Álgebras de Lie. Estructura y construcciónSophus Lie tropez´o con los trabajos de Evariste Galois...
81
Laura Soria García María del Pilar Benito Clavijo Facultad de Ciencias, Estudios Agroalimentarios e Informática Grado en Matemáticas 2014-2015 Título Director/es Facultad Titulación Departamento TRABAJO FIN DE GRADO Curso Académico Álgebras de Lie. Estructura y construcción Autor/es
Transcript of Álgebras de Lie. Estructura y construcciónSophus Lie tropez´o con los trabajos de Evariste Galois...

Laura Soria García
María del Pilar Benito Clavijo
Facultad de Ciencias, Estudios Agroalimentarios e Informática
Grado en Matemáticas
2014-2015
Título
Director/es
Facultad
Titulación
Departamento
TRABAJO FIN DE GRADO
Curso Académico
Álgebras de Lie. Estructura y construcción
Autor/es

© El autor© Universidad de La Rioja, Servicio de Publicaciones, 2015
publicaciones.unirioja.esE-mail: [email protected]
Álgebras de Lie. Estructura y construcción, trabajo fin de gradode Laura Soria García, dirigido por María del Pilar Benito Clavijo (publicado por la
Universidad de La Rioja), se difunde bajo una LicenciaCreative Commons Reconocimiento-NoComercial-SinObraDerivada 3.0 Unported.
Permisos que vayan más allá de lo cubierto por esta licencia pueden solicitarse a los titulares del copyright.

Facultad
Facultad de Ciencias, Estudios Agroalimentarios e Informática Titulación
GRADO EN MATEMÁTICAS Título
ÁLGEBRAS DE LIE. ESTRUCTURA Y CONSTRUCCIÓN Autor/es
LAURA SORIA GARCÍA Tutor/es
MARÍA DEL PILAR BENITO CLAVIJO Departamento
MATEMÁTICAS Y COMPUTACIÓN Curso académico
2015/2016


´
Algebras de Lie
Estructuras y construcciones
Autora: Laura Soria Garcıa
Tutora: Marıa del Pilar Benito Clavijo
D2
= so(4) A2
= su(3) B2
= so(5) C2
= sp(2 · 2) G2
= Aut(O)
Grado en Matematicas
Facultad de Ciencias, Estudios Agroalimentarios e Informatica
Universidad de La Rioja
Junio 2015


En primer lugar, quiero agradecer todo el esfuerzo y dedicacion
que ha empleado mi tutora Marıa del Pilar Benito Clavijo
en que la elaboracion de esta memoria me ayudase
a asentar viejos y nuevos conocimientos.
Tambien agradecer a todas las personas que me han apoyado
durante la realizacion del Grado.
I


Resumen
En 1992, P.Turkowski [12] clasifica las algebras de Lie reales 9-dimensionales e indescom-ponibles que admiten un factor de Levi no trivial. La descripcion de tales algebras, se hacemediante: constantes de estructura, la previa clasificacion de algebras resolubles de dimension 6dadas en [9] y la teorıa de representacion de las algebras simples reales 3-dimensionales, so(3,R)y sl(2,R). Este tipo de construcciones responden a un esquema mas general L(L,M) = L�
⇢
Mdonde L y M son algebras de Lie y ⇢ : L ! gl(M) una representacion (homomorfismo dealgebra de Lie) tal que ⇢(L) ✓ Der(M). Esta ultima condicion equivale a decir que el conjuntoimagen ⇢(L) de la representacion esta formada por transformaciones lineales ⇢
x
: M ! M , queson derivaciones del producto interno de M , m ·m0, esto es:
⇢x
(m ·m0) = ⇢x
(m) ·m0 +m · ⇢x
(m0).
El objetivo de este Trabajo Fin de Grado es explicar este tipo de construcciones y aplicarlas ala clasificacion de Turkowski. Las tecnicas que usaremos estan basadas en el Algebra Lineal yel uso de operadores de derivacion parcial sobre el anillo de polinomios en dos indeterminadas,sobre un cuerpo arbitrario de caracterıstica cero.
III


Abstract
In 1992, P. Turkowski [12] classified the 9-dimensional and indecomposable real Lie alge-bras that admit a nontrivial Levi factor. That algebras description are made using: structureconstants, previous classification of 6-dimensional solvable algebras developed in [9], and therepresentation theory of the 3-dimensional real simple algebras so(3,R) and sl(2,R). This typeof constructions are according to a more general diagram, L = L �
⇢
M where L and M areLie algebras and ⇢ : L ! gl(M) is a representation (Lie algebras homomorphism) such that⇢(L) ✓ Der(M). This last condition is equivalent to saying that the imagen set ⇢(L), of theprevious representation is made up by linear maps ⇢
x
: M ! M that are derivations of the M ,m ·m0 internal product, that is,
⇢x
(m ·m0) = ⇢x
(m) ·m0 +m · ⇢x
(m0).
The final degree project target is developed in order to explain this type of constructions and tobe able to apply in Turkowski classification. This tecniques that we will use are based on LinearAlgebra and the use of partial derivation operators over polynomial ring in two indeterminatesover a zero characteristic arbitrary field.
V


´
Indice general
´
Indice general VII
Introduccion 1
Marco y objetivos del TFG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Trabajo realizado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.
´
Algebras de Lie 3
1.1. Definiciones y resultados basicos . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2. Teorıa de representacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.3. La construccion L = S �
⇢
R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.4. Resultados de estructura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.
´
Algebras de Lie 9-dimensionales 25
2.1. Resultados especıficos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.2. Construcciones de algebras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Conclusion 47
Anexo 49
Structure of Real Lie Algebras, P.Turkowski (1992) . . . . . . . . . . . . . . . . . . . . 49
Bibliografıa 67
VII


Introduccion
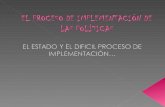
El origen de las algebras de Lie esta en la Geometrıa y las Ecuaciones Diferenciales. Estasultimas, modelan fenomenos fısicos de la vida cotidiana y sus metodos de resolucion han sidoestudiados por numerosos cientıficos; entre ellos, el matematico Sophus Lie (1842� 1899). Estematematico noruego que creo gran parte de la Teorıa de simetrıa continua, mantuvo contactocon importantes matematicos de su epoca (Klein, Darboux, Poincaire, Killing y Cartan entreotros).
Sophus Lie W. Killing E. Cartan E.E. Levi
Sophus Lie tropezo con los trabajos de Evariste Galois (1811-1832) y encontro ciertas se-mejanzas entre la teorıa de Galois sobre resolubilidad de ecuaciones y sus conclusiones acercade la resolucion de ciertas ecuaciones diferenciales. En las tecnicas establecidas por ambos ma-tematicos, la estructura de grupo, juega un importante papel.
En Alemania, donde los trabajos de Lie no fueron muy considerados, el matematico W.Killing (1847-1923) discıpulo de Weierstrass, define el concepto de algebra de Lie. Sus contac-tos cientıficos con Lie y Engel (1861-1941) animan a Killing a acometer la clasificacion de lasalgebras de Lie simples de dimension finita. Por el contrario en Francia los trabajos de Lietuvieron gran aceptacion. Un joven Elie Cartan (1869-1951) conoce los intentos de clasifica-cion de Killing, ordena los trabajos realizados en este tema por Killing y Engel y obtiene lacompleta clasificacion de las algebras de Lie simples complejas en su tesis. Este hito, punto departida del estudio estructurado de las algebras de Lie, es uno de los grandes descubrimientosen matematicas de todos los tiempos.
Marco y objetivos del TFG
Uno de los objetivos fundamentales del Algebra es la clasificacion de estructuras salvo iso-morfismo. En esta lınea de trabajo se enmarca este proyecto, en el que mediante el estudiode construcciones basicas de algebras de Lie tratamos de dar explicacion a la estructura yclasificacion de algunos tipos de algebras de Lie en dimensiones pequenas.
1

2 INTRODUCCION
La clave esta en el llamado Teorema de Levi (E.E. Levi, 1905) que asegura que todo algebrade dimension finita sobre un cuerpo de caracterıstica cero se puede descomponer como sumadirecta de un algebra de Lie semisimple S y un algebra de Lie resoluble R. El algebra de Liesemisimple S es una subalgebra de L que se dice factor de Levi de L (no es unica) y R resultaser un ideal (unico) y es conocido como radical resoluble de L .
Las algebras con radical resoluble trivial denominadas semisimples son de especial interes,pues se pueden descomponer como suma directa de algebras simples. Los trabajos de Engel,Killing y Cartan que culminan la clasificacion de las algebras de Lie simples proporcionan portanto, la clasificacion de las semisimples. Luego segun lo enunciado por Levi, solo faltarıa saberla clasificacion de las algebras resolubles, para conocer cualquier algebra de Lie en caracterısti-ca cero. Pero la clasificacion de las resolubles es un problema ’salvaje’. En 1945, Anatoly I.Malcev reduce este problema a la clasificacion de las algebras de Lie nilpotentes, sus algebrasde derivaciones, sus grupos de automorfismos y algunos otros invariantes [8]. De hecho, es facilprobar que toda algebra resoluble es suma de dos nilpotentes (ver [5, Teorema 1]). Los avancesen la clasificacion de nilpotentes no son muy significativos y se reducen a clasificaciones en di-mensiones modestas o con propiedades muy restrictivas. En [4] se puede encontrar un resumenhistorico de las investigaciones sobre esta clasificacion.
Trabajo realizado
El trabajo realizado comienza su viaje en el verano de 2014. Con ayuda del libro [2] y sobretodo, las reuniones semanales con mi tutora a partir del mes de Septiembre, conseguı introdu-cirme en el mundo de las algebras de Lie. En dichas reuniones, comentabamos las dificultadescon las que me iba encontrando en cada uno de los 6 de 15 capıtulos que tuve que estudiardel libro. Leer algebra avanzada en ingles ha sido una de las primeras dificultades con la queme he tropezado (demasiados tecnicismos). Otro de los obstaculos ha sido lo alejado que seencontraba el Algebra Lineal que estudie en el primer curso del Grado en Matematicas, por loque tuve que dar un buen repaso.
A principios de Diciembre comence la incursion en el artıculo cientıfico de Turkowski [12].Antes de empezar a elaborar alguna de las proposiciones, lemas y teoremas de la memoria,tuve que realizar un gran trabajo de campo. Hacer ejercicios basicos ası como estudiar ejemplosha sido crucial en el desarrollo de la memoria, para poder entender conceptos y solucionardudas. Tras el trabajo de campo, integrado en la primera parte del Capıtulo 1 de esta memoria,se inicio el estudio tecnico de la clasificacion de las algebras de Lie 9-dimensionales realizadapor Turkowski. El autor describe las algebras mediante constantes de estructura usando laclasificacion de algebras de Lie resolubles de dimension 6, dadas en [9]. Esta tecnica se basaen la resolucion de sistemas no lineales que, en grandes dimensiones son inmanejables, verintroduccion Seccion 1.3 de la memoria.
Los primeros resultados tecnicos que se necesitan en nuestro estudio (Proposiciones 1.1.15y 1.1.16) estan inspiradas en el Teorema 2.2 de [12]. El enunciado y la demostracion de ambosresultados fueron guiados por mi tutora. En ese momento, es cuando me di cuenta de lo complejoque puede llegar a ser escribir de forma correcta en matematicas. El estudio de diferentes formasde construir algebras de Lie conforma la segunda parte del Capıtulo 1. El Lema 1.3.2, conocidageneralizacion de la llamada extension escindida nula, [7, Capıtulo 1], es uno de los resultadosque mas hemos utilizado en el Capıtulo 2 que cierra esta memoria. En este Capıtulo final seestablecen los principios basicos de la clasificacion de las algebras de Lie 9-dimensionales noresolubles elaborada en [12]. Los tres ultimos Teoremas incluidos cuyos enunciados han sidoconstruidos en base a la clasificacion dada por Turkowski, aportan una demostracion originalque pone punto final a esta memoria.

Capıtulo 1
´
Algebras de Lie
Las algebras de Lie de dimension finita son objetos bastante sencillos de describir. Se puedenmodelizar (caracterıstica arbitraria) como espacios vectoriales de matrices, cerrados para elproducto antisimetrizado x�y = xy�yx, xy producto habitual de matrices. Esta afirmacion esconsecuencia del llamado Teorema de Ado-Iwasawa [7, Capıtulo 6, Secciones 2 y 3]. A pesar dela dura clasificacion de Killing-Cartan de algebras de Lie simples,1 basada en espacios raıces,no es necesario usar tecnicas muy sofisticadas para obtener algunos resultados de interes. Conun poco de Calculo y Algebra Lineal en los primeros niveles de aprendizaje de estas algebrasse pueden lograr pequenas victorias.
A lo largo de este capıtulo supondremos que todos los espacios vectoriales son finito-dimensionales y estan definidos sobre un cuerpo F de caracterıstica cero salvo que se establezcalo contrario.
1.1. Definiciones y resultados basicos
En esta seccion introducimos las definiciones y resultados basicos que vamos a necesitar parael desarrollo del trabajo. Los contenidos incluidos aparecen en [2] (algunos han sido ampliadosusando [6], [7] y [10]).
Definicion 1.1.1. Un algebra sobre un cuerpo F o F-algebra es un espacio vectorial A sobre Fjunto con una aplicacion bilineal,
A⇥A ! A, (x, y) 7! xy.
Definimos xy como el producto entre x e y. El algebra A se dice asociativa si
(xy)z = x(yz) 8x, y, z 2 A.
Las matrices (de cualquier orden) y los polinomios son ejemplos de algebras en las que elproducto cumple la identidad anterior. El conjunto EndF(V ), formado por todos los endomor-fismos (aplicaciones de V en V ) de un espacio vectorial V , tambien lo es. Si la dimension deV es n, fijando una base podemos hacer una identificacion entre EndF(V ) y M
n
(F) ya que sonalgebras isomorfas.
Definicion 1.1.2. Un algebra de Lie L, sobre un cuerpo F, es un espacio vectorial junto conun producto binario llamado corchete de Lie, satisfaciendo las siguientes propiedades,
1Reconocido por la comunidad cientıfica como uno de los grandes descubrimientos en Matematica de todos
los tiempos.
3

4 CAPITULO 1. ALGEBRAS DE LIE
[x, x] = 0 8x 2 L.
La identidad de Jacobi, J(x, y, z) = [x, [y, z]] + [y, [z, x]] + [z, [x, y]] = 0 8x, y, z 2 L.
De la identidad [x, x] = 0, obtenemos la identidad [x, y] = �[y, x]. Por eso se dice queel producto binario en un algebra de Lie es antisimetrico. Si el cuerpo F tiene caracterısticadistinta de dos, ambas identidades son equivalentes.
Si en un espacio vectorial V introducimos el producto binario nulo, tenemos un algebra deLie. Este tipo de algebras de Lie se denominan abelianas. Es facil probar que dada (A, a · b) unalgebra con un producto asociativo, entonces (A, [a, b]) con [a, b] = a · b� b · a es un algebra deLie. Este algebra suele denotarse como A�.
Ejemplo 1. Supongamos que V es un espacio vectorial sobre el cuerpo F de dimension finita,n. El algebra general lineal, gl(V ), es el conjunto de todos los endomorfismos con el corchete deLie, [x, y] := x � y � y � x, donde � denota la composicion de aplicaciones.
Ejemplo 2. La version matricial de gl(V ) la escribimos como gl(n,F) para el espacio vectorialde todas las matrices n⇥ n, sobre el cuerpo F, con el corchete de Lie [x, y] := xy � yx; en estecaso xy denota el producto usual entre matrices.
Notacion 1.1.3. En general, dados U, V subconjunto del algebra de Lie L, la expresion [U, V ]denotara:
[U, V ] = spanFh[u, v] : u 2 U, v 2 V i =(
n
X
i=1
ti
[ui
, vi
] : ui
2 U, vi
2 V, ti
2 F
)
.
Definicion 1.1.4. Una subalgebra de Lie de un algebra de Lie L, es un subespacio vectorialK ✓ L de tal forma que,
[x, y] 2 K 8x, y 2 K.
Un ideal I de un algebra de Lie L es un subespacio I de L de tal forma que
[x, y] 2 I 8x 2 L, y 2 I.
En cualquier algebra de Lie L, los subespacios de dimension uno y cualquier ideal son subalge-bras. Uno de los ideales mas importante de L es el centro definido por,
Z(L) := {x 2 L : [x, y] = 0 8y 2 L} .La suma e interseccion de ideales proporciona nuevos ideales. La interseccion de subalgebras,
nuevas subalgebras, pero la suma, en general, no produce subalgebras.El concepto de ideal permite introducir la estructura cociente: el conjunto de clases L/I
asociadas a la relacion de equivalencia a ⇠ b , a � b 2 I, con las operaciones “naturales”heredadas de L, tiene estructura de algebra de Lie.
Definicion 1.1.5. Si L1
y L2
son algebras de Lie sobre el cuerpo F, entonces decimos que, laaplicacion ' : L
1
! L2
es un homomorfismo de algebras de Lie, si ' es una aplicacion lineal y
'([x, y]) = ['(x),'(y)] 8x, y 2 L1
.
Los conceptos de nucleo Ker' e imagen Im' y los teoremas de isomorfıa aparecen deforma natural asociados a los homomorfismos de Lie. De este modo tenemos que el nucleode un homomorfismo ', es un ideal y que la imagen es una subalgebra isomorfa al cocientedel algebra inicial por el nucleo. Un homomorfimo muy importante a tener en cuenta es elhomomorfismo adjunto que queda definido de la siguiente manera. Si L es un algebra de Lie,
ad : L ! gl(L), ad x(y) := [x, y] 8x, y 2 L.

1.1. DEFINICIONES Y RESULTADOS BASICOS 5
Definicion 1.1.6. Sea A un algebra sobre el cuerpo F, una derivacion de L es una aplicacionlineal D : L ! L de tal forma que
D(ab) = aD(b) +D(a)b 8a, b 2 L.
Denotaremos Der L al conjunto de las derivaciones de L que, con el producto conmutador,es un algebra de Lie. Por tanto, Der L es una subalgebra del algebra general lineal gl(L). Laidentidad de Jacobi prueba que, para cualquier elemento x 2 Der L, el producto a izquierdapor el elemento x es una derivacion que se denota por ad
L
x : L ! L, adL
x(a) = [x, a]. Enefecto:
adL
x([y, z]) = [x, [y, z]] = �[y, [z, x]]� [z, [x, y]] =
[y, [x, z]] + [[x, y], z] = [y, adL
x(z)] + [adL
x(y), z].
Este tipo de derivaciones se dicen derivaciones internas. El conjunto de todas las derivacionesinternas
Inner L = {adL
x : x 2 L},es un ideal de Der L.
Observamos que el conjunto imagen del homomorfismo adjunto son todas las derivacionesinternas de L y el nucleo coincide con el centro de L. Por tanto, aplicando el primer Teoremade isomorfıa,
L/Z(L) ⇠= Inner L ✓ Der L.
Definicion 1.1.7. Dada un algebra de Lie podemos construir dos series de ideales de formarecursiva,
L(1) = L, L(n) = [L(n�1), L(n�1)], 8n 2 N con n > 1
L1 = L, Ln = [L,Ln�1], 8n 2 N con n > 1
A la primera se le llama serie derivada; si esta serie acaba en 0, es decir, existe n > 1 talque L(n) = 0, se dice que L es resoluble. A la segunda se le llama serie central descendente;si esta serie acaba en 0, es decir, existe n > 1 tal que Ln = 0, se dice que L es nilpotente. Alnatural n mınimo que cumple L(n) = 0 (Ln = 0) se le llama ındice de resolubilidad (ındice de
nilpotencia o nilındice).
Definicion 1.1.8. Sea L un algebra de Lie, el ideal resoluble mas grande de L, se diceradical de L; lo denotaremos por R(L). Por otro lado, la suma de todos los ideales nilpotentesde L, es otro ideal nilpotente que se denomina nilradical de L y se denota por N(L).
Los ideales R(L) y N(L) resoluble y nilpotente respectivamente de un algebra de Lie L,mantienen la siguiente relacion [7, Theorem 13, pag. 51]:
Teorema 1.1.9. Para cualquier algebra de Lie finito-dimesional L, con radical resoluble R(L)y nilpotente N(L), tenemos que [L,R(L)] ✓ N(L).
Los terminos de las series derivada y descendente, L(n) y Ln son ideales de L. Ademas soninvariantes por derivaciones, esto es, para cualquier d 2 Der L, d(L(n)) ✓ L(n) y d(Ln) ✓ Ln.Tambien, son invariantes por derivaciones el radical R(L) (en caracteristica prima falla ver[7, Capıtulo I, ejercicio 22]), el nilradicalN(L) y sus respectivos centros Z(R(L)) y Z(N(L)). Losideales que son invariantes por derivaciones se dicen ideales caracterısticos. Una caracterizaciondel nilradical que usaremos es:

6 CAPITULO 1. ALGEBRAS DE LIE
Proposicion 1.1.10. Para un algebra de Lie L, el nilradical se puede describir en la forma,
N(L) = {x 2 R(L) : adR(L)
x nilpotente}.En particular, para cualquier x 2 R(L) tal que x /2 N(L), la aplicacion lineal ad
R(L)
x : R(L) !R(L), no es nilpotente.
Definicion 1.1.11. Un algebra de Lie L, se dice semisimple si R(L) = 0. Si ademas, L notiene ideales propios y L2 6= 0, entonces se trata de un algebra de Lie simple.
Observamos que, las algebras de Lie que son suma directa de ideales que a su vez son algebrasde Lie simples, son semisimples.
Ejemplo 3. Vamos a presentar las algebras de Lie simples clasicas, todas ellas son subalge-bras del algebra de Lie de matrices gl(n,F) introducida en el Ejemplo 2 sobre un cuerpo F.Empezamos definiendo el algebra especial lineal, sl(l + 1,F), que se trata del espacio vectorialde matrices (l + 1, l + 1)⇥ (l + 1, l + 1) de traza nula. Ademas es subalgebra de gl(l + 1,F).
Las que restan, se pueden definir usando formas bilineales no degeneradas inducidas poruna matriz S (regular) simetrica o antisimetrica, de la siguiente forma:
L(S) := {x 2 gl(n,F) : xtS = �Sx}.Si S =
�
0 I
l
I
l
0
�
luego n = 2l entonces estaremos frente al algebra de Lie ortogonal par, o(2l,F);sus elementos presentan la siguiente estructura de bloques de matrices l ⇥ l,
o(2l,F) :=��
M N
P Q
�
: MT = �Q, NT = �N, PT = �P
.
Si S =⇣
1 0 0
0 0 I
l
0 I
l
0
⌘
luego n = 2l + 1 entonces estaremos frente al algebra de Lie ortogonal impar,
o(2l+1,F); la descripcion de elementos viene dada por bloques de matrices, 1⇥ l, l⇥ 1 y l⇥ l:
o(2l + 1,F) :=n⇣
0 p q
r M N
s P Q
⌘
: Q = �MT , NT = �N, PT = �P, r = �qT , s = �pTo
.
Por ultimo, si S =�
0 I
l
I
l
0
�
entonces tendremos el algebra simplectica, sp(2l,F), descrita porbloques l ⇥ l de la forma:
sp(2l,F) :=��
M N
P Q
�
: MT = �Q, NT = N, PT = P
.
Otra notacion para las algebras clasicas es: sll+1
(F), o2l
(F), o2l+1
(F) y sp
2l
(F).
Si F es algebraicamente cerrado, estas algebras (excepto la o(2,F) = F�F) y las excepcionalesE
6
, E7
, E8
, F4
y G2
(para ver descripciones ver [7]) son salvo isomorfismo, todas las algebrasde Lie simples.
Teorema 1.1.12. (E.E. Levi, 1905) Dada L un algebra de Lie finito dimensional sobre un
cuerpo F de caracterıstica cero, existe una subalgebra S L semisimple tal que L = S �R(L).
A la descomposicion L = S � R(L) se le dice descomposicion de Levi de L y el algebrasemisimple S se denomina factor de Levi de L.
Teorema 1.1.13. (Malcev-Harish-Chandra, [7]) Sea L un algebra de Lie sobre un cuerpo Fde caracterıstica cero y finito-dimensional con descomposicion de Levi L = S � R(L). Para
cualquier subalgebra semisimple S1
de L, siempre existe un ' automorfismo interno
2
de L, talque '(S
1
) ✓ S.
2Un isomorfismo de L en L, se dice automorfismo. El conjunto formado por todos los automorfismos de L
se denota por AutL y tiene estructura de grupo con la composicion. Los automorfismo de la forma exp(ad
L
x)
para ad
L
x nilpotente se dicen automorfismos internos (ver [6]).

