El p´endulo invertido: un banco de pruebas para el … · El p´endulo invertido: un banco de...
35
El p´ endulo invertido: un banco de pruebas para el control no lineal Javier Aracil and Francisco Gordillo Escuela Superior de Ingenieros Universidad de Sevilla XXV Jornadas de Autom´ atica Ciudad Real, 8-10 septiembre 2004
Transcript of El p´endulo invertido: un banco de pruebas para el … · El p´endulo invertido: un banco de...

El pendulo invertido:
un banco de pruebas para el control no lineal
Javier Aracil and Francisco Gordillo
Escuela Superior de Ingenieros
Universidad de Sevilla
XXV Jornadas de Automatica
Ciudad Real, 8-10 septiembre 2004
Outline
1. Introduction to the inverted pendulum.
2. Potential energy shaping.
3. A damping-pumping strategy.
4. A control law stopping the car for the swing up problem.
5. Periodic oscillations in the inverted pendulum.
6. Conclusions.
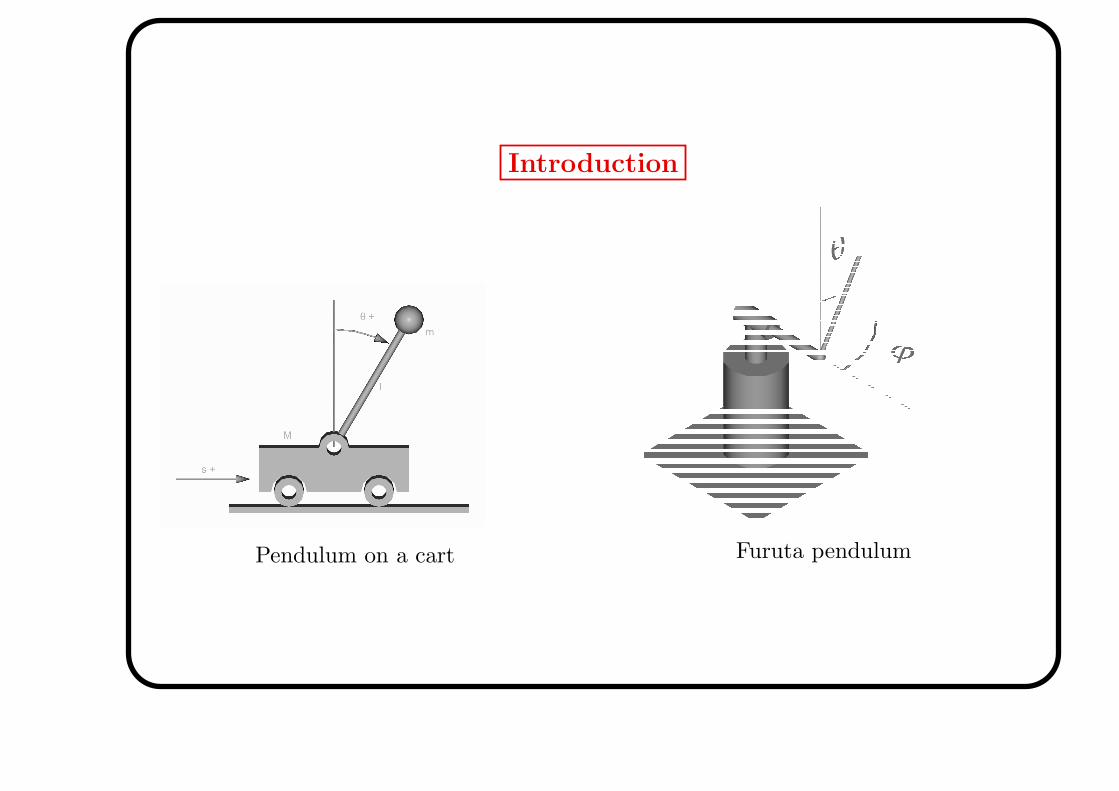
Introduction
Pendulum on a cart Furuta pendulum
The swing-up problem
Solutions for the inverted pendulum
Many
Problems
Hybrid Control
Balancing
Swing-up
Single Law
Commuting
Smooth ...?
Energy injection
• Single pendulum model
Jθ = mgl sin θ + u cos θ.
• Single pendulum energy
E =1
2Jθ2 + mgl(cos θ − 1),
• then
E = uθ cos θ,
• and the controller is
u = k(Eref − E)θ cos θ.
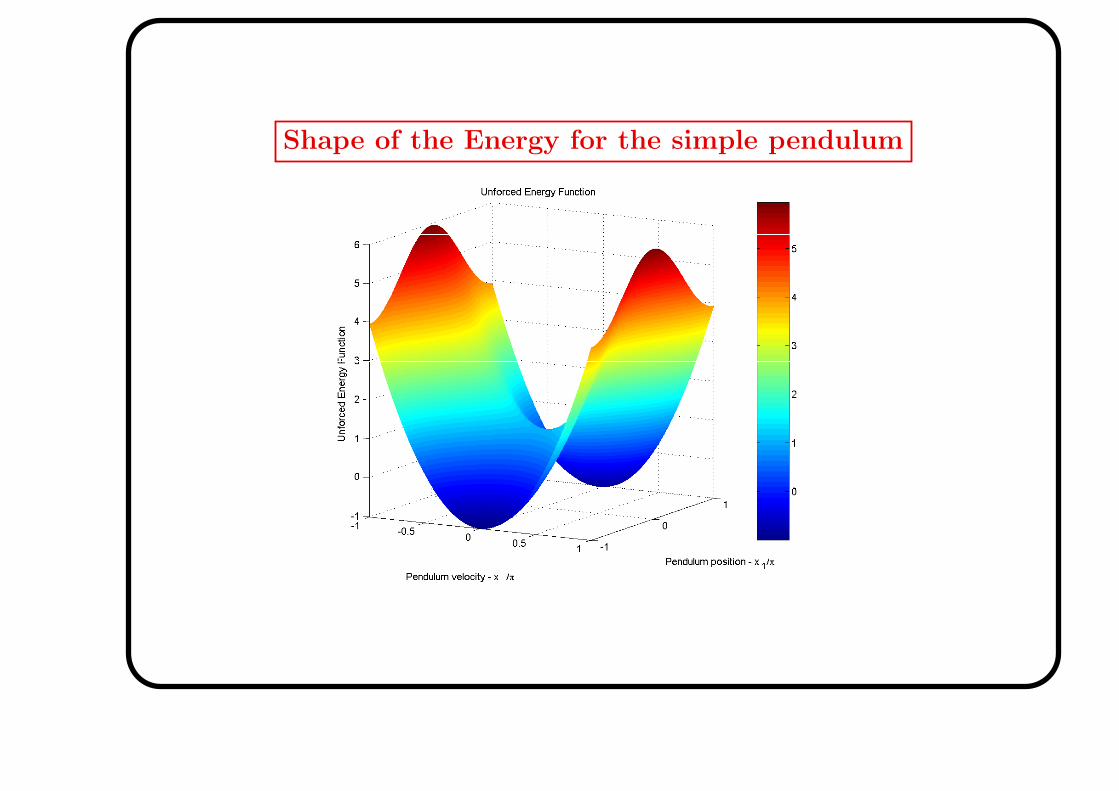
Shape of the Energy for the simple pendulum

Full system model
• Full system model
(Jp + mℓ2)(θ − ϕ2 sin θ cos θ) + mrℓϕ cos θ − mgℓ sin θ = 0
mrℓθ cos θ − mrℓθ2 sin θ + 2(Jp + mℓ2)θϕ sin θ cos θ
+(J + mr2 + (Jp + mℓ2) sin2 θ)ϕ = F.
