ReporteIntegradora SCA E2 - Copia
13
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL Proyecto Integradora Diseño de controladores Manual de prácticas de laboratorio Página 1
-
Upload
jonathan-zaldivar-ruiz -
Category
Documents
-
view
17 -
download
1
description
dasd asd asdasd asd
Transcript of ReporteIntegradora SCA E2 - Copia
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
Proyecto Integradora
Diseño de controladores
Manual de prácticas de laboratorio Página 1
Responsable de la Práctica:
Zaldívar Ruiz JonathanArteaga Martínez Santiago
Atanacio Bailón FelipeDe la torre Torres Oscar Abdiel
Méndez Hernández Pedro Eleazar
Solano Barrios Lisandro___________________________
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
1. Objetivo
El sistema bola y viga es un caso de estudio típico en la ingeniería de control, puesto que introduce el tema de sistemas no lineales e inestables. Esto se debe a que en lazo abierto la salida del sistema, es decir, la posición de la bola en la viga aumenta indefinidamente hasta encontrar un final de la viga, cuando el ángulo de la viga permanece constante en cualquier valor distinto de cero, lo que puede asociarse con una señal de entrada al sistema de tipo escalón.
2. Antecedentes.
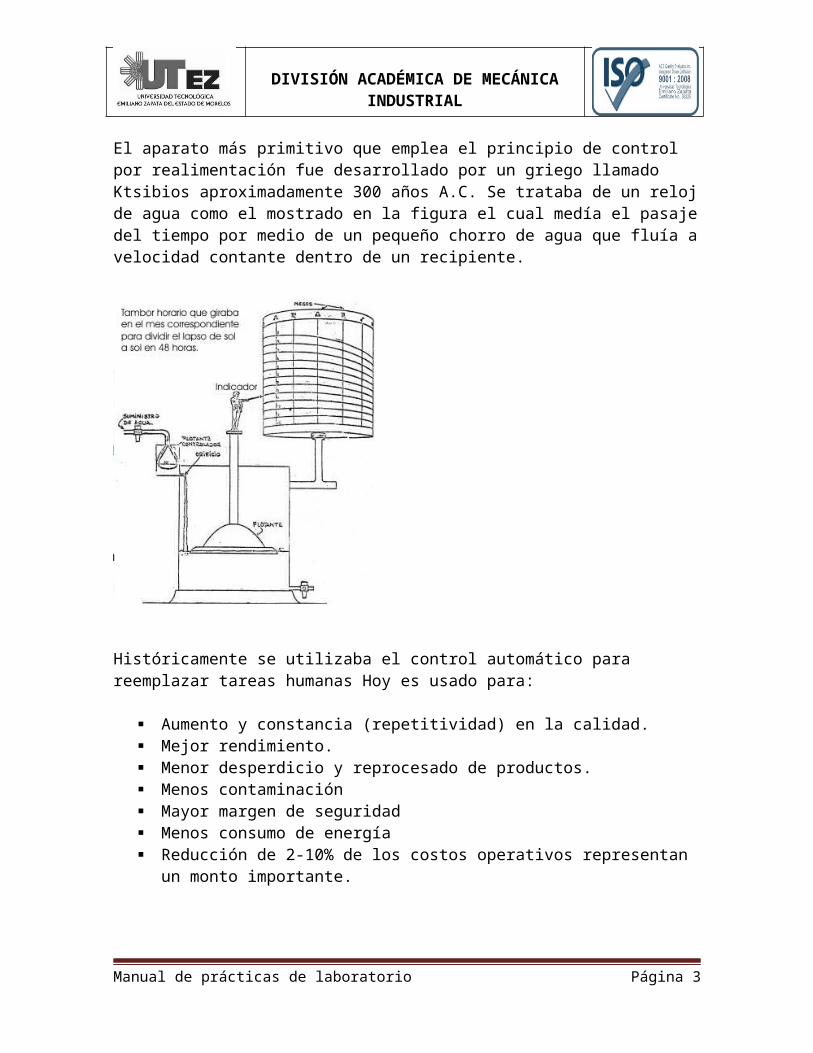
La aplicación del principio de realimentación tiene sus comienzos en máquinas e instrumentos muy sencillos, algunos de los cuales se remontan a 2000 años atrás.El aparato más primitivo que emplea el principio de control por realimentación fue desarrollado por un griego llamado Ktsibios aproximadamente 300 años A.C. Se trataba de un reloj de agua como el mostrado en la figura el cual medía el pasaje del tiempo por medio de un pequeño chorro de agua que fluía a velocidad contante dentro de un recipiente.
Históricamente se utilizaba el control automático para reemplazar tareas humanas Hoy es usado para:
Aumento y constancia (repetitividad) en la calidad.
Manual de prácticas de laboratorio Página 2
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
Mejor rendimiento. Menor desperdicio y reprocesado de productos. Menos contaminación Mayor margen de seguridad Menos consumo de energía Reducción de 2-10% de los costos operativos representan un monto
importante.
