y a(t) son funciones oscilantes (senoidales) pero de diferentes amplitudes
y desfasadas entre sı.
2. La aceleracion es proporcional al desplazamiento, pero en sentido opuesto.
3. La frecuencia y el periodo del movimiento son independientes de la amplitud.
8.3. Dinamica del movimiento armonico simple
Ahora que ya sabemos como describir el movimiento armonico simple, investiga-
remos sus posibles causas, es decir, las fuerzas que lo provocan. El sistema fısico mas
sencillo que da lugar a un movimiento de este tipo es un muelle que horizontalmente
sujeta una masa (y se desprecian los rozamientos).
x
x=0
-x
k

212 CAPITULO 8. MOVIMIENTO OSCILATORIO
Cuando la masa se desplaza ligeramente de su posicion de equilibrio el muelle ejerce
una fuerza sobre ella proporcional a la elongacion pero con signo opuesto a ella y que
viene dada por la ley de Hooke,
f = −kx,
donde k es una constante que depende de las caracterısticas del muelle. Despejando la
aceleracion (f = ma):
a = − kmx.
Luego al igual que en el MAS, la aceleracion es proporcional en modulo al despla-
zamiento y de sentido opuesto. Comprobemos que, efectivamente, la masa realiza un
MAS estudiando la ecuacion de movimiento,
d2x
dt2= − k
mx.
Es facil comprobar que la solucion de esta ecuacion puede escribirse:
x(t) = A cos(ωt+ δ) donde ω =
(k
m
)1/2
.
En efecto: dx
dt= −Aω sen(ωt+ δ)
d2x
dt2= −Aω2 cos(ωt+ δ)
−Aω2 cos(ωt+ δ) = − kmA cos(ωt+ δ) =⇒ debe ser ω2 =
k
m.
Con esto podemos concluir que siempre que sobre una partıcula actue una fuerza
proporcional a su desplazamiento y en sentido opuesto a este, realiza un MAS. El
periodo y la frecuencia del desplazamiento son:T =
2π
ω= 2π
(mk
)1/2
f =1
T=
1
2π
(k
m
)1/2
T y f solo dependen de la masa y de la construccion del resorte. La frecuencia es
mayor para un resorte duro y al contrario.

8.4. ENERGIA DE UN OSCILADOR ARMONICO SIMPLE 213
8.4. Energıa de un oscilador armonico simple
En temas anteriores ya estudiamos que un sistema masa-resorte es conservativo y
que su energıa potencial viene dada por:
U(x) =1
2kx2.
La energıa total del sistema sera:
E = Ec + U =1
2mv2 +
1
2kx2.
Por el principio de conservacion de la energıa, E debe ser una constante del movimiento
(si despreciamos las fuerzas de tipo no conservativo), por lo que para calcularla podemos
elegir el punto mas comodo. Elijamos, por ejemplo, el punto donde la elongacion es
maxima y la velocidad nula, es decir, en los extremos de la trayectoria:
x = A cos(ωt+ δ) −→ x = A
v = −Aω sen(ωt+ δ) −→ v = 0.
t
U(t)
E (t)c
E=cte.
En ese punto:
E =1
2kA2.
Esta es la energıa de un MAS. Como vemos solo depende de la amplitud del movimiento
y de la constante del muelle. Como la energıa mecanica es constante es instructivo
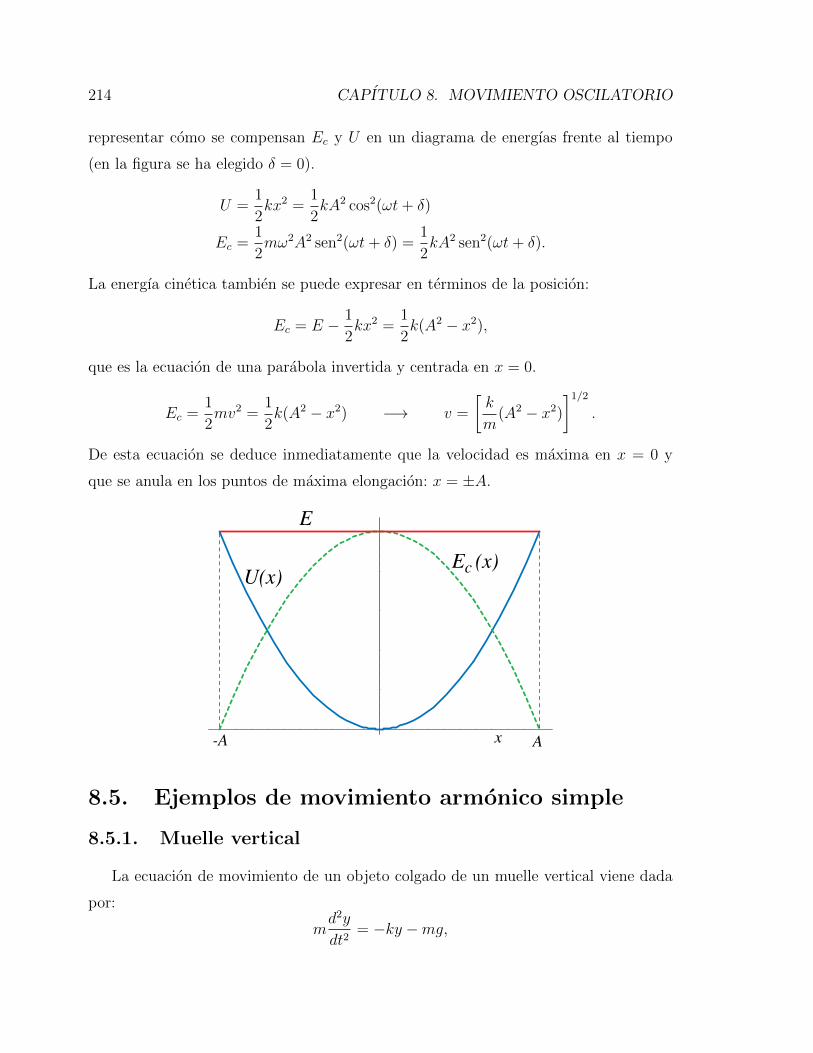
214 CAPITULO 8. MOVIMIENTO OSCILATORIO
representar como se compensan Ec y U en un diagrama de energıas frente al tiempo
(en la figura se ha elegido δ = 0).
U =1
2kx2 =
1
2kA2 cos2(ωt+ δ)
Ec =1
2mω2A2 sen2(ωt+ δ) =
1
2kA2 sen2(ωt+ δ).
La energıa cinetica tambien se puede expresar en terminos de la posicion:
Ec = E − 1
2kx2 =
1
2k(A2 − x2),
que es la ecuacion de una parabola invertida y centrada en x = 0.
Ec =1
2mv2 =
1
2k(A2 − x2) −→ v =
[k
m(A2 − x2)
]1/2
.
De esta ecuacion se deduce inmediatamente que la velocidad es maxima en x = 0 y
que se anula en los puntos de maxima elongacion: x = ±A.
A-A
E
E (x)cU(x)
x
8.5. Ejemplos de movimiento armonico simple
8.5.1. Muelle vertical
La ecuacion de movimiento de un objeto colgado de un muelle vertical viene dada
por:
md2y
dt2= −ky −mg,

8.5. EJEMPLOS DE MOVIMIENTO ARMONICO SIMPLE 215
ecuacion diferencial que difiere de la de un oscilador armonico simple en el termino
constante mg 3. Al colgar la masa del muelle en reposo este se deforma una cierta
elongacion, de manera que cuando alcanza el equilibrio se verifica:
0 = −ky0 −mg −→ y0 = −mgk,
donde y0 es la nueva posicion de equilibrio.
Haciendo el cambio de variable,
y′ ≡ y − y0 →
dy
dt=dy′
dt
d2y
dt2=d2y′
dt2
=⇒ md2y′
dt2= −k(y′ + y0)−mg = −ky′.
y0
y0
y'
k
m
y
Tras este cambio de variables la ecuacion de movimiento obtenida es identica a la
de un MAS (es decir, que si despues de alcanzarse el equilibrio gravitacional, la masa
experimenta una elongacion, el movimiento que se produce es un MAS alrededor de
esa posicion de equilibrio). Su solucion sera:
y′ = A cos(ωt+ δ) con ω =
√k
m.
3Criterio de signos para y: ↑ y > 0; ↓ y < 0.

216 CAPITULO 8. MOVIMIENTO OSCILATORIO
Luego el unico efecto de la fuerza gravitatoria es desplazar la posicion de equilibrio
de y = 0 a y′ = 0 (y = y0). La energıa potencial de este muelle sera U = ky′2/2 (U = 0
en y′ = 0).
8.5.2. Pendulo simple
El pendulo simple consta de una masa puntual, m, suspendida de un hilo de lon-
gitud, `, inextensible y de masa despreciable frente a m. El otro extremo del hilo se
encuentra sujeto a una posicion fija. Demostraremos que el pendulo realiza un MAS
cuando se desplaza ligeramente de su posicion vertical de equilibrio y se deja evolucio-
nar libremente, considerando que no hay rozamientos.
P
T
θ
θs
l
m
La fuerza en la direccion tangente al movimiento viene dada por:
ft = −mg sen θ = md2s
dt2−→ d2s
dt2= `
d2θ
dt2= −g sen θ
=⇒ d2θ
dt2= −g
`sen θ.
Si θ es suficientemente pequeno se puede hacer la aproximacion, sen θ ' θ. Esto se debe
a que haciendo un desarrollo en serie de la funcion senx se obtiene senx = x−x3/3!+. . .
y cortando el desarrollo en el primer termino la diferencia entre x y senx solo es de un
1 % cuando θ ∼ 15o.

8.5. EJEMPLOS DE MOVIMIENTO ARMONICO SIMPLE 217
50 150 250 350
-1
-0.5
0.5
1
x
sen(x)
5 10 15 20 25 30
1
2
3
4
x (º)
x (º)
|x-sen(x)|
x x 100
Luego si el pendulo no oscila con demasiada amplitud, su ecuacion de movimiento
angular es la de un MAS: θ = θmax cos(ωt + δ). La frecuencia del movimiento y el
periodo son:
ω =(g`
)1/2
; T =2π
ω= 2π
(`
g
)1/2
.
Ambos parametros solo dependen de l y g, no de la masa. Entonces todos los pendulos
de igual longitud oscilaran del mismo modo.
El pendulo simple suele utilizarse en la practica para gran cantidad de aplicaciones
que se podrıan dividir en dos bloques:
medir tiempos −→ su periodo es constante (salvo rozamientos y variaciones de
` por las condiciones termodinamicas o de g por la latitud o altitud) y es facil
visualizar el numero de oscilaciones.
medir g −→ las medidas de g con este metodo son bastante precisas, lo que es
importante porque cambios locales de g pueden dar informacion valiosa sobre la
localizacion de recursos minerales o energeticos.
8.5.3. Pendulo fısico
Cualquier solido rıgido colgado de algun punto que no sea su centro de masas
oscilara cuando se desplace de su posicion de equilibrio. Este dispositivo recibe el
nombre de pendulo fısico o compuesto.

218 CAPITULO 8. MOVIMIENTO OSCILATORIO
φ
h sen φ c.m.
P
eje de
giro
m, I
z
h
El momento del peso respecto al eje de giro sera τ = mgh senφ y la segunda ley de
Newton para la rotacion se expresara,
τ = Iα = Id2φ
dt2.
El momento ejercido por la gravedad tiende a disminuir el angulo φ por lo que:
−mgh senφ = Id2φ
dt2−→ d2φ
dt2= −mgh
Isenφ.
Para un pendulo simple, I = ml2 y h = l, con lo que se recuperan las ecuaciones del
apartado anterior. Cuando los desplazamientos angulares son pequenos senφ ' φ y
d2φ
dt2= −mgh
Iφ = −ω2φ donde ω =
(mgh
I
)1/2
y T = 2π
(I
mgh
)1/2
.
Este dispositivo puede utilizarse para determinar momentos de inercia de solidos rıgi-
dos.
8.5.4. Pendulo de torsion
Un pendulo de torsion esta formado por un cuerpo rıgido como un disco o una
varilla colgado de una fibra vertical. Cuando se gira el cuerpo tomando como eje la
fibra, esta ejerce un momento que tiende a recuperar la situacion inicial.

8.6. M.A.S. Y MOVIMIENTO CIRCULAR UNIFORME 219
θ
I
k
Para la mayorıa de las fibras el momento suele ser proporcional al desplazamiento
angular,
τ = −kθ = Id2θ
dt2
−→ d2θ
dt2= −k
Iθ = −ω2θ =⇒ ω =
(k
I
)1/2
.
En este caso no hemos necesitado hacer ninguna aproximacion para angulos pequenos.
Siempre que el momento de la fuerza restauradora sea lineal con θ se produce un MAS.
8.6. M.A.S. y movimiento circular uniforme
Existe una relacion matematica sencilla pero interesante entre el MAS y el movi-
miento circular uniforme. Consideremos una partıcula que se mueve con velocidad v
constante sobre una circunferencia de radio A. Su velocidad angular sera ω = v/A y si
δ es el desplazamiento angular en t = 0, se verifica:
θ = ωt+ δ.

220 CAPITULO 8. MOVIMIENTO OSCILATORIO
θ
Acos θ
Av
y
x
La componente x de su posicion en funcion del tiempo se puede obtener ası:
x = A cos θ = A cos(ωt+ δ).
Esta ecuacion es la del desplazamiento de un MAS. Es decir, la proyeccion de la posi-
cion de la partıcula sobre el eje x realiza un movimiento oscilatorio de amplitud A y
frecuencia angular que coincide con la velocidad angular de rotacion.
Del mismo modo, la proyeccion sobre el eje y tambien realiza un MAS, pero des-
plazado π/2 respecto a la proyeccion sobre x. Por lo tanto, un movimiento circular
uniforme se puede considerar como la composicion de dos movimientos armonicos de
igual frecuencia y desplazados π/2. A partir de dos movimientos armonicos tambien
es posible describir movimientos mas complicados. Se denominan figuras de Lissajous.
Algunos ejemplos estan representados en la grafica adjunta.
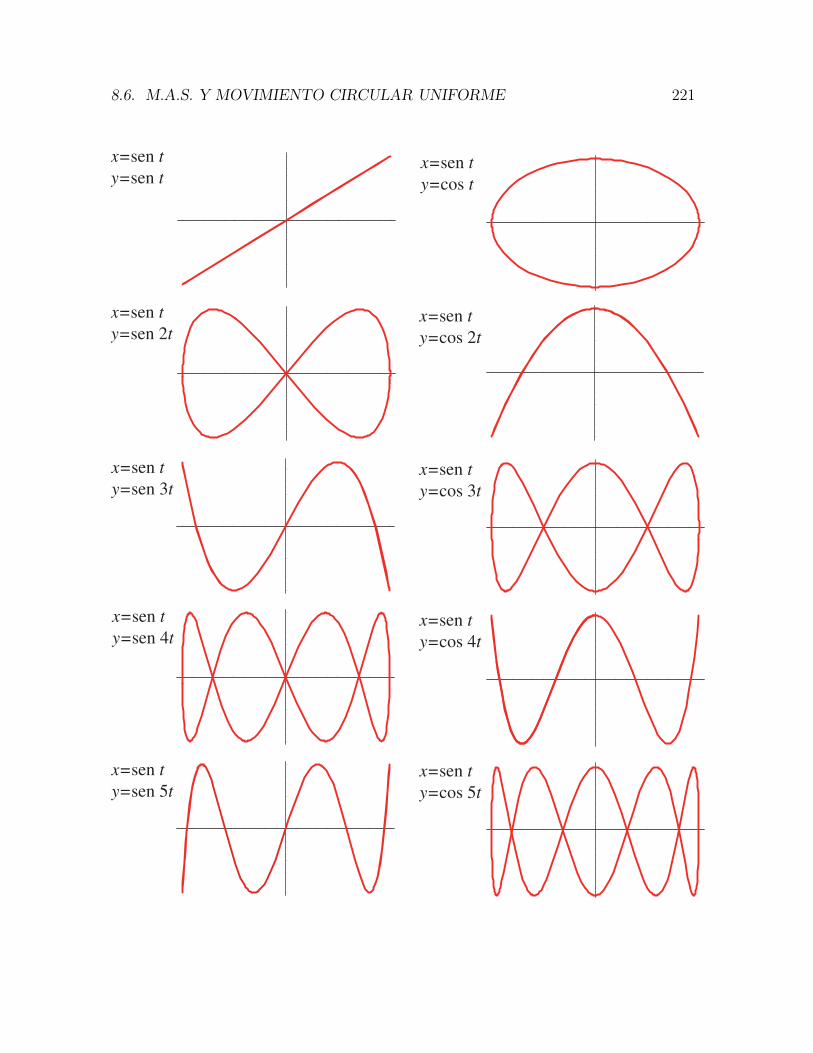
8.6. M.A.S. Y MOVIMIENTO CIRCULAR UNIFORME 221
1
x=sen t
y=sen t
x=sen t
y=sen 2t
x=sen t
y=sen 3t
x=sen t
y=sen 4t
x=sen t
y=sen 5t
x=sen t
y=cos t
x=sen t
y=cos 2t
x=sen t
y=cos 3t
x=sen t
y=cos 4t
x=sen t
y=cos 5t

222 CAPITULO 8. MOVIMIENTO OSCILATORIO
8.7. Movimiento en las proximidades del equilibrio
Siempre que se desplaza una partıcula desde una posicion de equilibrio estable
aplicandole una pequena perturbacion, el movimiento que se produce es de tipo armoni-
co simple. Supongamos una fuerza arbitraria correspondiente a una cierta funcion
energıa potencial y veamos como son las curvas U = U(x) y f = f(x) sabiendo que
f = −dU/dx.
U
x
~kx 2
x1
x2
f
xx2
f
x
f ~ -kx
x1
x1
En el diagrama de fuerzas, x1, es una posicion de equilibrio estable porque por ejemplo
un pequeno desplazamiento positivo da lugar a una fuerza negativa que tiene a restituir
la posicion de equilibrio. Sin embargo, para x2 desplazamiento y fuerza tienen el mismo
signo, es un punto de equilibrio inestable. Geometricamente la fuerza que devuelve la
partıcula a la posicion x1 se puede aproximar localmente por una recta de tipo f ∼ −kx(en el diagrama U = U(x) esto corresponde a aproximar el mınimo por una parabola).
Matematicamente, si x1 es un mınimo local de U(x), se puede hacer un desarrollo en

8.8. MOVIMIENTO ARMONICO AMORTIGUADO 223
serie del siguiente modo:
U(x) = U(x1) +
(dU
dx
)x1
(x− x1) +1
2!
(d2U
dx2
)x1
(x− x1)2 + . . . (8.5)
con lo que a primer orden:
f(x) = −dUdx' −
(d2U
dx2
)x1
(x− x1) ≡ −k(x− x1),
donde k es una constante. Es decir, que en un entorno de la posicion de equilibrio la
fuerza que actua sobre la partıcula se puede aproximar por el tipo de fuerza que provoca
un MAS. Podemos concluir, pues, que cuando sobre una partıcula en una situacion de
equilibrio estable actua una perturbacion de pequena amplitud la partıcula efectua un
MAS alrededor de esa posicion. En resto de los terminos despreciados en la ecuacion
anterior para U(x) se denominan anarmonicos y son una medida de la diferencia de la
forma de U(x) respecto a una parabola en torno a x1. En la representacion de fuerzas,
los terminos anarmonicos son de la forma: −k′(x− x1)2 − k′′(x− x1)3 − . . . .
8.8. Movimiento armonico amortiguado
Los movimientos oscilatorios que hemos considerado hasta ahora se refieren a siste-
mas ideales, es decir, oscilan indefinidamente bajo la accion de una fuerza lineal opuesta
al desplazamiento. Sin embargo, en los sistemas reales siempre estan presentes fuerzas
disipativas que hacen que la energıa mecanica se vaya perdiendo progresivamente. En
este caso se dice que el movimiento armonico esta amortiguado.
Un tipo habitual de fuerzas de friccion son las proporcionales a la velocidad fr =
−bv. La ecuacion de movimiento de un sistema sometido a una fuerza lineal y otra de
rozamiento serıa:
md2x
dt2= −kx− bv.
Un ejemplo fısico de esta situacion serıa un muelle sumergido en un fluido. Resolviendo
la ecuacion diferencial anterior se puede obtener que su solucion es de la forma,
x(t) = Ae−b
2mt cos(ωt+ δ),

224 CAPITULO 8. MOVIMIENTO OSCILATORIO
donde la frecuencia viene dada por:
ω =
[k
m−(
b
2m
)2]1/2
.
Evidentemente en el lımite b = 0 se recupera la solucion de un MAS. Exceptuando la
exponencial que aparece en la amplitud, el movimiento que resulta es de tipo oscila-
torio con una frecuencia menor que si no hubiese rozamiento. Pero, ademas, el factor
exponencial hace que la amplitud del movimiento decrezca de forma progresiva. Si el
amortiguamiento es pequeno la ecuacion anterior da como solucion una funcion de la
siguiente forma:
t
x
A Ae-(b/2m) t
x(t)
Se dice que el movimiento es subamortiguado. Matematicamente se produce cuando
(b/2m)2 < k/m. Cuando el amortiguamiento es muy grande [(b/2m)2 > k/m], ni
siquiera se producen oscilaciones. Se habla entonces de movimiento sobreamortiguado
y la solucion matematica es:
x(t) = e−b
2mt(Aeωt +Be−ωt
)

8.9. OSCILACIONES FORZADAS Y RESONANCIAS 225
x
t
crítico
sobreamortiguado
Existe ademas el caso especial en que (b/2m)2 = k/m. En esta situacion, ademas
de no haber oscilaciones la caıda de la amplitud es mas rapida que en el caso sobre-
amortiguado. Se dice que el amortiguamiento es crıtico. Matematicamente la solucion
es de la forma:
x(t) = e−ωt(A+Bt) con ω =
√k
m.
Aunque tampoco lo haremos, se puede demostrar formalmente que la perdida de la
energıa mecanica con el tiempo en este tipo de movimiento es exponencial:
E = E0e−t/τ con τ =
m
b,
donde τ es una constante de tiempo que mide la rapidez con que se pierde la energıa. Se
denomina factor de calidad , Q, a una magnitud adimensional que relaciona la energıa
total, E, con la energıa perdida en un periodo, ∆E:
Q ≡ 2πE
| ∆E |.
8.9. Oscilaciones forzadas y resonancias
Es posible compensar la perdida de energıa de un oscilador amortiguado aplicando
una fuerza externa. Esto es, por ejemplo, lo que hace un nino en un columpio para
mantenerse en movimiento. Realiza impulsos sincronizados de cierto modo para que
se compensen las fricciones. Otro ejemplo es que para mantener oscilando un muelle

226 CAPITULO 8. MOVIMIENTO OSCILATORIO
vertical se puede ejercer una fuerza oscilatoria sobre su soporte para mantener el mo-
vimiento. En el caso mas comun las fuerzas aplicadas son periodicas , por ejemplo de
la forma,
f = f0 cosω0t.
La ecuacion de movimiento ahora sera:
md2x
dt2= f0 cosω0t− b
dx
dt− kx.
La solucion de esta ecuacion consta de dos partes, la solucion transitoria y la solucion
estacionaria. La transitoria es analoga a la de un oscilador amortiguado, con constantes
que dependen de las condiciones iniciales. Quiere esto decir que desde que se comienza
a aplicar la fuerza externa hasta que desaparece el amortiguamiento y la amplitud se
mantiene constante pasa un cierto tiempo. Cuando el movimiento se ha estabilizado la
solucion de la ecuacion es estacionaria, ya no depende de las condiciones iniciales y se
puede escribir ası,
x(t) = A cos(ω0t− δ),
donde ω = (k/m)1/2, ω0 es la frecuencia de la fuerza impulsora y:
A =
f0
[m2(ω20 − ω2)2 + b2ω2]
1/2
tan δ =bω
m(ω20 − ω2)
Ahora la amplitud depende de dos frecuencias. Si consideramos que la del oscilador,
ω es fija y variamos la externa, se obtiene una figura ası para la amplitud A:
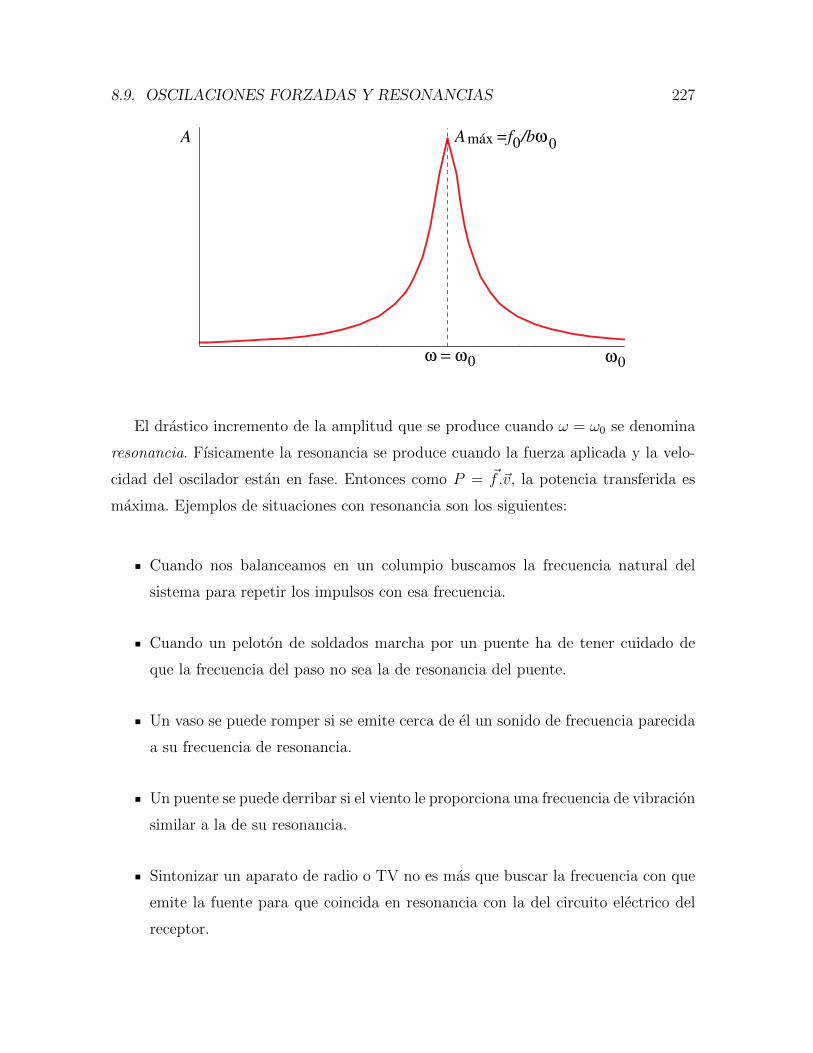
8.9. OSCILACIONES FORZADAS Y RESONANCIAS 227
A
ω0ω = ω0
A =f /bω0máx 0
El drastico incremento de la amplitud que se produce cuando ω = ω0 se denomina
resonancia. Fısicamente la resonancia se produce cuando la fuerza aplicada y la velo-
cidad del oscilador estan en fase. Entonces como P = ~f.~v, la potencia transferida es
maxima. Ejemplos de situaciones con resonancia son los siguientes:
Cuando nos balanceamos en un columpio buscamos la frecuencia natural del
sistema para repetir los impulsos con esa frecuencia.
Cuando un peloton de soldados marcha por un puente ha de tener cuidado de
que la frecuencia del paso no sea la de resonancia del puente.
Un vaso se puede romper si se emite cerca de el un sonido de frecuencia parecida
a su frecuencia de resonancia.
Un puente se puede derribar si el viento le proporciona una frecuencia de vibracion
similar a la de su resonancia.
Sintonizar un aparato de radio o TV no es mas que buscar la frecuencia con que
emite la fuente para que coincida en resonancia con la del circuito electrico del
receptor.

