Apuntes de Álgebra Lineal
180
Universidad de Málaga Escuela Técnica Superior de Ingenieros Industriales Álgebra lineal Apuntes Teoría y ejercicios resueltos Nombre Grado en Ingeniería en Tecnologías Industriales Málaga - 17 de septiembre de 2014
-
Upload
darknesscrysis -
Category
Documents
-
view
347 -
download
5
description
Apuntes Álgebra Lineal Universidad de Málaga Grado en Ingeniería en Tecnologías Industriales
Transcript of Apuntes de Álgebra Lineal
Universidad de MálagaEscuela Técnica Superior de Ingenieros Industriales
Álgebra lineal
ApuntesTeoría y ejercicios resueltos
Nombre
Grado en Ingeniería en Tecnologías Industriales
Málaga - 17 de septiembre de 2014

II
Índice general
P. Preliminares 1
1. Espacios vectoriales y aplicaciones lineales 11
2. Diagonalización de endomorfismos 63
3. Espacio afín y euclídeo. Movimientos 119
III

IV ÍNDICE GENERAL
PreliminaresEn este tema veremos los conocimientos básicos para empezar el curso.
P.1. Conjuntos
Definición. Un conjunto es una colección de objetos considerada como un objeto en sí. A los objetoslos llamamos elementos. Los conjuntos se denotan con letras mayúsculas. Los elementos se denotancon letras minúsculas. Un conjunto se representa enumerando los elementos entre llaves. Por ejemplo:{e, i, π, 1} es el conjunto del número entero 1, el número imaginario puro i =
√−1 y los números
trascendentes e = 2,7182818 . . . y π = 3,1415926 . . .. No contamos los elementos repetidos delconjunto. Consideramos el conjunto {1, 2, 2, 3, 3, 3} idéntico al {1, 2, 3}. El orden de los elementoses irrelevante. El conjunto {1, 2, 3} es equivalente al {3, 2, 1}.
Existen dos maneras de describir o especificar los elementos de un conjunto. Una de ellas espor extensión, esto es, listando cada miembro del conjunto. El conjunto de los números enteros esZ = {. . . ,−3,−2,−1, 0, 1, 2, 3, . . . }. La otra es mediante una definición intensiva o por compren-sión, describiendo una condición que cumplen sus elementos. Para hacer esto usamos la notación{x|condiciones de x}. Esto se lee “el conjunto de los elementos x tales que . . . ” (: y | se leen tal que).x ∈ S es la notación para “x pertenece al conjunto S”. Para expresar lo contrario hacemos x 6∈ Spara “x no pertenece al conjunto S.”
Ejemplos. Presentamos la notación que usaremos para denotar algunos de los conjuntos más usua-les.
• ∅ = {} es el conjunto vacío, el conjunto que no contiene elementos.
• Z = {. . . ,−3,−2,−1, 0, 1, 2, 3 . . .} es el conjunto de los números enteros (la letra Z provienede la palabra “número” en alemán que se escribe “Zahlen”).
• Q = {p/q|p, q ∈ Z, q 6= 0} es el conjunto de los números racionales (la Q es de cociente, delinglés quotient.) 1
• R = {x|x = a1a2 · · · an.b1b2 · · · } es el conjunto de los números reales, es decir, el conjunto denúmeros con expansión decimal.
• C = {a + ib|a, b ∈ R, i2 = −1} es el conjunto de los números complejos. i es la raíz cuadradade −1. (Si no has visto números complejos antes no te alteres. Los veremos más adelante.
• Z+, Q+ y R+ son los conjuntos de los números enteros, racionales y reales positivos, respecti-vamente. Por ejemplo, Z+ = {1, 2, 3, . . .}. Usamos el superíndice− para denotar los conjuntosde los números negativos.
1Notese que con esta descripción enumeramo cada racional un número infinito de veces: Por ejemplo: 1/2 = 2/4 =3/6 = (−1)/(−2) = · · · . Esto no supone un problema ya que no contamos las repeticiones.
1

2 TEMA P. PRELIMINARES
• Z∗, Q∗ and R∗ son los conjuntos de los números enteros, racionales y reales salvo el cero,respectivamente. Por ejemplo, N∗ = {1, 2, 3, . . .}.
• (a . . . b) denota un intervalo abierto en la recta real. (a . . . b) ≡ {x|x ∈ R, a < x < b}
• Usamos corchetes para denotar el intervalo cerrado. [a..b] ≡ {x|x ∈ R, a ≤ x ≤ b}El cardinal de un conjunto S se denota por card(S). Para conjuntos finitos, el cardinal es el
número de elementos en el conjunto. El producto cartesiano de dos conjuntos es el conjunto de paresordenados:
X × Y ≡ {(x, y)|x ∈ X, y ∈ Y }.El producto cartesiano de n conjuntos es el conjunto de n-uplas ordenadas:
X1 ×X2 × · · · ×Xn ≡ {(x1, x2, . . . , xn)|x1 ∈ X1, x2 ∈ X2, . . . , xn ∈ Xn}.Una n-upla es una colección de números reales dados en un cierto orden.
Igualdad. Dos conjuntos S y T son iguales si cada elemento de S es elemento de T y viceversa.Esto se denota, S = T . La desigualdad se expresa S 6= T . S es un subconjunto de T si cada elementode S es elemento de T . Se dice que S está incluido en T o que T incluye a S y se escribe S ⊂ T oT ⊃ S, respectivamente. Por ejemplo: El conjunto vacío es un subconjunto de cada conjunto, ∅ ⊆ S.Los números racionales son un subconjunto de los números reales Q ⊂ R.
Operaciones. Sea S ⊂ T . El conjunto de los elementos de S que no pertenecen a T se llamacomplemento o conjunto complementario de A respecto de T y lo llamaremos Sc.La unión de dos conjuntos, S ∪ T , es el conjunto cuyos elementos están en cualquiera de los dosconjuntos La unión de n conjuntos,
∪nj=1Sj ≡ S1 ∪ S2 ∪ · · · ∪ Snes el conjunto cuyos elementos están en cualquiera de los conjuntos Sj . La intersección de dos con-juntos, S ∩ T , es el conjuntos cuyos elementos están en los dos conjuntos. En otras palabras, la inter-sección de dos conjuntos es el conjunto de elementos que ambos tienen en común. La intersección den conjuntos,
∩nj=1Sj ≡ S1 ∩ S2 ∩ · · · ∩ Snes el conjunto cuyos elementos están en todos los conjuntos Sj . Si dos conjuntos no tienen elementosen común , S ∩ T = ∅, entonces los conjuntos son disjuntos. Si T ⊂ S, entonces la diferencia entreS y T , S \ T , es el conjunto de elementos en S que no están en T .
S \ T ≡ {x|x ∈ S, x 6∈ T}La diferencia de conjuntos también se denota S − T .
Propiedades. Las siguientes propiedades se pueden verificar fácilmente de las definiciones anterio-res.
• S ∪ ∅ = S, S ∩ ∅ = ∅, S \ ∅ = S, S \ S = ∅.
• Commutative. S ∪ T = T ∪ S, S ∩ T = T ∩ S.
• Associative. (S∪T )∪U = S∪ (T ∪U) = S∪T ∪U , (S∩T )∩U = S∩ (T ∩U) = S∩T ∩U .
• Distributive. S ∪ (T ∩ U) = (S ∪ T ) ∩ (S ∪ U), S ∩ (T ∪ U) = (S ∩ T ) ∪ (S ∩ U).
P.2. CUANTIFICADORES 3
P.2. CuantificadoresEn lógica, teoría de conjuntos y matemáticas en general, los cuantificadores son símbolos utiliza-
dos para indicar cuántos o qué tipo de elementos de un conjunto dado cumplen con cierta propiedad.Existen muchos tipos de cuantificadores, entre los más utilizados están:
P.2.1. Cuantificador universal∀x, y . . . se lee: para todo x, y . . .
El cuantificador universal se utiliza para afirmar que todos los elementos de un conjunto satisfacenuna determinada proposición p(x). Por ejemplo:
∀x ∈ A, p(x)
Esta afirmación suele usarse como la equivalente de la proposición
{x ∈ A | p(x)} = A
que se lee: el conjunto de los x pertenecientes a A tales que cumplen la proposición p(x) es igual alconjunto A.
P.2.2. Cuantificador existencial∃x, y . . . se lee: existe al menos un x, y . . .
El cuantificador existencial se usa para indicar que hay uno o más elementos en el conjunto A (nonecesariamente único/s) que satisfacen una determinada proposición p(x). Se escribe:
∃x, y ∈ A, p(x)
Esta proposición suele interpretarse como la equivalente de la proposición siguiente:
{x, y ∈ A | p(x)} 6= ∅.
P.2.3. Cuantificador existencial único∃!x, y . . . se lee: existe exactamente un x, y . . .
El cuantificador existencial con marca de unicidad se usa para indicar que hay un único elemento deun conjunto A que cumple una determinada propiedad. Se escribe:
∃!x, y ∈ A p(x).
Se lee “Existe un único elemento de A cumpliendo una proposición p(x)”.
P.3. AplicacionesEl concepto general de función, aplicación o mapeo se refiere a una regla que asigna a cada
elemento de un primer conjunto un único elemento de un segundo conjunto. Para designar las aplica-ciones se suelen utilizar las letras f , g, h, . . . Para indicar que f es una aplicación de A en B se escribe:

4 TEMA P. PRELIMINARES
f : A −→ B o Af−→ B. La manera habitual de denotar una aplicación f es:
f : A→ B
a 7→ b = f(a)
donde A es el dominio de la función f, su primer conjunto o conjunto de partida; B es el codominiode f, su segundo conjunto o conjunto de llegada (que no hay que confundir con la imágen). Por f(a)se denota la regla o algoritmo para obtener la imagen de un cierto objeto arbitrario a del dominio A,es decir, el (único) objeto de B que le corresponde.
Sea f : X → Y . El rango o imagen de f es
f(X) = {y|y = f(x) para algún x ∈ X}.
La imagen es un subconjunto del conjunto de llegada. Para cada Z ⊆ Y , la imagen inversa de Z estádefinida:
f−1(Z) ≡ {x ∈ X|f(x) = z para algún z ∈ Z}.Una función es inyectiva si para cada x1 6= x2, f(x1) 6= f(x2). En otras palabras, a cada elemento
del dominio le corresponde un elemento distinto de la imagen de f . f es sobreyectiva si para cada yen el conjunto de llegada, hay una x tal que y = f(x). Si una función es inyectiva y sobreyectiva,entonces es biyectiva. Puede verse una representación de estos tipos de funciones en la figura P.1.
Injective Surjective Bijective
Figura P.1: Representación de las funciones inyectiva, sobreyectiva y biyectiva
P.4. Estructuras algebraicas
P.4.1. Ley de composición interna u operación internaDefinimos un conjunto A. Definimos un operador ∗ entre elementos del conjunto A. Una ley de
composición interna es una aplicación que opera dos elementos de A con la operación ∗ y el resultadoes un elemento de A:
A× A ∗−→ A
(a, b) 7−→ a ∗ b
Por ejemplo, si tenemos el conjunto A = {0, 1, 2, 3, 4, 5} y ∗ = suma. Entonces no es ley de compo-sición interna ya que, por ejemplo, 5 ∗ 4 = 9 y 9 6∈ A.Sin embargo si tenemos el conjunto B = {0, 1} y ∗ = producto, si es ley de composición interna yaque todas las operaciones entre los elementos de B dan como resultado otro un elemento de B.

P.4. ESTRUCTURAS ALGEBRAICAS 5
P.4.2. Ley de composición externa u operación externaDefinimos dos conjunto A y K (K se llama dominio de escalares). A los elementos de K los
llamaremos escalares (normalmente serán números reales). Se llama ley de composición externa atoda aplicación de un elemento de K operado con un elemento del conjunto A cuyo resultado es otroelemento de A. Si definimos el operador ⊥ podemos escribir la operación externa como:
K × A ⊥−→ A
(k, a) 7−→ k⊥a
Ejemplo 1. Dado el conjunto V3 de vectores en el espacio, el conjunto R de números reales, y laoperación producto de un escalar por un vector tenemos, por ejemplo, que 3⊥(2, 1, 3) = (6, 3, 9) ypor tanto es ley de composición externa.
Ejemplo 2. Dado el conjunto M2(K) de las matrices de orden 2 con coeficientes en K, el conjuntoR de números reales, y la operación producto de un escalar por una matriz de orden 2 tenemos, porejemplo, que
5⊥(
2 03 1
)=
(10 015 5
)y por tanto es ley de composición externa.
P.4.3. GruposUn grupo es una pareja (G, ∗) donde G es un conjunto en el que está definida una operación
interna ∗ que verifica:
1. Asociativa: (a ∗ b) ∗ c = a ∗ (b ∗ c), ∀a, b, c ∈ K
2. Existencia elemento neutro: a ∗ e = e ∗ a = a, ∀a ∈ K
3. Todo elemento posee simétrico: a ∗ a′ = a′ ∗ a = e
Si además es conmutativa, el grupo se denominará abeliano.
P.4.4. Anillos y cuerposUn cuerpo es un conjunto K dotado de dos operaciones internas “+” y “·” denotado por (K,+, ·)
llamadas suma y producto, tal que:
1. (K,+) es un grupo abeliano
2. El producto es asociativo: (a · b) · c = a · (b · c) ∀a, b, c ∈ K
3. El producto es conmutativo: a · b = b · a ∀a, b ∈ K
4. Existe un elemento neutro para la multiplicación denotado por 1: a · 1 = 1 · a = a ∀a ∈ K
5. Todo elemento distinto del neutro para la suma posee inverso (respecto del producto). Si noposee esta propiedad, se dice que es un anillo conmutativo.
6. El producto es distributivo respecto a la suma: a · (b+ c) = a · b+a · c (a+ b) · c = a · c+ b · c

6 TEMA P. PRELIMINARES
P.5. Matrices y sistemas de ecuaciones linealesVeremos ahora un breve resumen de matrices y sistemas de ecuaciones lineales. Se debería dar un
repaso de esta materia al libro de bachillerato. Esta parte esta muy bien explicada en el libro [número]de la bibliografía.Para simplificar, una matriz A se puede designar así:
A = (aij)(i = 1, 2, . . . ,m; j = 1, 2 . . . , n) o bien A = (aij)m,n o, simplemente, (aij)
Llamamos Mm×n(K) al conjunto de las matrices de orden m×n donde los elementos aij (coeficien-tes) pertenecen a un cuerpo K.
Las matrices, de cierta manera, heredan las operaciones del cuerpo K ,así podemos definir lassiguientes operaciones de matrices:
• Suma: A,B ∈Mm×n(K), entonces A+B = (aij + bij).
• Producto de un elemento de K por una matriz: Si a ∈ K y A ∈ Mm×n(K), entonces a · A =(a · aij).
P.5.1. Propiedades1. (Mm×n(K),+) es grupo abeliano.
2. a · (A+B) = a · A+ a ·B
3. (a+ b) · A = a · A+ b · A
4. a · (b · A) = (a · b) · A
5. 1 · A = A
Producto de matrices: Si A ∈Mm×n(K) y B ∈Mn×p(K) entonces
AB =
(n∑k=1
aikbkj
)∈Mm×p(K)
Propiedades:
1. A(BC) = (AB)C
2. AIn = ImA = A
P.5.2. El anillo de las matrices cuadradas(Mn×n(K),+, ·) es un anillo con unidad (la matriz identidad). A los elementos de este anillo que
son inversibles, les llamamos matrices regulares o inversibles, en caso contrario las llamamos matricessingulares.Si A es cuadrada de orden n, se define A0 = In. Para cualquier k ∈ Z+ se tiene que Ak = AAk−1 ysi A es inversible A−k = (A−1)k.

P.5. MATRICES Y SISTEMAS DE ECUACIONES LINEALES 7
Tipos especiales de matrices cuadradas. Dada una matriz cuadrada A = (aij), se tiene:Matriz diagonal: aij = 0 si i 6= j.Matriz escalar: matriz diagonal, de forma que aii = λ para cada i. Es decir A = λ · In.Matriz triangular inferior: aij = 0 si i < j.Matriz triangular superior: aij = 0 si i > j.Matriz simétrica: A = AT .Matriz antisimétrica: A = −AT .Traza: suma de los elementos de la diagonal principal. a11 + a22 + . . .+ ann.
P.5.3. Independencia y dependencia linealLlamamos combinación lineal de filas (o columnas) f1, f2, . . . , fk a una expresión de la forma
a1f1 + a2f2 + . . .+ akfk donde los ai son elementos del cuerpo K.Diremos que un conjunto de filas (o columnas) de una matriz son linealmente independientes si
ninguna de ellas se puede expresar como combinación lineal de las restantes. En caso contrario sedice que el conjunto de filas (o columnas) es linealmente dependiente.
P.5.4. Rango de una matrizLlamamos rango por filas de una matriz al número máximo de filas linealmente independientes.
Asimismo llamamos rango por columnas al número máximo de columnas linealmente independientes.
Teorema 1. El rango por filas de cualquier matriz coincide con su rango por columnas. A dichonúmero le llamamos simplemente rango de la matriz.
Mediante el cálculo de determinantes, podremos calcular de forma fácil el rango de una matriz, defi-niéndolo como el orden de la mayor submatriz cuadrada con determinante no nulo.
P.5.5. Cálculo de determinantesDeterminante de una matriz de orden 2:
A =
(a11 a12a21 a22
)⇒ det
(a11 a12a21 a22
)=
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Determinante de una matriz de orden 3: (Regla de Sarrus)
A =
a11 a12 a13a21 a22 a23a31 a32 a33
⇒ det
a11 a12 a13a21 a22 a23a31 a32 a33
=
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
= a11a22a33 + a12a23a31 + a13a21a32 − (a13a22a31 + a12a21a33 + a11a23a32)
P.5.6. Resolución de sistemas de ecuaciones linealesUn sistema de ecuaciones lineales
a11x1 + · · ·+ a1nxn = b1a21x1 + · · ·+ a2nxn = b2
am1x1 + · · ·+ amnxn = bm

8 TEMA P. PRELIMINARES
se puede escribir en forma de matriz comoa11 a12 . . . a1na21 a22 . . . a2n
...... . . . ...
am1 am2 . . . amn
︸ ︷︷ ︸
A
x1x2...xm
︸ ︷︷ ︸
X
=
b1b2...bm
︸ ︷︷ ︸
B
siendoA la matriz de coeficientes,X el vector de incógnitas yB el vector de términos independientes.Por tanto, el sistema se escribe de forma simplificada AX = B. La matriz ampliada del sistema es
(A|B) =
a11 a12 . . . a1n b1a21 a22 . . . a2n b2
...... . . . ...
...am1 am2 . . . amn bm
Un sistema de ecuaciones diremos que es homogéneo si todos los términos independientes son 0, esdecir es un sistema de la forma:
a11x1 + · · ·+ a1nxn = 0a21x1 + · · ·+ a2nxn = 0
am1x1 + · · ·+ amnxn = 0
Teorema de Rouché-Frobenius Dado un sistemas de ecuaciones AX = B, donde A ∈Mm×n(K)y b ∈ Km, representaremos por (A|B) la matriz ampliada obtenida añadiendo a la matrizA la columnaformada por los elementos de B. Entonces, siendo n el número de incógnitas, se tiene que
• Si rang A 6= rang (A|B), entonces el sistema es incompatible (SI). No tiene solución.
• Si rang A = rang (A|B) y
• rang A = n, el sistema es compatible determinado (SCD). Tiene solución y es única.
• rang A < n, el sistema es compatible indeterminado (SCI). Tiene solución y depende deuno o más parámetros, es decir, tiene infinitas soluciones (porque cada parámetro puedetomar infinitos valores).
Para el caso homogéneo, AX = 0, siempre el vector ~x = ~0 es solución. Por tanto, solo si rang A < nexisten soluciones distintas de la trivial.
P.5.7. Interpretación geométrica1. Si tenemos un sistema de dos ecuaciones con dos incógnitas, podemos tener los siguientes
casos:
a) SCD: Dos rectas que se cortan en un punto
b) SCI: Dos rectas coincidentes

P.5. MATRICES Y SISTEMAS DE ECUACIONES LINEALES 9
c) SI: Dos rectas paralelas
2. Si tenemos un sistema de tres ecuaciones con tres incognitas, podemos tener los siguientescasos:
a) SCD: Los tres planos se cortan en un solo punto
b) SCI
1) Los tres planos se cortan en una recta2) Dos planos son coincidentes y el otro los corta en una recta3) los tres planos son coincidentes
c) SI
1) Los planos se cortan dos a dos2) Dos planos son paralelos y el otro los corta3) Los tres planos son paralelos4) Dos planos son paralelos y el otro coincidente con uno de ellos
P.5.8. Regla de CramerMediante la Regla de Cramer podremos calcular la solución de un sistema lineal de ecuaciones en
términos de determinantes.1. Sistema de 2 ecuaciones con 2 incógnitas. Dado el sistema de ecuaciones:{
ax+ by = ecx+ dy = f
Lo representamos de forma matricial como:
(a bc d
)(xy
)=
(ef
)⇒ x =
∣∣∣∣e bf d
∣∣∣∣∣∣∣∣a bc d
∣∣∣∣ y =
∣∣∣∣a ec f
∣∣∣∣∣∣∣∣a bc d
∣∣∣∣2. Sistema de 3 ecuaciones con 3 incógnitas.
ax+ by + cz = jdx+ ey + fz = kgx+ hy + iz = l
Trabajando en forma matricial, tenemos:
a b cd e fg h i
xyz
=
jkl
⇒ x =
∣∣∣∣∣∣j b ck e fl h i
∣∣∣∣∣∣∣∣∣∣∣∣a b cd e fg h i
∣∣∣∣∣∣, y =
∣∣∣∣∣∣a j cd k fg l i
∣∣∣∣∣∣∣∣∣∣∣∣a b cd e fg h i
∣∣∣∣∣∣, z =
∣∣∣∣∣∣a b jd e kg h l
∣∣∣∣∣∣∣∣∣∣∣∣a b cd e fg h i
∣∣∣∣∣∣
10 TEMA P. PRELIMINARES

Tema 1
Espacios vectoriales y aplicaciones lineales
1.1. Espacios vectoriales
Definición 1. Llamamos espacio vectorial sobre un cuerpo K a un conjunto V con dos operaciones:una suma (+)V ×V → V (interna) y un producto (·)K×V → V (externa) que verifican las siguientespropiedades:
1. (V,+) tiene estructura de grupo abeliano.
2. La operación externa (·) verifica:
a) Distributiva respecto a la suma de vectores: λ(~v+ ~w) = λ~v+ λ~w para λ ∈ K y ~v, ~w ∈ V .
b) Distributiva respecto a la suma de escalares: (λ+ µ)~v = λ~v + µ~v para λ, µ ∈ K y ~v ∈ V .
c) Asociativa respecto a los escalares: (λµ)~v = λ(µ~v) para λ, µ ∈ K y ~v ∈ V .
d) 1 · ~v = ~v para ~v ∈ K (siendo 1 la unidad).
Representaremos por (V,+, ·,K) al espacio vectorial. Los elementos del cuerpo se denominan escala-res y se suelen representar por letras griegas como α, β, λ, µ, . . .. Los elementos del espacio vectorialse denominan vectores y se representan por ~u,~v, ~w, . . .
Ejemplos de espacios vectoriales:
• Dado un cuerpoK y un número natural n, el conjunto formado por las matrices de tamaño n×1(matrices columna de tamaño n) es un espacio vectorial. Este espacio vectorial es el principalejemplo de espacio vectorial y se denota Kn.
• (Rn,+, ·,R) es el espacio vectorial real n-dimensional.
• (Kn,+, ·,K) es el espacio vectorial n-dimensional sobre K.
• Si P es el conjunto de polinomios con coeficientes reales, entonces (P,+, ·,R) es un espaciovectorial.
• Las matrices m × n definidas sobre cualquier cuerpo K también forman un espacio vectorial(sobre el mismo cuerpo K).
Teorema 2. En todo espacio vectorial se tienen las siguientes propiedades:
• 0 · ~v = ~0
• λ ·~0 = ~0
• Si λ~v = ~0, entonces λ = ~0 y/o ~v = ~0
• (−1)~v = −~v
• (−λ)~v = λ(−~v) = −(λ~v)
11

12 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Combinación lineal. Será todo vector de la forma
λ1~v1 + λ2~v2 + · · ·+ λn~vn
donde λi ∈ K y ~vi ∈ V .
Nota
• Todo vector es combinación lineal de sí mismo.
• El vector ~0 es combinación lineal de cualquier conjunto de vectores.
Dependencia e independencia lineal
Si S = {~v1, ~v2, . . . , ~vn} es un conjunto finito de vectores (sistema de vectores) de V , diremos queson linealmente dependientes si existe una combinación lineal de ellos
λ1~v1 + λ2~v2 + · · ·+ λn~vn = 0
con al menos un λi 6= 0.En caso de que toda combinación lineal igualada a ~0 implique λ1 = λ2 = · · · = λn = 0, decimos quelos vectores son linealmente independientes.
Ejemplos
• En el espacio vectorial de las funciones reales F (R,R) los conjuntos de vectores {1, x, x2} y{senx, cosx} son linealmente independientes. Para verlo tenemos que demostrar que no existeninguna combinación lineal de ellos. Para el conjunto {1, x, x2} está claro que λ1 · 1 + λ2x +λ3x
2 = 0 implica que λ1 = λ2 = λ3 = 0. Para el conjunto {senx, cosx} podemos hacer
x = π2
y entonces tenemos que λ1 sen π2
+ λ2����* 0
cos π2
= 0 ⇒ λ1 = 0 ⇒ λ2 = 0. En cambio{1, sen2 x, cos2 x} es linealmente dependiente ya que, por ejemplo, 1 + sen2 x− cos2 x = 1 +sen2 x− (1 + sen2 x) = 0.
• En los espacios vectoriales Kn, si tenemos un sistema de vectores S = {~v1, ~v2, . . . , ~vm} po-demos construir la matriz A formada por dichos vectores puestos en columna. Entonces elmáximo número de vectores independientes de S coincide con el rango de la matriz A. Vea-mos, por ejemplo, si en R4 el conjunto de vectores {(1, 2, 4, 3), (−2,−1, 1, 0), (3, 3, 3, 3)} eslinealmente independiente. Para ello calculamos el rango de la matriz
A =
1 −2 32 −1 34 1 33 0 3
Podemos ver que la tercera columna es igual a la primera menos la segunda, C3 = C1 − C2,y entonces sabemos que el conjunto de vectores es linealmente dependiente. Si no lo vemosempezamos por escoger a ojo un menor de orden dos no nulo. Procuramos que sea lo más sen-cillo posible, pues va a formar parte de muchos determinantes de orden superior que habremos

1.1. ESPACIOS VECTORIALES 13
de calcular más adelante. El hecho de que(
1 −22 −1
)nos asegura que las dos primeras filas de
A son linealmente independientes. Veamos si la tercera fila depende linealmente de ellas. Paraello, añadimos los dos nuevos elementos, 4 y 1, y calculamos el menor de orden 3 en el queintervienen esas dos columnas:∣∣∣∣∣∣
1 −2 32 −1 34 1 3
∣∣∣∣∣∣ = −3− 24 + 6 + 12 + 12− 3 = 0
Al ser cero, se deduce que la tercera fila es combinación lineal de las dos primeras. Ahoraprobamos con la cuarta fila haciendo lo mismo que con la primera:∣∣∣∣∣∣
1 −2 32 −1 33 0 3
∣∣∣∣∣∣ = −3− 18 + 9 + 12 = 0
Por tanto, la cuarta fila es, también, combinación lineal de las dos primeras. Entonces rang(A) =
= 2 y, por tanto, el conjunto de vectores es linealmente dependiente.
Teorema 3. Sea V un e.v., entonces:
• Si ~v 6= ~0, entonces {~v} es linealmente independiente.
• Todo sistema de vectores que contenga el ~0 es linealmente dependiente.
• Si S es un sistema de vectores linealmente independientes y S ′ ⊆ S, entonces S ′ es linealmenteindependiente.
• Si S es un sistema de vectores linealmente dependientes y S ⊆ S ′, entonces S ′ es linealmentedependiente.
• Si S es un sistema de vectores, no todos nulos, linealmente dependientes, entonces al menosuno de los vectores se puede expresar como combinación de los restantes.
• Si S es un sistema de vectores linealmente independientes y S∪{~v} es linealmente dependiente,entonces ~v es combinación lineal de los vectores de S.
1.1.1. Subespacios vectoriales.Dado un espacio vectorial V y W ⊆ V , W 6= ∅, un subconjunto de elementos de V , diremos que
es subespacio vectorial (subespacio vectorial) si verifica:a) para cada ~v, ~w ∈ W se tiene ~v + ~w ∈ W .b) para cada ~v ∈ W y λ ∈ K se tiene λ~v ∈ W .O equivalentemente,
λ~v + µ~w ∈ W para cada λ, µ ∈ K y ~v, ~w ∈ W.Obsérvese que {~0} es un subespacio vectorial (subespacio trivial) que pertenece a todo espacio vecto-rial distinto de cero, así como un espacio vectorial siempre es subespacio de sí mismo. Un subespaciovectorial W ⊂ V diremos que es subespacio propio si W 6= {~0} y W 6= V . ~0 pertenece a todosubespacio vectorial.

14 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Ejemplos de subespacios vectoriales
• Si V = R2, W = {(x, y)|y = mx}, siendo m un número real, es un subespacio vectorial.
• Si V = R3, W = {(x, y, z)|ax+ by + cz = 0}, siendo a, b, c números reales, es un subespaciovectorial.
• Si V = R2, W = {(x, y)|x+ y = 1} no es un subespacio vectorial, ya que ~0 = (0, 0) /∈ W .
• Si V = P es el espacio vectorial de los polinomios con coeficientes reales, entones W = Pn
el conjunto de polinomios de grado menor o igual que n es un subespacio vectorial.
Ejemplo 3. Sea P = {(x, y, z) ∈ R3|x = 2y + z} un subconjunto del espacio vectorial R3.Comprobar si P es un subespacio vectorial de R3.
Si nos pidiesen demostrar que P es un espacio vectorial bastaría con probar que es subespacio vecto-rial de R3, ya que todo subespacio vectorial de un espacio vectorial es otro espacio vectorial.Por tanto, probamos que λ~v + µ~w ∈ P ∀λ, µ ∈ R. Sean (2x+ y, x, y), (2z + t, z, t) dos elementosde P . Entonces,
λ(2x+ y, x, y) + µ(2z + t, z, t) = (2λx+ λy + 2µz + µt, λx+ µz, λy + µt) =
= (2(λx+ µz) + λy + µt, λx+ µz, λy + µt)
es un elemento de P , y por tanto, P es subespacio vectorial de R3.
Ejemplo 4. Comprobar si S = {(x, 2x,−x)|x ∈ R} es un subespacio vectorial de R3.
Comprobamos que λ~v + µ~w ∈ S ∀λ, µ ∈ R. Sean (x, 2x,−x), (y, 2y,−y) dos elementos de S.Entonces,
λ(x, 2x,−x) + µ(y, 2y,−y) = (λx+ µy, 2λx+ 2µy,−λx− µy) =
=(λx+ µy, 2(λx+ µy),−(λx+ µy)
)es un elemento de S, y por tanto, S es subespacio vectorial de R3.
Ejemplo 5. Comprobar siQ = {(x, y) ∈ R2|x− y = 1} es un subespacio vectorial de R2.
Comprobamos que λ~v + µ~w ∈ Q ∀λ, µ ∈ R. Sean (x, y), (z, t) dos elementos de Q. Entonces,
λ(x, x− 1) + µ(z, z − 1) = (λx, λx− λ) + (µz, µz − 1) = (λx+ µz, λx+ µz − λ− µ)
no es un elemento de Q, ya que λx + µz − (λx + µz − λ − µ) = λ + µ 6= 1, y por tanto, Q no essubespacio vectorial de R2.
Ejemplo 6. Comprobar siR = {(x, y, z)|x = 0, y = 2α− β, z = α+ β} es un subespaciovectorial de R3.
Comprobamos que λ~v + µ~w ∈ R ∀λ, µ ∈ R. Sean (0, 2α − β, α + β), (0, 2γ − t, γ + t) doselementos de R. Entonces,
λ(0, 2α− β, α + β) + µ(0, 2γ − t, γ + t) = (0, 2λα− λβ + 2µγ − µt, λα + λβ + µγ + µt) =
=(0, 2(λα + µγ)− (λβ + µt), (λα + µγ) + (λβ + µt)
)es un elemento de R, y por tanto, R es subespacio vectorial de R3.

1.1. ESPACIOS VECTORIALES 15
Teorema 4. Dado un sistema de vectores S ⊆ V , S 6= ∅, el conjunto L(S) formado por todas lasposibles combinaciones lineales de los vectores de S forman un subespacio vectorial de V .
Definición 2. A este subespacio vectorial L(S) se le llamará subespacio generado por el conjunto devectores S. Si {~v1, ~v2, . . . , ~vn} es dicho conjunto se representa por L(S) = 〈~v1, ~v2, . . . , ~vn〉.
Definición 3. SiW es un subespacio vectorial de V , y S es un sistema de vectores tal que L(S) = Wdecimos entonces que S es un sistema generador de W .
Ejemplo 7. Si V = R4 y W = 〈(1, 2, 0, 0), (0, 3,−1, 0)〉, entonces los vectores de W son de laforma:
(x, y, z, t) = λ(1, 2, 0, 0) + µ(0, 3,−1, 0)
donde λ y µ son números reales cualesquiera.
Ejemplo 8. En el espacio vectorial P de los polinomios con coeficientes reales, S = {1 − x, 1 +x2, 2x+ x2} es un sistema generador del subespacio vectorial P2 de los polinomios de grado menoro igual que 2.Para ver esto comprobamos que cualquier polinomio de la forma a+ bx+ cx2 es combinación linealde los vectores de S, puesto que
a+ bx+ cx2 = λ(1− x) + µ(1 + x2) + λ(2x+ x2)
nos plantea el sistema compatible de ecuaciones 1 1 0−1 0 20 1 1
λµγ
=
abc
Además, es evidente que cualquier polinomio de grado mayor que 2 no puede ser expresado comocombinación lineal de los vectores de S.
1.1.2. Bases y dimensiónDefinición 4. Llamamos base de un espacio vectorial V a un sistema de vectores B linealmenteindependiente que es un sistema generador de V , es decir L(B) = V .
Ejemplos:
1. En los espacios vectoriales Kn, el sistema de n vectores
{(1, 0, 0, . . . , 0), (0, 1, 0, . . . , 0), . . . , (0, 0, . . . , 0, 1)}
es una base, a la que llamamos base canónica.
2. En el espacios vectoriales Pn los polinomos {1, x, x2, . . . , xn} forman una base.
3. Los espacios vectoriales de los polinomios P admiten una base infinita numerable {1, x, x2,. . . , xn, xn+1, . . .}.

16 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
4. En el subespacio de R4 siguiente
W = 〈(1, 2, 4, 3), (−2,−1, 1, 0), (3, 3, 3, 3)〉
veamos por cuantos vectores estaría formada una base de W . Para ello calculamos el rango dela matriz cuyas columnas son las coordenadas de los vectores de W .
1 −2 32 −1 34 1 33 0 3
∣∣∣∣∣∣1 −2 32 −1 34 1 3
∣∣∣∣∣∣ = −3− 24 + 6 + 12 + 12− 3 = 0
∣∣∣∣∣∣1 −2 32 −1 33 0 3
∣∣∣∣∣∣ = −3− 18 + 9 + 12 = 0
los tres vectores son linealmente dependientes sin embargo el primero y el segundo son lineal-
mente independientes ya que∣∣∣∣1 −22 −1
∣∣∣∣ = −1+4 = 3 6= 0, el primero y el tercero también porque∣∣∣∣1 32 3
∣∣∣∣ = 3−6 = −3 6= 0, así como el segundo y el tercero ya que∣∣∣∣−2 3−1 3
∣∣∣∣ = −6+3 = −3 6= 0
Por tanto, una base de W estaría formada por cualesquiera dos vectores del sistema generador.
Nota: Nos interesan especialmente los espacios vectoriales con bases finitas.
1.1.3. Espacio vectorial de dimensión finitaTeorema 5. Si un espacio vectoriale admite una base finita con n vectores entonces todas las basestienen exactamente n vectores.
Definición 5. Si un espacio vectoriale tiene una base finita de n vectores decimos que es de dimensiónfinita. Al número natural n lo llamamos dimensión del espacio. Denotándose por dimK(V ), o pordim(V ), si no hay duda de cual es el cuerpo K. Aceptamos que el espacio vectorial trivial {~0} es elúnico espacio de dimensión 0.
Teorema 6. Si B = {~v1, ~v2, . . . , ~vn} es una base de un espacio vectorial, cada vector ~v del espaciose puede expresar de forma única como combinación lineal de los vectores de B
~v = λ1~v1 + λ2~v2 + · · ·+ λn~vn
y se dice que (λ1, λ2, . . . , λn) son las coordenadas de ~v respecto de la base B, lo que podemossimplificar escribiendo (λ1, λ2, . . . , λn)B.
Ejemplo 9. Fija dos bases distintas para el espacio vectorial generado por el sistema de vectores
{(1, 2, 4, 3), (−2−, 1, 1, 0), (3, 3, 3, 3)}
y determina, de entre los siguientes vectores, los que pertenecen a dicho espacio y qué coorde-nadas tienen respecto de cada una de las bases.
a) (2, 1, 4, 3) b) (1, 2, 4, 3)c) (5, 4, 2, 3) d) (3, 2−, 1, 3)

1.1. ESPACIOS VECTORIALES 17
1.1.4. Cambio de baseSi B = {~v1, ~v2, . . . , ~vn} y B′ = {~v′1, ~v′2, . . . , ~v′n} son bases de un mismo espacio vectorial V .
Llamaremos ecuaciones de cambio de base a:~v′1~v′2...~v′n
=
p11 p12 · · · p1np21 p22 · · · p2n...
... . . . ...pn1 pn2 · · · pnn
~v1~v2...~vn
siendo
PBB′ =
p11 p12 · · · p1np21 p22 · · · p2n...
... . . . ...pn1 pn2 · · · pnn
la matriz del cambio de base de B a B′, esto es: la matriz regular cuyas columnas son las coordenadasde los vectores de B respecto de B′.Dado un vector ~v respecto de las dos bases, tenemos:
~v = λ1~v1 + λ2~v2 + · · ·+ λn~vn
~v = λ′1~v′1 + λ′2~v
′2 + · · ·+ λ′n~v
′n
Siendo (λ1, λ2, . . . , λn) sus coordenadas en la base B y (λ′1, λ′2, . . . , λ
′n) sus coordenadas en la base
B′. Quedando relacionadas dichas coordenadas por:λ′1λ′2...λ′n
=
p11 p12 · · · p1np21 p22 · · · p2n...
... . . . ...pn1 pn2 · · · pnn
−1
λ1λ2...λn
Si denotamos por ξB(~v) a las coordenadas del vector ~v en la base B, ξB(~v) =
λ1λ2...λn
, tenemos:
ξ′B(~v) = P−1BB′ξB(~v) = PB′BξB(~v)
Ejemplo 10. Consideremos el espacio vectorial R3 y las basesB = {(1,−1, 1), (0, 1, 1, ),(0, 0,−1)} y C, la base canónica, y el vector ~v = (−1, 2, 3). Obtener la matriz de cambio debase de C a B. Emplear esta matriz para calcular las coordenadas de ~v respecto de la base B.Calcular la matriz de cambio de base deB a C.
Calculamos las coordenadas del primer vector de C respecto de la base B:
(1, 0, 0) = α(1,−1, 1) + β(0, 1, 1) + γ(0, 0,−1) = (α,−α + β, α + β − γ)⇒
⇒
α = 1−α + β = 0α + β − γ = 0
⇒
α = 1β = 1γ = 2

18 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Entonces las coordenadas respecto de B son (1, 1, 2) y las escribimos en la primera columna de lamatriz: 1
12
Ahora hacemos lo mismo para el segundo vector de C.
(0, 1, 0) = α(1,−1, 1) + β(0, 1, 1) + γ(0, 0,−1) = (α,−α + β, α + β − γ)⇒
⇒
α = 0−α + β = 1α + β − γ = 0
⇒
α = 0β = 1γ = 1
Observemos que mucho de los que hemos hecho antes nos a servido para este segundo paso. Por tanto,podemos pensar que esto se puede hacer de una forma más automática como veremos más adelante.Escribimos de nuevo nuestra matriz: 1 0
1 12 1
Y por último calculamos las coordenadas del tercer vector de C en la base B:
(0, 0, 1) = α(1,−1, 1) + β(0, 1, 1) + γ(0, 0,−1) = (α,−α + β, α + β − γ)⇒
⇒
α = 0−α + β = 0α + β − γ = 1
⇒
α = 0β = 0γ = −1
Y ya tenemos nuestra matriz de cambio de base de C a B:
PCB =
1 0 01 1 02 1 −1
Utilizamos esta matriz para calcular las coordenadas de ~v en la base B:
PCBξC(~v) =
1 0 01 1 02 1 −1
−123
=
−1−1 + 2−2 + 2− 3
=
−11−3
Ahora calculamos la matriz de cambio de base de B a C. Como las coordenadas de los vectores de Brespecto de la base canónica coinciden con sus componentes, la matriz es:
PBC =
1 0 0−1 1 01 1 −1
Las matrices de cambio de base al multiplicarlas entre si siempre dan la matriz identidad. Lo compro-bamos para este caso:1 0 0
1 1 02 1 −1
1 0 0−1 1 01 1 −1
=
1 0 01− 1 1 0
2− 1− 1 1− 1 1
=
1 0 00 1 00 0 1

1.1. ESPACIOS VECTORIALES 19
Esto nos da otra forma más sencilla de calcular la matriz de cambio de base de una base canónica aotra base. Para ello calculamos la matriz de cambio de base de esa otra base a la canónica, que comohemos visto es la matriz cuyas columnas son los vectores de esa otra base, y calculamos su inversa.Lo comprobamos para este caso, para ello calculamos la inversa de PBC :∣∣∣∣∣∣
1 0 0−1 1 01 1 −1
∣∣∣∣∣∣ = −1 6= 0; Adj(PBC) =
−1 −1 −20 −1 −10 0 1
; Adj(PBC)t =
−1 0 0−1 −1 0−2 −1 1
P−1BC =
Adj(PBC)t
|PBC |= −1
−1 0 0−1 −1 0−2 −1 1
=
1 0 01 1 02 1 −1
Que como vemos es la misma matriz que habíamos obtenido anteriormente.
Para mostrar como funciona todo esto de las matrices de cambio de base vamos a comprobar queefectivamente a partir de las coordenadas de ~v respecto a la base B y utilizando la matriz de cambiode base de la base B a la C llegamos a las mismas coordenadas respecto a la base C:
PBCξB(~v) =
1 0 0−1 1 01 1 −1
−11−3
=
−11 + 1
−1 + 1 + 3
=
−123
1.1.5. Ecuaciones cartesianas y paramétricas
En los espacios vectoriales Kn podemos representar los subespacios mediante:
Ecuaciones cartesianas (o implícitas): Dan restricciones a las coordenadas de los vectores delespacio para que pertenezcan al subespacio.Un espacio vectorial diremos que está en forma implícita si nos lo dan como el conjunto de solucionesde un sistema de ecuaciones homogéneo.
Ecuaciones paramétricas: Expresan las coordenadas de los vectores del subespacio en función deparámetros que pueden tomar cualquier valor de los escalares en el cuerpo.
Paso de cartesianas a paramétricas y viceversa. Depende del tipo de operaciones que queramoshacer con el subespacio, a veces es conveniente tenerlo en una forma y a veces de otra, por lo quetenemos que aprender a pasar de forma implícita a paramétrica y viceversa.El proceso es muy sencillo y lo veremos con unos ejemplos.
Ejemplo 11. Un subespacio de R4 está definido por las siguientes ecuaciones cartesianas:{x+ y + 2t = zz − y = t
Buscar una base del subespacio.
Despejamos dos de las ecuaciones en función de las demás:{x = z − 2t− yy = z − t

20 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Tomando z y t como parámetros, z = α y t = β, podemos escribir:
y = α− β;x = α− 2β − α + β = −β
Por lo que las ecuaciones paramétricas son:x = −βy = α− βz = αt = β
Por tanto, nuestro subespacio es W = {(−β, α− β, α, β)|α, β ∈ R} de donde
W = 〈(0, 1, 1, 0), (−1,−1, 0, 1)〉
ya que, sacando factor común α y β tenemos que
(−β, α− β, α, β) = (0, α, α, 0) + (−β,−β, 0, β) = α(0, 1, 1, 0) + β(−1,−1, 0, 1)
También podriamos haberlo hecho por el método matricial. Resolviendo el sistema de ecuaciones
(1 1 −1 20 −1 1 −1
)xyzt
=
0000
Ejemplo 12. Supongamos ahora el proceso inverso. Nos dan unos vectores (−1,−1, 0, 1),(0, 1, 1, 0) y nos dicen que calculemos las ecuaciones cartesianas del espacio generado por ellos.
Dicho de otra forma, tenemos que calcular todos los valores x, y, z tales que existe valores α, β, γ, λ ∈R con
−α− β + λ = x β + γ = y
Si tratamos de resolver el sistema considerando x, y, z como términos independientes tenemos:−1 0 x−1 1 y0 1 z1 0 t
F2−F1−→F4+F1
−1 0 x0 1 y − x0 1 z0 0 t+ x
F3−F2−→
−1 0 x0 1 y − x0 0 z + x− y0 0 t+ x
Para que el sistema sea compatible y por lo tanto tenga solución, la relación que se tiene que cumplirentre x, y y z es precisamente: {
z + x− y = 0t+ x = 0
También podriamos haberlo resuelto por sustitución, sin utilizar matrices, como veremos en otrosejemplos.

1.1. ESPACIOS VECTORIALES 21
Ejemplo 13. SeaA = {(x, y, z) ∈ R3|x+ 2y + z = 0,−x+ y − z = 0} un subespacio vec-torial, calcule una base.
Nos dan las ecuaciones cartesianas. Para poder hallar las ecuaciones paramétricas y a partir de ahílos vectores que forman la base lo primero que tenemos que calcular es el número de parámetros quenecesitamos. Y el número de parámetros siempre es:
número de parámetros (dimensión) = dim(V )(número de incógnitas)− número de ecuaciones
Entonces necesitamos 3−2 = 1 parámetro, que llamaremos, por ejemplo, λ. Ahora ponemos nuestrasecuaciones en un sistema {
x+ 2y + z = 0−x+ y − z = 0
Y lo que vamos a hacer es decir que una de esas tres incógnitas x, y, z es igual a λ, normalmente seutiliza z. Es como resolver un sistema compatible indeterminado. Ahora despejamos λ:{
x+ 2y = −λ−x+ y = λ
⇒ 3y = 0⇒ y = 0
Como ya sabemos y y z lo podemos sustituir en cualquiera de nuestras ecuaciones para obtener x.Sustituyendo en la primera por ejemplo:
x+ 2 · 0 + λ = 0⇒ x = −λ
Y ya tenemos nuestras ecuaciones paramétricas:x = −λy = 0z = λ
Solo tenemos un parámetro, por lo que esta base estará formada por un solo vector:
(x, y, z) = λ(−1, 0, 1)
Por tanto, la base de A es B = {(−1, 0, 1)}.
Ejemplo 14. Sea el subespacio A ∈ R3 generado por ~u(1, 0, 1) y ~v(1, 1, 1). Determinar unabase, unas ecuaciones paramétricas y unas cartesianas.
Escribimos la matriz A cuyas columnas son las coordenadas de los vectores:
A =
1 10 11 1
Podemos ver a ojo que el rango de la matriz es rang(A) = 2 por lo que los vectores son linealmenteindependientes. El subespacio vectorial A será aquel formado por los vectores (x, y, z) que surjancomo combinación lineal de ~u y ~v:
(x, y, z) = α(1, 0, 1) + β(1, 1, 1)

22 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
De aquí sacaremos las ecuaciones paramétricas:x = α + βy = βz = α + β
Ahora buscamos las ecuaciones cartesianas:
β = y ⇒
x = α + yy = βz = α + y ⇒ α = z − y
⇒ x = z − y + y = z ⇒⇒ x− z = 0
Ejemplo 15. Aprovechando el resultado del ejemplo anterior, tenemos el subespacioA = {(x,y, z) ∈ R3|x− z = 0}. Se pide calcular los vectores que pueden formar una base de ese subes-pacio.
Lo que hay que hacer en este caso es siempre ver cuantos parámetros necesitamos. En este casonecesitamos 3− 1 = 2 parámetros, que serán, por ejemplo, α y β. Tenemos que tratar de poner nues-tra ecuación cartesiana como ecuaciones que dependan de α y β. Entonces empezamos diciendo quey, como no está en las ecuaciones cartesianas, es α. Y z = β. Como necesitamos dos parámetros, ados de las incógnitas les tendremos que asignar un parámetro. Si solo necesitaramos un parámetro,asignaríamos el parámetro a la z para poder despejar x. Entonces las ecuaciones paramétricas son:
x− z = 0y = αz = β
⇒
x = βy = αz = β
Y de aquí trataremos de obtener vectores:x = 0α + 1βy = 1α + 0βz = 0α + 1β
Entonces una base es {(0, 1, 0), (1, 0, 1)}.Se podría haber hecho de esta manera:
(x, y, z) = α(0, 1, 0) + β(1, 0, 1)
1.1.6. Intersección de subespaciosDada una familia {Vi} de susbespacios de V , la intersección
∩iVi = {x ∈ V |x ∈ Vi para cada i}
es también un subespacio vectorial de V .
Teorema 7. Si S es un sistema de vectores de V , entonces L(S) es la intersección de todos lossubespacios vectoriales que contienen a S.Es decir L(S) es el “menor” subespacio vectorial que contiene a S.