2.1. Teoría básica.
Se pueden implementar tres tipos de control automático a un sistema. Pero cada uno tiene sus propias ventajas.
Control Proporcional
Pequeña reducción en el tiempo de elevación.
El máximo pico de sobre impulso se incrementa.
El amortiguamiento se reduce.
El tiempo de asentamiento cambia en pequeña proporción.
El error en estado estable disminuye con incrementos de ganancia.
El tipo de sistema permanece igual.
Control proporcional integral
El amortiguamiento se reduce.
El máximo pico de sobre impulso se incrementa.
Decrece el tiempo de elevación.
El tipo de sistema se incrementa en una unidad.
El error en estado establece mejora por el incremento del tipo de sistema.
Control proporcional derivativo
El amortiguamiento se incrementa.
El máximo pico de sobre impulso se reduce.
Manual de prácticas de laboratorio Página 3
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
El tiempo de elevación experimenta pequeños cambio.
El error en estado estable presenta pequeños cambios.
El tipo de sistema permanece igual.
2.2. Trabajo previo.
4. Definiciones y terminologías.
Sistema. Es una combinación de componentes que actúan conjuntamente para lograr cierto objetivo. El concepto de sistema se puede aplicar a fenómenos físicos, biológicos, económicos, sociales y otros.
Variable controlada (Salida). Es la cantidad o condición que se mide y controla.
Variable manipulada. Es la variable que se modifica con el fin de afectar laVariable controlada.
Proceso. Es el desarrollo natural de un acontecimiento, caracterizado por una serie de eventos o cambio graduales, progresivamente continuos y que tienden a un resultado final.
Manual de prácticas de laboratorio Página 4
METODO ANALITICO
EJECUCIÓN
METODO GRAFICO
JUNTO AL
CONCLUSIONES PERMITIRAN OBTENER
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
Planta. Conjunto de piezas de una maquinaria que tienen por objetivo realizar cierta actividad en conjunto. En sistemas de control, por planta se entiende el sistema que se quiere controlar.
Perturbaciones. Una perturbación es algún suceso que afecta adversamente el desarrollo de algún proceso. Si la perturbación se genera dentro del sistema, se le denomina perturbación interna, caso contrario la perturbación es externa.
Sistema de control de lazo abierto. Es un sistema de control en donde la salida no tiene efecto sobre la acción de control. La salida puede ser o no ser medida, pero esa medición no afecta al controlador.
Control realimentado. Es una operación que tiende a mantener una relación prescrita de una variable de un sistema con otra, comparando estas funciones y usando sus diferencias como medio de control.
Sistema de control realimentado. Es aquel sistema de control que utiliza alguna relación entre la variable de salida y alguna variable de referencia, como medio de control.
6. Equipos y materiales.
6.1 Equipo a utilizar:
Laptop o pc de escritorio con software Arduino Arduino Sensor Ultrasónico Cable utp
Manual de prácticas de laboratorio Página 5
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
7. Desarrollo de la práctica.
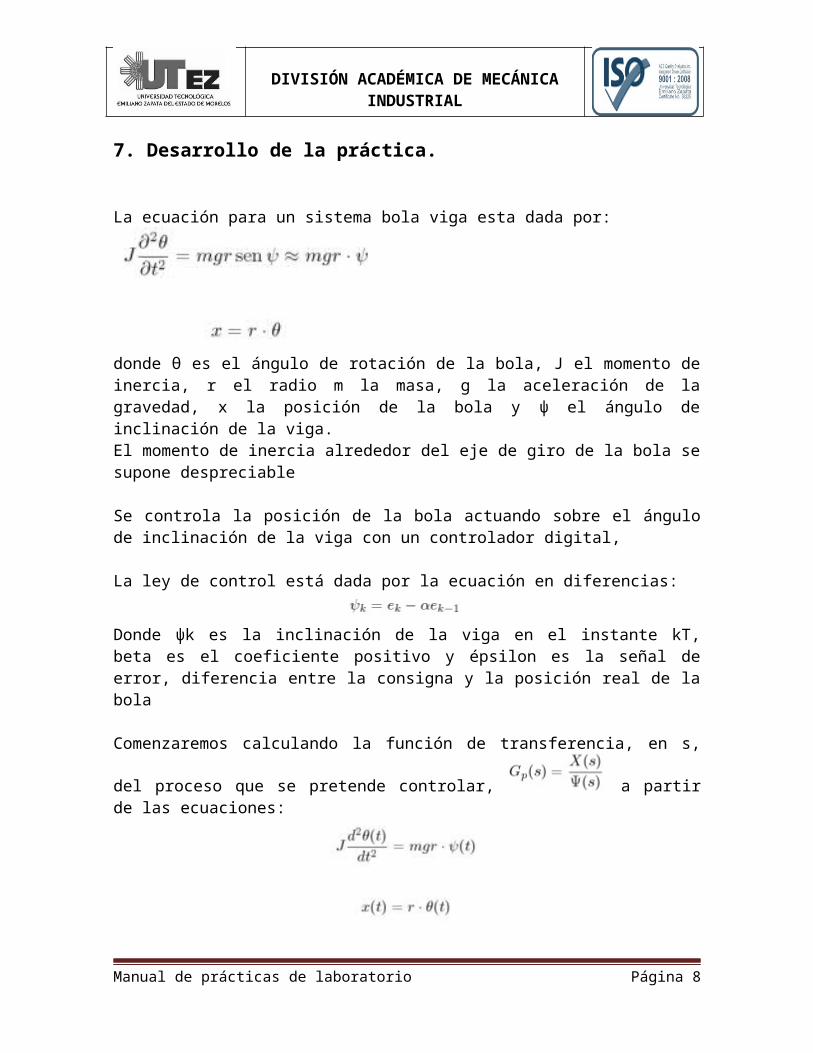
La ecuación para un sistema bola viga esta dada por:
donde θ es el ángulo de rotación de la bola, J el momento de inercia, r el radio m la masa, g la aceleración de la gravedad, x la posición de la bola y ψ el ángulo de inclinación de la viga.El momento de inercia alrededor del eje de giro de la bola se supone despreciable
