MECANISMO
24
Máquinas y mecanismos Trabajo 4
-
Upload
martha-isabel-pacheco-ruiz -
Category
Documents
-
view
31 -
download
0
Transcript of MECANISMO
Máquinas y mecanismosTrabajo 4

Introducción a los mecanismos y a la cinemática
Las máquinas son herramientas que utilizamos para modificar, transmitir y dirigir fuerzas para realizar
tareas específicas.
Un mecanismo es una parte mecánica de la máquina cuya función radica en transmitir el movimiento y la
fuerza de una fuente de potencia a una salida.

1.4 Terminología de mecanismosTenemos que un mecanismo consiste en partes
conectadas cuyo objetivo es transmitir el movimiento y fuerza, desde una fuente de poder hasta una salida.
Un eslabonamiento es un mecanismo donde se conectan partes rígidas para formar una cadena. Una de sus partes recibe el nombre de bancada, ya que sirve de marco de referencia para el movimiento de las demás partes

1.4 Terminología de mecanismosEslabones
Son las partes individuales del mecanismo, y para poder transmitir el movimiento se conectan con otros eslabones.
Las uniones principales entre ellos son: La unión de revoluta (unión de
perno o de bisagra)
Permiten la rotación pura entre los los dos eslabones que se conectan.
La unión de corredera (unión de pistón
o prismática)
Permite el deslizamiento lineal entre los eslabones que conecta.
1.4 Terminología de mecanismos
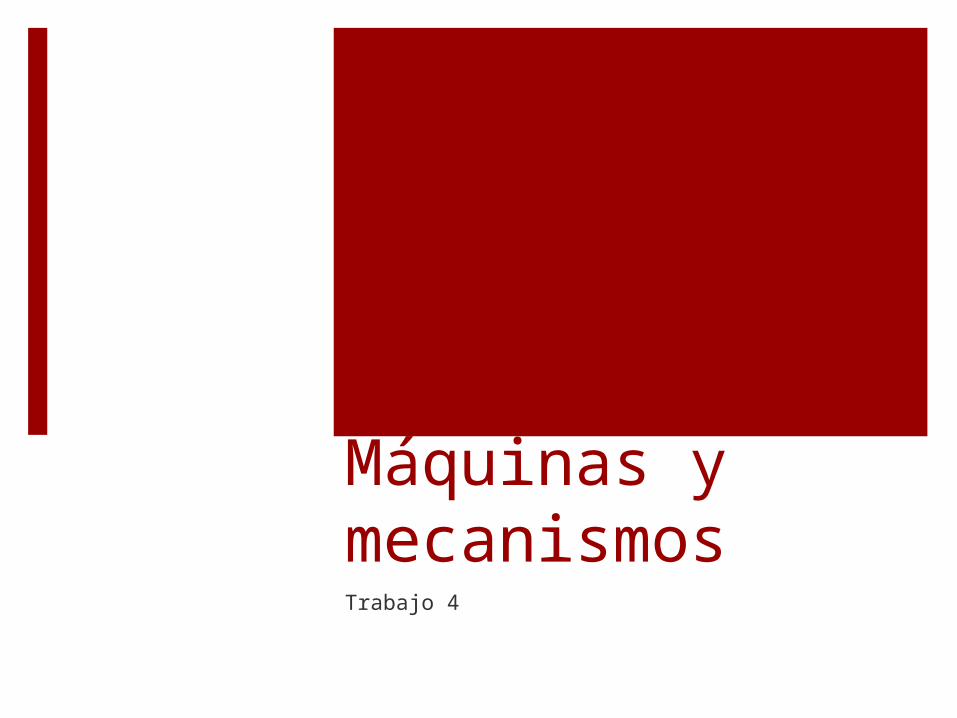
Uniones de orden superior
Unión de leva
Permite tanto la rotación como el desplazamiento entre los eslabones que conecta.
Unión de engrane
Permite asimismo la rotación y el deslizamiento entre los dos engranes conforme sus dientes se van acoplando.

