
Agente de Riesgo Ergonomico
47
25/01/2015 1 ING. MARCO ANTONIO GUTIÉRREZ ESCAMILLA AL TERMINO DE LA PRESENTACIÓN LOS PARTICIPANTES IDENTIFICARAN Y UTILIZARÁN LOS DIFERENTES MÉTODOS PARA EVALUAR EL AGENTE DE RIESGO ERGONÓMICO ENFOCADO A LEVANTAMIENTO DE CARGAS, POSTURAS FORZADAS Y MOVIMIENTOS REPETITIVOS. OBJETIVO
-
Upload
marco-antonio-gutierrez-escamilla -
Category
Documents
-
view
10 -
download
0
description
agentes ergonomicos
Transcript of Agente de Riesgo Ergonomico

25/01/2015
1
ING. MARCO ANTONIO GUTIÉRREZ ESCAMILLA
AL TERMINO DE LA PRESENTACIÓN LOS PARTICIPANTES
IDENTIFICARAN Y UTILIZARÁN LOS DIFERENTES MÉTODOS PARA
EVALUAR EL AGENTE DE RIESGO ERGONÓMICO ENFOCADO A
LEVANTAMIENTO DE CARGAS, POSTURAS FORZADAS Y
MOVIMIENTOS REPETITIVOS.
OBJETIVO

25/01/2015
2

25/01/2015
3
Extremidades Superiores
• Tendinitis del manguito de los rotadores• Epicondilitis• Epitrocleitis• Síndrome del túnel carpiano• Ganglión
• Síndrome cervical por tensión.• Lumbalgia.
Espalda
Extremidades Inferiores
• Bursitis prepatelar
La inflamación de los tendones de los músculos del hombro, especialmente delmanguito de rotador, puede presentarse debido al uso repetitivo de los movimientos derotación. Esta inflamación ocurre porque la zona por donde trascurren los tendones, esuna zona muy estrecha rodeada por huesos, lo que promueve el rozamiento de lostendones con el acromion.Este rozamiento y en algunos casos la compresión, produce la inflamación del tendón.

25/01/2015
4
La Epicondilitis corresponde a la manifestación clínica de una lesión por sobreuso de los tendones de los músculos que se originan en el Epicóndilo.Al continuar expuestos a la tensión por continuos movimientos de pronación-supinaciónforzada, provocan que las fibras de Sharpey (fibras que permiten el anclaje de lostendones en los puntos de inserción ósea), generen dolor e inflamación en una primeraetapa y se desgarren o provoquen alteraciones tróficas en la unión osteotendinosa(unión del tendón con el hueso) en una segunda etapa.
El síndrome del Túnel Carpiano corresponde a la compresión del nervio mediano a supaso por la muñeca a nivel del interior del túnel del carpo, es un cuadro clínicoprovocado por una combinación de factores que incluyen el uso repetitivo de losmúsculos flexores superficial y profundo de los dedos, la inflamación de las vainassinoviales de estos músculos, los movimientos y posturas forzadas de mano en flexión yextensión o microtraumatismos (golpes) en la zona palmar de la muñeca.

25/01/2015
5
La lumbalgia es una contractura dolorosa y persistente de los músculos que seencuentran en la parte baja de la espalda, específicamente en la zona lumbar.Suele manifestarse en personas que están sometidas a sobrecargas continuadas de lamusculatura lumbar. También existen personas que en su actividad laboral permanecenlargos periodos de tiempo sentados en mala posición o bien mantienen posturasforzadas prolongadamente.
Literalmente significa el estudio del trabajo.
Esta ciencia tiene el objetivo de adaptar los equipos, tareas y
herramientas a las necesidades y capacidades de los seres humanos,
mejorando su eficiencia, seguridad y bienestar.

25/01/2015
6
La Ergonomía en los factores humanos, es la disciplina científicarelacionada con el conocimiento de la interacción entre el serhumano y otros elementos de un sistema, y la profesión que aplicala teoría, principios, datos y métodos para diseñar buscandooptimizar el bienestar humano y la ejecución del Sistema Global.

25/01/2015
7
Persona
MaquinaEntorno
Organización
•Reducir lesiones y enfermedades.
•Disminuir costos por incapacidades e indemnizaciones.
•Aumentar la productividad, calidad, seguridad.
•Mejorar las condiciones y la calidad de vida en el trabajo.
El objetivo que se persigue es asegurar que los trabajadores no sufran lesiones, trabajen sin peligro y con comodidad y sean productivos.

