INTRODUCCIÓN AL ANÁLISIS POR ELEMENTOS FINITOS EN …
242
ISBN: 978-958-8862-21-7 GUÍA DE CURSO FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA AMBIENTAL, CIVIL, MECÁNICA Y MECATRÓNICA INTRODUCCIÓN AL ANÁLISIS POR ELEMENTOS FINITOS EN MECÁNICA DE SÓLIDOS JAIRO F. USECHE V.
Transcript of INTRODUCCIÓN AL ANÁLISIS POR ELEMENTOS FINITOS EN …
ISBN: 978-958-8862-21-7
GU
ÍA D
E C
URSO
FACULTAD DE INGENIERÍAPROGRAMAS DE INGENIERÍA AMBIENTAL, CIVIL, MECÁNICA Y MECATRÓNICA
INTRODUCCIÓN AL ANÁLISIS POR ELEMENTOS FINITOSEN MECÁNICA DE SÓLIDOS JAIRO F. USECHE V.
GUÍA DE CURSOIntroducción al Análisis por
Elementos Finitosen Mecánica de Sólidos
PROFESOR: JAIRO F. USECHE V., M.Sc., Ph.D.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
RECTORJaime Eduardo Bernal Villegas
SECRETARIA GENERALIrina García Cáliz
VICERRECTOR ACADÉMICOWilliam Arellano Cartagena
VICERRECTORA ADMINISTRATIVAMaría del Rosario Gutiérrez de Piñeres Perdomo
DIRECTORA DE PLANEACIÓN Y GESTIÓN DE LA CALIDAD Patricia Velázquez Rodríguez
DIRECTOR DE EXTENSIÓN Y PROMOCIÓN INSTITUCIONAL Juan Carlos Robledo Fernández
DIRECCIÓN DE INVESTIGACIONES,EMPRENDIMIENTO E INNOVACIÓNJorge Del Río Cortina
DIRECCIÓN DE INTERNACIONALIZACIÓNEricka Duncan Ortega
DECANO FACULTAD DE EDUCACIÓN A DISTANCIA Jairo Useche Vivero
ISBN: 978-958-8862-21-7
Editorial Universidad Tecnológica de Bolívar
DiagramaciónDirección de Investigaciones, Emprendimiento e Innovación
Campus Casa Lemaitre: Calle del BouquetCra 21 No 25-92 PBX (5) 6606041 -42- 43 Fax: (5) 6604317
Campus Tecnológico: Parque Industrial y Tecnológico Carlos Vélez PomboPBX (5) 6535331 Fax: (5) 6619240
Cartagena de Indias, D. T. y C., - Colombiawww.unitecnologica.edu.co
juangabriel
Texto escrito a máquina
Prefacio
El presente documento ha sido desarrollado por el autor a partir de las notas de clase
empleadas en el curso de pregrado Análisis por Elementos Finitos, ofrecido por el autor
en el Departamento de Ingeniería Mecánica de la Universidad Tecnológica de Bolívar. El
texto ha sido concebido como una guía introductoria para estudiantes de ingeniería y
personas en general interesadas en aplicar el método de los elementos finitos en
mecánica de sólidos y estructuras. De esta manera se ha dejado de lado la rigurosidad
matemática involucrada, para enfocar el material hacia su aplicación práctica en
ingeniería.
El texto se enfoca en la aplicación del método en el análisis de problemas en elasticidad,
a través del desarrollo de una metodología de aplicación del método a problemas
particulares, dejando al lector la aplicación de dicha metodología al análisis de problemas
de interés e incluso al desarrollo de nuevos elementos.
El texto no trabaja con un software comercial específico para modelamiento por
elementos finitos, sino más bien incentiva al lector para que sea el quien implemente
computacionalmente el método a través de un lenguaje de programación, según sus
necesidades específicas. El texto presenta una implementación del método en el lenguaje
de programación MATLAB 6.1, el cual es ampliamente utilizado en ciencias e ingeniería a
nivel académico e industrial. Esta implementación es presentada en un capitulo especial
dedicado enteramente a la implementación del método de este lenguaje.
J. Useche,
Universidad Tecnológica de Bolívar, 2014
Contenido
Capítulo 1. Fundamentos Matemáticos
1.1 Introducción
1.2 Notación matricial y Definiciones
1.2.1 Matrices
1.2.2 Vectores
1.2.3 Matriz nula
1.2.4 Matriz cuadrada
1.2.5 Matriz diagonal
1.2.6 Matriz identidad
1.2.7 Matriz bandeada
1.2.8 Matriz triangular superior/inferior
1.2.9 Matrices simétricas y antisimétricas
1.2.10 Matriz ortogonal
1.2.11 Traza de una matriz
1.3 Igualdad, Adición y Sustracción de Matrices
1.3.1 Igualdad entre matrices
1.3.2 Suma (resta) de matrices
1.3.3 Propiedades de suma y multiplicación por escalar
1.4 Transposición de Matrices
1.5 Multiplicación de Matrices
1.5.1 Producto Interno
1.5.2 Producto Interior
1.6 Determinantes
1.6.1 Definiciones Básicas
1.6.2 Matrices Menores
1.6.3 Propiedades de los determinantes
1.6.4 Cofactores y Matriz Adjunta
11
11
12
12
12
13
13
13
13
14
14
15
15
16
16
16
17
17
17
18
18
20
20
20
21
21
22
1.7 Matrices Inversas
1.7.1 Definición de propiedades
1.7.2 Inversión de Matrices por cofactores
1.8 Rango y deficiencia de una Matriz
1.8.1 Rango de una Matriz
1.8.2 Deficiencia de Rango
1.9 Diferenciación Matricial
1.9.1 Derivada de una Matriz con respecto a un escalar
1.9.2 Derivada de un Vector con repecto a otro Vector
1.9.3 Integral de una Matriz
1.10 Autovalores y Autovectores
1.11 Teorema de Descomposición Espectral
1.12 Matrices Definidas Positivas
1.12.1 Matrices Reales
1.12.2 Positividad
Capítulo 2. Elasticidad Lineal
2.1 Definiciones e Hipótesis Principal
2.2 Deformación
2.2.1 Descripción del Movimiento
2.2.2 Deformaciones Unitarias
2.2.3 Tensor de Deformaciones Infinitesismales
2.2.4 Deformaciones en coordenadas cilíndricas
2.2.5 Deformación axial en una dirección cualquiera
2.3 Definición de esfuerzo
2.3.1 Fuerzas externas e internas
2.3.2 El Tensor de Esfuerzo
2.3.3 Relación entre el tensor y el ventor de esfuerzo
2.4 Ecuaciones de Equilibrio Interno
2.4.1 Ecuación de balance de la cantidad de movimiento
2.4.2 Ecuación de balance de Momentum Angular
2.5 Ley de Hooke Generalizada
22
22
23
25
25
25
26
26
27
28
29
32
34
34
35
37
37
38
38
42
45
48
48
50
50
51
52
56
56
60
61

2.5.1 Hipotesis de la teoría de la Elasticidad Lineal
2.5.2 Relaciones esfuerzo – deformación para Materiales Isotrópicos
2.5.3 Relaciones esfuerzo – deformación para Materiales Ortotrópicos
2.6 Termoelasticidad
2.6.1 Tensiones y deformaciones térmicas
2.6.2 Ecuación constitutiva termoelastica Lineal
2.7 Planeamiento General del problema Elástico
2.8 Elementos Estructurales
2.8.1 Barra con Carga Axial
2.8.2 Viga de Eules – Bernoulli
2.8.3 Barra Sometida a Torsión
2.8.4 Menbrana con carga distribuidad
2.9 “Vectores” de Tensión y de Deformación
Capitulo 3. Método de los Elementos Finitos
3.1 Introducción
3.2 Trabajo y energía de Deformación Unitaria
3.3 Energía de Deformación elástica
3.3.1 Energía de deformación de una barra
3.3.2 Energía de deformación de una Visa
3.3.3 Energía de deformación de un eje
3.4 Principio de los trabajos Virtuales
3.4.1 Potencial Elástico
3.5 Principio de los trabajos virtuales como forma débil de las
ecuaciones de gobierno.
3.6 El Método de Rayleing – Ritz
3.6.1 Formulación del Método
3.7 El Método de los Elementos Finitos
3.8 Generalización de la Formulación por Elementos Finitos
3.8.1 Minimización del potencial Elástico
3.9 Procedimiento general de Análisis
61
62
63
64
64
66
66
68
68
71
74
76
78
81
81
82
85
85
86
86
87
88
89
92
93
100
107
107
116
Capítulo 4. Análisis de Barras, Vigas y Ejes
4.1 Introducción
4.2 Barras sometidas a Fuerzas Axiales
4.2.1 Elementos Cuadráticos
4.3 Armaduras Planas
4.4 Armaduras Espaciales
4.5 Barras Bajo Fuerza Axial y Flexión
4.6 Barras con Momentos de Torsión
4.7 Marcos Planos
4.8 Marcos tridimensionales
Capítulo 5. Elasticidad Plana y problemas Aximetricos
5.1 Introducción
5.2 Esfuerzo Plano
5.2.1 Ecuaciones de Gobierno
5.2.2 Formulación por Elementos Finitos
5.3 Deformación Plana
5.4 Problemas Axisimetricos
5.4.1 Ecuaciones de Gobierno
5.4.2 Formulación por Elementos Finitos
Capítulo 6. Sólidos Elásticos
6.1 Introducción
6.2 Ecuación de Gobierno
6.3 Formulación por elementos finitos
119
119
120
126
131
139
142
150
151
154
157
157
158
158
160
178
181
182
183
187
187
188
189
Capítulo 7. Elementos Transformados
7.1 Introducción
7.2 Integración Numérica
7.2.1 Reglas de Integración Unidimensional
7.2.2 Integración Bidimensional y Tridimensional
7.3 Elementos Transformados
7.3.1 Elementos isoparametricos
Capítulo 8. Implementación Computacional
8.1 Introducción
8.2 Armaduras
8.2.1 Preprocesamiento
8.2.2 Modulo de Solución
8.2.3 Modulo de Postprocesamiento
8.2.4 Consideraciones Finales
8.3 Problemas Bidimesionales
8.3.1 Deformación Plana
197
197
198
198
200
204
208
217
217
219
219
221
226
230
231
231
Capitulo 1.
Fundamentos Matemáticos
1.1 Introducción
El capitulo presenta un repaso muy general de conceptos matemáticos fundamentales
para abordar adecuadamente el contenido del libro. Se inicia con las definiciones de
matrices y vectores, para luego abordar las operaciones básicas en álgebra matricial y
cálculo matricial. Igualmente se presentan matrices importantes como matrices simétricas,
antisimétricas y la matriz unitaria. Las operaciones entre matrices, así como la matriz
inversa y transpuesta, son presentadas.
La segunda parte del capitulo trata sobre los sistemas lineales de ecuaciones y los
métodos de solución numérica mas utilizados para la solución de sistemas de ecuaciones
lineales en elementos finitos. Por ultimo se aborda el tema de ecuaciones diferenciales
con valores en la frontera y condiciones iniciales y se presentan definiciones básicas. Por
ser un capitulo introductorio, se recomienda al estudiante consultar la bibliografía
relacionada al final del texto.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
11
1.2 Notación Matricial y Definiciones
1.2.1 Matrices
Una matriz es un arreglo rectangular de m filas y n columnas de números o cualquier otro
tipo de cantidades. En el libro designaremos a las matrices con letra mayúscula y en
negrilla, tal como se muestra a continuaciòn:
1 1 1 2 1 3
2 1 2 2 2 3
3 1 3 2 3 3
2 6 0 52 6
4 9 1 14 1
8 6 3 2
c c c
c c c
c c c
A B C
(1.1)
La matriz A es de tamaño (2x2) y la matriz B es de (3 x 4). La matriz C se encuentra
representada a través de sus elementos cij. Nótese que el primer subíndice representa la
fila a la cual pertenece el elemento y el segundo subíndice representa la columna. El
número de columnas y de filas de una matriz no necesariamente debe ser el mismo, tal
como se demuestra en las expresiones.
1.2.2 Vectores
Una matriz que conste únicamente de elementos ubicados en una fila sencilla es
denominada matriz fila. Similarmente, si los elementos se encuentran ubicados en una
columna sencilla, se conoce como matriz columna. Pero de forma general a una matriz fila
se le conoce como vector fila. Y a una matriz columna se le conoce como vector columna.
Por ejemplo:
1
-2 ; 1 5 2 8 ; 3 9 5 3 0 1
4
a b c
(1.2)
El vector a es un vector columna, mientras que los vectores b y c son vectores fila. Un
numero escalar puede ser considerado como una matriz de 1 x 1, lo cual indica que las
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
12

matrices son objetos matemáticos de mayor orden que contienen a los vectores y
escalares como casos particulares. Todos los vectores considerados en este libro se
trataràn como vectores columna, a no ser que se especifique lo contrario.
1.2.3 Matriz nula
Una matriz es nula cuando todos sus elementos son iguales a cero:
0 0 00 0
; 0 0 0 ; 0 0 0 00 0
0 0 0
0 0 0
(1.3)
1.2.4 Matriz Cuadrada
Una matriz es cuadrada cuando tiene igual numero de columas y de filas, es decir, m = n.
La matriz A y C en las expresiones (2.1) son ejemplos de matrices cuadradas.
1.2.5 Matriz Diagonal
Una matriz es diagonal cuando todos sus terminos son iguales a cero exceptuando
aquellos ubicados en la diagonal principal. Las matrices diagonales, por definiciòn, son
cuadradas. Por Ejemplo:
2 2 .3 0 0 0
0 4 .9 0 0
0 0 9 .8 0
0 0 0 4 5
R
(1.4)
1.2.6 Matriz Identidad
Es una matriz diagonal que solo contiene unos. Se representa con la letra I:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
13

1 0 0
0 1 0
0 0 1
I
(1.5)
1.2.7 Matriz Bandeada
Las matrices bandeadas son aquellas cuyos tèrminos distintos de cero se ubican al
rededor de su diagonal principal. Sus restantes tèrminos son iguales a cero:
6 2 .2 5 6
2 .2 5 1 .1 2 5 2 .2 5 0 .5 6 2
6 2 .2 5 1 2 1 .5 6
0 .5 6 2 1 .5 1 .2 5 0 1 2
6 0 .7 5 1 2 2 .2 5 6
1 2 2 .2 5 2 .1 2 5 3 1
6 3 6 3
1 3 2
c e r o s
c e r o s
(1.6)
Estas matrices son caracteristicas de los sistemas discretizados por metodos numèricos
de aproximaciòn para ecuaciones diferenciales, tal como el metodo de elementos finitos o
de diferencias finitas.
1.2.8. Matriz Triangular Superior/Inferior
Una matriz triangular superior posee todos sus elementos por debajo de su diagonal
principal iguales a cero, es decir, aij = 0 para toda i > j. en una matriz triangular inferior aij =
0 para toda i < j. Ejemplos:
1 2 5 4 1 0 0 0
0 9 7 0 2 9 0 0
0 0 1 3 5 7 1 0
0 0 0 9 4 1 0 6 9
U L
(1.7)
En este caso, U (upper) es una matriz triangular superior e L (lower) es triangular inferior.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
14

1.2.9 Matrices simétricas y Antisimètricas
Una matriz cuadrada es simètrica cuando se cumple: aij= aji. Por ejemplo:
1 3 5 2
3 9 8 0
5 8 1 1 1 3
2 0 1 3 1 9
S
(1.8)
En mecánica de cuerpos deformables, como se verá, el estado de esfuerzos en un punto
puede ser representado por una matriz de esfuerzos simétrica1, en el caso de cuerpos
elásticos lineales. De igual manera, las deformaciones unitarias (o las velocidades de
deformación en mecánica de fluidos) pueden ser descritas por matrices simétricas (matriz
de deformaciones unitarias).
Las matrices antisimètricas, son matrices cuadradas para las cuales se cumple: aij = -aji y
por tanto sus elementos en la diagonal son cero. Ejemplo:
0 1 5 2
1 0 7 1 0
5 7 0 4
2 1 0 4 0
W
(1.9)
Nótese que en una matriz Antisimétrica los términos de su diagonal principal deben ser
cero ya que esta es la única forma para que la condición aij = -aji se cumpla. En dinámica,
las rotaciones de cuerpo rígido son descritas por este tipo de matrices.
1.2.10 Matriz Ortogonal
Una matriz es ortogonal cuando cumple que su inversa sea igual a su matriz transpuesta:
AT = A-1 (para una definiciòn de estas operaciones ver las siguientes secciones). Ejemplo:
1 De manera exacta, sería representado por un tensor de esfuerzos simétrico, pero en este libro consideraremos
a los tensores como matrices.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
15

1 2 1 6 1 3
1 2 1 6 1 3
0 2 6 1 3
Q
(1.10)
Esta matriz es ortogonal. (verifique la condición: QT = Q-1, o lo que es lo mismo: QQT = I,
para demostrar que la matriz Q es ortogonal).
1.2.11 Traza de una matriz
La traza de una matriz se define como la sumatoria de los componentes de la diagonal en
una matriz:
( )i i
T r B B (1.11)
Por ejemplo:
3 1 9
0 7 6 ( ) 3 7 5 1 5
8 4 5
T r
B B
La traza de una matriz se encuentra definida únicamente para matrices cuadradas.
1.3 Igualdad, Adición y Sustracción de Matrices
1.3.1 Igualdad entre matrices
Dos matrices son iguales si y solo sí tienen el mismo numero de filas y columnas y si los
elementos correspondientes son iguales:
,m n p q
ij i jW M m p n q
W M
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
16

La suma (resta) de dos matrices (y por tanto de dos vectores) solo es posible si tienen el
mismo tamaño. Si es así, la suma (resta) es igual a la suma de sus componentes. Por
ejemplo:
4 3 5 9 6 2 1 3 9 7
2 1 8 7 5 9 9 6 1 7
7 1 1 4 3 1 4 1 0 1 2 8
A B C A B
1.3.3 Propiedades de suma y multiplicación por escalar
Las operaciones entre matrices (y vectores) cumplen las siguientes propiedades:
A B B A
A B C A B C
A B B A
(1.12)
Por ejemplo:
9 6 2 2 2 .5 1 5 5
7 5 9 2 .5 2 .5 1 7 .5 1 2 .5 2 2 .5
3 1 4 7 .5 2 .5 1 0
y
B B B
1.4 Transposición de Matrices
La transpuesta de una matriz se determina intercambiando filas por columnas. Esta
operación es aplicable a matrices de cualquier tamaño. Ejemplo:
2 1 52 9 0
9 81 5 8 3
0 3
3 1 9 3 0 8
0 7 6 1 7 4
8 4 5 9 6 5
T
T
A A
B B
1.3.2 Suma (resta) de Matrices
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
17

1.5 Multiplicación de Matrices
1.5.1 Producto Interno
El producto punto entre dos matrices está definido como:
, ,
1
n
ij k j i k
k
C A B
C A B (1.13)
Lo cual genera una matriz de tamaño m x p sí A es tamaño m x n y B es de n x p. Por
ejemplo:
4 3 5 9 6 2 7 2 4 4 5 5
2 1 8 7 5 9 4 9 2 5 4 5
7 1 1 4 3 1 4 1 5 2 1 0 1 1 2 9
A B C A B
Por ejemplo, el tèrmino:2 ,1
4 9 2 9 7 1 8 3C , el cual se obtiene multiplicando la fila
2 de la matriz A por la columna 1 de la matriz B. Los restantes términos se hallan de
manera similar.
El proceso de multiplicaciòn puede extenderse a productos de mas de dos matrices,
siempre y cuando las matrices adyacentes en el producto puedan multiplicarse segùn
(2.14). Por lo tanto la secuencia de la multiplicaciòn debe ser preservada. Las
propiedades del producto punto de dos matrices son:
( ) ( )T TT
T T T T T
T T
T T
A ( B + C ) A B A C
A B C = A ( B C ) = ( A B )C
A B B A
A B C D D C B A
A B A B
a b b a
(1.14)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
18

Hay que tener en cuenta que en general AB BA.
Ejemplo. Determinar el producto: S = BTKB sí:
4 .3 3 .1 5 9 6 2
3 .1 1 8 7 5 9
5 8 2 3 1 4
K B
Solución. La operación a realizar es la siguiente:
9 7 3 4 .3 3 .1 5 9 6 2
6 5 1 3 .1 1 8 7 5 9
2 9 4 5 8 2 3 1 4
T
S B K B
Este producto pueden ser hallado empleando la propiedad: BTKB = BT(KB). Hallando el
producto KB se obtiene:
4 .3 3 .1 5 9 6 2 7 5 .4 4 6 .3 5 6 .5
3 .1 1 8 7 5 9 5 8 .9 3 1 .6 4 7 .2
5 8 2 3 1 4 1 0 7 7 2 9 0
K B
Realizando el producto BT(KB) se obtiene:
9 7 3 7 5 .4 4 6 .3 5 6 .5 1 .4 1 1 9 0 .8 5 3 9 1 .1 0 8 9
6 5 1 5 8 .9 3 1 .6 4 7 .2 1 0 0 0 0 .8 5 3 9 0 .5 0 7 8 0 .6 6 5 0
2 9 4 1 0 7 7 2 9 0 1 .1 0 8 9 0 .6 6 5 0 0 .8 9 7 8
T
S B K B
Por otra parte, el producto interno aplicado a vectores se conoce como producto escalar,
ya que su resultado es un escalar. Por ejemplo:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
19

1 1
1 2 4 ; 6 . 1 2 4 6 1 1 2 6 4 9 2 5
9 9
q r q r
Definimos como magnitud (o norma) de un vector la expresión:
2 2 2
1 2.
T
na a a a a a (1.15)
Por último, debe recordarse que la división entre dos matrices no se encuentra definida ya
que no existen infinito número de matrices que cumplen la relación A/B si A y B son las
matrices consideradas.
1.5.2 Producto Interior
El producto interior de una matriz se define como:
, , 1 ,1 1 ,1 1 , 2 1 , 2 1 ,3 1 ,3 , ,
1 1
:
m n
i j i j m n n n
i j
A B A B A B A B A B
A B (1.16)
Por ejemplo:
4 3 5 9 6 2
2 1 8 7 5 9
7 1 1 4 3 1 4
: 4 9 3 6 5 2 2 7 1 5 8 9 7 3 1 1 1 4 4 2 0 3
A B
A B
1.6 Determinantes
1.6.1 Definiciones Básicas
Sea A una matriz de 2x2. Se define el determinante de esta matriz como:
(1.17) 1 1 1 2
1 1 2 2 1 2 2 1
2 1 2 2
d e t( )a a
a a a aa a
A A A
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
20

Uno de los aspectos importantes del determinante es que este nos indica si una matriz es
invertible, ya que se demuestra que lo es si y solo sí det(A) 0, lo cual es valido para
matrices de n x n.
1.6.2 Matrices Menores
Para el caso de una matriz de 3 x 3 se tiene:
1 1 1 2 1 3
2 2 2 3 2 1 2 3 2 1 2 2
2 1 2 2 2 3 1 1 1 2 1 3
3 2 3 3 3 1 3 3 3 1 3 2
3 1 3 2 3 3
1 1 1 1 1 2 1 2 1 3 1 3
d e t( )
d e t( )
a a aa a a a a a
a a a a a aa a a a a a
a a a
a M a M a M
A A A
A A
(1.18)
A las matrices conformadas por los términos de Mij se les denominan matrices menores
de A. Por inducción se obtiene la expresión general para el determinante de una matriz de
n x n:
1 1 1 1 1 1 1 2 1 2 1 3 1 3 1 1
1
d e t( )
n
k K n n
k
a A a A a A a A a A
A A (1.19)
1.6.3 Propiedades de los determinantes
El determinante de una matriz presenta las siguientes propiedades:
d e t ( ) d e t ( )
d e t ( + ) = d e t ( )+ d e t ( )
d e t ( ) = d e t ( )d e t ( )
T
A A
A B A B
A B A B
(1.20)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
21
1. El intercambio de dos filas o columnas en una matriz, el signo de su determinante
cambia.
2. Si dos columnas o filas de un determinante son identicas, el valor del determinante es
cero.
3. Si todos los elementos de una fila o columna son cero, el determinante es cero.
4. La multiplicaciòn por una constante c de todos los elementos en una fila o columna de
un determinante A , resulta en un determinante de valor c A .
5. El determinante de una matriz triangular superior (o inferior) es igual al producto de los
elementos de su diagonal principal.
6. La adiciòn de un multiplo de una columna o fila a los correspondientes elementos de
cualquier otra fila o columna, mantiene el valor del determinante.
1.6.4 Cofactores y Matriz Adjunta
Los cofactores de una matriz A estàn definidos como:
( 1)i j
i j
i jA M (1.21)
Sea A una matriz cualquiera, a la matriz conformada por los cofactores de A se le
denomina matriz adjunta de A., denominada por adj(A).
1.7 Matrices Inversas
1.7.1 Definición y Propiedades
La inversa de una matriz se define como aquella matriz con la cual se cumple la siguiente
expresión:
Propiedades adicionales:
1A A I (1.22)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
22

Donde A-1 se define como matriz inversa de A. Una matriz que no es invertible se le
conoce como matriz singular. La inversa de una matriz solo está definida para matrices
cuadradas.
Se tienen las siguientes propiedades que involucran la inversa y la transpuesta de una
matriz. Sea A una matriz cuadrada cualquiera, entonces se cumple:
1 1 1
11
1 1 1 1 1
( ) ( )T TT
A B A B
A A A
A B C D D C B A
(1.23)
1.7.2 Inversiòn de Matrices por Cofactores
La matriz adjunta puede ser utilizada para determinar la inversa de una matriz cualquiera,
siempre que se demuestre que su determinante no es cero. Para esto se tiene el siguiente
teorèma fundamental del algebra matricial:
1
a d jd e t( )
1
A ( A )A
(1.24)
Donde adj(A) es la matriz adjunta de A.
Ejemplo. Determine si B es invertible y, si lo es, calcule B-1:
1 3 0 2
3 1 2 2 6
2 1 0 2 5
1 6 1 3
B
^
Solución. La matriz B es invertible si y solo sí det(B) 0. De esta manera:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
23

1 2 2 6 3 2 6 3 1 2 6
d e t( ) 1 * d e t 1 0 2 5 ( 3 ) d e t 2 2 5 0 d e t 2 1 0 5
6 1 3 1 1 3 1 6 3
3 1 2 2
( 2 ) d e t 2 1 0 2
1 6 1
B
d e t( ) 1 1 2 ( 2 3 1 5 ) ( 2 ) (1 0 3 6 5 ) ( 6 ) (1 0 1 6 2 )
3 3 ( 2 3 1 5 ) ( 2 ) ( 2 3 ( 1) 5 ) ( 6 ) ( 2 1 ( 1) 2 )
2 3 (1 0 1 6 2 ) ( 1 2 ) ( 2 1 ( 1) ( 2 ) ) ( 2 ) ( 2 6 ( 1) 1 0 )
d e t( ) 0 3 4 1
B
B
Por lo tanto B es invertible (ya que su determinante es distinto de cero). Ahora la matriz
adjunta de B se construye como:
1 1 1 2
1 ,1 1 , 2
1 3 1 4
1 ,3 1 , 4
1 2 2 6 3 2 6
( ) ( ) d e t 1 0 2 5 0 ; ( ) ( ) d e t 2 2 5 1;
6 1 3 1 1 3
3 1 2 6 3 1 2 2
( ) ( ) d e t 2 1 0 5 0 ; ( ) ( ) d e t 2 1 0 2 2 ;
1 6 3 1 6 1
c o f A c o f A
c o f A c o f A
1 1
1 1
Similarmente se determinan las restantes componentes para obtener:
0 1 0 2
1 1 2 2( )
0 1 3 3
2 2 3 3
A d j B
Entonces: 0 1 0 2
1 1 2 2( )
0 1 3 3d e t ( )
2 2 3 2
1 a d j BB
B
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
24

1.8 Rango y Deficiencia de una Matriz
1.8.1 Rango de una Matriz
Si el determinate de una matriz A de n x n es cero, significa que la matriz es singular, es
decir, no invertible. Esto significa que por lo menos una columna y una fila son linealmente
dependiente de otras. Si retiramos estas filas y columnas, obtenemos una matriz reducida
de n-1 x n-1 componentes. Si nuevamente esta matriz es singular, podemos retirar las
filas y las columnas dependientes. Asì podemos repetir el procedimiento y llegar a una
matriz reducida de r x r no singular. Entonces decimos que la matriz A es de rango r. Lo
anterior es importante, porque como se verà, la matriz de rigidez de un elemento es
singular, y su rango està relacionado con modos de movimiento de cuerpo rigido y modos
espurios de deformaciòn.
Ejemplo
La matriz del ejemplo XX tiene rango 4, ya que su determinante es distinto de cero. Pero
la matriz:
3 2 1
1 2 1
2 1 3
C
Es singular ya que la primera fila y columna puede ser expresada como conbinaciòn lineal
de las restantes. Retirando la primera fila y la primera columna se llega a una matriz
reducida de 2 x 2 no singular. Por lo tanto C tiene rango r=2.
1.8.2 Deficiencia de Rango
Si una matriz cuadrada A con supuesto rango r pero en realidad presenta rango mas
pequeño r* con r*< r, se dice entoces que la matriz tiene deficiencia de rango. La
deficiencia de rango de una matriz està dada por: r-r*>0. Un ejemplo muy claro de esto, se
presenta en las matrices de ciertos elementos, los cuales, ademas de los modos de
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
25

cuerpo rigido, presenta modos espureos de deformaciòn. Estas matrices presentan
entonces deficiencia de rango, ya que el rango supuesto r = n-b, donde n es el tamaño de
la matriz y b el numero de modos de cuerpo rigido, en realidad es afectado por los modos
espureos de deformaciòn, generando entonces en una matriz con rango r*<n-b. La
deficiencia de rango es una propiedad ideseable en las matrices de rigidez de los
elementos.
1.9 Diferenciaciòn Matricial
1.9.1 Derivada de una Matriz con respecto a un escalar
Las componentes de los vectores y matrices pueden ser tambien expresiones
algebraicas:
3
2
5
3s in ( 2 )
3 12 2 3
/ 3 0 4
xx x x yy
x yx y x x
x x y
x
M
En general todas las operaciones de cálculo diferencial e integral son extensibles y
aplicables a operaciones que involucran matrices y/o vectores. La derivada de una matriz
con respecto a una variable cualquiera es igual a la derivada individual de cada una de
sus componentes con respecto a esa variable. Entonces, para una matriz B cualquiera se
tiene:
i j
B
x x
B (1.25)
Ejemplo. Determinar y
B sì:
2
2 3
2 3 5 s in ( )
2 3
ta n h ( ) 9
x x y x
y x y z
z x
B
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
26

Soluciòn.
2
0 2 0
2 3 0
0 9 0
x
y
B
y
Como caso particular, la derivada de un producto de matrices es igual a:
x x x
A B A BB A (1.26)
Debe resaltarse que el orden de los términos debe mantenerse.
1.9.2 Derivada de un Vector con Respecto a otro Vector
La derivada de un vector u cualquiera de m componentes con respecto a un vector x
cualquiera de n componentes està definida por la matriz:
1 2
1 1 1
1 2
2 2 2
1 2
m
m
i
j
m
n n n
uu u
x x x
uu uu
x x xu
uu u
x x x
u
x (1.27)
Si se define una matriz cualquiera como: A u x , al determinante de esta matriz se le
denomina Jacobiano.El jacobiano de una matriz juega un papel importante en la
transformaciòn de coordenadas y serà empleado en la formulaciòn de elementos
distorsionados.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
27

1.9.3 Integral de una matriz
La integral de una matriz B cualquiera con respecto a una variable, digamos x, es
obtenida a través de la integración separada de cada uno de sus términos:
( ) ( )i j i j
x d x B x d x cB (1.28)
Donde cij es una matriz de constantes de integración. En la anterior expresión cij
representan constantes de integración.
Ejemplo. Hallar ( )x d xB sì:
2 3
s in (3 ) 1 /
2
k x x
b x x x
B
Solución.
1 2
3 4
3 42
c o s (3 ) ln ( )3
( )
3 4
kx x
c cx d x
c cb x xx
B
Ejemplo 1.6.2. Demuestre las siguientes integrales:
1
2
0
0 0
0
( )
( )
T T
T T
a d
b d
D ε ε ε D ε
σ ε ε σ
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
28

Solución
1 1 1
2 2 2
0 0
( )T T T T T
a d d
D ε ε e D e n De e D e ε D ε
0 0 0 0 0
0
( )T TT T T
b d
σ ε σ ε e e e e ε σ
1.10 Autovalores y Autovectores
Consideremos la soluciòn de una forma especial del sistema lineal de ecuaciones (2.27),
en el cual los tèrminos del lado derecho de la ecuaciòn son multiplos del vector de
incognitas x:
1 1 1 2 1 3 1 1 1
2 1 2 2 2 3 2 2 2
3 1 3 2 3 3 3 3 3
1 2 3
n
n
n
m m m m n n n
a a a a x x
a a a a x x
a a a a x x
a a a a x x
A x x (1.29)
Este problema es conocido como problema clasico de autovalores, el cual se presenta en
diversas aplicaciònes en mecànica. Los autovalores λ permiten describir los esfuerzos
principales en un solido deformable. Tambien describen las frecuencias naturales de
oscilaciòn, por ejemplo. Para cada autovalor existe un autovector que tambien permite
interpretaciones fisicas en mecànica: las direcciones principales de esfuerzo o de
deformaciòn, se encuentran descritas por autovectores, al igual que los modos de
oscilaciòn de un cuerpo. El sistema de ecuaciones (2.XX) puede ser reescrita en forma
homogenea como:
A I x 0 (1.30)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
29

Una solución no trivial a este problema es encontrada si la matriz de coeficientes A
es singular, para lo cual requerimos:
1 1 1 2 1 3 1
2 1 2 2 2 3 2
3 1 3 2 3 3 3
1 2 3
d e t 0
n
n
n
m m m m n
a a a a
a a a a
a a a a
a a a a
A (1.31)
Al expandir este determinante encontramos la ecuaciòn caracterìastica de la matriz A:
1
1( ) 0
n n
nP
(1.32)
El polinomio de grado n en el lado izquierdo es conocido como polinomio caracteristico de
A. En general este polinomion tendrà n raices complejas n
, conocidas como autovalores
o valores caracterìasticos de la matriz A. Para cada autovalor i
existe asociado un
autovector i
x que cumple la relaciòn:
i i iA x x (1.33)
Ejemplo. Determinar los autovalores y autovectores de la matriz:
6 6 0
6 8 2
0 2 2
U
6 6 0
6 8 2
0 2 2
U
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
30

Solución. Los autovalores de U son obtenidos a través del polinomio característico:
3 2
6 6 0
d e t 6 8 2 1 6 3 6 0
0 2 2
U I
Con lo cual se obtiene: 1 2 3
0 2 4 7 2 4 7 . Ahora, los autovectores
son hallados como:
Para 1
0 :
2
2
3
3
6 6 0 1 0 18 2 6
6 8 2 0 12 2 0
0 2 2 0 1
vv
vv
1v
con el autovector normalizado: 1
0 .5 7 7 3 0 .5 7 7 3 0 .5 7 7 3v .
Para 2
2 4 7 :
2
2 2
3
3
3 .2 9 1 5 6 0 1 0 15 .2 9 1 5 2 6
6 5 .2 9 1 5 2 0 0 .5 4 8 62 0 .7 0 8 5 0
0 2 0 .7 0 8 5 0 1 .5 4 8 6
vv
vv
v
con el autovector normalizado: 2
0 .5 1 9 9 0 .2 8 5 2 0 .8 0 5 2v .
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
31
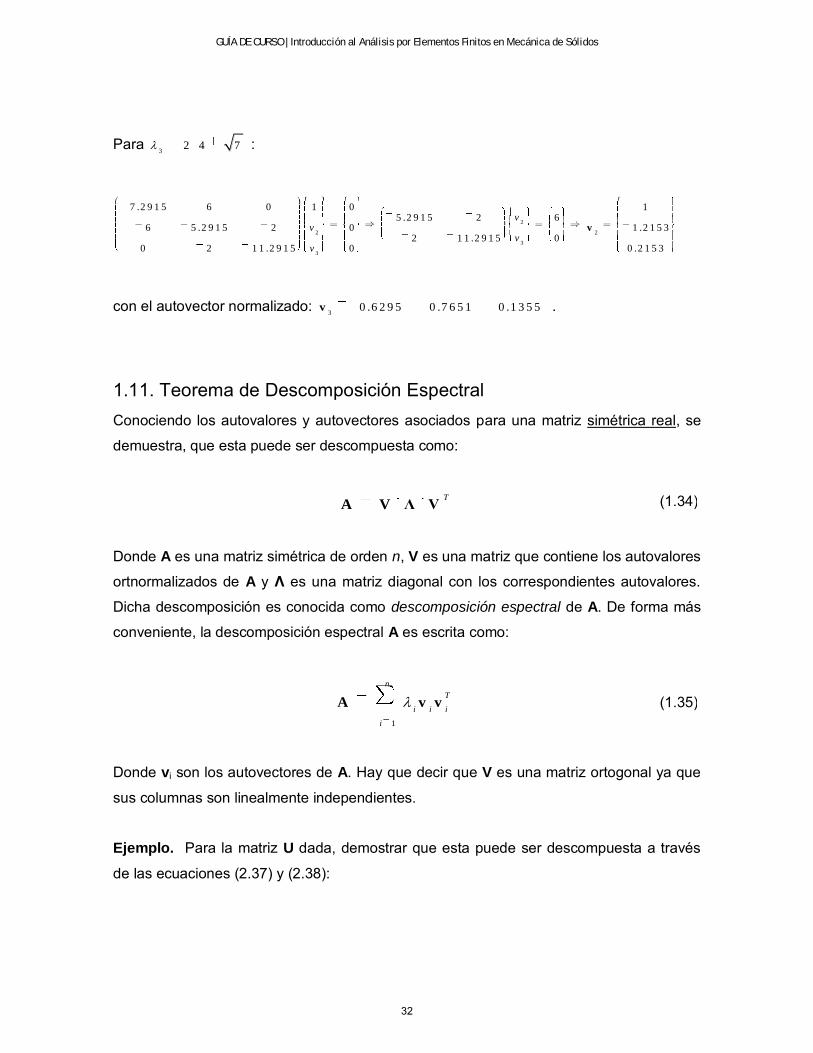
Para 3
2 4 7 :
2
2 2
3
3
7 .2 9 1 5 6 0 1 0 15 .2 9 1 5 2 6
6 5 .2 9 1 5 2 0 1 .2 1 5 32 1 1 .2 9 1 5 0
0 2 1 1 .2 9 1 5 0 0 .2 1 5 3
vv
vv
v
con el autovector normalizado: 3
0 .6 2 9 5 0 .7 6 5 1 0 .1 3 5 5v .
1.11. Teorema de Descomposición Espectral
Conociendo los autovalores y autovectores asociados para una matriz simétrica real, se
demuestra, que esta puede ser descompuesta como:
TA V Λ V (1.34)
Donde A es una matriz simétrica de orden n, V es una matriz que contiene los autovalores
ortnormalizados de A y Λ es una matriz diagonal con los correspondientes autovalores.
Dicha descomposición es conocida como descomposición espectral de A. De forma más
conveniente, la descomposición espectral A es escrita como:
1
n
T
i i i
i
A v v (1.35)
Donde vi son los autovectores de A. Hay que decir que V es una matriz ortogonal ya que
sus columnas son linealmente independientes.
Ejemplo. Para la matriz U dada, demostrar que esta puede ser descompuesta a través
de las ecuaciones (2.37) y (2.38):
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
32

Solución. Los autovalores y autovectores de U fueron hallados en el ejemplo anterior. A
partir de estos se obtienen las matrices V y Λ, con lo cual se obtiene:
0 .5 7 7 3 0 .5 1 9 9 0 .6 2 9 5 0 0 .5 7 7 3 0 .5 7 7 3 0 .5 7 7 3 6 6 0
0 .5 7 7 3 0 .2 8 5 2 0 .7 6 5 1 2 .7 0 8 4 0 .5 1 9 9 0 .2 8 5 2 0 .8 0 5 2 6 8 2
0 .5 7 7 3 0 .8 0 5 2 0 .1 3 5 5 1 3 .2 9 1 5 0 .6 2 9 5 0 .7 6 5 1 0 .1 3 5 5 0 2 2
TU V Λ V
O equivalentemente:
1
0 .5 1 9 9
2 .7 0 8 4 0 .5 1 9 9 0 .2 8 5 2 0 .8 0 5 2 0 .2 8 5 2
0 .8 0 5 2
0 .6 2 9 5 6 6 0
1 3 .2 9 1 5 0 .6 2 9 5 0 .7 6 5 1 0 .1 3 5 5 0 .7 6 5 1 6 8 2
0 .1 3 5 5 0 2 2
n
T
i i i
i
U v v
.
La descomposición espectral de una matriz permite realizar de forma efectiva importantes
aplicaciones. Por ejemplo la k-esima potencia (siendo k real) de una matriz se define
como:
1k kA A A A A A (1.36)
Puede ser evaluada descomponiendo espectralmente A, así:
k k TA V V (1.37)
También, la descomposición espectral de una matriz permite calcular la inversa de una
matriz. Es fácil demostrar que:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
33
1 1 TA VΛ V (1.38)
donde:
1 1
i j
i i
(1.38b)
O empleando (2.38):
1
1
1n
T
i i
i i
A v v (1.39)
Se observa que el anterior resultado solo es aplicable cuando A no posea autovalores
nulos, lo cual es directamente registrado en Λ. Lo anterior significa que A es singular (no
posee inversa), ya que Λ-1 no puede ser calculada. En este contexto es preciso definir la
siguiente terminología.
1.12 Matrices Definidas Positivas
1.12.1 Matrices Reales
Las matrices reales son de importancia especial en el método de los elementos finitos. De
hecho las matrices de rigidez de los elementos en mecánica de sólidos son matrices
reales definidas positivas. Estas matrices presentan las siguientes características:
1. Los n autovalores de una matriz real simétrica de n x n son reales.
2. Loas autovectores correspondientes a los autovalores son ortogonales. Y aquellos
autovectores de autovalores repetidos pueden ser ortogonalizados uno con respecto a
los otros.
3. Los n autovectores forman una base ortonormal en el espacio Euclidiano En.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
34
Una matriz A simétrica real de n x n se dice positiva definida con rango r = n sí todos sus
autovalores son reales positivos y distintos de cero. Un ejemplo de este tipo de matrices,
son las matrices globales en la formulación por elementos finitos en mecánica de sólidos.
Como contraparte, una matriz es denominada positiva semidefinida, si todos sus
autovalores son mayores o iguales a cero. Y una matriz es dicha indefinida si presenta
autovalores negativos positivos y nulos. Al producto del lado izquierdo de (2.XX) se le
denomina forma cuadrática de la matriz A.
1.12.2 Positividad
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
35