1.1. DEFINICIONES Y RESULTADOS BASICOS 7
Observamos que, si I es un ideal de un algebra de Lie L, el radical resoluble de I coincidecon R(I) = R(L) \ I, y por el Teorema previo, los factores de Levi de I se pueden sumergiren factores de Levi de L. Ası, dado S factor de Levi de I, la descomposicion de Levi de I es:I = S � (R(L) \ I).
Definicion 1.1.14. Un algebra de Lie se dice descomponible (indescomponible) si puede (nopuede) ser descompuesta como suma directa de ideales.
Proposicion 1.1.15. Todo algebra de Lie L, de dimension finita, descomponible sobre uncuerpo arbitrario, se puede descomponer como suma directa de ideales que son algebras de Lieindescomponibles.
Demostracion. Denotemos la dimension de L, como m. Dado que L es descomponible, supon-dremos que se podra obtener como suma directa de dos ideales propios I y J . Siendo I el idealindescomponible mas grande de L, de dimension n > 0. Por tanto, la dimension de J serap = m� n > 0 y L = I � J , con [I, J ] = 0.
Ahora, si J es indescomponible, L es suma de dos ideales indescomponibles y habremosterminado. En otro caso, si J descomponible, J = J
1
� J2
, suma directa de dos ideales de J .Donde J
1
, es el ideal indescomponible mas grande de J , de dimension p1
, por lo que J2
, serade dimension, p
2
= p� p1
con p1
, p2
> 0. Ası, L = I � J1
� J2
; veamos que Ji
con i = 1, 2, sonideales tambien de L. Observamos que [J
i
, I] ✓ [J, I] = 0, luego:
[Ji
, L] = [Ji
, I � J ] = [Ji
, I] + [Ji
, J ] ✓ Ji
.
Por tanto, L es suma directa de los ideales I, J1
, J2
. Razonando en J2
como lo hemos hecho enJ e iterando el proceso, dado que L es de dimension finita, entonces, llegaremos a descomponerL como suma finita de ideales indescomponibles, de la forma L = I
1
� . . .� Ir
.
Ejemplo 4. Por definicion, las algebras de Lie semisimples y no simples en caracterıstica ceroson descomponibles. Veamos un ejemplo de algebra de Lie indescomponible, cuya descomposi-cion de Levi es 3 L
9,59
= S � V donde S = spanFhx1
, x2
, x3
i ⇠= sl
2
(F) simple y 3-dimensional
y V = spanFhx4
, x5
, . . . , x9
i con V 2 = [V, V ] = 0 y [S, V ] = V . Luego, V es un ideal resolubley por tanto R = R(L
9,59
) = V , pues R \ S = 0. Supongamos que L9,59
es descomponible, portanto descompondra como suma directa de dos ideales I
1
e I2
, esto es, L9,59
= I1
� I2
con[I
1
, I2
] = 0. En este caso, como los factores de Levi de L9,59
son isomorfos a sl
2
(F), la unicaposibilidad es que I
1
sea no resoluble y I2
sea resoluble (si I1
, I2
son resolubles, entonces L9,59
es resoluble y eso no ocurre; y tampoco pueden ser los dos no resolubles pues ya obliga a que laparte semisimple de L
9,59
sea de dimension mayor o igual que seis). Al ser L9,59
descomponible,con [I
1
, I2
] = 0. El algebra L9,59
cumple que L2
9,59
= L9,59
. Por tanto, L2
9,59
= I21
� I22
= I1
� I2
,esto nos dice que I
2
= I22
, pero esto no puede darse pues I2
es resoluble. Luego, llegamos a laconclusion de que L es indescomponible.
Proposicion 1.1.16. Si L es un algebra de Lie de dimension finita, no abeliana e indescom-ponible sobre un cuerpo arbitrario, entonces Z(L) ✓ L2.
Demostracion. Demostraremos que si Z(L) 6✓ L2 entonces L es descomponible. Empecemosdefiniendo un ideal de L, U = L2 \Z(L), ideal por ser interseccion de ideales. Ahora tomamos,Z(L) = U � V , con V subespacio complementario de U en Z(L), por tanto U \ V = 0. Dadoque cualquier subespacio de Z(L) es un ideal, entonces V tambien lo es. Definimos otro idealW = L2 � V , suma directa de ideales, por ello, ideal. Buscamos un subespacio complementario
3Ver Comentarios 2.2.3 y Teorema 2.2.2. Ver tambien Tabla 1 en [12]

8 CAPITULO 1. ALGEBRAS DE LIE
de W en L, para ello ampliamos la base de W hasta L mediante una familia linealmenteindependiente, {t
1
, . . . , tr
}, y denotamos por T = spanFht1, . . . , tri, es decir, T es el espaciovectorial generado por {t
1
, . . . , tr
}. Luego,L = W � T = L2 � V � T = (L2 � T )� V.
Observemos que L2�T es un ideal de L pues es un subespacio y contiene a L2. Ademas, veamosque tanto V como L2 � T son ideales no nulos,
V 6= 0 pues es el complementario de U en Z(L) y Z(L) 6✓ L2.
L2 � T 6= 0 pues L2 6= 0.
Por tanto, L es en efecto descomponible.
1.2. Teorıa de representacion
La teorıa de representacion permite ver un algebra de Lie de dimension finita como subalge-bra del algebra de Lie de endomorfismos de un espacio vectorial. En esta seccion vamos apresentar los elementos basicos de esta teorıa y aquellos resultados que necesitaremos para eldesarrollo de la memoria.
Definicion 1.2.1. Una representacion de un algebra de Lie es un homomorfismo de algebrasde Lie
⇢ : L ! gl(V ),
con V un espacio vectorial finito. Al espacio vectorial V junto con la accion x · v = ⇢(x)(v) sele llama modulo de L o L-modulo. La representacion ⇢ se dice fiel si Ker⇢ = {0} o trivial si⇢ ⌘ 0 (equivalentemente, Ker⇢ = L)
Definicion 1.2.2. Sea V un modulo de un algebra de Lie L. Un submodulo de V es unsubespacio vectorial W de V , invariante bajo la accion de L. Esto es, para cada x 2 L y paracada w 2 W , tenemos x · w 2 W .
Definicion 1.2.3. Un modulo V se dice irreducible si es no nulo y no posee submodulos propios.Un modulo V se dice completamente reducible cuando se puede descomponer como suma directade modulos irreducibles; esta afirmacion es equivalente a que cualquier submodulo de V tengaun modulo complementario en V .
Notar que la suma e interseccion de submodulos nos proporcianan nuevos submodulos.
Definicion 1.2.4. Sea W un submodulo de un L-modulo V . El espacio vectorial cociente W/Vjunto con la operacion,
x · (v +W ) := (x · v) +W para x 2 L y v 2 V,
adquiere estructura de L-modulo. Lo llamaremos cociente o modulo factor.
Definicion 1.2.5. Sea V un L-modulo se dice indescomponible si no hay submodulos U y Wde tal forma que L = U �W .
Ejemplo 5. Cualquier espacio vectorial V se puede ver como modulo mediante la represen-tacion trivial. Los submodulos son exactamente los subespacios vectoriales de V , este moduloes completamente reducible y los submodulos irreducibles son los subespacios de dimensionuno. Toda algebra de Lie L se puede ver como L-modulo a traves de la representacion ad-junta ad
L
x(y) = [x, y]. En este caso, los submodulos de L son exactamente los ideales y lossubmodulos irreducibles son los ideales minimales.

1.2. TEORIA DE REPRESENTACION 9
Ejemplo 6. Para cualquier subalgebra S de un algebra de Lie L, mediante la aplicacion inclu-sion y la representacion adjunta, podemos ver L como S-modulo. En este caso, todo ideal deL es un submodulo, pero no todo submodulo es un ideal. Los terminos de las series derivada ycentral descendente son submodulos para esta representacion por ser ideales de L.
Teorema 1.2.6. (Teorema de Weyl) Los modulos de cualquier algebra de Lie semisimple en
caracterıstica cero son completamente reducibles. Ademas, el numero de modulos irreducibles
de cualquier descomposicion en suma de irreducibles es invariante y salvo reordenacion, los
modulos que aparecen son isomorfos.
Todo modulo 1-dimensional de un algebra de Lie semisimple es trivial. Operaciones ele-mentales que proporcionan nuevos modulos a partir de otros dados son, la (natural) suma demodulos U + V y el modulo cociente de modulos U/V . Menos natural aunque tambien impor-tante, el producto tensor.
Proposicion 1.2.7. Si V y W son modulos de L, entonces V ⌦W es un modulo de L. Con laaccion definida por g · (v ⌦ w) = (g · v)⌦ w + v ⌦ (g · w).Demostracion. Debemos comprobar que ⇢ : L ! gl(V ⌦W ) dado por ⇢(g)(v⌦w) = g · (v⌦w)es una representacion:
⇢[g, h](v ⌦ w) = [g, h] · (v ⌦ w) = ([g, h] · v)⌦ w + v ⌦ ([g, h] · w)= (g · h · v)⌦ w � (h · g · v)⌦ w + v ⌦ (g · h · w)� v ⌦ (h · g · w)= g · h · (v ⌦ w)� h · g · (v ⌦ w) = [⇢(g), ⇢(h)](v ⌦ w).
Definicion 1.2.8. Sean V,W modulos para un algebra de Lie L. Una aplicacion lineal ✓ : V !W se dice homomorfismo de modulos (con precision de L-modulos) si cumple que
✓(x · v) = x · ✓(v) 8v 2 V, x 2 L.
El conjunto de todos los homomorfismos de L-modulos de V en W lo denotaremos como,Hom
L
(V,W ).
Lema 1.2.9. Para cualquier L algebra de Lie en caracterıstica arbitraria y cualquier ✓ : V ! Whomomorfismo de L-modulos, el nucleo y la imagen de ✓ son submodulos de V y W respecti-vamente y el modulo cociente V/Ker ✓ es isomorfo al modulo Im ✓.
Lema 1.2.10. (Lema de Schur) Sea L un algebra de Lie sobre un cuerpo algebraicamentecerrado F y S un L-modulo finito-dimensional e irreducible. Una aplicacion ✓ : S ! S es unhomomorfismo de L-modulos si y solo si ✓ es un multiplo escalar de la transformacion identidad,esto es, ✓ = �I
S
para algun � 2 F.
Demostracion. ) Suponemos que ✓ : S ! S es un homomorfismo de L-modulos, con S un L-modulo irreducible. Como ✓, es una aplicacion lineal entre espacios vectoriales sobre un cuerpoalgebraicamente cerrado F, existira al menos un valor propio �, asociado a un vector propiopara ✓. Observar que ✓ � �I
S
es tambien un homomorfismo de L-modulos, esto es, pertenece alos Hom
L
(S, S). Como S irreducible, entonces:
O bien S = Ker(✓ � �IS
) , ✓ � �IS
= 0 , ✓ = �IS
.

10 CAPITULO 1. ALGEBRAS DE LIE
O bien Ker(✓ � �IS
) = {0}. Veamos que en este caso llegamos a una contradiccion.Tenemos un valor propio � de ✓, para el cual existe un 0 6= w 2 S vector propio, luegocumple ✓(w) = �w. Por tanto, 0 = ✓(w)� �w = (✓ � �I
S
)(w) y w 6= 0, lo que nos lleva aque w 2 Ker(✓ � �I
S
) = 0, que es una contradiccion.
Entonces, cuando ✓ es un homomorfismo de L-modulos, ✓ = �IS
.( Se debe cumplir que ✓(s · a) = s · ✓(a) 8s 2 L, a 2 S, para que ✓ sea un homomorfismo
de L-modulos. Como ✓ = �IS
,
a) ✓(s · a) = �IS
(s · a) = �(s · a).b) s · ✓(a) = s · (�I
S
(a)) = �(s · IS
(a)) = �(s · a).Como a) y b) son iguales entonces ✓ 2 Hom
L
(S, S).
Representaciones irreducibles de sl
2
(F) 1.2.11. El algebra de Lie semisimple sl
2
(F) dedimension 3 la podemos definir mediante su base estandar: sl
2
(F) = spanFhh, e, fi con [h, e] =2e, [h, f ] = �2f , [e, f ] = h o, alternativamente, como las matrices 2 ⇥ 2 de traza cero {A 2M
2
(F) : tr A = 0} con el producto conmutador. Los modulos irreducibles para este algebra deLie son faciles de describir usando polinomios en 2 variables.
Consideramos el espacio vectorial de polinomios F[X,Y ] en las variables X e Y con coefi-cientes en el cuerpo F. Para cada entero d � 0, denotamos por V (d) el subespacio de polinomioshomogeneos en X e Y de grado d. Observar que V (0) = F · X es un subespacio vectorial 1-dimensional y, para d � 1, los subespacios V (d) tienen una base formada por los monomiosXd, Xd�1Y ,...,XY d�1, Y d. Los subespacios V (d) pueden verse como sl
2
(F)-modulos si conside-ramos derivadas parciales, donde basta con definir la aplicacion lineal '
d
: sl2
(F) ! gl(V (d)),mediante la asignacion,
'd
(e) := X@
@Y, '
d
(f) := Y@
@X, '
d
(h) := X@
@X� Y
@
@Y.
La accion 'd
define, para cada d � 0 una representacion irreducible y, de hecho estas sontodas las representaciones irreducibles finito-dimensionales de sl
2
(F). La accion la podemos verrepresentada en el siguiente diagrama en el que las flechas hacia la izquierda marcan la accionde f y hacia la derecha la accion de e. Las flechas que vuelven al mismo nodo marcan la accionescalar de h.
Observar que V (0) = F ·X, es el modulo trivial y responde al esquema,

1.2. TEORIA DE REPRESENTACION 11
Ejemplo 7. De acuerdo con la representacion '2
: sl2
(F) ! V (2), el modulo irreducible detipo V (2) en el que tomaremos como base V (2) = spanFhX2, XY, Y 2i esta descrito de la forma,usando primero '(e):
e ·X2 = X@(X2)
@Y= 0, e ·XY = X
@(XY )
@Y= X2, e · Y 2 = X
@(XY )
@Y= 2XY .
De forma analoga, usando '2
(f) y '2
(h) llegamos a,
f ·X2 = 2XY, f ·XY = Y 2, f · Y 2 = 0,
h ·X2 = 2X2, h ·XY = 0h · Y 2 = �2Y 2.
Esta accion, la muestra de forma mas esquematica el diagrama,
El Lema de Schur 1.2.10, es valido en cuerpos de caraterıstica cero para el algebra simple3-dimensional escindida. Gracias a la accion del elemento h sobre cualquier modulo irreducible,es escalar.
Lema 1.2.12. (Lema de Schur para sl
2
(F)) V un L-modulo finito-dimensional e irreducible desl
2
(F), para F cuerpo arbitrario. Una aplicacion ✓ : V ! V es un homomorfismo de L-modulos
si y solo si ✓ es un multiplo escalar de la transformacion identidad; esto es, ✓ = �IV
para algun� 2 F.
Hemos denotado por V (n) los sl2
(F)-modulos irreducibles. Ahora, veamos como se consiguensl
2
(F)-homomorfismos entre estos subespacios. El producto tensorial de dos modulos, es denuevo un modulo, y la formula de Clebsch-Gordan nos proporciona una descomposicion delproducto tensor en sus componentes irreducibles, con n m
V (m)⌦ V (n) ⇠= V (m+ n)� V (m+ n� 2)� . . .� V (m� n).
Debemos recordar que, sobre cuerpos algebraicamente cerrados, y para modulos irreduciblesV y W , atendiendo al Lema 1.2.10 se tiene que,
dim HomS
(V,W ) =
⇢
1 si V ⇠= W0 en otro caso
En el caso particular de representaciones del algebra de Lie S = sl
2
(F), la afirmacion anterior esvalida sobre cualquier cuerpo debido al particular Lema de Schur para sl
2
(F) 1.2.12. Aplicandoeste resultado, y el producto tensor V (n)⌦ V (m) concluimos que Hom
S
(V (n)⌦ V (m), V (n+m � 2k)), es un espacio vectorial 1-dimensional. En este caso, solo es necesario encontrar unhomomorfismo no nulo y los demas son multiplos escalares de el.
Consideramos la aplicacion (·, ·)k
: V (n)⌦ V (m) ! V (n+m� 2k), llamada k-esima trans-veccion, introducida en [1] y descrita como:
(f, g)k
=(m� k)!
m!
(n� k)!
n!
k
X
i=0
(�1)i✓
ki
◆
@kf
@Xk�i@Y i
@kg
@Xi@Y k�i
,

12 CAPITULO 1. ALGEBRAS DE LIE
donde 0 k n, con n m. Notar que en el caso en que k = 0, (f, g)0
es la aplicacionidentidad salvo un multiplo escalar.
Dado que las derivaciones parciales son aplicaciones lineales, (·, ·)k
es bilineal, y puesto quesl
2
(F) actua como derivaciones en V (n) y V (m), es ademas un homomorfismo de modulos comoexplica J. Dixmier en [1].
Las propiedades que usaremos sobre descomposiciones de productos tensoriales y sl
2
(F)-homomorfismos, las incluimos en el siguiente Lema.
Lema 1.2.13. Si n � m, V (n), V (m) modulos irreducibles de dimension n+1 y m+1 para elalgebra de Lie sl
2
(F), tenemos que,
a) V (n) ⌦ V (m) ⇠= V (n + m) � V (n + m � 2) � . . . � V (n � m) y esta descomposicion seconoce como formula de Clebsch-Gordan.
b) Para cada 0 k m, la k-esima transveccion
(·, ·)k
: V (n)⌦ V (m) ! V (n+m� 2k)
es un homomorfismo de sl
2
(F)-modulos.
c) Si n = m, (a, b)k
= (�1)k(b, a), luego la k-esima transveccion proporciona un homomor-fismo simetrico si k es par y antisimetrico en el caso k impar.
d) El conjunto Hn,m
= Homsl2(F)(V (n)⌦ V (m), V (s)) tiene dimension 1. Es mas:
Hn,m
=
⇢
spanFh(·, ·)ki si s = n+m� 2k, 0 k m0 en otro caso
Demostracion. La afirmacion a), b) aparece como ejercicio en J.E.Humphreys [6, Cap. VI, Sec-cion 24.4, ejercicio 7]. Para las pruebas de c), d) y e), ver J. Dixmier [1].
Comentarios 1.2.14. Observamos que si V,W,U son S-modulos, todo homomorfismo � 2Hom
S
(V ⌦W,U) define un producto bilineal � : V ⌦W ! U . Es mas, una condicion necesariay suficiente para que � sea homomorfismo de S-modulos es:
s · (v ⌦ w) = (s · v)⌦ (s · w), 8s 2 S, v 2 V, w 2 W.
En el caso V = W esto equivale a decir que para el algebra (V,+,�) y la representacion⇢ : S ! gl(V ), ⇢(S) ✓ Der(V,�).
1.3. La construccion L = S �⇢ R
Como comentamos al principio de la Seccion 1.1, una forma muy sencilla de construir unalgebra de Lie, es tomar un espacio vectorial V y declarar en el, el corchete de Lie nulo,[x, y] = 0, 8x, y 2 V . Otra forma de construir un algebra de Lie L sobre un cuerpo F esmediante las llamadas constantes de estructura. Se trata de escalares ak
ij
2 F que determinande forma unica el producto interno del algebra una vez fijada una base.
Observamos que, si L es de Lie con base {x1
, . . . , xn
}, al ser el producto interno de L unaaplicacion bilineal, [·, ·] : L ⇥ L ! L, el producto [x, y] de dos elementos cualesquiera de L,queda determinado por los productos [x
i
, xj
] de los elementos de la base. Estos productos sepueden describir como combinacion lineal, de la siguiente forma,

1.3. LA CONSTRUCCION L = S �⇢
R 13
[xi
, xj
] :=n
X
k=1
akij
xk
, con i, j = {1, . . . , n}.
La familia de escalares akij
obtenidos de estas expresiones se dicen constantes de estructura
del algebra L. Notar que, como L es de Lie, cuando i = j, akij
= 0, y que estos escalares,dependen de la base que elijamos para el algebra L. Ademas, la identidad de Jacobi introducerestricciones sobre los mismos. De hecho, una familia de escalares proporciona un algebra deLie sobre el espacio vectorial generado por {x
1
, . . . , xn
} si y solamente si cumplen las siguientesrestricciones:
• akii
= 0.
• akij
+ akji
= 0 (equivale a la condicion primera si car F 6= 2).
• arij
amkr
+ arjk
amir
+ arki
amjr
= 0.
Hagamos un ejemplo sobre como construir algebras de Lie mediante constantes de estructura.Tomemos un espacio vectorial L, de dimension dos, cuya base sea {x
1
, x2
}. Vamos a probarque 8a1
12
, a212
2 F el producto [x1
, x2
] = a112
x1
+ a212
x2
define estructura de algebra de Lie alimponer [x
1
, x2
] = �[x2
, x1
] y [xi
, xi
] = 0, 8i = 1, 2. Por lo que se debe cumplir la identidad deJacobi,
X
cıclica
(x
i
,x
j
,x
k
)
[xi
, [xj
, xk
]] = 0, 1 i j k 2
que gracias a [xi
, xi
] = 0 equivale a probar la identidad
X
cıclica
(x1,x2,x3)
[x1
, [x2
, x3
]] = 0,
para x3
= ↵x1
+�x2
. Desarrollando esta expresion, calcularemos las relaciones algebraicas entrelas constantes de estructura:
[x1
,[x2
, x3
]] + [x2
, [x3
, x1
]] + [x3
, [x1
, x2
]]
= [x1
, [x2
,↵x1
+ �x2
]] + [x2
, [↵x1
+ �x2
, x1
]] + [↵x1
+ �x2
, [x1
, x2
]]
= ↵[x1
, [x2
, x1
]] + �[x2
, [x2
, x1
]] + ↵[x1
, [x1
, x2
]] + �[x2
, [x1
, x2
]]
= ↵[x1
, a121
x1
+ a221
x2
] + �[x2
, a121
x1
+ a221
x2
] + ↵[x1
, a112
x1
+ a212
x2
]
+ �[x2
, a112
x1
+ a212
x2
] = ↵a221
[x1
, x2
] + �a121
[x2
, x1
]
+ ↵a212
[x1
, x2
] + �a112
[x2
, x1
] = 0
Entonces,
↵a221
[x1
, x2
] + �a121
[x2
, x1
] + ↵a212
[x1
, x2
] + �a112
[x2
, x1
] = 0,
de aqui tenemos que,
↵(a221
+ a212
)[x1
, x2
] + �(a121
+ a112
)[x2
, x1
] = 0
Como a221
+ a212
= 0 = a121
+ a112
, tenemos que para cualesquiera a112
, a212
2 F podemos construirun algebra de Lie 2-dimensional. Ahora debemos ver cuantas podemos conseguir no isomorfas,debemos distinguir dos casos:

14 CAPITULO 1. ALGEBRAS DE LIE
1. Si a112
= a212
= 0 el algebra sera abeliana.
2. Podemos suponer sin perdida de generalidad que a112
6= 0 (si no cambiamos el papel dex1
y x2
) entonces 0 6= [x1
, x2
] = a112
x1
+ a212
x2
, luego en este caso el algebra de Lie no esabelianas, y todas ellas son isomorfas (ver [2, Cap. 3, pag. 20]).
Con esta definicion tenemos todas las posibles algebras de Lie de dimension dos. Comopodemos observar, esta forma de construir algebras de Lie es inviable. Por ello, en esta seccion,veremos distintos tipos de construccion.
El siguiente Lema, nos muestra una construccion denominada, extension escindida nula:
Lema 1.3.1. Sea L un algebra de Lie con producto interno [a, b], 8a, b 2 L y M un subespaciovectorial. Son equivalentes:
M es un L-modulo con representacion ⇢ : L ! gl(M).
El espacio vectorial L(M) = L�⇢
M con producto hx, yi⇢
, definido de la forma,
(1) El producto de dos elementos de L es el dado por el producto interno de L, de dondeha, bi
⇢
= [a, b], si a, b 2 L.
(2) El producto de un elemento s 2 L y otro elemento m 2 M , dado en la forma:hs,mi
⇢
:= ⇢(s)(m) = �hm, si⇢
.
(3) El producto de dos elementos de M , [m,m0] = 0.
Es un algebra de Lie.
Demostracion. ) Usaremos ha, bi⇢
= ha, bi para simplificar. Para ver si L(M) es un algebrade Lie, debemos ver que se cumple la identidad de Jacobi. Para ello la condicion hx, xi
⇢
=0,8x 2 L(M) es elemental. Tomemos ternas de los posibles elementos, de L(M):
Si tomamos (x, y, z) con x, y, z 2 L, se cumple la identidad de Jacobi de forma inmediata,gracias a (1), ya que L es un algebra de Lie.
Si tomamos (x, y,m) con x, y 2 L y m 2 M , se debe cumplir que,
X
cıclica
(x,y,m)
hx, hy,mii = 0.
Veamos que aplicando (2) iteradamente y que como ⇢ es una representacion tenemos que,⇢([x, y]) = [⇢(x), ⇢(y)], entonces se cumple la anterior igualdad,
X
cıclica
(x,y,m)
hx, hy,mii = hx, hy,mii+ hy, hm,xii+ hm, hx, yii
= hx, ⇢(y)(m)i+ hy,�⇢(x)(m)i � ⇢([x, y])(m)
= ⇢(x)(⇢(y)(m))� ⇢(y)(⇢(x)(m))� ⇢(x)(⇢(y)(m))
+ ⇢(y)(⇢(x)(m)) = 0.
Si tomamos (x,m1
,m2
) con x 2 L y m1
,m2
2 M , entonces se cumple la identidad deJacobi trivialmente, gracias a (3) y a que hx,m
1
i, hx,m2
i 2 M por ser M un L-modulo.
Si tomamos (m1
,m2
,m3
) con m1
,m2
,m3
2 M se cumple la identidad de Jacobi graciasa (3).