Se controla la posición de la bola actuando sobre el ángulo de inclinación de la viga con un controlador digital,
La ley de control está dada por la ecuación en diferencias:
Donde ψk es la inclinación de la viga en el instante kT, beta es el coeficiente positivo y épsilon es la señal de error, diferencia entre la consigna y la posición real de la bola
Comenzaremos calculando la función de transferencia, en s, del proceso que se
pretende controlar, a partir de las ecuaciones:
Aplicando la transformada de Laplace a las ecuaciones anteriores resulta:
Y de ellas se obtiene
:
Manual de prácticas de laboratorio Página 6
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
Para el desarrollo de la práctica comenzaremos conectando las terminales del sensor y del servomotor al arduino, y cargaremos el código:
#include <Servo.h>
Servo s; // create servo object to control a servounsigned long pulso; // necesitamos una variable para medir el pulsofloat d; // otra para calcular la distanciaconst int trigger = 10;const int echo = 13;int b1 = 1, b2 = 2, b3 = 3, b4 = 4;int x = 1, ps = 15;int pi=15;void setup() { Serial.begin(9600); pinMode(trigger, OUTPUT); pinMode(echo, INPUT); for (x = 1; x <= 4; x++) { pinMode(x, INPUT); } pinMode(echo, INPUT); s.attach(9);}
void loop() { s.write(pi); int z, p; for (x = 1; x <= 4; x++) { z = digitalRead(x); if (z == HIGH) { p = x; } } digitalWrite(trigger, LOW); delayMicroseconds(5); digitalWrite(trigger, HIGH); delayMicroseconds(10); digitalWrite(trigger, LOW); d = pulseIn(echo, HIGH); // Serial.println(d); d = d / 331.5; d = d / 2; while (d >= 3 || d <= .10) { digitalWrite(trigger, LOW);
Manual de prácticas de laboratorio Página 7
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
delayMicroseconds(5); digitalWrite(trigger, HIGH); delayMicroseconds(10); digitalWrite(trigger, LOW); d = pulseIn(echo, HIGH); s.write(pi); d = d / 331.5; d = d / 2; Serial.println("Error Fuera de rango"); } int pos = d; // Serial.println(d); Serial.println("hola"); Serial.println(d); Serial.println("adios"); switch (p) { case 1: if (d > .60) { // para el uno ps += 1; s.write(ps);
} if (d <= .60) { ps = 20; s.write(pi); }
break; case 2: if (d > 2) { //para el 2 d = 0 ; s.write(pi);
} if (d < .70) { ps -= 1; s.write(ps); Serial.println(ps); } else if (d >= .9) { ps += 1; s.write(ps); Serial.println(ps); } if (d <= 1.1 && d >= .75) {
Manual de prácticas de laboratorio Página 8
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
ps = 20; s.write(pi); }
break; case 3: if (d > 2) { //para el 3 d = 0 ; s.write(pi);
} if (d < 1.30) { ps -= 1; s.write(ps); Serial.println(ps); } else if (d >= 1.5) { ps += 1; s.write(ps); Serial.println(ps); } if (d <= 1.5 && d >= 1.3) { ps = 15; s.write(pi); } break; case 4: if (d < 2) { // para el cuatro ps -= 1; s.write(ps);
} if (d >= 2.50) { ps = 15; s.write(pi); } break; default: s.write(pi); break; } delay(50);}
Manual de prácticas de laboratorio Página 9
DIVISIÓN ACADÉMICA DE MECÁNICA INDUSTRIAL
Para el desarrollo del código y del sistema se tomó como referencia un sistema bola viga, con actuadores con un diagrama como el siguiente:
Y una estructura física similar en esencia a la que se muestra a continuación
Manual de prácticas de laboratorio Página 10