• Partially linearized model
x1 = x2
x2 = sinx1 − cos x1u
x3 = u
• The best-known swing-up law (M. Wiklund et al., 1993; Astrom and Furuta, 2000)
is based on a dimension 2 model.
• Dimension two model neglects the reaction torques from the pendulum to the arm.
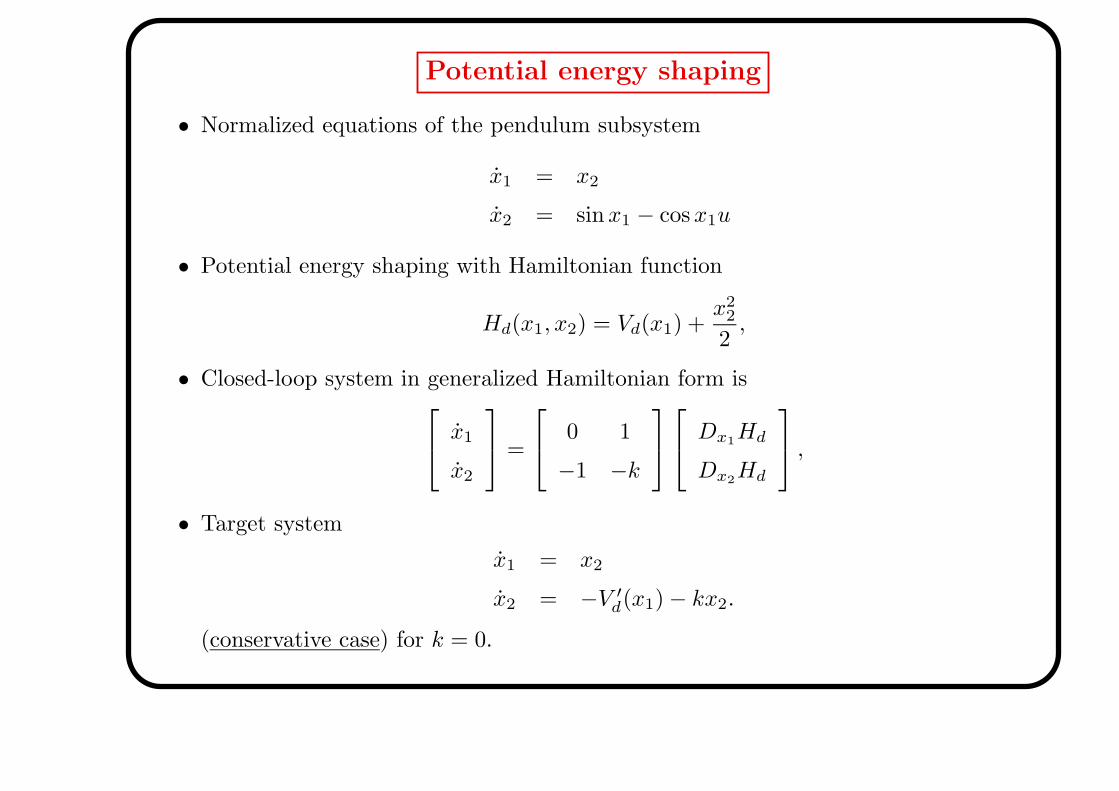
Potential energy shaping
• Normalized equations of the pendulum subsystem
x1 = x2
x2 = sinx1 − cos x1u
• Potential energy shaping with Hamiltonian function
Hd(x1, x2) = Vd(x1) +x2
2
2,
• Closed-loop system in generalized Hamiltonian form is x1
x2
=
0 1
−1 −k
Dx1
Hd
Dx2Hd
,
• Target system
x1 = x2
x2 = −V ′
d(x1) − kx2.
(conservative case) for k = 0.
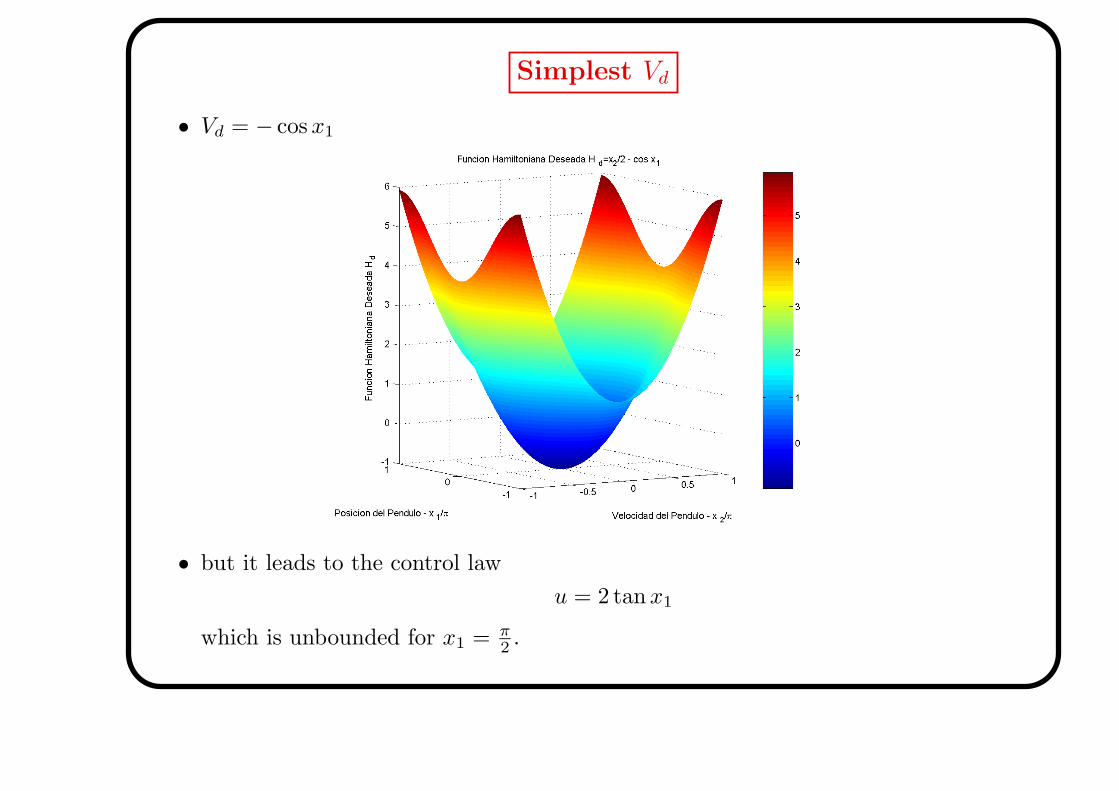
Simplest Vd
• Vd = − cos x1
• but it leads to the control law
u = 2 tanx1
which is unbounded for x1 = π2.
