Modelado y Simulación de un Sistema de Planta … 4... · Modelado y Simulación de un Sistema de...
12
Sexto Coloquio Interdisciplinario de Doctorado – Universidad Popular Autónoma del Estado de Puebla 1 Modelado y Simulación de un Sistema de Planta Industrial de Dos Tanques María Anaya Pérez 1 , Victor Benitez Baltazar 2 1 Universidad Popular Autónoma de Puebla [email protected] 2 Universidad de Sonora [email protected] Resumen En el presente trabajo se propone un modelo matemático para un sistema de dos tanques, así como también la simulación de ese modelo llevada a cabo en software Matlab-SIMULINK. Lo que aquí presentamos es un avance del proyecto de investigación “Puesta en operación de un sistema de entrenamiento de control de procesos y evaluación de controladores industriales”, por lo que en esta primera etapa, se da a conocer la información que se desarrolló en la obtención del modelo matemático, al igual que en su linealización y los resultados de las simulaciones llevadas a cabo al aplicar el modelo de simulación obtenido para tres diferentes puntos de operación del sistema. En la sección final, al concluir, se da a conocer la importancia de cada uno de los pasos realizados de acuerdo a la metodología aplicada, además de proporcionar una breve información que se refiere al trabajo futuro de la etapa de experimentación. Palabras Clave Sistema de dos tanques, Modelo matemático, Modelo de simulación. 1. Introducción El control de procesos es un área de oportunidad existente en el ámbito industrial, tanto en implementación directa para el caso de plantas industriales ya existentes, como en la investigación para su diseño, desarrollo y modificación en equipos experimentales. De manera particular, el análisis de sistemas de fluidos y sistemas térmicos son de interés especial por ser el medio más versátil para transmitir señales y potencia; los fluidos tienen un amplio uso en la industria. Diferentes sistemas de nivel de líquido son utilizados frecuentemente en el control de procesos industriales, (Ogata, 2003) y (Smith y Corripio, 2008), por lo que una motivación al desarrollar este trabajo es contar con una planta de entrenamiento en operación, esperando así incidir directamente en la formación de ingenieros especializados en el análisis y sintonización de controladores industriales y con ello contribuir a cubrir la demanda que existe de profesionistas altamente capacitados en las diferentes industrias en México. En la revisión de bibliografía efectuada, se encontraron varios modelos de sistemas de tanques: con o sin iteración, posicionados en distintos niveles; de uno, dos, tres o más tanques; representados por ecuaciones diferenciales de primer y segundo orden. El sistema que aquí se presenta es de dos tanques y en este trabajo se da a conocer la propuesta de utilizar un modelo linealizado para llevarlo a la simulación, manteniendo presente que la etapa posterior será la experimentación en el sistema físico aplicando reglas de sintonización. 2. Marco teórico Teniendo como base que la descripción matemática de las características dinámicas de un sistema se denomina modelo matemático, se sabe que una vez que este modelo se obtiene, es necesario definir su sencillez o complejidad con la finalidad de que, el análisis llevado a cabo, sea lo que justamente represente el sistema físico en estudio. El término sistemas dinámicos es utilizado para describir sistemas cuyos parámetros internos siguen una serie de reglas temporales. Desde el punto de vista analítico, se llaman sistemas porque están descritos por un conjunto de ecuaciones y dinámicos porque sus parámetros varían con respecto a alguna variable que generalmente es el tiempo. Con lo anterior, el primer paso y el más importante en el análisis de un sistema dinámico, es por consecuencia, elaborar su modelo, lo cual frecuentemente es posible caracterizarlo utilizando ecuaciones diferenciales que al
-
Upload
vuongtuyen -
Category
Documents
-
view
224 -
download
1
Transcript of Modelado y Simulación de un Sistema de Planta … 4... · Modelado y Simulación de un Sistema de...

Sexto Coloquio Interdisciplinario de Doctorado – Universidad Popular Autónoma del Estado de Puebla
1
Modelado y Simulación de un Sistema de Planta Industrial de Dos
Tanques
María Anaya Pérez 1, Victor Benitez Baltazar
2
1Universidad Popular Autónoma de Puebla
2Universidad de Sonora
Resumen
En el presente trabajo se propone un modelo matemático para un sistema de dos tanques, así como también la
simulación de ese modelo llevada a cabo en software Matlab-SIMULINK. Lo que aquí presentamos es un avance
del proyecto de investigación “Puesta en operación de un sistema de entrenamiento de control de procesos y
evaluación de controladores industriales”, por lo que en esta primera etapa, se da a conocer la información que se
desarrolló en la obtención del modelo matemático, al igual que en su linealización y los resultados de las
simulaciones llevadas a cabo al aplicar el modelo de simulación obtenido para tres diferentes puntos de operación
del sistema. En la sección final, al concluir, se da a conocer la importancia de cada uno de los pasos realizados de
acuerdo a la metodología aplicada, además de proporcionar una breve información que se refiere al trabajo futuro de
la etapa de experimentación.
Palabras Clave
Sistema de dos tanques, Modelo matemático, Modelo de simulación.