25/01/2015
8
A modo de resumen, la ergonomía trata de alcanzar el mayor equilibrio posible entre las necesidades/posibilidades del usuario y las prestaciones/requerimientos de los productos y servicios:
ERGONOMÍA
FÍSICA
COGNITIVA
ORGANIZACIONAL

25/01/2015
9
Se ocupa de la optimización de los sistemas socio-técnicos,
incluyendo las estructuras organizativas, los procesos y las
políticas.
�Comunicación�Gestión de recursos humanos�Diseño de tareas�Horarios de trabajo�Trabajo en equipo�Diseño participativo�Ergonomía comunitaria�Trabajo cooperativo�Nuevos paradigmas de trabajo�Organizaciones virtuales�Teletrabajo�Gestión de la calidad.
Se ocupa de estudiar cómo los procesos mentales, tales como,
percepción, memoria, razonamiento, y respuesta motora, se
afectan en la interacción entre las personas y otros
componentes del sistema.
�Carga de trabajo mental�Toma de decisiones�Funcionamiento experto�Interacción persona-ordenador�Fiabilidad humana�Estrés laboral y formación

25/01/2015
10
Estudia cómo se relacionan con la actividad física diversos
aspectos de la anatómica humana, la antropometría, la
fisiológica y la biomecánica.
�Posturas de trabajo.
�Manipulación de materiales.
�Movimientos repetitivos.
�Trastornos musculo-esqueléticos.
�Diseño del puesto.
�Aspectos ligados con la seguridad y la salud en el trabajo.

25/01/2015
11

25/01/2015
12
NIOSHNATIONAL INSTITUTE FOR OCCUPATIONAL SAFETY AND HEALTH
INSTITUTO NACIONAL PARA LA SEGURIDAD Y LA SALUD OCUPACIONAL
El Método fue desarrollado por NIOSH en 1981 para evaluar elmanejo de cargas en el trabajo y en 1991 fue revisado y se incluyeuna completa la descripción del método y las limitaciones de suaplicación 1994.
La ecuación NIOSH para el levantamiento de cargas determina ellímite de peso recomendado (LPR), a partir del cociente de sietefactores
Los criterios para establecer los límites de carga son de carácterbiomecánico, fisiológico y psicofísico