Capitulo 2.
Elasticidad Lineal
2.1 Definiciones e Hipotesis Principales
Consideraremos en este ese estudio cuerpos que a un nivel microscópico pueden ser
considerados como compuestos de un material que se encuentra continuamente
distribuido. Es decir, se consideran cuerpos cuyas dimensiones son muy superiores a la
separación de las moléculas y átomos que constituyen, así como también a las
dimensiones de los defectos cristalinos y microscópicos que pueda presentar el cuerpo.
De allí proviene el concepto de medio continuo. Esto significa que:
1. Dicho cuerpo ocupa una región del espacio tridimensional identificada como 3. La
región ocupada por el cuerpo variará con el tiempo a medida que el cuerpo se deforma.
Es conveniente por lo tanto para describir la evolución de un cuerpo en el tiempo,
identificar cualquier punto en el cuerpo por su vector de posición X en una configuración
de referencia, la cual es tomada por simplicidad como la configuración en la cual se
asume que el cuerpo se encuentra no deformado y libre de esfuerzos Igualmente se
considera este estado en el tiempo t = 0. La región del espacio ocupada por el espacio en
este tiempo es denotada por y es conocida como configuración de referencia. Entonces
todos los puntos que conforman el cuerpo se encuentran en t = 0 identificados por su
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
37
vector de posición X tal que X , es decir, pertenece a la región del espacio ocupado
inicialmente por el cuerpo. A estos puntos se les conoce como puntos materiales (figura
2.1).
2. Se asume que tanto la propiedades y el comportamiento de dicho cuerpo pueden ser
descritas en términos de funciones de posición X y del tiempo t. Así, por ejemplo,
podemos asociar con el cuerpo una distribución de temperatura escalar T que varía
dentro del cuerpo y con el tiempo, de tal manera que el valor de temperatura en un punto
X en un tiempo t es representada por la función T(X,t), ó equivalentemente por T(X,Y,Z,t).
Asumiremos en este momento que las funciones empleadas para describir propiedades o
comportamientos serán derivables tantas veces como sea requerido en las ecuaciones
diferenciales de gobierno que rigen un problema particular.
El estudio del comportamiento de medios continuos empieza convenientemente con un
desarrollo adecuado de las ecuaciones que describen el movimiento de cada punto
material, independientemente de la causa que lo origine e independientemente del
material que constituye al cuerpo. Dichas ecuaciones son conocidas como ecuaciones
cinemáticas y son desarrolladas solamente a partir de consideración geométricas del
movimiento.
2.2 Deformación
2.2.1 Descripción del Movimiento
Como se mencionó anteriormente, la posición de un cuerpo en un estado no deformado
es identificada con una región en 3. Con el tiempo, el cuerpo se traslada, rota y se
deforma, como resultado de la acción de fuerzas externas e internas, las cuales no son de
interés analizar en este momento, de tal manera que en un tiempo t ocupa una nueva
región t denominada configuración actual ó configuración deformada (figura 2.1). Así, la
deformación de un cuerpo puede ser descrita matemáticamente por a través de un vector
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
38
de desplazamiento en función de la posición inicial del punto y del tiempo: u(x,y,z,t), ya
que los cuerpos deformables se caracterizan porque cada partícula material que lo
compone experimenta un desplazamiento distinto. Este vector puede ser escrito en
coordenadas rectangulares como:
( , , , )
( , , , ) ( , , , )
( , , , )
u x y z t
x y z t v x y z t
w x y z t
u
(2.1)
Para todo X y t [0,T]. En esta expresión, u, v, w, son las componentes de
desplazamiento en la dirección de los ejes coordenados. La figura 2.1 muestra como se
desplaza una partícula dentro del cuerpo y como este hecho hace que el cuerpo cambie
de forma (se deforme). La posición final de una partícula en el cuerpo deformado está
dada por:
( , , , ) ( , , , ) ( , , , )x y z t x y z t x y z t x X u (2.2)
El vector de desplazamiento debe satisfacer ciertas condiciones si se pretende modelar
adecuadamente el movimiento de un cuerpo:
1. Debe asegurarse que dos puntos distintos en el estado no deformado no sean
mapeados por u a un mismo punto en la configuración deformada. Lo anterior
establece el hecho físico de que dos puntos no pueden ocupar el mismo espacio en el
mismo tiempo. Matemáticamente esto se establece diciendo que u debe ser una
función uno a uno y sobreyectiva (que mapee todos los puntos).
2. u debe mapear todo elemento con volumen cero en a un elemento de volumen cero
en t y que un volumen finito en el estado no deformado no sea mapeado como un
elemento con volumen negativo. Ambos aspectos son hechos físicos.
Matemáticamente:
d e t 0J
u
X (2.3)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
39
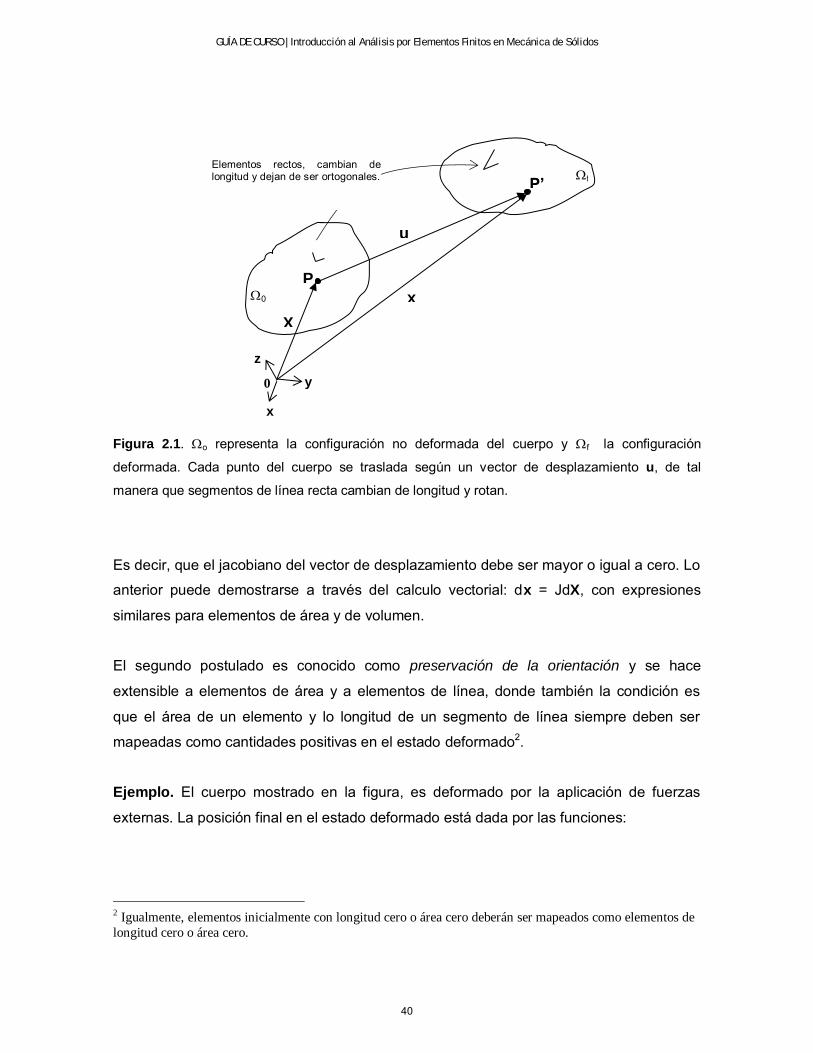
Figura 2.1. o representa la configuración no deformada del cuerpo y f la configuración
deformada. Cada punto del cuerpo se traslada según un vector de desplazamiento u, de tal
manera que segmentos de línea recta cambian de longitud y rotan.
Es decir, que el jacobiano del vector de desplazamiento debe ser mayor o igual a cero. Lo
anterior puede demostrarse a través del calculo vectorial: dx = JdX, con expresiones
similares para elementos de área y de volumen.
El segundo postulado es conocido como preservación de la orientación y se hace
extensible a elementos de área y a elementos de línea, donde también la condición es
que el área de un elemento y lo longitud de un segmento de línea siempre deben ser
mapeadas como cantidades positivas en el estado deformado2.
Ejemplo. El cuerpo mostrado en la figura, es deformado por la aplicación de fuerzas
externas. La posición final en el estado deformado está dada por las funciones:
2 Igualmente, elementos inicialmente con longitud cero o área cero deberán ser mapeados como elementos de
longitud cero o área cero.
0
f
x
y
z
0
u
X
x
P
P’ P’
Elementos rectos, cambian de longitud y dejan de ser ortogonales.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
40

(a) Determinar el campo de desplazamiento y dibujar el cuerpo deformado.
(b) Determinar J y hacer una grafica J(X,Y) e indicar si todos los puntos del cuerpo
cumplen con la condición: J0.
Solución.
(a) El campo de desplazamiento puede ser determinado a partir de la expresión (2.2):
5 .2 5 + X (1 .7 5 -0 .2 5 Y )-0 .7 5 Y 5 .2 5 + X (0 .7 5 -0 .2 5 Y )-0 .7 5 Y
5 .7 5 + X (1 .2 5 + 0 .2 5 Y )+ 1 .7 5 Y 5 .7 5 + X (1 .2 5 + 0 .2 5 Y )+ 0 .7 5 Y
x
y
u X
u Y
La geometría deformada del cuerpo se muestra en la siguiente figura, la cual muestra
como el cuerpo se traslada, rota y se deforma. Pueden verificarse las coordenadas finales
X
Y
x = 1.75+X(5.25-0.75Y)-0.25Y
y = 2.75-1.25Y+X(4.25+3.25Y)
X
Y
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
41
de los vértices (y de cualquier otro punto en el cuerpo) a través de las ecuaciones dadas
por el problema.
El determinante de la matriz jacobiana es calculado empleando la ecuación (2.3):
3d e t
2
yx
y yi x x
yj x
uu
u uu u u Xx xJ
uu u x y y x
y y
(2.4)
Con lo cual se obtiene: 3X . Se demuestra entonces que se cumple la condición de
función 1:1 y sobreyectiva impuesta para el campo de desplazamiento, ya que 1 1X .
Es interesante observar que para un punto cualquiera dentro del cuerpo, J no depende de
la coordenada Y, en este caso.
En el ejemplo anterior el valor de J muy superior a 1, valores que no cubre la teoría de la
elasticidad, limitándose, esta según su principal restricción que establece que: 1J , de
tal manera que los desplazamientos, las deformaciones lineales y por consiguiente el
cambio de área y de volumen de los cuerpos son pequeños, siendo estos últimos
despreciables.
2.2.2 Deformaciones Unitarias
La mecánica de cuerpos deformables, se enfoca principalmente en las deformaciones que
el cuerpo puede sufrir, es decir, en los cambios en la posición relativa de las partículas
que lo constituyen, en cualquier parte interna.
Las deformaciones implican, por lo general, desarreglos sumamente complicados que
pueden ser descritos idealmente como la superposición de deformaciones longitudinales y
deformaciones angulares.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
42

Figura 2.2. Izquierda: Debido a la deformación del medio, los punto O, A, B se desplazan a las
posiciones O’, A’, B’. Derecha: Esquema de la deformación angular.
Consideremos tres puntos O, A, B internos a un cuerpo, y supongamos que sus puntos
materiales se desplacen, respectivamente a las posiciones O’, A’, B’ (figura 1.2a.).
Diremos que el cuerpo ha sido deformado si, por lo menos una de las distancias OA, OB o
el ángulo BOA, experimentan una variación durante el movimiento del cuerpo.
Una variación en la longitud de un segmento puede medirse en forma intensiva
considerando su longitud inicial y su longitud en una configuración final dada:
f o
l
o
l ll
l l
(2.5)
a la cual se da el nombre de deformación longitudinal unitaria o elongación sufrida por un
segmento de linea recta en una direccion dada. Esta deformación es positiva si el
segmento se alarga, y negativa, si se acorta.
Para medir una variación angular, se considera un ángulo recto MÔN trazado idealmente
en un punto del cuerpo. Tal ángulo debe tener lados muy cortos para suponer que se
mantienen casi rectilineos durante el proceso de deformación (figura 2.3). Si se produce
una distorsión que, permaneciendo fijo el punto O, desplaza M a la posición M’, N a la N’
de modo que:
O
A’
B’
O’
A
B
M
N
N’
M’
/2-
O
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
43
2M O N
(2.6)
se toma como “medida” de la deformación angular a la tangente del ángulo .
Precisamente se llama deformación angular unitaria a:
ta n ( )
(2.7)
o bien, definiendo:
1
2ta n ( )
(2.8)
Evidentemente la deformación angular unitaria es positiva si el ángulo recto MON se
cierra y negativa si se abre.
Otra clasificación importante de las deformaciones es la que las subdivide en “isotrópicas”
(o volumétricas) y “distorsionales”. Se dice que la deformación sufrida por un medio en la
proximidad de cierto punto es isotrópica siempre que sea la misma en todas las
direcciones trazadas por el punto. Esto implica, que entonces, no puede haber
deformaciones angulares, sino solo elongaciones, y todas ellas iguales entre sí. El
resultado de una deformación isotrópica es un cambio de volumen, no de forma: una
esfera sometida a semejante deformación da por resultado una esfera un cubo da por
resultado un cubo. Por el contrario, una deformación distorsional no ocasiona cambios de
volumen, sino solo de forma. Una deformación angular es típicamente distorsional. Una
deformación cualquiera puede siempre suponerse que se obtiene idealmente debido a la
sucesión de una deformación isotrópica y de una distorsional.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
44
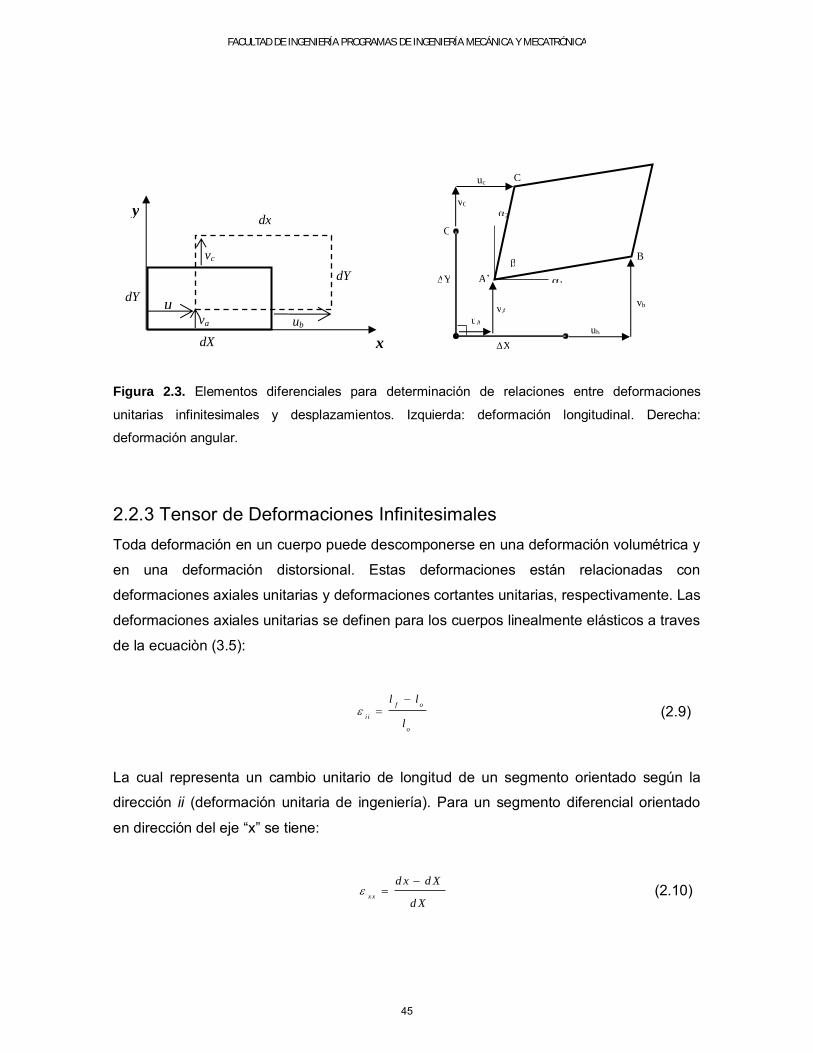
Figura 2.3. Elementos diferenciales para determinación de relaciones entre deformaciones
unitarias infinitesimales y desplazamientos. Izquierda: deformación longitudinal. Derecha:
deformación angular.
2.2.3 Tensor de Deformaciones Infinitesimales
Toda deformación en un cuerpo puede descomponerse en una deformación volumétrica y
en una deformación distorsional. Estas deformaciones están relacionadas con
deformaciones axiales unitarias y deformaciones cortantes unitarias, respectivamente. Las
deformaciones axiales unitarias se definen para los cuerpos linealmente elásticos a traves
de la ecuaciòn (3.5):
f o
i i
o
l l
l
(2.9)
La cual representa un cambio unitario de longitud de un segmento orientado según la
dirección ii (deformación unitaria de ingeniería). Para un segmento diferencial orientado
en dirección del eje “x” se tiene:
x x
d x d X
d X
(2.10)
dX
dx
uub va
vc
dY
dY
x
y
2
C
B
’
A ’
C
’
X
Y
v A u A
ub
vb
v C
uc
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
45
Donde dx y dX representa la longitud final e inicial del segmento. Si consideramos
pequeños desplazamientos y pequeñas deformaciones, podemos expresar la longitud
deformada del segmento en función de la longitud inicial a través de los desplazamientos
que experimentan los puntos que definen el segmento (figura 2.3 izq.):
A bd x d X u u
Reemplazando en (2.10):
A b
x x
d X u u d X u
d X x
(2.11)
Similarmente para segmentos orientados según los ejes “x” y “y” se obtiene:
;
y y z z
v w
y z
(2.12)
Por otra parte, las deformaciones cortantes miden el cambio de ángulo entre dos
segmentos de línea recta que inicialmente (antes de la deformación) era recto (figura 2.3
der.). De esta manera, definimos el ángulo final entre los dos segmentos de línea recta
como:
1 2
2 2x y
(2.13)
Donde xy representa la deformación unitaria a cortante. A partir de la figura, y
considerando ángulos de rotación pequeños (es decir: 1 1 2 2
ta n , ta n ), 1 y 2 se
pueden ser determinados como:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
46
10
l im
c A
Y
X u u u
u u
Y y
(2.14)
Un análisis similar aplica para 2. En este caso se obtiene:
20
lim
B A
X
Y v v v
v v
X x
(2.15)
Reemplazando en (2.13):
x y
u v
y x
(2.16)
Similarmente se pueden realizar análisis para segmentos en los planos x-z y y-z con lo
cual se obtienen expresiones similares:
x z
y z
u w
z x
v w
z y
(2.17)
Las componentes de deformaciòn infinitesimales son escritas en forma tensorial a traves
del tensor de deformaciones infinitesimales de Cauchy:
1 1
2 2
1 1
2 2
1 1
2 2
x x x y x z
x y y y y z
x z y z z z
(2.18)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
47

2.2.4 Deformaciones en coordenadas cilíndricas
En coordenadas cilíndricas, las componentes de deformación están dadas por las
expresiones:
1; ;
1 1 1;
2 2
1 1
2
r r z
r r z z
r z r
r r z
z
z
uu u u
r r r z
u uu u u
r r r z
u u
z r
(2.19)
Las cuales también pueden ser expresadas a traves del tensor de Cauchy.
2.2.5 Deformación axial en una direcciòn cualquiera
La deformación unitaria en un punto P de un segmento infinitesimal de linea recta en
orientado segùn un vector unitario n puede ser determinado a partir del tensor de
deformaciones de Cauchy, mediante la expresion:
T
nn ε n (2.20)
Ejemplo. El cuerpo rectangular mostrado en la figura, se encuentra sometido al campo de
desplazamiento dado por el vector:
2000
mm
X
Y
1000
mm
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
48

1 .6 2 5 ( 2 ) (1 )m m
1 .2 5 ( 2 ) (1 ) 1 .6 5 2
u x y x y
v x y x y
u
Hallar el tensor de Cauchy en el punto P(1, 0.5) y el valor de la deformaciòn en este punto
segùn la direcciòn dada por el vector 0 .8 6 6 0 .5 0 0T
n .
Soluciòn. El tensor de deformaciòn està dado por la expresiòn (3.18). Debido a que el
problema es bidimensional (los desplazamientos solo dependen de x y y) y de
desplazamiento en el plano (solo existen dos componetes de desplazamiento) el tensor se
reduce a:
1
2
1
2
x x x y
y x y y
Con:
1
2
1 .6 2 5 (1 ) ;
1 .2 5 ( 2 ) 1 .6 2 5
12 .2 5 0 .3 1 2 5 1 .4 3 7 5
2
x x
y y
x y
uy y
x
vx x
y
u vx y
y x
Evaluando estas expresiones en en el punto P(1,0.5) se obtiene el tensor en ese punto:
31 .3 1 1 .2 2
1 0 m m /m m1 .2 2 0 .3 7 5
La deformación en P en la dirección 0 .8 6 6 0 .5 0 0T
n está dada por (3.20):
3
1 .3 1 1 .2 2 0 .8 6 60 .8 6 6 0 .5 0 0 1 .9 4 5 2 1 0 m m /m m
1 .2 2 0 .3 7 5 0 .5 0 0
n
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
49
2.3 Definición de esfuerzo
2.3.1 Fuerzas externas e internas
Las fuerzas que pueden actuar sobre un cuerpo pueden ser de dos tipos [2]: fuerzas
màsicas o de cuerpo y fuerzas de superfice. Las primeras son las fuerzas que ejercen a
distancia sobre las particulas del interior de cuerpo. Ejemplo de dichas fuerzas son las
gravitatorias, las inerciales y las de atracciòn magnetica.
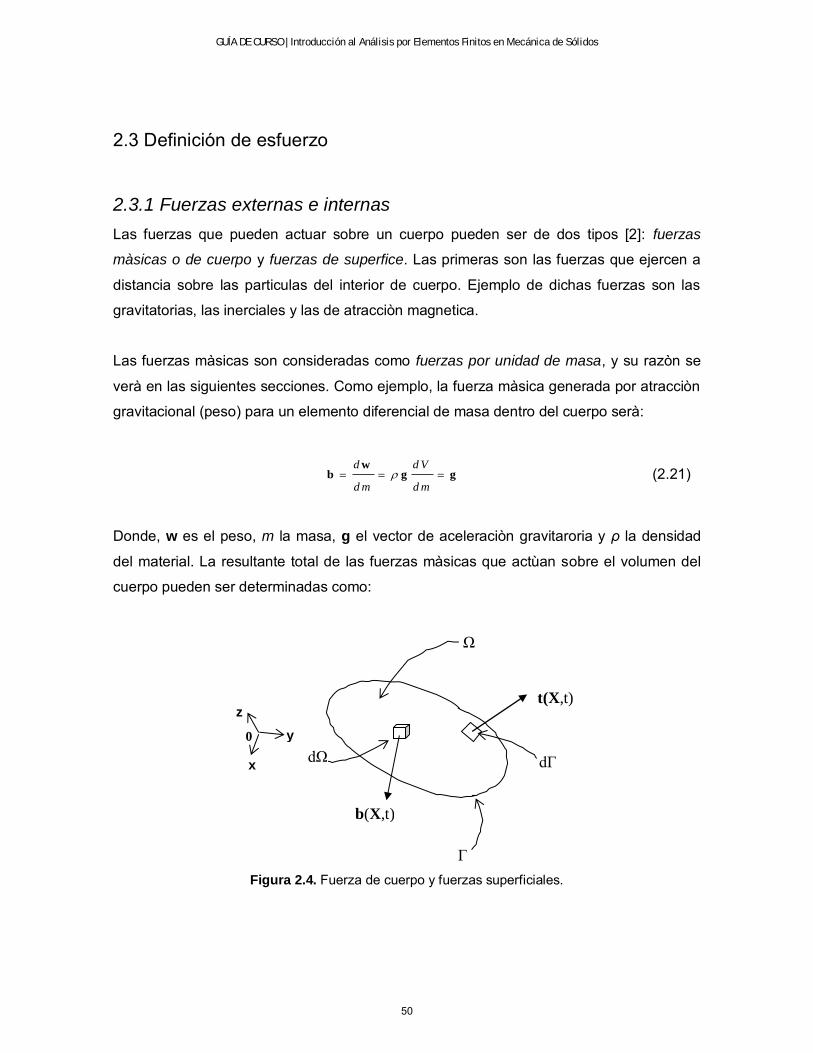
Las fuerzas màsicas son consideradas como fuerzas por unidad de masa, y su razòn se
verà en las siguientes secciones. Como ejemplo, la fuerza màsica generada por atracciòn
gravitacional (peso) para un elemento diferencial de masa dentro del cuerpo serà:
d d V
d m d m
wb g g (2.21)
Donde, w es el peso, m la masa, g el vector de aceleraciòn gravitaroria y ρ la densidad
del material. La resultante total de las fuerzas màsicas que actùan sobre el volumen del
cuerpo pueden ser determinadas como:
Figura 2.4. Fuerza de cuerpo y fuerzas superficiales.
x
y
z
0
t(X,t)
dΓ
Γ
Ω
b(X,t)
dΩ
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
50

( , )
m
d m t d
v
f b b X (2.22)
Donde se ha dejado explicito el hecho de que la fuerza de cuerpo puede variar de un
punto a otro dentro del cuerpo, como en el caso de fuerzas centrifugas.
Por otra parte, las fuerzas superificiales son aquellas que actùan sobre el contorno del
volumen material considerado [1]. Estas fuerzas pueden considerarse producidas por
fuerzas de contacto de las particulas situadas el contorno del cuerpo con el exterior del
mismo. Estas fuerzas son expresadas como fuerzas por unidad de àrea sobre la cual
actùan. Si t es la fuerza de superficie que actùa sobre un elemento diferencial de
superficie dΩ, tal como se presenta en la figura 2.4, entoces la resultante total de las
fuerzas de superficie que actùan sobre el contorno (superficie del cuerpo) està dada por:
( , )
st d
f t X (2.23)
2.3.2 El Tensor de Esfuerzo
El estado de esfuerzo en un punto, tal como se presenta en la figura 2.4, puede ser
representado matemáticamente a través de un tensor de segundo orden, conocido como
tensor de esfuerzo de Cauchy:
x x x y x z
y x y y y z
z x z y z z
σ (2.24)
Estas nueve componentes rectangulares de representan las componentes de tres
vectores de esfuerzos, t1, t2, t3, que actúan en las tres caras perpendiculares sobre las
que actúan, tal como se muestra en la figura 2.5. Estos vectores no necesariamente son
perpendiculares a las caras, y por lo tanto pueden descomponerse en esfuerzos normales
y cortantes en cada una de ellas. Matemáticamente está definido como:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
51
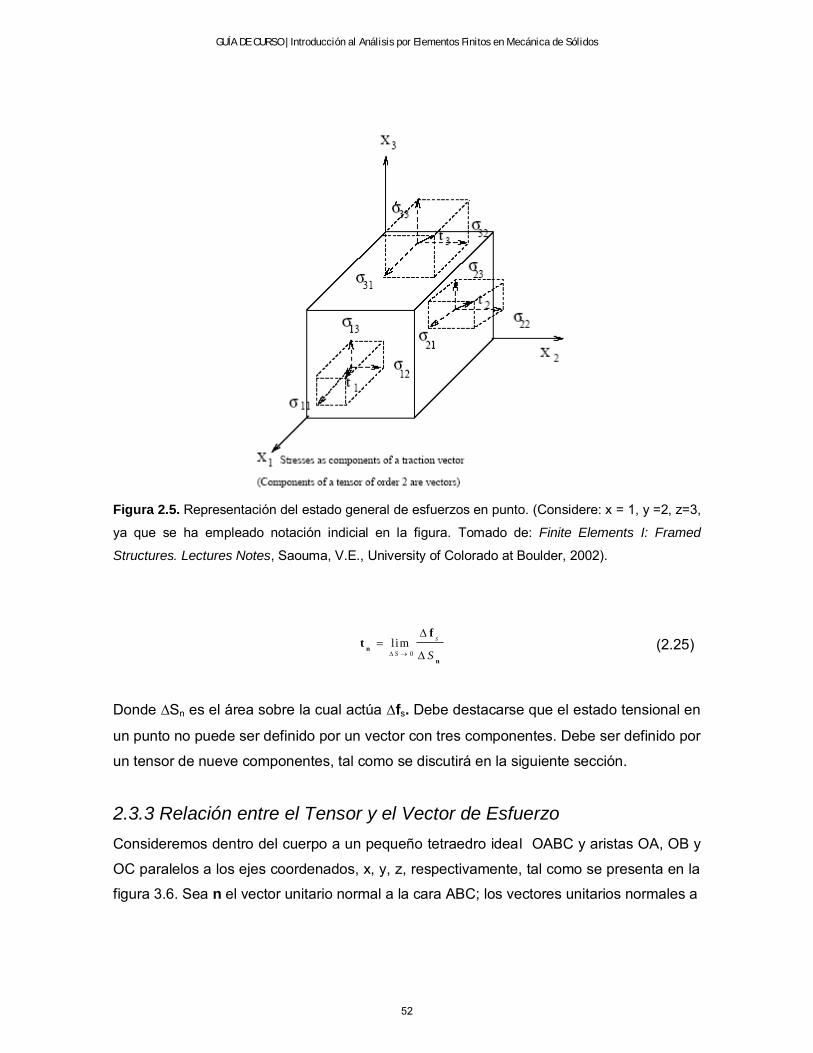
Figura 2.5. Representación del estado general de esfuerzos en punto. (Considere: x = 1, y =2, z=3,
ya que se ha empleado notación indicial en la figura. Tomado de: Finite Elements I: Framed
Structures. Lectures Notes, Saouma, V.E., University of Colorado at Boulder, 2002).
0
lims
S S
n
n
ft (2.25)
Donde Sn es el área sobre la cual actúa fs. Debe destacarse que el estado tensional en
un punto no puede ser definido por un vector con tres componentes. Debe ser definido por
un tensor de nueve componentes, tal como se discutirá en la siguiente sección.
2.3.3 Relación entre el Tensor y el Vector de Esfuerzo
Consideremos dentro del cuerpo a un pequeño tetraedro ideal OABC y aristas OA, OB y
OC paralelos a los ejes coordenados, x, y, z, respectivamente, tal como se presenta en la
figura 3.6. Sea n el vector unitario normal a la cara ABC; los vectores unitarios normales a
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
52
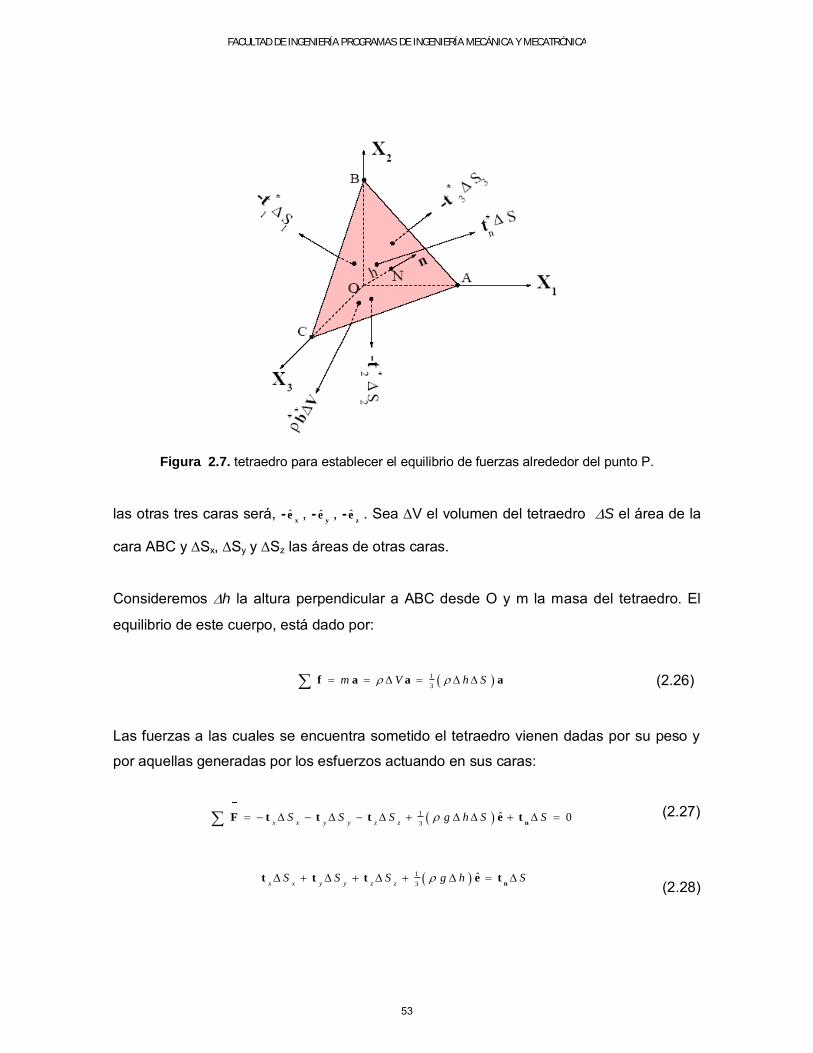
Figura 2.7. tetraedro para establecer el equilibrio de fuerzas alrededor del punto P.
las otras tres caras será, - ˆx
e , - ˆy
e , - ˆz
e . Sea V el volumen del tetraedro S el área de la
cara ABC y Sx, Sy y Sz las áreas de otras caras.
Consideremos h la altura perpendicular a ABC desde O y m la masa del tetraedro. El
equilibrio de este cuerpo, está dado por:
1
3m V h S f a a a (2.26)
Las fuerzas a las cuales se encuentra sometido el tetraedro vienen dadas por su peso y
por aquellas generadas por los esfuerzos actuando en sus caras:
1
3ˆ 0
x x y y z zS S S g h S S n
F t t t e t
1
3ˆ
x x y y z zS S S g h S
nt t t e t
(2.27)
(2.28)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
53

Haciendo que h tienda a cero:
c o s c o s c o sx y z
n
t t t t
ó
ˆ ˆ ˆ ˆ ˆ ˆc o s c o s
ˆ ˆ ˆ ˆ ˆ ˆc o s
x x x y x z x y y y y z
x z y z z z x y zt t t
x y z x y z
x y z x y z
e e e e e e
e e e e e e
(2.29)
(2.30)
Igualando (3.28) y (3.29), y dividiendo todo entre S y observando que los cosenos
directores de n están dados por: c o s , c o s , c o sx y z
S S S S S S , se obtiene:
c o s c o s c o s
c o s c o s c o s
c o s c o s c o s
x x x y x z x
y x y y y z y
x z y z z z z
t
t
t
(2.31)
Expresiones que relacionan las componentes tx, ty, tz del vector de esfuerzo tn en una cara
con orientación n y las componentes de esfuerzo en tres caras mutuamente
perpendiculares. Esto establece el segundo principio de Cauchy: El estado de esfuerzo en
un punto P sobre un plano cualquiera de orientación n queda totalmente definido si se
conocen las componentes de esfuerzos en tres planos mutuamente perpendiculares que
pasan por P. Vectorialmente las ecuaciones (2.31) son escritas como:
c o s
c o s .
c o s
x x x x y x z
y y x y y y z
z z x z y z z
t
t
t
nt σ n (2.32)
Si se corta el tetraedro analizado PABC en la superficie de un sólido con la cara ABC
perteneciendo a esta, entonces tx, ty, tz, representan las componentes de esfuerzo debido
a las cargas externas aplicadas (esfuerzo en la superficie del cuerpo). Las ecuaciones
(2.31) entonces relacionan las fuerzas externas aplicadas y las fuerzas internas
desarrolladas en el cuerpo. Estas ecuaciones son conocidas como condiciones de borde
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
54

naturales de las ecuaciones diferenciales de gobierno para un cuerpo sólido. Como se
verá, en la solución del problema de deformación, estas ecuaciones deben cumplirse en
todos los puntos al interior del cuerpo (dominio) y las ecuaciones (2.30) en todos los
puntos de la superficie del cuerpo (borde), de manera simultánea. Las ecuaciones de
gobierno no tienen ningún significado si no se establecen las ecuaciones (2.30) para un
problema dado, es decir, las cargas aplicadas al cuerpo.
Ejemplo. El estado de esfuerzos en un punto de un cuerpo está dado por el tensor:
0 0 5
0 2 0 M P a
5 0 7
σ
Calcúlese el vector de esfuerzo en la dirección dada por el vector unitario:
0 .9 0 6 0 .2 7 6 0 .3 2 3T n .
Solución.
Empleando la expresión (2.32) podemos hallar el vector de esfuerzos en el punto dado:
0 0 5 0 .9 0 6 1 .6 1 5
0 2 0 0 .2 7 6 0 .5 5 2
5 0 7 0 .3 2 3 2 .2 6 9
x
y
z
t
t M P a
t
nt
Ejemplo. si el estado de esfuerzo en un punto P está dado por el tensor:
7 5 0
5 3 1
0 1 1
M P a
σ
Determine el vector de esfuerzos en P que actúa sobre el plano ABC de la figura 2.6 si
A(4,0,0), B(0,2,0), C(0,0,6).
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
55

Solución. El vector unitario normal al plano ABC puede ser determinado como:
ˆ ˆ ˆ 1 2
* 0 2 6 2 4
4 2 0 8
B C B A
x y ze e e
n
3
* 16
* 72
nn
n
Por lo tanto el vector de esfuerzos es:
3 9
7 7
6 5
7 7
1 02
7 7
7 5 0
5 3 1
0 1 1
x
y
z
t
t M P a
t
2.4 Ecuaciones de Equilibrio Interno
2.4.1 Ecuación de balance de la cantidad de movimiento
Sea un cuerpo sólido sometido a una acción general de cargas tal como se muestra en la
figura 2.1. De este sólido podemos extraer un elemento diferencial de volumen tal como
se muestra. Sobre este volumen actúan fuerzas de cuerpo (gravedad, magnéticas,
eléctricas, inerciales, etc.), y actúan fuerzas de superficie, es decir aquellas transmitidas
por contacto con los elementos másicos que lo rodean. Dichas fuerzas son representadas
por resultantes de esfuerzo sobre cada cara del elemento, por lo que en cada una de ellas
existen tres componentes de esfuerzo: un normal y dos cortantes. Ya que el cuerpo se
encuentra en equilibrio, el elemento diferencial también debe estarlo, por lo que deben
cumplirse las siguientes ecuaciones:
;m I f a r f α (2.33)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
56
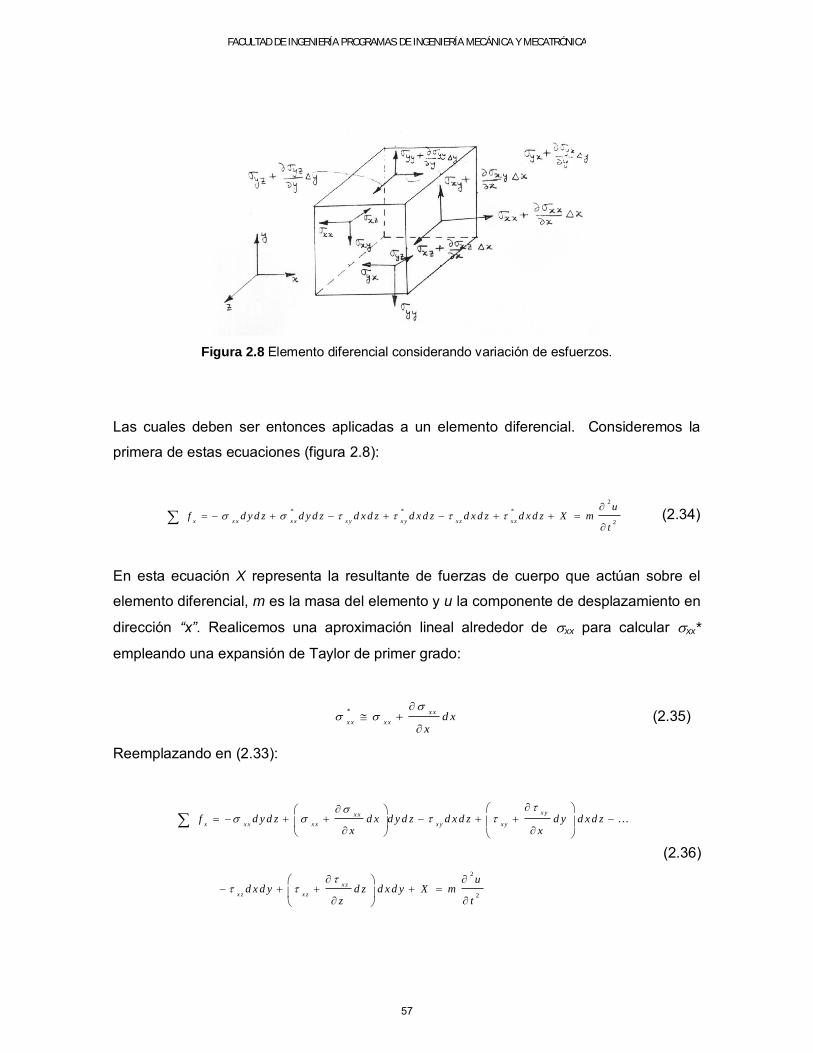
Figura 2.8 Elemento diferencial considerando variación de esfuerzos.
Las cuales deben ser entonces aplicadas a un elemento diferencial. Consideremos la
primera de estas ecuaciones (figura 2.8):
2
* * *
2x x x x x x y x y x z x z
uf d y d z d y d z d x d z d x d z d x d z d x d z X m
t
(2.34)
En esta ecuación X representa la resultante de fuerzas de cuerpo que actúan sobre el
elemento diferencial, m es la masa del elemento y u la componente de desplazamiento en
dirección “x”. Realicemos una aproximación lineal alrededor de xx para calcular xx*
empleando una expansión de Taylor de primer grado:
* x x
x x x xd x
x
(2.35)
Reemplazando en (2.33):
2
2
. . .x yx x
x x x x x x y x y
x z
x z x z
f d y d z d x d y d z d x d z d y d x d zx x
ud x d y d z d x d y X m
z t
(2.36)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
57
Simplificando y definiendo: m d x d y d z y bx como fuerza de cuerpo por unidad de
volumen, se obtiene:
2
2
x yx x x z
x
ub
x y z t
(2.37)
Para las direcciones “y” y “z”, empleando el mismo procedimiento, se obtienen
expresiones similares. Respectivamente:
2
2
y x y y y z
y
vb
x y z t
2
2
z yz x z z
z
wb
x y z t
(2.38)
Este conjunto de ecuaciones puede ser escrito en forma tensorial (sin demostraciòn)
como:
d iv σ b u (2.39)
En coordenadas cilíndricas estas ecuaciones son escritas como:
2
2
2
2
2
2
1
1 2
1 1
r r rr r r z r
r
r z
r
zr z z z z
r z z
ub
r r z r t
ub
r r r r t
ub
r r z r t
(2.40)
La demostración de estas ecuaciones se realiza de forma similar a la presentada. En este
caso debe tomarse un elemento diferencial cilíndrico.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
58

Ejemplo. Un disco circular de espesor uniforme relativamente delgado, gira alrededor de
un eje central normal a sus caras. Establezca las ecuaciones de equilibrio relativas a su
movimiento.
Solución. Tomemos coordenadas cilíndricas, con origen en el centro del disco, y el eje de
rotación como eje z. No habiendo fuerzas externas sobre las caras del disco y siendo
pequeño su espesor es lógico suponer que zz=0. Además, es natural suponer que el
comportamiento de secciones paralelas a las caras del disco ha de ser idéntico y que por
lo tanto no existirán esfuerzos cortantes en estas secciones:
0; 0z r z
Debido a la simetría axial del disco, no puede existir variación de esfuerzos con respecto
a . En cuanto a las fuerzas de cuerpo, si consideramos que el disco gira a una velocidad
angular , se generarán aceleraciones de magnitud:
2
0
r
z
a m r
a r
a
a (2.41)
Por lo tanto las fuerzas de cuerpo serán:
2 2
0 0
r
z
f r r
d mf r r
d Vf
f (2.42)
Finalmente, empleando las ecuaciones (3.39) simplificadas según las consideraciones
realizadas se obtienen las ecuaciones diferenciales de gobierno:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
59