Solving the matching problem
• Vd should be such that
V ′
d = − sinx1 − cos x1β(x1),
and, for the conservative case u = β(x1).
• Good choice for β(x1) = sinx1β(cos x1).
• Further conditions Vd(x1) = Vd(−x1) and V ′
d(x1) = −V ′
d(−x1).
•
Vd = a0 + cos x1 − a2 cos2 x1 − a3 cos3 x1 − · · · ,
and then
V ′
d = Dx1Vd = − sinx1 + 2a2 sinx1 cos x1 + 3a3 sinx1 cos2 x1 + ...
= − sinx1 + sinx1 cos x1(2a2 cos x1 + 3a3 cos2 x1 + ...),

Shape of Hd for different Vd
−10
1
−1
0
1−10
−5
0
5
x2/π
Hd=x
22/2 + cosx
1 − 2cos2x
1
x1/π
Hd
−10
1
−1
0
1−10
−5
0
5
x2/π
Hd=x
22/2 + cosx
1 − 2cos2x
1 − 2cos3x
1
x1/π
Hd
−10
1
−1
0
1−20
−10
0
10
x2/π
Hd=x
22/2 + cosx
1 − 2cos2x
1 − 2cos3x
1 − 2cos4x
1
x1/π
Hd
−10
1
−1
0
1−20
−10
0
10
x2/π
Hd=x
22/2 + cosx
1 − 2cos2x
1 − 2cos3x
1 − 2cos4x
1 − 2cos5x
1
x1/π
Hd
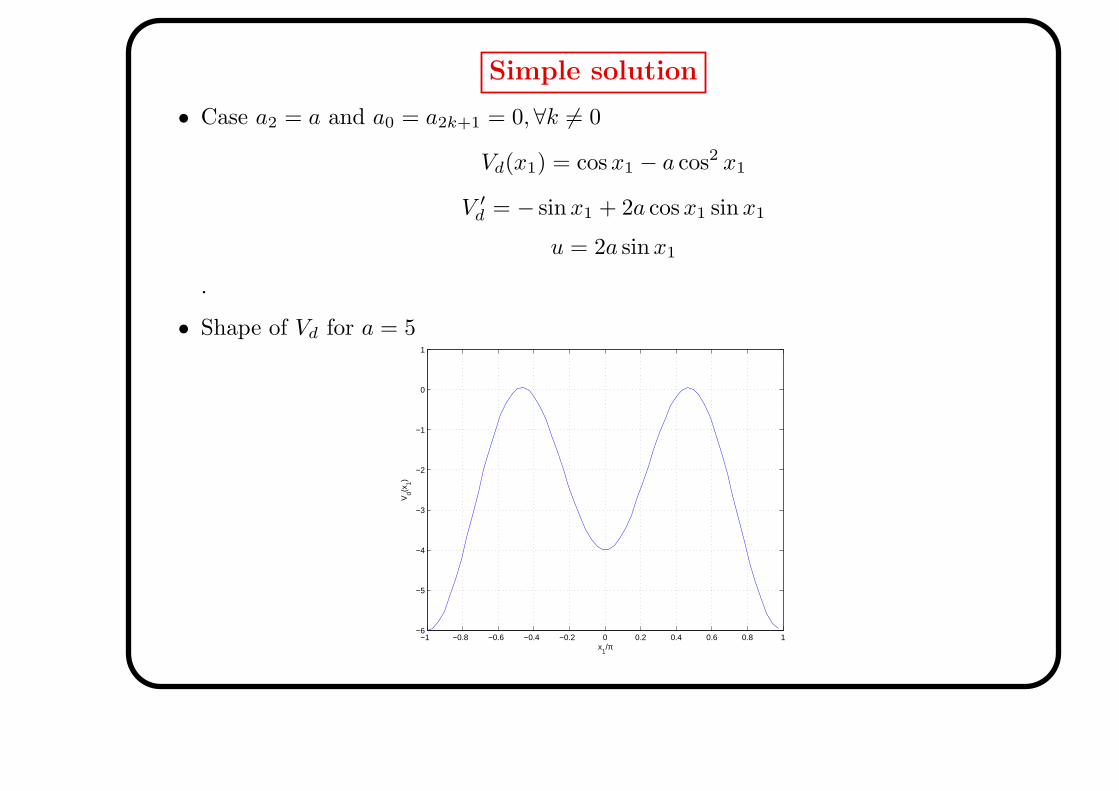
Simple solution
• Case a2 = a and a0 = a2k+1 = 0,∀k 6= 0
Vd(x1) = cos x1 − a cos2 x1
V ′
d = − sinx1 + 2a cos x1 sinx1
u = 2a sin x1
.
