PROGRAMA DE TEORÍA-PROBLEMAS DE LA...
32
Grado en Ingeniería Geomática y Topografía Escuela Técnica Superior de Ingenieros en Topografía, Geodesia y Cartografía PROGRAMA DE TEORÍA-PROBLEMAS DE LA ASIGNATURA: REDES FOTOGRAMÉTRICAS Septiembre 2015 Universidad Politécnica de Madrid 1 Profesora: Isaura Alonso Martinez Profesor: Francisco García Cepeda Profesor: Pedro Miguelsanz Muñoz
Transcript of PROGRAMA DE TEORÍA-PROBLEMAS DE LA...

Grado en Ingeniería Geomática y Topografía
Escuela Técnica Superior de Ingenieros en Topografía, Geodesia y Cartografía
PROGRAMA DE TEORÍA-PROBLEMAS DE LA ASIGNATURA:
REDES FOTOGRAMÉTRICAS
Septiembre 2015
Universidad Politécnica de Madrid
1
Profesora: Isaura Alonso Martinez
Profesor: Francisco García Cepeda
Profesor: Pedro Miguelsanz Muñoz
topografia
Nota adhesiva
-Los errores que se pueden producir -desplazamiento -sistemas de desplazmineto diferentes -modelos matematicos

Edward Mikhail, James Bethel, Chris McGlone: Introduction to Modern Photogrammetry, (2001)
José L. Lerma García: Fotogrametría Moderna: Analítica y Digital, (2002)
Paul R. Wolf, Bon A. Dewitt : Elements of Photogrammetry (2000)
Karl Kraus: Photogrammetry: Geometry from images and Laser Scans, (2007)
Toni Schenk : Fotogrametría digital , (2002)
Rainer Sandau: Digital Airborne Camera, (2010)
Asignatura de Redes Fotogramétricas: BIBLIOGRAFÍA
2

Teoría. Unidad Didáctica 2: Redes Fotogramétricas
Tema 5. -Triangulación aérea con datos GNSS.
5.1. -Introducción.
5.2. -Obtención precisa de la trayectoria de vuelo.
5.3. -Consideraciones técnicas en los vuelos fotogramétricos.
5.4. -Problemas específicos en la determinación de las coordenadas de los Centros de Proyección.
5.4.1. -Excentricidad sensor-antena GPS (antenna offset).
5.4.2. -Falta de sincronización de los registros (antenna time offset).
5.4.3. -Interrupciones de señal GNSS (signal interruption).
5.4.4. -Sistemas de coordenadas de referencia utilizados (datum problem).
5.5. -Modelo de ajuste combinado de GNSS en triangulación aérea.
5.6. –Precisión de las coordenadas de los centros de proyección en una triangulación aérea.
5.7. –Diseño del apoyo de campo para AT con datos de los centros de proyección por GNSS.
3

Teoría. Unidad Didáctica 2: Objetivos específicos
• Definir y calcular los parámetros que determinan la geometría de un vuelo con fines fotogramétricos .
• Asociar los sistemas de coordenadas de una imagen/es con los procesos de orientación interna y externa.
• Definir y calcular un trabajo de triangulación aérea clásica .
• Identificar y explicar los resultados de triangulación aérea clásica .
• Conocer y calcular, si se dispone de datos adicionales INS/GNSS, las ventajas/inconvenientes en un trabajo de triangulación aérea.
• Definir y calcular un trabajo de triangulación aérea automática.
• Conocer y aplicar las estrategias de búsqueda automática de puntos homólogos sobre imágenes adyacentes .
• Conocer y aplicar los procedimientos automáticos de orientación externa indirecta.
• Conocer los procedimientos de cálculo de la orientación externa directa.
4

Tema 5. Triangulación aérea con datos GNSS
Introducción
• La tecnología GNSS (Global Navigation Satellite System) a bordo de los aviones fotogramétricos
se utiliza con dos fines:
1. Control y gestión de la misión de vuelo en tiempo real.
• El piloto dirige el avión por las trazas sobre las que se ubica el eje de las pasadas. • El navegante acciona el disparador de la cámara en el lugar de captura de imagen.
Por tanto:
• Utilización del receptor GNSS a bordo del avión en modo autónomo con observaciones de código C/A. • Se obtienen precisiones en posicionamiento en tiempo real para la ubicación del avión entre 3 – 10 m. 5