1.3. LA CONSTRUCCION L = S �⇢
R 15
( Debemos probar que la aplicacion ⇢ es una representacion. Veamos que ⇢ es lineal,gracias a que la operacion ha, bi
⇢
del algebra L(M) es lineal, tenemos que, 8t 2 F, s 2 S,m 2 M ,
⇢(ts)(m) = hts,mi = ths,mi = t⇢(s)(m).
⇢(x+ y)(m) = hx+ y,mi = hx,mi+ hy,mi = ⇢(x)(m) + ⇢(y)(m).
Comprobamos ahora que ⇢ es un homomorfismo, entonces se debe cumplir que,
⇢([x, y]) = [⇢(x), ⇢(y)] 8x, y 2 L.
Como, ⇢([x, y]) : M ! M y [⇢(x), ⇢(y)] : M ! M , 8x, y 2 L y 8m 2 M son aplicacioneslineales, comprobar la igualdad anterior equivale a,
⇢([x, y])(m) = [⇢(x), ⇢(y)](m),
Entonces, por definicion de h·, ·i⇢
,
(a) ⇢([x, y])(m) = hhx, yi,mi 8m 2 M.
(b) [⇢(x), ⇢(y)](m) = ⇢(x)(⇢(y)(m))� ⇢(y)(⇢(x)(m)) = hx, hy,mii � hy, hx,mii.Por la identidad de Jacobi en el algebra de Lie L(M) se cumple que,
X
cıclica
(x,y,m)
hx, hy,mii = hx, hy,mii+ hy, hm,xii+ hm, hx, yii = 0.
Entonces,
hhx, yi,mi = �hhy,mi, xi � hhm,xi, yi ) hhx, yi,mi = hx, hy,mii � hy, hx,mii.
Por tanto (a) y (b) son iguales, lo que prueba que, ⇢ es una representacion.
El Lema 1.3.1 es un caso particular de un procedimiento de construccion de algebras deLie que usa derivaciones y representaciones. La descomposicion de Levi L = S �
⇢
R y larepresentacion adjunta ad
L
: S ! gl(R(L)) y el hecho de que adL
S ✓ Der(R(L)), son losingredientes basicos del siguiente Lema:
Lema 1.3.2. Sean S y R algebras de Lie, S semisimple y R resoluble con productos internos[a, b] y r · r0 respectivamente. Entonces las siguientes afirmaciones son equivalentes,
(a) R es un S-modulo con representacion ⇢ : S ! gl(L) tal que ⇢(S) ✓ Der(R).
(b) El espacio vectorial L = S �⇢
R con producto, hx, yi⇢
definido en la forma,
(1) El producto de dos elementos de S es el dado por el producto interno de S, de dondehx, yi
⇢
= [a, b], si a, b 2 S.
(2) El producto de un elemento s 2 S y r 2 R, dado en la forma: hs, ri⇢
:= ⇢(s)(r) =�hr, si
⇢
.
(3) El producto de dos elementos de R es el dado por el producto interno de R, de dondehr, r0i
⇢
= r · r0, si r, r0 2 R.

16 CAPITULO 1. ALGEBRAS DE LIE
Es un algebra de Lie. Por tanto, podemos definir el producto en este algebra de la siguienteforma, para cada s, s0 2 S y r, r0 2 R,
hs+ r, s0 + r0i⇢
= [s, s0] + ⇢(s)(r0)� ⇢(s0)(r) + r · r0.
Demostracion. ) Usaremos hx, yi⇢
= hx, yi para simplificar. Veamos que L(R) es un algebrade Lie. Para ello comprobemos que se cumple la identidad de Jacobi dado que la identidadhx, xi = 0, 8x 2 L(R) es inmediata al ser R y S de Lie. Tomemos ternas de los posibleselementos de L(R) ,
Si (a, b, c), 8a, b, c 2 S, se cumple inmediatamente gracias a (1) ya que S es un algebrade Lie.
Si (a, b, r), 8a, b 2 S y 8r 2 R, se debe dar que,
X
cıclica
(a,b,r)
ha, hb, rii = 0.
Veamos, que se cumple gracias a (1) y (2),
X
cıclica
(a,b,r)
ha, hb, rii = ha, hb, rii+ hb, hr, aii+ hr, ha, bii
= ha, ⇢(b)(r)i+ hb,�⇢(a)(r)i+ hr, [a, b]i= ⇢(a)(⇢(b)(r))� ⇢(b)(⇢(a)(r))� ⇢([a, b])(r)
===⇢ representacion
⇢(a)(⇢(b)(r))� ⇢(b)(⇢(a)(r))� [⇢(a), ⇢(b)](r)
= ⇢(a)(⇢(b)(r))� ⇢(b)(⇢(a)(r))� ⇢(a)(⇢(b)(r))
+ ⇢(b)(⇢(a)(r)) = 0.
Si (a, r, t), 8a 2 S y 8r, t 2 R, se debe dar que,
X
cıclica
(a,r,t)
ha, hr, tii = 0.
Veamos que se cumple gracias a (2) y (3),
X
cıclica
(a,r,t)
ha, hr, tii = ha, hr, tii+ hr, ht, aii+ ht, ha, rii
= ha, r · ti � hr, ⇢(a)(t)i+ ht, ⇢(a)(r)i= ⇢(a)(r · t)� r · ⇢(a)(t) + t · (⇢(a)(r))
===⇢(a) derivacion
⇢(a)(r) · t+ r · ⇢(a)(t)� r · ⇢(a)(t)
+ t · ⇢(a)(r) = 0.
Si (r, t, s) 8r, t, s 2 R, se cumple inmediatamente gracias a (3) ya que R es un algebra deLie.

1.3. LA CONSTRUCCION L = S �⇢
R 17
Por tanto, L(R) es un algebra de Lie.( Debemos ver que ⇢ es una representacion y que ⇢(S) ✓ Der(R). Sabemos que L(R)
es un algebra de Lie, probemos que ⇢ es una representacion. Para ello, veamos que ⇢ es linealgracias a que la operacion hx, yi
⇢
del algebra L(R) es lineal, tenemos que 8t 2 F, 8s 2 S y8r 2 R,
⇢(ts)(r) = hts, ri = ths, ri = t⇢(s)(r).
⇢(x+ y)(r) = hx+ y, ri = hx, ri+ hy, ri = ⇢(x)(r) + ⇢(y)(r).
Comprobamos ahora que ⇢ es un homomorfismo, para ello, se debe cumplir que,
⇢([a, b]) = [⇢(a), ⇢(b)] 8a, b 2 S.
Como, ⇢([a, b]) : R ! R y [⇢(a), ⇢(b)] : R ! R, 8a, b 2 L son aplicaciones lineales, comprobarla igualdad anterior equivale a,
⇢([a, b])(r) = [⇢(a), ⇢(b)](r)8r 2 R,
Entonces, por definicion de h·, ·i⇢
,
(a) ⇢([a, b])(r) = hha, bi, ri 8r 2 R
(b) [⇢(a), ⇢(b)](r) = ⇢(a)(⇢(b)(r))� ⇢(b)(⇢(a)(r)) = ha, hb, rii � hb, ha, rii.Por la identidad de Jacobi en el algebra de Lie L(R) se cumple que,
X
cıclica
(a,b,r)
ha, hb, rii = ha, hb, rii+ hb, hr, aii+ hr, ha, bii = 0.
Entonces,
hha, bi, ri = �hhb, ri, ai � hhr, ai, bi ) hha, bi, ri = ha, hb, rii � hb, ha, rii.Por tanto (a) y (b) son iguales, lo que prueba que, ⇢ es una representacion.
Veamos ahora, que ⇢ es una derivacion de R, para ello se debe cumplir que,
⇢(a)(r · t) = (⇢(a)(r)) · t+ r · (⇢(a)(t)), 8a 2 S y 8r, t 2 R.
Entonces por definicion de h·, ·i⇢
,
(i) ⇢(a)(r · t) = ha, hr, tii.(ii) (⇢(a)(r)) · t+ r · (⇢(a)(t)) = hha, ri, ti+ hr, ha, tii.
Por la identidad de Jacobi en el algebra de Lie L(R) se cumple que,X
cıclica
(a,r,t)
ha, hr, tii = ha, hr, tii+ hr, ht, aii+ ht, ha, rii = 0.
Entonces,
ha, hr, tii = �hr, ht, aii � ht, ha, rii= hr, ht, aii+ ht, ha, rii.
Por tanto (a) y (b) son iguales, lo que prueba que ⇢ es una derivacion.

18 CAPITULO 1. ALGEBRAS DE LIE
Comentarios 1.3.3. El Lema previo es igualmente valido si consideramos cualquier terna(S, ⇢, R) donde S y R son algebras de Lie arbitrarias y ⇢ es una representacion de S sobre R,tal que ⇢(S) ✓ DerR.
Ejemplo 8. En la literatura nos encontramos sencillas e interesantes construcciones de estetipo:
• Extension escindida nula
4 de un algebra de Lie L y un modulo M con representacion ⇢(8a, b 2 L, 8m,m0 2 M):
hs+ r, s0 + r0i⇢
= [a, b] + ⇢(a)(m0)� ⇢(b)(m).
• El algebra holomorfa de un algebra de Lie L con producto [a, b], H(L) = Der L �id
L(8d, d0 2 Der L, 8a, b 2 L, ⇢ ⌘ id , d · a = d(a)):
hd+ a, d0 + biid
= (d � d0 � d0 � d) + d(b)� d0(a) + [a, b].
• Algunas subalgebras del algebra holomorfa que son frecuentes:
(a) La extension por derivacion, F · d�id
L, donde d 2 Der L (8↵,� 2 F, 8a, b 2 L):
h↵ · d+ a,� · d+ bi⇢
= ↵ · d(b)� � · d(a) + [a, b].
(b) La extension por subalgebra de derivaciones abeliana, A �id
L, donde A es unasubalgebra abeliana de derivaciones de L (8d, d0 2 A, 8a, b 2 L):
hd+ a, d0 + bi⇢
= d(b)� d0(a) + [a, b].
La construccion L = S �⇢
R nos dice como obtener algebras de Lie a partir de algebras deLie semisimples y resolubles. Gracias al Teorema de Levi 1.1.12, esto nos proporciona todas lasde Lie no resolubles y no semisimples siempre y cuando se conozcan las clasificaciones de todaslas semisimples y resolubles. La clasificacion de las primeras sobre cuerpos algebraicamentecerrados es conocida desde principios de 1900 (caracterıstica cero). Las semisimples son sumade simples y estas son las descritas en el Ejemplo 3 La clasificacion de las resolubles, es unproblema “salvaje”que A. I. Malcev reduce en 1945 a la clasificacion de nilpotentes de acuerdocon [8]. Por tanto, al intentar obtener algebras con unas caracterısticas prefijadas utilizandoesta construccion se nos puede presentar una de las siguientes situaciones:
Que conozcamos S semisimple y una representacion R de S, ambas algebras de Lie,con R resoluble como datos. En este caso, necesitamos encontrar la(-s) aplicacion(-es)⇢ : S ! DerR, que ha(-n) de ser un homomorfismo(-s) de algebras de Lie. Por tanto, hayque calcular las derivaciones de R y construir homomorfismos. Esta situacion equivalea conocer el algebra resoluble y su algebra de derivaciones y calcular las subalgebrassemisimples dentro del algebra de derivaciones (que aparecen como subalgebras de unfactor de Levi del algebra de derivaciones).
Que conozcamos S semisimple, y una representacion ⇢ : S ! gl(V ), esto es, V es unS-modulo. En este caso, en el espacio vectorial V hay que determinar un producto binariov � w tal que v � v = 0. La linealidad de � y la condicion ⇢(S) ✓ Der (V,�), equivalena que el producto � aparezca como suma de homomorfismos de S-modulos. El productosera de la forma, U ⌦ P ! Q con (U,P,Q) recorriendo las posibles ternas de irreducibles
4Es la dada por el Lema 1.3.1.

1.3. LA CONSTRUCCION L = S �⇢
R 19
de una descomposicion fija en irreducibles del modulo V . Con todas las observacionesprevias, la ultima condicion que queda por verificar para que la construccion sea viablees, la identidad de Jacobi,
X
cıclica
(u,v,w)
= u� (v � w) + v � (w � u) + w � (u� v) = 0
Ejemplo 9. Encontrar todas las posibles estructuras de algebra de Lie que podamos dar aL = sl
2
(F)�⇢
R cuando la representacion ⇢ descompone R en la forma 2V (2) y R = R(L).Empezamos definiendo tres subespacios vectoriales U = spanFhx1
, x2
, x3
i, V = spanFhy
1
, y2
, y3
i y W = spanFhz1, z2, z3i mediante bases. Definamos en U el producto estandar delalgebra semisimple sl
2
(F), esto es, U sera factor de Levi con x1
= h, x2
= e, x3
= f . Ahora,definamos la representacion, ⇢ : (sl
2
(F) = U) ! gl(V �W ) mediante la estructura de modulosirreducibles de tipo V (2) en V y W . De acuerdo con 1.2.11 podemos suponer sin perdida degeneralidad {y
1
, y2
, y3
} = {X2, XY, Y 2} y {z1
, z2
, z3
} = {Z2, ZT, T 2}. Por ultimo, debemosdefinir un producto interno en el espacio vectorial R = V �W mediante la transveccion:
(·, ·)1
: V (2)⌦ V (2) ! V (2)
dado que por el Lema 1.2.13 apartados c) y d) es el unico producto (y es ademas antisimetrico),salvo multiplos escalares, sl
2
(F)-invariante que podemos definir sobre modulos de tipo V (2). Elproducto sobre R lo vamos a definir mediante proyecciones sobre cada una de sus componentes.
pV,V,V
: V ⌦ V ! V y pV,V,W
: V ⌦ V ! W , luego pV,V,V
= ↵(·, ·)1
y pV,V,W
= �(·, ·)1
yseran de la forma:
pV,V,V
(y1
, y2
) = ↵(X2, XY )1
= ↵
2
X2 = ↵
2
y1
pV,V,V
(y1
, y3
) = ↵(X2, Y 2)1
= ↵XY = ↵y2
pV,V,V
(y2
, y3
) = ↵(XY, Y 2)1
= ↵
2
Y 2 = ↵
2
y3
pV,V,W
(y1
, y2
) = �(X2, XY )1
= �
2
Z2 = �
2
z1
pV,V,W
(y1
, y3
) = �(X2, Y 2)1
= �ZT = �z2
pV,V,W
(y2
, y3
) = �(XY, Y 2)1
= �
2
T 2 = �
2
z3
pW,W,V
: W⌦W ! V y pW,W,W
: W⌦W ! W , luego pW,W,V
= �(·, ·)1
y pW,W,W
= �(·, ·)1
y seran de la forma:
pW,W,V
(z1
, z2
) = �(Z2, ZT )1
= �
2
Z2 = �
2
y1
pW,W,V
(z1
, z3
) = �(Z2, T 2)1
= �ZT = �y2
pW,W,V
(z2
, z3
) = �(ZT, T 2)1
= �
2
T 2 = �
2
y3
pW,W,W
(z1
, z2
) = �(Z2, ZT )1
= �
2
Z2 = �
2
z1
pW,W,W
(z1
, z3
) = �(Z2, T 2)1
= �ZT = �z2
pW,W,W
(z2
, z3
) = �(ZT, Y 2)1
= �
2
T 2 = �
2
z3
pV,W,V
: V ⌦W ! V y pV,W,W
: V ⌦W ! W , luego pV,W,V
= µ(·, ·)1
y pV,W,W
= ⌫(·, ·)1
y seran de la forma:
pV,W,V
(y1
, z2
) = µ(X2, ZT )1
= µ
2
X2 = µ
2
y1

20 CAPITULO 1. ALGEBRAS DE LIE
pV,W,V
(y1
, z3
) = µ(X2, T 2)1
= µXY = µy2
pV,W,V
(y2
, z3
) = µ(XY, T 2)1
= µ
2
Y 2 = µ
2
y3
pV,W,V
(y1
, z2
) = ⌫(X2, ZT )1
= ⌫
2
T 2 = ⌫
2
z1
pV,W,V
(y1
, z3
) = ⌫(X2, T 2)1
= ⌫ZT = ⌫z2
pV,W,V
(y2
, z3
) = ⌫(XY, T 2)1
= ⌫
2
T 2 = ⌫
2
z3
Ahora, con todos los productos proyeccion definidos, la forma general del producto en elespacio vectorial R = V � W , queda de la siguiente manera para cualquier v, v0 2 V yw,w0 2 W
(v + w)�↵,�,�,�,µ,⌫
(v0 + w0) = [v, v0] + [v, w0] + [w, v0] + [w,w0]
= pV,V,V
(v, v0) + pV,V,W
(v, v0) + pV,W,V
(v, w0) + pV,W,W
(v, w0)
� pV,W,V
(v0, w)� pV,W,W
(v0, w) + pW,W,V
(w,w0) + pW,W,W
(w,w0)
= ↵(v, v0)1
+ �(v, v0)1
+ µ(v, w0)1
+ ⌫(v, w0)1
� µ(v0, w)1
� ⌫(v0, w)1
+ �(w,w0)1
+ �(w,w0)1
.
Hay que tener en cuenta, que R descompone en dos modulos irreducibles. Ademas, Rdebe ser el radical resoluble de L y
[sl2
(F), R] = R ✓ N(L),
aplicando el Teorema 1.1.9. Por tanto, R = N(L) = R(L) debe ser algebra de Lie nilpo-tente. De la cadena R3 ✓ R2 ✓ R por tener solo dos irreducibles, llegamos a que o R2 = 0o si R2 6= 0 entonces R3 = 0. Entonces,
• Si R2 = 0, ↵ = � = � = � = µ = ⌫ = 0. Aplicando el Lema 1.3.1 tenemos el algebrade Lie extension escindida nula de sl
2
(F) y m = 2V (2).
• Si R2 6= 0 y R3 = 0. Ahora, buscamos un complemento T a R2 y tenemos R = T�R2
con T ⇠= R2 ⇠= V (2). Sin perdida de generalidad, podemos suponer que T = V . Por loque, el unico producto no nulo es [V, V ] ✓ W que se corresponde con p
V,V,W
= �(·, ·)1
.En este caso, s.p.g. ↵ = � = � = µ = ⌫ = 0 y � 6= 0 (si � = 0, tendrıniamos queR2 = 0). (De forma analoga si hubiesemos tomado T = W y R2 = V , salvo que eneste caso ↵ = � = � = µ = ⌫ = 0, con � 6= 0). Veamos que de esta forma, se cumplela identidad de Jacobi, para ello tomaremos ternas de los posibles elementos de L,El producto nos queda entonces: (v+w)�
�
(v0 +w0) y (R,�(·, ·)1
) es un algebra deLie ya que el producto es antisimetrico y R3 = 0 dice que la identidad de jacobi secumple trivialmente. Gracias al Comentario 1.2.14 ⇢(U) ✓ Der(R,�
�
). Ası, el Lema1.3.2 garantiza estructura de Lie en L = U �
⇢
R = sl
2
(F) � V �W . Por ultimo, elproducto en este algebra de Lie queda de la siguiente forma para cualquier s, s0 2 S,v, v0 2 V y w,w0 2 W :
[s+ v + w, s0 + v0 + w0] = [s, s0] + [s, v0] + [s, w0] + [v, s0] + [v, v0]
+ [v, w0] + [w, s0] + [w, v0] + [w,w0]
= [s, s0] + s · v0 + s · w0 � s0 · v � s0 · w + �(v, v0)1

1.4. RESULTADOS DE ESTRUCTURA 21
1.4. Resultados de estructura
Terminamos el Capıtulo 1 con una serie de resultados que nos permitiran desarrollar lasconstrucciones del Capıtulo 2.
Para cualquier derivacion interna de un algebra de Lie, adL
x, el nucleo de esta aplicacionlineal
Ker adL
x = {a 2 L : [x, a] = 0} = CL
(x),
es un ideal que se dice centralizador del elemento x en L. Dado que los ideales resolubles y nilpo-tentes son caracterısticos y ad
L
x 2 Der L, disponemos de las aplicaciones lineales (restriccionesde ad
L
x) adR(L)
x : R(L) ! R(L) y adN(L)
x : N(L) ! N(L). Los nucleos de estas aplicacionesson los centralizadores en R(L) y N(L) respectivamente del elemento x, y se describen como:Ker ad
R(L)
x = CR(L)
(x) = R(L) \ CL
(x) y Ker adN(L)
x = CN(L)
(x) = N(L) \ CL
(x).
Proposicion 1.4.1. Sea L un algebra de Lie no resoluble en caracterıstica cero, S un factor deLevi, ⇢ : S ! gl(L) la representacion adjunta y L
0
= {x 2 L : [S, x] = 0} = CL
(S). Entonces:
a) ⇢(S) ✓ Der L y S, R(L) y N(L) son submodulos de L.
b) L = L1
� L0
donde L0
es el submodulo suma de todos los submodulos 1-dimensionales
de L y L1
es el submodulo suma de todos los modulos no triviales de L.
c) Para todo x 2 L0
, adL
x 2 HomS
(L,L), adR(L)
x 2 HomS
(R(L), R(L)) y adN(L)
x 2Hom
S
(N(L), N(L)).
d) Si V es un S-submodulo irreducible de L, x 2 L0
y adL
(x)(V ) = [x, V ] = {[x, v] : v 2V } 6= 0, el subespacio [x, V ] es un submodulo irreducible isomorfo con V .
e) L0
es una subalgebra de L y [L0
, L1
] ✓ L1
.
Demostracion. Para simplificar tomaremos que R(L) = R y que N(L) = N .
a) Para que ⇢(S) ✓ Der L, se debe cumplir que para cada a 2 S,
1. ⇢(a) : L ! L sea lineal, 8t 2 F, x 2 L, b 2 S,
⇢(ta)(x) = [ta, x] = t[a, x] = t⇢(a)(x),
⇢(a+ b)(x) = [a+ b, x] = [a, x] + [b, x] = ⇢(a)(x) + ⇢(b)(x).
Luego como se cumple lo anterior, ⇢ es lineal.
2. ⇢(a) 2 Der L, esto es, 8x, y 2 L, ⇢(a)([x, y]) = [⇢(a)(x), y] + [x, ⇢(a)(y)], como⇢(a) = ad
L
a, como ⇢ es un homomorfismo de algebras de Lie,
• ⇢(a)([x, y]) = [a, [x, y]].
• [⇢(a)(x), y] + [x, ⇢(a)(y)] = [[a, x], y] + [x, [a, y]].
Como L es un algebra de Lie, se debe cumplir la identidad de Jacobi,
X
cıclica
(a,x,y)
[a, [x, y]] + [x, [y, a]] + [y, [a, x]] = 0
) [a, [x, y]] = [x, [a, y]] + [[a, x], y].
Lo que prueba que ⇢(a) es derivacion.
Veamos ahora que,