1.4 Terminología de mecanismos
Eslabones simples
Es un cuerpo rígido que solo tienes dos uniones que se conectan con otros eslabones.
Ejemplos: Una manivela, un balancín.
*Representación cinemática:
Eslabones complejos
Es un cuerpo rígido que contiene más de dos uniones.
Ejemplos: Una manivela de campana.
*Representación cinemática:
1.4 Terminología de mecanismos
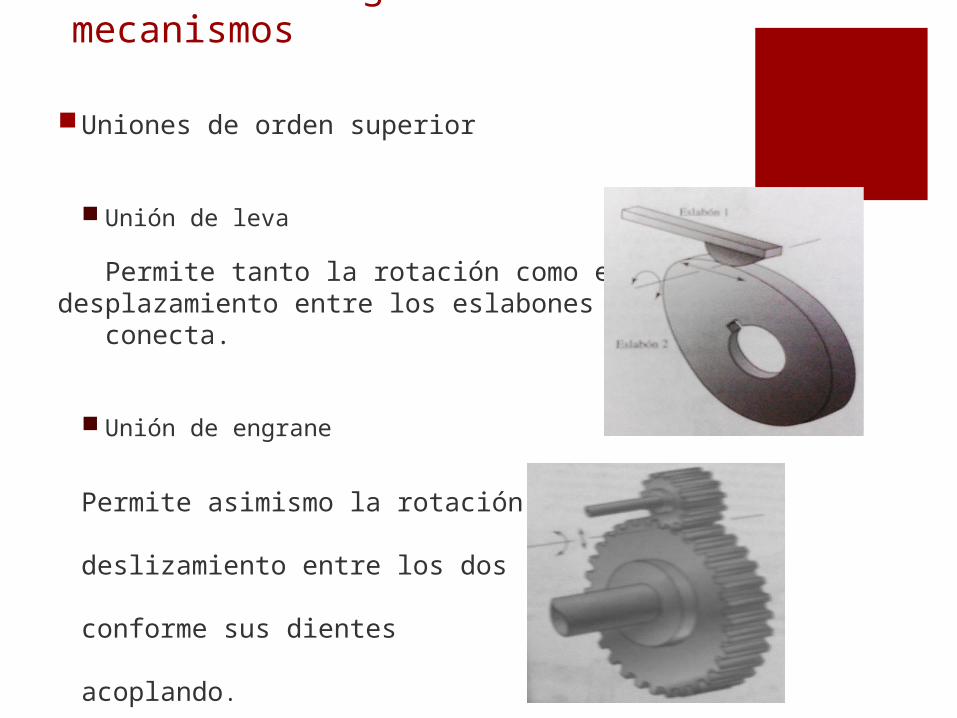
Punto de interés
Es un punto del eslabón donde el movimiento tiene un interés especial.
*Representación cinemática:
Eslabonamiento de cadena abierta
Una cadena abierta tiene, por lo menos, un eslabón que está conectado únicamente a otro eslabón.
Ejemplo: Brazos robóticos, retroexcavadoras y grúas
Eslabonamiento de cadena cerrada
Cada eslabón en la cadena cinemática cerrada se conecta a dos o más eslabones.
1.5 Diagramas cinemáticos
Cuándo se analiza el movimiento de una máquina, es frecuente que se dificulte visualizar a simple vista el movimiento se sus componentes.
Esto es, que en una maquina ensamblada resulta difícil concentrarse en el movimiento del mecanismo en estudio.
Por lo que es más fácil representar sus partes en una forma esquemática, a manera que sólo se muestre las dimensiones que influyen en el movimiento del mecanismo. A estos se les conoce como diagramas cinemáticos.

1.5 Diagramas cinemáticos
Eslabón simple
Forma común Representación cinemática
Eslabón simple (con un punto de interés)
Eslabón complejo

1.5 Diagramas cinemáticosUnión de perno
Unión de corredera
Unión de leva

1.5 Diagramas cinemáticos
Unión de engranes

1.6 Inversión cinemática
Se le denomina inversión cinemática a la obtención de un mecanismo diferente a partir de otro dado, sin cambiar su número y tipo de pares cinemáticos, sino solamente el eslabón que actúa como bancada.
1.7 Movilidad
El número de grados de libertad representa el número de actuadores necesarios para operar el mecanismo.
Los grados de libertad o movilidad de un mecanismo, se representan con la letra M.

1.7.1 Ecuación de Gruebler
Para calcular los grados de libertad en un mecanismo, se utiliza la sig. fórmula:
M= 3(n-1) - 2jp - jhDonde:
n= número total de eslabones en el mecanismo.
jp= número total de uniones principales (pernos o correderas)
jh= número total de uniones de orden superior (levas o engranes)

1.7.2 Actuadores e impulsores Para poder operar una máquina, dependiendo del
número de grados de libertad de ésta, será el número de impulsores que necesite para que pueda funcionar.
Impulsores más comunes:
a) Motores de corriente alterna
b) Motores eléctricos de corriente continua
c) Motores de gasolina
d) Servomotores
e) Motores hidráulicos
f) Cilindros hidráulicos
g) Actuadores de tornillo
h) Mecanismos manuales

1.8 Eslabones y uniones usados comúnmente1.8.1 Manivela excéntrica
En los mecanismos que requieren mayor longitud en una manivela, y no es factible ajustas al tamaño adecuado los soportes con uniones de pernos, la solución mayormente consiste en diseñar el eslabón como un cigüeñal excéntrico.
El perno, sobre el extremo móvil, se alarga. La circunferencia exterior del lóbulo circular sobre el cigüeñal se convierte en una unión de perno móvil.