1.1. ESPACIOS VECTORIALES 23
1.1.7. Suma de subespaciosDados dos subespacios vectoriales V1 y V2 de V , se define
V1 + V2 = {~v1 + ~v2|~v1 ∈ V1 y ~v2 ∈ V2}
que es un “nuevo"subespacio vectorial que contiene a V1 ∪ V2. Obsérvese que la simple unión desubespacios no es subespacio vectorial.
Definición 6. Si V1 ∩ V2 = {~0}, a la suma de subespacios la llamamos suma directa de subespaciosy se representa V1 ⊕ V2.
Teorema 8. 1. Si V y W son subespacios tales que W ⊆ V , entonces
dimW ≤ dimV
2. Si W1,W2 son subespacios vectoriales de V , de dimensión finita, se tiene
dim(W1 +W2) = dim W1 + dim W2 − dim(W1 ∩W2)
En particular dim(W1 ⊕W2) = dim W1 + dim W2.
Ejemplo 16. Dado el espacio vectorial en R2 definimos los subespacios
V = {(x, y, z)|x− 2y + z = 0} W =x = 2λy = λz = 3µ
Calcular base, dimensión, ecuaciones cartesianas y paramétricas de V ,W , V ∪W y V ∩W .
Empezamos por VNos dan una ecuación cartesiana. Recordemos que:
número de parámetros (dimensión) = dim(V )(número de incógnitas)− número de ecuaciones
Entonces 3 incógnitas− 1 ecuación = 2 parámetros. Las ecuaciones paramétricas son:x = 2α− βy = αz = β
A partir de las ecuaciones paramétricas podemos ver fácilmente la base de V BV = {(2, 1, 0), (−1, 0, 1)}.La dimensión del subespacio es dimV = 2.Subespacio WNos dan las ecuaciones paramétricas que podemos poner de la formaxy
z
= λ
210
+ µ
003

24 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
para ver más fácilmente los vectores que constituyen la base del subespacio que es BW = {(2, 1, 0),(0, 0, 3)} y, por tanto, la dimensión de este es dimW = 2. Ahora hallamos las ecuaciones cartesianas:2 0 x
1 0 y0 3 z
F1−2F2−→
0 0 x− 2y1 0 y0 3 z
⇒ x− 2y = 0
Subespacio V ∪WJuntamos las bases de U y W para obtener un conjunto de generadores de V ∪W y luego vemos sihay que eliminar algún vector para obtener una base:∣∣∣∣∣∣
2 1 0−1 0 10 0 3
∣∣∣∣∣∣ = 3 6= 0
Luego, una base del subespacio V ∪ W es BV ∪W{(2, 1, 0), (−1, 0, 1), (0, 0, 3)} y su dimensión esdim(V ∪W ) = 3. Calculamos las ecuaciones paramétricas:xy
z
= α
210
+ β
−101
+ λ
003
⇒
x = 2α− βy = αz = β + 3λ
Vemos ahora cuantas ecuaciones cartesianas hay: 3 incógnitas− 3 parámetros = 0 ecuaciones. Por loque no hay ecuaciones cartesianas.Subespacio V ∩WReunimos las ecuaciones cartesianas de V y W para obtener unas ecuaciones cartesianas de V ∩Wy luego vemos si es posible eliminar alguna por transformaciones elementales:{
x− 2y + z = 0x− 2y = 0⇒ x = 2y
⇒ 2y − 2y + z = 0⇒ z = 0⇒{z = 0x = 2y
Ahora calculamos las ecuaciones paramétricas. Vemos primero cuantos parámetros son necesarios:3 incógnitas− 3 ecuaciones = 1 parámetro. Las ecuaciones paramétricas son:
x = 2αy = αz = 0
⇒
xyz
= α
210
Y una base del subespacio V ∩W es BV ∩W{(2, 1, 0)} y su dimensión es dim(V ∩W ) = 1.
1.2. Aplicaciones LinealesSi V y W son dos espacios vectoriales sobre un mismo cuerpo K, llamamos aplicación lineal de
V en W a una función f : V → W que verifica:
f(~u+ ~v) = f(~u) + f(~v) ∀~u,~v ∈ Vf(λ~v) = λf(~v) ∀λ ∈ K, ∀~v ∈ V

1.2. APLICACIONES LINEALES 25
• Si V = W entonces la aplicación lineal se llama endomorfismo.
• Si la aplicación lineal es inyectiva se dirá que es un monomorfismo.
• Si la aplicación lineal es sobreyectiva se dirá que es un epimorfismo.
• Si la aplicación lineal es biyectiva se dirá que es un isomorfismo.
Ejemplo 17. Estudiar si las siguientes funciones son aplicaciones lineales:a) f : R2 → R3 dada por f(x, y) = (x− y, 0, 2x+ 5y)b) f : R2 → R3 dada por f(x, y) = (x+ 1,−y, 2x+ 5y)c) f : P3[x]→ P3[x], dada por f [p(x)] = xp′(x)
a) f : R2 → R3 dada por f(x, y) = (x− y, 0, 2x+ 5y)∀λ, µ ∈ R y ∀(x1, x2), (y1, y2) ∈ R2 se tiene
f [λ(x1, x2) + µ(y1, y2)] = f(λx1 + µy1, λx2 + µy2) = (λx1 + µy1 − λx2 − µy2, 0, 2λx1 + 2µy1+
+ 5λx2 + 5µy2)
λf(x1, x2) + µf(y1, y2) = λ(x1 − x2, 0, 2x1 + 5x2) + µ(y1 − y2, 0, 2y1 + 5y2) = (λx1 + µy1−− λx2 − µy2, 0, 2λx1 + 2µy1 + 5λx2 + 5µy2)
Por lo tanto, f es una aplicación lineal. Podríamos haberlo demostrado también de la siguiente forma:
f [λ(x1, x2) + µ(y1, y2)] = f(λx1 + µy1, λx2 + µy2) = (λx1 + µy1 − λx2 − µy2, 0, 2λx1 + 2µy1+
+ 5λx2 + 5µy2) = (λ(x1 − x2) + µ(y1 − y2), 0, λ(2x1 + 5x2) + µ(2y1 + 5y2)) = λ(x1 − x2, 0,2x1 + 5x2) + µ(y1 − y2, 0, 2y1 + 5y2) = λf(x1, x2) + µf(y1, y2)
Pero resulta más sencillo separar las dos expresiones que tenemos que demostrar que son iguales yver si al desarrollarlas da lo mismo.b) f : R2 → R3 dada por f(x, y) = (x+ 1,−y, 2x+ 5y)f(0, 0) = (1, 0, 0) 6= (0, 0, 0). Por tanto, f no es una aplicación lineal.c) f : P3[x]→ P3[x], dada por f [p(x)] = xp′(x)Sean p(x), q(x) ∈P3(R) y λ, µ ∈ R
f [λp(x) + µq(x)] = x[λp(x) + µq(x)]′ = x[λp′(x) + µq′(x)] = λxp′(x) + µxq′(x) =
= λf [p(x)] + µf [q(x)]
Por tanto, f es una aplicación lineal. Esta vez no hemos separado las expresiones porque el ejerciciono era largo.
1.2.1. PropiedadesSi f : V → W es una aplicación lineal sobre un cuerpo K, se tiene
• f(~u− ~v) = f(~u)− f(~v)
• f(~0V ) = ~0W

26 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Caracterización de una aplicación lineal f : V → W es una aplicación lineal si y sólo si, ∀~u,~v ∈V ∀λµ ∈ K
f(λ~u+ µ~v) = λf(~u) + µf(~v)
Teorema 9. Si V es un espacio vectorial de dimensión finita n sobre un cierto cuerpo K, entonces Ves isomorfo a Kn.Es decir los espacios vectoriales de dimensión finita podemos considerarlos como conjuntos den-tuplas sobre un cierto K.
1.2.2. Matriz de una aplicación linealSean U y V dos espacios vectoriales, sobre un cuerpoK. Si B1 = {~u1, ~u2, . . . , ~um} es una base de
U y B2 = {~v1, ~v2, . . . , ~vn} es una base de V , entonces cada vector f(ui) se puede expresar respectode la base B2 como:
f(u1) = a11v1 + · · ·+ a1nvn...
...f(ui) = ai1v1 + · · ·+ ainvn
......
f(um) = am1v1 + · · ·+ amnvn
Llamaremos matriz de f o matriz asociada a f respecto de las bases B1 y B2 a la matriz
MB1B2(f) =
a11 a12 · · · a1na21 a22 · · · a2n
...... . . .
...am1 am2 · · · amn
cuyas columnas son las coordenadas respecto de B′ de las imágenes por f de los vectores de B. Portanto, ~v = f(~u) si y solo si
ξB2(v) = MB1B2(f)ξB1(u)
Ejemplo 18. Dada una aplicación lineal
f(x, y, z) = (x+ 2y − 4z, 2x+ 3y + z)
Calcular la matriz asociada respecto de las bases canónicas.
f(1, 0, 0) = (1, 2)f(0, 1, 0) = (2, 3)f(0, 0, 1) = (−4, 1)
⇒(
1 2 −42 3 1
)
1.2.3. Cambio de base en aplicaciones linealesSean U y V dos espacios vectoriales de dimensiones m y n.
Consideremos dos bases de U
u =
u1...um
u′ =
u′1...u′m

1.2. APLICACIONES LINEALES 27
y dos bases de V
v =
v1...vm
v′ =
v′1...v′m
por tanto, (u′) = Pu y (v′) = Qv. Si A es la matriz asociada a f respecto de las bases u y v y A′ esla matriz asociada a f respecto de las bases u′ y v′ se tiene que:
A′ = PAQ−1
Ejemplo 19. Consideremos la aplicación lineal f : R2 → R2|f(x, y) = x− 2y, x+ y. Cal-cule la matriz de f , MC(f), respecto de la base canónica. Calcule la matriz de f , MB(f),respecto de la baseB = {(1,−1), (1, 0)}
Recordemos que la base canónica en este caso es C = {(1, 0), (0, 1)} y cuando escribimos MC(f)significa MCC(f). Entonces para construir MC(f), hacemos:
f(1, 0) = (1, 1)f(0, 1) = (−2, 1)
⇒MC(f) =
(1 −21 1
)Para calcularMB(f) tenemos dos opciones, o bien, hacerlo directamente por definición de la matriz deuna aplicación lineal o aplicando una fórmula correspondiente a un cambio de base en una aplicaciónlineal. Primero lo haremos aplicando dicha fórmula. Observemos que queremos calcular MB(f), quees lo mismo que MBB(f), lo que quiere decir que en el espacio inicial y en el espacio final estamosconsiderando la base B. Nosotros tenemos MC(f) que es:
R2 f−→ R2
C C
Y lo que queremos es empezar por B y acabar en B, entonces tenemos
R2 −→ R2 f−→ R2 −→ R2
B 1a C 2a C 3a B
donde vemos que hay tres aplicaciones. Y ahora vamos a escribir a partir de este diagrama la fórmulade cambio de base. Si hacemos todo en un paso, si vamos del inicio hasta el final, empezamos porB y acabamos por B, luego tenemos MB(f). Esto sería lo mismo que si ahora vamos por pasos, yaque igualmente empezaremos en el inicio y acabaremos en el final. Observemos que tendremos unamatriz por cada aplicación, luego tendremos tres matrices. Ahora, siempre que tenemos una matriz,para calcular la imagen colocamos el vector en columna al final. Luego si queremos calcular unaimagen con tres matrices pondremos el vector al final, y al poner el vector al final, la primera matrizque actuará será la que está justo al lado de ella. Entonces tenemos
MB(f) = PCBMC(f)PBC
de donde conocemos la matriz MC(f) y tenemos que calcular las otras dos, que son matrices de paso.La matriz de paso más sencilla de calcular es PBC , que es:
PBC =
(1 1−1 0
)

28 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Ahora calculamos PCB que es la inversa de la que acabamos de hallar. La calculamos por Gaussmismamente: (
1 1 1 0−1 0 0 1
)−→F2+F1
(1 1 1 00 1 1 1
)F1−F2−→
(1 0 0 −10 1 1 1
)Entonces tenemos
PCB = P−1BC =
(1 1−1 0
)−1=
(0 −11 1
)Solo nos queda hacer el producto:
MB(f) =
(0 −11 1
)(1 −21 1
)(1 1−1 0
)=
(−1 −12 −1
)(1 1−1 0
)=
(0 −13 2
)Calcularemos ahora MB(f) a partir de la definición de una aplicación lineal. Cogemos el primervector de la base B, calculamos su imagen y ponemos las componentes en coordenadas de la base B:
f(1,−1) = (3, 0)⇒ (3, 0) = α(1,−1) + β(1, 0) = (α + β,−α)
Entonces hay que calcular α y β que serán las coordenadas del vector (3, 0) de la imagen respecto dela base B: {
α + β = 3
−α = 0⇒ α = 0⇒ β = 3
Y esto se escribe en la primera columna de nuestra matriz:
MB(f) =
(03
)Hacemos lo mismo con el segundo vector de la base B:
f(1, 0) = (1, 1)⇒ (1, 1) = α(1,−1) + β(1, 0) = (α + β,−α)⇒
{α + β = 1⇒ β = 2
−α = 1⇒ α = −1
Y nuestra matriz queda:
MB(f) =
(0 −13 2
)Ejemplo 20. Sean las bases de R2 B = {(1, 1), (1, 0)} y B′ = {(2, 1), (0, 1)} hallar la ma-triz de cambio de base de B a B′.
Consideremos que un vector en la base B tiene coordenadas (t1, t2) y en la base B′ (x1, x2). En-tonces:
t1
(11
)+ t2
(10
)= x1
(21
)+ x2
(01
)⇒(
1 11 0
)(t1t2
)=
(2 01 1
)︸ ︷︷ ︸
A
(x1x2
)⇒
⇒(x1x2
)=
(2 01 1
)−1(1 11 0
)(t1t2
)

1.2. APLICACIONES LINEALES 29
Hallamos la matriz inversa:∣∣∣∣2 01 1
∣∣∣∣ = 2 6= 0; Adj(A) =
(1 −10 2
);(Adj(A)
)t=
(1 0−1 2
);
A−1 =1
|A|(Adj(A)
)t=
1
2
(1 0−1 2
)Y, entonces, tenemos:
1
2
(1 0−1 2
)(1 11 0
)=
1
2
(1 1
−1 + 2 −1
)⇒(x1x2
)=
1
2
(1 11 −1
)(t1t2
)Ejemplo 21. Supongamos que tenemos la aplicación lineal f : R2 −→ R3 y sea B1 = {(0, 1), (−1, 1)}una base del espacio inicial o dominio y B2 = {(−1, 1, 0), (0, 1, 1), (−1, 0, 0)} una base delespacio final o codominio. Supongamos que la matriz de f respecto de las bases B1 y B2 es:
MB1B2(f) =
1 −1−1 02 −1
Calcule la expresión analítica de f .
Queremos calcular f(x, y) y el vector (x, y) viene dado por sus componentes, por tanto para poderutilizar la matriz anterior tenemos que hallar las componentes del vector en la base B1:
(x, y) = α(0, 1) + β(−1, 1) = (−β, α + β)⇒{−β = x⇒ β = −xα + β = y ⇒ α = x+ y
Entonces las coordenadas de (x, y) respecto de B1 son (x + y,−x). Ahora ya podemos utilizar lamatriz anterior:
MB1B2(f)
(x+ y−x
)=
1 −1−1 02 −1
(x+ y−x
)=
x+ y + x−x− y
2x+ 2y + x
=
2x+ y−x− y3x+ 2y
Con lo que hallamos las coordenadas respecto a B2 de la imagen de (x, y) f(x, y). Pero lo quequeremos son las componentes de f(x, y), por tanto hacemos:
(2x+ y,−x− y, 3x+ 2y) = (2x+ y)(−1, 1, 0) + (−x− y)(0, 1, 1) + (3x+ 2y)(−1, 0, 0) =
= (−2x− y, 2x+ y, 0) + (0,−x− y,−x− y) + (−3x− 2y, 0, 0) = (−5x− 3y, x,−x− y)
Y esta es la expresión coordenada o la expresión analítica de f .
1.2.4. Núcleo e Imagen de una aplicación linealDefinición 7. Sea f : V → W una aplicación lineal. Llamamos núcleo de f (ker f ) al conjunto devectores de V cuya imagen es el elemento neutro de W .
ker f = {~v ∈ V |f(~v) = ~0W}

30 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Definición 8. Llamamos imagen de f (Im f ) al conjunto de vectores de W que son imágenes bajo fde vectores de V .
Im f = {~w ∈ W |∃~v ∈ V |f(~v) = ~w}
Teorema 10. Si f : V → W es una aplicación lineal entre dos e.v. sobre un cuerpo K, se tiene que:
1. ker f es un subespacio vectorial de V
2. Im f es un subespacio vectorial de W
Ejemplo Calcular núcleo e imagen de las siguientes aplicaciones lineales.
Teorema 11. Dada una aplicación lineal f : V → W y un sistema generador de V , {~v1, ~v2, · · · , ~vp},se tiene que los vectores {f(~v1), f(~v2), · · · , f(~vp)} forman un sistema generador de Im(f).
Teorema 12. Sea f : V → W una aplicación lineal donde V es un e.v. de dimensión finita. Entoncesse verifica
dim(V ) = dim(ker f) + dim(Im f)
Teorema 13. Sea f : V → W una aplicación lineal. Entonces:
1. f es inyectiva si y sólo si ker f = {~0V }
2. f es sobreyectiva si y sólo si Im f = W
Teorema 14. Sean V y W dos espacios vectoriales de dimensión n y f : V → W una aplicaciónlineal. Entonces son equivalentes:
1. f es biyectiva
2. f es inyectiva
3. f es sobreyectiva
4. dimensión de Im(f) = rang(f) = n
5. dimensión de ker(f) =nulidad de f = nul(f) = 0
Ejemplo 22. Estudia la inyectividad y sobreyectividad de la aplicación lineal del ejemplo 33.
Esto se podría hacer por definición. Ver que es inyectiva, o sea, que si dos elementos tienen la mismaimagen coinciden, y ver que es sobreyectiva, ver que todo elemento del espacio final tiene imageninversa. Sin embargo, al tratarse de una aplicación lineal esto se puede caracterizar a partir del rangode una cualquiera de sus matrices. En el ejemplo 33 calculamos la matriz de f respecto de la basecanónica y respecto de la base B. Es decir, tenemos dos matrices de f y podemos utilizar cualquierade ellas, incluso la base inicial y la final pueden ser distintas. Lo que tenemos que hacer es calcular elrango de una cualquiera de esas matrices. Por propiedades se cumple que estas matrices al representara la misma aplicación lineal son equivalentes y por lo tanto van a tener el mismo rango. Elegimos porejemplo MB(f):
rangMB(f) = rang
(0 −13 2
)= 2 ya que
∣∣∣∣0 −13 2
∣∣∣∣ = 3 6= 0

1.2. APLICACIONES LINEALES 31
Ahora tenemos que ver si este rango es igual a la dimensión del espacio inicial, que en este caso altratarse de R2 es 2. Entonces como rang(f) = dimR2 = 2 la aplicación lineal es inyectiva. Y ahorapara ver si es sobreyectiva, por las propiedades de las aplicaciones lineales, tenemos que comprobarsi ese rango coincide con la dimensión del espacio final. Entonces, como rang(f) = dimR2 = 2 f essobreyectiva. Y como f es inyectiva y sobreyectiva obtenemos que f es biyectiva. Y a una aplicaciónlineal biyectiva se la llama isomorfismo.
Ejemplo 23. Dado un endomorfismo en R3 con f(x, y, z) = (z, x+ y,−z). Caracterizar laaplicación.
Para ver si f es inyectiva calculamos el núcleo de f :
f(x, y, z) = (0, 0, 0)⇒
z = 0x+ y = 0−z = 0
⇒ x = −y ; z = 0
Una base de ker f es entonces B = {(−1, 1, 0)} y al ser distinta de {(0, 0, 0)} la aplicación no esinyectiva.
Para ver si f es sobreyectiva calculamos la imagen de f . Un sistema de generadores de Im fvendrá dado por:
{f(1, 0, 0), f(0, 1, 0), f(0, 0, 1)}
o lo que es igual{(0, 1, 0), (0, 1, 0), (1, 0,−1)}
A partir de este sistema de generadores se obtiene la base de Im f :
{(0, 1, 0), 1, 0,−1}
No es sobreyectiva porque dim(Im f) 6= dimR3.
Ejemplo 24. Determinar si la siguiente aplicación es lineal:
f : R3 → R2|f(x, y, z) = (x+ y + z, 2x− y)
Consideramos dos vectores cualesquiera de R3: ~u = (x, y, z), ~v = (x′, y′, z′). Entonces tenemosque comprobar que f(λ~u+ µ~v) = λf(~u) + µf(~v):
f [λ(x, y, z) + µ(x′, y′, z′)] = f(λx+ µx′, λy + µy′, λz + µz′) = (λx+ µx′ + λy + µy′ + λz+
+ µz′, 2λx+ 2µx′ − λy − µy′) = (λx+ λy + λz, 2λx− λy) + (λx′ + λy′ + λz′, 2λx′ − λy′) =
λf(x, y, z) + µf(x′, y′, z′)
Por tanto, es una aplicación lineal.
Ejemplo 25. Determinar si la siguiente aplicación es lineal:
f : R2 → R3|f(x, y) = (x, y + 2, x+ y)

32 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
∀λ, µ ∈ R y ∀(x1, x2), (y1, y2) ∈ R2 se tiene que cumplir la igualdad f(~u + ~v) = f(~u) + f(~v), portanto:
f(~u+ ~v) = f [(x1, x2) + (y1, y2)] = f(x1 + y1, x2 + y2) = (x1 + y1, x2 + y2 + 2, x1 + y1 + x2 + y2)
f(~u) + f(~v) = f(x1, x2) + f(y1, y2) = (x1, x2 + 2, x1 + x2) + (y1, y2 + 2, y1 + y2) = (x1 + y1, x2+
+ y2 + 4, x1 + x2 + y1 + y2)
Comparando los resultados vemos que no son iguales, y por tanto, no es una aplicación lineal.
Ejemplo 26. Hallar una base del núcleo y otra de la imagen y caracterizar la aplicación:
f : R3 → R2|f(x, y, z) = (x+ y + z, 2x− y)
Calculamos una base del núcleo. Para ello buscamos unas ecuaciones paramétricas:
f(x, y, z) = (0, 0, 0)x+ y + z = 02x− y = 0⇒ y = 2x
⇒ x+ 2x+ z = 0⇒ z = −3x⇒{y = 2xz = −3x
3 incógnitas −2 ecuaciones = 1 parámetro. Por tanto:x = αy = 2αz = −3α
Y entonces una base del núcleo es {(1, 2,−3)}. Calculamos un sistema de generadores de la imagende f :
f(1, 0, 0) = (1, 2)
f(0, 1, 0) = (1,−1)
f(0, 0, 1) = (1, 0)
En R2 una base tiene dos vectores, luego tenemos que escoger dos de los tres que sean lienalmente
independientes, como por ejemplo∣∣∣∣1 −11 0
∣∣∣∣ = 1 6= 0. Por lo que una base será B = {(1, 0), (1,−1)}.
Ahora caracterizamos la aplicación. Dado que el núcleo de f es distinto del {(0, 0, 0)}, la aplicaciónno es inyectiva. Como dim(Im f) = dimR2 la aplicación es sobreyectiva.

1.3. EJERCICIOS DE INICIACIÓN. ESPACIOS VECTORIALES 33
1.3. Ejercicios de iniciación. Espacios vectoriales
1. En R2 definimos la operación interna: (x, y) + (x′, y′) = (x+ x′, y + y′) y la operaciónexterna: λ(x, y) = (λx, 0), con λ ∈ R. Estudiar si R2, con dichas operaciones es espacio vec-torial sobreR.
Tenemos que comprobar si se cumplen las propiedades de espacio vectorial, para ello vemos pri-mero si el par (R2,+) es un grupo abeliano:La suma de números reales es asociativa y conmutativa.El elemento neutro es el (0, 0)El elemento simétrico de (x, y) es (−x,−y).Por tanto, el par (R2,+) es un grupo abeliano. Ahora solo nos falta verificar las propiedades de laoperación externa:a) λ
((x, y) + (x′, y′)
)= λ(x + x′, y + y′) =
(λ(x + x′), 0
)= (λx + λx′, 0) = (λx, 0) + (λx′, 0) =
λ(x, y) + λ(x′, y′)b) (λ+ µ)(x, y) =
((λ+ µ)x, 0
)=(λx+ µx, 0
)= (λx, 0) + (µx, 0) = λ(x, y) + µ(x, y)
c) (λµ)(x, y) =((λµ)x, 0
)=(λ(µx), 0
)=(λ(µx, 0)
)= λ
(µ(x, y)
)d) 1(x, y) = (x, 0) 6= (x, y)Como no se cumple la propiedad d), no es espacio vectorial.
2. En R2 definimos la operación interna: (x, y) + (x′, y′) = (x+ x′, y + y′) y la operaciónexterna: λ(x, y) = (λ2x, λ2y), con λ ∈ R. Estudiar si R2, con dichas operaciones es espaciovectorial sobreR.
Tenemos que comprobar si se cumplen las propiedades de espacio vectorial, para ello vemos pri-mero si el par (R2,+) es un grupo abeliano:La suma de números reales es asociativa y conmutativa.El elemento neutro es el (0, 0)El elemento simétrico de (x, y) es (−x,−y).Por tanto, el par (R2,+) es un grupo abeliano. Ahora solo nos falta verificar las propiedades de laoperación externa:a) λ
((x, y) + (x′, y′)
)= λ(x+ x′, y + y′) =
(λ2(x+ x′), λ2(y + y′)
)= (λ2x+ λ2x′, λ2y + λ2y′) =
(λ2x, λ2y) + (λ2x′, λ2y′) = λ(x, y) + λ(x′, y′)b) (λ + µ)(x, y) =
((λ + µ)2x, (λ + µ)2y
)=((λ2 + 2λµ + µ2)x, (λ2 + 2λµ + µ2)y
)= (λ2x +
2λµx+ µ2x, λ2y + 2λµy + µ2y) 6= λ(x, y) + µ(x, y) = (λ2x+ µ2y, λ2y + µ2y)Como no se cumple la propiedad distributiva respecto a la suma de escalares, no es espacio vectorial.
3. Consideremos el espacio vectorial R2 sobre el cuerpo R. Demostrar si los siguientes subcon-juntos son subespacios vectoriales.a)A = {(x, y) ∈ R2 : x− 2y = 0}.b)A = {(x, y) ∈ R2 : xy > 0}.c)A = {(x, y) ∈ R2 : x+ y = 1}.d)A = {(x, y) ∈ R2 : x ∈ Z, y ∈ N}.
a)A = {(x, y) ∈ R2 : x− 2y = 0}Veamos si A es subespacio vectorial de R2. Sean ~v = (2x, x) y ~w = (2y, y) dos elementos de A:
λ~v + µ~w = λ(2x, x) + µ(2y, y) = (2λx+ 2µy, λx+ µy) =(2(λx+ µy), λx+ µy
)

34 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Como el vector resultante es elemento de A, este es subespacio vectorial de R2.
b)A = {(x, y) ∈ R2 : xy > 0}No es subespacio vectorial ya que ~0 /∈ A.
c)A = {(x, y) ∈ R2 : x+ y = 1}.Sean (1− x, x) y (1− y, y) dos elementos de A:
λ(1− x, x) + µ(1− y, y) = (λ− λx, λx) + (µ− µy, µy) =(λ+ µ− (λx+ µy), λx+ µy
)El vector resultante no pertenece a A porque el término λ+ µ puede ser cualquier número real y sólonos vale el uno. Por tanto, A no es subespacio vectorial de R2.
d)A = {(x, y) ∈ R2 : x ∈ Z, y ∈ N}.
λ(x, y) + µ(x′, y′) = (λx+ µy, λx′ + µy′)
Como λ, µ ∈ R al hacer λx+µy podríamos obtener cualquier número real que no tendría porque per-tenecer a los enteros. Igualmente al hacer λx′+µy′ el número resultante no tendría porque pertenecera los naturales. Por tanto, el vector resultante no pertenece a A en todos los casos posible y entoncesA no es subespacio vectorial de R2.
4. Dado el espacio vectorial real R4 consideramos los subespacios:
• V1 = 〈(1, 2, 0, 1)〉.
• V2 = {(x, y, z, t) ∈ R4 : x− y + z + t = 0, y − z = 0}.
• V3 = {(x, y, z, t) ∈ R4 : x = λ, y = λ+ µ, z = γ, t = µ}.
¿Pertenece el vector ~v = (2, 4, 0, 2) a alguno de estos subespacios?. En caso afirmativo calcu-lar sus coordenadas en alguna de sus bases.Un vector pertenece a un subespacio si se puede poner como combinación lineal de los vectoresque conforman la base de ese subespacio.
V1 = 〈(1, 2, 0, 1)〉(2, 4, 0, 2) = λ(1, 2, 0, 1). Por tanto, como al multiplicar (1, 2, 0, 1) por el parámetro λ = 2 da(2, 4, 0, 2) ese vector esta contenido en V1, ~v ∈ V1. Si elegimos como base de V1 al propio vector(1, 2, 0, 1) la coordenada del vector ~v en esa base es 2.V2 = {(x, y, z, t) ∈ R4 : x− y + z + t = 0, y − z = 0}.Cogemos y − z = 0. Como para y = 4, z = 4 6= 2, V2 no contiene al vector (2, 4, 0, 2).V3 = {(x, y, z, t) ∈ R4 : x = λ, y = λ+ µ, z = γ, t = µ}.Las ecuaciones paramétricas son
x = λy = λ+ µz = γt = µ
Un sistema de generadores de V3 es S = {(1, 1, 0, 0), (0, 1, 0, 1), (0, 0, 1, 0)}. A simple vista podemoscomprobar que es un sistema linealmente independiente, por lo que podemos tomarlo como una base

1.3. EJERCICIOS DE INICIACIÓN. ESPACIOS VECTORIALES 35
de V3. Para hallar las coordenadas del vector (2, 4, 0, 2) respecto a esta base buscamos una combina-ción lineal:
(2, 4, 0, 2) = α(1, 1, 0, 0) + β(0, 1, 0, 1) + γ(0, 0, 1, 0)
Ahora solucionamos el sistema: α = 2α + β = 4γ = 0
⇒
α = 2β = 2γ = 0
(1.1)
Por tanto, ~v ∈ V3, y las coordenadas de ~v en la base S serán (2, 2, 0).
5. En el espacio vectorial V = M2×2(R), estudiar si los siguientes subconjuntos son subespa-cios vectoriales y, en caso afirmativo, encontrar una base:a)W = {A ∈M2×2(R) : A = At}.b)W = {A ∈M2×2(R) : |A| = 0}.c)W = {A ∈M2×2(R) : |A| 6= 0}.d)W = {A ∈M2×2(R) : tr(A) = 0}.
a)W = {A ∈M2×2(R) : A = At}
Un elemento típico de W es(a bb c
)por lo que tenemos que:
λ
(a bb c
)+ µ
(a′ b′
b′ c′
)=
(λa+ µa′ λb+ µb′
λb+ µb′ λc+ µc′
)Como el elemento resultante pertenece a W , W es subespacio vectorial de V . Una base del subcon-junto W es:
B =
{(1 00 0
),
(0 11 0
),
(0 00 1
)}b)W = {A ∈M2×2(R) : |A| = 0}
Demos un contraejemplo para demostrar que W no es subespacio vectorial de V . Sean(
1 00 0
)y(
0 00 1
)elementos de W , entonces
(1 00 0
)+
(0 00 1
)=
(1 00 1
)/∈ W
c)W = {A ∈M2×2(R) : |A| 6= 0}
Demos de nuevo un contraejemplo. Sean(
1 02 1
)y(
1 20 1
)elementos de W , entonces
(1 02 1
)+
(1 20 1
)=
(2 22 2
)/∈ W
Además, otra forma de demostrar que W no es subespacio vectorial de V , es viendo que el vector
nulo ~0 =
(0 00 0
)/∈ W .

36 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
d)W = {A ∈M2×2(R) : tr(A) = 0}
Sea(a bc −a
)un elemento de W , entonces
λ
(a bc −a
)+ µ
(a′ b′
c′ −a′)
=
(λa+ µa′ λb+ µb′
λc+ µc′ −(λa′ + µa′)
)Como la traza de la matriz resultante es cero, esta pertenece al subconjunto W y por tanto este essubespacio vectorial de V .
6. En el espacio vectorialR3, consideramos el sistemaS = {(1, 1, a), (1, a, 1), (a, 1, 1)}. Es-tudiar, en función de a, la dimensión del subespacio vectorial engendrado por S, es decir,L(S).
Veamos para que valor de a se anula el determinante de la matriz A formada por el sistema:∣∣∣∣∣∣1 1 a1 a 1a 1 1
∣∣∣∣∣∣ = a+ a+ a− a3 − 1− 1 = −a3 + 3a− 2 = 0
−1 0 3 −21 −1 −1 2−1 −1 2 0
1 −1 −2−1 −2 0
−2 2−1 0
(a− 1)(a− 1)(a+ 2) = 0
a = 1a = −2
}
Hay que calcular el rango para cada valor de a, ya que en este caso rangA = dimL(S).i) Para a = 1 todos los vectores son iguales y por tanto dimL(S) = 1.ii) Para a = −2 tenemos que: ∣∣∣∣1 1
1 −2
∣∣∣∣ = −2− 1 = −3 6= 0
Por tanto dimL(S) = 2.iii) Para a 6= 1 y a 6= −2, dimL(S) = 3.
7. Consideremos el espacio vectorial V = {a+ bx+ cx2 : a, b, c ∈ R} con la suma y el pro-ducto por escalares habituales. Probar que el conjunto B = {1 + x, x+ x2, 1 + x2} es unabase de V . Encontrar las coordenadas del polinomio p(x) = 2− x− x2 en la baseB. ¿Puedeser el conjuntoC = {1, 1− x, 1− x2, 1− x− x2} una base de V ?. De no ser así, obtenga apartir de C, una base de V .
Veamos si B es una base de V : ∣∣∣∣∣∣1 0 11 1 00 1 1
∣∣∣∣∣∣ = 1 + 1 = 2 6= 0

1.3. EJERCICIOS DE INICIACIÓN. ESPACIOS VECTORIALES 37
Por tanto, B es base de V . Encontramos ahora las coordenadas del polinomio p(x) = 2 − x − x2 enla base B:
2− x− x2 = α(1, 1, 0) + β(0, 1, 1) + γ(1, 0, 1)⇒
2 = α + γ−1 = α + β−1 = β + γ
⇒ α = 2− γ ⇒
⇒ −1 = 2− γ + β ⇒ β = γ − 3⇒ −1 = γ − 3 + γ ⇒ 2γ = 2⇒ γ = 1 ; α = 1 ; β = −2
Por tanto, las coordenadas del polinomio p(x) = 2− x− x2 en la base B son (1,−2, 1).El conjunto C no puede ser una base del espacio vectorial V , porque la dimensión de este es tres ydebe coincidir con el número de vectores de una base, por lo que al menos un vector será linealmentedependiente. Buscamos una base a partir del conjunto C:
1 0 01 −1 01 0 −11 −1 −1
F2−F1−→F3−F1F4−F1
1 0 00 −1 00 0 −10 −1 −1
−→F4−F1
1 0 00 −1 00 0 −10 0 −1
Por tanto, una base de V es C = {(1, 0, 0), (0,−1, 0), (0, 0,−1)}.
8. Justifique la veracidad o falsedad de los siguientes enunciados:a) En un espacio vectorial, todo sistema generador es libre y por tanto base.b) En R3 todo sistema con menos de 3 vectores es libre.c) En el espacio vectorial R3[x], los vectores 2− x y 2x2 − x3 son dependientes.
a) Falso, un sistema generador no siempre es libre, y por tanto no siempre es base.b) Falso, por ejemplo el sistema {(1, 0, 0), (0, 0, 0)} no es libre porque contiene al vector cero.c) Falso, son linealmente independientes porque no podemos poner uno como combinación lineal delotro.
9. Dadas las basesB1 = {(1, 2, 3), (3, 4, 0), (1, 1, 0)} yB2 = {(1, 1, 0), (0, 1, 1), (1, 0, 1)},encuentra las coordenadas enB1 del vector cuyas coordenadas enB2 son (1, 1, 1).
En lugar de expresar cada vector de B2 como combinación lineal de B1, observemos que tenemoslas matrices de cambio de base de B1 a la base canónica
P =
1 3 12 4 13 0 0
y también B2 a la base canónica
Q =
1 0 11 1 00 1 1
Entonces si llamamosX1,X2 yX a las coordenadas en las basesB1,B2 y canónica, respectivamente,tenemos que PX1 = X y QX2 = X y entonces PX1 = QX2 ⇒ X1 = P−1QX2. Calculamos

38 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
entonces P−1: 1 3 1 1 0 02 4 1 0 1 03 0 0 0 0 1
F2−2F1−→F3−3F1
1 3 1 1 0 00 −2 −1 −2 1 00 −9 −3 −3 0 1
F2=F3−→F3=9F2
1 3 1 1 0 00 −9 −3 −3 0 10 −18 −9 −18 9 0
−→F3−2F2
1 3 1 1 0 00 −9 −3 −3 0 10 0 −3 −12 9 −2
F2−F3−→− 1
3F3
1 3 1 1 0 00 −9 0 9 −9 30 0 1 4 −3 2
3
F1−F3−→− 1
9F2
1 3 0 −3 3 −23
0 1 0 −1 1 −13
0 0 1 4 −3 23
F1−3F2−→
1 0 0 0 0 13
0 1 0 −1 1 −13
0 0 1 4 −3 23
Por tanto P−1 es:
P−1 =1
3
0 0 1−3 3 −112 −9 2
Calculamos P−1 de la otra forma que deberíamos recordar, para la que tenemos que seguir los si-guientes pasos:
(aij)→ (αij)→ (Aij)→ (Aji)→ A−1 =1
|A|(Aji) =
(Aji|A|
)Siendo αij los menores complementarios de cada elemento y Aij Hallamos |P | y solo si no es nuloseguimos adelante: ∣∣∣∣∣∣
1 3 12 4 13 0 0
∣∣∣∣∣∣ = 9− 12 = −3
Formamos una nueva matriz con los menores complementarios de cada elemento: 0 −3 −120 −3 −9−1 −1 −2
Cambiamos el signo alternativamente para obtener los adjuntos: 0 3 −12
0 −3 9−1 1 −2
Trasponemos la matriz: 0 0 −1
3 −3 1−12 9 −2
Dividimos cada elemento por |P |. Si no son divisibles, es más cómodo sacar factor común
1
|P |:
P−1 =1
3
0 0 1−3 3 −112 −9 2
1.3. EJERCICIOS DE INICIACIÓN. ESPACIOS VECTORIALES 39
Ahora calculamos
P−1Q =1
3
0 0 1−3 3 −112 −9 2
1 0 11 1 00 1 1
=1
3
0 1 1−3 + 3 3− 1 12 + 212− 9 −9 + 2 12 + 2
=1
3
0 1 10 2 143 −7 14
Por último usamos esta matriz para calcular las coordenadas del vector cuyas coordenadas en B2 son(1, 1, 1):
1
3
0 1 10 2 143 −7 14
111
=1
3
1 + 12 + 14
3− 7 + 14
=1
3
21610
10. Un vector ~v ∈ R3 tiene las coordenadas (1, 2, 1) expresado en la baseB1 = {v1, v2, v3}.
Determina sus coordenadas en la baseB2 = {w1, w2, w3} sabiendo que v1 = w1 − w3, v2 == w2 + w3, v3 = w1 + w2 − w3. Expresa matricialmente el cambio de base deB1 aB2.
Si las coordenadas de x en la base B1 son (1, 2, 1) entonces
x = v1 + 2v2 + v3 = w1 − w3 + 2w2 + 2w3 + w1 + w2 − w3 = 2w1 + 3w2
Por tanto, las coordenadas de x en la base B2 son (2, 3, 0). El cambio de base de B1 a B2 expresadomatricialmente es:
PB2B1 =
1 0 10 1 1−1 1 −1

40 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
1.4. Ejercicios de iniciación. Aplicaciones lineales1. Determinar si las siguientes aplicaciones son lineales:
a) f : R2 → R3 dada por f(x, y) = (x− y, 0, 2x+ 5y)b) f : R2 → R3 dada por f(x, y) = (x+ 1,−y, 2x+ 5y)c) f : P3[x]→ P3[x], dada por f [p(x)] = xp′(x)d) f : M2×2(R)→M2×2(R) dada por f(A) = AAt
e) f : R3 →M2×2(R) dada por
f(x, y, z) =
(x x− y0 y + z
)
a) Este apartado está resuelto en el ejemplo 17 de la página 25.b) Este apartado está resuelto en el ejemplo 17 de la página 25.c) Este apartado está resuelto en el ejemplo 17 de la página 25.d) f : M2×2(R)→M2×2(R) dada por f(A) = AAt
Sean A,B ∈M2×2(R) y sean λ, µ ∈ R
f(λA+ µB) = (λA+ µB)(λA+ µB)t = (λA+ µB)(λAt + µBt) = λ2AAt + µ2BBt+
+ λµABt + λµAtB 6= λAAt + µBBt = λf(A) + µf(B)
Por tanto, f no es una aplicación lineal.e) f : R3 →M2×2(R) dada por
f(x, y, z) =
(x x− y0 y + z
)∀λ, µ ∈ R y ∀(x, y, z), (x′, y′, z′) ∈ R3 se tiene
f [λ(x, y, z) + µ(x′, y′, z′)] = f(λx+ µx′, λy + µy′, λz + µz′) =(λx+ µx′ λx+ µx′ − λy − µy′
0 λy + µy′ + λz + µz′
)=
(λx λx− λy0 λy + λz
)+
(µx′ µx′ − µy′0 µy′ + µz′
)= λ
(x x− y0 y + z
)+
+ µ
(x′ x′ − y′0 y′ + z′
)= λf(x, y, z) + µf(x′, y′, z′)
Por tanto, f es una aplicación lineal.
2. Calcular la matriz de la aplicación en las bases canónicas:a) f : R3 −→ R3 dada por f(x, y, z) = (z, x+ y,−z)b) f : R3 −→ R2 dada por f(x, y, z) = (x+ y, 0)c) f : R2 −→ R2 dada por f(x, y) = (y, x)d) f : R3 −→ R2 dada por f(x, y, z) = (y, z)
a) f : R3 −→ R3 dada por f(x, y, z) = (z, x+ y,−z)
f(1, 0, 0) = (0, 1, 0)f(0, 1, 0) = (0, 1, 0)f(0, 0, 1) = (1, 0,−1)
⇒
0 0 11 1 00 0 −1

1.4. EJERCICIOS DE INICIACIÓN. APLICACIONES LINEALES 41
b) f : R3 −→ R2 dada por f(x, y, z) = (x+ y, 0)
f(1, 0, 0) = (1, 0)f(0, 1, 0) = (1, 0)f(0, 0, 1) = (0, 0)
⇒(
1 1 00 0 0
)c) f : R2 −→ R2 dada por f(x, y) = (y, x)
f(1, 0) = (0, 1)f(0, 1) = (1, 0)
⇒(
0 11 0
)d) f : R3 −→ R2 dada por f(x, y, z) = (y, z)
f(1, 0, 0) = (0, 0)f(0, 1, 0) = (1, 0)f(0, 0, 1) = (0, 1)
⇒(
0 1 00 0 1
)3. Calcular, para las funciones que sean aplicaciones lineales en el ejercicio 1, la matriz en las
bases canónicas.
1. a) f : R2 → R3 dada por f(x, y) = (x− y, 0, 2x+ 5y)
f(1, 0) = (1, 0, 2)f(0, 1) = (−1, 0, 5)
⇒
1 −10 02 5
1. c) f : P3[x]→ P3[x], dada por f [p(x)] = xp′(x)La base canónica de P3[x] es B = {1, x, x2, x3}. Por tanto
f(1) = 0f(x) = xf(x2) = 2x2
f(x3) = 3x3
⇒
0 0 0 00 1 0 00 0 2 00 0 0 3
1. e) f : R3 →M2×2(R) dada por
f(x, y, z) =
(x x− y0 y + z
)
f(1, 0, 0) =
(1 10 0
)= a
(1 00 0
)+ b
(0 10 0
)+ c
(0 01 0
)+ d
(0 00 1
)⇒ a = 1, b = 1,
c = 0, d = 0.
f(0, 1, 0) =
(0 −10 1
)f(0, 0, 1) =
(0 00 1
)La matriz asociada queda:
1 0 01 −1 00 0 00 1 1

42 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
4. Determinar el núcleo y la imagen de las aplicaciones lineales de los ejercicios 1 y 2.
1. a) f : R2 → R3 dada por f(x, y) = (x− y, 0, 2x+ 5y)Calculemos el núcleo: f(x, y, z) = (0, 0, 0)
x− y = 00 = 02x+ 5y = 0
⇒ x = 0; y = 0
Luego el núcleo está generado por el vector (0, 0), por lo que podemos decir que la aplicación esinyectiva.Estudiemos la imagen de f:
f(1, 0) = (1, 0, 2)f(0, 1) = (−1, 0, 5)
Por tanto, la imagen de f está generada por los vectores (1, 0, 2) y (−1, 0, 5). Como estos vectores sonlinealmente independientes una base de la imagen de f viene dada por el conjunto {(1, 0, 2), (−1, 0, 5)}.1. c) f : P3[x]→ P3[x], dada por f [p(x)] = xp′(x)Ker f :
f [p(x)] = 0⇒ xp′(x) = 0
Para los polinomios constantes, p(x) = C, la derivada es cero, p′(x) = 0, y entonces xp′(x) = 0. Portanto una base del núcleo de f es {1}.Im f :
Im[p(x)] = {1, x, x2, x3}pues la derivada de un polinomio de grado menor o igual que tres es un polinomio de grado menoro igual que dos, pero al estar multiplicada la derivada por x, este polinomio vuelve a ser de gradomenor o igual que tres.1. e) f : R3 →M2×2(R) dada por
f(x, y, z) =
(x x− y0 y + z
)Ker f :
f(x, y, z) =
(0 00 0
)⇒
x = 0x− y = 0y + z = 0
⇒ Ker f = {(0, 0, 0)}
Im f :
f(1, 0, 0) =
(1 10 0
)f(0, 1, 0) =
(0 10 −1
)f(0, 0, 1) =
(0 00 1
) ⇒ Im f =
{(1 10 0
),
(0 10 −1
),
(0 00 1
)}
2. a) f : R3 −→ R3 dada por f(x, y, z) = (z, x+ y,−z)Ker f :
z = 0x+ y = 0−z = 0
⇒ z = 0y = −x ⇒ Ker f = {(1,−1, 0)}
1.4. EJERCICIOS DE INICIACIÓN. APLICACIONES LINEALES 43
Im f :f(1, 0, 0) = (0, 1, 0)f(0, 1, 0) = (0, 1, 0)f(0, 0, 1) = (1, 0,−1)
⇒ Im f = {(0, 1, 0), (1, 0,−1)}
2. b) f : R3 −→ R2 dada por f(x, y, z) = (x+ y, 0)Ker f :
f(x, y, z) = (0, 0)⇒ x+ y = 0⇒ y = −x⇒ Ker f = {(1,−1, 0), (0, 0, 1)}
Im f :f(1, 0, 0) = (1, 0)f(0, 1, 0) = (1, 0)f(0, 0, 1) = (0, 0)
⇒ Im f = {(1, 0)}
2. c) f : R2 −→ R2 dada por f(x, y) = (y, x)Ker f :
y = 0x = 0
⇒ Ker f = {(0, 0)}
Im f :f(1, 0) = (0, 1)f(0, 1) = (1, 0)
⇒ Im f = {(1, 0), (0, 1)}
2. d) f : R3 −→ R2 dada por f(x, y, z) = (y, z)Ker f :
y = 0z = 0
⇒ Ker f = {(0, 0, 0), (1, 0, 0)}
Im f :f(1, 0, 0) = (0, 0)f(0, 1, 0) = (1, 0)f(0, 0, 1) = (0, 1)
⇒ Im f = {(1, 0), (0, 1)}
5. De una función f : R3 → R2 sabemos:
• f(1,−1, 0) = (2, 1).
• f(0,−1, 2) = (1, 1).
• f(3, 0, 1) = (0, 3).
Se pide:a) Calcula f(4,−2, 3).b) ¿Está bien definida la función, es decir, podemos calcular la imagen de cualquier vector deR3?c) Si consideramos la matriz que tiene las tres imágenes en fila, es decir,2 1
1 10 3

44 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
¿A qué bases se refiere la matriz de esta aplicación?d) Determina la matriz en las bases canónicas.e) Estudia si es inyectiva y/o sobreyectiva.
a) Vamos a resolver este apartado de varias formas distintas. La primera es haciendo un cambiode base. Si tomamos la matriz asociada a f respecto de la base B = {(1,−1, 0), (0,−1, 2), (3, 0, 1)}en el espacio vectorial origen y la base canónica en el espacio vectorial de llegada, obtenemos
MBC(f) =
(2 1 01 1 3
)Si tenemos en cuenta la relación existente entre matrices asociadas a una aplicación lineal y utilizandoel esquema
R3 −→ R3 f−→ R2
C 1a B 2a C
se tiene que la matriz asociada a f respecto de la base canónica es MC(f) = MBC(f)PCB. Tenemosque PBC es: 1 0 3
−1 −1 00 2 1
Calculamos su inversa:
|PCB| =
∣∣∣∣∣∣1 0 3−1 −1 00 2 1
∣∣∣∣∣∣ = −1− 6 = −7 6= 0; Adj(PCB) =
−1 1 −26 1 −23 −3 −1
;
Adj(PCB)t =
−1 6 31 1 −3−2 −2 −1
;P−1BC =Adj(PCB)t
|PCB|=
1
7
1 −6 −3−1 −1 32 2 1
Calculamos ahora la matriz MC(f):
MC(f) =1
7
(2 1 01 1 3
) 1 −6 −3−1 −1 32 2 1
=1
7
(1 −13 −36 −1 3
)
Ahora calculamos f(4,−2, 3):
1
7
(1 −13 −36 −1 3
) 4−23
=1
7
(2135
)=
(35
)
Por tanto, f(4,−2, 3) = (3, 5).Ahora lo resolveremos calculando las coordenadas del vector (4,−2, 3) en la base B para poder