• Shape of Vd for a = 5
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−6
−5
−4
−3
−2
−1
0
1
x1/π
Vd(x
1)
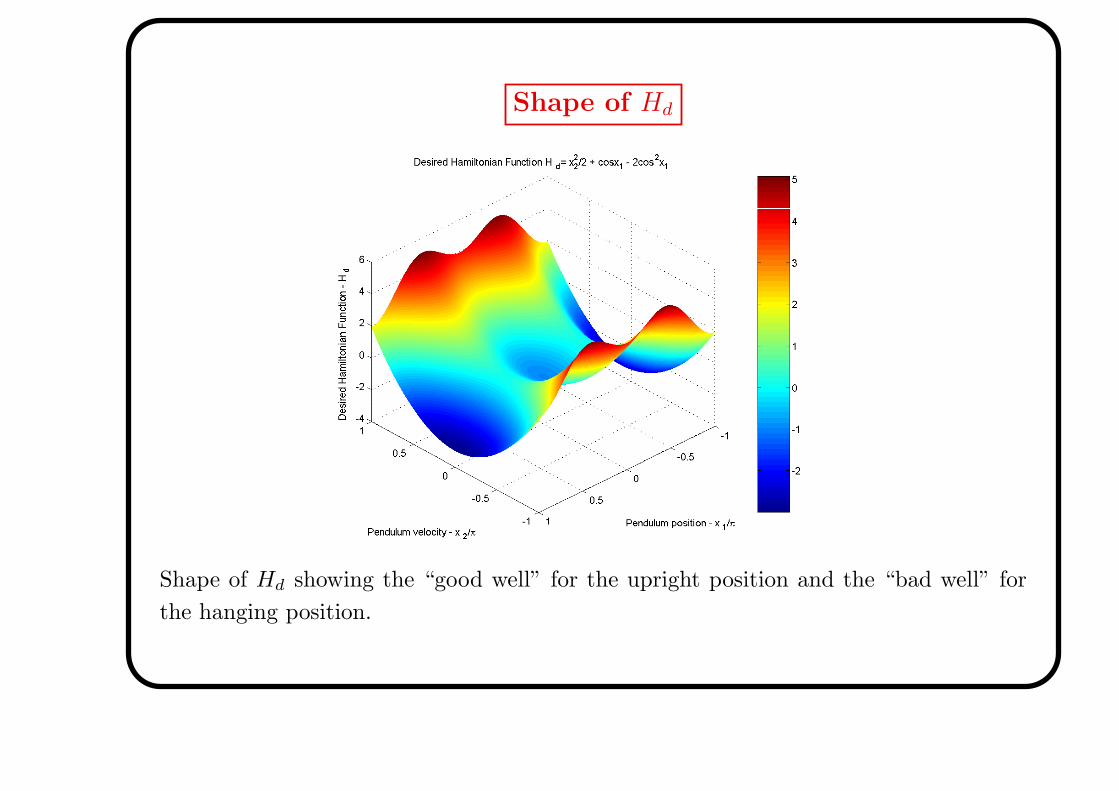
Shape of Hd
Shape of Hd showing the “good well” for the upright position and the “bad well” for
the hanging position.

Shape of Hd
Cut of Hd showing the non-desired “well” for the hanging position.

Shape of Hd
Cut of Hd showing the shape of the kinetic energy.

Adding damping
• x1
x2
=
0 1
−1 −k cos x1
Dx1
Hd
Dx2Hd
,
•
x1 = x2
x2 = −V ′
d(x1) − kx2 cos x1.
• Target system
x1 = x2
x2 = sinx1 − 2a cos x1 sin x1 − kx2 cos x1,
• Feedback law
u = 2a sin x1 + kx2.
However...
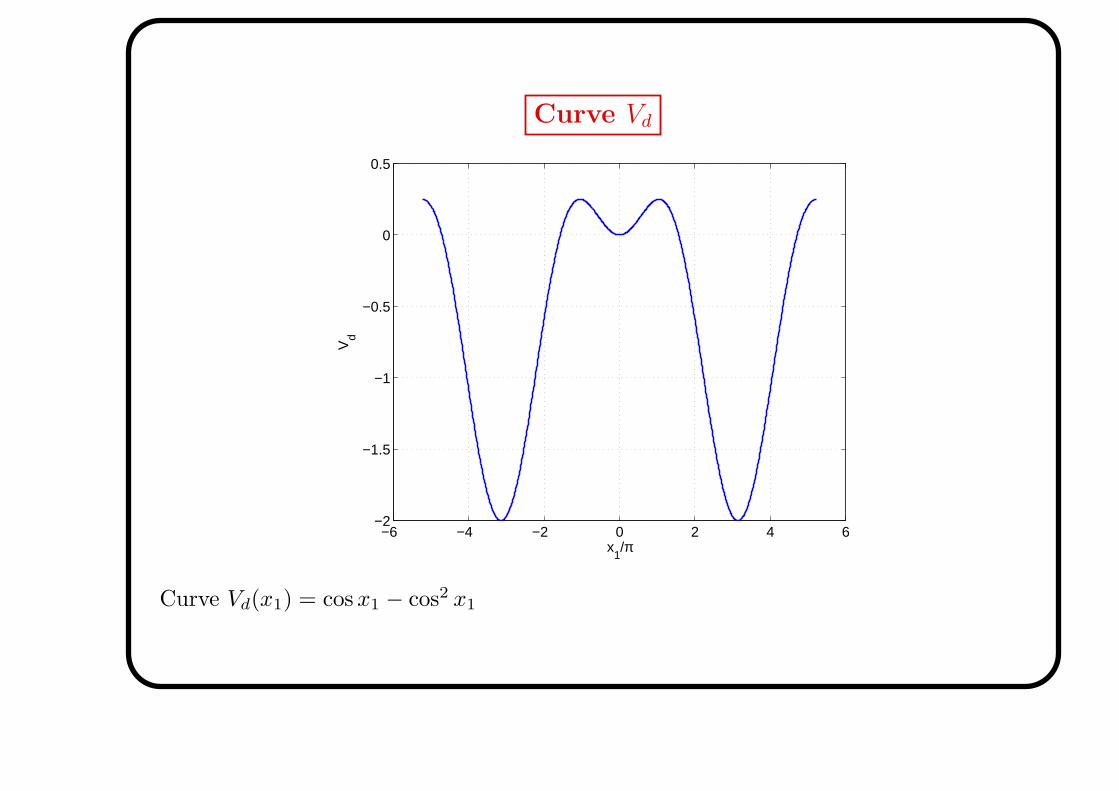
Curve Vd
−6 −4 −2 0 2 4 6−2
−1.5
−1
−0.5
0
0.5
x1/π
Vd
Curve Vd(x1) = cos x1 − cos2 x1

Curve Hd =1
4a
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x1/π
x 2
Curve Hd(x1, x2) = cos x1 − cos2 x1 + 1
2x2
2 = 1
4a