25/01/2015
13
Mínimo 15 minutos de observación
PASO 1• TOMA DE DATOS
PASO 2
• CALCULO DEL PESO LIMITE RECOMENDADO (LPR)
PASO 3
• CALCULO DEL ÍNDICE DE LEVANTAMIENTO (IL)
25/01/2015
14
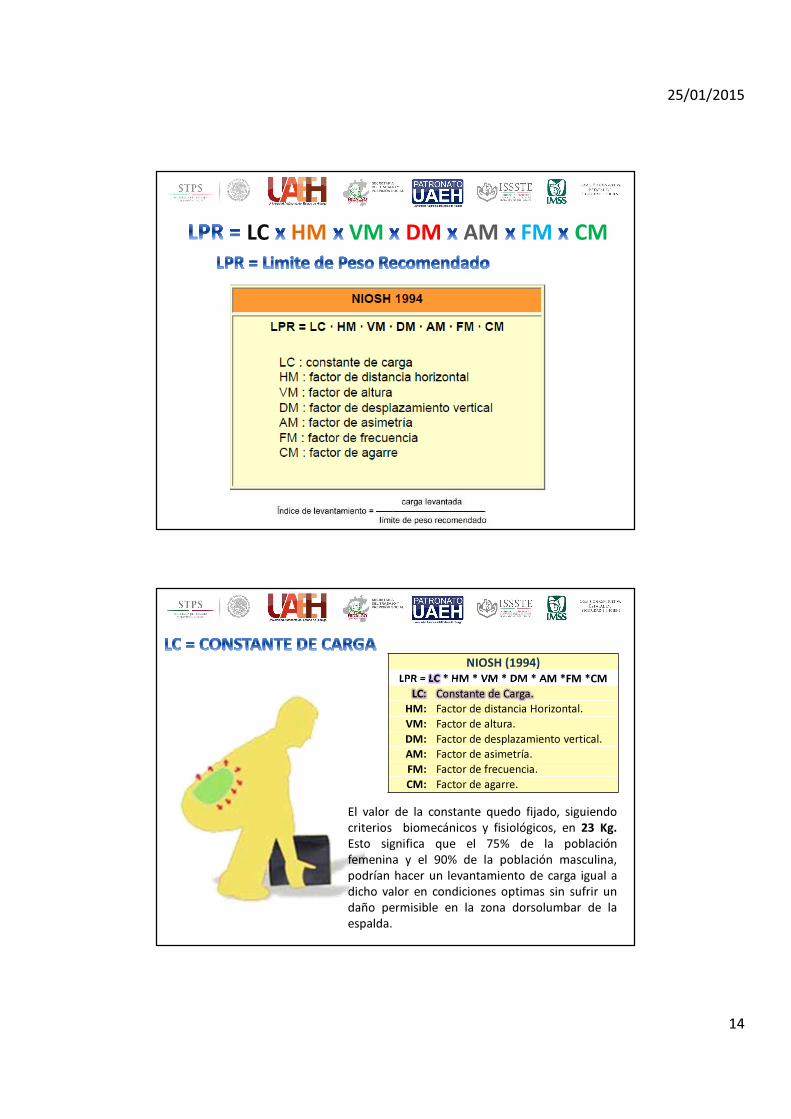
LC HM VM DM AM FM CM
NIOSH (1994)LPR = LC * HM * VM * DM * AM *FM *CM
LC: Constante de Carga.HM: Factor de distancia Horizontal.
VM: Factor de altura.
DM: Factor de desplazamiento vertical.AM: Factor de asimetría.
FM: Factor de frecuencia.
CM: Factor de agarre.
El valor de la constante quedo fijado, siguiendocriterios biomecánicos y fisiológicos, en 23 Kg.Esto significa que el 75% de la poblaciónfemenina y el 90% de la población masculina,podrían hacer un levantamiento de carga igual adicho valor en condiciones optimas sin sufrir undaño permisible en la zona dorsolumbar de laespalda.

25/01/2015
15
NIOSH (1994)LPR = LC * HM * VM * DM * AM *FM *CM
LC: Constante de Carga.
HM: Factor de distancia Horizontal.
VM: Factor de altura.
DM: Factor de desplazamiento vertical.AM: Factor de asimetría.
FM: Factor de frecuencia.
CM: Factor de agarre.
HM = 25/H (cm)H = Distancia Horizontal
Si V ≥ 25 cm. H = 20 + W/2Si V < 25 cm. H = 25 + W/2
W = Anchura de la carga en el plano sagital
V = Altura de las manos respecto al suelo.
Si H ≤ 25 cm. HM = 1Si H > 63 cm. HM = 0
NIOSH (1994)LPR = LC * HM * VM * DM * AM *FM *CM
LC: Constante de Carga.
HM: Factor de distancia Horizontal.
VM: Factor de altura.
DM: Factor de desplazamiento vertical.AM: Factor de asimetría.
FM: Factor de frecuencia.
CM: Factor de agarre.
VM = ( 1 - 0.003 |V-75|)V = Distancia vertical entre el punto de agarre de la
carga y el suelo.
Los valores permitidos están entre 0 y 175 cm.
Si V > 175 cm, V = 0Si V = 75 cm, V = 1
Se puede considerar los valores de H y V, como de origen y destino.

25/01/2015
16
NIOSH (1994)LPR = LC * HM * VM * DM * AM *FM *CM
LC: Constante de Carga.
HM: Factor de distancia Horizontal.
VM: Factor de altura.
DM: Factor de desplazamiento vertical.AM: Factor de asimetría.
FM: Factor de frecuencia.
CM: Factor de agarre.
DM = 0.82 + 4.5 / DD = Diferencia de altura entre las posiciones verticales
de la carga en el origen y en el destino del lev.
D = | V1 – V2 |
Si D < 25 cm, DM = 1Si D > 175 cm, DM = 0
NIOSH (1994)LPR = LC * HM * VM * DM * AM *FM *CM
LC: Constante de Carga.
HM: Factor de distancia Horizontal.
VM: Factor de altura.
DM: Factor de desplazamiento vertical.AM: Factor de asimetría.
FM: Factor de frecuencia.
CM: Factor de agarre.
AM = 1 – (0.0032*A )A = Angulo de asimetría, se mide siempre en el origen del
levantamiento. Si se requiere control significativo en el
destino, entonces también se medirá en el destino del
levantamiento
Si a > 135°; AM = 0