Tema 5. Triangulación aérea con datos GNSS
Introducción
2. Cálculo en postproceso de las coordenadas de los centros de proyección del sensor en el momento del registro de la información.
(Xₒ, Yₒ, Zₒ)
• El registro de datos GNSS y marcas de tiempo de disparo de la cámara.
• Procesamiento de esta información.
+
Por tanto:
ORIENTACIÓN
EXTERNA
6

Facilita la resolución de los procesos fotogramétricos:
• Orientaciones. • Triangulaciones. • Correspondencia de puntos por correlación automática.
• Ventajas en la AT:
• Consecuencias:
• Los tiempo de procesamiento disminuyen. • Las precisiones aumentan. • Los costes se minimizan.
Tema 5. Triangulación aérea con datos GNSS
Introducción
7

Tema 5. Triangulación aérea con datos GNSS
Obtención precisa de la trayectoria de vuelo
Actualmente existen tres metodologías de observación GNSS para el cálculo de la trayectoria precisa del vuelo:
Método cinemático relativo.
• Método de observación en el que se tratan los datos registrados durante el vuelo en modo postproceso.
• Se requieren datos del receptor GNSS aerotransportado y de al menos 1 receptor GNSS fijo, más efemérides
radiodifundidas.
• La precisión absoluta en la determinación de la posición podrá llegar a 0,05 m.
Las dificultades de los tres métodos radican en que el receptor del avión está continuamente en movimiento y la duración de la misión de vuelo se puede prolongar durante muchas horas.
Método Precise Point Positioning (PPP).
• Método de observación en el que se tratan los datos registrados durante el vuelo en modo postproceso.
• Se requieren datos del receptor GNSS aerotransportado, efemérides precisas y estados de los relojes de los
satélites.
• La precisión absoluta en la determinación de la posición podrá llegar a 0,25 m.
Método cinemático en tiempo real.
• Método de observación en el que se obtiene la trayectoria del avión en tiempo real.
• Se reciben correcciones diferenciales en cualquiera de los tres modos disponibles con OMNISTAR (VBS, HP y XP).
• La precisión absoluta en la determinación de la posición podrá estar por debajo de 1 m.
Las marcas de tiempo en el momento en que se obtuvo la imagen del terreno permitirán interpolar en la trayectoria.
8

Tema 5. Triangulación aérea con datos GNSS
Consideraciones técnicas en los vuelos fotogramétricos
• Registro de observaciones de fase y pseudodistancias.
• PDOP igual o menor de 3 para asegurar una geometría óptima de la constelación.
• El registro de observaciones del receptor GNSS debe ser de al menos 0,5 s.
• Utilización de receptores multifrecuencia (L1, L2, L5) y multiconstelación (GPS, Glonass, Kompass).
• …
Es importante una buena planificación del proyecto de vuelo si se quieren cumplir las condiciones de los Pliegos de Especificaciones Técnicas (precisiones en los centros de proyección, variaciones de altura de vuelo, etc.)
• Valores definidos para el GSD, recubrimientos longitudinales y transversales.
• Cumplimiento de las condiciones geométricas del vuelo, tolerancias en el GSD, p, q, ángulos de deriva,
omega etc.
• Altura solar permitida en función del propósito del vuelo.
• …
Configuración de la observación GNSS.
Geometría del vuelo.
9

Tema 5. Triangulación aérea con datos GNSS
Consideraciones técnicas en los vuelos fotogramétricos
Precisión del sistema GNSS. Los factores que limitan la precisión del posicionamiento GNSS pueden ser los siguientes: · Geometría de la constelación observada. · Precisión de la metodología de observación. · Errores en la propagación de la señal · Precisión de los modelos troposféricos e ionosféricos. · Precisión de las efemérides. · Efecto Multipath. · Errores instrumentales (composición electrónica de los receptores y antenas). · Efectos relativistas (diferencia de potencial gravitatorio).
La contribución de cada uno de estos errores individuales al error final se denomina error equivalente en la distancia
o UERE. Suponiendo que el error no está correlacionado con otras fuentes de error.
22
TDOPPDOPGDOP
PDOP = PRECISIÓN EN POSICIÓN 3D
TDOP = PRECISIÓN EN TIEMPO
GDOP = PRECISIÓN GEOMÉTRICA
10

