Mme t6 ultima_version
50
Mecánica de Máquinas y Estructuras
-
Upload
juanma-navarro-estupina -
Category
Education
-
view
88 -
download
0
Transcript of Mme t6 ultima_version

Mecánica de Máquinas y Estructuras

TEMA 6. CINÉTICA DE CUERPOS RÍGIDOS
Objetivo
Ser capaces de calcular los esfuerzos necesarios para conseguir el movimiento deseado en los elementos de una máquina. q
Ser capaces de calcular las solicitaciones en los componentes en movimiento de máquinas.
Tema 6. Cinética de Cuerpos Rígidos 3/XXMecánica de Máquinas y Estructuras
q
Tema 6 Cinética de cuerpos rígidosTema 6. Cinética de cuerpos rígidos
6.1 Movimiento plano de cuerpos rígidos6. Movimiento plano de cuerpos rígidos• Cantidad de movimiento angular• Principio de d’Alembert
M i i t l t i id• Movimiento plano restringido6.2 Movimiento 3D de cuerpos rígidos
• Cantidad de movimiento angular 3DCantidad de movimiento angular 3D• Movimiento general 3D. Ecuaciones de Euler.
Principio de d’AlembertM i i t 3D t i id• Movimiento 3D restringido
Tema 6. Cinética de Cuerpos Rígidos 4/XXMecánica de Máquinas y Estructuras

Tema 6 Cinética de cuerpos rígidosTema 6. Cinética de cuerpos rígidos
6.1 Movimiento plano de cuerpos rígidos6.1 Movimiento plano de cuerpos rígidos6. Movimiento plano de cuerpos rígidos• Cantidad de movimiento angular• Principio de d’Alembert
M i i t l t i id• Movimiento plano restringido6.2 Movimiento 3D de cuerpos rígidos
• Cantidad de movimiento angular 3DCantidad de movimiento angular 3D• Movimiento general 3D. Ecuaciones de Euler.
Principio de d’AlembertM i i t 3D t i id• Movimiento 3D restringido
Tema 6. Cinética de Cuerpos Rígidos 5/XXMecánica de Máquinas y Estructuras
6.1 Movimiento plano de cuerpos rígidos
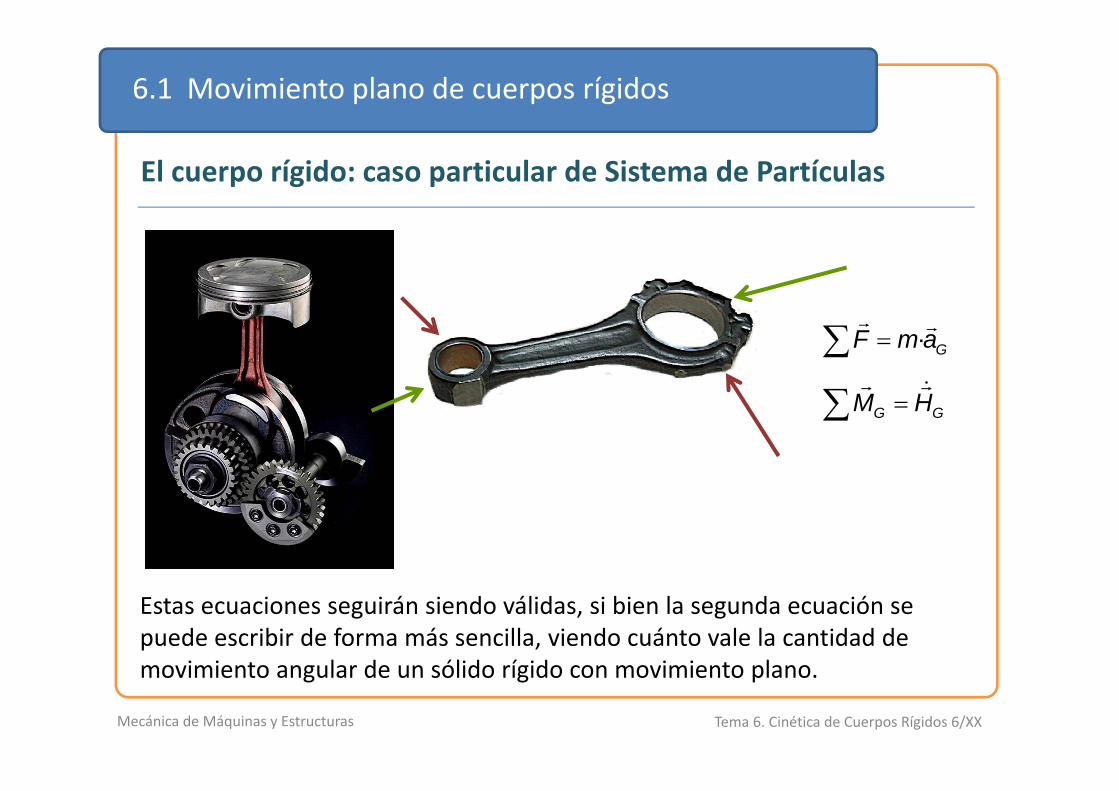
El cuerpo rígido: caso particular de Sistema de Partículas
· GF m a
M H
G GM H
Estas ecuaciones seguirán siendo válidas, si bien la segunda ecuación se puede escribir de forma más sencilla, viendo cuánto vale la cantidad de
i i t l d ólid í id i i t l
Tema 6. Cinética de Cuerpos Rígidos 6/XXMecánica de Máquinas y Estructuras
movimiento angular de un sólido rígido con movimiento plano.

6.1 Movimiento plano de cuerpos rígidos
Cantidad de movimiento angular HG
ri miZ
z
1
· ·n
G i i ii Gi V
H r m v H r v dm
i
x
yG
Y
2 2
X
2 2· · · · · ·GV V V V
H r v dm r r dm r dm r dm
·G GH I
Tema 6. Cinética de Cuerpos Rígidos 7/XXMecánica de Máquinas y Estructuras