1.4. EJERCICIOS DE INICIACIÓN. APLICACIONES LINEALES 45
utilizar directamente la matriz MBC(f). Tenemos que
(4,−2, 3) = α(1,−1, 0) + β(0,−1, 2) + γ(3, 0, 1)⇒
4 = α + 3γ−2 = −α− β3 = 2β + γ
⇒
⇒
1 0 3 4−1 −1 0 −20 2 1 3
F2+F1−→
1 0 3 40 −1 3 20 2 1 3
−→F3+2F2
1 0 3 40 −1 3 20 0 7 7
⇒⇒
4 = α + 3γ2 = −β + 3γ7 = 7γ
⇒γ = 1
β = 3γ − 2 = 1 = β
α = 4− 3γ = 1 = α
Por tanto, las coordenadas del vector (4,−2, 3) en la base B son (1, 1, 1) y ahora podemos calcularsu imagen. (
2 1 01 1 3
)111
=
(35
)Otra forma de resolverlo es calculando la matriz MC(f) directamente. Tenemos que
(a b cd e f
) 1−10
=
(21
)⇒{a− b = 2d− e = 1
(a b cd e f
) 0−12
=
(11
)⇒{−b+ 2c = 1−e+ 2f = 1
(a b cd e f
)301
=
(03
)⇒{
3a+ c = 03d+ f = 3
y entonces podemos formar los sistemasa− b = 2−b+ 2c = 13a+ c = 0
d− e = 1−e+ 2f = 13d+ f = 3
Resolvemos el primer sistema:
a = 2 + b; b = 2c− 1; 3(2 + b) + c = 0⇒ 6 + 3b+ 2c = 0⇒ 6 + 3(2c− 1) + c = 0⇒
⇒ 3 + 7c = 0⇒ c = −3
7; b = −6
7− 1 = −13
7= b ; a = 2− 13
7=
1
7= a
Resolvemos el segundo sistema:
d = e+ 1; e = 2f − 1; 3(e+ 1) + f = 3⇒ 3e+ 3 + f = 3⇒ 3(2f − 1) + f = 0⇒
⇒ 7f − 3 = 0⇒ f =3
7; e =
6
7− 1 =
1
7= e ; d = −1
7+ 1 =
6
7= d

46 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
Y llegamos a que la matriz MC(f) es(17−13
7−3
767−1
737
)=
1
7
(1 −13 −36 −1 3
)que es la misma a la que llegamos haciendo el cambio de base.El último método es el más sencillo. Teniendo en cuenta que la aplicación es lineal podemos hacer:
f(4,−2, 3) = αf(1,−1, 0) + βf(0,−1, 2) + γ(3, 0, 1)
donde claramente podemos ver que en este caso α = 1, β = 1, γ = 1. Si no lo viesemos directamentepodríamos resolver el sistema
4 = α + 3γ−2 = −α− β3 = 2β + γ
que ya resolvimos anteriormente. Entonces tenemos que
f(4,−2, 3) = f(1,−1, 0) + f(0,−1, 2) + f(3, 0, 1) = (2, 1) + (1, 1) + (0, 3) = (3, 5)
b)Para ver si podemos calcular la imagen de cualquier vector de R3 comprobamos que la dimensiónde la base B es 3: ∣∣∣∣∣∣
1 0 3−1 −1 00 2 1
∣∣∣∣∣∣ = −1− 6 = −7 6= 0
Entonces, como los vectores de la base son linealmente independientes podemos calcular la imagende cualquier vector de R3.c) Se refiere a la base canónica de R2.d)
MC(f) =1
7
(1 −13 −36 −1 3
)e) Tal como vimos en el ejemplo 22, tenemos que calcular primero el rango de una matriz de laaplicación como por ejemplo el de la MC(f):
rangMC(f) = rang
(17−13
7−3
767−1
737
)= 2 ya que
∣∣∣∣17 −137
67−1
7
∣∣∣∣ = − 1
49+
78
49=
77
496= 0
Ahora vemos si el rango es igual a la dimensión del espacio inicial. Como rang(f) = 2 6= rangR3 =3 la aplicación lineal no es inyectiva. Y ahora tenemos que comprobar que la dimensión del espaciofinal coincide con ese rango. Como rang(f) = rangR2 = 2 la aplicación lineal es sobreyectiva.
6. Consideremos el endomorfismo deR3 dado por f(x1, x2, x3) = (x1 + x2 + x3, x1 + x2 − x3, x3).Determina:a) ker(f)b) Im(f)c) f(V ) con V = {(x, y, z) ∈ R3 : x+ y + z = 0} d) La matriz en la base canónica. e) Ma-triz en la baseB = {(1, 1, 0), (1, 0, 1), (0, 1, 1)}. f) Relación entre ambas matrices.
1.4. EJERCICIOS DE INICIACIÓN. APLICACIONES LINEALES 47
a) NúcleoPara que (x1, x2, x3) ∈ Ker(f), se tiene que cumplir que (y1, y2, y3) = (0, 0, 0), entonces:
x1 + x2 + x3 = 0x1 + x2 − x3 = 0x3 = 0
⇒{x2 = −x1x3 = 0
⇒
x1 = αx2 = −αx3 = 0
Por lo tanto el núcleo de f está generado por el vector (1,−1, 0).b) ImagenUn elemento genérico de la imagen es:
(y1, y2, y3) = (x1 + x2)(1, 1, 0) + x3(1,−1, 1)
siendo (1, 1, 0) y (1,−1, 1) dos vectores linealmente independientes y por lo tanto base de la Im(f).Otra forma de hallarla es calcular la imagen de los vectores de la base que nos dará un sistemagenerador de Im(f)
f(1, 0, 0) = (1, 1, 0)
f(0, 1, 0) = (1, 1, 0)
f(0, 0, 1) = (1,−1, 1)
Si nos quedamos con los vectores linealmente independientes, tendremos la base buscada.c) f(V )La imagen de V vendrá dada por:
f(x, y, z) = (0, x+ y − z, z) = (0, 2(x+ y),−(x+ y)) = (x+ y)(0, 2,−1)
luego f(V ) vendrá generada por el vector (0, 2,−1)Otra forma será calcular una base del subespacio V y aplicar el Teorema 11,
x+ y + z = 0⇔ z = −x− y ⇔
x = αy = βz = −α− β
Por lo cual, aplicando f a una base de V tenemos que:
f(1, 0,−1) = (0, 2,−1)
f(0, 1,−1) = (0, 2,−1)
sistema generador de la Im(V ), siendo B = {(0, 2,−1)} una base.d) La matriz de f en la base canónica es
MC(f) =
1 1 11 1 −10 0 1
e) La matriz en la base B es la que tiene como columnas las coordenadas respecto de la base B de laimagen de los vectores de esa misma base B.
f(1, 1, 0) = (2, 2, 0) = α(1, 1, 0) + β(1, 0, 1) + γ(0, 1, 1)⇒
2 = α + β2 = α + γ0 = β + γ
⇒ α = 2− β;
2 = 2− β + γ ⇒ γ − β = 0γ + β = 0
⇒ γ = 0 ; β = 0 ; α = 2 ; f(1, 1, 0) = (2, 0, 0)B

48 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
f(1, 0, 1) = (2, 0, 1)
2 = α + β0 = α + γ ⇒ α = −γ1 = β + γ
⇒{
2 = β − γ1 = β + γ
⇒ 3 = 2β ⇒ β =3
2;
α = 2− 3
2=
4− 3
2=
1
2= α ; γ = 1− 3
2= −1
2= γ ; f(1, 0, 1) =
(1
2,3
2,−1
2
)B
f(0, 1, 1) = (2, 0, 1) =
(1
2,3
2,−1
2
)B
Entonces la matriz es
MB(f) =
2 12
12
0 32
32
0 −12−1
2
=1
2
4 1 10 3 30 −1 −1
f) Teniendo en cuenta el esquema
R3 −→ R3 f−→ R3 −→ R3
B 1a C 2a C 3a B
tenemos que la relación entre ambas matrices es:
MB(f) = PCBMC(f)PBC
Comprobamos que obtenemos la misma matriz que en el apartado anterior. La matriz PBC es
PBC =
1 1 01 0 10 1 1
Calculamos su inversa:
|PBC | =
∣∣∣∣∣∣1 1 01 0 10 1 1
∣∣∣∣∣∣ = −1− 1 = −2 6= 0; Adj(PBC) =
−1 −1 1−1 1 −11 −1 −1
;
Adj(PBC)t =
−1 −1 1−1 1 −11 −1 −1
; PCB = P−1BC =Adj(PCB)t
|PBC |=
1
2
1 1 −11 −1 1−1 1 1
Calculamos ahora MB(f):
1
2
1 1 −11 −1 1−1 1 1
1 1 11 1 −10 0 1
1 1 01 0 10 1 1
=1
2
2 2 −10 0 30 0 −1
1 1 01 0 10 1 1
=1
2
4 1 10 3 30 −1 −1

1.5. EJERCICIOS DEL TEMA 1 49
1.5. Ejercicios del tema 1
1. Consideremos enR4 los subespacios vectoriales F = 〈a, b, c〉 yG = 〈d, e〉 con a == (1, 2, 3, 4), b = (2, 2, 2, 6), c = (0, 2, 4, 4), d = (1, 0,−1, 2) y e = (2, 3, 0, 1). Determi-ne las dimensiones y una base de los subespacios vectoriales: F ,G, F ∩G, F +G y F ⊕G.
La dimensión de F la calculamos hallando el rango de la matriz1 2 3 42 2 2 60 2 4 4
;
∣∣∣∣∣∣1 2 32 2 20 2 4
∣∣∣∣∣∣ = 8 + 12− 16− 4 = 0;
∣∣∣∣∣∣1 2 42 2 60 2 4
∣∣∣∣∣∣ = 8 + 16− 16− 12 = −4 6= 0
Por tanto, dim(F ) = 3 y entonces el conjunto {a, b, d} es una base de f . Calculamos ahora la dimen-sión de G. La matriz (
1 0 −1 22 3 0 1
)formada por los vectores d y e tiene rango 2 como podemos ver a ojo, ya que por ejemplo
∣∣∣∣1 02 3
∣∣∣∣ =
3 6= 0, y entonces dim(G) = 2. Por tanto, una base de G es {d, e}.Sea x ∈ F ∩ G, entonces, x = αa + βb + γc = α(1, 2, 3, 4) + β(2, 2, 2, 6) + γ(0, 2, 4, 4) = (α +2β, 2α + 2β + 2γ, 3α + 2β + 4γ, 4α + 6β + 4γ) y x = md+ ne = m(1, 0,−1, 2) + n(2, 3, 0, 1) =(m+ 2n, 3n,−m, 2m+ n). Resolvemos el sistema:
α + 2β = m+ 2n2α + 2β + 2γ = 3n3α + 2β + 4γ = −m4α + 6β + 4γ = 2m+ n
⇒
α + 2β −m− 2n = 02α + 2β + 2γ − 3n = 03α + 2β + 4γ +m = 04α + 6β + 4γ − 2m− n = 0
⇒
1 2 0 −1 −22 2 2 0 −33 2 4 1 04 6 4 −2 −1
F2−2F1−→F3−3F1F4−4F1
1 2 0 −1 −20 −2 2 2 10 −4 4 4 60 −2 4 2 7
−→F3−2F2F4−F2
1 2 0 −1 −20 −2 2 2 10 0 0 0 40 0 2 0 6
⇒4n = 0⇒ n = 0
2γ + 6n = 0⇒ γ = 0
−2β + 2γ + 2m+ n = 0⇒⇒ 2β = 2m⇒ β = m
α + 2β −m− 2n = 0⇒⇒ α = −m
Sustituyendo estos valores en x = (α + 2β, 2α + 2β + 2γ, 3α + 2β + 4γ, 4α + 6β + 4γ) tenemos:x = (−m+2m,−2m+2m,−3m+2m,−4m+6m) = (m, 0,−m, 2m). Igualmente si los sustituimosen x = (m + 2n, 3n,−m, 2m + n) obtenemos que x = (m, 0,−m, 2m) siendo {(1, 0,−1, 2)} unabase de F ∩G y dimF ∩G = 1.Sabemos que dim(F +G) = dimF + dimG− dim(F ∩G). Entonces tenemos que dim(F +G) =3 + 2− 1 = 4. Una base de F +G estará formada, por tanto, por 4 vectores, por ejemplo, los vectores{a, b, c} más un vector de G de forma que los 4 sean linealmente independientes. Como∣∣∣∣∣∣∣∣
1 2 3 42 2 2 60 2 4 41 0 −1 2
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣1 2 3 40 −2 −4 −20 2 4 40 −2 −4 −2
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣−2 −4 −22 4 4−2 −4 −2
∣∣∣∣∣∣ = 16 + 32 + 16− 16− 16− 32 = 0

50 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
entonces d depende linealmente de los vectores a, b y c. Probamos con el vector e:∣∣∣∣∣∣∣∣1 2 3 42 2 2 60 2 4 42 3 0 1
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣1 2 3 40 −2 −4 −20 2 4 40 −1 −6 −7
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣2 2 62 4 4−1 −6 −7
∣∣∣∣∣∣ =��56 + 16 + 24− 8− 48−��56 = −24 6= 0
Una base de F +G estará formada por B = {a, b, c, e}.Anteriormente vimos que F ∩G 6= {0}, por tanto la suma de F con G no es directa.
2. Dado el endomorfismo deR3 definido por (x1, x2, x3) 7→ (y1, y2, y3) donde y1 = x1++x2 + x3, y2 = x1 + x2 − x3 e y3 = x3 con respecto a la base canónica, calcule1. Ker(f).2. Im(f).3. f(V ) con V = {(x, y, z) ∈ R3 : x+ y + z = 0}.
Este ejercicio es igual al ejercicio 6 de iniciación de aplicaciones lineales.
3. SeaV el espacio vectorial de los polinomios con coeficientes reales, en la indeterminada x, degrado menor o igual a tres. Demuestre que los polinomios p1(x) := 1− x, p2(x) := x2 + x3,p3(x) := 1 + x2, p4(x) := x+ x3, constituyen una baseB de V . Exprese el polinomio 3++3x2 − 4x3 en dicha base.
Tenemos el conjunto {(1,−1, 0, 0), (0, 0, 1, 1), (1, 0, 1, 0), (0, 1, 0, 1)}. Para ver si sus vectores sonlinealmente independientes calculamos el rango de la matriz que forma:∣∣∣∣∣∣∣∣
1 0 1 0−1 0 0 10 1 1 00 1 0 1
∣∣∣∣∣∣∣∣calculando los menores de la primera fila tenemos
1 ·
∣∣∣∣∣∣0 0 11 1 01 0 1
∣∣∣∣∣∣+ 1 ·
∣∣∣∣∣∣−1 0 10 1 00 1 1
∣∣∣∣∣∣ = −1− 1 = −2 6= 0
Ahora que sabemos que ese conjunto es una base, a la que llamaremos B, buscamos las coordenadasdel vector (3, 0, 3,−4) en dicha base:
3, 0, 3,−4) = α(1,−1, 0, 0) + β(0, 0, 1, 1) + γ(1, 0, 1, 0) + µ(0, 1, 0, 1)⇒
α + γ = 3−α + µ = 0β + γ = 3β + µ = −4
⇒
⇒
α = 3− γγ = 3− ββ = −4− µµ = α
⇒β = −4− αγ = 3 + 4 + α = 7 + α
α = 3− 7− α⇒ 2α = −4⇒ α = −2⇒ γ = 5 ; β = −2 ; µ = −2
Por tanto, las coordenadas del polinomio 3 + 3x2− 4x3 expresado en la base B tiene las coordenadas(−2,−2, 5,−2)B.

1.5. EJERCICIOS DEL TEMA 1 51
4. Sea E un espacio vectorial de dimensión 2 y tres bases del mismoB1 = {v1, v2},B2 == {w1, w2}, B3 = {u1, u2}, relacionadas en la forma v1 = u1 − u2, v2 = u2, w1 = 2u1,w2 = u1 − u2. Calcule las coordenadas de un vector ~v en la base B2, sabiendo que sus coor-denadas en la baseB1 son (2, 3)B1 .
Si las coordenadas de ~v en la base B1 son (2, 3)B1 es porque ~v = 2v1 + 3v2. Entonces
~v = 2v1 + 3v2 = 2(u1 − u2) + 3u2 = 2u1 + u2
luego las coordenadas de ~v en la base B3 son (2, 1)B3 . Invirtiendo la relación que existen entre losvectores de la base B2 y B3 tenemos
~v = 2u1 + u2 = 2
(1
2
)w1 +
(1
2w1 − w2
)=
3
2w1 − w2
y entonces las coordenadas de ~v en la base B2 son (32,−1)B2 .
Resolvamos el ejercicio matricialmente. Denotemos por PB1B3 y PB2B3 a las matrices de cambio debase de B1 a B3 y de B2 a B3, respectivamente, que nos proporciona el enunciado. Estas matricesson:
PB1B3 =
(1 0−1 1
); PB2B3 =
(2 10 −1
)Como se nos pide calcular las coordenadas de ~v en la base B2 a partir de sus coordenadas en la baseB1, usaremos la matriz PB1B2 . Seguimos el esquema
R2 −→ R2 −→ R2
B1 1a B3 2a B2
para tenerPB1B2 = PB3B2PB1B2 = P−1B2B3
PB1B3
Calculamos la matriz inversa de PB2B3:∣∣∣∣2 10 −1
∣∣∣∣ = −2 6= 0; Adj(PB2B3) =
(−1 0−1 2
); Adj(PB2B3)
t =
(−1 −10 2
);P−1B2B3
=1
2
(1 10 −2
)Ahora calculamos la matriz PB1B2:
PB1B2 =1
2
(1 10 −2
)(1 0−1 1
)=
1
2
(0 12 −2
)De este modo
1
2
(0 12 −2
)(23
)=
1
2
(3−2
)=
(32
−1
)5. Sea f el endomorfismo de R4(R) definido de la forma:
• El núcleo de f es el subespacio vectorial de ecuaciones x+ y + z = 0 y t = 0.
• Los vectores (1, 1, 1, 0) y (0, 0, 0, 1) se transforman en sí mismos.
Se pide:

52 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
1. La matriz de f respecto a la base canónica.
2. Dado el subespacio vectorial de ecuaciones x+ y + z − t = 0, t = 0 y x− y + 2t = 0,halle una base de su imagen por f .
1. Tenemos los vectores (1, 1, 1, 0) y (0, 0, 0, 1), y queremos calcular dos vectores más de nuestroendomorfismo, que sean linealmente independientes, para tener una base del mismo. Nos dan lasecuaciones cartesianas del núcleo, por tanto, calculamos las ecuaciones paramétricas para obteneruna base del mismo:
x = αy = βz = −α− βt = 0
⇒ {(1, 0,−1, 0), (0, 1,−1, 0)}
Veamos entonces que el conjunto {(1, 0,−1, 0), (0, 1,−1, 0), (1, 1, 1, 0), (0, 0, 0, 1)} es linealmenteindependiente y, por tanto, es una base de nuestro endomorfismo:∣∣∣∣∣∣∣∣
1 0 −1 00 1 −1 01 1 1 00 0 0 1
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣1 0 −10 1 −11 1 1
∣∣∣∣∣∣ = 1 + 1 + 1 = 3 6= 0
El conjunto es por tanto una base a la que llamaremosB. Calculamos entonces la matriz de f respectoa la baseB. Los vectores (1, 0,−1, 0) y (0, 1,−1, 0) tienen como imagen al vector nulo por perteneceral núcleo de f . Los (1, 1, 1, 0) y (0, 0, 0, 1) al transformarse en sí mismos tienen como coordenadasen la base B a (0, 0, 1, 0)B y (0, 0, 0, 1)B, respectivamente. La matriz de f respecto a la base B quedaentonces:
MB(f) =
0 0 0 00 0 0 00 0 1 00 0 0 1
Para hallar la matriz de f respecto a la base canónica C, tendremos en cuenta el siguiente esquema:
R4 −→ R4 f−→ R4 −→ R4
C 1a B 2a B 3a C
La matriz de paso de la base B a la base canónica C viene dada por:
PBC =
1 0 1 00 1 1 0−1 −1 1 00 0 0 1
Entonces la matriz de f en la base canónica viene dada por:
MC(f) = PBCMB(f)PCB = PBCMB(f)P−1BC
1.5. EJERCICIOS DEL TEMA 1 53
Calculamos la matriz inversa de PBC utilizando el método de Gauss:1 0 1 0 1 0 0 00 1 1 0 0 1 0 0−1 −1 1 0 0 0 1 00 0 0 1 0 0 0 1
F3+F1−→
1 0 1 0 1 0 0 00 1 1 0 0 1 0 00 −1 2 0 1 0 1 00 0 0 1 0 0 0 1
F3+F2−→
1 0 1 0 1 0 0 00 1 1 0 0 1 0 00 0 3 0 1 1 1 00 0 0 1 0 0 0 1
13F3−→
F1− 13F3
F2− 13F3
1 0 0 0 2/3 −1/3 −1/3 00 1 0 0 −1/3 2/3 −1/3 00 0 1 0 1/3 1/3 1/3 00 0 0 1 0 0 0 1
Calculamos ahora MC(f):
MC(f) =1
3
1 0 1 00 1 1 0−1 −1 1 00 0 0 1
0 0 0 00 0 0 00 0 1 00 0 0 1
2 −1 −1 0−1 2 −1 01 1 1 00 0 0 3
=1
3
0 0 1 00 0 1 00 0 1 00 0 0 1
2 −1 −1 0−1 2 −1 01 1 1 00 0 0 3
=1
3
1 1 1 01 1 1 01 1 1 00 0 0 3
=
1/3 1/3 1/3 01/3 1/3 1/3 01/3 1/3 1/3 00 0 0 1
2. Hallamos las ecuaciones paramétricas del subespacio vectorial:
x+ y + z − t = 0t = 0x− y + 2t = 0
⇒{x+ y + z = 0x− y = 0 ⇒
x = αy = αz = −2αt = 0
Una base del subespacio es entonces {(1, 1,−2, 0)}. Calculamos su imagen por f :1/3 1/3 1/3 01/3 1/3 1/3 01/3 1/3 1/3 00 0 0 1
11−20
=
0000
También podríamos haber visto que el vector (1, 1,−2, 0) es combinación lineal de los vectores queforman la base del núcleo, ya que (1, 1,−2, 0) = (1, 0,−1, 0) + (0, 1,−1, 0), y por tanto, perteneceal núcleo, por lo que la base de la imagen por f del subespacio vectorial es el vector nulo.
6. Sea f : R3 → R2 la aplicación lineal dada por
f(x, y, z) = (x+ 2y − z, 2x− y + 3z), ∀(x, y, z) ∈ R3,
y sean B1 = {(1, 0, 1), (1, 1, 0), (0, 1, 1)} y B2 = {(1, 3), (2,−1)} bases de R3 y R2 res-pectivamente.a) Determine la matriz de f en las bases canónicas.b) Determine la matriz de f en las bases B1 y B2.

54 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
a) Para calcular la matriz de f en las bases canónicas simplemente hacemos:
f(1, 0, 0) = (1, 2)f(0, 1, 0) = (2,−1)f(0, 0, 1) = (−1, 3)
⇒MC(f) =
(1 2 −12 −1 3
)
b) Lo resolvemos primero aplicando la definición de aplicación lineal:
f(1, 0, 1) = (0, 5) = α(1, 3) + β(2,−1)⇒
0 = α + 2β ⇒ α = −2β
5 = 3α− β ⇒ 5 = −6β − β ⇒ β = −5
7
⇒
⇒ α =10
7
f(1, 1, 0) = (3, 1)⇒{
3 = α + 2β ⇒ α = 3− 2β1 = 3α− β ⇒ 1 = 3(3− 2β)− β ⇒ 1 = 9− 7β ⇒
⇒ 7β = 8⇒ β =8
7; α = 3− 16
7=
21− 16
7=
5
7= α
f(0, 1, 1) = (1, 2)⇒{
1 = α + 2β2 = 3α− β ⇒ β = 3α− 2
⇒ 1 = α + 6α− 4⇒ 7α = 5⇒ α =5
7
β =15
7− 14
7=
1
7= β
Entonces tenemos que
f(1, 0, 1) =
(10
7,−5
7
)B2
, f(1, 1, 0) =
(5
7,8
7
)B2
, f(0, 1, 1) =
(5
7,1
7
)B2
y, por tanto, la matriz de f en las bases B1 y B2 es:
MB1B2(f) =
(10/7 5/7 5/7−5/7 8/7 1/7
)Ahora lo resolvemos matricialmente. Teniendo en cuenta el esquema
R3 −→ R3 f−→ R2 −→ R2
B1 1a C1 2a C2 3a B2
tenemos que la matriz MB1B2(f) es:
MB1B2(f) = PC2B2MC1C2(f)PB1C1 = P−1B2C2MC1C2(f)PB1C1
Las matrices PB1C1 y PB2C2 son:
PB1C1 =
1 1 00 1 11 0 1
; PB2C2 =
(1 23 −1
)

1.5. EJERCICIOS DEL TEMA 1 55
Calculamos la matriz inversa de PB2C2 :
PB2C2 | =∣∣∣∣1 23 −1
∣∣∣∣ = −1− 6 = −7 6= 0; Adj(PB2C2) =
(−1 −3−2 −1
);
Adj(PB2C2)t =
(−1 −2−3 −1
); P−1B2C2
=1
7
(1 23 −1
)Calculamos ahora la matriz MB1B2(f):
MB1B2(f) =1
7
(1 23 −1
)(1 2 −12 −1 3
)1 1 00 1 11 0 1
=1
7
(5 0 51 7 −6
)1 1 00 1 11 0 1
=
1
7
(10 5 5−5 8 1
)Y, por tanto, la matriz de f en las bases B1 y B2 es:
MB1B2(f) =
(10/7 5/7 5/7−5/7 8/7 1/7
)7. Considere los subespacios vectoriales U = 〈((1, 1, 1)〉 y W = {(x, y, z) ∈ R3 : x+ y++z = 0} en R3.a) Calcule la matriz de una aplicación lineal f : R3 → R3 tal que ker(f) = U e Im(f) = W .b) Encuentre subespacios U ′ yW ′ de R3 tales que U ⊕ U ′ = R3 yW ⊕W ′ = R3.
Calculamos las ecuaciones paramétricas de W y a partir de estas una base:x = αy = βz = −α− β
⇒ B(W ) = 〈(1, 0,−1), (0, 1,−1)〉
Como los vectores (1, 0,−1) y (0, 1,−1) pertenecen a la Im f la matriz de la aplicación en la basecanónica es: 1 0 a
0 1 b−1 −1 c
Si el vector (1, 1, 1) genera el núcleo, entonces 1 0 a
0 1 b−1 −1 c
111
=
000
⇒
1 + a = 0⇒ a = −11 + b = 0⇒ b = −1−1− 1 + c = 0⇒ c = 2
Por tanto la matriz de f en la base canónica es:
MC(f) =
1 0 −10 1 −1−1 −1 2

56 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
b)Para encontrar los subespacios que cumplan que U ⊕ U ′ = R3 y W ⊕W ′ = R3 debemos teneren cuenta dos cosas, la primera es que la dimensión del espacio vectorial suma debe ser 3, ya quedim(R3) = 3. Y la otra es que al ser suma directa la dimensión de la intersección de los subespaciosque estamos sumando debe ser igual a cero. Por tanto, el apartado consiste en hallar una base paraU ′ y W ′ cuyos vectores sean linealmente independientes respecto a U y W respectivamente. Ya quedim(R3) = 3, debemos tener en cuenta que son dos vectores que sean linealmente independientescon la base de U , y uno que sea linealmente independiente con la base de W .Ya que dim(U ⊕U ′) = dim(U) + dim(U ′)−dim(U ∩U ′)⇒ 3 = 1 + dim(U ′)− 0⇒ dim(U ′) = 2.dim(W ⊕W ′) = dim(W ) + dim(W ′)− dim(W ∩W ′)⇒ 3 = 2 + dim(W ′)− 0⇒ dim(W ′) = 1.Por ejemplo para U ′ escogemos arbitrariamente los vectores (1, 0, 0), (0, 1, 0), aunque los escogemosfijandonos en que deben ser linealmente independientes consigo mismo y con los de la base de U . Sepuede comprobar que son linealmente independientes con los vectores de U mediante el determinan-
te:
∣∣∣∣∣∣1 1 11 0 00 1 0
∣∣∣∣∣∣ = 1 6= 0 por lo que U ′ = 〈(1, 0, 0), (0, 1, 0)〉.
Igualmente para W ′ escogemos el vector (0, 0, 1) que es linealmente independiente con los vectores
de W . Lo comprobamos:
∣∣∣∣∣∣1 0 −10 1 −10 0 1
∣∣∣∣∣∣ = 1 6= 0 por lo que W ′ = 〈(0, 0, 1)〉.
8. En el espacio vectorialM2(R) considere el conjunto
U = {A ∈M2(R) : A+At = 0}.
Demuestre que se trata de un subespacio vectorial de M(R) y determine una base y su dimen-sión.
Para comprobar que U es subespacio vectorial cogemos A/A + At = 0 y B/B + Bt = 0 y ha-cemos:
(λA+ µB) + (λA+ µB)t = (λA+ µB) + (λAt + µBt) = λ(A+ At) + µ(B +Bt)
Como este último término también es igual a cero, el subconjunto es un subespacio vectorial deM(R)Veamos como es un elemento típico de este subconjunto:
(a bc d
)+
(a cb d
)=
(0 00 0
)⇒
a+ a = 0⇒ a = 0b+ c = 0⇒ b = −cd+ d = 0⇒ d = 0
Entonces un elemento típico de U es ~u =
(0 x−x 0
). Y una base del subespacio es
{(0 1−1 0
)},
cuya dimensión es uno.
9. Sea f un endomorfismo de un espacio vectorial V sobre un cuerpo de característica distintade dos que verifica f ◦ f = IV , donde IV es la identidad en V .
1. Pruebe que f es un automorfismo.

1.5. EJERCICIOS DEL TEMA 1 57
2. Se definen los conjuntos
U := {x ∈ V : f(x) = x} yW := {x ∈ V : f(x) = −x}
Pruebe que son subespacios vectoriales de V .
3. Demuestre que V = U ⊕W .
1. Para ver si es inyectiva tenemos que ver que si f(x) = f(y)⇒ x = y. f(x) = f(y)⇒ f(f(x)) =f(f(y))⇒ x = y. Por tanto la aplicación es inyectiva.Para ver si es sobreyectiva tenemos que ver que ∃x/f(x) = y∀y. Si tomamos x = f(y) tenemos quef(x) = f(f(y)) = y. Por tanto la aplicación es sobreyectiva. Como es inyectiva y sobreyectiva es unautomorfismo o isomorfismo.2. U = {x/f(x) = x}. Tomamos x/f(x) = x e y/f(y) = y:
f(λx+ µy) = λf(x) + µf(y) = λx+ µy
W = {x/f(x) = −x}. Tomamos x/f(x) = −x e y/f(y) = −y:
f(λx+ µy) = λf(x) + µf(y) = −(λx+ µy)
3. Tomamos x ∈ V . x = a+ b, f(a) = a y f(b) = −b. x = x+f(x)2
+ x−f(x)2
.
f(x+ f(x)
2) =
f(x) + f(f(x))
2=x+ f(x)
2
f(x− f(x)
2) =
f(x)− x2
= −x− f(x)
2
Comprobamos que V = U ⊕W :
−x = f(x) = x⇒ x = 0
10. Sean S3(R) yA3(R) los conjuntos de matrices simétricas y antisimétricas 3× 3, respecti-vamente.
1. Pruebe que son subespacios vectoriales de M3(R). Obtenga una base de cada uno asícomo su dimensión.
2. Demuestre que S3(R)⊕A3(R) = M3(R).
3. Si f : S3(R)→ A3(R) es la aplicación lineal dada por
f
d a ba e cb c f
=
0 −a −ba 0 −cb c 0
halle la matriz de f respecto a las bases construidas en el primer apartado.

58 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
1.
λ
a e fe b gf g c
+ µ
a′ e′ f ′
e′ b′ g′
f ′ g′ c′
=
λa+ µa′ λe+ µe′ λf + µf ′
λe+ µe′ λb+ µb′ λg + µg′
λf + µf ′ λg + µg′ λc+ µc′
∈ S3(R)
λ
0 a b−a 0 c−b −c 0
+ µ
0 a′ b′
−a′ 0 c′
−b′ −c′ 0
=
0 λa+ µa′ λb+ µb′
−λa− µa′ 0 λc+ µc′
−λb− µb′ −λc− µc′ 0
∈ A3(R)
BS3(R) =
1 0 0
0 0 00 0 0
,
0 1 01 0 00 0 0
,
0 0 10 0 01 0 0
,
0 0 00 1 00 0 0
,
0 0 00 0 10 1 0
,
0 0 00 0 00 0 1
BA3(R) =
0 −1 0
1 0 00 0 0
,
0 0 −10 0 01 0 0
,
0 0 00 0 −10 1 0
2. dim(M3(R)) = 9, dim(S3(R)) = 6, dim(A3(R)) = 3.
dim(M3(R)) = dim(S3(R)) + dim(A3(R))
Entonces M3(R) = S3(R)⊕ A3(R), porque la intersección tiene que ser 0.3. Para no tener que escribir las matrices que conforman los elementos de las bases que vamosa utilizar muchas veces, denotamos las matrices como BS3(R) = {~v1, ~v2, ~v3, ~v4, ~v5, ~v6}, BA3(R) ={~w1, ~w2, ~w3}.
f(~v1) = 0~w1 + 0~w2 + 0~w3
f(~v2) = 1~w1 + 0~w2 + 0~w3
f(~v3) = 0~w1 + 1~w2 + 0~w3
f(~v4) = 0~w1 + 0~w2 + 0~w3
f(~v5) = 0~w1 + 0~w2 + 5~w3
f(~v6) = 0~w1 + 0~w2 + 0~w3
⇒
0 1 0 0 0 00 0 1 0 0 00 0 0 0 1 0

1.6. EJERCICIOS DE EXAMEN DEL TEMA 1 59
1.6. Ejercicios de examen del tema 1
1 (ABRIL 2008). Consideremos el espacio vectorial V = (Rn,+, ·). En qué caso U es unsubespacio vectorial de V ? (seleccione la respuesta correcta):a) U = {(x1, x2, . . . , xn) ∈ Rn :
∑ni=1 ixi = 0}.
b) U = {(x1, x2, . . . , xn) ∈ Rn : xi > 0, ∀i}.c) U = {(x1, x2, . . . , xn) ∈ Rn : max(xi) ≤ 1, ∀i}.d) U = {(x1, x2, . . . , xn) ∈ Rn :
∑ni=1 ixi = 1}.
a) U = {(x1, x2, . . . , xn) ∈ Rn :∑ni=1 ixi = 0}.
u = (x1, x2, . . . , xn) :∑n
i=1 ixi = 0, v = (y1, y2, . . . , yn) :∑n
i=1 iyi = 0.
λu+ µv = (λx1 + µy1, λx2 + µy2, . . . , λxn + µyn)n∑i=1
i(λxi + µyi) = 0
b) U = {(x1, x2, . . . , xn) ∈ Rn : xi > 0, ∀i}.Ponemos un contraejemplo. Si u = (1, 1, . . . , 1) xi > 0∀i. Pero si λ = −1: λu = (−1,−1, . . . ,−1)xi ≯ 0,∀i.c) U = {(x1, x2, . . . , xn) ∈ Rn : max(xi) ≤ 1, ∀i}.Ponemos un contraejemplo. Si u = (1, 1, . . . , 1) max(xi) ≤ 0∀i. Pero si λ = 2: λu = (2, 2, . . . , 2)max(xi) � 1,∀i.d) U = {(x1, x2, . . . , xn) ∈ Rn :
∑ni=1 ixi = 1}.
Ponemos un contraejemplo. Si u = (1, 0, . . . , 0)∑n
i=1 ixi = 1. Pero si λ = 2: λu = (2, 0, . . . , 0)∑ni=1 ixi 6= 1.
2 (ABRIL 2008). EnR3 se definen los subespacios vectorialesU = 〈((1, 1, 1)〉 yW = {(x, y, z) ∈ R3 : x++y + z = 0}.a) Calcule la matriz de una aplicación lineal f : R3 → R3 tal que ker(f) = U e Im(f) = W .
a) Está resuelto en el ejercicio 7 de la página 55.
3 (SEPTIEMBRE 2008). Sea f un endomorfismo de un espacio vectorial V sobre un cuerpode característica distinta de dos que verifica f ◦ f = IV , donde IV es la identidad en V .a) Pruebe que f es un automorfismo.b) Se definen los conjuntos
U := {x ∈ V : f(x) = x} yW := {x ∈ V : f(x) = −x}
Pruebe que son subespacios vectoriales de V .c) Demuestre que V = U ⊕W .
Este ejercicio está resuelto en el 9 de la página 56.
4 (SEPTIEMBRE 2009). Sea V = R4[t] el espacio vectorial de los polinomios reales de gradomenor o igual que 4 en la indeterminada t. Considere el conjunto C = {t4, (t− 1)2t(t+ 1),(t− 1)t2(t+ 1), (t− 1)t(t+ 1)2}.

60 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
a) Encuentre un subconjuntoB ⊂ C que sea una base de 〈C〉.b) Determine las coordenadas de los polinomios de C con respecto a la base obtenida.c) ExtiendaB a una base de V .
(t− 1)2t(t+ 1) = (t2 − 2t+ 1)t(t+ 1) = t4 − 2t3 + t2 + t3 − 2t2 + t = t4 − t3 − t2 + t
(t− 1)t2(t+ 1) = (t− 1)(t3 + t2) = t4 − t3 + t3 − t2 = t4 − t2
(t− 1)t(t+ 1)2 = (t2 + 2t+ 1)(t2 − t) = t4 + 2t3 + t2 − t3 − 2t2 − t = t4 + t3 − t2 − t
a) El conjuntoC expresado con las coordenadas de los vectores respecto a la base canónica {1, t, t2, t3, t4}es:
C = {(0, 0, 0, 0, 1), (0, 1,−1,−1, 1), (0, 0,−1, 0, 1), (0,−1,−1, 1, 1)}0 0 0 0 10 1 −1 −1 10 0 −1 0 10 −1 −1 1 1
F4+F2−→
0 0 0 0 10 1 −1 −1 10 0 −1 0 10 0 −2 0 2
F4−2F3−→
0 0 0 0 10 1 −1 −1 10 0 −1 0 10 0 0 0 0
Por tanto, B = {t4, t4 − t3 − t2 + t, t4 − t2} es una base de 〈C〉.b)
(0, 0, 0, 0, 1) = 1(0, 0, 0, 0, 1) + 0(0, 1,−1,−1, 1) + 0(0, 0,−1, 0, 1)
(0, 1,−1,−1, 1) = 0(0, 0, 0, 0, 1) + 1(0, 1,−1,−1, 1) + 0(0, 0,−1, 0, 1)
(0, 0,−1, 0, 1) = 0(0, 0, 0, 0, 1) + 0(0, 1,−1,−1, 1) + 1(0, 0,−1, 0, 1)
(0,−1,−1, 1, 1) = a(0, 0, 0, 0, 1) + b(0, 1,−1,−1, 1) + c(0, 0,−1, 0, 1)
0 = 0
−1 = b
−1 = −b− c⇒ c = 2
1 = −b1 = a+ b+ c⇒ 1 = a− 1 + 2⇒ a = 0
Comprobamos que −(0, 1,−1,−1, 1) + 2(0, 0,−1, 0, 1) = (0,−1,−1, 1, 1). c)1 0 0 0 00 0 0 0 10 1 −1 −1 10 0 −1 0 10 0 0 1 0
B = {1, t4, t4 − t3 − t2 + t, t4 − t2, t3}
5 (SEPTIEMBRE 2010). Considere el espacio vectorialR2[t] con la base usualB = {1, t, t2}.a) Demuestre que el conjunto C = {t+ 1, t− 1, t2 + 2t} es una base de R2[t].b) DetermineQ inversible de modo que ξB[u] = ξC[u]Q.c) Demuestre que es lineal la aplicación T : R2[t] 7→ R2[t] dada por T (p(t)) := tp′(t) + p(t).Calcule la matriz de T en la baseB. ¿Es inyectiva? ¿y sobreyectiva?

1.6. EJERCICIOS DE EXAMEN DEL TEMA 1 61
a) Escribiendo las coordenadas de los vectores de la base C respecto de los de la base B tenemos:∣∣∣∣∣∣1 −1 01 1 20 0 1
∣∣∣∣∣∣ = 1 + 1 = 2 6= 0
b) Como trabajamos por columnas buscamos P tal que ξB[u] = PξC [u] siendo P = Qt de modo queξB[u] = ξC [u]Q. Para pasar de las coordenadas de un vector en la base C a las de la base B usamosla matriz PCB. Sabemos que PBC es: 1 −1 0
1 1 20 0 1
Adj(PBC) =
∣∣∣∣∣∣1 −1 01 1 0−2 −2 2
∣∣∣∣∣∣ ; Adj(PBC)t =
1 1 −2−1 1 −20 0 2
PCB =
1/2 1/2 −1−1/2 1/2 −1
0 0 1
Y entonces la matriz que nos piden es:
Q =
1/2 −1/2 01/2 1/2 0−1 −1 1
c)
λT (p) + µT (q) = λ(tp′ + p) + µ(tq′ + q)
T (λp+ µq)′ = t(λp+ µq)′ + (λp+ µq) = λtp′ + µtq′ + λp+ µq = λ(tp′ + p) + µ(tq′ + q)
Es aplicación lineal.T (1) = 1T (t) = 2tT (t2) = 3t2
⇒MB(f) =
1 0 00 2 00 0 3
Tiene que ser dim(R2[t]) = dim(ker(f)) + dim(Im(f)). dim(Im(f)) = rang(MB(f)) = 3 =dim(R2[t]). Por tanto la aplicación lineal es sobreyectiva. Y como dim(ker(f)) = dim(R2[t]) −dim(Im(f)) = 3− 3 = 0 también es inyectiva.
6 (ENERO 2011). Se considera el endomorfismo f en R3 dado por f(x, y, z) = (x+ z,−x+ y + αz, y − z).a) Determine la matriz de f en la baseB = {(1, 0, 1), (0, 1, 0), (0, 0,−1)}.b)Calcule el valor de α para el cuál, dim(ker(f)) = 1.c) Para dicho valor de α, calcule una base del núcleo y otra de la imagen de f .d) ¿Para qué valores de α es f un isomorfismo?

62 TEMA 1. ESPACIOS VECTORIALES Y APLICACIONES LINEALES
a)
f(1, 0, 1) = (2,−1 + α,−1) = a(1, 0, 1) + b(0, 1, 0) + c(0, 0,−1)⇒ a = 2, b = −1 + α, c = 3
f(0, 1, 0) = (0, 1, 1)⇒ a = 0, b = 1, c = −1
f(0, 0,−1) = (−1,−α, 1)⇒ a = −1, b = −α, c = −2
MB(f) =
2 0 −1−1 + α 1 −α
3 −1 −2
b) dim(R3) = dim(ker(f)) + dim(Im f)⇒ dim(Im f) = dim(R3)− dim(ker(f)) = 3− 1 = 2 =rang(MB(f))∣∣∣∣∣∣
2 0 −1−1 + α 1 −α
3 −1 −2
∣∣∣∣∣∣ = −4− 1 + α + 3− 2α = −α− 2 = 0⇒ α = −2
Para α = −2 dim(Im f) = 2 y, por tanto, dim(ker(f)) = 1.c) Usando la base canónica:
x+ z = 0−x+ y − 2z = 0y − z = 0
⇒{x+ z = 0y − z = 0
⇒
x = −αy = αz = α
⇒ ker(f) = {(−1, 1, 1)}
f(1, 0, 0) = (1,−1, 0)f(0, 1, 0) = (0, 1, 1)f(0, 0, 1) = (1,−2,−1)
⇒
∣∣∣∣∣∣1 −1 00 1 11 −2 −1
∣∣∣∣∣∣ = −1− 1 + 2 = 0 6= 0
Im f = {(1,−1, 0), (0, 1, 1)}.d) Para α 6= −2 f es un isomorfismo, ya que dim(Im f) = 3 y dim(ker(f)) = 0.
7 (SEPTIEMBRE 2011). Sea {u, v, w} un conjunto linealmente independiente en un espaciovectorial V (K), conK = R óC. Se definen los vectores x = αu+ (1− α)v, y = αv + (1−−α)w, z = αw + (1− α)u. Analice la independencia lineal del conjunto {x, y, z}.∣∣∣∣∣∣
α 1− α 00 α 1− α
1− α 0 α
∣∣∣∣∣∣ = α2 + (1− α)3 = α3 + (1− 2α + α2)(1− α) = α3 + 1− 2α + α2 − α+
+ 2α2 − α3 = 3α2 − 3α + 1 = 0
α =3±√
9− 12
6=
3±√−3
6=
1
2± i√
3
ParaK = R no hay valores de α que hagan que el conjunto sea linealmente dependiente. Sin embargo,en K = C, para α = 1
2± i√
3 el conjunto es linealmente dependiente y para el resto de valores de αes linealmente independiente.

Tema 2
Diagonalización de endomorfismosDefinición 1. Dado un espacio vectorial V sobre un cuerpo K diremos que el endomorfismo f :V → V es diagonalizable si existe una base de V tal que la representación de f en la base sea unamatriz diagonal D.
Definición 2. Sea V un espacio vectorial sobre un cuerpo K y f : V → V una aplicación lineal(endomorfismo). Diremos que un subespacio vectorial W de V es f -invariante si f(W ) ⊂ W .
Definición 3. Sea f : V → V un endomorfismo. Un vector ~v 6= ~0 de un espacio vectorial V sobre uncuerpo K se llama autovector o vector propio de un endomorfismo si ∃λ ∈ K tal que f(~v) = λ~v. Aeste valor λ ∈ K se le llama autovalor o valor propio del endomorfismo f asociado al autovector ~v.
Definición 4. Sea f : V → V un endomorfismo. Al conjunto Pλ = {~v ∈ V |f(~v) = λ~v} se le llamasubespacio propio del endomorfismo f asociado al autovalor λ.
Propiedades:
• Pλ es un subespacio vectorial de V , formado por los autovectores de f asociados a λ y por~0V .
• Si ~v es un autovector de f , ~v lleva asociado un único autovalor.
• Dada la aplición identidad I : V → V , se tiene Pλ = Ker(f − λIn).
• En dimensión finita
dim(Pλ) = dim(V )− dim(Im(f − λId)) = dim(V )− rang(f − λId)
2.1. Autovalores de una matriz
Definición 5. Sea A ∈ Mn(K). Decimos que una matriz columna no nula X ∈ Mn×1(K) es unautovector o vector propio de la matriz A si existe un escalar λ ∈ K tal que XA = λX . A este valorλ ∈ K se le llama autovalor o valor propio de la matriz A asociado al autovector X .
Proposición 1. Sea f : V → V un endomorfismo del espacio vectorial V sobre K, y A la matrizasociada a f en una cierta base B. Entonces:
1. λ ∈ K es autovalor de f ⇔ λ ∈ K es autovalor de A.
2. Si X es la matriz columna formada por las coordenadas de un vector ~x ∈ V en la base B,entonces
~v es un autovector ⇔ X es un autovectorde f asociado a λ de A asociado a λ
63

64 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
2.2. Cálculo de Autovalores
Teorema 1. Sea A ∈Mn(K). Entonces λ ∈ K es un autovalor de A⇔ el determinante de la matriz(A− λI) es nulo.
λ será autovalor de A si y sólo si el sistema homogéneo X(A− λI) = 0 tiene solución no nula. Estoocurre si y sólo si (A− λI) es una matriz singular, es decir su determinante es nulo.
Definición 6. Sea A ∈ Mn(K). Llamamos polinomio característico de la matriz A al determinantede la matriz (A− λI).
Definición 7. A la ecuación |A − λI| = 0 se la denomina ecuación característica y sus solucionesson los autovalores de A.
Si A es la matriz asociada a f en una cierta base B entonces:
dim Pλ = dimV − rang(A− λI)
Ejemplo 1. De los siguientes endomorfismos reales, hallar los autovalores y sus subespacios pro-pios asociados:
1. f(x, y) = (3x+ 2y, 2x)
2. f(x, y, z) = (2x+ y,−x+ z, x+ 3y + z)
3. f(x, y, z) = (x,−8x+ 4y − 6z, 8x+ y + 9z)
1. f(x, y) = (3x+ 2y, 2x)Calculamos la matriz asociada al endomorfismo en la base canónica:
f(1, 0) = (3, 2)f(0, 1) = (2, 0)
⇒M = MC(f) =
(3 22 0
)El polinomio característico se obtiene calculando el determinante |M − λI2|, donde I2 es la matrizidentidad de orden 2. Así
p(λ) = |M − λI2| =∣∣∣∣3− λ 2
2 −λ
∣∣∣∣ = −λ(3− λ)− 4 = λ2 − 3λ− 4
Igualando el polinomio característico a cero obtenemos la ecuación característica. Obtenemos lasraíces de la ecuación característica, que coinciden con los autovalores del endomorfismo:
λ =3±√
9 + 16
2=
3±√
25
2=
3± 5
2⇒ λ1 = 4; λ2 = −1
Calculamos ahora los subespacios propios correspondientes a cada autovalor, teniendo en cuenta quePλ = Ker(f − λIn). Para el autovalor 4 tenemos
P4 = Ker(M − 4I2) =
(−1 22 −4
)(xy
)=
(00
)⇒{−x+ 2y = 02x− 4y = 0
⇒ x = 2y ⇒{x = 2αy = α

2.2. CÁLCULO DE AUTOVALORES 65
Por lo que el subespacio propio asociado al autovalor 4 es P4 = 〈(2, 1)〉. Calculamos ahora elsubespacio asociado a λ2 = −1:
P−1 = Ker(M + I2) =
(4 22 1
)(xy
)=
(00
)⇒ 2x+ y = 0⇒ y = −2x⇒
{x = αy = −2α
Por lo que el subespacio propio asociado al autovalor −1 es P−1 = 〈(1,−2)〉.2. f(x, y, z) = (2x+ y,−x+ z, x+ 3y + z)Repetimos todo para este nuevo endomorfismo:
f(1, 0, 0) = (2,−1, 1)f(0, 1, 0) = (1, 0, 3)f(0, 0, 1) = (0, 1, 1)
⇒M = MC(f) =
2 1 0−1 0 11 3 1
El polinomio característico se obtiene calculando el determinante |M − λI3|, donde I3 es la matrizidentidad de orden 3. Así
p(λ) = |M − λI2| =
∣∣∣∣∣∣2− λ 1 0−1 −λ 11 3 1− λ
∣∣∣∣∣∣ = −λ(2− λ)(1− λ) + 1− 3(2− λ) + (1− λ) =
= −λ(2− 2λ− λ+ λ2) + 1− 6 + 3λ+ 1− λ = −λ(2− 3λ+ λ2) + 2λ− 4 = −2λ+ 3λ2−− λ3 + 2λ− 4 = −λ3 + 3λ2 − 4
Igualando el polinomio característico a cero obtenemos la ecuación característica λ3 − 3λ2 + 4 = 0.Obtenemos las raíces de la ecuación característica utilizando el método de Ruffini:
1 −3 0 42 2 −2 −4
1 −1 −2 02 2 2
1 1 0−1 −1
1 0
⇒ p(λ) = λ3 − 3λ2 + 4 = (λ+ 1)(λ− 2)2
Por tanto, los autovalores son λ1 = 2 doble y λ2 = −1 simple. Calculamos ahora los subespaciospropios correspondientes a cada autovalor, teniendo en cuenta que Pλ = Ker(f − λIn). Para elautovalor 2 tenemos
P4 = Ker(M − 2I2) =
0 1 0−1 −2 11 3 −1
xyz
=
000
⇒
y = 0−x− 2y + z = 0x+ 3y − z = 0
⇒
⇒{x = 0x = z
⇒
x = αy = 0z = α
Por lo que el subespacio propio asociado al autovalor 2 es P4 = 〈(1, 0, 1)〉. Calculamos ahora el

66 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
subespacio asociado a λ2 = −1:
P−1 = Ker(M + I2) =
3 1 0−1 1 11 3 0
xyz
=
000
⇒
3x+ y = 0−x+ y + z = 0x+ 3y = 0
⇒
3 1 0−1 1 11 3 1
F1=−F2−→
F2=F1+3F2F3+F2
1 −1 −10 4 30 4 2
−→F3−F2
1 −1 −10 4 30 0 −1
⇒
x = 0y = 0z = 0
Por lo que no hay subespacio propio asociado al autovalor −1.3. f(x, y, z) = (x,−8x+ 4y − 6z, 8x+ y + 9z)
f(1, 0, 0) = (1,−8, 8)f(0, 1, 0) = (0, 4, 1)f(0, 0, 1) = (0,−6, 9)
⇒M = MC(f) =
1 0 0−8 4 −68 1 9
El polinomio característico se obtiene calculando el determinante |M − λI3|, donde I3 es la matrizidentidad de orden 3. Así
p(λ) = |M − λI3| =
∣∣∣∣∣∣1− λ 0 0−8 4− λ −68 1 9− λ
∣∣∣∣∣∣ = (1− λ)(4− λ)(9− λ) + 6(1− λ) =
= (1− λ)(36− 4λ− 9λ+ λ2) + 6− 6λ = (1− λ)(36− 13λ+ λ2) + 6− 6λ = 36− 13λ+ λ2−− 36λ+ 13λ2 − λ3 + 6− 6λ = −λ3 + 14λ2 − 55λ+ 42
Igualando el polinomio característico a cero obtenemos la ecuación característica λ3− 14λ2 + 55λ−42 = 0. Obtenemos las raíces de la ecuación característica utilizando el método de Ruffini:
1 −14 55 −421 1 −13 42
1 −13 42 06 6 −42
1 −7 07 7
1 0
⇒ p(λ) = λ3 − 14λ2 + 55λ− 42 = (λ− 1)(λ− 6)(λ− 7)
Por tanto, los autovalores son λ1 = 1 simple, λ2 = 6 simple y λ3 = 7 simple. Calculamos ahora lossubespacios propios correspondientes a cada autovalor, teniendo en cuenta que Pλ = Ker(f − λIn).Para el autovalor 1 tenemos
P1 = Ker(M − I3) =
0 0 0−8 3 −68 1 8
xyz
=
000
⇒ {−8x+ 3y − 6z = 08x+ y + 8z = 0
⇒
⇒(−8 3 −68 1 8
)F3+F2−→
(−8 3 −60 4 2
)⇒{−8x+ 3y − 6z = 04y + 2z = 0
⇒
⇒{z = −2y−8x+ 3y + 12y = 0⇒ x = 15
8y⇒
x = 15αy = 8αz = −16α

2.3. DIAGONALIZACIÓN DE UN ENDOMORFISMO 67
Por lo que el subespacio propio asociado al autovalor 2 es P2 = 〈(15, 8,−16)〉. Calculamos ahora elsubespacio asociado a λ2 = 6:
P6 = Ker(M − 6I3) =
−5 0 0−8 −2 −68 1 3
xyz
=
000
⇒−5x = 0−8x− 2y − 6z = 08x+ y + 3z = 0
⇒
⇒{x = 0y = −3z
⇒
x = 0y = −3αz = α
Por lo que el subespacio propio asociado al autovalor 6 es P6 = 〈(0,−3, 1)〉. Por último, calculamosel subespacio asociado a λ2 = 7:
P6 = Ker(M − 6I3) =
−6 0 0−8 −3 −68 1 2
xyz
=
000
⇒−6x = 0−8x− 3y − 6z = 08x+ y + 2z = 0
⇒
⇒{x = 0y = −2z
⇒
x = 0y = −2αz = α
Por lo que el subespacio propio asociado al autovalor 7 es P7 = 〈(0,−2, 1)〉.
2.3. Diagonalización de un endomorfismoTeorema 2. Sea V un espacio vectorial sobre un cuerpoK y f : V → V un endomorfismo. Entoncesf es diagonalizable si y solamente si existe en V una base de autovectores de f .
Proposición 2. Sea V un espacio vectorial definido sobre K y f : V → V un endomorfismo. Enton-ces si: {λ1, λ2, · · · , λm} son autovalores distintos de f , entonces los autovectores correspondientes{~v1, ~v2, · · · , ~vm} son linealmente independientes, o equivalentemente, si P1, · · · ,Pm son los subes-pacios propios asociados, la suma
∑mi=1 Pi es directa. Si dimV = m, los vectores {~v1, ~v2, · · · ,
~vm} forman una base de V , teniendose que
P1 ⊕P2 ⊕ · · · ⊕Pm = V
Además, {λ1, · · · , λm} son los único autovalores del endomorfismo f .
Nota: Este teorema no implica que un endomorfismo con autovalores múltiples no pueda ser dia-gonalizable
2.4. Caracterización de una diagonalización
Definición 8. Sea f : V → V un endomorfismo en un espacio vectorial V definido sobre K. Siλ ∈ K es un autovalor de f , llamamos:
1. Multiplicidad algebraica de λ, ma(λ), al orden de multiplicidad de λ como raíz del polinomiocaracterístico de f .