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
i. Excentricidad sensor-antena GNSS (antena offset)
ii. Falta de sincronización de los registros (antenna time offset)
iii. Interrupciones de señal GNSS (signal interruption)
iv. Sistemas de coordenadas de referencia utilizados (datum problem)
i y ii afectan a la determinación precisa en valores absolutos de las coordenadas de los Centros de Proyección.
iii es más frecuente y grave desde el punto de vista métrico.
iv pasa por una solución puramente analítica de transformaciones espaciales con sus respectivas consideraciones
en el campo de la geodesia. Transformación 3D de semejanza.
11

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
dx
y
x
x
y
z
Distancia focal calibrada
Plano focal imagen
Centro de proyección del Sensor (Xo, Yo, Zo)
dz
Antena GPS (XGPS, YGPS, ZGPS )
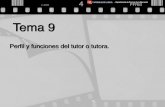
i. Excentricidad sensor-antena GNSS (antenna offset):
• El desplazamiento entre el centro de proyección y el centro de fase de la antena debe conocerse con precisión.
• Esa excentricidad debe estar referida al sistema de coordenadas imagen.
Descripción.
dL (dx, dy, dz)
12

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
i. Excentricidad sensor-antena GNSS (antenna offset):
Determinación de la excentricidad en tierra.
Determinación de la excentricidad en vuelo:
• Métodos topográficos convencionales.
• Si la cámara permite la nivelación:
• Los movimientos deben conocerse, considerarse y corregirse a efectos de cálculo.
• Si la cámara está anclada al avión:
• Mantiene la relación geométrica del vector desplazamiento (offset).
• Posibilidad de perder la cobertura del terreno debido a la nivelación y deriva. 13

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
• En el fuselaje del avión sobre la cámara:
• Ventajas:
• Alineación del centro de fase en la dirección del eje óptico de la cámara. • Medida del offset y modelo matemático simple. • El ángulo de deriva prácticamente no afecta. • Las correcciones por inclinación son insignificantes para escalas medias y grandes.
• Desventajas:
• Incrementa la probabilidad del rebote de ondas (multipath). • El ala del avión puede hacer sombra (shadowing), con la consiguiente pérdida de señal. • Requiere modificaciones especiales del avión.
• En el estabilizador vertical:
• Ventajas:
• Reducción de las posibilidades de Multipath y Shadowing. • Instalación sencilla.
• Desventajas:
• Problemas en la determinación del vector offset.
i. Excentricidad sensor-antena GNSS (antenna offset):
Localización de la antena GNSS en el avión:
14

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
i. Excentricidad sensor-antena GNSS (antenna offset):
Localización de la antena GNSS en el avión:
• Cuanto más cerca de la vertical de la cámara se encuentre la antena GNSS, menor será el efecto de
desplazamiento debido a los giros del avión.
• Si se equipa al sensor de un sistema INS/GNSS, la orientación de la plataforma giroestabilizada podrá ser
conocida y eliminar su efecto sobre el offset sensor-antena. 15

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
i. Excentricidad sensor-antena GNSS (antenna offset):
Offset existente entre el plano focal y centro de proyección (Pupila de entrada) del sistema de lentes:
• Al offset existente entre antena GNSS y el plano focal de la cámara o sensor, se debe sumar la focal y la
distancia internodal, distancia FG.
• Este último valor de distancia internodal es un valor fijo y definido por el fabricante de la cámara.
16

Las diferencias entre ambas interpolaciones es despreciable en vuelos uniformes pero con turbulencias hay que
considerar las posibles diferencias
ii. Falta de sincronización de los registros (antenna time offset).
Instante en la exposición de la imagen.
Trayectoria real del avión.
Registro de datos (épocas) GNSS.
Interpolación de la trayectoria.
Cuanto mayor es la frecuencia de registro de los datos GNSS, es decir menor distancia entre los centros de proyección, mayor precisión se
obtiene en la interpolación de las coordenadas del sensor.
La interpolación suele ser de dos tipos:
Lineal. Toma como datos las posiciones espaciales y los tiempos GNSS de la antena en las épocas precedente y
siguiente al de la exposición.
No lineal. Adicionalmente al caso anterior, registra las aceleraciones entre épocas. Por lo tanto, en el cálculo
incluye las velocidades del avión en las diferentes épocas.
Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
• El receptor GNSS y la cámara toman datos de forma asíncrona.
• Se debe interpolar la posición de la antena en el momento del disparo.
17