25/01/2015
17
NIOSH (1994)LPR = LC * HM * VM * DM * AM *FM *CM
LC: Constante de Carga.
HM: Factor de distancia Horizontal.
VM: Factor de altura.
DM: Factor de desplazamiento vertical.AM: Factor de asimetría.
FM: Factor de frecuencia.
CM: Factor de agarre.
� Para frecuencias inferiores a 5 min, utilizar F=0.2 elev/min.
� Numero de levantamientos / minuto(Periodos de al menos 15 min.).
� Duración del levantamiento� Posición Vertical de la carga.
NIOSH (1994)LPR = LC * HM * VM * DM * AM *FM *CM
LC: Constante de Carga.
HM: Factor de distancia Horizontal.
VM: Factor de altura.
DM: Factor de desplazamiento vertical.AM: Factor de asimetría.
FM: Factor de frecuencia.
CM: Factor de agarre.

25/01/2015
18

25/01/2015
19
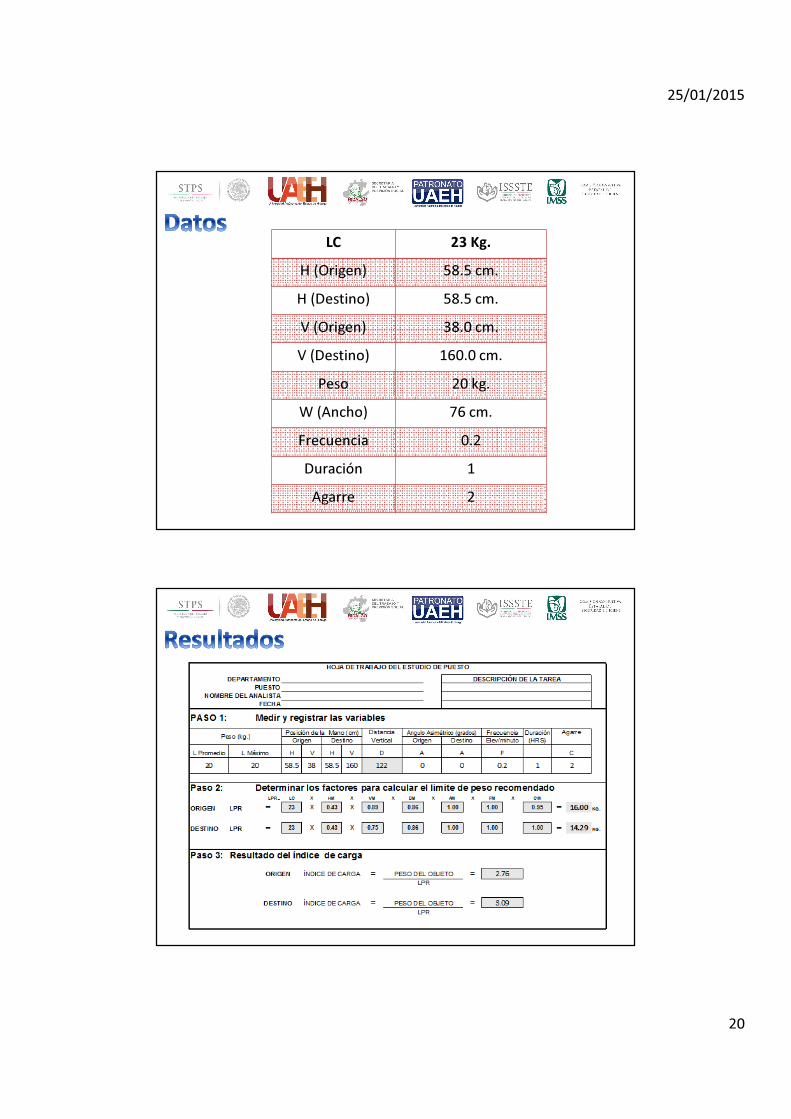
Suponiendo que el operador levanta el carrete como se muestra enel plano, ubicado al lado de la máquina, la altura vertical (V) en elorigen es de 15 pulgadas, la altura vertical (V) en el destino es 63
pulgadas, y la distancia horizontal (H) es de 23 pulgadas en elorigen y el destino de la carga. la actividad se produce sólo una vezpor turno, por lo que se supone que es F<0.2, y la duración sesupone que es menos de 1 hora.
La carga asimétrica no se considera (es decir, A = 0) y de acuerdocon la tabla de factor de agarre, los acoplamientos se clasificancomo bueno porque el objeto es irregular y los dedos se puedenflexionar unos 90 grados. Dado que se requiere un controlsignificativo en el destino, el LPR debe ser calculado, tanto en elorigen como en el destino de la elevación.
25/01/2015
20
LC 23 Kg.
H (Origen) 58.5 cm.
H (Destino) 58.5 cm.
V (Origen) 38.0 cm.
V (Destino) 160.0 cm.
Peso 20 kg.
W (Ancho) 76 cm.
Frecuencia 0.2
Duración 1
Agarre 2