2 10
20
r
r
r
r
rr r
rr r
(2.43)
En este ejemplo se ha introducido los términos inerciales a través de los términos de
fuerzas de cuerpo y no a través de los términos inerciales de (2.40), considerando estos
iguales a cero.
2.4.2 Ecuaciòn de Balance del Momentum Angular
Un análisis similar al realizado en la secciòn 3.4.1 se puede realizar para determinar el
equilibrio interno del momentum angular. A partir de la ecuaciòn:
I r f α (2.44)
Y considerando nuevamente el elemento diferencial de la figura 3.8, determinemos el
balance de momentum para el eje “z”3:
2
2
2
ˆ ˆ ˆ
ˆ ˆ
y x
y x x y x x x y y
x y z
x y y z
d y d x d z d x d z d y d zy
d x d y d z r d x d y d zx t
r e r e r e
r e e
(2.45)
Considerando el momento màsico de inercia despreciable por ser un elemento diferencial
se obtiene:
ˆ ˆ ˆ ˆy x x y x x x y y x y y
d x d z d x d z d y d z d y d z r e r e r e r e 0 (2.46)
3 Se ha considerado que los brazos de giro de las fuerzas cortantes en caras opuestas son iguales, ya que es un
elemento diferencial.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
60
Simplificando se obtiene finalmente:
y x x y
(2.47)
Se obtienen resultados similares considerando ecuaciones para los ejes restantes:
; ;y x x y y z zy zx x z
(2.48)
Esto demuestra que el tensor de esfuerzos es simetrico, ya que los esfuerzos cortantes
en caras adyacentes son numericamente iguales. Por que en un punto existen 6
componentes de esfuerzos como incognitas.
El sistema de ecuaciones (3.36), (3.37), junto con las relaciones encontradas entre los
esfuerzos cortantes, no es un suficiente para resolver el problema de hallar la distribución
de esfuerzos y deformaciones en un sólido ya que, en total, se cuenta con tres
ecuaciones y nueve incógnitas. Por lo tanto se debe buscar seis ecuaciones adicionales
que relacionen esfuerzos y desplazamientos. Estas relaciones en mecánica son
conocidas como relaciones constitutivas, ya que dependen de la respuesta mecánica del
material. En otras palabras, caracterizan la respuesta mecánica de un material bajo la
acción de cargas aplicadas. Existen distintas ecuaciones constitutivas: la ley de hooke
para respuestas elásticas, los criterios de fluencia de Hencky-Von Mises en plasticidad,
los modelos de Maxwell y Voight para modelar comportamiento visco-elástico, etc.
2.5 Ley de Hooke Generalizada
2.5.1 Hipotesis de la Teorìa de la Elasticidad Lineal
Esta teorìa puede considerarse como una simplifaciòn de teorìas màs generales (Teorìa
general de la Elasticidad), pero es suficientemente aproximada para la mayorìa de
aplicaciones en ingenierìa. Las hipotesis simplificativas de la Teorìa de la Elasticidad
Lineal son bàsicamente las siguientes[1]:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
61
a) Las deformaciones son infinitesimales. Esto quiere decir que se consideran los
desplazamientos y sus gradientes pequeños. Esto ultimo quiere decir que las
deformaciones unitarias son pequeñas (mucho menor que la unidad. Para efectos
practicos se consideran valores màximos para estas en el orden de 0.01% para
materiales de ingenierìa).
b) Existencia de un estado neutro: Se admite la existencia de un estado neutro en las
que las deformaciones y tensiones son nulas. Normalmente se considera este
estado como la configuraciòn inicial del cuerpo.
c) Se considera que el proceso de deformacion es isotèrmico y adiabatico. Los
procesos isotèrmicos son aquellos que tienen lugar a temperatura constante a lo
largo del tiempo. Por otra parte, los procesos adiabàticos, son aquellos que se
producen sin generaciòn de calor en todo punto e instante del tiempo. Los
procesos lentos de deformaciòn suelen considerarse adiabàticos.
2.5.2 Relaciones esfuerzo-deformación para Materiales Isotròpicos
Consideraremos en este libro unicamente cuerpos elasticos que siguen la ley de Hooke.
Matematicamente esta ley està dada por las ecuaciones de esfuerzo-deformaciòn,
conocidas como ecuaciones generalizadas de Hooke4:
2
2
2
x x x x x x y y z z x y x y
y y y y x x y y z z x z x z
z z z z x x y y z z y z y z
G G
G G
G G
(2.49)
Con las constantes G y (constantes de Lamé) definidas como:
4 Para mayor detalle sobre la deducción de estas ecuaciones, consulte libro sobre teoría de la elasticidad o
mecánica de materiales.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
62
2;
1 2 2 1
G v EG
v v
(2.50)
En coordenadas cilíndricas, la Ley de Hooke se expresa como:
(1 ) ( )
r r r r z zv v
v
(1 ) ( )
(1 ) ( )
; ; ;
r r z z
z z z z r r
r r r z r z z z
v vv
v vv
G G G
(2.51)
2.5.3 Relaciones esfuerzo-deformación para Materiales Ortotròpicos
Ciertos materiales naturales como los cristales de topacio y barita, son ortotrópicos. La
madera también puede considerarse como ortotrópica en una primera aproximación. Los
compuestos unidireccionales reforzados con fibra también exhiben comportamiento
ortotrópico. Los materiales ortotrópicos tienen tres planos mutuamente perpendiculares de
simetría elástica. Denotemos con 1, 2 y 3 los ejes principales del material que son
normales a los planos de simetría. Por ejemplo, la figura 2.3 muestra una sección
transversal de un árbol, en el que 1 es el eje a lo largo de las fibras de la madera, 2 es el
eje tangencial a los anillos anulares y 3 es el eje a lo largo de la dirección radial. La ley de
Hooke generalizada para este caso, y referida al sistema coordenado 1, 2 y 3 puede
escribirse como:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
63
1 31 2
1 1 2 3 2 3 2 3
1 2 3 2 3
3 21 2
2 1 2 3 1 3 1 3
1 2 3 1 3
1 3 2 3
2 1 2 3 1 2 1 2
1 2 3 1 2
1 1,
1 1,
1 1,
E E E G
E E E G
E E E G
(2.52)
donde E1, E2 y E3 son los módulos de Hooke a lo largo de los ejes principales del material;
12 es la razón de Poisson que caracteriza el decremento en la dimensión 2 al aplicar una
tensión en la dirección 1; 21 es la razón de Poisson que caracteriza el decremento en la
dirección 1 debido a una tensión aplicada en la dirección 2, etc., G23, G13, G12 son los
módulos cortantes que caracterizan los cambios en los ángulos entre las direcciones
principales 2 y 3, 3 y 1 y 1 y 2, respectivamente. Debido a la simetría de las ecuaciones se
tienen las siguientes relaciones:
E121 = E212 , E232 = E323 , E313 = E131
(2.53)
2.6 Termoelasticidad
2.6.1 Tensiones y deformaciones térmicas
La variación de temperatura en un material puede ser causa de esfuerzos internos, ya que
la dilatación resultante no puede desarrollarse rápida y completamente, ya sea por escasa
conductividad del material, o por hallarse el cuerpo confinado o restringido de movimiento.
En muchos diseños de elementos de maquinas o estructuras sujetas a fuertes variaciones
de temperatura, es imprescindible tener en cuenta los esfuerzos térmicos de origen
elástico. Dichos esfuerzos se presentan básicamente por la restricción de la deformación
unitaria por deformación, causada por las condiciones mencionadas. Para incluir este
efecto en las ecuaciones constitutivas de elasticidad lineal, puede partirse de la expresión
general de deformación térmica:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
64

00 0 0 ( )
x x
TT
y y x y z
z z
T T T
ε α α (2.54)
Donde es el coeficiente térmico de expansión en las direcciones x, y, z y T0 es la
temperatura de referencia. Un aumento en la temperatura en el cuerpo, a partir de la
temperatura de referencia genera una expansión volumétrica en un elemento diferencial
tomado al interior del cuerpo.
Ec’s. cinemáticas Ley de Hooke Ecuaciones de equilibrio
x x
u
x
,y y z z
v w
y z
x y
u v
y x
x z
y z
u w
z x
v w
z y
2(1 2 )
2(1 2 )
2(1 2 )
x
x x x x x x y y z z
y
y y y y x x y y z z
z
z z z z x x y y z z
EG T
v
EG T
v
EG T
v
2
2
x yx x x z
x
ub
x y z t
2
2
y x y y y z
y
vb
x y z t
2
2
z yz x z z
z
wb
x y z t
Tabla 2.1 Sistema general de ecuaciones en coordenadas rectangulares. (No se incluyen
componentes tèrmicas)
Esta expansión puede encontrarse restringida en el caso de que el cuerpo no pueda
expandirse libremente, tal como se explicó arriba. Por lo tanto esta restricción causa
esfuerzos normales de compresión sobre las caras del elemento (esfuerzos volumétricos),
impidiendo su libre expansión. Por lo tanto estos esfuerzos pueden considerarse como
aquellos esfuerzos que generan una expansión igual y contraria a la dada por la
expresión:
(1 2 )
T x
x x
ET
v
(2.55)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
65

2.6.2 Ecuación constitutiva termoelástica lineal
Para tener en cuenta efectos termoelásticos, las ecuaciones (2.47) son modificadas como:
2(1 2 )
2(1 2 )
2(1 2 )
x
x x x x x x y y z z
y
y y y y x x y y z z
z
z z z z x x y y z z
EG T
v
EG T
v
EG T
v
(2.56)
Conocida como ecuación general de la termolasticidad lineal.
2.7 Planteamiento General del Problema Elàstico
En este punto, podemos establecer de forma completa una formulación matemática
general de problemas que necesitan ser resueltos, buscando obtener una descripción
completa de la deformación en un cuerpo lineal elástico. Suponga que un cuerpo
inicialmente ocupa un dominio 3 y que el cuerpo tiene una frontera , la cual es
conformada por dos partes que no se traslapan u y t con: = u + t . Suponemos que
la fuerza másica f(X,t) está dada en , que el desplazamiento u*(X,t) esté definido en la
parte u y la fuerza de tracción en la superficie s*(X,t) está especificado en t para todo t
[0,t].
Los valores iniciales de desplazamiento y de velocidad están dados por u(X,0) = u0(X) y
0( , 0 ) ( )u X u X . Entonces, el problema con valor inicial y valor en la frontera para un
problema de elasticidad lineal es el siguiente: encontrar el campo de desplazamiento
u(X,t) que satisfaga, en y para todo t [0,t]:
La ecuación de movimiento:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
66
d iv σ b u (2.57)
Las relaciones cinemáticas:
x x
u
x
; z z
w
z
; ;y y
v
y
;
x y
u v
y x
; x z
u w
z x
;
y z
v w
z y
(2.58)
La ecuaciónes constitutivas termoelástica lineal:
2(1 2 )
2(1 2 )
2(1 2 )
; ; ;
x
x x x x x x y y z z
y
y y y y x x y y z z
z
z z z z x x y y z z
x y x y y z y z x z z x
EG T
v
EG T
v
EG T
v
G G G
(2.59)
Las condiciones de borde:
u(X, t) = u*(X, t) en u y t(X, t) = t*(X, t) en t (2.60)
y las condiciones iniciales:
u(X,0) = u0(X) y 0
( , 0 ) ( ) u X u X X (2.61)
La tabla 2.1 presenta el sistema completo de ecuaciones que nos permite solucionar el
problema en elasticidad: determinar desplazamientos, esfuerzos y deformaciones
unitarias desarrolladas en un cuerpo sólido. El sistema presenta 15 ecuaciones con 15
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
67
incógnitas. Este sistema puede ser simplificado si se toman las ecuaciones cinemáticas y
se reemplazan en las ecuaciones constitutivas. De esta manera obtenemos un sistema de
9 x 9. Si ahora reemplazamos estas ecuaciones constitutivas en las ecuaciones de
equilibrio y luego de cierta manipulación matemática obtenemos un sistema de
ecuaciones en los desplazamientos. Estas ecuaciones son conocidas como ecuaciones
de Navier:
2
2
2( )G G
t
uu u b (2.62)
Las cuales deben ser resueltas sometidas a las condiciones de frontera y condiciones
iniciales dadas en (3.59) y (3.60). Entonces el problema en elasticidad lineal consiste en
hallar el campo de desplazamientos, ya que a partir de esta podemos calcular las
deformaciones unitarias y los esfuerzos desarrollados.
En general el sistema de ecuaciones de Navier no tienen soluciones analíticas salvo al
analizar geometrías y condiciones de frontera e iniciales sencillas, las cuales se presentan
en problemas mas de corte académico que practico. Es por que se emplean métodos
numéricos para obtener soluciones aproximadas en problemas de ingeniería donde, en
general, las geometrías y cargas aplicadas son complejas.
A continuaciòn se desarrollan las ecuaciones de gobierno que rigen el comportamiento
mecànico de deformaciòn de elementos estructurales sencillos: barras con carga axial,
vigas, ejes sometidos a torsiòn y membrana. Dichos desarrollos se realizaràn a partir de
los conceptos expuestos en el capitulo y seràn de utilidad para conocer el comportamiento
de dichos elementos con miras a entender su modelamiento por elementos finitos.
2.8 Elementos Estructurales
2.8.1Barra con Carga Axial
Experimentalmente se demuestra que el campo de desplazamiento en la barra es
unidireccional por lo que las componentes de desplazamiento v y w son iguales a cero.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
68
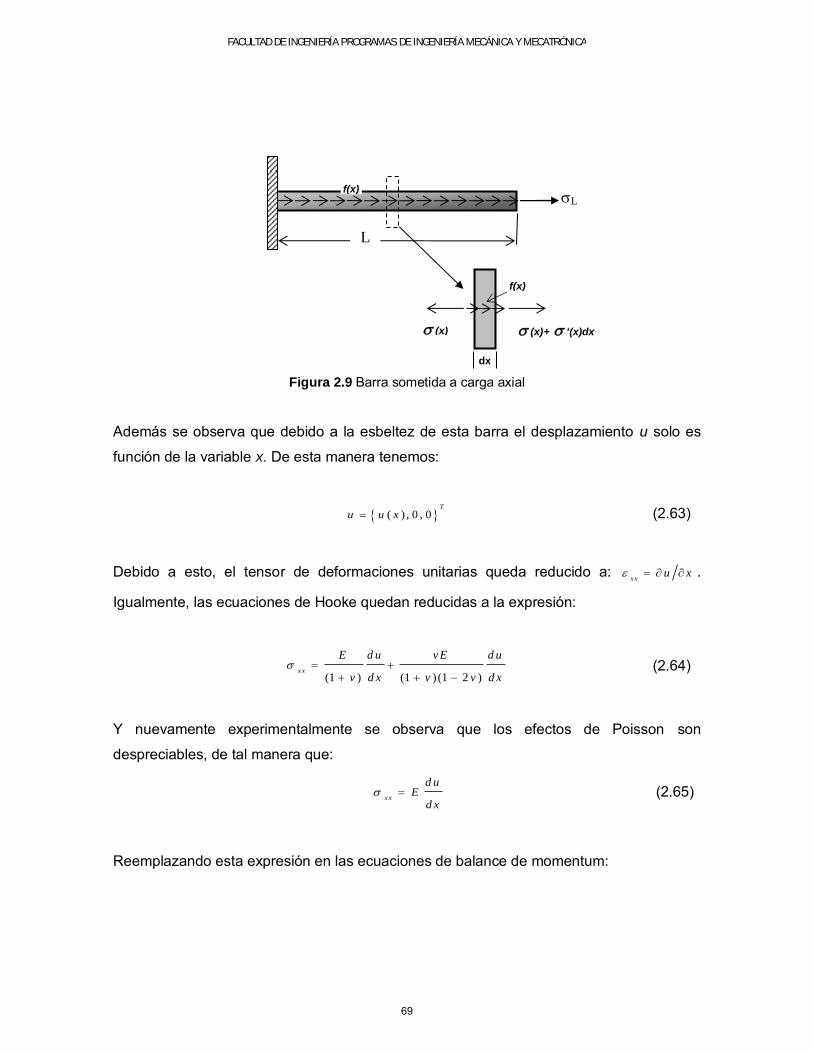
Figura 2.9 Barra sometida a carga axial
Además se observa que debido a la esbeltez de esta barra el desplazamiento u solo es
función de la variable x. De esta manera tenemos:
( ) , 0 , 0T
u u x (2.63)
Debido a esto, el tensor de deformaciones unitarias queda reducido a: x x
u x .
Igualmente, las ecuaciones de Hooke quedan reducidas a la expresión:
(1 ) (1 )(1 2 )x x
E d u v E d u
v d x v v d x
(2.64)
Y nuevamente experimentalmente se observa que los efectos de Poisson son
despreciables, de tal manera que:
x x
d uE
d x (2.65)
Reemplazando esta expresión en las ecuaciones de balance de momentum:
f(x)
dx
(x)
f(x)
L
L
(x)+ ‘(x)dx
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
69

2
2x
d d u d uE A f A
d x d x d t
(2.66)
fx ha sido expresada como una fuerza volumétrica equivalente. Las condiciones de
frontera e iniciales son:
0 , 0 ,
( ) 0 , 0
L
d uu x E x L
d x
u x t
(2.67)
En este caso fx representa una fuerza por unidad de longitud debido a la dimensionalidad
del sistema. Esta ecuación representa una ecuación de segundo orden con valores en la
frontera y condiciones iniciales que describe el comportamiento de una barra sometida a
cargas axiales. Cualquier barra que cumpla con las hipótesis establecidas anteriormente
puede ser modelada matemáticamente a través de esta ecuación. Es del tipo hiperbólico y
físicamente permite modelar la propagación de ondas en la barra si las condiciones de
carga son dinámicas. Pero simplifiquemos aún más el problema y despreciemos cualquier
efecto inercial sobre la barra. De esta forma tenemos:
0
x
d d uE A f
d x d x
(2.68)
Integrando obtenemos:
1
2 2
1 2( )
2
x
x
d uE A f x c
d x
f xE A u x x c x c
(2.69)
Aplicando las condiciones de fronteras podemos obtener el campo de desplazamiento:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
70

2( )
( )2
x L xf x A f L
u x xE A E A
(2.70)
Como caso particular, si evaluamos esta expresión en x=L obtenemos lo que resistencia
de materiales denominamos elongación (para fx=0):
( )
LL P L
u LE E A
(2.71)
2.8.2 Viga de Euler-Bernoulli
Las hipótesis de Euler-Bernoulli para el campo de desplazamiento en vigas prismáticas
son:
1. Las secciones perpendiculares al eje neutro permanecen perpendiculares en el estado
deformado de la viga.
2. Las secciones transversales planas permanecen planas.
3. La sección transversal es simétrica con respecto al plano de aplicación de carga.
4. el desplazamiento solo tiene componentes en dirección “y” y solo depende de “x”.
En la teoría de vigas de Euler-Bernoulli, se asume que las secciones planas permanecen
planas y perpendiculares al eje neutro de la viga, lo cual es expresado por la ecuación:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
71
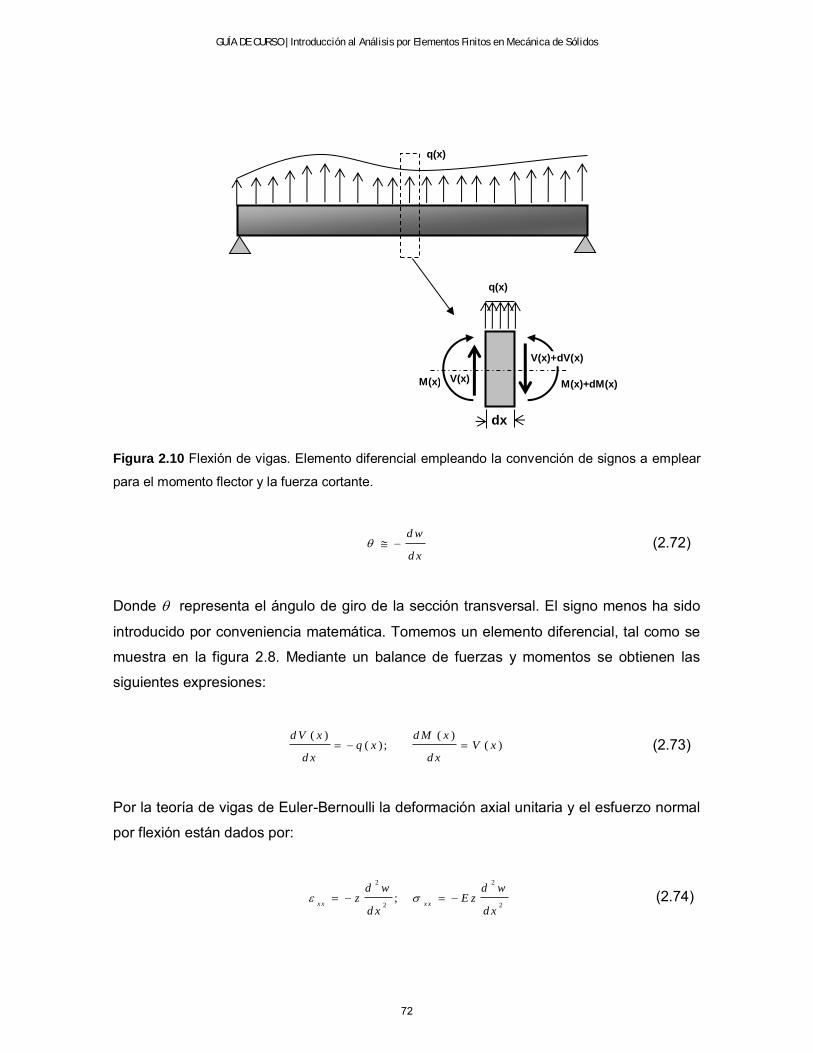
Figura 2.10 Flexión de vigas. Elemento diferencial empleando la convención de signos a emplear
para el momento flector y la fuerza cortante.
d w
d x (2.72)
Donde representa el ángulo de giro de la sección transversal. El signo menos ha sido
introducido por conveniencia matemática. Tomemos un elemento diferencial, tal como se
muestra en la figura 2.8. Mediante un balance de fuerzas y momentos se obtienen las
siguientes expresiones:
( ) ( )( ) ; ( )
d V x d M xq x V x
d x d x (2.73)
Por la teoría de vigas de Euler-Bernoulli la deformación axial unitaria y el esfuerzo normal
por flexión están dados por:
2 2
2 2;
x x x x
d w d wz E z
d x d x (2.74)
dx
q(x)
M(x)+dM(x) M(x)
V(x)
V(x)+dV(x)
q(x)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
72

Las cuales se obtienen al considerar la ecuación (2.71). El momento flector resultante que
actúa en la sección transversal es igual a:
2 2
2 2( )
x x
A A
d w d wM x y d A E z d A E I
d x d x (2.75)
Reemplazando en la ecuación (3.72) se obtiene:
3
3( )
d wE I V x
d x (2.76)
Derivando nuevamente puede obtenerse una relación entre la deflexión y la carga
distribuida, la cual representa la ecuación de gobierno del problema de deflexión en vigas
bajo la teoría de Euler-Bernoulli:
4 2 2 2
4 2 2 2
( )( ) ( ) ( )
d w x d w d d wE x I x q x A J
d x d t d x d x
(2.77)
Con las condiciones de borde e iniciales:
*
* *
0 0
*
0
3 2
3 2
( , ) [ 0 , ]
( , 0 ) ( ) ( , 0 ) ( )
( , 0 ) ( )
( , ) * ; ( , ) * ; [ 0 , ]
uw x t w x t t
w x w x w x w x x
w x w x x
d w d wx t V x t M x t t
d x d x
(2.78)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
73
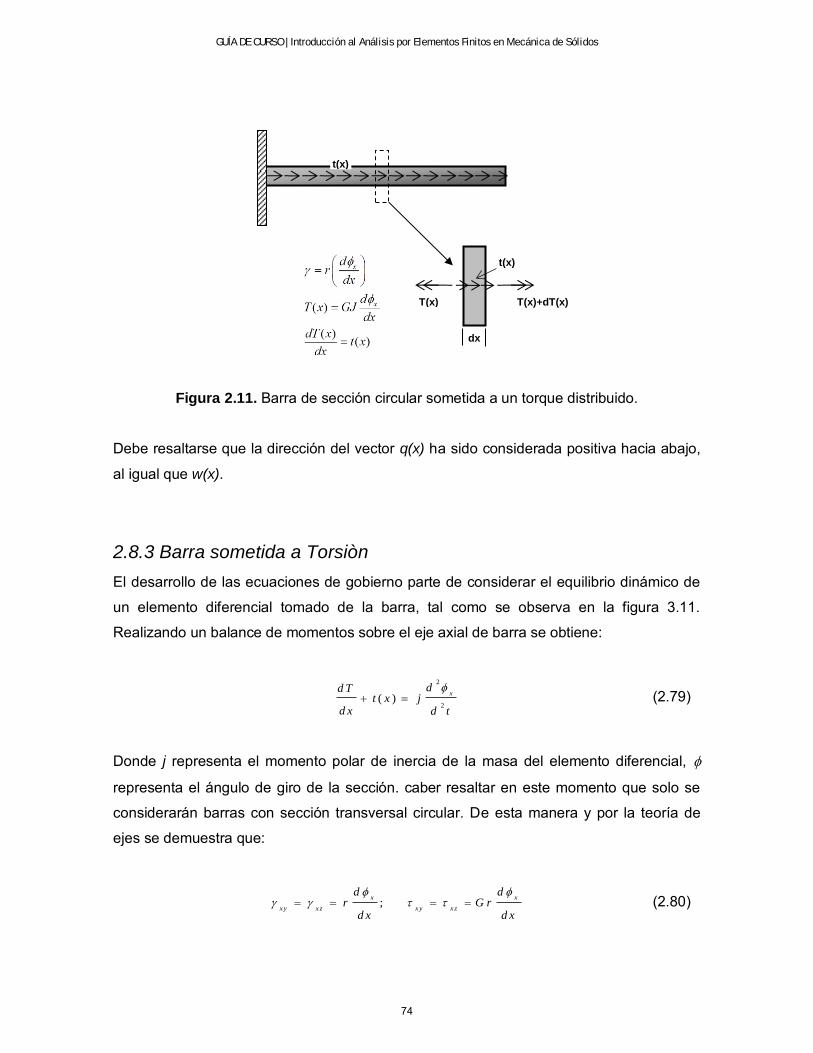
Figura 2.11. Barra de sección circular sometida a un torque distribuido.
Debe resaltarse que la dirección del vector q(x) ha sido considerada positiva hacia abajo,
al igual que w(x).
2.8.3 Barra sometida a Torsiòn
El desarrollo de las ecuaciones de gobierno parte de considerar el equilibrio dinámico de
un elemento diferencial tomado de la barra, tal como se observa en la figura 3.11.
Realizando un balance de momentos sobre el eje axial de barra se obtiene:
2
2( )
xdd T
t x jd x d t
(2.79)
Donde j representa el momento polar de inercia de la masa del elemento diferencial,
representa el ángulo de giro de la sección. caber resaltar en este momento que solo se
considerarán barras con sección transversal circular. De esta manera y por la teoría de
ejes se demuestra que:
;
x x
x y x z x y x z
d dr G r
d x d x
(2.80)
t(x)
dx
T(x)+dT(x) T(x)
t(x)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
74

Donde G representa el modulo de rigidez del material y r un radio cualquiera medido
desde el centro del área circular. La resultante de momento torsional sobre el área
transversal es igual a:
( )
x y
A
T x r d A (2.81)
Reemplazando (3.79) en esta ecuación se obtiene una expresión e función del ángulo de
torsión:
2 2
( )
( )
x x
A A
x
d dT x G r d A G r d A
d x d x
dT x G J
d x
(2.82)
Reemplazando esta última en la ecuación (3.78) se obtiene la ecuación de gobierno:
2 2
2 2( ) ( ) ( ) ( )
x xd d
G x J x t x j xd x d t
(2.83)
Con las condiciones de contorno e iniciales:
*
* *
0 0
*
0
( , ) [ 0 , ] ( , ) * [ 0 , ]
( , 0 ) ( ) ( , 0 ) ( )
( , 0 ) ( )
ux t x t t T x t T x t t
x x x x x
x x x
(2.84)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
75

2.8.4 Membrana con Carga Distribuida
Considere la membrana simplemente apoyada en los bordes mostrada en la figura. las
siguientes son las hipótesis consideradas para el campo de desplazamiento: (en un
sistema de coordenadas cilindricas):
1. Si el espesor de la membrana es pequeño, entonces u no es una función dependiente
de z.
2. Por simetría de carga entonces u tampoco es una función dependiente de .
3. Por la dirección de aplicación de la carga puede considerarse: 0u .
4. Por ultimo, el desplazamiento en dirección radial es despreciable en comparación con
el desplazamiento en dirección z, es decir: z
u u
.
Las anteriores consideraciones producen un problema unidimensional, con el siguiente
campo de desplazamiento:
, , 0
, , 0
, ,
r
z z
u r z
u r z
u r z u r
u (2.85)
Ahora, las deformaciones unitarias están dadas por las expresiones:
1; ;
1;
1
r r z
r r z z
r z r
r r z
z
z
uu u u
r r r z
u uu u u
r r r z
u u
z r
(2.86)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
76
Vemos que por las hipótesis consideradas estas se reducen a considerar solamente:
z
r z
u
r
(2.87)
La ley de Hooke esta dada por:
2 (1 )
z
r z r z
uEG
v r
(2.88)
De manera similar las ecuaciones de momentum lineal se reducen a una expresión
simple:
10
r z
r z zf
r r
(2.89)
Esta ecuación nos indica que la carga de presión (modelada como una fuerza de cuerpo a
través de fz es equilibrada en un elemento diferencial por fuerzas cortantes. Introduciendo
(3.87) se obtiene:
2
2
1 2 (1 )z z
z
u u vf
r r r E
(2.90)
La presión puede ser modelada a través de fz mediante:
z
p A pf
V t (2.91)
Finalmente se obtiene la ecuación diferencial de gobierno para el problema planteado:
2
2
1 2 (1 )z z
u u v p
r r r E t
(2.92)
De forma simplificada:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
77
2
z
pu
G t (2.93)
Las condiciones de borde para esta ecuación son:
0
( ) 0 ; 0z
z
r
d uu R
d r
(2.94)
La solución de (3.91) es:
2
1 2( ) lo g ( )
2z
pu r r C r C
G t (2.95)
Aplicando las condiciones de borde obtenemos:
2
1 20 ;
2
p RC C
G t (2.96)
Reemplazando en (3.94):
2
2( )
2 2z
p p Ru r r
G t G t (2.97)
Finalmente el desplazamiento en el centro de la membrana es:
2
( 0 )2
z
p Ru
G t (2.98)
2.9 “Vectores” de Tensión y de Deformación
En la implementación computacional del método de los elementos finitos suelen
expresarse los tensores de esfuerzo y deformación a través de “vectores” de tensión y de
deformación. Estos se construyen ordenando de forma sistemática los elementos del
triangulo superior de cada una de estos tensores. De esta manera se obtiene una
escritura económica y muy manejable desde un punto de vista computacional. El vector
de deformación unitaria es:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
78
0 0
0 0
0 0
2 0
2 0
2 0
xx x
yy y
z z z
x y y x
x zz x
y zz y
u
v
w
ε Su
(2.99)
Donde se ha empleado una matriz operadora S que actúa sobre el vector de
desplazamiento. De manera similar a las deformaciones unitarias, el vector de esfuerzos
es:
T
x x y y z z x y x z y z σ (2.100)
La Ley de Hooke expresada a través de los anteriores vectores es, para materiales
isotròpicos:
1 0 0 0(1 ) (1 )
1 0 0 0(1 )
1 0 0 0
(1 )(1 2 )
0 01 (1 2 )2 1
(1 2 )0
2 1
(1 2 )
2 1
v v
v v
v
v
E vv
v vv
vs im e tr ic a
v
v
v
σ D ε
(2.101)
Y para materiales ortotrópicos:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
79

1 31 2
1 2
3 2
2 3
3
1 2
2 3
3
1
3
1
1
1
1
1
1
1
0 0 0
0 0 0
0 0 0
0 0
0
E E E
E E
E
G
G
G
s im e tr ic a
ε D σ
(2.102)
Si se tienen en cuenta efectos termoelàsticos, la ecuación (3.100) es modificada como:
(1 2 )o
ET
v
σ D ε ε α (2.103)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
80
Capitulo 3.
Método de los Elementos Finitos
3.1 Introducción
El capitulo presenta la formulación por elementos finitos de las ecuaciones de Navier
dadas en el capitulo anterior. Dicha formulación es general y posteriormente será aplicada
al análisis de problemas en elasticidad lineal. La formulación presentada se basa en la
desarrollada por Zienkiewicz et al., y emplea notación matricial, la cual la hace compacta y
claramente aplicable a diversos tipos de problemas. Este capitulo inicia con el principio de
los trabajos virtuales, como formulación débil de las ecuaciones de equilibrio, a partir del
cual la formulación por elementos finitos de problemas en mecánica de sólidos es
desarrollada. Inicialmente se trata el método de aproximación de Rayleigh-Ritz, cuya
especialización genera el método de los elementos finitos a partir de la división del
dominio de análisis en subdominios conocidos como elementos finitos. Finalmente, es
presentada la metodología de aplicación del método de los elementos finitos a través de
la solución de un problema unidimensional en elasticidad lineal.
La solución de las ecuaciones diferenciales de gobierno de problemas prácticos en
ingeniería es en general imposibles de obtener por métodos analíticos. La dificultad se
presenta, principalmente, en la geometría de los cuerpos, siendo en general compleja. Es
por tanto, que la solución a dichas ecuaciones es abordada mediante métodos numéricos,
que permiten obtener soluciones aproximadas a dichas soluciones.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
81
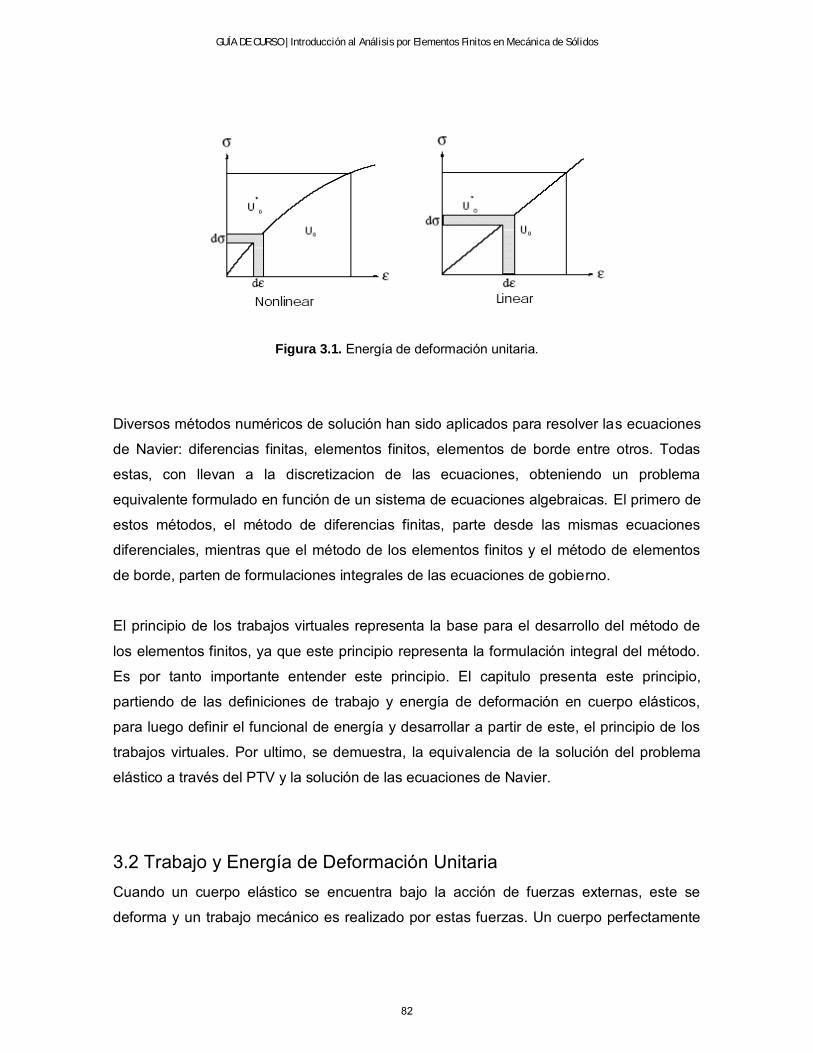
Figura 3.1. Energía de deformación unitaria.
Diversos métodos numéricos de solución han sido aplicados para resolver las ecuaciones
de Navier: diferencias finitas, elementos finitos, elementos de borde entre otros. Todas
estas, con llevan a la discretizacion de las ecuaciones, obteniendo un problema
equivalente formulado en función de un sistema de ecuaciones algebraicas. El primero de
estos métodos, el método de diferencias finitas, parte desde las mismas ecuaciones
diferenciales, mientras que el método de los elementos finitos y el método de elementos
de borde, parten de formulaciones integrales de las ecuaciones de gobierno.
El principio de los trabajos virtuales representa la base para el desarrollo del método de
los elementos finitos, ya que este principio representa la formulación integral del método.
Es por tanto importante entender este principio. El capitulo presenta este principio,
partiendo de las definiciones de trabajo y energía de deformación en cuerpo elásticos,
para luego definir el funcional de energía y desarrollar a partir de este, el principio de los
trabajos virtuales. Por ultimo, se demuestra, la equivalencia de la solución del problema
elástico a través del PTV y la solución de las ecuaciones de Navier.
3.2 Trabajo y Energía de Deformación Unitaria
Cuando un cuerpo elástico se encuentra bajo la acción de fuerzas externas, este se
deforma y un trabajo mecánico es realizado por estas fuerzas. Un cuerpo perfectamente
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
82
elástico puede ser deformado bajo la acción de estas fuerzas. Luego si estas son
retiradas lentamente, el cuerpo gradualmente retornará a su condición inicial no
deformada. Esto quiere decir que el trabajo desarrollado por las fuerzas externas sobre el
cuerpo se almacena como energía interna de deformación la cual le permite retornar al
estado inicial. Desde un punto de vista termodinámico, la relación existente entre este
trabajo y la energía interna del cuerpo se encuentra dado por la primera ley de la
termodinámica:
e
dK U W H
d t (3.1)
Donde K representa la energía cinética, U la energía interna por deformación, We es el
trabajo externo realizado por las fuerzas aplicadas y H el calor suministrado al sistema. Si
consideramos procesos isotérmicos y adiabáticos y bajo una aplicación lenta del sistema
de fuerzas se tiene entonces:
e
U W (3.2)
Es decir, todo el trabajo externo realizado por las fuerzas es convertido en energía interna
de deformación.
El cálculo de U se realiza a partir del concepto de energía de deformación unitaria, la cual
parte de considerar el trabajo realizado por las fuerzas internas que actúan sobre un
elemento diferencial de un material cualquiera que responde cierta ley constitutiva, tal
como la Ley de Hooke en elasticidad lineal (figura 3.1).
En el estado deformado, el cálculo de la energía de deformación unitaria parte de
considerar el trabajo neto realizado por las fuerzas internas sobre un elemento diferencial.
Para simplicidad en la demostración, consideremos la contribución a la energía total de
los esfuerzos normales en dirección x5:
5 En este caso: 0
x x
x
, ya que no existen esfuerzos cortantes en esta dirección.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
83

x
x x x x x x x
u ud U F d s d u d x d y d z d u d y d z d d x d y d z
x x (3.3)
Donde:
x x
ud x
d uu uxd d x d x d x d d x d d x
x x x x
(3.4)
Entonces:
x
x x x xd U d d x d y d z (3.5)
De manera similar el aporte de los restantes esfuerzos sobre el elemento diferencial se
expresa mediante expresiones similares. Deforma general para un elemento diferencial
sometido a un estado general de esfuerzo se tiene:
( )d U d d σ ε ε (3.6)
La energía por deformación almacenada en el cuerpo es igual a:
*
0
( )U d d u d
σ ε ε (3.7)
A la expresión:
*
0
( )u d
σ ε ε (3.8)
Se le denomina densidad de energía por deformación, ya que representa energía elástica
almacenada por unidad de volumen. La energía de deformación total en todo el cuerpo
está dada por:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
84
*U u d
(3.9)
3.3 Energía de Deformación Elástica
Para el caso de sólidos elásticos, la relación entre esfuerzos y deformaciones viene dada
por:
0
( )0
σ D ε ε σ (3.10)
Sustituyendo esta expresión en (4.8) se obtiene:
*
0 0 0
0 0 0 0
( )T T T T
u d d d d
0D ε ε σ ε Dε ε Dε ε σ ε (3.11)
Resolviendo:
* 1
0 02
T T Tu ε Dε ε Dε ε σ (3.12)
Reemplazando esta expresión en (4.9) se obtiene la energía de deformación elástica:
1
0 02
T T TU d d d
ε Dε ε Dε ε σ (3.13)
3.3.1 Energía de deformación de una barra
Las barras sometidas a carga axial, desarrollan una deformación unitaria y un esfuerzo
normal dados por las expresiones:
;
x x x x
d u d uE
d x d x (3.14)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
85

Siendo estas las únicas componentes en los vectores de esfuerzo y deformación. Por
consiguiente, la energía elástica para una barra prismática de sección transversal A y
longitud l, sin tener en cuenta deformaciones y esfuerzos iniciales es:
2
2
E A
l
d uU d x
d x (3.15)
3.3.2. Energía de deformación de una viga
Las deformaciones y esfuerzo por flexión para una viga de Euler son:
2 2
2 2;
x x x x
d v d vy E y
d x d x (3.16)
La energía elástica es entonces:
2 22 2
2
2 22 2
E E I
l l l
d v d vU y d A d x d x
d x d x (3.17)
Donde I es el momento de inercia de la sección transversal con respecto su eje neutro.
3.3.3. Energía de Deformación de un eje
Las deformaciones y esfuerzo por torsión en un eje están dados por:
;
x y x y
d dG
d x d x
(3.18)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
86
2 2
2
2 2
G G J
l l l
d dU d A d x d x
d x d x
(3.19)
3.4 Principio de los Trabajos Virtuales
La formulación anteriormente presentada en las ecuaciones de Navier y conocida como
formulación fuerte en elasticidad lineal, conlleva en general a ecuaciones cuya solución
analítica no puede ser determinada en situaciones verdaderamente prácticas en
ingeniería.
Una formulación alterna (formulación “débil”) se obtiene a través del principio de los
trabajos virtuales, el cual establece que en el estado de equilibrio, el trabajo realizado por
las fuerzas externas e internas que actúan el cuerpo es igual a cero cuando se le impone
un campo “virtual” de desplazamiento, acorde a las restricciones en los desplazamientos
en el cuerpo. Matemáticamente, este principio puede ser escrito como sigue:
El equilibrio del cuerpo implica la igualdad entre la resultante de fuerzas internas y
externas actuantes:
e x t in t
f f (3.20)
Multiplicando ambos miembros por un campo de desplazamiento virtual u (cualquier
campo de desplazamiento cinematicamente admisible) se obtiene:
0T T
e x t in t
u f u f (3.21)
Donde el primer término representa el trabajo virtual realizado por las cargas externas
aplicadas (W), y el segundo termino el trabajo realizado por las fuerzas internas, este
ultimo es equivalente a la energía por deformación acumulada por el cuerpo (U). La
anterior expresión puede ser escrita de forma compacta como:
Entonces:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
87
0U W (3.22)
representa el potencial de energía del cuerpo. Entonces esta última expresión nos
permite establecer el siguiente principio:
Figura 3.2. Variación de f(x) en un punto extremo (en este caso un mínimo).
En el estado de equilibrio, un cuerpo sólido alcanza un estado de mínima energía
potencial, es decir, de todos las posibles configuraciones en el estado deformado, el
cuerpo se deformará según el campo de desplazamiento que genere un valor mínimo del
funcional de energía.
3.4.1 Potencial Elástico
La energía de deformación para el caso de cuerpos elásticos, está dada por la expresión
(3.13):
1
0 02
T T TU d d d
ε Dε ε Dε ε σ
(3.23)
El trabajo realizado por las fuerzas externas está compuesto por el trabajo realizado por
las fuerzas de superficie y por el trabajo realizado por las fuerzas de cuerpo:
x
f(x)
df(x)=0
f(x)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
88
W d d
b u t u (3.24)
representa el área de aplicación de la carga y u es el vector de desplazamiento de este
punto. La expresión completa para la energía potencial elástica es entonces:
1
0 02
T T Td d d d d
ε Dε ε Dε ε σ b u t u (3.25)
Se observa que es un escalar que es función del vector de desplazamiento (funcional).
Entonces el problema a resolver puede establecerse como el de encontrar el campo de
desplazamiento que minimice la anterior expresión. Se demuestra que estos
desplazamientos también cumplen con las ecuaciones de Navier. Por lo que el problema
elástico puede ser resuelto a través de ambos métodos. Esta metodología basada en
consideraciones puramente energéticas simplifica en mucho los cálculos y es la base del
método de los elementos finitos.
3.5 Principio de los trabajos virtuales como forma débil de las
ecuaciones de gobierno
Veamos, a través de dos ejemplos, como el campo de desplazamientos determinados a
partir del PTV coincide con el campo de desplazamiento determinado a través de la
solución exacta de las ecuaciones diferenciales de gobierno para un problema dado.
Ejemplo. Determinar el campo de desplazamiento de una barra prismática sometida a
una carga axial en su extremo.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
89