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
Las interrupciones o pérdidas de señal se pueden producir por tres causas principalmente:
Métodos de reparación de pérdidas de ciclo.
iii. Interrupciones de señal GNSS (signal interruption).
• Giros bruscos del avión durante la misión de vuelo. Generalmente al realizar el cambio de pasada.
• Efectos ionosféricos y troposféricos pueden
provocar pérdidas de señal incluso cuando el avión
circula en línea recta.
• Un mal funcionamiento en la electrónica de
receptores y antenas puede provocar la pérdida de
señal.
La consecuencia directa de tener pérdidas de señal de
los satélites es errores en la determinación de N,
ambigüedad de fase.
• Existen técnicas para la reparación de pérdidas de ciclo o señales seguidas a los satélites. Son más eficientes las
que funcionan en postproceso, aunque también hay subrutinas implementadas en los receptores para mitigar este
suceso.
• Para su determinación y reparación se utilizan observaciones adicionales como pueden ser los datos doppler
registrados sobre las portadoras. 18

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
• La ambigüedad de fase no siempre es un número entero, se puede dejar en flotante.
• Esto permite mayor flexibilidad en las condiciones de vuelo, los giros pueden ser más inclinados.
• Se busca la máxima precisión relativa entre centros de proyección, pese a perder precisión absoluta.
• Distancia entre “Master” y “Rover” < 400 km.
• Inconveniente: al tener peor precisión los CP, se precisa de más PCM que el método OTF para un determinado
bloque de aerotriangulación.
Métodos de resolución de ambigüedades en cinemático.
Técnicas OTF (on-the-fly).
• Se requiere la máxima precisión en la determinación de N.
• Requiere la máxima precisión en la medición del offset cámara-
antena GNSS.
• Se obtiene la máxima precisión absoluta en los CP.
• Distancia entre “Master” y “Rover” < 50 - 70 km.
• Las condiciones de vuelo son muy rigurosas (giros suaves).
Técnicas CBA (Combine Block Adjustment).
19

Tema 5. Triangulación aérea con datos GNSS
Problemas específicos en la determinación de las coordenadas de los centros de proyección
iv. Sistemas de Referencia utilizados (datum problem).
•La tecnología GNSS representa un gran avance para la fotogrametría. Pero el proceso de trabajo en la producción cartográfica
conlleva la utilización de datos GNSS en diferentes sistemas de referencia al WGS84.
•Por tanto, se muestra la secuencia de transformaciones de coordenadas que se necesitan para establecer el correspondiente
Sistema de Referencia:
Coordenadas cartográficas:
(X,Y)UTM, Hortométrica
Coordenadas WGS 84 relativas o absolutas (X,Y,Z)WGS 84
Coordenadas geodésicas:
(, , helipsoidal) Transformación tridimensional
Coordenadas Locales:
(X,Y,Z)R
Coordenadas Locales:
(X,Y,Z)R
Coordenadas cartográficas:
(X,Y)UTM, Hortométrica
Puntos de CM en SR
cartográfico
Puntos de CM en SR WGS84
Aerotriangulación haces:
(X,Y,Z)R
20
Parámetros de transformación entre los dos SR

Tema 5. Triangulación aérea con datos GNSS
Modelo de ajuste combinado GNSS en triangulación aérea
G
A
CP
A
CP
A
CP
G
CP
CP
CP
G
A
A
A
Z
Y
X
Z
Y
X
Z
Y
X
• Descripción de subíndices y SR asociados:
GAAA ZYX ,, : Coordenadas de la Antena GNSS respecto el SR (G).
GCPCPCP ZYX ,, : Coordenadas del Centro de Proyección respecto
el SR (G).
GA
CP
A
CP
A
CP ZYX ,, : Vector existente entre la Antena GNSS y el Centro
de proyección de la cámara en el SR (G).
• El vector existente entre la Antena GNSS y el Centro de Proyección en el SR(G) adquiere una posición absoluta
diferente en cada instante de observación.
• Debe ser medido con respecto a un sistema de referencia topográfico SR(T) y referirlo al sistema de referencia
imagen SR(F) en cada instante.
SR (G): Sistema de Referencia Terreno.
SR (T): Sistema de Referencia Topográfico.
SR (F): Sistema de Referencia Imagen.
G
CP
CP
CP
G
A
A
A
Z
Y
X
Z
Y
X
Modelo matemático del ajuste combinado GNSS en aerotriangulación.
21