1. Introducción El control de procesos es un área de oportunidad existente en el ámbito industrial, tanto en implementación directa
para el caso de plantas industriales ya existentes, como en la investigación para su diseño, desarrollo y modificación
en equipos experimentales. De manera particular, el análisis de sistemas de fluidos y sistemas térmicos son de
interés especial por ser el medio más versátil para transmitir señales y potencia; los fluidos tienen un amplio uso en
la industria. Diferentes sistemas de nivel de líquido son utilizados frecuentemente en el control de procesos
industriales, (Ogata, 2003) y (Smith y Corripio, 2008), por lo que una motivación al desarrollar este trabajo es
contar con una planta de entrenamiento en operación, esperando así incidir directamente en la formación de
ingenieros especializados en el análisis y sintonización de controladores industriales y con ello contribuir a cubrir la
demanda que existe de profesionistas altamente capacitados en las diferentes industrias en México.
En la revisión de bibliografía efectuada, se encontraron varios modelos de sistemas de tanques: con o sin iteración,
posicionados en distintos niveles; de uno, dos, tres o más tanques; representados por ecuaciones diferenciales de
primer y segundo orden. El sistema que aquí se presenta es de dos tanques y en este trabajo se da a conocer la
propuesta de utilizar un modelo linealizado para llevarlo a la simulación, manteniendo presente que la etapa
posterior será la experimentación en el sistema físico aplicando reglas de sintonización.
2. Marco teórico
Teniendo como base que la descripción matemática de las características dinámicas de un sistema se denomina
modelo matemático, se sabe que una vez que este modelo se obtiene, es necesario definir su sencillez o complejidad
con la finalidad de que, el análisis llevado a cabo, sea lo que justamente represente el sistema físico en estudio.
El término sistemas dinámicos es utilizado para describir sistemas cuyos parámetros internos siguen una serie de
reglas temporales. Desde el punto de vista analítico, se llaman sistemas porque están descritos por un conjunto de
ecuaciones y dinámicos porque sus parámetros varían con respecto a alguna variable que generalmente es el tiempo.
Con lo anterior, el primer paso y el más importante en el análisis de un sistema dinámico, es por consecuencia,
elaborar su modelo, lo cual frecuentemente es posible caracterizarlo utilizando ecuaciones diferenciales que al

María Anaya Pérez, Victor Benitez Baltazar
2
resolverlas se obtiene, por lo general, la respuesta a una entrada del sistema en cuestión. Teniendo claro que es
necesario recurrir a las leyes físicas adecuadas para describir el o los comportamientos presentes en el sistema y que
una vez obtenido el modelo se tiene la opción de usar alguna herramienta analítica y/o computacional para su
análisis y síntesis, (Ogata, 1980).
2.1 Control de procesos
Al grupo de tecnologías que son requeridas, ya sea para diseñar y/o para implementar sistemas de control en la
industria de la transformación (industria química, petrolera, farmacéutica, cementera, etc.), se le llama control de
procesos; siendo su finalidad la de mantener y regular todas aquellas características del proceso en los niveles
óptimos para un adecuado desempeño, (Smith y Corripio, 2008).
El modelado, la simulación computacional, optimización, uso de software y hardware específico, diseño de
estructuras de control, monitoreo y diagnóstico de procesos, son algunas técnicas involucradas en el control de
procesos.
2.2 Respuesta transitoria y respuesta en estado estacionario
Obtenido el modelo matemático, es necesario asegurarse de que éste representa un comportamiento muy
aproximado al del sistema en estudio. Para este caso es justificable utilizar señales de prueba como entrada al
sistema y analizar su respuesta, debido a la correlación existente entre las características de un sistema a una señal
de entrada típica de prueba y la posibilidad del sistema de manejar señales reales de entrada.
Las señales de entrada de prueba más comúnmente usadas son las funciones escalón, rampa, aceleración, impulso,
sinusoidales, etc. Con estas señales de prueba se pueden realizar análisis experimentales y matemáticos de los
sistemas de control con facilidad, ya que las señales son funciones muy simples del tiempo.
La respuesta temporal de un sistema de control consiste en dos partes: la respuesta transitoria y la estacionaria. La
respuesta transitoria es aquella que va desde el estado inicial al estado final y por respuesta estacionaria se entiende
la forma en la que la salida del sistema se comporta cuando t (tiempo) tiende a infinito, (Ogata, 1980).
2.2.1 Especificaciones de respuesta transitoria
La respuesta transitoria de un sistema de control frecuentemente presenta oscilaciones amortiguadas antes de
alcanzar el estado estacionario. Al especificar las características de respuesta transitoria de un sistema de control a
una entrada escalón unitario, es habitual especificar la respuesta transitoria, tal como se muestra en la Figura 1,
(Ogata, 1980).
Figura 1: Curva de respuesta a escalón unitario con td,, tr, tp, Mp y ts.
2.3 Errores en estado estacionario en los sistemas de control
Los errores que se presentan en los sistemas de control provienen de diferentes fuentes o factores. Entre estos errores
se tiene el tipo de error en estado estacionario, el cual es una medida de la exactitud de un sistema de control para
seguir una entrada dada, una vez que la respuesta transitoria desaparece. Una causa particular de este tipo de error es
el provocado por la incapacidad del sistema de seguir determinando tipos de entradas. Finalmente el que un sistema
en particular exponga un error en estado estacionario para un determinado tipo de entrada dependerá del tipo de
función de transferencia en lazo abierto del sistema. En la Figura 2 se presenta una gráfica indicando que el error en
un sistema de control es la diferencia entre el valor deseado r(t) y el valor actual c(t), de la variable controlada. El
Tiempo de retardo td
Tiempo de subida tr
Tiempo pico tp
Sobre-elongación Mp
Tiempo de asentamiento ts

María Anaya Pérez, Victor Benitez Baltazar
3
error en estado estacionario es aquel que permanece después de que se ha desaparecido el transitorio, (Lara y Rocha,
2012).