6.1 Movimiento plano de cuerpos rígidos
Cantidad de movimiento angular HG
·G GH I
G G
Diferenciando llegamos a la ecuación de equilibrio dinámico de momentos:Diferenciando llegamos a la ecuación de equilibrio dinámico de momentos:
· ·G G G GH I H I
·G GH I
Tema 6. Cinética de Cuerpos Rígidos 8/XXMecánica de Máquinas y Estructuras
6.1 Movimiento plano de cuerpos rígidos
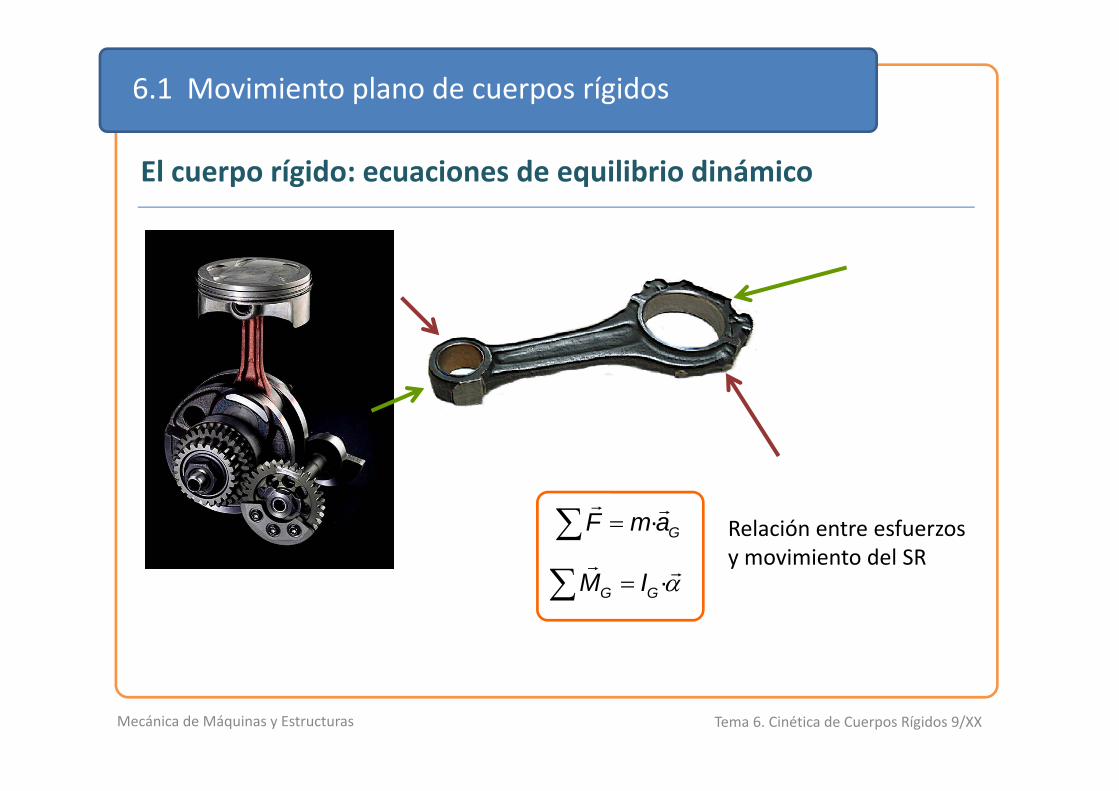
El cuerpo rígido: ecuaciones de equilibrio dinámico
· GF m a
M I
Relación entre esfuerzos y movimiento del SR
·G GM I
Tema 6. Cinética de Cuerpos Rígidos 9/XXMecánica de Máquinas y Estructuras
6.1 Movimiento plano de cuerpos rígidos
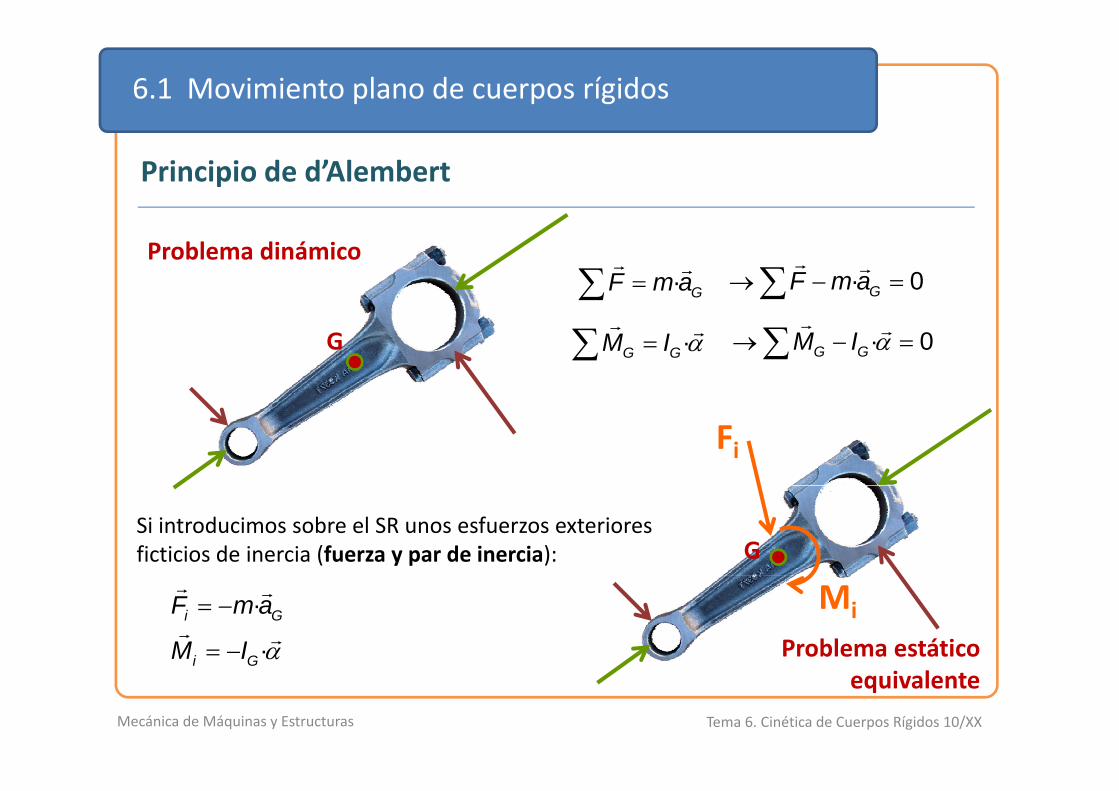
Principio de d’Alembert
· GF m a Problema dinámico
· 0GF m a
G · 0G GM I
·G GM I
Fi
GSi introducimos sobre el SR unos esfuerzos exteriores ficticios de inercia (fuerza y par de inercia):
Problema estático
·i GF m a
·i GM I
Mi
Tema 6. Cinética de Cuerpos Rígidos 10/XXMecánica de Máquinas y Estructuras
equivalentei G
6.1 Movimiento plano de cuerpos rígidos
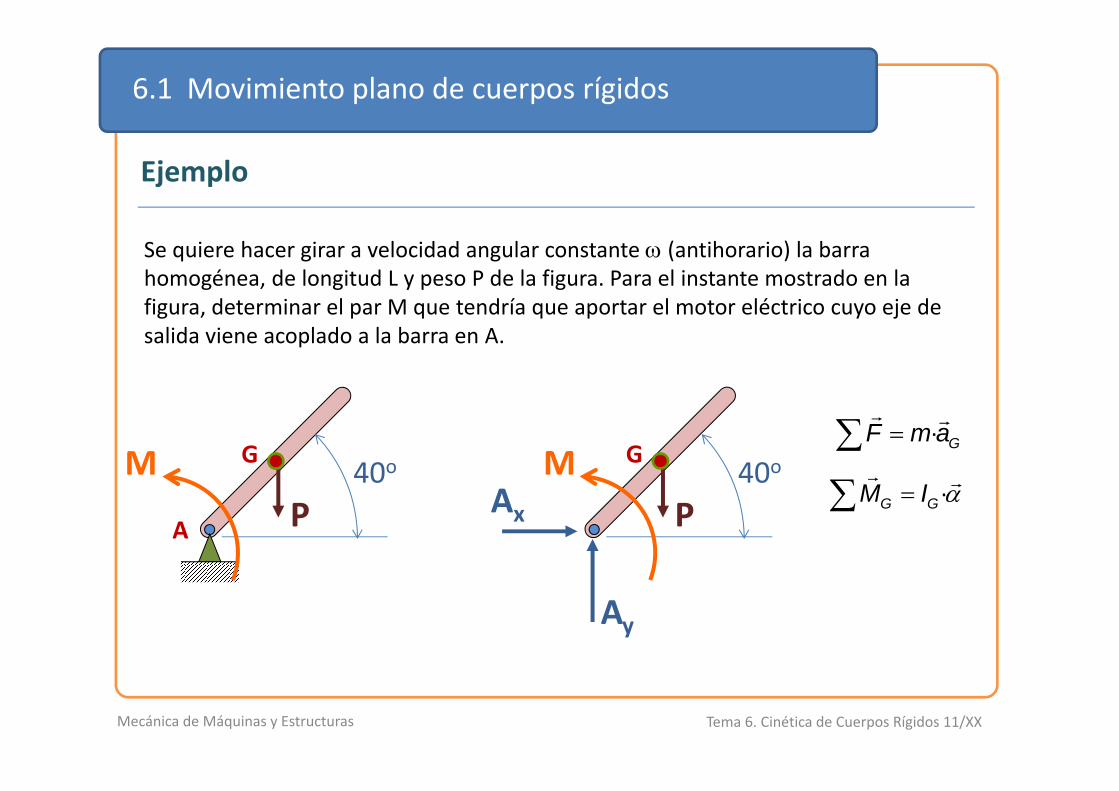
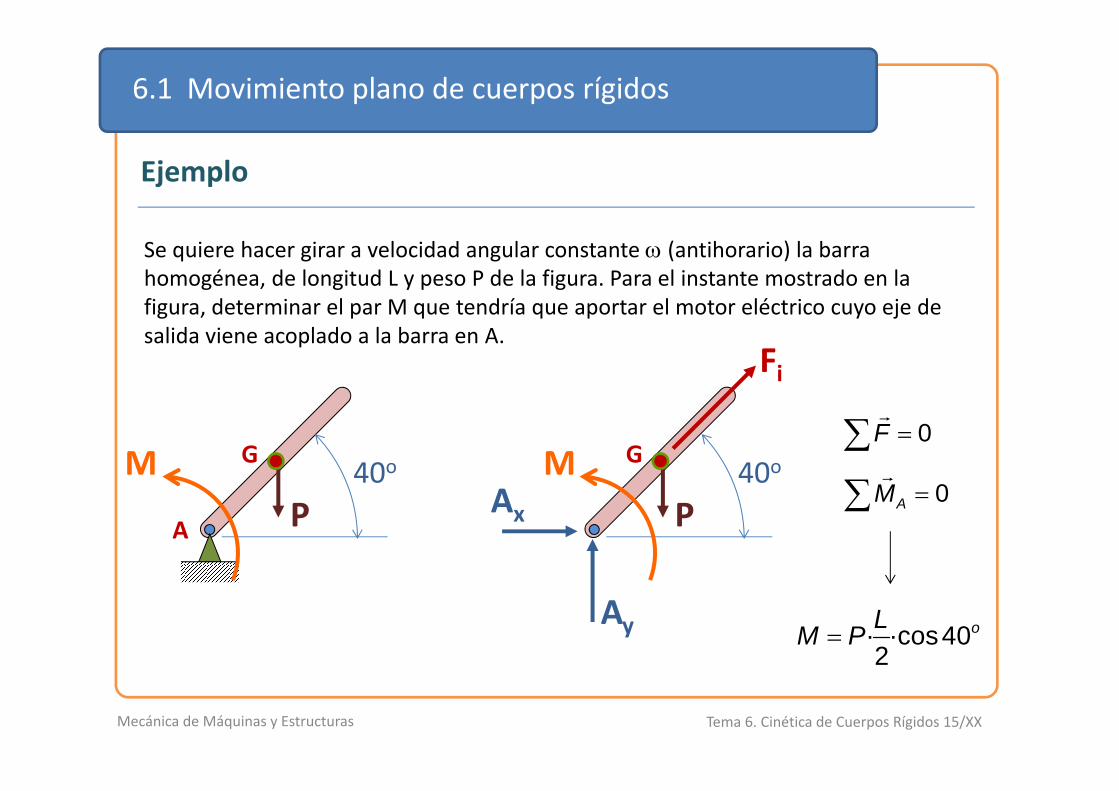
Ejemplo
Se quiere hacer girar a velocidad angular constante (antihorario) la barra homogénea, de longitud L y peso P de la figura. Para el instante mostrado en la figura determinar el par M que tendría que aportar el motor eléctrico cuyo eje defigura, determinar el par M que tendría que aportar el motor eléctrico cuyo eje de salida viene acoplado a la barra en A.
G40oM G
40oM· GF m a
M I
PA PAx·G GM I
Ay
Tema 6. Cinética de Cuerpos Rígidos 11/XXMecánica de Máquinas y Estructuras

6.1 Movimiento plano de cuerpos rígidos
Ejemplo
Se quiere hacer girar a velocidad angular constante (antihorario) la barra homogénea, de longitud L y peso P de la figura. Para el instante mostrado en la figura, determinar el par M que tendría que aportar el motor eléctrico cuyo eje de salida viene acoplado a la barra en A.
·· x GxA m a
F m a
G40oM
··G
y Gy
F m aA P m a
·G GM I
PAx · ·sin40 · ·cos40 ·2 2
G G
o ox y G
L LA A M I
Ay 2 2
0
· · · cos40 sin40o oG
cteLa AG AG i j
Cinemática
Tema 6. Cinética de Cuerpos Rígidos 12/XXMecánica de Máquinas y Estructuras
cos40 sin402Ga AG AG i j

6.1 Movimiento plano de cuerpos rígidos
Ejemplo
Se quiere hacer girar a velocidad angular constante (antihorario) la barra homogénea, de longitud L y peso P de la figura. Para el instante mostrado en la figura, determinar el par M que tendría que aportar el motor eléctrico cuyo eje de salida viene acoplado a la barra en A.
2P L2
2 2
· · · ·cos402
· · · ·sin40 · · ·sin40
ox Gx
o o
P LA m ag
P L P LA P m a A P
sin40 sin402 2
· ·sin40 · ·cos40 · 02 2
y Gy y
o ox y G
A P m a A Pg g
L LA A M I
2 2
2 2
· · ·cos40 · ·sin40 · · ·sin40 · ·cos40 · ·cos402 2 2 2 2
o o o o oP L L P L L LM P Pg g
Tema 6. Cinética de Cuerpos Rígidos 13/XXMecánica de Máquinas y Estructuras