Analicemos nuevamente la barra del ejemplo 2.5, pero esta vez empleando el principio de
los trabajos virtuales. El esfuerzo y deformación en una barra están dados por las
expresiones:
x x
d u
d x y
x x
d uE
d x (3.26)
El esfuerzo aplicado es igual a L. La variación del funcional de energía está dado por la
expresión (3.8) (se ha considerado un área transversal de la barra igual a A):
0
x L L
l l
d u d uA E d x A f u d x u A
d x d x
(3.27)
Integrando por partes el primer término:
0
l
l l
y d v y v v d y (3.28)
Con:
; ; ;
d u d d u d uu d u d v d x d u v u
d x d x d x d x
(3.29)
Reemplazando en (4.33) obtenemos:
00
l
x L L
l
d d uA u E f d x A u u A
d x d x (3.30)
Ya que el desplazamiento en x=0 es cero:
0
l
L LA u u A (3.31)
Solución.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
90
0
x L Ll
l
d d uA u E f d x A u u A
d x d x (3.32)
Para que esta expresión sea igual a cero para cualquier u se debe cumplir:
0
x Ll
d d uE f
d x d x
(3.33)
Lo anterior demuestra que el mínimo del funcional se alcanza cuando se cumple la
ecuación (4.38), la cual es idéntica a la expresión determinada en el capitulo 3, la cual es
la ecuación que rige el comportamiento de una barra cargada axialmente. A la ecuación
(4.38) (y en general a las ecuaciones de gobierno determinadas por el anterior
procedimiento) se les conoce como ecuación(es) de Euler-Lagrange.
Ejemplo 3.2. Hallar la forma débil de la ecuación de equilibrio estático para una
membrana circular de radio R, espesor t, modulo elástico E, y modulo de Poisson v,
simplemente apoyada en su borde. Use explícitamente la ley de Hooke y considere la
presión externa aplicada mediante una equivalencia como fuerza distribuida por unidad de
volumen.
Solución.
La forma débil de la ecuación de equilibrio estático (3.91) se obtiene a partir del principio
del trabajo virtual dado por la expresión (3.26):
0
T T Td d d
ε D ε b u t u (3.34)
No se han considerado deformaciones ni esfuerzos iniciales. En este caso, los vectores
de desplazamiento y deformación están dados simplemente por:
Se obtiene:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
91

; ;2 (1 )
z
z
u Eu
r v
ε u D (3.35)
Los vectores de fuerza de cuerpo y el vector de tensiones se reducen a:
;
2 (1 )
zup E
t v r
b t (3.36)
Reemplazando en (4.39) obtenemos la forma débil de (3.91):
0
2 (1 )0
z z z
z z
r
u u uvd p u d A u
r r E t r
(3.37)
El tercer término de esta expresión es nulo ya que en el borde uz=0, y por tanto z
u =0.
3.6 El Método de Rayleigh –Ritz
Empleando el principio de los trabajos virtuales, presentando en la sección anterior, se
pueden obtener soluciones a problemas con valores en la frontera en elasticidad desde
otro enfoque. En vez de resolver las ecuaciones diferenciales de gobierno en conjunto con
las condiciones de borde e iniciales impuestas (para la mayoría de casos prácticos en
ingeniería es una tarea matemáticamente imposible), podemos interpretar el problema
como uno en el cual se buscan las funciones de desplazamiento que satisfagan las
condiciones de borde e iniciales y que minimice el potencial de energía П de forma
aproximada.
Sin embargo emplear las expresiones integrales desarrolladas en las secciones
precedentes puede llegar a ser tan complicado (o aún mas) que el empleo de las
ecuaciones fuertes de un problema dado.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
92
Por esto, el empleo de técnicas numéricas de solución deben ser empleadas. A través de
estos métodos, se busca una solución aproximada para u(x) que satisfagan de manera
aproximada las ecuaciones de gobierno o la formulación débil de un problema. En ambos
casos, los métodos llevan a la discretización de las ecuaciones, es decir, un problema
continuo, expresado a través de ecuaciones diferenciales (parciales en general),
transformado a un problema discreto a través de la formulación de sistemas de
ecuaciones algebraicas.
La aproximación de la formulación débil de un problema a través de métodos numéricos,
conlleva a métodos sistemáticos que pueden ser implementados computacionalmente de
manera mas rápida que los métodos basados en la aproximación de las ecuaciones de
gobierno. Además, trabajar con formulaciones integrales, implica trabajar con una
expresión compacta y escalar, a diferencia de trabajar directamente con las ecuaciones
de gobierno, que será mas de una.
Métodos de aproximación de ecuaciones integrales en mecánica de sólidos podemos
destacar, por su aplicación práctica en ingeniería hoy en día: Métodos de los Elementos
de Borde (BEM), Método de Colocación (meshless method) y el Método de los Elementos
Finitos (FEM). Este último es el de mayor aplicación de los mencionados, ya que presenta
gran versatilidad de aplicación que los restantes. Este método, desde un punto de vista de
ingeniería, es una extensión del método conocido como método de Rayleigh-Ritz,
ampliamente utilizado en mecánica de sólidos.
3.6.1 Formulación del Método
Este método se implementa a través de los siguientes pasos:
1. Polinomio de prueba. Se asume una solución aproximada para el campo de
desplazamiento en forma de polinomio o en forma de series trigonométricas, pero con
parámetros desconocidos. En general son empleados polinomios de aproximación de
grado n, debido a que son expresiones de fácil manipulación matemática. Estos están
dados por (para el caso unidimensional):
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
93
0
0 0 0
ˆ ( , , )
n n n
i j k
i jk
i j k
u u x y z a x y z u
(3.38)
Donde u0 es un vector de desplazamientos iniciales. Este polinomio de prueba debe
poseer las siguientes características:
- Compatibilidad Cinemática. Debe cumplir las condiciones de borde del problema.
Es decir, debe tener en cuenta los desplazamientos y restricciones impuestos en
la frontera.
- Continuidad y Derivabilidad. Debe ser derivable y continuo tantas veces como lo
exija el funcional de energía (con derivada n-esima distinta de cero tal que no
anule al funcional). Es decir, si el funcional exige una segunda derivada, la función
de prueba debe ser derivable por lo menos dos veces, siendo esta derivada
distinta de cero.
- Completud (completness). Debe ser un polinomio completo, es decir, debe poseer
todos los términos.
- Independencia Lineal. Sus términos deben ser linealmente independientes, es
decir que no exista una relación lineal entre ellos.
2. Aproximación del Funcional de Energía. Se inserta el polinomio de prueba dentro
del funcional de energía para el problema y se integra dicha expresión. La expresión
resultante será función de los coeficientes desconocidos del polinomio.
3. Minimización del Funcional. Ya que el potencial de energía debe ser mínimo en el
equilibrio, estos parámetros pueden ser determinados a través de las condiciones de
minimización:
0
ia
(3.39)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
94

Ya que el funcional es una función algebraica en los coeficientes desconocidos. Este
proceso, genera un sistema de n x n, siendo las incógnitas los parámetros desconocidos.
Este paso completa el proceso de discretización del problema.
4. Solución del sistema de ecuaciones. Por ultimo resolviendo el sistema y se
sustituyen los parámetros hallados dentro del polinomio de aproximación, con lo cual se
obtiene una solución aproximada al problema planteado. El proceso descrito es la base
del método de los elementos finitos en mecánica de sólidos.
Ejemplo. Resolvamos el problema planteado en la sección 2.8.1 a través del método de
Ritz. considerando f = 100 N/m, y S = 80 MPa, A = 0.1 m2 y l = 1 m
Solución. El funcional de energía para este problema está dado por la expresión:
1
2
Td d d
ε Dε b u t u
La cual es obtenida de la expresión (4.24). para el caso especifico tenemos:
( ); ;
u xE
xD ε
El segundo y tercer término se reducen a:
0
l
xd f u d x
b u
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
95

0. . . .
l lld t u A t u A u A
t u
Finalmente se obtiene:
2
1
2
0 0
l l
x l l
d uE A d x f u d x u A
d x
Debemos entonces seleccionar un polinomio de prueba que cumpla con las condiciones
impuestas por el problema. La sección de este polinomio es una tarea de prueba y error.
No existen reglas para su selección, mas bien es un trabajo basado en la experiencia del
analista.
Seleccionamos el polinomio:
1
ˆ ( )u x a x
Ya que cumple con las condiciones de borde impuesta (desplazamiento nulo en x = 0).
Además presenta primera derivada distinta de cero y es un polinomio completo.
Obsérvese que se pudo seleccionar un polinomio de mayor grado, lo cual puede
aumentar la exactitud de la solución. El polinomio seleccionado es el polinomio de menor
grado que cumple con los requerimientos. De esta manera reemplazando en el funcional
e integrando obtenemos:
2 2
1 1
1 1
2 2x l l
E A a l f a l u A
Diferenciando:
2
1
1
10
2x l
E A l a f l lAa
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
96

1
12
2x l
a f l AE A
Figura 3.3. Comparación entre las soluciones exacta y aproximada, para el ejemplo planteado.
Y La solución aproximada al problema es:
1ˆ( ) ( ) 2
2x l
u x u x f l A xE A
La figura 4.2 muestra una grafica que compara la solución exacta dada por la expresión
(3.69) y la expresión aproximada hallada, para los datos dados por el problema. Se
observa la discrepancia en los resultados. Dicho error, no puede ser determinado a priori
en problemas donde la solución exacta es conocida (ya que precisamente es la que se
está determinando). Por tanto, el escoger el polinomio que mejor aproxime la solución es
una tarea crítica en el método. En este problema, un polinomio de segundo grado, este
hubiese coincidido con la solución exacta dada en la sección 2.8.2.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
50
100
150
200
250
x
(2E
A)u
[x]
Exacta
Ritz
Con lo cual se obtiene:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
97

Ejemplo. Determinar mediante el método de Ritz una solución aproximada al problema de
deflexión en la viga presentado en la sección 2.8.2. considerándola simplemente apoyada
en los extremos.
Solución. Nuevamente, la solución parte planteando el funcional de energía a partir de la
expresión (3.24):
1
2
Td d d
ε Dε b u t u
Para una viga tenemos:
2
2;
d wE y
d xD ε
El tercer término se reduce a cero, ya que la viga es simplemente apoyada en los
extremos. El segundo término es:
0
l
xd q w d x
b u
Finalmente se obtiene:
22
2
0 02
l l
x
E I wd x q w d x
x
Para este funcional debemos seleccionar un polinomio de aproximación con segunda
derivada distinta de cero y que genere desplazamientos iguales a cero en los extremos.
Se ha seleccionado el siguiente polinomio:
2
1 2ˆ ( ) ( ) ( )w x a x x l a x x l
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
98
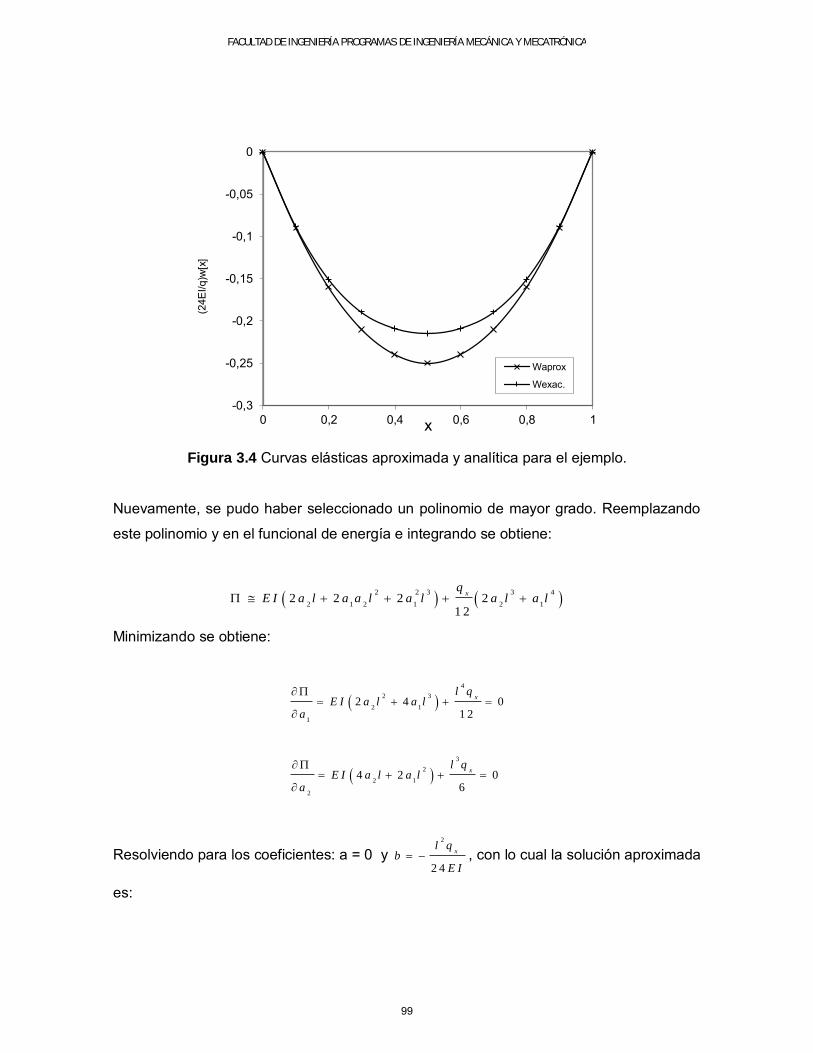
Figura 3.4 Curvas elásticas aproximada y analítica para el ejemplo.
Nuevamente, se pudo haber seleccionado un polinomio de mayor grado. Reemplazando
este polinomio y en el funcional de energía e integrando se obtiene:
2 2 3 3 4
2 1 2 1 2 12 2 2 2
1 2
xq
E I a l a a l a l a l a l
Minimizando se obtiene:
4
2 3
2 1
1
3
2
2 1
2
2 4 01 2
4 2 06
x
x
l qE I a l a l
a
l qE I a l a l
a
Resolviendo para los coeficientes: a = 0 y
2
2 4
xl q
bE I
, con lo cual la solución aproximada
es:
-0,3
-0,25
-0,2
-0,15
-0,1
-0,05
0
0 0,2 0,4 0,6 0,8 1
(24E
I/q)w
[x]
x
Waprox
Wexac.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
99

Figura 3.5 Geometrías discretizadas mediante elementos finitos
2
ˆ ( ) ( )2 4
l qw x x x l
E I
Una grafica de la curva elástica exacta calculada a través de resistencia de materiales y la
curva elástica aproximada es presentada en la figura 4.3. En esta se muestra como existe
un error de aproximación involucrado que puede ser medido como:
3.7 El Método de los Elementos Finitos
En los casos donde E, I, A o las cargas varíen de forma discontinua (e incluso continua),
el método de Rayleigh-Ritz se vuelve complicado o imposible de aplicar, ya que se
dificulta determinar un polinomio de aproximación adecuado para tales casos. Entonces
ayudados por la naturaleza escalar del funcional de energía, se puede fraccionar
(discretizar) la geometría del problema en geometrías más sencillas. Dichas particiones
son conocidas como elementos finitos, de tal manera que:
1
n
to ta l e
e
(3.40)
Donde n es el número de elementos en los cuales ha sido dividida la geometría. Este
sencilla idea de dividir el dominio en sub-dominios finitos da origen al Método de los
elementos Finitos.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
100
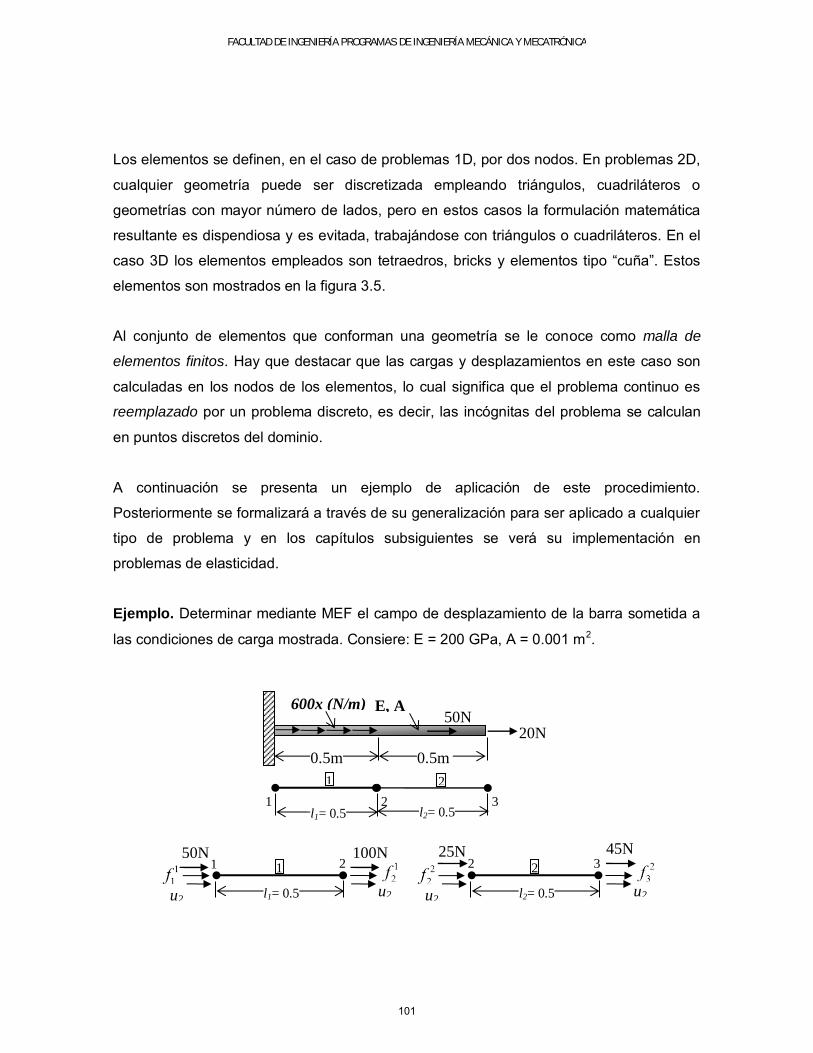
Los elementos se definen, en el caso de problemas 1D, por dos nodos. En problemas 2D,
cualquier geometría puede ser discretizada empleando triángulos, cuadriláteros o
geometrías con mayor número de lados, pero en estos casos la formulación matemática
resultante es dispendiosa y es evitada, trabajándose con triángulos o cuadriláteros. En el
caso 3D los elementos empleados son tetraedros, bricks y elementos tipo “cuña”. Estos
elementos son mostrados en la figura 3.5.
Al conjunto de elementos que conforman una geometría se le conoce como malla de
elementos finitos. Hay que destacar que las cargas y desplazamientos en este caso son
calculadas en los nodos de los elementos, lo cual significa que el problema continuo es
reemplazado por un problema discreto, es decir, las incógnitas del problema se calculan
en puntos discretos del dominio.
A continuación se presenta un ejemplo de aplicación de este procedimiento.
Posteriormente se formalizará a través de su generalización para ser aplicado a cualquier
tipo de problema y en los capítulos subsiguientes se verá su implementación en
problemas de elasticidad.
Ejemplo. Determinar mediante MEF el campo de desplazamiento de la barra sometida a
las condiciones de carga mostrada. Consiere: E = 200 GPa, A = 0.001 m2.
20N
100N
0.5m 0.5m
E, A
2 u2
u2 l2= 0.5
1 u2
u2 l1= 0.5
2 3 1
2 1
l1= 0.5 l2= 0.5
1 2 2 3
600x (N/m)
50N 45N
50N
25N
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
101

Solución. Para aplicar el método de los elementos finitos se discretiza la geometría del
problema (discretización del dominio). Una geometría cualquiera puede ser discretizada
empleando cualquier cantidad de elementos. Diremos en estos momentos que a menor
tamaño de elemento la solución obtenida se encuentra más cercana a la exacta y en el
límite se demuestra que:
0
ˆlime
exa c toh
(3.41)
Donde he es una medida del tamaño del elemento. En este problema emplearemos
inicialmente dos elementos tal como se presenta en la figura del problema. Para el
elemento 1 observamos que en cada nodo existe desplazamiento desconocido, una
fuerza interna igualmente desconocida y pueden existir fuerzas externas aplicadas. Para
este elemento, el funcional de energía está dado por:
2
1 1
1 1 2
0
( 0 ) ( )2
el
e
E A d ud x A u A u l
d x
(3.42)
La función exacta de desplazamiento u(x) en el elemento será entonces aproximado a
través de un polinomio de interpolación, para así aplicar el método de Rayleigh-Ritz.
Emplearemos un polinomio de primer grado (no puede ser empleado un polinomio de
mayor grado, ya que se requieren mas nodos). El polinomio lineal a emplear es de la
forma:
2 2 1 2
ˆ( ) ( )u x u x a x b x x x (3.43)
De tal manera que cumpla con las condiciones de borde para este elemento, es decir que
u = u1 en x = 0 y u = u2 en x = le. Con estas condiciones las constantes a y b pueden ser
calculadas:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
102

b = 0 y 2
e
ua
l
(3.44)
De tal manera que el polinomio de interpolación para el primer elemento es:
2
2 1 2ˆ ( )
e
uu x x x x x
l
(3.45)
En este caso el desplazamiento nodal u2 es una incógnita del problema. Para este
elemento, el funcional de energía aproximado es igual a:
20 .5
1 11 1 2
1 1 1 2 2
102
E A udx d x f u f u
d x l
(3.46)
Integrando se obtiene:
2 1 2
1 1 1 2 1 1 1 2E A u f u f u (3.47)
La carga externa aplicada de 100N aún no es aplicada, ya que esta es una carga externa.
Para el elemento 2 se tiene el polinomio de aproximación:
2 2 2 3
ˆ( ) ( )u x u x a x b x x x (3.48)
Con las condiciones en los nodos: u(x2) = u2 y u(x3) = u3, se obtienen las constantes a y b
y el polinomio de interpolación para este elemento es:
3 2
2 2 2 1 2
2
ˆ ( ) ( )u u
u x x x u x x xl
(3.49)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
103

21
2 23 22 2
2 2 2 2 3 3
20 .52
u uE A dx u d x f u f u
d x l
(3.50)
Integrando se obtiene:
2 2 2
2 2 2 3 2 2 2 3 3E A u u f u f u (3.51)
Entonces el funcional total para la barra, aproximado por elementos finitos es:
222 1 1 2 2
1 1 2 1 1 2 2 2 2 3 2 2 2 3 3
1
ˆ ˆto ta l i
i
E A u f u f u E A u u f u f u
(3.52)
Considerando 1 2 3
( , , )u u u podemos minimizar este funcional haciendo
ˆ 0to ta l i
u (método de Rayleigh-Ritz):
1
2 1 1
1
1 2
2 1 3 2 2 2
2
2
3 2 3
2
0
0
0
e
e e
e
E Au u f
u l
E A E Au u u u f f
u l l
E Au u f
u l
(3.53)
En forma matricial:
1
1 1
1 2
2 2 2
2
3 3
1 1 0
1 2 1
0 1 1e
u f
E Au f f
lu f
(3.54)
El funcional de energía aproximado para este elemento es:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
104

Ahora, la carga distribuida en el elemento 1, debe ser discretizada, es decir, debe ser
llevada a los nodos. Estas cargas equivalentes en los nodos son estáticamente
equivalentes a la carga distribuida. De esta manera se halla que la carga en el nodo 1
debe ser igual a 50 N y en el nodo 2 igual a 100 N (en los próximos capítulos se
desarrollará un procedimiento formal para la discretización de este tipo de cargas).
Por otra parte, la relación entre las cargas externas y las cargas internas en los nodos, se
obtiene a través de la condición de equilibrio:
e
i iF f (3.55)
Donde Fi es la resultante de las fuerzas externas aplicada al nodo i y e
if es la fuerza
interna aportada por el elemento e sobre este nodo. Entonces para cada nodo se tiene:
1
1 1
1 2
2 2
2
3
5 0
1 0 0 2 5
2 0 2 5
R f
f f
f
n o d o 1 :
n o d o 2 :
n o d o 3 :
(3.56)
Reemplazando en (4.60) se obtiene:
1 1
2
3
1 1 0 5 0
1 2 1 1 2 5
0 1 1 4 5e
u R
E Au
lu
(3.57)
Además: u1 = 0, lo cual permite eliminar la primera fila y columna del anterior sistema (ya
que quedan multiplicadas por cero), lo cual permite eliminarlas de (4.62):
1 1
2
3
1 1 0 5 0
1 2 1 1 2 5
0 1 1 4 5e
u R
E Au
lu
(3.58)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
105

Figura 3.6. Comparación de soluciones exacta y aproximada por MEF del ejemplo planteado
2
3
2 1 1 2 5
1 1 4 5e
uE A
ul
(3.59)
Resolviendo se obtiene: u2 =170(le/EA) u3 = 215(le/EA). La reacción en el apoyo puede ser
calculada a través de la primera ecuación:
1 1 2
5 0 1 7 0 5 0 2 2 0e
e e
lE A E AR u u N
l l E A
(3.60)
El esfuerzo normal desarrollado es calculado al interior de cada elemento como:
1 2
1
3 22
2
ˆ ( )1 7 0
ˆ ( )4 5
x x x x
x x x x
d u x uE E k P a
d x l
u ud u xE E k P a
d x l
E le m e n to 1 :
E le m e n to 2 :
(3.61)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
20
40
60
80
100
120
x
EA
u(x
)
M.E.F.
Exacta
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-300
-200
-100
0
100
200
300
400
x
P(x
)
M.E.F.
Exacta
Con lo cual se obtiene el sistema reducido:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
106

Lo cual completa los cálculos. La figura 4.5 muestra una gráfica donde se compara la
solución exacta del problema con la solución hallada por MEF. Se observa una
discrepancia marcada entre ambas soluciones. El próximo ejemplo muestra como esta
discrepancia puede reducirse e incluso eliminarse.
3.8 Generalización de la Formulación por Elementos Finitos
3.8.1 Minimización del Potencial Elástico
Sin entrar a considerar la rigurosidad ni las bases matemáticas del tema, la minimización
de , puede obtenerse fácilmente, si consideramos la expresión (3.24) como función de ,
, b, u y t, tratándola como una función escalar de múltiples variables6. De esta manera, la
minimización puede llevarse a cabo obteniendo la derivada total de e igualándola a cero
(primera variación de ):
0
ε u
ε u (3.62)
Solo se mantienen los términos relacionados con los desplazamientos. Se ha empleado el
símbolo para indicar que la derivada es con respecto a la variación de una función (en
este caso u). Aplicando (3.7) a (3.6), se obtiene:
0 00
T T T T Td d d d d
ε D ε b u t u ε D ε ε σ (3.63)
Para ver esto, consideremos la variación de una función escalar f(x) tal como la que se
muestra en la figura (4.2). En ella se observa como en el mínimo, se cumple la condición:
df(x)=0, lo cual es equivalente a establecer: ( ) 0d f x d x .
6 En realidad: , , f, u son funciones y no variables algebraicas. Entonces es una función de funciones y específicamente es un funcional, definido este como una expresión integral que genera un escalar. Así, el
trabajo mecánico definido en su forma tradicional por el funcional: s
W F d s .
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
107

Por otra parte, en el caso más general de un cuerpo bajo una respuesta no elástica, la
energía interna está dada por la expresión (4.7):
0
( )U d d F d
σ ε σ (3.64)
con:
0
( )F d
σ σ ε
(3.64b)
La variación de este término es:
0
;F F d
U d dd
ε σ ε σε
U d
σ ε
(3.65)
La variación del funcional es entonces:
T T Td d d
σ ε b u t u (3.66)
Una formulación general para el método de los elementos finitos puede obtenerse a partir
de las expresiones (3.8) para el caso de cuerpos elásticos. Consideremos un polinomio de
interpolación para el campo de desplazamiento al interior de un elemento, puede
escribirse de la forma general:
e
u Na (3.67)
Donde ae, es el vector de desplazamientos nodales y N es la matriz de funciones de
forma. Estas, aparecen al rescribir un polinomio de aproximación, de tal manera que sus
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
108

coeficientes sean funciones de la variable espacial y como incógnitas los desplazamientos
en los nodos. Por ejemplo al rescribir el polinomio de interpolación para el elemento 2 del
ejemplo 4.5, se tiene:
3 2
2 2 3 2 2 3 3
2 2 2
2
2 3
3
ˆ ( ) 1
ˆe
u u x xu x x u u u N u N u
l l l
uN N
u
u N a
(3.68)
Donde N2 y N3 son las funciones de forma para los nodos 2 y 3 de elemento 2. Hay que
resaltar, sin embargo, que en este ejemplo N es un vector, como caso particular. En los
capítulos siguientes se trabajará mas este concepto y en el capitulo 9 se presenta la
formalización de estas funciones. Por otra parte, la variación ε se calcula como:
e e
ε S u S Na S N a (3.69)
Reemplazando en (4.67):
0 00
T TT T T
e e e e
T T T TT T
e e
d d d
d d
a N S D S N a b N a t N a
a N S D ε a N S σ
(3.70)
Haciendo: B S N , reordenando y tendiendo en cuenta que la anterior expresión debe
cumplirse para cualquier 0e
a se obtiene finalmente:
0 0
0T T T T T
ed d d d dB D B a N b N t B D ε B σ
(3.71)
La cual representa las ecuaciones de equilibrio discretizadas para un elemento cualquiera
y puede ser escritas en forma compacta como:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
109

e e e e
K a f q (3.72)
Donde:
T
ed
K B D B
(3.73)
0 0
T T T
d d d
e
f N b B D ε B σ
(3.74)
T
d
e
q N t (3.75)
Ke se conoce como la matriz de rigidez del elemento. fe es el vector de fuerzas nodales de
cuerpo y qe es el vector de fuerzas internas equivalentes en los nodos. El armado del
sistema global para todo el cuerpo se obtiene a partir de la ecuación 4.46, es decir,
estableciendo la condición de equilibrio en cada uno de los nodos definidos en la malla.
Este procedimiento conlleva al sistema global de ecuaciones dado por:
1 1 1
n n n
e e e e
e e e
K a f q
(3.76)
Cabe resaltar que anterior ecuación se hace aplicable a cualquier tipo de problema en
elasticidad lineal, independientemente de la dimensionalidad del problema, teniendo en
cuenta, naturalmente, las hipótesis de deformación consideradas en cada caso. E
inclusive, se hace extensivo a problemas donde la respuesta del material ya no elástica y
a problemas en mecánica de fluidos y transferencia de calor, en donde las matrices y
vectores tienen su interpretación propia.
Ejemplo . A partir de la expresión (4.76) resuelva el problema el problema anteriormente
planteado.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
110

Solución. En este caso, sea ˆ ( )u x un polinomio de aproximación para un elemento en
general definidos por los nodos i, j:
ˆ ( ) 1i j i j i j
e e
x xu x u u N u N u
l l
(3.77)
La matriz B está dada por:
1
[ ] 1 1i j
e
dN N
d x lB S N
(3.78)
Para este problema, la matriz D simplemente se reduce a D = E. entonces se tiene
empleando (4.73):
1
1 11 1
1 1 1e
e e e
e e e
e e el
e
l E AE A d x
l l l
l
K
(3.79)
El Vector de fuerzas nodales internas es obtenido a través de la expresión (4.75):
e
1 2
e v a lu a d a e n x = x i e v a lu a d a e n x = x j
1 1
T Te
i
e
je e e eA A
fx x x xd A d A
fl l l lq t t
(3.80)
Entonces el sistema de ecuaciones para un elemento está dado por:
1 1
1 1
e e
i ie e
e e ee e
j je
u fE A
u flK u q
(3.81)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
111
Para el elemento 1:
1 1
1 1
1 1
2 2
1 1
1 1
u fE A
l u f (3.82)
Para el elemento 2:
2 2
2 2
2 2
3 3
1 1
1 1
u fE A
l u f (3.82b)
Donde se ha considerado E A l constante para los elementos. El sistema global de
ecuaciones se obtiene a partir de (4.76) y considerando la compatibilidad entre
desplazamientos nodales se tiene:
1
1 1
1 2
2 2 2
2
3 3
1 1 0
1 2 1
0 1 1
u f
E Au f f
lu f
(3.83)
Que es igual al sistema (4.60). Se observa entonces como el método generalizado
expuesto en esta sección permite un procedimiento sistematizado para la formulación por
elementos finitos de un problema en particular.
Ejemplo. A partir de la forma débil hallada para una membrana, use el polinomio de
aproximación: u(r)=a+br+cr2 con funciones de forma adecuadas para discretizar el
problema en su forma débil y convertirlo en un sistema algebraico de ecuaciones.
Compare esta solución aproximada, con la solución hallada a partir de la forma fuerte del
problema.
Las anteriores ecuaciones, aplicadas específicamente al problema son:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
112

Solución. El polinomio de aproximación: u(r)=a+br+cr2. Este, debe cumplir las siguientes
condiciones de borde:
3
1
0 ,
, / 2
, 0
z
z
z
u r R
u u r R
u u r
En este caso se ha ubicado un nodo en r = R/2. Resolviendo para a, b y c y reorganizando
términos, obtenemos las funciones de forma:
2 2 2
1 2 32 2 2
1 1 2 2 3 3
3 2 2 4 4( ) (1 ) ( ) ( )
( )
r r r r r ru r u u u
R R R R R R
u r N u N u N u
La figura 3.7 muestra estas funciones. Observe como estas son iguales a uno en el nodo
de la función y cero en otros nodos. Ahora, la matriz S en coordenadas cilíndricas está
dada por:
0 0
1 10
0 0
1 1
0
10
z
r
r r
u
z
r r
z r
z r
S
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
113

Figura 3.7. Funciones de forma utilizadas en el ejemplo planteado
[ ]z
u
r
S
La matriz D para este problema está dada por:
2 (1 )
E
v
D
La matriz B está dada por:
1 2 3 2
1[ ][ ] 3 4 4 4 8N N N R r R r R r
r RB S N
Se observa como las deformaciones unitarias y por tanto los esfuerzos en el elemento son
interpolados linealmente, ya que:
; ε Bu σ DBu
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
r R
N1 N2
N3
La cual se reduce simplemente a considerar:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
114

1 41
3 3
1 14
2 (1 ) 3
1 6
3
T e
e
E td
v
s im e tr ic a
K B D B
4
3
0
0T
d P R
ef N b
El sistema completo de ecuaciones está dado por (3.69):
1
2
4
3 3
1 41
3 30
1 14 0
2 (1 ) 3
1 6
3
e
u
E tu P R
vu
s im e tr ic a
El sistema reducido tiene en cuenta el hecho de que en los nodos 1 y 3 las fuerzas
externas aplicadas (y por consiguiente las internas) son iguales a cero:
1
3
401
34
4 1 63
3 3
e
uG t p R
u
Resolviendo:
2 2
2 2
3 2 3 4 4( ) (1 ) ( )
8e e
P R r r P R r ru r
G t R R G t R R
Con las anteriores expresiones se obtiene:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
115
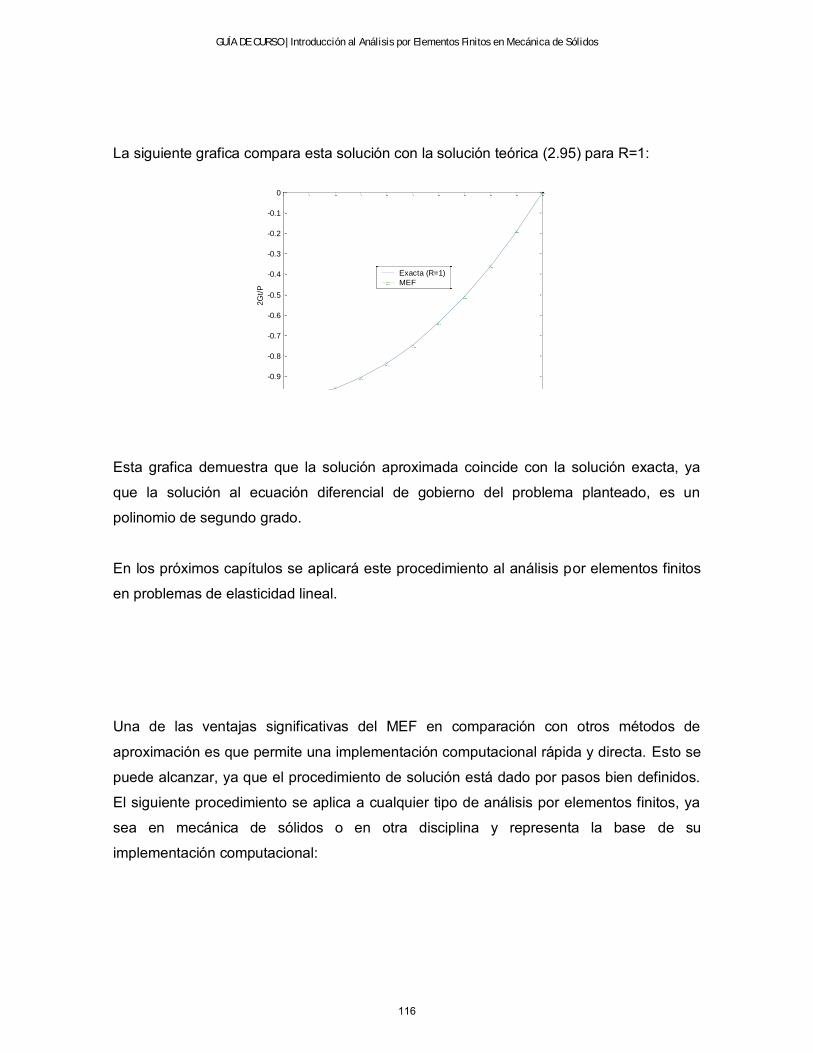
Esta grafica demuestra que la solución aproximada coincide con la solución exacta, ya
que la solución al ecuación diferencial de gobierno del problema planteado, es un
polinomio de segundo grado.
En los próximos capítulos se aplicará este procedimiento al análisis por elementos finitos
en problemas de elasticidad lineal.
Una de las ventajas significativas del MEF en comparación con otros métodos de
aproximación es que permite una implementación computacional rápida y directa. Esto se
puede alcanzar, ya que el procedimiento de solución está dado por pasos bien definidos.
El siguiente procedimiento se aplica a cualquier tipo de análisis por elementos finitos, ya
sea en mecánica de sólidos o en otra disciplina y representa la base de su
implementación computacional:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
2G
t/P
r/R
Exacta (R=1)
MEF
La siguiente grafica compara esta solución con la solución teórica (2.95) para R=1:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
116
juangabriel
Texto escrito a máquina
juangabriel
Texto escrito a máquina
3.9 Procedimiento General de Análisis
1. Discretización del dominio: definir número de nodos, ubicación y número de
elementos a emplear.
2. Numerar nodos y elementos
3. Determinar la matriz de rigidez para cada uno de los elementos, así como el vector
de fuerzas externas si existe.
4. Ensamblar la matriz global de rigidez y los vectores de desplazamiento nodal y
vectores de fuerza interna y carga distribuida y existe
5. Ubicar las fuerzas externas en el vector global de carga a través de la expresión:
e
i iF f
.
6. Reducir el sistema según los grados de libertad conocidos.
7. Resolver el sistema y a partir de los desplazamientos nodales calcular fuerzas
internas, esfuerzos y deformaciones unitarias si es el caso. Realizar graficas de
estas variables.
8. Realizar un análisis de convergencia para determinar una solución adecuada según
el grado de precisión deseado y validar el modelo con respecto a resultados
experimentales o soluciones analíticas aproximadas.
El procedimiento general de análisis por elementos finitos puede ser resumido así:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
117
Capitulo 4.
Analisis de Armaduras y Marcos
4.1 Introducción
El capitulo presenta una introducción a la formulación por elementos finitos de problemas
que involucran elementos estructurales unidimensionales, que incluyen las barras con
carga axial, ejes y vigas prismáticas, lo cuales componen las armaduras y marcos planos
y espaciales, siguiendo la metodología presentada en el capitulo anterior.
Inicialmente se presentan los elementos de barra con fuerza axial, para luego
generalizarlos a elementos de armaduras planas y espaciales. Posteriormente se aborda
el análisis de vigas, donde se consideran barras con carga axial y de flexión. Igualmente,
se generaliza este elemento al caso 2D y 3D lo cual permite analizar fácilmente marcos
planos y espaciales. En este ultimo caso se desarrolla un elemento con capacidad de
considerar momentos torsionales.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
119

4.2 Barras Sometidas a Fuerzas Axiales
La matriz de rigidez y las fuerzas nodales para un elemento de barra, son determinadas a
partir de las expresiones (4.72) a (4.75) escritas nuevamente aquí:
e e e e
K a f q (4.1)
Donde:
T
ed
K B D B
(4.2)
0 0
T T T
d d d
e
f N b B D ε B σ
(4.3)
T
d
e
q N t (4.4)
La relación existente entre los desplazamientos y las deformaciones unitarias es:
= = ( )ε Sud
u xd x
(4.5)
Lo cual indica que el polinomio de interpolación por lo menos debe tener primera derivada
distinta de cero. Como ya se vio el polinomio de menor grado es del tipo lineal, tal como
se presentó en (3.77):
ˆ ( ) 1 N ai j i j i j
e e
x xu x u u N u N u
l l
(4.6)
Reemplazando (5.6) en (5.5):
= =ε Su S N a Ba aji
d Nd N
d x d x (4.7)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
120
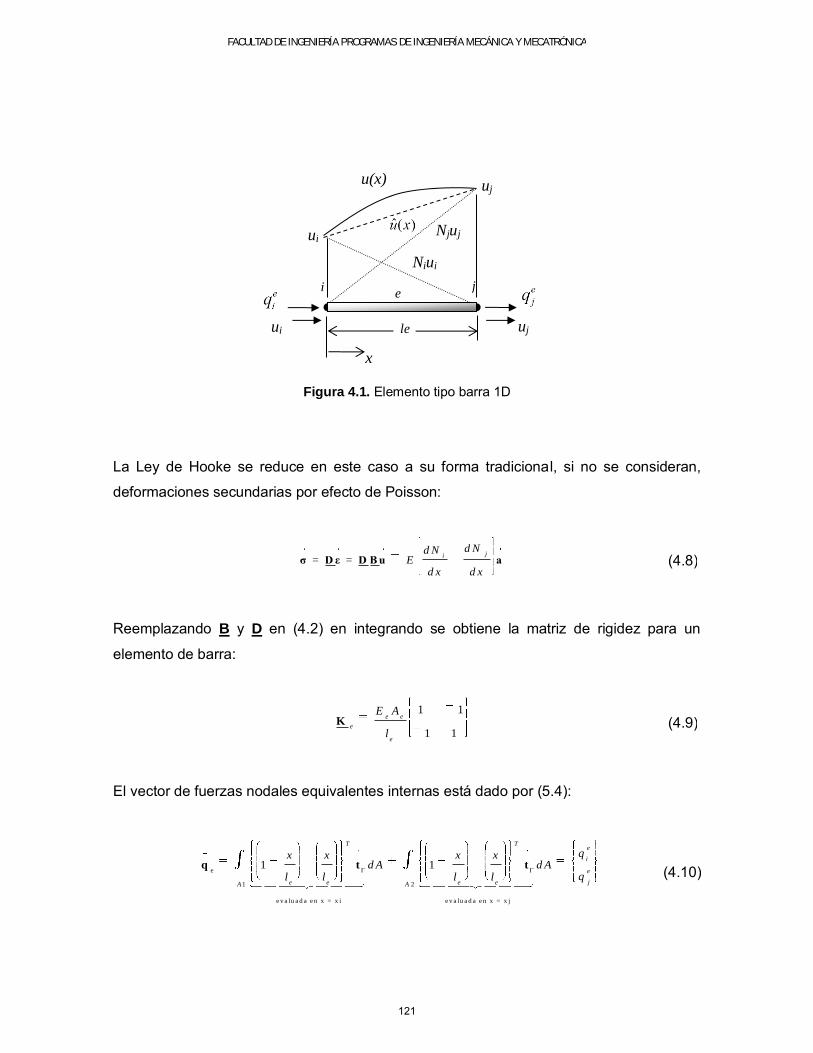
Figura 4.1. Elemento tipo barra 1D
La Ley de Hooke se reduce en este caso a su forma tradicional, si no se consideran,
deformaciones secundarias por efecto de Poisson:
= =σ D ε D Bu aji
d Nd NE
d x d x (4.8)
Reemplazando B y D en (4.2) en integrando se obtiene la matriz de rigidez para un
elemento de barra:
1 1
1 1K
e e
e
e
E A
l (4.9)
El vector de fuerzas nodales equivalentes internas está dado por (5.4):
e
1 2
e v a lu a d a e n x = x i e v a lu a d a e n x = x j
1 1q t t
T Te
i
e
je e e eA A
qx x x xd A d A
ql l l l
(4.10)
e
uj
ui le
i j
x
u(x)
uj
ui Njuj
Niui
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
121