Figura 2: Error en un sistema
2.3.1 Clasificación de los sistemas de control
Existen diferentes clasificaciones de los sistemas de control, y esto depende de la estructura de la planta pudiendo
ser sistemas lineales, no lineales, sistemas en tiempo continuo o discreto, sistemas determinísticos y estocásticos,
etc. Sin embargo para el propósito de nuestro trabajo emplearemos la clasificación conocida como orden de un
sistema la cual nos brinda información más valiosa sobre la estructura matemática que otras clasificaciones pudieran
hacerlo.
Los sistemas de control se clasifican de acuerdo con su capacidad de seguir entradas escalón, rampa, parábola, etc.
Considere un sistema de control con realimentación unitaria que está dado por la siguiente función de transferencia
en lazo abierto G(s):
���� ������ 1����� 1�… �� � 1������� 1����� 1�… ���� 1�
(1)
Este sistema contiene el término �� en el denominador, que representa un polo de multiplicidad N en el origen. El
esquema de clasificación se basa en la cantidad de integradores indicados por la función de transferencia en lazo
abierto.
Un sistema se denomina de tipo 0, si N=0, de tipo 1, si N=1, de tipo 2, si N=2,…, etc., (Lara y Rocha, 2012).
2.3.2. Representación y definición de las constantes de error
En la Tabla 1 se presentan las constantes de error, (Ogata, 2003).
Tabla 1: Constantes de error
Tipo de constante de error Representación Definida mediante
Posición estática Kp �� � lim�→�
���� � ��0�
Velocidad estática Kv �� � lim�→�
�����
Aceleración Estática Ka �� � lim�→�
������
2.3.3. Error en estado estacionario en función de la ganancia K La Tabla 2 presenta un resumen de los errores en estado estacionario para los sistemas tipo 0, tipo 1 y tipo 2 cuando
se encuentran sujetos a distintas entradas, (Ogata, 2003).
Tabla 2: Error en estado estacionario en función de la ganancia K
Entrada escalón
r(t) = 1
Entrada rampa
r(t) = t
Entrada aceleración
r(t) = � �⁄ ��
Sistema tipo 0 1 �1 ��⁄ ∞ ∞
Sistema tipo 1 0 1 �⁄ ∞
Sistema tipo 2 0 0 1 �⁄
María Anaya Pérez, Victor Benitez Baltazar
4
2.4.- Modelo linealizado
La técnica de linealización permite aproximar las ecuaciones no lineales que representan un proceso, a ecuaciones
lineales que se pueden analizar de una forma más sencilla. La suposición básica es que la respuesta de la
aproximación lineal representa la respuesta del proceso en la región cercana al punto de operación, alrededor del
cual se realiza la linealización. Una de las herramientas utilizadas para este fin es la expansión por series de Taylor,
(Smith y Corripio, 2008).
3.- Metodología La metodología aplicada en este trabajo es la de Diseño Basado en Modelos (MBD, por sus siglas en inglés), la cual
es un método matemático usado para abordar los problemas asociados con el diseño de procesamiento de señales y
el control de los sistemas complejos. Este modelo, hasta el avance actual de nuestro trabajo, se ha aplicado
parcialmente. Los pasos que de esta metodología se han aplicado son:
• Modelación.- La modelación se llevó a cabo durante el proceso de la obtención del modelo matemático,
iniciando con el análisis de la física del sistema para terminar con las ecuaciones diferenciales que lo
caracterizan.
• Linealización.- Una de las características importantes a considerar del sistema, es la saturación de la
servoválvula, ya que se trabajaría con un modelo no lineal provocando algunas dificultades al momento de
la simulación, por lo que es importante que sea linealizado con la finalidad de lograr la simplificación en el
análisis y un diseño de controladores más sencillo desde el punto de vista computacional. Además de que
solamente a los sistemas lineales se les puede aplicar el principio de superposición y el principio de
proporcionalidad.
• Simulación.- Mediante la elaboración de diagramas de bloques adecuados y representativos de cada una de
las ecuaciones linealizadas que forman el modelo matemático del sistema de dos tanques, se desarrolló la
simulación en la plataforma computacional Matlab- SIMULINK.