68 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
2. Multiplicidad geométrica de λ, mg(λ), a la dimensión del subespacio propio asociado a λ, Pλ.
Si λ es un autovalor de f , entonces
1 ≤ mg(λ) ≤ ma(λ)
Teorema 3. Sea V un espacio vectorial de dimensión n definido sobre un cuerpo K y f : V → V unendomorfismo. Si los autovalores distintos de f son: λ1, λ2, · · · , λp ∈ K entonces f es diagonalizablesi y sólo si se verifican las dos siguientes condiciones:
1. ma(λ1) +ma(λ2) + · · ·+ma(λp) = n
2. ma(λi) = mg(λi) i = 1, . . . , p
• Una base de V estará formada por la unión de las bases de cada subespacio propio.
• Si A es la matriz de f , D = P−1AP con P una matriz que tiene por columnas las coordenadasde los correspondientes vectores propios y D es la matriz diagonal de valores propios.
Proposición 3. Sea A ∈Mn(K). Entonces:
1. A y At tienen los mismos autovalores.
2. λ autovalor de A⇔ kλ autovalor de kA.
3. λ autovalor de A⇔ kλ− k autovalor de kA− kI .
4. Si A es regular, λ autovalor de A⇔ 1A
autovalor de A−1.
5. λ autovalor de A⇔ λn autovalor de An.
Teorema 4 (de Cayley-Hamilton). Toda matriz A ∈ Mn(K) donde K es algebraicamente cerradoes raíz de su polinomio característico.
Ejemplo 2. Sea f : R3 → R3 conM = MBC=
1 −3 33 −5 36 −6 4
. DiagonalizaM .
Primeramente hay que calcular los valores propios de M (o de f ), siendo las raíces del polinomiocaracterístico:
p(λ) = |M − λI3| =
∣∣∣∣∣∣1− λ −3 3
3 −5− λ 36 −6 4− λ
∣∣∣∣∣∣ = (1− λ)(−5− λ)(4− λ)− 54− 54 + 18(5 + λ)+
+ 18(1− λ) + 9(4− λ) = (1− λ)(−20 + 5λ− 4λ+ λ2)− 108 + 90 + 18λ+ 18− 18λ+ 36−− 9λ = (1− λ)(−20 + λ+ λ2)− 9λ+ 36 = −20 + λ+ λ2 + 20λ− λ2 − λ3 − 9λ+ 36 = −λ3++ 12λ+ 16

2.4. CARACTERIZACIÓN DE UNA DIAGONALIZACIÓN 69
Igualando el polinomio característico a cero obtenemos la ecuación característica λ3− 12λ− 16 = 0.Obtenemos las raíces de la ecuación característica utilizando el método de Ruffini:
1 0 −12 −16−2 −2 4 16
1 −2 −8 0−2 −2 8
1 −4 04 4
1 0
⇒ p(λ) = λ3 − 12λ− 16 = (λ− 4)(λ+ 2)2
Resultando los valores propios 4 con multiplicidad algebraica 1 y −2 con multiplicidad algebraica 2.Como sabemos que la multiplicidad geométrica está acotada inferiormente por 1 y superiormente porla multiplicidad algebraica, tenemos que para el autovalor 4 la multiplicidad geométrica es necesaria-mente 1 por ser su multiplicidad algebráica 1. Veamos la multiplicidad geométrica de −2 para ver sies diagonalizable:
mg(−2) = dim P−2 = dim(R3)− rang(M − (−2)I3)
Calculamos el rango de M + 2I3 =
3 −3 33 −3 36 −6 6
. Como podemos ver, todas sus filas son proporcio-
nales y entonces rang(M+2I3) = 1. Por tantomg(−2) = 3−1 = 2 que coincide con su multiplicidadalgebraica, por lo tanto, el endomorfismo f es diagonalizable. Calculamos los vectores propios parael autovalor −2:
P−2 = Ker(M + 2I3) =
3 −3 33 −3 36 −6 6
xyz
=
000
⇒ 3x− 3y + 3z = 0⇒ z = y − x⇒
⇒
x = αy = βz = β − α
⇒P−2 = 〈(1, 0,−1), (0, 1, 1)〉
Calculamos los vectores propios para el autovalor 4:
P4 = Ker(M − 4I3) =
−3 −3 33 −9 36 −6 0
xyz
=
000
⇒−3x− 3y + 3z = 03x− 9y + 3z = 06x− 6y = 0
⇒
⇒
−3 −3 33 −9 36 −6 0
F2+F1−→F3+2F1
−3 −3 30 −12 60 −12 6
⇒ {−3x− 3y + 3z = 0−12y + 6z = 0
⇒
⇒{z = 2y−3x− 3y + 6y = 0⇒ x = y
⇒
x = αy = αz = 2α
⇒P4 = 〈(1, 1, 2)〉
Por lo tanto la matriz de paso y la matriz diagonal serán:
P =
1 0 10 1 1−1 1 2
D =
−2 0 00 −2 00 0 4

70 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
2.5. Forma canónica de JordanCuando una matriz no es diagonalizable, existe la posibilidad de encontrar una representación agra-dable, llamada forma canónica de Jordan.
Definición 9. Un polinomio se dice mónico cuando el coeficiente correspondiente al término de ma-yor grado es 1 o −1.
Definición 10. Se denomina polinomio mínimo de una matriz cuadrada al polinomio mónico de gra-do mínimo que dicha matriz satisface (la matriz es raíz del polinomio mínimo).
Proposición 4. Se tienen los siguientes resultados sobre el polinomio mínimo:
1. El polinomio mínimo es único.
2. El polinomio mínimo de una matriz cuadrada es divisor de todo polinomio que anule a la matriz.En particular, del polinomio característico.
Definición 11. Llamaremos bloque elemental de Jordan B(λ) a una matriz cuadrada triangular su-perior que tiene λ (autovalor) en la diagonal, unos en los elementos inmediatamente a la derecha dela diagonal principal y ceros en el resto, Es decir:
B(λ) =
λ 1 0 · · · 00 λ 1 · · · 0... . . . . . . . . . ...0 0 · · · λ 10 0 · · · 0 λ
Teorema 5. Toda matriz cuadradaA sobre un cuerpoK, algebraicamente cerrado, es semejante a unamatriz J diagonal por cajas denominada forma canónica de Jordan asociada a A, es decir, existe Pinversible tal que J = P−1AP
J =
B1(λ1) 0 · · · 0
0 B2(λ2) · · · 0... . . . . . . ...0 0 · · · Br(λr)
donde cada Bj(λj) es un bloque elemental de Jordan.
Si ni = dim(Bi(λi)), los polinomios mínimos y característicos de cada Bi(λi) coinciden y son (x−λi)
ni , y por lo tanto, los polinomios mínimo y característico de J son:
m(x) = m. c.m.{(x− λi)ni} p(x) =∏
(x− λi)ni
Asimismo se tiene que
• rang(J − λI) = rang(A− λI) para cada autovalor λ de A.

2.5. FORMA CANÓNICA DE JORDAN 71
• El número de bloques elementales de Jordan asociados a un autovalor coincide con su multipli-cidad geométrica.
Otra forma de calcular el número de bloques asociados a un autovalor es mediante la siguiente pro-posición.
Proposición 5. Sea A la matriz asociada a un endomorfismo f respecto una base B de dimensión n.El número de bloques de orden i asociados al autovalor λ de f que aparecen en la forma canónica deJordan J asociada a f es
n(λ, i) = rang(A− λIn)i−1 − 2 rang(A− λIn)i + rang(A− λIn)i+1
Nota: rang(A− λIn)0 = rang(In) = n.
Ejemplo 3. Las matrices de Jordan de tamaño 2 son de la forma(λ1 00 λ2
)y(λ 10 λ
)donde λ1 y
λ2 podrían ser iguales.
Ejemplo 4. Las matrices de Jordan de tamaño 3 son:λ1 0 00 λ2 00 0 λ3
,
λ1 0 00 λ2 10 0 λ2
,
λ1 1 00 λ1 00 0 λ2
,
λ 1 00 λ 10 0 λ
2.5.1. Introducción de los autovalores generalizados
Esperamos encontrar una matriz de paso P = (v1|~v2| . . . |~vn) que reduzca a A a su forma de Jordan,J = P ?1AP , o dicho de otro modo, PJ = AP , de modo que atendiendo al primer bloque de J ysuponiendo que este tiene orden m1, deducimos que las m1 primeras columnas de P satisfacen:
A~v1 = λ1~v1, es decir, ~v1 es un autovector correspondiente a λ1A~vi = λ~vi + ~vi−1, i = 2, . . . ,m1
o equivalentemente, expresándolo a través de la cadena
(A− λ1I)~v1 = 0(A− λ1I)~v2 = ~v1(A− λ1I)~v3 = ~v2
...(A− λ1I)~vm1 = ~vm1−1
Los vectores ~v2, ~v3, . . . , ~vm1 no son propiamente autovectores, pero se comportan de una forma muyparecida, y se llaman autovectores generalizados de A, y la sucesión {~v1, ~v2, . . . , ~vm1} se dice que esuna cadena de Jordan correspondiente a λ1. Naturalmente, cada bloque tiene su cadena correspon-diente.

72 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
2.5.2. Método de Caros para el cálculo de JAnalizaremos el caso en que el polinomio característico no tiene raíces complejas.
1. Se calculan los autovalores de A : λ1, λ2, . . . , λk, con sus multiplicidades algebraicas corres-pondientes ma(λ1),ma(λ2), . . . ,ma(λk).
2. Para cada autovalor λ de multiplicidad algebraica ma(λ) se calculan los rangos de las matrices(A− λI)p (a lo sumo habría que calcular hasta la potencia (A− λI)ma(λ)).
rang(A− λI) = r1 ⇒ x1 = n− r1 si x1 < ma(λ), seguimosrang(A− λI)2 = r2 ⇒ x2 = r1 − r2 si x1 + x2 < ma(λ), seguimos...
......
rang(A− λI)p = rp ⇒ xp = rp−1 − rp si x1 + x2 + · · ·+ xp < ma(λ), FIN
x1 + x2 + · · ·+ xp = multiplicidad algebraica de λ
3. Al valor propio λ le corresponden:
x1 − x2 bloques de Jordan de orden 1
x2 − x3 bloques de Jordan de orden 2...
......
xp−1 − xp bloques de Jordan de orden p− 1
xp bloques de Jordan de orden p
2.5.3. Cálculo de P por el método de CarosUna vez calculada la matriz J por el método de CAROS, procedemos a calcular la matriz P , esto es,a calcular en el orden adecuado una base formada por autovectores y autovectores generalizados deA.Para ello, dado un autovalor λ, tomemos un vector
~vi ∈ Ker(A− λI)i \Ker(A− λI)i−1
o lo que es lo mismo, un vector para el cual, según el método de CAROS, exista un bloque de Jordande orden i (empezamos con el valor máximo para el que conozcamos la existencia de una caja).Una vez obtenido ~vi , calculamos:
~vi−1 =(A− λI)~vi
~vi−2 =(A− λI)~vi−1...
~v2 =(A− λI)~v3
~v1 =(A− λI)~v2
y el vector ~v1 resulta ser un autovector de A (o una combinación lineal de ellos) y los vectores~vj j = 2, . . . , i son sus autovectores generalizados. Dichos vectores son las i primeras columnas

2.5. FORMA CANÓNICA DE JORDAN 73
de P : primero ~v1, y después ~v2, . . . , ~vi.Esta operación se repite para cada bloque de Jordan que nos indique el método de CAROS, obtenien-do así m autovectores (propios o generalizados) asociados al autovalor λ (donde m es el orden de lamatriz J). Para ello, y tras haber empezado con la caja de mayor orden, se continua buscando vectoresque satisfagan las condiciones expuestas y que sean, naturalmente, independientes de los anteriores.Repitiendo el proceso para cada λ llegamos a obtener n vectores independientes, es decir, una baserespecto de la cual, la matriz del endomorfismo viene dada por su Forma Canónica de Jordan, o loque es lo mismo, hemos encontrado la matriz de paso P .
Ejemplo 5. Determina la forma canónica de Jordan y la matriz del cambio asociada a la matrizdel endomorfismo f deR4 cuya matriz en la base canónica es:
A =
4 0 1 01 1 1 −10 −2 3 −1−1 2 −1 4
Calculamos primeramente los autovalores con el polinomio característico:
p(λ) = |A− λI4| =
∣∣∣∣∣∣∣∣4− λ 0 1 0
1 1− λ 1 −10 −2 3− λ −1−1 2 −1 4− λ
∣∣∣∣∣∣∣∣ahora podríamos desarrollar el determinante por la primera fila, pero optamos por hacer ceros
F2+F4−→
∣∣∣∣∣∣∣∣4− λ 0 1 0
0 3− λ 0 3− λ0 −2 3− λ −1−1 2 −1 4− λ
∣∣∣∣∣∣∣∣ = (3− λ)
∣∣∣∣∣∣∣∣4− λ 0 1 0
0 1 0 10 −2 3− λ −1−1 2 −1 4− λ
∣∣∣∣∣∣∣∣C4−C2−→
(3− λ)
∣∣∣∣∣∣∣∣4− λ 0 1 0
0 1 0 00 −2 3− λ 1−1 2 −1 2− λ
∣∣∣∣∣∣∣∣desarrollando por la segunda fila tenemos
(3− λ)
∣∣∣∣∣∣4− λ 1 0
0 3− λ 1−1 −1 2− λ
∣∣∣∣∣∣ = (3− λ)[(4− λ)(3− λ)(2− λ)− 1 + (4− λ)] = (3− λ)[(12−
− 4λ− 3λ+ λ2)(2− λ) + 3− λ] = (3− λ)(24− 14λ+ 2λ2 − 12λ+ 7λ2 − λ3 + 3− λ) =
= (3− λ)(−λ3 + 9λ2 − 27λ+ 27)
Igualando el polinomio característico a cero obtenemos la ecuación característica (λ− 3)(λ3− 9λ2 +

74 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
27λ− 27) = 0. Obtenemos las raíces de la ecuación característica utilizando el método de Ruffini:
1 −9 27 −273 3 −18 27
1 −6 9 03 3 −9
1 −3 03 3
1 0
⇒ p(λ) = (λ− 3)(λ3 − 9λ2 + 27λ− 27) = (λ− 3)4
Hemos concluido por tanto que hay un único autovalor, λ = 3, y de multiplicidad algebraicama(3) =4.Ahora buscamos la matriz J mediante dos métodos distintos. Por el algoritmo de Caros debemoshallar el rango de A− 3I4, y sus sucesivas potencias hasta que sea necesario. Lo detallamos a conti-nuación:
r1 = rang(A− 3I4) = rang
1 0 1 01 −2 1 −10 −2 0 −1−1 2 −1 1
1 0 1 01 −2 1 −10 −2 0 −1−1 2 −1 1
F2−F1−→F4+F1
1 0 1 00 −2 0 −10 −2 0 −10 2 0 1
Por tanto, r1 = rang(A− 3I4) = 2. De modo que x1 = 4− r1 = 4− 2 = 2. Como x1 6= 4, debemoscontinuar. Calculamos ahora rang(A− 3I4)
2. Para ello calculamos primero la matriz (A− 3I4)2:
1 0 1 01 −2 1 −10 −2 0 −1−1 2 −1 1
2
=
1 −2 1 −1
1− 2 + 1 4− 2− 2 1− 2 + 1 2− 1− 1−2 + 1 4− 2 −2 + 1 2− 1−1 + 2− 1 −4 + 2 + 2 −1 + 2− 1 −2 + 1 + 1
=
=
1 −2 1 −10 0 0 0−1 2 −1 10 0 0 0
Por tanto, r2 = rang(A − 3I4) = 1. Así que x2 = r1 − r2 = 2 − 1 = 1. Como x1 + x2 = 3 6= 4,debemos seguir multiplicando:
(A− 3I4)3 =
1 −2 1 −10 0 0 0−1 2 −1 10 0 0 0
1 0 1 01 −2 1 −10 −2 0 −1−1 2 −1 1
=
1− 2 + 1 4− 2− 2 1− 2 + 1 2− 1− 1
0 0 0 0−1 + 2− 1 −4 + 2 + 2 −1 + 2− 1 −2 + 1 + 1
0 0 0 0
=
0 0 0 00 0 0 00 0 0 00 0 0 0

2.5. FORMA CANÓNICA DE JORDAN 75
Por tanto, r3 = rang(A− 3I4)4 = 0. Esto significa que x3 = r2− r3 = 1− 0 = 1, con lo que ahora sí
sucede que x1 + x2 + x3 = 4. Por el algoritmo sabemos que hay x1 − x2 = 2− 1 = 1 caja de orden1× 1, x2− x3 = 1− 1 = 0 caja de orden 2× 2, y x3 = 1 caja de orden 3× 3. Así, la forma de Jordanasociada a la matriz A es
J =
3 0 0 00 3 1 00 0 3 10 0 0 3
Otro método de hallar J es utilizando la fórmula
n(λ, i) = rang(A− λIn)i−1 − 2 rang(A− λIn)i + rang(A− λIn)i+1
entonces tenemos que
n(3, 1) = rang(A− 3I4)0 − 2 rang(A− 3I4)
1 + rang(A− 3I4)1+1 =
= rang(I4)− 2 rang(A− 3I4) + rang(A− 3I4)2
Al aparecer un sólo bloque de Jordan de orden 1, la forma canónica de Jordan será:
J =
3 0 0 00 3 1 00 0 3 10 0 0 3
Nótese que no puede tener otra configuración, porque por ejemplo si hubiese un bloque de orden 2entonces tendrían que haber dos bloques de orden 1, pero al haber un sólo bloque de orden 1 el otrobloque tiene que ser de orden 3.Para obtener la matriz de paso P nos fijamos primero en la caja mayor, e intentamos encontrar unautovector generalizado que esté en Ker(A− λI4)3 \Ker(A− λI4)2. Como (A− 3I4)
3 era la matrizidénticamente nula, Ker(A−λI4)3 = R4, luego basta tomar un vector de R4 que no esté en Ker(A−λI4)
2. Buscamos una base que defina al subespacio vectorial Ker(A− λI4)2 (que tenía dimensión 1):
Ker(A−3I4)2 =
1 −2 1 −10 0 0 0−1 2 −1 10 0 0 0
xyzt
=
0000
⇒ x−2y+z−t = 0⇒
x = αy = βz = γt = α− 2β + γ
Por tanto, Ker(A−λI4)2 = 〈(1, 0, 0, 1), (0, 1, 0,−2), (0, 0, 1, 1)〉. Tenemos que escoger un vector quepertenezca a R4 pero que no pertenezca a Ker(A− λI4)2. Probamos con el vector (1, 0, 0, 0), viendosi es linealmente independiente con la base {(1, 0, 0, 1), (0, 1, 0,−2), (0, 0, 1, 1)}:∣∣∣∣∣∣∣∣
1 0 0 −10 1 0 −20 0 1 11 0 0 0
∣∣∣∣∣∣∣∣desarrollando por la primera columna∣∣∣∣∣∣
1 0 −20 1 10 0 0
∣∣∣∣∣∣−∣∣∣∣∣∣0 0 −11 0 −20 1 1
∣∣∣∣∣∣ = −1 6= 0
76 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Entonces podemos tomar ~v3 := (1, 0, 0, 0). Ahora simplemente calculamos
~v2 := (A− 3I4)~v3 =
1 0 1 01 −2 1 −10 −2 0 −1−1 2 −1 1
1000
=
110−1
Igualmente, obtenemos con otra multiplicación
~v1 := (A− 3I4)~v2 =
1 0 1 01 −2 1 −10 −2 0 −1−1 2 −1 1
110−1
=
1
1− 2 + 1−2 + 1−1 + 2− 1
=
10−10
Para completar P debemos fijarnos en la caja 1 × 1, es decir, debemos obtener otro autovector deA, esto es, otro elemento del núcleo de A − 3I4 (que tenía dimensión 2), que sea, por supuesto,independiente de ~v1, el autovector ya obtenido.
Ker(A− 3I4) =
1 0 1 01 −2 1 −10 −2 0 −1−1 2 −1 1
xyzt
=
0000
⇒
x+ z = 0x− 2y + z − t = 0−2y − t = 0−x+ 2y − z + t = 0
⇒
⇒
1 0 1 01 −2 1 −10 −2 0 −1−1 2 −1 1
F2−F1−→F4+F1
1 0 1 00 −2 0 −10 −2 0 −10 0 0 0
⇒ {x+ z = 0−2y − t = 0
⇒{z = −xt = −2y
⇒
x = αy = βz = −αt = −2β
⇒ Ker(A− 3I4) = 〈(1, 0,−1, 0), (0, 1, 0,−2)〉
El primero ya está en la segunda caja (coincide con el vector ~v1), y el segundo vector es el elementoque nos faltaba. Por el orden en que hemos escrito J (que por supuesto no es único), la matriz de pasoresultante es:
P =
0 1 1 11 0 1 00 −1 0 0−2 0 −1 0
Es conveniente verificar que P−1AP = J . Por tanto calculamos P−1:
0 1 1 1 1 0 0 01 0 1 0 0 1 0 00 −1 0 0 0 0 1 0−2 0 −1 0 0 0 0 1
F1=F2−→F4+2F2
1 0 1 0 0 1 0 00 1 1 1 1 0 0 00 −1 0 0 0 0 1 00 0 1 0 0 2 0 1
F2=−F1−→F3=F2+F3
1 0 1 0 0 1 0 00 1 0 0 0 0 −1 00 0 1 1 1 0 1 00 0 1 0 0 2 0 1
F1−F4−→F3=F4F4=F3−F4
1 0 0 0 0 −1 0 −10 1 0 0 0 0 −1 00 0 1 0 0 2 0 10 0 0 1 1 −2 1 −1

2.5. FORMA CANÓNICA DE JORDAN 77
Ahora hacemos
P−1AP =
0 −1 0 −10 0 −1 00 2 0 11 −2 1 −1
4 0 1 01 1 1 −10 −2 3 −1−1 2 −1 4
0 1 1 11 0 1 00 −1 0 0−2 0 −1 0
=
=
−1 + 1 −1− 2 −1 + 1 1− 4
0 2 −3 12− 1 2 + 2 2− 1 −2 + 4
4− 2 + 1 −2− 2− 2 1− 2 + 3 + 1 2− 1− 4
0 1 1 11 0 1 00 −1 0 0−2 0 −3 0
=
=
0 −3 0 −30 2 −3 11 4 1 23 −6 3 −3
0 1 1 11 0 1 00 −1 0 0−2 0 −1 0
=
−3 + 6 0 −3 + 3 02− 2 3 2− 1 04− 4 1− 1 1 + 4− 2 1−6 + 6 3− 3 3− 6 + 3 3
=
=
3 0 0 00 3 1 00 0 3 10 0 0 3
Ejemplo 6. Determinar la forma canónica de Jordan del endomorfimo de R3, cuya matriz en la
base canónica esA =
1 1 −10 3 10 0 1
, calculando la matriz de paso P .
Calculamos el polinomio característico:
p(λ) = |A− λI3| =
∣∣∣∣∣∣1− λ 1 −1
0 3− λ 10 0 1− λ
∣∣∣∣∣∣ = (1− λ)2(3− λ),
siendo sus raíces 3 simple (multiplicidad algebraica 1) y 1 doble (multiplicidad algebraica 2). Estu-diamos la multiplicidad geométrica de 1, que es:
mg(1) = dim(P1) = 3− rang(A− I3) = 3− rang
0 1 −10 2 10 0 0
= 3− 2 = 1,
no siendo diagonalizable. El polinomio mínimo se encuentra entre los polinomios que dividen alcaracterístico. Si el polinomio mínimo fuesem(λ) = (λ−3)(λ−1) el endomorfismo sería diagonali-zable, ya que el mayor orden de cualquier bloque elemental sería 1. Pero como hemos visto que no esdiagonalizable el polinomio mínimo coincidirá con el característiico y será m(λ) = (λ− 3)(λ− 1)2
(el signo no es importante). Por tanto, J =
1 1 00 1 00 0 3
.
Veamos a continuación otro método para la determinación de la matriz de paso P . Sabemos que existeun cambio de base, con matriz asociada P , de tal forma que en la nueva base la matriz del endomor-fismo que define A en R3 es J . Además se tiene que J = P−1AP . Si escribimos P = (~v1|~v2|~v3), parala matriz de paso, que tiene por columnas las coordenadas de los vectores de la nueva base, vi en la
78 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
base antigua, la canónica, tenemos que PJ = AP .Calculemos los núcleos, que nos harán falta para calcular la matriz de paso. Asociado a cada autovalorλ tenemos una cadena de inclusiones de los núcleos de las sucesivas potencias del endomorfismo quetiene por matriz A− λIn{0} ⊂ Ker(A− λIn) ⊂ Ker(A− λIn)2 ⊂ . . . ⊂ Ker(A− λIn)k ⊂ Ker(A− λIn)k + 1 ⊂ . . .
Esta cadena se estabiliza en la potencia que coincide con el grado del factor correspondiente en elpolinomio mínimo. Este hecho lo usaremos en todos los ejercicios en los que se nos pida la nuevabase o, de forma equivalente, la matriz de paso P . En el caso en el que sólo exista un autovalor, lacadena de inclusiones crece hasta que llega a ser todo el espacio vectorial. En este caso, al tener másde una cadena, estas no llegan a ser todo el espacio vectorial, sino que se estabilizan en la potenciaque coincide con el grado del factor asociado en el polinomio mínimo. Por tanto, en este caso comoel polinomio mínimo es m(λ) = (λ − 3)(λ − 1)2, la cadena correspondiente al autovalor λ = 3se estabilizará en la primera potencia y la correspondiente al autovalor λ = 1 se estabilizará en lasegunda. Construimos las cadenas de núcleos:
{0} ⊂ Ker(A− 3I3) = Ker(A− 3I3)2 = . . .
{0} ⊂ Ker(A− I3) ⊂ Ker(A− I3)2 = Ker(A− I3)3 = . . .
Determinamos los núcleos que aparecen en estas cadenas:
Ker(A− 3I3) =
−2 1 −10 0 10 0 −2
xyz
=
000
⇒−2x+ y − z = 0z = 0−2z = 0
⇒{
2x = yz = 0
⇒
⇒
x = αy = 2αz = 0
⇒ Ker(A− 3I3) = 〈(1, 2, 0)〉
Ker(A− I3) =
0 1 −10 2 10 0 0
xyz
=
000
⇒ {y − z = 02y + z = 0
⇒{y = z3y = 0⇒ y = 0
⇒
⇒
x = αy = 0z = 0
⇒ Ker(A− 3I3) = 〈(1, 0, 0)〉
Por último calculamos Ker(A− I3)2, pero para ello antes tenemos que calcular (A− I3)2:
(A− I3)2 =
0 1 −10 2 10 0 0
0 1 −10 2 10 0 0
=
0 2 10 4 20 0 0
Ker(A− I3)2 =
0 2 10 4 20 0 0
xyz
=
000
⇒ {2y + z = 0 ⇒ z = −2y ⇒
⇒
x = αy = βz = −2β
⇒ Ker(A− 3I3)2 = 〈(1, 0, 0), (0, 1,−2)〉

2.5. FORMA CANÓNICA DE JORDAN 79
Para determinar la matriz de paso P utilizamos la igualdad PJ = AP :
(~v1|~v2|~v3)
1 1 00 1 00 0 3
= A(~v1|~v2|~v3)
De aquí obtenemos, multiplicando, las relaciones
~v1 = A~v1~v1 + ~v2 = A~v23~v3 = A~v3
⇒A~v1 − ~v1 = 0A~v2 − ~v2 = ~v1A~v3 − 3~v3 = 0
⇒(A− I3)~v1 = 0(A− I3)~v2 = ~v1(A− I3)~v3 = 0
De las dos primeras igualdades deducimos que ~v2 ∈ Ker(A − I3)2 \ Ker(A − I3), y de la primera yla última que ~v1 ∈ Ker(A − I3) y ~v3 ∈ Ker(A − 3I3). A modo de ejemplo, como ~v2(A − I3) = ~v1,sustituimos esta expresión para ~v1 en ~v1(A − I3) y obtenemos ~v2(A − I3)
2 = 0 y por tanto ~v2 ∈Ker(A− I3)2. Le exigimos que no esté en el núcleo anterior Ker(A− I3), para que cuando tengamos~v2 y apliquemos A− I3 obtengamos ~v1 y no el vector nulo, que desde luego no podría formar parte deninguna base. Como ya tenemos determinados estos núcleos, no tenemos más que elegir, por ejemplo,~v2 := (0, 1,−2) ∈ Ker(A− I3)2 \ Ker(A− I3) = 〈(1, 0, 0), (0, 1,−2)〉 − 〈(1, 0, 0)〉 = 〈(0, 1,−2)〉,para tener que:
~v1 := (A− I3)~v2 =
0 1 −10 2 10 0 0
01−2
=
300
~v1 = (3, 0, 0) está en el núcleo de A − I3, y por último ~v3 := (1, 2, 0) que está en Ker(A − 3I3). Lanueva base así construida es {(0, 1,−2), (3, 0, 0), (1, 2, 0)} que tiene asociada la matriz de paso
P =
3 0 10 1 20 −2 0
Comprobamos que P−1AP = J . Calculamos P−1:
|P | =
∣∣∣∣∣∣3 0 10 1 20 −2 0
∣∣∣∣∣∣ = 12; Adj(P ) =
4 0 0−2 0 6−1 −6 3
; Adj(P )t =
4 −2 −10 0 −60 6 3
Adj(P )t
|P |=
1
12
4 −2 −10 0 −60 6 3
1
12
4 −2 −10 0 −60 6 3
1 1 −10 3 10 0 1
3 0 10 1 20 −2 0
=1
12
4 4− 6 −4− 2− 10 0 −60 18 6 + 3
1 1 −10 3 10 0 1
3 0 1
0 1 20 −2 0
=1
12
4 −2 −70 0 −60 18 9
3 0 10 1 20 −2 0
=1
12
12 −2 + 14 4− 40 12 00 18− 18 36
=
=1
12
12 12 00 12 00 0 36
=
1 1 00 1 00 0 3

80 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Ejemplo 7. Calcula la forma canónica de Jordan y la matriz de paso de
A =
2 0 3 01 2 0 30 0 2 00 0 1 2
Primero, calculamos el polinomio característico:
p(λ) =
∣∣∣∣∣∣∣∣2− λ 0 3 0
1 2− λ 0 30 0 2− λ 00 0 1 2− λ
∣∣∣∣∣∣∣∣ = (2− λ)
∣∣∣∣∣∣2− λ 3 0
0 2− λ 00 1 2− λ
∣∣∣∣∣∣ =
= (2− λ)2∣∣∣∣2− λ 0
1 2− λ
∣∣∣∣ = (2− λ)2
Posteriormente calculamos la multiplicidad geométrica de la única raíz 2
mg(2) = dim(P2) = 4− rang
0 0 3 01 0 0 30 0 0 00 0 1 0
= 4− 2 = 2 6= ma(2) = 4
no siendo diagonalizable. El polinomio mínimo divide al característico.
(A− 2I4)2 =
0 0 3 01 0 0 30 0 0 00 0 1 0
2
=
0 0 0 00 0 6 00 0 0 00 0 0 0
(A− 2I4)3 =
0 0 0 00 0 6 00 0 0 00 0 0 0
0 0 3 01 0 0 30 0 0 00 0 1 0
=
0 0 0 00 0 0 00 0 0 00 0 0 0
Entonces el polinomio mínimo es m(λ) = (λ− 2)3. Entonces tenemos la información suficiente para
tener que la forma canónica de Jordan de A es J =
2 1 0 00 2 1 00 0 2 00 0 0 2
.
Calculemos la matriz de paso. La cadena de inclusiones de núcleos para el autovalor 2 es
{0} ⊂ Ker(A− 2I4) ⊂ Ker(A− 2I4)2 ⊂ Ker(A− 2I4)
3 = R4
La última igualdad se debe a que el polinomio mínimo es m(λ) = (λ − 2)3 y entonces la matriz(A− 2λ4) = 0. Determinamos los núcleos.
Ker(A− 2I4) =
0 0 3 01 0 0 30 0 0 00 0 1 0
xyzt
=
0000
⇒ {x+ 3t = 0z = 0
⇒
x = 3αy = βz = 0t = −α
⇒
⇒ Ker(A− 2I4) = 〈(3, 0, 0,−1), (0, 1, 0, 0)〉

2.6. FORMA CANÓNICA DE JORDAN 81
Ker(A− 2I4)2 =
0 0 0 00 0 6 00 0 0 00 0 0 0
xyzt
=
0000
⇒ 6z = 0⇒ z = 0⇒
x = αy = βz = 0t = γ
⇒
⇒ Ker(A− 2I4) = 〈(1, 0, 0, 0), (0, 1, 0, 0), (0, 0, 0, 1)〉
Si P = (~v1|~v2|~v3|~v4), tenemos que
J = P−1AP ⇒ PJ = AP ⇒ (~v1|~v2|~v3|~v4)
2 1 0 00 2 1 00 0 2 00 0 0 2
= A(~v1|~v2|~v3|~v4)
y entonces2~v1 = A~v1
~v1 + 2~v2 = A~v2~v2 + 2~v3 = A~v3
2~v4 = A~v4
⇒
(A− 2I4)~v1 = 0(A− 2I4)~v2 = ~v1(A− 2I4)~v3 = ~v2(A− 2I4)~v4 = 0
Uniendo las tres primeras tenemos que ~v3 ∈ Ker(A− 2I4)3 \Ker(A− 2I4)
2 = R4 \Ker(A− 2I4)2,
para lo cual, podemos tomar ~v3 := (0, 0, 1, 0). Aplicando las igualdades, obtenemos:
~v2 := (A− 2I4)~v3 =
0 0 3 01 0 0 30 0 0 00 0 1 0
0010
=
3001
~v1 := (A− 2I4)~v2 =
0 0 3 01 0 0 30 0 0 00 0 1 0
3001
=
0600
La elección de ~v4 será de forma que ~v4 ∈ Ker(A − 2I4) pero independiente de ~v1, ya que ambospertenecen al mismo núcleo. Con lo cual ~v4 := (3, 0, 0,−1).En resumen la nueva base será:
B = {(0, 6, 0, 0), (3, 0, 0, 1), (0, 0, 1, 0), (3, 0, 0,−1)}
y la matriz de paso
P =
0 3 0 36 0 0 00 0 1 00 1 0 −1
2.6. Forma canónica de JordanCuando una matriz no es diagonalizable, existe la posibilidad de encontrar una representación agra-dable, llamada forma canónica de Jordan.

82 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Definición 12. Un polinomio se dice mónico cuando el coeficiente correspondiente al término demayor grado es 1 o −1.
Definición 13. Se denomina polinomio mínimo de una matriz cuadrada al polinomio mónico de gra-do mínimo que dicha matriz satisface (la matriz es raíz del polinomio mínimo).
Proposición 6. Se tienen los siguientes resultados sobre el polinomio mínimo:
1. El polinomio mínimo es único.
2. El polinomio mínimo de una matriz cuadrada es divisor de todo polinomio que anule a la matriz.En particular, del polinomio característico.
Definición 14. Llamaremos bloque elemental de Jordan B(λ) a una matriz cuadrada triangular su-perior que tiene λ (autovalor) en la diagonal, unos en los elementos inmediatamente a la derecha dela diagonal principal y ceros en el resto, Es decir:
B(λ) =
λ 1 0 · · · 00 λ 1 · · · 0... . . . . . . . . . ...0 0 · · · λ 10 0 · · · 0 λ
Teorema 6. Toda matriz cuadradaA sobre un cuerpoK, algebraicamente cerrado, es semejante a unamatriz J diagonal por cajas denominada forma canónica de Jordan asociada a A, es decir, existe Pinversible tal que J = P−1AP
J =
B1(λ1) 0 · · · 0
0 B2(λ2) · · · 0... . . . . . . ...0 0 · · · Br(λr)
donde cada Bj(λj) es un bloque elemental de Jordan.
Si ni = dim(Bi(λi)), los polinomios mínimos y característicos de cada Bi(λi) coinciden y son (x−λi)
ni , y por lo tanto, los polinomios mínimo y característico de J son:
m(x) = m. c.m.{(x− λi)ni} p(x) =∏
(x− λi)ni
Asimismo se tiene que
• rang(J − λI) = rang(A− λI) para cada autovalor λ de A.
• El número de bloques elementales de Jordan asociados a un autovalor coincide con su multipli-cidad geométrica.
Otra forma de calcular el número de bloques asociados a un autovalor es mediante la siguiente pro-posición.
Proposición 7. Sea A la matriz asociada a un endomorfismo f respecto una base B de dimensión n.El número de bloques de orden i asociados al autovalor λ de f que aparecen en la forma canónica deJordan J asociada a f es
n(λ, i) = rang(A− λIn)i−1 − 2 rang(A− λIn)i + rang(A− λIn)i+1

2.6. FORMA CANÓNICA DE JORDAN 83
Nota: rang(A− λIn)0 = rang(In) = n.
Ejemplo 8. Las matrices de Jordan de tamaño 2 son de la forma(λ1 00 λ2
)y(λ 10 λ
)donde λ1 y
λ2 podrían ser iguales.
Ejemplo 9. Las matrices de Jordan de tamaño 3 son:λ1 0 00 λ2 00 0 λ3
,
λ1 0 00 λ2 10 0 λ2
,
λ1 1 00 λ1 00 0 λ2
,
λ 1 00 λ 10 0 λ
2.6.1. Exponencial de una matriz
Dada una matriz cuadrada A, de orden n, definimos la exponencial de A como la matriz:
eA = In + A+A2
2!+A3
3!+ · · ·+ Ak
k!+ · · ·
Si J es la forma canónica de Jordan asociada a la matriz A con A = PJP−1 entonces
eA = PeJP−1
donde
J =
B1 0 · · · 00 B2 · · · 0...
... . . . ...0 0 · · · Br
Dada una matriz de Jordan, la exponencial será:
eJ =
eB1 0 · · · 00 eB2 · · · 0...
... . . . ...0 0 · · · eBr
donde
eBi = eλ
1 1
1!12!· · · 1
(ri−1)!0 1 1
1!· · · 1
(ri−2)!
0 0. . . ...
0 0 0. . . ...
0 0 0 0 1
siendo ri la dimensión de Bi.

84 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Ejemplo 10. Calcula eJ siendo J =
3 0 0 00 3 1 00 0 3 10 0 0 3
.
Calculamos la exponencial del bloque elemental de orden 3
e
3 1 00 3 10 0 3
= e3
1 1 12
0 1 10 0 1
Por tanto
eJ =
e3 0 0 0
0 e3 e3 e3
2
0 0 e3 e3
0 0 0 e3

2.7. EJERCICIOS DE INICIACIÓN. DIAGONALIZACIÓN 85
2.7. Ejercicios de iniciación. Diagonalización
1. Determina los autovalores y subespacios propios de los siguientes endomorfismos:a) f(x, y) = (3x+ 2y, 2x)b) f(x, y, z) = (2x+ y,−x+ z, x+ 3y + z)c) f(x, y, z) = (x,−8x+ 4y − 6z, 8x+ y + 9z)a) Hallamos la matriz de f en la base canónica:
f(1, 0) = (3, 2)f(0, 1) = (2, 0)
⇒ A = MC(f) =
(3 22 0
)Calculamos el polinomio característico:
p(λ) = |A− λI2| =∣∣∣∣3− λ 2
2 −λ
∣∣∣∣ = −λ(3− λ)− 4 = λ2 − 3λ− 4
Igualando a cero obtenemos la ecuación característica. Calculamos sus raíces:
1 −3 −4−1 −1 4
1 −4 04 4
1 0
⇒ p(x) = λ2 − 3λ− 4 = (λ+ 1)(λ− 4) = 0
Por tanto, las raíces son −1, simple, y 4 simple. Y como tenemos que 1 < mg(λ) < ma(λ), sabemosque los subespacios asociados a cada autovalor estarán formados por un autovector. Calculamos lossubespacios propios:
P−1 = Ker(A+ I2) =
(4 22 1
)(xy
)=
(00
)⇒ 2x+ y = 0⇒ y = −2x⇒
{x = αy = −2α
y entonces, el subespacio propio asociado a −1 es P−1 = 〈(1,−2)〉.
P4 = Ker(A− 4I2) =
(−1 22 −4
)(xy
)=
(00
)⇒ −x+ 2y = 0⇒ x = 2y ⇒
{x = 2αy = α
y por tanto, el subespacio propio de 4 es P4 = 〈(2, 1)〉.b)
f(1, 0, 0) = (2,−1, 1)f(0, 1, 0) = (1, 0, 3)f(0, 0, 1) = (0, 1, 1)
⇒ A =
2 1 0−1 0 11 3 1
p(λ) = |A− λI3| =
∣∣∣∣∣∣2− λ 1 0−1 −λ 11 3 1− λ
∣∣∣∣∣∣ = −λ(2− λ)(1− λ) + 1− 3(2− λ) + (1− λ) =
= −λ(2− 2λ− λ+ λ2) + 1− 6 + 3λ+ 1− λ = −λ3 + 3λ2 − 2λ+ 2λ− 4 = −λ3 + 3λ2 − 4

86 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
La ecuación característica es λ3 − 3λ2 + 4 = 0:
1 −3 0 42 2 −2 −4
1 −1 −2 02 2 2
1 1 0−1 −1
1 0
⇒ λ3 − 3λ2 + 4 = (λ− 2)2(λ+ 1) = 0
P2 = Ker(A− 2I3) =
0 1 0−1 −2 11 3 −1
xyz
=
000
⇒
y = 0−x− 2y + z = 0x+ 3y − z = 0
⇒{x = zy = 0
⇒
⇒
x = αy = 0z = α
⇒P2 = 〈1, 0, 1〉
P−1 = Ker(A+ I3) =
3 1 0−1 1 11 3 2
xyz
=
000
⇒
3x+ y = 0−x+ y + z = 0x+ 3y + 2z = 0
⇒
⇒
3 1 0−1 1 11 3 2
F1=F3−→F2+F3F3=F1−3F3
1 3 20 4 30 −8 −6
⇒ {x+ 3y + 2z = 04y + 3z = 0
⇒ y = −3z
4;
x = −3 · 3z
4+ 2z = −9z
4+
8z
4= −z
4⇒
y = 3αx = αz = −4α
⇒P−1 = 〈(1, 3,−4)〉
c)f(1, 0, 0) = (1,−8, 8)f(0, 1, 0) = (0, 4, 1)f(0, 0, 1) = (0,−6, 9)
⇒ A =
1 0 0−8 4 −68 1 9
p(λ) = |A− λI3| =
∣∣∣∣∣∣1− λ 0 0−8 4− λ −68 1 9− λ
∣∣∣∣∣∣ = (1− λ)
∣∣∣∣4− λ −61 9− λ
∣∣∣∣ = (1− λ)[(4− λ)(9− λ)+
+ 6] = (1− λ)(36− 4λ− 9λ+ λ2 + 6) = (1− λ)(λ2 − 13λ+ 42)
La ecuación característica es (λ− 1)(λ2 − 13λ+ 42) = 0, buscamos las raíces:
λ =13±
√132 − 4 · 42
2=
13±√
169− 168
2=
13±√
1
2=
13± 1
2; λ1 = 7, λ2 = 6

2.7. EJERCICIOS DE INICIACIÓN. DIAGONALIZACIÓN 87
Entonces tenemos que p(λ) = (λ− 1)(λ− 7)(λ− 6) = 0.
P1 = Ker(A− I3) =
0 0 0−8 3 −68 1 8
xyz
=
000
⇒ {−8x+ 3y − 6z = 08x+ y + 8z = 0
⇒
⇒{−8x+ 3y − 6z = 04y + 2z = 0
⇒{z = −2y−8x+ 3y − 6 · (−2y) = 0
⇒{z = −2yx = 15
8y⇒
x = 15αy = 8αz = −16α
Entonces P1 = 〈(15, 8,−16)〉.
P7 = Ker(A− 7I3) =
−6 0 0−8 −3 −68 1 2
xyz
=
000
⇒−6x = 0−8x− 3y − 6z = 08x+ y + 2z = 0
⇒
⇒{x = 0y = −2z
⇒
x = 0y = −2αz = α
⇒P7 = 〈(0,−2, 1)〉
P6 = Ker(A− 6I3) =
−5 0 0−8 −2 −68 1 3
xyz
=
000
⇒−5x = 0−8x− 2y − 6z = 08x+ y + 3z = 0
⇒
⇒{x = 0y = −3z
⇒
x = 0y = −3αz = α
⇒P6 = 〈(0,−3, 1)〉
2. ¿Es diagonalizable en R el endomorfismo f(x, y, z) = (−z, 0, x).
f(1, 0, 0) = (0, 0, 1)f(0, 1, 0) = (0, 0, 0)f(0, 0, 1) = (−1, 0, 0)
⇒ A =
0 0 −10 0 01 0 0
Calculamos el polinomio característico:
p(λ) =
∣∣∣∣∣∣−λ 0 −10 −λ 01 0 −λ
∣∣∣∣∣∣ = −λ3 − λ = 0⇒ λ(λ2 + 1) = 0; λ1 = 0, λ2 = ±√−1 = ±i
Tenemos que tener tantas raíces distintas como la dimensión del espacio vectorial (el orden de lamatriz) para poder afirmar que el endomorfismo es diagonalizable. Como las raíces i y −i no sonreales, no hay suficientes raíces y entonces el endomorfismo no es diagonalizable.
3. Dada una baseB = {e1, e2, e3} de un espacio vectorial real, estudia si es diagonalizable elendomorfismo dado por:
• f(e1 − e2) = −3e1 − 2e2 + e3.
• f(e1 + e3) = −3e1 − 3e2.