Tema 5. Triangulación aérea con datos GNSS
Modelo de ajuste combinado GNSS en triangulación aérea
t
A
CP
A
CP
A
CP
G
A
CP
A
CP
A
CP
Z
Y
X
RR
Z
Y
X
),,(),,( *
• La medición del offset Antena GNSS – Centro de
Proyección de la cámara en un SR topográfico (T),
permitirá relacionarlo con el SR terreno (G)
mediante dos matrices de rotaciones.
• Siendo:
),,( R
),,( R
: Matriz de rotación existente entre el SR (T) y el SR (F).
: Matriz de rotación existente entre el SR (F) y el SR (G).
Modelo matemático del ajuste combinado GNSS en aerotriangulación.
22

Tema 5. Triangulación aérea con datos GNSS
Modelo de ajuste combinado GNSS en triangulación aérea
t
A
CP
A
CP
A
CP
G
A
CP
A
CP
A
CP
Z
Y
X
RR
Z
Y
X
),,(),,( *
G
A
CP
A
CP
A
CP
G
CP
CP
CP
G
A
A
A
Z
Y
X
Z
Y
X
Z
Y
X
• Sustituyendo (1) en (2):
(1) (2)
t
A
CP
A
CP
A
CP
G
CP
CP
CP
G
A
A
A
Z
Y
X
RR
Z
Y
X
Z
Y
X
),,(),,( *
• Se obtendrá la ecuación (3), que sería el modelo matemático de ajuste combinado GNSS en triangulación aérea:
(3)
Modelo matemático del ajuste combinado GNSS en aerotriangulación.
: Matriz de rotación existente entre el SR (T) y el SR (F).
• En caso de que el montaje de la cámara y la antena GNSS sea permanente, este valor será una matriz constante.
• En caso de que la cámara esté montada sobre una Plataforma
Giroestabilizadora, estos valores dependerán de la orientación instantánea que tenga en cada momento. 23
),,( R
topografia
Nota adhesiva
A= Antena

Tema 5. Triangulación aérea con datos GNSS
Modelo de ajuste combinado GNSS en triangulación aérea
Modelo matemático del ajuste combinado GNSS en aerotriangulación.
• Expresándolo en forma matricial para cada imagen i de una pasada p:
• Cada vez que se introduzcan coordenadas precisas de los centros de proyección, se incluirá una ecuación de este
tipo dentro del modelo matemático de la aerotriangulación por Haces de Rayos.
𝑟𝐴𝑖 + 𝑟𝑙 = 𝑟𝑖
𝐶𝑃 + 𝑅𝜔,𝜑,𝜅 ∙ 𝑅𝛼,𝛽,𝛾 ∙ ∆𝑙
• Siendo:
: coordenadas GNSS de la antena en el momento de la toma, en el sistema local (terreno) para una imagen i dada.
: coordenadas del Centro de Proyección para una imagen i determinada.
: residuos.
: matriz de rotación que relaciona el SR imagen (F) con el SR terreno (G).
: Vector de la antena GNSS y el centro de proyección del sensor (offset) en el SR topográfico (F).
t
A
CP
A
CP
A
CP
G
CPi
CPi
CPiG
Z
Y
X
G
Ai
Ai
Ai
Z
Y
X
RR
Z
Y
X
r
r
r
Z
Y
X
),,(),,( *
𝑟𝐴𝑖
𝑟𝑙
𝑟𝑖𝐶𝑃
∆𝑙
𝑅𝜔,𝜑,𝜅
𝑅𝛼,𝛽,𝛾 : Matriz de rotación existente entre el SR (T) y el SR (F).
24

Tema 5. Triangulación aérea con datos GNSS
Modelo de ajuste combinado GNSS en triangulación aérea
• La utilización de estos parámetros variacionales en la AT permite corregir errores sistemáticos presentes en las
coordenadas de los centros de proyección obtenidos por técnicas de procesamiento GNSS y debidos a los siguientes
factores:
• Incorrectas ambigüedades de fase originadas por pérdidas de señal de los receptores GNSS causadas por diversos factores.
• Imprecisiones en la determinación de las efemérides de los satélites.
• Modelos atmosféricos imprecisos que fueron empleados para controlar la variación en la propagación de la señal cuando se tratan grandes distancias entre Master y Rover en el método cinemático.
• Cambios en la geometría de los satélites durante la ejecución de la misión de vuelo.
• A estas ecuaciones se le podrán incluir unos nuevos parámetros variacionales, además de los que se incluían en el
procedimiento estándar de aerotriangulación.
• Imperfecciones en la medición de los offset.
• De esta forma las ecuaciones anteriores quedarán: 25