Las fuerzas nodales equivalentes generadas por la fuerza distribuida constante a lo largo
del elemento es calculada como:
0
11
12N b
le
T
i j ed N N fd x fl
(4.11)
El efecto de deformaciones térmicas puede calcularse a través de la expresión:
0
0
11 1
1f B D ε
le
TT e
T e
e
Ad E T d L A E T
l
(4.12)
El vector de fuerzas nodales total está dado por:
1 11
1 12f q
e
i
e e e e e e e
j
qf A E T
q
(4.13)
Con lo cual el sistema (4.1) queda completo. La solución del problema sigue los pasos
indicados en la sección 3.7.1 del capitulo 3.
Hay que resaltar, que la carga constante uniformemente distribuida es discretizada
(reemplazada) por dos fuerzas equivalentes aplicadas en los nodos del elemento e igual a
la mitad de la carga total. Si la carga varía en forma general f(x), la expresión no es valida
y deberá desarrollarse una expresión especifica para cada caso. De igual manera sucede
con el área transversal y el modulo elástico del elemento. En estos casos la integración
puede realizarse mediante métodos numéricos, lo cual, en general es un proceso
engorroso, por lo que estos parámetros son aproximados considerándolos constantes en
el elemento empleando para ellos valores promedios.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
122
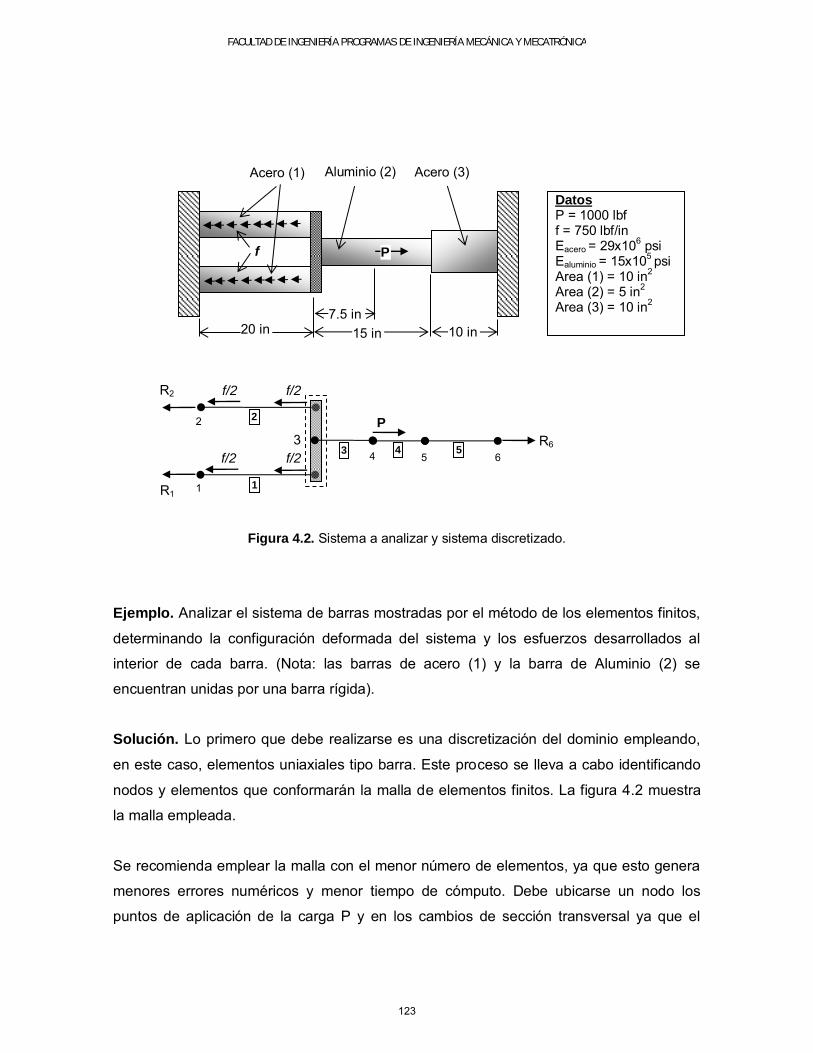
Figura 4.2. Sistema a analizar y sistema discretizado.
Ejemplo. Analizar el sistema de barras mostradas por el método de los elementos finitos,
determinando la configuración deformada del sistema y los esfuerzos desarrollados al
interior de cada barra. (Nota: las barras de acero (1) y la barra de Aluminio (2) se
encuentran unidas por una barra rígida).
Solución. Lo primero que debe realizarse es una discretización del dominio empleando,
en este caso, elementos uniaxiales tipo barra. Este proceso se lleva a cabo identificando
nodos y elementos que conformarán la malla de elementos finitos. La figura 4.2 muestra
la malla empleada.
Se recomienda emplear la malla con el menor número de elementos, ya que esto genera
menores errores numéricos y menor tiempo de cómputo. Debe ubicarse un nodo los
puntos de aplicación de la carga P y en los cambios de sección transversal ya que el
P f
Acero (1) Aluminio (2) Acero (3)
20 in 15 in 10 in
7.5 in
Datos P = 1000 lbf f = 750 lbf/in Eacero = 29x10
6 psi
Ealuminio = 15x105 psi
Area (1) = 10 in2
Area (2) = 5 in2
Area (3) = 10 in2
P
R2
1 R1
3
6
2
4
R6
5 5 4 3
2
1
f/2 f/2
f/2 f/2
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
123

método solo considera cargas e incógnitas definidas en nodos y las matrices de rigidez
consideran valores constantes tanto para áreas como para modulo elástico.
Igualmente hay que observar que la barra que une las barras de acero y Aluminio, por ser
rígida actúa como un nodo, a pesar que a ella se unan tres barras. Esto debido a que los
desplazamientos de los nodos de cada barra en este punto son iguales. En esta figura se
muestra como los efectos de los apoyos son sustituidos por reacciones (fuerzas
desconocidas) R en los nodos 1, 2 y 6.
Las matrices de rigidez y vectores de fuerza nodal equivalente para cada uno de los
elementos son:
Elemento 1:
1
16 1
1
3 3
1 1 11 4 .5 1 0 7 5 0 0
1 1 1
u q
u q
Elemento 2:
2
26 2
2
3 3
1 1 11 4 .5 1 0 7 5 0 0
1 1 1
u q
u q
Elemento 3:
3
36 3
3
4 4
1 11 1 0
1 1
u q
u q
Elemento 4:
4
46 4
4
5 5
1 11 1 0
1 1
u q
u q
Elemento 5:
5
56 5
5
6 6
1 12 9 1 0
1 1
u q
u q
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
124

El sistema global de ecuaciones, lo cual se realiza ensamblando la matriz global de
rigidez, los vectores de carga interna y fuerzas externas aplicadas, está dado por:
1
2
36
4
5
6
1 4 .5 0 1 4 .5 0 0 0 0 7 5 0 0
0 1 4 .5 1 4 .5 0 0 0 0 7 5 0 0
01 4 .5 1 4 .5 3 0 1 0 0 1 5 0 0 01 1 0
1 0 0 00 0 1 2 1 0 0
00 0 0 1 3 0 2 9 0
0 0 0 0 2 9 2 9 0 0
R
R
u
u
u
R
Teniendo en cuenta los desplazamientos conocidos: u1 = u2 = u6 = 0 el sistema reducido
es:
3
6
4
5
3 0 1 0 1 5 0 0 0
1 1 0 1 2 1 1 0 0 0
0 1 3 0 0
u
u
u
Resolviendo:
4
3
4
4
6
5
4 .9 1 1 0
2 .5 8 1 0
8 .6 2 1 0
u
u
u
a plg.
Ahora, los esfuerzos desarrollados en cada barra pueden ser determinados a partir de la
expresión (4.8), considerando los desplazamientos nodales para cada elemento:
ˆ ( )D Ba
e
e e e
d u xE
d x
De esta manera se obtiene:
1 3 4 57 2 5 , 1 5 1 .6 , 4 9 .8 7 6 , 2 4p s i p s i p s i p s i
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
125
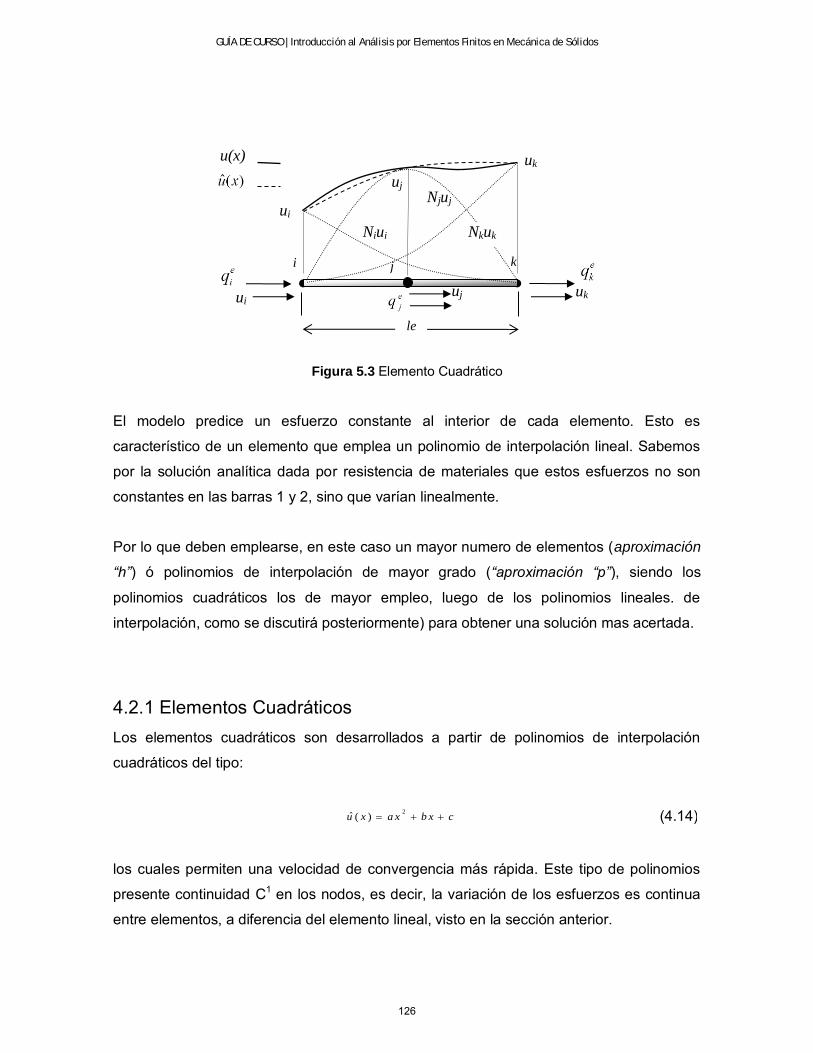
Figura 5.3 Elemento Cuadrático
El modelo predice un esfuerzo constante al interior de cada elemento. Esto es
característico de un elemento que emplea un polinomio de interpolación lineal. Sabemos
por la solución analítica dada por resistencia de materiales que estos esfuerzos no son
constantes en las barras 1 y 2, sino que varían linealmente.
Por lo que deben emplearse, en este caso un mayor numero de elementos (aproximación
“h”) ó polinomios de interpolación de mayor grado (“aproximación “p”), siendo los
polinomios cuadráticos los de mayor empleo, luego de los polinomios lineales. de
interpolación, como se discutirá posteriormente) para obtener una solución mas acertada.
4.2.1 Elementos Cuadráticos
Los elementos cuadráticos son desarrollados a partir de polinomios de interpolación
cuadráticos del tipo:
2
ˆ ( )u x a x b x c (4.14)
los cuales permiten una velocidad de convergencia más rápida. Este tipo de polinomios
presente continuidad C1 en los nodos, es decir, la variación de los esfuerzos es continua
entre elementos, a diferencia del elemento lineal, visto en la sección anterior.
uk
ui
le
i k
u(x)
uk
ui
Njuj
Niui
j
uj
Nkuk
uj
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
126

Para determinar la matriz de rigidez para un elemento cuadrático, tomemos un elemento
de barra de tres nodos como, tal como se muestra en la figura 5.3. El nodo 3 se ha
introducido con el fin de definir un polinomio cuadrático. La ubicación de este puede ser
cualquiera entre los nodos 1 y 2. Pero se demuestra que su ubicación en la mitad del
elemento genera las mejores aproximaciones. Para el cálculo de los coeficientes del
polinomio û(x) se emplean las condiciones:
( ) ; ( ) ; ( )i i j j k k
u x u u x u u x u (4.15)
Reemplazando estas condiciones en (5.14) luego de reordenar términos:
ˆ ( ) N ai i i j k k
u x N u N u N u
con:
1 2 3
2
2 21 1 ; 4 1 ; 1
e e e e e
x x x x x xN N N
l l l l l l
[0 , ]x le
(4.16)
La matriz de rigidez para el elemento cuadrático se obtiene a partir de (5.2), aplicando el
mismo procedimiento mostrado en la sección 5.2:
7 8 1
8 1 6 83
1 8 7
Ke e
e
e
E A
l
(4.17)
Para este elemento, el vector de fuerzas nodales equivalentes generadas por una fuerza
distribuida constante es:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
127
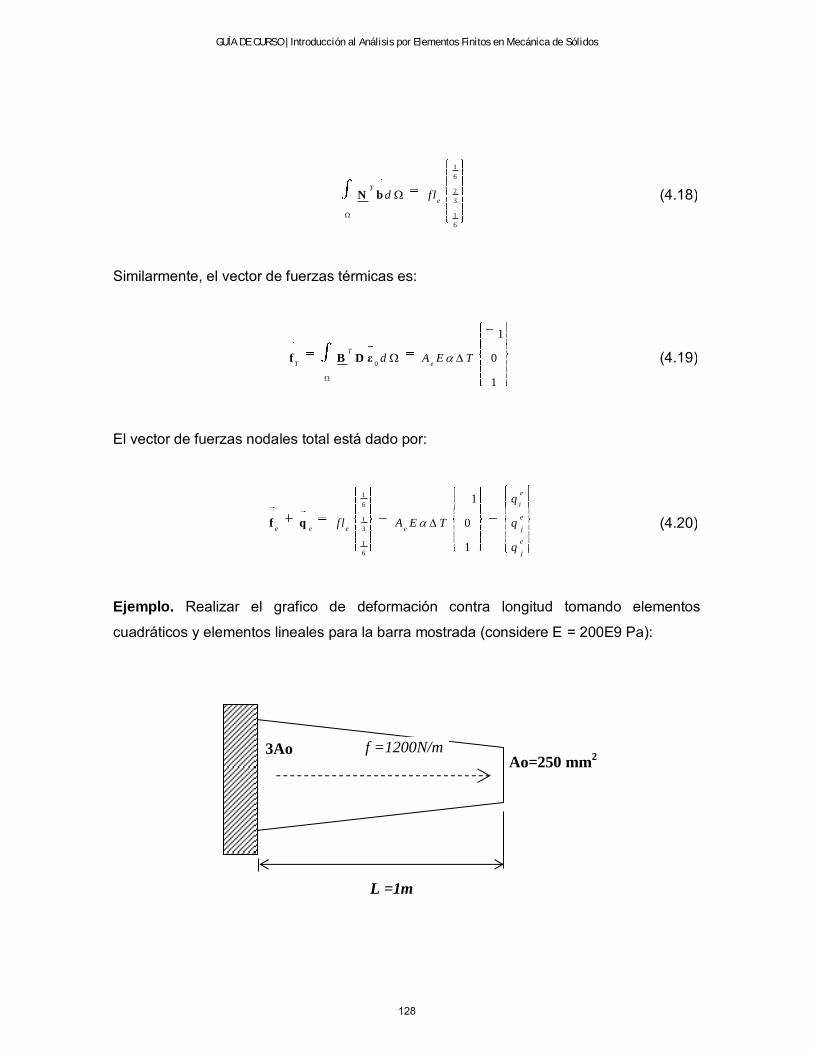
1
6
2
3
1
6
T
ed f l
N b
(4.18)
Similarmente, el vector de fuerzas térmicas es:
0
1
0
1
f B D εT
T ed A E T
(4.19)
El vector de fuerzas nodales total está dado por:
1
6
1
3
1
6
1
0
1
f q
e
i
e
e e e e j
e
j
q
f l A E T q
q
(4.20)
Ejemplo. Realizar el grafico de deformación contra longitud tomando elementos
cuadráticos y elementos lineales para la barra mostrada (considere E = 200E9 Pa):
3Ao Ao=250 mm
2
L =1m
f =1200N/m
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
128

Solución.
Aproximación lineal:
Se considerarán cuatro elementos de área constante iguales a: A1 = 2.5A0, A2 = 2.0A0, A3
= 1.5A0, A4= A0 e igual longitud.
Cálculo de matrices de los elementos:
1 2
21 1 1
1 21 2
32 2 2
3
23 1
3 43
4 2
1 1 1 12 .5 ; 2
1 1 1 1
1 1 1 11 .5 ;
1 1 1 1
uu q qk k
uu q q
uu qk k
u q
K K
K K
4
1
4
3 2
0
c o n :
e
q
u q
E Ak
l
A partir de estas matrices es armado el sistema global de ecuaciones y considerando la
condición de desplazamiento en el nodo 1 se obtiene el sistema reducido:
1 2
2 2 1
2 3
3 2 10
3 4
4 2 1
4
5 2
4 .5 2 0 0 3 0 0
2 3 .5 1 .5 0 3 0 0
0 1 .5 2 .5 1 3 0 0
0 0 1 1 1 5 0
e
u q q
u q qE A
ul q q
u q
Resolviendo se obtiene: u2=0.0021mm, u3=0.003975mm, u4=0.005475mm,
u5=0.006225mm.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
129
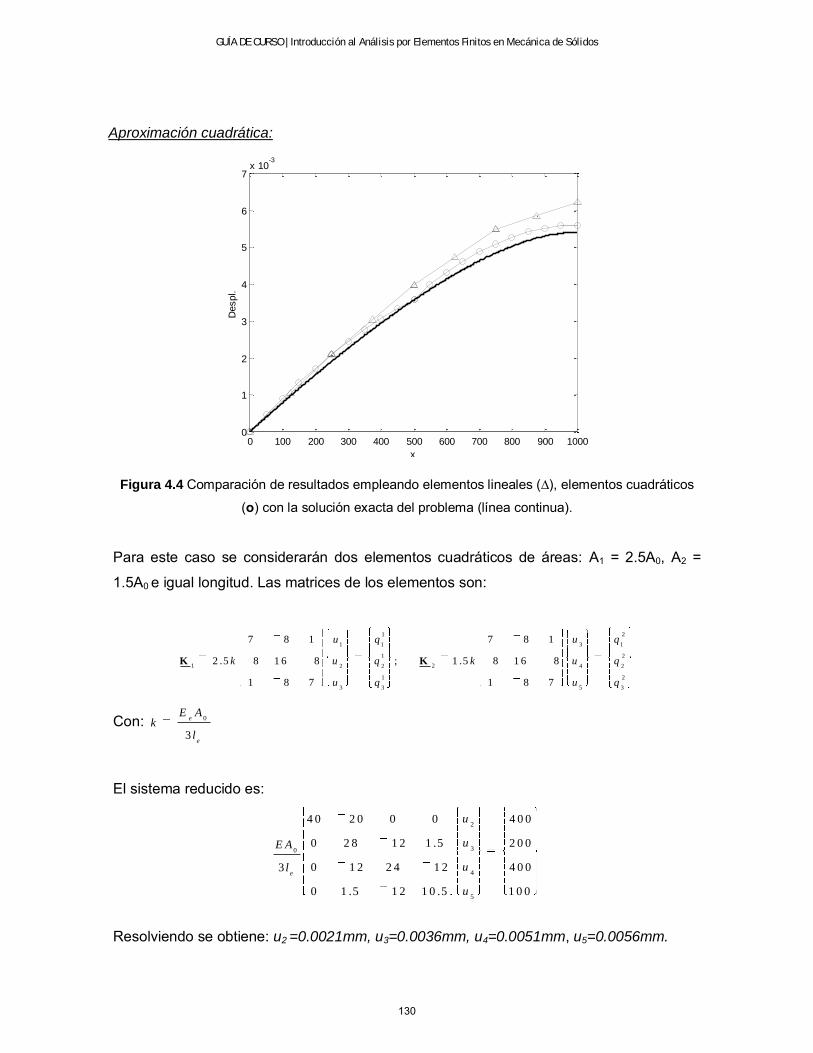
Figura 4.4 Comparación de resultados empleando elementos lineales (∆), elementos cuadráticos
(о) con la solución exacta del problema (línea continua).
Para este caso se considerarán dos elementos cuadráticos de áreas: A1 = 2.5A0, A2 =
1.5A0 e igual longitud. Las matrices de los elementos son:
1 2
1 1 3 1
1 2
1 22 2 4 2
1 2
3 3 5 3
7 8 1 7 8 1
2 .5 8 1 6 8 ; 1 .5 8 1 6 8
1 8 7 1 8 7
u q u q
k u q k u q
u q u q
K K
Con: 0
3
e
e
E Ak
l
El sistema reducido es:
2
30
4
5
4 0 2 0 0 0 4 0 0
0 2 8 1 2 1 .5 2 0 0
0 1 2 2 4 1 2 4 0 03
0 1 .5 1 2 1 0 .5 1 0 0
e
u
uE A
ul
u
Resolviendo se obtiene: u2 =0.0021mm, u3=0.0036mm, u4=0.0051mm, u5=0.0056mm.
0 100 200 300 400 500 600 700 800 900 10000
1
2
3
4
5
6
7x 10
-3
x
Despl.
Aproximación cuadrática:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
130
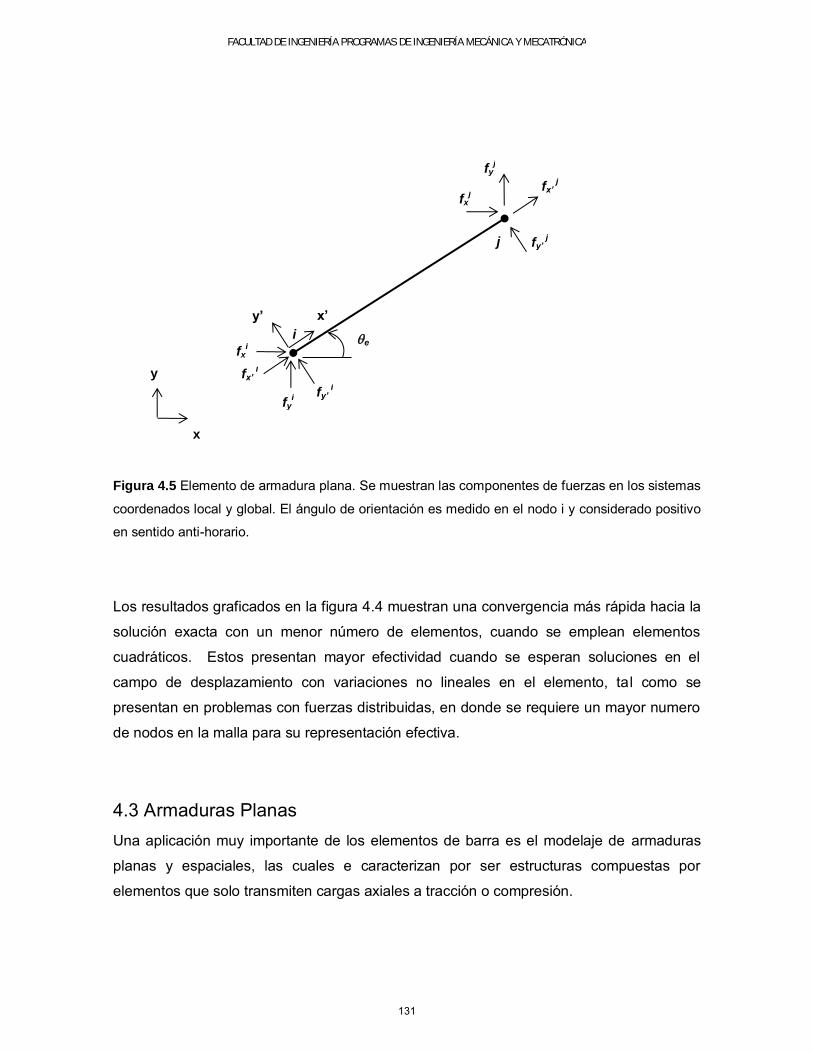
Figura 4.5 Elemento de armadura plana. Se muestran las componentes de fuerzas en los sistemas
coordenados local y global. El ángulo de orientación es medido en el nodo i y considerado positivo
en sentido anti-horario.
Los resultados graficados en la figura 4.4 muestran una convergencia más rápida hacia la
solución exacta con un menor número de elementos, cuando se emplean elementos
cuadráticos. Estos presentan mayor efectividad cuando se esperan soluciones en el
campo de desplazamiento con variaciones no lineales en el elemento, tal como se
presentan en problemas con fuerzas distribuidas, en donde se requiere un mayor numero
de nodos en la malla para su representación efectiva.
4.3 Armaduras Planas
Una aplicación muy importante de los elementos de barra es el modelaje de armaduras
planas y espaciales, las cuales e caracterizan por ser estructuras compuestas por
elementos que solo transmiten cargas axiales a tracción o compresión.
x
y
x’ y’
i
j
fxi
fyi
fxj
fyj
fy’ j
fy’ i
fx’ i
e
fx’ j
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
131

La obtención de la matriz de rigidez para elementos “tipo armadura plana” puede ser
realizada de forma sencilla. Para un elemento de barra orientado según un ángulo
cualquiera a partir del eje horizontal las componentes de desplazamiento y fuerzas
internas en los nodos, tienen dos componentes en la dirección de los ejes globales x y y
tal como se muestra en la figura 4.5.
De esta manera, el sistema de ecuaciones (4.9) para un elemento de barra es expandido
para tener en cuenta las componentes (nulas) de desplazamiento y fuerzas en un par de
ejes locales x’-y’ ubicados en el nodo i (sistema local de coordenadas)7:
' '
' '
' '
' '
1 0 1 0
0 0 0 0
1 0 1 0
0 0 0 0
i i
x x
i i
y ye e
j j
x xe
j j
y y
u r
u rE A
u rl
u r
(4.21)
De la figura observamos una relación directa entre estas componentes locales y las
componentes globales de las fuerzas internas:
' '
' '
c o s s in , c o s s in
s in c o s , s in c o s
i i i j j j
x x y x x y
i i i j j j
y x y y x y
r r r r r r
r r r r r r
(4.22)
Las cuales son obtenidas mediante sumatoria de fuerzas en cada nodo. Matricialmente
pueden ser escritas como:
'
' '
'
'
c o s s in 0 0
s in c o s 0 0
0 0 c o s s in
0 0 s in c o s
ji
xx
j i
y y
e ejj
xx
jj
yy
r r
r r
rr
rr
r Tr (4.23)
7 r = f + q, es el vector de fuerzas nodales total.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
132

Donde T es una matriz ortogonal de transformación. Una expresión similar puede ser
hallada para relacionar desplazamientos locales y los desplazamientos globales: '
e ea Ta
. Reemplazando estas dos expresiones en (5.21) obtenemos:
'
-1 '
e e e
e e e e
K T a Tr
T K T a f q
(4.24)
Como T es ortogonal se tiene que: T-1 = TT se obtiene finalmente:
'T
e e e e T K T a f q (4.25)
En la cual podemos definir la matriz de un elemento de armadura plana como:
'T
e eK T K T que está dada explícitamente por:
2 2
2 2
2 2
2 2
e e
e
e
c c s c c s
c s s c s sA E
l c c s c c s
c s s c s s
K (4.26)
Donde, c: cos(), s: sin() y cs: cos()sin().
Ejemplo. Determinar la condición deformada de la estructura mostrada y calcular las
fuerzas que transmite cada elemento. Para todos los elementos considere Ee = 29.5x106
psi y Ae = 1 in2.
Solución. La siguiente tabla muestra la conectividad nodal de cada elemento, su longitud
y ángulo director.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
133
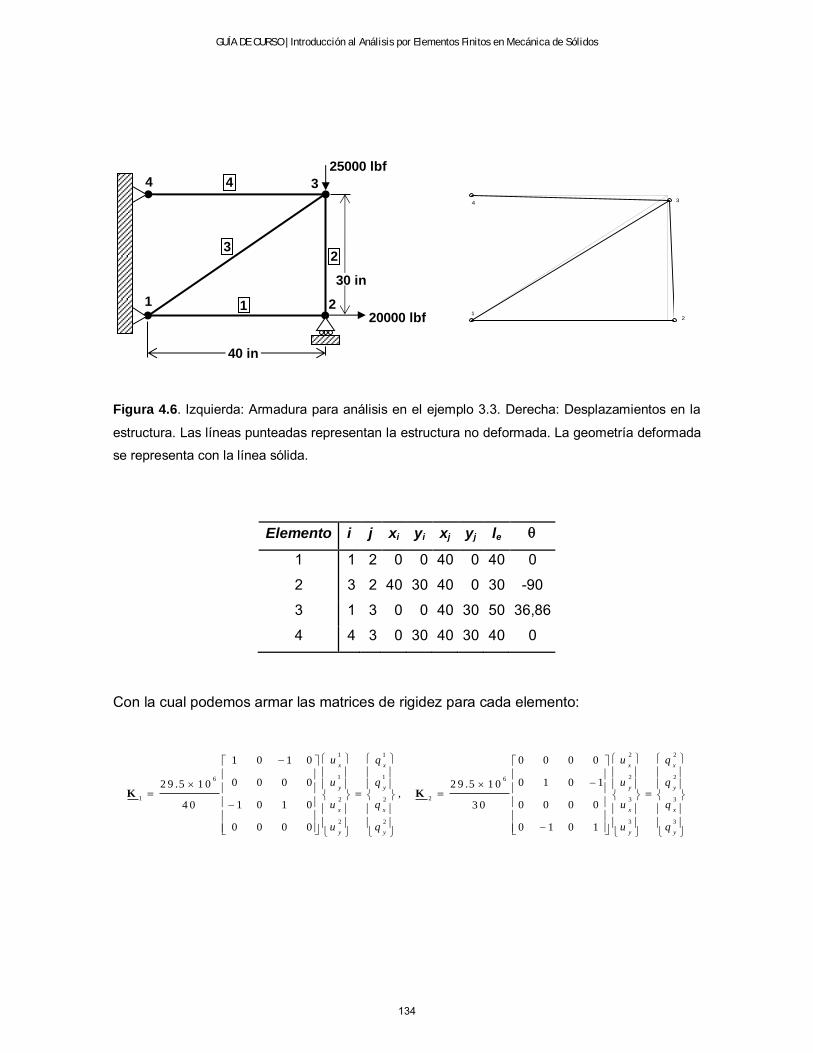
Figura 4.6. Izquierda: Armadura para análisis en el ejemplo 3.3. Derecha: Desplazamientos en la
estructura. Las líneas punteadas representan la estructura no deformada. La geometría deformada
se representa con la línea sólida.
Con la cual podemos armar las matrices de rigidez para cada elemento:
1 1 2 2
1 1 2 26 6
1 22 2 3 3
2 2 3 3
1 0 1 0 0 0 0 0
0 0 0 0 0 1 0 12 9 .5 1 0 2 9 .5 1 0,
1 0 1 0 0 0 0 04 0 3 0
0 0 0 0 0 1 0 1
x x x x
y y y y
x x x x
y y y y
u q u q
u q u q
u q u q
u q u q
K K
4
1 2
3
Elemento i j xi yi xj yj le
1 1 2 0 0 40 0 40 0
2 3 2 40 30 40 0 30 -90
3 1 3 0 0 40 30 50 36,86
4 4 3 0 30 40 30 40 0
1 2
3 4
20000 lbf
25000 lbf
4
3 2
1
40 in
30 in
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
134

1 1 4 4
1 1 4 4
3 43 3 3 3
3 3 3
1 6 1 2 1 6 1 2 1 0 1 0
1 2 9 1 2 9 0 0 0 02 9 .5 E 6 2 9 .5 E 6,
1 6 1 2 1 6 1 2 1 0 1 01 2 5 0 4 0
1 2 9 1 2 9 0 0 0 0
x x x x
y y y y
x x x x
y y y y
u q u q
u q u q
u q u q
u q u q
K K
3
Con las cuales se arma el sistema global:
1
1
2
26
3
3
4
4
2 2 .6 8 5 .7 6 1 5 0 7 .6 8 5 .7 6 0 0
5 .7 6 4 .3 2 0 0 5 .7 6 4 .3 2 0 0
1 5 0 1 5 0 0 0 0 0
0 0 0 2 0 0 2 0 0 02 9 .5 1 0
7 .6 8 5 .7 6 0 0 2 2 .6 8 5 .7 6 1 5 06 0 0
5 .7 6 4 .3 2 0 2 0 5 .7 6 2 4 .3 2 0 0
0 0 0 0 1 5 0 1 5 0
0 0 0 0 0 0 0 0
x
y
x
y
x
y
x
y
u
u
u
ux
u
u
u
u
1
1
2
2
3
3
4
4
x
y
x
y
x
y
x
y
F
F
F
F
F
F
F
F
Considerando las condiciones en los apoyos y las cargas aplicadas, se eliminan los
grados de libertad correspondientes a los desplazamientos en dirección x y y de los nodos
1 y 4 y el grado de libertad correspondiente al desplazamiento en dirección y del nodo 2.
El sistema reducido es:
2
3
3
1 5 0 0 2 0 0 0 0
2 9 .5 E 60 2 2 .6 8 5 .7 6 0
6 0 00 5 .7 6 2 4 .3 2 2 5 0 0 0
x
x
y
u
u
u
Resolviendo se obtienen los desplazamientos:
3 3 3
0 0 2 7 .1 2 1 0 0 5 .6 5 1 0 2 2 .2 5 1 0 0 0u
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
135

Las reacciones en los apoyos pueden ser calculadas reemplazando este vector en el
sistema global y realizando el producto punto K u F , con lo cual se obtienen los
siguientes valores:
1 1 2 4 41 5 8 3 3 .0 , 3 1 2 6 , 2 1 8 7 9 , 4 1 6 7 , 0
x y y x yF lb f F lb f F lb f F lb f F
Ahora los esfuerzos en cada barra pueden ser calculados mediante la expresión:
ˆ j ie
e e e
e
u uuE E
x l
(4.27)
Entonces, utilizando los valores nodales de desplazamiento hallados podemos calcular ui
y uj como:
2 2i j
i x xu u u
(4.28)
Con una expresión similar para uj. Así hallamos:
1 2 3 420000 , 21880 , 5208 , 4167psi psi psi psi
La solución en desplazamiento es presentada en la figura 4.7.
Ejemplo. Calcular los esfuerzos desarrollados en la estructura mostrada. Considere un
modulo elástico igual a 200x109 Pa.
Solución. Las siguientes tablas muestran la definición de elementos y las coordenadas
nodales.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
136
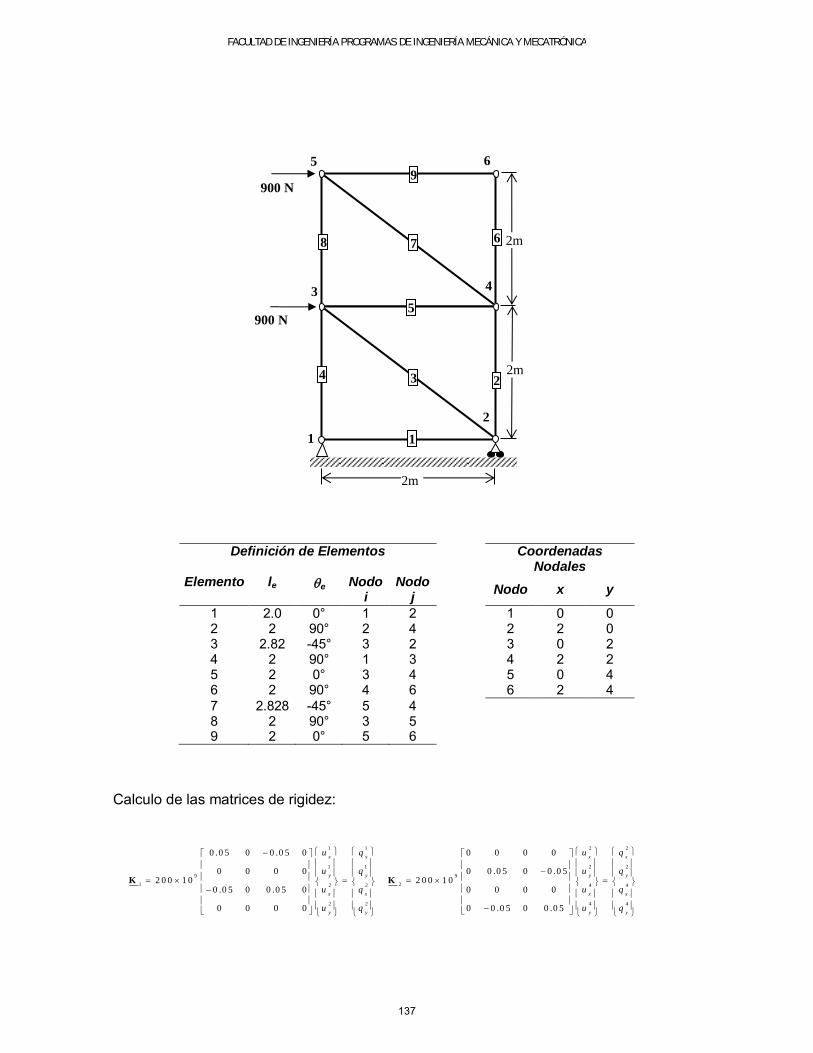
Definición de Elementos Coordenadas Nodales
Elemento le e Nodo i
Nodo j
Nodo x y
1 2.0 0° 1 2 1 0 0 2 2 90° 2 4 2 2 0 3 2.82 -45° 3 2 3 0 2 4 2 90° 1 3 4 2 2 5 2 0° 3 4 5 0 4 6 2 90° 4 6 6 2 4
7 2.828 -45° 5 4 8 2 90° 3 5 9 2 0° 5 6
Calculo de las matrices de rigidez:
1 1 2 2
1 1 2 2
9 9
1 22 2 4 4
2 2 4 4
0 .0 5 0 0 .0 5 0 0 0 0 0
0 0 0 0 0 0 .0 5 0 0 .0 52 0 0 1 0 2 0 0 1 0
0 .0 5 0 0 .0 5 0 0 0 0 0
0 0 0 0 0 0 .0 5 0 0 .0 5
x x x x
y y y y
x x x x
y y y y
u q u q
u q u q
u q u q
u q u q
K K
2m
2m
2m
900 N
900 N 9
8 7 6
5
4 3 2
1 1
2
3 4
5 6
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
137

2 2 3
2 2 3
7 9
3 43 3 1
3 3 1
2 .4 5 2 .4 5 2 .4 5 2 .4 5 0 0 0 0
2 .4 5 2 .4 5 2 .4 5 0 0 .0 5 0 0 .0 52 0 0 1 0 2 0 0 1 0
2 .4 5 2 .4 5 0 0 0 0
2 .4 5 0 0 .0 5 0 0 .0 5
x x x
y y y
x x x
y y y
u q u
u q u
u q u
u q u
K K
3
3
1
1
x
y
x
y
q
q
q
q
4 4 6 6
4 4 6 6
9 9
5 63 3 4 4
3 3 4 4
0 .0 5 0 0 .0 5 0 0 0 0 0
0 0 0 0 0 0 .0 5 0 0 .0 52 0 0 1 0 2 0 0 1 0
0 .0 5 0 0 .0 5 0 0 0 0 0
0 0 0 0 0 0 .0 5 0 0 .0 5
x x x x
y y y y
x x x x
y y y y
u q u q
u q u q
u q u q
u q u q
K K
4 6 5
4 6 5
7 9
7 85 4 4
5 4 4
2 .4 5 2 .4 5 2 .4 5 2 .4 5 0 0 0 0
2 .4 5 2 .4 5 2 .4 5 0 0 .0 5 0 0 .0 52 0 0 1 0 2 0 0 1 0
2 .4 5 2 .4 5 0 0 0 0
2 .4 5 0 0 .0 5 0 0 .0 5
x x x
y y y
x x x
y y y
u q u
u q u
u q u
u q u
K K
5
5
4
4
x
y
x
y
q
q
q
q
6 6
6 6
9
9 5 5
5 5
0 .0 5 0 0 .0 5 0
0 0 0 02 0 0 1 0
0 .0 5 0 0 .0 5 0
0 0 0 0
x x
y y
x x
y y
u q
u q
u q
u q
K
A partir de estas matrices, la matriz de rigidez global está dada por:
9
0 .0 5 0 0 .0 5 0 0 0 0 0 0 0 0 0
0 0 .0 5 0 0 0 0 .0 5 0 0 0 0 0 0
0 .0 5 0 0 .0 7 4 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 2 4 5 0 0 0 0 0 0
0 0 0 .0 2 4 5 0 .0 2 5 5 0 .0 2 4 5 0 .0 2 4 5 0 0 .0 5 0 0 0 0
0 0 0 .0 2 4 5 0 .0 2 4 5 0 .0 7 4 5 0 .0 2 4 5 0 .0 5 0 0 0 0 0
0 0 .0 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 7 5 5 0 0 0 0 .0 5 02 0 0 1 0x
K
0
0 0 0 0 0 .0 5 0 0 .0 7 4 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 2 4 5 0 0
0 0 0 0 .0 5 0 0 0 .0 2 4 5 0 .0 7 5 5 0 .0 2 4 5 0 .0 2 4 5 0 0 .0 5
0 0 0 0 0 0 0 .0 2 4 5 0 .0 2 4 5 0 .0 7 4 5 0 .0 2 4 5 0 .0 5 0
0 0 0 0 0 0 .0 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 2 5 5 0 0
0 0 0 0 0 0 0 0 0 .0 5 0 0 .0 5 0
0 0 0 0 0 0 0 0 .0 5 0 0 0 0 .0 5
Teniendo en cuenta los grados de libertad conocidos en los nodos 1 y 2 el sistema de
ecuaciones reducido es:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
138