228 CAPITULO 8. MOVIMIENTO OSCILATORIO
8.10. Analisis de Fourier de movimientos periodicos
El movimiento armonico simple es unicamente un caso particular de movimiento
periodico u oscilatorio. En general, un movimiento periodico esta descrito por x = f(t)
donde la funcion f(t) verifica:
f(t) = f(t+ T ).
Es decir, que el valor que toma se repite con periodo T . Por ejemplo, la funcion que
se representa en esta figura es una funcion periodica, pero no armonica simple. Sin
embargo, se puede expresar como combinacion de dos movimientos armonicos simples
con distintas amplitudes y frecuencias.
t
f(t)
g (t)1
g (t)2
f(t)=a sen (ωt)+b sen (2ωt)
T
Un movimiento periodico cualquiera se puede siempre expresar como combinacion
de varios movimientos armonicos simples. Matematicamente este resultado se conoce
como teorema de Fourier : dada una funcion f(t) periodica y con periodo T = 2π/ω
siempre se puede expresar como la suma,
f(t) =a0 + a1 cosωt+ a2 cos 2ωt+ a3 cos 3ωt+ . . .
+ · · ·+ b1 cosωt+ b2 cos 2ωt+ b3 cos 3ωt+ . . .
De otro modo:
f(t) =n∑k=0
[ak cos(kωt) + bk sen(kωt)]

8.10. ANALISIS DE FOURIER DE MOVIMIENTOS PERIODICOS 229
Cada uno de los sumandos se denomina armonico o sobretono y los coeficientes ai y
bi pesan la importancia de cada uno. El teorema de Fourier demuestra que sus valores
son:
a0 =1
T
∫ T
0
f(t) dt; b0 = 0
(k > 0) ak =2
T
∫ T
0
f(t) cos(kωt) dt; bk = 2T
∫ T0f(t) sen(kωt) dt
Este teorema refuerza una vez mas la importancia del movimiento armonico simple,
pues un movimiento periodico cualquiera se puede siempre expresar como combinacion
de diversos MAS.
Esta descomposicion permite entender hechos importantes. Por ejemplo, distintos
instrumentos musicales pueden emitir la misma nota o tono (con una frecuencia de-
terminada) y, sin embargo, nosotros percibimos un timbre diferente para cada uno.
El mismo tono indica que el periodo que generan es igual en todos los instrumentos,
pero la forma de la onda se descompone en distintos armonicos porque cada uno la
genera con unas determinadas caracterısticas. Es decir, el analisis de Fourier de cada
instrumento es diferente. De hecho es posible generar sonidos haciendo una sıntesis de
Fourier que no es otra cosa que generar ondas armonicas electronicamente, con dis-
tintas amplitudes y frecuencias y combinarlas para conseguir un determinado sonido.
Este es el fundamento de los sintetizadores musicales utilizados actualmente.
El metodo de Fourier se puede utilizar para analizar funciones no periodicas. En
este caso es como si el periodo se extendiera desde −∞ hasta +∞. En este caso en
vez de analizar la curva en terminos de un espectro discreto de frecuencias (ω, 2ω, 3ω,
. . . ) se hace en terminos de un espectro continuo en el que la frecuencia puede tomar
cualquier valor. La amplitud correspondiente a cada frecuencia viene dada por una
funcion llamada transformada de Fourier.
Tambien es importante el analisis de Fourier en Geofısica, puesto que las carac-
terısticas espaciales de una anomalıa gravitatoria se pueden tambien descomponer y
analizar como suma de armonicos. En este caso la variable no es el tiempo sino la
posicion de la anomalıa, pero las ecuaciones anteriores se pueden aplicar exactamente
igual.

8.11. PROBLEMAS 231
8.11. Problemas
1. Un cuerpo de 3 kg de masa sujeto a un muelle oscila con una amplitud de 4
cm y un periodo de 2 s. a) ¿Cual es su energıa total?; b) ¿Cual es su velocidad
maxima?
(Respuestas : a) E = 2,37× 10−2 J; b) vmax = 0,13 m/s )
2. ¿Cual es el periodo de oscilacion de una regla de 1 m que puede girar alrededor
de uno de sus extremos?
(Respuestas : T = 1,64 s )
3. Un coche de 1200 kg se construye a partir de un chasis unido por cuatro amor-
tiguadores a las ruedas. Si cada amortiguador tiene una constante de fuerza de
20000 N/m, encuentrese el periodo y la frecuencia de vibracion cuando el au-
tomovil pasa por un bache llevando en su interior dos personas con una masa
conjunta de 160 kg.
(Respuestas : T = 0,85 s; f = 1,18 Hz )
4. Una partıcula de 10 g describe un M.A.S. en el eje x. La amplitud es 5 cm y cada
segundo efectua media vibracion. Calculense:
a) La ecuacion que rige el movimiento.
b) La fuerza que lo produce.
c) Los valores de la elongacion para los que sera maxima la velocidad.
d) Los valores de la elongacion para los que sera nula la aceleracion.
(Respuestas : a) x(t) = 5 cosπt; b) f = −mπ2x; c) x(vmax) = 0; d) x(a =
0) = 0)
5. El embolo de una maquina de vapor pesa 20 kg, siendo la longitud del cilindro
40 cm y suponemos que se mueve con un movimiento armonico simple a razon
de 120 rev/min . Determina:

232 CAPITULO 8. MOVIMIENTO OSCILATORIO
a) El tiempo que tarda en recorrer 10 cm a partir del momento en que pasa por
el centro del cilindro.
b) La energıa cinetica cuando pasa por el centro del cilindro.
c) El instante en que la aceleracion es maxima y su valor.
(Respuestas : a) t = 0,08 s; b) Ec = 63,2 J; c) amax = 31,6 m/s2; t = 0,25 s)
6. Un resorte espiral tiene una longitud de 15 cm. Cuando de el se cuelga una masa
de 50 g queda en reposo con una longitud de 17 cm. Calcula:
a) La constante de recuperacion del resorte.
b) La frecuencia de las oscilaciones verticales que se producen cuando se cuelga
una masa de 90 g.
c) El trabajo realizado por el resorte para elevar la masa de 90 g entre los extremos
de la trayectoria, si la distancia entre ellos es de 6 cm.
(Respuestas : a) k = 24,5 N/m; b) f = 2,63 Hz; c) W = 0,053 J)
7. Una masa de 250 g se encuentra sobre una mesa sin rozamiento sujeta por dos
muelles de constantes k1 = 30 N/m y k2 = 20 N/m. Calcula el periodo del
movimiento oscilatorio que realiza la masa cuando es sometida a una pequena
perturbacion.
(Respuestas : T = 0,42 s)
8. El pendulo de un reloj de pared esta constituido por una varilla homogenea de
1 m de longitud y masa m1 en cuyo extremo se encuentra un pequeno cilindro
macizo y homogeneo de masa tres veces mayor que la varilla. Calculese el radio
que debe tener este cilindro para que el reloj funcione con un periodo de 2 s.
(Respuestas : r = 5,11 cm)
9. Una partıcula describe una curva de Lissajous de ecuacion:
x = 2√
3 sen(π
2t)

8.11. PROBLEMAS 233
y = 2 sen(π
2t)
en el S.I.. Calculense el modulo de la velocidad en funcion del tiempo y el angulo
que esta forma con el eje de ascisas. ¿Cual sera su maxima velocidad?
(Respuestas : v(t) = 2π cos(π
2t)
; α = 30o; vmax = 2π m/s)
10. Calcula la tension en la cuerda de un pendulo simple en funcion del angulo que
forma la cuerda con la vertical.
(Respuestas : T = mg(3 cos θ − 2 cos θ0))
11. Un anillo de 10 cm de radio esta suspendido de una varilla de modo que puede
oscilar libremente. Determina su periodo de oscilacion.
(Respuestas : T = 0,90 s)
12. Obtengase la frecuencia de oscilacion correspondiente al potencial intermolecular:
U(x) = −ε0[2(x0
x
)6
−(x0
x
)12],
donde ε0 y x0 son constantes arbitrarias.
(Respuestas : ω =
(72ε0mx2
0
)1/2
)
13. Una masa de 20 kg de mercurio cae en el interior de un tubo en forma de U de
3 cm2 de seccion transversal. Calcula su periodo de oscilacion sabiendo que la
densidad del mercurio vale: ρ = 13, 6 g/cm3.
(Respuestas : T = 3,1 s)
14. Dos resortes identicos (k = 20 N/m) se encuentran conectados de la forma que
muestran las figuras a una masa de 300 g. Obtengase el periodo de oscilacion de
cada uno de los dos sistemas.
(Respuestas : a), b) T = 0,54 s)

234 CAPITULO 8. MOVIMIENTO OSCILATORIO
k k
m
a)
b)
k k
m
15. Un objeto de masa M conectado a un muelle de constante k oscila armonicamente
con amplitud A1. En el instante en que el objeto pasa por su posicion de equilibrio
se deja caer sobre el un trozo de plastilina de masa m que se adhiere a el.
a) Calcula la nueva amplitud y el nuevo periodo del movimiento.
b) Repıtase el apartado anterior en el caso en que la plastilina se deja caer en un
extremo de la trayectoria.
(Respuestas : a) A22 =
M
M +mA2
1; T2 = 2π
(M +m
k
)1/2
; b) A1 = A2; T2 =
2π
(M +m
k
)1/2
)
16. Desde una altura de 2 m se deja caer un cuerpo de 10 kg de masa sobre un plato de
una bascula de masa 10 kg . El muelle de la bascula tiene una constante elastica

8.11. PROBLEMAS 235
de 8 kg/cm. Suponiendo que despues del choque el plato y el cuerpo permanecen
unidos, calculense: a) el desplazamiento maximo del plato de la bascula y b) la
ecuacion del movimiento del conjunto cuerpo-plato.
(Respuestas : y2 = 0, 171 m; x = 0, 16 cos(19, 8t))
17. Por la garganta de una polea, cuya masa M puede considerarse concentrada en
su periferia, pasa un hilo inextensible y sin masa. De uno de los extremos del hilo
cuelga una masa m y el otro extremo del hilo esta atado a un resorte vertical
cuyo extremo esta fijo en el suelo. Calcula el periodo para pequenas oscilaciones
de m. Datos: M = 900 g; m = 150 g ; K = 1600 N/m.
(Respuestas : T = 0,16 s)


Capıtulo 9
Movimiento ondulatorio
9.1. Introduccion: conceptos basicos y tipos de on-
das
El movimiento ondulatorio puede considerarse como un transporte de energıa y
cantidad de movimiento de una region a otra del espacio sin que tenga lugar ningun
transporte neto de materia.
En cuanto al tipo de medio material en que se pueden propagar, podemos dividir
las ondas en dos grandes grupos:
} Ondas mecanicas : En este caso las ondas se originan mediante una perturbacion
en el espacio que se propaga a traves de un medio material debido a sus propieda-
des elasticas. Ejemplos de este tipo de ondas son las ondas sonoras (vibraciones
de las moleculas de aire que se transmiten de unas a otras), ondas en la superficie
de un estanque, ondas en una cuerda, ondas sısmicas, etc.
} Ondas electromagneticas : Estas ondas no necesitan de ningun medio material
para propagarse. Pueden hacerlo en el vacıo. La energıa y el momento son trans-
portados por campos electricos y magneticos que se propagan conjuntamente en
el espacio. Ejemplos de estas ondas son las ondas luminosas, las ondas de radio
o television, las ondas de telefonıa movil, los rayos X, etc.
Las ondas que se propagan en el espacio se denominan ondas viajeras . Sin embargo,
hay otro tipo de ondas (que estudiaremos mas adelante con detalle) que se denomi-
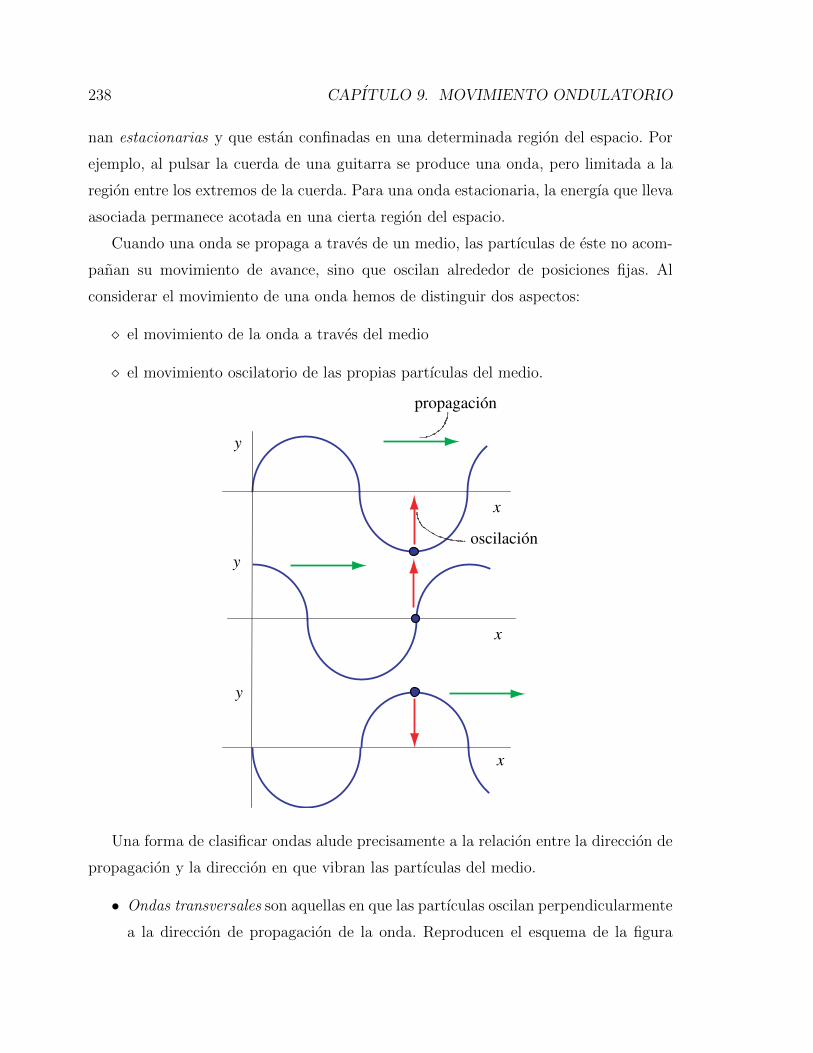
238 CAPITULO 9. MOVIMIENTO ONDULATORIO
nan estacionarias y que estan confinadas en una determinada region del espacio. Por
ejemplo, al pulsar la cuerda de una guitarra se produce una onda, pero limitada a la
region entre los extremos de la cuerda. Para una onda estacionaria, la energıa que lleva
asociada permanece acotada en una cierta region del espacio.
Cuando una onda se propaga a traves de un medio, las partıculas de este no acom-
panan su movimiento de avance, sino que oscilan alrededor de posiciones fijas. Al
considerar el movimiento de una onda hemos de distinguir dos aspectos:
� el movimiento de la onda a traves del medio
� el movimiento oscilatorio de las propias partıculas del medio.
x
x
x
y
y
y
propagación
oscilación
Una forma de clasificar ondas alude precisamente a la relacion entre la direccion de
propagacion y la direccion en que vibran las partıculas del medio.
• Ondas transversales son aquellas en que las partıculas oscilan perpendicularmente
a la direccion de propagacion de la onda. Reproducen el esquema de la figura
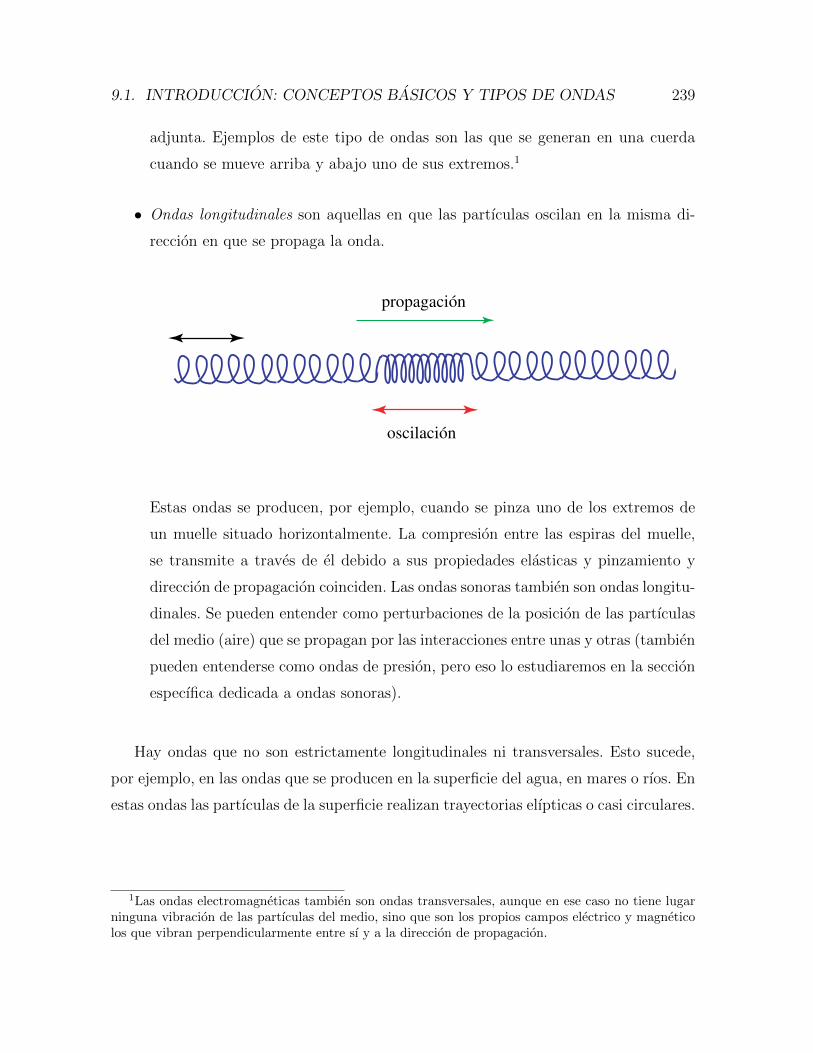
9.1. INTRODUCCION: CONCEPTOS BASICOS Y TIPOS DE ONDAS 239
adjunta. Ejemplos de este tipo de ondas son las que se generan en una cuerda
cuando se mueve arriba y abajo uno de sus extremos.1
• Ondas longitudinales son aquellas en que las partıculas oscilan en la misma di-
reccion en que se propaga la onda.
propagación
oscilación
Estas ondas se producen, por ejemplo, cuando se pinza uno de los extremos de
un muelle situado horizontalmente. La compresion entre las espiras del muelle,
se transmite a traves de el debido a sus propiedades elasticas y pinzamiento y
direccion de propagacion coinciden. Las ondas sonoras tambien son ondas longitu-
dinales. Se pueden entender como perturbaciones de la posicion de las partıculas
del medio (aire) que se propagan por las interacciones entre unas y otras (tambien
pueden entenderse como ondas de presion, pero eso lo estudiaremos en la seccion
especıfica dedicada a ondas sonoras).
Hay ondas que no son estrictamente longitudinales ni transversales. Esto sucede,
por ejemplo, en las ondas que se producen en la superficie del agua, en mares o rıos. En
estas ondas las partıculas de la superficie realizan trayectorias elıpticas o casi circulares.
1Las ondas electromagneticas tambien son ondas transversales, aunque en ese caso no tiene lugarninguna vibracion de las partıculas del medio, sino que son los propios campos electrico y magneticolos que vibran perpendicularmente entre sı y a la direccion de propagacion.

240 CAPITULO 9. MOVIMIENTO ONDULATORIO
propagación
oscilación
En este tema nos ocuparemos unicamente de ondas mecanicas. Estas ondas requie-
ren tres elementos basicos:
a) Alguna fuente que produzca la perturbacion.
b) Un medio que se pueda perturbar.
c) Un mecanismo fısico por el cual puntos adyacentes del medio interaccionen para
propagar la perturbacion.
Conceptos basicos en cualquier tipo de ondas:
∗ Longitud de onda: distancia entre dos puntos que en el mismo instante estan a la
misma distancia de su posicion de equilibrio (dicho de otro modo, distancia entre
dos puntos que vibran del mismo modo).
∗ Frecuencia: numero de vibraciones por unidad de tiempo de la perturbacion.
∗ Velocidad de propagacion: velocidad con que se transmite la perturbacion.
∗ Amplitud: maxima separacion de un punto respecto a su posicion de equilibrio.
9.2. Pulsos unidimensionales
Un pulso es una onda de extension relativamente corta, interesante desde el punto de
vista teorico porque permite visualizar el comportamiento generico de cualquier onda.
Matematicamente, un pulso se puede representar como una cierta funcion, y = f(x),
que se mueve con una cierta velocidad.

9.2. PULSOS UNIDIMENSIONALES 241
Por ejemplo, un pulso es el resultado de mover el extremo de una cuerda horizontal
(estando el otro extremo sujeto a un punto fijo) con fuerza arriba o abajo durante un
breve intervalo de tiempo.
propagación
9.2.1. Funcion de ondas
Si la forma de un pulso no cambia con el tiempo, respecto a un sistema de referencia
inercial, la curva f(x) se movera con la velocidad de propagacion del pulso, v. Es decir,
matematicamente un pulso que se desplaza hacia la derecha sera una funcion:
y = f(x− vt),
y si se mueve hacia la izquierda:
y = f(x+ vt).
La forma funcional f(x ± vt) se denomina funcion de ondas. De otro modo: y =
y(x, t) = f(x±vt). La velocidad con que se propaga la onda no debe confundirse con la
velocidad con que vibran las partıculas del medio. En concreto, la velocidad del pulso
se suele denominar velocidad de fase y se obtiene como:
v =dx
dt.

242 CAPITULO 9. MOVIMIENTO ONDULATORIO
y=f(x)
y
x
y=f(x')=f(x-vt)
y
x'
vt
O
y'
O'O
xx'
t = 0 t
9.2.2. Superposicion
Muchos fenomenos ondulatorios que se presentan en la Naturaleza no se pueden
describir en terminos de un unico pulso, sino como una combinacion de varios de ellos.
Para analizar que sucede si, por ejemplo, sobre una cuerda coinciden dos o mas pulsos
se postula el Principio de Superposicion:
Si dos o mas partıculas coinciden en la misma region del espacio, la funcion de
onda resultante es la suma algebraica de las funciones de ondas individuales.
Las ondas que obedecen este principio se denominan lineales. Nosotros nos ocupa-
remos unicamente de este tipo de ondas. Una consecuencia de este principio es que dos
ondas pueden pasar una sobre otra sin que se destruyan o alteren. La combinacion de
dos o mas ondas en la misma region del espacio se denomina interferencia. Puede ser
de tipo constructivo si las funciones de onda se suman, y = y1 + y2, o , si las funciones
tienen signos opuestos y se cancelan total o parcialmente, y = y1 − y2.

9.2. PULSOS UNIDIMENSIONALES 243
Interferencia constructiva
Interferencia destructiva

244 CAPITULO 9. MOVIMIENTO ONDULATORIO
9.2.3. Reflexion y transmision
Siempre que una onda viajera alcanza una frontera, se refleja. Consideremos el caso
de un pulso en una cuerda. Existen al menos dos posibilidades sencillas, que el extremo
donde se encuentra la frontera este libre o fijo.
pulso incidente
pulso reflejado
En el caso de extremo libre, el pulso reflejado se invierte respecto al inicial, mientras
que si el extremo esta fijo, el pulso incidente y el reflejado son del mismo signo pero
con velocidades opuestas.
Se produce una transmision de una onda entre dos medios, cuando la onda puede
pasar de un medio a otro y continuar su propagacion. En el caso de pulsos en cuerdas
un ejemplo es cuando dos cuerdas de distinto grosor estan unidas y un pulso pasa de
una a otra.
Como se observa en la figura, ademas de un pulso transmitido en el segundo medio,
existe tambien un pulso reflejado. Estos dos pulsos, transmitido y reflejado, tienen
menor amplitud que el incidente porque la energıa de este se reparte entre los dos.

9.2. PULSOS UNIDIMENSIONALES 245
pulso incidente
pulso reflejado
pulso transmitido
9.2.4. Velocidad de propagacion de las ondas unidimensiona-les
Una propiedad general de las ondas es que su velocidad depende de las propiedades
de medio, pero no de la velocidad de la fuente relativa al medio. Por ejemplo, la
velocidad de una onda en una cuerda depende unicamente de las propiedades de la
cuerda. Otro ejemplo es que la velocidad de las ondas sonoras que emite el silbato de
un tren depende solo de las propiedades del aire y no del movimiento del tren.
A continuacion demostraremos que la velocidad de las ondas en una cuerda depende
solo de la tension a que esta sometida y de su masa. Supongamos un pulso desplazando-
se por una cuerda. Consideraremos que su longitud es pequena en comparacion con la
longitud de la cuerda, lo que nos permitira trabajar con una tension unica en todos
los puntos de la cuerda (que ademas coincidira con la de la cuerda en ausencia de
pulsos). Tomaremos como sistema de referencia uno que se mueve con velocidad cons-
tante, v igual a la velocidad de propagacion del pulso. Es decir, que en este sistema
el pulso esta estacionario y la cuerda se mueve hacia la izquierda con velocidad, v. El
segmento de cuerda ∆s se esta moviendo entonces sobre una circunferencia de radio,
r, y experimenta una aceleracion centrıpeta, v2/r. Si la amplitud del pulso es suficien-
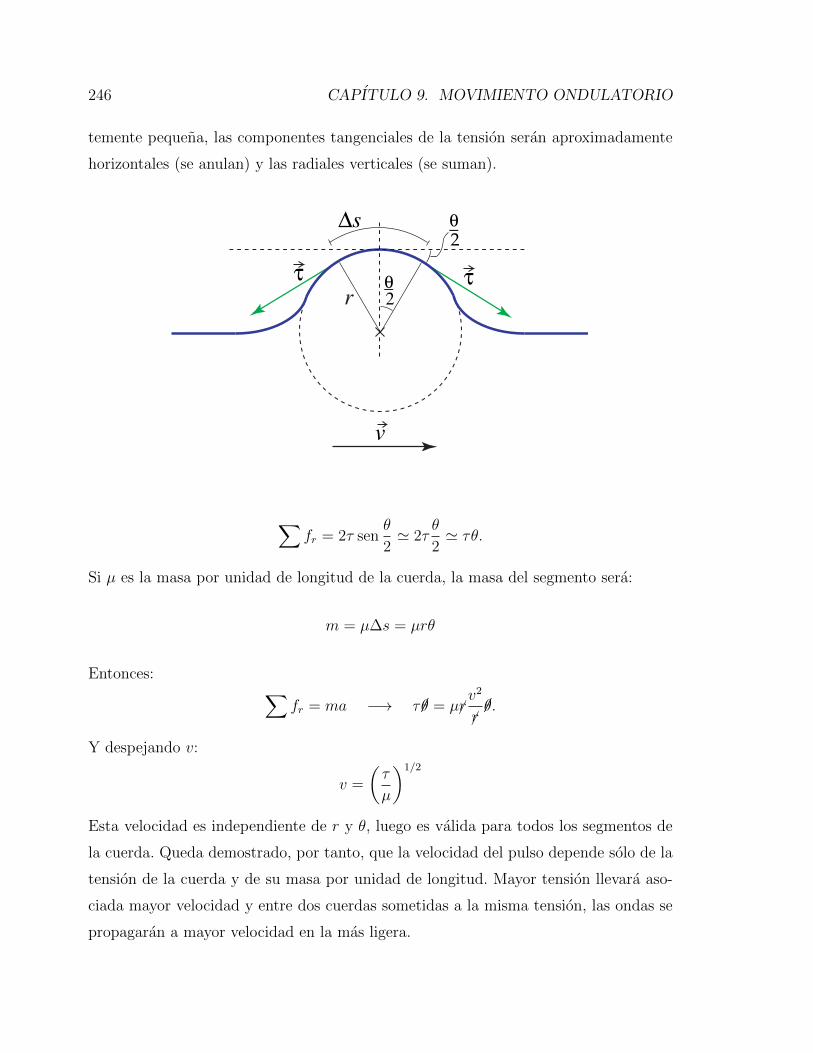
246 CAPITULO 9. MOVIMIENTO ONDULATORIO
temente pequena, las componentes tangenciales de la tension seran aproximadamente
horizontales (se anulan) y las radiales verticales (se suman).
θ_2
θ_2
ττ
∆s
v
r
∑fr = 2τ sen
θ
2' 2τ
θ
2' τθ.
Si µ es la masa por unidad de longitud de la cuerda, la masa del segmento sera:
m = µ∆s = µrθ
Entonces: ∑fr = ma −→ τ ��θ = µ�r
v2
�r��θ.
Y despejando v:
v =
(τ
µ
)1/2
Esta velocidad es independiente de r y θ, luego es valida para todos los segmentos de
la cuerda. Queda demostrado, por tanto, que la velocidad del pulso depende solo de la
tension de la cuerda y de su masa por unidad de longitud. Mayor tension llevara aso-
ciada mayor velocidad y entre dos cuerdas sometidas a la misma tension, las ondas se
propagaran a mayor velocidad en la mas ligera.
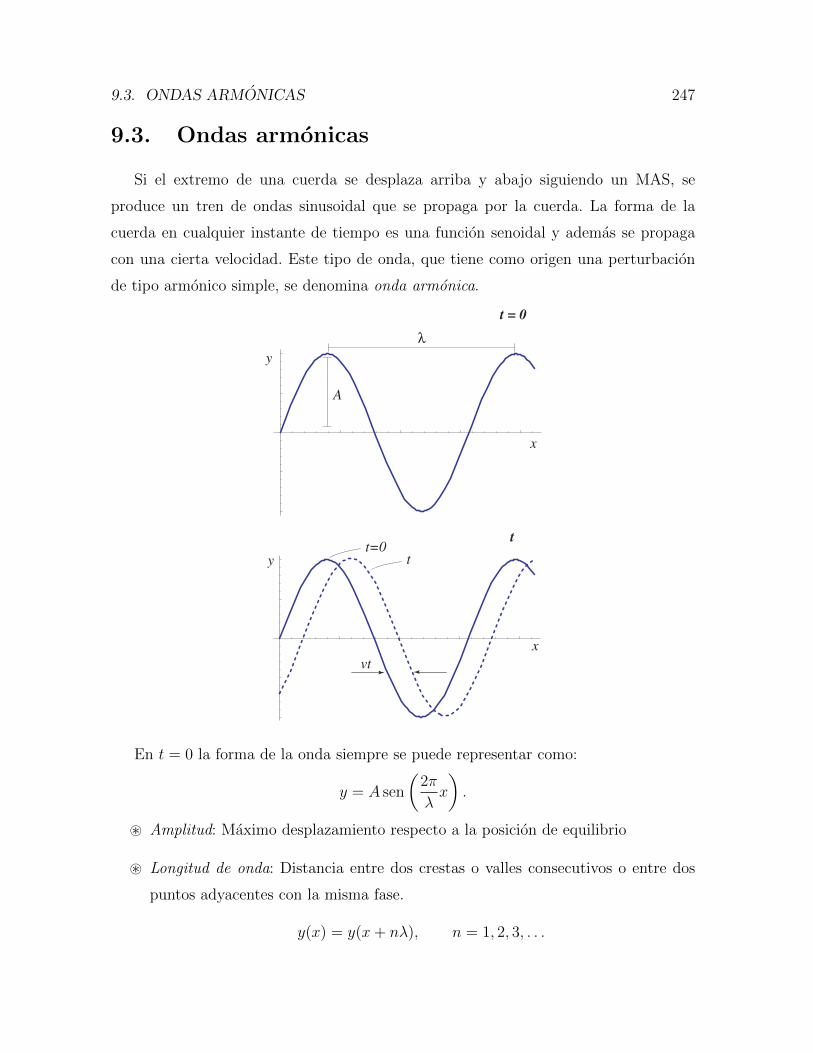
9.3. ONDAS ARMONICAS 247
9.3. Ondas armonicas
Si el extremo de una cuerda se desplaza arriba y abajo siguiendo un MAS, se
produce un tren de ondas sinusoidal que se propaga por la cuerda. La forma de la
cuerda en cualquier instante de tiempo es una funcion senoidal y ademas se propaga
con una cierta velocidad. Este tipo de onda, que tiene como origen una perturbacion
de tipo armonico simple, se denomina onda armonica.
y
x
t=0t
vt
y
x
λ
A
t = 0
t
En t = 0 la forma de la onda siempre se puede representar como:
y = A sen
(2π
λx
).
~ Amplitud: Maximo desplazamiento respecto a la posicion de equilibrio
~ Longitud de onda: Distancia entre dos crestas o valles consecutivos o entre dos
puntos adyacentes con la misma fase.
y(x) = y(x+ nλ), n = 1, 2, 3, . . .