6.1 Movimiento plano de cuerpos rígidos
Ejemplo
Se quiere hacer girar a velocidad angular constante (antihorario) la barra homogénea, de longitud L y peso P de la figura. Para el instante mostrado en la figura determinar el par M que tendría que aportar el motor eléctrico cuyo eje defigura, determinar el par M que tendría que aportar el motor eléctrico cuyo eje de salida viene acoplado a la barra en A.
Resolución alternativa D’Alembert
G40oM 2· . · · cos40 sin40
2o o
i GLF m a m i j
Resolución alternativa. D’Alembert
PA
2i G j
· 0i GM I
Tema 6. Cinética de Cuerpos Rígidos 14/XXMecánica de Máquinas y Estructuras
6.1 Movimiento plano de cuerpos rígidos
Ejemplo
Se quiere hacer girar a velocidad angular constante (antihorario) la barra homogénea, de longitud L y peso P de la figura. Para el instante mostrado en la figura determinar el par M que tendría que aportar el motor eléctrico cuyo eje defigura, determinar el par M que tendría que aportar el motor eléctrico cuyo eje de salida viene acoplado a la barra en A.
Fi
G40oM G
40oM0F
0M
P PAAx
0AM
Ay · ·cos402
oLM P
Tema 6. Cinética de Cuerpos Rígidos 15/XXMecánica de Máquinas y Estructuras

6.1 Movimiento plano de cuerpos rígidos
Sistemas de cuerpos rígidos
· GF m a
·G GM I
· GF m a
G G
· GF m a
·G GM I
·G GM I
Todo lo visto es aplicable a sistemas compuestos por varios SR en movimiento (máquinas). Para ello es necesario trabajar con el DSL de cada SR li d d ll l i d ilib i di á i
Tema 6. Cinética de Cuerpos Rígidos 16/XXMecánica de Máquinas y Estructuras
SR, y aplicar para cada uno de ellos las ecuaciones de equilibrio dinámico.
6.1 Movimiento plano de cuerpos rígidos
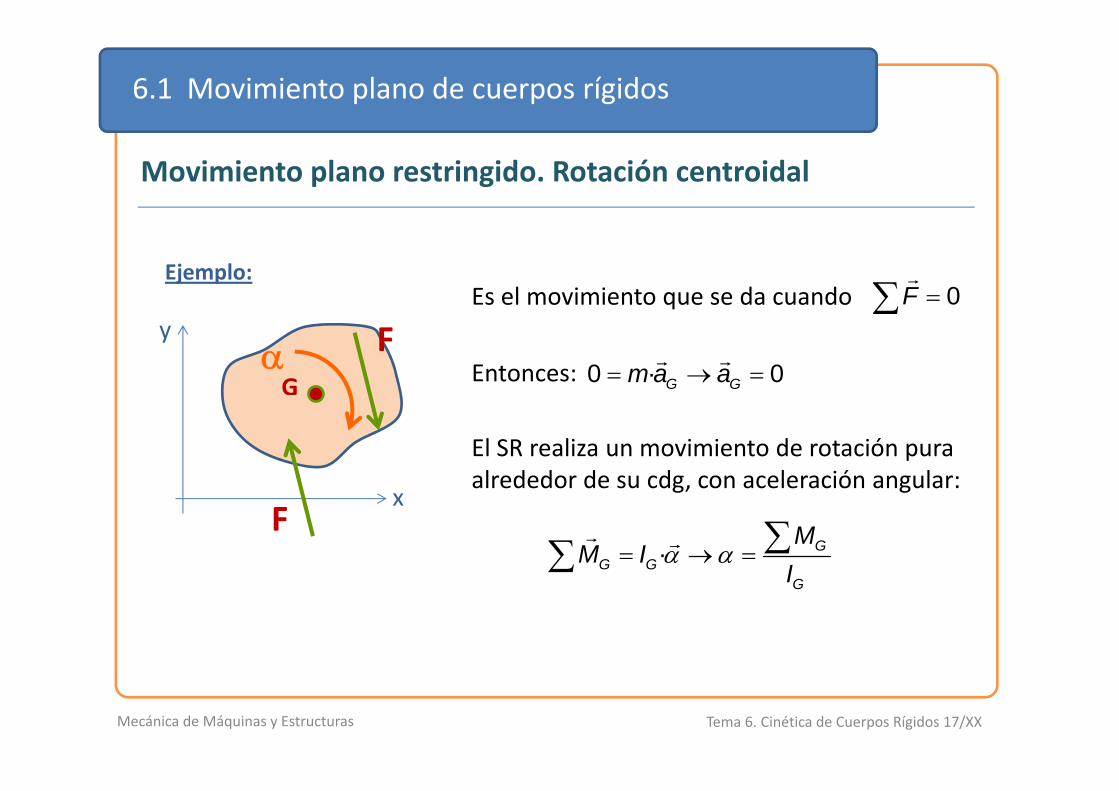
Movimiento plano restringido. Rotación centroidal
Ejemplo:Es el movimiento que se da cuando 0F
G
y Fq
Entonces:
0 · 0G Gm a a
El SR realiza un movimiento de rotación pura alrededor de su cdg, con aceleración angular:
xF
· GG G
MM I
I
alrededor de su cdg, con aceleración angular:
GI
Tema 6. Cinética de Cuerpos Rígidos 17/XXMecánica de Máquinas y Estructuras
6.1 Movimiento plano de cuerpos rígidos
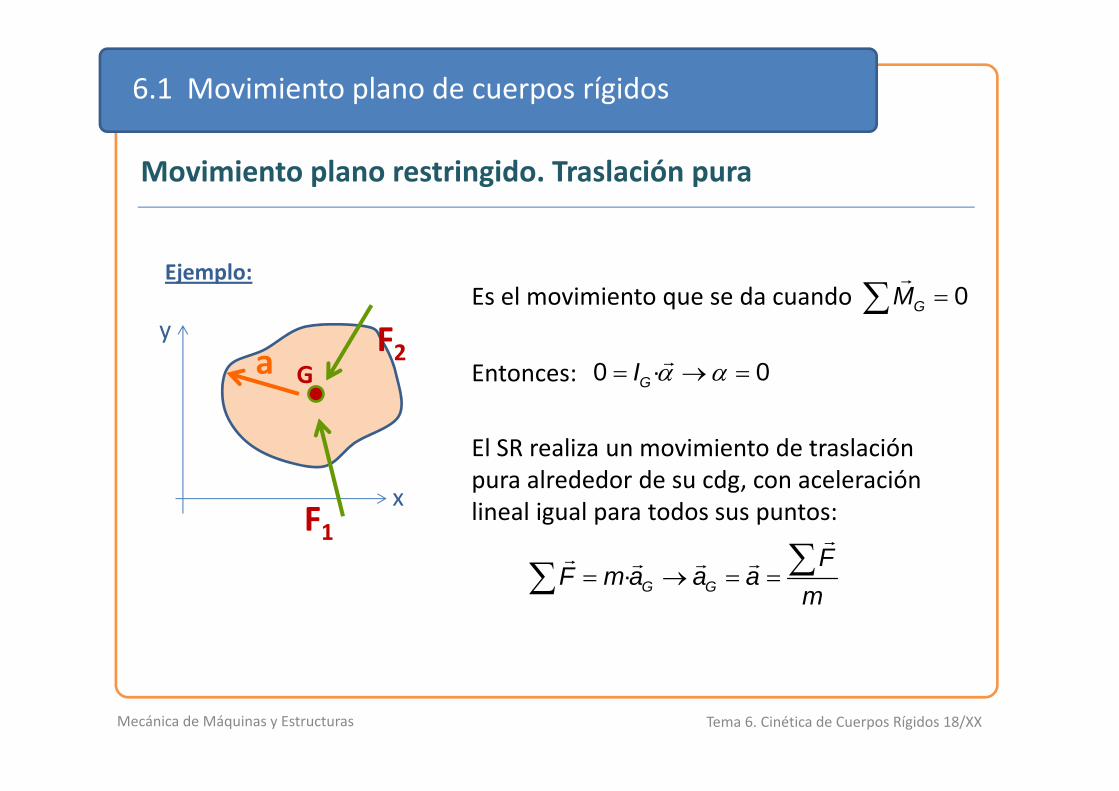
Movimiento plano restringido. Traslación pura
Ejemplo:Es el movimiento que se da cuando 0GM
G
y F2q
Entonces:
G
0 · 0GI a
El SR realiza un movimiento de traslación pura alrededor de su cdg, con aceleración
xF1
·F
F m a a a
pura alrededor de su cdg, con aceleración lineal igual para todos sus puntos:
· G GF m a a am
Tema 6. Cinética de Cuerpos Rígidos 18/XXMecánica de Máquinas y Estructuras
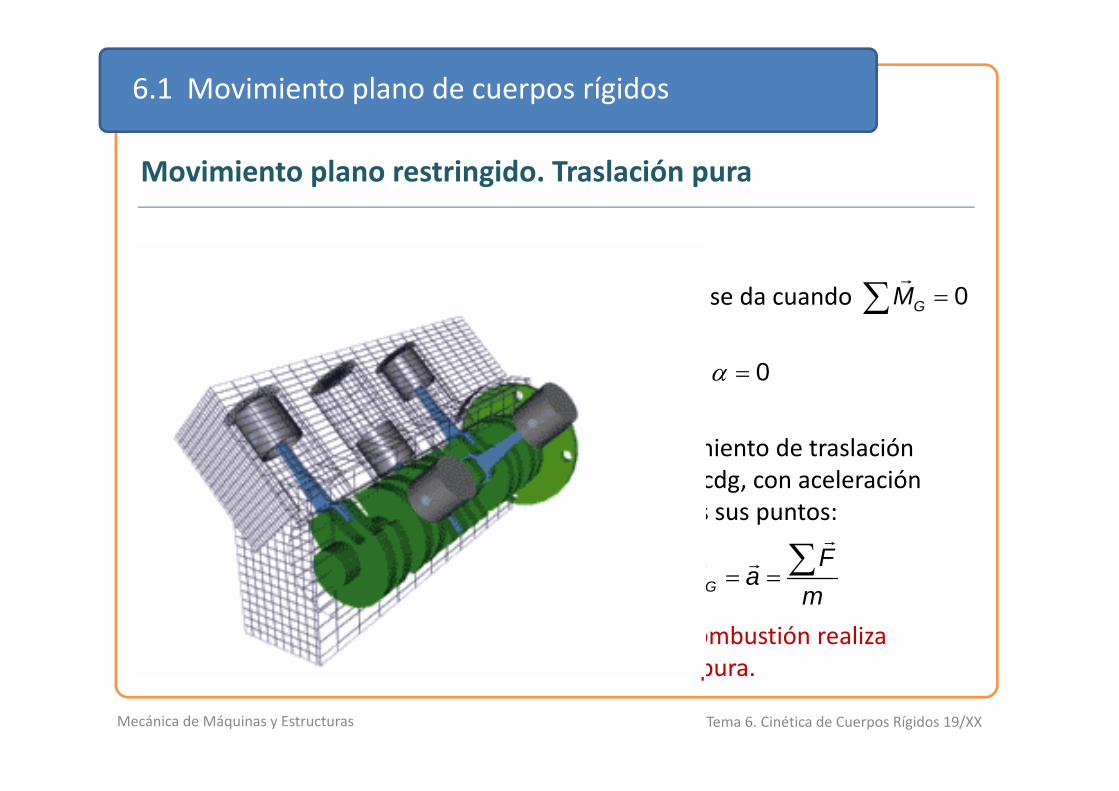
6.1 Movimiento plano de cuerpos rígidos
Movimiento plano restringido. Traslación pura
Ejemplo:Es el movimiento que se da cuando 0GM
G
y F2q
Entonces:
G
0 · 0GI a
El SR realiza un movimiento de traslación pura alrededor de su cdg, con aceleración
xF1
·F
F m a a a
pura alrededor de su cdg, con aceleración lineal igual para todos sus puntos:
· G GF m a a am
El pistón en el motor de combustión realiza movimiento de traslación pura
Tema 6. Cinética de Cuerpos Rígidos 19/XXMecánica de Máquinas y Estructuras
movimiento de traslación pura.