1.8.2 Unión de perno en una ranura
La unión de un perno en una ranura, es muy común, y representa una unión de orden superior.
Permite que los dos eslabones giren y se deslicen entre sí.
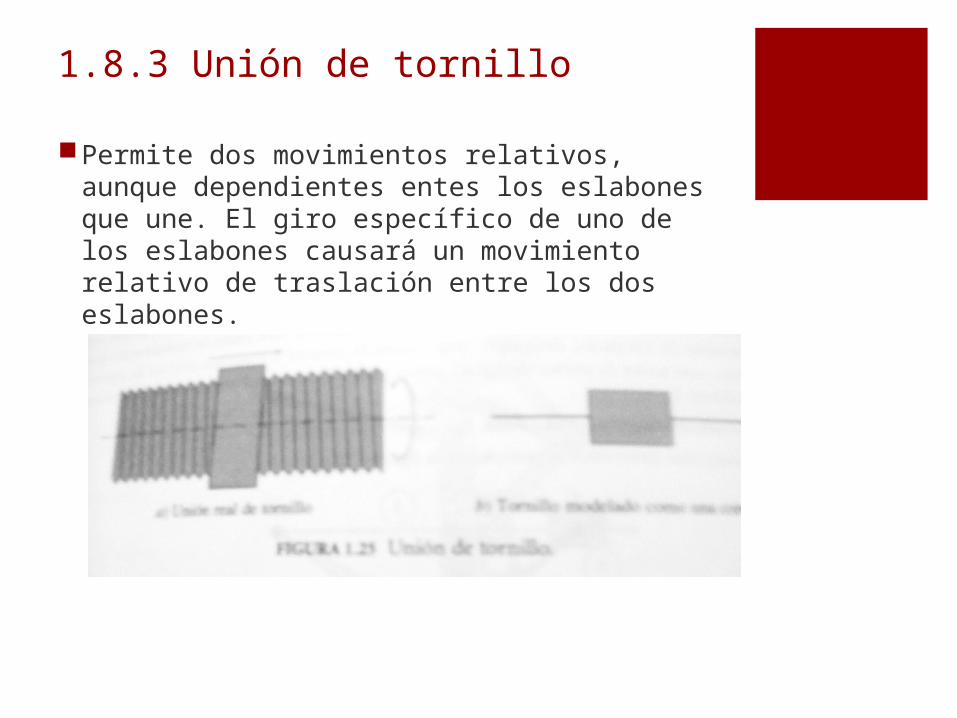
1.8.3 Unión de tornillo
Permite dos movimientos relativos, aunque dependientes entes los eslabones que une. El giro específico de uno de los eslabones causará un movimiento relativo de traslación entre los dos eslabones.
1.9 Casos especiales de la ecuación de la movilidad En algunos mecanismos se tienen conectado
tres eslabones a una solo unión de perno.
Físicamente, se utiliza un perno para conectar los tres eslabones. Pero para el análisis cinemático se tomarán como dos uniones, una conectará los eslabones uno y dos, y la segunda unión conectará a los eslabones dos y tres.

1.10 El mecanismo de 4 barras
Es el más simple y común de todos. Resulta de la combinación de 4 eslabones (uno como bancada) conectados por 4 uniones de perno.
Su movilidad:
n= 4, jp= 4 pernos, jh= 0
M = 3(4-1) - 2(4) – 0
M = 1
1.10.1 Criterio de Grashof
Es una relación muy simple que predice el comportamiento de rotación o rotabilidad en los procesos de inversión cinemática en un eslabonamiento de 4 barras, basado solamente en las longitudes de los eslabones.
Sea: S = longitud del eslabón más corto L = longitud del eslabón más largo P = longitud de uno de los eslabones de longitud
intermedia Q = longitud del otro eslabón de longitud
intermedia

1.10.1 Criterio de Grashof
El teorema de Grashof establece que un mecanismo de 4 barras tiene al menos un eslabón giratorio si:
S + L ≤ P +Q
Mecanismos no Grashof S + L > P +Q
Mecanismos Grashof con puntos muertos S + L = P +Q

1.10.2 Caso 1.1 (doble manivela)S + L ≤ P +Q
Si se fija el eslabón más corto, se obtendrá un doble rotatorio, en el que ambos eslabones pivotados a la bancada realizarán revoluciones completas así como lo hace el acoplador.1.10.2 Caso 1.2 (manivela-
balancín) S + L ≤ P +Q
Si se fija cualquier eslabón adyacente al más corto, se obtiene un mecanismo rotatorio-oscilatorio donde el eslabón más corto girará por completo y el otro eslabón oscilará pivotado a la bancada.
1.10.2 Caso 1.3 (doble balancín) S + L ≤ P +Q
Si se fija el eslabón opuesto al más corto, se obtendrá un doble oscilatorio de Grashof, en el que ambos eslabones pivotados a la bancada oscilan y sólo el acoplador realiza una revolución completa.

S + L = P +Q
Este caso se conoce como *Caso especial de Grashof, en donde todas las inversiones cinemáticas serán todas rotatorias o rotatorio-oscilatorio pero tendrán puntos de cambios o puntos muertos.
1.10.3 Clase 2 (triple balancín) S + L > P +Q
Todas las inversiones cinemáticas serán triples osciladores
1.10.3 Clase 3 (triple balancín)