248 CAPITULO 9. MOVIMIENTO ONDULATORIO
porque:
y(x+ nλ) = A sen
[2π
λ(x+ nλ)
]= A sen
(2πx
λ+ 2nπ
)= y(x).
Si la onda se desplaza hacia la derecha con velocidad v, en un tiempo t, posterior,
la funcion de onda sera:
y(x, t) = A sen
[2π
λ(x− vt)
].
Si la onda viaja hacia la izquierda, serıa:
y(x, t) = A sen
[2π
λ(x+ vt)
].
~ Periodo: El tiempo que tarda la onda en recorrer una distancia igual a λ se
denomina periodo:
v =λ
T.
Luego una manera alternativa de expresar la funcion de ondas es:
y(x, t) = A sen
[2π
(x
λ− t
T
)]Esta funcion muestra el caracter periodico de la onda: y tiene el mismo valor en las
posiciones x, x + λ, x + 2λ, x + 3λ . . . . Y para cualquier posicion dada, x, y toma el
mismo valor en los instantes: t, t+ 2T , t+ 3T , . . . Es decir, la periodicidad espacial la
determina λ y la temporal T . Matematicamente:
y(x, t) = y(x+ nλ, t) −→ λ periodicidad espacial
y(x, t) = y(x, t+ nT ) −→ T periodicidad temporal
Otras definiciones usuales son las siguientes:
k ≡ 2π
λ−→ numero de onda (1/m)
ω ≡ 2π
T−→ frecuencia angular (rad/s)
f ≡ 1
T−→ frecuencia (1/s=Hz) (herzio)

9.3. ONDAS ARMONICAS 249
En terminos de algunos de estos parametros:
y(x, t) = A sen(kx− ωt),
y la velocidad se puede expresar:
v =ω
kv = λf.
Las funciones de onda expuestas hasta ahora presuponen que en el instante inicial,
t = 0, x = 0 y el desplazamiento desde el equilibrio es nulo, y = 0. En general, esto
no tiene porque suceder. Para ello matematicamente se puede introducir un desfase
inicial, δ, de manera que la forma mas general de la funcion de ondas es:
y(x, t) = A sen(kx− ωt− δ).
El desfase inicial se determina a partir de las condiciones iniciales.
La velocidad con la que vibra un punto cualquiera del medio material en que se
transmite la onda y su aceleracion, se determinan derivando y(x, t) respecto al tiempo:
vy =∂y
∂t
)x=cte
= ωA cos(kx− ωt)
ay =∂2y
∂t2
)x=cte
= −ω2A sen(kx− ωt).
Los valores maximos son:
vy,max = ωA
ay,max = ω2A.
Una onda real no puede ser armonica, porque estas no tienen ni principio ni fin. Se
extienden hacia el infinito tanto en el espacio como en el tiempo. Las ondas reales, sin
embargo, estan limitadas espacial y temporalmente, pero una buena aproximacion es
suponer que se comportan como armonicas en cierta region. En las ondas reales suele
ser λ >> A y ademas su extension espacial es mucho mayor que λ. Este tipo de ondas
se denomina tren de ondas. Una onda armonica es una representacion idealizada de un
tren de ondas.
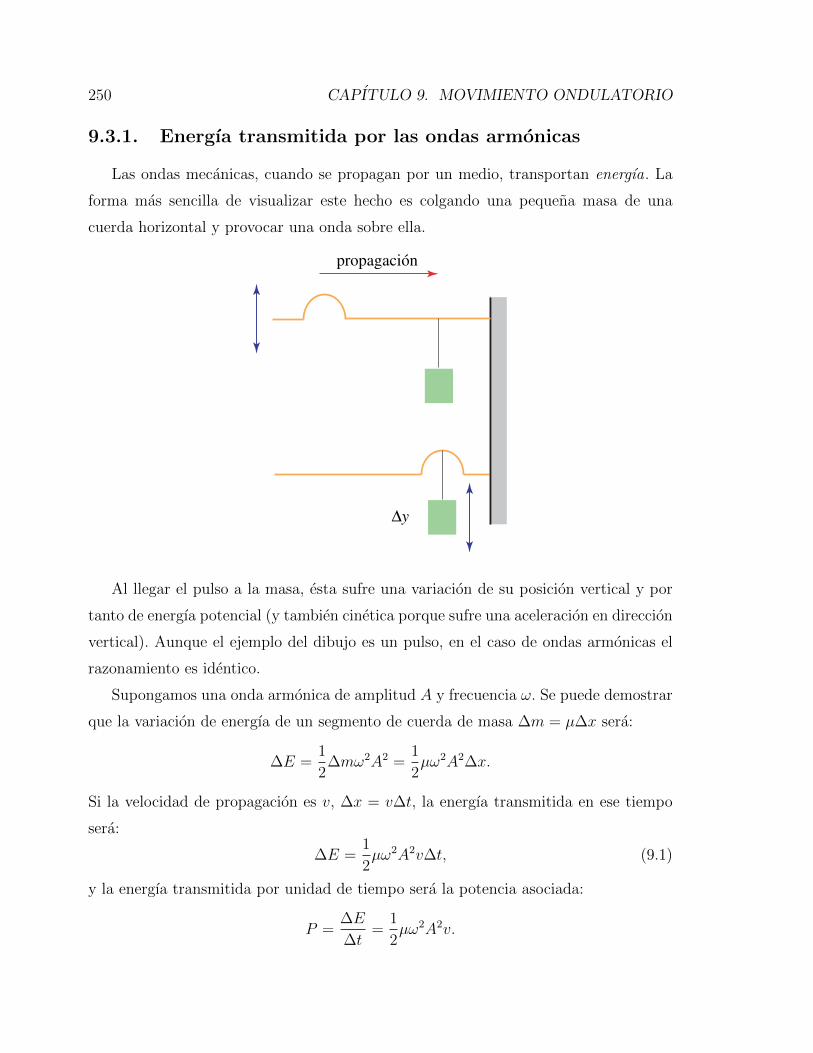
250 CAPITULO 9. MOVIMIENTO ONDULATORIO
9.3.1. Energıa transmitida por las ondas armonicas
Las ondas mecanicas, cuando se propagan por un medio, transportan energıa. La
forma mas sencilla de visualizar este hecho es colgando una pequena masa de una
cuerda horizontal y provocar una onda sobre ella.
propagación
∆y
Al llegar el pulso a la masa, esta sufre una variacion de su posicion vertical y por
tanto de energıa potencial (y tambien cinetica porque sufre una aceleracion en direccion
vertical). Aunque el ejemplo del dibujo es un pulso, en el caso de ondas armonicas el
razonamiento es identico.
Supongamos una onda armonica de amplitud A y frecuencia ω. Se puede demostrar
que la variacion de energıa de un segmento de cuerda de masa ∆m = µ∆x sera:
∆E =1
2∆mω2A2 =
1
2µω2A2∆x.
Si la velocidad de propagacion es v, ∆x = v∆t, la energıa transmitida en ese tiempo
sera:
∆E =1
2µω2A2v∆t, (9.1)
y la energıa transmitida por unidad de tiempo sera la potencia asociada:
P =∆E
∆t=
1
2µω2A2v.

9.3. ONDAS ARMONICAS 251
Luego, efectivamente, la propagacion de una onda conlleva una transmision de
energıa de un punto a otro del espacio sin que haya un transporte neto de materia.
9.3.1 Ejemplo
Una cuerda con una densidad lineal µ = 0,05 kg/m se encuentra sometida a una tension
de 80 N. ¿que potencia se le debe suministrar para generar en ella ondas armonicas de
frecuencia 60 Hz y amplitud 6 cm?
v =
(τ
µ
)1/2
ω = 2πf = 377 s−1
P =1
2µω2A2v =
1
25× 10−2 kg
��m377
1
s(6× 10−2)2 m2 40
��m
s= 512 W.
9.3.2. Interferencia de ondas armonicas
La superposicion de ondas se denomina en general interferencia. Consideremos dos
ondas armonicas que coinciden en la misma region del medio en que se propagan:
y1 = A sen(kx− ωt+ δ1)
y2 = A sen(kx− ωt+ δ2).
Suponemos que solo se diferencian en su fase, ∆δ = (kx− ωt+ δ2)− (kx− ωt+ δ1) =
δ2−δ1. Si δ2 = δ1, se dice que ambas estan en fase y si son distintas que estan desfasadas
en ∆δ. Para encontrar la onda resultante de la interferencia hacemos uso del principio
de superposicion:
y(x, t) = y1 + y2 = A [sen(kx− ωt+ δ1) + sen(kx− ωt+ δ2)] .
Si, por comodidad, tomamos δ1 = 0 y δ2 = ∆δ, entonces si las ondas estan en fase
δ = 0 y, en general, si estan desfasadas δ tendra un valor no nulo.

252 CAPITULO 9. MOVIMIENTO ONDULATORIO
y
xδ / k
A
y1
y2
i) δ = 0 (o δ = 2nπ con n = 0, 1, 2 . . . ).
y(x, t) = 2A sen(kx− ωt)
Este tipo de interferencia se denomina constructiva.
y
x
2A
y +1
y2
y2
y ,1
A
ii) δ = π [o δ = (2n+ 1)π con n = 0, 1, 2 . . . ].
y(x, t) = A sen(kx− ωt) + A sen(kx− ωt+ π) = 0
porque sen(π + α) = − senα.
Este tipo de interferencia se denomina destructiva.

9.3. ONDAS ARMONICAS 253
y
x
y +1
y2
y2
y 1
iii) Desfase δ.
En el caso general de un desfase δ arbitrario se puede utilizar la identidad:
senα + sen β = 2 sen
[1
2(α + β)
]cos
[1
2(α− β)
]. (9.2)
Tomando en nuestro caso α ≡ kx− ωt y β ≡ kx− ωt + δ, y teniendo en cuenta
que la funcion cos x es una funcion par, resulta:
y1 + y2 = 2A cos
(δ
2
)sen
(kx− ωt+
δ
2
).
Vemos entonces que la superposicion resulta ser otra onda armonica de igual
frecuencia y numero de ondas, pero con distinta amplitud [2A cos( δ2)] y fase inicial
(δ/2).
9.3.3. Ondas estacionarias
Cuando las ondas estan confinadas en una determinada region del espacio, como
las ondas en las cuerdas de un violın, se producen reflexiones en ambos extremos de
la cuerda, y por consiguiente, existen dos ondas moviendose en los dos sentidos que
se combinan de acuerdo con el principio de superposicion. Si se cumplen determinadas
condiciones esta interferencia da lugar a un tipo de onda que se denomina estacionaria.
Consideremos dos ondas armonicas identicas que viajan en sentidos opuestos:
y1(x, t) = A sen(kx− ωt) e y2(x, t) = A sen(kx+ ωt).
y(x, t) = y1 + y2 = A [sen(kx− ωt) + sen(kx+ ωt)] .

254 CAPITULO 9. MOVIMIENTO ONDULATORIO
Haciendo uso de la identidad (9.2) y llamando: α ≡ kx+ ωt; β ≡ kx− ωt, se obtiene:
y(x, t) = 2A cos(ωt) sen(kx).
Esta es la funcion de onda correspondiente a una onda estacionaria. Fısicamente re-
presenta una onda que no se desplaza en la direccion de propagacion, aunque todos los
puntos realizan un MAS con amplitud dependiente de la posicion [2A sen(kx)]. Esta
amplitud es maxima en las posiciones que verifican:
kxm =
(m+
1
2
)π −→ xm =
(m+
1
2
)λ
2donde m = 0, 1, 2 . . .
Estos maximos se denominan antinodos. Los mınimos o nodos se determinan a partir
de:
kx′m = mπ −→ x′m =mπ
k= m
λ
2.
Supongamos, por ejemplo, el caso de una cuerda sujeta por ambos extremos y de longi-
tud `. Si los extremos permanecen fijos deben ser dos nodos2. Es decir, las condiciones
de contorno serıan:
y(0, t) = y(`, t) = 0.
Como los nodos estan separados entre sı una semilongitud de onda, x′m − x′m−1 = λ/2,
debe haber un numero entero de nodos, n (con n > 1), entre los extremos:
nλn2
= ` −→ λn =2`
n.
En frecuencias:
fn =v
λn= n
v
2`.
Esta ecuacion se denomina condicion de onda estacionaria (para una cuerda de
extremos fijos) y significa que una onda estacionaria no puede tener una longitud
de onda (o frecuencia) cualquiera, sino que solo se producen a unas determinadas
frecuencias de resonancia. La mas baja recibe el nombre de frecuencia fundamental o
primer armonico. La siguiente segundo armonico y ası sucesivamente.
2En realidad, el extremo donde se genera la onda es un nodo solo aproximadamente, pues se debeagitar continuamente para evitar la atenuacion.
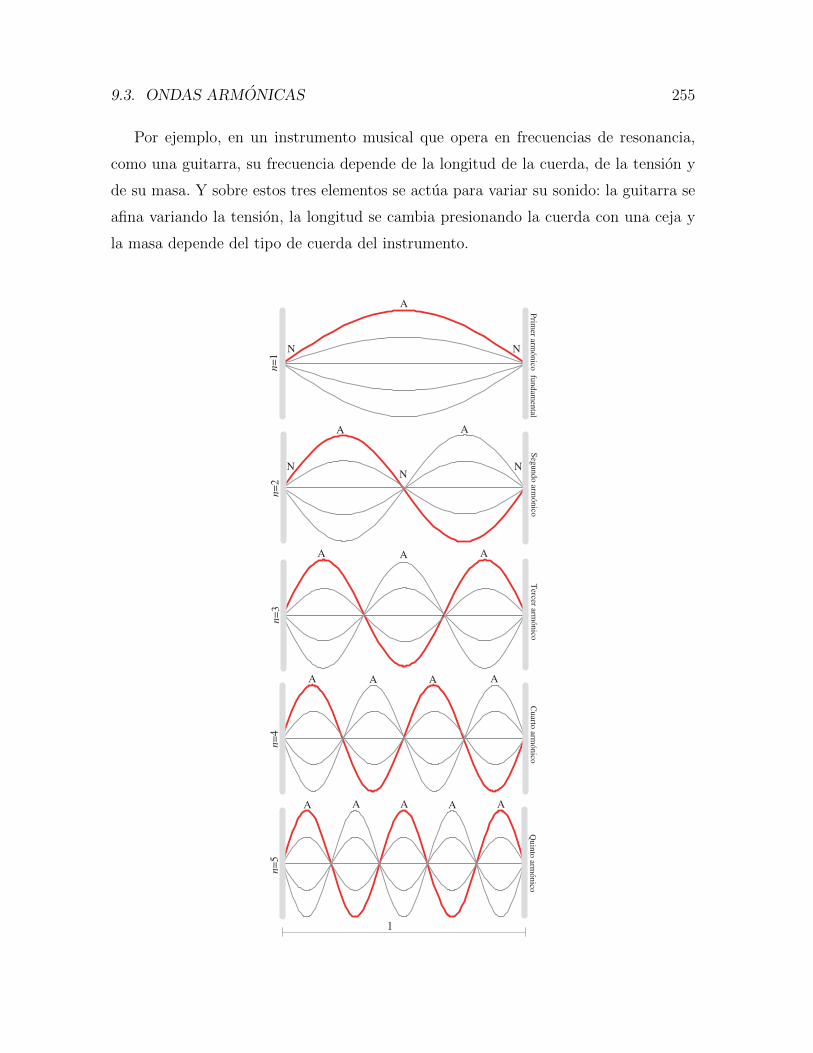
9.3. ONDAS ARMONICAS 255
Por ejemplo, en un instrumento musical que opera en frecuencias de resonancia,
como una guitarra, su frecuencia depende de la longitud de la cuerda, de la tension y
de su masa. Y sobre estos tres elementos se actua para variar su sonido: la guitarra se
afina variando la tension, la longitud se cambia presionando la cuerda con una ceja y
la masa depende del tipo de cuerda del instrumento.
n=
1n=
2n=
3n=
4n=
5
l
A
A A
A A A
A A A A
A A A A A
N N
NN
N
Prim
er armó
nico
fun
dam
ental
Seg
un
do
armó
nico
Tercer arm
ón
icoC
uarto
armó
nico
Qu
into
armó
nico

256 CAPITULO 9. MOVIMIENTO ONDULATORIO
9.4. Ecuacion de ondas
Una funcion de onda cualquiera, f(x − vt), es siempre solucion de una ecuacion
diferencial denominada ecuacion de ondas que puede deducirse a partir de las leyes de
Newton.
Supongamos un pequeno segmento de cuerda de masa µ∆x, longitud ∆x y que al
pasar a traves de el una onda se desplaza verticalmente formando un cierto angulo con
la horizontal. Supondremos ademas que la amplitud de la onda es pequena, de modo
que ese angulo sea tambien pequeno y comparable a su seno.
∆y
θ1
θ2
∆x
τ
τ
Si ~τ es la tension de la cuerda, la fuerza vertical neta sobre el elemento de cuerda
vale: ∑fy = τ sen θ2 − τ sen θ1
θ ↓↓ =⇒
{cos θ ' 1
sen θ ' θ−→ tan θ ' 0 −→
∑fy = τ(tan θ2 − tan θ1).
Como la tangente es igual a la pendiente de la curva en esos puntos:
S = tan θ =∂y
∂x=⇒
∑fy = τ(S2 − S1) = τ∆S.
Aplicando la segunda ley de Newton (f = ma):
τ∆S = µ∆x∂2y
∂t
2
=⇒ τ∆S
∆x= µ
∂2y
∂t2.

9.4. ECUACION DE ONDAS 257
Y en el lımite ∆x = 0,
lım∆x→0
∆S
∆x=∂S
∂x=
∂
∂x
∂y
∂x=∂2y
∂x2=⇒ ∂2y
∂x2=µ
τ
∂2y
∂t2.
Esta es la ecuacion de ondas para una cuerda con las hipotesis realizadas. Cualquier
onda en la cuerda debe tener una funcion de ondas que verifique esa identidad.
9.4.1 Ejemplo
Comprobaremos ahora, como ejemplo, que cualquier funcion f(x ∓ vt) satisface esa
ecuacion de ondas.
y = y(x∓ vt) ≡ y(α); y′ ≡ ∂y
∂α; y′′ =
∂2y
∂α2
~∂y
∂x=∂y
∂α
∂α
∂x= y′
∂α
∂x= y′ ~
∂2y
∂x2= y′′
~∂y
∂t=∂y
∂α
∂α
∂t= −v ∂y
∂α= −vy′ ~
∂2y
∂t2= −v∂y
′
∂t= −v∂y
′
∂α
∂α
∂t= v2y′′
=⇒ ∂2y
∂x2=
1
v2
∂2y
∂t2
Esta es la ecuacion de ondas que obtuvimos anteriormente haciendo, v = (τ/µ)1/2. Por
lo tanto, efectivamente esa es la velocidad de propagacion de una onda en una cuerda.
9.4.2 Ejemplo
Demuestrese que una onda armonica es solucion de la ecuacion de ondas y obtengase
su velocidad.
y(x, t) = A sen(kx− ωt)
� ∂y
∂x= Ak cos(kx− ωt) � ∂y
∂t= Aω cos(kx− ωt)
� ∂2y
∂x2= −Ak2 sen(kx− ωt) � ∂2y
∂t2= −Aω2 sen(kx− ωt)
−→ ∂2y
∂x2=
1
v2
∂2y
∂t2−→ −��Ak2
(((((((sen(kx− ωt) = − 1
v2��Aω2(((
((((sen(kx− ωt)
=⇒ v =ω
k,
que es la velocidad de una onda armonica en terminos de la frecuencia angular y el
numero de ondas.

258 CAPITULO 9. MOVIMIENTO ONDULATORIO
9.5. Ondas en tres dimensiones
Hasta ahora hemos estudiado unicamente ondas unidimensionales. Sin embargo, en
una cubeta llena de agua se producen ondas bidimensionales al agitar la superficie
del agua. En este caso, la longitud de la onda es la distancia entre dos crestas de las
ondas sucesivas. Estas ondas se visualizan en forma de circunferencias concentricas
denominadas frente de ondas.
λ
En el caso de las ondas de sonido, que se propagan en el espacio tridimensional, los
frentes de ondas son superficies que se alejan del foco emisor. Estos frentes de onda
pueden ser esfericos y su movimiento se puede indicar trazando rayos, que son lıneas
perpendiculares al frente de ondas y que pasan por el foco emisor. Si el foco es puntual
y el medio uniforme, cualquier onda emitida es esferica.
foco
frentes
rayos
Ondas esféricas Ondas planas
Cuando se observan los frentes de onda desde un punto muy alejado del foco emisor,
son planos. Se suelen denominar ondas planas.

9.5. ONDAS EN TRES DIMENSIONES 259
Si un foco puntual emite ondas uniformemente en todas direcciones, la energıa a
una distancia r estara distribuida uniformemente sobre una superficie esferica de radio
r. Se denomina intensidad a la potencia media por unidad de area que esta incidiendo
perpendicularmente a la direccion de propagacion. Para ondas esfericas:
I =PmS
=Pm
4πr2(W/m2)
Esta definicion asume implıcitamente que el medio no atenua las ondas y que las ondas
emitidas por la fuente se propagan uniformemente en todas las direcciones.
Como la energıa de una onda es proporcional al cuadrado de su amplitud3:
I1
I2
=r2
2
r21
∝ A21
A22
−→ A22r
22 ∝ A2
1r21.
Esto quiere decir que la amplitud de una onda esferica tridimensional debe decrecer
con r. La funcion de ondas de una onda esferica armonica se puede escribir entonces
como:
Ψ(r, t) =s0
rsen(kr − ωt),
donde s0 es una constante. Si la onda es plana y se propaga segun el eje x:
Ψ(x, t) = s0 sen(kx− ωt).
9.5.1. Propagacion de ondas en el espacio
La forma mas sencilla de entender la propagacion de ondas mecanicas en el espacio
es a traves del denominado Principio de Huygens :
Cada partıcula puntual de un medio material al que llega una perturbacion se con-
vierte en una fuente puntual secundaria de ondas que emite ondas esfericas secundarias
que alcanzan la siguiente capa de partıculas del medio.
3De otro modo: I ∝ 1/r2, por la denificion de intensidad y ademas, I ∝ A2, por serlo la energıa deuna onda armonica. En consecuencia, A ∝ 1/r.

260 CAPITULO 9. MOVIMIENTO ONDULATORIO
A
A'
A''
...
B
B'
B''
...
C
C'
C''
...
D
D'
D''
...
...
Cuando la onda alcanza las partıculas A, B, C . . . , se ponen a vibrar y actuan como
fuentes puntuales de ondas secundarias, cuya envolvente representa la propagacion del
frente inicial. Una consecuencia importante del Principio de Huygens es que en un
medio isotropo y homogeneo, donde la velocidad de la onda es la misma en todos los
puntos y en todas las direcciones, las superficies de onda se mantienen paralelas durante
la propagacion.
Mediante el principio de Huygens se pueden entender, al menos fenomenologicamen-
te, algunas de las propiedades de las ondas en su propagacion en el espacio: reflexion,
refraccion y difraccion.

9.5. ONDAS EN TRES DIMENSIONES 261
Para considerar la reflexion y la refraccion supongamos el caso mas sencillo de una
onda plana que separa dos medios donde la velocidad de propagacion de la onda es
diferente. Sean ~ui, ~ur y ~uR los vectores unitarios que indican la direccion de propagacion
de las ondas incidente, reflejada y refractada, y θi, θr y θR, los angulos que forman los
respectivos rayos con la vertical.
ui
ur
uR
θi
θr
θR
1
2
La reflexion se debe a la interferencia de la onda incidente con la onda secundaria que
se genera en la superficie que separa los dos medios. La refraccion se debe al cambio
de velocidad de la onda en el segundo medio. Experimentalmente se ha concluido que
las leyes que gobiernan la reflexion y la refraccion son las siguientes:
1. Las direcciones, ~ui, ~ur y ~uR, se encuentran en el mismo plano.
2. θi = θr.
3. Ley de Snell.sen θisen θR
= cte. =vivR.