6.1 Movimiento plano de cuerpos rígidos
Movimiento plano restringido. Rotación no centroidal
Es el movimiento que se da cuando el SR gira en torno a un punto O diferente a su cdg. y
F2Ejemplo:
Entonces: 2· · ·j GF m a m OG OG
G
y
O El momento de los esfuerzos externos sobre O:
xF1
El momento de los esfuerzos externos sobre O:
O j j j jM OP F OG GP F j j j j GOG F GP F OG F M
·O OM I
2
2 2
· · ·
· · · · ·
O G
G G
M OG m OG OG I
mOG I I mOG
Tema 6. Cinética de Cuerpos Rígidos 20/XXMecánica de Máquinas y Estructuras
O OM I G GmOG I I mOG

6.1 Movimiento plano de cuerpos rígidos
Movimiento plano restringido. Rotación no centroidal
Se pueden usar de forma alternativa las ecuaciones:y
F2Ejemplo:
· GF m a
G
y
O· GF m a
·G GM I
xF1
·O OM I
Cuidado, esto sólo se puede realizar cuando O t fij d l SR!!es un punto fijo del SR!!
Tema 6. Cinética de Cuerpos Rígidos 21/XXMecánica de Máquinas y Estructuras

6.1 Movimiento plano de cuerpos rígidos
Movimiento plano restringido. Rotación no centroidal
Se pueden usar de forma alternativa las ecuaciones:y
F2Ejemplo:
· GF m a
G
y
O· GF m a
·G GM I
xF1
·O OM I
Cuidado, esto sólo se puede realizar cuando O t fij d l SR!!es un punto fijo del SR!!
El cigüeñal en el motor de combustión realiza movimiento de rotación no centroidal
Tema 6. Cinética de Cuerpos Rígidos 22/XXMecánica de Máquinas y Estructuras
movimiento de rotación no centroidal.
6.1 Movimiento plano de cuerpos rígidos
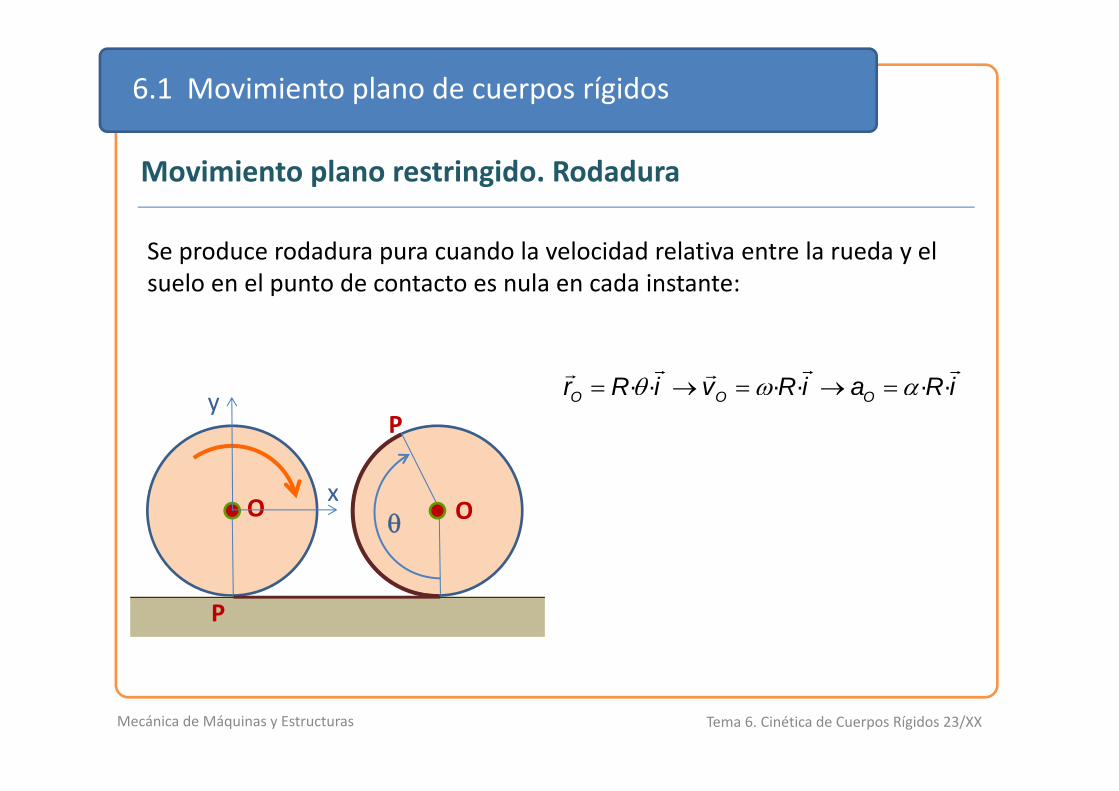
Movimiento plano restringido. Rodadura
Se produce rodadura pura cuando la velocidad relativa entre la rueda y el suelo en el punto de contacto es nula en cada instante:
· · · · · ·O O Or R i v R i a R i
O O O
Py
O Ox
P
Tema 6. Cinética de Cuerpos Rígidos 23/XXMecánica de Máquinas y Estructuras
6.1 Movimiento plano de cuerpos rígidos
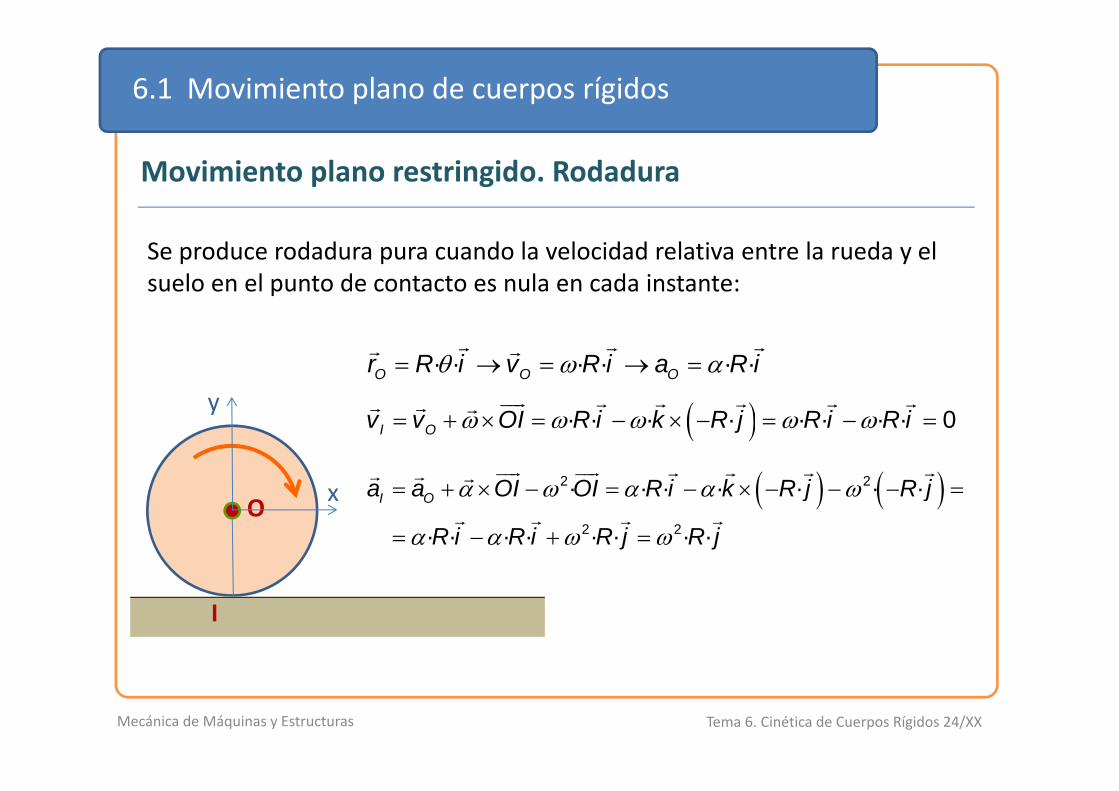
Movimiento plano restringido. Rodadura
Se produce rodadura pura cuando la velocidad relativa entre la rueda y el suelo en el punto de contacto es nula en cada instante:
· · · · · ·O O Or R i v R i a R i
y · · · · · · · · 0I Ov v OI R i k R j R i R i
2 2a a OI OI R i k R j R j
O x 2 2
2 2
· · · · · · ·
· · · · · · · ·
I Oa a OI OI R i k R j R j
R i R i R j R j
I
Tema 6. Cinética de Cuerpos Rígidos 24/XXMecánica de Máquinas y Estructuras

6.1 Movimiento plano de cuerpos rígidos
Movimiento plano restringido. Rodadura
Se produce rodadura pura cuando la velocidad relativa entre la rueda y el suelo en el punto de contacto es nula en cada instante:
··
G
G
v ra r
La fuerza de rozamiento es desconocida en principio; es usual suponer que no hay deslizamiento y entonces:
· · ·
· 0x Gx
y Gy
F m a m r NF m a
F
·RF N
G · RG G
FM I
Si se cumple que , entonces la suposición es
N
R
FRSi se cumple que , entonces la suposición es correcta y el problema acaba.
En caso contrario, se produce deslizamiento.
Tema 6. Cinética de Cuerpos Rígidos 25/XXMecánica de Máquinas y Estructuras
N En caso contrario, se produce deslizamiento.