9
0 .0 7 4 5 0 .0 2 4 5 0 .0 2 4 5 0 0 0 0 0 0
0 .0 2 4 5 0 .0 7 4 5 0 .0 2 4 5 0 .0 5 0 0 0 0 0
0 .0 2 4 5 0 .0 2 4 5 0 .0 7 5 5 0 0 0 0 .0 5 0 0
0 0 .0 5 0 0 .0 7 4 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 2 4 5 0 0
2 0 0 1 0 0 0 0 0 .0 2 4 5 0 .0 7 5 5 0 .0 2 4 5 0 .0 2 4 5 0 0 .0 5
0 0 0 0 .0 2 4 5 0 .0 2 4 5 0 .0 7 4 5 0 .0 2 4 5 0 .0 5 0
0 0 0 .
2
3
3
4
4
5
5
6
6
0
9 0 0
0
0
0
9 0 0
0 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 2 4 5 0 .0 2 5 5 0 0 0
0 0 0 0 0 0 .0 5 0 0 .0 5 0 0
0 0 0 0 0 .0 5 0 0 0 0 .0 5 0
U x
U x
U y
U x
U y
U x
U y
U x
U y
Resolviendo se obtienen los desplazamientos:
2 7 3 7 3 7 4 7 4 7
5 7 5 8 6 7 6 7
1 .8 1 0 ; 6 .3 0 1 0 ; 8 .2 8 1 0 ; 7 .2 0 1 0 ; 1 .7 8 1 0
6 .3 0 1 0 ;u 9 .5 4 1 0 ; 6 .3 0 1 0 ; 1 .7 8 1 0
x x y x y
x y x y
u u u u u
u u u
Los esfuerzos son calculados a través de la ecuación (3.45) en conjunto con la (3.46) para
calcular el desplazamiento total en los nodos. La siguiente tabla muestra los esfuerzos
desarrollados en la estructura.
Esfuerzos Desarrollados Elemento ui (x 10-7) uj (x 10-7) e (x 10-7) e (KPa)
1 0 1.8 0.9 18 2 1.8 7.41 1.8 56.1 3 6.35 1.8 -1.6 -32 4 0 6.35 3.17 63.5 5 6.35 7.41 0.53 106 6 7.41 6.54 -0.435 -8.7 7 6.37 7.41 0.367 7.35 8 6.35 6.37 0.02 0.4 9 6.37 6.54 0.17 3.4
4.4 Armaduras Espaciales
El elemento armadura tridimensional, puede tomarse como una generalización de un
elemento de armadura bidimensional. El sistema de coordenadas local para este caso
será x´ el cual esta alineado a lo largo del elemento, ya que un elemento de armadura es
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
139

un elemento sometido a dos fuerzas. Por lo tanto el vector de desplazamiento nodal en
coordenadas local es:
' '
2 1'u u u (4.29)
El vector de desplazamientos nodales en coordenadas globales es:
1 1 1 2 2 2
T
eu v w u v wa (4.30)
Encontramos nuevamente que la transformación entre las coordenadas local y global está
dado por:
'
e ea Ta (4.31)
Donde la matriz de transformación está dada por:
0 0 0
0 0 0
l m n
l m nT (4.32)
l, m y n son los cosenos directores del eje x´ local con respecto a los ejes x, y, z globales
respectivamente, dados por:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
140
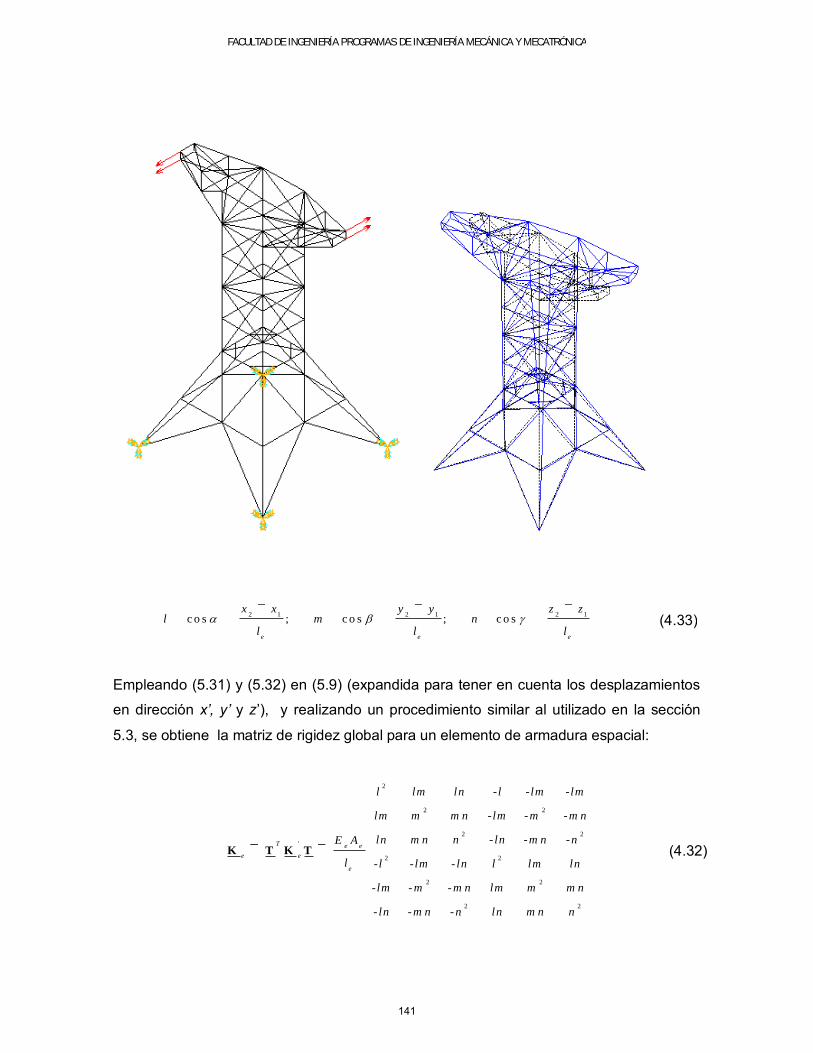
2 1 2 1 2 1c o s ; c o s ; c o s
e e e
x x y y z zl m n
l l l (4.33)
Empleando (5.31) y (5.32) en (5.9) (expandida para tener en cuenta los desplazamientos
en dirección x’, y’ y z’), y realizando un procedimiento similar al utilizado en la sección
5.3, se obtiene la matriz de rigidez global para un elemento de armadura espacial:
2
2 2
2 2
'
2 2
2 2
2 2
- - -
- - -
- -
- -
- - -
- -
T e e
e e
e
l lm ln l lm lm
lm m m n lm m m n
ln m n n - ln m n nE A
l l lm - ln l lm ln
lm m m n lm m m n
- ln m n n ln m n n
K T K T (4.32)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
141

Ejemplo. La estructura mostrada a continuación fue modelada empleando elementos de
armadura espacial (“truss 3D”). Se modela una estructura de soporte, para la cual se
analiza la acción de cargas iguales y contrarias a 750N en los nodos mostrados. Se
restringen los grados de libertad de los nodos de la base.
4.5 Barras Bajo Fuerza Axial y Flexión
El desarrollo de las ecuaciones locales de equilibrio para una barra sometida a fuerzas
axiales y de flexión, se desarrolla a partir del principio de superposición, considerando el
comportamiento total de la barra como la suma de un comportamiento como barra axial
mas su comportamiento como viga. De esta manera se tiene:
p b
e e ee e e eK a r K K a r (4.33)
Donde p
eK representa la matriz de rigidez por fuerzas axiales, dada por la expresión (4.9)
y b
eK es la matriz de rigidez por deflexión. En este caso, los vectores ae y re han sido
expandidos para contener el efecto combinado de flexión y fuerza axial:
, , , , ,
, , , , ,
Tp b
e e w i i i j j j
Tp b
e e w i i i i i i
u w u w
q v m q v m
a a a
r r r
(4.34a)
(5.34b)
Donde, u es desplazamiento axial, w desplazamiento por deflexión, θ el ángulo de giro, v
es fuerza cortante y m momento flector. Para una viga, la relación existente entre
deformaciones y deflexiones, está dada por la expresión (3.73), la cual es expresada a
través de la matriz S como:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
142

Figura 5.8. Elemento de viga. En cada nodo se definen una fuerza axial, un momento flector, una
fuerza cortante, un desplazamiento, una deflexión y un ángulo de giro.
2
2= = -z ( )
b dw x
d xε Su
(4.35)
Donde bu es el vector de desplazamiento por deflexión. Lo anterior indica que el
polinomio de interpolación para w(x) por lo menos debe poseer segunda derivada distinta
de cero. Además, de (5.34) se deduce que los ángulos de giros en los nodos deben ser
definidos, lo cual significa que los desplazamientos y primeras derivadas (ángulos de giro)
serán funciones continuas y suaves en los nodos. Lo anterior está acorde con la
experiencia física: una viga se reflecta según una curva suave y continúa. Estas
condiciones son cumplidas si se emplea un polinomio de tercer grado (cúbico):
2 3ˆ( ) ( )w x w x d cx bx ax (4.36)
El cual debe cumplir las siguientes condiciones en los nodos:
21
21
( )( 0 )0 ,
'( )'( 0 )
e
e
e
w l ww wx x l
w lw
Introduciendo estas condiciones en la ecuación (4.37) y resolviendo para los coeficientes
a, b, c y d se obtiene la siguiente expresión:
uie
i j
wi wj
Mie
Vie
Mje
Vje
le
ie
je
uje
fje
fie
q
f
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
143

1 1 2 1 3 2 4 2ˆ( ) ( )w x w x N w N N w N (4.37)
Con:
2 3 2
1 2
2 3 2
3 4
1 3 2 ; 1
3 2 ;
[ 0 , ]e
x x xN N x
le le le
x x x xN N x
le le le le
x l
(4.38)
Las cuales son las funciones de forma del elemento para cada grado de libertad. Estas
funciones son conocidas como interpoladores cúbicos de Hermite (o splines cúbicos). La
figura 4.9 presenta una grafica de estas funciones. Reemplazando estas funciones en
(4.36) se obtiene:
2
2ˆ ˆ= ( ) -z ( )
dw x w x
d xε S
(4.39)
Por otra lado, la Ley de Hooke se reduce en este caso a su forma tradicional:
2 2 2 2
1 2 3 4
2 2 2 2= = =
b b b b bd N d N d N d Nz E
d x d x d x d xσ Dε D S N u D Bu a
(4.40)
Reemplazando B y D en (5.2) en integrando se obtiene la matriz de rigidez para un
elemento de viga de Euler:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
144

2 2
3
2 2
6 3 6 3
3 2 32
6 3 6 3
3 3 2
e e
b e e e ee e
e
e ee
e e e e
l l
l l l lE I
l ll
l l l l
K (4.41)
Las fuerzas nodales equivalentes generadas por una fuerza distribuida constante es
calculada como:
Figura 4.9. Funciones de forma. Se observa como las funciones de forma para los
desplazamientos nodales (N1 y N3) se hacen igual a 1 en los nodos respectivos. Las funciones de
forma N2 y N4 son iguales a cero en ambos nodos, pero su derivada en estos es igual a 1.
6
61 2
T ee
e
lf ld
l
N b
(4.42)
En este caso, la carga distribuida es reemplazada por una fuerza cortante en cada nodo
(de magnitud igual a la mitad de la resultante de esta fuerza) y momentos flectores
(generados por esta resultante en cada nodo). Por otra parte, el vector de fuerzas nodales
equivalentes internas está dado por (4.4):
0.2 0.4 0.6 0.8 1
x
Le
0.2
0.4
0.6
0.8
1
N
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
145

i j
e
i
e
T T T i
i j ei j
j
e
j
v
md d d
v
m
e
q N t N t N t
(4.43)
Entonces, el vector de fuerzas nodales total está dado por:
6
61 2
e
i
e
e ie
e e e
j
e
e j
v
l mfl
v
l m
f q
(4.44)
Con lo cual se completa el sistema de ecuaciones para un elemento de viga. Colocando
estos resultados en la expresión (4.33) y utilizando los resultados encontrados para un
elemento de barra con carga axial (expandiendo este último sistema), se llega finalmente
a la matriz de rigidez y al sistema de ecuaciones para un elemento de barra con carga
axial y transversal:
2 2
3
2 2
0 0 0 0 6
0 6 3 0 6 3 6
0 3 2 0 32
0 0 0 0 61 2
0 6 3 0 6 3 6
0 3 0 3 2
e
i
e
e e i
e
e e e e eie e e
e
e i
e
e e i
e
e e e e ei
e
fu
l l qw
l l l l q lE I l
fl u
l l qw
l l l l q l
K
e
i
e
i
e
i
e
i
e
i
e
i
q
v
m
q
v
m
(4.45)
Con: 22
e e eA l I . Se ha empleado la letra q para representar fuerzas de flexión
distribuidas.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
146
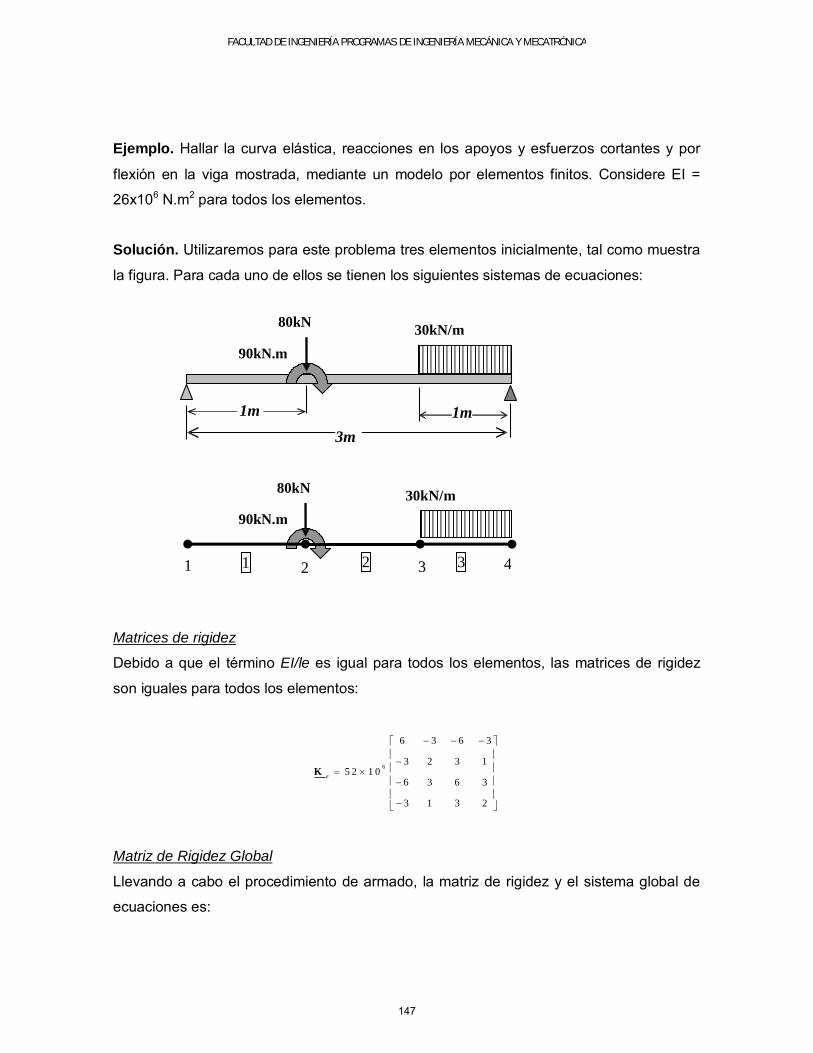
Ejemplo. Hallar la curva elástica, reacciones en los apoyos y esfuerzos cortantes y por
flexión en la viga mostrada, mediante un modelo por elementos finitos. Considere EI =
26x106 N.m2 para todos los elementos.
Solución. Utilizaremos para este problema tres elementos inicialmente, tal como muestra
la figura. Para cada uno de ellos se tienen los siguientes sistemas de ecuaciones:
Matrices de rigidez
Debido a que el término EI/le es igual para todos los elementos, las matrices de rigidez
son iguales para todos los elementos:
6
6 3 6 3
3 2 3 15 2 1 0
6 3 6 3
3 1 3 2
e
K
Matriz de Rigidez Global
Llevando a cabo el procedimiento de armado, la matriz de rigidez y el sistema global de
ecuaciones es:
30k N/m
90k N . m
1m
3m
80k N
30k N/m
90k N . m
1
80k N
2
3 4
1 2 3
1m
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
147
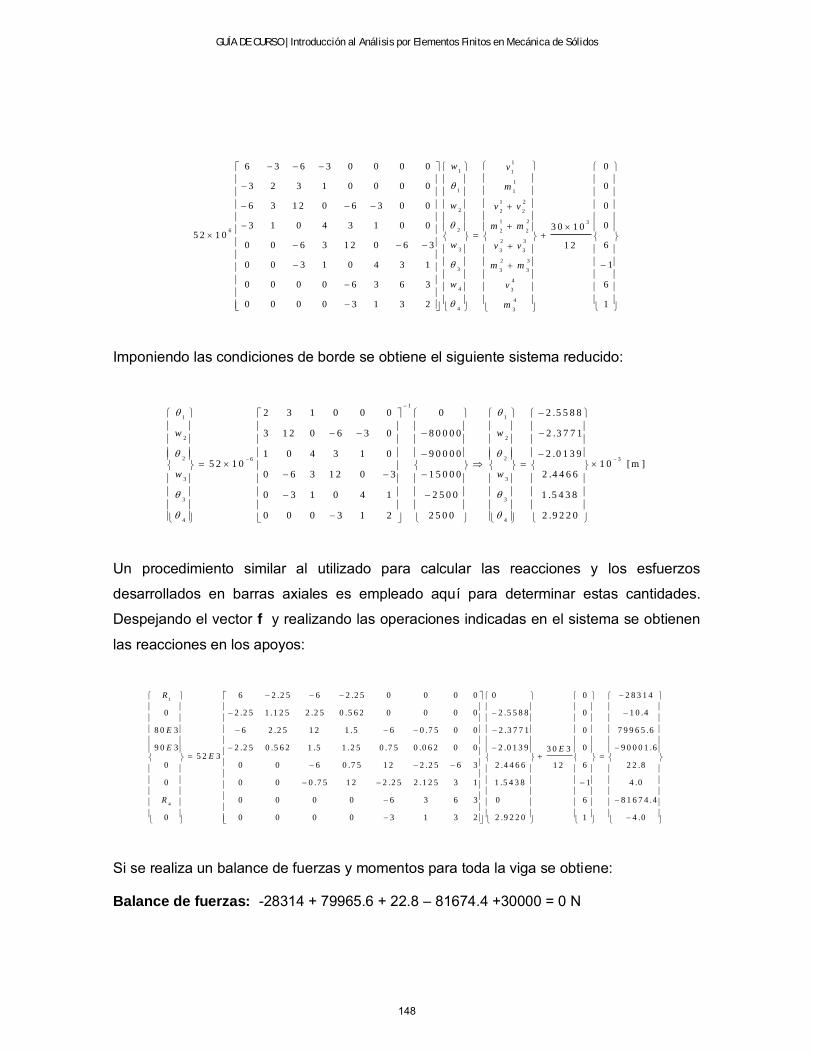
1
1 1
1
1 1
1 2
2 2 2
1 2
26 2 2
2 3
3 3 3
2 3
3 3 3
4
4 3
4
4 3
6 3 6 3 0 0 0 0
3 2 3 1 0 0 0 0
6 3 1 2 0 6 3 0 0
3 1 0 4 3 1 0 05 2 1 0
0 0 6 3 1 2 0 6 3
0 0 3 1 0 4 3 1
0 0 0 0 6 3 6 3
0 0 0 0 3 1 3 2
w v
m
w v v
m m
w v v
m m
w v
m
3
0
0
0
03 0 1 0
61 2
1
6
1
Imponiendo las condiciones de borde se obtiene el siguiente sistema reducido:
1
1 1
2 2
2 26
3 3
3 3
4 4
2 3 1 0 0 0 0 2 .5 5 8 8
3 1 2 0 6 3 0 8 0 0 0 0 2 .3 7
1 0 4 3 1 0 9 0 0 0 05 2 1 0
0 6 3 1 2 0 3 1 5 0 0 0
0 3 1 0 4 1 2 5 0 0
0 0 0 3 1 2 2 5 0 0
w w
w w
3
7 1
2 .0 1 3 91 0 [m ]
2 .4 4 6 6
1 .5 4 3 8
2 .9 2 2 0
Un procedimiento similar al utilizado para calcular las reacciones y los esfuerzos
desarrollados en barras axiales es empleado aquí para determinar estas cantidades.
Despejando el vector f y realizando las operaciones indicadas en el sistema se obtienen
las reacciones en los apoyos:
1
4
6 2 .2 5 6 2 .2 5 0 0 0 0
0 2 .2 5 1 .1 2 5 2 .2 5 0 .5 6 2 0 0 0 0
8 0 3 6 2 .2 5 1 2 1 .5 6 0 .7 5 0 0
9 0 3 2 .2 5 0 .5 6 2 1 .5 1 .2 5 0 .7 5 0 .0 6 2 0 05 2 3
0 0 0 6 0 .7 5 1 2 2 .2 5 6 3
0 0 0 0 .7 5 1 2 2 .2 5 2 .1 2 5 3 1
0 0 0 0 6 3 6 3
0 0 0 0 0 3 1 3 2
R
E
EE
R
0 0 2 8 3 1 4
2 .5 5 8 8 0 1 0 .4
2 .3 7 7 1 0 7 9 9 6 5 .6
2 .0 1 3 9 0 9 0 0 0 1 .63 0 3
2 .4 4 6 6 6 2 2 .81 2
1 .5 4 3 8 1 4 .0
0 6 8 1 6 7 4 .4
2 .9 2 2 0 1 4 .0
E
Si se realiza un balance de fuerzas y momentos para toda la viga se obtiene:
Balance de fuerzas: -28314 + 79965.6 + 22.8 – 81674.4 +30000 = 0 N
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
148

Balance de momentos (nodo 1): -10.4-79965.6*1-90001.6-22.8*2+4.0-30000*2.5-
4.0+81674.4*3 = 0 N
Lo anterior demuestra el balance de fuerzas externas en el modelo. Se observa que
existen errores numéricos en el cálculo de las reacciones, ya que por ejemplo, la carga
aplicada de 80000 N en el nodo 2 es calculada como 79965.6 N en el procedimiento
anterior. Lo mismo puede observarse en el cálculo de los momentos en los nodos 3 y 4.
Esta diferencia proviene de errores numéricos por truncamiento al trabajar con numero
finito de cifras decimales en el computador. El cálculo de esfuerzos requiere aplicar un
procedimiento similar al empleado en elementos de barra. Consideremos el cálculo de
deformaciones unitarias en el elemento 3. Para este elemento, el polinomio de
interpolación es:
3 3 3
1 2 3 4ˆ ( ) ( 2 .4 4 6 1 0 ) (1 .5 4 3 8 1 0 ) (0 ) ( 2 .9 9 2 1 0 )w x N N N N
(4.46)
Con las funciones de forma dadas en (4.39). La deformación unitaria por flexión está dada
por (5.40):
22 2 2
3 31 2 4
2 2 2 2
2 .4 4 6
1 .5 4 3 81 1 0
0
2 .9 9 2
b d Nd N d N d N
d x d x d x d x
ε Ba
(4.47)
Con:
22 2
31 2
2 2 2 2 2
2
4
2
6 2 61 2 ; 3 2 ; 1 2
23 1
e e e e e e
e e
d Nd N d Nx x x x x
d x l l d x l l d x l l
d N x
d x l l
(4.48)
Lo cual indica una variación cuadrática de la deformación unitaria a lo largo del elemento.
La figura 4.10 muestra gráficos de deflexión y de ángulos de giro obtenidos.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
149
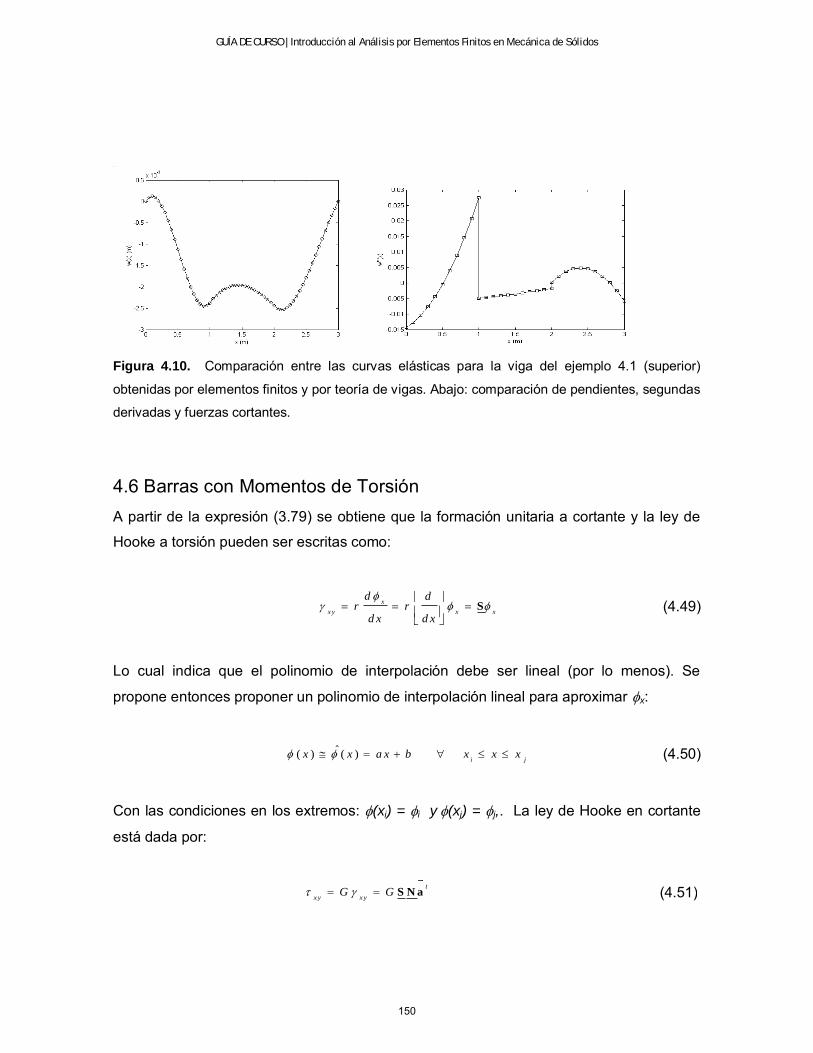
Figura 4.10. Comparación entre las curvas elásticas para la viga del ejemplo 4.1 (superior)
obtenidas por elementos finitos y por teoría de vigas. Abajo: comparación de pendientes, segundas
derivadas y fuerzas cortantes.
4.6 Barras con Momentos de Torsión
A partir de la expresión (3.79) se obtiene que la formación unitaria a cortante y la ley de
Hooke a torsión pueden ser escritas como:
x
x y x x
d dr r
d x d x
S (4.49)
Lo cual indica que el polinomio de interpolación debe ser lineal (por lo menos). Se
propone entonces proponer un polinomio de interpolación lineal para aproximar x:
ˆ( ) ( )i j
x x a x b x x x (4.50)
Con las condiciones en los extremos: (xi) = i y (xj) = j,. La ley de Hooke en cortante
está dada por:
t
x y x yG G S N a (4.51)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
150

Donde se han empleado las funciones de forma dadas en (5.6) y t
i j a es el vector
de ángulos de giro nodal. Observamos que el problema de torsión presente ecuaciones
con la misma estructura matemática del problema de barras con carga axial. Sí en las
ecuaciones de ese problema se reemplaza G por E, J por A, x por ux, tx por f y T por A,
se obtiene la solución para el problema de torsión en barras. Por lo que procedimiento
empleado para desarrollar la formulación por elementos finitos en el caso de barras
sometidas a momentos de torsión es igual al de una barra sometida a carga axial, siempre
y cuando se realicen, en esta ultima, las sustituciones de variables presentada. De esta
manera, las ecuaciones de elemento para el caso de barras con momentos de torsión
son:
1 1 1
1 1 12
e
i ie e x e
e
j je
qG J t l
ql
(4.52)
Donde tx es un torque constante distribuido a lo largo de la barra. Al igual que para los
elementos de barra, el modelamiento de ejes con sección transversal, modulo de rigidez ó
momentos distribuidos variables, deberán ser analizados desarrollando una formulación
por elementos finitos que tenga en cuenta esta variación a través de funciones de
aproximación adecuadas.
4.7 Marcos Planos
Los marcos planos son estructuras reticulares 2D cuyos componentes transmiten cargas
de flexión y axiales. Se construyen a partir de elementos unidimensionales generalizados
orientados arbitrariamente en el plano. La matriz de rigidez para un elemento de este tipo
se obtiene transformando la matriz de rigidez (4.43) a traves de una matriz de
transformación T, tal como se realizó en la determinación de la matriz de rigidez para un
elemento de armadura plana. Por lo tanto un elemento de marco plano contiene como
casos especiales a todos los elementos unidimensionales planos vistos hasta el
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
151
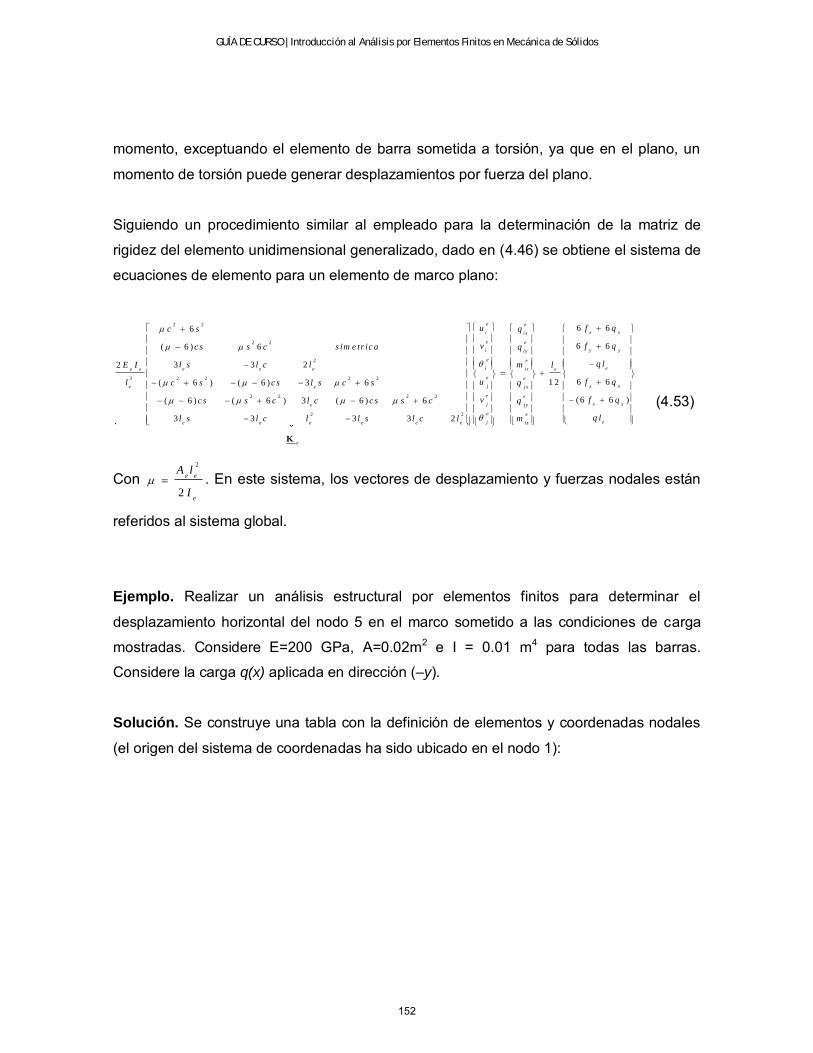
momento, exceptuando el elemento de barra sometida a torsión, ya que en el plano, un
momento de torsión puede generar desplazamientos por fuerza del plano.
Siguiendo un procedimiento similar al empleado para la determinación de la matriz de
rigidez del elemento unidimensional generalizado, dado en (4.46) se obtiene el sistema de
ecuaciones de elemento para un elemento de marco plano:
2 2
2 2
2
3 2 2 2 2
2 2 2 2
2 2
6
( 6 ) 6
3 3 22
( 6 ) ( 6 ) 3 6
( 6 ) ( 6 ) 3 ( 6 ) 6
3 3 3 3 2
e
i
e
i
e e ee e
e e
e
e e e e e e
e
uc s
vc s s c s im e tr ic a
l s l c lE I
l c s c s l s c s
c s s c l c c s s c
l s l c l l s l c l
K
6 6
6 6
6 61 2
( 6 6 )
e
x xix
e
y yiy
e e
ei iz e
e e
x xj jx
e e
x xj jy
e e
ej iz
f qq
f qq
q lm l
f qu q
f qv q
q lm
(4.53)
Con
2
2
e e
e
A l
I . En este sistema, los vectores de desplazamiento y fuerzas nodales están
referidos al sistema global.
Ejemplo. Realizar un análisis estructural por elementos finitos para determinar el
desplazamiento horizontal del nodo 5 en el marco sometido a las condiciones de carga
mostradas. Considere E=200 GPa, A=0.02m2 e I = 0.01 m4 para todas las barras.
Considere la carga q(x) aplicada en dirección (–y).
Solución. Se construye una tabla con la definición de elementos y coordenadas nodales
(el origen del sistema de coordenadas ha sido ubicado en el nodo 1):
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
152
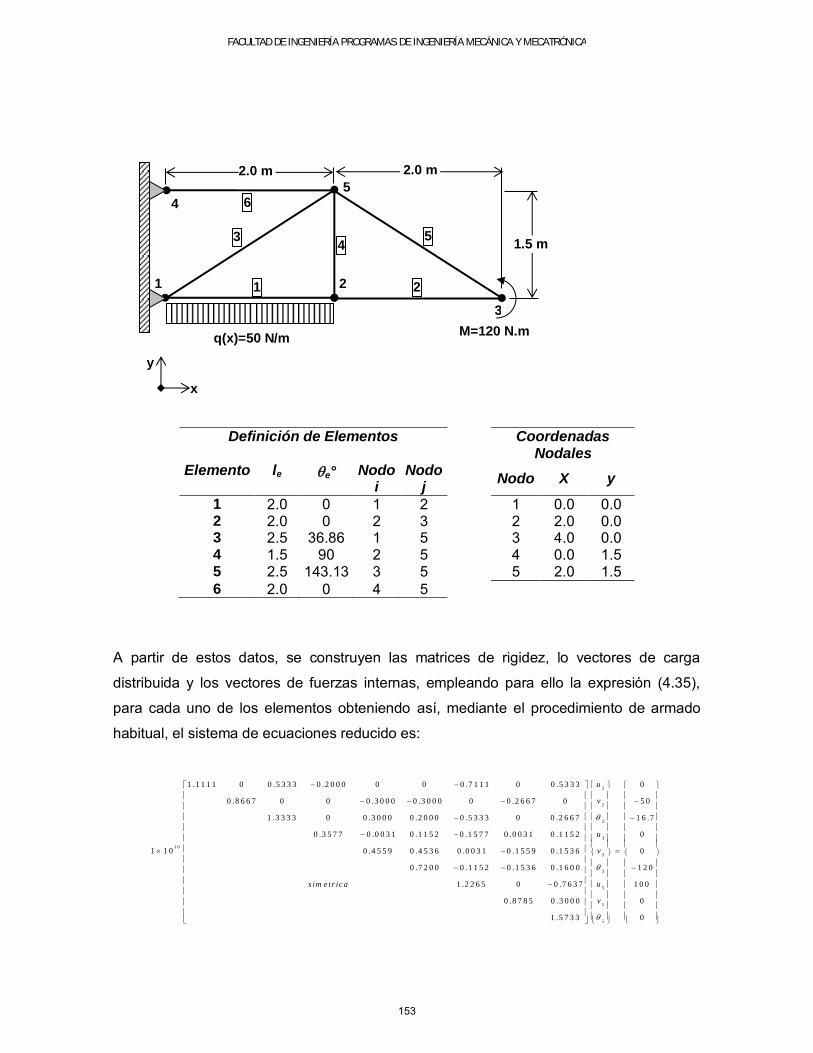
Definición de Elementos Coordenadas Nodales
Elemento le e° Nodo i
Nodo j
Nodo X y
1 2.0 0 1 2 1 0.0 0.0 2 2.0 0 2 3 2 2.0 0.0 3 2.5 36.86 1 5 3 4.0 0.0 4 1.5 90 2 5 4 0.0 1.5 5 2.5 143.13 3 5 5 2.0 1.5
6 2.0 0 4 5
A partir de estos datos, se construyen las matrices de rigidez, lo vectores de carga
distribuida y los vectores de fuerzas internas, empleando para ello la expresión (4.35),
para cada uno de los elementos obteniendo así, mediante el procedimiento de armado
habitual, el sistema de ecuaciones reducido es:
1 0
1 .1 1 1 1 0 0 .5 3 3 3 0 .2 0 0 0 0 0 0 .7 1 1 1 0 0 .5 3 3 3
0 .8 6 6 7 0 0 0 .3 0 0 0 0 .3 0 0 0 0 0 .2 6 6 7 0
1 .3 3 3 3 0 0 .3 0 0 0 0 .2 0 0 0 0 .5 3 3 3 0 0 .2 6 6 7
0 .3 5 7 7 0 .0 0 3 1 0 .1 1 5 2 0 .1 5 7 7 0 .0 0 3 1 0 .1 1 5 2
1 1 0 0 .4 5 5 9 0 .4 5 3 6 0 .0 0 3 1 0 .1 5 5 9 0 .1 5 3 6
0 .7 2 0 0 0 .1 1 5 2 0 .1 5 3 6 0 .1 6 0
2
2
2
3
3
3
5
5
5
0
5 0
1 6 .7
0
0
0 1 2 0
1 .2 2 6 5 0 0 .7 6 3 7 1 0 0
0 .8 7 8 5 0 .3 0 0 0 0
1 .5 7 3 3 0
u
v
u
v
us im e tr ic a
v
4 5
6
1 2
3
5
4
y
x
q(x)=50 N/m M=120 N.m
2.0 m 2.0 m
1.5 m
1 2
3
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
153
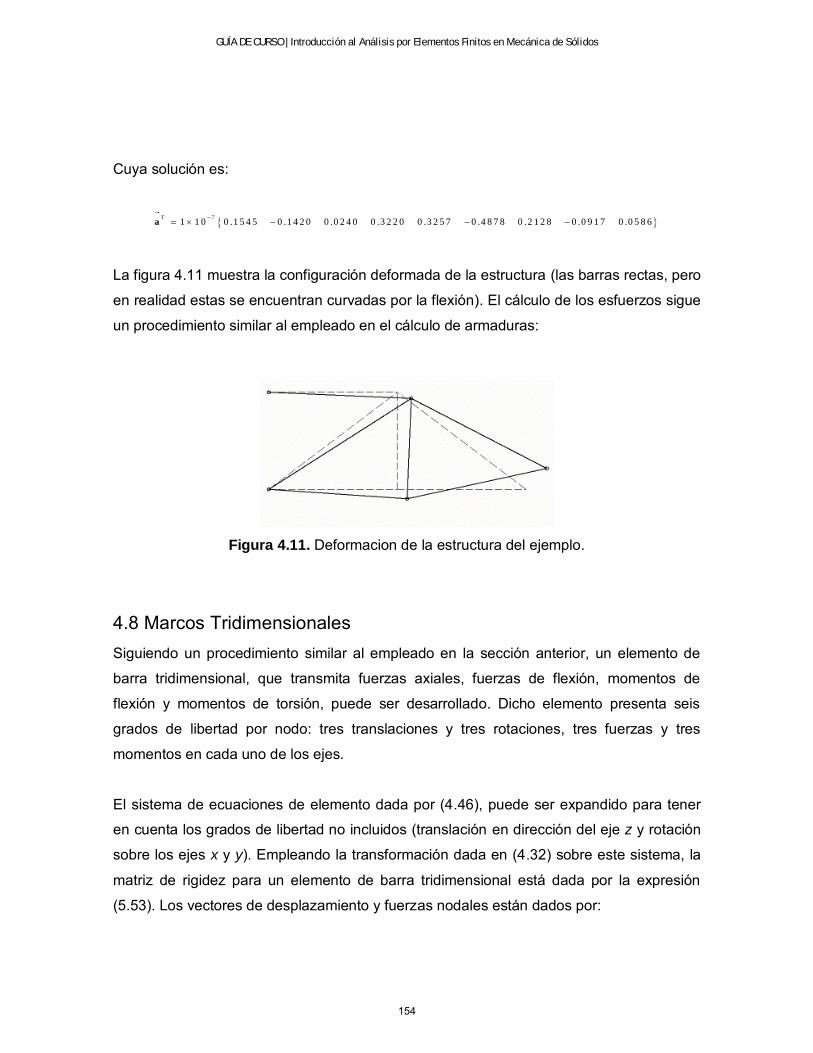
Cuya solución es:
7
1 1 0 0 .1 5 4 5 0 .1 4 2 0 0 .0 2 4 0 0 .3 2 2 0 0 .3 2 5 7 0 .4 8 7 8 0 .2 1 2 8 0 .0 9 1 7 0 .0 5 8 6T a
La figura 4.11 muestra la configuración deformada de la estructura (las barras rectas, pero
en realidad estas se encuentran curvadas por la flexión). El cálculo de los esfuerzos sigue
un procedimiento similar al empleado en el cálculo de armaduras:
Figura 4.11. Deformacion de la estructura del ejemplo.
4.8 Marcos Tridimensionales
Siguiendo un procedimiento similar al empleado en la sección anterior, un elemento de
barra tridimensional, que transmita fuerzas axiales, fuerzas de flexión, momentos de
flexión y momentos de torsión, puede ser desarrollado. Dicho elemento presenta seis
grados de libertad por nodo: tres translaciones y tres rotaciones, tres fuerzas y tres
momentos en cada uno de los ejes.
El sistema de ecuaciones de elemento dada por (4.46), puede ser expandido para tener
en cuenta los grados de libertad no incluidos (translación en dirección del eje z y rotación
sobre los ejes x y y). Empleando la transformación dada en (4.32) sobre este sistema, la
matriz de rigidez para un elemento de barra tridimensional está dada por la expresión
(5.53). Los vectores de desplazamiento y fuerzas nodales están dados por:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
154
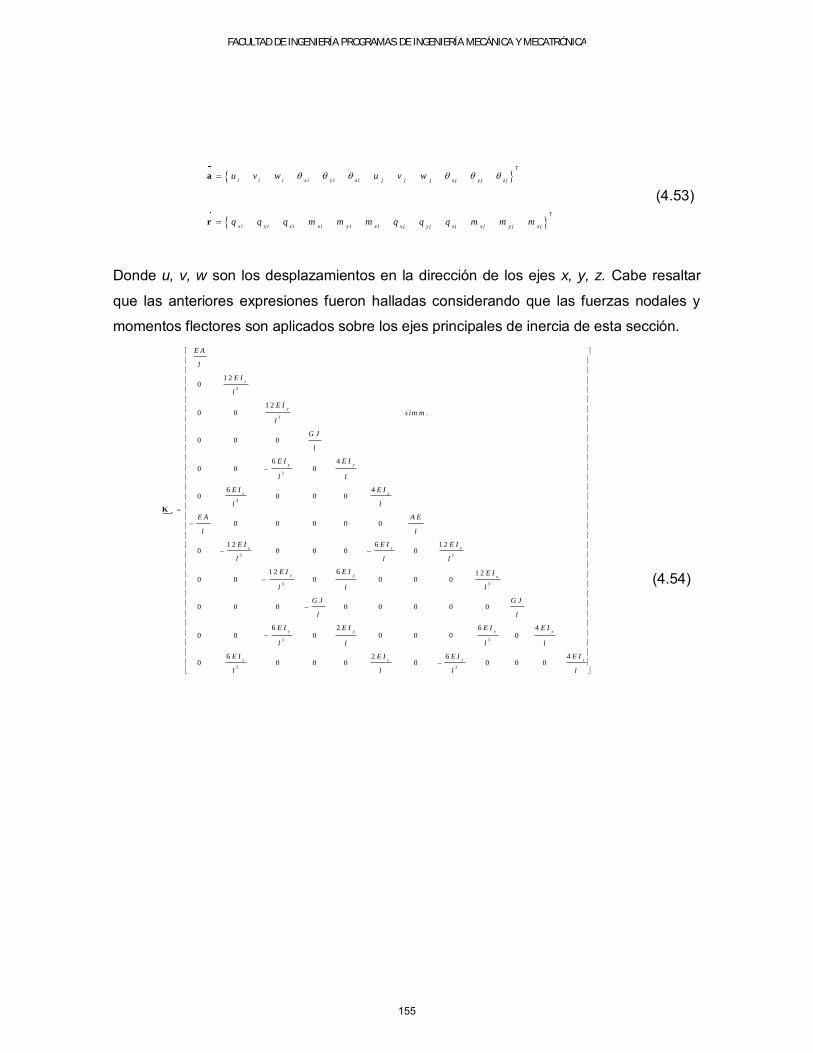
T
i i i x i y i z i j j j x j y j z j
T
x i y i z i x i y i z i x j y j z j x j y j z j
u v w u v w
q q q m m m q q q m m m
a
r
(4.53)
Donde u, v, w son los desplazamientos en la dirección de los ejes x, y, z. Cabe resaltar
que las anteriores expresiones fueron halladas considerando que las fuerzas nodales y
momentos flectores son aplicados sobre los ejes principales de inercia de esta sección.
3
3
3
3
3 3
3 3
3 3
3 3
1 20
1 20 0 .
0 0 0
6 40 0 0
6 40 0 0 0
0 0 0 0 0
1 2 6 1 20 0 0 0 0
1 2 6 1 20 0 0 0 0 0
0 0 0 0 0 0 0 0
6 2 6 40 0 0 0 0 0 0
6 2 6 40 0 0 0 0 0 0 0
z
y
y y
z z
e
z z z
y y z
y y y y
z z z
E A
l
E I
l
E Is im m
l
G J
l
E I E I
l l
E I E I
l l
E A A E
l l
E I E I E I
l l l
E I E I E I
l l l
G J G J
l l
E I E I E I E I
l l l l
E I E I E I
l l l
K
zE I
l
(4.54)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
155