22 CAPITULO 1. ALGEBRAS DE LIE
• S es un S-submodulo de L. Sabemos que S ✓ L es un subespacio vectorial de L.Para ver que es S-submodulo se debe cumplir que 8a 2 S, a · S ✓ S. Veamos queesto es cierto a · S = ⇢(a)(S) = [a, S] ✓ S pues S es subalgebra. Por tanto, S es unS-submodulo de L.
• R es un S-submodulo de L, R ⇢ L. Veamos, la accion sobre los elementos de R,
⇢(a)(R) ✓ ⇢(S)(R) = [S,R] ✓ R,
por ser R ideal de L. Por tanto, R es un S-submodulo de L.
Notar que, para N la prueba es analoga a R pues tambien es un ideal de L. Luego Ntambien es un S-submodulo de L.
b) L0
es un submodulo de L (a · L0
= ⇢(a)(L0
) = {0} ✓ L0
), luego tiene un complementoen L, L = L
0
� T . Observar que 8V irreducible de T , V es no trivial, luego T ✓ L1
. Ası,L1
= L0
\ L1
� T y L0
\ L1
= 0 pues si V ✓ L0
\ L1
y V irreducible, entonces V ✓ L1
luego es no trivial, y V ✓ L0
luego es trivial, lo que es una contradiccion. Los submodulosirreducibles triviales son 1-dimensionales luego su suma es L
0
.
c) Debemos ver que,
• adL
x : L ! L es un S-homomorfismo con x 2 L0
, como ya sabemos, la aplicacon eslineal por ser derivacion. Nos queda ver si cumple,
adL
x(s · l) = s · adL
x(l) 8l 2 L, s 2 S. (1.1)
� adL
x(s · l) = adL
x([s, l]) ===ad derivacion
[adL
x(s), l] + [s, adL
x(l)] = [[x, s], l] +
[s, [x, l]] = [s, [x, l]], pues [x, s] = 0.
� s · adL
x(l) = [s, [x, l]].
Como las anteriores igualdades coinciden, adL
x 2 HomS
(L,L).
• Observar que [x,R] ✓ R, y [x,N ] ✓ R 8x 2 L por ser ideales de L. Ası las aplicacionesad
R
x : R ! R y adN
x : N ! N son las restricciones de adL
x a R y N . Como adL
xes lineal y cumple (2.1), con radical resoluble y nilradical S-modulos. Tenemos quead
R
x 2 HomS
(R,R) y adN
x 2 HomS
(N,N).
d) Como x 2 L0
, adL
x 2 HomS
(L,L) por c), y podemos considerar su restriccion a V ,de la siguiente forma,
adV
x : adL
x�
�
�
V
: V ! L.
Ahora bien, como Ker adV
x = {v 2 V : [x, V ] = 0}, es un submodulo y V irredu-cible, sus unicos submodulos son {0} y es V . Ası, Ker ad
V
x = {0} o V , la segundaposibilidad nos lleva a que ad
V
x = {0} 8v 2 V , entonces adV
x ⌘ 0, lo que contradicela hipotesis. Por tanto, Ker ad
V
x = {0} y la aplicacion adV
x es inyectiva. Conside-ramos ad
V
x con conjunto de llegada ImadV
x = [x, V ], que es un submodulo de L.Entonces, la aplicacion ad
V
x : V ! [x, V ] es inyectiva y suprayectiva por tanto, esbiyectiva, entonces V ⇠= [x, V ] y es irreducible por serlo V .
e) Por ser L0
subespacio vectorial de L, solo tenemos que comprobar que [L0
, L0
] ✓ L0
.Ahora [L
0
, L0
] = spanFh[x, y] : x, y 2 L0
i y s · [x, y] = [s ·x, y]+ [x, s ·y] = 0, 8s 2 S,lo que queda probado el contenido.
Por otro lado, si x 2 L0
adL1x = ad
L
x�
�
�
L1
: L1
! L es un homomorfismo de
L-modulos. Si V es un submodulo cualquiera de L1
, o bien [x, V ] = 0 2 L1
o

1.4. RESULTADOS DE ESTRUCTURA 23
aplicando c) V ⇠= [x, V ] de donde [x, V ] es no trivial, y por tanto [x, V ] ✓ L1
.Ası [x, L
1
] ✓ L1
8x 2 L0
. Lo que prueba la afirmacion.
Proposicion 1.4.2. Sea L un algebra de Lie no resoluble y no simple en caracterıstica cero eindescomponible, S un factor de Levi y ⇢ : S ! gl(L) la representacion adjunta. Si R(L)
0
=R(L) \ L
0
y N(L)0
= N(L) \ L0
, entonces:
a) ⇢ es una representacion fiel, luego CS
(L) = {x 2 S : [x, L] = 0} = 0.
b) R(L)0
es una subalgebra del radical resoluble y contiene a N(L)0
. Ademas,[R(L)
0
, R(L)0
] ✓ N(L)0
.
c) Si el radical resoluble R(L) es abeliano, R(L)0
= 0.
d) Cualquier submodulo que sea un complemento del nilradical en el radical resoluble estacontenido en L
0
. Esto es, R(L) = N(L)� T y T es un submodulo, entonces T ✓ R(L)0
.
Demostracion. Para simplificar, tomaremos que R(L) = R y que R = R1
�R0
.
a) Para ver que ⇢ sea una representacion fiel, se debe cumplir que Ker ⇢ = 0.
Ker ⇢ = {s 2 S : ⇢(s) ⌘ 0}= {s 2 S : ⇢(s)(x) = 0, 8x 2 L} = {s 2 S : [s, x] = 08x 2 L}= {s 2 S : [s, L] = 0} = S \ Z(L) := C
S
(L).
Supongamos que Ker ⇢ 6= 0, y escribimos CS
(L) = Ker ⇢ = T ES. Como T es un ideal deS algebra semisimple, existe un ideal U de S tal que S = T �U , L = S�R = (T �U)�Ry [T, L] = 0, por tanto, T ✓ Z(L) luego es un ideal.
[U �R,L] = [U �R, T ] + [U �R,U ] + [U �R,R].
Estudiamos cada sumando por separado,
[U �R, T ] = 0 ✓ U �R,
[U �R,R] ✓R ideal
U �R.
Por tanto, U �R es ideal de L. Como L indescomponible y T 6= 0 tenemos que U �R =0. Por tanto, L = T = S. Entoces como L es indescomponible L = S, simple, porindescomponibilidad en L. Pero esto contradice la hipotesis de que L es no simple. Luego,Ker ⇢ = 0, y ⇢ es fiel.
b) R = R0
� R1
, con R0
= {x 2 R : [S, x] = 0} = R \ L0
y como R y L0
subalgebras(ver Proposicion 1.4.1) luego R
0
es subalgebra por ser interseccion de ellas. Por otro lado,R2
0
= R0
y
[R0
, R0
] ✓ [R,R0
] ✓[R,R]=R
2R2 \R
0
✓T
a2.1.8
N \R0
= N0
c) Supongamos que R0
6= 0, entonces R = R1
� R0
. Agrupamos la parte no trivial de L enM = S �R
1
, entonces L = M �R0
. Veamos su M y R0
son ideales de L,

24 CAPITULO 1. ALGEBRAS DE LIE
[M,L] = [M,M ] + [M,R0
] =====[M,R
0
] = 0R
0
S-trivialR abeliano
R1
es S-modulo
[M,M ] = [S � R1
, S � R1
] = [S, S]✓
S
+
[S,R1
]✓
R1
+ [R1
, R1
]=
0
✓ R1
� S = M .
[R0
, L] = [R0
, S] + [R0
, R1
] + [R0
, R0
] = 0 ✓ R0
, y con los mismos argumentos queantes.
Luego tanto M como R0
son ideales no nulos de L, lo que es una contradiccion pues L esindescomponible. Por tanto, R
0
= 0.
d) N ✓ R y como N es un ideal, entonces N es un S-modulo. Por completa reducibilidad derepresentacion dada por S, podemos descomponer R como suma directa de submodulos,R = N � T . Para que T ✓ R
0
, debemos probar que [s, T ] = 0, 8s 2 S. Ahora, [s, T ] ✓[s,R] ✓
T
a2.1.8
N y [s, T ] ✓T S-mod
N(L), entonces [s, T ] = N \ T = 0, luego [S, T ] = 0
) T ✓ R0
.

Capıtulo 2
´
Algebras de Lie 9-dimensionales
En este capıtulo, vamos a presentar el estudio que hemos realizado del artıculo de Turkowski[12] (ver Anexo de esta memoria). En este artıculo se clasifican las algebras de Lie reales in-descomponibles, no resolubles y no semisimples de dimension 9. De acuerdo con el Teorema deLevi, estas algebras deben tener radical resoluble y factor de Levi no triviales. La indescompo-nibilidad y la dimension 9 llevan de forma inmediata en el trabajo a que, salvo isomorfismos, elfactor de Levi y el radical resoluble son de dimensiones 3 y 6 respectivamente. Sobre el cuerporeal, solo dos posibilidades no isomorfas se dan para el factor de Levi si tiene dimension 3 (ver[7, Capıtulo 1]): las matrices 2 ⇥ 2 de traza 0, sl
2
(R) y el algebra ortogonal de matrices 3 ⇥ 3o
3
(R) (ver Ejemplo 3). La clasificacion final proporciona, salvo isomorfismos, un total de 63familias algebras de Lie reales. La tecnica que se emplea es el uso de la clasificacion de Mu-barakzyanov [9] de las algebras resolubles de dimension 6 y las representaciones de dimension 6 de sl
2
(R) y 3⇥ 3 o
3
(R). El artıculo comenta los resultados sin dar una prueba explıcita ydescribe las algebras mediante sus constantes de estructura.
Las algebras de Lie estudiadas por Turkowski se pueden construir en la forma general dadapor el Lemma 1.3.2 que tratamos en el Capıtulo 1:
L = sl
2
(R)�⇢
R y L = o
3
(R)�⇢
R.
Usando el estudio de representaciones V (d) de sl
2
(R) y de homomorfismos de modulos (pro-ductos sl
2
(R)-invariantes) mediante transvecciones (·, ·)k
: V (d) ⌦ V (s) ! V (r) de la Seccion1.2.11, en este capıtulo hemos reconstruido la clasificacion de 15 de las familias de la listadada por Turkowski sobre un cuerpo de caracterıstica cero arbitrario. En el caso real, ambasclasificaciones encajan.
2.1. Resultados especıficos
De la teorıa general de estructura vista en las secciones 1.3 y 1.4, recordamos las notacionesbasicas y listamos aquellas propiedades que usaremos con frecuencia en la construccion dealgebras de Lie 9-dimensionales de la Seccion 2.2.
Notaciones Basicas 2.1.1. Sea L = S � R(L) la descomposicion de Levi de un algebra deLie L con factor de Levi S 6= 0, radical resoluble R(L) y nilradical N(L):
NB1 R0
= R(L)0
y N0
= N(L)0
son los submodulos triviales mas grandes dentro del radicalresoluble y del nilradical de L respectivamente. Esto es, T
0
= {x 2 T (L) : s · x = 0 8s 2S}, con T (L) = R(L) o N(L).
25

26 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
NB2 R1
= R(L)1
y N1
= N(L)1
, es el modulo suma de todos los irreducibles no triviales delradical resoluble y del nilradical de L respectivamente.
NB3 L = L0
�L1
, donde L0
es el submodulo trivial mas grande de L, luego [S,L0
] = 0 y L1
esel modulo suma de todos los modulos irreducibles no triviales del radical resoluble y delnilradical de L, en particular, S ✓ L
1
.
Propiedades de Estructura 2.1.2. Sea L = S � R(L) la descomposicion de Levi de unalgebra de Lie con factor de Levi S 6= 0, radical resoluble R(L) y nilradical N(L):
PE1 Los terminos de las series derivadas de R(L) y central descendente de N(L) son S-submodulos.
PE2 N(L) = N1
�N0
y R(L) = R1
�R0
.
PE3 N1
= R1
.
PE4 R0
= N0
� T0
, con T0
submodulo complemento y R2
0
✓ N0
✓ R0
. En particular, R0
esuna subalgebra de L y N
0
un ideal de R0
.
PE5 8x 2 N0
, la aplicacion adR(L)
x : R(L) ! N(L) ✓ R(L) es nilpotente.
PE6 8x 2 R0
�N0
, la aplicacion adR(L)
x : R(L) ! N(L) ✓ R(L) es no nilpotente.
PE7 8 V submodulo irreducible de N1
y 8x 2 R0
, adV
x = [x, V ] es un submodulo de N1
. Esmas, ad
V
x : V ! [x, V ], es un homomorfismo de modulos. Ası, adV
x 2 HomS
(V, [x, V ]),y por irreducibilidad, tenemos que:
• o bien Ker adV
x = V , en cuyo caso, [x, V ] = 0;
• o bien Ker adV
x = CV
(x) = 0 y en este caso, V y [x, V ] son modulos isomorfos.Ademas en el caso particular de que F sea algebraicamente cerrado o S = sl
2
(F) si[x, V ] ✓ V entonces ad
V
x = ↵ · IV
para algun ↵ 6= 0.
PE8 8x 2 R0
, los subespacios N1
y R0
son adL
x-invariantes y, si algun x 2 R0
�N0
cumpleque ad
R0 x es nilpotente y N1
6= 0, siempre existe un submodulo irreducible V de N1
talque [x, V ] 6= 0. Ademas, en el caso particular de que F sea algebraicamente cerrado oS = sl
2
(F), si [x, V ] ✓ V , se tiene que adV
x = ↵ · IV
para algun ↵ 6= 0.
PE9 8 V submodulo irreducible de N1
y 8x 2 N0
, o [x, V ] = 0 o si 0 6= [x, V ], N contiene almenos otro modulo irreducible isomorfo con V y distinto de V .
Demostracion. La afirmacion PE1 se cumple porque los terminos de las series son ideales.PE2 y PE3 son inmediatas y PE4 es consecuencia de la completa reducibilidad de las repre-sentaciones de algebras de Lie semisimples y el Teorema 1.1.9. La propiedad PE5 se deducede la Proposicion 1.1.10 y el Teorema 1.1.9; este Teorema tambien prueba PE6.
Para probar PE7, comprobamos primero que [x, V ] es un S-modulo. Por un lado, sabemosque es un subespacio de V y nos queda probar que 8s 2 S, s · [x, v] 2 [x, V ], 8v 2 V . Veamos,
s · [x, v] ===def ·
[s, [x, v]] ==I.Jacobi
[[s, x], v] + [x, [s, v]] = [x, s · v].
Como s · v 2 V , [x, s · v] 2 [x, V ], por tanto, [x, V ] es un S-modulo
1.Ahora, el modulo V es irreducible, luego sus unicos submodulos son {0} y V . Por lo que
tenemos las siguientes posibilidades,
1En la Proposicion 1.4.1 damos una prueba alternativa a esta parte PE7

2.1. RESULTADOS ESPECIFICOS 27
1. Ker adV
x = V , entonces tendremos la aplicacion nula, esto es, adV
x(V ) = 0 = [x, V ].
2. Ker adV
x = {0}, entonces la aplicacion es inyectiva. Como el conjunto imagen es exacta-mente Imad
V
x = [x, V ] entonces adV
x es tambien suprayectiva. Por ello, nos encontra-mos frente a un isomorfismo lineal. Aplicando Proposicion 1.4.1 ad
V
x es un homomorfismode S-modulos, entonces por los Lemas de Schur 1.2.10 y 1.2.12 tenemos que ad
V
x = ↵IV
,para algun ↵ 2 F. Veamos que ↵ 6= 0, pues si ↵ = 0, ad
V
x ⌘ 0 luego Ker adV
x = V 6= {0}lo que es una contradiccion.
Por ultimo, veamos que [x, V ] ✓ N1
, en el caso en que [x, V ] = 0 es claro, y si [x, V ] 6= 0,[x, V ] ⇠= V luego, dim [x, V ] = dimV > 1 y [x, V ] ✓ N luego [x, V ] ✓ N
1
.
Veamos ahora PE8. La primera parte es consecuencia de PE4 y PE7. Sabemos por PE6,que cuando x 2 R
0
� N0
, adR
x : R ! R es no nilpotente, luego si adR0x : R
0
! R0
esnilpotente, ad
N1x : N1
! N1
no lo puede lo que prueba la segunda afirmacion. La ultima partees consecuencia de PE7.
Probaremos finalmente PE9 sabemos por PE5 que si x 2 N0
✓ N , entonces adR
x : R ! Nes nilpotente, luego ad
V
x : V ! [x, V ] ✓ N tambien lo sera, pues V ✓ R. Suponemos que[x, V ] 6= 0, aplicamos PE7 y entonces sabemos que V ⇠= [x, V ] ✓ N
1
,
Si [x, V ] 6= V , entonces queda probada la afirmacion.
Si [x, V ] = V , entonces por PE7, tenemos que adV
x = ↵IV
para algun ↵ 6= 0. Entonces:
(adV
x)k : v ! ↵v ! ↵2v ! . . . ! ↵kv.
Luego (adV
x)k = ↵kIV
6= 0 8k 2 N y 0 6= ↵ 2 F, lo que es una contradiccion pues adV
xes nilpotente. Por tanto, esta posibilidad no se da.
Representaciones Basicas 2.1.3. De acuerdo con el apartado de Representaciones irreduci-bles de sl
2
(F) 1.2.11 los modulos irreducibles que usaremos los podemos definir a traves de unespacio vectorial de polinomios homogeneos F[X,Y ], en las variables X e Y . Para describir losproductos entre el algebra sl
2
(F) y los modulos irreducibles, usaremos el modelo de derivaciones.Consideramos la base estandar de sl
2
(F) = spanFhx1
, x2
, x3
i, con productos,
[x1
, x2
] = 2x2
, [x1
, x3
] = �2x3
, [x2
, x3
] = x1
.
Donde,
x1
= h = X@
@X� Y
@
@Y,
x2
= e = X@
@Y,
x3
= f = Y@
@X.
Para cada n � 0, con n 2 N, el Cuadro 2.1 recoge la accion del algebra anterior sobre losdistintos modulos irreducibles que vamos a usar en la Seccion 2.2.

28 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
Cuadro 2.1: sl2
(F)-modulos de dimension 5
n V (n) = hv0
, . . . , vn
i sl
2
(F)-accion sobre V (n)
0 X
1 X,Y
2 X
2, XY, Y
2
3 X
3, X
2Y,XY
2, Y
3
4 X
4, X
3Y,X
2Y
2, XY
3, Y
4
5 X
5, X
4Y,X
3Y
2, X
2Y
3, XY
4, Y
5
Productos Basicos dados por transvecciones 2.1.4. Listamos los productos invariantesen el Cuadro 2.2 que podemos emplear en la construccion de las algebras en este capıtulo.Ademas, si alguno de los que necesitamos no aparece querra decir que es nulo.
Cuadro 2.2: Productos antisimetricos sl2
(F)-invariantes
d ⇤2V (d) (d, s) ⇤2V (d) ! V (s)
0 0 (0, s) 8s 0
1 V (0) = Fw0
(1, 0) (X,Y )1
= w0
(1, 1) 0
(1, 2) 0
2 V (2) (2, 2)(X2, XY )
1
= ↵Z
2
2
,(X2, Y 2)1
= ↵ZT ,
(XY, Y 2)1
= ↵T
2
2
(2, 0) 0
(2, 1) 0
3 V (4)� V (0) (3, 1) 0
4 V (6)� V (2) (4, 0) 0

2.2. CONSTRUCCIONES DE ALGEBRAS 29
Cuadro 2.3: Productos sl2
(F)-invariantes
(d, s) V (d)⌦ V (s) V (r) V (d)⌦ V (s) ! V (r)
(1, 2) V (3)� V (1) V (0) 0
(1, 0) V (1) V (2) 0
(2, 0) V (2) V (2) 0
2.2. Construcciones de algebras
Una vez introducida la notacion, los (posibles) productos invariantes entre el algebra se-misimple sl
2
(F) y el radical resoluble R, y entre el propio radical (que dependeran de la des-composicion de R); enunciaremos y demostraremos un Lema y tres Teoremas. El Lema da lasdescomposiciones en modulos del radical de las algebras indescomponibles de dimesnion 9 quequeremos construir. Los Teoremas dividen las algebras que hemos clasificado (de entre las deTurkowski) de la siguiente forma: el Teorema 2.2.2 el radical de las algebras no tiene ningunmodulo trivial, sin embargo, en el Teorema 2.2.4 posee un modulo trivial y en el ultimo, elTeorema 2.2.6 esta compuesto por tres modulos triviales.
Lema 2.2.1. Sea L un algebra de Lie con factor de Levi S ⇠= sl
2
(F) tal que el radical resolubleR(L), tiene dimension 6. Si la accion adjunta de S sobre R(L) no es trivial, la descomposiciondel radical como suma de modulos irreducibles para la subalgebra S es de uno de los siguientestipos:
(i) Si R(L) no contiene modulos triviales: V (5), V (3)� V (1), 2V (2), 3V (1).
(ii) Si R(L) contiene algun modulo trivial: V (4)� V (0), V (2)� V (1)� V (0), V (3)� 2V (0),2V (1)� 2V (0), V (2)� 3V (0) o V (1)� 4V (0).
En particular, la descomposicion en S-modulos de L es la de R(L) a la que hay que anadir unmodulo de tipo V (2), esto es, irreducible 3-dimensional.
Demostracion. Sabemos que L = S � R(L), denotamos por R = R(L). La accion de S sobreL, es la dada por la representacion adjunta restringida a los elementos de S, esto es, s · x =ad
L
s(x) = [s, x]. Como S es algebra de Lie simple, no tiene ideales propios, luego es un S-modulo irreducible de dimension tres y por tanto debe ser de tipo V (2). El radical resoluble Res un S-modulo por ser ideal de L, tiene dimension seis, y descompone como R = R
0
�R1
.Distingamos el caso en que, R
0
= 0, R1
descompone como suma finita de submodulosirreducibles. Sea W
1
el de mayor dimension, R1
= nW1
�W , con 0 6= n el numero de veces queaparece W
1
en la descomposicion y W el complemento que descompone en suma de irreduciblesde dimension mayor o igual que dos.
Si dimW1
= 6, entonces n = 1 y W = 0 luego R = V (5).
Si dimW1
= 4, entonces n = 1 y dimW = 2, y tenemos queW = V (1) y R = V (3)�V (1).
Si dimW1
= 3, entonces si n = 1, dimW = 3, luego la unica posibilidad es que W = V (2),y llegamos a que R = 2V (2).

30 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
Si dimW1
= 2, entonces n = 3 y W = 0, por tanto, R = 3V (1).
Ahora, veamos que ocurre cuando R0
6= 0. En este caso, R = R0
�R1
, donde 0 6= n = dimR0
que nos indica que el numero de submodulos irreducibles triviales que contiene la descomposicionde R, y R
1
sera el submodulo complemento que descompone como suma finita de submodulosirreducibles de dimension mayor o igual a dos. Como R no es trivial, R
0
6= R, luego n 5. Peron no puede ser igual a 5 pues dimR = 6 y R no trivial. Entonces,
Si n = 4, R0
= 4V (0) luego dimR1
= 2, la unica posibilidad es que R1
= V (1), yR = 4V (0)� V (1).
Si n = 3, R0
= 3V (0) luego dimR1
= 3, la unica posibilidad es que R1
= V (2), yR = 3V (0)� V (2).
Si n = 2, R0
= 2V (0), y dimR1
= 4. Entonces,
O bien R1
es irreducible y en ese caso R1
= V (3) y R = 2V (0)� V (3).
O bien R1
es reducible y sin modulos triviales entonces R1
= 2V (1) y R = 2V (0)�2V (1).
Si n = 1, R0
= V (0), luego dimR1
= 5. Entonces,
O bien R1
= V (4), y por tanto R = V (0)� V (4).
O bien R1
= V (2)� V (1) es reducible y sin modulos triviales entonces R = V (0)�V (2)� V (1).
Teorema 2.2.2. (Laura Soria, 2015) Las algebras de Lie indescomponibles de dimension 9
sobre el cuerpo F, con factor de Levi isomorfo a sl
2
(F) y con radical R(L) resoluble sin modulos
triviales, son isomorfas a una de las algebras Lk
con k = 1, 2, 3, 4, 5 que aparecen en la siguiente
lista. Las algebras L⇤k
= Sk
� Rk
se describen mediante una base {xi
}1i9
, donde los tres
primeros elementos {x1
, x2
, x3
} constituyen una base estandar del factor de Levi Sk
, de este
modo:
[x1
, x2
] = 2x2
, [x1
, x3
] = �2x3
, [x2
, x3
] = x1
.
El subespacio Rk
, generado por el resto de los elementos, es el radical resoluble de L⇤k
. Este
ideal es abeliano si k 6= 5. El ideal R↵
5
es nilpotente y no abeliano con (R↵
5
)3 = 0 6= (R↵
5
)2.
(a) L1
= S1
� R1
, con R1
= �9
i=4
F · xi
y productos, [x1
, x4
] = 5x4
, [x1
, x5
] = 3x5
, [x1
, x6
] =x6
, [x1
, x7
] = �x7
, [x1
, x8
] = �3x8
, [x1
, x9
] = �5x9
, [x2
, x5
] = x4
, [x2
, x6
] = 2x5
,
[x2
, x7
] = 3x6
, [x2
, x8
] = 4x7
, [x2
, x9
] = 5x8
, [x3
, x4
] = 5x5
, [x3
, x5
] = 4x6
, [x3
, x6
] = 3x7
,
[x3
, x7
] = 2x8
, [x3
, x8
] = x9
.
(b) L2
= S2
� R2
, con R2
= R2,3
� R2,1
, R2,3
= �7
i=4
Fxi
y R2,1
= Fx8
� Fx9
y productos
no nulos, [x1
, x4
] = 3x4
, [x1
, x5
] = x5
, [x1
, x6
] = �x6
, [x1
, x7
] = �3x7
, [x1
, x8
] = x8
,
[x1
, x9
] = �x9
, [x2
, x5
] = x4
, [x2
, x6
] = 2x5
, [x2
, x7
] = 3x6
, [x2
, x9
] = x8
, [x3
, x4
] = 3x5
,
[x3
, x5
] = 2x6
, [x3
, x6
] = x7
, [x3
, x8
] = x9
.
(c) L3
= S3
�R3
, con R3
= R3,2
�R3,2
, con R3,2
= �6
i=4
Fxi
y R3,2
= �9
j=7
Fxj
y productos
no nulos, [x1
, x4
] = 2x4
, [x1
, x6
] = �2x6
, [x1
, x7
] = 2x7
, [x1
, x9
] = �2x9
, [x2
, x5
] = x4
,
[x2
, x6
] = 2x5
, [x2
, x8
] = x7
, [x2
, x9
] = 2x8
, [x3
, x4
] = 2x5
, [x3
, x5
] = x6
, [x3
, x7
] = 2x8
,
[x3
, x8
] = x9
.