6.1 Movimiento plano de cuerpos rígidos
Movimiento plano restringido. Rodadura
En caso de haber concluido que existe rodadura con deslizamiento:
·v r La fuerza de rozamiento es conocida en dicho caso:·
G
G
v ra r
·
·0
x Gx
R k
NF m aF N
F
La fuerza de rozamiento es conocida en dicho caso:
· 0
·
R ky Gy
Gx
G G
F m aa
M I
F
G
NFR
Tema 6. Cinética de Cuerpos Rígidos 26/XXMecánica de Máquinas y Estructuras
N

Tema 6 Cinética de cuerpos rígidosTema 6. Cinética de cuerpos rígidos
6.1 Movimiento plano de cuerpos rígidos6. Movimiento plano de cuerpos rígidos• Cantidad de movimiento angular• Principio de d’Alembert
M i i t l t i id• Movimiento plano restringido6.2 Movimiento 3D de cuerpos rígidos
• Cantidad de movimiento angular 3D6.2 Movimiento 3D de cuerpos rígidos
Cantidad de movimiento angular 3D• Movimiento general 3D. Ecuaciones de Euler.
Principio de d’AlembertM i i t 3D t i id• Movimiento 3D restringido
Tema 6. Cinética de Cuerpos Rígidos 27/XXMecánica de Máquinas y Estructuras

6.2 Movimiento 3D de cuerpos rígidos
El cuerpo rígido: caso particular de Sistema de Partículas
· GF m a
G GM H
Estas ecuaciones seguirán siendo válidas. Veremos cómo calcular para un SR el momento angular necesario para la segunda ecuación.
Tema 6. Cinética de Cuerpos Rígidos 28/XXMecánica de Máquinas y Estructuras
6.2 Movimiento 3D de cuerpos rígidos
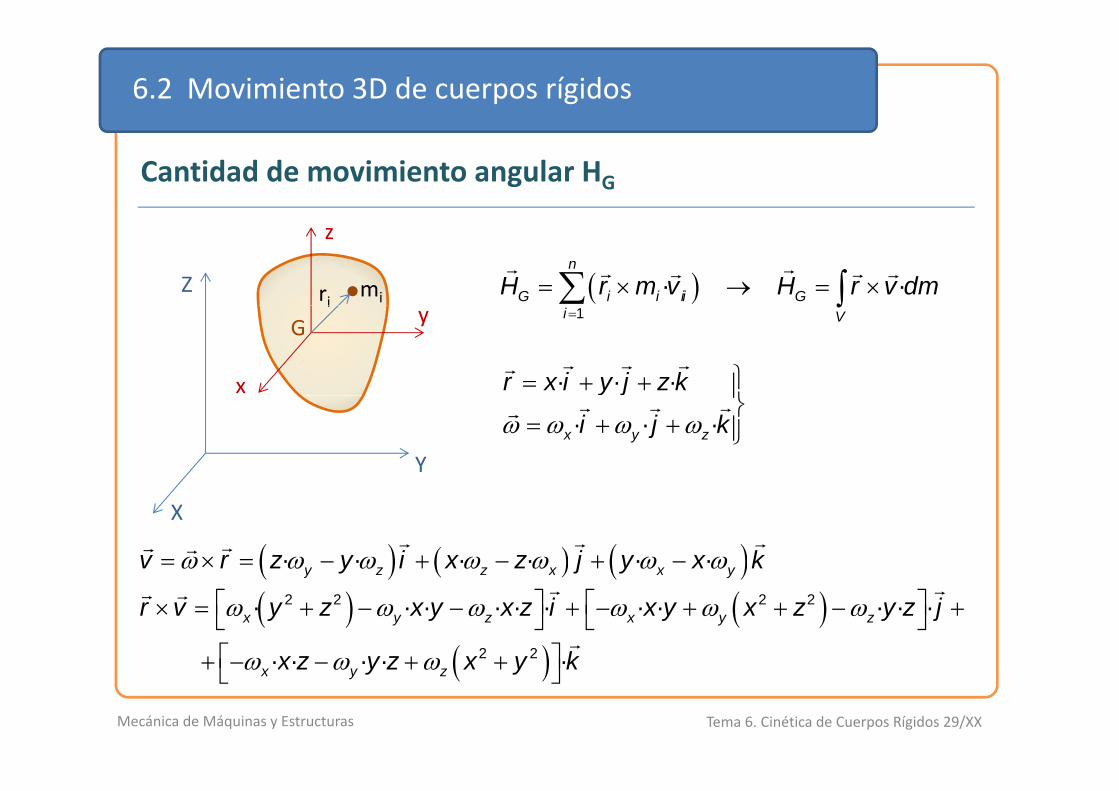
Cantidad de movimiento angular HG
· ·n
G i i ii GH r m v H r v dm
ri miZ
z
1i Vi
x
yG
· · ·r x i y j z k
Y
· · ·x y zi j k
X
· · · · · ·y z z x x yv r z y i x z j y x k y y
2 2 2 2
2 2
· · · · · · · · · · ·
· · · · ·
x y z x y zr v y z x y x z i x y x z y z j
x z y z x y k
Tema 6. Cinética de Cuerpos Rígidos 29/XXMecánica de Máquinas y Estructuras
x y zx z y z x y k

6.2 Movimiento 3D de cuerpos rígidos
Cantidad de movimiento angular HG
2 2· · · · · · · · · ·G x y zV V V V
H r v dm y z dm x y dm x z dm i
2 2· · · · · · · · ·x y zV V V
x y dm x z dm y z dm j
2 2· · · · · · · · ·x y zV V V
x z dm y z dm x y dm k
· · · ·
· · · ·
x Gx y Gxy z Gxz
x Gxy y Gy z Gyz
I I I i
I I I j
· · · ·y y y y
x Gxz y Gyz z GzI I I k
Tema 6. Cinética de Cuerpos Rígidos 30/XXMecánica de Máquinas y Estructuras
6.2 Movimiento 3D de cuerpos rígidos
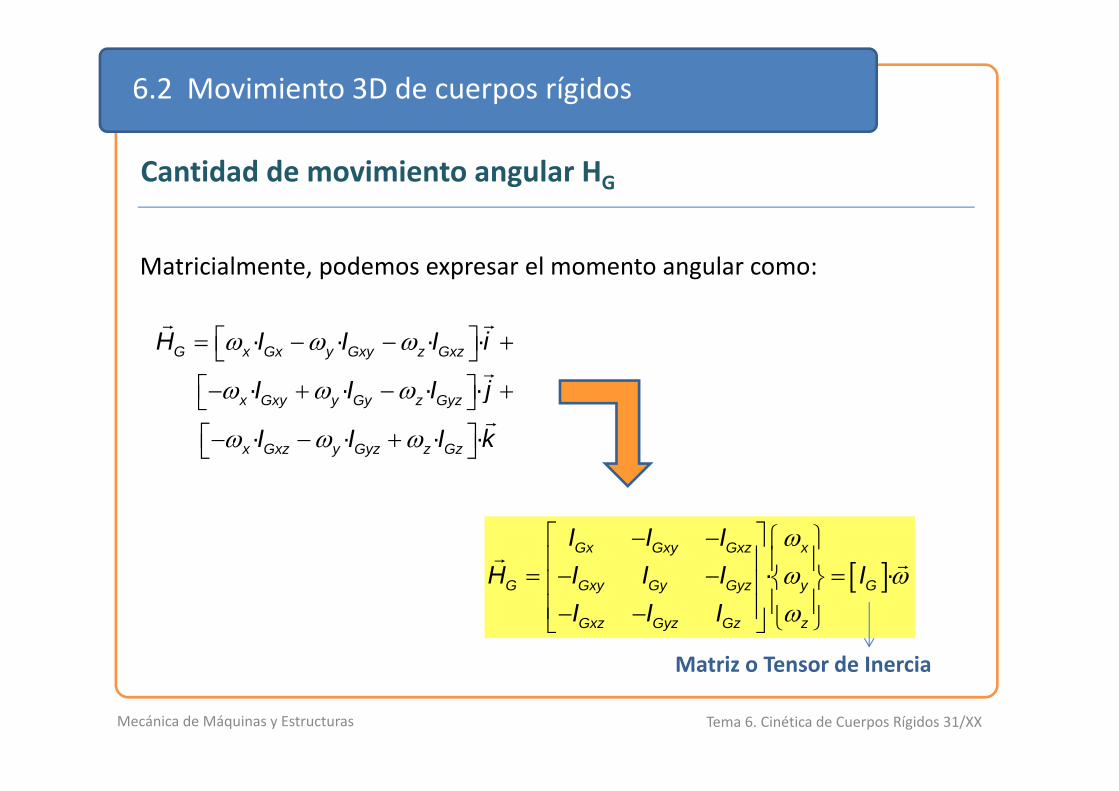
Cantidad de movimiento angular HG
Matricialmente, podemos expresar el momento angular como:
· · · ·
· · · ·G x Gx y Gxy z Gxz
G G G
H I I I i
I I I j
· · · ·x Gxy y Gy z Gyz
x Gxz y Gyz z Gz
I I I j
I I I k
· ·Gx Gxy Gxz xI I I
H I I I I
· ·G Gxy Gy Gyz y G
Gxz Gyz Gz z
H I I I II I I
Matriz o Tensor de Inercia
Tema 6. Cinética de Cuerpos Rígidos 31/XXMecánica de Máquinas y Estructuras
Matriz o Tensor de Inercia