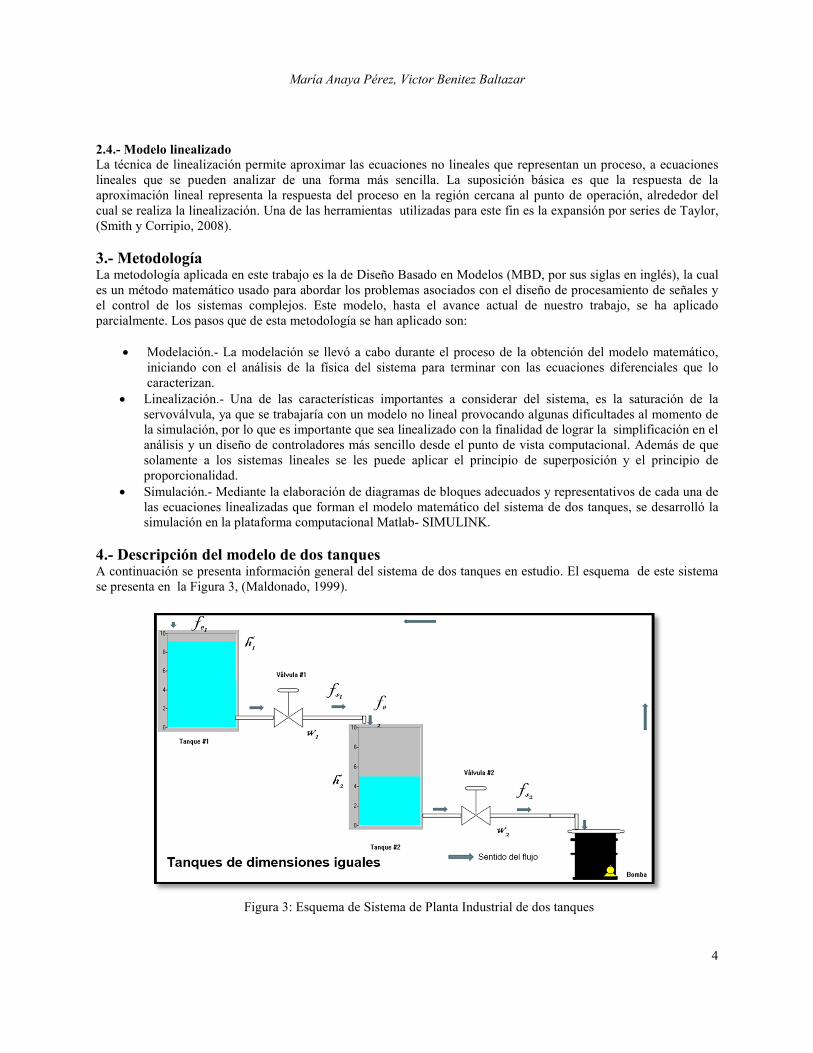
4.- Descripción del modelo de dos tanques A continuación se presenta información general del sistema de dos tanques en estudio. El esquema de este sistema
se presenta en la Figura 3, (Maldonado, 1999).
Figura 3: Esquema de Sistema de Planta Industrial de dos tanques
María Anaya Pérez, Victor Benitez Baltazar
5
El funcionamiento de este sistema de dos tanques se lleva a cabo con la interacción entre una bomba y una fuente
de energía, que hace fluir el líquido por una tubería transportándolo del Tanque #1 al Tanque #2 y pasando a través
de una servoválvula la cual restringirá el paso del fluido tal que se tenga el nivel de líquido deseado o necesario para
operar.
4.1 Sistema físico de dos tanques
La siguiente información corresponde al sistema físico experimental de dos tanques, incluyendo la siguiente lista de
las especificaciones técnicas de la Planta:
• Alimentación general 120 CA, 60 Hz.
• Fuente de alimentación de 24 VCD, 3 Amp.
• Software de configuración ADAM 4000 utility.
• Software de programación Adamview.
• Medidas 680 y 680 x 400 (mm).
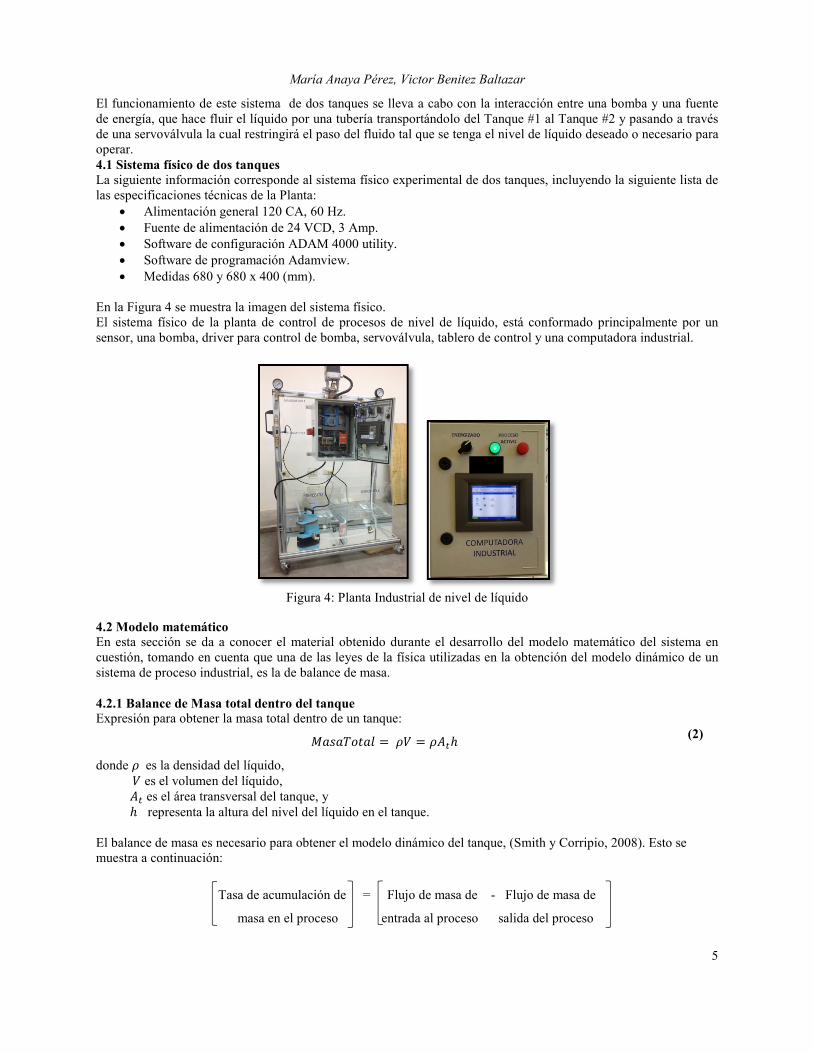
En la Figura 4 se muestra la imagen del sistema físico.