2.2. CONSTRUCCIONES DE ALGEBRAS 31
(d) L4
= S4
� R4
, con R4
= R4,1
�R4,1
�R4,1
, con R4,1
= Fx4
� Fx5
, R4,1
= Fx6
� Fx7
y R4,1
= Fx8
� Fx9
y productos no nulos, [x1
, x4
] = x4
, [x1
, x5
] = �x5
, [x1
, x6
] = x6
,
[x1
, x7
] = �x7
, [x1
, x8
] = x8
, [x1
, x9
] = �x9
, [x2
, x5
] = x4
, [x2
, x7
] = x6
, [x2
, x9
] = x8
,
[x3
, x4
] = x5
, [x3
, x6
] = x7
, [x3
, x8
] = x9
.
(e) L↵
5
= S5
�R↵
5
, con R↵
5
= R5,2
�R5,2
, con R5,2
= �6
i=4
Fxi
y R5,2
= �9
j=7
Fxj
y productos
no nulos, [x1
, x4
] = 2x4
, [x1
, x6
] = �2x6
, [x1
, x7
] = 2x7
, [x1
, x9
] = �2x9
, [x2
, x5
] = x4
,
[x2
, x6
] = 2x5
, [x2
, x8
] = x7
, [x2
, x9
] = 2x8
, [x3
, x4
] = 2x5
, [x3
, x5
] = x6
, [x3
, x7
] = 2x8
,
[x3
, x8
] = x9
, [x4
, x5
] = ↵
2
x7
, [x4
, x6
] = ↵x8
, [x5
, x6
] = ↵
2
x9
.
Demostracion. Sin perdida de generalidad podemos escribir la descomposicion como L = sl
2
(F)�R, donde S
k
= sl
2
(F) = hx1
, x2
, x3
i como describe el enunciado. Las algebras salvo isomorfismoaparecen mediante la construccion de R como sl
2
(F)-modulo. En este caso no hay modulostriviales luego R
0
= 0 y usando PE2 y PE3 tenemos que N = R. Luego R nilpotente (esdecir, 9k > 1, t.q. Rk = 0 y Rk�1 6= 0 ). Por nilpotencia, R2 6= R y R2 es un ideal de R y portanto, R2 es un modulo aplicando PE1. Por el Teorema 1.2.6, los modulos de las algebras deLie semisimples son completamente reducibles, es decir, descomponen como suma directa demodulos irreducibles. Entonces, R = R2 � W con W sl
2
(F)-modulo de R. De acuerdo con elLema 2.2.1 podemos distinguir los siguientes casos,
Si L = sl
2
(F)�V (5), sabemos que R = V (5) irreducible, luego la unica posibilidad es queR2 = 0, por lo que nos encontramos frente a un algebra que se construye como extensionescindida nula como indica el Lema 1.3.1. Por tanto, tomando como base estandar deV (5) = {x
k
}9k=4
= {X5, X4Y,X3Y 2, X2Y 3, XY 4, Y 5}. Tenemos que [xi
, xk
] = 0 para4 i, k 9 y usando las representaciones Basicas 2.1.3 (ver Cuadro 2.1), llegamos alalgebra descrita en (a).
Si L = sl
2
(F)� V (3)� V (1), sabemos que R = V (3)� V (1). Como R nilpotente, existendos posibilidades,
A) R2 = 0, entonces tenemos un algebra construida por una extension escindida nulacomo viene definido en el Lema 1.3.1. Por tanto, si tomamos las bases estandares deV (3) = {x
k
}7k=4
= {X3, X2Y,XY 2, Y 3}, y V (1) = {x8
, x9
} = {Z, T}, tenemos que[x
i
, xk
] = 0 para 4 i, k 9 y usamos la representacion Basica 2.1.3 (ver Cuadro2.1), llegamos al algebra descrita en (b).
B) R2 6= 0, R2 debe ser irreducible, y como R3 R2, R3 = 0. Tenemos dos posibilidades:
B1) R2 = V (3). Por tanto, R = V (3) � V (1) = R2 �W. Analizamos los productosentre los sumandos R2 y W del radical, [R2, R2 � W ] ✓ [R2, R] = R3 = 0 ypor tanto, R2 = [R,R] = [W,W ] 6= 0. El producto de elementos de W vendradeterminado como multiplo escalar no nulo de una transveccion antisimetrica,
(·, ·)k
: V (1)⌦ V (1) ! V (3).
Por Productos 2.1.4 (ver Cuadro 2.2), sabemos que el unico homomorfismosl
2
(F)-invariante es el trivial, luego R2 = 0, lo cual es una contradiccion. Portanto, no existe un algebra L = sl
2
(F)� V (3)� V (1) con R2 = V (3).
B2) R2 = V (1). Por tanto, R = V (1) � V (3) = R2 � W . Como en el caso B1),[W,W ] = R2 6= 0, producto dado por un multiplo escalar no nulo de una trans-veccion antisimetrica,
(·, ·)k
: V (3)⌦ V (3) ! V (1).

32 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
Por Productos 2.1.4(ver Cuadro 2.2), sabemos que el unico homomorfismo sl2
(F)-invariante es el trivial, luego R2 = 0, lo que vuelve a ser una contradiccion. Portanto, no existe ningun algebra L = sl
2
(F)� V (3)� V (1), con R2 = V (1).
Si L = sl
2
(F)� 2V (2), sabemos que R = 2V (2). Como R nilpotente, existen la siguientesposibilidades,
A) R2 = 0, entonces W = 2V (2) y tenemos un algebra de Lie construida por una exten-sion escindida nula como indica el Lema 1.3.1. Si tomamos una base estandar de V (2)por cada copia de este modulo {x
k
}6k=4
= {X2, XY, Y 2} y {xi
}9k=7
= {Z2, ZT, T 2}tenemos que [x
i
, xk
] = 0 con 4 i, k 9. Finalmente usando las representacionesBasicas 2.1.3 (ver Cuadro 2.1) llegamos al algebra descrita en (c).
B) R2 6= 0, entonces R2 = V (2), y R3 = 0. Por lo que tenemos que, R = R2 � W =V (2)� V (2) con el siguiente producto, [R2, R2] = 0, [R2,W ] = 0 y [W,W ] = R2 6= 0.Como este es el unico producto no nulo que obtenemos, calculamos su valor mediantetransvecciones. Definimos bases estandares para W = {x
i
}6i=4
= {X2, XY, Y 2} yR2 = {x
k
}9k=7
= {Z2, ZT, T 2}. El producto que queremos calcular viene dado porun multiplo escalar no nulo de una transveccion antisimetrica,
(·, ·)1
: V (2)⌦ V (2) ! V (2),
descrita en 2.1.4 (ver Cuadro 2.2). Esto es: ↵(X2, XY )1
= ↵
2
Z2, ↵(X2, Y 2)1
= ↵ZYy ↵(XY, Y 2)
1
= ↵
2
T 2 y llegamos al algebra descrita en (e)
Si L = sl
2
(F)� 3V (1) sabemos que R = 3V (1). Como R nilpotente, existen las siguientesposibilidades,
A) R2 = 0, entonces W = 3V (1) y tenemos un algebra de Lie, construida por unaextension escindida nula como indica el Lema 1.3.1. Tomando una base estandarde V (1) para cada copia (un total de tres), V (1) = {x
4
, x5
} = {X,Y }, V (1) =
{x6
, x7
} = {Z, T} y V (1) = {x8
, x9
} = {a, b} y usando las representaciones Basicas2.1.3 (ver Cuadro 2.1) llegamos al algebra descrita en (d).
B) R2 6= 0, entonces estamos frente a una de estas posibilidades,
B1) R2 = V (1), como R nilpotente y R2 irreducible, entonces R3 = 0. Luego tenemosque R = R2 � W = V (1) � 2V (1), con el siguiente producto [R2, R2] = 0,[R2,W ] = 0, [W,W ] = R2 6= 0. El producto debe venir dado por un multiploescalar no nulo de una transveccion antisimetrica:
(·, ·)k
: V (1)⌦ V (1) ! V (1).
Desde 2.1.4 (ver Cuadro 2.2) un producto de este tipo debe ser el trivial. Portanto, no podemos construir un algebra L = sl
2
(F) � 3V (1) con R2 = V (1) yR3 = 0.
B2) R2 = 2V (1), luego R/R2 ⇠= W tiene que ser un L-modulo de tipo V (1). Ahorabien, R nilpotente, entonces R3 = 0 o R3 = V (1). La cadena R4 R3 R2 =2V (1) nos indica que R4 = 0, luego
[R2, R2] = [R2, [R,R]] = [[R2, R], R] ✓ R4 = 0.
Esto es, R2 es abeliano. R = R2 � W , R2 = [R2,W ] + [W,W ], como en B1)
tenemos que [W,W ] = 0 pues los productos V (1) ⌦ V (1) ! V (1) son nulos, dedonde R2 = [R2,W ] = R3, lo que es una contradiccion, por tanto, no podemosconstruir este algebra.

2.2. CONSTRUCCIONES DE ALGEBRAS 33
Por tanto, el caso B) no puede darse.
Veamos que todas las algebras de Lie obtenidas son indescomponibles. Supongamos queuna de las algebras de la lista, L
i
con i = 1, 2, 3, 4, 5, es descomponible. Esto quiere decir queLi
= I1
� I2
, con I1
, I2
ideales de Li
y I1
, I2
6= Li
, 0.En este caso, como los factores de Levi de L
i
son isomorfos a sl
2
(F), la unica posibilidad esque I
1
sea no resoluble y I2
sea resoluble (si I1
, I2
son resolubles, entonces L es resoluble y esono ocurre; y tampoco pueden ser los dos no resolubles pues ya obliga a que la parte semisimplede L
i
sea de dimension mayor o igual que seis).Al ser I
1
no resoluble, contara con una parte no nula semisimple, S1
(isomorfa a una subalge-bra del factor de Levi sl
2
(F) de Li
) y otra resoluble que sera su radical RI1 . Ası, I
1
= S1
�RI1
y, como S1
6= 0 y semisimple, S1
es isomorfo al algebra sl
2
(F) de Li
y RI1 ✓ R(L
i
). Por otrolado, I
2
es un ideal resoluble de Li
, luego I2
= RI2 ✓ R(L
i
). Al ser Li
descomponible, tenemosque es suma directa de ideales, de donde [I
1
, I2
] = 0, entonces L2
i
= I21
� I22
. Todas las algebrasde la lista cumplen que L2
i
= Li
. Por tanto, L2
i
= I21
� I22
= I1
� I2
, y como I2j
✓ Ij
, entoncesI22
= I2
; pero I2
es resoluble y por tanto I22
6= I2
= I22
lo cual nos lleva a una contradiccion.Luego, todas las algebras de la lista son indescomponibles dado que suponer descomponibilidadnos lleva a una contradicion.
Comentarios 2.2.3. En el teorema previo, las algebras de Lie tienen radical resoluble nilpo-tente y aparecen como extensiones escindidas nulas (radical abeliano, construccion del Lema1.3.1) de un modulo sl
2
(F) a excepcion del caso L5
. La notacion que hemos empleado es L⇤i
,ya que estas algebras no poseen en su radical ningun modulo trivial, i muestra el orden deaparicion en el transcurso de la demostracion y ⇤ nos indica el parametro del que depende unade las algebras.
Las algebras L1
a L4
son las que aparecen en la clasificacion de Turkowski (en el orden dado)con las etiquetas L
9,59
, L9,60
, L9,61
, L9,63
. El algebra L2
5
es isomorfa a L9,62
cuando el cuerpoF es algebraicamente cerrado. Pero si F = R no esta tan claro, pues si ↵ > 0 tomando comobases:
x4
=
r
2
↵x4
, x5
=
r
2
↵x4
yx6
=
r
2
↵x6
x7
=2
↵x7
, x8
=2
↵x8
yx9
=2
↵x9
,
entonces L↵
5
⇠= L9,52
. Pero en el caso en que ↵ < 0 el isomorfismo no es evidente 2.
Teorema 2.2.4. (Laura Soria, 2015) Las algebras de Lie indescomponibles de dimension 9sobre un cuerpo F, con factor de Levi isomorfo a sl
2
(F) y con radical R(L) resoluble, con un
modulo trivial de dimension uno, son isomorfas a una de las algebras L⇤1,k
con k = 1, 2, 3, 4que aparecen en la siguiente lista. Las algebras L⇤
1,k
= Sk
� Rk
, se describen mediante una
base {xi
}1i9
, donde los tres primeros elementos {x1
, x2
, x3
} constituyen una base estandar
del factor de Levi Sk
, de este modo,
[x1
, x2
] = 2x2
, [x1
, x3
] = �2x3
, [x2
, x3
] = x1
.
El subespacio Rk
, generado por el resto de los elementos es el radical resoluble de L⇤1,k
. Este
ideal es no nilpotente si k 6= 4. Ademas, si k = 2, 3, 4, Rk
descompone como Rk
= Rk1
� Rk0
,
donde Rk1
= Rk1,2
� Rk1,1
con Rk1,2
= �6
i=4
Fxi
Sk
-modulo de tipo V (2) y Rk1,1
= �7
i=8
Fxi
Sk
-modulo de tipo V (1); y Rk0
= Fx9
un Sk
-modulo trivial. Ası estas algebras comparten los
productos no nulos:
2Pendiente de estudio.

34 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
[x1
, x4
] = 2x4
, [x1
, x6
] = �2x6
, [x1
, x7
] = x7
, [x1
, x8
] = �x8
,
[x2
, x5
] = x4
, [x2
, x6
] = 2x5
, [x2
, x8
] = x7
, (2.1)
[x3
, x4
] = 2x5
, [x3
, x5
] = x6
, [x3
, x7
] = x8
.
(a) L1,1
= S1
� R1
, con R1
= R1,4
� R1,0
, donde R11
= �8
i=4
Fxi
, es un S1
-modulo de
tipo V (4), y R10
= Fx9
es un S1
-modulo trivial de tipo V (0). Con productos no nulos,
[x1
, x4
] = 4x4
, [x1
, x5
] = 2x5
, [x1
, x7
] = �2x7
, [x1
, x8
] = �4x8
, [x2
, x5
] = x4
, [x2
, x6
] =2x
5
, [x2
, x7
] = 3x6
, [x2
, x8
] = 4x7
, [x3
, x4
] = 4x5
, [x3
, x5
] = 3x6
, [x3
, x6
] = 2x7
, [x3
, x7
] =x8
, [x4
, x9
] = x4
, [x5
, x9
] = x5
, [x6
, x9
] = x6
, [x7
, x9
] = x7
, [x8
, x9
] = x8
.
(b) L1,2
= S2
�R2
, con productos no nulos (que completan los descritos en ( 2.1)), [x7
, x9
] =x7
, [x8
, x9
] = x8
.
(c) Lp
1,3
= S3
� R3
(p 2 F arbitrario), con productos no nulos (que completan los descritos
en ( 2.1)), [x4
, x9
] = x4
, [x5
, x9
] = x5
, [x6
, x9
] = x6
, [x7
, x9
] = px7
, [x8
, x9
] = px8
.
(d) L1,4
= S4
�R4
, con productos no nulos (que completan los descritos en ( 2.1)), [x7
, x8
] =x9
.
Demostracion. Escribimos la descomposicion de Levi L = sl
2
(F) � R donde S = sl
2
(F) =hx
1
, x2
, x3
i viene dada por una base estandar como describe el enunciado. En este caso, ladimension del modulo trivial R
0
, es uno. Usamos PE2 y PE3 de Propiedades 2.1.2 y tenemosque R = R
1
� R0
= N1
� R0
. Como dimR0
= 1 y N0
✓ R0
, entonces N0
= 0 , R 6= N oN
0
= R0
, R = N ; en el primer caso el radical resoluble es no nilpotente y en el segundo loes. De acuerdo con el Lema 2.2.1 podemos distinguir los siguientes casos,
Caso R = V (4)� V (0)
L = sl
2
(F)�V (0)�V (4), N1
= V (4), R = N1
�R0
y R0
= V (0), ahora, debemos distinguirsi R es o no nilpotente,
A) R no nilpotente, luego N R, y por tanto N = N1
y N0
= 0 (Propiedades 2.1.2). ComoN es nilpotente, N2 N , dado que N2 es un ideal de N , entonces N2 es un sl
2
(F)-modulo (Propiedades 2.1.2). Por el Teorema 1.2.6, los modulos de las algebras de Liesemisimples son completamente reducibles, es decir, descomponen como suma directa demodulos irreducibles. Entonces, N = N2 �W , con W submodulo. Pero N = V (4) que esirreducible, y N2 6= N , entonces, N2 = 0. Ahora bien, como R no es nilpotente, R2 6= 0y R2
0
✓ N0
= 0 y [R0
, N1
] ✓ N1
(PE4 y PE8 de Propiedades 2.1.2). Por tanto,
[V (0), V (0)] = 0, [V (0), V (4)] ✓ N = V (4), [V (4), V (4)] ==N
2=0
0.
Calcularemos el unico posible producto no nulo que nos queda: R0
⌦N1
! N1
. Para ello,por PE8 de Propiedades 2.1.2, si V (0) = R
0
= F ·x9
tenemos que [v, x9
] = ↵v, 8v 2 N =N
1
= V (4) y 0 6= ↵ 2 F. Sin perdida de generalidad podemos tomar ↵ = 1, pues si hacemos
el cambio x09
= 1
↵
x9
, tenemos que [v, x09
] =
v,1
↵x9
�
=1
↵[v, x
9
] =1
↵↵v = v. Por tanto, si
tomamos una base estandar {xi
}8i=4
paraN1
= V (4), {xi
}8i=4
= {X4, X3Y,X2Y 2, XY 3, Y 4},con productos [x
i
, xj
] con 1 i 3 y 4 j 9, no nulos definidos en el Cuadro 2.1, ylos productos [x
i
, x9
] = xi
, con 4 i 8, estaremos frente al algebra L1,1
descrita en (a).(El algebra L
1,1
es de Lie porque los productos estan dados por transvecciones.)

2.2. CONSTRUCCIONES DE ALGEBRAS 35
B) R nilpotente, entonces N = R. Observamos la cadena, R3 R2 R, donde Rk es sl2
(F)-modulo (aplicamos PE1 de Propiedades 2.1.2). Como no hay mas que dos componentesirreducibles, o bien R2 = 0 o en caso de que R2 6= 0 tenemos que R3 = 0. Ahora bien,
• R2 = 0, no es posible pues entonces N0
y N1
� sl
2
(F) serıan ideales de L, pues
[N0
, L] ====N
0
trivialN abeliano
0 ✓ N0
,
[N1
, L] ✓N
1
moduloN abeliano
N1
.
Por lo que L serıa descomponible.
• En el caso R2 6= 0, R3 = 0; descomponemos R = R2 � W es suma de modulos ytenemos dos posibilidades,
1. R2 = V (4) y W = V (0). Veamos los productos entre el radical,
[R2, R2] ✓ [R,R2] = R3 = 0
[R2,W ] ✓ [R2, R] = R3 = 0
[W,W ] ✓ [R,R] = R2 6= 0
Ahora, por medio de las transvecciones, calculamos el producto,
(·, ·)k
: V (0)⌦ V (0) ! V (4),
que por el Cuadro 2.2, sabemos que el unico homomorfismo sl
2
(F)-invariante,es el trivial, luego R2 = 0, lo cual es una contradiccion.
2. R2 = V (0) y W = V (4). Veamos los productos dentro del radical,
[R2, R2] = 0, [W,R2] = 0, [W,W ] ✓ [R,R] = R2 6= 0.
Ahora, por medio de las transvecciones, calculamos el producto,
(·, ·)k
: V (4)⌦ V (4) ! V (0),
que por el Cuadro 2.2, sabemos que el unico homomorfismo sl
2
(F)-invariante esel trivial, luego R2 = 0, lo cual es una contradiccion.
Por tanto, no hay posibilidad de encontrar un algebra de radical resoluble nilpotente condescomposicion R = V (0)� V (4).
Caso R = V (2)� V (1)� V (0)
L = sl
2
(F)�V (2)�V (1)�V (0), N1
= V (1)�V (2), con R0
= V (0), y R = N1
�R0
. Ahora,debemos distinguir si R es o no nilpotente.
A) R no nilpotente, entonces N = N1
= V (1) � V (2), luego N0
= 0. Como N nilpotente,N2 N , y N2 es un ideal, entonces N2, es un sl
2
(F)-modulo y N = N2 � W , con Wsl
2
(F)-modulo. Como N es reducible, entonces debemos distinguir,

36 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
1. N2 = 0, entonces N = V (1) � V (2). Estudiemos los productos entre elementos elradical (como R no es nilpotente, R2 6= 0 y R2
0
✓ N0
= 0 y [R0
, N1
] ✓ N1
por PE4y PE8 de Propiedades 2.1.2),
[V (0), V (0)] = 0, [N,N ] = 0, [R0
, N ] ✓ N 6= 0.
Entonces 0 6= R2 = [R0
, N ]. Tomamos bases estandares para los distintos modulosque tenemos, R
0
= V (0) = F · x9
= {X}, V (1) = F · x7
� F · x8
= {X,Y } yV (2) = �6
i=4
F · xi
= {X2, XY, Y 2} y, por PE7 y PE8 de Propiedades 2.1.2 tenemosque
[v, x9
] = �v 8v 2 V (1), [w, x9
] = ↵w 8w 2 V (2).
Distinguiremos los distintos valores de las constantes ↵,� 2 F.
• Si ↵ = 0, entonces,
� � = 0, en este caso todos los productos entre el radical, serıan nulos, y portanto R2 = 0, lo que es una contradiccion pues R es no nilpotente.
� � 6= 0, con � 2 F tendrıamos los productos [xi
, x9
] = �xi
, con i = 7, 8. Sinperdida de generalidad podemos tomar � = 1, pues si cambiamos la base deV (0) = Fx
9
= Fx09
, con x09
= 1
�
x9
, entonces, tenemos que los productos,
[xi
, x9
] =
xi
,1
�x9
�
=1
�[x
i
, x9
] =1
��x
i
= xi
.
Por tanto, cuando tomemos un algebra de Lie, L = sl
2
(F)�V (2)�V (1)�V (0)con R = V (2)�V (1)�V (0), y R no nilpotente. Con base estandar de sl
2
(F),con productos no nulos [x
i
, xj
] con 1 i 3 y 4 j 9, definidos en elCuadro 2.1, y los productos [x
7
, x9
] = x7
, [x8
, x9
] = x8
. Estaremos frente alalgebra L
1,2
descrita en (b).
• Si ↵ 6= 0, entonces sin perdida de generalidad podemos tomar ↵ = 1, pues sicambiamos la base de V (0) = Fx
9
= Fx09
, con x09
= 1
↵
x9
, entonces, tenemos quelos productos,
[xi
, x9
] =
xi
,1
↵x9
�
=1
↵[x
i
, x9
] =1
↵↵x
i
= xi
, 4 i 6.
� � = 0, entonces cuando tomamos un algebra de Lie, L = sl
2
(F) � V (2) �V (1)�V (0), con R no nilpotente, con productos no nulos entre los elementosde sl
2
(F) y el radical, definidos en el Cuadro 2.1, y los productos [xi
, x9
] =xi
, i = 4, 5, 6. Estaremos frente al algebra de Lie L0
1,3
descrita en (c) conp = 0.
� � 6= 0, entonces, cuando tomemos un algebra de Lie, L = sl
2
(F) � V (2) �V (1) � V (0), con R no nilpotente. Los productos no nulos son [x
i
, x9
] =xi
, i = 4, 5, 6, [xj
, x9
] = �xj
, i = 7, 8, y los productos tomando la baseestandar de sl
2
(F) definidos en el Cuadro 2.1. Estaremos frente al algebrade Lie L�
1,3
descrita en (c) con p 6= 0.
(Las algebras L1,2
, L�
1,3
son de Lie porque los productos estan dados por transvec-ciones.)
2. N2 6= 0, como N es reducible, entonces tenemos dos opciones