88 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
• f(3e2 − 3e3) = 4e1 + 3e2 + e3.
Como la aplicación f es lineal:
f(e1)− f(e2) = (−3,−2, 1)f(e1) + f(e3) = (−3,−3, 0)3f(e2)− 3f(e3) = (4, 3, 1)
1 −1 0 −3 −2 11 0 1 −3 −3 00 3 −3 4 3 1
F2−F1−→
1 −1 0 −3 −2 10 1 1 0 −1 −10 3 −3 4 3 1
−→F3−3F21 −1 0 −3 −2 1
0 1 1 0 0 −10 0 −6 4 6 4
⇒ f(e1)− f(e2) = (−3,−2, 1)f(e2) + f(e3) = (0, 0,−1)−6f(e3) = (4, 3, 4)
⇒
⇒−6f(e3) = (4, 6, 4)⇒ f(e3) = (−2
3,−1,−2
3)
f(e2) + f(e3) = (0, 0,−1)⇒ f(e2) = (0,−1,−1)− (−23,−1,−2
3) = (2
3, 0,−1
3)
f(e1)− f(e2) = (−3,−2, 1)⇒ f(e1) = (−3,−2, 1) + (23, 0,−1
3) = (−7
3,−2, 2
3)
Podemos comprobar que se cumplen las igualdades del enunciado:
f(e1)− f(e2) = (−7
3,−2,
2
3)− (
2
3, 0,−1
3) = (−9
3,−2,
3
3) = (−3,−2, 1) = −3e1 − 2e2 + e3
f(e1) + f(e3) = (−7
3,−2,
2
3) + (−2
3,−1,−2
3) = (−9
3,−3, 0) = (−3,−3, 0) = −3e1 − 3e2
3f(e2)− 3f(e3) = 3(2
3, 0,−1
3)− 3(−2
3,−1,−2
3) = (4, 3, 1) = 4e1 + 3e2 + e3
Por tanto, estamos seguros de que:
f(e1) = −7
3e1 − 2e2 +
2
3e3; f(e2) =
2
3e1 −
1
3e3; f(e3) = −2
3e1 − e2 −
2
3e3
Y por tanto la matriz de f en la base canónica es:
M = MB(f) =
−73
23−2
3
−2 0 −123−1
3−2
3
El polinomio característico es
p(λ) = |M − λI3| =
∣∣∣∣∣∣−7
3− λ 2
3−2
3
−2 −λ −123
−13−2
3− λ
∣∣∣∣∣∣ = −λ(−7
3− λ)(−2
3− λ)− 4
9− 4
9− 4
9λ+
+1
3
(7
3+ λ
)+
4
3
(−2
3− λ)
= −λ(
14
9+
7
3λ+
2
3λ+ λ2
)− 8
9− 4
9λ+
7
9+
1
3λ− 8
9− 4
3λ =
= −14
9λ− 9
3λ2 − λ3 − 8
9− 4
9λ+
7
9+
3
9λ− 8
9− 12
9λ− 1 = −λ3 − 3λ2 − 27
9λ− 1 =
= −λ3 − 3λ2 − 3λ− 1

2.7. EJERCICIOS DE INICIACIÓN. DIAGONALIZACIÓN 89
La ecuación característica es λ3 + 3λ2 + 3λ+ 1 = 0. Calculamos sus raíces:
1 3 3 1−1 −1 −2 −1
1 2 1 0−1 −1 −1
1 1 0−1 −1
1 0
⇒ λ3 + 3λ2 + 3λ+ 1 = (λ+ 1)3 = 0
Tenemos entonces unas sola raíz triple que es −1 (con multiplicidad algebraica 3). Calculamos sumultiplicidad geométrica:
mg(−1) = 3− rang(M + I3) = 3− rang
−43
23−2
3
−2 1 −123−1
313
Como podemos ver, todas las filas son proporcionales, por tanto tenemos que mg(−1) = 3− 1 = 2.Como la multiplicidad algebraica no coincide con la geométrica concluimos que la matriz no esdiagonalizable.
4. Halla la potenciaAn de la matrizA =
1 1 00 2 0−2 1 3
.
Tenemos que An = PDnP−1. Entonces tenemos que calcular la matriz diagonal D y la matriz depaso P . Calculamos el polinomio característico:
p(λ) = |A− λI3| =
∣∣∣∣∣∣1− λ 1 0
0 2− λ 0−2 1 3− λ
∣∣∣∣∣∣ = (1− λ)(2− λ)(3− λ)
Las raíces de la ecuación característica son 1, 2 y 3. Como tenemos tantas raíces distintas comola dimensión del espacio vectorial (orden de la matriz) podemos afirmar que el endomorfismo esdiagonalizable. Determinamos los espacios propios correspondientes para formar la matriz de pasoP :
P1 = Ker(A− I3) =
0 1 00 1 0−2 1 2
xyz
=
000
⇒ {y = 0−2x+ y + 2z = 0
⇒{y = 0x = z
⇒
⇒
x = αy = 0z = α
⇒P1 = 〈(1, 0, 1)〉
P2 = Ker(A− 2I3) =
−1 1 00 0 0−2 1 1
xyz
=
000
⇒ {−x+ y = 0−2x+ y + z = 0
⇒{x = yx = z
⇒
⇒
x = αy = αz = α
⇒P2 = 〈(1, 1, 1)〉

90 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
P3 = Ker(A− 3I3) =
−2 1 00 −1 0−2 1 0
xyz
=
000
⇒ {−2x+ y = 0−y = 0
⇒{x = 0y = 0
⇒
⇒
x = 0y = 0z = α
⇒P3 = 〈(0, 0, 1)〉
Tenemos por tanto que una matriz de paso es P =
1 1 00 1 01 1 1
, donde hemos colocado en la primera
columna el vector propio asociado a 1, en la segunda el asociado a 2 y en la tercera el asociado a 3.
Esto nos obliga a escribir la matriz diagonal en el mismo orden, es decir, D =
1 0 00 2 00 0 3
. Nos falta
calcular la inversa de la matriz de paso:
|P | =
∣∣∣∣∣∣1 1 00 1 01 1 1
∣∣∣∣∣∣ = 1; Adj(P ) =
1 0 −1−1 1 00 0 1
; Adj(P )t =
1 −1 00 1 0−1 0 1
;
P−1 =Adj(P )t
|P |=
1 −1 00 1 01 3 1
Entonces tenemos que
An =
1 1 00 1 01 1 1
1 0 00 2n 00 0 3n
1 −1 00 1 0−1 0 1
=
1 2n 00 2n 01 2n 3n
1 −1 00 1 0−1 0 1
=
=
1 2n − 1 00 2n 0
1− 3n 2n − 1 3n
5. Halla los autovalores y subespacios propios del endomorfismo f : R2[x]→ R2[x] definido
por f(p(x)) = p(x+ 1).Recordemos que la base canónica para los polinomios de segundo grado es C = {1, x, x2}. Hallamosla matriz de f en la base canónica:
f(1) = 1f(x) = x+ 1f(x2) = (x+ 1)2 = x2 + 2x+ 1
⇒ A = MC(f) =
1 1 10 1 20 0 1
Calculamos ahora el polinomio característico:
p(λ) = |A− λI3| =
1− λ 1 10 1− λ 20 0 1− λ
= (1− λ)3
Entonces la ecuación característica es p(λ) = (1 − λ)3 = 0 y la única raíz de esta ecuación esλ = 1 (triple) con multiplicidad algebraica 3. Calculamos el subespacio propio asociado a este único

2.7. EJERCICIOS DE INICIACIÓN. DIAGONALIZACIÓN 91
autovalor:
P1 = Ker(A− I3) =
0 1 10 0 20 0 0
xyz
=
000
⇒ {y + z = 02z = 0
⇒{y = 0z = 0
⇒
x = αy = 0z = 0
Y entonces P1 = 〈(1, 0, 0)〉.
6. Determina, en función de los valores de los parámetros, si es diagonalizable la matriz:
a)A =
2 3 3a −1 −2a 0 1
b)A =
a b 00 −1 00 0 1
a)
p(λ) = |A− λI3| =
∣∣∣∣∣∣2− λ 3 3a −1− λ −2a 0 1− λ
∣∣∣∣∣∣ = (2− λ)(−1− λ)(1− λ)− 6a+ 3a(1 + λ)−
− 3a(1− λ) = (−2− 2λ+ λ+ λ2)(1− λ)− 6a+ 3a+ 3aλ− 3a+ 3aλ = (−2− λ+ λ2)(1−− λ) + 6aλ− 6a = −2− λ+ λ2 + 2λ+ λ2 − λ3 + 6aλ− 6a = −λ3 + 2λ2 + 6aλ+ λ− 6a− 2
La ecuación característica es λ3 − 2λ2 − 6aλ− λ+ 6a+ 2 = 0. Calculamos sus raíces:
1 −2 −6a− 1 6a+ 21 1 −1 −6a− 2
1 −1 −6a− 2 0
λ2 − λ− 6a− 2 = 0⇒ λ =1±
√1− 4(−6a− 2)
2=
1±√
24a+ 9
2
Y entonces tenemos las raíces 1, 12(1 +
√24a+ 9) y 1
2(1 −
√24a+ 9). Como no hay ninguna res-
tricción para el cuerpo K, las raíces imaginarias sirven como autovalores. Entonces tenemos tresautovalores distintos y por la acotación de la multiplicidad geométrica sabemos que habrá un vectorpropio asociado a cada uno de ellos. Por lo tanto la matriz A es diagonalizable.b) Calculamos el polinomio característico:
p(λ) = |A− λI3| =
∣∣∣∣∣∣a− λ b 0
0 −1− λ 00 0 1− λ
∣∣∣∣∣∣ = (a− λ)(−1− λ)(1− λ)
Entonces, la ecuación característica es p(λ) = (λ− a)(λ+ 1)(λ− 1) = 0 y las raíces de la ecuacióncaracterística son λ1 = a, λ2 = −1 y λ3 = 1. Si estas tres raíces fueran distintas (dependerá del valorde a), podríamos asegurar que A es diagonalizable. Entonces si a 6= −1 y a 6= 1 podemos asegurarque A es diagonalizable. Habrá que estudiar el caso en el que a = −1 y a = 1. En el caso en el quea = −1 la ecuación característica queda p(λ) = (λ + 1)2(λ − 1) con lo que obtenemos los valores

92 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
propios, λ1 = −1 (doble) y λ2 = 1 (simple). Calculamos la multiplicidad geométrica del valor propio−1:
mg(−1) = 3− rang(A+ I3) = 3− rang
0 b 00 0 00 0 2
Si b = 0 mg(−1) = 3 − 1 = 2, la multiplicidad geométrica coincide con la algebraica, y entoncesA es diagonalizable. Si b 6= 0 mg(−1) = 3 − 2 = 1, la multiplicidad geométrica no coincide con laalgebraica, y entonces A no es diagonalizable. En el caso en el que a = 1 la ecuación característicaqueda p(λ) = (λ+ 1)(λ− 1)2 con lo que obtenemos los valores propios λ1 = −1 (simple) y λ2 = 1(doble). Calculamos la multiplicidad geométrica del valor propio 1:
mg(1) = 3− rang(A− I3) = 3− rang
0 b 00 −2 00 0 0
= 3− 1 = 2
ya que no importa lo que valga b que las dos primeras filas siempre van a ser proporcionales. Entoncescomo la multiplicidad geométrica coincide con la algebraica A es diagonalizable.
7. Se sabe que el endomorfismo f : R2 → R2 es diagonalizable, que (1, 2) y (3, 1) son auto-vectores y que f(5,−5) = (2,−1). Halla sus autovalores y su matriz en la base canónica.Los autovectores (1, 2) y (3, 1) cumplen que
f(1, 2) = λ(1, 2) f(3, 1) = µ(3, 1)
Por otra parte, tenemos que (5,−5) debe ser combinación lineal de (1, 2) y (3, 1) (¿por qué?):
(5,−5) = a(1, 2) + b(3, 1)⇒{
5 = a+ 3b⇒ a = 5− 3b−5 = 2a+ b
⇒ −5 = 10− 6b+ b⇒
5b = 15⇒ b = 3; a = 5− 9 = −4
Entonces tenemos que
f(−4(1, 2) + 3(3, 1)) = −4f(1, 2) + 3f(3, 2) = −4λ(1, 2) + 3µ(3, 2) = (2,−1)⇒
⇒{−4λ+ 9µ = 2−8λ+ 3µ = −1
⇒{
8λ− 18µ = −4−8λ+ 3µ = 1
⇒ −15µ = −5⇒ µ =1
3; −8λ+ 3 · 1
3= 1⇒
− 8λ = −2⇒ λ =1
4
Entonces, ahora que tenemos los autovalores, la matriz diagonal es
D =
(14
00 1
3
)Calculamos ahora la matriz de f , A = PDP−1. La matriz de paso P es
P =
(1 32 1
)

2.7. EJERCICIOS DE INICIACIÓN. DIAGONALIZACIÓN 93
calculamos su matriz inversa:
|P | =∣∣∣∣1 32 1
∣∣∣∣ = 1− 6 = −5; Adj(P ) =
(1 −2−3 1
); Adj(P )t =
(1 −3−2 1
);
P−1 =Adj(P )t
|P |= −1
5
(1 −3−2 1
)=
(−1/5 3/52/5 −1/5
)Calculamos A:
A = −1
5
(1 32 1
)(14
00 1
3
)(1 −3−2 1
)= −1
5
(14
112
13
)(1 −3−2 1
)= −1
5
(14− 2 −3
4+ 1
12− 2
3−3
2+ 1
3
)=
= −1
5
(14− 8
4−3
4+ 4
436− 4
6−9
6+ 2
6
)= −1
5
(−7
414
−16−7
6
)=
(720− 1
20130
730
)8. Determina la forma canónica de Jordan del endomorfismo f de R4 cuya matriz en la base
canónica es:
a)A =
4 0 1 01 1 1 −10 −2 3 −1−1 2 −1 4
b)A =
2 0 3 01 2 0 30 0 2 00 0 1 2
a) Está resuelto en el ejemplo 5 de la página 73.b) Está resuelto en el ejemplo 7 de la página 80.
9. Determina la forma canónica de Jordan y la matriz de paso del endomorfismo f de R3 cuyamatriz en la base canónica es:
A =
1 1 −10 3 10 0 1
Está resuelto en el ejemplo 6 de la página 77.

94 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
2.8. Ejercicios del tema 2
1. Sea f : R3 → R3 conM = MC(f) =
1 −3 33 −5 36 −6 4
.
1. Calcule los valores propios deM .
2. Calcule una base y la dimensión de cada uno de los subespacios propios.
3. ¿Es posible diagonalizarM?
1. Los valores propios de M , o de f , se obtienen calculando las raíces del polinomio característico.
p(λ) = |M − λI3| =
∣∣∣∣∣∣1− λ −3 3
3 −5− λ 36 −6 4− λ
∣∣∣∣∣∣ = −(1− λ)(5 + λ)(4− λ)− 54− 54 + 18(5 + λ)+
+ 18(1− λ) + 9(4− λ) = −(1− λ)(20− 5λ+ 4λ− λ2)− 9λ+ 36 = −(1− λ)(20− λ− λ2)−− 9λ+ 36 = −20 + λ+ λ2 + 20λ− λ2 − λ3 − 9λ+ 36 = −λ3 + 12λ+ 16
Igualando a cero este polinomio se obtiene la ecuación característica λ3− 12λ− 16 = 0. Calculamoslas raíces:
1 0 −12 −164 4 16 16
1 4 4 0−2 −2 −4
1 2 0−2 −2
1 0
⇒ p(λ) = λ3 − 12λ− 16 = (λ− 4)(λ+ 2)2 = 0
Entonces, los valores propios son 4, con multiplicidad algebraica 1, y −2, multiplicidad algebraica 2.2. Calculamos ahora una base de cada subespacio propio:
P−2 = Ker(M + 2I3) =
3 −3 33 −3 36 −6 6
xyz
=
000
⇒ 3x− 3y + 3z = 0⇒ x = y − z ⇒
⇒
x = α− βy = αz = β
⇒P−2 = 〈(1, 1, 0), (−1, 0, 1)〉
La dimensión del subespacio propio asociado a −2 es 2.
P4 = Ker(M − 4I3) =
−3 −3 33 −9 36 −6 0
xyz
=
000
−3 −3 3
3 −9 36 −6 0
− 13F1−→
F2+F1F3+2F1
1 1 −10 −12 60 −12 6

2.8. EJERCICIOS DEL TEMA 2 95
P4 = Ker(M − 4I3) =
1 1 −10 −12 60 −12 6
xyz
=
000
⇒ {x+ y − z = 0−12y = 6z = 0
⇒{z = 2yx = y
⇒
⇒
x = αy = αz = 2α
⇒P4 = 〈(1, 1, 2)〉
La dimensión del subespacio propio asociado a 4 es 1.3. Como la multiplicidad geométrica de cada autovalor es igual que la algebraica podemos afirmarque es posible diagonalizar M .
2. Sea A =
0 −1 b−1 0 bb −1 0
con b ∈ N. Estudie para qué valores del parámetro natural b la
matrizA es diagonalizable. Indicación: el polinomio característico es divisible por t+ b.Calculamos el polinomio característico:
p(λ) = |A− λI3| =
∣∣∣∣∣∣−λ −1 b−1 −λ bb −1 −λ
∣∣∣∣∣∣ = −λ3 − b2 + b+ b2λ− bλ+ λ = −l3 + (b2 − b+ 1)λ+
+ (b− b2)
Nos indican que este polinomio es divisible por t + b, por lo que probamos a descomponerlo con laraíz −b:
1 0 −b2 + b− 1 b2 − b−b −b b2 −b2 + b
1 −b b− 1 01 1 −b+ 1
1 −b+ 1 0b− 1 b− 1
1 0
El polinomio característico se factoriza de la forma
p(λ) = λ3 − (b2 − b+ 1)λ+ (b2 − b) = (λ− 1)(λ+ b)(λ− (b− 1)
y entonces las raíces son λ1 = 1, λ2 = −b y λ3 = b − 1. Si las tres raíces son distintas podemosasegurar que A es diagonalizable porque cada autovalor tendrá un vector propio asociado. Sin em-bargo, si hay raíces con multiplicidad algebraica mayor que 1 habrá que comprobar la multiplicidadgeométrica. Los posibles casos dependen de los valores que tome b. Veamos primero que valores de bhacen que las tres raíces sean distintas. Si λ1 = λ2, b = −1; si λ1 = λ3, b = 2; y si λ2 = λ3, b = 1/2.Luego si b es distinto de −1, 2 y 1/2 la matriz A es diagonalizable. Pero como b es natural no puedetomar los valores −1 y 1/2, por lo que b solo tiene que ser distinto de 2. Estudiemos el caso en el queb = 2. En este caso el polinomio característico queda p(λ) = (λ − 1)2(λ + 2) con lo que obtenemosdos valores propios, λ1 = 1 (doble) y λ2 = −2 (simple). Comprobamos la multiplicidad geométricadel valor propio 1:
mg(1) = dim(P1) = dim(R3)− rang(A− I3) = 3− rang
−1 −1 2−1 −1 22 −1 −1
= 3− 2 = 1

96 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Como la multiplicidad geométrica no es igual que la algebraica la matriz A no es diagonalizable. Demodo que A solo es diagonalizable si b 6= 2.
3. SeaA ∈M3(R) una matriz con autovalores λ1 = 1, λ2 = 4 y λ3 = α, con α ∈ R. Consi-deremos los vectores u = (1, 0, 1), v = (0, 1, 0) y w = (0, 0, 1) y supongamos que ~u ∈ P1,~v ∈ P4 y ~w ∈ Pα.
1. ¿EsA diagonalizable? CalculeA.
2. Discuta para qué valores de α esA inversible.
3. Encuentre (cuando sea posible) una “raíz cuadrada” deA.
1. Si los vectores ~u, ~v y ~w son linealmente independientes, A es diagonalizable. Comprobamos si loson:
|P | =
∣∣∣∣∣∣1 0 00 1 01 0 1
∣∣∣∣∣∣ = 1 6= 0
Entonces tenemos que D = P 1AP con P =
1 0 00 1 01 0 1
y D =
1 0 00 4 00 0 α
. Para calcular A
tenemos que calcular primero la inversa de P :
Adj(P ) =
1 0 −10 1 00 0 1
; Adj(P )t =
1 0 00 0 0−1 0 1
; P−1 =Adj(P )t
|P |=
1 0 00 0 0−1 0 1
;
Entonces podemos calcular A:
A =
1 0 00 1 01 0 1
1 0 00 4 00 0 α
1 0 00 0 0−1 0 1
=
1 0 00 4 01 0 α
1 0 00 0 0−1 0 1
=
1 0 00 4 0
1− α 0 α
2. Como el determinante es invariante frente a semejanza, |A| = |D| = 4α. Por tanto, A es inversiblesi, y sólo si, 4α 6= 0⇒ α 6= 0.3. Una raíz cuadrada de A es una matriz B tal que B2 = A. Si D′ es una raíz cuadrada de D, entoncesPD′P−1 lo es de A. Entonces tenemos que una raíz de A es
B =
1 0 00 1 01 0 1
1 0 00 2 00 0
√α
1 0 00 0 0−1 0 1
=
1 0 00 2 01 0
√α
1 0 00 0 0−1 0 1
=
1 0 00 2 0
1−√α 0
√α
donde α ≥ 0.

2.8. EJERCICIOS DEL TEMA 2 97
4. Consideremos tres sucesiones infinitas de números reales {xi}, {yi} y {zi} verificandoxnynzn
=
3 0 −18 −2 −42 0 0
xn−1
yn−1
zn−1
para n ∈ N∗. Calcule una expresión que proporcione los términos generales para cada sucesiónen función de x0, y0 y z0. Indicación: pruebe en primer lugar, usando inducción, quexnyn
zn
= An
x0
y0z0
, n ∈ N, dondeA =
3 0 −18 −2 −42 0 0
No entiendo nada.
5. Calcule la forma canónica de Jordan, con una matriz de paso, así como la matriz exponencialde las matrices
A =
2 0 0 00 2 0 00 1 2 0−1 1 0 2
, B =
1 1 −10 3 10 0 1
.El polinomio característico de la matriz A es:
p(λ) = |A− λI4| =
∣∣∣∣∣∣∣∣2− λ 0 0 0
0 2− λ 0 00 1 2− λ 0−1 1 0 2− λ
∣∣∣∣∣∣∣∣ = (2− λ)4
que se calcula fácilmente porque la matriz es triangular. El único autovalor es λ = 2 con multiplicidadalgebraica 4 y la multiplicidad geométrica o la dimensión del espacio propio es
mg(2) = dim(P2) = dim(R4)− rang(A− 2I4) = 4− rang
0 0 0 00 0 0 00 1 0 0−1 1 0 0
= 4− 2 = 2
Como la multiplicidad geométrica no coincide con la algebraica, la matriz A no es diagonalizable. Elpolinomio mínimo divide al característico, aunque no puede ser (2 − λ) ni (λ − 2), ya que entoncessería diagonalizable. Entonces las posibilidades son (2 − λ)2, (2 − λ)3 o (2 − λ)4 que es el propiopolinomio característico. Hacemos el cálculo
(A− 2I4)2 =
0 0 0 00 0 0 00 1 0 0−1 1 0 0
2
=
0 0 0 00 0 0 00 0 0 00 0 0 0
y entonces el polinomio mínimo es m(λ) = (2 − λ)2. Ahora, recordando que el número de bloqueselementales de Jordan asociados a un autovalor coincide con su multiplicidad geométrica, podríamos
98 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
pensar que la forma canónica de Jordan de A es2 1 0 00 2 0 00 0 2 10 0 0 2
pero sin embargo en la matriz
2 1 0 00 2 1 00 0 2 00 0 0 2
también aparecen dos blosques elementales asociados a
la raíz 2. Por tanto, conocer la multiplicidad geométrica y el polinomio característico no es suficientepara hallar la forma canónica de Jordan. Teniendo en cuenta los polinomios característico y mínimotenemos que las dos posibilidades para la forma canónica de Jordan de A son:
2 1 0 00 2 0 00 0 2 00 0 0 2
o bien
2 1 0 00 2 0 00 0 2 10 0 0 2
¿por qué?
Y así, la forma canónica de Jordan de A es
J =
2 1 0 00 2 0 00 0 2 10 0 0 2
Si solo hubiesemos tenido en cuenta el dato del polinomio característico y el polinomio mínimonecesitaríamos de alguna información adicional para elegir entre estas dos posibilidades: el rango dela matriz (A − 2I4). Como tenemos que rang(A − 2I4) = rang(J − 2I4), y además ya hemos vistoque rang(A− 2I4) = 2, entonces tenemos que rang(J − 2I4) = 2. Entonces veamos el rango de lasdos matrices para ver cual es la de rango 2:
2 1 0 00 2 0 00 0 2 00 0 0 2
−
2 0 0 00 2 0 00 0 2 00 0 0 2
=
0 1 0 00 0 0 00 0 0 00 0 0 0
⇒ rang = 1
2 1 0 00 2 0 00 0 2 10 0 0 2
−
2 0 0 00 2 0 00 0 2 00 0 0 2
=
0 1 0 00 0 0 00 0 0 10 0 0 0
⇒ rang = 2
Y entonces llegamos igualmente a la conclusión de que, como la segunda matriz es la que cumple querang(J − 2I4) = 2, esa debe ser la forma canónica de Jordan. Calculamos ahora la matriz de paso P .Comenzamos calculando la cadena de inclusiones de núcleos:
{0} =⊂ Ker(A− 2I4) ⊂ Ker(A− 2I4)2 = R4

2.8. EJERCICIOS DEL TEMA 2 99
Calculamos ahora las relaciones entre los vectores de la nueva base:
J = P−1AP ⇒ PJ = AP ⇒ (~v1|~v2|~v3|~v4)
2 1 0 00 2 0 00 0 2 10 0 0 2
= A(~v1|~v2|~v3|~v4)
y entonces2~v1 = A~v1
~v1 + 2~v2 = A~v22~v3 = A~v3
~v3 + 2~v4 = A~v4
⇒
(A− 2I4)~v1 = 0(A− 2I4)~v2 = ~v1(A− 2I4)~v3 = 0(A− 2I4)~v4 = ~v3
Por lo que tenemos que:
~v1, ~v3 ∈ Ker(A− 2I4); ~v2, ~v4 ∈ Ker(A− 2I4)2 \Ker(A− 2I4)
Como Ker(A − 2I4)2 = R4, los vectores ~v2 y ~v4 pueden ser cualesquiera con la única condición de
que no pertenezcan al núcleo de A− 2I4. Determinamos dicho núcleo:
Ker(A− 2I4) =
0 0 0 00 0 0 00 1 0 0−1 1 0 0
xyzt
=
0000
⇒ {y = 0−x+ y = 0
⇒
x = 0y = 0z = αt = β
Entonces, tenemos que Ker(A− 2I4) = 〈(0, 0, 1, 0), (0, 0, 0,1)〉. Tomemos entonces ~v2 := (1, 0, 0, 0)y así ~v2 6= Ker(A− 2I4). Para obtener ~v1 hacemos simplemente:
~v1 := (A− 2I4)~v2 =
0 0 0 00 0 0 00 1 0 0−1 1 0 0
1000
=
000−1
Observamos que ~v1 pertenece a Ker(A− 2I4). Tomamos ahora ~v4 linealmente independiente de ~v2, yasí ~v4 := (0, 1, 0, 0) que tampoco pertencece al núcleo de A− 2I4. Entonces:
~v3 := (A− 2I4)~v4 =
0 0 0 00 0 0 00 1 0 0−1 1 0 0
0100
=
0011
que también está en el núcleo de A− 2I4. Entonces tenemos que P =
0 1 0 00 0 0 10 0 1 0−1 0 1 0
.
Calculamos ahora la matriz exponencial de A. Tenemos que si A = PJP−1, entonces eA = PeJP−1.Por tanto, conocida la exponencial de la forma canónica de Jordan, solo resta multiplicar por P y P−1
para obtener la de A. La forma canónica de Jordan de la matriz A tiene dos bloques elementales deJordan de orden dos iguales. Calculemos su matriz exponencial:
e
2 10 2
= e2
(1 10 1
)=
(e2 e2
e2 e2
)
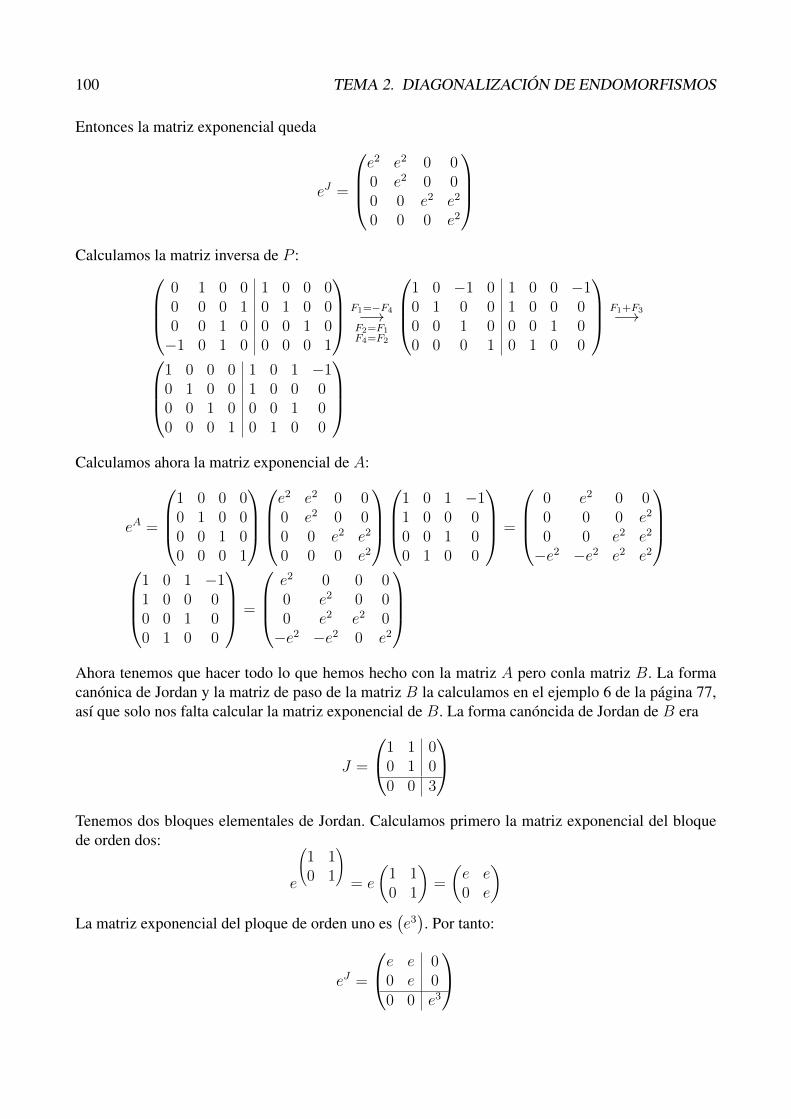
100 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Entonces la matriz exponencial queda
eJ =
e2 e2 0 00 e2 0 00 0 e2 e2
0 0 0 e2
Calculamos la matriz inversa de P :
0 1 0 0 1 0 0 00 0 0 1 0 1 0 00 0 1 0 0 0 1 0−1 0 1 0 0 0 0 1
F1=−F4−→F2=F1F4=F2
1 0 −1 0 1 0 0 −10 1 0 0 1 0 0 00 0 1 0 0 0 1 00 0 0 1 0 1 0 0
F1+F3−→
1 0 0 0 1 0 1 −10 1 0 0 1 0 0 00 0 1 0 0 0 1 00 0 0 1 0 1 0 0
Calculamos ahora la matriz exponencial de A:
eA =
1 0 0 00 1 0 00 0 1 00 0 0 1
e2 e2 0 00 e2 0 00 0 e2 e2
0 0 0 e2
1 0 1 −11 0 0 00 0 1 00 1 0 0
=
0 e2 0 00 0 0 e2
0 0 e2 e2
−e2 −e2 e2 e2
1 0 1 −11 0 0 00 0 1 00 1 0 0
=
e2 0 0 00 e2 0 00 e2 e2 0−e2 −e2 0 e2
Ahora tenemos que hacer todo lo que hemos hecho con la matriz A pero conla matriz B. La formacanónica de Jordan y la matriz de paso de la matriz B la calculamos en el ejemplo 6 de la página 77,así que solo nos falta calcular la matriz exponencial de B. La forma canóncida de Jordan de B era
J =
1 1 00 1 00 0 3
Tenemos dos bloques elementales de Jordan. Calculamos primero la matriz exponencial del bloquede orden dos:
e
1 10 1
= e
(1 10 1
)=
(e e0 e
)La matriz exponencial del ploque de orden uno es
(e3). Por tanto:
eJ =
e e 00 e 00 0 e3

2.8. EJERCICIOS DEL TEMA 2 101
Calculamos ahora la matriz exponencial de B:
eA =1
12
3 0 10 1 20 −2 0
e e 00 e 00 0 e3
4 −2 −10 0 −60 6 3
=1
12
3e 3e e3
0 e 2e3
0 −2e 0
4 −2 −10 0 −60 6 3
=
=1
12
12e −6e+ 6e3 −3e− 18e+ 3e3
0 12e3 −6e+ 6e3
0 0 12e
=
e −12e+ 1
2e3 −21
12e+ 1
4e3
0 e3 −12e+ 1
2e3
0 0 e
=
=
e 12(−e+ e3) 1
4(−7e+ e3)
0 e3 12(−e+ e3)
0 0 e
6. Sea B = {e1, e2, e3, e4, e5} una base deR5 y f un endomorfismo con f(e2) = −e2, f(e3 + e4) = e3 + e4
y f(e5) = 2e5 + e1 − e2. El polinomio característico de f tiene la raíz triple 2. Las ecuacionesimplícitas respecto de la base B del núcleo del endomorfismo f − 2Id son x1 + x2 + x3 = 0,x3 + x4 = 0 y x5 = 0. Calcule la matriz de f con respecto a la base B, su forma canónica deJordan y una matriz de paso P .Como f(e2) = −e2, podemos afirmar que −1 es un valor propio de f con e2 como vector propioasociado. De igual modo, f(e3 + e4) = e3 + e4 permite afirmar que 1 es un valor propio con vectorpropio asociado e3 + e4. A partir de las ecuaciones implícitas del subespacio Ker(f − 2Id) podemosdeterminar una base de este. De este modo, tenemos
Ker(f − 2Id) =
x1 + x2 + x3 = 0x3 + x4x5 = 0
⇒
x3 = −x1 − x2x4 = x1 + x2x5 = 0
⇒
x1 = αx2 = βx3 = −α− βx4 = α + βx5 = 0
Ker(f − 2Id) = {(1, 0,−1, 1, 0), (0, 1,−1, 1, 0)} Como entonces dim(Ker(f − 2Id)) = 2 se tieneque la multiplicidad geométrica de 2 es 2, que no coincide con 3, que es la multiplicidad algebraicatal y como dice el enunciado. Podemos afirmar entonces que f no es diagonalizable. Como las raícesdel polinomio característico son −1 y 1 simples, y 2 triple, aparecen seguro dos bloques elementalesde orden uno asociados cada uno a −1 y 1 respectivamente, y uno también de orden uno asociadoa 2, ya que el número de bloques elementales de Jordan asociados al autovalor 2 coincide con sumultiplicidad geométrica que es 2, por lo que un bloque tiene que ser de orden uno y el otro de ordendos. Por tanto
J =
2 1 0 0 00 2 0 0 00 0 2 0 00 0 0 −1 00 0 0 0 1
Si llamamos A = MB(f), tenemos que J = P−1AP . Para calcular A usaremos las tres ecuacionesque nos dan en el enunciado
f(e2) = −e2f(e3) + f(e4) = e3 + e4
f(e5) = 2e5 + e1 − e2

102 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
donde hemos tenido en cuenta que f es lineal. A estas ecuaciones tenemos que añadir dos más. Losvectores de la base del núcleo de f − 2Id que hemos determinado son e1 − e3 + e4 y e2 − e3 + e4 yverifican que (f − 2Id)(x) = 0⇒ f(x) = 2x. Por tanto, las ecuaciones que conseguimos son:
f(e1)− f(e3) + f(e4) = 2e1 − 2e3 + 2e4, f(e2)− f(e3) + f(e4) = 2e2 − 2e3 + 2e4
Resolvemos el sistema:0 1 0 0 0 0 −1 0 0 00 0 1 1 0 0 0 1 1 00 0 0 0 1 1 −1 0 0 21 0 −1 1 0 2 0 −2 2 00 1 −1 1 0 0 2 −2 2 0
F1=F4−→F2=F1F3=F2F4=F5−F1F5=F3
1 0 −1 1 0 2 0 −2 2 00 1 0 0 0 0 −1 0 0 00 0 1 1 0 0 0 1 1 00 0 −1 1 0 0 3 −2 2 00 0 0 0 1 1 −1 0 0 2
F1+F3−→F4+F3
1 0 0 2 0 2 0 −1 3 00 1 0 0 0 0 −1 0 0 00 0 1 1 0 0 0 1 1 00 0 0 2 0 0 3 −1 3 00 0 0 0 1 1 −1 0 0 2
F1−F4−→F3− 1
2F4
12F4
1 0 0 0 0 2 −3 0 0 00 1 0 0 0 0 −1 0 0 00 0 1 0 0 0 −3/2 3/2 −1/2 00 0 0 1 0 0 3/2 −1/2 3/2 00 0 0 0 1 1 −1 0 0 2
Entonces tenemos que:
f(e1) = 2e1 − e2f(e2) = −e2
f(e3) = −3
2e2 +
3
2e3 −
1
2e4
f(e4) =3
2e2 −
1
2e3 +
3
2e4
f(e5) = e1 − e2 + 2e5
Así, la matriz de f en la base B de R5 es
A =
2 0 0 0 1−3 −1 −3/2 3/2 −10 0 3/2 −1/2 00 0 −1/2 3/2 00 0 0 0 2
Solo nos falta calcular una matriz de paso P . Como J = P−1AP , se tiene que PJ = AP :
(~v1|~v2|~v3|~v4|~v5)
2 1 0 0 00 2 0 0 00 0 2 0 00 0 0 −1 00 0 0 0 1
= A(~v1|~v2|~v3|~v4|~v5)
Multiplicando llegamos a
2~v1 = A~v1~v1 + 2~v2 = A~v2
2~v3 = A~v3~v4 = A~v4~v5 = A~v5
⇒
(A− 2I5)~v1 = 0(A− 2I5)~v2 = ~v1(A− 2I5)~v3 = 0(A+ I5)~v4 = 0(A− I5)~v5 = 0
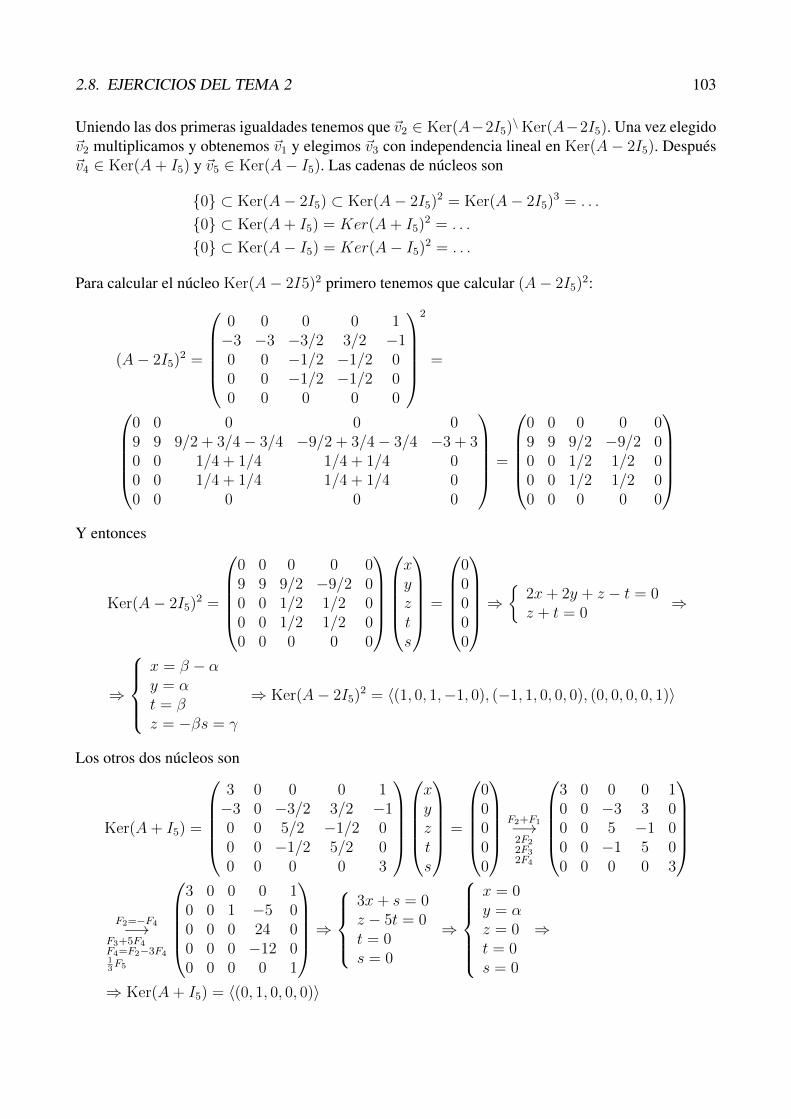
2.8. EJERCICIOS DEL TEMA 2 103
Uniendo las dos primeras igualdades tenemos que ~v2 ∈ Ker(A−2I5)\Ker(A−2I5). Una vez elegido
~v2 multiplicamos y obtenemos ~v1 y elegimos ~v3 con independencia lineal en Ker(A− 2I5). Después~v4 ∈ Ker(A+ I5) y ~v5 ∈ Ker(A− I5). Las cadenas de núcleos son
{0} ⊂ Ker(A− 2I5) ⊂ Ker(A− 2I5)2 = Ker(A− 2I5)
3 = . . .
{0} ⊂ Ker(A+ I5) = Ker(A+ I5)2 = . . .
{0} ⊂ Ker(A− I5) = Ker(A− I5)2 = . . .
Para calcular el núcleo Ker(A− 2I5)2 primero tenemos que calcular (A− 2I5)2:
(A− 2I5)2 =
0 0 0 0 1−3 −3 −3/2 3/2 −10 0 −1/2 −1/2 00 0 −1/2 −1/2 00 0 0 0 0
2
=
0 0 0 0 09 9 9/2 + 3/4− 3/4 −9/2 + 3/4− 3/4 −3 + 30 0 1/4 + 1/4 1/4 + 1/4 00 0 1/4 + 1/4 1/4 + 1/4 00 0 0 0 0
=
0 0 0 0 09 9 9/2 −9/2 00 0 1/2 1/2 00 0 1/2 1/2 00 0 0 0 0
Y entonces
Ker(A− 2I5)2 =
0 0 0 0 09 9 9/2 −9/2 00 0 1/2 1/2 00 0 1/2 1/2 00 0 0 0 0
xyzts
=
00000
⇒{
2x+ 2y + z − t = 0z + t = 0
⇒
⇒
x = β − αy = αt = βz = −βs = γ
⇒ Ker(A− 2I5)2 = 〈(1, 0, 1,−1, 0), (−1, 1, 0, 0, 0), (0, 0, 0, 0, 1)〉
Los otros dos núcleos son
Ker(A+ I5) =
3 0 0 0 1−3 0 −3/2 3/2 −10 0 5/2 −1/2 00 0 −1/2 5/2 00 0 0 0 3
xyzts
=
00000
F2+F1−→2F22F32F4
3 0 0 0 10 0 −3 3 00 0 5 −1 00 0 −1 5 00 0 0 0 3
F2=−F4−→F3+5F4F4=F2−3F413F5
3 0 0 0 10 0 1 −5 00 0 0 24 00 0 0 −12 00 0 0 0 1
⇒
3x+ s = 0z − 5t = 0t = 0s = 0
⇒
x = 0y = αz = 0t = 0s = 0
⇒
⇒ Ker(A+ I5) = 〈(0, 1, 0, 0, 0)〉

104 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
y
Ker(A− I5) =
1 0 0 0 1−3 −2 −3/2 3/2 −10 0 1/2 −1/2 00 0 −1/2 1/2 00 0 0 0 1
xyzts
=
00000
F2+3F1−→2F22F32F4
1 0 0 0 10 −4 −3 3 40 0 1 −1 00 0 −1 1 00 0 0 0 1
F1−F5−→F2−4F5F2+3F3F4+F3
1 0 0 0 00 −4 0 0 00 0 1 −1 00 0 0 0 00 0 0 0 1
⇒
x = 0−4y = 0z − t = 0s = 0
⇒
x = 0y = 0z = αt = αs = 0
⇒ Ker(A− I5) = 〈(0, 0, 1, 1, 0)〉
A la vista de las condiciones que hemos deducido, definimos ~v2 := (0, 0, 0, 0, 1) para tener:
~v1 := (A− 2I5)~v2 =
0 0 0 0 1−3 −3 −3/2 3/2 −10 0 −1/2 −1/2 00 0 −1/2 −1/2 00 0 0 0 0
00001
=
1−1000
Tenemos que ver si ~v1 pertenece a Ker(A−2I5). Como tenemos que (1, 0,−1, 1, 0)−(0, 1,−1, 1, 0) =(1,−1, 0, 0, 0), ~v1 pertenece a Ker(A − 2I5) como tiene que ser. Tomamos entonces en este núcleo~v3 := (1, 0,−1, 1, 0) que no depende de ~v1. Ya sólo nos falta definir ~v4 := (0, 1, 0, 0, 0) y ~v5 :=(0, 0, 1, 1, 0) para tener la nueva base
B = {(1,−1, 0, 0, 0), (0, 0, 0, 0, 1), (1, 0,−1, 1, 0), (0, 1, 0, 0, 0), (0, 0, 1, 1, 0)}
o lo que es lo mismo
B = {e1 − e2, e5, e1 − e3 + e4, e2, e3 + e4}
con matriz P asociada dada por P =
1 0 1 0 0−1 0 0 1 00 0 −1 0 10 0 1 0 10 1 0 0 0
.
7. Encuentre, usando la forma canónica de Jordan, una expresión para las potencias An de lamatriz
A =1
2
1 0 0 −10 2 0 41 4 −2 91 0 0 3

2.8. EJERCICIOS DEL TEMA 2 105
Calculamos el polinomio característico:
p(λ) = |A− λI4| =
∣∣∣∣∣∣∣∣1/2− λ 0 0 −1/2
0 1− λ 0 21/2 2 −1− λ 9/21/2 0 0 3/2− λ
∣∣∣∣∣∣∣∣ = (−1− λ)
∣∣∣∣∣∣1/2− λ 0 −1/2
0 1− λ 21/2 0 3/2− λ
∣∣∣∣∣∣ =
= (−1− λ)(1− λ)
∣∣∣∣1/2− λ −1/21/2 3/2− λ
∣∣∣∣ =1
4(−1− λ)(1− λ)
∣∣∣∣1− 2λ −11 3− 2λ
∣∣∣∣ =1
4(−1− λ)(1− λ)
[(1− 2λ)(3− 2λ) + 1] =1
4(−1− λ)(1− λ)(3− 8λ+ 4λ2 + 1) =
1
4(−1− λ)(1− λ)(4λ2 − 8λ+ 4)
Igualando a cero obtenemos la ecuación característica p(λ) = (1 − λ)(1 + λ)(λ2 − 2λ + 1) = 0.Calculamos las raíces:
λ =2±√
4− 4
2= 1
Por tanto, las raíces son λ1 = −1, simple, y λ2 = 1, triple. La multiplicidad algebraica de 1 es
mg(1) = dim(P1) = dim(R4)− rang(A− I4) = 4− rang
−1/2 0 0 −1/2
0 0 0 21/2 2 −2 9/21/2 0 0 1/2
= 4− 3 = 1
Como la multiplicidad algebraica de 1 no coincide con la multiplicidad geométrica, la matriz no esdiagonalizable. Entonces, como el número de bloques elementales de Jordan coincide con la multipli-cidad geométrica. El número de bloques para el autovalor 1 es 1, y entonces el bloque será de orden3. Lo verificamos calculando el polinomio mínimo. El polinomio mínimo puede ser (λ + 1)(λ− 1)2
o (λ + 1)(λ − 1)3, ya que si fuese (λ + 1)(λ − 1) la matriz sería diagonalizable y acabamos de verque no lo es. Hacemos los cálculos para ver cuál es el polinomio mínimo:
(A+ I4)(A− I4)2 =
3/2 0 0 −1/20 2 0 2
1/2 2 0 9/21/2 0 0 5/2
−1/2 0 0 −1/2
0 0 0 21/2 2 −2 9/21/2 0 0 1/2
2
=
3/2 0 0 −1/20 2 0 2
1/2 2 0 9/21/2 0 0 5/2
1/4− 1/4 0 0 1/4− 1/41 0 0 1
−1/4− 1 + 9/4 −4 4 −1/4 + 4− 9 + 9/4−1/4 + 1/4 0 0 −1/4 + 1/4
=
=
3/2 0 0 −1/20 2 0 2
1/2 2 0 9/21/2 0 0 5/2
0 0 0 01 0 0 11 −4 4 −30 0 0 0
=
0 0 0 02 0 0 22 0 0 20 0 0 0