El sistema físico de la planta de control de procesos de nivel de líquido, está conformado principalmente por un
sensor, una bomba, driver para control de bomba, servoválvula, tablero de control y una computadora industrial.
Figura 4: Planta Industrial de nivel de líquido
4.2 Modelo matemático En esta sección se da a conocer el material obtenido durante el desarrollo del modelo matemático del sistema en
cuestión, tomando en cuenta que una de las leyes de la física utilizadas en la obtención del modelo dinámico de un
sistema de proceso industrial, es la de balance de masa.
4.2.1 Balance de Masa total dentro del tanque Expresión para obtener la masa total dentro de un tanque:
� � �!" # � $% � $&'( (2)
donde $ es la densidad del líquido,
% es el volumen del líquido,
&' es el área transversal del tanque, y
( representa la altura del nivel del líquido en el tanque.
El balance de masa es necesario para obtener el modelo dinámico del tanque, (Smith y Corripio, 2008). Esto se
muestra a continuación:
Tasa de acumulación de = Flujo de masa de - Flujo de masa de
masa en el proceso entrada al proceso salida del proceso

María Anaya Pérez, Victor Benitez Baltazar
6
)�$&'(�)"
� $*+ − $*�
(3)
donde *+ y *� representan los flujos de entrada y salida respectivamente, (Ollero y Fernández, 2006).
Si $y &', son constantes, de la ecuación (3) tenemos que:
&')()"
� �*+ − *��
(4)
Ya que la válvula se encuentra colocada, de acuerdo a la Figura 3, a la salida del tanque y considerando el Teorema
de Toricelli, además de información proporcionada en (Ogata, 2003) y (Smith y Corripio, 2008), el flujo a la salida
de la válvula esta representado por la siguiente expresión:
*� � -�-.&�/21( (5)
en donde,
-� es el coeficiente de velocidad o flujo,
-. es el coeficiente de contracción,
&� es el área del orificio, y
1 es la gravedad atmosférica
Si se define 2 � -�-.&�/21 , entonces la ecuación (5) se reduce a la siguiente expresión:
*� � 2√( (6)
donde 2, es el factor de apertura de la válvula (Barrietos, Sanz, Matía y Gamboa, 1996).
Sustituyendo la ecuación (6) en la ecuación (4), se obtiene la ecuación que describe el comportamiento dinámico del
tanque y la válvula, lo cual se presenta como:
&')(�"�)"
� *+ − 2�"�/(�"�
(7)
A partir de la ecuación (4), y sustituyendo los valores correspondientes a las variables de cada tanque de acuerdo a la
Figura 3, se obtiene el comportamiento dinámico para el sistema de dos tanques conectados en cascada,
considerando que *�� � *+� para el segundo tanque, se tiene:
(4��"� �*+�&'
−*��&'
(8)
(4��"� �*��&'
−*��&'
Sustituyendo la ecuación (6) en la ecuación (8) se obtienen las siguientes expresiones:
(4��"� �*+�&'
−2��"�/(��"�
&'
(9)
(4��"� �2��"�/(��"�
&'−2��"�/(��"�
&'
Estas ecuaciones serán utilizadas para describir el comportamiento de los tanques alrededor de distintos puntos de
operación.
4.2.2 Parámetros del sistema

María Anaya Pérez, Victor Benitez Baltazar
7
Con la finalidad de describir el comportamiento dinámico total del sistema representado por las ecuaciones (9), es
necesario obtener los parámetros, este procedimiento se realiza de acuerdo a lo siguiente:
• Se obtienen modelos lineales en diferentes puntos de operación en lugar de un solo modelo no lineal de la
dinámica de la válvula.
• La identificación del modelo dinámico se obtiene a partir de la respuesta transitoria de la válvula.
• Se caracteriza el comportamiento dinámico de la válvula.
Por un lado de la ecuación (6) se tiene que si el flujo *� se mantiene constante, para obtener un nivel de líquido (
constante, es necesario un determinado valor para la apertura de la válvula 2 . Por otro lado, 2 depende
proporcionalmente del voltaje de entrada 5 (Maldonado, 1999), es decir:
2 � 65
(10)
en dónde 6 es una constante proporcional.
Para cada punto de operación deseado (h � nivel de líquido constante), se obtiene el valor de 2 a partir de la
ecuación (6), con *� el flujo real constante que proporciona la bomba. Se registra el voltaje aplicado a la válvula.
Conociendo *� y h , 2 se obtiene aplicando un despeje en la ecuación (6):
2 �*�√(
� 65
(11)
Se aplica una entrada escalón por cada voltaje registrado observando el comportamiento en el tiempo de la apertura
de la válvula (respuesta), el cual debe ser medido para determinar su apertura respecto al tiempo.
Con la respuesta de la válvula en cada punto de operación, se observa que es posible representar su dinámica
aproximada a través de la Respuesta Temporal de un Sistema de Primer Orden al Escalón, siendo la función de
transferencia para tal sistema, la siguiente: 2���5���
��+
1 ��
(12) en dónde,
�+ es la ganancia estática,
� es la constante de tiempo,
w representa la razón de apertura de la válvula, y
v es el voltaje de entrada aplicado a la válvula.
Los parámetros utilizados en la ecuación (12) son de los cuales se presentan las características en las Tablas 3 y 4
(Maldonado, 1999), para tres puntos de operación.
Tabla 3: Características de los tres modelos para la válvula #1.