2.2. CONSTRUCCIONES DE ALGEBRAS 37
• N2 = V (1), como N nilpotente y N2 irreducible, entonces N3 = 0. Luego,
N2 = [N,N ] = [V (1), V (1)] + [V (1), V (2)] + [V (2), V (2)],
analicemos cada producto por separado,
[V (1), V (1)] = [N2, N2] ✓ [N2, N ] = N3 = 0 ) [V (1), V (1)] = 0.
[V (1), V (2)] ✓ [N2, N ] = N3 = 0 ) [V (1), V (2)] = 0.
[V (2), V (2)] ✓ [N,N ] = N2 = V (1).
Calculemos mediante transvecciones este producto,
(·, ·)k
: V (2)⌦ V (2) ! V (1),
que por el Cuadro 2.2 sabemos que el unico homomorfismo sl
2
(F)-invariante esel trivial. Ası, N2 = 0 y, por tanto, llegamos a una contradiccion. Por lo que nopodemos encontrar un algebra de Lie L = sl
2
(F)�R con R = V (2)�V (1)�V (0)no nilpotente, con N2 6= 0 y N2 = V (1).
• N2 = V (2), como N nilpotente y N2 irreducible, entonces N3 = 0. Vemos que,
N2 = [N,N ] = [V (1), V (1)] + [V (1), V (2)] + [V (2), V (2)],
y, por las mismas razones que en el anterior caso,
[V (2), V (2)] = 0, [V (1), V (2)] = 0, [V (1), V (1)] ✓ N2 = V (2).
Calculemos mediante transvecciones este producto,
(·, ·)k
: V (1)⌦ V (1) ! V (2),
que por el Cuadro 2.2 sabemos que el unico homomorfismo sl
2
(F)-invariante esel trivial. Ası, N2 = 0 y, por tanto, llegamos a una contradiccion. Por lo que nopodemos encontrar un algebra de Lie con R = V (2)�V (1)�V (0) no nilpotente,con N2 6= 0 y N2 = V (2).
Por lo que llegamos a la conclusion de que cuando R = V (2) � V (1) � V (0) yL = sl
2
(F)�R, con R no nilpotente, el nilradical N siempre es abeliano.
B) R nilpotente, entonces N = R. Por nilpotencia, R2 R, y R2 ideal de R, por tanto, R2
es un sl
2
(F)-modulo. Luego R = W �R2. Ahora veamos,
• Si R2 = 0 entonces V (0) es ideal de L y N1
� sl
2
(F) tambien. Esto no es posible,pues entonces L serıa descomponible.
• R2 6= 0, como R nilpotente, R3 R2, como R3 ideal de R2 y entonces R3 es unsl
2
(F)-modulo, entonces R2 = T �R3, por lo que tenemos que distinguir:
Caso R3= 0
Veamos los productos que nos podemos encontrar en el radical:
[W,W ] ✓ R2, [W,R2] ✓ [R,R2] = R3 = 0, [R2, R2] ✓ [R,R2] = R3 = 0.
Luego solamente hay un producto que puede ser no nulo que es [W,W ] ✓ R2. Esmas, [W,W ] = R2 6= 0. Para obtener un algebra de Lie, necesitamos un productoantisimetrico p : ⇤2W ! R2 que tenemos que dar mediante transvecciones (produc-tos sl
2
(F)-invariates). Como R2 6= 0, p tiene que ser no nulo. En la descomposicionR = W �R2 se pueden dar dos situaciones dependiendo de que R2 sea irreducible ono.

38 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
� R2 irreducible, entonces W = P � Q con P,Q irreducibles y ⇤2W = ⇤2P �⇤2Q�P ⌦Q. El producto p vendra dado como combinacion lineal de productosde transvecciones correspondientes a cada una de los componentes ⇤2P,⇤2Q yP ⌦Q de ⇤2W sobre R2, esto es:
(·, ·)k
: ⇤2P ! R2, (·, ·)k
: ⇤2Q ! R2, (·, ·)k
: P ⌦Q ! R2.
Veamos los casos que se pueden dar:
1. Si R2 = V (2), luego W = V (0) � V (1) con P = V (0) y Q = V (1). En estecaso necesitamos transvecciones
(·, ·)k
: ⇤2V (0) ! V (2), (·, ·)k
: ⇤2V (1) ! V (2), (·, ·)k
: V (0)⌦V (1) ! V (2).
Por los Cuadros 2.2 y 2.3, sabemos que todos estos homomorfismos sl
2
(F)-invariates son triviales. Luego llegamos a una contradiccion pues R2 6= 0.Por tanto, no podemos construir un algebra de Lie, L = sl
2
(F) � R conR = V (2)� V (1)� V (0) nilpotente, con R2 = V (2) y R3 = 0.
2. R2 = V (1), luego W = V (0) � V (2), con P = V (0) y Q = V (2). En estecaso necesitamos transvecciones
(·, ·)k
: ⇤2V (0) ! V (1), (·, ·)k
: ⇤2V (2) ! V (1), (·, ·)k
: V (0)⌦V (2) ! V (1).
Por los Cuadros 2.2 y 2.3, sabemos que todos estos homomorfismos sl
2
(F)-invariates son el trivial. Luego llegamos a una contradiccion pues R2 6= 0.Por tanto, no podemos construir un algebra de Lie, L = sl
2
(F) � R conR = V (2)� V (1)� V (0) nilpotente, con R2 = V (1) y R3 = 0.
3. R2 = V (0), luego W = V (2) � V (1), con P = V (2) y Q = V (1). En estecaso necesitamos transvecciones
(·, ·)k
: ⇤2V (2) ! V (0), (·, ·)k
: ⇤2V (1) ! V (0), (·, ·)k
: V (2)⌦V (1) ! V (0).
De acuerdo con los Cuadros 2.2 y 2.3, el unico homomorfismo sl2
(F)-invarianteno trivial es, (·, ·)
1
: ⇤2V (1) ! V (0). Tomando ahora {x1
, x2
, x3
} baseestandar de sl
2
(F), describiendo con bases estandares V (0) = Fx09
= hXi yV (1) = Fx
7
� Fx8
= hX,Y i y usando la base estandar de V (2), {xi
}6i=4
={X2, XY, Y 2}, con productos no nulos definidos en el Cuadro 2.1 y anadien-do [x
7
, x8
] = ↵x09
con ↵ 6= 0 obtenemos la unica posibilidad de construir unalgebra de Lie. Definimos ahora x
9
= ↵x09
como elemento generador de V (0)y estaremos frente al algebra de Lie L
1,4
descrita en (d).
� R2 = P �Q reducible, luego W es irreducible y el producto no nulo p : ⇤2W !R2 lo tendremos que definir con transvecciones
(·, ·)k
: ⇤2W ! P, (·, ·)k
: ⇤2W ! Q.
Veamos los casos que se nos plantean,
1. R2 = V (1)� V (0) luego W = V (2) y necesitamos (·, ·)k
: ⇤2V (2) ! V (1) y(·, ·)
k
: ⇤2V (2) ! V (0). Por el Cuadro 2.2, sabemos que son triviales, luegollegamos a una contradiccion pues R2 6= 0. Por tanto, cuando tomemos unalgebra L = sl
2
(F)�V (2)�V (1)�V (0), con R2 = V (0)�V (1) con R3 6= 0,no podremos encontrar un algebra de Lie.

2.2. CONSTRUCCIONES DE ALGEBRAS 39
2. R2 = V (2) � V (0), luego W = V (1) y necesitamos (·, ·)k
: ⇤2V (1) ! V (2)y (·, ·)
k
: ⇤2V (1) ! V (0). Que por el Cuadro 2.2, sabemos que el unicoproducto sl
2
(F)-invariante es (·, ·)k
: ⇤2V (1) ! V (0). Pero veamos que estasituacion no se puede dar, ya que , como R3 = 0 = [R,R2], R2 = [W,W ] =V (0), lo que nos dice queR2 serıa 1-dimensional, una contradicion. Por tanto,no es posible que R2 = V (0) � V (2). Entonces, no podemos encontrar unalgebra de Lie cuando L = sl
2
(F)�V (2)�V (1)�V (0), con R2 = V (0)�V (2),con R nilpotente.
3. R2 = V (1) � V (2), luego W = V (0) y como R2 = [W,W ], entonces obte-nemos que R2 = 0 pues W es de dimension 1. Esta posibilidad tampoco sepuede dar.
Caso R3 6= 0
Por tanto, R4 = 0 (tenemos R4 ⇢ R3 ⇢ R2 ⇢ R y R tiene 3 componentes irredu-cibles). Como R es nilpotente, R = N , N
0
= V (0) y N1
= V (1) � V (2), podemosdescomponer en suma de submodulos R = W � R2 = W � T � R3; los sumodulosW,T y R3 son irreducibles y R2 = T �R3). Veamos los productos que nos podemosencontrar en el radical,
[W,W ] ✓ [R,R] = R2,
[T, T ] ✓ [R2, R2] ✓ [R2, [R,R]] ✓ [[R2, R], R] = [R3, R] = R4 = 0,
[R3, R3] ✓ [R,R3] = R4 = 0,
[W,T ] ✓ [R,R2] = R3,
[W,R3] ✓ R4 = 0,
[T,R3] ✓ [R2, R3] ✓ [R,R3] = R4 = 0.
Luego, los unicos productos que pueden ser no nulos son,
[W,W ] ✓ R2, [W,T ] ✓ R3.
Para obtener el algebra, los productos los tenemos que dar mediante transvecciones(productos sl
2
(F)-invariantes)
(·, ·)k
: W ⌦W ! T ; (·, ·)k
: W ⌦W ! R3; (·, ·)k
: W ⌦ T ! R3.
Ahora, veamos los distintos casos que se nos pueden presentar,
� R2 = V (1) � V (0), con W = V (2), T = V (1) y R3 = V (0). Necesitamostransvecciones:
(·, ·)k
: V (2)⌦ V (2) ! V (1), V (0); (·, ·)k
: V (2)⌦ V (1) ! V (0).
Sabemos por los Cuadros 2.2 y 2.3 que los unicos productos sl
2
(F)-invariantesson el triviales, luego llegamos a una contradiccion pues R2 6= 0. Por tanto, estaposibilidad no se puede dar.
� R2 = V (2) � V (0), W = V (1), T = V (2) y R3 = V (0). Necesitamos transvec-ciones:
(·, ·)k
: V (1)⌦ V (1) ! V (2), V (0); (·, ·)k
: V (1)⌦ V (2) ! V (0).
Por los Cuadros 2.2 y 2.3 los unicos productos son triviales, luego es una con-tradiccion pues R3 6= 0. Por tanto, esta posibilidad no se da.

40 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
� R2 = V (1)� V (2), con W = V (0), T = V (1) y R3 = V (2). Vemos que tampocose da esta posibilidad, pues necesitamos transvecciones
(·, ·)k
: V (0)⌦ V (0) ! V (1), V (2); (·, ·)k
: V (0)⌦ V (1) ! V (2).
Por los Cuadros 2.2 y 2.3 los unicos productos son triviales por lo que este caso,tampoco se da.
� R2 = V (0) � V (1), con W = V (2), T = V (0) y R3 = V (1). Necesitamostransvecciones
(·, ·)k
: V (2)⌦ V (2) ! V (0), V (1); (·, ·)k
: V (2)⌦ V (0) ! V (1).
Por los Cuadros 2.2 y 2.3 los unicos productos son triviales por lo que, como enlos casos anteriores, no es posible.
� R2 = V (0) � V (2), con W = V (1), T = V (0) y R3 = V (2). Necesitamostransvecciones
(·, ·)k
: V (1)⌦ V (1) ! V (0), V (2); (·, ·)k
: V (1)⌦ V (0) ! V (2).
Por los Cuadros 2.2 y 2.3 los unicos productos son triviales. Tampoco es posible.
� R2 = V (2) � V (1), con W = V (0), T = V (2) y R3 = V (1). Necesitamostransvecciones
(·, ·)k
: V (0)⌦ V (0) ! V (2), V (1); (·, ·)k
: V (0)⌦ V (2) ! V (1).
Por los Cuadros 2.2 y 2.3 los unicos productos son triviales. Tampoco se puededar.
Por lo que concluimos que cuando R nilpotente, con R = V (0)�V (1)�V (2), nuncase da el caso en que R3 6= 0.
Para terminar, falta comprobar que todas las algebras de Lie obtenidas son indescompo-nibles. Razonando igual que en el Teorema 2.2.2, suponemos que las algebras de la lista sondescomponibles y por ello, L⇤
1,k
= I1
� I2
, con I1
, I2
ideales de L⇤1,k
y I1
, I2
6= L⇤1,k
, 0. DondeI1
es no resoluble e I2
es resoluble. Al ser L⇤1,k
descomponible, tenemos que es suma directa deideales, de donde [I
1
, I2
] = 0.Comprobemos entonces si el algebra L
1,1
= sl
2
(F)� V (4)� V (0), con R = V (4)� V (0) esindescomponible. Supongamos que es descomponible, y entonces cumple [I
1
, I2
] = 0, tenemosdos posibilidades:
1. O bien I1
= sl
2
(F) � V (4) y I2
= V (0). Basta tomar, x4
2 I1
y x9
2 I2
, entonces,[x
4
, x9
] = x4
6= 0, luego [I1
, I2
] 6= 0, lo que es una contradiccion.
2. O bien I1
= sl
2
(F)� V (0) y I2
= V (4). Ahora tomando, x4
2 I1
y x9
2 I2
, llegamos a lamisma contradiccion.
En ambos casos llegamos a una contradiccion, que viene de suponer que I1
y I2
son ideales deL1,1
. Por tanto, L1,1
es indescomponible. Comprobemos ahora si las algebras L0
1,3
y Lp
1,3
sonindescomponibles. Supongamos que son descomponibles, luego [I
1
, I2
] = 0, tenemos la siguientesposibilidades:
1. Cuando I1
= sl
2
(F) � V (0) e I2
= V (2) � V (1), o I1
= sl
2
(F) � V (1) I2
= V (0) � V (2),o I
1
= sl
2
(F) � V (0) � V (1) y I2
= V (2) o I1
= sl
2
(F) � V (1) � V (2) y I2
= V (0). Enestos casos, basta tomar x
4
y x9
pertenecientes a uno de los dos ideales, y llegamos a unacontradiccion, pues [x
4
, x9
] = x4
6= 0.

2.2. CONSTRUCCIONES DE ALGEBRAS 41
2. Cuando I1
= sl
2
(F)� V (1) y I2
= V (0)� V (2). Tomamos x1
2 I1
y x4
2 I2
, y entonces[x
1
, x4
] = 2x4
6= 0, lo que es una contradiccion.
3. Cuando I1
= sl
2
(F)� V (0)� V (2) y I2
= V (1). Entonces tomando x1
2 I1
y x7
2 I2
con[x
1
, x7
] = x7
6= 0, llegamos a una contradiccion.
Luego las algebras de Lie L0
1,3
y Lp
1,3
, son indescomponibles.Ahora, veamos que el algebra L
1,2
es indescomponible. Supongamos que no lo es, luego[I
1
, I2
] = 0, tenemos las siguientes posibilidades:
1. Cuando I1
= sl
2
(F)� V (0 y I2
= V (2)� V (1) o I1
= sl
2
(F)� V (1) y I2
= V (0)� V (1) oI1
= sl
2
(F) � V (1) � V (2) y I2
= V (0) entonces tomando x7
y x9
, pertenecientes a unode los dos ideales, llegamos a que [x
7
, x9
] 6= 0, lo que es una contradiccion.
2. Cuando I1
= sl
2
(F)� V (2) y I2
= V (0)� V (1) o I1
= sl
2
(F)� V (0)� V (2) y I2
= V (1)entonces basta tomar x
1
y x7
pertenecientes a uno de los dos ideales, y llegaremos a unacontradiccion pues [x
1
, x7
] = x7
6= 0.
3. Cuando I1
= sl
2
(F) � V (0) � V (1) y I2
= V (2), tomamos x1
2 I1
y x4
2 I2
y entonces[x
1
, x4
] = 2x4
6= 0, lo que es una contradiccion.
Por tanto, el algebra L1,2
es indescomponible.Por ultimo comprobemos que el algebra L
1,4
es indescomponible, sigamos la misma estra-tegia que anteriormente, luego veamos las posibilidades de I
1
e I2
:
1. Cuando I1
= sl
2
(F)� V (0) y I2
= V (2)� V (1) o I1
= sl
2
(F)� V (1) y I2
= V (2)� V (0)o I
1
= sl
2
(F)� V (0)� V (2) y I2
= V (1) basta tomar x1
y x4
perteneciente a uno de losdos ideales, y obtenemos que [x
1
, x4
] = 2x4
6= 0, lo que es una contradiccion.
2. Cuando I1
= sl
2
(F)� V (2) y I2
= V (0)� V (1) o I1
= sl
2
(F)� V (0)� V (1) y I2
= V (2)tomamos x
1
y x7
pertenecientes a uno de los dos ideales, y obtenemos que [x1
, x7
] = x7
6=0, lo que es una contradiccion.
3. Cuando I1
= sl
2
(F) � V (1) � V (2) y I2
= V (0), I2
es un ideal de L, pues cumple que[I
1
, I2
] = 0, pero I1
no puede ser un ideal, pues todo ideal es siempre una subalgebra,y sin embargo I
1
, no cumple que [I1
, I1
] ✓ I1
, basta tomar x7
, x8
2 I1
y tenemos que[x
7
, x8
] = x9
2 I2
. Luego, aunque I2
es un ideal, I1
no lo es.
Por tanto, L1,4
es indescomponible. Por lo que podemos concluir, que todas las algebras de Lielistadas son indescomponibles.
Comentarios 2.2.5. En el Teorema previo, las construcciones de las algebras de Lie obtenidas,se consiguen de acuerdo a lo definido en el Lema 1.3.2.
La notacion que hemos empleado es L⇤1,k
, donde 1 muestra el numero de modulos trivialesque tiene el algebra, k es el orden de aparicion en el transcurso de la demostracion, y el ⇤aparecera en las algebras que dependan de algun parametro.
Cuando la dimR0
= 1, solo obtenemos un algebra de Lie nilpotente, el algebra L1,4
, queen la clasificacion de Turkowski se corresponde con L
9,58
. Las algebras L1,1
, L1,2
, Lp
1,3
y L0
1,3
,son algebras de Lie no nilpotentes y por tanto con dimN
0
= 0, que en la tabla de Turkowskise corresponden con L
9,55
, L9,57
, Lp
9,56
y L0
9,56
respectivamente.

42 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
Teorema 2.2.6. (Laura Soria, 2015) Las algebras de Lie de dimension 9 sobre el cuerpo F,con factor de Levi isomorfo a sl
2
(F) y con radical resoluble R(L), con tres modulos triviales de
dimension uno, son isomorfas a una de las algebras L⇤3,k
que aparecen en la siguiente lista. Las
algebras L⇤3,k
= Sk
� Rk
, se describen mediante una base {xi
}1i9
, donde los tres primeros
elementos {x1
, x2
, x3
} constituyen una base estandar del factor de Levi Sk
, de este modo:
[x1
, x2
] = 2x2
, [x1
, x3
] = �2x3
, [x2
, x3
] = x1
.
El subespacio Rk
, generado por el resto de los elementos es el radical resoluble de L⇤3,k
y des-
compone como Rk
= Rk1
� Rk0
, donde Rk1
= �6
i=4
Fxi
es un Sk
-modulo de tipo V (2) y
Rk0
= �9
j=7
Fxj
es un modulo trivial. Ası, las algebras listadas comparten los productos no
nulos:
[x1
, x4
] = 2x4
, [x2
, x5
] = x4
, [x3
, x4
] = 2x5
, (2.2)
[x1
, x6
] = �2x6
, [x2
, x6
] = 2x5
, [x3
, x5
] = x6
.
Ademas, en todas ellas, se verifica que Rk1
es una subalgebra abeliana.
(a) Lp
3,1
= S1
�R1
, con productos no nulos (que completan los descritos en ( 2.2)), [x4
, x9
] =x4
, [x5
, x9
] = x5
, [x6
, x9
] = x6
, [x7
, x9
] = px7
, [x8
, x9
] = px8
con p 6= 0.
(b) Lp
3,2
= S2
�R2
, con productos no nulos (que completan los descritos en ( 2.2)), [x4
, x9
] =x4
, [x5
, x9
] = x5
, [x6
, x9
] = x6
, [x7
, x9
] = px7
, [x8
, x9
] = x7
+ px8
con p 6= 0.
(c) Lp,q
3,3
= S3
� R3
, con productos no nulos (que completan los descritos ( 2.2)), [x4
, x9
] =x4
, [x5
, x9
] = x5
, [x6
, x9
] = x6
, [x7
, x9
] = px7
, [x8
, x9
] = qx8
con p 6= q y pq 6= 0.
(d) Lp,q
3,4
= S4
� R4
, con productos no nulos (que completan los descritos ( 2.2)), [x4
, x9
] =x4
, [x5
, x9
] = x5
, [x6
, x9
] = x6
, [x7
, x9
] = qx7
� px8
, [x8
, x9
] = px7
+ qx8
con p 6= 0.
En el caso F = R, los productos se pueden expresar en la forma [x4
, x9
] = px4
, [x5
, x9
] =px
5
, [x6
, x9
] = px6
, [x7
, x9
] = qx7
� x8
, [x8
, x9
] = x7
+ qx8
con p 6= 0 y q real arbitrario.
Demostracion. Escribimos la descomposicion de Levi de L = sl
2
(F) � R. Sabemos que R =N
1
�R0
, con R0
= T0
�N0
y que N1
, de acuerdo con el Lema 2.2.1, es un modulo de tipo V (2).De aquı, concluımos que, dimN = dimN
1
+ dimN0
> 3, luego dimN0
= 0, 1, 2 o 3. Vamos aestudiar las distintas dimensiones de N
0
.Si la dimN0 = 3, entonces R es nilpotente. Agrupamos la parte no trivial de L en L
1
, L1
=sl
2
(F)�N1
(ver Proposicion 1.4.1), y entonces L0
= N0
. Sabemos por PE9 de las Propiedades2.1.2, que [L
1
, L0
] = 0. Veamos que ocurre al multiplicar [L1
, L]: [L1
, L] = [L1
, L1
] + [L1
, L0
] =[sl
2
(F), sl2
(F)] + [N1
, N1
] + [sl2
(F), N1
].Analizamos cada producto por separado, teniendo en cuenta que N
1
es un sl
2
(F)-modulo yque el producto [N
1
, N1
] es sl2
(F)-invariante y antisimetrico y concluıdos que:
[sl2
(F), sl2
(F)] ✓subalg
sl
2
(F),
[V (2), V (2)] ✓Cuadro 2.2
V (2),
[sl2
(F), V (2)] ✓Cuadro 2.1
V (2).
Luego esto nos dice que, [L1
, L] ✓ L1
. Por tanto, L1
es un ideal de L. Por otro lado,
[L0
, L] = [L0
, L1
]=
0
+ [L0
, L0
] ✓L0 subalg
L0
.