6.2 Movimiento 3D de cuerpos rígidos
Movimiento general 3D
Ecuaciones de equilibrio dinámico: Sistema de 6 ecuaciones diferenciales
·i GF m a
M H
El cálculo de la derivada temporal del momento angular es compleja, ya que al moverse el SR con respecto a los ejes
iG GM H
compleja, ya que al moverse el SR con respecto a los ejes cambia la matriz [IG]
Z Z
XY Y
X
Tema 6. Cinética de Cuerpos Rígidos 32/XXMecánica de Máquinas y Estructuras
X X
6.2 Movimiento 3D de cuerpos rígidos
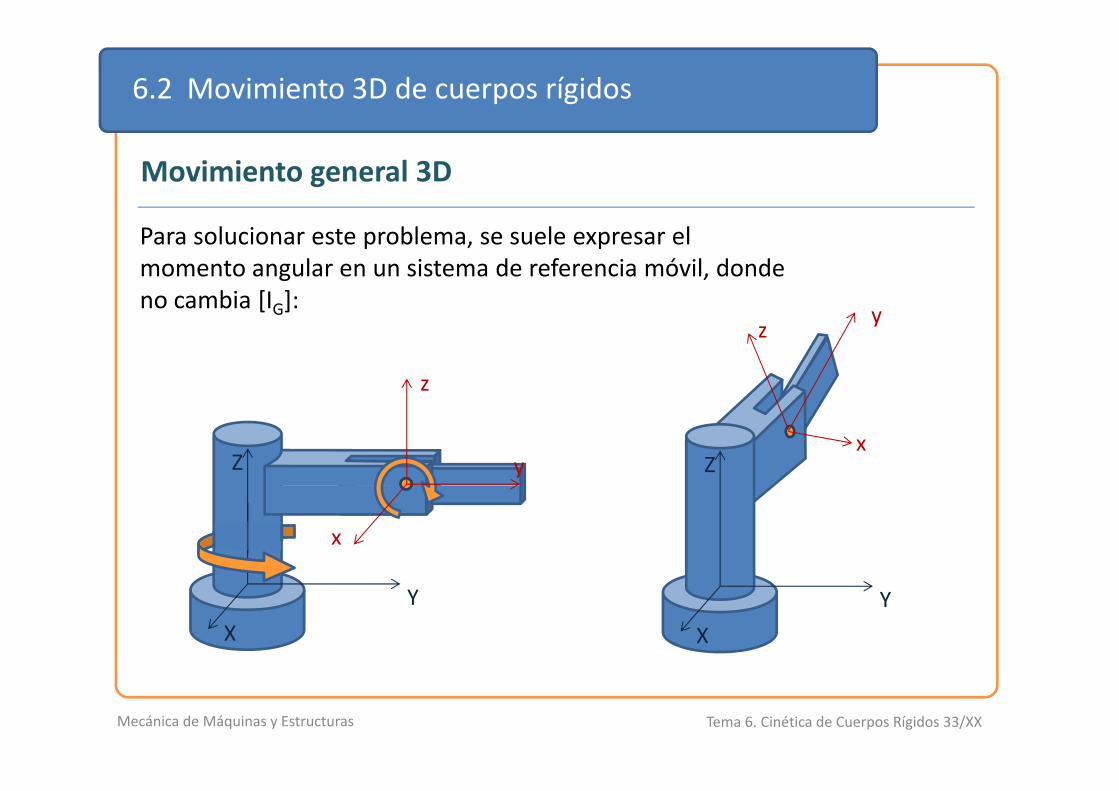
Movimiento general 3D
Para solucionar este problema, se suele expresar el momento angular en un sistema de referencia móvil, donde no cambia [IG]:no cambia [IG]:
z
yz
Z Zyx
x
XY Y
X
Tema 6. Cinética de Cuerpos Rígidos 33/XXMecánica de Máquinas y Estructuras

6.2 Movimiento 3D de cuerpos rígidos
Movimiento general 3D
En ese caso, si es la velocidad angular del SR y se consideran ejes solidarios con el SR:
x y zG G G G GH H i H j H k H
Tema 6. Cinética de Cuerpos Rígidos 34/XXMecánica de Máquinas y Estructuras

6.2 Movimiento 3D de cuerpos rígidos
Movimiento general 3D. Ecuaciones de Euler
Si además utilizamos ejes principales de inercia:
0 00 0 · · · · · · ·0 0
Gx x
G Gy y Gx x Gy y Gz z
IH I I i I j I k
I
0 0 Gz zI
· · · · · ·G Gx x Gy y Gz z GH I i I j I k H
· · · · · · · · ·G x y z Gx x Gy y Gz zH i j k I i I j I k
· · · · · · · · ·Gy Gz y z Gz Gx x z Gx Gy x yI I i I I j I I k
Tema 6. Cinética de Cuerpos Rígidos 35/XXMecánica de Máquinas y Estructuras