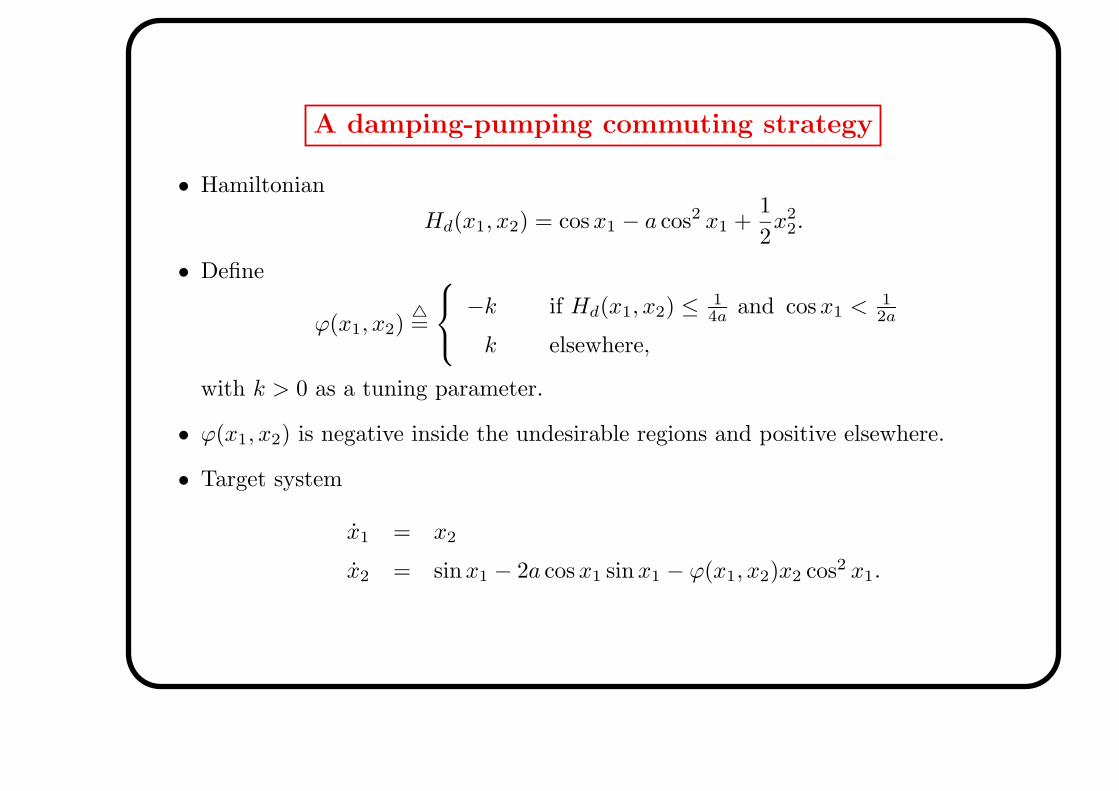
A damping-pumping commuting strategy
• Hamiltonian
Hd(x1, x2) = cos x1 − a cos2 x1 +1
2x2
2.
• Define
ϕ(x1, x2)△=
−k if Hd(x1, x2) ≤1
4aand cos x1 < 1
2a
k elsewhere,
with k > 0 as a tuning parameter.
• ϕ(x1, x2) is negative inside the undesirable regions and positive elsewhere.
• Target system
x1 = x2
x2 = sinx1 − 2a cos x1 sin x1 − ϕ(x1, x2)x2 cos2 x1.
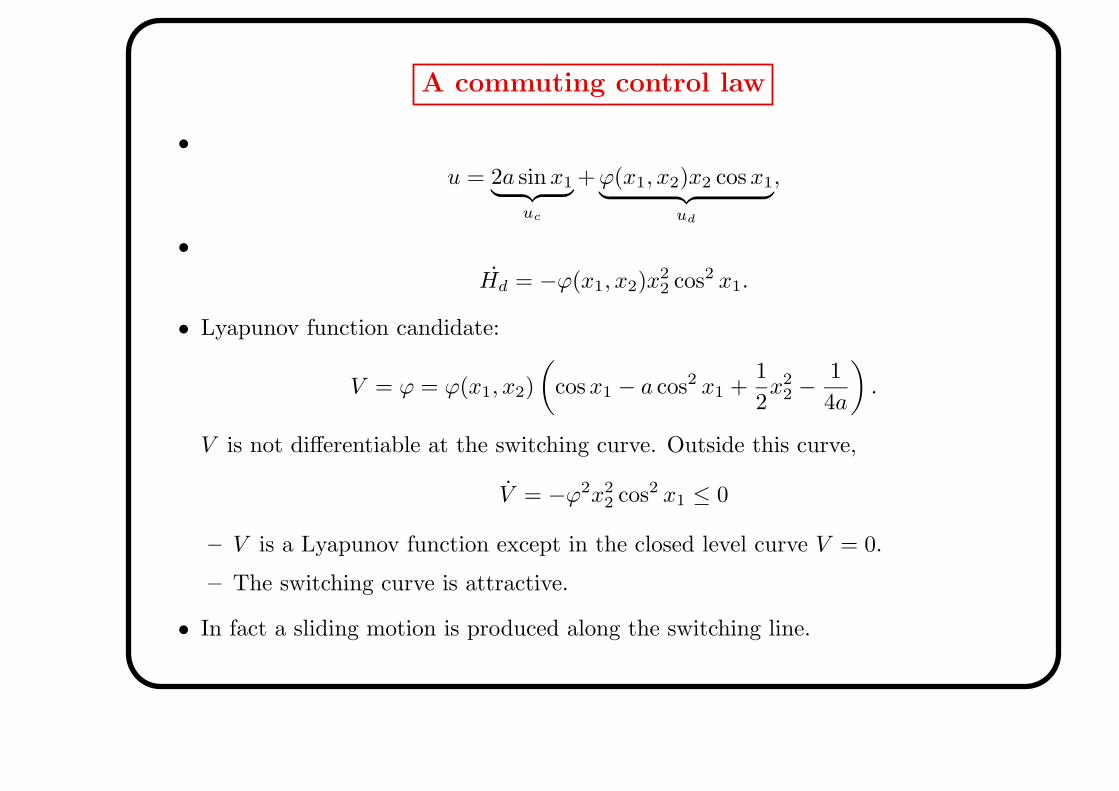
A commuting control law
•
u = 2a sin x1︸ ︷︷ ︸uc
+ ϕ(x1, x2)x2 cos x1︸ ︷︷ ︸ud
,
•
Hd = −ϕ(x1, x2)x22 cos2 x1.
• Lyapunov function candidate:
V = ϕ = ϕ(x1, x2)
(cos x1 − a cos2 x1 +
1
2x2
2 −1
4a
).
V is not differentiable at the switching curve. Outside this curve,
V = −ϕ2x22 cos2 x1 ≤ 0
– V is a Lyapunov function except in the closed level curve V = 0.
– The switching curve is attractive.
• In fact a sliding motion is produced along the switching line.