2.2. CONSTRUCCIONES DE ALGEBRAS 43
Luego, L0
tambien es un ideal de L. Entonces, L sera descomponible, lo que contradice lahipotesis. Por tanto, la dimension de N
0
no puede ser tres.Ahora, agruparemos en una sola discusion los casos en que dimN0 = 0,1. En este caso, el
algebra R0
, de dimension 3, es nilpotente porque, usando PE4 de Propiedades 2.1.2, R2
0
✓ N0
,la dimension de R2
0
es 1; la clasificacion que ofrece [2, Capıtulo 3, pagina 20] en el caso 3-dimensional nos dice que es o bien abeliana o bien Heisenberg y las dos son nilpotentes. Veamosque si dimL/N > 2 entonces, podemos encontrar un elemento no nulo z 2 R
0
� N0
tal quead
L
z = 0, lo que contradice PE8 de Propiedades 2.1.2.Demostremoslo, tomamos {x, y} l.i. tal que hx, yi \ N
0
= 0 y 0 6= z = ↵x + �y. Entonces,como ad
R0 z es nilpotente y N1
es irreducible, usamos PE8 de Propiedades 2.1.2 y tenemos que[z, a] = ✓
z
a, 8a 2 N1
para algun ✓z
6= 0. Luego, z actua con escalar ✓z
en N1
, x actua conescalar ✓
x
en N1
e y lo hace con escalar ✓y
, todos ellos distintos de cero. Ası,
ad z(a) = ↵ad x(a) + �ad y(a) = (↵✓x
+ �✓y
)a.
Por otro lado, ad z(a) = ✓z
a. Luego ✓z
a = (↵✓x
+ �✓y
)a con ✓z
· ✓x
· ✓y
6= 0. Entonces, ✓z
=↵✓
x
+ �✓y
, veamos que podemos encontrar una pareja (↵,�) 6= (0, 0) tal que ✓z
= 0, yaque tenemos una ecuacion3 ↵✓
x
+ �✓y
= 0 homogenea con dos incognitas. Luego al menosencontramos una solucion no trivial, por ejemplo tomamos ↵ = �✓
y
y � = ✓x
y nos encontramoscon que el elemento 0 6= z = �✓
y
x+ ✓x
y cumple que ✓z
= 0, lo que contradice PE8.Por tanto, la unica posibilidad es que dimN0 = 2 y
dimN = dimN1
+ dimN0
= 3 + 2 = 5.
Nos fijamos en la clasificacion que ofrece [2, Capıtulo 3, pagina 20] para algebras de Lie dedimensiones menores o iguales a tres. Como N
0
es una subalgebra, tenemos dos posibilidades,que sea o no abeliana. Si N
0
fuera no abeliana, entonces N0
= hx, yi con [x, y] = x. En estecaso,
[N0
, N0
] = spanFh[x, x], [x, y], [y, y]i = F · x = N2
0
,
[N2
0
, N0
] = spanFh[x, x], [x, y]i = F · x = N3
0
.
Luego N3
0
= N2
0
por tanto, N0
no serıa un algebra de Lie nilpotente, lo que es una contradiccion,pues N
0
✓ N. Por ello, N0
es un algebra de Lie abeliana, esto es [N0
, N0
] = 0.Ahora, debemos definir los posibles productos que se pueden dar para conseguir un algebra
de Lie en el espacio vectorial,
L = sl
2
(F)�R = sl
2
(F)� V (2)� 3V (0),
con R = N1
�R0
, N1
= V (2) y R0
= N0
� T0
= 2V (0)� V (0).Por la descomposicion en sl
2
(F)-modulos, en el espacio vectorial L, podemos tomar unabase uniendo bases estandares para sl
2
(F) = hx1
, x2
, x3
i y N1
= hx4
, x5
, x6
i = hX2, XY, Y 2i,que completaremos con un subespacio 3-dimensional R
0
, en el que distinguiremos una base2-dimensional correspondiente a N
0
= hx7
, x8
i y una 1-dimensional para T0
= hx9
i. Sabemosque [N
0
, N0
] = 0 = [N0
, N1
] usando PE9 de las Propiedades 2.1.2. Por 2.1.3 ver Cuadro 2.1tenemos definidos los productos de elementos de sl
2
(F) por elementos de R y por elementos desl
2
(F) pues sl2
(F) es subalgebra de L y R es un sl
2
(F)-modulo.Por tanto, nos queda definir el producto [N
1
, N1
] y [T0
, N ], donde N = N1
� N0
es elnilradical. Empecemos por el producto [N
1
, N1
] que sera antisimetrico y, fijandonos en el Cuadro
3La solucion a esta ecuacion es, ↵ = � ✓
y
✓
x
�, en general las soluciones seran de la forma
n
� ✓
y
✓
x
�
�
�
�
� 2 Fo
, que
es un espacio vectorial de dimension uno debido a que el conjunto de soluciones de un sistema homogeneo lo es
y que, en este caso, dim(sol. sist. hom.) = #incognitas� rango(M = [✓
x
, ✓
y
] 6= (0, 0)) = 1.

44 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
2.2 tenemos que salvo escalares el producto debe ser (·, ·)1
: V (2) ⌦ V (2) ! V (2). Como[N
1
, N1
] ✓ N y N solo tiene un modulo irreducible de tipo V (2) entonces N1
es una subalgebra3-dimensional en la que como indica el Cuadro 2.2 [N
1
, N1
] ✓ N1
, N1
= hx4
, x5
, x6
i, conproductos
[x4
, x5
] =↵
2x4
, [x4
, x6
] = ↵x5
y [x5
, x6
] =↵
2x6
.
Entonces, si ↵ 6= 0 N2
1
= N1
, que no puede ocurrir pues N1
✓ N que es nilpotente. Esto indicaque [N
1
, N1
] = 0. Ası el nilradical N es una subalgebra abeliana 5-dimensional.Luego, solo nos queda por definir el producto entre el nilradical N y la parte trivial que no
pertenece al nilradical, T0
= F · x9
. Veamos, N debe ser ad x9
-invariante por ser ideal, y por laPropiedad 2.1.2 PE8, como N
1
es irreducible, entonces adN1x9
= ↵IN1 para algun ↵ 6= 0. Por
tanto, la matriz asociada a la aplicacion en las bases dadas sera de la forma,
M =
0
B
B
B
B
@
↵ 0 00 ↵ 00 0 ↵
0
0a bc d
1
C
C
C
C
A
Como ↵ 6= 0, sin perdida de generalidad podemos tomar ↵ = 1, pues si cambiamos x9
= x09
con x09
= 1
↵
x9
, entonces los productos quedan de la siguiente forma, [xi
, x9
] =⇥
xi
, 1
↵
x9
⇤
=1
↵
↵xi
= xi
. Luego la matriz M , quedarıa de la forma:
M =
0
B
B
B
B
@
1 0 00 1 00 0 1
0
0a bc d
1
C
C
C
C
A
Ahora, para averiguar la forma de la matriz asociada a adN
x9
: 2V (0) ! 2V (0), nosvamos a apoyar en la Teorıa de estructura de endomorfimos, pues ad
N
x9
es uno de ellos. Seintenta encontrar una matriz que sea diagonal, ya que nos permitira estudiar de una maneramas sencilla el comportamiento de la aplicacion. Pero la submatriz A =
�
a b
c d
�
de M , no serasiempre diagonalizable, y por ello, estudiaremos sus posibles formas canonicas de Jordan. Paralo cual analizaremos si p
A
(x) polinomio caracterıstico de A (de grado 2), tiene o no raıces en elcuerpo F.
Caso 1
El polinomio caracterıstico p(x)A
tiene una raız en F, entonces p(x)A
escinde, luego p(x)A
=(x� p)(x� q), con p y q sus raıces. Estudiaremos las distintas posibilidades para p y q.
Si p = q, luego tendremos un unico valor propio � = p, con multiplicidad algebraica dos,entonces tenemos que distinguir las posibilidades de la multiplicidad geometrica:
O bien mg(p) = 2, entonces A es diagonalizable, en la que la matriz de Jordan es: J =�
p 0
0 p
�
. Por lo que existira una base de N0
= hx7
, x8
i en la que ademas de los productosanteriores, tenemos los siguientes: [x
7
, x9
] = px7
y [x8
, x9
] = px8
. Tener en cuenta quep 6= 0, pues si p = 0, [N
0
, x9
] = 0 = [N0
, N1
] = [N0
, sl2
(F)], luego N0
✓ Z(L) y N0
6✓ L2,lo que contradice la Proposicion 1.1.16. Entonces, cuando nos encontremos bajo estasituacion, con base estandar de sl
2
(F), base deN0
= hx7
, x8
i, yN1
= V (2) = hx4
, x5
, x6
i =hX2, XY, Y 2i. Con productos no nulos,

2.2. CONSTRUCCIONES DE ALGEBRAS 45
[xi
, xj
], con 1 i 3 y 4 j 6 definidos en el Cuadro 2.1,
[xk
, x9
] = xk
con 4 k 6,
y por ultimo, [x7
, x9
] = px7
y [x8
, x9
] = px8
con p 6= 0.
Estaremos frente al algebra Lp
3,1
, descrita en (a).
O bien mg(p) = 1, entonces A no es diagonalizable, y la matriz de Jordan es: J =�
p 1
0 p
�
.Por tanto, existira una base de N
0
= hx7
, x8
i en la que tenemos los siguientes productos:[x
7
, x9
] = px7
y [x8
, x9
] = x7
+ px8
. Razonando igual que en el caso anterior, llegamosa la conclusion de que p 6= 0. Entonces, cuando estemos bajo estas condiciones, con lasbases definidas, tendremos los siguientes productos no nulos:
[xi
, xj
], con 1 i 3 y 4 j 6 definidos en el Cuadro 2.1,
[xk
, x9
] = xk
con 4 k 6,
y por ultimo, [x7
, x9
] = px7
y [x8
, x9
] = x7
+ px8
con p 6= 0.
Estaremos frente al algebra de Lie Lp
3,2
, descrita en (b).
Si p 6= q, entonces tenemos dos valores propios �1
= p y �2
= q con multiplicidad algebraicauno cada uno. Luego la submatriz A de M es diagonalizable, y por tanto, la matriz de Jordan,tendra la forma: J =
�
p 0
0 q
�
. Para este algebra existira una base de N0
= hx7
, x8
i, a la que juntoa los productos conocidos, tenemos tambien [x
7
, x9
] = px7
y [x8
, x9
] = qx8
. Ahora bien, si p = 0,entonces [x
7
, x9
] = 0 = [x7
, N ] = [x7
, sl2
(F)]. Luego x7
2 Z(L), y x7
/2 L2, lo mismo ocurresi q = 0. Luego por la Proposicion 1.1.16 L es descomponible, lo que es una contradiccion.Por tanto, p · q 6= 0. Entonces, cuando estemos bajo estas condiciones, con las bases definidas,tendremos los siguientes productos no nulos:
[xi
, xj
], con 1 i 3 y 4 j 6 definidos en el Cuadro 2.1,
[xk
, x9
] = xk
con 4 k 6,
y por ultimo, [x7
, x9
] = px7
y [x8
, x9
] = qx8
con pq 6= 0.
Estaremos frente al algebra de Lie Lp,q
3,3
, , descrita en (c).
Caso 2
El polinomio caracterıstico p(x)A
= x2 � px � q no tiene raıces en el cuerpo F. En estecaso, la forma racional de la matriz A sera J =
�
0 q
1 p
�
. Para este algebra existira una basede N
0
= hx7
, x8
i que, junto a los productos conocidos, tendremos tambien [x7
, x9
] = x8
y[x
8
, x9
] = qx7
+ px8
donde p2 + 4q /2 F2.Entonces, cuando estemos bajo estas condiciones, con las bases definidas, tendremos los
siguientes productos no nulos:
[xi
, xj
], con 1 i 3 y 4 j 6 definidos en el Cuadro 2.1,
[xk
, x9
] = pxk
con 4 k 6 con p 6= 0,
y por ultimo, [x7
, x9
] = x8
y [x8
, x9
] = x7
+ qx8
con p2 + 4q /2 F2.
Estaremos frente al algebra de Lie Lp,q
3,4
, descrita en (d).En el caso del cuerpo de los reales F = R, podemos proceder como sigue: como p
A
(x)es irreducible, sus raıces seran complejas de la forma a± bi con a, b 2 R y b 6= 0. En este caso,podemos encontrar la llamada matriz real de A que es de la forma J =
�
a b
�b a
�
, para la que

46 CAPITULO 2. ALGEBRAS DE LIE 9-DIMENSIONALES
existe una base de N0
= hx7
, x8
i que, junto con los productos anteriores, tendremos tambien[x
7
, x9
] = ax7
�bx8
y [x8
, x9
] = bx7
+ax8
. Ası sobre los reales, con las bases definidas, tendremoslos siguientes productos no nulos:
[xi
, xj
], con 1 i 3 y 4 j 6 definidos en el Cuadro 2.1,
[xk
, x9
] = xk
con 4 k 6,
y por ultimo, [x7
, x9
] = ax7
� bx8
y [x8
, x9
] = bx7
+ ax8
con b 6= 0.
Ahora bien, tomando x09
= 1
b
x9
y llamando p = 1
b
6= 0 (numero real arbitrario no nulo) losproductos anteriores quedan modificados en la forma:
[xk
, x09
] = pxk
con 4 k 6,
y por ultimo, [x7
, x09
] = a
b
x7
� x8
y [x8
, x9
] = x7
+ a
b
x8
con q = a
b
(puede ser cualquiernumero real).
Veamos que todas las algebras de Lie obtenidas son indescomponibles. Razonando igualque en el Teorema 2.2.2, suponemos que las algebras de la lista son descomponibles y porello, L⇤
3,k
= I1
� I2
, con I1
, I2
ideales de L3,k
y I1
, I2
6= 0, L⇤3,k
. Donde I1
es no resoluble eI2
es resoluble. Al ser L⇤3,k
descomponible, tenemos que es suma directa de ideales, de donde[I
1
, I2
] = 0. Observamos que la parte del radical de I1
debe contener a N1
de tipo V (2) puessi esto no ocurre, el factor de Levi de I
1
actuarıa trivialmente sobre V (2) y esto no es posible.De este modo, I
1
= sl
2
(F) �N1
� I1
\ R0
. Tenemos que I2
6= R0
pues [R0
, N1
] 6= 0. Tampocopuede ocurrir que I
2
= F · z, pues entonces z 2 Z(L⇤3,k
) 6✓ (L⇤3,k
)2 ✓ I21
✓ I1
. Por tanto I2
debeser un ideal de dimension 2 y resoluble dentro de R
0
y no puede ser abeliano (luego es distintode N
0
) pues si lo fuera, razonando como antes, estarıa contenido en el centro y no contenido en(L⇤
3,k
)2. Ası, I22
= I2
= F · z ✓ N0
. Ası, podemos tomar un elemento a = b+x9
2 I2
con b 2 N0
y tenemos que: 0 = [a, I1
] = [x9
, N1
] + [x9
, I1
\ R0
] y como R0
y N1
son ad x9
-invariantes,tenemos que [x
9
, N1
] = 0, lo que es una contradiccion. Por tanto, todas las algebras de Lielistadas son indescomponibles.
Comentarios 2.2.7. En el Teorema previo, las algebras de Lie las hemos obtenido haciendouso del Lema 1.3.2 y de la Teorıa de estructura de endomorfismos. Cuando la dimR
0
= 3, noconseguimos obtener ningun algebra de Lie nilpotente. Ademas, debemos hacer incapie en quepara obtener algebras de Lie, y ademas que estas sean indescomponibles, la dimension de N
0
debe ser dos.La notacion que hemos empleado para estas algebras es L⇤
3,k
, donde 3 es el numero demodulos triviales de dimension uno que tiene el radical de L⇤
3,k
, k es el orden de aparicion delalgebra en el transcurso de la demostracion, y por ultimo, ⇤ es el o los parametros de los quedependen las algebras de Lie obtenidas.
En nuestra lista, las algebras Lp
3,1
y Lp,q
3,3
, corresponden en la clasificacion de Turkowski conLp,q
9,32
, donde p y q pueden ser iguales, en cambio en nuestra lista, hacemos distincion entre esasposibilidades. El algebra Lp
3,2
, se corresponde en la clasificacion con la Lp
9,33
, donde Turkowski,ha pasado por alto la restriccion de que p 6= 0, pues si p = 0, por el Lema 1.1.16, Lp
9,33
serıadescomponible, lo que contradice las restricciones impuestas por Turkowski para su clasificacion,y nuestras hipotesis. Por ultimo, el algebra Lp,q
3,4
, se corresponde en la clasificacion con la Lp,q
9,34
en la que aparece la restriccion q � 0. (pendiente el estudio de isomorfismos que puden darlugar a esta restriccion.)

Conclusion
La elaboracion de este proyecto, me ha permitido adentrarme en los preliminares de la in-vestigacion en Matematicas de la mano de las algebras de Lie y el uso de las tecnicas basicas. Elestudio de la teorıa de estructura de este tipo de algebras me ha permitido observar los patronesque se siguen en el aprendizaje de cualquier estructura algebraica. Definiciones, subestructuras,ideales, cocientes y Teoremas de isomofıa ası como el estudio y reconocimiento de ejemplos sonfundamentales, tanto si hablamos de espacios vectoriales, como si trabajamos en grupos o ani-llos. La lectura, analisis y comprension del texto cientıfico de Turkowski ası como la elaboracionde pruebas razonadas alternativas para justificar sus resultados, me ha ayudado a mejorar enlas tecnicas de demostracion en las que tanto insistıan algunos de mis profesores del Grado.
Finalmente, la formacion recibida desde todas las disciplinas del Grado en Matematicas meha ayudado en el desarrollo del trabajo y en especial la obtenida en Algebra.
47


Anexo
Structure of Real Lie Algebras, P.Turkowski (1992)
49


Structure of Real Lie Algebras
P. Turkowski
Academy of Agriculture
Physics Department
Mickiewicza 21 31-l 20 Krakdw, Poland
Submitted by Hans Schneider
ABSTRACT
Restrictions are presented on the radical structure of an indecomposable Lie algebra. These restrictions are consequences of both the Levi theorem and the representation theory of semisimple Lie algebras. As an application, all real Lie algebras of dimension 9 that admit a nontrivial Levi decomposition are found. These algebras are expressed in terms of known solvable and simple algebras of smaller dimensions and in terms of representations of simple algebras.
1. INTRODUCTION
It is of interest for physical applications to classify all real Lie algebras into isomorphy classes. The present study forms a part of a series of papers, by several authors, in which low-dimensional real Lie algebras are enumer- ated. At this stage all real Lie algebras of dimension up to six are known; for a list of references see e.g. [l], [2], and [3].
The aim of this paper is to investigate nonsemisimple, nonsolvable Lie algebras over the field of real numbers. The method which we employ is based on the Levi theorem. We shall denote by N the radical of a finite-dimensional Lie algebra I,, i.e. the maximal solvable ideal. It is always possible to find a basis of L such that L contains a semisimple subalgebra S, called the Levi factor, complementary to N [4-61. The decomposition I. = N i S, where i denotes the vector-space sum of N and S, is called the Levi decomposition, and the following relations hold: [N, N] c N, [S, N] c N, [s, s] = s.
LINEAR ALGEBRA AND ITS APPLICATIONS 171:197-212 (1992)
0 Elsevier Science Publishing Co., Inc., 1992
197
655 Avenue of the Americas, New York, NY 10010 0024-3795/92/$5.00

198 P. TURKOWSKI
There are two possibilities for interaction of the subalgebras N and S: either [S, N] = 0 or [S, N] f 0; to distinguish between them we write L = N@S and L = NGS, respectively, instead of L = N -i- S. There are no restric- tions i$ solvable algebra N when N@S structure is considered. However, for N@S the above statement is not true. It was the subject of our prev@s paper [3] to find all possible radical structures for algebras L = N@S, dim L < 8, and, as a consequence, all nontrivial Levi decompositions for algebras of dimensions up to 8. “Nontrivial” should be understood in the sense that these algebras are not direct sums of algebras of lower dimensions, that is, they are indecomposable algebras.
In this paper, in-section 3, we give a similar list of real indecomposable Lie algebras L = N@S, dim L = 9, where N # 0 and S # 0. This list and the previous one seem to be useful in that the algorithms of identifying Lie algebras are known [l] and a computer program is available that realizes the Levi decomposition for Lie algebras over the real numbers [7]. Section 2 collects some facts on the radical structure that are valid for an algebra of any dimension and that are used in Section 3. In Se_ction 4 we point out which of the nine-dimensional real Lie algebras L = N@S coincide over the field of complex numbers C.
2. THE RADICALS
Let L be a Lie algebra over the field of real numbers, and let L = N6S be its Levi decomposition. Therefore, for r E S and a E N, one has
[x,a]=R(x)*a, (1)
where R(x) is a linear mapping of N into N, and R(x) * a denotes the image under R(x) of a in N. Let {e,,..., ehr} be a basis of N. With respect to the given basis, R(x) are real n X n matrices, n = dim N; we define R(x) * eL by R(x)* eL = CkzIRf(x)e,. Under a change of the radical basis the matrices R:(x) behave as a tensor of type (1,l): if Z, = qlel, then Ez(x)Fk = R&(x)~~*. (Any index that appears twice, once as a subscript and once as a superscript, is understood to be summed over.)
The Jacobi identity for the triples {x, y, a}, where x, y E S and a E N, requires the linear mapping R : S 3 x -+ R(x) E GL(n, R), where GL(n, [w) denotes the general linear algebra of all n X n real matrices, to be a representation of S:
R([x,y])*a=R(x)*(R(y)*a)-R(y)*(R(x)*a). (2)

REAL LIE ALGEBRAS 199
Therefore, the representations of the Levi factors can be used to label semidirect sums; to specify the semidirect sum, we should give the represen- + tation R and write L = N @ S instead of L = N%S. For an indecomposable
algebra L = N G S the reptesentation R is faithful: R(x) = 0 implies x = 0.
Furthermore, tht Jacobi identity, for the triples (r , a, b}, reads
R(x)*[a,b]=[R(x)*a,b]+[a,R(x)*b]. (3)
Hence, R(x) E Del(N) for all x in S, where Del(N) denotes the derivation algebra of N. These derivations R(x) are outer ( = non-inner) in N.
The existence of derivations R(x) E Der(N), which form a semisimple derivation algebra, is reflected in certain restrictions on the radical structure. There are some useful properties of radicals implied by (2) and (3) which are valid for any dimension of N. Let R(x) E Der(N) act on the radical N. Since N is solvable, the &riued series defined by N(O) = N, NC’) E [N, N],. . . , N”, E [NC’- I), NC’-- “1 goes down to zero. All these N”’ are characteristic idea2.s in N, that is, N”’ are invariant subspaces of N under R(r):
R(x) N"' G N"', (4
for all x in S and all r [5, p. 61. We recall also that the radical N is mapped into the maximal nilpotent ideal of N, called nilradical, by any R(x) E Der( N):
R(x)N c NR, (5)
where NR denotes the nilradical contained in the radical [6, p. 513.
THEOREM 2.1. Let_R(x) E Der(N) for all x in S, and let it o!ejk the
semidirect sum L = N @ S. For an irreducible representation R of the Levi R factor S the radical N is Abelian.
Proof. As a consequence of (4) for R irreducible, either No) = 0 or N(r) = N. As N is solvable, No) # N. n

200 P. TURKOWSKI
THEOREM 2.2. Let _$(r) E Der(N) fw all x in S, and let it define the
semidirect sum L = N @ S. For a reducible representation R of the Levi
factor S (completely dR ‘bl re uca e, since S is semisimple) that does not possess a zero representation in its decomposition into the direct sum of irreducible representations, the radical N is nilpotent.
Proof. According to (5) we have N = NR. n
Finally, we shall use the fact that if R is a reducible representation of S that possesses a zero representation in its decomposition into the direct sum of irreducible representations, then the set of R-constant elements, i.e., the set of elements z E N satisfying R(x) * z = 0 for all x E S, is a subalgebra of N [6, p. 281.
3. REAL LIE ALGEBRAS OF DIMENSION 9
In this section we give all real indecomposable Lie algebras L = NGS of dimension 9 such that N # 0 and S # 0.
There are nine semisimple real Lie algebras of dimension less than 9, namely: SO(~), sl(2, R), so(3, l), so(3) @ SO(~), sl(2, R) @ sl(2, R), so(3) @ sl(2, R), su(3), sl(3, R), and su(2,l). However, for an indecomposable algebra NGS, a faithful n x n real matrix representation of the Levi factor is required, where n = dim N. As a consequence, we consider g-dimensional algebras only with S = SO(~) and S = sl(2, R).
As an example let us consider the algebras N @ sl(2, R) assuming
R = D,@3D,, where D, (J = 0, i, 1,. . .) d enote represRentations of sl(2, R) taken in its standard form. This implies the following nonzero structure constants: C2,, = 2, C3,, = -2, Cl,, = 1 and, via the relation (11, C4,, = 2, C6,, = - 2, C4, = 2, C5,, = 1, C5, = 1, C635 = 2, where Cikl (i, k, I= 1,2,3) define sl(2, R), and CfK (I, K = 4, . . . , 9 and j = 1,2,3) define the commuta- tors of [S, N] type, i.e., the semidirect sum.
In the next step, we look for the radicals that have the derivations by R = D,03D,. These radicals are solvable algebras of dimension 6. Let US
denote the set of R-constant elements in the radical N by (2). As was mentioned in the previous section, {.a} is a subalgebra of N. We are allowed to choose as this subalgebra an arbitrary S-dimensional solvable Lie algebra