Punto de operación 25 cm 35 cm 45 cm
�+ 0.03923e
-3
0.028603e-3
0.026298e-3
� 2.6525 2.6525 2.6525
Tabla 4: Características de los tres modelos para la válvula #2.
Punto de operación 25 cm 35 cm 45 cm
�+ 0.035284e
-3
0.030834e-3
0.030107e-3
� 2.6525 2.6525 2.6525
Aplicando transformada de Laplace se obtiene:
�24 �"� 2�"� � �5�"� (13)

María Anaya Pérez, Victor Benitez Baltazar
8
entonces la ecuación (12) se puede plantear de la siguiente forma:
Con la ecuación (14) se expresa matemáticamente, la respuesta dinámica en el tiempo de la válvula para cada punto
de operación.
Es importante mencionar que este procedimiento se llevó acabo en simulación, una fase posterior deberá de
considerar el experimento real para obtener los parámetros de nuestro sistema particular.
4.2.3 Aproximación Lineal del Modelo
Con la finalidad de obtener la aproximación lineal del modelo representado con las ecuaciones (9), se lleva a cabo la
expansión en series de Taylor, obteniendo:
(4��"� � −2��
2&'/(�8(��"� −
/(�8&'
2��"� 32�8/(�8
2&'
(15)
(4��"� �2��
2&'/(�8(��"�
/(�8&'
2��"� −2�:
2&'/(�:(��"� −
/(�:&'
2��"�
donde,
w01 y w02 representan las aperturas de las válvulas #1 y #2 respectivamente en el punto de operación, y
h01 y h02 representan los niveles de líquido en los tanques #1 y #2 respectivamente, en el punto de operación.
Finalmente utilizando las ecuaciones (14) y (15), el modelo lineal para el Sistema de Planta Industrial de dos tanques
queda expresado de la siguiente forma :
(4��"� � −2��
2&'/(�8(��"� −
/(�8&'
2��"� 32�8/(�8
2&'
(16)
24 ��"� ��+��
5��"� −1�2��"�
(17)
(4��"� �2��
2&'/(�8(��"�
/(�8&'
2��"� −2�:
2&'/(�:(��"� −
/(�:&'
2��"� (18)
24 ��"� ��+��
5��"� −1�2��"�
(19)
en donde �+� y �+� son ganancias estáticas de las válvulas#1 y #2 en el punto de operación.
5. Simulación del Modelo lineal La etapa de simulación del modelo es muy importante ya que en base a los resultados que de esta se obtengan
podremos confirmar que nuestro modelo propuesto es representativo o no del sistema en estudio. A continuación se
presenta la información sobre esta parte de la metodología aplicada.
5.1 Adecuación del modelo matemático lineal
Tomando en cuenta los valores que la literatura nos presenta, (Maldonado, 1999), para Ke y T de acuerdo a los
puntos de operación presentados en las Tablas 3 y 4, se trabaja con el modelo representado por el grupo de las cuatro
ecuaciones de (16) a (19), llevando a cabo las sustituciones presentadas en la Tabla 5 con la finalidad de facilitar la
elaboración del diagrama de bloques.
Tabla 5: Sustituciones en ecuaciones (16) a (19)
Ecuación Sustituciones Nueva representación de ecuación
(16) �� �
;<8
�=>/?<8,�� �
/?<8
=>, �@ �
@;<8/?<8�=>
(4��"� � −��(��"� − ��2��"� �@
(17) A� � �+� �⁄ , B� � 1 �⁄ 24 ��"� � A�5��"� − B�2��"�
24 �"� ��+�5�"� −
1�2�"�
(14)

María Anaya Pérez, Victor Benitez Baltazar
9
(18)
�′� � ��, �′� � ��
�D �;<:
�=>/?<:, �E �
/?<:=>
(4��"� � �′�(��"� �′�2��"� − �D(��"� − �E2��"�
(19) A� � �+� �⁄ , B� � 1 �⁄ 24 ��"� � A�5��"� − B�2��"� 5.2 Diagrama de bloques para la simulación en SIMULINK Con la conexión adecuada de los diagramas de bloques que representan cada una de las funciones de las ecuaciones
de la (16) a (19), se obtiene el diagrama completo mostrado en la Figura 5.
Figura 5: Diagrama en Matlab-SIMULIK para la simulación con los dos tanques y dos válvulas,
en un punto de operación deseado.
6. Resultados A continuación se dan a conocer los resultados obtenidos al llevar a cabo la simulación. Estos resultados son
presentados a través de gráficos que muestran el comportamiento del factor de apertura de la válvula con respecto al
tiempo, para cada punto de operación en cada tanque.
6.1 Tanque 1-Válvula 1, punto de operación 25 cm
Las condiciones iniciales utilizadas en la obtención de la grafica mostrada en la Figura 6 fueron:
Figura 6: Gráfica representando el comportamiento de la razón de apertura respecto al tiempo,
para el tanque #1 y válvula #1.