25/01/2015
21
El trabajo se ilustra en la figura anterior, se compone de un trabajador deinspección de contenedores compactos en un estante bajo, para luego levantarlocon ambas manos directamente en frente del cuerpo de la plataforma 1 alestante 2 a una velocidad de 3/min para una duración de 45 minutos. para esteanálisis, asumir que (1) el trabajador no puede dar un paso adelante al colocar elobjeto en el destino, debido a la estantería inferior, y (2) se requiere un controlsignificativo del objeto en el destino. los recipientes son de diseño óptimo, perosin asas.
Los datos de las variables de la tarea se registran en la hoja de análisis de tareas.La distancia horizontal en el origen de la carga es de 10 pulgadas y la distanciahorizontal en el destino de la carga es de 20 pulgadas. La altura de la repisa 1 es22 pulgadas y la altura de la repisa dos es 59 pulgadas. Dado que el contenedores de diseño óptimo, pero no tiene manijas o recortes, el agarre se define comoRegular. La asimetría no está involucrada (A = 0). Se requiere un controlsignificativo de la carga en el destino del ascensor. Por lo tanto, el LPR se calculaen tanto el origen como el destino de la carga.

25/01/2015
22
LC 23 Kg.
H (Origen) 25.4 cm.
H (Destino) 50.8 cm.
V (Origen) 55.9 cm.
V (Destino) 149.9 cm.
Peso 11.8 kg.
W (Ancho) ?
Frecuencia 3
Duración 1
Agarre 2

25/01/2015
23
Si V ≥ 25 cm. H = 20 + W/2Si V < 25 cm. H = 25 + W/2
CAJA = 40.64 cm
Descarga un trabajador cajas de 12 libras a un pallet de una cintatransportadora, como se ilustra. Las cajas de cartón se apilanverticalmente desde el suelo en cinco niveles. no se requiereninguna torsión al recoger y poner abajo las cajas de cartón, y eltrabajador es libre de caminar sobre el pallet para llegar cerca decada caja de cartón (es decir, una sola capa en profundidad desde laparte delantera de la plataforma debe ser analizada). Caminar ycargar se reducen al mínimo, manteniendo los pallets cerca deltransportador, y no se requiere un control significativo del objetoen el destino de la carga. la ubicación vertical (V) en el origen, laubicación horizontal (H), y la distancia de desplazamiento vertical(D), varían en las cargas al ser acomodadas.

25/01/2015
24
Este trabajo se divide en cinco tareas que representan los cinco niveles de cajascargadas. La numeración es arbitraria y la secuenciación no reflejan el orden enque se realiza la tarea. Es importante, sin embargo, identificar cada tipo distintode carga.Las siguientes observaciones se realizaron y se registran en la hoja de trabajo deanálisis.1 -. Dimensiones del cartón son 16 pulgadas x 16 pulgadas x 16 pulgadas2 -. Las ubicaciones verticales en el origen representan la posición de las manosdebajo de las cajas de cartón. la parte superior de la cinta transportadora es de 20pulgadas del suelo.3 -. Para este ejemplo, se supone que no se midieron las ubicaciones horizontales,pero estimaron utilizando las fórmulas proporciona en la sección multiplicadorhorizontal. A partir de estas fórmulas, H = (20 + /2) o 16 pulgadas para los cuatroprimeros niveles y h = (10 +16 / 2) o 18 pulgadas para el nivel inferior.4 -. La plataforma es de 4 pulgadas de altura.5 -. La asimetría no está involucrado (A = 0)6 -. Cajas de cartón se descargan continuamente a la velocidad de 12 por minuto(es decir, 2.4 levantamientos / min por nivel) durante 1 hora.7 -. El agarre se clasifica como regular