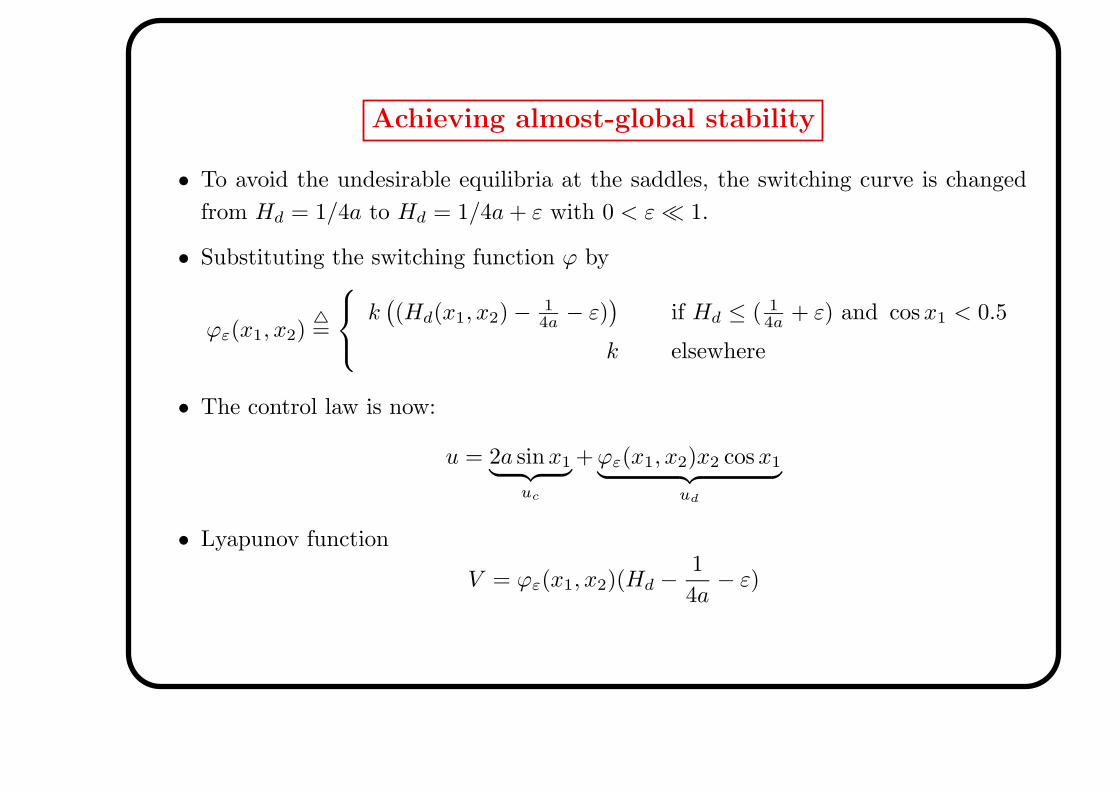
Achieving almost-global stability
• To avoid the undesirable equilibria at the saddles, the switching curve is changed
from Hd = 1/4a to Hd = 1/4a + ε with 0 < ε ≪ 1.
• Substituting the switching function ϕ by
ϕε(x1, x2)△=
k((Hd(x1, x2) −
1
4a− ε)
)if Hd ≤ ( 1
4a+ ε) and cos x1 < 0.5
k elsewhere
• The control law is now:
u = 2a sin x1︸ ︷︷ ︸uc
+ ϕε(x1, x2)x2 cos x1︸ ︷︷ ︸ud
• Lyapunov function
V = ϕε(x1, x2)(Hd −1
4a− ε)
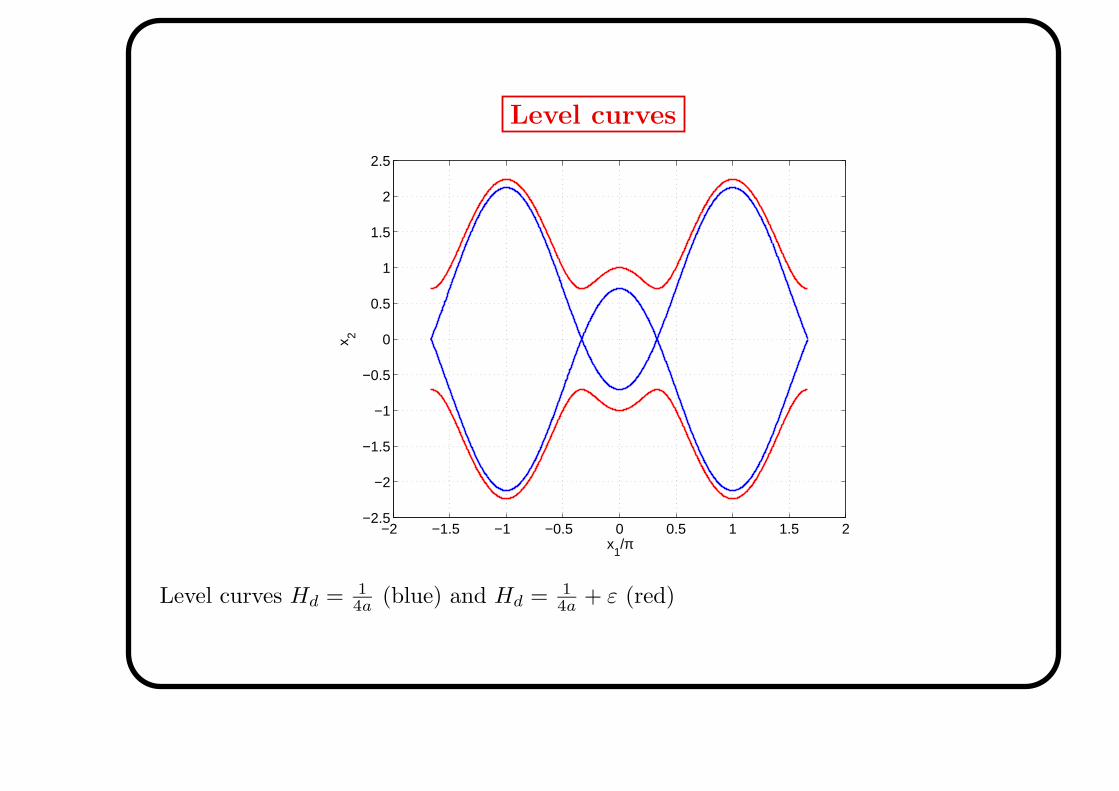
Level curves
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x1/π
x 2
Level curves Hd = 1
4a(blue) and Hd = 1
4a+ ε (red)

Avoiding the sliding mode
• Sliding motions due to the discontinuity along the level curve Hd = 1
4a+ ε.