6.2 Tanque 2-Válvula 2, punto de operación 25 cm Las condiciones iniciales utilizadas en la obtención de la grafica mostrada en la Figura 7 son:
Variable Valor
w1 0.00021
h1 25 cm
Ke1 0.03923e-3
v1 6 volts
T 2.6525 s
Step 5
María Anaya Pérez, Victor Benitez Baltazar
10
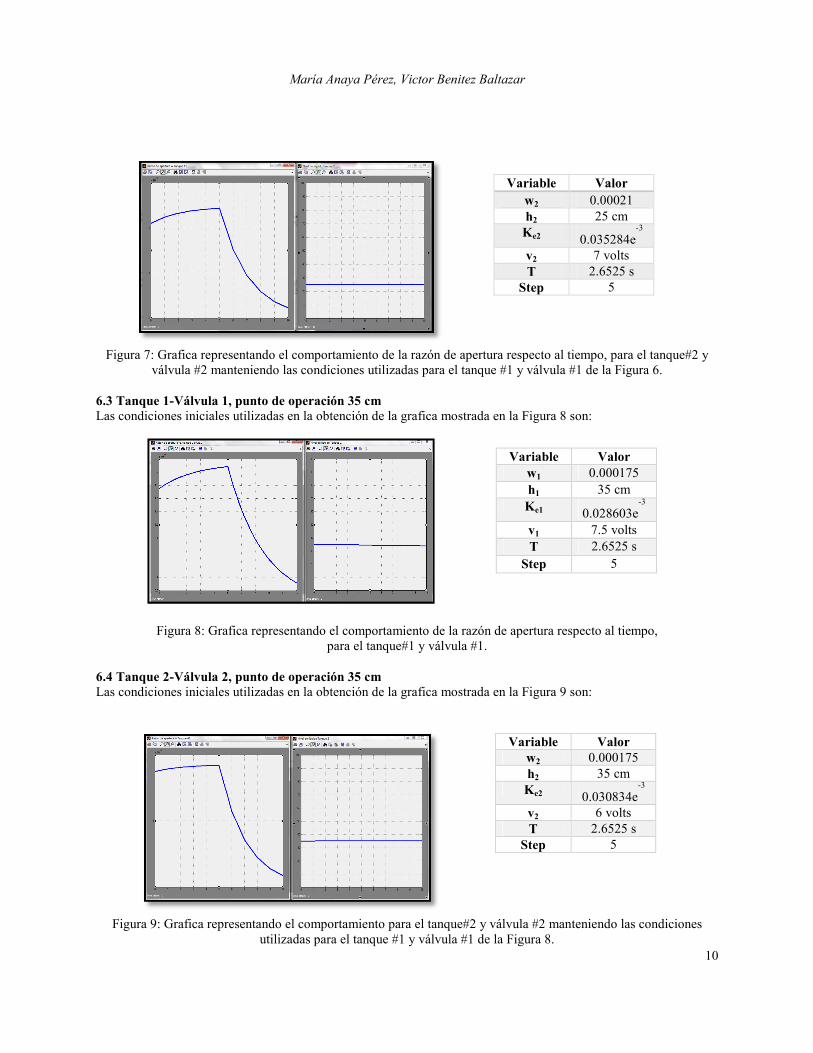
Figura 7: Grafica representando el comportamiento de la razón de apertura respecto al tiempo, para el tanque#2 y
válvula #2 manteniendo las condiciones utilizadas para el tanque #1 y válvula #1 de la Figura 6.
6.3 Tanque 1-Válvula 1, punto de operación 35 cm
Las condiciones iniciales utilizadas en la obtención de la grafica mostrada en la Figura 8 son:
Figura 8: Grafica representando el comportamiento de la razón de apertura respecto al tiempo,
para el tanque#1 y válvula #1.
6.4 Tanque 2-Válvula 2, punto de operación 35 cm
Las condiciones iniciales utilizadas en la obtención de la grafica mostrada en la Figura 9 son:
Figura 9: Grafica representando el comportamiento para el tanque#2 y válvula #2 manteniendo las condiciones
utilizadas para el tanque #1 y válvula #1 de la Figura 8.
Variable Valor
w2 0.00021
h2 25 cm
Ke2 0.035284e-3
v2 7 volts
T 2.6525 s
Step 5
Variable Valor
w1 0.000175
h1 35 cm
Ke1 0.028603e-3
v1 7.5 volts
T 2.6525 s
Step 5
Variable Valor
w2 0.000175
h2 35 cm
Ke2 0.030834e-3
v2 6 volts
T 2.6525 s
Step 5
María Anaya Pérez, Victor Benitez Baltazar
11
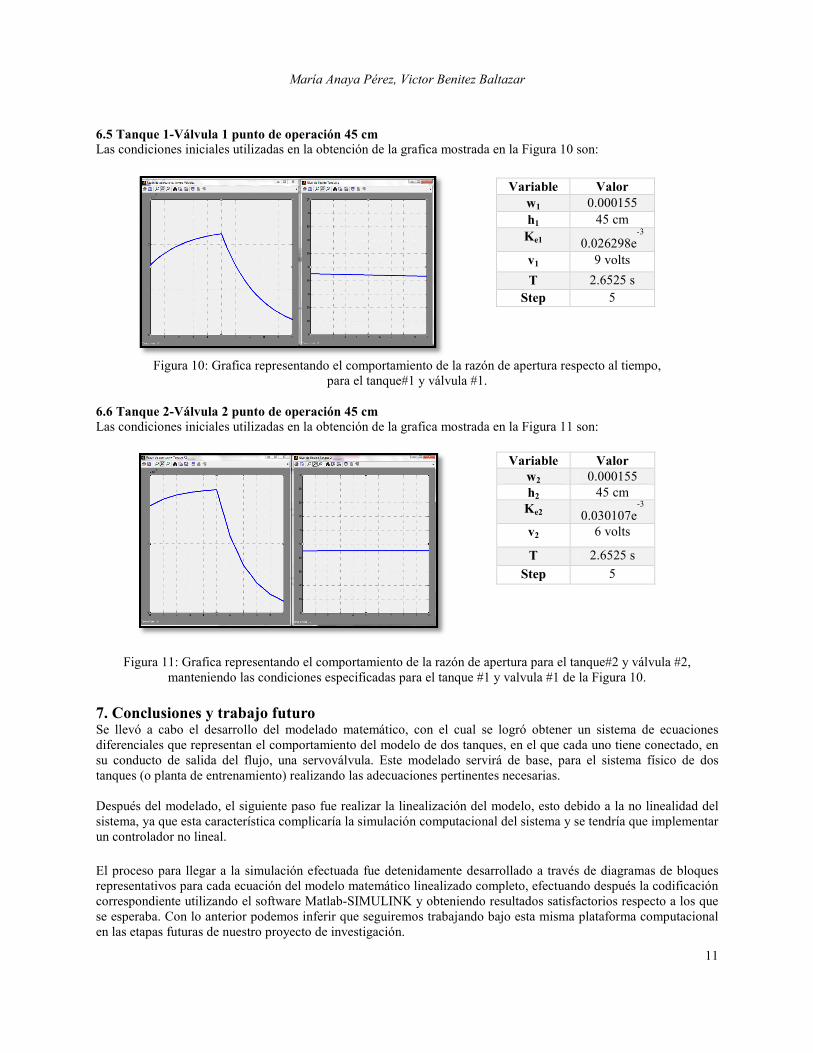
6.5 Tanque 1-Válvula 1 punto de operación 45 cm Las condiciones iniciales utilizadas en la obtención de la grafica mostrada en la Figura 10 son:
Figura 10: Grafica representando el comportamiento de la razón de apertura respecto al tiempo,
para el tanque#1 y válvula #1.
6.6 Tanque 2-Válvula 2 punto de operación 45 cm
Las condiciones iniciales utilizadas en la obtención de la grafica mostrada en la Figura 11 son:
Figura 11: Grafica representando el comportamiento de la razón de apertura para el tanque#2 y válvula #2,
manteniendo las condiciones especificadas para el tanque #1 y valvula #1 de la Figura 10.
7. Conclusiones y trabajo futuro Se llevó a cabo el desarrollo del modelado matemático, con el cual se logró obtener un sistema de ecuaciones
diferenciales que representan el comportamiento del modelo de dos tanques, en el que cada uno tiene conectado, en
su conducto de salida del flujo, una servoválvula. Este modelado servirá de base, para el sistema físico de dos
tanques (o planta de entrenamiento) realizando las adecuaciones pertinentes necesarias.
Después del modelado, el siguiente paso fue realizar la linealización del modelo, esto debido a la no linealidad del