Capitulo 5.
Elasticidad Plana
5.1 Introducción
Los problemas bidimensionales en mecánica de estructuras se presentan en cuerpos
continuos tridimensionales como un caso especial del comportamiento de estos cuerpos,
que permite reducir la dimensionalidad del problema, lo cual conlleva a formulaciones más
sencillas y a la obtención, en algunos casos sencillos, de soluciones analíticas prácticas
en ingeniería. Estas hipótesis simplificadoras se generan a partir del estudio del campo de
desplazamiento o de deformación del cuerpo. De allí aparecen los conceptos de esfuerzo
plano, deformación plana y deformación axisimétrica, siendo esta última un caso especial
de deformación plana. En estos problemas, el campo de desplazamiento viene expresado
unívocamente en función de los desplazamientos u y v en las direcciones de los ejes
cartesianos ortogonales x y y, respectivamente (en el caso de deformación axisimetricas,
lo ejes polares r y z respectivamente). Además, las únicas tensiones y deformaciones que
se han de considerar en ambos casos son las tres componentes en el plano xy (rz). en el
caso de esfuerzo plano, las otras tres componentes de esfuerzo son nulas por definición
y, por consiguiente, no contribuyen a la energía elástica interna del cuerpo. En la
deformación plana, la tensión en dirección perpendicular al plano xy no es nula. Sin
embargo, la deformación en dicha dirección es nula, y por tanto dicho esfuerzo tampoco
contribuyen a la energía elástica interna, pero existe y puede ser evaluada.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
157
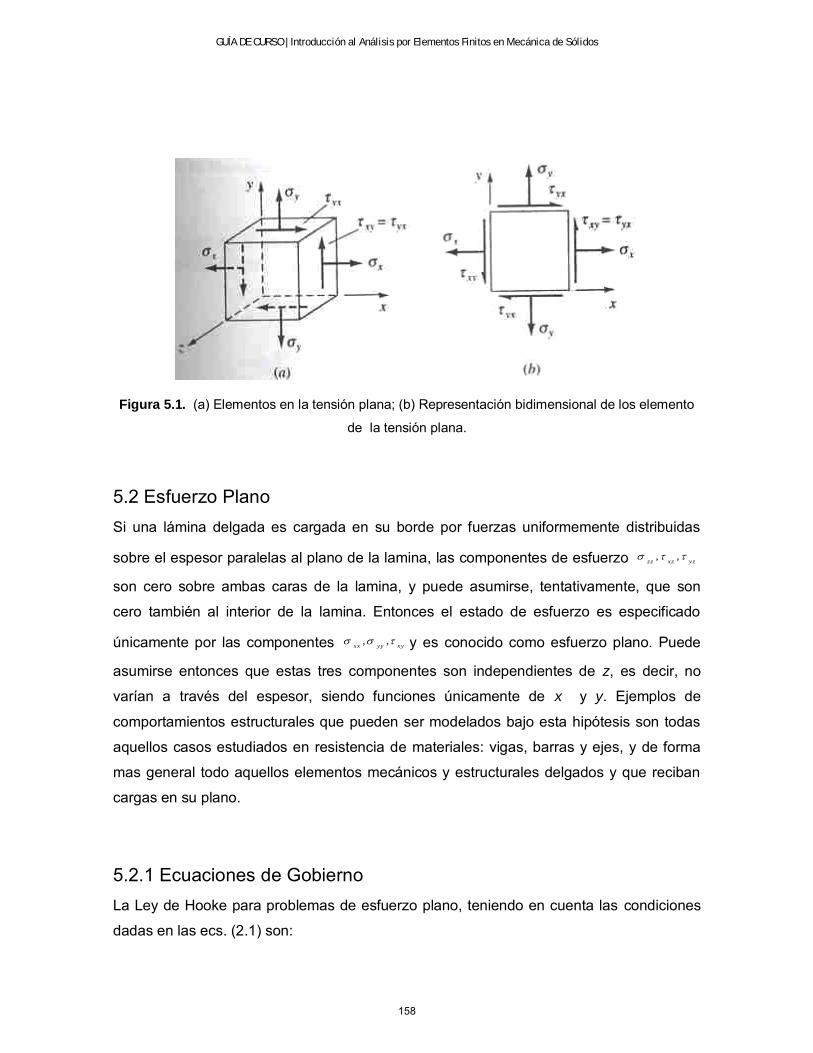
Figura 5.1. (a) Elementos en la tensión plana; (b) Representación bidimensional de los elemento
de la tensión plana.
5.2 Esfuerzo Plano
Si una lámina delgada es cargada en su borde por fuerzas uniformemente distribuidas
sobre el espesor paralelas al plano de la lamina, las componentes de esfuerzo , ,zz xz yz
son cero sobre ambas caras de la lamina, y puede asumirse, tentativamente, que son
cero también al interior de la lamina. Entonces el estado de esfuerzo es especificado
únicamente por las componentes , ,xx yy xy
y es conocido como esfuerzo plano. Puede
asumirse entonces que estas tres componentes son independientes de z, es decir, no
varían a través del espesor, siendo funciones únicamente de x y y. Ejemplos de
comportamientos estructurales que pueden ser modelados bajo esta hipótesis son todas
aquellos casos estudiados en resistencia de materiales: vigas, barras y ejes, y de forma
mas general todo aquellos elementos mecánicos y estructurales delgados y que reciban
cargas en su plano.
5.2.1 Ecuaciones de Gobierno
La Ley de Hooke para problemas de esfuerzo plano, teniendo en cuenta las condiciones
dadas en las ecs. (2.1) son:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
158

1 1
, ,x x x x y y y y y y x x z z x x y y
x y
x y
vv v
E E E
G
(5.1)
Resolviendo para los esfuerzos se tienen las siguientes relaciones:
2 2
2 2
1 1
1 1
x x x x y y
y y x x y y
x y x y
E E v
v v
E v E
v v
G
(5.2)
Debe tenerse en cuenta que la hipótesis de esfuerzo plano considera despreciable el
esfuerzo zz en comparación con los esfuerzos xx y yy, el cual viene dado por la
expresión:
z z x x y y (5.3)
Ya que la hipótesis de esfuerzo plano supone igualmente que los desplazamientos, los
esfuerzos (y por tanto las deformaciones) son solo funciones de las coordenadas x y y del
plano que contiene al cuerpo, las relaciones deformación – desplazamiento se reducen a:
, ,
x x y y x y
u v u v
x y y x
(5.4)
Igualmente, las ecuaciones de equilibrio se reducen a:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
159

2
2
2
2
x yx x
x
x y y y
y
uf
x y t
vf
x y t
(5.5)
Reemplazando las ecuaciones (3.4) en (3.3) y estas en (3.5) se obtiene:
2 2 2 2 2
2 2 2 2 2
2 2 2 2 2
2 2 2 2 2
1 2 (1 ) 1 2 (1 )
2 (1 ) 1 2 (1 ) 1
x
y
E u E u E v u E v uf
v x v y v x y v x y t
E v E v u E u E v vf
v x v x v x y v x y t
(5.6)
Las cuales representan las ecuaciones de gobierno del problema de esfuerzo plano, con
las condiciones de borde e iniciales:
0 0
0 0
0 0
( , , ) , ( , , ) , [ 0 , ]
( , , ) , [ 0 , ]
( , , ) , ( , , ) , 0
( , , ) , ( , , ) , 0
u
t
v
a
u x y t u v x y t v x y t t
x y t n x y t t
u x y t u v x y t v x y t
u x y t u v x y t v x y t
σ
(5.7)
2.2 Formulación por Elementos Finitos
A partir de las expresiones dadas en 5.2.1, los vectores de deformación y de esfuerzo
están dados por:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
160
juangabriel
Texto escrito a máquina
5.
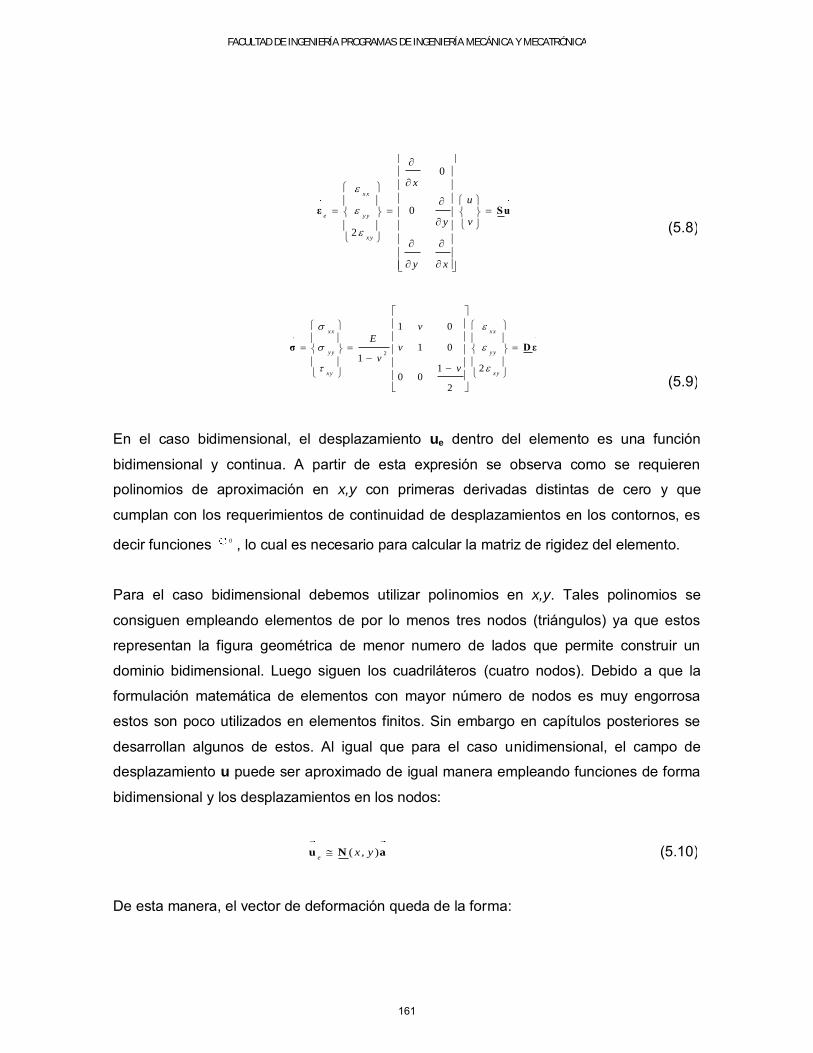
0
0
2
x x
e y y
x y
x
u
vy
y x
ε Su
(5.8)
2
1 0
1 01
1 20 0
2
x x x x
y y y y
x y x y
v
Ev
vv
σ Dε
(5.9)
En el caso bidimensional, el desplazamiento ue dentro del elemento es una función
bidimensional y continua. A partir de esta expresión se observa como se requieren
polinomios de aproximación en x,y con primeras derivadas distintas de cero y que
cumplan con los requerimientos de continuidad de desplazamientos en los contornos, es
decir funciones 0
, lo cual es necesario para calcular la matriz de rigidez del elemento.
Para el caso bidimensional debemos utilizar polinomios en x,y. Tales polinomios se
consiguen empleando elementos de por lo menos tres nodos (triángulos) ya que estos
representan la figura geométrica de menor numero de lados que permite construir un
dominio bidimensional. Luego siguen los cuadriláteros (cuatro nodos). Debido a que la
formulación matemática de elementos con mayor número de nodos es muy engorrosa
estos son poco utilizados en elementos finitos. Sin embargo en capítulos posteriores se
desarrollan algunos de estos. Al igual que para el caso unidimensional, el campo de
desplazamiento u puede ser aproximado de igual manera empleando funciones de forma
bidimensional y los desplazamientos en los nodos:
( , )e
x yu N a (5.10)
De esta manera, el vector de deformación queda de la forma:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
161

e e e ε SNa Ba (5.11)
La matriz B depende del tipo de elemento empleado y será presentada en las próximas
secciones. Por otra parte, el vector de esfuerzo está dado por:
e σ Dε DSNa (5.12)
La matriz elástica D está dada por la expresión (5.3). A partir de las expresiones
anteriormente dadas, la matriz de rigidez y los vectores de fuerzas nodales equivalentes
pueden ser calculadas a partir de las expresiones dadas. A continuación se desarrollan
las matrices de rigidez para el elemento triangular de deformación constante (TDC) y para
un elemento cuadrilátero de cuatro nodos.
6.2.2.1 Elementos triangulares. Los polinomios bidimensionales en x y y que se pueden
interpolar empleando tres puntos8 son de la forma general:
( , )
( , )
u x y a b x c y
v x y d e x fy
(5.13)
8 Recordemos que un polinomio 1D de grado n puede ser construido si se conocen sus valores en n+1 puntos. Así para construir una línea recta (polinomio de primer grado) se deben conocer necesariamente dos puntos por donde pase. Para un polinomio cuadrático (grado dos) se deben conocer tres puntos, etc. Esto es extensible para polinomios 2D y 3D. Lo
anterior se deduce del número de coeficientes que presente el polinomio.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
162

Figura 5.2. Elemento tipo triangulo “CST” tres nodos y dos grados de libertad por nodo. La
identificación de los nodos se realiza en contra de las manecillas del reloj, de tal manera que el
vector normal al elemento siempre sale del plano del papel.
Los coeficientes de estos polinomios pueden ser hallados teniendo en cuenta las
siguientes condiciones de borde:
( , ) , ( , ) , ( , )
( , ) , ( , ) , ( , )
i i i j j j k k k
i i i j j j k k k
u x y u u x y u u x y u
v x y v v x y v v x y v
(5.14)
Las cuales son reemplazadas en la ecuación (5.14) para hallar los coeficientes
desconocidos. De esta manera el polinomio de interpolación para u(x,y) (agrupando los
términos que contengan ui, uj y uk) es:
ˆ( , ) ( , )
ˆ( , ) ( , )
i i j j k k
i i j j k k
u x y u x y N u N u N u
v x y v x y N v N v N v
(5.15)
En forma compacta:
Fyi
uj
i
j
k
vj
uj
vj
uk
vk
Fxi
Fxj
Fxk
Fyj
Fyk
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
163

0 0 0
0 0 0
i
i
j
i j k
j
i j k
k
k
u
v
N N Nu u
N N Nv v
u
v
u N a
(5.16)
Con las funciones de forma definidas como:
1 1
2 2
1 1
2 2
1 1
2 2
i j k k j j k k j
e e
j k i i k k i i k
e e
k i j j i i j j i
e e
N x y x y y y x x x y A B x C yA A
N x y x y y y x x x y D E x F yA A
N x y x y y y x x x y G H x J yA A
(5.17)
Donde Ae es el área del elemento. Observe que estas funciones son constantes al interior
del elemento y por lo tanto las deformaciones y esfuerzos en este elemento son
constantes. De allí su nombre de triangulo de deformación constante (TDC). Para este
elemento, la matriz B está dada por:
0
0 0 00 0 0 1
0 0 0 00 0 0 2
i j k
i j k e
xB E H
N N NC F J
N N Ny AC B F E J H
y x
B S N
(5.18)
Ahora, la matriz de rigidez de este elemento está dada por:
/ 2
/ 22
e
e
t
T Te e
e
et
t Ed xd y d z
A
K B D B B D B
(5.19)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
164

Donde se ha considerado que la matriz T
B D B es constante. De forma explicita, esta
matriz está dada por:
2 2
2 2
2 2
2 2
2 2
2
1 1 1 1 1 1
2 2 2 2 2 2
1 1 1 1 1
2 2 2 2 2
1 1 1 1
2 2 2 2
1 1 12
2 2 2
1 1
2 2
1
2
e e
e
e
B C B C B C v B E C F C E B F v B H C J C H B J v
C B B F C E v C F B E B J C H v C J B H
E F E F E F v E H F J F H E J vt E
AF E E J F H v F J E H
s im e tr ic a H J H J H J v
J H
K
2
: 1c o n v
Ahora, el vector de fuerzas de cuerpo está dado por:
0 0
T T T
d d d
e
f N b B D ε B σ
(5.20)
Si se considera una fuerza másica constante se tiene:
/ 2
/ 2
0
0
0
0 3
0
0
e
e
i
i
t
TxT j e e
x y x y x y
yjt
k
k
N
N
bN t Ad x d y d z d x d y d z b b b b b b
bN
N
N
N b
(5.21)
En la anterior integral se ha considerado que:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
165

1
3i x e x
N b d x d y A b
(5.22)
ya que Nibx es una función lineal definida sobre un dominio triangular. Ahora, si
consideramos esfuerzos de origen térmicos, las el vector de fuerzas equivalentes está
dado por:
0 2
(1 )
2 (1 )
TT eE t v T
d B C E F H Jv
B D ε
(5.23)
El cálculo del vector de fuerzas nodales q se realiza de manera similar, obteniéndose:
2
TT i i j j k je
x y x y x y
td q q q q q q
e
q N t (5.24)
El balance de fuerzas para el elemento sigue estando dado por la expresión:
e e eK a f q (5.25)
Ejemplo. Determinar la distribución de esfuerzos, deformaciones y reacciones en los
apoyos de la barra mostrada. Emplee una formulación por elementos finitos basados en
una hipótesis de esfuerzo plano. Considere el espesor de la lamina igual a 0.5in y E =
29.5x106 psi y v = 0.29. Desprecie cualquier tipo de fuerza másica y efectos térmicos.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
166
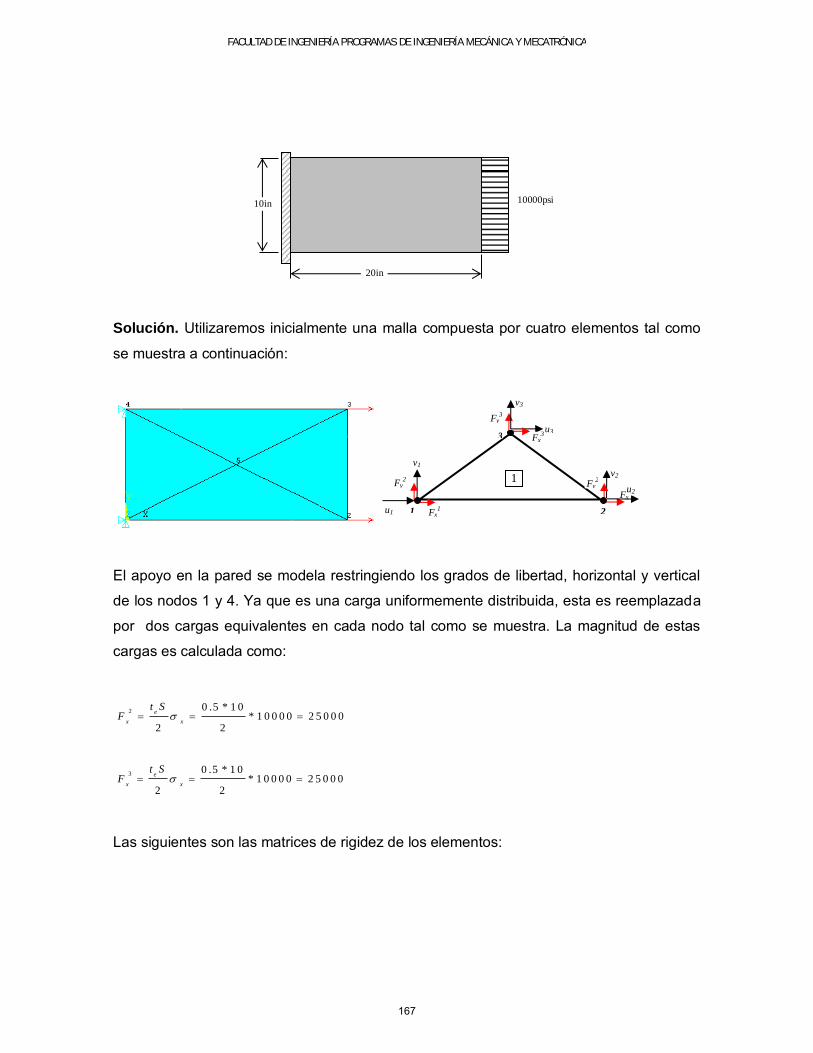
Solución. Utilizaremos inicialmente una malla compuesta por cuatro elementos tal como
se muestra a continuación:
El apoyo en la pared se modela restringiendo los grados de libertad, horizontal y vertical
de los nodos 1 y 4. Ya que es una carga uniformemente distribuida, esta es reemplazada
por dos cargas equivalentes en cada nodo tal como se muestra. La magnitud de estas
cargas es calculada como:
2
3
0 .5 * 1 0* 1 0 0 0 0 2 5 0 0 0
2 2
0 .5 * 1 0* 1 0 0 0 0 2 5 0 0 0
2 2
e
x x
e
x x
t SF
t SF
Las siguientes son las matrices de rigidez de los elementos:
Fx2
3 u3
v3
Fx3
Fy3
2
v2
Fy2
u2
1 u1
v1
Fx1
Fy2 1
20in
10in 10000psi
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
167
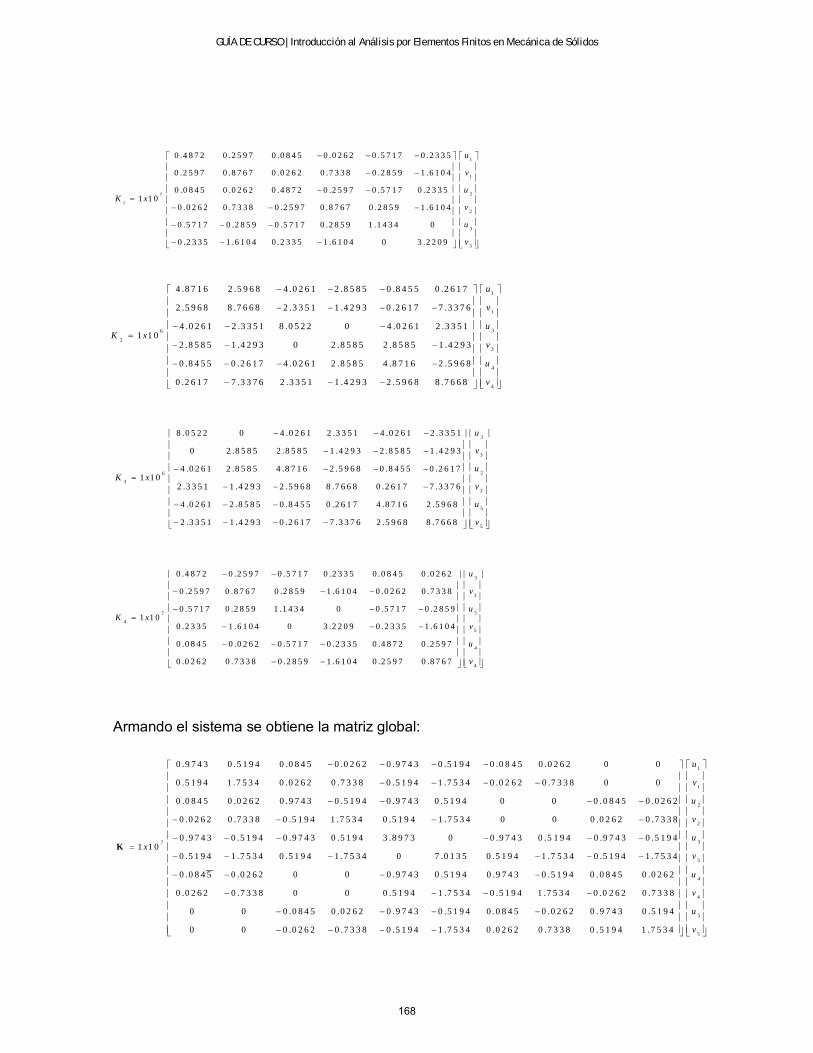
7
1
0 .4 8 7 2 0 .2 5 9 7 0 .0 8 4 5 0 .0 2 6 2 0 .5 7 1 7 0 .2 3 3 5
0 .2 5 9 7 0 .8 7 6 7 0 .0 2 6 2 0 .7 3 3 8 0 .2 8 5 9 1 .6 1 0 4
0 .0 8 4 5 0 .0 2 6 2 0 .4 8 7 2 0 .2 5 9 7 0 .5 7 1 7 0 .2 3 3 51 1 0
0 .0 2 6 2 0 .7 3 3 8 0 .2 5 9 7 0 .8 7 6 7 0 .2 8 5 9 1 .6 1 0 4
0 .5 7 1 7 0 .2 8 5 9 0 .5 7 1 7 0 .2 8 5 9 1 .1 4 3 4 0
0 .2
K x
1
1
2
2
3
33 3 5 1 .6 1 0 4 0 .2 3 3 5 1 .6 1 0 4 0 3 .2 2 0 9
u
v
u
v
u
v
6
2
4 .8 7 1 6 2 .5 9 6 8 4 .0 2 6 1 2 .8 5 8 5 0 .8 4 5 5 0 .2 6 1 7
2 .5 9 6 8 8 .7 6 6 8 2 .3 3 5 1 1 .4 2 9 3 0 .2 6 1 7 7 .3 3 7 6
4 .0 2 6 1 2 .3 3 5 1 8 .0 5 2 2 0 4 .0 2 6 1 2 .3 3 5 11 1 0
2 .8 5 8 5 1 .4 2 9 3 0 2 .8 5 8 5 2 .8 5 8 5 1 .4 2 9 3
0 .8 4 5 5 0 .2 6 1 7 4 .0 2 6 1 2 .8 5 8 5 4 .8 7 1 6 2 .5 9 6 8
0 .2 6 1
K x
1
1
3
3
4
47 7 .3 3 7 6 2 .3 3 5 1 1 .4 2 9 3 2 .5 9 6 8 8 .7 6 6 8
u
v
u
v
u
v
6
3
8 .0 5 2 2 0 4 .0 2 6 1 2 .3 3 5 1 4 .0 2 6 1 2 .3 3 5 1
0 2 .8 5 8 5 2 .8 5 8 5 1 .4 2 9 3 2 .8 5 8 5 1 .4 2 9 3
4 .0 2 6 1 2 .8 5 8 5 4 .8 7 1 6 2 .5 9 6 8 0 .8 4 5 5 0 .2 6 1 71 1 0
2 .3 3 5 1 1 .4 2 9 3 2 .5 9 6 8 8 .7 6 6 8 0 .2 6 1 7 7 .3 3 7 6
4 .0 2 6 1 2 .8 5 8 5 0 .8 4 5 5 0 .2 6 1 7 4 .8 7 1 6 2 .5 9 6 8
2 .3 3 5
K x
3
3
2
2
5
51 1 .4 2 9 3 0 .2 6 1 7 7 .3 3 7 6 2 .5 9 6 8 8 .7 6 6 8
u
v
u
v
u
v
7
4
0 .4 8 7 2 0 .2 5 9 7 0 .5 7 1 7 0 .2 3 3 5 0 .0 8 4 5 0 .0 2 6 2
0 .2 5 9 7 0 .8 7 6 7 0 .2 8 5 9 1 .6 1 0 4 0 .0 2 6 2 0 .7 3 3 8
0 .5 7 1 7 0 .2 8 5 9 1 .1 4 3 4 0 0 .5 7 1 7 0 .2 8 5 91 1 0
0 .2 3 3 5 1 .6 1 0 4 0 3 .2 2 0 9 0 .2 3 3 5 1 .6 1 0 4
0 .0 8 4 5 0 .0 2 6 2 0 .5 7 1 7 0 .2 3 3 5 0 .4 8 7 2 0 .2 5 9 7
0 .0 2 6 2 0 .
K x
3
3
5
5
4
47 3 3 8 0 .2 8 5 9 1 .6 1 0 4 0 .2 5 9 7 0 .8 7 6 7
u
v
u
v
u
v
Armando el sistema se obtiene la matriz global:
7
0 .9 7 4 3 0 .5 1 9 4 0 .0 8 4 5 0 .0 2 6 2 0 .9 7 4 3 0 .5 1 9 4 0 .0 8 4 5 0 .0 2 6 2 0 0
0 .5 1 9 4 1 .7 5 3 4 0 .0 2 6 2 0 .7 3 3 8 0 .5 1 9 4 1 .7 5 3 4 0 .0 2 6 2 0 .7 3 3 8 0 0
0 .0 8 4 5 0 .0 2 6 2 0 .9 7 4 3 0 .5 1 9 4 0 .9 7 4 3 0 .5 1 9 4 0 0 0 . 0 8 4 5 0 .0 2 6 2
0 .0 2 6 2 0 .7 3 3 8 0 .5 1 9 4 1 .7 5 3 4 0 .5 1 9
1 1 0x
K
4 1 .7 5 3 4 0 0 0 .0 2 6 2 0 .7 3 3 8
0 .9 7 4 3 0 .5 1 9 4 0 .9 7 4 3 0 .5 1 9 4 3 .8 9 7 3 0 0 .9 7 4 3 0 .5 1 9 4 0 .9 7 4 3 0 .5 1 9 4
0 .5 1 9 4 1 .7 5 3 4 0 .5 1 9 4 1 .7 5 3 4 0 7 .0 1 3 5 0 .5 1 9 4 1 .7 5 3 4 0 .5 1 9 4 1 .7 5 3 4
0 .0 8 4 5 0 .0 2 6 2 0 0 0 .9 7 4 3 0 .5 1 9 4 0 .9 7 4 3 0 .5 1 9 4 0 . 0 8 4 5 0 .0 2 6 2
0
1
1
2
.0 2 6 2 0 .7 3 3 8 0 0 0 .5 1 9 4 1 .7 5 3 4 0 .5 1 9 4 1 .7 5 3 4 0 .0 2 6 2 0 .7 3 3 8
0 0 0 .0 8 4 5 0 .0 2 6 2 0 .9 7 4 3 0 .5 1 9 4 0 .0 8 4 5 0 .0 2 6 2 0 . 9 7 4 3 0 .5 1 9 4
0 0 0 .0 2 6 2 0 .7 3 3 8 0 .5 1 9 4 1 .7 5 3 4 0 .0 2 6 2 0 .7 3 3 8 0 . 5 1 9 4 1 .7 5 3 4
u
v
u
v
2
3
3
4
4
5
5
u
v
u
v
u
v
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
168

Y el vector de fuerzas nodales:
1 2
1 1 1
1 2
1 1 1
1 3
2 2
1 3
2 2
1 2 3 4
3 3 3 3
1 2 3 4
3 3 3 3
2 4
4 4 4
2 4
4 4 4
3 4
5 5
3 4
5 5
2 5 0 0 0
0
0
0
2 5 0 0 0
0
x x x
y y y
x x
y y
x x x x
y y y y
x x x
y y y
x x
y y
q q R
q q R
q q
q q
q q q q
q q q q
q q R
q q R
q q
q q
q
Reduciendo el sistema según los grados de libertad conocidos y resolviendo se obtienen
las siguientes graficas presentadas en 6.3. Si calculamos el desplazamiento a través de
las ecuaciones dadas por la resistencia de materiales para el caso de barras cargadas
axialmente, en los puntos de aplicación de la carga encontramos:
6
5 0 0 0 0 * 2 00 .0 0 6 7 7
( 2 9 .5 1 0 )(1 0 * 0 .5 )
P Lin
E A x
Si comparamos este valor con el valor de 0.00622in dado por el modelo por elementos
finitos encontramos un error del 8.12% aproximadamente.
Figura 5.3. Izquierda: distribución de desplazamientos. Derecha: distribución de esfuerzos.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
169
Los esfuerzos y deformaciones pueden ser calculados a partir de los desplazamientos
nodales empleando los polinomios de interpolación para cada uno de ellos y a través de la
Ley de Hooke dada en las ecuaciones (3.2). La figura 5.3 muestra la distribución de
esfuerzos normales en dirección x. Si aplicamos la ecuación dada en mecánica de
materiales: xx=P/A para calcular el esfuerzo normal desarrollado encontraríamos:
xx=50000/(10*0.5) = 10000 psi
Este valor se encuentra muy cercano 10001 psi dado por el modelo para puntos alejados
de los puntos de aplicación de carga (según el principio de Saint Venant). Lo cual indica
que el modelo trabaja bien.
Análisis de Convergencia. Observamos sin embargo, que esta distribución de esfuerzos
es uniforme hacia los extremos de la barra, donde se esperaría una distorsión del campo
de deformaciones y de esfuerzos. Lo cual sugiere que se debe emplear una malla con
elementos más pequeños, específicamente en puntos de interés en el análisis.
Realizando un análisis de convergencia, podemos obtener una malla que nos permita
capturar mejor los gradientes de desplazamientos y de esfuerzos en zonas de interés. La
figura 5.4 muestra el análisis de convergencia para el esfuerzo xx en el punto de
coordenadas (0,5) y la distribución de esfuerzos obtenida empleando una malla de 129
elementos. Este análisis muestra como varían los esfuerzos en un punto específico del
cuerpo en función del tamaño de elemento. Se observa en este caso como el xx tiende
hacia el valor del 9900 psi a medida que aumenta el número de elementos.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
170
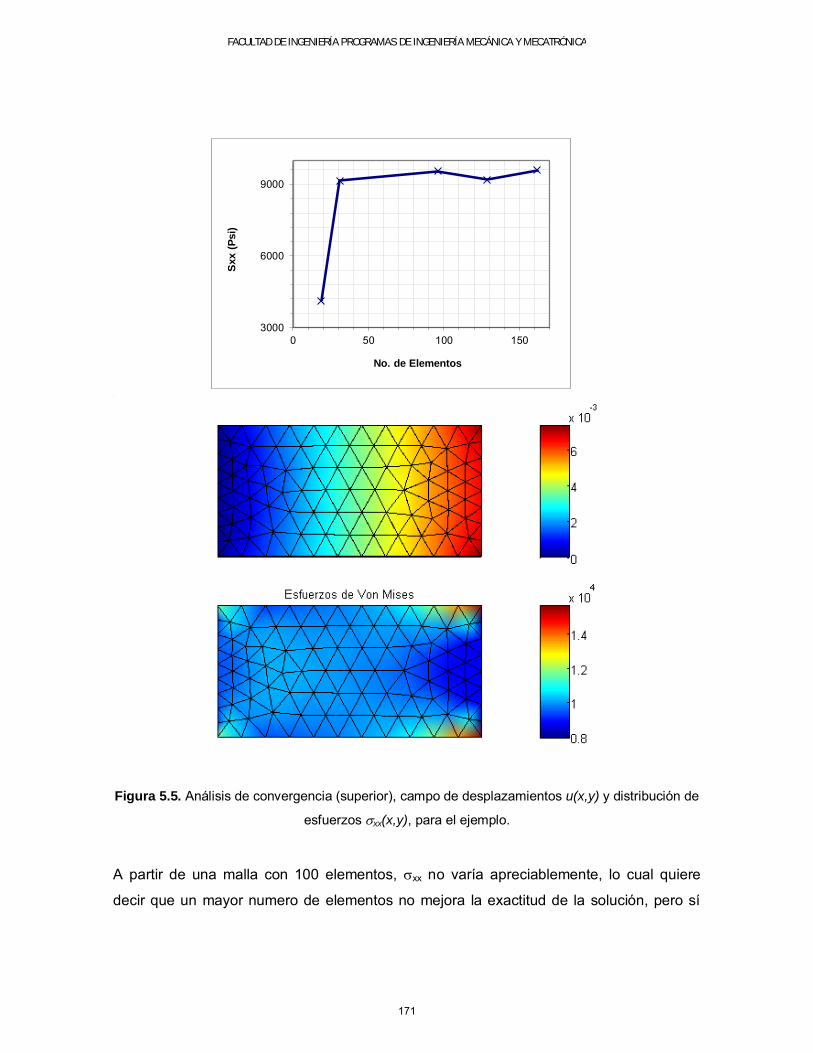
Figura 5.5. Análisis de convergencia (superior), campo de desplazamientos u(x,y) y distribución de
esfuerzos xx(x,y), para el ejemplo.
A partir de una malla con 100 elementos, xx no varía apreciablemente, lo cual quiere
decir que un mayor numero de elementos no mejora la exactitud de la solución, pero sí
3000
6000
9000
0 50 100 150
Sxx (
Psi)
No. de Elementos
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
171
representa un aumento en el costo computacional (mayor numero de matrices a evaluar!,
por ejemplo) y un aumento en el error numérico por truncamiento generado por el
computador.
Los gráficos demuestran como puede cambiar drásticamente la distribución de esfuerzos
a medida que la malla es refinada. Es por esto que los análisis de convergencia son
necesarios y no pueden faltar en todo análisis por elementos finitos.
5.2.3.2 Consideraciones para el Empleo de Elementos “CST”. Al utilizar mallas
construidas con elementos triangulares, debe tenerse cuidado en dos aspectos
importantes. El primero de ellos tienen que ver con hecho de que los elementos
triangulares interpolan esfuerzos y deformaciones dentro del elemento a través de
funciones constantes, lo cual significa que en zonas donde existen gradientes de
deformación o esfuerzo significativos se requieren tamaños de elemento más pequeños
para poder captar estas variaciones. Además este aspecto genera una discontinuidad en
el campo de esfuerzos y deformaciones en las fronteras de los elementos.
El segundo aspecto tiene que ver con el hecho de que las mallas que se generan
empleando elementos triangulares son, en general, irregulares lo cual puede ser muy
perjudicial ya que pueden presentarse resultados muy erróneos. Para el ejemplo que
venimos tratando observe la respuesta que se obtiene con la malla particular empleada
(figura 5.5).
Debido a la distribución no uniforme de los nodos en la frontera derecha de aplicación de
carga, en la cual los elementos no tienen igual longitud de lado y como la carga es
aplicada en estos, se observa como existe una deformación vertical en el elemento (no
simétrica, al igual que la distribución de esfuerzos desarrollada). Y esto es debido a la
distribución al tamaño no uniforme de los elementos. Este es uno de los puntos débiles de
los elementos triangulares: no son capaces de modelar respuestas simétricas.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
172
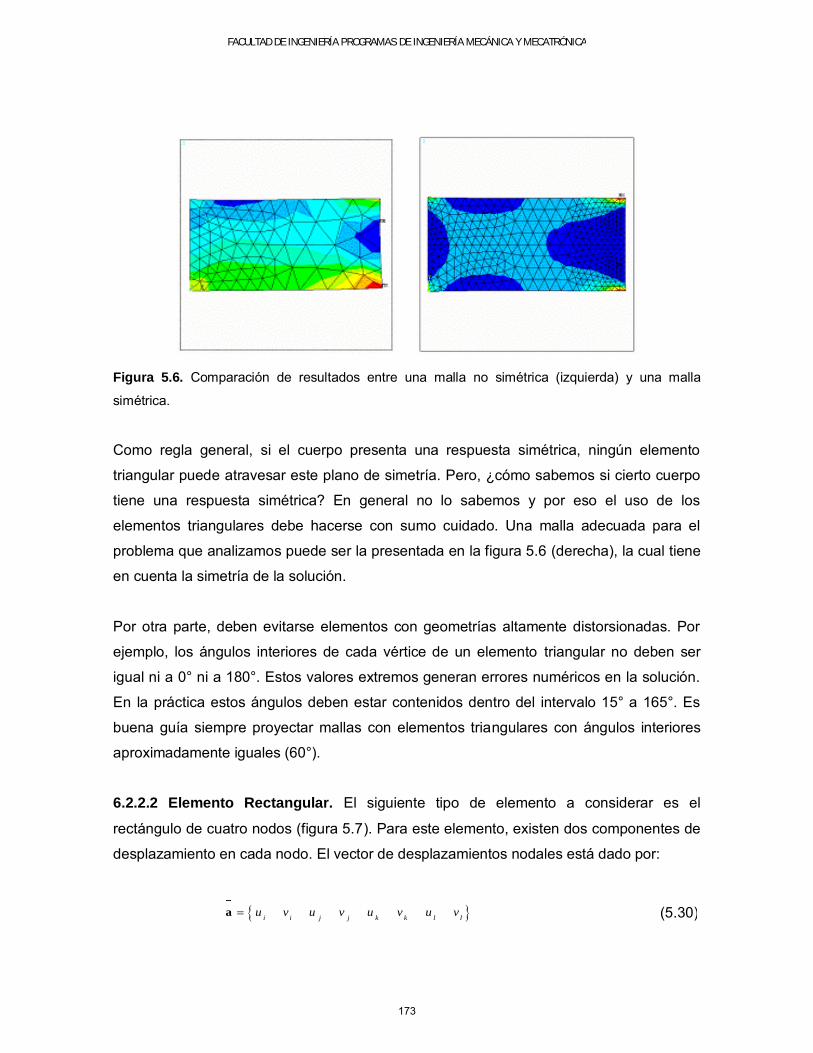
Figura 5.6. Comparación de resultados entre una malla no simétrica (izquierda) y una malla
simétrica.
Como regla general, si el cuerpo presenta una respuesta simétrica, ningún elemento
triangular puede atravesar este plano de simetría. Pero, ¿cómo sabemos si cierto cuerpo
tiene una respuesta simétrica? En general no lo sabemos y por eso el uso de los
elementos triangulares debe hacerse con sumo cuidado. Una malla adecuada para el
problema que analizamos puede ser la presentada en la figura 5.6 (derecha), la cual tiene
en cuenta la simetría de la solución.
Por otra parte, deben evitarse elementos con geometrías altamente distorsionadas. Por
ejemplo, los ángulos interiores de cada vértice de un elemento triangular no deben ser
igual ni a 0° ni a 180°. Estos valores extremos generan errores numéricos en la solución.
En la práctica estos ángulos deben estar contenidos dentro del intervalo 15° a 165°. Es
buena guía siempre proyectar mallas con elementos triangulares con ángulos interiores
aproximadamente iguales (60°).
6.2.2.2 Elemento Rectangular. El siguiente tipo de elemento a considerar es el
rectángulo de cuatro nodos (figura 5.7). Para este elemento, existen dos componentes de
desplazamiento en cada nodo. El vector de desplazamientos nodales está dado por:
i i j j k k l lu v u v u v u va (5.30)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
173
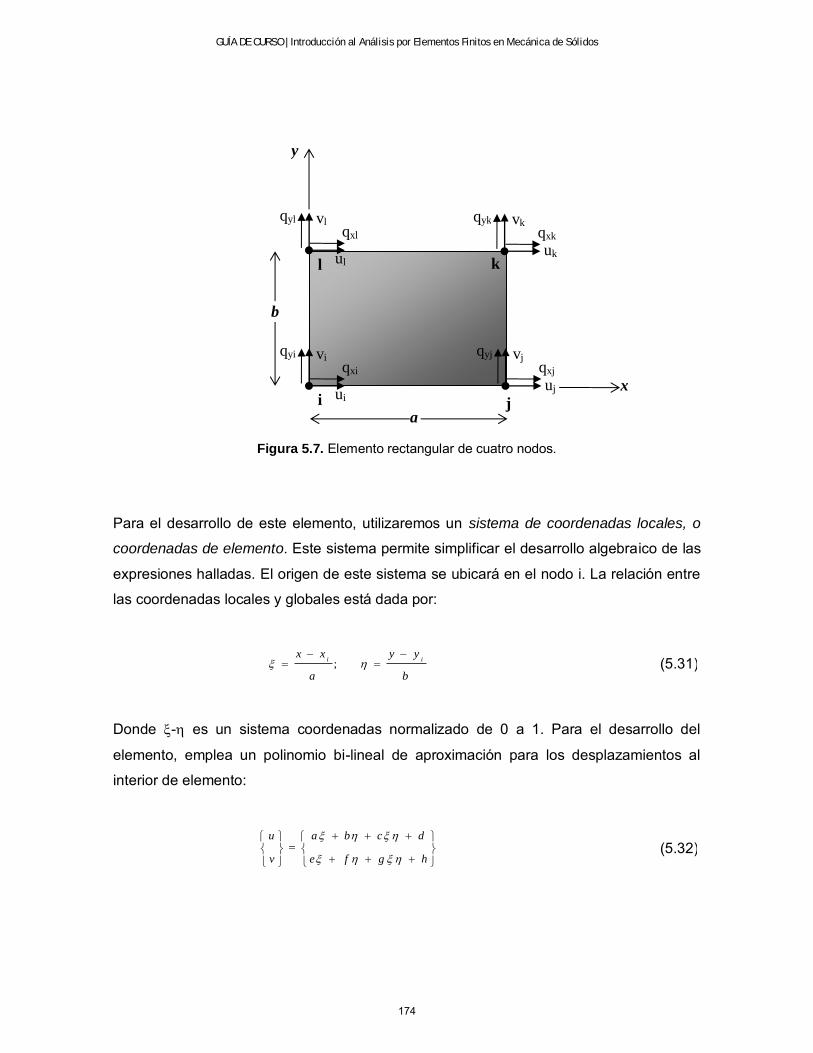
Figura 5.7. Elemento rectangular de cuatro nodos.
Para el desarrollo de este elemento, utilizaremos un sistema de coordenadas locales, o
coordenadas de elemento. Este sistema permite simplificar el desarrollo algebraico de las
expresiones halladas. El origen de este sistema se ubicará en el nodo i. La relación entre
las coordenadas locales y globales está dada por:
;i i
x x y y
a b
(5.31)
Donde - es un sistema coordenadas normalizado de 0 a 1. Para el desarrollo del
elemento, emplea un polinomio bi-lineal de aproximación para los desplazamientos al
interior de elemento:
u a b c d
v e f g h
(5.32)
j
uj
vj qxj
qyj
k uk
vk qxk
qyk
l ul
vl qxl
qyl
i ui
vi qxi
qyi
x
y
a
b
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
174