25/01/2015
25

25/01/2015
26
Posturas forzadas:
Uno de los sistemas mas sencillos es el metodo OWAS,desarrollado en la OVAKO OY, industria finlandesa dedicada a laproduccion de barras y perfiles de acero (Ovako Working Posture
Analysis System).
El método OWAS se basa en una clasificación simple y sistemáticade las posturas de trabajo, combinado con observaciones sobrelas tareas. Como se verá a lo largo del método, su objetivoconsiste en una evaluación del riesgo de carga postural entérminos de frecuencia x gravedad.

25/01/2015
27
ESPALDA
BRAZOS
PIERNAS

25/01/2015
28

25/01/2015
29

25/01/2015
30

25/01/2015
31

25/01/2015
32

25/01/2015
33

25/01/2015
34

25/01/2015
35
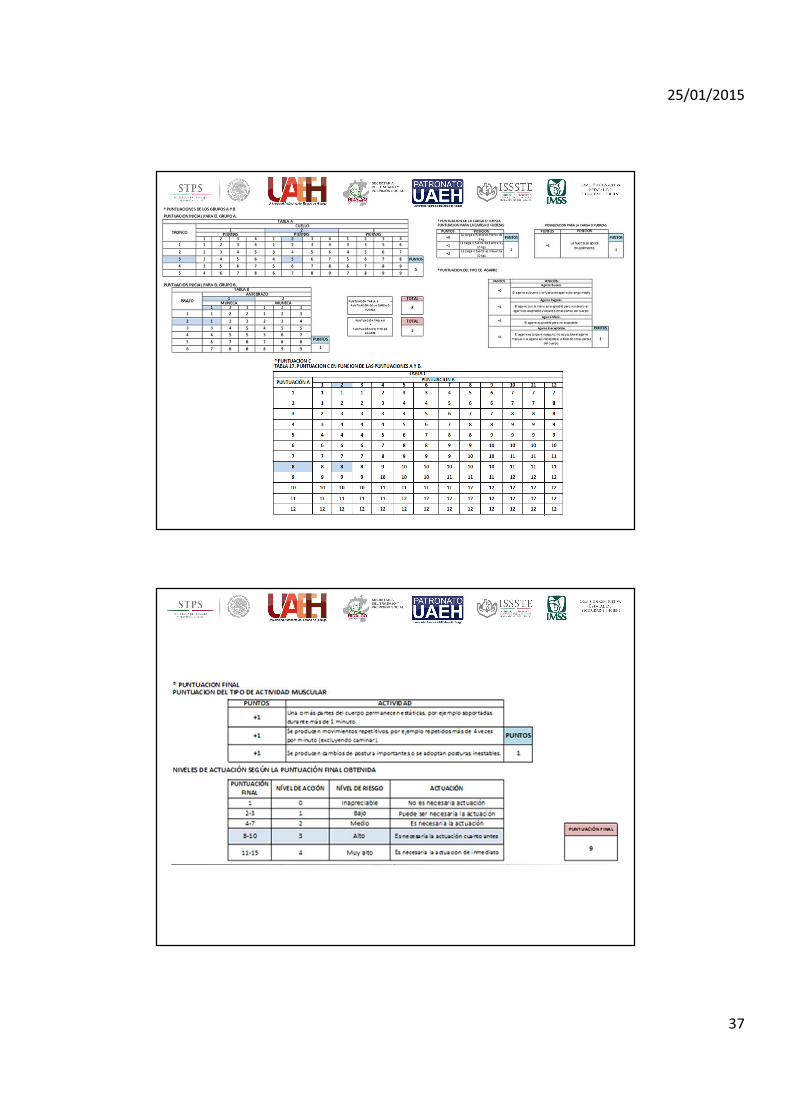
(Rapid Entire Body Assessment)
Evaluación Rápida de Todo el Cuerpo