sistema, ya que esta característica complicaría la simulación computacional del sistema y se tendría que implementar
un controlador no lineal.
El proceso para llegar a la simulación efectuada fue detenidamente desarrollado a través de diagramas de bloques
representativos para cada ecuación del modelo matemático linealizado completo, efectuando después la codificación
correspondiente utilizando el software Matlab-SIMULINK y obteniendo resultados satisfactorios respecto a los que
se esperaba. Con lo anterior podemos inferir que seguiremos trabajando bajo esta misma plataforma computacional
en las etapas futuras de nuestro proyecto de investigación.
Variable Valor
w1 0.000155
h1 45 cm
Ke1 0.026298e-3
v1 9 volts
T 2.6525 s
Step 5
Variable Valor
w2 0.000155
h2 45 cm
Ke2 0.030107e-3
v2 6 volts
T 2.6525 s
Step 5

María Anaya Pérez, Victor Benitez Baltazar
12
En la siguiente etapa del desarrollo de este proyecto de investigación, se realizará la parte experimental en la cual,
una vez que se obtengan algunos datos con la instrumentación pertinente, se aplicarán reglas de sintonización, las
cuales están basadas en metodologías experimentales para el diseño de un adecuado controlador a implementarse en
el sistema de dos tanques en estudio, evaluando el comportamiento en tiempo real con el teórico mostrado en este
trabajo.
Referencias
Barrietos, A.; Sanz, R.; Matía, F. y Gamboa, E. (1996). Control de Sistemas Continuos. España: Editorial McGraw-
Hill.
Lara, G. y Rocha, J. (2012). Error en estado estacionario. Nuevo León, México: Facultad de Ingeniería Mecánica y
Eléctrica, Universidad Autónoma de Nuevo León. Obtenido a través de internet:
http://es.scribd.com/doc/106182575/06-Error-en-Estado-Estable-o-Estacionario, (25/04/2013).
Maldonado, C. (1999). Seguimiento de trayectoria utilizando control difuso tipo Takagi-Sugeno. Tesis de Maestro
en Ciencias no publicada, CINVESTAV del IPN, Guadalajara, México.
Ogata, K. (1980). Ingeniería de Control Moderna. España: Editorial PHH-Prentice Hall.
Ogata, K. (2003). Ingeniería de Control Moderna. España: Editorial Pearson-Prentice Hall.
Ollero de Castro, P. y Fernández, E., (2006). Control e instrumentación de procesos químicos. España: Editorial
Síntesis, S.A.
Smith, C.A. y Corripio, A.B. (2008). Control Automático de Procesos Teoría y Práctica. México: Editorial Limusa.
Vázquez, I. (2013). Instrumentación y Control. Obtenido a través de internet:
http://www.inele.ufro.cl/apuntes/Instrumentacion_y_Control/Ivan_Velazquez/Catedra/Capitulo%205.%20Elemento
s%20finales%20de%20Control.pdf , (01/04/2013).