6.2 Movimiento 3D de cuerpos rígidos
Movimiento general 3D. Ecuaciones de Euler
Con todo ello, las ecuaciones de movimiento quedan en dicho caso:
M I I IF
Ecuaciones de Euler
· · ··
· , · · ·xx
y y
G Gx x Gy Gz y zx G
y G G Gy y Gz Gx x z
M I I IF m a
F m a M I I I
F
· · · ·
z zz G G Gz z Gx Gy x yF m a M I I I
Sólo válidas si se utilizan ejes móviles solidarios con el SR, y que sean principales de inercia
Tema 6. Cinética de Cuerpos Rígidos 36/XXMecánica de Máquinas y Estructuras
6.2 Movimiento 3D de cuerpos rígidos
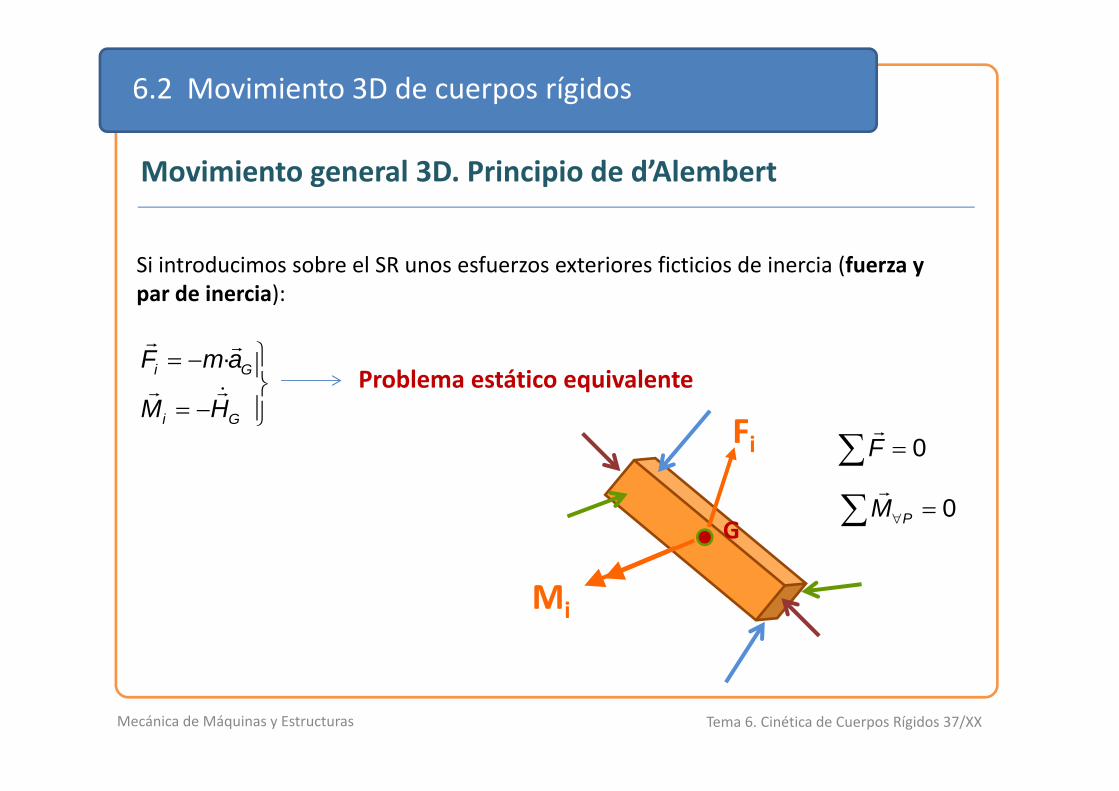
Movimiento general 3D. Principio de d’Alembert
Si introducimos sobre el SR unos esfuerzos exteriores ficticios de inercia (fuerza y par de inercia):
Problema estático equivalente·i GF m a
i GM H
0F Fi
0PM
G
Mi
Tema 6. Cinética de Cuerpos Rígidos 37/XXMecánica de Máquinas y Estructuras
6.2 Movimiento 3D de cuerpos rígidos
Movimiento 3D restringido. Punto fijo
En el caso en que el SR tiene movimiento alrededor de un punto fijo O:
·i G
O O
F m a
M H
Cuidado!! si O no es fijo, no es aplicable. Debemos considerar en ese caso la ecuación de momentos con respecto a su cdg
O OM H
·O OH I
Tema 6. Cinética de Cuerpos Rígidos 38/XXMecánica de Máquinas y Estructuras
6.2 Movimiento 3D de cuerpos rígidos
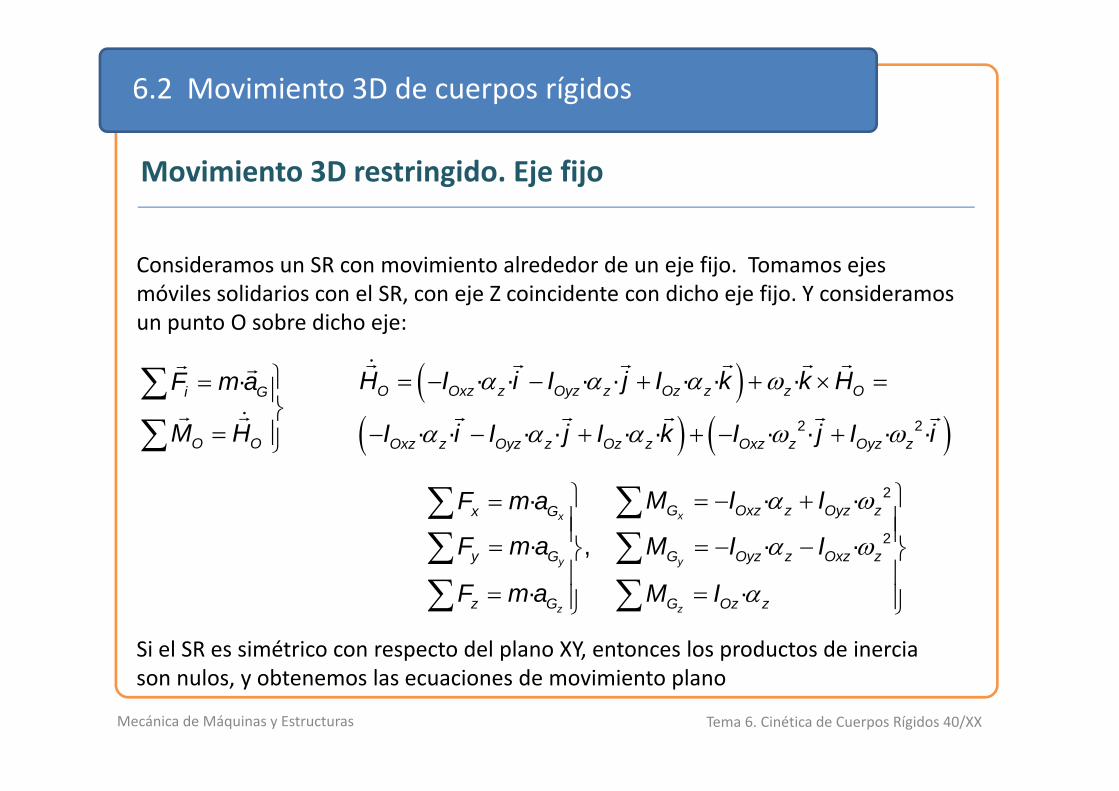
Movimiento 3D restringido. Eje fijo
Consideramos un SR con movimiento alrededor de un eje fijo. Tomamos ejes móviles solidarios con el SR, con eje Z coincidente con dicho eje fijo. Y consideramos un punto O sobre dicho eje:
0 ·Ox Oxy Oxz Oxz zI I I I
·i GF m a
· · 0 ··
y
O O Oxy Oy Oyz Oyz z
Oxz Oyz Oz z Oz z
H I I I I II I I I
i G
O OM H
2 2
· · · · · · ·O Oxz z Oyz z Oz z z OH I i I j I k k H
2 2· · · · · · · · · ·Oxz z Oyz z Oz z Oxz z Oyz zI i I j I k I j I i
Tema 6. Cinética de Cuerpos Rígidos 39/XXMecánica de Máquinas y Estructuras
6.2 Movimiento 3D de cuerpos rígidos
Movimiento 3D restringido. Eje fijo
Consideramos un SR con movimiento alrededor de un eje fijo. Tomamos ejes móviles solidarios con el SR, con eje Z coincidente con dicho eje fijo. Y consideramos
·i GF m a
· · · · · · ·O Oxz z Oyz z Oz z z OH I i I j I k k H
un punto O sobre dicho eje:
i G
O OM H
2 2· · · · · · · · · ·
O Oxz z Oyz z Oz z z O
Oxz z Oyz z Oz z Oxz z Oyz zI i I j I k I j I i
2
2
· ··
· , · ·xx
y y
G Oxz z Oyz zx G
y G G Oyz z Oxz z
M I IF m a
F m a M I I
· ·z zz G G Oz zF m a M I
Si el SR es simétrico con respecto del plano XY, entonces los productos de inercia
Tema 6. Cinética de Cuerpos Rígidos 40/XXMecánica de Máquinas y Estructuras
son nulos, y obtenemos las ecuaciones de movimiento plano
6.2 Movimiento 3D de cuerpos rígidos
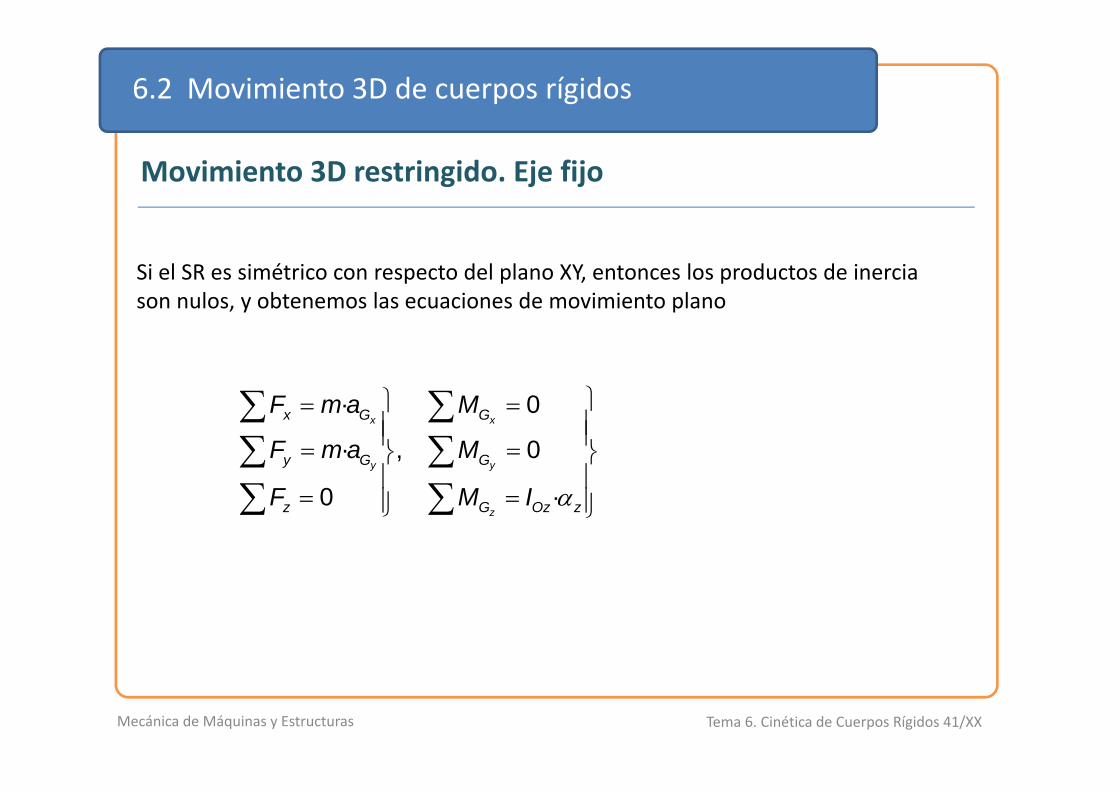
Movimiento 3D restringido. Eje fijo
Si el SR es simétrico con respecto del plano XY, entonces los productos de inercia son nulos, y obtenemos las ecuaciones de movimiento plano
0F M
son nulos, y obtenemos las ecuaciones de movimiento plano
· 0
· , 0x x
y y
x G G
y G G
F m a M
F m a M
0 ·
zz G Oz zF M I
Tema 6. Cinética de Cuerpos Rígidos 41/XXMecánica de Máquinas y Estructuras
6.2 Movimiento 3D de cuerpos rígidos
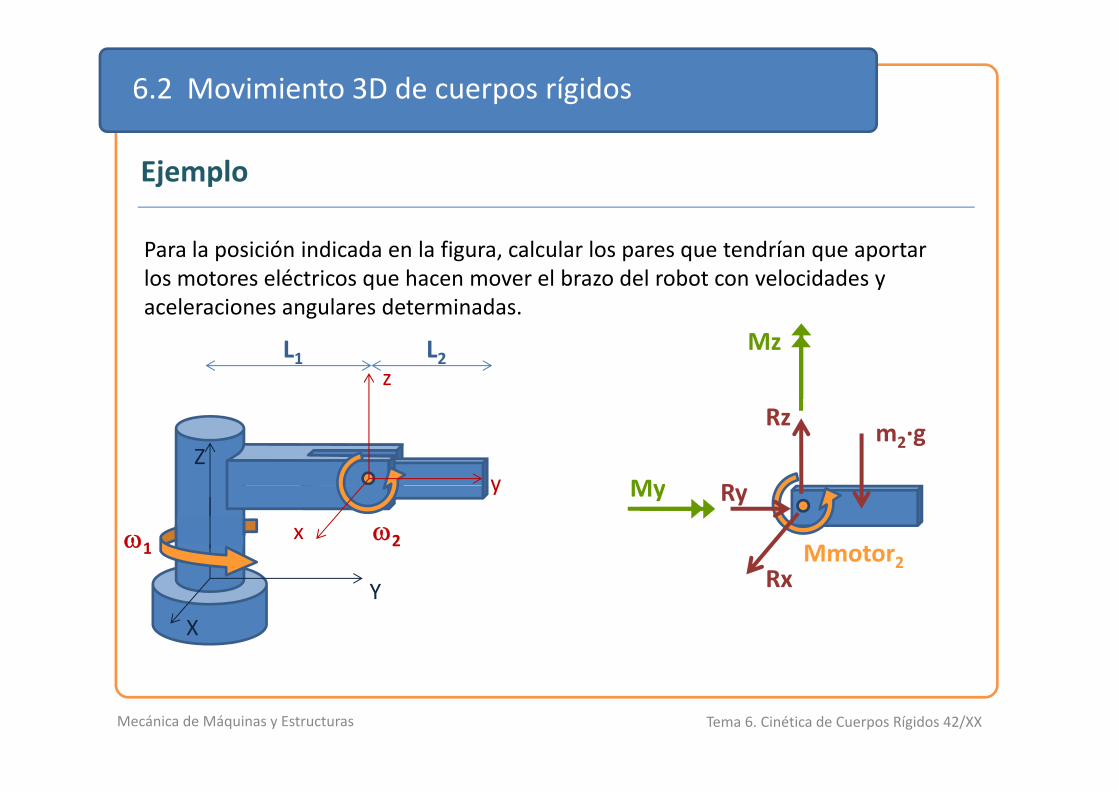
Ejemplo
Para la posición indicada en la figura, calcular los pares que tendrían que aportar los motores eléctricos que hacen mover el brazo del robot con velocidades y aceleraciones angulares determinadasaceleraciones angulares determinadas.
zMzL1 L2
Zy
Rz
RMy
m2∙g
x12
y Ry
Rx
My
Mmotor2
XY Rx
Tema 6. Cinética de Cuerpos Rígidos 42/XXMecánica de Máquinas y Estructuras

6.2 Movimiento 3D de cuerpos rígidos
Ejemplo
Para la posición indicada en la figura, calcular los pares que tendrían que aportar los motores eléctricos que hacen mover el brazo del robot con velocidades y aceleraciones angulares determinadasaceleraciones angulares determinadas.
zL1 L2
z 2
Zy
Zy
2
2
x12
y
x12
XY
cos sink j
XY
Tema 6. Cinética de Cuerpos Rígidos 43/XXMecánica de Máquinas y Estructuras
1 1 2 1 2·cos · ·sin ·k j