262 CAPITULO 9. MOVIMIENTO ONDULATORIO
Otro fenomeno caracterıstico del movimiento ondulatorio es la difraccion. Se produce
cuando una onda encuentra obstaculos o aberturas en su camino de dimensiones simi-
lares a su longitud de onda. Experimentalmente se comprueba que las ondas sonoras
rodean las aberturas o que las ondas superficiales en un lıquido rodean los obstaculos.
Para entender en que consiste, en el siguiente diagrama se representan las diferencias
entre el efecto de un haz de partıculas que atraviesa un orificio o una onda haciendo lo
mismo.
Haz de partículas
(sin difracción)
Onda esférica
a) Haz de partıculas : las partıculas transmitidas estan confinadas en un angulo pe-
queno.
b) Frente de ondas esferico: como los puntos de la abertura se comportan como
focos secundarios, en el segundo medio se produce una onda esferica en un angulo
mucho mas amplio que en el caso del haz de partıculas.
Cuando la abertura es grande en comparacion con la longitud de ondas, entonces
los frentes de ondas no se deforman y solo cerca de los bordes de la abertura se observa
difraccion.
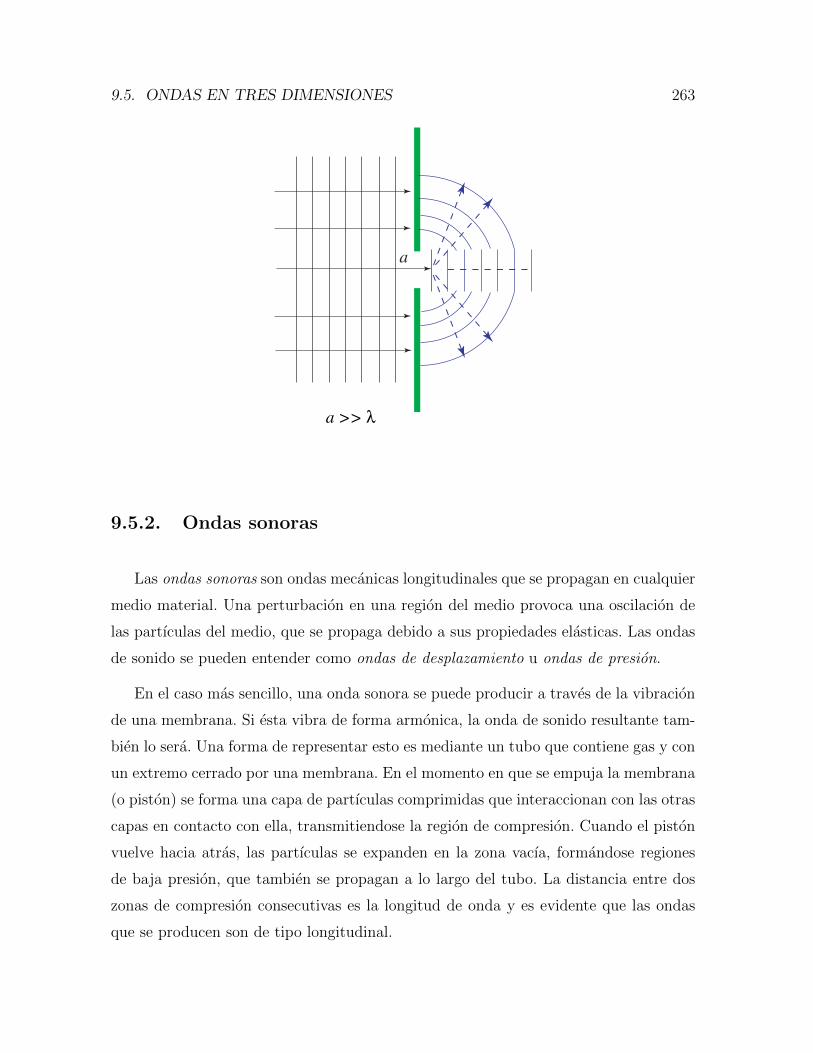
9.5. ONDAS EN TRES DIMENSIONES 263
a >> λ
a
9.5.2. Ondas sonoras
Las ondas sonoras son ondas mecanicas longitudinales que se propagan en cualquier
medio material. Una perturbacion en una region del medio provoca una oscilacion de
las partıculas del medio, que se propaga debido a sus propiedades elasticas. Las ondas
de sonido se pueden entender como ondas de desplazamiento u ondas de presion.
En el caso mas sencillo, una onda sonora se puede producir a traves de la vibracion
de una membrana. Si esta vibra de forma armonica, la onda de sonido resultante tam-
bien lo sera. Una forma de representar esto es mediante un tubo que contiene gas y con
un extremo cerrado por una membrana. En el momento en que se empuja la membrana
(o piston) se forma una capa de partıculas comprimidas que interaccionan con las otras
capas en contacto con ella, transmitiendose la region de compresion. Cuando el piston
vuelve hacia atras, las partıculas se expanden en la zona vacıa, formandose regiones
de baja presion, que tambien se propagan a lo largo del tubo. La distancia entre dos
zonas de compresion consecutivas es la longitud de onda y es evidente que las ondas
que se producen son de tipo longitudinal.

264 CAPITULO 9. MOVIMIENTO ONDULATORIO
λ
Si el piston se mueve armonicamente, el desplazamiento de un pequeno volumen
respecto a su posicion de equilibrio sera:
s(x, t) = sm sen(kx− ωt).
Veremos ahora otra manera alternativa de comprender las ondas armonicas, como ondas
de presion. Supongamos una capa de anchura ∆x, que en un instante, t0, se desplaza
respecto al equilibrio. Sea K el modulo de compresibilidad del gas (que definimos en el
tema de elasticidad):
K = −V0∆P
∆V=⇒ ∆P = −K
V0
∆V.

9.5. ONDAS EN TRES DIMENSIONES 265
donde ∆V es el volumen de la masa de gas que se comprime.
s2
s1
x2
x1 ∆x
Si A es la seccion del piston, ∆V = A∆s, con ∆s = s(x2, t0)− s(x1, t0).
∆P = −K��A∆s
��A∆x= −K∆s
∆xporque V = A∆x
Si ∆x→ 0:∆s
∆x−→ ∂s
∂x=⇒ ∆P = −K ∂s
∂x
s = sm sen(kx− ωt) −→ ∆P = −Ksmk cos(kx− ωt) ≡ ∆Pm cos(kx− ωt).
Si arbitrariamente tomamos la presion en equilibrio como 0, se obtiene:
P = Pm cos(kx− ωt) = Pm sen(kx− ωt+
π
2
)Luego efectivamente la onda de presion asociada a la de desplazamiento es tambien
armonica y tiene las mismas caracterısticas, salvo la fase, en la que hay un desplaza-
miento π/2.
Aunque no lo demostraremos, la velocidad de este tipo de ondas se puede expresar
como:
v =
(K
ρ
)1/2
.
Esta velocidad, depende, por tanto, de las caracterısticas del medio y de sus condiciones
termodinamicas. En la tabla adjunta se resumen los ordenes de magnitud de la velocidad
del sonido en solidos, lıquidos y gases.

266 CAPITULO 9. MOVIMIENTO ONDULATORIO
Medio Velocidad (m/s)
Gases Aire (10o C) 331Aire (20o C) 343Helio (0o C) 972
Lıquidos Alcohol (25o C) 1143Agua (25o C) 1493
Agua de mar (25o C) 1533
Solidos Cobre 3560Aluminio 5100
Acero 5130
La intensidad de las ondas sonoras suele representarse en escala logarıtmica, debido
al amplio rango de intensidades que puede detectar el oıdo humano. Se define el nivel
de intensidad sonoro como4:
β = 10 log
(I
I0
)En esta escala la intensidad se mide en unidades de decibelio (dB). I0 es una intensidad
de referencia, que se toma como el umbral de audicion, I0 = 10−12 W/m2. En esta
escala β(I0) = 0 y el umbral de dolor, Id, suele corresponder en promedio a 1 W/m2,
que en decibelios vale 120 dB.
I0 = 10−12 W
m2−→ β(I0) = 0
Id = 1W
m2−→ β(Id) = 120 dB.
Las variaciones de presion que corresponden a estas intensidades extremas varıan
entre 3 × 10−5 Pa (umbral de audicion) hasta 30 Pa para el umbral de dolor. Tenien-
do en cuenta que la presion atmosferica promedio es 1, 013 × 105 Pa, son valores de
presion realmente pequenos. La tabla adjunta resume los niveles sonoros de algunas
perturbaciones acusticas habituales.
Intervalo de frecuencias que es capaz de percibir un oıdo humano medio: 20 −→20000 Hz.
4log representa logaritmo decimal.

9.5. ONDAS EN TRES DIMENSIONES 267
Fuente I/I0 dB
Respiracion 100 0 Umbral de audicionConversacion en voz baja (5 m) 102 20 Escasamente audible
Conversacion normal (1 m) 106 60Trafico denso 107 70 Ruidoso
Cataratas del Niagara 109 90 Mucho tiempo dana al oıdoConcierto rock (altavoces a 2 m) 1012 120 Umbral de dolorAvion reactor (a poca distancia) 1015 150


9.6. PROBLEMAS 269
9.6. Problemas
1. Una cuerda se tensa colgando una masa de 3 kg en uno de sus extremos. Si
su longitud es 2,5 m y su masa 50 g, ¿cual es la velocidad de las ondas que se
propagan sobre ella?
(Respuestas : v = 38,3 m/s)
2. La funcion de ondas de una onda armonica que se propaga a traves de una cuerda
es,
y(x, t) = 0,03 sen(2,2x− 3,5t)
en el S.I.. Determina su amplitud, longitud de onda, frecuencia angular, frecuen-
cia, periodo, numero de ondas y velocidad de propagacion.
(Respuestas : A = 0,03 m; λ = 2,9 m; ω = 3,5 rad/s; f = 0,55 Hz; T = 1,8
s; k = 2,2 m−1; v = 1,6 m/s)
3. Una cuerda de 3 m de longitud y densidad lineal 2,5×10−3 kg/m3 esta sujeta por
ambos extremos. Una de sus frecuencias de resonancia es 252 Hz y la siguiente
336 Hz. Hallese la frecuencia fundamental y la tension de la cuerda.
(Respuestas : f1 = 84 Hz; T = 635 N)
4. Demuestra que la ecuacion de ondas es lineal, es decir, que si y1(x, t) y y2(x, t)
son soluciones de la ecuacion, cualquier combinacion lineal suya tambien lo es.
5. Una fuente emite ondas con una potencia de salida de 80 W. Si se supone que es
puntual, calculese la intensidad a una distancia de 3 m de la fuente y la distancia
a la que el sonido se reduce a un nivel de 40 dB.
(Respuestas : I = 10−8 W/m2; r = 25,2 km)
6. Calcula la relacion entre las frecuencias de los sonidos fundamentales emitidos
por dos hilos de la misma longitud, igual seccion y sometidas a identica tension si
uno de ellos es de acero (ρa = 7,7 g/cm3) y el otro de plata (ρAg = 10,5 g/cm3).
(Respuestas : fa/fAg = 1,17)

270 CAPITULO 9. MOVIMIENTO ONDULATORIO
7. Determina la velocidad del sonido en el agua sabiendo que si se incrementa en
1 atm la presion sobre un cierto volumen, disminuye 50 millonesimas sobre el
inicial.
(Respuestas : v = 1423,4 m/s)
8. Determina la ecuacion de una onda armonica que se propaga en el sentido nega-
tivo del eje x con una velocidad de 900 m/s, siendo su frecuencia 400 Hz y 0,02
m su amplitud. Se sabe ademas que en t = 0, el punto x = 0 se encuentra a 0,02
m de su posicion de equilibrio.
(Respuestas : y(x, t) = 0,02 cos(2,8x+ 2,5× 103 t) (S.I.))
9. Dos ondas de igual frecuencia y amplitud (f = 50 Hz, A = 2 cm) viajan a
una velocidad de 1 m/s en el sentido positivo del eje x y entre ellas existe una
diferencia de fase de π/3. Deduzcase la ecuacion de la onda resultante de la
interferencia entre las dos y las ecuaciones de movimiento de una partıcula que
se encuentra a 20 cm del origen de coordenadas.
(Respuestas : y(x, t) = 2A cos(π/6) sen(
314x− 314 t+π
6
)(S.I.);
y(x0, t) = 2A cos(π/6) sen(
314x0 − 314 t+π
6
))
10. La luz se propaga en el vacıo con una velocidad c = 3×108 m/s. Hallese la longitud
de onda correspondiente a la frecuencia de 5× 104 Hz, que es la frecuencia de la
luz roja del espectro visible.
(Respuestas : λ = 6,0× 10−7 m)
11. Considerese un pajaro que emite un sonido de potencia constante, ¿cuantos dB
disminuira el nivel de intensidad del sonido si nos alejamos el doble de la distancia
inicial al pajaro?
(Respuestas : β2 − β1 = −6,0 dB)
12. Una persona deja caer una piedra desde un puente elevado y oye que choca
(justamente debajo de el) 4 s despues.

9.6. PROBLEMAS 271
a) Estima la altura del puente respecto al rıo despreciando el tiempo que tarda
el sonido en recorrer esa distancia.
b) Mejora esa estimacion incluyendo la velocidad finita del sonido.
(Respuestas : a) h = 78,5 m; b) h = 70,5 m)
13. Demuestra explıcitamente que las siguientes funciones satisfacen la ecuacion de
ondas unidimensional:
a)
y(x, t) = (x+ vt)3
b)
y(x, t) = Aei(kx−ωt)
c)
y(x, t) = log[k(x+ vt)]
14. En una cuerda real siempre se produce una perdida de energıa a medida que una
onda se propaga por ella. Esta posibilidad se puede expresar matematicamente a
traves de una funcion de ondas cuya amplitud depende de la posicion:
y = A(x) sen(kx− ωt) = A0e−bx sen(kx− ωt).
a) ¿Cual es la energıa transportada por la onda en x = 0?
b) ¿Y cual es la energıa transportada en un punto x cualquiera?
(Respuestas : a) P (x = 0) =1
2µω2A2
0v; P (x) =1
2µω2A2
0e−2bxv)
15. Una onda armonica se propaga con velocidad de 10 m/s a traves de una cuerda
de densidad 0,01 kg/m. La amplitud de la onda es 0,5 mm.
a) ¿Que energıa en promedio transmite la onda si su frecuencia son 400 Hz?
b) ¿Como se puede aumentar la energıa transportada?
(Respuestas : a) P = 0,079 W; b) P =1
2ω2A2(µT )1/2. La potencia aumen-
tara mas rapidamente aumentando ω o A porque depende de esos parametros
cuadraticamente.)

272 CAPITULO 9. MOVIMIENTO ONDULATORIO
16. A tiempo t = 0, la forma de un pulso generado sobre una cuerda viene dada por:
y(x) =a
b+ x2,
donde a = 0,12 m3 y b = 4,0 m2.
a) Representa graficamente el pulso en ese instante.
b) ¿Cual es su funcion de ondas, y(x, t), si se desplaza en el sentido positivo del
eje x con velocidad de 10 m/s?
c) ¿Y si el pulso se mueve con la misma velocidad, pero en el sentido negativo
del eje x?
(Respuestas : b) y(x, t) =0,12
4 + (x− 10 t)2(S.I.); c) y(x, t) =
0,12
4 + (x+ 10 t)2
(S.I.))
17. Una cuerda de una guitarra tiene una longitud de 60 cm. Su frecuencia funda-
mental es de 247 Hz.
a) ¿Cual es la velocidad de propagacion de las ondas en la cuerda?
b) Si la densidad de la cuerda es 0,01 g/cm, ¿cual es su tension?
(Respuestas : a) v = 296,4 m/s; b) T = 87,9 N)
18. Una onda estacionaria en una cuerda esta representada por la siguiente funcion
de ondas,
y(x, t) = 0,02 sen(πx
2
)cos(40πt)
donde todos los parametros se representan en el S.I.
a) Escribe las ecuaciones de las dos ondas que interfieren para generar la onda
estacionaria.
b) ¿Cual es la distancia entre los nodos de la onda estacionaria?
c) ¿Cual es la velocidad con que vibra un punto de la cuerda situado a 1 m del
origen?
d) ¿Cual es la aceleracion de la cuerda en x = 1 m?

9.6. PROBLEMAS 273
(Respuestas : a) y1(x, t) = 0,01 sen(π
2x− 40π t
)(S.I.); y2(x, t) = 0,01 sen
(π2x+ 40π t
)(S.I.) ; b) λ/2 = 2 m; c) vy(x = 1, t) = −0,8π sen(40π t) m/s; d) ay(x =
1, t) = −3,2π2 cos(40π t) m/s2)


Parte III
Fundamentos de Termodinamica


Capıtulo 10
Introduccion a la Termodinamica
Es usual identificar la Termodinamica como aquella rama de la Fısica en la que se
estudian los fenomenos relacionados con el calor y la temperatura. En realidad, una
definicion de Termodinamica deberıa contemplar los principios en que se basa, sus fines
y metodos y su campo de aplicacion. Este capıtulo esta destinado justamente a precisar
algunos de estos aspectos de una manera muy breve.
10.1. Conceptos basicos
10.1.1. Sistemas termodinamicos
Por sistema termodinamico entendemos una region cualquiera del espacio con su
contenido. La descripcion de un sistema se puede hacer, en general, de dos formas:
macroscopica y microscopica.
La descripcion macroscopica se refiere a las propiedades a gran escala del siste-
ma, sin hacer hipotesis sobre la estructura de la materia. Las magnitudes fısicas
utilizadas en esta descripcion suelen ser: a) reducidas en numero, b) sugeridas
por los sentidos y c) medibles directamente.
En la descripcion microscopica se analizan las propiedades a pequena escala del
sistema, haciendo hipotesis o modelos sobre la estructura de la materia. Las
magnitudes que entran en juego son: a) un numero muy elevado, b) no vienen
sugeridas por nuestros sentidos y c) no se pueden medir de forma directa.
278 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
La Termodinamica es un ejemplo de teorıa macroscopica. En ella se hace enfasis en
aquellas magnitudes macroscopicas que tienen relacion con aspectos internos al sistema.
Estas magnitudes se denominan magnitudes termodinamicas . Por tanto, son aquellas
que describen macroscopicamente el estado interno de un sistema. Como para todo
sistema fısico, la definicion de un sistema termodinamico requiere precisar su extension
espacial. Esto, a su vez, exige precisar sin ambiguedad la superficie geometrica que lo
delimita, que recibe el nombre de frontera o contorno, que puede ser real o imaginaria.
La region fuera de la frontera se suele llamar medio exterior o entorno y el sistema
total formado por el sistema en estudio y su medio exterior, universo termodinamico .
Los sistemas termodinamicos, respecto a la naturaleza de sus fronteras, se pueden
clasificar del siguiente modo:
Sistema aislado: sistema con fronteras que impiden el intercambio de materia y
energıa con su medio exterior.
Sistema cerrado: sistema con fronteras que permiten el intercambio de energıa
con su medio exterior, pero impiden el de materia.
Sistema abierto: sistema con fronteras que permiten el intercambio tanto de
energıa como de materia con su medio exterior.
Se entiende por componentes de un sistema termodinamico a las diferentes especies
quımicas independientes que lo forman. Los sistemas pueden ser monocomponentes
o multicomponentes . Se llama fase a un sistema fısicamente homogeneo, es decir, un
sistema cuyas propiedades son invariantes bajo traslaciones del sistema de referencia.
10.1.2. Interacciones termodinamicas
Experimentalmente se observa que dos o mas sistemas termodinamicos pueden in-
teraccionar. Esta interaccion se pone de manifiesto al observarse que cambios en los
valores de las magnitudes termodinamicas en uno de ellos provocan inequıvocamente
cambios en las magnitudes termodinamicas de los otros. Tipos basicos de interaccion:

10.1. CONCEPTOS BASICOS 279
Interaccion mecanica: caracterizada por un intercambio de energıa mecanica (se
puede describir totalmente en terminos de conceptos provenientes de la Mecani-
ca).
Interaccion termica: caracterizada por un intercambio de energıa termica.
Interaccion material : caracterizada por un intercambio de materia y/o por un
cambio de composicion debido a la existencia de reacciones quımicas. Esta inter-
accion siempre va acompanada de interacciones termica y mecanica.
Se denomina pared a aquel ente conceptual mediante el que se permite o impide el
establecimiento de interacciones entre sistemas. Se dice que la pared es adiabatica si im-
pide la interaccion termica. Una buena aproximacion a una pared adiabatica es la que
constituye un aislante termico como la madera, la lana, etc. Una pared diatermica,
como una pared metalica por ejemplo, es aquella que permite la interaccion termi-
ca. Se denominan ligaduras termodinamicas al conjunto de paredes que impiden las
interacciones termodinamicas y pueden ser externas si son restrictivas respecto a la
interaccion de un sistema con su medio exterior o internas si son restrictivas respecto
a la interaccion entre subsistemas.
10.1.3. Estados de equilibrio
Se denomina estado de un sistema al conjunto de valores de las magnitudes ter-
modinamicas que lo caracterizan. Experimentalmente se han constatado los siguientes
hechos:
Al interaccionar dos sistemas se modifican, en general, los valores de sus magni-
tudes termodinamicas.
Todo sistema aislado llega a tener fijos los valores de sus magnitudes termo-
dinamicas.
Se dice que dos sistemas han alcanzado un estado de equilibrio mutuo respecto a
una cierta interaccion cuando, estando en contacto con una pared permisiva a dicha

280 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
interaccion, sus magnitudes termodinamicas tienen valores constantes en el tiempo. Se
pueden distinguir tantos tipos de equilibrio como de interacciones: equilibrio mecanico,
equilibrio termico y equilibrio material. Un sistema se dice que esta en equilibrio termo-
dinamico si se cumplen simultaneamente los equilibrios mecanico, termico y material,
tanto externos como internos. Dicho de otro modo, cuando sus magnitudes termo-
dinamicas permanecen invariables en el tiempo si no se modifican las paredes y si al
aislarlo no se producen cambios.
10.1.4. Variables termodinamicas
Se denominan variables termodinamicas a aquellas magnitudes termodinamicas aso-
ciadas a un sistema en equilibrio termodinamico. Segun su procedencia pueden ser de
tres tipos:
Variables de composicion: especifican la cantidad de cada uno de los componentes.
Por ejemplo, la masa de cada uno o el numero de moles.
Variables mecanicas : son aquellas que proceden de una interaccion mecanica,
como presion, volumen, pero tambien aquellas que proceden de otras ramas de la
Fısica como el Electromagnetismo (intensidad del campo electrico o magnetico,
etc.).
Variables termicas : son las que surgen de los postulados propios de la Termo-
dinamica o combinaciones de estas con variables mecanicas.
Las variables pueden ser extensivas o intensivas . Las extensivas son globales, es
decir, dependen del tamano del sistema y son aditivas. Ejemplos son el volumen, la
masa, el numero de moles, etc. Las variables intensivas son locales (estan definidas en
cada parte del sistema y son, por lo tanto, independientes de su tamano) y no son aditi-
vas, como por ejemplo, la temperatura, la presion, etc. Las variables extensivas pueden
convertirse en especıficas cuando se establecen por unidad de masa o molares cuando
se expresan por unidad de mol. Las variables especıficas y molares son intensivas.
La experiencia muestra que no todas las variables termodinamicas son indepen-
dientes entre sı y, ademas, que las variables de dos sistemas en equilibrio mutuo estan
10.2. TEMPERATURA 281
relacionadas entre sı. La primera idea nos lleva al concepto de variables de estado, que
es el conjunto de variables termodinamicas independientes en terminos de las cuales se
pueden especificar todas las demas. Se denominas funciones de estado a las variables
que no se consideran independientes sino que son funcion de las variables de estado y
que tienen un valor unico en cada estado de equilibrio. Se denomina sistema simple
a un sistema cerrado que necesita unicamente dos variables como variables de estado.
Por ejemplo, si las variables son la presion, P , y el volumen, V , se dice que el sistema
es hidrostatico.
10.1.5. Procesos termodinamicos
Un proceso termodinamico es el camino que conecta dos estados termodinamicos
diferentes. Si el estado inicial y final estan infinitesimalmente proximos se dice que el
cambio de estado es infinitesimal y cualquiera de los caminos que los une es un proceso
infinitesimal . Si los estados inicial y final coinciden se dice que el proceso es cıclico.
Un proceso se dice que es cuasiestatico no disipativo o reversible cuando es secuencia
continua de estados de equilibrio. Son procesos ideales de modo que al invertirlos y
regresar al estado inicial, tanto el sistema como el resto del universo vuelven a sus
respectivos estados de partida sin ningun cambio. Se denomina proceso irreversible a
todo aquel que no es reversible. Cualquier proceso real es irreversible. En algunos tipos
de procesos alguna variable permanece constante: isotermo, temperatura constante;
isobaro, presion constante; isocoro, volumen constante, etc.
10.2. Temperatura
10.2.1. Equilibrio termico. Principio Cero
En Termodinamica la temperatura es un concepto esencial, y su medida constituye
una de sus principales actividades practicas. Pero su definicion correcta es complicada.
Si consideramos un trozo de aluminio y otro de madera en una misma habitacion,
ambos estan en equilibrio termico, pero, sin embargo, al tocarlos, el de aluminio se
siente mas frıo. Luego la sensacion fisiologica frıo/caliente no puede dar una base solida
para fundamentar el concepto de temperatura.

282 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
Suponganse dos bloques de un mismo metal, que inicialmente, al tacto, estan uno
mas caliente que el otro. Si los ponemos en contacto en un recinto aislado tiene lugar
una interaccion termica entre ellos. Al cabo de un tiempo ambos bloques producen la
misma sensacion al tacto. Se dice que han alcanzado un estado de equilibrio comun que
hemos denominado antes equilibrio termico. El Principio Cero de la Termodinamica
se formula, con una base experimental, del siguiente modo:
1. Dos sistemas en contacto a traves de una pared diatermica un tiempo suficiente
alcanzan el equilibrio termico.
2. Dos sistemas en equilibrio termico con un tercero se encuentran en equilibrio
termico entre sı.
Este principio permite introducir el concepto de temperatura empırica, θ, como
aquella propiedad que tienen en comun todos los sistemas que se encuentran en equili-
brio termico entre sı. El conjunto de estados que tienen la misma temperatura empırica
se denomina isoterma. Establecer valores numericos a las distintas isotermas se denomi-
na establecer una escala termometrica y conlleva elegir un termometro y una variable
termometrica, X, es decir, escoger la variable que va a cambiar con la temperatura,
θ = θ(X).
10.2.2. Escala de temperaturas del gas ideal
Es un hecho comprobado experimentalmente que todos los gases a baja presion
presentan un comportamiento muy similar. Por ello se utiliza el termometro de gas a
volumen constante como un sistema termometrico independiente del gas elegido. La
figura adjunta esquematiza este termometro. El volumen del gas se mantiene constante
ajustando el mercurio con el tubo en forma de U de manera que se encuentre siempre
en el mismo punto de la rama en contacto con el gas. La presion se mide entonces a
partir de la diferencia de altura h entre las dos ramas, P = Pa + ρgh y es la variable
termometrica.