Tema 5. Triangulación aérea con datos GNSS
Modelo de ajuste combinado GNSS en triangulación aérea
Modelo matemático del ajuste combinado GNSS en aerotriangulación con parámetros variacionales.
• El modelo matemático utilizado en la aerotriangulación es el de Haces de Rayos incluyendo parámetros
variacionales quedará:
𝐵1𝑋1 + 𝐵2𝑋2 + 𝐵3𝑋3-L = V
a : parámetros desconocidos de deriva (incógnitas) y corresponden con las traslaciones (shifts).
b : parámetros desconocidos de deriva (incógnitas) y corresponden con la propia deriva (drifts). Es función del tiempo transcurrido entre el momento de toma t’
y el de referencia de deriva td, normalmente en la pasada p.
• Expresándolo en forma matricial:
• Recordando la expresión de las ecuaciones de colinealidad con parámetros variacionales:
𝑟𝐴𝑖 + 𝑟𝑙 = 𝑟𝑖
𝐶𝑃 + 𝑅𝜔,𝜑,𝜅 ∙ 𝑅𝛼,𝛽,𝛾 ∙ ∆𝑙 + (𝑎 + 𝑏 ∙ 𝑡)
p
d
z
y
x
z
y
x
t
A
CP
A
CP
A
CP
G
CPi
CPi
CPiG
Z
Y
X
G
Ai
Ai
Ai
tt
b
b
b
a
a
a
Z
Y
X
RR
Z
Y
X
r
r
r
Z
Y
X
'* ),,(),,(
i : Elemento i-ésimo identificando el número de imagen.
p : Elemento p-ésimo identificando el número de pasada.
26

Tema 5. Triangulación aérea con datos GNSS
Modelo de ajuste combinado GNSS en triangulación aérea
29

Tema 5. Triangulación aérea con datos GNSS
Modelo de ajuste combinado GNSS en triangulación aérea
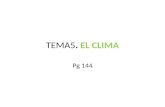
dX (m)
Tiempo (s)
tan (bx )
ax
1
0
2
Interpretación geométrica de los parámetros de la deriva a y b
10 20 30 40 50
30

Tema 5. Triangulación aérea con datos GNSS
Precisión de las coordenadas de los centros de proyección en una aerotriangulación
• Precisión de los Centros de Proyección en una AT asistida con datos GNSS sin parámetros variacionales.
• La precisión dependerá de la escala del bloque y de la varianza de referencia a priori que consideremos σₒ.
En el caso de los centros de proyección dicha precisión será la mitad del producto del denominador de la
escala y la varianza de referencia a priori.
• Precisión de los puntos de Control Mayor en una aerotriangulación.
• La precisión dependerá de la escala del bloque y de la varianza de referencia a priori que consideremos σₒ.
𝜇𝑥𝑦𝑧 = 2 ∙ 𝐷𝑒 ∙ 𝜎0
𝜇𝑥𝑦𝑧 = 𝐷𝑒 ∙ 𝜎0
• Se debe elegir el procedimiento correcto y metodología de observación más apropiada para garantizar la
precisión debida tanto en los puntos de Control Mayor como en los Centros de Proyección.
Manual Orima
31
topografia
Nota adhesiva
......de la escala por la varianza de referencia a priori.
topografia
Nota adhesiva
De=Escala

Tema 5. Triangulación aérea con datos GNSS
Precisión de las coordenadas de los centros de proyección en una aerotriangulación
• Precisión de los CP en una AT asistida con datos GNSS con parámetros variacionales.
• Al utilizar parámetros variacionales en el proceso de AT se está dando por hecho que la precisión en los
centros de proyección no es la que se aconseja en el apartado anterior.
• Conclusión: habrá que diseñar un apoyo de campo más nutrido para que los parámetros variacionales
introducidos como incógnitas en la AT determinen unos términos a y b que permitan encajar cada pasada
en coordenadas absolutas.
32

Tema 5. Triangulación aérea con datos GNSS
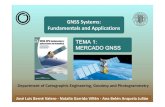
Diseño del apoyo de campo para AT con datos de los CP por GNSS
• Ubicación y cantidad de PCM en caso de que el bloque sea de grandes dimensiones.
33

Tema 5. Triangulación aérea con datos GNSS
Diseño del apoyo de campo para AT con datos de los CP por GNSS
• Ubicación y cantidad de PCM en caso de que el bloque sea de tamaño estándar.
34