6.2 Movimiento 3D de cuerpos rígidos
Ejemplo
1 1 1 2 1 2·cos · ·sin ·SR k j
11
·cos · ·sin · ·sin · ·cos ·
SRSR
ddt
k j
1 2 1 2 2 1 2 1 2 2 1
1 1 2 1 2 1 1 1 2 1 2 1
·cos · ·sin · ·sin · ·cos ·
· · · · · · · · · · · ·
ejes SRk j
k j k i k k j j k
(l di ió d l l l bi )
2 2 1 2 1 2· ·cos · ·sin ·SR i k j
(la dirección de la vel. angular no cambia)
2 2 1 2 1 2
2 2 1 2 2 2 1 1 2 2 1 2 2
2 1 1 2
· · · · · · ·cos · · ·sin ·
· · · ·
SR
SR ejes
j
i k i i k j k
i k j
Tema 6. Cinética de Cuerpos Rígidos 44/XXMecánica de Máquinas y Estructuras
2 1 1 2 j
6.2 Movimiento 3D de cuerpos rígidos
Ejemplo
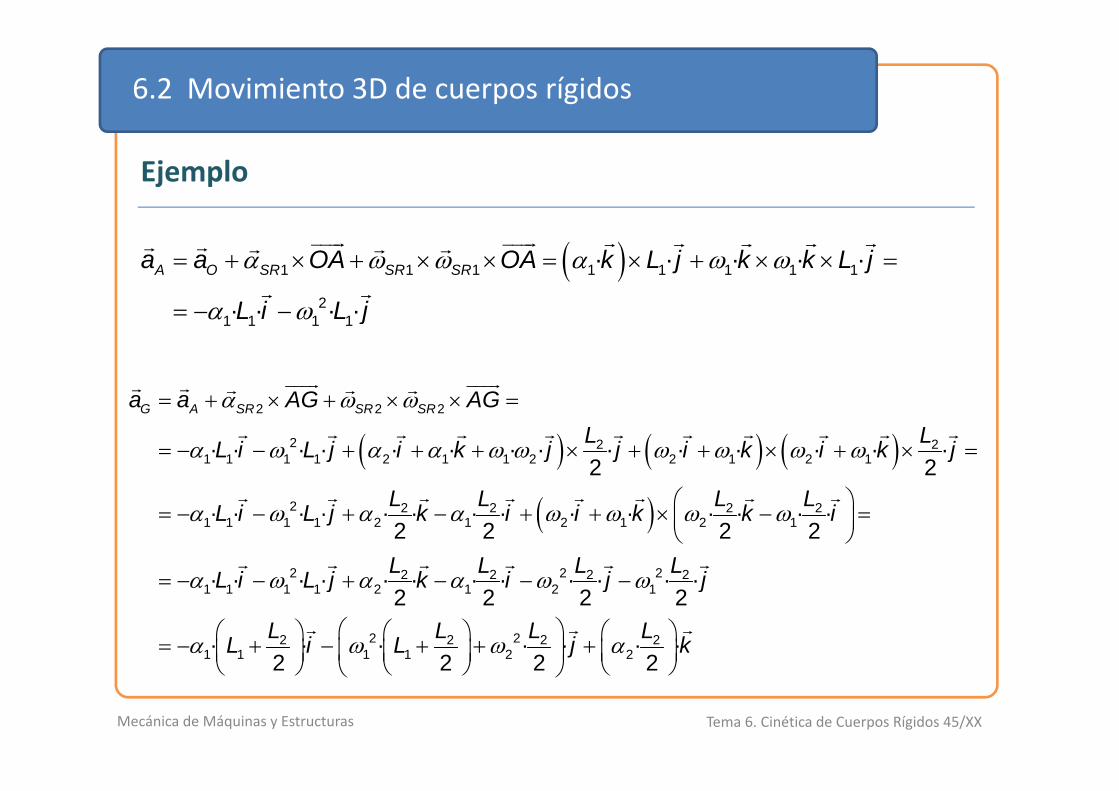
1 1 1 1 1 1 1 1
2
· · · · ·A O SR SR SRa a OA OA k L j k k L j
L i L j
2
1 1 1 1· · · ·L i L j
a a AG AG
2 2 2
2 2 21 1 1 1 2 1 1 2 2 1 2 1· · · · · · · · · · · · · ·
2 2
G A SR SR SRa a AG AGL LL i L j i k j j i k i k j
2 2 2 2 21 1 1 1 2 1 2 1 2 1· · · · · · · · · · · · · ·
2 2 2 2L L L LL i L j k i i k k i
2 2 22 2 2 2L L L LL i L j k i j j
2 2 22 2 2 21 1 1 1 2 1 2 1
2 22 2 2 21 1 1 1 2 2
· · · · · · · · · · · ·2 2 2 2
· · · · · · ·2 2 2 2
L i L j k i j j
L L L LL i L j k
Tema 6. Cinética de Cuerpos Rígidos 45/XXMecánica de Máquinas y Estructuras
2 2 2 2

6.2 Movimiento 3D de cuerpos rígidos
Ejemplo
20 00 0 sin sin cosGxI
H I I i I j I k
1 2 2 1 2 1 2
1 2
0 0 · ·sin · · · ·sin · · ·cos ·0 0 ·cos
G Gy Gx Gy Gz
Gz
H I I i I j I kI
2 1 2 1 2 2 1 2 1 2 2
2 1 2 1
· · · ·sin · ·cos · · ·cos · ·sin ·
· · · · · · ·G Gx Gy Gz ejes G
Gx Gy Gz ejes G
H I i I j I k H
I i I j I k H
2 1 2 1
2 1 2 1 2 1 2 1
2
· · · · · · · · · · · · ·
·
Gx Gy Gz ejes G
Gx Gy Gz Gx Gz
Gx
j
I i I j I k i k I i I k
I
1 2 1 1 2 1 2· · · · · · · · · · · ·Gy Gz Gz Gxi I j I k I j I j
2Gx
1 2 1 1 2 1 2
2 1 2 1· · · · · · ·Gy Gz Gz Gx
Gx Gx Gy Gz GzI i I I I j I k
Tema 6. Cinética de Cuerpos Rígidos 46/XXMecánica de Máquinas y Estructuras
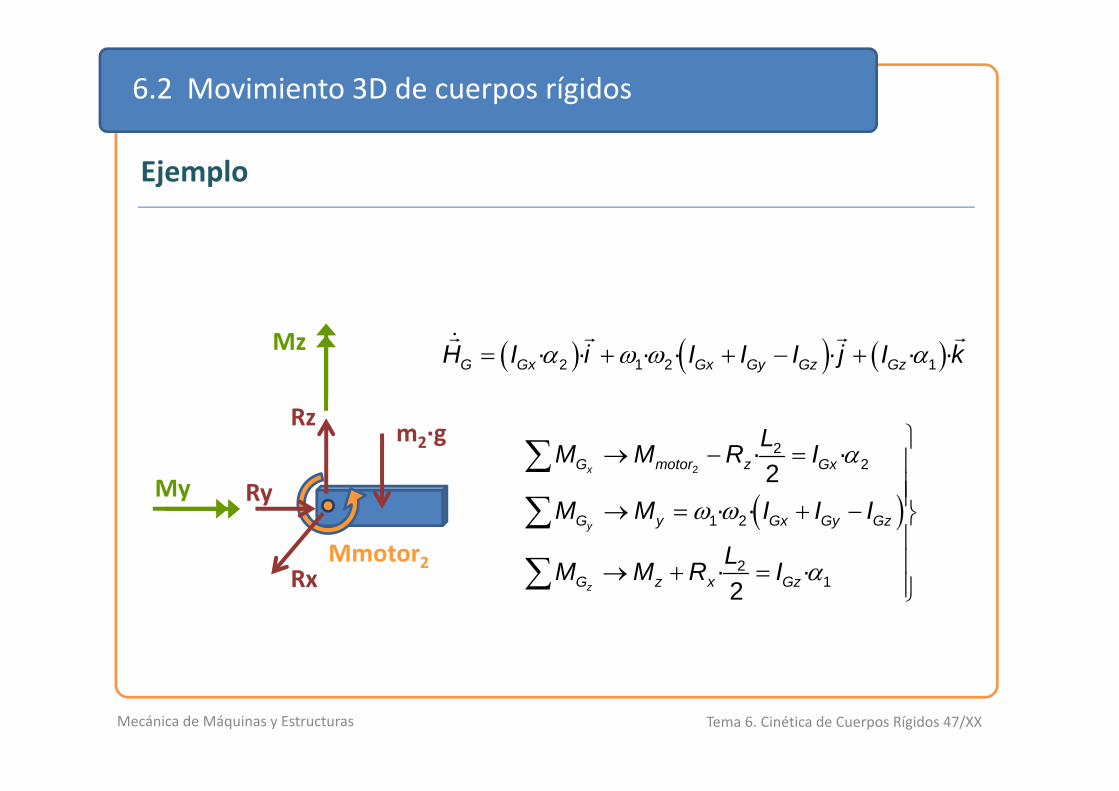
6.2 Movimiento 3D de cuerpos rígidos
Ejemplo
Mz 2 1 2 1· · · · · · ·G Gx Gx Gy Gz GzH I i I I I j I k
Rz
RMy2
22· ·
2xG motor z GxLM M R I
m2∙g
Ry
Rx
My
Mmotor2
1 2
2
· ·
· ·
yG y Gx Gy GzM M I I I
LM M R I
Rx 12zG z x GzM M R I
Tema 6. Cinética de Cuerpos Rígidos 47/XXMecánica de Máquinas y Estructuras

6.2 Movimiento 3D de cuerpos rígidos
Ejemplo
2 22 2 2 21 1 1 1 2 2· · · · · · ·
2 2 2 2GL L L La L i L j k
Mz
Rz
RMy
22 1 1· ·
2x xLF R m L
L L
m2∙g
Ry
Rx
My
Mmotor2
2 22 22 1 1 2
2
· · ·2 2y yL LF R m L
LF R
Rx 22 2 2· · ·
2z zLF R m g m
Tema 6. Cinética de Cuerpos Rígidos 48/XXMecánica de Máquinas y Estructuras

6.2 Movimiento 3D de cuerpos rígidos
Ejemplo
22 2· ·
2zLR m g
Mz2
2 22 2 2· · · ·
2 2motor GxL LM m g I
Rz
RMy
m2∙g
Ry
Rx
My
Mmotor2Rx
Tema 6. Cinética de Cuerpos Rígidos 49/XXMecánica de Máquinas y Estructuras

Mecánica de Máquinas y Estructuras