10.2. TEMPERATURA 283
GAS
h
Pa
Hg
Tubo
flexible
La escala de temperaturas del gas ideal se elige a partir de la siguiente ecuacion:
θg.i.(P ) = 273,16 lımPpta→0
P
Ppta
donde Ppta es la presion del gas cuando el termometro se encuentre en equilibrio termico
con un sistema a la temperatura del punto triple del agua (aquel estado en que coexisten
las fases solida, lıquida y gaseosa). Experimentalmente se observa que el cociente P/Ppta
cuando la cantidad de gas es muy pequena es independiente del tipo de gas.
Ppta
θgas 1
gas 2
gas 3
gas 4
(g.i.)θ
Sin embargo, la forma mas universal de definir una escala de temperaturas surge a
partir del Segundo Principio de la Termodinamica, es la escala absoluta de temperaturas

284 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
y en ella la temperatura del punto triple del agua vale Tpta = 273,16 K. Esta escala
tambien se denomina Kelvin y es la unidad de temperatura en el S.I.
Existe otra escala muy utilizada habitualmente que es la Celsius que se define como:
t(oC) ≡ T (K)− 273,15
donde 273,15 es la temperatura de fusion del hielo a la presion de 1,013 bar. Observese
que la escala Kelvin y la Celsius no son iguales pero sus incrementos sı, es decir,
∆t(oC) = ∆T (K).
El Principio Cero permite introducir la temperatura y demuestra que para sistemas
hidrostaticos en equilibrio termodinamico debe existir entre las variables P , V y T
una relacion funcional del tipo: f(P, V, T ) = 0 que se denomina ecuacion empırica
de estado. La determinacion de una ecuacion concreta para un sistema particular no
es objeto en sı de la Termodinamica, si no que se obtiene experimentalmente en el
laboratorio o por medio de metodos microscopicos (Fısica Estadıstica).
10.2.3. Gas ideal
El quımico ingles Robert Boyle (1627-1691) puso de manifiesto experimentalmente
en 1660 que para gases a alta temperatura y/o baja presion se verifica que a tempera-
tura constante:
PV = constante (a T constante)
Tiempo despues (1802) el fısico y quımico frances Joseph Louis Gay-Lussac (1778-
1850) comprobo que en las mismas condiciones, si se mantiene constante la presion, el
volumen varıa de forma proporcionalmente inversa a la temperatura:
T/V = constante (a P constante)
Estas dos ecuaciones se pueden combinar en otra: PV = CT . Se comprobo tambien
que la constante C es proporcional al numero de moles de gas, n, y se puede expresar
ası, C = nR donde:
R ≈ 8,314J
mol.K≈ 0,082
atm.l
mol.K≈ 1,987
cal
mol.K

10.2. TEMPERATURA 285
es la constante universal de los gases . Y se puede entonces escribir:
PV = nRT
Esta ecuacion se denomina ecuacion de estado del gas ideal , da buenos resultados para
gases reales a bajas presiones y/o bajas densidades y altas temperaturas. Notese que
es independiente del tipo de gas que se considere.
P (atm)
H
N
CO
O
2
2
2
PV
nT
___
[J/(mol.K)]
8,314
10 20 30 40
10.2.1 Ejemplo
¿Que volumen ocupa 1,0 mol de gas ideal a una temperatura de 0,0oC y una presion de
1,0 atm.
A partir de la ecuacion de estado del gas ideal:
V =nRT
P=
(1,0 mol)[0,082 (atm.l)/(mol.K)](273,15 K)
1,0 atm= 22,4 l
10.2.2 Ejemplo
Un gas tiene un volumen de 2,0 l, una temperatura de 30oC y una presion de 1,0 atm.
Se calienta a 60o y al mismo tiempo se comprime hasta un volumen de 1,5 l. ¿Cual es
su nueva presion?
Como la cantidad de gas es constante,
P1V1
T1
=P2V2
T2
286 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
Despejando P2,
P2 =V1T2
T1V2
P1
Poniendo las temperaturas en K resulta, P2 = 1,47 atm.
10.3. Primer Principio
10.3.1. Trabajo termodinamico
El concepto de trabajo proviene originalmente de la Mecanica. Se define el trabajo
mecanico infinitesimal que la fuerza ~f hace para desplazar una partıcula un trayecto
d~ como:
δW = ~f.d~
donde δ significa que, en general, el trabajo depende de la trayectoria elegida y no solo
de los estados inicial y final.
En Termodinamica se define el trabajo termodinamico en un proceso dado como el
trabajo realizado por las fuerzas que durante el proceso los alrededores ejercen sobre
el sistema, ~Fext. De este modo:
δW > 0 si es realizado sobre el sistema
δW < 0 si es realizado por el sistema
Se dice que el criterio de signos utilizado es un criterio egoısta.
El objetivo ahora sera tratar de expresar el trabajo termodinamico en un proceso en
funcion de las variables macroscopicas propias de la Termodinamica. Supondremos un
proceso infinitesimal tal que los estados inicial y final estan muy proximos y los estados
intermedios son de equilibrio. Consideraremos ademas unicamente sistemas cerrados,
sin intercambio de materia.
Comencemos como ejemplo con un gas contenido en un sistema cilindro-piston. La
fuerza que ejerce el gas sobre el piston sera ~F = PA~i, o de otro modo, la fuerza que el
piston ejerce sobre el gas es ~Fext = −PA~i, entonces
δW = ~Fext.d~x = −PAdx = −PdV

10.3. PRIMER PRINCIPIO 287
siendo dV la variacion infinitesimal del volumen del cilindro. De este modo hemos
expresado el trabajo en terminos de una variable macroscopica intensiva (P ) y otra
extensiva (V ). Si el trabajo es de expansion, dV > 0 −→ δW < 0 (realizado por el
sistema) y si es de compresion, dV < 0 −→ δW > 0 (realizado sobre el sistema).
F
P
>
ext
Compresión
dx>
F
P
x
>
ext
Expansión
dx>
dV<0
δW>0
dV>0
δW<0
Siguiendo un proceso analogo se ha podido constatar que en todo sistema termo-
dinamico existen unas variables extensivas, (X1, X2 . . . Xn) y otras intensivas (Y1, Y2 . . . Yn)
de modo que el trabajo termodinamico siempre se puede expresar como:
δW =n∑i=1
Yi dXi
Las variables {Xi} se denominan coordenadas de trabajo y las {Yi} variables conjugadas .
El numero de variables depende del tipo de sistema. Si unicamente hay una coordenada
de trabajo se dice que el sistema es simple. Y si esas variables son P y V se dice que
el sistema es expansivo. La notacion δ indica que el trabajo no se puede expresar
directamente como la variacion de una coordenada termodinamica, sino que depende

288 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
del camino recorrido. Se dice que es una diferencial inexacta. En un proceso finito,
Wc =
∫c
δW
10.3.2. Trabajo disipativo y procesos cuasiestaticos
Ademas del trabajo asociado a la variacion de las coordenadas de trabajo siempre es
posible ejercer otro tipo de trabajo. Por ejemplo, la figura adjunta representa una polea
de la que cuelga una masa y esta conectada a unas paletas en el interior de un fluido.
Este trabajo no esta directamente asociado a la variacion de ninguna coordenada de
trabajo. Aparece en fenomenos de rozamiento, histeresis, etc. En un sistema expansivo
simple, el trabajo total se puede expresar ası:
δW = −PdV + δWdis
Pex
m
Se define un proceso cuasiestatico como aquella sucesion de procesos infinitesimales
en los que no se realiza trabajo disipativo. Es decir, son procesos donde los estados
intermedios son de equilibrio y donde el trabajo termodinamico siempre esta asociado
a la variacion de alguna coordenada de trabajo.
Wc =
∫c
δW =
∫c
n∑i=1
Yi dXi

10.3. PRIMER PRINCIPIO 289
10.3.3. Interpretacion geometrica del trabajo cuasiestatico
En el espacio termodinamico de un sistema cualquiera solo pueden representar-
se mediante curvas los procesos cuasiestaticos, en que los estados intermedios son de
equilibrio. En el caso de un sistema expansivo simple, el espacio P−V se denomina dia-
grama de Clapeyron. El trabajo en un proceso cualquiera representa el area encerrada
bajo la curva correspondiente (salvo signos):
W = −∫ f
c i
P dV = −∫ f
c i
f(V ) dV
Un proceso es cıclico si los estados inicial y final coinciden.
Pf
Pi
VfVi
P
V
i
f
|W|
10.3.1 Ejemplo
Calculense los trabajos necesarios para expandir el sistema desde i hasta f a lo largo
de los tres caminos senalados, geometricamente y calculando las integrales correspon-
dientes.

290 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
(1)
(3)
(2)
2P0
P0
2V0V0
P
V
i
f
Geometricamente:
(1) −→ W1 = −2P0V0 + 0
(2) −→ W2 = −P0V0
(3) −→ W3 = −3
2P0V0
Integrales1:
(1) −→ W1 = −∫ 2V0
V0
P dV = −2P0V0
(2) −→ W2 = 0−∫ 2V0
V0
P0 dV = −P0V0
(3) −→ W3 = −∫ 2V0
V0
P dV = −∫ 2V0
V0
(−P0
V0
V + 3P0
)dV = −3
2P0V0
10.3.2 Ejemplo
Considerese un proceso por el que un gas ideal pasa de un estado inicial i a otro final f .
Calcula el trabajo termodinamico si el proceso es: a) isobaro, b) isocoro y c) isotermo.
1Ecuacion de la recta que pasa por los puntos (x1, y1) y (x2, y2):
x− x1x2 − x1
=y − y1y2 − y1
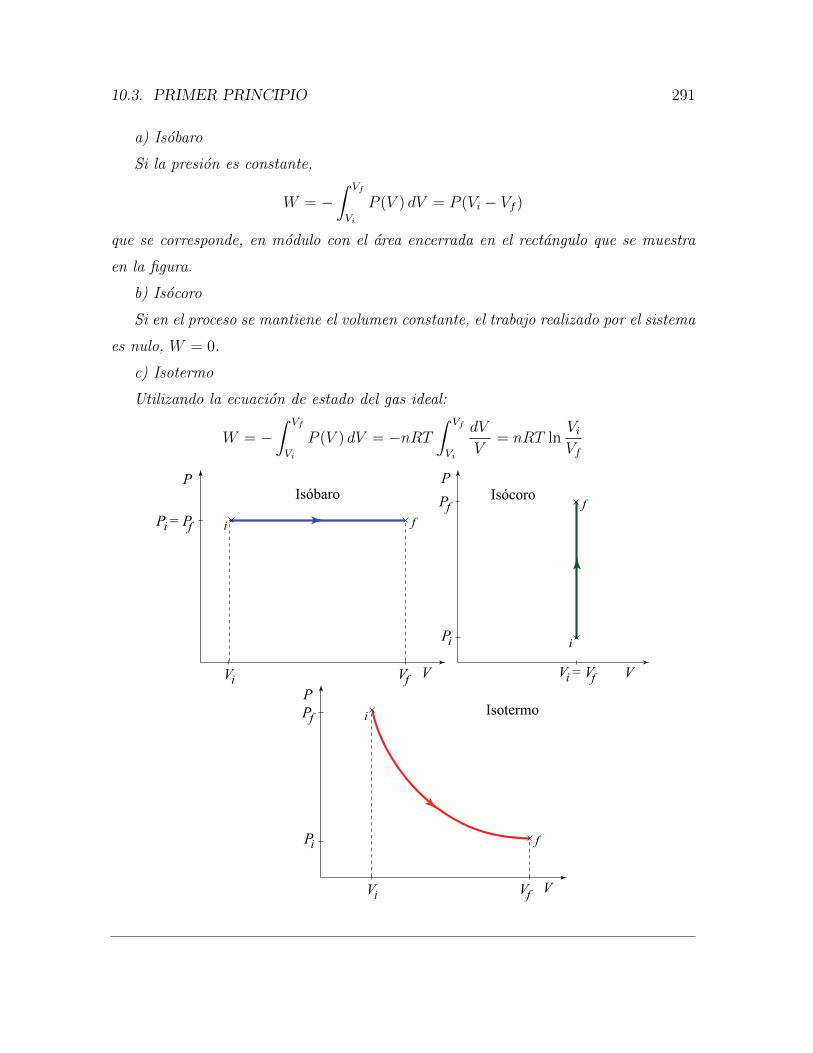
10.3. PRIMER PRINCIPIO 291
a) Isobaro
Si la presion es constante,
W = −∫ Vf
Vi
P (V ) dV = P (Vi − Vf )
que se corresponde, en modulo con el area encerrada en el rectangulo que se muestra
en la figura.
b) Isocoro
Si en el proceso se mantiene el volumen constante, el trabajo realizado por el sistema
es nulo, W = 0.
c) Isotermo
Utilizando la ecuacion de estado del gas ideal:
W = −∫ Vf
Vi
P (V ) dV = −nRT∫ Vf
Vi
dV
V= nRT ln
ViVf
Isóbaro
P = Pi
VfVi
P
V
f
Isócoro
P
VV = Vi f
Pf
Pi
i f
i
f
Pf
Pi
VfVi
P
V
Isotermoi
f

292 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
10.3.4. Experimentos de Joule
Entre 1840 y 1845 el fısico ingles J.P. Joule realizo una serie de experimentos in-
tentando establecer la cantidad de trabajo requerido para producir un determinado
incremento de la temperatura en una masa conocida de agua. En la figura adjunta se
esquematizan algunos de los experimentos. En ellos un recipiente de paredes adiabaticas
(la temperatura en el interior no esta correlacionada con la del exterior) contiene un
lıquido sobre el que se efectua un trabajo, bien con unas paletas conectadas a una polea
(Wad = mgh) o directamente un trabajo electrico con una resistencia (Wad = V It).
m
R
A
V
Joule demostro que, en condiciones adiabaticas, para pasar de un mismo estado
inicial al mismo estado final se requiere la misma cantidad de trabajo, independien-
temente de las particularidades del proceso. Obtuvo ademas que la relacion entre el
trabajo ejercido y el calor2 requerido viene dado por:
|W adif | = J |Qif |
La constante J se denomino equivalente mecanico del calor y Joule obtuvo para ella
un valor muy similar al aceptado hoy en dıa: J = 4,186 J/cal.
10.3.5. Trabajo adiabatico y energıa interna
Los resultados experimentales de Joule se pueden generalizar de forma empırica en
los siguientes postulados:
2Aunque mas adelante analizaremos la definicion rigurosa de calor, considerese aquı en el sentidoclasico, hasta el s. XVIII, segun el cual el calor es la forma de energıa capaz de elevar la temperaturade un cuerpo.

10.3. PRIMER PRINCIPIO 293
i) Dados dos estados de equilibrio cualquiera, de un sistema cerrado, siempre es
posible alcanzar uno a partir del otro a traves de un proceso adiabatico.
ii) El trabajo que se requiere para llevar un sistema rodeado de paredes adiabaticas
desde un estado inicial a otro final depende unicamente de dichos estados.
Matematicamente, estos postulados llevan a que, cuando i y f son dos estados de un
sistema conectados mediante un proceso adiabatico, existe una funcion termodinamica
(que llamaremos energıa interna) tal que3,
W adif = Uf − Ui = ∆U
Como el trabajo necesario para pasar de un estado a otro depende del tamano del
sistema (masa, numero de moles, etc.), la energıa interna es una funcion de estado
extensiva. Se puede expresar siempre en terminos de las variables independientes del
sistema.
10.3.6. Calor y Primer Principio de la Termodinamica
Hemos visto que para un sistema cerrado cualquiera es posible pasar de un estado
inicial a otro final realizando un trabajo adiabatico, W adif . Se puede comprobar tambien
experimentalmente que el trabajo necesario para alcanzar f desde i no es el mismo
que si la pared es diaterma, Wif . Se define el calor absorbido por el sistema como la
diferencia entre ambos trabajos, es decir,
Qif = W adif −Wif = ∆U −Wif
O expresado de otro modo,
∆U = Q+W
Esta expresion se conoce como Primer Principio de la Termodinamica: las sumas de
las cantidades de energıa comunicadas a un sistema cerrado en forma de calor y de
trabajo es igual a la variacion de su energıa interna.
3Este razonamiento es analogo en Mecanica al concepto de energıa potencial para fuerzas conser-vativas, aunque en Mecanica hace falta hacer la hipotesis de que las interacciones entre partıculas sonconservativas y en Termodinamica no es necesario ninguna hipotesis microscopica.

294 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
Puesto que Wif no solo depende de los estados, si no del camino recorrido y U
es una funcion de estado, Qif depende del camino, no es una funcion de estado.
En forma infinitesimal es una diferencial inexacta, δQ.
Si en un proceso solo hay interaccion mecanica, Qif = 0 −→ ∆U = Wif .
Si solo hay interaccion termica, Wif = 0 −→ ∆U = Qif .
Si Q > 0 el sistema absorbe calor y si Q < 0, lo cede al exterior.
Expresiones del Primer Principio para procesos infinitesimales (cuasiestaticos):
dU =δQ+ δW
dU =δQ+n∑i=1
Yi dXi
dU =δQ− PdV (Para un sistema hidrostatico simple)
En un proceso cıclico, i = f , por lo tanto, ∆U = 0.
En un sistema aislado, U = cte., puesto que Q = 0 y W = 0.
10.3.3 Ejemplo
Supongamos un sistema Σ, aislado del exterior y dividido en dos subsistemas, ΣA y ΣB,
inicialmente a temperaturas diferentes, T iA y T iB, y separados por una pared adiabatica y
rıgida. En determinado momento la pared adiabatica se transforma en diaterma de mo-
do que se permite el contacto termico entre ambos. Veremos cual es el calor transferido
de uno a otro subsistema durante el proceso.
Σ
ΣA ΣB
TAi TB
i
Σ
ΣA ΣB
TAf
TBf

10.3. PRIMER PRINCIPIO 295
Considerando primero como sistema solo ΣA, UAf − UA
i = QAif .
Y si el sistema es solo ΣB, UBf − UB
i = QBif .
Para el sistema total, Σ: (UAf +UB
f )− (UAi +UB
i ) = 0 por estar el sistema aislado.
Entonces, comparando las ecuaciones debe ser,
QAif = −QB
if
Esta ecuacion se denomina ecuacion fundamental de la calorimetrıa. Cuando dos sis-
temas se ponen en contacto termico, el calor absorbido por uno es igual al cedido por
el otro.
10.3.7. Capacidades calorıficas
Cuando un sistema absorbe o cede calor a lo largo de un proceso pueden ocurrir dos
cosas: 1) que varıe su temperatura, o 2) que tenga lugar una transicion de fase man-
teniendose la temperatura constante. En el primer caso, la variacion de temperatura
asociada a una cierta transferencia de calor se mide con un coeficiente termodinamico
denominado capacidad calorıfica:
CX =
(δQ
dT
)X
donde el subındice X indica que la variacion de calor esta asociada al proceso X. En
el SI se expresa en J/K, aunque tambien es usual expresarlo en cal/K (1 J= 0,24 cal).
Las capacidades calorıficas son magnitudes extensivas. En sustancias puras se pueden
expresar por mol, cX = CX/n, denominandose capacidad calorıfica molar o por unidad
de masa, cX = CX/m, llamandose entonces calor especıfico.
A partir de su definicion, es facil conocer el calor transferido en un proceso conocida
como dato la capacidad calorıfica,
QifX =
∫ f
i
CX(T ) dT
En principio, serıa necesario conocer la dependencia de CX con la temperatura, pero
normalmente no se comete demasiado error considerando que es aproximadamente

296 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
Sustancia c [kJ/(kg.K)] c [J/(mol.K)]
Lıquidos
Agua 4.18 75.2Alcohol etılico 2.4 111Mercurio 0.140 28.3
Solidos
Aluminio 0.900 24.3Cobre 0.386 24.5Hielo (−10o C) 2.05 36.9Oro 0.126 25.6Vidrio 0.840 25.6
constante. En ese caso el calor transferido en el proceso X entre el estado i y el f sera:
Qif = Cx(Tf − Ti) = ncX(Tf − Ti) = mcX(Tf − Ti)
En el caso de un sistema expansivo, si se trata de un proceso a volumen constante,
X = V , se tiene la capacidad calorıfica a volumen constante y si es a presion constante,
X = P , es la capacidad calorıfica a presion constante. Se puede demostrar que siempre
CP ≥ CV > 0 porque CP = CV + nR.
Las capacidades calorıficas molares de un gas ideal dependen del numero de grados
de libertad microscopicos que tenga:
Monoatomico −→ cV =3
2R cP =
5
2R
Diatomico −→ cV =5
2R cP =
7
2R
La tabla adjunta resume los calores especıficos de algunos lıquidos y solidos. Debido
a su pequena compresibilidad en ellos la capacidad calorıfica a presion y a volumen
constante son aproximadamente iguales. El calor especıfico del agua lıquida vale: cagua =
1 cal/(g.K)= 1 kcal/(kg.K)= 4,184 kJ/(kg.K).

10.3. PRIMER PRINCIPIO 297
10.3.4 Ejemplo
Para medir el calor especıfico del plomo, se calientan 600 g de perdigones de este metal
a 100oC y se colocan en un calorımetro de aluminio de 200 g de masa, que contiene 500
g de agua inicialmente a 17,3oC. Si la temperatura final del sistema es de 20oC, ¿cual
es el calor especıfico del plomo? (Dato: calor especıfico del aluminio, 0,900 kJ/(kg.K))
Qcedido = Qabsorbido −→ QPb = QH2O +QAl
QPb = mPbcPb|∆TPb|
QH2O = mH2OcH2O∆TH2O
QAl = mAlcAl∆TAl
mPbcPb|∆TPb| = mH2OcH2O∆TH2O +mAlcAl∆TAl
Y despejando cPb:
cPb = 0,13 kJ/(kg.K)
10.3.5 Ejemplo
Un sistema formado por 0,32 moles de un gas ideal monoatomico con cV = 32R, ocupa
un volumen de 2,2 l a una presion de 2,4 atm (punto A de la figura). El sistema describe
un ciclo formado por tres procesos:
1. El gas se calienta a presion constante hasta que su volumen en el punto B es de
4,4 l.
2. El gas se enfrıa a volumen constante hasta que la presion disminuye a 1,2 atm
(punto C).
3. El gas experimenta una compresion isoterma y vuelve al punto A.
a) ¿Cual es la temperatura en los puntos A, B y C? b) Determina W , Q y ∆U para
cada proceso y para el ciclo completo.

298 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
(1)
(3)
(2)
2.4
1.2
4.42.2
P
(atm)
V (l)
A B
C
a) A partir de la ecuacion de los gases ideales determinamos las temperaturas de
los puntos A, B y C:
TC = TA =PAVAnR
= 201 K
TB =PBVBnR
=2PAVAnR
= 2TA = 402 K
b) El proceso (1) es isobaro, luego:
W1 = −PA∆V = −PA(VB − VA) = −0,53 kJ
Q1 = CP∆T = (CV + nR)∆T =5
2nR∆T = 1,3 kJ
∆U1 = W1 +Q1 = 0,80 kJ
En el proceso (2):
W2 = 0
Q2 = CV ∆T =3
2nR∆T = −0,80 kJ
∆U2 = W2 +Q2 = −0,80 kJ
El proceso (3) es isotermo, luego ∆U3 = 04:
W3 = nRTA lnVAVC
= 0,37 kJ
4Es facil demostrar que para un gas ideal, la variacion de energıa interna en un proceso cualquierase puede expresar siempre como ∆U = CV ∆T . Luego en procesos isotermos (o en los que no hayavariacion de temperatura entre los estados inicial y final) es nula. Es importante resaltar entoncesque un gas ideal, ademas de verificar la ecuacion de estado PV = nRT , tiene capacidades calorıficasconstantes y las variaciones de energıa interna estan siempre asociadas a cambios de temperatura.
10.4. SEGUNDO PRINCIPIO DE LA TERMODINAMICA 299
∆U3 = W3 +Q3 −→ Q3 = −W3 = −0,37 kJ
Para el ciclo total:
Wt = W1 +W2 +W3 = −0,16 kJ
Qt = Q1 +Q2 +Q3 = 0,16 kJ
∆Ut = 0 por ser un proceso cıclico y U una funcion de estado.
10.4. Segundo Principio de la Termodinamica
10.4.1. Maquinas termodinamicas
Desde un punto de vista practico es muy interesante la existencia y diseno de
dispositivos capaces de convertir, al menos parcialmente, calor en trabajo o trabajo
en calor. Antes de definir desde un punto de vista termodinamico estos dispositivos es
necesario introducir dos conceptos nuevos:
Fuente de calor : es un sistema tal que solo puede interaccionar con otro comu-
nicandole o absorbiendo energıa en forma de calor, de manera que sus parametros
intensivos, y en particular, su temperatura permanecen constantes (por ejemplo,
la atmosfera, el mar, etc).
Fuente de trabajo: es un sistema tal que solo puede interaccionar con otro comu-
nicandole o absorbiendo energıa en forma de trabajo, de manera que sus parame-
tros intensivos, y en particular su presion, permanecen constantes.

300 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
Foco caliente
Foco frío
W
Motor térmico
QC
QF
TC
TF
Foco caliente
Foco frío
W
Frigorífico o bomba de calor
QC
QF
TC
TF
Se denomina maquina termica a un dispositivo de funcionamiento cıclico que trans-
fiere calor y trabajo con su entorno. Las mas simples intercambian calor con solo dos
fuentes de calor.
1. Motor termico: maquina termica que proporciona un trabajo, |W |, absorbiendo
un calor, |QC | (> |W |), de una fuente caliente a temperatura, TC , y cediendo un
calor, |QF |, a una fuente frıa a temperatura TF .
2. Bomba de calor : maquina termica que tiene por objeto proporcionar un calor,
|QC |, absorbiendo energıa en forma de trabajo, |W | (< |QC |), y absorbiendo un
calor, |QF |.
3. Refrigerador : maquina termica que tiene por objeto extraer energıa en forma de
calor, |QF |, de una fuente frıa, absorbiendo un trabajo, |W |, y cediendo un calor,
(< |QC |) a una fuente caliente.
De una forma general se define el rendimiento de una maquina termodinamica como
el cociente entre la energıa que se desea obtener y la que es necesario suministrar. Se

10.4. SEGUNDO PRINCIPIO DE LA TERMODINAMICA 301
tiene entonces que,
Motor termico −→ η =|W ||QC |
= 1− |QF ||QC |
(0 ≤ 1)
Bomba de calor −→ ν =|QC ||W |
=|QC |
|QC | − |QF |(≥ 1)
Refrigerador −→ ε =|QF ||W |
=|QF |
|QC | − |QF |(≥ 0)
10.4.1 Ejemplo
En cada ciclo un motor termico absorbe 200 J de calor de un foco caliente, realiza un
trabajo y cede 160 J a un foco frıo. ¿Cual es su rendimiento?
η =|W ||QC |
= 1− |QF ||QC |
= 1− 160
200= 0,20
Es decir, el rendimiento del motor es del 20 %.
10.4.2. Enunciados del Segundo Principio
El Segundo Principio de la Termodinamica se desarrollo en el s. XIX durante la
revolucion industrial, en pleno desarrollo de maquinas capaces de producir trabajo
mecanico. Basados en consideraciones experimentales, en 1850 y 1851, Clausius y Kel-
vin (y mas tarde Planck) formularon los siguientes enunciados:
Enunciado de Clausius: es imposible construir un dispositivo que funcionando
cıclicamente no produzca otro efecto mas que la transferencia de calor de una
fuente a otra de mayor temperatura.
Enunciado de Kelvin-Planck: es imposible construir un dispositivo que funcio-
nando cıclicamente no produzca otro efecto mas que extraer calor de una fuente
y convertirlo ıntegramente en trabajo.
Se puede demostrar que ambos enunciados son equivalentes. Es importante resaltar
que no es imposible convertir ıntegramente calor en trabajo, pero sı lo es si el proce-
so es cıclico, es decir, si el sistema vuelve a su estado inicial. Si el proceso es cıclico