25/01/2015
36
25/01/2015
37

25/01/2015
38

25/01/2015
39
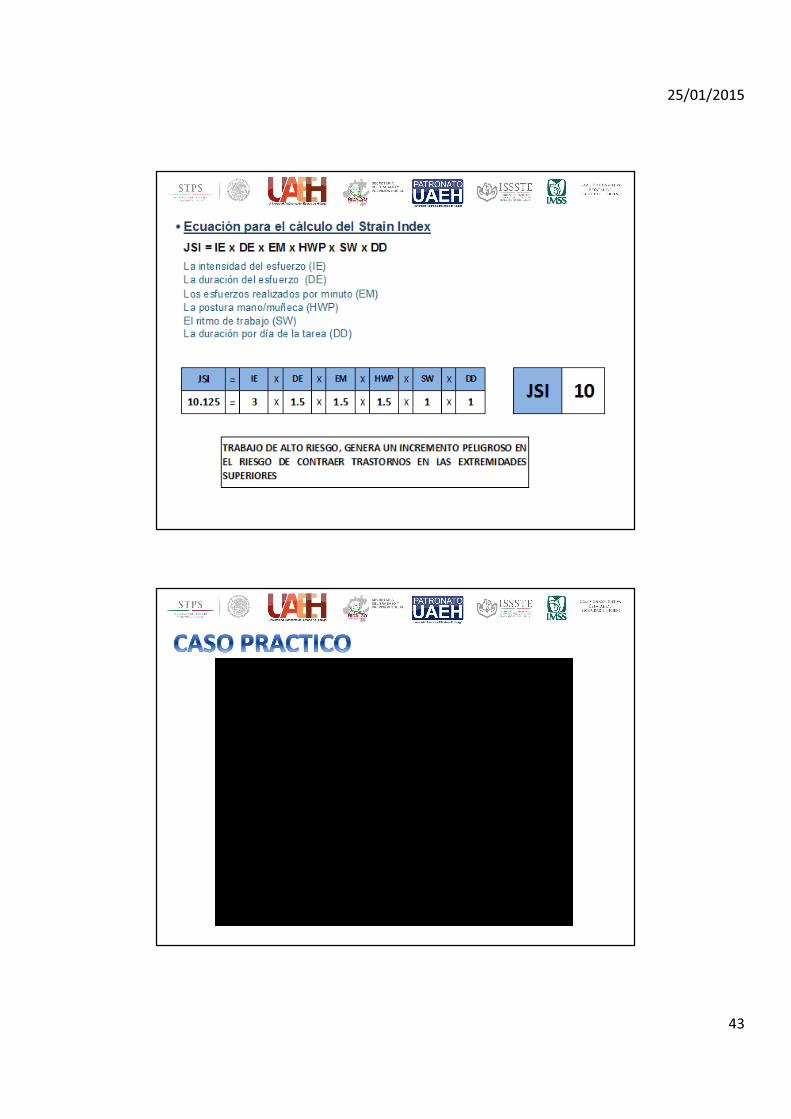
(Job Strain Index)
Índice de Tensión

25/01/2015
40

25/01/2015
41

25/01/2015
42
25/01/2015
43

25/01/2015
44

25/01/2015
45
�LA ERGONOMÍA ES UNA CIENCIA QUE SE APOYA EN LOS CONOCIMIENTOS DE SEGURIDAD E HIGIENE PARA EVALUAR EL PUESTO DE TRABAJO.
�CON UNA BASE SOLIDA, SE PUEDE EVALUAR Y MEJORAR EL PUESTO DE TRABAJO.
�LA ERGONOMÍA TRATA DE BUSCAR UN EQUILIBRIO ENTRE EL TRABAJADOR-MAQUINA- ORGANIZACIÓN- ENTORNO.
�CON LOS MÉTODOS ERGONÓMICOS DE EVALUACIÓN SE PUEDE IR JERARQUIZANDO PRIORIDADES EN LA EVALUACIÓN DE PUESTOS EN LOS CENTROS DE TRABAJO.

25/01/2015
46

25/01/2015
47
ING. MARCO ANTONIO GUTIÉRREZ ESCAMILLACOORDINADOR AUXILIAR DE SEGURIDAD EN EL TRABAJOIMSS DELEGACIÓN ESTATAL EN HIDALGOE-MAIL: [email protected]


