106 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Como (λ+ 1)(λ− 1)2 no es el polinomio mínimo, este debe ser (λ+ 1)(λ− 1)3. Lo comprobamos:
(A+ I4)(A− I4)3 =
0 0 0 02 0 0 22 0 0 20 0 0 0
−1/2 0 0 −1/2
0 0 0 21/2 2 −2 9/21/2 0 0 1/2
=
0 0 0 0
−1 + 1 0 0 −1 + 1−1 + 1 0 0 −1 + 1
0 0 0 0
=
0 0 0 00 0 0 00 0 0 00 0 0 0
Por tanto la forma canónica de Jordan de la matriz A es:
J =
−1 0 0 00 1 1 00 0 1 10 0 0 1
Calculamos ahora una matriz de paso P tal que J = P−1AP ⇒ PJ = AP .
(~v1|~v2|~v3|~v4)
−1 0 0 00 1 1 00 0 1 10 0 0 1
= A(~v1|~v2|~v3|~v4)
−~v1 = A~v1~v2 = A~v2
~v2 + ~v3 = A~v3~v3 + ~v4 = A~v4
⇒
(A+ I4)~v1 = 0(A− I4)~v2 = 0(A− I4)~v3 = ~v2(A− I4)~v4 = ~v3
De aquí tenemos que ~v4 ∈ Ker(A− I4)3 \Ker(A− I4)2 y ~v1 ∈ Ker(A+ I4). Las cadenas de núcleosson
{0} ⊂ Ker(A+ I4) = Ker(A+ I4)2 = . . .
{0} ⊂ Ker(A− I4) ⊂ Ker(A− I4)2 ⊂ Ker(A− I4)3 = Ker(A− I4)4 = . . .
Determinamos los núcleos que aparecen en estas cadenas:
Ker(A+ I4) =
3/2 0 0 −1/20 2 0 2
1/2 2 0 9/21/2 0 0 5/2
xyzt
=
0000
F1=2F4−→2F3F4=2F1
1 0 0 50 2 0 21 4 0 93 0 0 −1
F3−F1−→F4−4F1
1 0 0 50 2 0 20 4 0 40 0 0 −16
⇒
x+ 5t = 02y + 2t = 0−16t = 0
⇒
x = 0y = 0z = αt = 0
⇒ Ker(A+ I4) = 〈(0, 0, 1, 0)〉

2.8. EJERCICIOS DEL TEMA 2 107
Ker(A− I4) =
−1/2 0 0 −1/2
0 0 0 21/2 2 −2 9/21/2 0 0 1/2
xyzt
=
0000
2F1−→2F32F4
−1 0 0 −10 0 0 21 2 −2 91 0 0 1
F3+F1−→F4+F1
−1 0 0 −10 0 0 20 2 −2 80 0 0 0
⇒−x− t = 02t = 02y − 2z + 8t = 0
⇒
x = 0y = αz = αt = 0
⇒ Ker(A− I4) = 〈(0, 1, 1, 0)〉
Ker(A− I4)2 =
0 0 0 01 0 0 11 −4 4 −30 0 0 0
xyzt
=
0000
⇒ {x+ t = 0x− 4y + 4z − 3t = 0
⇒
⇒{x = −t4y = 4z − 4t
⇒{x = −ty = z − t ⇒
x = −αy = β − αz = βt = α
⇒
⇒ Ker(A− I4)2 = 〈(−1,−1, 0, 1), (0, 1, 1, 0)〉
Para calcular Ker(A− I4)3 primero tenemos que calcular (A− I4)3:
(A− I4)3 =
0 0 0 01 0 0 11 −4 4 −30 0 0 0
−1/2 0 0 −1/2
0 0 0 21/2 2 −2 9/21/2 0 0 1/2
=
=
0 0 0 0
−1/2 + 1/2 0 0 −1/2 + 1/2−1/2 + 4/2− 3/2 8 −8 −1/2− 8 + 36/2− 3/2
0 0 0 0
=
0 0 0 00 0 0 00 8 −8 80 0 0 0
Calculamos ahora Ker(A− I4)3:
Ker(A− I4)3 =
0 0 0 00 0 0 00 8 −8 80 0 0 0
xyzt
=
0000
⇒ y − z + t = 0⇒ y = z − t⇒
⇒
x = γy = β − αz = βt = α
⇒ Ker(A− I4)2 = 〈(0,−1, 0, 1), (0, 1, 1, 0), (1, 0, 0, 0)〉
Elegimos ~v4 := (1, 0, 0, 0) y tenemos:
~v3 := (A− I4)~v4 =
−1/2 0 0 −1/2
0 0 0 21/2 2 −2 9/21/2 0 0 1/2
1000
=
−1/2
01/21/2

108 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
~v3 ∈ Ker(A− I4)2 ya que 12(−1,−1, 0, 1) + 1
2(0, 1, 1, 0) = (−1
2, 0, 1
2, 12).
~v2 := (A− I4)~v4 =
−1/2 0 0 −1/2
0 0 0 21/2 2 −2 9/21/2 0 0 1/2
−1/2
01/21/2
=
1/4− 1/4
1−1/4− 1 + 9/4−1/4 + 1/4
=
0110
~v2 pertenece al Ker(A − I4) porque es incluso el vector que forma su base. Solo nos falta definir~v1 := (0, 0, 1, 0). Y entonces la matriz de paso es:
P =
0 0 −1/2 10 1 0 01 1 1/2 00 0 1/2 0
Calculamos la inversa de la matriz P :
0 0 −1/2 1 1 0 0 00 1 0 0 0 1 0 01 1 1/2 0 0 0 1 00 0 1/2 0 0 0 0 1
F1=F3−→F3=F4F4=F1
1 1 1/2 0 0 0 1 00 1 0 0 0 1 0 00 0 1/2 0 0 0 0 10 0 −1/2 1 1 0 0 0
F1−F2−F3−→2F3F4+F3
1 0 0 0 0 −1 1 −10 1 0 0 0 1 0 00 0 1 0 0 0 0 20 0 0 1 1 0 0 1
Antes de calcular An tenemos que calcular Jn. Probaremos haciendo J2 ya que la matriz es casidiagonal y es posible que sea nilpotente o idempotente. Una matriz A ∈Mn(K) se dice nilpotente siexiste k ∈ N tal que Ak = 0. Una matriz idempotente es una matriz la cual es igual a su cuadrado.
J2 =
−1 0 0 00 1 1 00 0 1 10 0 0 1
2
=
1 0 0 00 1 2 10 0 1 20 0 0 1
Con una sola potencia no sacamos nada en claro.
J3 =
1 0 0 00 1 2 10 0 1 20 0 0 1
−1 0 0 00 1 1 00 0 1 10 0 0 1
=
−1 0 0 00 1 3 30 0 1 30 0 0 1
Si nos fijamos, vemos que el elemento a11 cambia de signo según si la potencia es par o impar, loselementos a22, a33 y a44 siempre valen 1, los elementos a23 y a43 se incrementan en una unidad concada potencia por tanto tienen el valor n de la potencia, el elemento a24 de la potencia Jn es la sumade los elementos a23 y a24 de la potencia Jn−1 (¿cómo se puede expresar este elemento?). Ahoracalculamos An:
An = PJnP−1 =
0 0 −1/2 10 1 0 01 1 1/2 00 0 1/2 0
(−1)n 0 0 00 1 n ?0 0 1 n0 0 0 1
0 −1 1 −10 1 0 00 0 0 21 0 0 1
=
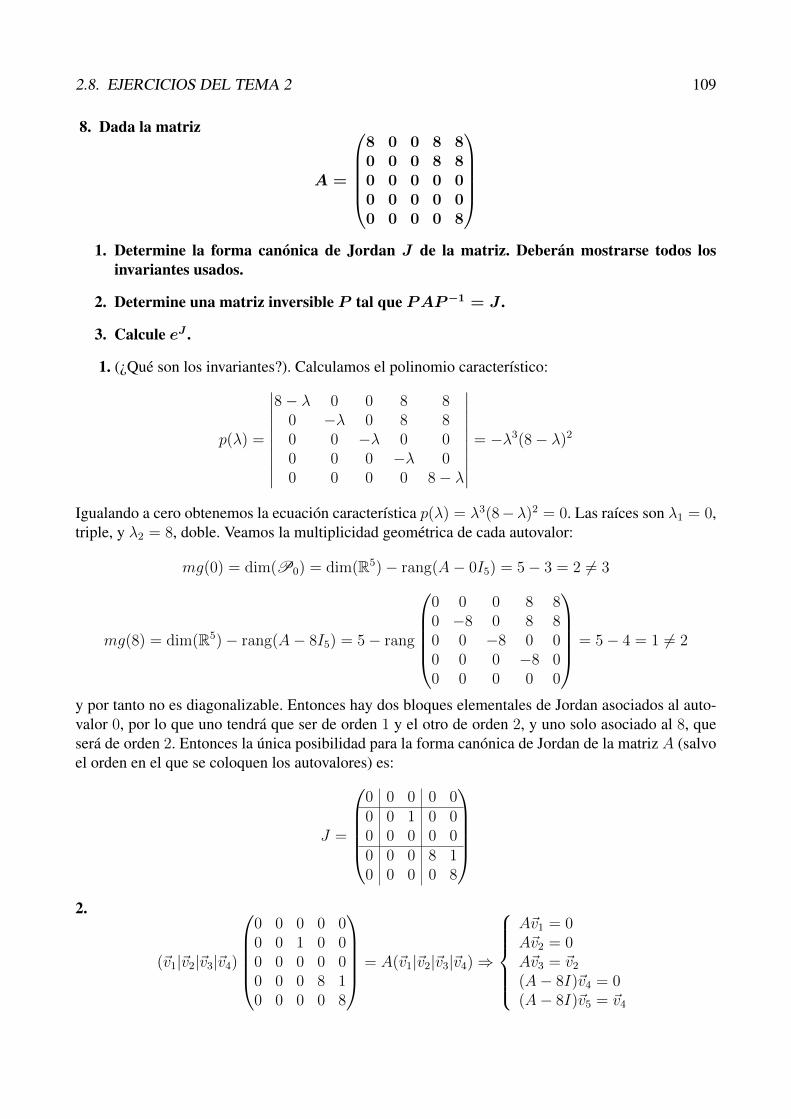
2.8. EJERCICIOS DEL TEMA 2 109
8. Dada la matriz
A =
8 0 0 8 80 0 0 8 80 0 0 0 00 0 0 0 00 0 0 0 8
1. Determine la forma canónica de Jordan J de la matriz. Deberán mostrarse todos los
invariantes usados.
2. Determine una matriz inversible P tal que PAP−1 = J .
3. Calcule eJ .
1. (¿Qué son los invariantes?). Calculamos el polinomio característico:
p(λ) =
∣∣∣∣∣∣∣∣∣∣8− λ 0 0 8 8
0 −λ 0 8 80 0 −λ 0 00 0 0 −λ 00 0 0 0 8− λ
∣∣∣∣∣∣∣∣∣∣= −λ3(8− λ)2
Igualando a cero obtenemos la ecuación característica p(λ) = λ3(8−λ)2 = 0. Las raíces son λ1 = 0,triple, y λ2 = 8, doble. Veamos la multiplicidad geométrica de cada autovalor:
mg(0) = dim(P0) = dim(R5)− rang(A− 0I5) = 5− 3 = 2 6= 3
mg(8) = dim(R5)− rang(A− 8I5) = 5− rang
0 0 0 8 80 −8 0 8 80 0 −8 0 00 0 0 −8 00 0 0 0 0
= 5− 4 = 1 6= 2
y por tanto no es diagonalizable. Entonces hay dos bloques elementales de Jordan asociados al auto-valor 0, por lo que uno tendrá que ser de orden 1 y el otro de orden 2, y uno solo asociado al 8, queserá de orden 2. Entonces la única posibilidad para la forma canónica de Jordan de la matriz A (salvoel orden en el que se coloquen los autovalores) es:
J =
0 0 0 0 00 0 1 0 00 0 0 0 00 0 0 8 10 0 0 0 8
2.
(~v1|~v2|~v3|~v4)
0 0 0 0 00 0 1 0 00 0 0 0 00 0 0 8 10 0 0 0 8
= A(~v1|~v2|~v3|~v4)⇒
A~v1 = 0A~v2 = 0A~v3 = ~v2(A− 8I)~v4 = 0(A− 8I)~v5 = ~v4
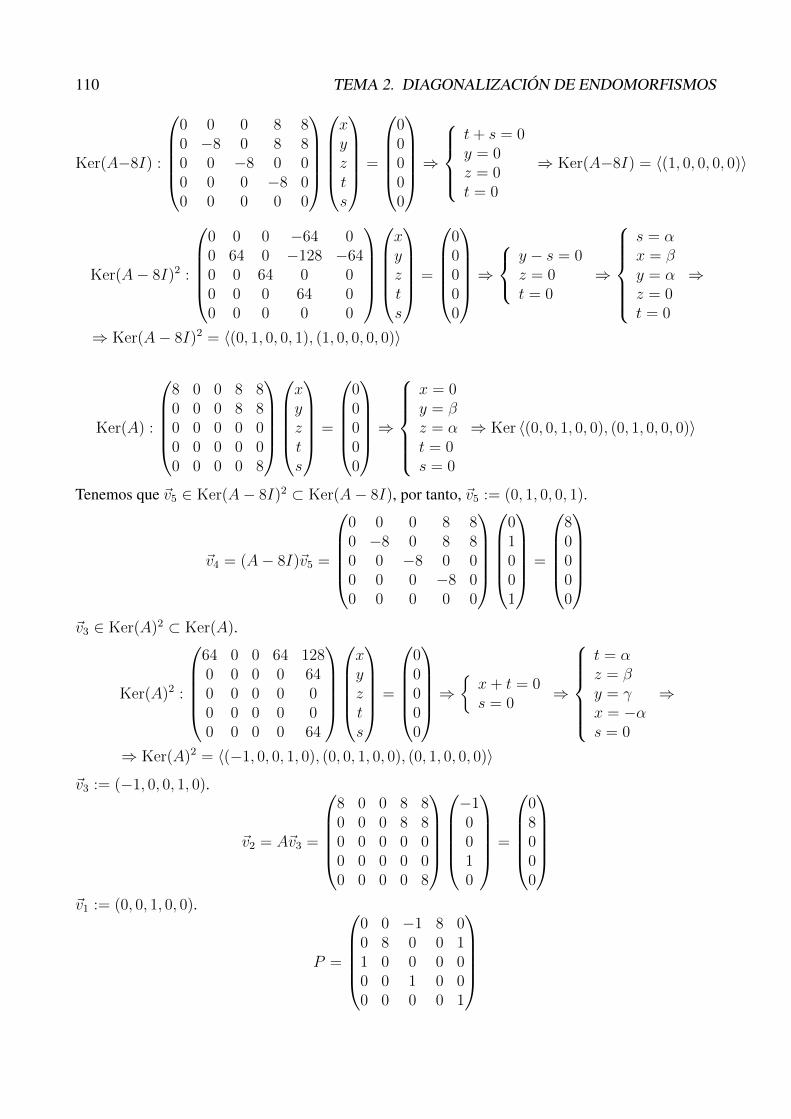
110 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Ker(A−8I) :
0 0 0 8 80 −8 0 8 80 0 −8 0 00 0 0 −8 00 0 0 0 0
xyzts
=
00000
⇒
t+ s = 0y = 0z = 0t = 0
⇒ Ker(A−8I) = 〈(1, 0, 0, 0, 0)〉
Ker(A− 8I)2 :
0 0 0 −64 00 64 0 −128 −640 0 64 0 00 0 0 64 00 0 0 0 0
xyzts
=
00000
⇒
y − s = 0z = 0t = 0
⇒
s = αx = βy = αz = 0t = 0
⇒
⇒ Ker(A− 8I)2 = 〈(0, 1, 0, 0, 1), (1, 0, 0, 0, 0)〉
Ker(A) :
8 0 0 8 80 0 0 8 80 0 0 0 00 0 0 0 00 0 0 0 8
xyzts
=
00000
⇒
x = 0y = βz = αt = 0s = 0
⇒ Ker 〈(0, 0, 1, 0, 0), (0, 1, 0, 0, 0)〉
Tenemos que ~v5 ∈ Ker(A− 8I)2 ⊂ Ker(A− 8I), por tanto, ~v5 := (0, 1, 0, 0, 1).
~v4 = (A− 8I)~v5 =
0 0 0 8 80 −8 0 8 80 0 −8 0 00 0 0 −8 00 0 0 0 0
01001
=
80000
~v3 ∈ Ker(A)2 ⊂ Ker(A).
Ker(A)2 :
64 0 0 64 1280 0 0 0 640 0 0 0 00 0 0 0 00 0 0 0 64
xyzts
=
00000
⇒{x+ t = 0s = 0
⇒
t = αz = βy = γx = −αs = 0
⇒
⇒ Ker(A)2 = 〈(−1, 0, 0, 1, 0), (0, 0, 1, 0, 0), (0, 1, 0, 0, 0)〉
~v3 := (−1, 0, 0, 1, 0).
~v2 = A~v3 =
8 0 0 8 80 0 0 8 80 0 0 0 00 0 0 0 00 0 0 0 8
−10010
=
08000
~v1 := (0, 0, 1, 0, 0).
P =
0 0 −1 8 00 8 0 0 11 0 0 0 00 0 1 0 00 0 0 0 1
2.8. EJERCICIOS DEL TEMA 2 111
3.
e
0 10 0
= e0
(1 10 1
)=
(1 10 1
); e
8 10 8
= e8
(1 10 1
)=
(e8 e8
0 e8
)
eJ =
1 0 0 0 00 1 1 0 00 0 1 0 00 0 0 e8 e8
0 0 0 0 e8

112 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
2.9. Ejercicios de examen del tema 2
1 (MAYO 2003). Determine la forma canónica de Jordan del endomorfismo deR3 dado por lascondiciones f(1, 0, 0) = 1
2(3, 0, 1), f(0, 1, 0) = (0, 2, 0) y f(0, 0, 1) = 1
2(1, 0, 3).
Tenemos en cuenta la propiedad: λ autovalor de A ⇔ kλ autovalor de kA.
A =1
2
3 0 10 4 01 0 3
; p(2λ) =
∣∣∣∣∣∣3− λ 0 1
0 4− λ 01 0 3− λ
∣∣∣∣∣∣ = (3− λ)2(4− λ)− (4− λ) =
= (4− λ)(9− 6λ+ λ2 − 1) = (4− λ)(λ2 − 6λ+ 8); 2λ =6±√
36− 32
2=
6± 2
2⇒
⇒ 2λ1 = 4, 2λ2 = 2; p(2λ) = (λ− 4)2(λ− 2)⇒ p(λ) = (λ− 2)2(λ− 1)
Comprobamos la multiplicidad geométrica del autovalor 2:
mg(2) = 3− rang
−1/2 0 1/20 0 0
1/2 0 −1/2
= 3− 1 = 2 = ma(2)
La matriz es diagonalizable y, por tanto, la forma canónica de Jordan coincide con la matriz diagonal:
J =
1 0 00 2 00 0 2
2 (ENERO 2006). Considere el endomorfismo en R3 dado por f(e1) = e1, f(e2) = ae1 + e2
y f(e3) = e1 + e2 + 2e3, donde a ∈ R y {e1, e2, e3} es la base canónica de R3.a) ¿Para qué valores del parámetro a es f diagonalizable?b) Calcule su forma canónica de Jordan para a = 1, así como eA.a)
A =
1 a 10 1 10 0 2
; p(λ) =
∣∣∣∣∣∣1− λ a 1
0 1− λ 10 0 2− λ
∣∣∣∣∣∣ = (1− λ)2(2− λ)
mg(1) = 3− rang
0 a 10 0 10 0 1
Para a 6= 0, mg(1) = 3 − 2 = 1 6= ma(1), y la matriz no es diagonalizable. Para a = 0, mg(1) =3− 1 = 2 = ma(1) y la matriz es diagonalizable ya que la multiplicidad algebraica de cada autovalorcoincide con su multiplicidad geométrica.b) Para a = 1, mg(1) = 1 por tanto tenemos una caja de Jordan asociada al autovalor 1:
J =
1 1 00 1 00 0 2
, eJ =
e e 00 e 00 0 e2

2.9. EJERCICIOS DE EXAMEN DEL TEMA 2 113
3 (ENERO 2006). Encuentre los valores de los parámetros reales α y β para los que el endo-morfismo en R3 de matriz:
A =
2α− β 1 −α+ β0 α 0
2α− 2β 2 −α+ 2β
es diagonalizable. Diagonalice en esos casos el endomorfismo y encuentre una matriz de paso.
p(λ) =
∣∣∣∣∣∣2α− β − λ 1 −α + β
0 α− λ 02α− 2β 2 −α + 2β − λ
∣∣∣∣∣∣ = (α− λ)
∣∣∣∣2α− β − λ −α + β2α− 2β −α + 2β − λ
∣∣∣∣ =
= (α− λ)
∣∣∣∣α− λ −α + βα− λ −α + 2β − λ
∣∣∣∣ = (α− λ)2∣∣∣∣1 −α + β1 −α + 2β − λ
∣∣∣∣ = (α− λ)2∣∣∣∣1 −α + β0 β − λ
∣∣∣∣ =
= (α− λ)2(β − λ)
Para α = β tenemos un solo autovalor de multiplicidad algebraica 3. Calculamos su multiplicidadgeométrica:
A =
α− λ 1 00 α− λ 00 2 α− λ
; mg(α) = 3−
0 1 00 0 00 2 0
= 3− 1 = 2 6= ma(α) = 3
La matriz no es diagonalizable para α = β. Para α 6= β:
mg(α) = 3− rang
α− β 1 −α + β0 0 0
2α− 2β 2 −2α + 2β
= 3− 1 = 2 = ma(α)
D
α 0 00 α 00 0 β
, para todo α ∈ R, β ∈ R, α 6= β.
Pα = Ker(A− αI) :
α− β 1 −α + β0 0 0
2α− 2β 2 −2α + 2β
xyz
=
000
⇒ (α− β)x = −y − (−α + β)z ⇒
⇒ x = − 1
α− βy + z ⇒
x = − 1
α−βλ+ µ
y = λz = µ
⇒Pα =
⟨(1, 0, 1),
(− 1
α− β, 1, 0
)⟩
Pβ = Ker(A− βI) :
2α− 2β 1 −α + β0 α− β 0
2α− 2β 2 −α + β
xyz
=
000
⇒⇒{
(2α− 2β)x+ y + (−α + β)z = 0⇒(α− β)y = 0
⇒
2(α− β)x = (α− β)λy = 0z = λ
⇒
x = 1
2λ
y = 0z = λ
⇒
⇒Pβ =
⟨(1
2, 0, 1
)⟩

114 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
P =
1 − 1α−β 1/2
0 1 01 0 1
4 (ENERO 2009). Sea el endomorfismo deR4 dado por f(x, y, z, t) = (t, z, y, x). Encuentre
una base en la que la matriz de f esté formada por bloques elementales de Jordan.
A =
0 0 0 10 0 1 00 1 0 01 0 0 0
; p(λ) =
∣∣∣∣∣∣∣∣−λ 0 0 10 −λ 1 00 1 −λ 01 0 0 −λ
∣∣∣∣∣∣∣∣ = −λ
∣∣∣∣∣∣−λ 1 01 −λ 00 0 −λ
∣∣∣∣∣∣− 1 ·
∣∣∣∣∣∣0 −λ 10 1 −λ1 0 0
∣∣∣∣∣∣ =
λ2∣∣∣∣−λ 1
1 −λ
∣∣∣∣− ∣∣∣∣−λ 11 −λ
∣∣∣∣ = (λ2 − 1)
∣∣∣∣−λ 11 −λ
∣∣∣∣ = (λ2 − 1)(λ2 − 1) = (λ− 1)2(λ+ 1)2
mg(1) = 4− rang
−1 0 0 10 −1 1 00 1 −1 01 0 0 −1
= 4− 2 = 2 = ma(1)
mg(−1) = 4− rang
1 0 0 10 1 1 00 1 1 01 0 0 1
= 4− 2 = 2 = ma(−1)
El endomorfismo es diagonalizable.
P1 = Ker(A− I) :
−1 0 0 10 −1 1 00 1 −1 01 0 0 −1
xyzt
=
0000
⇒ {x = ty = z
⇒
x = αy = βz = βt = α
⇒
⇒P1 = 〈(1, 0, 0, 1), (0, 1, 1, 0)〉
P2 = Ker(A+ I) :
1 0 0 10 1 1 00 1 1 01 0 0 1
xyzt
=
0000
⇒ {x = −ty = −z ⇒
x = −αy = −βz = βt = α
⇒
⇒P1 = 〈(−1, 0, 0, 1), (0,−1, 1, 0)〉
D =
−1 0 0 00 −1 0 00 0 1 00 0 0 1
; P =
−1 0 1 00 −1 0 10 1 0 11 0 1 0
La base pedida es B = {(−1, 0, 0, 1), (0,−1, 1, 0), (1, 0, 0, 1), (0, 1, 1, 0)}.

2.9. EJERCICIOS DE EXAMEN DEL TEMA 2 115
5 (MAYO 2010). Dada la matriz
A =
8 0 0 8 80 0 0 8 80 0 0 0 00 0 0 0 00 0 0 0 8
1. Determine la forma canónica de Jordan J de la matriz. Deberán mostrarse todos los
invariantes usados.
2. Determine una matriz inversible P tal que PAP−1 = J .
3. Calcule eJ .
Resuelto en el ejericicio 8 de la página 109.
6 (ENERO 2011). Analice para qué valores del parámetro real k el endomorfismo f en R3 dematriz
A =
2 0 1−k 2 −k0 0 1
en la base canónica es diagonalizable. Calcule eA cuando k = 1, dejando sin realizar la inversade la matriz de paso.
p(λ) =
∣∣∣∣∣∣2− λ 0 1−k 2− λ −k0 0 1− λ
∣∣∣∣∣∣ = (1− λ)
∣∣∣∣2− λ 0−k 2− λ
∣∣∣∣ = (1− λ)(2− λ)2
mg(2) = 3− rang
0 0 1−k 0 −k0 0 −1
Si k = 0, mg(2) = 3− 1 = 2 = ma(2). Si k 6= 0, mg(2) = 3− 2 = 1 6= ma(2) = 2. Cuando k = 1f no es diagonalizable.
J =
1 0 00 2 10 0 2
; (~v1|~v2|~v3) =
1 0 00 2 10 0 2
= A(~v1|~v2|~v3)⇒
(A− I)~v1 = 0(A− 2I)~v2 = 0(A− 2I)~v3 = ~v2
~v3 ∈ Ker(A− 2I)2 \Ker(A− 2I), ~v2 ∈ Ker(A− 2I), ~v1 ∈ Ker(A− I).
Ker(A− 2I) :
0 0 1−1 0 −10 0 −1
xyz
=
000
⇒ {z = 0x = 0
⇒ Ker(A− 2I) = 〈(0, 1, 0)〉
Ker(A− 2I)2 :
0 0 −10 0 00 0 1
xyz
=
000
⇒ z = 0⇒ Ker(A− 2I)2 = 〈(0, 1, 0), (1, 0, 0)〉

116 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS
Ker(A− I) :
1 0 1−1 1 −10 0 0
xyz
=
000
⇒ {x+ z = 0y = 0
⇒ Ker(A− I) = 〈(−1, 0, 1)〉
~v3 := (1, 0, 0).
~v2 := (A− 2I)~v3 =
0 0 1−1 0 −10 0 −1
100
~v1 := (−1, 0, 1).
P =
−1 0 10 −1 01 0 0
; e
2 10 2
= e2
(1 10 1
)
eA = PeJP−1 =
−1 0 10 −1 01 0 0
e 0 00 e2 e2
0 0 e2
−1 0 10 −1 01 0 0
−1
7 (SEPTIEMBRE 2011). Dada la matriz:
A =
0 −4 0 −10 2 0 00 0 0 04 8 −12 4
a) Determine la forma canónica de Jordan J de la matriz.b) Determine una matriz inversible P tal que PAP−1 = J .c) Calcule eJ .a)
p(λ) =
∣∣∣∣∣∣∣∣−λ −4 0 −10 2− λ 0 00 0 −λ 04 8 −12 4− λ
∣∣∣∣∣∣∣∣ = (2− λ)
∣∣∣∣∣∣−λ −4 −10 −λ 04 −12 4− λ
∣∣∣∣∣∣ =
= −λ(2− λ)
∣∣∣∣−λ −14 4− λ
∣∣∣∣ = −λ(2− λ)(−4λ+ λ2 + 4); λ =4±√
16− 16
2= 2; p(λ) = λ(λ− 2)3
mg(2) = 4− rang
∣∣∣∣∣∣∣∣−2 −4 0 −10 0 0 00 0 −2 04 8 −12 2
∣∣∣∣∣∣∣∣ = 4− 2 = 2 6= ma(2) = 3
J =
0 0 0 00 2 1 00 0 2 00 0 0 2
2.9. EJERCICIOS DE EXAMEN DEL TEMA 2 117
b)
(~v1|~v2|~v3|~v4)
0 0 0 00 2 1 00 0 2 00 0 0 2
= A(~v1|~v2|~v3|~v4)⇒
(A− 0I)~v1 = 0(A− 2I)~v2 = 0(A− 2I)~v3 = ~v2(A− 2I)~v4 = 0
Ker(A− 2I) :
−2 −4 0 −10 0 0 00 0 −2 04 8 −12 2
xyzt
=
0000
⇒ {2x+ 4y + t = 0z = 0
⇒
t = 2αy = βx = −α− 2βz = 0
⇒
⇒ Ker(A− 2I) = 〈(−1, 0, 0, 2), (−2, 1, 0, 0)〉
Ker(A− 2I)2 :
0 0 12 00 0 0 00 0 4 00 0 0 0
xyzt
=
0000
⇒ z = 0⇒
t = αy = βx = γz = 0
⇒
⇒ Ker(A− 2I)2 = 〈(0, 0, 0, 1), (0, 1, 0, 0), (1, 0, 0, 0)〉
Ker(A− 0I) :
0 −4 0 −10 2 0 00 0 0 04 8 −12 4
xyzt
=
0000
⇒
t = 0y = 0x = 3z
⇒ Ker(A− 0I) = 〈(3, 0, 1, 0)〉
~v3 := (1, 0, 0, 0).
~v2 := (A− 2I)~v3 =
−2 −4 0 −10 0 0 00 0 −2 04 8 −12 2
1000
=
−2004
~v1 := (3, 0, 1, 0), ~v4 = (−2, 1, 0, 0).
P =
3 −2 1 −20 0 0 11 0 0 00 4 0 0
c)
eJ =
1 0 0 00 e2 e2 00 0 e2 00 0 0 e2

118 TEMA 2. DIAGONALIZACIÓN DE ENDOMORFISMOS

Tema 3
Espacio afín y euclídeo. Movimientos
3.1. Formas bilineales
Sea V un espacio vectorial sobre un cuerpo K. Llamamos forma bilineal a toda aplicación
f : V × V −→ K(~u,~v) 7−→ f(~u,~v)
que verifica:
1. f(~u, λ~v + µ~w) = λf(~u,~v) + µf(~u, ~w) ∀~u,~v, ~w ∈ V y λ, µ ∈ K.
2. f(λ~u+ µ~v, ~w) = λf(~u, ~w) + µf(~v, ~w) ∀~u,~v, ~w ∈ V y λ, µ ∈ K.
es decir, una aplicación f : V × V → K es una forma bilineal si es lineal en cada una de suscomponentes.Al conjunto de las formas bilineales lo denotamos por L 2(V 2;K)
Ejemplo 11. Dado R2, la aplicación f : R2 × R2 → R definida por
f : R2 × R2 → R((x1, x2), (y1, y2)) 7→ x1 · y2
es una forma bilineal, ya que para todo (x1, x2), (y1, y2), (z1, z2) ∈ R2 y λ, µ ∈ K se tiene que
f(λ(x1, x2) + µ(y1, y2), (z1, z2)) = f((λx1 + µy1, λx2 + µy2), (z1, z2)) = (λx1 + µy1)z2 = λx1z2+
+ µy1z2 = λf((x1, x2), (z1, z2)) + µf((y1, y2), (z1, z2))
con lo que queda comprobada la linealidad en la primera variable (o primer argumento) y, análoga-mente, se comprobaría la linealidad en la segunda variable (o segundo argumento).
Ejemplo 12. Comprobar que las siguientes aplicaciones son bilineales:
1. f : R2 × R2 → R definida como f [(a, b), (c, d)] = ac+ bd.
2. f : R2 × R2 → R definida como f [(a, b), (c, d)] = ad− bc.
3. f : Kn × Kn → K definida como f(X,Y ) = XtAY , conA ∈Mn(K).
1. Veamos si f es una aplicación lineal en la primera variable:
f(λ(a1, b1) + µ(a2, b2), (c, d)) = f((λa1 + µa2, λb1 + µb2), (c, d)) = (λa1 + µa2)c+ (λb1+
+ µb2)d = λ(a1c+ b1d) + µ(a2c+ b2d) = λf((a1, b1), (c, d)) + µf((a2, b2), (c, d))
119

120 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Y por tanto, es lineal en la primera variable. Análogamente se comprobaría que es lineal en la segundavariable y entonces, f es una aplicación bilineal.2. Igual que antes comprobamos la linealidad en la primera variable:
f(λ(a1, b1) + µ(a2, b2), (c, d)) = f((λa1 + µa2, λb1 + µb2), (c, d)) = (λa1 + µa2)d− (λb1+
+ µb2)c = λ(a1d− b1c) + µ(a2d− b2c) = λf((a1, b1), (c, d)) + µf((a2, b2), (c, d))
Análogamente se comprobaría en la segunda variable, por lo que f es una aplicación bilineal.3. Comprobamos la linealidad en la primera variable:
f(λX + µZ, Y ) = (λX + µZ)tAY = (λX t + µZt)AY = λX tAY + µZtAY =
= λf(X, Y ) + µf(Z, Y )
Análogamente se comprobaría la linealidad en la segunda variable, por lo que f es una aplicaciónbilineal.
Teorema 7. Sea f : V × V → K una forma bilineal. Entonces:
f(~u,~0) = f(~0, ~u) = 0 ∀~u ∈ V
Definición 15. Se dice que una forma bilineal f : V × V → K es simétrica (L 2s (V 2;K)) si verifica
quef(~u,~v) = f(~v, ~u) ∀~u,~v ∈ V
Ejemplo 13. La forma bilineal f : R2 × R2 −→ R definida por f [(x1, x2), (y1, y2)] = x1y1 + x2y2es simétrica puesto que:
f((x1, x2), (y1, y2)) = x1y1 + x2y2 = y1x1 + y2x2 = f((y1, y2), (x1, x2))
Definición 16. Se dice que una forma bilineal f : V × V → K es antisimétrica (L 2a (V 2;K)) si
verifica quef(~u,~v) = −f(~v, ~u) ∀~u,~v ∈ V
Proposición 8. Una forma bilineal f : V × V → K es alternada si y sólo si f(~u, ~u) = 0 para todo~u ∈ V .
Definición 17. Un cuerpo K de característica n es aquel cuerpo en el que se cumple
n · ~u = 0 ∀~u ∈ K
Por ejemplo, el cuerpo de los reales tiene característica 0.
Proposición 9. Dada f ∈ L 2(V 2;K), si la característica de K es distinta de 2, entonces f es alter-nada si y solo si f es antisimétrica.
Nótese que si la característica del cuerpo es 2 se tiene que 2x = 0 ⇒ x + x = 0 ⇒ x = −x, luegolos conceptos de forma bilineal simétrica y antisimétrica son indistinguibles.
3.1. FORMAS BILINEALES 121
Proposición 10. Si K es un cuerpo de característica distinta de 2, tenemos que:
L2s(V
2;K)⊕L 2a (V 2;K) = L 2(V 2;K)
L2s(V
2;K) y L 2a (V 2;K) son subespacios vectoriales de L2(V 2;K).
Ejemplo 14. La forma bilineal f : R2 × R2 −→ R definida por f [(x1, x2), (y1, y2)] = x1y2 − x2y1es antisimétrica puesto que:
g((x1, x2), (y1, y2)) = x1y2 − x2y1 = −(y1x2 − y2x1) = −g((y1, y2), (x1, x2))
Definición 18. Dada f ∈ L 2(V 2;K), se dice que es no degenerada a la izquierda si f(~a, ~u) = 0 paratodo ~u ∈ V , implica que ~a = 0. Análogamente se define no degenerada a la derecha.
Corolario: En dimensión finita, una forma bilineal es no degenerada a la izquierda si, y sólo si, esno degenerada a la derecha, y en ese caso se dice simplemente no degenerada.
Ejemplo 15. SeaM =
0 1 01 −1 10 0 1
y f la forma bilineal dada por f(~u, ~v) = (~u)tM~v. Prue-
ba que f no es degenerada.Consideramos ~a = (a1, a2, a3) y ~u = (x1, x2, x3) dos vectores de R3. Supongamos f(~a, ~u) = 0 ∀~u ∈R3. De la igualdad (~a)tM~u = 0, es decir,
(a1 a2 a3
)0 1 01 −1 10 0 1
x1x2x3
= 0
deducimos (a1, a2, a3) = (0, 0, 0), luego ~a = ~0, es decir, f es no degenerada a la izquierda. Según elcorolario anterior, la aplicación f es no degenerada.
3.1.1. Perpendicularidad u ortogonalidadDefinición 19. Dados ~u,~v ∈ V , se dice que ~u es perpendicular u ortogonal a ~v con respecto a f sif(~u,~v) = 0 (~u⊥f~v).
Definición 20. Dado S ⊂ V y ~u ∈ V , se dice que ~u es perpendicular u ortogonal a S con respecto af si f(~u,~v) = 0 para todo ~v ∈ S.
Definición 21. El subespacio formado por todos los elementos perpendiculares a S se denominaortogonal de S con respecto de f por la izquierda y se denota por ⊥f
S
⊥f
S = {~u ∈ V |f(~u,~v) = 0; ∀~v ∈ S}
De igual modo se define ortogonal de S con respecto a f por la derecha
S⊥f
= {~u ∈ V |f(~v, ~u) = 0; ∀~v ∈ S}

122 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Proposición 11. Si f es una forma bilineal simétrica o alternada, entonces tenemos que:
⊥f
S = S⊥f
Definición 22. Se denomina núcleo por la izquierda de f al subespacio
Keri(f) := {~u ∈ V = f(~u,~v) = 0; ∀~v ∈ V } = ⊥f
V
Análogamente se define el núcleo por la derecha de f como
Kerd(f) := {~u ∈ V = f(~v, ~u) = 0; ∀~v ∈ V } = V ⊥f
Proposición 12. Si f es una forma bilineal simétrica o alternada, ambos subespacios coinciden y sedenominará núcleo radical de f .
Definición 23. Se dice que f es no degenerada a la izquierda si Keri(f) = {0}.Análogamente se define no degenerada a la derecha.
Definición 24. Se dice que f , simétrica o alternada, es no degenerada si el núcleo o radical es el 0, esdecir,
si f(~u,~v) = 0 ∀~v ∈ V ⇒ ~u = 0
Definición 25. Un vector ~v ∈ V se dice isotrópico si f(~v,~v) = ~0.
Definición 26. Un subespacio S se dice totalmente isotrópico si está formado únicamente por vecto-res isotrópicos.
(¿Qué ocurre si f es alternada?)
3.1.2. Matriz asociada a una forma bilineal en una base B
Definición 27. Sea V un espacio vectorial sobre un cuerpo K, y sea f : V × V → K una formabilineal. Si B = {~v1, ~v2, . . . , ~vn} es una base de V entonces, dados dos vectores ~x, ~y ∈ V tenemosque
f(~x, ~y) = (~x)tA~y =(x1 x2 · · · xn
)f(~v1, ~v1) · · · f(~v1, ~vn)... . . . ...
f(~vn, ~v1) · · · f(~vn, ~vn)
y1...yn
donde la matriz A = (f(~vi, ~vj)) de orden n definida sobre K recibe el nombre de matriz de la formabilineal f en la base B (A = MB(f)).
Ejemplo 16. Sea f : R3 × R3 7→ R una forma bilineal denida como
f [(x1, x2, x3), (y1, y2, y3)] = 2x1y1 − 3x1y2 + 6x1y3 + x2y3 + 2x3y1 − x3y2
Calcular la expresión matricial de f en la base canónica deR3 y en la baseB = {(2, 0, 0), (0, 1, 0), (1, 0, 1)}.
Definición 28. Se denomina rango de una forma bilineal al rango de cualquiera de las matrices aso-ciadas a la forma bilineal.

3.1. FORMAS BILINEALES 123
Definición 29. Si dimV = n y f : V × V → K es una forma bilineal de rango menor que n, se diceque la forma es degenerada. Si el rango de f es n es no degenerada.
Nota: la condición necesaria y suficiente para que una forma bilineal sea degenerada es que |A| = 0,siendo A cualquier matriz asociada a la forma bilineal.
Proposición 13. Sea V un espacio vectorial de dimensión finita n, entonces las siguientes condicio-nes son equivalentes:
1. V ⊥f= 0.
2. ⊥fV = 0.
3. La matriz asociada a f es regular.
Nótese que no hace falta que sea simétrica o alternada.
Proposición 14. Sea f ∈ L 2(V 2;K). Se tiene que:
1. Si f es una forma bilineal simétrica la matriz asociada a f es simétrica, es decir At = A.
2. Si f es una forma bilineal antisimétrica la matriz asociada a f es antisimétrica, es decir At =−A.
Teorema 8. Sea V un espacio vectorial de dimensión n sobre el cuerpo K y sea f : V × V → K unaforma bilineal. Si A es la matriz asociada a f en la base B de V y B es la matriz asociada a f en labase B′ de V entonces se verifica que
B = P tAP
donde P = PBB′ es la matriz de cambio de base de B a B′ (A y B son matrices congruentes).
Ejemplo 17. Sea f : R3 × R3 → R una forma bilineal definida como
f [(x1, x2, x3), (y1, y2, y3)] = 2x1y1 − 3x1y2 + 6x1y3 + x2y3 + 2x3y1 − x3y2
Calcular la expresión matricial de f en la base canónica de R3 y en la base B = {(2, 0, 0),(0, 1, 0), (1, 0, 1)}.Si denotamos mediante C = {e1, e2, e3} a la base canónica, para la matriz hay que calcular f(e1, e1),f(e1, e2), . . . , f(e3, e3). Con ellos la matriz es:
f((1, 0, 0), (1, 0, 0)) = 2f((1, 0, 0), (0, 1, 0)) = −3f((1, 0, 0), (0, 0, 1)) = 6f((0, 1, 0), (1, 0, 0)) = 0f((0, 1, 0), (0, 1, 0)) = 0f((0, 1, 0), (0, 0, 1)) = 1f((0, 0, 1), (1, 0, 0)) = 2f((0, 0, 1), (0, 1, 0)) = −1f((0, 0, 1), (0, 0, 1)) = 0
⇒ A = MC(f) =
2 −3 60 0 12 −1 0

124 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Nota: respecto de la base canónica, a partir de la expresión de la forma bilineal se puede escribir lamatriz directamente, (sin cálculos) porque atiende a la siguiente “regla nemotécnica”: enumerandolas filas con las componentes de ~x y las columnas con las de ~y, los elementos de la matriz son los coe-ficientes del producto de las componentes de ~x e ~y. Así a11 es el coeficiente de x1y1, a12 el coeficientede x1y2, etc. . . pero ¡ojo! sólo es así para la matriz respecto de la base canónica.Para calcular la matriz respecto de la base B hay dos vías: calculando directamente las imágenes delos pares de vectores a partir de la expresión de f , tal como hacíamos en las aplicaciones lineales soloque ahora es más laborioso, o a través de la matriz P de cambio de base de B a C. Optamos por estasegunda vía. Realícese como ejercicio por la primera y compruébese que se obtiene la misma matriz.La matriz de cambio de base de B a C es
P =
2 0 10 1 00 0 1
Así la matriz A′ = MB(f) de f respecto de la base B′ es A′ = P tAP y vale
A′ =
2 0 00 1 01 0 1
2 −3 60 0 12 −1 0
2 0 10 1 00 0 1
=
4 −6 120 0 14 −4 6
2 0 10 1 00 0 1
=
8 −6 160 0 14 −4 10
3.1.3. Bases ortogonalesDefinición 30. Se dice que V es suma directa ortogonal de U1 y U2 si es suma directa de U1 y U2 yf(~x, ~y) = 0 para todos ~x ∈ U1 e ~y ∈ U2.
V = U1⊥fU2 = U1 ⊥ U2
Definición 31. Dada f , bilineal simétrica, se dice que {~v1, ~v2, . . . , ~vn} es una base ortogonal si f(~vi, ~vj) =0 si i 6= j.
Definición 32. Dada f , bilineal simétrica, se dice que {~v1, ~v2, . . . ~vn} es una base ortonormal sif(~vi, ~vj) = 0 si i 6= j y f(~vi, ~vi) = 1 para todo i.
Proposición 15. Sea f aplicación bilineal simétrica o alternada, no degenerada y U subespacio de V .Entonces son equivalentes:
1. f es no degenerada sobre U (la restricción de f a U . En este caso U se dice que es un subespaciovectorial no degenerado).
2. U + U⊥ = V
3. U ⊥ U⊥ = V
4. f no es degenerada sobre U⊥
Teorema 9. Si f es una aplicacion bilineal simétrica, entonces existe una base B respecto a la cualla matriz asociada de f es diagonal. Dicha base es una base ortogonal.

3.1. FORMAS BILINEALES 125
Definición 33. Dada f bilineal simétrica, se denomina rango al número de valores distintos de cerode la matriz diagonal asociada.
Proposición 16. La dimensión del núcleo de f será:
dim(Ker f) = n− rang(A)
Proposición 17. Sea f : V × V → K una forma bilineal simétrica y X un subespacio vectorial de Vtal que la restricción de f a X es no degenerada. Entonces existe un subespacio vectorial Y de V talque V = X ⊥ Y .
Definición 34. Dados ~x = (~x1, . . . , ~xn) e ~y = (y1, . . . , yn) en la base canónica, se define productoescalar euclideo a
f(~x, ~y) =n∑i=1
xiyi
3.1.4. Diagonalización usando vectores no isotrópicosEjemplo 18. Diagonaliza la forma bilineal simétrica cuya matriz en la base canónica es
A =
1 0 20 −1 12 1 0
.Buscamos ~v1 no isotrópico, por ejemplo (1, 0, 0).
(1 0 0
)1 0 20 −1 12 1 0
100
=(1 0 2
)100
= 1 6= 0
Calculamos el subespacio ortogonal a ~v1, 〈~v1〉⊥ = {~x ∈ R3 : f(~v1, ~x) = 0}
(1 0 0
)1 0 20 −1 12 1 0
xyz
=(1 0 2
)xyz
= x+ 2z = 0⇒
x = −2αy = βz = α
resultando 〈~v1〉⊥ = 〈(−2, 0, 1), (0, 1, 0)〉. Tomamos ~v2 := (0, 1, 0) y comprobamos si cumple quef(~v2, ~v2) 6= 0:
(0 1 0
)1 0 20 −1 12 1 0
010
=(0 −1 1
)010
= −1 6= 0
Ahora calculamos 〈~v1, ~v2〉⊥ = 〈~v3〉, para lo cual, calculamos
(0 1 0
)1 0 20 −1 12 1 0
xyz
=(0 −1 1
)xyz
= −y + z = 0

126 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
y entonces tenemos que
〈~v1, ~v2〉⊥ =
{x+ 2z = 0−y + z = 0
=
x = −2αy = αz = α
= 〈(−2, 1, 1)〉 =: 〈~v3〉
Calculamos f(~v3, ~v3):
(−2 1 1
)1 0 20 −1 12 1 0
−211
=(0 0 −3
)−211
= −3
f(~v3, ~v3) puede ser 0 ya que ~v3 es el último vector y no tiene que ser no isotrópico. La base ortogonalserá por tanto B = {~v1, ~v2, ~v3}.La matriz respecto de la nueva base será
MB(f) =
1 0 00 −1 00 0 −3
y la matriz de paso
P =
1 0 −20 1 10 0 1
3.2. Formas cuadráticas
Definición 35. Dado un espacio vectorial V sobre un cuerpo K y una forma bilineal f sobre V , ala función q : V → K, definida por q(~x) = f(~x, ~x) para todo ~x ∈ V , se le llama forma cuadráticaasociada a f .
Ejemplo 19. Consideremos la forma bilineal f : R2 × R2 → R definida por:
f((x1, x2), (y1, y2)) = x1y2 + x2y1
La forma cuadrática asociada a f es la aplicación
q : R2 7→ R
dada por:q(x1, x2) = 2x1x2
Ejemplo 20. Consideremos la forma bilineal f en R2 definida por:
f((x1, x2), (y1, y2)) = 2x1y2
La forma cuadrática asociada a f es, igual que antes,
q(x1, x2) = 2x1x2

3.2. FORMAS CUADRÁTICAS 127
Observación: Distintas formas bilineales pueden dar lugar a una misma forma cuadrática.La forma cuadrática puede expresarse matricialmente como:
q((x1, . . . , xn)B) = (x1, . . . , xn)BA
x1...xn
B
donde A es la matriz asociada a la forma bilineal f respecto de una base B de V , es decir MB(q) =MB(f).
Ejemplo 21. Determinar qué funciones q : Rn → R de las siguientes son formas cuadráticasen R.
1. n = 2, q(x, y) = x2 + 2xy + y2.
2. n = 2, q(x, y) = x2 + 2xy + y2 + 1.
3. n = 3, q(x, y, z) = x2 + y2 + z2.
4. n = 3, q(x, y, z) = x2 + y2 + z2 + 4xz.
Definición 36. Dada una forma cuadrática q : V → K, la forma simétrica f : V × V → K definidacomo
f(~x, ~y) =1
2(q(~x+ ~y))− q(~x)− q(~y)
para todo (~x, ~y) ∈ V × V , se denomina forma polar de la forma cuadrática q.
Consecuencia de su definición tenemos que:
1. q(λx) = λ2q(x).
2. q(x+ y) = q(x) + q(y) + f(x+ y) + f(y, x).
3. MB′(q) = P tMBP (cambio de base).
4. rang(r) = rango de cualquier matriz asociada a q.
5. q es no degenerada si la forma polar f es no degenerada.
3.2.1. Formas cuadráticas realesDado un espacio vectorial V de dimensión n y q : V → R una forma cuadrática
• q es definida positiva si q(~v) > 0, para todo ~v ∈ V, (v 6= 0).
• q es definida negativa si q(~v) < 0, para todo ~v ∈ V, (v 6= 0).
Nota: Toda forma cuadrática definida es no degenerada.
• q es semidefinida positiva si q(~v) ≥ 0, para todo ~v ∈ V, (v 6= 0).
• q es semidefinida negativa si q(~v) ≤ 0, para todo ~v ∈ V, (v 6= 0).
• q es indefinida en cualquier otro caso, es decir, cuando toma valores negativos y positivos.