302 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
necesariamente para producir un trabajo se ha de ceder una fraccion del calor a una
fuente frıa, el rendimiento del motor no puede ser la unidad (0 ≤ η < 1). Y en el caso
de un frigorıfico, si se pretende extraer un calor de una fuente frıa es imprescindible
realizar un trabajo, no puede ser el rendimiento infinito (0 ≤ ε < ∞). Es decir, el Se-
gundo Principio proporciona unas cotas superiores para el rendimiento de las maquinas
termicas.
10.4.3. Procesos reversibles e irreversibles
Formalmente se dice que un proceso termodinamico es reversible si se puede invertir
de modo que el proceso cıclico resultante, tanto para el sistema como para el entorno, no
viole el Segundo Principio. Proceso irreversible es aquel que no es reversible. Desde un
punto de vista mas practico, un proceso reversible debe reunir al menos las siguientes
condiciones:
1. No debe haber transformaciones de energıa mecanica en termica por medio de
fricciones, o de otro tipo de fuerzas disipativas.
2. Las transferencias de energıa como el calor solo pueden suceder cuando las dife-
rencias de temperatura entre los objetos son infinitesimalmente pequenas.
3. El proceso debe ser cuasiestatico, de modo que el sistema siempre se encuentre
en un estado de equilibrio termodinamico.
Cualquier proceso real en la naturaleza es irreversible, realmente los procesos re-
versibles son idealizaciones, que en la realidad se pueden conseguir aproximadamente,
pero nunca de forma completa.
10.4.4. Ciclo y teorema de Carnot
En 1824 el ingeniero frances Sadi Carnot publico un trabajo esencial sobre como
podrıa obtenerse trabajo a partir del calor absorbido de un foco termico. Diseno un
proceso reversible ideal, denominado hoy ciclo de Carnot realizado por un sistema
hidrostatico en contacto con dos fuentes de calor, con las siguientes etapas (vease la
figura adjunta):
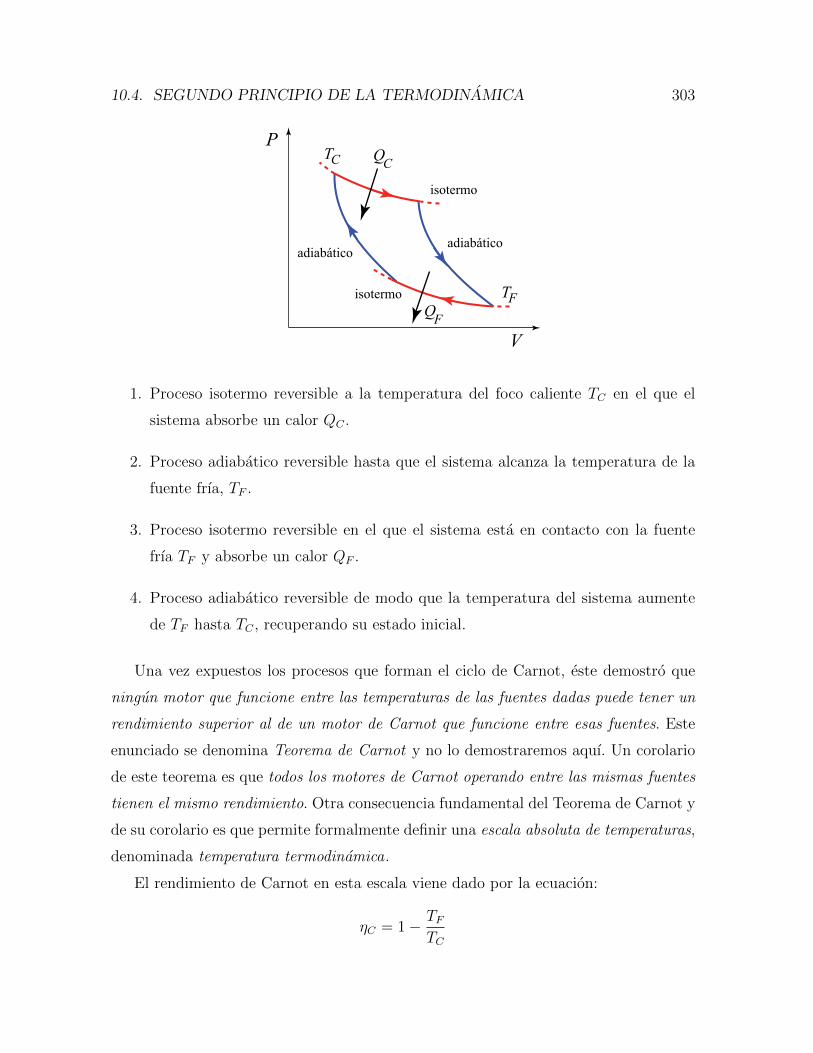
10.4. SEGUNDO PRINCIPIO DE LA TERMODINAMICA 303
P
V
isotermo
isotermo
adiabáticoadiabático
TC
TF
QC
QF
1. Proceso isotermo reversible a la temperatura del foco caliente TC en el que el
sistema absorbe un calor QC .
2. Proceso adiabatico reversible hasta que el sistema alcanza la temperatura de la
fuente frıa, TF .
3. Proceso isotermo reversible en el que el sistema esta en contacto con la fuente
frıa TF y absorbe un calor QF .
4. Proceso adiabatico reversible de modo que la temperatura del sistema aumente
de TF hasta TC , recuperando su estado inicial.
Una vez expuestos los procesos que forman el ciclo de Carnot, este demostro que
ningun motor que funcione entre las temperaturas de las fuentes dadas puede tener un
rendimiento superior al de un motor de Carnot que funcione entre esas fuentes. Este
enunciado se denomina Teorema de Carnot y no lo demostraremos aquı. Un corolario
de este teorema es que todos los motores de Carnot operando entre las mismas fuentes
tienen el mismo rendimiento. Otra consecuencia fundamental del Teorema de Carnot y
de su corolario es que permite formalmente definir una escala absoluta de temperaturas,
denominada temperatura termodinamica.
El rendimiento de Carnot en esta escala viene dado por la ecuacion:
ηC = 1− TFTC

304 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
Entonces, cualquier motor termodinamico que opere entre dos fuentes de calor tiene
un rendimiento, η que verifica:
η ≤ ηC
El teorema de Carnot tambien es valido para frigorıficos y bombas de calor, es decir,
que se debe verificar:
ν ≤ νC =TC
TC − TFpara bombas de calor
ε ≤ εC =TF
TC − TFpara frigorıficos
10.4.2 Ejemplo
Una maquina termica extrae 200 J de un foco caliente a una temperatura de 373 K,
realiza 48 J de trabajo y cede 152 J al entorno, que se encuentra a 273 K. ¿Cuanto
trabajo se pierde debido a las irreversibilidades del proceso?
El trabajo perdido se calcula comparando con una maquina reversible de Carnot que
opere entre las mismas fuentes:
Wperdido = Wmax −W
El trabajo maximo es el que realizarıa el motor de Carnot:
Wmax = ηCQC −→ Wperdido = ηCQC −W
Y como:
ηC = 1− TFTC
Wperdido =
(1− TF
TC
)QC −W = 5,6 J

10.5. PROBLEMAS 305
10.5. Problemas
1. Un gas ideal ocupa un volumen de 100 cm3 a 20oC y a una presion de 100 Pa.
Determınense el numero de moles y de moleculas de gas en el recipiente.
(Respuestas : n = 4,11× 10−6 moles; N = 2,47× 1018 moleculas)
2. Un recipiente con un embolo movil contiene una cierta cantidad de helio. Inicial-
mente, las condiciones del gas son las siguientes: Ti = 300 K, Pi = 200 kPa y
Vi = 15× 10−3 m3. Si el embolo comprime el gas hasta un estado final: Pf = 350
kPa y Vi = 1,2× 10−3 m3, calculese su temperatura final (supongase que el helio
se comporta como un gas ideal).
(Respuestas : Tf = 420 K)
3. El hilo de un pendulo simple es de acero (αl = 1,2 × 10−5 K−1). Cuando la
temperatura es 0oC, el periodo de sus oscilaciones es de 2,000 s. Determınese el
periodo del pendulo cuando la temperatura es de 125oC.
(Respuestas : T1 = 2,0015 s)
4. Calcular el trabajo realizado sobre un gas ideal que efectua una expansion adiabati-
ca cuasiestatica desde un estado (P0, V0) a otro estado (P1, V1), sabiendo que en
un proceso de ese tipo se verifica la relacion:
PV γ = cte.
donde γ es una constante5.
(Respuestas : W =P1V1 − P0V0
γ − 1)
5. Una cantidad dada de N2, suponiendo que se comporta como un gas ideal, se
encuentra inicialmente en un estado i, en el que ocupa un volumen de 0,5 l a
2 atm de presion. Pasa a un estado final f en el que ocupa un volumen de 2 l,
siguiendo tres caminos diferentes:
5Se define el coeficiente adiabatico, γ, como CP /CV . Para un gas ideal monoatomico su valoraproximado es 5/3 ≈ 1,67 y para uno diatomico 7/5 = 1,4.

306 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
a) Expansion adiabatica desde el estado i al f .
b) Expansion isoterma hasta el volumen de 2 l, seguida de una variacion de
presion a volumen constante hasta alcanzar el estado final f .
c) Una reduccion de presion a volumen constante hasta que la presion sea la
misma que la que corresponde al estado f , seguida de una expansion a presion
constante hasta el estado final f .
Dibujar en un diagrama P − V los tres procesos anteriores y calcular el trabajo
realizado por el N2 en cada uno de ellos (γ = 1,4).
(Respuestas : a) Wa = −107,5 J; b) Wb = −140,0 J; c) Wc = −43,6 J)
6. Calcula el trabajo realizado por n moles de gas durante una expansion isoterma
cuasiestatica, desde un volumen inicial V0 a un volumen final 2V0, si la ecuacion
termica de estado es:
a)
P (V − b) = nRT (R, b ctes.)
b)
PV = nRT (1− B
V) (R = cte., B = f(T ))
c)
(P +a
V 2)(V − b) = nRT (R, a y b ctes.)
(Respuestas : a) Wa = −nRT ln
(2V0 − bV0 − b
); b) Wb = nRT ln
(B
2V0
)− ln 2; c)
Wc = −nRT ln
(2V0 − bV0 − b
)+
a
2V0
)
7. Un tubo cilındrico de paredes rıgidas y adiabaticas esta dividido en dos partes
por una pared rıgida aislante en la que existe un pequeno orificio. Contra esta
pared se mantiene un piston adiabatico y sin rozamiento, evitando de este modo
que el gas que se encuentra al otro lado pase a traves del orificio. El gas se man-
tiene a la presion P1 mediante otro piston adiabatico desprovisto de rozamiento.
Imaginemos que ambos pistones se desplazan simultaneamente, de tal modo que

10.5. PROBLEMAS 307
cuando el gas pase a traves del orificio, la presion conserve su valor constante P1
a un lado del tabique separador y un valor inferior P2 en el otro lado, hasta que
todo el gas sea obligado a pasar a traves del orificio. Demuestrese que:
U1 + P1V1 = U2 + P2V2 .
8. Se consideran dos moles de O2, considerado como gas ideal, los cuales pueden
pasar cuasiestaticamente del estado inicial A : (PA, VA, TA) al estado final B :
(PB = 3PA, VB, TA) por tres caminos distintos: A1B: transformacion isoterma,
A2B: recta en el diagrama P −V , A3B: compresion isocora hasta 3PA seguida de
una disminucion de volumen a P constante hasta VB. Calcula los trabajos y las
cantidades de calor puestas en juego durante las transformaciones, en funcion de
R y TA.
(Respuestas : a) W1 = 2RT ln
(VAVB
); b) W2 =
8
3RTA; c) W3 = 4RTA)
9. En un recipiente de paredes adiabaticas se colocan en contacto termico tres cuer-
pos de masas, m1,m2,m3, calores especıficos a presion constante c1, c2 y c3, y
temperaturas t1 = 10oC, t2 = 50oC, t3 = 100oC, respectivamente, verificandose
la relacion:
m1 =m2
2=m3
3y
c1
5=c2
4=c3
6
Calcula la temperatura final de equilibrio.
(Respuestas : tf = 72,6oC)
10. La capacidad calorıfica molar a presion constante de un determinado gas varıa
con la temperatura segun la ecuacion: CP = a+ bT − c/T 2; en la que a, b y c son
constantes. ¿Que cantidad de calor es transferido al sistema durante un proceso
isobarico cuasiestatico en el cual n moles de gas experimentan una elevacion de
temperatura de T1 a 2T1?
(Respuestas : Q = n
(aTi +
3
2bT 2
i −C
2Ti
))
11. Un gas que cumple la ecuacion P (V − 1) = 0,3T describe un ciclo formado por
dos isotermas y dos isocoras. La relacion entre los volumenes extremos V1 y V2
308 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
es tal que:(V2 − 1)
(V1 − 1)=√e
y la relacion entre las temperaturas T1 y T2 de las isotermas es
T1
T2
= 2
El trabajo realizado en este ciclo es de 65 J. Calculense las temperaturas T1 y T2.
(Respuestas : T1 = 867,0 K; T2 = 433,5 K)
12. ¿Cual es el medio mas eficaz de aumentar el rendimiento de una maquina de Car-
not: aumentar TC (temperatura de la fuente caliente), mantener TF (temperatura
de la fuente frıa) constante o disminuir TF manteniendo TC constante?
(Respuestas : Es mas eficaz disminuir la temperatura de la fuente frıa)
13. Demuestra la imposibilidad de que dos procesos adiabaticos cuasiestaticos se cor-
ten. (Indicacion: Supongase que se cortan y completese el ciclo con una isoterma.
Demuestrese que la realizacion de este ciclo contradice el Segundo Principio.)
14. Un recipiente contiene 600 cm3 de helio gaseoso a 2 K y 1/36 atm. Tomese el
cero de energıa interna para el helio en este punto.
a) Se eleva la temperatura a volumen constante hasta 288 K. Suponiendo que
el helio se comporta como gas monoatomico perfecto, ¿que cantidad de calor ha
absorbido y cual es la energıa interna del helio? ¿Puede considerarse esta energıa
como calor o trabajo almacenados?
b) Se expande ahora el helio adiabaticamente hasta 2 K. ¿Que trabajo se ha
realizado y cual es la nueva energıa interna? ¿Se ha convertido calor en trabajo
sin compensacion, contradiciendo ası el Segundo Principio?
c) Se comprime ahora el helio isotermicamente hasta su volumen inicial. ¿Cuales
son las cantidades de calor y trabajo que intervienen en este proceso? ¿Cual es
el rendimiento del ciclo? Tracese un diagrama P − V .
(Respuestas : a) ∆U = Q12 = 362 J; b) W23 = −362 J; c) W31 = 12,36 J;
Q31 = −12,36 J; η = 97 %)

10.5. PROBLEMAS 309
15. Un motor de gas ideal trabaja segun un ciclo que, representado en un diagrama
P − V , es un rectangulo. Sean P1 y P2, respectivamente, las presiones inferior y
superior, y llamemos V1 y V2 a los volumenes inferior y superior.
a) Calcular el trabajo realizado en un ciclo.
b) Indica que partes del ciclo implican un paso de calor al gas y calcular la
cantidad de calor absorbida por el gas en un ciclo. (Suponganse capacidades
calorıficas constantes.)
c) Demostrar que el rendimiento de este motor es:
η =γ − 1
γP2
P2 − P1
+V1
V2 − V1
(Respuestas : a) W = (P1−P2)(V2−V1); b) Q =1
γ − 1V1(P1−P2)+
γ
γ − 1P2(V1−
V2) )
16. Un congelador se debe mantener a una temperatura de −40oC en un dıa de
verano cuando la temperatura ambiente es de 27oC. Para mantener el congelador
a esa temperatura se necesita extraer de el un calor de 17,650 cal/min. ¿Cual es
la maxima eficiencia posible del congelador y cual es la mınima energıa que debe
suministrarse al congelador?
(Respuestas : ε = 3,48; Wmin = 5072 cal/min)
17. Un gas ideal (cP = 7/2R) describe el ciclo de la figura. Conocidos los siguientes
datos: P1 = 1 atm, T1 = 80oC, P2 = 25 atm y T3 = 3000oC, calculense los
calores y trabajos puestos en juego durante el ciclo (discutase si son absorbidos
o cedidos). Obtengase asimismo su rendimiento.
(Respuestas : W12 = 11060 J/mol; Q23 = 49588 J/mol; W34 = −40881 J/mol;
Q41 = −19766 J/mol; η = 0,60)

310 CAPITULO 10. INTRODUCCION A LA TERMODINAMICA
1
2
3
4
adiabática
adiabática
P
V
18. Una barra de metal de 30 cm de longitud se dilata 0, 075 cm cuando su tem-
peratura se aumenta de 0◦C a 100◦C. Una barra de material diferente y de la
misma longitud se dilata 0, 045 cm para el mismo incremento de temperatura.
Una tercera barra de 30 cm construida con dos trozos de los metales anteriores
unidos por sus extremos, se dilata 0,065 cm entre 0◦C y 100◦C. Hallar la longitud
de cada una de las porciones de la barra compuesta.
(Respuestas : l1 = 20 cm ; l2 = 10 cm)
19. Un bloque de hielo que pesa 10 kg se encuentra a−8◦C. Determinar la cantidad de
agua que hay que anadir suponiendo que esta se encuentra a 50◦C, para obtener
al establecerse el equilibrio una mezcla de hielo y agua por partes iguales. Calor
especıfico del hielo: 0,5 cal/g◦C; calor especifico del agua : 1 cal/g ◦C ; calor
latente de fusion : 80 cal/g.
(Respuestas : m = 4888, 89 g)
20. Calcular la variacion de energıa interna correspondiente a la transformacion de 1
kg de hielo a 0◦C y 3 atm en agua lıquida a 4◦C y a la misma presion. Densidad
del hielo a 0◦C : 0, 917 g/cm3. Calor latente de fusion del hielo: 80 cal/g.
(Respuestas : ∆U = 351, 7 kJ)
21. Una maquina de Carnot absorbe calor de una fuente a temperatura de 120◦C y
entrega calor a otra fuente a temperatura de 10◦C. Si la maquina absorbe 150J de

10.5. PROBLEMAS 311
la fuente caliente, hallese el trabajo que realiza, el calor que cede y su rendimiento.
(Respuestas : W = 41, 97 J ; Q = 108 J; η = 27, 98 %)


Parte IV
Practicas de laboratorio


Caıda libre
Objetivos
Comprobar las relaciones posicion-tiempo [y = y(t)] y velocidad-posicion [v =
v(y)] en un caso particular sencillo de movimiento uniformemente acelerado en
una dimension.
Determinar experimentalmente la aceleracion de la gravedad, g.
Material
Aparato de caıda libre.
Bola de acero (d = 1,9 cm) y bola de goma (d = 3,1 cm).
Regla graduada.
Contador digital.
Barrera fotoelectrica.
Fundamento teorico
Una de las fuerzas habituales en nuestra experiencia diaria es la que ejerce la Tierra
sobre un objeto cualquiera. Esta fuerza se denomina gravitatoria, ~fg, o, desde el punto
de vista del objeto que la experimenta peso, ~P . Si se deja en libertad un objeto cerca
de la superficie terrestre comienza a caer hacia ella. Despreciando la resistencia que
ejerce el aire de la atmosfera, experimentalmente se comprueba que la aceleracion con

316 CAPITULO 11. CAIDA LIBRE
que cae esta dirigida hacia el centro de la Tierra, es independiente del objeto y ademas
es constante. Esta aceleracion se denomina aceleracion de la gravedad y en el S.I. vale
aproximadamente 9,81 m/s2. Se denomina movimiento de caıda libre al movimiento de
caıda de un cuerpo hacia la superficie terrestre con una aceleracion g si su velocidad
inicial es nula y se desprecia la resistencia del aire.
En realidad, medidas precisas de la aceleracion de la gravedad, indican que:
a) La fuerza de atraccion de la Tierra sobre un objeto depende de la distancia del
objeto al centro de la Tierra, r, del siguiente modo: fg ∼ 1/r2. Ası, un cuerpo
pesa ligeramente menos cuando se encuentra en lugares elevados, que respecto al
nivel del mar. fg tambien depende de la latitud a la que se encuentra el objeto,
puesto que la Tierra no es completamente esferica, sino que esta achatada por
los polos.
b) La aceleracion de un cuerpo en caıda hacia la superficie terrestre depende de la
resistencia que oponga el aire a su caıda. Si dejamos caer simultaneamente una
pequena piedra y una hoja de papel con la misma masa, siempre llega antes la
piedra. Esto se debe a que la resistencia que ofrece el aire a la hoja de papel es
mayor, aunque la aceleracion gravitatoria es identica para los dos objetos.
En cualquier caso, a efectos practicos, podemos despreciar tanto la variacion de g
con la altitud y la latitud como la resistencia que opone el aire en la caıda y expresar:
~fg = m~a o de otro modo: ~P = −mg~jdonde g =| ~g |= 9,81 m/s2 y es aproximadamente constante. Por lo tanto, el movimiento
de caıda libre es uniformemente acelerado.
Condiciones iniciales: t = 0→ y0 = 0, v0 = 0.
Operando en terminos de modulos:
g =dv
dt→ dv = g dt→
∫ v
0
dv =
∫ t
0
g dt =⇒ v = g t
v =dy
dt→ dy = v dt→
∫ y
0
dy =
∫ t
0
g t dt =⇒ y =1
2g t2

317
Realizacion practica
Medida de la relacion posicion-tiempo, y = y(t)
Se lleva a cabo el montaje experimental con el contador digital no conectado a la
red y utilizaremos la bola de acero. Comprueba que la bola y la cazoleta estan alineadas
de modo que la bola caiga dentro de la cazoleta.
Conexiones electricas:
salidas del START ⇐⇒ disparador (d)
salidas del STOP ⇐⇒ cazoleta
boton INVERT del START presionado
Una vez finalizado el montaje se conecta el contador a la red y se realizan las medidas
de los pares (t, y) variando la posicion de la cazoleta. (Antes de realizar cualquier
medida pulsa STOP y luego NULL para poner a cero el contador).
Medida de la relacion velocidad-posicion, v = v(y)
Estas medidas se realizan con la ayuda de una barrera fotoelectrica y la bola de
goma. Sabiendo el diametro de la bola, ∆s, (para la bola de acero, ∆s = 1,7 cm) y el
tiempo que tarda en pasar por la barrera, ∆t, tenemos: v = ∆s/∆t para una altura
dada.
Coloca la cazoleta por debajo de la barrera de modo que cazoleta, barrera y dispa-
rador esten alineados.
Conexiones electricas (hacerlas con el contador apagado):
borne rojo del contador ⇐⇒ borne rojo de la barrera (+5)
azul del contador ⇐⇒ azul de la barrera
amarillos del contador (en cortocircuito) ⇐⇒ rojo del enchufe bipolar de la barrera
blancos del contador (en cortocircuito) ⇐⇒ negro del enchufe bipolar de la barrera
boton INVERT del STOP presionado

318 CAPITULO 11. CAIDA LIBRE
Resultados a obtener
1.1.- Mide 8 pares de valores (t, y).
1.2.- Representa graficamente las funciones: y = y(t), y = y(t2), y = y(Ln(t)).
1.3.- Ajusta por el metodo de los mınimos cuadrados las que mas se asemejan a una
lınea recta.
1.4.- Calcula g a partir de los ajustes anteriores.
2.1.- Mide 8 pares de valores (y, v).
2.2.- Representa graficamente las funciones: v = v(y), v2 = v2(y), v = v(Ln(y)).
2.3.- Ajusta por el metodo de los mınimos cuadrados las mas parecidas a una recta.
2.4.- Calcula g a partir de los ajustes anteriores, utilizando la relacion teorica que
liga v e y.
Cuestiones
1. ¿Bajo que hipotesis puede considerarse la aceleracion de la gravedad constante?
2. Demuestra la relacion teorica que liga la velocidad de caıda con la altura: v =
v(y).
3. ¿Que diferencia hay entre los conceptos de peso y masa de un objeto?
4. Imagina dos objetos de igual masa, pero uno de ellos con una superficie mucho
mayor que la del otro. Si ambos caen libremente dentro de un recipiente en el que
previamente se ha hecho el vacıo, ¿cual de los dos llega antes al suelo? Razona la
respuesta.
5. ¿Donde pesa mas un objeto, en Venezuela o en Groenlandia?
Estatica y dinamica de un muellevertical
Objetivos
Determinacion de la constante del muelle.
Estudio de un muelle oscilante como ejemplo de movimiento armonico simple.
Material
Trıpode con barra soporte.
Juego de muelles.
Bolas de diferentes materiales.
Juego de pesas y soporte.
Sensor de movimiento y ordenador.
Fundamento teorico y realizacion practica
El movimiento armonico simple es consecuencia de una fuerza recuperadora lineal.
Esto es, una fuerza directamente proporcional (lineal) al desplazamiento con respecto
a una posicion de equilibrio. Se dice que la fuerza es recuperadora en el sentido de
que siempre tiende a que el cuerpo recupere la posicion de equilibrio. En esta practica
estudiaremos la fuerza recuperadora lineal experimentada por una masa colgada de un
muelle espiral con la ayuda de un sensor de movimiento.

320 CAPITULO 11. MUELLE VERTICAL
Si la masa se aleja de la posicion de equilibrio inicia un movimiento oscilatorio de
tipo armonico simple. El desplazamiento o elongacion, z(t), del movimiento viene dado
por la distancia desde la posicion de equilibrio a la posicion que ocupa la masa en un
instante determinado. La amplitud, A, es la distancia entre las maximas elongaciones
en un sentido y otro del movimiento. El periodo, T , del movimiento armonico simple
viene dado por el tiempo que tarda la masa en realizar una oscilacion completa, por
ejemplo, el tiempo que tarda en pasar desde una posicion de maxima elongacion hasta
la siguiente. La frecuencia, f , es el inverso del periodo y la frecuencia angular, ω = 2πf .
La ley de Hooke. Calculo de la constante del muelle
Si se desplaza del equilibrio un objeto conectado a un muelle, este ejerce una fuerza
sobre el objeto opuesta al desplazamiento y viene dada por la ley de Hooke:
F = −kz (11.1)
Es decir, se trata de una fuerza proporcional y opuesta al desplazamiento con una
constante de proporcionalidad, k, que se denomina constante del muelle. Como esta
constante es una fuerza dividida por un desplazamiento, sus unidades en el S.I. son
N/m. Esta constante es una medida de la rigidez del muelle. Nos ocuparemos en par-
ticular de una masa colgada de un muelle vertical.
Si una masa m se cuelga de un muelle vertical, sobre ella actuan dos fuerzas, la
recuperadora del muelle y el peso, F = −mg. Cuando la masa esta en equilibrio, ambas
son iguales y, por lo tanto,
m =k
gz (11.2)
Esta ecuacion es poco util porque no es sencillo determinar cual es el punto inicial de
masa m = 0 porque el muelle tambien tiene masa. Como es una ecuacion lineal, es
mas practico considerar incrementos de posicion y de masa con respecto a unos valores
iniciales z0 y m0, que tambien verifican
m0 =k
gz0. (11.3)
Si de la ecuacion (3) restamos la (4) se obtiene:
∆m =k
g∆z (11.4)

321
con ∆m = m−m0 y ∆z = z − z0.
Por tanto, vamos a medir la posicion inicial, z0, para el caso en el que solo esta el
soporte y a partir de ahı consideraremos los desplazamientos, z, para los casos en que
se van anadiendo las pesas disponibles. Para medir las posiciones se coloca el sensor de
movimiento debajo del muelle y en su vertical. Utilizando el programa de ordenador
para medir distancias se obtiene directamente el valor de la posicion en metros. A partir
de aquı se representa graficamente ∆m frente a ∆z y se realiza un ajuste lineal. La
pendiente del ajuste se corresponde con k/g y tomando como dato conocido g = 9,8
m/s2 se despeja k (¡cuidado con las unidades!).
El periodo de un muelle oscilante.
Si suponemos que la masa del muelle es despreciable, cuando colgamos de el una
masa m, y hacemos que esta oscile, se puede demostrar que el periodo de la oscilacion
T viene dado por
T = 2π
√m
k. (11.5)
T tiene unidades de segundos, la constante del muelle k viene dada en N/m y la masa
m en kilos. Si elevamos esta ecuacion al cuadrado,
T 2 =4π2
km, (11.6)
la masa aparece proporcional al cuadrado del periodo y por consiguiente podemos re-
escribir esta ecuacion en terminos de incrementos de masa. En efecto, como ∆m =
m−m0, se tiene que m = ∆m+m0 y sustituyendo en la ecuacion anterior obtenemos:
T 2 =4π2
k(∆m+m0) =
4π2
k∆m+
4π2m0
k(11.7)
El procedimiento experimental consiste en medir el periodo de oscilacion para varias
masas. Para calcular el periodo simplemente mediremos el tiempo total, t, empleado
para realizar 50 oscilaciones completas, dividiendo t por 50 obtendremos una buena
estimacion del periodo. El tiempo se medira con el cronometro del ordenador.
De la representacion de los periodos al cuadrado, T 2, frente a los incrementos de
masa, ∆m, en kg se obtiene una recta y = ax + b cuya pendiente, a, nos permite
calcular la constante del muelle.
322 CAPITULO 11. MUELLE VERTICAL
Dinamica del muelle
Despreciando el rozamiento con el aire, el movimiento oscilatorio del muelle cuando
se le somete a una pequena perturbacion es de tipo armonico simple. Matematicamente,
la elongacion del muelle en funcion del tiempo viene dada por una funcion senoidal:
z(t) = A cos(ωt+ δ) (11.8)
donde δ es el desfase inicial, dependiente de la posicion y velocidad de la masa conectada
al muelle en el instante inicial. Derivando esta ecuacion se pueden obtener la velocidad
y la aceleracion como funciones del tiempo.
En la practica construiremos las ecuaciones del movimiento de dos muelles conecta-
dos a la misma masa (esfera de madera). Para ello utilizaremos el sensor de movimiento
y el programa de ordenador que permite obtener las graficas de z(t), v(t) y a(t). Ha-
ciendo un ajuste senoidal a las tres obtendremos los parametros que aparecen en las
ecuaciones de movimiento.
Resultados a obtener
a) Representese graficamente ∆m frente a ∆z. Ajustense los datos a una recta. Calcule-
se k/g a partir de la pendiente de la recta (ecuacion (11.4)).
b) Estımese el valor de la constante del muelle multiplicando por el valor conocido de
g = 9,8 m/s2.
c) Representese graficamente T 2 frente a ∆m y ajustense los datos a una recta. Calcule-
se la constante del muelle a partir de la pendiente de la recta.
d) Calculense la frecuencia, frecuencia angular y periodo de los dos muelles disponibles
conectados a la masa de madera.
e) Calcula la amplitud de las tres funciones: z(t), v(t) y a(t) y comprueba que las
relaciones entre ellas son las que indican los calculos teoricos.
f) Finalmente, escribe las ecuaciones de movimiento z(t), v(t) y a(t) para los dos
muelles.
323
Cuestiones
1. ¿En que unidades se miden en el S.I. las siguientes magnitudes: elongacion, am-
plitud, periodo y frecuencia? ¿Cuales son sus dimensiones?
2. Demuestra la ecuacion (11.5).
3. Comprueba que la ecuacion (11.7) es dimensionalmente correcta.
4. Contesta razonadamente a los siguientes enunciados:
a) El periodo de un objeto que oscila sobre un determinado muelle es indepen-
diente de que el muelle este situado vertical u horizontalmente.
b) La velocidad maxima de un objeto que oscila con amplitud A es indepen-
diente de que el muelle que lo sujeta este situado horizontal o verticalmente.
c) ¿Es realmente el movimiento del muelle del laboratorio armonico simple?
¿Por que? ¿Que hipotesis simplificadoras estamos asumiendo?