REAL LIE ALGEBRAS 201
which is specified by Cr,K (I, J, K = 7,8,9>. To obtain the remaining struc- ture constants and make the radical structure precise, we use directly the Jacobi identity (3). It is easy to find that there are only three nonisomorphic, 6-dimensional radicals that lead to three indecomposable algebras Ns sl(2, R), namely:
defined by C4,, = 1, C’,, = 1, C6,a = 1, C7,, = p, C”,, = 4 (to avoid decomposability into the sum of lower dimensional algebras we assume p # 0 and 4 f 01, defined by C4,, = 1, C’,, = 1, C”,a = 1, C7,, = p, C7,, = 1, @,a = p (p arbitrary), and defined by C4,, = p, C’,, = p, C6,, = p, C77, = q, C*,, = - 1, C7,, = 1, c”,, = 4 (to avoid decomposability we assume p # 0, whereas 9 > 0 is assumed to avoid double counting).
To obtain the structure constants given above we use the freedom to perform a transformation of the radical basis elements {e4,. . . , ea}; in the case of R = D,@3D,, we are allowed to perform the following transformation Y that does not change commutators [S, N], RF(r)rL = R’,(x)FLN:
I 9 : .o 0 0 0 0 0
y= . . . . . . . . i?..?...? I 0 0 0.
I 000: Y 0 0 0: I
\
where the matrix 9, by Schur’s lemma, is a scalar multiple of the identity, and W is an arbitrary nonsingular 3x3 real matrix. -+
As the second example let us consider N @ SO(~), assuming R = 2 ad SO(~)
[ = adso(3)@adso(3)]. As a consequence oPTheorem 2.2 the radical N of dimension 6 is nilpotent. Furthermore, as a consequence of (4) one has either dim N(i) = 0, or dim N(i) = 3 and dim N (‘) = 0 Therefore, N is Abelian or it . is a nilpotent algebra that possesses the Abelian 3-dimensional derived algebra. To specify its structure in the second case mentioned above, we apply the fact that the ideal N& defined by Ncz, = [N(l), N], must be the characteristic ideal in N, i.e., R(x)Nc2, c Nc2, for all x in S. Since N is nilpotent, we have dim NC,, < dim N(l), and this implies dim Nca, = 0. There is only one nilpotent algebra N, dim N = 6, that contains a sequence of charac-

202 P. TURKOWSKI
TABLE 1 REAL LIE ALGEBRAS OF DIMENSION 9 THAT ADMIT A NONTRIVIAL LEVI DECOMPOSITION:
THE SEMIDIRECT S U M S
The representation of the Levi factor
Levi that defines Nonzero structure constants No. factor the semidirect sum of the semidirect sum
1. sof3)
2. sot31
3. so(3)
4. so(3)
5. sl(2, R)
6. sl(2, RI
7. sl(2, R)
8. sl(2, RI
9. sl(2, RI
ad s&3) @ 3D,
R,@2D,
Rs@Da
2 ad SO(~)
D1,@4Da
D,83D,
Ds,,@2Do
2D,,,@2Do
D,@Do
c’,, = ;,
c4 ! 17 = -1,
C’l, = +,
6 e-1 c15- 2)
C4 17 = -2,
CS,, = 3,
csls = 1,
c4r4 = 2, cs,, = - 2,
c4 -3 14- 3
c51, = 1,
c4 -1 14- >
cs,, = -4,
c6,, = - 1, c?,, = 1,
c5,4 = 1
c4,, = ‘_I +,
c’,, = +,
c6,, = - ;,
c”,, = +,
c7 =I 25 2,
c4,, = -2, cs,, = - 2, c8,, = - 1, c’ =3 2x
csa, = - 1,
$ss : : 1, c727 _ 1
29- T
c4,5 = 1,
es4 = 1, cd,=-1
cs,, = +, c7,=-;
c4,= -f,
c5,, = +
c5, = 2,
cd,, = -2, c’, = 1, cs,’ = - 1,
c5,, = 1, c4s5 = - 1, c”,, = 1, c’s, = - 1
c5, = 1,
c4,, = 2, cs,, = 1,
c4,, = 3, cs,, = 2, css7 = 1,
c4,, = 1,
c6,, = 1,
= ;s:; = ;I cs,, = 2, c’s, = 1,
c5s4 = 1 cs,, = 2’
cs, = 1, cs,, = 2, c’s, = 3,
c?,, = 1,
c’s, = 1,
c5, = 1, cs, = 2,
= $;; = ;>

REAL LIE ALGEBRAS
TABLE 1 Continued
203
No. Levi
factor
The representation of the Levi factor
that defines the semidirect sum
Nonzero structure constants of the semidirect sum
10. sl(2, RI
11. sI(2, R ) D 5/2
12. s1(2, R 1 J’,/,@D1/2
13. sl(2, R) 2D,
14. sl(2, R) 3&,2
cd,, = 3, c5,, = 2 c6,, = 1:
cH2, = 1,
cd,, = 2, c5,, = 1, c7 =2 C”;; = 1:
cd,, = 1,
c”,, = 1,
CH2, = 1,
c?,, = 1, c6 =2 c?;: = 1:
c5, = 1, c6,, = 2 c’,, = 3:
= $; = ;:
c5,, = 1, c6,, = 2 V3, = 3:
ca 38 =1 7
c5,, = 1,
:jHb:; I f:
cg,, = 2
c5,, = 1,
CT,, = 1,
c?,, = 1,
teristic ideals of the required type: dim N(i) = 3, dim NC,, = 0; it is denoted by &a,s (see Reference [8]). One directly verifies that, for the algebra &a,a and the representation R = 2adso(3), the Jacobi identity (3) is satisfied.
All our results are presented in Tables 1 and 2. In Table 1 faithful representations of so(S) and sl(2, R) Levi factors are given in the form of 6 ~6 real matrices. The algebras ~(3) and sl(2, R) are defined by the following nonvanishing structure constants: C3,, = 1, C2,, = 1, Cl,, = 1 and
c2,2 = 2, c3,, = -2, cl,, = 1, respectively. The symbols R, and Dcn_lj,2 denote n x n real matrix representations of ~$3) and sl(2, R), respectively,

204
TABLE 2
P. TURKOWSKI
REAL LIE ALGEBRAS OF DIMENSION 9 THAT ADMIT A NONTRIVIAL LEVI DECOMPOSITION a
The representation of the Levi factor
Levi that defines Name decomposition the semidirect sum
Nonzero structure constants of the radical
Lgp
G.2
Li'3y
L 9,4
L&i
Lg.;
L9p,7
L 9,x
L 9.9
L 9.10 L 9.11
L 9.12
ad SO(~) @3D,
g,,,@ + so(3) ad SO(~) @ 3D,
&j,@ -+ so(3) p + o,q > o
ad SO(~) CB 3D,
R4@2Do
g,, I@ + sot31 P#O
R4@2Do
&j, II@ -+ d3)
q+o
R4@2Do
g6, I@ -+ sot31
6.cdIe + 43)
a&e + so(3)
Ja$J2@ + sl(2, R)
R4@2Do
R4@2Do
R,@D O
2adso(3)
2 ad SO(~)
D,/,@4Do
“1/,@4Do
$;; I ;, = ;4;: = y”’
C7”, = 1: z-1 $3 = 1 ’
c4,, = 1, c7,, = 1,
c4,, = p, c7sg = - 1, c5 -1 79- )
C”,, = 1, c”,, = 1,
$;Cp,”
c4,, = 1, c7, = 1, CT,, = 1,
c44g = 1, c7,, = 1,
c?,, = 1,
c6,, = 1,
c4,, = 1,
C7,, = 9,
c;, = 1 c7,g = 1:
c5s, = p, c 6 6 g = p ,
c 6 ,, = - 1 ,
c 6 = 8 9 q
c*,, = 1, css6 = -1,
c5sg = 1, c6, = 1,
C H ,9 = p
c ”,, = - 1 , c 5 ,, = p ,
c 6 - 6 9 7 P, c ”,, = q
c 4 4 g = p , c 6 ,, = 1 ,
c 5 - 5 9 - P, c 7 ,, = 1 ,
c 6 - 6 9 - P, c ” ‘__I
7 9- I
c ”,, = 2p
c64g = 1, cs,, = 1 cd,, = i 1,
c5,, = 1 cs,, = 1’
P, = 1,
c”,, = -1, C7,,=l
c6,, = 1, CT,, = 1
c5,, = 1, c669 = p, CH,, = r

REAL LIE ALGEBRAS 205
TABLE 2 Continued
The representation of the Levi factor
Levi that defines Nonzero structure Name decomposition the semidirect sum constants of the radical
W4
4.15
L,P,20
L&2,
L 8.22
g6,28 -a s@, R) P#O
g6,,8 + SIC?, R)
g,,,@ -B sl(2, R) pq + 0, r 2 0
g,, ,@ -+ sl(2,R) Pq + 0
g,, 13@ -+ sl(2, R) p2 + q2 # 0
g,, 14~ + sl(2, R)
g6,21e + sK2, R)
g,,,,e -, SK% R)
g,.,ijQ --) sl(2, R)
g,.,,@ -+ SK% R)
P#O
g6,,8 --, sK2, RI p+o,q,o
c449 = 1, c7 - 79 - 4>
c4,g = 1, =l
;k;
c44g = p,
c’ =r,
c7;; = 1,
c645 = 1, c6,, = 2,
$; I ;:
ca,, = 1 c669 = z’p, c”,, = 2p
cd,, = 1, P,, = 1 c”,, = I;
c6,, = 1
c6,, = 2:
cs*9 = P
c6,, = 1,
g:;i 1;:
C4,, = p, P,, = 1 CT,, = 1:
c6, = 1, =2p,
g:z = 1,
c5,, = 1, c7,, = 1,
cs,, = 1,
c77g = p,
59 = P, $,, = - ]
c”,, = r
c4,g = 1, c7 - 79 - P,
c5,, = 1, c7 - 79 - P,
49 = P, Eq7y = 1,
c5,, = 1
c77g = P:
c4,, = 1, c7 - 79 - P,
=l ;:;I = 1:
c”,, = 2
c559 = p,
c7, = 4,
c”,,=q
c44g = p,
c’ - 79 - 4>
c”, = 4
c66g = p,
C76, = 1,
c6,, = q>
c5,, = 1 c”,, = q’
=p+q, $;; = q
59= P, g9 = 1,
c6 -2 69- p, c7,, = 1,
c5,, = 1,
c7,, = 1,
c5,, = 1 CT,, = 2:
c6,, = 2q, cs,g = - 1,
c55g = p,
c”,, = - 1,

206 P. TURKOWSKI
TABLE 2 Continued
Name Levi
decomposition
The representation of the Levi factor
that defines the semidirect sum
Nonzero structure constants of the radical
LG.25 g,,,,@ -+ m, l-0 IPI G 1
%6
4.27
VI.35
L 9.36
g,,,@ + m, RI &=+l
g,,,g@ + SC& RI
N6p~3pycB + s1(2, R) ‘p2 + 92 f 0
g,,,@ -+ SK% R) P9fO
g,,,@ 4 sN2, I-0
g,,,@ + sl(2, R) pzo,q>o
g,, Ie + sN2, RI P#O
g,,,,@ -+ s1(2, R)
c6,, = 1, c” -2 69- P, C8,,=2p-1
C” _ ($; I ;I
c7,, = 1,
c6,, = 1,
c6,, = 2 P, c”,, = - 1,
c44fJ = p,
c5 - 59 - 97
= $” = 1,
c7;; = !’
= 9, ;% = p,
C7:(: = 1,
= Et;: = ;I
c4,, = 1,
c 7 - 79 - P,
c4,, = 1, c77, = p,
49 = P, s, = 9 c7,, = 1:
= ;:;; = :I
c?,, = 1, CT, = 1 c”,, = 1:
c449 = P, c5,, = p, C”,,=l, C,,=l,
c4,, = 1, c5,, = 1, c”,, = 1, CT,, = 1, cx, = 1
c4,g = p, c559 = p, CG7H=1, c7,,=p, c7s9=1, c8,,=p
z,, 49 = = 9, 1, E’,
58 = = 1 P,
= p, :i&l, 1;: $;:
c449=p> c55,=9, -1 CT,,=-1,
g:;; 11’
c”,, = 1, CG,, = 1,
c5,, = 1, c6, = 1,
c”,, = 9
El c6 =I
;:I= 1: p;; = ;
= p, ;;:; = - 1,
c6,9 = p,
c8,9 = 9
c5,, = 1, c669 = 1,
cx,9 = P
gi5g : - 1 c”, = 1,
pz= 2: -3

REAL LIE ALGEBRAS
TABLE 2 Continued
207
Name
Levi decomposition
The representation of the Levi factor
that defines the semidirect sum
Nonzero structure constants of the radical
L 9.37
L 9.38
L 9.39
L 9.40
L 9.41
L 9.42
LP.4 9.43
Jx.44
j-/h4 9.45
L 9,4n
LG.49
L 9.50
2d3, I@ + sl(2, RI
2.@5,8 + sN2, RI
(6,,@@-3,3)
@ + sl(2, R)
JV--,3@ -+ sK2, RI
‘626,4@ + sN2, R)
.qs5@ + sN2, RI
g,, I@ -+ sl(2, RI
q + 0, Ipl Q 1
g,.,@ + sK2, R)
g6,1,@ + sK2, R)
q#O
g,. 13@ + sm, R)
g,.,@ + sl@, RI
ga5,8 -+ sK2, R)
g,,J6f3 + sN2, RI
c8 =l 45 ’ c9,, = 1
c4, = 1, c5,, = 1, c6, = 1, c7,g = 1
c4,g = 1, c5,, = 1, csG7 = 1
c”,, = 1, c4, = 1, cs,, = 1
c”,, = 1, cs5G= -1, cg,,=1
cs4,=-1, C”,,=l, c”,,=-1, cg,, = 1
c44g = 1, c;, = 1, c6, = p, c7 - 79 - PT c8,g = 4
c4,g = p, c5 - 59 - P, c4,, = 1, c6 =
c76g _ P,
c5,g = 1, 79 - p, c8,, = 1
$49 = p, P,, = - 1, c5,, = p, = - 1, c4,9 = 1,
c5;; = 1,
c6,g = p, CT,, = p, c”, = q
= $1; = ;,
= ;:;; = ;,
c5,, = 1,
cs,, = 2
c4m=1, P,,=l, c5, = 1, cT7, = 1, P,, = - 1
cd,, = 1, cs,, = 1 c6,g = 1- p, c5, = 1:
cd, = 1,
c7,g=1-pp,cs8g=p
c44g = 3, c;, = 3, c”,, = 1, c4, = 1, c6ag = 1, c5, = 1, CT, = 1, cs,, = 2

208
Name
P. TURKOWSKI
TABLE 2 Continued
The representation of the Levi factor
Levi that defines Nonzero structure decomposition the semidirect sum constants of the radical
G.51
L 9.52
LG.53
L 3.54 *
L 9.55
G.56
L 9.57
L 9.58
L 9.53
L 3,m
L 9.61
L 3,62
L 9.63
g,.,,@ --) sl@, R) lpl Q 1
g,.,,@ -+ SK% R) 2”,,,@2Do
g,,,,@ + sl(2, R) pa0
/yO,l.l@ -9 sl(2, R) 6.18
g,, ,@ + sl(2, R)
gs, ,@ + sl(2, R) p + 0;
(d4f;‘@2d1) a3 -+ sl(2, R)
p=o
(3&l@&.,) @ --f sl(2, R)
2D,,,@2Do
~D,,,@=‘o
::;; I ;I c”,, = 1, c*56 = - 1, c6 =
6g P, c7,3 = p, c”,, = 1+ p
$I;; I;> c4,, = 1, c5,, = 1
cs,, = 2 c6,, = 1, c’,, = 1:
CH45 = 1, c4,, = p, ca, = - 1,
c5 = 53 P, c75g=-l, cs,,=1,
;:;i : ;, C” ($; I ;;,
c5,, = 1,
ZZ ;4;; = :: ;::;; 1:: $;; I : I,
c7,,=1, cs,,=-I
=l $;;=I: $szr;,
c6,, = 1,
c4,, = 1, cs,, = 1, c”,, = 1,
C7,g = p, c”,, = p
c77g = 1, cs,, = 1
cg,, = 1
“For the structure constants that define the semidirect sums, see Table 1. The Levi factors SO(~) and sl(2, R) are defined by C3,, = C’,, = C’,, = 1 and C’,, = 2, C3,3 = -2, Cl 23 = 1, respectively.

REAL LIE ALGEBRAS 209
and are taken in the form explicitly given in Reference [3]. We give also the nonzero structure constants C:, (I, K = 4,. . . ,9 and j = 1,2,3). They are determined, via Equation (l), by the representations of the Levi factors and define the semidirect sums.
Table 1 is supplemented by Table 2, in which we present the radicals corresponding to the representations of the Levi factors given in Table 1. As a consequence, we obtain 63 real Lie algebras of dimension 9 that admit a nontrivial Levi decomposition. The jth algebra of this type is denoted by Z,gT*... , where the superscripts give the parameters on which the algebra depends. Restrictions on the range of the parameters are imposed to avoid double counting and decomposability into the direct sums of lower-dimen- sional algebras.
The following notation for the solvable algebras that form the radicals is used. n&i denotes the Abelian n-dimensional algebra. -Qzr,j denotes the jth algebra of dimension r, r Q 5; for commutation relations see Reference [8]. For the real nilpotent algebras of dimension 6 we use the names &a,j; for commutation relations see also Reference [8]. However, there is a small difference between our notation and that of Reference [8]: for the algebra && (a < 0) we use simply the name &&. The reason is that the following isomorphisms exist: @&(a < 0) m u&’ and &<,(a > 0) _ &a, i@ &a, 1, where N denotes isomorphism of the algebras; therefore, the parameter a can be suppressed.
There are 99 types of 6-dimensional solvable algebras that contain nilradicals of dimension 5. These algebras are listed by Mubarakzyanov [9] and are denoted_ by ga, j (j = 1,. . . ,991. Additionally, we define the algebra g&, = Q(~,,@u’~ given by the following nonvanishing commutators: [e,, e4l = e,, [e,, es1 = e,, [e,, e61 = 2pe,, [e,, 4 = pe, + qe,, [e,, eel = pe, + qe,, [e,, 4 = pe, - qe,, [e,, eel = pe, - qe,, where p E R and q E [w are parameters. We have g&, _ gs,az over the field of complex numbers @.
The list of 6-dimensional solvable algebras that contain 4-dimensional nilradicals is given in Reference [2]. These algebras are denoted by Ma, j.
4. THE CLASSIFICATION OF COMPLEX LIE ALGEBRAS
The classification given in the previous section provides also starting point for the classification of complex g-dimensional Lie algebras that possess a nontrivial Levi decomposition. In this section we give the entries in Table 2 which coincide over the field of complex numbers C.
Since the Levi factors so(3) and sl(2, R) are the real forms of the complex Lie algebra sl(2, C), the representations D,, 2J%,27 D,,2D, and

210 P. TURKOWSKI
adso(3), R,,R,,2adso(3) are equivalent, respectively, over the field C. As a consequence, one can prove the following isomorphisms:
q.; N LPB9 9.34,
L x4 - L9.42,
L 9.8 N L9..54)
L , 9.9 N L9 55’
L 9,lO - L9,6,,
L 9.11 N L9.62.
One has g,, 1 - a,8 - g6.11 over C. This implies the following additional
isomorphisms of the algebras in the list above:
LP.9 9,32 - Lyp:&,
j-y.4 9.43 N La.
On the strength Of the isomorphisms g6,1 N g6,6, &, 13 N g6,35, g6.13 - g6,32?
g6,82 - g6,&9, Jy6.1 - -‘f&3, &6,5 ly 24~~ =‘%:i!? - 2@& and g6.62 - g6.92

REAL LIE ALGEBRAS 211
among the complex solvable algebras that form the radicals of nine-dimen- sional algebras that appear in Table 2, one obtains, respectively,
Lg;.j’ u Lg.;& . ’
LP.4 9.17 - L9p;&,
LP.4 9,1.3 - L&&>
Gb.5 , Iy L,P 27’
LP.q 9,28 N q);g,
L 9.37 N L9.42~
L 9,38 - L9*54)
L6.5, - G.53.
Finally, over the field C, transformations of the basis elements of the radicals g,,, and g,,,, are allowed that lead to the following isomolphisms, respec- tively:
L&Y u G,L
Gl,51 N L9.5~~
This work was supported in part by the Polish Interdisciplinary Research Project CPBP 01.03.
REFERENCES
D. Rand, P. Wintemitz, and H. Zassenhaus, On the identification of a Lie algebra
given by its structure constants. I. Direct decompositions, Levi decompositions,
and nilradicals, Linear Algebra Appl. 109:197-246 (1988).
P. Turkowski, Solvable Lie algebras of dimension six, J. Math. Phys. 31:1344-1350
0990).
P. Turkowski, Low-dimensional real Lie algebras, J. Moth. Hays. 29:2139-2144
(1988).
E. E. Levi, Sulla struttura dei gruppi finiti e continui, Ati Accad. Sci. Torino
40:551-565 (1905); reprinted in E. E. Levi, Opere, Vol. 1, Edizione Cremonese,
Rome, 1959, p. 101.

212 P. TURKOWSKI
5 N. Bourbaki, Elements of Mathemutks. Lie Groups and Lie Algebras (Part I: Chap. 1- 3), Hermann, Paris, 1975.
6 N. Jacobson, Lie Algebras, Interscience, New York, 1962. 7 D. W. Rand, P A S C A L programs for identification of Lie algebras III, Camput. Phys.
Comm. 46:311-322 (1987). 8 J. Patera, R. T. Sharp, P. Wintemitz, and H. Zassenhaus, Invariants of real low
dimension Lie algebras, J. Math. Phys. 17:986-994 (1976). 9 G. M. Mubarakzyanov, Classification of B-dimensional solvable Lie algebras which
possess a nilpotent basis element (in Russian), Izv. Vyssh. Ucheb. Zaved. Mat. 4(35):104-116 (1963).
Received 11 February 1991; final manuscript accepted 6 June 1991

Bibliografıa
[1] J. Dixmier, Certaines algebres non associatives simples definies par la transvection desformes binaires, Reine Angew Math. 346(1984), 110-128.
[2] K. Erdmann, M.J. Wildon, Introduction to Lie algebras, Undergraduate Mathematics Se-ries, Springer-Verlag, London, 2006.
[3] M.A. Gauger, On the classification of metabelian Lie algebras, Trans. Amer. Math. Soc.179 (1973) 293-329.
[4] Ming-Peng Gong, Classification of nilpotent Lie algebras of dimension 7 over algebraicallyclosed fields and R, Ph. D., Waterloo, Ontario (Canada), 1998.
[5] M. Goto, Note on a Characterization of Solvable Lie Algebras, J.Sci. Hiroshima Univ. Ser.A-I Math. Volume 26, Number 1 (1962)
[6] J.E.. Humphreys, Introduction to Lie algebras and representation theory, Graduate Textin Mathematics, vol. 9, 1972, Springer-Verlag, New York.
[7] N. Jacobson, Lie algebras, Dover Publications, Inc. New York, 1962.
[8] A.I. Malcev, Solvable Lie algebras, Izv. Akad. Nauk SSSR Ser. Mat. 9 (1945), 329-352;English transl., Amer. Math. Soc. Transl. (1) 9 (1962), 228-262. MR 9, 173.
[9] G.M. Mubarakzyanov, Classification of 6-dimensional solvable Lie algebras which possess anilpotent basis element (in Russian), Izv. Vyssh. Vcheb. Zaved. Mat. 4(35):104-116(1963).
[10] M.A. Rodriguez, ´
Algebras de Lie, Universidad Complutense, 2007.
[11] L. Snolb, On the structure of maximal solvable extensions and of Levi extensions of nilpo-tent Lie algebras, J. Phys. A: Math. Theory 43 (2) (2010) 505202 (17pp).
[12] P. Turkowski, Structure of Real Lie algebras, Linear Algebras and its applications 171:197-212 (1992).
67