128 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
3.2.2. Diagonalización de formas cuadráticasDefinición 37. Dada una forma cuadrática q : V → K, se dice que es diagonalizable si existe unabase B tal que
q(~v) = λ1ξ1(~v)2 + · · ·+ λnξn(~v)2
Definición 38. Se define rango (r) de una matriz diagonal asociada a una forma cuadrática como elnúmero de elementos no nulos.
Teorema 10 (Ley de inercia de Sylvester). Todas las matrices diagonales asociadas a una mismaforma cuadrática real tienen el mismo número de elementos positivos, negativos y nulos.
Definición 39. Se llama signatura (s) de una forma cuadrática al número de elementos positivos deuna matriz diagonal asociada, siendo invariante.
Proposición 18. Sean r y s el rango y la signatura de una forma cuadrática real q, entonces:
• 0 ≤ s ≤ r ≤ n.
• Si 0 = s < r < n, q es semidefinida negativa.
• Si 0 = s < r = n, es definida negativa.
• Si 0 < s < r, es indefinida.
• Si 0 < s = r < n, semidefinida positiva.
• Si 0 < s = r = n, definida positiva.
Teorema 11 (Teorema del eje principal). Sea A una matriz simétrica. Entonces todos sus autovalo-res son reales y además se tiene que:
A = PDP−1
siendo D, diagonal y P una matriz ortogonal (P−1 = P t).
Nota: Los vectores columna de la matriz P deben ser ortonormales según el producto escalar euclídeo.
Ejemplo 22. Diagonaliza ortogonalmente la forma cuadrática definida por
A =
3 −1 0−1 3 00 0 2
.Calculamos primeramente el polinomio característico
p(λ) = |A− λI3| =
∣∣∣∣∣∣3− λ −1 0−1 3− λ 00 0 2− λ
∣∣∣∣∣∣ = (3− λ)2(2− λ)− (2− λ) = (2− λ)[(3− λ)2−
− 1] = (2− λ)(9− 6λ+ λ2 − 1) = (2− λ)(λ2 − 6λ+ 8)
3.2. FORMAS CUADRÁTICAS 129
Calculamos las raíces de la ecuación caracteristica:
λ =6±√
36− 32
2=
6±√
4
2=
6± 2
2; λ1 = 4, λ2 = 2
Entonces el polinomio característico queda: p(λ) = (λ− 4)(λ− 2)2. Posteriormente calculamos lossubespacios propios correspondientes a 4 y 2.
Ker(A− 4I3) :
−1 −1 0−1 −1 00 0 −2
xyz
=
000
⇒ {−x− y = 0−2z = 0
⇒
x = αy = −αz = 0
Ker(A− 2I3) :
1 −1 0−1 1 00 0 0
xyz
=
000
⇒ x− y = 0⇒
x = βy = βz = α
Resultando los subespacios generados por 〈(1,−1, 0)〉 y 〈(1, 1, 0), (0, 0, 1)〉 respectivamente. En ulti-ma instancia normalizamos dichos vectores, obteniendo(
1√2,− 1√
2, 0
),
(1√2,
1√2, 0
), (0, 0, 1)
D =
4 0 00 2 00 0 2
P =
1√2
1√2
0
− 1√2
1√2
0
0 0 1
verificándose que D = PMP t y PP t = I3.
3.2.3. Diagonalización usando operaciones elementales (por congruencia)
La diagonalización ortogonal mediante el polinomio característico, puede ser dificil (o imposible enocasiones) de llevar a cabo, pues supone encontrar las raíces de dicho polinomio.Sin embargo, como se buscan matrices diagonales que sean congruentes y no es necesario que tam-bién sean semejantes, es posible disponer de otros métodos más sencillos pero igualmente eficacespara obtener una matriz diagonal, como es mediante vectores no isotrópicos (ya visto) o medianteoperaciones elementales.Para diagonalizar realizando operaciones elementales, ampliaremos la matriz de la forma cuadráticacon la matriz identidad. El método es totalmente análogo al método de Gauss para obtener la inversade una matriz, con la salvedad de que cada transformación que se haga por filas en la matriz, hayque hacerla también por columnas y no es necesario obtener unos en la diagonal principal (sólo cerosfuera). La matriz identidad sólo se ve afectada por las operaciones que realicemos por filas. Despuésde dicha manipulación, la matriz identidad se convierte en la matriz P t de forma que D = P tAP ,siendo P la matriz de paso, de forma que sus columnas son las coordenadas de los vectores de lanueva base en la antigua. Hay que tener en cuenta que este método sólo es posible cuando la matrizde partidaA es simétrica, ya que toda matriz congruente de una matriz simétrica es también simétrica,y lo que buscamos es una matriz diagonal y las matrices diagonales son simétricas.

130 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Ejemplo 23. Diagonaliza la forma cuadrátrica q(x, y, z) = x2 + 2y2 + 4z2 + 2xy − 4yz,donde las coordenadas están dadas respecto a la base canónica.1 1 0 1 0 0
1 2 −2 0 1 00 −2 4 0 0 1
F2−F1−→
1 1 0 1 0 00 1 −2 −1 1 00 −2 4 0 0 1
C2−C1−→
1 0 0 1 0 00 1 −2 −1 1 00 −2 4 0 0 1
F3+2F2−→
1 0 0 1 0 00 1 −2 −1 1 00 0 0 −2 2 1
C3+2C2−→
1 0 0 1 0 00 1 0 −1 1 00 0 0 −2 2 1
Por tanto, tenemos que:
D =
1 0 00 1 00 0 0
P =
1 −1 −20 1 20 0 1
Siendo por tanto la nueva base 〈(1, 0, 0), (−1, 1, 0), (−2, 2, 1)〉, y la forma cuadrática, respecto de estabase será q(r, s, t) = r2 + s2, siendo (r, s, t) las coordenadas de un vector cualquiera.
Ejemplo 24. Estudia los subespacios totalmente isotrópicos de (R3, q) con q la forma cuadráti-ca dada por q(x, y, z) = x2 + y2 − z2, en la base canónica.Sea C la base canónica de R3 la matriz de la forma cuadrática será
MC(f) =
1 0 00 1 00 0 −1
Si ~v ∈ R3 de coordenadas (x, y, z) es isotrópico, entonces
(x y z
)1 0 00 1 00 0 −1
xyz
= 0⇒(x y −z
)xyz
= 0⇒ x2 + y2 − z2 = 0
Por tanto z2 = x2 + y2. El conjunto I = {(x, y, z) ∈ R3 : z2 = x2 + y2} es un cono. Sea S unsubespacio totalmente isotrópico. La dimensión de S podría ser 0, 1, 2, 3. No puede ser 3, porque R3
tiene vectores no isotrópicos. Tampoco es cero, porque al menos hay un vector isotrópico. Puede ser1, que correspondería a las generatrices del cono. No puede ser 2 porque tendríamos un plano quetendría que estar contenido en el cono. Por lo tanto,la dimensión es 1. (No entiendo nada)
3.2.4. Métodos de determinación del carácter de una forma cuadrática
Mediante la diagonalización de la forma cuadrática
Dada la forma cuadrática q(~v) = d1x21 + d2x
22 + · · ·+ dnx
2n.
1. Si di > 0, para todo i ∈ {1, . . . , n}, la forma cuadrática es definida positiva.Si di < 0, para todo i ∈ {1, . . . , n}, la forma cuadrática es definida negativa.
2. Si di ≥ 0, para todo i ∈ {1, . . . , n}, con algún di = 0, la forma cuadrática es semidefinidapositiva.Si di ≤ 0, para todo i ∈ {1, . . . , n}, con algún di = 0, la forma cuadrática es semidefinidanegativa.
3. Si hay coeficientes di positivos y negativos la forma cuadrática es indefinida.

3.2. FORMAS CUADRÁTICAS 131
Mediante el estudio del signo de los menores principales Pr de cualquier matriz de q
Dada una matriz A, llamamos Pr al menor principal de orden r formado por las r filas y columnasde la matriz A.
1. Si Pi > 0, para todo i ∈ {1, . . . , n}, entonces la forma cuadrática es definida positiva.
2. Si P1 < 0, P2 > 0, P3 < 0 y así sucesivamente, es decir, si los menores de orden impar sonnegativos y los de orden par positivos, entonces la forma cuadrática es definida negativa.
Ejemplo 25. Se consideran en R3 y con respecto a la base canónica, las formas cuadráticasqa(x, y, z) = x2 + ay2 + 3z2 + 2xy + 2xz + 2ayz.
1. Diagonaliza y estudia el carácter de qa para los distintos valores de a.
2. Para a = 2, calcula el subespacio ortogonal del subespacio V = x− y = 0 respecto dela forma polar.
1. Diagonalizamos usando operaciones elementales sobre la matriz1 1 11 a a1 a 3
∼1 0 0
0 a− 1 a− 10 a− 1 2
∼1 0 0
0 a− 1 00 0 3− a
• Si a 6= 1 y a 6= 3 la forma cuadrática es no degenerada.
• Si a ∈ (−∞, 1), es indefinida,porque a− 1 < 0 y 3− a > 0.
• Si a ∈ (1, 3), es definida positiva porque a− 1 > 0 y 3− a > 0.
• Si a ∈ (3,∞), es indefinida porque a− 1 > 0 y 3− a < 0.
• Si a = 1, entonces es semidefinida positiva, porque 3− a > 0.
• Si a = 3, entonces es semidefinida positiva, porque a− 1 > 0.
Si a = 2, una base del espacio vectorial V = x − y = 0 es 〈(1, 1, 0), (0, 0, 1)〉. La matriz asociada ala forma cuadrática (y a la forma polar asociada fa) será1 1 1
1 2 21 2 3
Los vectores (x, y, z) del subespacio ortogonal a V deben cumplir:
(1, 1, 0)
1 1 11 2 21 2 3
xyz
= 0 (0, 0, 1)
1 1 11 2 21 2 3
xyz
= 0
Habrá que resolver el sistema, por tanto,{2x+ 3y + 3z = 0x+ 2y + 3 = 0
Como, x = −y; z = −13y tenemos que V ⊥ = 〈(〉 3,−3, 1).

132 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
3.3. Isometrías
Definición 40. Dados dos espacios vectoriales (V1, q1) y (V2, q2) sobre un mismo cuerpo, y un iso-morfismo φ : V1 → V2, se dice que φ es una isometría si
q2(φ(x)) = q1(x), ∀x ∈ V1
(qi formas cuadráticas)
Proposición 19. En las condiciones anteriores, si fi es la forma polar de qi, son equivalentes lassiguientes condiciones:
1. f2(φ(~u), φ(~v)) = f1(~u,~v) para todos ~u,~v ∈ V1.
2. q2(φ(~u)) = q1(~u) para todo ~u ∈ V1.
Definición 41. Se define el grupo ortogonal de (V, q), denotado por O(V, q) a
O(V, q) = {φ : V → V |φ es una isometría} = {φ|q(φ(x)) = q(x)}
A los elementos de O(V, q) se denominan transformaciones ortogonales.
Proposición 20. φ es una isometría si y solo si f(φ(ei), φ(ej)) = f(ei, ej), ∀ei, ej ∈ B siendo Buna base de V , y f la forma polar asociada a q.
Proposición 21. Dado un isomorfismo T : V → V , es una transformación ortogonal si y solo si,fijada una base B de V se tiene que:
MB(T )tMB(q)MB(T ) = MB(q)
Ejemplo 26. Dado el par (R2, q), donde q(x, y) = x2 + y2, consideramos Ta : R2 → R2 elisomorfismo en la base canónica dado por:
MC(Ta) =
(cos a sen a− sen a cos a
)Demuestre que Ta es una isometría.
Aplicando la proposición anterior, y sabiendo que MB(q) =
(1 00 1
), sólo tenemos que comprobar
que MC(Ta)tMC(Ta) = I2. Lo comprobamos:(
cos a − sen asen a cos a
)(cos a sen a− sen a cos a
)=
(cos2 a+ sen2 a 0
0 sen2 a+ cosa
)=
(1 00 1
)Por tanto es una isometría.

3.3. ISOMETRÍAS 133
3.3.1. Transformaciones ortogonales en Rn
Proposición 22. La matriz de una transformación ortogonal de (Rn, q) es, en cierta base ortonormal,de la forma:
Ir−Is
cosα1 senα1
− senα1 cosα1
. . .cosαk senαk− senαk cosαk
3.3.2. Transformaciones ortogonales en R2
Utilizando la proposición anterior, tenemos:
• Transformación ortogonal tipo I. Giro de ángulo θ(cos θ − sen θsen θ cos θ
)• Transformación ortogonal tipo II. Simetría respecto de un eje(
1 00 −1
)3.3.3. Transformaciones ortogonales en R3
• Transformación tipo I. Rotación de ángulo θ y cierto eje1 0 00 cos θ − sen θ0 sen θ cos θ
• Transformación ortogonal tipo II. Simetría respecto de un eje−1 0 0
0 1 00 0 1
• Transformación tipo III. Composición de I y II−1 0 0
0 cos θ − sen θ0 sen θ cos θ
• Transformación tipo IV. Simetría respecto de un eje (θ = π)1 0 0
0 −1 00 0 −1

134 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Proposición 23. El determinante de una transformación ortogonal es 1 o −1.
Definición 42. 1. Se denomina transformaciones ortogonales propias o directas a las isometríasde determinante 1 (O+(V, q)).
2. Se denomina transformaciones ortogonales impropias o indirectas a las isometrías de determi-nante −1 (O(V, q)).
3. O(V, q) = O+(V, q) ∪ O−(V, q).
Definición 43. Dado (V, q), con f la forma polar asociada a q y U un subespacio de V . Se defineradical de U (rad(U)) a:
rad(U) = U ∩ U+
3.4. Formas hermíticas
Definición 44. Una forma hermítica es una aplicación de V × V en un cuerpo (F,−) verificando:
1. f(a~u1 + b~u2, ~v) = af(~u1, ~v) + bf(~u2, ~v) ∀a, b ∈ F, ∀~u1, ~u2, ~v ∈ V .
2. f(~u,~v) = f(~v, ~u), ∀~u,~v ∈ V
Siendo la línea sobre f(~v, ~u) la conjugación compleja en el caso de C o la identidad en el caso de R.Un caso particular de formas hermíticas son las formas bilineales simétricas reales, ya estudiadas.
3.4.1. Aplicaciones autoadjuntasDefinición 45. Una aplicación T ∈ End(V ) se dice autoadjunta si
f(T (~u), ~v) = f(~u, T (~v)), ∀~u,~v ∈ V
siendo f una forma hermítica.
Ejemplo 27. Diagonaliza ortogonalmente el endomorfismo autoadjunto en el espacio vectorial
euclídeo R3 cuya matriz en la base canónica esA =
3 −1 0−1 3 00 0 2
.
Al ser una matriz simétrica, diagonalizamos como hemos procedido en ejercicios anteriores.
3.5. Producto escalar
Definición 46. Sea V un espacio vectorial sobre un cuerpo K y f : V × V → K una forma bilineal.Decimos que f es una forma bilineal definida positiva si verifica:
f(~u, ~u) > 0 ∀~u ∈ V, ~u 6= ~0
Definición 47. Sea V un espacio vectorial definido sobre el cuerpo de los números reales. Llamamosproducto escalar a toda forma bilineal f : V × V → R simétrica y definida positiva.

3.5. PRODUCTO ESCALAR 135
Definición 48. Llamamos espacio vectorial euclídeo a un espacio vectorial real en el que se ha defi-nido un producto escalar.
Dados dos vectores ~u,~v ∈ V , su producto escalar f(~u,~v), suele denotarse de distintas formas:
f(~u,~v) =< ~u,~v >= (~u|~v) = ~u · ~v
Ejemplo 28. 1. Sea V = Rn. Sean ~u y ~v dos vectores con coordenadas en la base canónica{x1, . . . , xn} y {y1, . . . , yn} respectivamente. Se define un producto escalar como
< ~u,~v >= x1y1 + x2y2 + · · ·+ xnyn
2. Sea V el espacio vectorial sobre R de las funciones reales que son continuas en el intervalo[a, b]. Se puede definir el producto escalar de dos funciones f, g ∈ V como
< f, g >=
∫ b
a
f(t)g(t)dt
3. Sea V = Pn(R). Un producto escalar entre dos polinomios
p(x) = a0 + a1x+ · · ·+ anxn q(x) = b0 + b1x+ · · ·+ bnx
n
se define como: < p(x), q(x) >= a0b0 + a1b1 + · · ·+ anbn.
3.5.1. Determinación de un producto escalarTeorema 12. Sea V un espacio vectorial euclídeo y B = {~v1, . . . , ~vn} una base de V . Entonces elproducto escalar de dos vectores cualesquiera, ~u,~v ∈ V queda determinado conociendo los productosescalares < ~vi, ~vj > de los vectores de B.
< ~u,~v >=n∑i=1
n∑j=1
xiyi < ~ui, ~vi >
Expresando matricialmente este resultado:
< ~u,~v >= X tGY =(x1 . . . xn
)< ~v1, ~v1 > · · · < ~v1, ~vn >... . . . ...
< ~vn, ~v1 > · · · < ~vn, ~vn >
y1...yn
donde G es la matriz asociada al producto escalar dado en la base B: matriz de Gram.
Ejemplo 29. Sea V = P3(R) con producto escalar
< p(t), q(t) >=
∫ 1
0
p(t)q(t)dt
Hallar la matrizG asociada a dicho producto escalar en la base B = {1, t, t2, t3}.

136 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Definición 49. Sea V un espacio vectorial euclídeo. Llamamos norma, módulo o longitud de unvector ~u ∈ V al número real:
||~u|| =√< ~u, ~u >
Definición 50. Se dice que un vector ~u es unitario o normalizado si ||~u|| = 1. Dado un vector ~u 6= 0
el vector~u
||~u||es unitario. Este proceso se llama normalización de ~u.
Proposición 24. Propiedades de la norma. Sea V un espacio vectorial euclídeo, y sean ~u,~v ∈ V ,λ ∈ R. Entonces:
1. ||~u|| = 0 si y sólo si ~u = ~0.
2. ||λ~u|| = |λ| ||~u||.
3. | < ~u,~v > | ≤ ||~u|| ||~v|| (Desigualdad de Schwarz).
4. ||~u+ ~v|| ≤ ||~u||+ ||~v|| (Desigualdad triangular).
Definición 51. Sean ~u,~v dos vectores no nulos de un espacio vectorial euclídeo V . El ángulo queforman ~u y ~v se define:
áng(~u,~v) = θ = arc cos< ~u,~v >
||~u|| ||~v||Utilizando la definición de ángulo podemos expresar el producto escalar de dos vectores de la forma:
< ~u,~v >= ||~u|| ||~v|| cos θ
Ejemplo 30. Sobre el espacio vectorial U de los polinomios sobre R, definimos la siguiente for-ma bilineal
< p, q >=
∫ 1
0
p(t)q(t)dt
Se pide1. Pruebe que< ·, · > es un producto escalar.
2. Si p(x) = x+ 2 calcule ||p||.1. Tenemos que probar que < ~u, ~u >> 0 si x(t) 6= 0, lo cual es evidente porque, < ~u, ~u >=∫ 1
0x(t)x(t)dt =
∫ 1
0x2(t)dt, es el área de x2(t), entre el eje de abscisas, y las rectas x = 0 y x = 1.
2. Calculamos la norma de p
||p|| =
√∫ 1
0
p(t)p(t)dt =
√∫ 1
0
(t+ 2)2dt =
√∫ 1
0
(t2 + 4t+ 4)dt =
√[t3
3+ 2t2 + 4t
]10
=
=
√1
3+
6
3+
12
3=
√19
3
Ejemplo 31. Sea V = R3. Consideramos f : V × V → R el producto escalar euclídeo. Dadoslos subespacios S1 =< e1, e2 >, S2 =< e3 > y S3 =< e1 + e2 + e3 >. Verifica que R3 essuma directa ortogonal de los subespacios S1 y S2. Verifica también que es suma directa de S1
y S3 pero no ortogonal.En ambos casos, trivialmente la suma es directa (¿por qué?).En el primer caso, como f(e1, e3) = f(e2, e3) = 0, la suma directa es ortogonal.En el segundo caso, f(e1, e1 + e2 + e3) = 1 6= 0, no es suma ortogonal.

3.5. PRODUCTO ESCALAR 137
3.5.2. Conjunto ortogonal y ortonormal
Definición 52. En un espacio vectorial euclídeo V se dice que ~u,~v ∈ V son vectores ortogonales si< ~u,~v >= 0.
Observar que dos vectores no nulos ~u,~v son ortogonales si y sólo si son perpendiculares, pues en estecaso cos(~u,~v) = 0. Por ello si ~u,~v son ortogonales suele denotarse ~u⊥~v.
Definición 53. Un conjunto de vectores no nulos ~v1, . . . , ~vn} de un espacio vectorial euclídeo V sedice que es un conjunto ortogonal si cada vector del conjunto es ortogonal a todos los demás, es decir< ~vi, ~vj >= 0, ∀i 6= j.
Diremos que dicho conjunto es ortonormal si además se verifica que los vectores que lo forman sonunitarios.
Teorema 13. Sea V un espacio vectorial euclídeo. Si S = {~v1, . . . , ~vn} es un conjunto ortogonal devectores no nulos de V , entonces dicho conjunto es linealmente independiente.
3.5.3. Método de ortogonalización de Gram-Schmidt
Teorema 14. En todo espacio vectorial euclídeo V de dimensión finita existe al menos una baseortonormal.
Utilizamos un método constructivo, que partiendo de una base cualquiera B = {~v1, . . . , ~vn} de Vpermite obtener una base ortogonal Bog = {~w1, . . . , ~wn} de V .Se definen los vectores desconocidos de Bog como combinación lineal de los de B.
~w1 = ~v1
~w2 = ~v2 + a21 ~w1
~w3 = ~v3 + a31 ~w1 + a32 ~w2
...~wn = ~vn + an1 ~w1 + an2 ~w2 + · · ·+ an,n−1 ~wn−1
Los vectores ~wi, ~wj tienen que ser ortogonales (< ~wi, ~wj >= 0).Por lo tanto:
0 =< ~w2, ~w1 >=< ~v2 + a21 ~w1, ~w1 >=< ~v2, ~w1 > +a21 < ~w1, ~w1 >⇒ a21 =− < ~v2, ~w1 >
< ~w1, ~w1 >
0 =< ~w3, ~w1 >=< ~v3 + a31 ~w1 + a32 ~w2, ~w1 >=< ~v3, ~w1 > +a31 < ~w1, ~w1 > +a32 < ~w2, ~w1 >⇒
⇒ a31 =− < ~v3, ~w1 >
< ~w1, ~w1 >

138 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Calculando así cada uno de los coeficientes aij tenemos que:
~w1 = ~v1
~w2 = ~v2 −< ~v2, ~w1 >
< ~w1, ~w1 >~w1
~w3 = ~v3 −< ~v3, ~w1 >
< ~w1, ~w1 >~w1 −
< ~v3, ~w2 >
< ~w2, ~w2 >~w2
...
~wn = ~vn −< ~vn, ~w1 >
< ~w1, ~w1 >~w1 −
< ~vn, ~w2 >
< ~w2, ~w2 >~w2 − · · · −
< ~vn, ~wn−1 >
< ~wn−1, ~wn−1 >~wn−1
Ejemplo 32. Sea V = R3 con el producto escalar usual. Aplicar el método de Gram-Schmidt ala base B = {(1, 1, 0), (1, 0, 1), (0, 1, 1)}.
Ejemplo 33. Sea f : R3 × R3 → R definida por:
f(~u, ~v) = (x1 − 2x2)(y1 − 2y2) + x2y2 + (x2 + x3)(y2 + y3)
siendo (x1, x2, x3) e (y1, y2, y3) las coordenadas de ~u e ~v en la base canónica.
1. Pruebe que es un producto escalar.
2. Aplique Gram-Schmidt, con este producto escalar, a la base canónica.
1. Desarrollando f(~u,~v) tenemos:
f(~u~v) = x1y1 − 2x1y2 − 2x2y1 + 4x2y2 + x2y2 + x2y2 + x2y3 + x3y2 + x3y3 =
= x1y1 − 2x1y2 − 2x2y1 + 6x2y2 + x2y3 + x3y2 + x3y3
La expresión matricial de f será:
f((x1, x2, x3), (y1, y2, y3)) =(x1 x2 x3
) 1 −2 0−2 6 10 1 1
y1y2y3
Demostraremos que se trata de un producto escalar viendo que la forma cuadrática asociada es defi-nida positiva ya que evidentemente es simétrica.Si x 6= 0, por ser suma de cuadrados, q(x) ≥ 0. Para que q(x) = 0, se tendrá que verificar:
x1 − 2x2 = 0x2 = 0x2 + x3 = 0
⇒ x1 = x2 = x3 = 0
luego es un producto escalar. Veámoslo de otra forma diagonalizando la matriz usando vectores noisotrópicos. Seleccionamos ~u1 = (1, 0, 0) con
f(~u1, ~u1) =(1 0 0
) 1 −2 0−2 6 10 1 1
100
=(1 −2 0
)100
= 1

3.5. PRODUCTO ESCALAR 139
por lo que ~u1 es no isotrópico. El segundo vector de la base será seleccionado de < ~u1 >⊥, es decir,
verificando f(~u1, ~u2) = 0, esto es,
(1 0 0
) 1 −2 0−2 6 10 1 1
xyz
=(1 −2 0
)xyz
= x− 2y = 0⇒
x = 2αy = αz = β
Elegimos ~u2 = (2, 1, 0) con
f(~u2, ~u2) =(2 1 0
) 1 −2 0−2 6 10 1 1
210
=(0 2 1
)210
= 2
por lo que es no isotrópico. El tercer vector de la base, ~u3, debe pertenecer a < ~u1, ~u2 >⊥, por tanto,
debe verificar la anterior ecuación (x− 2y = 0) y f(~u2, ~x) = 0, esto es
(2 1 0
) 1 −2 0−2 6 10 1 1
xyz
= 0⇒(0 2 1
)xyz
= 0⇒ 2y + z = 0
Tenemos el sistema: {x− 2y = 02y + z = 0
⇒
x = 2αy = αz = −2α
Un posible tercer vector de la base será ~u3 = (2, 1,−2), siendo
f(~u3, ~u3) =(2 1 −2
) 1 −2 0−2 6 10 1 1
21−2
=(0 0 −1
) 21−2
= 2
La matriz diagonalizada, respecto de la base {~u1, ~u2, ~u3} será1 0 00 2 00 0 2
definida positiva por lo que se trata de un producto escalar.2. Apliquemos Gram-Schmidt a la base canónica:
~w1 = (1, 0, 0)
~w2 = (0, 1, 0)− < e2, ~w1 >
< ~w1, ~w1 >~w1
~w3 = (0, 0, 1)− < e3, ~w1 >
< ~w1, ~w1 >~w1 −
< e3, ~w2 >
< ~w2, ~w2 >~w2
Como< e2, ~w1 >
< ~w1, ~w1 >=< (0, 1, 0), (1, 0, 0) >
< (1, 0, 0), (1, 0, 0) >

140 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
calculamos
< (0, 1, 0), (1, 0, 0) >=(0 1 0
) 1 −2 0−2 6 10 1 1
100
=(−2 6 1
)100
= −2
y
< (1, 0, 0), (1, 0, 0) >=(1 0 0
) 1 −2 0−2 6 10 1 1
100
=(1 −2 0
)100
= 1
Por tanto ~w2 = (0, 1, 0)− −21
(1, 0, 0) = (2, 1, 0). Como
< ~e3, ~w1 >
< ~w1, ~w1 >=< (0, 0, 1), (1, 0, 0) >
< (1, 0, 0), (1, 0, 0) >y< ~e3, ~w2 >
< ~w2, ~w2 >=< (0, 0, 1), (2, 1, 0) >
< (2, 1, 0), (2, 1, 0) >
ahora calculamos
< (0, 0, 1), (1, 0, 0) >=(0 0 1
) 1 −2 0−2 6 10 1 1
100
=(0 1 1
)100
= 0
< (0, 0, 1), (2, 1, 0) >=(0 0 1
) 1 −2 0−2 6 10 1 1
210
=(0 1 1
)210
= 1
< (2, 1, 0), (2, 1, 0) >=(2 1 0
) 1 −2 0−2 6 10 1 1
210
=(0 2 1
)210
= 2
Por tanto ~w3 = (0, 0, 1)−0(1, 0, 0)− 12(2, 1, 0) = (−1,−1
2, 1). Normalizando los vectores obtenemos:
~v1 =~w1√
< ~w1, ~w1 >= (1, 0, 0)
~v2 =~w2√
< ~w2, ~w2 >=
(2, 1, 0)√2
~v3 =~w3√
< ~w3, ~w3 >
Calculamos
< ~w3, ~w3 >=(−1 −1
21) 1 −2 0−2 6 10 1 1
−1−1
2
1
=(0 0 1
2
)−1−1
2
1
=1
2
~v3 =
(−1,−1
2, 1
)√2

3.6. ESPACIO AFÍN 141
3.6. Espacio afín
Definición 1. Un espacio afín es una terna Π = (A, V, f) en la que A es un conjunto no vacío, acuyos elementos llamaremos puntos,V un espacio vectorial de dimensión finita sobre un cuerpo K yf es una aplicación
f : A× A→ V
tal que, denotando pq := f(p, q) para cada (p, q) ∈ A× A se verifica:
1. −→pq +−→qr = −→pr, ∀p, q, r ∈ A.
2. Dados p ∈ A y ~v ∈ V , existe un único q ∈ A tal que −→pq = ~v.
Nota: se usarán las notaciones p+ ~v = q, −→pq = ~v y ~v = q − p indistintamente.
• El conjunto A se denota por P(Π) (puntos del espacio afín Π).
• El espacio vectorial V se denota por V L(Π) (vectores libres del espacio afín Π).
• Dados p, q ∈P(Π), al vector −→pq ∈ V L(Π) lo llamaremos vector de origen p y extremo q.
Ejemplo 1. Veamos dos ejemplos de espacios afines:
1. En el conjuntoA = R2 podemos definir una estructura de espacio afín sobre el espacio vectorialV = vectores libres de R2, f : R2 × R2 → V definida por f((p1, p2), (q1, q2)) = −→pq =(q1 − p1, q2 − p2).
2. Generalizando el ejemplo anterior, en el conjunto A = Rn podemos definir una estructura deespacio afín sobre el espacio vectorial V = vectores libres de Rn, f : Rn × Rn → V definidapor f(p, q) = −→pq.
3.6.1. PropiedadesDado un espacio afín Π. Para todo p, p′, q, q′ ∈P(Π) y para todo ~v,~v′ ∈ V L(Π) se verifica:
1. −→pq =−→pq′ ⇔ q = q′.
2. −→pp = 0.
3. −→pq = 0⇔ p = q.
4. p(p+ ~v) = ~v.
5. p+−→pq = q.
6. p+ ~v = p⇔ ~v = ~0.
7. p+ ~v = p+ ~v′ ⇔ ~v = ~v′.
8. (p+ ~v) + ~v′ = p+ (~v + ~v′).
9. (p+ ~v)(p+ ~v′) = ~v′ − ~v.

142 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
10. (p+ ~v)(q + ~v) = −→pq
Definición 2. Se denomina dimensión del espacio afín a la dimensión de V .
Definición 3. Notaremos por q = p+ ~v al único punto q que cumple
q = p+ ~v ⇔ −→pq ⇔ ~v
Definición 4. Llamaremos subespacio afín (o variedad afín) de dimensión r de V L(Π) que pasa porp y tiene la dirección W al subconjunto
p+W = {p+ ~w|~w ∈ W}
• Si dim(W ) = 1, se dice que p+W es una recta que pasa por p y tiene dirección W .
• Si dim(W ) = 2, se dice que p+W es un plano que pasa por p y tiene dirección W .
• Si la dimensión del subespacio vectorial suplementario es 1, se dice que p+W es un hiperplanoafín.
Definición 5. Dado el subespacio afín p + W , si q ∈ p + W , las siguientes definiciones son equiva-lentes:
1. q está sobre p+W .
2. p+W pasa por q.
3. p+W contiene a q.
Proposición 1. Dado Π un espacio afín y p+ U un subespacio afín suyo, entonces
p+ U = {q|−→pq ∈ U} ⊆P(Π)
Proposición 2. Dado Π un espacio afín y p′+U0 un subespacio afín suyo, entonces, si p y q ∈P(Π),se tiene que:
1. Si p, q ∈ p0 + U0, entonces −→pq ∈ U0.
2. Si q ∈ p0 + U0 entonces q + U0 = p0 + U0.
Proposición 3. Dados dos subespacios afines p1 + U1 y p2 + U2 de un espacio afín Π, se tiene
p1 + U1 ⊆ p2 + U2 ⇔{U1 ⊆ U2−−→p1p2 ∈ U
Los subespacios serán iguales si y solo si −−→p1p2 ∈ U1 = U2.
Definición 6. Se denomina rango de un conjunto de puntos {p0, p1, . . . , pn} al rango del conjunto devectores {−−→p0p1,−−→p0p2, . . . ,−−→p0pn}.
• Si el conjunto de vectores es independiente, el conjunto de puntos se dice afínmente indepen-dientes.

3.6. ESPACIO AFÍN 143
• Si el espacio afín es de dimensión n se denomina referencia afín o sistema de referencia afín enΠ a
{p0, p1, . . . , pn} ⊆P(Π)
talque {−−→p0p1,−−→p0p2, . . . ,−−→p0pn} es una base de V L(Π).
Definición 7. Se denomina coordenadas afines de p respecto a la referencia afín dada, al vector(α1, . . . , αn) tal que:
p = p0 + α1−−→p0p1 + α2
−−→p0p2 + · · ·+ αn−−→p0pn
• En Rn, se denominará sistema de referencia canónico o usual al formado por el origen decoordenadas y los extremos de los vectores de la base canónica.
Proposición 4. La intersección de subespacios afines es un subespacio afín, esto es, dada la familia{Ai = pi + Ui}, tenemos que
⋂Ai = p +
⋂Ui es un subespacio donde p es un punto cualquiera de
la intersección.
Definición 8. Dos subespacios afines de un espacio afín Π se dicen que son paralelos si
A = p+ U y B = q +W son paralelos si{A ∩B = ∅U ⊂ W ó W ⊂ U
es decir, una dirección está contenida en la otra, pero no hay puntos en común.(Algunas veces se suprime la condicion A ∩B = ∅)
Definición 9. Sea B un subconjunto de puntos. Se denomina subespacio afín generado por B, L(B)al menor subespacio afín que contiene a B
L(B) = p+ U siendo p ∈ B U =< −→pq : q ∈ B >
Definición 10. Se define la suma de un conjunto de subespacios afines, como el menor subespacioafín que los contiene.
Proposición 5. La intersección de dos subespacios p+U y q+W es no vacía si y solo si−→pq ∈ U+W .
Proposición 6. Dado dos subespacios afines p+ U y q +W , el subespacio suma será
1. r + (U +W ) si (p+ U) ∩ (q +W ) 6= ∅ siendo r ∈ (p+ U) ∩ (q +W ).
2. s+ (U +W+ < −→pq >) si (p+ U) ∩ (q +W ) = ∅ siendo s ∈ (p+ U) ∪ (q +W ).
Proposición 7. Dados dos subespacios afines p+ U y q +W , tenemos que:
dim(p+ U) + dim(q +W ) = dim[(p+ U) + (q +W )] + dim[(p+ U) ∩ (q +W )]
Proposición 8. Sea Π un espacio afín. Dados dos puntos distintos p y q, tenemos que solo pasa unaúnica recta q+ < −→pq >, por dichos puntos, denotada por −→pq.

144 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Corolario Cada par de rectas distintas de un espacio afín se cortan a lo sumo en un punto.
Definición 11. Un espacio afín Π = (A, V, f) se dirá euclídeo si V es un espacio vectorial euclídeo(espacio vectorial donde se ha definido un producto escalar).
Ejemplo 2. En el espacio afín R4 y en el sistema de referencia canónico, se consideran los subes-pacios
F1 = {(x1, x2, x3, x4) ∈ R4 : x1 + x2 = 4, x3 + x4 = a}y
F2 = {(3 + λ, 2− 2λ, 2λ,−1 + λ) : λ ∈ R}y a ∈ R.
1. Calcula la dimensión de cada uno de los subespacios. Escríbelos de la forma p+W .
2. Determina a para que el subespacio afín F1 + F2 tenga dimensión mínima. Calcula dichosubespacio.
1. Para el subespacio afín F1, resolvemos el sistema de ecuaciones lineales, resultando x1 = α,x2 = 4− α, x3 = β y x4 = a− β. Por tanto,
F1 = p+ V1 = (0, 4, 0, a) + 〈(1,−1, 0, 0), (0, 0, 1,−1)〉
La dimensión de F1 es por tanto, 2 (plano afín). Igualmente hacemos con F2.
F2 = q + V2 = (3, 2, 0,−1) + 〈(1,−2, 2, 1)〉
La dimensión de F2 es por tanto, 1 (recta afín).2. El subespacio vectorial asociado a la suma F1 + F2 será V1 + V2 ó V1 + V2+ < pq >. Para que seade dimensión mínima, tendríamos que tener
−→pq ∈ V1 + V2
Determinemos entonces V1 + V2. Uniendo las bases de ambos subespacios vectoriales tendremos unsistema generador de dicha suma. Pero como
rang
1 −1 0 00 0 1 −11 −2 2 1
∣∣∣∣∣∣1 −1 00 0 11 −2 2
∣∣∣∣∣∣ = −1 + 2 = 1 6= 0
los vectores de V1 y V2 son independientes. El vector−→pq es (3,−2, 0,−1−a) y para que−→pq ∈ V1+V2,se debe cumplir∣∣∣∣∣∣∣∣
1 −1 0 00 0 1 −11 −2 2 13 −2 0 −1− a
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣1 −1 0 00 0 1 01 −2 2 33 −2 0 −1− a
∣∣∣∣∣∣∣∣ = −
∣∣∣∣∣∣1 −1 01 −2 33 −2 −1− a
∣∣∣∣∣∣ = −
∣∣∣∣∣∣1 0 01 −1 33 1 −1− a
∣∣∣∣∣∣ =
= −∣∣∣∣−1 3
1 −1− a
∣∣∣∣ = −(1 + a− 3) = 2− a = 0⇒ a = 2
De este modo tenemos que
F1 + F2 = p+ (V1 + V2) = (0, 4, 0, 4)+ < (1,−1, 0, 0), (0, 0, 1,−1), (1,−2, 2, 1) >
3.6. ESPACIO AFÍN 145
3.6.2. Transformaciones afines y afinidadesDefinición 12. Sean Π y Π′ dos espacios afines sobre un mismo cuerpo K Se dice que θ : P(Π) →P(Π′), biyectiva, es una transformación afín si existe un isomorfismo
T : V L(Π)→ V L(Π′)
talque θ(q) = θ(p) + T (pq).
• Si Π = Π′, se dice que es una afinidad.
• Si θ(p) = p diremos que p es un punto invariante, doble o fijo.
• Por ejemplo, una traslación o una rotación son transformaciones afines.
3.6.3. Representación matricial de una afinidadDada la afinidad θ : P(Π) → P(Π) definida por θ(q) = θ(p) + T (pq) y sean (x1, x2, . . . , xn) e(y1, y2, . . . , yn) las coordenadas de los puntos X e Y = θ(X).Si M = (aij)
ni,j=1 es la matriz asociada a T en la base {e1, e2, . . . , en} con ei = p0pi, entonces la
representación matricial de la afinidad θ es:1y1y2...yn
=
1 0 0 · · · 0b1 a11 a12 · · · a1nb2 a21 a22 · · · a2n...
...... . . . ...
bn an1 an2 · · · ann
1x1x2...xn
donde (b1, b2, . . . , bn) se calcula a partir de la imagen de un punto cualquiera.
Ejemplo 3. Dada la afinidad θ(x1, x2, x3) = (y1, y2, y3), dada por:y1 = x2y2 = x1 + x2 + x3 + 1y3 = x1 + x2 − 2
en forma matricial tenemos: 1y1y2y3
=
1 0 0 00 0 1 01 1 1 1−2 1 1 0
1x1x2x3
el vector (0, 1,−2) ha sido determinado a partir de x1 = 0, x2 = 0 y x3 = 0.
3.6.4. MovimientosDefinición 13. Dado un espacio afín euclideo (provisto de un producto escalar). Una afinidad θ sellama movimiento si conserva las distancias entre puntos, es decir, si
d(θ(p), θ(q)) = d(p, q), ∀p, q ∈P(Π)

146 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Nótese que si θ es un movimiento, entonces T es un isomorfismo en el espacio vectorial euclideoV L(Π) que conserva la longitud de los vectores ya que,
||T (pq)|| = ||θ(p)θ(q)|| = d(θ(p), θ(q)) = d(p, q) = ||pq||
Nota: para que sea un movimiento, la matriz asociada a la afinidad debe ser ortogonal, es decirMM t = I .La afinidad de ecuaciones 1
y1y2
=
1 0 00 0 −11 −1 0
1x1x2
es un movimiento.Para ello comprobamos que
M =
(0 −1−1 0
)es ortogonal, es decir, MM t = I2:(
0 −1−1 0
)(0 −1−1 0
)=
(1 00 1
)Definición 14. Una traslación es una afinidad f con la aplicación identidad como isomorfismo aso-ciado. En R2, dado el vector v = (v1, v2) la ecuación será
1y1y2
=
1 0 0v1 1 0v2 0 1
1x1x2x3
y en R3
1y1y2y3
=
1 0 0 0v1 1 0 0v2 0 1 0v3 0 0 1
1x1x2x3
(No tienen puntos invariantes)
Definición 15. Una homotecia es una afinidad con aplicacion kI . El único punto invariante se deno-mina centro de la homotecia. Si p = (p1, p2, p3) es el centro de la homotecia, tenemos
1y1y2y3
=
1 0 0 0
(1− k)p1 k 0 0(1− k)p2 0 k 0(1− k)p3 0 0 k
1x1x2x3
• Si k = 1 entonces la homotecia es la transformación identidad.
• Si k = −1 entonces la homotecia es una simetría central de centro p.
• En otro caso, no es un movimiento.

3.6. ESPACIO AFÍN 147
Definición 16. • DadaM matriz ortogonal asociada a un movimiento, se dice que el movimientoes directo si |M | = 1, es decir, conserva la orientación.
• Dada M matriz ortogonal asociada a un movimiento, se dice que el movimiento es inverso si|M | = −1, es decir, no conserva la orientación.
3.6.5. Movimientos en R2. Matrices ortogonales asociadas1. Aplicación identidad o traslación (según existencia puntos fijos).(
1 00 1
)2. Simetría de eje paralelo al eje determinado por u1, o simetría seguida por una traslación del
vector paralelo a dicho eje (simetría deslizante), según puntos fijos.(1 00 −1
)3. Giro de ángulo α y centro el único punto fijo asociado(
cosα − senαsenα cosα
)4. Simetría respecto de un punto o o giro de ángulo π(
−1 00 −1
)
Ejemplo 4. Con respecto al sistema de referencia usual {o, e1, e2} en R2 se considera M , ungiro de 45◦ grados que transforma el (0, 0) en el (1, 1−
√2). Determina la matriz asociada a
dicho movimiento, calculando el centro de giro.La matriz del giro ortogonal es: (
cos 45◦ − sen 45◦
sen 45◦ cos 45◦
)La ecuación matricial de la transformación es 1
x′
y′
=
1 0 0b1 cos 45◦ − sen 45◦
b2 sen 45◦ cos 45◦
1xy
donde se determinarán b1, b2 ya que se sabe que el punto (0, 0) se transforma en el (1, 1 −
√2).
Entonces se tiene: 11
1−√
2
=
1 0 0b1 cos 45◦ − sen 45◦
b2 sen 45◦ cos 45◦
100
⇒ {b1 = 1
b2 = 1−√
2

148 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
La matriz de este movimiento es:
A =
1 0 01 cos 45◦ − sen 45◦
1−√
2 sen 45◦ cos 45◦
El centro de giro del movimiento (p1, p2) es un punto fijo, por lo cual hay que resolver: 1
p1p2
=
1 0 01 cos 45◦ − sen 45◦
1−√
2 sen 45◦ cos 45◦
1p1p2
⇒ {p1 = 1 + 1√
2p1 − 1√
2p2
p2 = 1−√
2 + 1√2p1 + 1√
2p2⇒
⇒ 1√2p2 = 1 +
1−√
2√2
p1 ⇒ p2 =(
1−√
2)p1 +
√2
p2 = 1−√
2 +1√2p1 +
1√2p2 ⇒
(1−√
2)p1 +
√2 = 1−
√2 +
1√2p1+
+1√2
[(1−√
2)p1 +
√2]⇒(√
2− 2)p1 + 2 =
√2− 2 + p1 +
(1−√
2)p1 +
√2⇒
⇒√
2p1 − 2p1 − p1 − p1 +√
2p1 = 2√
2− 4⇒ 2√
2p1 − 4p1 = 2√
2− 4⇒ p1 = 1
p2 = 1−√
2 +√
2 = 1
Dando como resultado (1, 1).
Resultados en R2
1. Todo movimiento directo es la identidad, una traslación o un giro.
2. Todo movimiento inverso es una simetría o una simetría deslizante.
3. Si un movimiento tiene más de un punto fijo es una identidad o una simetría.
4. Si un movimiento tiene más de un punto fijo y es directo, es la identidad.
5. Si un movimiento tiene más de un punto fijo y es inverso es una simetría.
6. La composición de un giro y una traslación es otro giro del mismo ángulo.
7. La composición de una simetría y un giro cuyo centro está en el eje de simetría es otra simetría.
8. La composición de una simetría y una traslación es una simetría o una simetría deslizante.
3.6.6. Movimientos en R3. Matrices ortogonales asociadas1. Aplicación identidad o traslación (según existencia de puntos fijos).1 0 0
0 1 00 0 1

3.6. ESPACIO AFÍN 149
2. Simetría respecto al plano < u1, u2 >, o simetría deslizante1 0 00 1 00 0 −1
3. Giro de ángulo α alrededor del eje determinado por u1 o rotación y traslación.1 0 0
0 cosα − senα0 senα cosα
4. Simetria axial respecto a un eje paralelo a u1 o simetria más traslación.1 0 0
0 −1 00 0 −1
5. Rotación de ángulo α alrededor de un eje paralelo a u1 seguida de una simetría respecto a un
plano paralelo al plano < u2, u3 >.−1 0 00 cosα − senα0 senα cosα
6. Simetría central respecto de algún punto en el espacio. (α = π)−1 0 0
0 −1 00 0 −1
Resultados en R3
1. Si el movimiento es directo, es una identidad, traslación, rotación alrededor de un eje o movi-miento helicoidal.
2. Si el movimiento es inverso, es una simetría respecto a un plano, simetría deslizando o la com-posición de un giro y una simetría.
3. Si el movimiento es un giro, para calcular el ángulo de giro podremos utilizar que la traza esinvariante por semejanza.
4. También, en este último caso, se puede calcular el ángulo que forman un vector perpendicularal eje de giro y su imagen (usando la definición dada en producto escalar).
Ejemplo 5. Clasifica el movimiento de ecuaciones: 1y1y2
=
1 0 0
0√
32−1
2
1 12
√3
2
1x1
x2

150 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Primeramente verificamos que es un movimiento comprobando que la matriz
M =
(√32−1
212
√32
)es ortogonal, bien porque sus filas constituyan una base ortonormal o bien comprobando queMM t =I2 (√
32−1
212
√32
)( √32
12
−12
√32
)=
(34
+ 14
√34−√34√
34−√34
14
+ 34
)=
(1 00 1
)Calculamos su polinomio característico:
p(λ) = |M − λI2| =
∣∣∣∣∣√32− λ −1
212
√32− λ
∣∣∣∣∣ =
(√3
2− λ
)2
+1
4=
3
4−√
3λ+ λ2 +1
4
siendo p(λ) = λ2 −√
3λ+ 1. Calculamos sus raíces
λ =
√3±√
3− 4
2=
1
2
√3± i
El polinomio característico no tiene raíces reales, lo cual confirma que es un giro, ya que es la únicatransformación ortogonal en R2 que puede tener valores propios complejos. Comparando la matrizM con la general de un giro (√
32−1
212
√32
)=
(cosα − senαsenα cosα
)vemos que
cosα =
√3
2y senα =
1
2y entonces deducimos que α = π
6. Nos queda estudiar sus puntos fijos.1 0 0
0√32−1
2
1 12
√32
1xy
=
1xy
⇒ { √32x− 1
2y = x
1 + 12x+
√32y = y
⇒{ √
3x− y = 2x
2 + x+√
3y = 2y⇒
⇒ y =√
3x− 2x; 2 + x+ 3x− 2√
3x = 2√
3x− 4x⇒ 8x− 4√
3 = −2⇒ x =1
2(√
3− 2)
y =√
3x− 2x⇒ y =
√3
2(√
3− 2)− 2
2(√
3− 2)=
√3− 2
2(√
3− 2)=
1
2= y
Por tanto, el centro del giro es
x =1
2(√
3− 2), y =
1
2
Ejemplo 6. Estudia la afinidad 1y1y2
=
1 0 01 0 −11 −1 0
1x1
x2

3.6. ESPACIO AFÍN 151
Primeramente verificamos que la afinidad es un movimiento. Para que la afinidad sea un movi-miento el isomorfismo asociado tiene que ser una transformación ortogonal. Para ello la matriz
M =
(0 −1−1 0
)debe ser ortogonal. En efecto sus columnas forman una base ortonormal de R2.
También podemos comprobar que MM t = I2:(0 −1−1 0
)(0 −1−1 0
)=
(1 00 1
)Calculamos el polinomio característico
p(λ) = |M − λI2| =∣∣∣∣−λ −1−1 −λ
∣∣∣∣ = λ2 − 1
Con raíces ±1. Es una simetría o simetría deslizante, según existan puntos fijos. Calculamos el ejevectorial de la simetría
P1 = Ker(M − I2) =
{(x, y) ∈ R2 :
(−1 −1−1 −1
)(xy
)=
(00
)}={
(x, y) ∈ R2 : x+ y = 0}
=
= 〈(−1, 1)〉
La recta afín será de la forma x+ y = k. Resolvemos la ecuación de puntos fijos1 0 01 0 −11 −1 0
1xy
=
1xy
⇒ {1− y = x1− x = y
obtenemos el eje afín de la simetría x+ y = 1.Otra forma de calcular el eje afín sería plantear el sistema1 0 0
1 0 −11 −1 0
1x
k − x
=
1x
k − x
⇒ {1− k + x = x1− x = k − x
y resolviendo nos sale k = 1.
Ejemplo 7. Estudia la afinidad 1y1y2
=
1 0 02 0 −10 −1 0
1x1
x2
Realizando el mismo estudio obtenemos que es una simetría, con eje vectorial x+ y = 0. Si analiza-mos los puntos fijos con la ecuación1 0 0
2 0 −10 −1 0
1xy
=
1xy
⇒ {2− y = x−x = y

152 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
no obtenemos solución. Existe por tanto, además, una traslación. Repitiendo el razonamiento, el ejeafín es de la forma x+ y = k, por tanto1 0 0
2 0 −10 −1 0
1x
k − x
=
12− k + x−x
Como tiene que ser también un punto de la recta, entonces (2− k + x) + (−x) = k, de donde k = 1y el eje de simetría es x+ y + 1.Calculemos el vector traslación. Tomamos un punto cualquiera de la recta de simetría, por ejemplop =
(12, 12
), que cumple 1
2+ 1
2= 1 y calculamos su imagen1 0 0
2 0 −10 −1 0
11212
=
132
−12
Por tanto el vector será (
3
2,−1
2
)−(
1
2,1
2
)= (1,−1)
Ejemplo 8. Encuentra en la base canónica deR2, la matriz de la simetría ortogonal con respectoa la recta 2x− y = 0.Primeramente buscamos una base ortonormal. Trabajamos por tanto con el vector director de la recta(1, 2) y normalizamos para definir
~u :=
(1√5,
2√5
)Completamos con un vector perpendicular, también normalizado
~v =
(− 2√
5,
1√5
)
La matriz de la simetría en la base B = {~u,~v} será(
1 00 −1
). La matriz de paso P =
(1√5− 2√
52√5
1√5
)refleja el cambio de base hacia la base B. Por tanto, teniendo en cuenta el esquema
R2 −→ R2 f−→ R2 −→ R2
C 1a B 2a B 3a C
la matriz de la simetría en la base canónica será:
MC(f) = PBCMB(f)PCB = PBCMB(f)P−1BC
P
(1 00 −1
)P−1 =
(1√5− 2√
52√5
1√5
)(1 00 −1
)( 1√5
2√5
− 2√5
1√5
)=
(1√5
2√5
2√5− 1√
5
)(1√5
2√5
− 2√5
1√5
)=
=
(15− 4
525
+ 25
25
+ 25
45− 1
5
)=
(−3
545
45
35
)=
1
5
(−3 44 3
)Nótese que por ser P ortogonal, P−1 = P t, ya que sus columnas forman una base ortonormal.