• Modify the switching function in such a way that it is equal to zero at both sides
of the switching curve.
• Multiplying function ϕε by abs(Hd(x1, x2)−1
4a− ε), ud will be equal to zero at the
level curve Hd = 1
4a+ ε avoiding the sliding motion.
• New switching function:
ϕε(x1, x2)△=
k(Hd(x1, x2) −1
4a− ε) if cos x1 < 0.5
k elsewhere

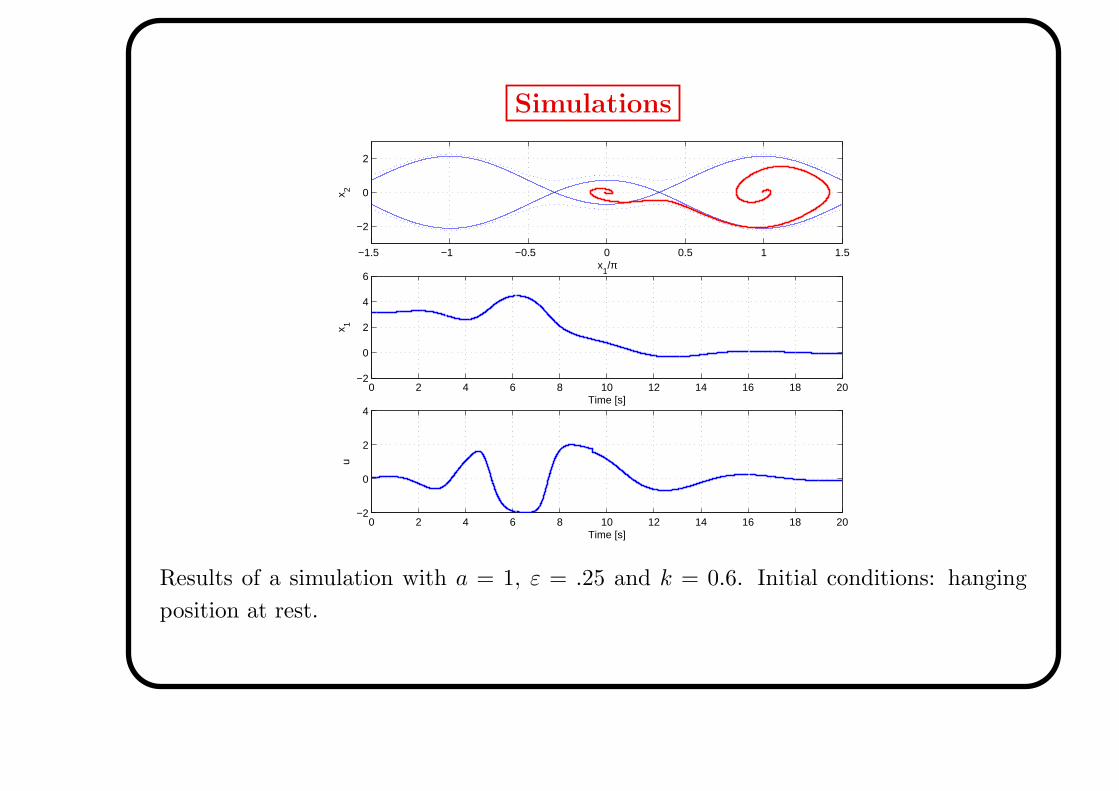
Simulations
−1.5 −1 −0.5 0 0.5 1 1.5
−2
0
2
x1/π
x 2
0 10 20 30 40 50−5
0
5
Time [s]
x 1
0 10 20 30 40 50−5
0
5
Time [s]
u
Results of a simulation with a = 1, ε = .25 and k = 0.2. Initial conditions: hanging
position at rest.
Animation
Simulations
−1.5 −1 −0.5 0 0.5 1 1.5
−2
0
2
x1/π
x 2
0 2 4 6 8 10 12 14 16 18 20−2
0
2
4
6
Time [s]
x 1
0 2 4 6 8 10 12 14 16 18 20−2
0
2
4
Time [s]
u
Results of a simulation with a = 1, ε = .25 and k = 0.6. Initial conditions: hanging
position at rest.

Trajectory leaving the well
−0.5 0 0.5 1 1.5 2
−4−2
02
40
10
20
30
40
50
60
70
80
x1/πx
2
Tim
e [s
]
Trajectory leaving the well and reaching the up-right position, for k = 0.2.
Stopping the cart
• To cope with the cart, we add a new term v to the control
u = 2a sin x1 + ϕεx2 cos x1 + v.
• Without v, once the pendulum has reached the inverted position, then x1 = x2 = 0,
but
x3 =
∫(2a sin x1 + ϕεx2 cos x1)dt 6= 0
.
• So the system becomes
x1 = x2
x2 = sinx1 − 2a sin x1 cos x1 − ϕεx2 cos2 x1 − cos x1v
x3 = 2a sinx1 + ϕεx2 cos x1 + v.
Feedforward control
• Making [x1 x2]T = ξ and x3 = z, the system equations can be written in the
standard feedforward form
z = h(ξ) + g1(ξ)v
ξ = f(ξ) + g2(ξ)v.
• Following Astolfi and Kaliora’s suggestion, we adopt the control law
v = −ε2σ
(λx3
ε2
),
where σ is the saturating function σ(y) = sgn(y) min{|y|, 1}.
• Therefore,
u = 2a sin x1 + ϕεx2 cos x1 − ε2σ
(λx3
ε2
).