Pendulo simple
Objetivos
Comprobar los factores que determinan el periodo de un pendulo simple.
Determinar la aceleracion de la gravedad a traves del periodo de un pendulo.
Material
Trıpode con barra soporte.
Hilo de nylon.
Bolas de diferentes materiales.
Regla graduada.
Cronometro.
Celula fotoelectrica y ordenador portatil
Fundamento teorico
Un pendulo simple esta formado por una pequena masa, m, colgada del extremo de
un hilo, que se supone de masa despreciable e inextensible, unido por el otro extremo
a un soporte fijo. De este modo, cuando se da un pequeno impulso a la masa, oscila
alrededor de la posicion vertical de equilibrio. Las fuerzas que actuan sobre la masa,
cuando esta separada un angulo θ de la posicion de equilibrio, son las que se muestran
en el esquema.

326 CAPITULO 11. PENDULO SIMPLE
P
T
θ
θs
l
m
Si denominamos s al desplazamiento sobre el arco de circunferencia y aplicamos la
segunda ley de Newton en la direccion del movimiento:
ft = −mg sen θ = md2s
dt2
donde ft son las fuerzas tangenciales (en la direccion del movimiento) y el signo negativo
se debe al sentido elegido para el movimiento (hacia la izquierda). En terminos de
angulos (s = lθ):
−g sen θ = ld2θ
dt2−→ d2θ
dt2= −g
lsen θ
Si consideramos que el angulo θ es suficientemente pequeno se puede hacer la apro-
ximacion sen θ ' θ y se obtiene:d2θ
dt2= −g
lθ
Con esta hipotesis resulta que la aceleracion angular es proporcional al angulo, lo
que da lugar a un movimiento oscilatorio de tipo armonico simple. La solucion de la
ecuacion diferencial anterior se puede expresar como:
θ = θ0 cos(ωt+ δ)
donde θ0 y δ son el desplazamiento angular y el desfase iniciales, respectivamente y ω
es la frecuencia angular de la oscilacion: ω2 = g/l. Por lo tanto, el periodo de oscilacion

327
(tiempo que tarda la masa en realizar una oscilacion completa, hasta regresar al punto
de partida) resulta ser:
T =2π
ω= 2π
√l
g
En consecuencia, dentro de las hipotesis que consideramos se puede afirmar que el
periodo de oscilacion de un pendulo simple no depende de su masa sino unicamente
de la longitud del hilo y del valor particular de g en el lugar donde se encuentra el
pendulo.
Realizacion practica
Influencia de la masa
Se coloca una de las masas que se suministran colgada del hilo con una longitud
aproximada de 1 m. Se separa un angulo pequeno (∼ 10◦) de la posicion vertical de
equilibrio y se deja oscilar. Con el cronometro se mide el tiempo que tarda el pendulo en
completar 25 oscilaciones y se determina el periodo de la oscilacion. Repite la medida
3 veces y toma para T el valor medio. Vuelve a realizar el procedimiento con las otras
masas disponibles. Representa en una tabla las medidas obtenidas.
Calcula el periodo tambien con la celula fotoelectrica y el programa DataStudio.
Para ello, mide directamente el periodo con la celula 3 veces para cada masa y toma
el valor medio.
Influencia de la longitud del hilo
Con objeto de estudiar la dependencia del periodo con la longitud del hilo, utiliza
la masa esferica y disminuye la longitud del hilo 10 cm. Mide el periodo realizando 3
observaciones de 25 oscilaciones cada una. Repite el proceso disminuyendo de 10 en 10
centımetros la longitud del hilo hasta completar un total de 6 longitudes distintas.
Para cada longitud calcula tambien el periodo con la celula fotoelectrica, repitiendo
la medida 3 veces.

328 CAPITULO 11. PENDULO SIMPLE
Influencia de la amplitud inicial
Con la masa esferica y fijada la longitud del hilo aproximadamente a 90, 80, y 70
cm determina el periodo si la amplitud inicial es mucho mayor que 10◦
(por ejemplo,
deja oscilar el pendulo desde un angulo inicial de 45◦
aproximadamente). Representa
en una tabla las medidas obtenidas.
Para cada amplitud calcula tambien el periodo con la celula fotoelectrica, repitiendo
la medida 3 veces.
Resultados a obtener
1. Comparando las medidas realizadas con la longitud fija (1m) y distintas masas,
discute cual es la influencia de la masa en el periodo del pendulo, tanto en las
medidas realizadas con cronometro como con la celula fotoelectrica. ¿Esta esto
de acuerdo con la teorıa?
2. Representa graficamente T 2 = T 2(l) y ajusta por mınimos cuadrados tomando
los valores de T y l obtenidos en los apartados 4.1 y 4.2 para la bola esferica de
acero. A partir del ajuste, calcula el valor de la aceleracion de la gravedad, g.
Repite estos calculos y la figura con las medidas tomadas con el ordenador.
3. Calcula g a partir de los resultados del apartado 4.3 para amplitudes iniciales
grandes. ¿El valor que obtienes es mas proximo al valor teorico para g que el
resultado obtenido en el apartado anterior? Segun la teorıa, ¿deberıa ser mas
proximo o mas lejano?
Cuestiones
1. ¿Bajo que hipotesis basicas el periodo de un pendulo solo depende de la longitud
del hilo y de g?
2. Imagina dos pendulos identicos, uno situado a nivel del mar y el otro a 6000 m
de altitud, ¿sus periodos seran identicos?

329
3. Si un pendulo de 1 m de longitud se quiere utilizar como reloj, ¿cuantas oscila-
ciones representan 1 hora?
4. Un pendulo ha sido disenado para funcionar como reloj cuando la temperatura
ambiente es de 20◦
C. ¿Que sucedera en un dıa de verano si la temperatura se
aproxima a los 40◦
C, el reloj se adelantara o se atrasara?


Pendulo fısico
Objetivos
Comprobar los factores que determinan el periodo de oscilacion de un pendulo
fısico.
Determinar el momento de inercia de una barra.
Determinar experimentalmente la aceleracion de la gravedad.
Material
Barra metalica con orificios.
Trıpode.
Barrera fotoelectrica.
Regla graduada.
Fundamento teorico
Cualquier cuerpo rıgido colgado de algun punto que no sea su centro de masas
oscila cuando se desplaza de su posicion de equilibrio. Este sistema recibe el nombre de
pendulo fısico. Consideremos una figura plana suspendida de un punto (como muestra
el esquema, el eje de giro sera perpendicular al papel) a una distancia h del centro
de masas y desplazada un angulo φ de su posicion de equilibrio, tal y como indica la
figura.

332 CAPITULO 11. PENDULO FISICO
φ
h sen φ c.m.
P
eje de giro
m, I
z
h
El modulo del momento de la fuerza gravitatoria respecto al punto de suspension
es τ = −mghsenφ (el signo negativo se debe a que tiende a disminuir φ) y segun la
segunda ley de Newton para la rotacion:
τ = I α = Id2φ
dt2=⇒ −mgh senφ = I
d2φ
dt2
donde I es el momento de inercia del cuerpo respecto al eje de giro. Por lo tanto,
d2φ
dt2= −mgh
Isen φ
y si se considera que los desplazamientos angulares son suficientemente pequenos se
puede aproximar:
sen φ ' φ =⇒ d2φ
dt2= −ω2φ con ω2 =
mgh
I
En consecuencia, el pendulo realiza un movimiento armonico simple de periodo:
T = 2π
(I
mgh
)1/2
Tambien se puede expresar el periodo en terminos del momento de inercia del cuerpo
respecto a su centro de masas, Icm, sin mas que aplicar el teorema de Steiner: I =
Icm +mh2.

333
T = 2π
(Icm +mh2
mgh
)1/2
(11.9)
Realizacion practica
Se cuelga la barra por uno de sus orificios y se desplaza ligeramente de su posicion
de equilibrio. Se calcula el periodo utilizando la barrera fotoelectrica y el programa
DataStudio.
A continuacion se cambia el eje de giro de la barra eligiendo otro valor de h (distancia
eje-centro de masas) y se vuelve a calcular el periodo. De este modo construye una tabla
con 8 valores de periodos frente a distancias. Resume en una tabla todas las medidas
realizadas.
Resultados a obtener
1. A partir de la ecuacion (1) se puede determinar el momento de inercia de la barra
respecto a su centro de masas del siguiente modo:
T 2 = 4π2 Icm +mh2
mgh−→ hT 2 =
4π2
mg(Icm +mh2)
Una vez obtenida esta ecuacion basta representar graficamente la variable y defi-
nida como y = hT 2 frente a h2 y realizar un ajuste por mınimos cuadrados para
determinar tanto Icm como g (tomando como dato conocido la masa de la barra,
m = 87,3 g).
2. El valor teorico del momento de inercia de una barra delgada respecto a un eje
perpendicular que pasa por su centro de masas es Icm = 112ml2, donde l es su
longitud. Compara el valor experimental obtenido con el teorico. ¿Cual es el error
de la medida?
Cuestiones
1. Con el procedimiento experimental que se ha descrito y a partir de la ecuacion (1),
¿se podrıan determinar independientemente Icm y la masa de la barra? Razona

334 CAPITULO 11. PENDULO FISICO
la respuesta.
2. A partir del valor experimental obtenido para Icm, calcula mediante el teorema
de Steiner el momento de inercia de la barra respecto a un eje perpendicular que
pasa por uno de sus extremos.
3. ¿Que tipo de movimiento realiza la barra si el angulo de partida es suficientemente
pequeno? ¿Que fuerzas se desprecian para considerar que la barra realiza un
movimiento de ese tipo?
4. Demuestra teoricamente la ecuacion:
τ = −mgh senφ
¿Cuales seran la direccion y el sentido del vector ~τ en la figura?

Pendulo de torsion y momentos deinercia
Objetivos
Determinar la constante de un muelle espiral
Determinar el momento de inercia de varios solidos rıgidos
Comprobar la utilidad del teorema de Steiner
Material
• Tripode son soporte • Muelle espiral • Barrera fotoelectrica
• Disco metalico con orificios • Barra con pesas • Disco de plastico
• Cilindro Macizo • Esfera • Cilindro hueco
Fundamento teorico
Pendulo de torsion
En la figura se muestra un pendulo de torsion, que esta formado por un objeto
suspendido de un hilo que por el otro extremo esta unido a un punto fijo. Un muelle
espiral colocado de forma horizontal tambien se puede considerar como un pendulo de
torsion. Cuando el hilo o el muelle se giran un angulo θ, ejercen un momento que tiende
a devolver el objeto a su posicion inicial. Ese momento suele ser de la forma:
τz = −kθ (11.10)

336 CAPITULO 11. MOMENTOS DE INERCIA
donde el eje de giro se representa por z, τz es la componente del momento sobre el eje
de giro y k se denomina constante de torsion y depende de las propiedades elasticas
del hilo o del muelle.
θ
I
k
La segunda ley de Newton para la rotacion, aplicada a un cuerpo rıgido con simetrıa
de revolucion y de momento de inercia I, se puede expresar ası:
τz = Id2θ
dt2(11.11)
con lo que sustituyendo τz resulta la siguiente ecuacion diferencial:
Id2θ
dt2+ kθ = 0 (11.12)
Es sencillo comprobar que la solucion de esta ecuacion es de la forma:
θ(t) = θ0 cos(ωt+ δ) (11.13)
que representa un movimiento armonico simple de frecuencia y periodo:
ω =
(k
I
)1/2
; T =2π
ω= 2π
(I
k
)1/2
(11.14)
A diferencia del pendulo simple, en este caso no se ha necesitado en ningun momento
suponer que el angulo θ sea suficientemente pequeno para que la ecuacion diferencial
sea lineal. Es decir, en el caso del pendulo de torsion, siempre que el momento sea
proporcional al angulo girado, el sistema describe un movimiento armonico simple.

337
Teorema de Steiner (o de los ejes paralelos)
El momento de inercia de un solido rıgido no es una propiedad intrınseca del cuerpo
sino que depende del eje de giro respecto al que se calcule. Por esta razon en muchas
ocasiones es util conocer las ecuaciones que relacionan el momento de inercia respecto
a un eje con el momento respecto a otro diferente. Uno de los teoremas mas utilizados
en estas situaciones es el denominado teorema de los ejes paralelos o de Steiner, que
relaciona el momento de inercia respecto a un eje cualquiera con el momento relativo
a un eje paralelo al anterior y que pasa por el centro de masas del objeto.
z
y
x
dm
c.m.
x
y
x cm
y cm d
y'
r r'
O
x'
Consideremos un solido rıgido arbitrario de masa M , que tiene un momento de
inercia I respecto a un eje que pasa por el punto O y, como se muestra en la figura, es
perpendicular al plano del papel. Por definicion de momento de inercia:
I =
∫r2 dm =
∫ (x2 + y2
)dm (11.15)
Si consideramos ahora el momento de inercia del objeto en relacion a un eje de giro
paralelo al anterior y que pasa por su centro de masas, Icm, su definicion se expresarıa
ası:
Icm =
∫r′
2dm =
∫ (x′
2+ y′
2)dm (11.16)
donde ahora las coordenadas estan referidas a un sistema de referencia con origen en
el centro de masas y cuyos ejes son paralelos a los ejes x e y. La relacion entre los

338 CAPITULO 11. MOMENTOS DE INERCIA
vectores de posicion de un elemento infinitesimal de masa cualquiera, dm, vendra dada
por: ~r′ = ~r − ~d, donde ~d es el vector que une los orıgenes de los dos sistemas de
referencia. En coordenadas:
x2 = x′2
+ d2x + 2x′dx ; y2 = y′
2+ d2
y + 2y′dy (11.17)
Sustituyendo en la ecuacion de I y agrupando terminos:
I =
∫ (x′
2+ y′
2)dm+
∫ (d2x + d2
y
)dm+ 2
∫(x′dx + y′dy) dm (11.18)
De esta suma, el primer sumando representa Icm, en el segundo dx y dy son constantes
y resulta ser d2M y el tercero representa las coordenadas del centro de masas en el
sistema de referencia x′, y′, que es precisamente el sistema de centro de masas, o sea,
que es nulo. Por lo tanto:
I = Icm +M d2 (11.19)
Este resultado se conoce con el nombre de teorema de Steiner y relaciona los mo-
mentos de inercia relativos a dos ejes paralelos siempre que uno de ellos pase por el
centro de masas del objeto. d simplemente es la distancia entre los dos ejes.
Realizacion practica y resultados a obtener
Medida de la constante del muelle
La constante del muelle espiral se puede determinar utilizando las ecuaciones (11.14)
y (11.19). Sustituyendo una en otra:
T 2 =4π2
k
(Icm +M d2
)(11.20)
A partir de esta ecuacion se pueden obtener k e Icm sin mas que medir la dependencia
del periodo con la distancia del centro de masas al eje de giro.
1. Coloquese sobre el muelle el disco metalico con orificios y determınese el periodo
de la oscilacion para varias distancias del eje de giro al centro de masas (al menos
5).

339
2. Construye una tabla con la funcion T = T (d).
3. A partir de la tabla representese graficamente T 2 frente a d2 y por medio de un
ajuste por mınimos cuadrados determınese la constante del muelle, k (utiliza las
masas que aparecen en la tabla adjunta) en unidades del Sistema Internacional
e Icm.
¡Advertencia: siempre se midan periodos con la barrera fotoelectrica, repite 6 veces
la medida, 3 girando el muelle hacia la derecha y otras 3 hacia la izquierda. Toma luego
como periodo la media aritmetica de las 6 medidas!
Calculo de momentos de inercia
El momento de inercia se puede determinar a partir del periodo haciendo uso de la
ecuacion (11.14).
1. Determınese el periodo para todos los objetos mencionados en el apartado Ma-
terial, midiendo para cada uno de ellos el periodo 6 veces (3 hacia cada lado) y
tomando como valor mas probable el valor medio. Tengase en cuenta que para
la barra con pesas, I = Ibarra + 2Md2, donde M es la masa de cada pesa y d la
distancia entre ellas y el eje.
2. Una vez calculado T para cada uno de los objetos proporcionados, obtengase el
momento de inercia y comparese con los momentos teoricos de dichos cuerpos,
considerando los datos de la tabla adjunta. Calculense los errores absolutos y
relativos de los momentos de inercia.
Cuestiones
1. Demuestra que la ecuacion (11.13) junto con los valores de ω y T de la ecua-
cion (11.14) representa, efectivamente, una solucion de la ecuacion diferencial (11.12).
2. Explica detalladamente cada uno de los terminos de la ecuacion (11.18). ¿A traves
de que punto de un cuerpo debe pasar el eje de rotacion para que su momento
de inercia sea mınimo?

340 CAPITULO 11. MOMENTOS DE INERCIA
masa (kg) dimensiones (m)
Esfera 0.846 r=0.07Cilindro hueco 0.374 ri = 0,046, re = 0,050Cilindro macizo 0.378 r=0.0495Disco de plastico 0.297 r=0.11
Disco metalico (con orificios) 0.384 r=0.15Barra metalica 0.176 l=0.6
Pesas (cada una) 0.211
3. Calcula el momento de inercia de un sistema formado por cuatro masas puntuales
iguales distribuidas en los vertices de un rectangulo de lados a y b respecto a un
eje que coincide con la diagonal del rectangulo.
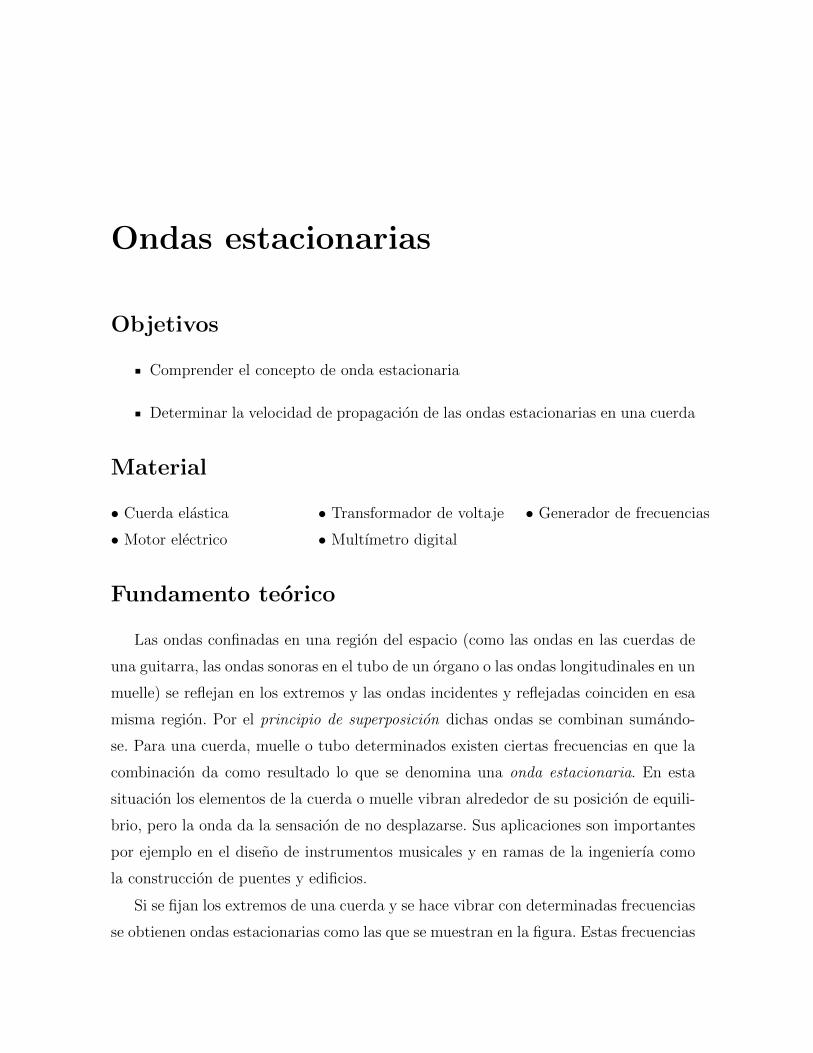
Ondas estacionarias
Objetivos
Comprender el concepto de onda estacionaria
Determinar la velocidad de propagacion de las ondas estacionarias en una cuerda
Material
• Cuerda elastica • Transformador de voltaje • Generador de frecuencias
• Motor electrico • Multımetro digital
Fundamento teorico
Las ondas confinadas en una region del espacio (como las ondas en las cuerdas de
una guitarra, las ondas sonoras en el tubo de un organo o las ondas longitudinales en un
muelle) se reflejan en los extremos y las ondas incidentes y reflejadas coinciden en esa
misma region. Por el principio de superposicion dichas ondas se combinan sumando-
se. Para una cuerda, muelle o tubo determinados existen ciertas frecuencias en que la
combinacion da como resultado lo que se denomina una onda estacionaria. En esta
situacion los elementos de la cuerda o muelle vibran alrededor de su posicion de equili-
brio, pero la onda da la sensacion de no desplazarse. Sus aplicaciones son importantes
por ejemplo en el diseno de instrumentos musicales y en ramas de la ingenierıa como
la construccion de puentes y edificios.
Si se fijan los extremos de una cuerda y se hace vibrar con determinadas frecuencias
se obtienen ondas estacionarias como las que se muestran en la figura. Estas frecuencias

342 CAPITULO 11. ONDAS ESTACIONARIAS
se denominan frecuencias de resonancia del sistema. La mas baja recibe el nombre de
frecuencia fundamental y el esquema que se produce armonico fundamental o primer
armonico. La segunda frecuencia a la que se produce onda estacionaria es justamente
el doble de la primera y el patron originado se llama segundo armonico. Y ası sucesi-
vamente.
Para cada armonico existen puntos del muelle que no se mueven. Se llaman nodos.
Y los puntos que tienen maxima vibracion antinodos o vientres. Como los extremos del
muelle estan fijos siempre son nodos. El primer armonico tiene un antinodo, el segundo
dos y ası progresivamente.
Se puede demostrar que si la longitud del muelle o cuerda es l su relacion con la
longitud de onda del armonico n-esimo, λn viene dada por:
l = nλn2
n = 1, 2, 3 . . . (11.21)
Esta ecuacion se suele denominar condicion de onda estacionaria porque indica para
una longitud dada las longitudes de onda que tienen las sucesivas ondas estacionarias.
En terminos de frecuencias:
fn =v
λn=v n
2 l(11.22)
donde v es la velocidad de propagacion de la onda. De otro modo:
fn = nv
2 l= n f1 n = 1, 2, 3 . . . (11.23)
donde f1 = v/2 l es la frecuencia fundamental.