3.6. ESPACIO AFÍN 153
Ejemplo 9. Prueba que un giro en R2 de ángulo π3
que lleva el punto (2, 2) al punto (1,√3),
tiene por centro el punto (√3, 1), dadas las coordenadas en el sistema de referencia canónico.
La matriz de giro es de la forma1 0 0a cos π
3− sen π
3
b sen π3
cos π3
=
1 0 0
a 12−√32
b√32
12
Calculamos a y b mediante la imagen que nos da el enunciado1 0 0
a 12−√32
b√32
12
122
=
11√3
⇒ {a+ 1−
√3 = 1
b+√
3 + 1 =√
3
dando como resultado a =√
3 y b = −1. La matriz del giro queda entonces 1 0 0√3 1
2−√32
−1√32
12
Por último se plantea la ecuación de puntos fijos para comprobar el resultado del centro 1 0 0√
3 12−√32
−1√32
12
1xy
=
1xy
⇒ { √3 + 1
2x−
√32y = x
−1 +√32x+ 1
2y = y
⇒{
2√
3 + x−√
3y = 2x
−2 +√
3x+ y = 2y⇒
⇒ x = 2√
3−√
3y; −2 +√
3(
2√
3−√
3y)
+ y = 2y ⇒ −2 + 6− 3y + y = 2y ⇒
⇒ 4y = 4⇒ y = 1; x =√
3
Por lo que el centro es (√
3, 1) tal y como nos pide probar el ejercicio.
Ejemplo 10. Determina a para que la siguiente transformación sea un movimiento y clasifícalo.1y1y2y3
=
1 0 0 01 a
2a2− 1√
2
1 a2
a2
1√2
1 1√2− 1√
20
1x1
x2
x3
Para que sea movimiento la matriz
M =
a2
a2− 1√
2a2
a2
1√2
1√2− 1√
20
debe cumplir que MM t = I3. De este modo
a2
a2− 1√
2a2
a2
1√2
1√2− 1√
20
a2
a2
1√2
a2
a2− 1√
2
− 1√2
1√2
0
=
a2
4+ a2
4+ 1
2a2
4+ a2
4− 1
2− a
2√2
+ a2√2
a2
4+ a2
4− 1
2a2
4+ a2
4+ 1
2a
2√2− a
2√2
a2√2− a
2√2
a2√2− a
2√2
12
+ 12
=
=
a2
2+ 1
2a2
2− 1
20
a2
2− 1
2a2
2+ 1
20
0 0 1
=
1 0 00 1 00 0 1

154 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Por tanto a2
2− 1
2= 0, lo cual implica que a = ±1.
Caso a) a = 1. La matriz de la transformación ortogonal es
A =
12
12− 1√
212
12
1√2
1√2− 1√
20
Si calculamos su polinomio característico, obtenemos
p(λ) = |A− λI3| =
∣∣∣∣∣∣∣12− λ 1
2− 1√
212
12− λ 1√
21√2
− 1√2−λ
∣∣∣∣∣∣∣ = −λ(
1
2− λ)2
+1
4+
1
4+
1
2
(1
2− λ)
+1
4λ+
+1
2
(1
2− λ)
= −λ(
1
4− λ+ λ2
)+
1
2+
1
4− 1
2λ+
1
4λ+
1
4− 1
2λ = −λ3 + λ2 − 1
4λ− 3
4λ+
+ 1 = −λ3 + λ2 − λ+ 1
La ecuación característica es p(λ) = λ3 − λ2 + λ− 1 = 0. Calculamos sus raíces:
1 −1 1 −11 1 0 1
1 0 1 0⇒ λ2 + 1 = 0⇒ λ = ±i
Por lo que al factorizar el polinomio característico queda p(x) = (x−1)(x2 +1) con raíces 1 y±i. Setrata por tanto de una rotación ya que uno de los vectores de la base ortonormal permanece invariantey sobre el plano ortogonal se produce un giro. Para calcular el eje vectorial de giro, calculamosP1, obteniendo < (1, 1, 0) >. Calculamos el ángulo de rotación mediante la igualdad de trazas:1 + 2 cosα = 1, por tanto cosα = 0. Para determinar qué ángulo es de los dos posibles, establecemosuna base ortogonal a partir del eje obtenido anteriormente orientada positivamente
B = {(1, 1, 0), (0, 0, 1), (1,−1, 0)}
Como la imagen de (0, 0, 1) es(1/√
2,−1/√
2, 0)
= 0(0, 0, 1) + 1/√
2(1,−1, 0) nos indica queα = π/2.El eje vectorial era x− y = 0. Tenemos que calcular el eje afín de rotación x− y = r.
A
1
r + yys
=
1
1 + 12
+ r2
+ s√2
+ y
1 + r2− s√
2+ y
1− r√2
Su solución es x− y =
√2/2, z = 1/2 o bien
(x, y, z) =
(√2
2, 0,
1
2
)+ < (1, 1, 0) >
Para determinar el vector traslación se toma la diferencia entre un punto de la recta y su transformadopor el movimiento
si p =
(√2
2, 0,
1
2
), su transformado será
(1 +
√2
2, 1,
1
2
)

3.6. ESPACIO AFÍN 155
por tanto, el vector traslación será v = (1, 1, 0).Caso b) a = −1. En este caso las raíces del polinomio característico son −1,±i. Es una rotaciónseguida de una simetría. Calculamos el eje vectorial de rotación calculando P−1 = 〈(1, 1, 0)〉. Calcu-lamos el ángulo de rotación mediante la traza: cosα = 0. Completamos una base ortogonal orientadapositivamente, B = {(1, 1, 0), (0, 0, 1), (1,−1, 0)} y calculamos la imagen de (0, 0, 1) siendo
(1/√
2,−1/√
2, 0) = 0(0, 0, 1) + 1/√
2(1,−1, 0)
nos indica que β = π/2. El plano de simetría será < (0, 0, 1), (1,−1, 0) >. Calculamos el únicopunto fijo que tiene el movimiento
A
1xyz
=
1xyz
Resultando p =
(14(2 +
√2), 1
4(2−
√2), 1
2
).
Por tanto, el eje de rotación y el plano de simetría afín serán, respectivamente:
(x, y, z) =
(1
4(2 +
√2),
1
4(2−
√2),
1
2
)+ < (1, 1, 0) >
(x, y, z) =
(1
4(2 +
√2),
1
4(2−
√2),
1
2
)+ < (0, 0, 1), (1,−1, 0) >
Ejemplo 11. Dados los siguientes subespacios afines
A = {(x, y, z, t) = (3, 1, 0, 3) + α(1, 0, 0, 1)}
B = {(x, y, z, t) ∈ R4 : y − t = 1, x = z}
1. Obtenga una base del subespacio vectorial asociado y la dimension de cada uno de lossubespacios afines.
2. Estudie la posición relativa de ambos subespacios determinando la intersección.
3. Escriba la ecuación de un plano paralelo al subespacioA.
A = p+ U = (3, 1, 0, 3)+ < (1, 0, 0, 1) >, por tanto la dimensión es 1, recta afín. B = q + V =(0, 1, 0, 0)+ < (0, 1, 0, 1), (1, 0, 1, 0) >, por tanto la dimensión es 2, plano afín.
pq = (−3, 0, 0,−3) = −3(1, 0, 0, 1) + 0(0, 1, 0, 1) + 0(1, 0, 1, 0) ∈ U + V → U ∩ V 6= ∅
La intersección vendra dada por:
(3, 1, 0, 3) + α(1, 0, 0, 1) = (0, 1, 0, 0) + t(0, 1, 0, 1) + s(1, 0, 1, 0)
resultando que sólo tienen el punto (0, 1, 0, 0) en común.Un posible plano paralelo al subespacio A se conseguirá extendiendo la base de A a dimensión 2 ytomando un punto distinto a p, por ejemplo,
C = (3, 1, 3, 0)+ < (1, 0, 0, 1), (0, 1, 0, 0) >

156 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Ejemplo 12. Demuestra que la siguiente transformación afín, con ecuaciones en el sistema dereferencia canónico representa una simetría respecto del plano x+ z = −2.
y1 = −2− x3
y2 = x2
y3 = −2− x1
Escrito de forma matricial nos queda:1y1y2y3
=
1 0 0 0−2 0 0 −10 0 1 0−2 −1 0 0
1x1x2x3
Calculando MM t = I3 comprobamos que es un movimiento. Su polinomio característico seráp(x) = −x3 + x2 + x + 1 con raíces 1, doble y −1 simple. Calculamos el subespacio propioP1 =< (−1, 0, 1), (0, 1, 0) >, para calcular el plano vectorial, x + z = 0. El plano afín de simetríaserá por tanto x+ z = k, que, calculando su transformado, nos dará
A
1xy
k − x
=
1
−2− k + xy
−2− x
Como debe pertenecer al plano, aplicando la condición obtenemos k = −2, es decir, x + z = −2.Estudiamos las posibles traslaciones tomando la transformada de un punto cualquiera del plano
A
1−10−1
=
1−10−1
Como no hay cambio, no existe traslación.
3.7. Cónicas y cuádricas
3.7.1. Cónicas
Definición 17. Una cónica es el lugar geométrico de los puntos que resultan de la intersección en R3
de un cono generalizado y un plano. La ecuación de una cónica es del tipo:
Ax2 + 2Bxy + Cy2 + 2Dx+ 2Ey + F = 0
en la que los coeficientes A, B, C, D, E y F son reales no todos nulos.

3.7. CÓNICAS Y CUÁDRICAS 157
Formás canónicas o reducidas
• Elipsex2
a2+y2
b2− 1 = 0
• Elipse imaginariax2
a2+y2
b2+ 1 = 0
• Puntox2
a2+y2
b2= 0
• Hipérbolax2
a2− y2
b2− 1 = 0
• Puntox2
a2− y2
b2= 0
• Parábolas {y2 − 2px = 0x2 − 2py = 0
• Par de rectas reales paralelasx2 − a2 = 0
• Par de rectas imaginarias paralelasx2 + a2 = 0
• Par de rectas reales coincidentesx2 = 0
• Rectaax+ by + c = 0
Clasificación ortogonal de las cónicas
Definición 18. Una cónica se dice degenerada si se puede reducir a un punto o a un par de rectasreales que se cortan en un punto o coincidentes.
La ecuación general de una cónica se puede escribir de forma matricial como:
(x y
)(A BC D
)(xy
)+ 2
(D E
)(xy
)+ F = 0
Observamos que la matriz (A BC D
)

158 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
es simétrica y define una forma cuadrática en R2, por lo tanto diagonalizable ortogonalmente (auto-vectores). Por lo tanto según la nueva base ortonomal,(
u v)(λ 0
0 µ
)(uv
)+ 2
(D E
)P
(uv
)+ F = 0
siendo λ y µ los autovalores reales de la matriz(A BC D
)y P la matriz ortogonal de paso.
(u v
)= P
(xy
)⇒(x y
)= P t
(uv
)Operando obtenemos:
λu2 + µv2 +Mu+Nv + F = 0
Posibilidades:a) Los dos autovalores son distintos de ceroCompletando cuadrados, nos queda la expresión:
λ
(u+
M
2λ
)2
+ µ
(v +
N
2µ
)2
+
(F − M2
4λ− N2
4µ
)= 0
Si realizamos el siguiente cambio de variable:
r = u+M
2λs = v +
N
2µK = F − M2
4λ− N2
4µ
obtenemosλr2 + µs2 +K = 0
La expresión obtenida es analizada según las ecuaciones de las cónicas vistas anteriormente,
1. Signo(λ) = Signo(µ) = Signo(K)⇒ Elipse imaginaria.
2. Signo(λ) = Signo(µ) 6= Signo(K)⇒ Elipse.
3. Signo(λ) 6= Signo(µ)⇒ Hipérbola.
b) Un autovalor es cero, por ejemplo λ = 0Completando cuadrados obtenemos:
µ
(v +
N
2µ
)2
+Mu+
(F − N2
4µ
)= 0
Si realizamos el siguiente cambio de variable
s = v +N
2µL = F − N2
4µ
obtenemosλs2 +Mu+ L = 0
Analizando la expresión obtenida, obtenemos:

3.7. CÓNICAS Y CUÁDRICAS 159
1. Si M 6= 0⇒ Parábola.
2. Si M = 0 y Signo(µ) 6= Signo(L)⇒ Rectas paralelas.
3. Si M = 0 y Signo(µ) = Signo(L)⇒ Rectas imaginarias.
c) Si los dos autovalores son ceroLa ecuación general nos queda como
2Dx+ 2Ey + F = 0
que es una recta.
Ejemplo 13. Clasifique la siguiente cónica:
x2 + y2 − 6xy + 4x+ 4y = 0
Escrita en forma matricial sería de la forma:(x y
)( 1 −3−3 1
)(xy
)+ 2
(2 2
)(xy
)= 0
A continuación diagonalizamos ortogonalmente la matriz simétrica M =
(1 −3−3 1
). Calculamos
el polinomio característico:
p(λ) = |M − λI2| =(
1− λ −3−3 1− λ
)= (1− λ)2 − 9 = 1− 2λ+ λ2 − 9 = λ2 − 2λ− 8
Caculamos las raíces:
λ =2±√
4 + 4 · 82
=2±√
36
2=
2± 6
2; λ = −2, µ = 4
Calculamos los subespacios propios asociados a los autovalores:
P−2 = Ker(M + 2I2) =
{(xy
)∈ R2 : (M + 2I2)
(xy
)=
(00
)}=
=
{(xy
)∈ R2 :
(3 −3−3 3
)(xy
)=
(00
)}=
{(xy
)∈ R2 : 3x− 3y = 0
}= 〈(1, 1)〉
P4 = Ker(M − 4I2) =
{(xy
)∈ R2 : (M − 4I2)
(xy
)=
(00
)}=
=
{(xy
)∈ R2 :
(−3 −3−3 −3
)(xy
)=
(00
)}=
{(xy
)∈ R2 : −3x− 3y = 0
}= 〈(−1, 1)〉
Una base de P−2 es el vector ~w1 = (1, 1) y del espacio propio P4 el vector ~w2 = (−1, 1). Después
de ortonormalizar, que en este caso es solo normalizar, se tiene que P =
(1√2− 1√
21√2
1√2
). De forma

160 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
que si llamamos (u, v) a las coordenadas de cualquier punto del plano en la nueva base ortonormal
B = {~w1, ~w2}, se verifica la relación(xy
)= P
(uv
), y la ecuación de la cónica queda
(u v
)(−2 00 4
)(uv
)+ 2
(2 2
)( 1√2− 1√
21√2
1√2
)(uv
)= 0
Al tener dos autovalores de distintos signo estamos ante una hipérbola.
Ejemplo 14. Clasifique ortogonalmente la cónica de ecuación
x2 + 4y2 − 6x− 8y − 3 = 0
Como en la ecuación no aparece ningún término de la forma xy, completamos cuadrados directa-mente (no es necesario aplicar lo anteriormente visto)
(x− 3)2 + 4(y − 1)2 − 16 = 0
Dividiendo por 16 y despejando, obtenemos
(x− 3)2
16+
(y − 1)2
4= 1
que corresponde a una elipse de centro (3, 1).
Ejemplo 15. Clasifique ortogonalmente la familia de cónicas de ecuación
αx2 + 2βxy + αy2 + (α+ β)(x+ y) + 1 = 0 α > β ≥ 0
En forma matricial nos queda:
(x y
)(α ββ α
)(xy
)+(α + β α + β
)(xy
)+ 1 = 0
Calculamos el polinomio característico:
p(λ) =
∣∣∣∣α− λ ββ α− λ
∣∣∣∣ = (α− λ)2 − β2 = α2 − 2αλ+ λ2 − β2 = λ2 − 2λα + α2 − β2
Las raíces del polinomio característico son
λ =2α±
√4α2 − 4α2 + 4β2
2=
2α±√
4β2
2= α± β
Por lo que la matriz tiene como autovalores λ1 = α + β y λ2 = α− β.Si β = 0 ya está diagonalizada, la ecuación de la cónica queda de la forma:
(x y
)(α 00 α
)(xy
)+(α α
)(xy
)+ 1 = 0

3.7. CÓNICAS Y CUÁDRICAS 161
con lo cual nos queda la expresión:
αx2 + αx+ αy2 + αy + 1 = 0
En este caso completando cuadrados tenemos que
α
(x+
1
2
)2
+ α
(y +
1
2
)2
+ 1− 1
2α = 0
Dividiendo por α y haciendo la traslación r = x+ 12, s = 1
2, nos queda
r2 + s2 +1
α− 1
2= 0
teniendo que:
• Si α = 2, tenemos un punto.
• Si α > 2, tenemos una circunferencia.
• Si 0 < α < 2, tenemos una circunferencia imaginaria.
Si β 6= 0, los valores propios son entonces λ1 = α + β y λ2 = α − β. Calculamos los subespaciospropios asociados:
Pα+β =
{(xy
)∈ R2 :
(α− α− β β
β α− α− β
)(xy
)=
(00
)}=
{(xy
)∈ R2 : βx− βy = 0
}
Pα−β =
{(xy
)∈ R2 :
(α− α + β β
β α− α + β
)(xy
)=
(00
)}=
{(xy
)∈ R2 : βx+ βy = 0
}Por tanto los vectores propios asociados a λ1 y λ2 son respectivamente ~u1 = (1, 1) y ~u2 = (−1, 1)
que normalizados proporcionan la base{(
1√2, 1√
2
),(− 1√
2, 1√
2
)}. Podemos definir la matriz P cu-
yas columnas son las coordenadas de los vectores de esta nueva base formada por vectores propios.
Haciendo entonces(xy
)= P
(uv
)la cónica queda
(u v
)(α + β 00 α− β
)(uv
)+(α + β α + β
)( 1√2− 1√
21√2
1√2
)(uv
)+ 1 = 0
Multiplicando:
(α + β)u2 + (α− β)v2 +2√2
(α + β)u+ 1 = 0
y completando cuadrados nos queda:
(α + β)
(u+
1√2
)2
+ (α + β)v2 − 1
2(α + β) + 1 = 0
Haciendo las traslaciones r = u+ 1√2, s = v, tenemos que:
(α + β)r2 + (α + β)s2 +
(1− α + β
2
)= 0
Por lo tanto:

162 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
• Si α + β = 2, es un punto.
• Si α + β < 2, es una elipse imaginaria.
• Si α + β > 2, es una elipse.
3.7.2. CuádricasSe denomina cuádrica al lugar geométrico de los puntos del espacio afín euclídeo cuyas coorde-
nadas satisfacen:
A1x2 + A2y
2 + A3z2 + 2B1xy + 2B2xz + 2B3yz + 2C1x+ 2C2y + 2C3z +D = 0
Expresada de forma matricial queda como:
(x y z
)A1 B1 B2
B1 A2 B3
B2 B3 A3
xyz
+ 2(C1 C2 C3
)xyz
+D = 0
Clasificación ortogonal de las cuádricas
Haciendo un cambio de base y diagonalizando ortogonalmente la matriz
A1 B1 B2
B1 A2 B3
B2 B3 A3
obte-
nemos (u v w
)α 0 00 β 00 0 γ
uvw
+ 2(C1 C2 C3
)P
uvw
+D = 0
siendo α, β y γ los autovalores de la matriz indicada y P la matriz de paso. Operando nos queda laecuación:
αu2 + βv2 + γw2 + E1u+ E2v + E3w +D = 0
Posibilidades:a) Todos los autovalores son distintos de ceroCompletando cuadrados, nos queda la expresión:
α
(u+
E1
2α
)+ β
(v +
E2
2β
)+ γ
(w +
E3
2γ
)+
(D − E2
1
4α− E2
2
4β− E2
3
4γ
)= 0
Sea F = D − E21
4α− E2
2
4β− E2
3
4γ.
a.2) Si F 6= 0En este caso podemos dividir toda la ecuación por F , obteniendo la siguiente ecuación:
d1r2 + d2s
2 + d3t2 = 1
1. Si di > 0 para i = 1, 2, 3, tenemos una elipsoide de revolución. En el caso de d1 = d2 = d3,tenemos una esfera.
2. Si d1 > 0, d2 > 0 y d3 < 0, tenemos un hiperboloide de una hoja.

3.7. CÓNICAS Y CUÁDRICAS 163
3. Si d1 > 0, d2 < 0 y d3 < 0 tenemos un hiperboloide de dos hojas.
a.1) Si F = 0En este caso la ecuación nos queda como:
αr2 + βs2 + γt2 = 0
1. Si Signo(α) = Signo(β) = Signo(γ), entonces la única solución es (0, 0, 0).
2. Si Signo(α) = Signo(β) 6= Signo(γ), la cuádrica es un cono.
b) Un autovalor es nulo, por ejemplo α, β 6= 0 y γ = 0La ecuación puede escribirse como
αu2 + βv2 + E1u+ E2v + E3w +D = 0
b.1) Si E3 6= 0→ αr2 + βs2 + E3t = 0Despejando t obtenemos:
t =r2
a2± s2
b2
• tomando el signo positivo, obtenemos un paraboloide elíptico.
• tomando el signo negativo, obtenemos un paraboloide hiperbólico.
b.2) Si E3 = 00→ αr2 + βs2 + F = 0En este caso obtenemos un cilindro cuya forma dependerá de la cónica proyectada en el plano (elip-tico, hiperbólico, o un par de planos o una recta si F = 0).c) Dos autovalores nulos, por ejemplo α 6= 0 y β = γ = 0La ecuación nos queda como:
αu2 + E1u+ E2v + E3w +D = 0
c.1) Si E2 = E3 = 0→ αr2 − k = 0
• si k > 0, tenemos dos planos paralelos.
• si k = 0, un plano.
• si k < 0, ningún punto verifica la ecuación de la cuádrica.
c.2) Si E2 6= E3 = 0→ αr2 + E2s = 0En este caso obtenemos un cilindro parabólico.c.3) Si E2 6= 0 6= E3
En este caso obtenemos, también, un cilindro parabólico.d) Todos los autovalores son nulosEn este caso, se corresponde con un plano si el conjunto es no vacío.

164 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Ejemplo 16. Clasifique ortogonalmente la cuádrica de ecuación
2x2 − 7y2 + 2z2 − 10xy − 8xz − 10yz + 6x+ 12y − 6z + 5 = 0
En forma matricial sería:
(x y z
) 2 −5 −4−5 −7 −5−4 −5 2
xyz
+ 2(3 6 −3
)xyz
+ 5 = 0
Calculamos los autovalores y la matriz de paso ortonomal asociada a la matriz
M =
2 −5 −4−5 −7 −5−4 −5 2
El polinomio característico es:
p(λ) = |M − λI3| =
∣∣∣∣∣∣2− λ −5 −4−5 −7− λ −5−4 −5 2− λ
∣∣∣∣∣∣ = (2− λ)2(−7− λ)− 100− 100 + 16(7 + λ)−
− 25(2− λ)− 25(2− λ) = (4− 4λ+ λ2)(−7− λ)− 200 + 112 + 16λ− 100 + 50λ = −28+
+ 28λ− 7λ2 − 4λ+ 4λ2 − λ3 + 66λ− 188 = −λ3 − 3λ2 + 90λ− 216
La ecuación característica es p(λ) = +λ3 + 3λ2 − 90λ+ 216 = 0. Determinamos los autovalores deT resolviendo la ecuación característica:
1 3 −90 2163 3 18 −216
1 6 −72 06 6 72
1 12 0−12 −12
1 0
⇒ p(λ) = (λ− 3)(λ− 6)(λ+ 12)
dando como resultado:
P =
1√6
√23
1√6
1√3− 1√
31√3
1√2
0 − 1√2
y λ = −12, β = 3 y γ = 6, es decir, los tres autovalores son no nulos. Realizando el cambio de base
(u v w
)−12 0 00 3 00 0 6
uvw
+ 2(3 6 −3
)P
uvw
+ 5 = 0
donde P es la matriz de paso antes indicada, obtenemos:
−12u2 + 4√
6u+ 3v2 − 4√
3v + 6w2 + 6√
2w + 5 = 0

3.7. CÓNICAS Y CUÁDRICAS 165
Completando cuadrados obtenemos:
−12
(− 1√
6+ u
)2
+ 3
(− 2√
3+ v
)2
+ 6
(1√2
+ w
)2
Como el término independiente es nulo, observamos los signos de los coeficientes de los términoscuadráticos.En este caso, por ser uno de ellos (−12) de distinto signo que los otros dos, la cuadrática es un cono.
Ejemplo 17. Clasifique ortogonalmente la cuadrática de ecuación
2x2 + y2 + z2 + 6yz − 4x− 2y − 4z + 6 = 0
En forma matricial sería:
(x y z
)2 0 00 1 30 3 1
xyz
+ 2(−2 −1 −2
)xyz
+ 6 = 0
Calculamos los autovalores y la matriz de paso ortonomal asociada a la matriz
M =
2 0 00 1 30 3 1
dando como resultado:
P =
0 − 1√2
1√2
1 0 00 1√
21√2
y λ = −2, β = 2 y γ = 4, es decir, los tres autovalores son no nulos.Realizando el cambio de base
(u v w
)−2 0 00 2 00 0 4
uvw
+ 2(−2 −1 −2
)P
uvw
+ 6 = 0
donde P es la matriz de paso antes indicada, obtenemos:
−2u2 + 2v2 + 4w2 −√
2u− 4v − 3√
2w + 6 = 0
Completando cuadrados obtenemos:
−2
(u+
2√4
)2
− 2(v − 1)2 + 4
(2− 3
√2
8
)2
+25
8= 0
De lo cual deducimos que la cuádrica es un hiperboloide de dos hojas.

166 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
3.8. Ejercicios tema 3
8. SeaV = R2 y f : V × V → R una forma bilineal dada por f(~v, ~v′) = xx′ + 2yy′ − xy′,donde ~v = (x, y), v′ = (x′, y′) son dos vectores cualesquiera de R2 en la base canónica. Cal-cule la matriz de f en la base canónica de R2. Obtenga, usando la definición, la matriz de f enla base B = {~u1, ~u2} donde ~u1 = (1, 1) y ~u2 = (1,−1). Muestre la relación existente entreambas matrices.La matriz de f en la base canónica es:
M = MC(f) =
(1 −10 2
)Obtengamos la matriz de f en la base B usando la definición:
f(~u1, ~u1) = f((1, 1), (1, 1)) = 1 + 2− 1 = 2f(~u1, ~u2) = f((1, 1), (1,−1)) = 1− 2 + 1 = 0f(~u2, ~u1) = f((1,−1), (1, 1)) = 1− 2− 1 = −2f(~u2, ~u2) = f((1,−1), (1,−1)) = 1 + 2 + 1 = 4
⇒MB(f) =
(2 0−2 4
)
La relación entre las matrices es MB(f) = P tMP . Siendo P la matriz de cambio de base de B aC, es decir, la matriz que tiene por columnas las coordenadas de los vectores de la base B en la base
canónica. Verifiquemos la relación entre las matrices. Tenemos que P =
(1 11 −1
). Y entonces
(1 11 −1
)(1 −10 2
)(1 11 −1
)=
(1 11 3
)(1 11 −1
)=
(2 0−2 4
)9. Sea f : R3 × R3 → R la forma bilineal cuya matriz en la base canónica de R3, C = {~e1,
~e2, ~e3}, es
0 0 10 0 01 0 1
. Encuentre una base ortogonal con respecto a f de R3, es decir, diago-
nalice f , usando vectores no isotrópicos.Elegimos un vector ~v1 ∈ R3 no isotrópico, es decir, tal que f(~v1, ~v1) 6= 0. Probamos, por ejemplo,con el vector ~e3: (
0 0 1)0 0 1
0 0 01 0 1
001
=(1 0 1
)001
= 1 6= 0
Entonces definimos ~v1 := (0, 0, 1). Cogemos ahora un vector no isotrópico del subespacio ortogonala ~v1, 〈~v1〉⊥ = {~u ∈ R3 : f(~v1, ~u) = 0}. Si ~u = (x, y, z), tenemos que
f(~v1, ~u) =(0 0 1
)0 0 10 0 01 0 1
xyz
= 0⇒ x+ z = 0⇒
x = αy = βz = −α
Por tanto 〈~v1〉⊥ = 〈(1, 0,−1), (0, 1, 0)〉. Probamos con el vector ~e2:
(0 1 0
)0 0 10 0 01 0 1
010
= 0

3.8. EJERCICIOS TEMA 3 167
Por lo que el vector ~e2 es isotrópico. Probamos con el vector (1, 0,−1):
(1 0 −1
)0 0 10 0 01 0 1
10−1
=(−1 0 0
) 10−1
= −1 6= 0
Por tanto, como el vector (1, 0,−1) es no isotrópico definimos ~v2 : (1, 0,−1). Calculemos entonces〈~v1, ~v2〉⊥. Si ~u = (x, y, z) ∈ 〈~v1, ~v2〉⊥ tenemos que f(~v1, ~u) = 0 y f(~v2, ~u) = 0. Calculamos entonces
f(~v2, ~u) =(1 0 −1
)0 0 10 0 01 0 1
xyz
= 0⇒(−1 0 0
)xyz
= 0⇒ x = 0
Entonces obtenemos las ecuaciones{x+ z = 0x = 0
⇒ x = z = 0⇒
x = 0y = αz = 0
Por lo que 〈~v1, ~v2〉⊥ = 〈(0, 1, 0)〉. Entonces definimos ~v3 := (0, 1, 0) aun siendo este último vectorisotrópico. La base B = {~v1, ~v2, ~v3} de R3 es la base ortogonal buscada. Se tiene además que
MB(f) =
1 0 00 −1 00 0 0
La matriz de cambio de base es
P =
0 1 00 0 11 −1 0
10. Se consideran enR3 y con respecto a la base canónica, las formas cuadráticas qa(x, y, z) == x2 + ay2 + 3z2 + 2xy + 2xz + 2ayz.
1. Diagonaliza y estudia el carácter de qa para los distintos valores de a.
2. Para a = 2, calcula el subespacio ortogonal del subespacio V = x− y = 0 respecto dela forma polar.
3. Para a = 1, calcule el rango y el núcleo de la forma polar.
4. Diagonalice la forma polar para a = 3, encontrando una base ortogonal.
1. Diagonalizamos completando cuadrados:
qa(x, y, z) = x2 + 2xy + ay2 + 2xz + 2ayz + 3z2 = (x+ y + z)2 + 2z2 + ay2 − y2 + 2ayz−− 2yz = (x+ y + z)2 + 2z2 + y2(a− 1) + 2yz(a− 1) = (x+ y + z)2 + (a− 1)(y + z)2−− (a− 1)z2 + 2z2 = (x+ y + z)2 + (a− 1)(y + z)2 + (3− a)z2

168 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
siendo una posible diagonalización de la forma cuadrática1 0 00 a− 1 00 0 3− a
Se puede diagonalizar también usando operaciones elementales sobre la matriz de qa. Haremos estoañadiendo la matriz identidad ya que en el apartado 4 nos piden que encontremos una base ortogonal:1 1 1 1 0 0
1 a a 0 1 01 a 3 0 0 1
F2−F1−→
1 1 1 1 0 00 a− 1 a− 1 −1 1 01 a 3 0 0 1
C2−C1−→
1 0 1 1 0 00 a− 1 a− 1 −1 1 01 a− 1 3 0 0 1
F3−F1−→
1 0 1 1 0 00 a− 1 a− 1 −1 1 00 a− 1 2 −1 0 1
C3−C1−→
1 0 0 1 0 00 a− 1 a− 1 −1 1 00 a− 1 2 −1 0 1
F3−F2−→
1 0 0 1 0 00 a− 1 a− 1 −1 1 00 0 2 0 −1 1
C3−C2−→
1 0 0 1 0 00 a− 1 0 −1 1 00 0 2 0 −1 1
• Si a 6= 1 y a 6= 3 la forma cuadrática es no degenerada.
• Si a ∈ (−∞, 1), es indefinida, porque a− 1 < 0 y 3− a > 0.
• Si a ∈ (1, 3), es definida positiva porque a− 1 > 0 y 3− a > 0.
• Si a ∈ (3,∞), es indefinida porque a− 1 > 0 y 3− a < 0.
• Si a = 1, entonces es degenerada y semidefinida positiva, porque 3− a > 0.
• Si a = 3, entonces es degenerada y semidefinida positiva, porque a− 1 > 0.
2. Si a = 2, una base del espacio vectorial V = x− y = 0 es:x = αy = αz = β
⇒ V = 〈(1, 1, 0), (0, 0, 1)〉
La matriz asociada a la forma cuadrática (y a la forma polar asociada fa) será:1 1 11 2 21 2 3
Los vectores (x, y, z) del subespacio ortogonal a V deben cumplir:
(1 1 0
)1 1 11 2 21 2 3
xyz
= 0⇒(2 3 3
)xyz
= 0⇒ 2x+ 3y + 3z = 0

3.8. EJERCICIOS TEMA 3 169
y (0 0 1
)1 1 11 2 21 2 3
xyz
= 0⇒(1 2 3
)xyz
= 0⇒ x+ 2y + 3z = 0
Habrá que resolver, por tanto, el sistema,
{2x+ 3y + 3z = 0x+ 2y + 3z = 0
⇒{x+ y = 0x+ 2y + 3z = 0
⇒{x = −yy + 3z = 0
⇒
x = −αy = αz = −1
3α
Entonces haciendo α = −3 tenemos que V ⊥ = 〈(3,−3, 1)〉.3. Para a = 1 la matriz diagonal asociada a la forma polar es1 0 0
0 0 00 0 2
por lo que el rango de la forma polar es 2. También podemos ver cual es la forma polar para a = 1 ycalcular el rango a partir de ella: 1 1 1
1 1 11 1 3
Igualmente vemos que el rango es 2. Calculemos el núcleo de la forma polar:1 1 1
1 1 11 1 3
xyz
=
000
⇒ {x+ y + z = 0x+ y + 3z = 0
⇒{x+ y + z = 02z = 0
⇒{x+ y = 0z = 0
⇒
⇒
x = αy = −αz = 0
luego Ker(f1) = 〈(1,−1, 0)〉.4. Sustituyendo a = 3 en la diagonalización de la forma polar tenemos1 0 0
0 2 00 0 0
Siendo por tanto la base ortogonal B = {(1, 0, 0), (−1, 1, 0), (0,−1, 1)}.
11. Sea R2[t] el espacio vectorial real de los polinomios de grado menor o igual que 2. Conside-remos la base B = {1, t, t2}. Definimos la forma cuadrática q : R2[t]→ R dada por q(p(t)) :=:= p(α)p(β) donde α y β son números reales fijos.
1. Determine la matriz asociada a q en la base B.
2. Si β = −α, diagonalice q (encontrado una nueva base) y clasifíquela.

170 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
1. La matriz de q en la base B coincide con la matriz de la forma polar asociada a q, que viene dadapor la ecuación:
f(p(t), r(t)) =1
2(q(pt(t) + r(t)))− q(p(t))− q(r(t))), ∀p(t), r(t) ∈ R2[t]
Los elementos de la matriz (aij) de f en la base B serán:
a11 = f(1, 1) =1
2(q(1 + 1)− q(1)− q(1)) =
1
2(2 · 2− 1 · 1− 1 · 1) =
1
2(4− 2) = 1
a12 = f(1, t) =1
2(q(1 + t)− q(1)− q(t)) =
1
2((1 + α)(1 + β)− 1 · 1− αβ) =
1
2(1 + α + β+
+ αβ − 1− αβ) =1
2(α + β)
a13 = f(1, t2) =1
2(q(1 + t2)− q(1)− q(t2)) =
1
2((1 + α2)(1 + β2)− 1 · 1− α2β2) =
1
2((1 + α2)
(1 + β2)− 1 · 1− α2β2) =1
2(1 + α2 + β2 + α2β2 − 1− α2β2) =
1
2(α2 + β2)
a21 = a12
a(22) = f(t, t) =1
2(q(t+ t)− q(t)− q(t)) =
1
2((α + α)(β + β)− αβ − αβ) =
1
2(2α2β − αβ−
− αβ) =1
2(4αβ − 2αβ) = αβ
a23 = f(t, t2) =1
2(q(t+ t2)− q(t)− q(t2)) =
1
2((α + α2)(β + β2)− αβ − α2β2) =
1
2(αβ+
+ αβ2 + α2β + α2β2 − αβ − α2β2) =1
2(αβ2 + α2β)
a31 = a13
a32 = a23
a33 = f(t2, t2) =1
2(q(t2 + t2)− q(t2)− q(t2)) =
1
2((α2 + α2)(β2 + β2)− α2β2 − α2β2) =
=1
2(4α2β2 − α2β2 − α2β2) = α2β2
La matriz queda de la forma:
1 12(α + β) 1
2(α2 + β2)
12(α + β) αβ 1
2(αβ2 + α2β)
12(α2 + β2) 1
2(αβ2 + α2β) α2β2
2. Si β = −α, entonces la matriz de f es de la forma
1 0 α2
0 −α2 0α2 0 α4

3.8. EJERCICIOS TEMA 3 171
Diagonalizamos q usando operaciones elementales: 1 0 α2 1 0 00 −α2 0 0 1 0α2 0 α4 0 0 1
F3−α2F1−→
1 0 α2 1 0 00 −α2 0 0 1 00 0 0 −α2 0 1
C3−α2C1−→
1 0 0 1 0 00 −α2 0 0 1 00 0 0 −α2 0 1
La nueva base es B = {1, t,−α2 + t2}. La forma es indefinida si α 6= 0 y semidefinida positiva siα = 0.
12. Diagonalice ortogonalmente el endomorfismo autoadjunto en el espacio vectorial euclídeoR3 cuya matriz en la base canónica es
M =
3 −1 0−1 3 00 0 2
Está resuelto en el ejemplo 22.
13. Consideremos el espacio vectorial R2[t] formado por los polinomios reales en la indeter-minada t de grado menor o igual que 2 con las operaciones habituales. Definamos el productoescalar
< p, q >:=
∫ 1
0
p(t)q(t) p, q ∈ R2[t]
Aplique el proceso de ortonormalización de Gram-Schmidt a la base {1, t, t2}.En el ejemplo 33 de la página 138 calculamos primero una base ortogonal y después la normalizamos,pero también se puede hacer normalizando los vectores conforme se van hallando como haremosahora. ~e1 = 1, ~e2 = t y ~e3 = t2
~w1 := ~e1 = 1⇒ ~u1 :=1
‖1‖=
1√< 1, 1 >
Calculamos
< 1, 1 >=
∫ 1
0
1 dt = [t]10 = 1
y entonces ~u1 = 1.
~w2 := ~e2 −< ~e2, ~u1 >
< ~u1, ~u1 >~u1 = t− < t, 1 >
< 1, 1 >1
Calculamos
< t, 1 >=
∫ 1
0
t dt =
[t
2
]10
=1
2
y entonces
~w2 = t− 1
2⇒ ~u2 :=
t− 12
‖t− 12‖
=t− 1
2√< t− 1
2, t− 1
2>

172 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
Calculamos
< t− 1
2, t− 1
2>=
∫ 1
0
(t− 1
2
)2
dt =
∫ 1
0
(t2 − t+
1
4
)dt =
[t3
3− t2
2+t
4
]10
=4
12− 6
12+
+3
12=
1
12
Por tanto
~u2 =√
22 · 3(t− 1
2
)=√
3(2t− 1)
Por último
~w3 := ~e3 −< ~e3, ~u1 >
< ~u1, ~u1 >~u1 −
< ~e3, ~u2 >
< ~u2, ~u2 >~u2 = t2 − < t2, 1 >
< 1, 1 >1− < t2,
√3(2t− 1) >
<√
3(2t− 1),√
3(2t− 1) >√3(2t− 1)
Calculamos
< t2, 1 >=
∫ 1
0
t2 dt =
[t3
3
]10
=1
3
< t2,√
3(2t− 1) >=√
3
∫ 1
0
(2t3 − t2) dt =√
3
[t4
2− t3
3
]10
=√
3
(3
6− 2
6
)=
√3
6
<√
3(2t− 1),√
3(2t− 1) >= 3
∫ 1
0
(2t− 1)2 dt = 3
∫ 1
0
(4t2 − 4t+ 1) dt = 3
[4
3t3 − 2t2 + t
]10
=
= 4− 6 + 3 = 1
Por tanto
~w3 = t2 − 1
3−√
3
6
√3(2t− 1) = t2 − 1
3− 1
2(2t− 1) = t2 − t− 2
6+
3
6= t2 − t+
1
6
y entonces
~u3 :=t2 − t+ 1
6
‖t2 − t+ 16‖
=t2 − t+ 1
6√< t2 − t+ 1
6, t2 − t+ 1
6>
Calculamos
< t2 − t+1
6, t2 − t+
1
6>=
∫ 1
0
(t2 − t+
1
6
)2
dt =
∫ 1
0
(t4 − t3 +
1
6t2 − t3 + t2 − t
6+t2
6−
− t6
+1
36
)dt =
∫ 1
0
(t4 − 2t3 +
4
3t2 − t
3+
1
36
)dt =
[t5
5− t4
2+
4
9t3 − t2
6+
t
36
]10
=36
180−
− 90
180+
80
180− 30
180+
5
180=
1
180
Por tanto
~u3 =√
180
(t2 − t+
1
6
)=√
62 · 5(t2 − t+
1
6
)=√
5(6t2 − 6t+ 1)
Obteniendo entonces una base ortonormal {~u1, ~u2, ~u3} de R2[t].

3.8. EJERCICIOS TEMA 3 173
14. Sea f : R3 × R3 → R definida por:
f(~u, ~v) = (x1 − 2x2)(y1 − 2y2) + x2y2 + (x2 + x3)(y2 + y3)
siendo (x1, x2, x3) e (y1, y2, y3) las coordenadas de ~u e ~v en la base canónica.
1. Pruebe que es un producto escalar.
2. Aplique Gram-Schmidt, con este producto escalar, a la base canónica.
Esta resuelto en el ejemplo 33 de la página 138.
15. Considere la matrizA =
2 1 11 2 11 1 2
.
1. Si A representa un endomorfismo, ¿sus autovalores son reales? Calcúlelos. Determine ellímite deAk cuando k→∞.
2. Determine números positivos r, s y t tales que las matricesA− rI3,A− sI3 yA− tI3,representando a formas cuadráticas reales, sean, respectivamente, definida positiva, inde-finida y definida negativa.
1. Según el teorema 11 de la página 128 todos los autovalores son reales por ser la matriz simétrica.Calculamos los autovalores por operaciones elementales:2 1 1 1 0 0
1 2 1 0 1 01 1 2 0 0 1
F2−F3−→
2 1 1 1 0 00 1 −1 0 1 −11 1 2 0 0 1
C2−C3−→
2 0 1 1 0 00 2 −1 0 1 −11 −1 2 0 0 1
F3− 12F1−→
2 0 1 1 0 00 2 −1 0 1 −10 −1 3/2 −1/2 0 1
C3− 12C1−→
2 0 0 1 0 00 2 −1 0 1 −10 −1 3/2 −1/2 0 1
F3+12F2−→
2 0 0 1 0 00 2 −1 0 1 −10 0 1 −1/2 1/2 1/2
C3+12C2−→
2 0 0 1 0 00 2 0 0 1 −10 0 1 −1/2 1/2 1/2
Por tanto los autovalores son 2 doble y 1 simple. Calculamos ahora Ak:
Ak = PDkP t =
1 0 −1/20 1 1/20 −1 1/2
2k 0 00 2k 00 0 1
1 0 00 1 −1−1/2 1/2 1/2
=
2k 0 00 2k 00 0 1/2
1 0 0
0 1 −1−1/2 1/2 1/2
=
2k 0 00 2k 00 0 1/4
Cuando k →∞:
A =
∞ 0 00 ∞ 00 0 1/4
2. Ni idea.

174 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
16. Clasifica el movimiento de ecuaciones: 1y1y2
=
1 0 0
0√
32−1
2
1 12
√3
2
1x1
x2
en el sistema de referencia canónico de R2, mediante el análisis del polinomio característico yespacios propios asociados, determinando los elementos geométricos correspondientes.Resuelto en el ejemplo 5 de la página 149.
17. Realice un estudio completo de la afinidad de ecuaciones 1x′
y′
=
1 0 02 0 −10 −1 0
1xy
en el sistema de referencia canónico de R2, probando para ello en primer lugar que se trata deun movimiento.Esta resuelto en el ejemplo 6 de la página 150.
18. Con respecto al sistema de referencia usual {o, e1, e2} en R2 se considera M 1, un giro de45◦ grados que transforma el (0, 0) en el (1, 1−
√2) yM2, una simetría respecto del eje afín
(0, 0) + 〈(1, 1)〉 seguida de una traslación de vector (0, 1).
1. Determine las matrices asociadas a ambos movimientos con respecto al sistema de refe-rencia usual.
2. Calcule el centro del giroM1.
3. Si se componen ambos movimientos, actuando M1 en primer lugar, ¿se obtiene un movi-miento? En caso afirmativo, clasifíquelo y estudie sus elementos geométricos.
Los puntos 1 y 2 están resueltos para M1 en el ejemplo 4 de la página 147. Resolvemos el punto 1para el segundo movimiento.1. Seguimos los pasos del ejemplo 8 de la página 152. Tomamos un vector director de la recta denorma 1
~u :=
(1√2,
1√2
)y completamos a una base ortonormal de R2 conservando la orientación canónica
~v :=
(− 1√
2,
1√2
)
En esta base así construida, B = {~u,~v}, la matriz de la simetría es(
1 00 −1
)con lo que si llamamos
P a la matriz de paso
P =
(1√2− 1√
21√2
1√2
)

3.8. EJERCICIOS TEMA 3 175
podemos obtener la matriz en la base canónica haciendo
P
(1 00 −1
)P−1 =
(1√2− 1√
21√2
1√2
)(1 00 −1
)( 1√2
1√2
− 1√2
1√2
)=
(1√2
1√2
1√2− 1√
2
)(1√2
1√2
− 1√2
1√2
)=
=
(0 11 0
)Como además tenemos la traslación y el (0, 0) es un punto de la recta afín de la simetría, tenemos quela matriz de este segundo movimiento es
M2 =
1 0 00 0 11 1 0
3. La composición de movimientos es siempre un movimiento, por tanto la respuesta a la preguntaes afirmativa. Es fácil comprobar que la composición de transformaciones afines se corresponde conla multiplicación de sus matrices respecto de sistemas de referencia fijados. Entonces, si M1 actúaprimero la matriz del movimiento composición queda1 0 0
0 0 11 1 0
1 0 0
1 1√2− 1√
2
1−√
2 1√2
1√2
=
1 0 0
1−√
2 1√2
1√2
2 1√2− 1√
2
Calculamos el polinomio característico asociado a la transformación ortogonal correspondiente, conmatriz asociada
M =
(1√2
1√2
1√2− 1√
2
)
p(λ) = |M − λI3| =
∣∣∣∣∣ 1√2− λ 1√
21√2
− 1√2− λ
∣∣∣∣∣ =
(1√2− λ)(− 1√
2− λ)− 1
2= −1
2+ λ2 − 1
2=
= λ2 − 1
Las raíces son ±1 por tanto se trata de una simetría. El eje vectorial es
P1 = Ker(M − I2) =
{(xy
)∈ R2 : (M − I2)
(xy
)=
(00
)}=
=
{(xy
)∈ R2 :
(1√2− 1 1√
21√2
− 1√2−1
)(xy
)=
(00
)};(
1√2− 1 1√
21√2
− 1√2−1
)F1=√2F2−→
F2=√2F1
(1 −
√2− 1
−√
2 + 1 1
)F2−(−
√2+1)F1
−→(1 −
√2− 1
0 1−(−√
2− 1) (−√
2 + 1)) =
(1 −
√2− 1
0 1− (2− 1)
)=
(1 −
√2− 1
0 0
)P1 =
{(xy
)∈ R2 : x−
(1 +√
2)y = 0
}=⟨(
1 +√
2, 1)⟩

176 TEMA 3. ESPACIO AFÍN Y EUCLÍDEO. MOVIMIENTOS
El eje afín de simetría es entonces de la forma
x−(
1 +√
2)y = k
para cierto k ∈ R. Si tomamos un punto cualquiera de esta recta, de la forma por tanto(k +
(1 +√
2)y, y),
su imagen 1 0 0
1−√
2 1√2
1√2
2 1√2− 1√
2
1
k +(1 +√
2)y
y
=
1
1−√
2 + k√2
+ y√2
+ y
2 + k√2
+ y√2
+ y − y√2
=
=
1
1−√
2 + k√2
+ y√2
+ y
2 + k√2
+ y
debe verificar 1
k +(1 +√
2)y
y
=
1
1−√
2 + k√2
+ y√2
+ y
2 + k√2
+ y