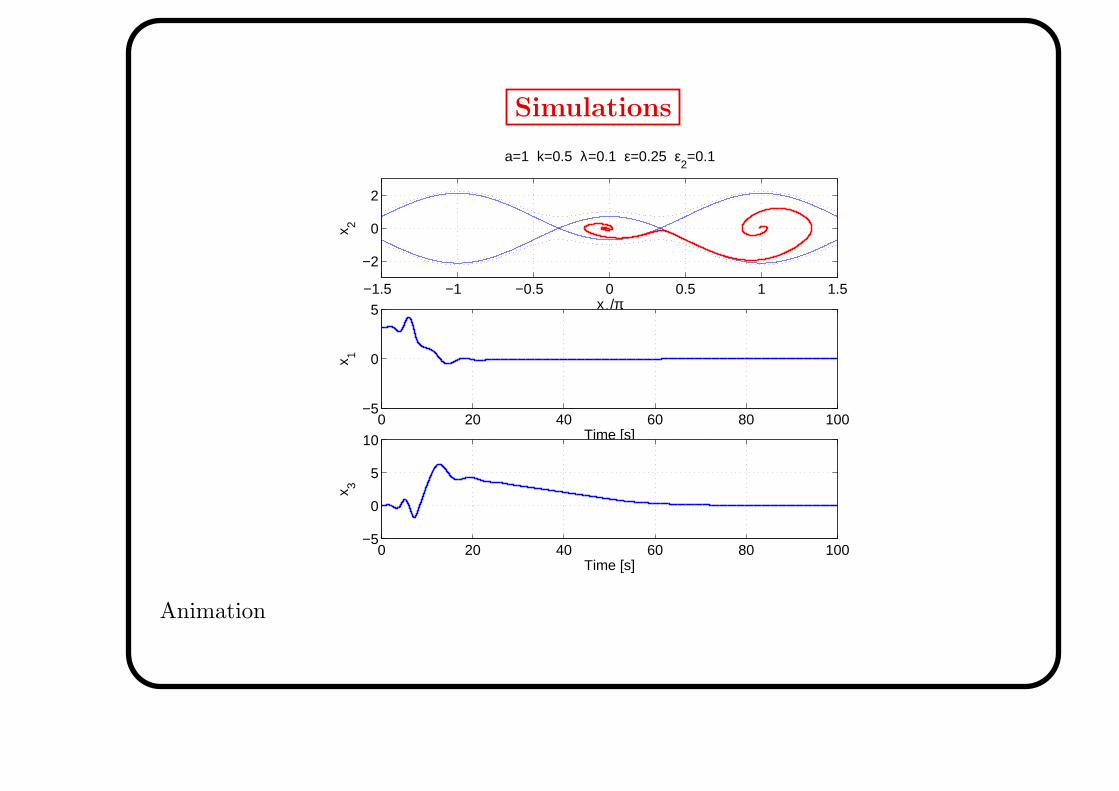
Simulations
−1.5 −1 −0.5 0 0.5 1 1.5
−2
0
2
x1/π
x 2
a=1 k=0.5 λ=0.1 ε=0.25 ε2=0.1
0 20 40 60 80 100−5
0
5
Time [s]
x 1
0 20 40 60 80 100−5
0
5
10
Time [s]
x 3
Animation
Periodic oscillations
• Target system x1
x2
=
0 1
Γ
− 1
Γ−k
Γ ∂Γ
∂x1
Γ ∂Γ
∂x2
,
where Γ = 0 is a curve that represents the limit cycle.
• Γ = x21 +x2
2−µ, where µ is the square of the radius of the limit cycle circumference.
In this case above equations lead to
x1 = x2
x2 = −x1 − kΓx2.
This system is an oscillator with a nonlinear damping.

Lyapunov function for an oscillating system
• The system of the previous slide has as Lyapunov function V = Γ2/4
Feedback law
• Matching open and closed loop we obtain
u =x1 + kΓx2 + sinx1
cos x1
,
which renders the pendulum periodically oscillatory with a limit cycle given by
x21 + x2
2 = µ.
• Due to cos x1 in the denominator, feedback law is restricted to the domain |x1| <
π/2.
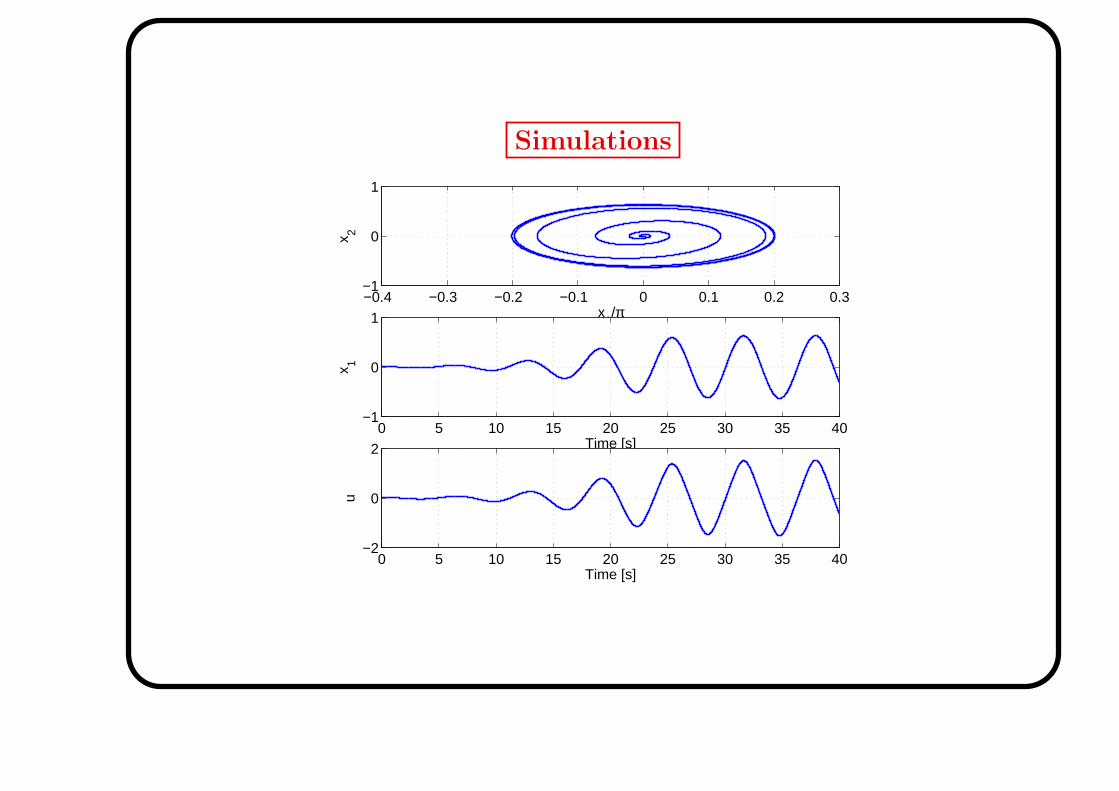
Simulations
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3−1
0
1
x1/π
x 2
0 5 10 15 20 25 30 35 40−1
0
1
Time [s]
x 1
0 5 10 15 20 25 30 35 40−2
0
2
Time [s]
u
Taking the cart into account
• Add a new term v to the control
u =x1 + kΓx2 + sinx1
cos x1
+ v.
• Closed loop system
x1 = x2
x2 = −x1 − kx2Γ − cos x1v
x3 = x1+kΓx2+sin x1
cos x1
+ v.
• Proceeding in a similar way as for the swing up problem we shoyld adopt the control
law
u =x1 + kΓx2 + sinx1
cos x1
− εσ
(λx3
ε
).
Animation