343
n=1
n=2
n=3
n=4
n=5
l
A
A A
A A A
A A A A
A A A A A
N N
NN
N
Primer arm
ónico fundamental
Segundo armónico
Tercer armónico
Cuarto arm
ónicoQ
uinto armónico

344 CAPITULO 11. ONDAS ESTACIONARIAS
Realizacion practica
Una vez situado un extremo de la cuerda en el extremo fijo del soporte y el otro en el
motor electrico, fija su longitud aproximadamente en 52 cm. A continuacion conecta el
generador de frecuencias y localiza los primeros armonicos (hasta n = 6 o n = 7) para
esa longitud. Anota la frecuencia correspondiente a cada uno. Repite las medidas de
la frecuencia tres veces y utiliza el valor medio para los calculos subsiguientes. Vuelve
a seguir el procedimiento para otras 4 longitudes diferentes de la cuerda (por ejemplo
63, 73 y 83 cm).
¡Advertencias!
El generador de funciones debe estar situado siempre en el valor U/Vs = 3
Para localizar las frecuencias de resonancia el barrido se debe hacer de menor a
mayor valor de la frecuencia
¡ No tocar el motor bajo ningun concepto !
Resultados a obtener
1. Representa una tabla para cada una de las longitudes consideradas con los valores
de n y fn
2. Para cada una de las longitudes consideradas representa graficamente la frecuen-
cia de vibracion, fn frente a n.
3. Mediante ajuste por mınimos cuadrados de las graficas anteriores calcula la ve-
locidad de propagacion de la onda, v, para cada longitud (ec. (11.22)).
4. La velocidad de propagacion de una onda en una cuerda depende de la tension a
la que esta sometida y de su densidad lineal de masa, µ. Utilizando la ecuacion
correspondiente y sabiendo que para la cuerda empleada µ = 1,05 g/m, calcula
a partir de las velocidades obtenidas, la tension de la cuerda para cada longitud
en unidades del S.I.
345
Cuestiones
1. ¿Que diferencia hay entre un movimiento ondulatorio y un movimiento osci-
latorio? En el montaje de esta practica, ¿que elemento realiza un movimiento
oscilatorio?
2. ¿Por que las ondas estacionarias se denominan ası?
3. ¿Las ondas que se producen en esta practica son longitudinales o transversales?
¿Por que?
4. Una cuerda con ambos extremos fijos resuena con una frecuencia fundamental de
100 Hz. ¿Cual de las siguientes acciones reducira esa frecuencia a 50 Hz?
a) Duplicar la tension y duplicar la longitud
b) Mantener fija la tension y duplicar la longitud
c) Mantener fija la tension y reducir la longitud a la mitad


Conservacion de la energıa
Objetivos
Hacer un analisis de la conservacion de la energıa en un sistema con movimientos
de traslacion y rotacion
Determinar el momento de inercia de un disco
Material
• Tripodes son soporte y eje • Hilo • Ordenador
• Sensor de movimiento • Disco de Maxwell (r = 2,5± 0,01 mm; m = 527,0± 0,1 g)
Fundamento teorico
Consideramos como sistema un disco o volante sujeto por dos hilos a un eje fijo
de tal manera que al ser liberado desde una cierta altura desciende por accion de la
fuerza de la gravedad realizando tanto un movimiento de traslacion de su centro de
masas como un movimiento de rotacion alrededor de un eje. Considerando que los
rozamientos no son apreciables, el sistema es conservativo, la unica energıa potencial
sera la asociada a la fuerza gravitatoria.
Por lo tanto, si Ei es la energıa mecanica total en el instante inicial y Ef es la energıa
mecanica total en cualquier otro instante (por ejemplo, cuando el sistema este a una
altura h cualquiera), se verifica que Ei = Ef . Si se deja caer el sistema desde el reposo
la energıa inicial sera unicamente potencial gravitatoria y en cualquier otro instante
tendra una componente cinetica de traslacion, otra cinetica de rotacion y otra potencial
348 CAPITULO 11. CONSERVACION DE LA ENERGIA
gravitatoria. Eligiendo como origen de la energıa potencial gravitatoria la que tiene en
el instante f y considerando que la altura inicial respecto a f es h0,
mgh0 =1
2mv2 +
1
2Iω2 (11.24)
donde I es el momento de inercia de la rueda, v la velocidad de traslacion y ω la de
rotacion. Teniendo en cuenta que ω = v/r, donde r es el radio del volante y que en
un movimiento uniformemente acelerado que parte de reposo v2 = 2 a∆h, podemos
despejar v2 de la Ec. (11.24) e igualando obtener a:
a =mg
m+I
r2
(11.25)
La ecuacion de la altura en funcion del tiempo sera:
h(t) = h0 +1
2at2 (11.26)
donde h0 es la altura inicial.
Realizacion practica y resultados a obtener
Se deben enrollar los hilos sobre el eje movil del volante de forma que la densidad de
hilo enrollado sea similar a ambos lados del volante. Hay que tratar de evitar tambien
posibles balanceos nivelando bien los dos ejes, el fijo y el movil. Para hacerlo hay un
pequeno tornillo atado a uno de los hilos.
1. Se enrolla la cuerda para subir la rueda hasta el punto mas alto. En ese instante
se inicia la toma de datos en el ordenador, representando h = h(t).
2. Se hace un ajuste de la curva a una parabola para estimar la aceleracion, Ec. (11.26).
3. Una vez obtenida se calcula el momento de inercia de la rueda a partir de la
Ec. (11.25).
4. Utilizando el sensor de movimiento para medir velocidades comprueba la ecuacion
para la conservacion de la energıa en 8 alturas diferentes. Para ello se construye

349
una tabla con la energıa cinetica de traslacion, cinetica de rotacion y potencial
gravitatoria. Su suma, que es la energıa mecanica total, debe ser constante, y
aproximadamente independiente de la altura.
Cuestiones
1. ¿Como serıa la Ec. (11.24) si elegimos como origen de energıa potencial gravi-
tatoria la altura inicial? ¿Las demas ecuaciones que hemos planteado seguirıan
siendo validas?
2. Un CD digital contiene datos digitales de forma que cada bit ocupa 0,6 µm a
lo largo de una pista espiral continua que va desde la circunferencia interior del
CD hasta el borde exterior. Un reproductor de CD hace girar el disco para que
la pista pase por una lente a una velocidad constante de 1,30 m/s. Calcula la
velocidad angular que se necesita:
a) Al principio de la grabacion, donde la espiral tiene un radio de 2,30 cm.
b) Al final de la grabacion donde el radio es de 5,80 cm.
c) Una grabacion de maxima longitud dura 74 min 33 s. Calcula la aceleracion
angular media del disco.
d) Calcula la longitud total de la pista.
3. Big Ben, el reloj de la torre del Parlamento de Londres tiene una manecilla de
las horas de 2,70 m de longitud y una masa de 60 kg, mientras que la manecilla
de los minutos tiene 4,50 m de largo y masa 100 kg. Calcula la energıa cinetica
de rotacion total de las dos manecillas respecto a su eje de rotacion considerando
que son dos varillas delgadas de densidad uniforme.


Dilatacion de solidos y lıquidos
Objetivos
Determinar el coeficiente de dilatacion cubica de una sustancia lıquida.
Determinar el coeficiente de dilatacion lineal de un material solido.
Material
Termometro digital.
Calentador electrico y bano termico.
Matraz con dilatometro de lıquidos graduado en escala de 0,01 ml.
Dilatometro de solidos en escala de 0,01 mm y soporte para varillas.
Varillas huecas de diversos materiales (Al, Cu, bronce, . . . )
Fundamento teorico
Coeficiente de dilatacion cubica de lıquidos
Se define como la variacion de volumen del lıquido cuando experimenta un cambio
de temperatura a presion constante, por ejemplo cuando el material se encuentra bajo
la presion atmosferica. Matematicamente, se define del siguiente modo:
α =1
V
(∂V
∂T
)P
(11.27)

352 CAPITULO 11. DILATACION DE SOLIDOS Y LIQUIDOS
En el Sistema Internacional de Unidades se mide en K−1. El orden de magnitud de
α para lıquidos es de 10−4 − 10−3 (K−1) aunque depende de la temperatura y presion
a que se encuentre el material. Para la mayorıa de las sustancias α es positivo (lo
que significa que, por ejemplo, un incremento de temperatura provoca un aumento
de volumen) pero para algunas (agua entre 0◦
C y 4◦
C y algunos polımeros) α es
negativo. Este hecho se denomina dilatacion anomala. En el caso del agua esto se pone
de manifiesto cuando se observa que el agua lıquida al congelarse por debajo de 0◦
C
aumenta su volumen, esto es, se dilata.
Una utilidad fundamental de los coeficientes termicos es que su conocimiento per-
mite la determinacion de la variacion de unas variables del sistema en funcion de otras.
Por ejemplo, en el caso de α, si consideramos que permanece constante en un cierto
intervalo de temperaturas, de la integracion de la ecuacion anterior entre dos estados i
y f cualesquiera, resulta:
Vf = Vi eα(Tf−Ti) (11.28)
Esta ecuacion permite conocer el volumen del lıquido a cualquier temperatura Tf
sin mas que conocerlo previamente a la temperatura Ti.
Para determinar experimentalmente α llamemos a la temperatura inicial, T0, y
consideremos que las variaciones de volumen son pequenas en comparacion con el
propio volumen del sistema. Es decir, si V es el volumen a una temperatura cualquiera,
consideraremos que V ' V0 donde V0 es el volumen a la temperatura T0. Haciendo un
desarrollo en serie de Taylor a primer orden de la ecuacion (11.28), se obtiene:
V − V0 = αV0(T − T0) (11.29)
Basta representar graficamente V − V0 frente a T − T0 y hacer un ajuste lineal para
obtener α a partir de la pendiente correspondiente.
Coeficiente de dilatacion lineal de solidos
En el caso de solidos se puede definir un coeficiente de dilatacion cubica de for-
ma analoga al anterior sin mas que sustituir la presion por la tension, τ , a la que

353
esta sometido el material. De este modo:
α =1
V
(∂V
∂T
)τ
(11.30)
Para solidos aproximadamente unidimensionales (varillas) se define de forma analoga
un coeficiente de dilatacion lineal del siguiente modo:
αl =1
l
(∂l
∂T
)τ
(11.31)
donde l representa la longitud de la varilla en unas ciertas condiciones de temperatura
y tension aplicada. A temperatura ambiente el orden de magnitud de αl suele ser
10−6 − 10−5 (K−1). Razonando igual que en el caso de lıquidos, la longitud de una
varilla a una temperatura cualquiera, Tf , se puede conocer sabiendo su longitud a otra
temperatura, Ti, y suponiendo que αl no cambia apreciablemente en el intervalo Ti−Tf ,utilizando la relacion:
lf = li eαl(Tf−Ti) (11.32)
Experimentalmente, αl se calcula de modo analogo a α, a partir de la ecuacion:
l − l0 = αll0(T − T0) (11.33)
Realizacion practica
Conecta el calentador y anota cada 5◦C el aumento de volumen del lıquido, V −V0
y de longitud de la varilla, l− l0 y la temperatura, T , desde la temperatura ambiente,
T0, hasta una temperatura final aproximada de 60◦C. Repite el proceso con los otros
lıquidos o solidos que se propongan.
Resultados a obtener
1. Representa graficamente V − V0 frente a T − T0 para el lıquido considerado. A
partir de un ajuste lineal de esa curva (utilizando la ecuacion (11.29)), y sabiendo
que V0 para el matraz utilizado vale 78 ml, determina α.

354 CAPITULO 11. DILATACION DE SOLIDOS Y LIQUIDOS
2. Representa graficamente l − l0 frente a T − T0 para cada varilla considerada. A
partir de un ajuste lineal de esa curva (utilizando la ecuacion (11.33)), y sabiendo
que l0 = 60 cm, determina, αl.
Cuestiones
1. En el laboratorio se ha determinado que el coeficiente de dilatacion lineal de una
varilla de acero vale 1,1× 10−5 (K−1) a una temperatura aproximada de 25◦C. Si
su longitud a esa temperatura es de 38 cm, ¿cual es su longitud a 50◦
C?
2. Al determinar el coeficiente de dilatacion cubica de los lıquidos, ¿habrıa que tener
en cuenta que al calentar el lıquido se dilata el recipiente que lo contiene? Sabiendo
que el coeficiente de dilatacion cubica del vidrio es del orden de 9,0× 10−6 (K−1),
¿de que orden serıa la correccion a considerar?
3. Sabiendo que la ecuacion termica de estado de un gas ideal es PV = nRT , ¿cual
es el coeficiente de dilatacion cubica para un gas de este tipo?
4. Representa de forma aproximada una grafica volumen-temperatura para el agua
si inicialmente su temperatura son +10◦
C y se disminuye progresivamente hasta
alcanzar −10◦
C.

Ecuacion de estado del gas ideal
Objetivos
Comprobacion de la ecuacion de estado del gas ideal experimentalmente
Construccion de curvas a presion, temperatura o volumen constante
Material
Bomba/calentador electrico
Termostato
Termometro y barometro
Dispositivo para la determinacion de volumenes y presiones
Fundamento teorico
El establecimiento empırico de la ecuacion termica de los gases ideales se basa en los
experimentos realizados por R. Boyle y E. Mariotte en el siglo XVII y J.L. Gay-Lussac
a comienzos del siglo XIX.
R. Boyle demostro experimentalmente que los gases en condiciones de alta tempera-
tura y/o baja presion verifican que: ”a temperatura constante el producto de la presion
por el volumen permanece constante”, es decir que, en condiciones isotermas presion y
volumen son inversamente proporcionales:
PV = A (T=cte.) (11.34)

356 CAPITULO 11. GAS IDEAL
donde A es una constante. Esta ecuacion fue tambien descubierta por E. Mariotte y
por ello se denomina ley de Boyle-Mariotte.
De modo similar, J.L. Gay-Lussac puso de manifiesto que ” manteniendo constante
la presion, el volumen de un gas varıa proporcionalmente con la temperatura”
V = BT (P=cte.) (11.35)
dondeB es una constante. Por otra parte tambien dedujo que ” manteniendo el volumen
constante, la presion de un gas varıa proporcionalmente a la temperatura”
P = CT (V=cte.)
donde C es una constante. Estas dos ecuaciones se conocen con el nombre de leyes de
Gay-Lussac.
La combinacion de todas estas ecuaciones (manteniendo siempre fijo el numero de
moles del gas) da lugar a la siguiente relacion:
PV = KT (11.36)
dondeK es una constante que puede calcularse mediante la ley de Avogadro: ”un nume-
ro igual de moles de gases diferentes ocupan el mismo volumen cuando se encuentran
a la misma presion y temperatura”. Este volumen es 22,4 l cuando la cantidad de gas
es 1 mol, la presion es 1 atm y la temperatura 0o C. Esto lleva a escribir la Ec. (11.36)
como:
PV = nRT (11.37)
siendo n el numero de moles y
R = 0,082atm.l
mol.K= 8,314
J
mol.K= 1,984
cal
mol.K
La ecuacion (11.37) se conoce como ecuacion termica de estado para el gas ideal
y proporciona buenos resultados teoricos en comparacion con los experimentales para
gases reales a altas temperaturas y/o bajas densidades.

357
Realizacion practica
Medida de temperaturas
El dispositivo experimental consta de dos recipientes de vidrio conectados entre
sı por un tubo de goma en forma de U que contiene mercurio. El primer recipiente
es la camara que contiene n moles del gas (aire) que constituye el sistema de
trabajo. Esta camara esta rodeada de una camisa de vidrio por la que circula agua
permitiendo ası fijar la temperatura del sistema. Las temperaturas se seleccionan
con el motor-calentador situado sobre el deposito de agua. El segundo recipiente
contiene una reserva de mercurio que puede desplazarse verticalmente para variar
la presion y el volumen del gas.
Medida de volumenes
La regla vertical al lado de la camara del gas esta graduada en cm (trazos gruesos)
y mm (trazos finos), para determinar el volumen del gas. La seccion de la camara
es de 1 cm2 por lo que el volumen se mide directamente en cm3 sin mas que medir
alturas.
Medida de presiones
Por otra parte, la presion del gas en la camara se calcula midiendo diferencia de
alturas en la regla graduada y utilizando la ecuacion:
P = P0 ±∆P ; ∆P = ρg∆h
donde P0 es la presion atmosferica medida en el barometro del laboratorio, ρ
es la densidad el mercurio y ∆h la diferencia de altura entre las dos ramas de
mercurio. De hecho el aparato esta disenado de modo que midiendo directamente
∆h, se obtiene P − P0 en unidades de mmHg.
Resultados a obtener
1. Isotermas
358 CAPITULO 11. GAS IDEAL
Empezando a temperatura ambiente, construye 3 isotermas a intervalos de 10
grados de temperatura (haciendo la primera a temperatura ambiente). Para cada
una de ellas efectua entre 6 y 8 medidas de P y V . Representa las tablas con los
resultados para cada una y haz un diagrama P − V con las 3 isotermas. Si para
cada isoterma se repiten los valores de volumen de la anterior, los mismos datos
tomados aquı se pueden utilizar en el apartado siguiente.
2. Comprobacion de la ley de Boyle-Mariotte
Segun la Ec. (11.34), cuando la temperatura permanece constante, presion y
volumen son inversamente proporcionales. Representa graficamente P frente a
1/V para cada isoterma y haz el ajuste por mınimos cuadrados de cada una.
3. Calculo del numero de moles
Calcula el numero de moles de aire contenidos en el tubo de medida utilizando:
lımP→0
PV
RT= n
Para ello representa graficamente PV/RT frente a P para las 3 temperaturas de
las isotermas. Se obtendran rectas cuyo puntos de corte con el eje vertical deben
coincidir y se corresponden aproximadamente con n.
4. Isocoras
Construye varias isocoras, utilizando los datos tomados en el apartado anterior.
Representa las tablas de P frente a T correspondientes y un diagrama P −T con
todos los datos.
5. Comprobacion de la ley de Gay-Lussac
Segun la Ec. (IV), a volumen constante P y T son directamente proporcionales.
Haz un ajuste por mınimos cuadrados de cada una de las isocoras (P frente a T )
del apartado anterior para comprobar que efectivamente se verifica la ley.

359
Cuestiones
1. ¿En que condiciones de presion, volumen y temperatura se puede considerar un
gas como ideal?
2. Microscopicamente, ¿como es un gas ideal? ¿Que diferencias basicas existen entre
un gas ideal y uno real?
3. Un globo de forma esferica (radio 18 cm) esta lleno de helio a temperatura am-
biente (20o C) y presion 1,05 atm. Calcula el numero de moles de helio que
contiene el globo y la masa correspondiente.
4. Un neumatico de automovil se infla a una presion de 200 kPa a 10o C. Si despues
de conducir 100 kms, la temperatura dentro del neumatico ha aumentado 40o C,
¿cual es la presion en su interior? (Supongase que el proceso es isocoro).
5. ¿Cuantas moleculas se inhalan aproximadamente al inspirar 1 l de aire en condi-
ciones normales?


Bibliografıa
Bibliografıa basica
P.A. Tipler y G. Mosca, Fısica (Reverte, 2010) 6a Edicion.
R.A. Serway, Fısica para Ciencias e Ingenierıa (Thompson, 2009) 7a Edicion.
W.E. Gettys, F.J. Keller, M.J. Skove, Fısica para Ingenierıa y Ciencias (McGraw-
Hill, 2005) 2a Edicion.
F.P. Beer, Mecanica vectorial para ingenieros (McGraw-Hill, 2007) 8a Edicion.
Bibliografıa complementaria
F.A. Gonzalez Hernandez, La Fısica en problemas, (Tebar, 2000).
C. Fernandez Pineda y S. Velasco, Introduccion a la Termodinamica (Sıntesis,
2009).
C.P. Jargodzki and F. Potter, Mad About Physics (John Wiley, 2001).
L.A. Bloomfield, How Things Work (John Wiley, 2001).
P. Gnadig, G. Honyek and K. Riley, 200 Puzzling Physics Problems (Cambridge,
2001).
F. Esquembre, FISLETS : ensenanza de la fısica con material interactivo (Pear-
son, 2004).

362 CAPITULO 11. BIBLIOGRAFIA
Paginas web
www.sc.ehu.es/sbweb/fisica/default.htm
phet.colorado.edu

Indice alfabetico
Angulo crıtico, 74
Accion-reaccion, 63
principio, 59
Aceleracion
angular, 35
centrıpeta, 31, 44
centrıpeta de la Tierra, 61
de Coriolis, 44
instantanea, 23
media, 23
normal, 31
tangencial, 31
Acelerador de partıculas, 130
Afelio, 159
Aislante termico, 271
Alcance, 38, 65
Altura maxima, 38
Amortiguamiento crıtico, 217
Amplitud, 200, 232, 239
Analisis
de Fourier, 221
Anarmonico, 215
Antinodo, 246
Aristoteles, 57
Armonico, 221, 246
Arquımedes
principio de, 181
Bomba de calor, 292
Caıda libre, 27
Caballo de vapor
unidad de potencia, 98
Calidad
factor de, 217
Calor especıfico, 287
Campo, 67
gravitatorio, 68
Cantidad de movimiento, 62, 122
Capacidad calorıfica, 287
Centro de masas
sistema continuo, 119
sistema discreto, 117
Ciclo de Carnot, 294
Cinematica, 19
Clapeyron
diagrama de, 281
Coeficiente
de friccion cinetica, 72
de friccion estatica, 71
363

364 INDICE ALFABETICO
de friccion por rodadura, 76
de restitucion, 128
Coeficiente adiabatico, 297
Colision, 124
elastica, 125
inelastica, 125
perfectamente inelastica, 125
Componentes, 270
Compresibilidad
modulo, 256
Condicion de onda estacionaria, 246
Condiciones
de contorno, 246
iniciales, 202
Conservacion
de la energıa, 107
del momento angular, 157
del momento lineal, 123
Conservativa
fuerza, 100
Constante
de tiempo, 217
del movimiento, 123
elastica, 172
universal de los gases, 277
Coulomb
ley de, 64
Criterio egoısta, 278
Cuerpo rıgido, 139
Curva esfuerzo-deformacion, 169
Decibelio, 258
Deformacion relativa, 168
Densidad, 119
del aire, 179
lineal, 119
superficial, 119
Desarrollo en serie, 7, 179, 208
Descripcion
macroscopica, 269
microscopica, 269
Desfase inicial, 201, 241
Diagrama
deformacion-tiempo, 170
Diferencial inexacta, 97, 280
Difraccion, 254
Dimension, 6
Dinamica, 19, 57
Dina
unidad de fuerza, 62
Dinamometro, 59
Ecuacion
de Bernoulli, 187
de continuidad, 185
de estado del gas ideal, 277
de la trayectoria, 38
de ondas, 248
dimensionalmente homogenea, 6
empırica de estado, 276
fundamental de la calorimetrıa, 287
Efecto Venturi, 187
INDICE ALFABETICO 365
Elastico
regimen, 168
Energıa
cinetica, 100
cinetica de rotacion, 141
de las ondas armonicas, 242
de un MAS, 205
interna, 285
mecanica, 107
potencial, 101
Entorno, 270
Equilibrio
estable, 104
indiferente, 104
inestable, 104
mutuo, 271
neutro, 104
termodinamico, 272
Equivalente mecanico del calor, 284
Ergio
unidad de energıa, 94
Escala
absoluta de temperaturas, 275
Celsius, 276
Escala termometrica, 274
Esfuerzo, 168
Estatica, 19
Estado
gaseoso, 174
lıquido, 174
solido, 174
termodinamico, 271
Eter, 39
Factor de calidad, 217
Fase, 201, 270
Figuras de Lissajous, 212
Fluido
compresible, 177
ideal, 183
incompresible, 177
newtoniano, 189
no viscoso, 184
viscoso, 188
Flujo
estacionario, 183
irrotacional, 184
laminar, 184
turbulento, 184
Foco emisor, 250
Foucault
pendulo, 46
Fourier
teorema de, 220
Frecuencia, 201, 232, 240
angular, 201, 240
de resonancia, 246
fundamental, 246
movimiento de rotacion uniforme, 34
Frente
de ondas, 250

366 INDICE ALFABETICO
esferico, 250
Friccion
cinetica, 70
estatica, 70
por rodadura, 75
Frontera, 270
Fuente
de calor, 291
de trabajo, 291
Fuerza, 58, 62
centrıfuga, 80
central, 158
conservativa, 100, 107
constante, 101
de arrastre en fluidos, 76
de contacto, 68
de empuje, 181
de rozamiento, 70
de rozamiento viscosa, 189
de sustentacion, 188
externa, 121
ficticia, 79
interna, 121
media, 131
no conservativa, 109
normal, 64
periodica, 218
Fuerzas
internas, 121
Funcion
de ondas, 233
Funcion de estado, 273
Galileo, 57
Gradiente, 106
Herzio, 34
unidad de frecuencia, 201
Histeresis, 170
Historia elastica, 170
Hooke
ley de, 171
Huygens
princpio de, 251
Impulso, 131
Inercia
principio, 59
Inercial
masa, 61
sistema de referencia, 61
Integral
de lınea, 96
Intensidad
de una onda, 251
del sonido, 258
Interaccion
material, 271
mecanica, 271
termica, 271
termodinamica, 270
electromagnetica, 65

INDICE ALFABETICO 367
gravitatoria, 65
nuclear debil, 66
nuclear fuerte, 66
Interferencia, 234
constructiva, 234, 244
destructiva, 234, 244
Interferencia de ondas, 243
Invariante
magnitud, 41
Julio
unidad de energıa, 94
Lennard-Jones
potencial, 105
Ley
de Kuhn, 171
de Hooke, 168, 171, 204
de Poiseuille, 190
de Stokes, 77
Ligaduras
externas, 271
internas, 271
termodinamicas, 271
Lımite elastico, 168
Lınea de corriente, 184
Longitud de onda, 232, 239
Maquina termica, 292
Mınimo local, 214
Magnitud
invariante, 41
adimensional, 7
derivada, 3
escalar, 3
fundamental, 3
termodinamica, 270
vectorial, 3
Masa, 58
inercial, 61
Mecanica
clasica, 19
cuantica, 20
relativista, 19
Medida
patron, 3
unidad, 3
Modulo
de cizalladura, 172
de compresibilidad, 173, 256
de Young, 172
Momento
angular, 150
de inercia, 141
de una fuerza, 153
lineal, 62, 122
Motor termico, 292
Movimiento
armonico simple, 200
bidimensional, 20
circular, 33
circular uniforme, 34

368 INDICE ALFABETICO
circular uniformemente acelerado, 35
constante del, 123
de rotacion, 139
ondulatorio, 229
oscilatorio, 199
parabolico, 36
periodico, 34, 199
relativo, 38
relativo de rotacion uniforme, 42
relativo de traslacion uniforme, 40
unidimensional, 20
uniforme, 23
uniformemente acelerado, 23
Movimiento armonico
amortiguado, 215
sobreamortiguado, 216
subamortiguado, 216
Muelle
horizontal, 94
vertical, 206
Newton, 58
unidad de fuerza, 62
Nodo, 246
Notacion cientıfica, 9
Numero de ondas, 240
Numero de Reynolds, 191
Observador
inercial, 80
no inercial, 81
Onda
armonica, 239
longitudinal, 255
Ondas
bidimensionales, 250
de desplazamiento, 255
de presion, 255
electromagneticas, 229
estacionarias, 230, 245
lineales, 234
longitudinales, 231
mecanicas, 229
planas, 250
sonoras, 255
transversales, 230
viajeras, 229
Orden de magnitud, 10
Oscilacion forzada, 217
Pared
adiabatica, 271
diatermica, 271
termodinamica, 271
Partıcula, 20
Pascal
principio de, 180
unidad de presion, 172
Patron de medida
accesibilidad, 4
aceptabilidad, 4
estabilidad, 4
reproducibilidad, 4

INDICE ALFABETICO 369
seguridad, 4
Pendulo
balıstico, 128
de Foucault, 46
de torsion, 210
fısico, 209
simple, 208
Perihelio, 159
Periodicidad
espacial, 240
temporal, 240
Periodo, 34, 201, 240
Peso, 68
aparente, 69
Plasma, 176
Poise
unidad de viscosidad, 190
Poiseuille
ley de, 190
Potencia, 98
de rotacion, 160
Potencial
Lennard-Jones, 105
Precision, 4
Presion
atmosferica, 178
definicion general, 176
Principio
de accion-reaccion, 59
de Arquımedes, 181
de conservacion de la energıa, 110
de Huygens, 251
de inercia, 59
de Pascal, 180
de superposicion, 59, 245
Proceso
cıclico, 273, 281
cuasiestatico, 273, 280
infinitesimal, 273
irreversible, 273, 294
isobaro, 273
isocoro, 273
isotermo, 273
reversible, 273, 294
termodinamico, 273
Pulsos unidimensionales, 232
Punto de retorno, 108
Punto de ruptura o fractura, 168
Punto material, 20
Radio de la Tierra, 44
Rayo, 250
Reflexion
de ondas, 236, 253
Refraccion, 253
Refrigerador, 292
Rendimiento, 292
Resistencia al flujo, 189
Resonancia, 219
Rotacion terrestre, 44
Segunda ley de Newton para la rotacion,

370 INDICE ALFABETICO
153
Sıntesis de Fourier, 221
Sistema
de coordenadas, 20
discreto de partıculas, 117
abierto, 270
aislado, 270
cegesimal, 5
cerrado, 270
continuo de partıculas, 119
de unidades, 4
expansivo, 279
heterogeneo, 120
hidrostatico, 273
homogeneo, 120
Internacional de unidades, 4
monocomponente, 270
multicomponente, 270
simple, 273, 279
tecnico ingles, 5
termodinamico, 269
Sistema aislado, 123
Sistema de referencia
del centro de masas, 124
del laboratorio, 123
Sistemas de referencia
inerciales, 61
Sobretono, 221
Solucion
estacionaria, 218
transitoria, 218
Steiner
teorema de, 148
Stokes
ley de, 77
Superposicion de ondas, 234
Temperatura, 273
empırica, 274
gas ideal, 275
Teorema
de los ejes paralelos, 148
de Steiner, 148
trabajo-energıa de la rotacion, 160
Carnot, 295
de Fourier, 220
de los ejes perpendiculares, 150
generalizado trabajo-energıa, 109
trabajo-energıa, 100
termometro, 274
Terminos anarmonicos, 215
Termodinamica
Primer Principio, 285
Principio Cero, 274
Segundo Principio, 293
temperatura, 295
Tiempo
de vuelo, 38
Timbre, 221
Tono, 221
Trabajo
INDICE ALFABETICO 371
coordenadas de, 279
de rotacion, 160
expresion general, 96
infinitesimal, 93
neto, 97
termodinamico, 278
Transformacion galileana, 41
Transformada de Fourier, 221
Transmision de ondas, 236
Tren de ondas, 241
Umbral
de audicion, 258
de dolor, 258
Unidad de presion
atmosfera, 176
bar, 176
milımetro de mercurio, 176
pascal, 176
Universo termodinamico, 270
Variable
de composicion, 272
de estado, 273
especıfica, 272
extensiva, 272
intensiva, 272
mecanicas, 272
molar, 272
termicas, 272
termodinamica, 272
termometrica, 274
Variables conjugadas, 279
Vector
de posicion, 21
unitario, 29
Velocidad
media, 21
angular, 33
de fase, 233
de propagacion, 232, 237
del sonido, 257
instantanea, 22, 28
media, 28
relativa, 39
Venturi
efecto, 187
Viscosidad, 77, 189
Watio
unidad de potencia, 98
Young
modulo de, 172
Zona plastica, 168