Donde las constantes a…h son determinadas a partir de los desplazamientos en nodos9.
De esta manera, los desplazamientos son representados por polinomios de segundo
grado. Se emplean las siguientes condiciones de borde para determinar las constantes:
(0 , 0 ) , (1, 0 ) , (1,1) , ( 0 ,1)
(0 , 0 ) , (1, 0 ) , (1,1) , ( 0 ,1)
i j k l l
i j k l l
u u u u u u u u
v v v v v v v v
(5.33)
Sustituyendo estas condiciones en las ecuaciones (7.29) se determinan las constantes
dadas para obtener:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
i j k l
i j k l
a x b y x b y x y a x yu u u u u
a b a b a b a b
a x b y x b y x y a x yv v v v v
a b a b a b a b
(5.34)
Escritas en forma matricial:
1 2 3 4
1 2 3 4
0 0 0 0
0 0 0 0
N N N Nu
N N N Nv
a
(5.35)
Con las funciones de formas dadas por:
9 No debe confundirse los coeficientes a y b de estos polinomios con las longitudes de los lados del elemento.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
175
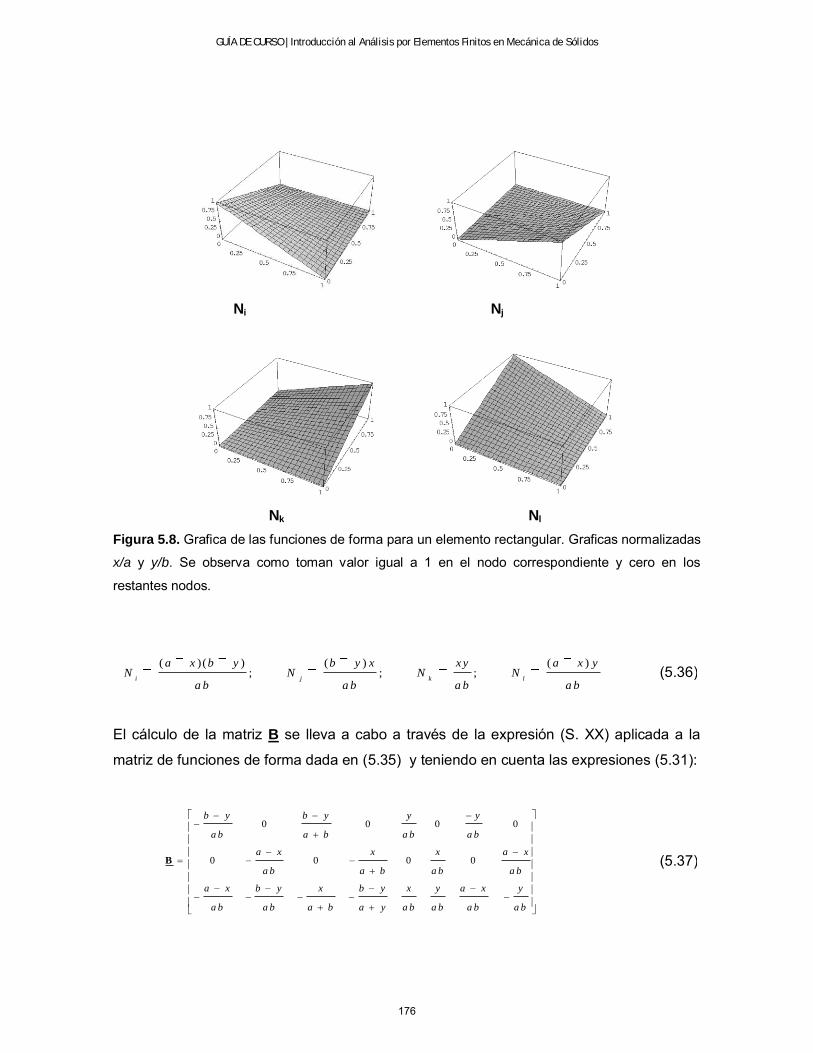
Ni Nj
Nk Nl
Figura 5.8. Grafica de las funciones de forma para un elemento rectangular. Graficas normalizadas
x/a y y/b. Se observa como toman valor igual a 1 en el nodo correspondiente y cero en los
restantes nodos.
( )( ) ( ) ( ); ; ;
i j k l
a x b y b y x x y a x yN N N N
a b a b a b a b (5.36)
El cálculo de la matriz B se lleva a cabo a través de la expresión (S. XX) aplicada a la
matriz de funciones de forma dada en (5.35) y teniendo en cuenta las expresiones (5.31):
0 0 0 0
0 0 0 0
b y b y y y
a b a b a b a b
a x x x a x
a b a b a b a b
a x b y x b y x y a x y
a b a b a b a y a b a b a b a b
B
(5.37)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
176
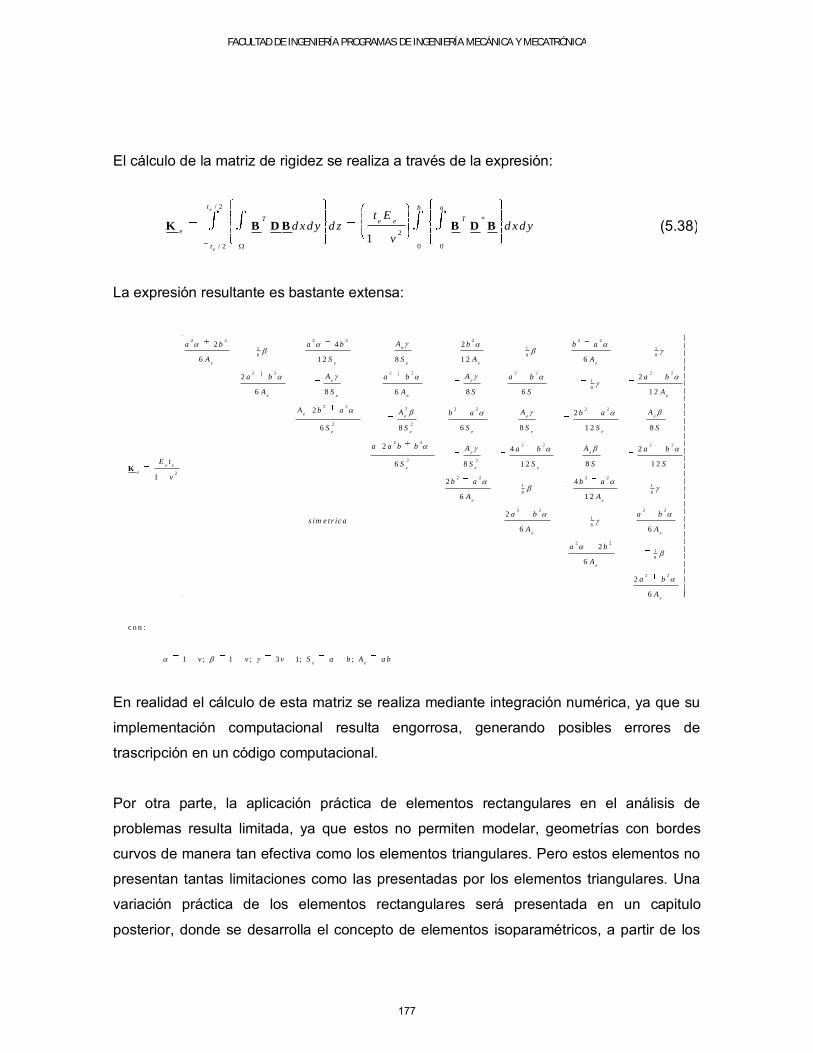
El cálculo de la matriz de rigidez se realiza a través de la expresión:
/ 2
*
2
/ 2 0 01
e
e
t b a
T Te e
e
t
t Ed xd y d z d xd y
v
K B D B B D B
(5.38)
La expresión resultante es bastante extensa:
2 2 2 2 2 2 2
1 1 1
8 8 8
2 2 2 2 2 2 2 2
1
8
2 22 2 2 2 2
2 2
2 3
2 2
2
2 4 2
6 1 2 8 1 2 6
2 2
6 8 6 8 6 1 2
2 2
6 8 1 2 86 8
2 4
6 8
1
e
e e e e e
e e
e e e e
ee e e
e e ee e
e
e ee e
e
Aa b a b b b a
A S S A A
A Aa b a b a b a b
A S A S S A
A b a A A Ab a b a
S S S SS S
a a b b A
E t S S
v
K
2 2 2 2
2 2 2 2
1 1
8 8
2 2 2 2
1
8
2 2
1
8
2 2
2
8 1 21 2
2 4
6 1 2
2
6 6
2
6
2
6
c o n :
1 ; 1 ;
e
e
e e
e e
e
e
Aa b a b
S SS
b a b a
A A
a b a bs im e tr ic a
A A
a b
A
a b
A
v v
3 1; ; e e
v S a b A a b
En realidad el cálculo de esta matriz se realiza mediante integración numérica, ya que su
implementación computacional resulta engorrosa, generando posibles errores de
trascripción en un código computacional.
Por otra parte, la aplicación práctica de elementos rectangulares en el análisis de
problemas resulta limitada, ya que estos no permiten modelar, geometrías con bordes
curvos de manera tan efectiva como los elementos triangulares. Pero estos elementos no
presentan tantas limitaciones como las presentadas por los elementos triangulares. Una
variación práctica de los elementos rectangulares será presentada en un capitulo
posterior, donde se desarrolla el concepto de elementos isoparamétricos, a partir de los
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
177
cuales, elementos cuadriláteros (“rectángulos deformados”) pueden ser generados,
permitiendo así modelar de manera mas exacta contornos curvos. La formulación
isoparamétrica como se verá, es una de las características más sobresalientes del
método de los elementos finitos en comparación con otros métodos numéricos de
solución.
5.3 Deformación Plana
Una simplificación similar al caso de esfuerzo plano es posible en el otro extremo, cuando
la dimensión del cuerpo en dirección z es mucho mayor que sus dimensiones en las
direcciones x y y. Sí un cilindro largo o un cuerpo prismático, cargado por fuerzas
perpendiculares a elementos longitudinales y estas no varían a lo largo de la longitud del
cuerpo, puede asumirse que todas las secciones se encuentran bajo la misma condición
de esfuerzo. Entonces se puede suponer, en primera instancia, que dichas secciones se
encuentran confinadas entre superficies rígidas y sin fricción de tal manera que la
componente desplazamiento w en la dirección axial sea cero. Ya que no existe
desplazamiento en los extremos, y por simetría en la sección media, puede asumirse que
lo mismo se mantiene para toda sección transversal. Este comportamiento puede
entenderse imaginando que las deformaciones axiales (perpendiculares a un plano
normal del cuerpo) no pueden desarrollarse debido a la restricción impuesta por el
material en ubicado en esa dirección. De esta manera, existe un esfuerzo axial que impide
esta deformación.
Existen muchos problemas prácticos importantes de este tipo: la pared de contención de
una represa, túneles, tuberías cilíndricas con presión interna, cuerpos prismáticos, En
todos los casos la carga es constante a lo largo de la longitud. Ya que las condiciones son
las mismas en todas las secciones transversales, en tipo de problemas se considera una
sección del cuerpo de longitud unitaria.
En problemas de deformación plana se presentan esfuerzos y deformaciones en un solo
plano, debido a que la componente axial de desplazamiento es nula. Empleando las
ecuaciones (2.16) y teniendo en cuenta las anteriores consideraciones:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
178

2
2
x x x x x x y y
y y y y x x y y
x y x y
z z x x y y
G
G
G
(5.39)
Luego de realizar algunas simplificaciones las tres primeras ecuaciones pueden ser
escritas en forma matricial como:
1 0
1 0(1 )(1 2 )
0 0 (1 ) / 2 2
x x x x
y y y y
x y x y
v v
Ev v
v vv
σ Dε (5.40)
La cuarta ecuación no ha sido incluida, ya que el valor de zz puede ser calculado a través
de las deformaciones xx y yy. Se observa entonces, que las ecuaciones de Hooke para el
caso de deformación plana y de deformación plana solo difieren en las matrices elásticas
D. Por lo que el procedimiento seguido para obtener la matriz de rigidez de un elemento
de esfuerzo plano es idéntico al desarrollo de la matriz de rigidez para un elemento de
deformación plana solo cambiando la matriz D. de esta manera, siguiendo el
procedimiento desarrollado en las secciones 5.2.2 y 5.2.2.1 y empleando la matriz D de la
ecuación (6.23) obtenemos el balance de fuerzas para un elemento triangular de
deformación plana:
(1 ) (1 2 )
e e eE t A
v v
e e
K u f F (5.41)
Donde Ke es igual a:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
179

2 2
2
2
2
2
2
2
( )2 2 2 2 2
2 2 2 2 2
2 2 2 2
2 2 2
C F C E C J C HB C B C v B E b F v B H B J v
B B F B E B J B HC C E v C F C H v c j
F F J F HE E F v E H E J v
E E J E HF F H v F J
eK
2
2
2
2
2 2
2
c o n : 1
Js im e tr ic a H H J v
HJ
v
Las constantes A…J son las mismas definidas en (7.17). La matriz (1 ) (1 2 )
e e eE t A
v v
eK es
la matriz de rigidez del elemento. Los vectores de desplazamientos nodales, fuerzas
másicas distribuidas y fuerzas nodales son los dados en la expresión (5.25).
Ejemplo. Tubería de concreto enterrada. La figura 5.8 muestra las distribuciones de
esfuerzos en el suelo y en una tubería enterrada de 1.8 metros de diámetro y 0.10 m de
espesor, desarrollados por efecto de la aplicación de una carga distribuida en la superficie
del terreno. El problema fue analizado considerando una condición de deformación plana,
empleando elementos triangulares tal como se desarrolló en esta sección. Se empleó el
software ANSYS 6.0 para analizar el problema. Iguales resultados se obtienen con el
programa PLNSTRAIN desarrollado en MATLAB.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
180
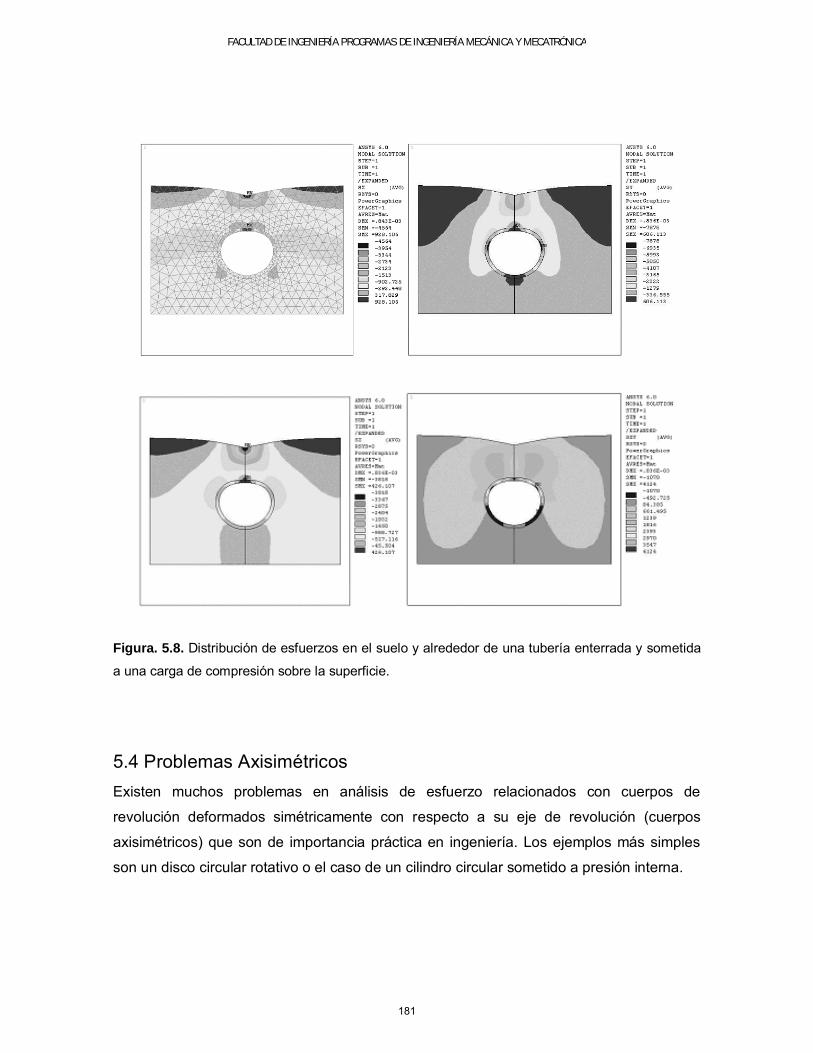
Figura. 5.8. Distribución de esfuerzos en el suelo y alrededor de una tubería enterrada y sometida
a una carga de compresión sobre la superficie.
5.4 Problemas Axisimétricos
Existen muchos problemas en análisis de esfuerzo relacionados con cuerpos de
revolución deformados simétricamente con respecto a su eje de revolución (cuerpos
axisimétricos) que son de importancia práctica en ingeniería. Los ejemplos más simples
son un disco circular rotativo o el caso de un cilindro circular sometido a presión interna.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
181

5.4.1 Ecuaciones de Gobierno
En una cuerpo cargado con fuerzas axisimétricas, los desplazamientos en dirección son
nulos y las componentes de esfuerzo son independientes de esta variable. Teniendo en
cuenta esto, las componentes de deformación empleando las ecuaciones (2.9c) son:
; ;
0
r r z
r r z z
z r
r z
z r
u u u
r r z
u u
r z
(5.42)
La ley de Hooke en forma matricial puede ser escrita a partir de las ecuaciones (2.18c)
como:
1 0(1 ) (1 )
1 0(1 )(1 )
(1 ) (1 2 )1 0
2(1 2 )
2 (1 )
z z z z
r r r r
r z r z
v v
v v
vE v
vv v
s im e tr ic a
v
v
σ Dε
(5.43)
Con lo cual las ecuaciones de balance de momentum en coordenadas cilíndricas (2.14c)
se reducen a:
(5.44)
Reemplazando (8.1) en (8.2) y esta última en (8.3) se obtienen las ecuaciones de
gobierno para un problema de esfuerzo axisimétrico:
0
0
r rr r r z
r z z z r z
r z r
r z r
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
182

2 2 2
2 2 2 2
2 2 2
2 2 2
1 1( ) ( )
1 1( ) ( )
z r r z r r
r r
z z z z z
r z
u u u u u ur u f
r r r z r r r z r t
u u u u ur u f
z r r z r r r z t
(5.45)
Con las condiciones de borde:
0 0
0 0
0 0
( , , ) , ( , , ) , [ 0 , ]
( , , ) , [ 0 , ]
( , , ) , ( , , ) , 0
( , ) , ( , ) , 0
r r z z u
t
r r z z v
r r z z a
u r z t u u r z t u r z t t
r z t n r z t t
u r z t u u r z t u r z t
u x t u u x t u r z t
σ
(5.46)
5.4.2 Formulación por Elementos Finitos
6.4.2.1 Triángulos tres nodos. La formulación por elementos finitos tipo triangulo, parte
de polinomios lineales de aproximación para las variables ur y uz, siendo estas funciones
de r y z, similares a los empleados en el caso de esfuerzo y deformación plana:
0 0 0( , )
0 0 0
i
r
i
z
j
i j kr r
j
i j kz z
k
r
k
z
u
u
N N Nu ur z
N N Nu u
u
u
u (5.47)
En este caso, la matriz B está dada por la expresión:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
183

0
0 0 0
0 0 000 0 0 1
0 0 01 2 0 0 00
i j k
i j k e
zC F J
B E HN N Nr
A B r C z D E r F z G H r J zN N N A
r r rr
C B F E J H
z r
B
(5.48)
El procedimiento a emplear para el desarrollo de la matriz de rigidez de un elemento tipo
triangulo sigue los mismos pasos presentados a lo largo de capitulo. A partir de las
expresiones (5.46) se obtienen las expresiones para la matriz de rigidez y los vectores de
fuerzas nodales:
1 1 1 2 1 3 1 4 1 5 1 6
2 2 2 3 2 4 2 5 2 6
2 *
3 3 3 4 3 5 3 6
4 4 4 5 4 60
5 5 5 6
6 6
2
T e
e
e
k k k k k k
k k k k k
k k k krd r d z d
k k kA
S im é tr ic a k k
k
K B D B (5.49)
Aquí, e
r es la distancia perpendicular desde el eje de revolución al centroide del elemento.
Las componentes están definidas como:
2
1 1( ) ( )k G J D J D D J ;
1 2( )k D G G D J
1 3( ) ;k G H E D J
1 4( )k E G H D J
1 5( ) ;k G I F D J
1 6( )k F G I D J
2 2
2 2;k D G
2 3k E G D H G L
2 4;k D E G H
2 5k F G D I G M
2 6;k D F G I 2
3 3( ) ( )k H L E L E E L
3 4( ) ;k E H H E L
3 5( ) ( )k H I F E L M E L
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
184

3 6( ) ;k F H I E L 2 2
4 4k E H
4 5k F H E I H M ;
4 6k E F H I
2
5 5( ) ( )k I M F M F F M ;
5 6( )k F I I F M
2 2
6 6k F I
Con:
j k k jA x y x y
j kD y y
k jG x x
e e eJ A r D G z r
k i i kB x y x y
k iE y y
i kH x x
e e eL B r E H z r
i j j iC x y x y
j iF y y
j iI x x
e e eM C r F I z r
Donde e
z es la distancia perpendicular desde el eje r al centroide del elemento.
Por otra parte, para el caso en que la fuerza másica sea constante, el vector de fuerzas
másicas distribuidas está dado por la expresión:
2
0
2
3
TT i i j j k ke e
r z r z r z
A rd r d z d b b b b b b
N b (5.50)
Se debe recordar que b representa, en este caso, fuerzas por unidad de volumen del
material. El vector de fuerzas nodales está dado por:
2T
T i i j j k k
e r z r z r zd r q q q q q q
e
q N t (5.51)
Donde en este caso t representa una fuerza distribuida por unidad de longitud
circunferencial.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
185

Capitulo 6.
Sólidos Elásticos
6.1 Introducción
Se habrá observado que la metodología de formulación de problemas por el método de
los elementos finitos empleada hasta el momento se hace fácilmente extensible al caso
de análisis es esfuerzos en problemas de elasticidad tridimensional. Tal aplicación resulta
de gran interés en ingeniería mecánica, en donde la complejidad de muchos componentes
de maquinas y estructurales, impiden la obtención de soluciones analíticas exactas al
problema. Siendo este uno de los campos donde el método de los elementos finitos cobra
una importancia vital. Sin embargo como se verá, el costo computacional en la solución
de problemas prácticos, también puede resultar bastante elevado, debido a la
dimensionalidad del problema, lo cual redunda en el numero de ecuaciones simultaneas
por resolver, si se desean obtener soluciones con un cierto orden de aproximación, lo cual
requerirá contar con computadores de alta capacidad de computo. Para tener una idea del
tamaño de un problema, consideremos el problema 6.1, donde se consideró el problema
de una placa cargada sobre su plano. Si el mismo problema es resuelto empleando
elementos tetraédricos de 3 nodos y no triángulos, tendríamos, para los mismos 131
elementos una malla de aproximadamente 330 nodos (por lo menos), y si consideramos
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
187

que los tetraedros presentan 3 grados de libertad por nodo, estamos hablando de un
problema con 990 ecuaciones simultaneas aproximadamente, lo cual presenta hoy en día
un problema computacionalmente, muy real. No es por lo tanto sorprendente que el
tiempo de cálculo sea elevado en análisis tridimensional de esfuerzos.
En el presente capitulo, se estudiará la formulación por elementos finitos de problemas en
elasticidad lineal, abordando el desarrollo de elementos tipo “brick” y tetraedros. Estos,
representan la extensión tridimensional a los cuadriláteros y triángulos.
6.2 Ecuación de Gobierno
Las ecuaciones de gobierno para problemas tridimensionales de elasticidad están dadas
por el sistema dado en la tabla 2.1, las cuales son escritas nuevamente:
Ecuaciones de balance de momentum:
2
2
x yx x x z
x
uf
x y z t
2
2
y x y y y z
y
vf
x y z t
2
2
z yz x z z
z
wf
x y z t
(6.1)
Ecuaciones cinemáticas:
x x
u
x
; ,y y z z
v w
y z
; x y
u v
y x
; ;x z y z
u w v w
z x z y
(6.2)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
188

2 ;
2 ;
2 ;
x x x x x x y y z z x y x y
y y y y x x y y z z x z x z
z z z z x x y y z z y z y z
G G
G G
G G
(6.3)
Como se explicó en la sección 2.8, las ecuaciones (6.1) pueden ser escritas en función de
los desplazamientos, a través de las ecuaciones (6.2) y (6.3), lo cual conduce a las
ecuaciones de Navier:
2
2
2
2
2
2
2
2
2
( )
( )
( )
uG d iv u G u
x t
vG d iv u G v
y t
wG d iv u G w
z t
(6.4)
Con las condiciones de borde e iniciales:
0
0
0
( , , , ) , , [ 0 , ]
( , , , ) , , [ 0 , ]
( , , , ) , , 0
( , , , ) , , 0
u
t
v
a
u x y z t u x y z t t
x y z t n x y z t t
u x y z t u x y z t
u x y z t u x y z t
σ
(6.5)
6.3. Formulación por elementos finitos
Al igual que en los casos anteriores, la discretización por elementos finitos del problema
tridimensional, está dado por la expresión (3.69):
Ecuaciones constitutivas:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
189

e e eK a f q
(6.6)
Donde:
T
ed
K B D B
(6.7)
0 0
T T T
d d d
e
f N b B D ε B σ
(6.8)
T
d
e
q N t
(6.9)
Donde no se han considerado efectos dinámicos. En el caso mas general de análisis
tridimensional de cuerpos elásticos, la matriz de coeficientes elásticos está dada por:
1 0 0 01 1
1 0 0 01
1 0 0 0
1 20 0
2 (1 )
1 20
2 (1 )
1 2
2 (1 )
v v
v v
v
v
v
v
vs im e tr ic a
v
v
v
D
(6.10)
La matriz S está dada por la expresión (2.20):
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
190
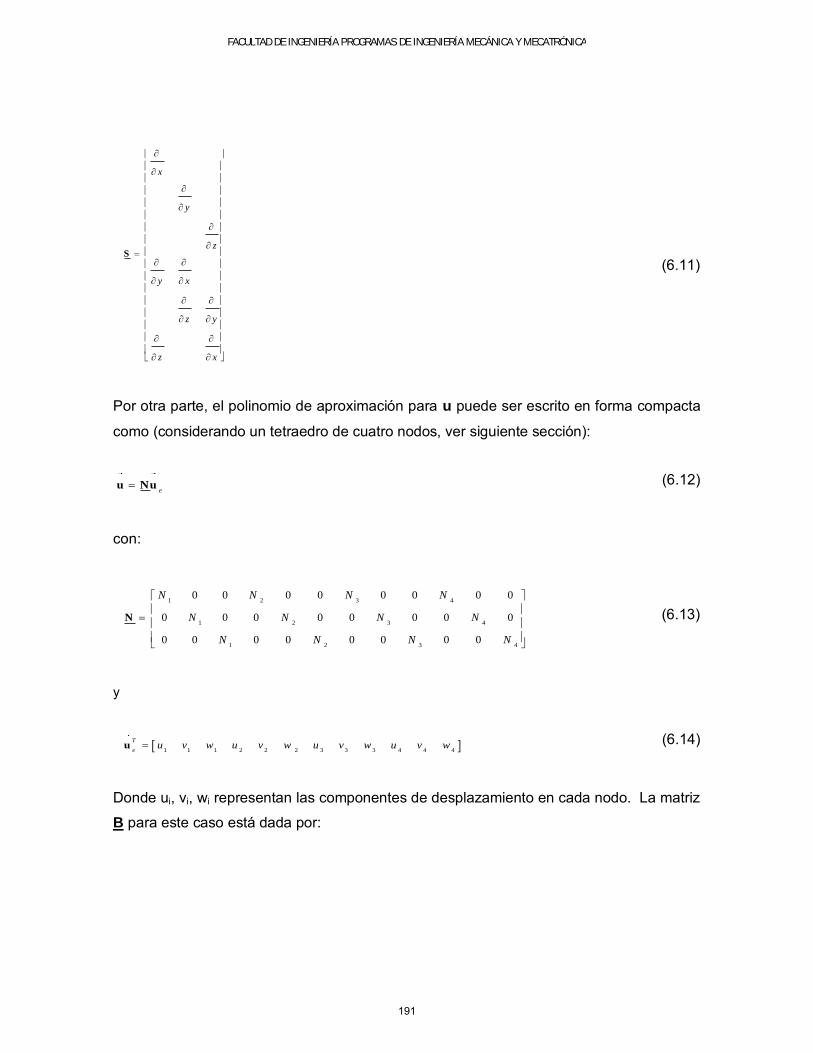
x
y
z
y x
z y
z x
S
(6.11)
Por otra parte, el polinomio de aproximación para u puede ser escrito en forma compacta
como (considerando un tetraedro de cuatro nodos, ver siguiente sección):
eu Nu
(6.12)
con:
1 2 3 4
1 2 3 4
1 2 3 4
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
N N N N
N N N N
N N N N
N
(6.13)
y
1 1 1 2 2 2 3 3 3 4 4 4
T
eu v w u v w u v w u v wu
(6.14)
Donde ui, vi, wi representan las componentes de desplazamiento en cada nodo. La matriz
B para este caso está dada por:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
191
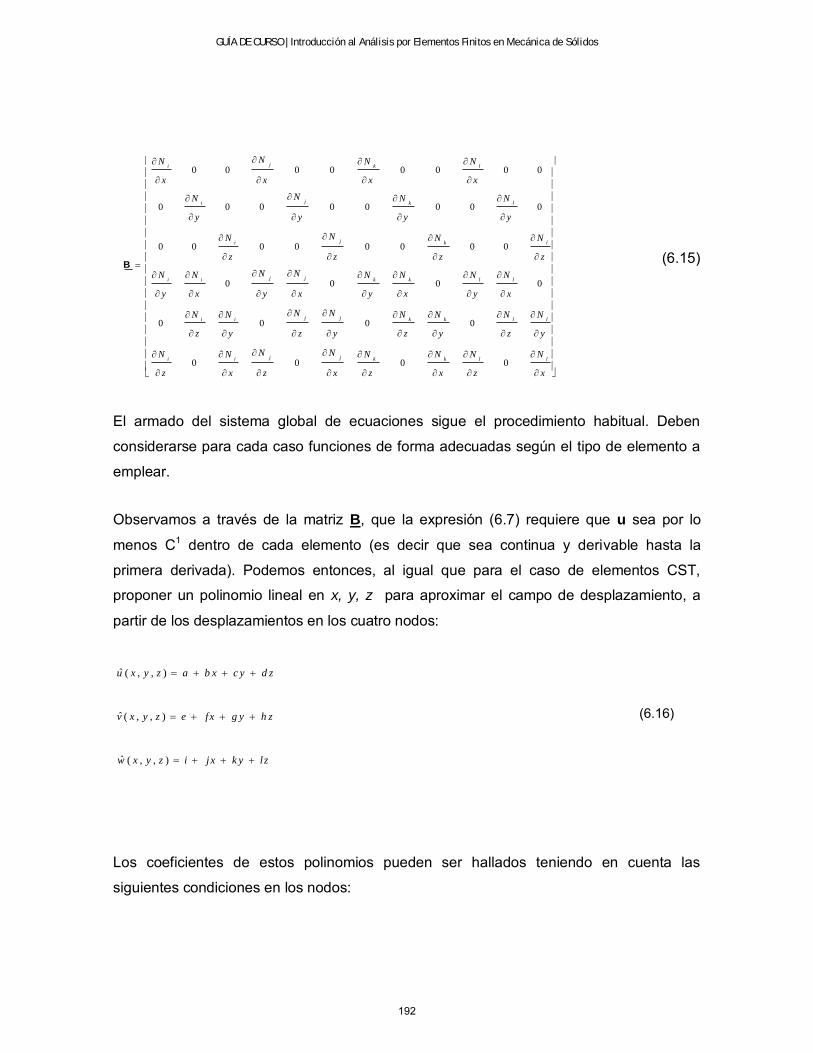
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0
0 0 0 0
0 0
ji k l
ji k l
ji k l
j ji i k k l l
j ji i k k l l
j ji i k
NN N N
x x x x
NN N N
y y y y
NN N N
z z z z
N NN N N N N N
y x y x y x y x
N NN N N N N N
z y z y z y z y
N NN N N
z x z x
B
0 0k l l
N N N
z x z x
(6.15)
El armado del sistema global de ecuaciones sigue el procedimiento habitual. Deben
considerarse para cada caso funciones de forma adecuadas según el tipo de elemento a
emplear.
Observamos a través de la matriz B, que la expresión (6.7) requiere que u sea por lo
menos C1 dentro de cada elemento (es decir que sea continua y derivable hasta la
primera derivada). Podemos entonces, al igual que para el caso de elementos CST,
proponer un polinomio lineal en x, y, z para aproximar el campo de desplazamiento, a
partir de los desplazamientos en los cuatro nodos:
ˆ ( , , )
ˆ ( , , )
ˆ ( , , )
u x y z a b x c y d z
v x y z e fx g y h z
w x y z i jx k y lz
(6.16)
Los coeficientes de estos polinomios pueden ser hallados teniendo en cuenta las
siguientes condiciones en los nodos:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
192

Figura 6.1. Elemento tetraédrico de cuatro nodos. La numeración de los nodos es similar
a la numeración para los elementos CST. En este caso, se escoge cualquier nodo y se
enumera en sentido contrario a las manecillas del reloj mirando desde el nodo escogido.
Por ejemplo: klij ó desde i: ikjl.
( , , ) , ( , , ) , ( , , ) , ( , , )
( , , ) , ( , , ) , ( , , ) , ( , , )
( , , ) , ( , , ) , ( , , ) , ( , , )
i i i i j j j j k k k k l l l l
i i i i j j j j k k k k l l l l
i i i i j j j j k k k k l l l l
u x y z u u x y z u u x y z u u x y z u
v x y z v v x y y v v x y z v v x y z v
w x y z w w x y y w w x y z w w x y z w
(6.17)
Las cuales son reemplazadas en (6.17) para hallar los coeficientes desconocidos. De esta
manera, por ejemplo, el polinomio de interpolación para u(x,y,z) queda de la forma
general:
uj j
vj
wj
k
uk
vk
wk
i
ui
wi
vi
l
ul
vl
wl
x
y
z
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
193

ˆ ( , , )
ˆ ( , , )
ˆ ( , , )
i i j j k k l l
i i j j k k l l
i i j j k k l l
u x y z N u N u N u N u
v x y z N v N v N v N v
w x y z N w N w N w N w
(6.18)
con:
;6 6
;6 6
j j j ji i i i
i j
e e
k k k k l l l l
k l
e e
a b x c y d za b x c y d zN N
V V
a b x c y d z a b x c y d zN N
V V
(6.19)
con:
1
d e t ; d e t 1
1
1 1
d e t 1 ; d e t 1
1 1
j j j j j
i k k k i k k
l l l l l
j j j j
j k k i k k
l l l l
x y z y z
a x y z b y z
x y z y z
x z x y
c x z d x y
x z x y
(6.20)
Donde xj, yj, zj representan las coordenadas nodales del nodo j, por ejemplo. Las
restantes constantes se obtienen de la misma manera mediante permutación cíclica de
los subíndices i, j, k, l. Ve es el volumen del elemento, el cual puede ser calculado a partir
de las coordenadas nodales:
1
11d e t
16
1
i i i
j j j
e
k k k
l l l
x y z
x y zV
x y z
x y z
(6.21)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
194

A partir de las expresiones halladas, podemos determinar la matriz B y a partir de esta y
con la matriz D determinar la matriz de rigidez del elemento. Aplicando entonces la matriz
operadora S sobre la matriz N, obtenemos:
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 01
0 0 0 06
0 0 0 0
0 0 0 0
i j k l
i j k l
i j k k
i i j j k k l le
i i j j k k l l
i i j j k k l l
b b b b
c c c c
d d d d
c b c b c b c bV
d c d c d c d c
d b d b d b d b
B
(6.22)
Las derivadas obtenidas son independientes tanto de x como de y, lo cual indica que se
tienen expresiones constantes para los esfuerzos y deformaciones dentro del elemento, al
igual que en el elemento CST. Reemplazando en la ecuación (6.7) e integrando
obtenemos la matriz de rigidez para un elemento tetraédrico de cuatro nodos:
(1 )
7 2 (1 ) (1 2 )
T
e
E v
V v v
e
K B D B
(6.23)
No se ha expandido esta expresión ya que resulta bastante extensa, tal como se podrá
verificar. De igual manera computacionalmente la expresión (6.24) es fácilmente
programable, no necesitando ser expandida de forma explicita. Para el caso en que tanto
las fuerzas de cuerpo como los esfuerzos en las caras de elemento sean constantes se
obtienen expresiones similares al caso CST (lo cual no es de extrañar). Las fuerzas de
cuerpo son reemplazadas por fuerzas nodales equivalentes a una cuarta parte de la
fuerza másica, de manera similar un esfuerzo uniformemente distribuido sobre una cara
del elemento es reemplazado por fuerzas puntuales de igual magnitud aplicadas a los
nodos que definen la cara.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
195

Capitulo 7.
Elementos Transformados
7.1 Introducción
El capitulo presenta un aspecto importante en el modelamiento por elementos finitos,
como lo son los temas de funciones de forma, integración numérica y elementos
transformados. La primera parte del capitulo trata el tema de funciones de forma desde un
contexto generalizado. Se presenta la generación de funciones a través de los polinomios
de Lagrange y Hermite, así como el triangulo de pascal para elementos de triangulares y
cuadriláteros. La segunda parte, se trata el tema de elementos transformados y el
concepto de elementos paramétricos, los cuales se definen a través de un sistema de
coordenadas del elemento, permite desarrollar elementos distorsionados que permiten
capturar geometrías más complejas. En esta sección se presenta igualmente el concepto
de sistema local de coordenadas o sistema de coordenada del elemento, y la relación
existente entre la geometría real del elemento y este sistema de coordenadas. La última
parte del capitulo trata sobre la implementación de estrategias de integración numérica
para el cálculo de las matrices de rigidez de los elementos. Se estudia específicamente
las reglas de integración de Gauss (cuadratura de Gauss), la cual es la utilizada en
elementos finitos. Relacionado con este tema se presenta la transformación del dominio
de integración y el concepto de elemento maestro es presentado.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
197

7.2 Integración Numérica
El empleo de esquemas de integración numérica resultad esencial en la evaluación de
integrales para calculo de matrices de rigidez de elementos y otras integrales, en el
calculo de éstas para elementos isoparamétricos. Esto permite evaluar numéricamente
estas integrales de forma exacta, lo cual evita la manipulación algebraica que conlleva un
cálculo explicito, lo cual permite una implementación computacional mas rápida (y tal vez
con menos errores). La práctica estándar ha sido el uso de las reglas de integración de
Gauss, ya que estas minimizan el número de puntos de muestreo necesarios para
alcanzar el grado de precisión requerido.
7.2.1 Reglas de Integración Unidimensional
La regla de integración de Gauss para integrales en dominios unidimensionales está dada
por la expresión general:
1
11
( ) ( )
p
i i
i
F d w F
(7.1)
Donde p 1 representa el número de puntos de integración de Gauss empleados, wi son
números de ponderación de integración, y i son las abcisas de los puntos de integración
en el intervalo [-1,1]10. La tabla 7.1 muestra las coordenadas de los puntos de integración
y los valores de w para cada uno de estos puntos. Para obtener una tabla mas completa
puede acudirse a diversos textos de análisis numéricos como aquellos dados en la
referencia. En general, una regla de integración de Gauss unidimensional con p puntos de
integración integra exactamente polinomios hasta de orden igual o menor a 2p-1.
10 Se observa que se emplea el sistema de coordenadas del elemento (coordenadas locales).
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
198
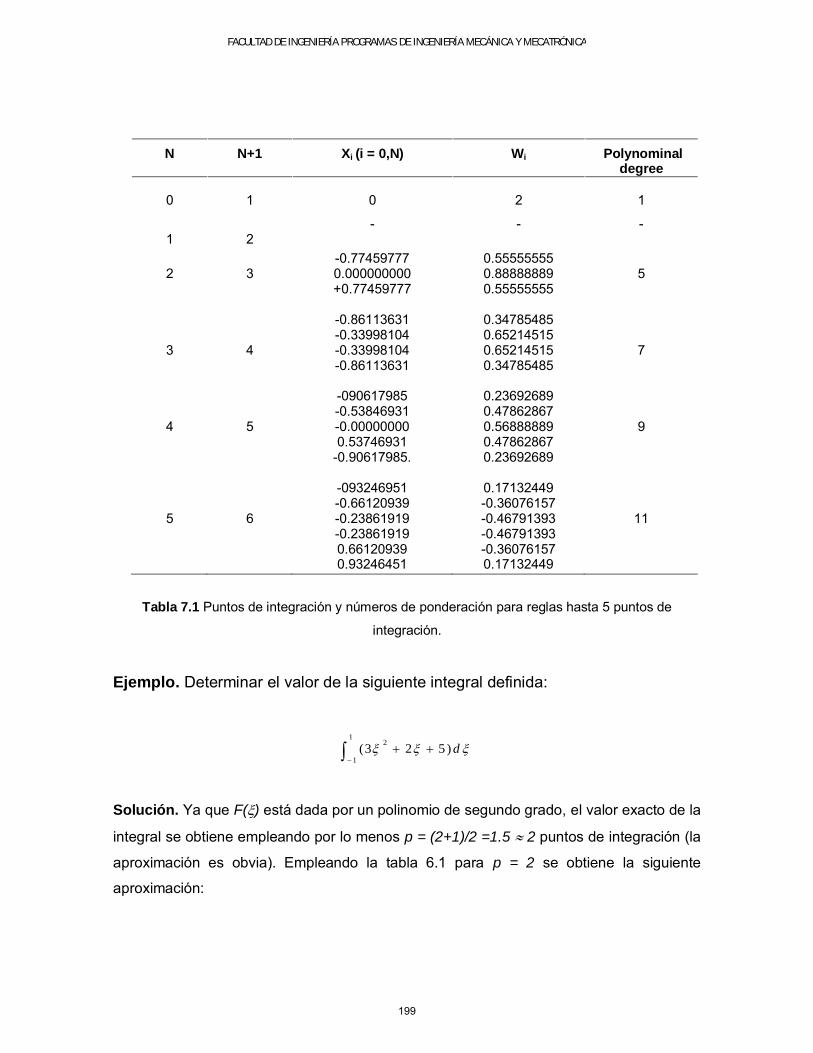
N N+1 Xi (i = 0,N) Wi Polynominal degree
0
1
0
2
1
1
2
- - -
2
3
-0.77459777 0.000000000 +0.77459777
0.55555555 0.88888889 0.55555555
5
3
4
-0.86113631 -0.33998104 -0.33998104 -0.86113631
0.34785485 0.65214515 0.65214515 0.34785485
7
4
5
-090617985 -0.53846931 -0.00000000 0.53746931
-0.90617985.
0.23692689 0.47862867 0.56888889 0.47862867 0.23692689
9
5
6
-093246951 -0.66120939 -0.23861919 -0.23861919 0.66120939 0.93246451
0.17132449 -0.36076157 -0.46791393 -0.46791393 -0.36076157 0.17132449
11
Tabla 7.1 Puntos de integración y números de ponderación para reglas hasta 5 puntos de
integración.
Ejemplo. Determinar el valor de la siguiente integral definida:
12
1
(3 2 5 ) d
Solución. Ya que F() está dada por un polinomio de segundo grado, el valor exacto de la
integral se obtiene empleando por lo menos p = (2+1)/2 =1.5 2 puntos de integración (la
aproximación es obvia). Empleando la tabla 6.1 para p = 2 se obtiene la siguiente
aproximación:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
199

1
2
1
(3 2 5 ) (1) * 1 / 3 (1) * ( 1 / 3 ) 1 2d F F
El cual concuerda con el valor exacto de la integral.
Ejemplo. Determine el valor exacto de la siguiente integral:
14 3
1
(3 8 2 ) d
Solución. Para este caso, deben emplearse (4+1)/2 = 2.5 3 puntos de integración.
Nuevamente de la tabla 6.1 se obtienen las coordenadas de los puntos de integración y
números de ponderación:
1 = -0.774597 w1=0.5555
2 = 0 w2=0.8889
3 = 0.774597 w3=0.555
Con lo cual se obtiene la aproximación:
14 3
1 1 2 2 3 31
(3 8 2 ) ( ) ( ) ( ) 2 .0d w F w F w F
El lector puede verificar que el valor obtenido es igual a la solución exacta de dicha
integral. Hay que resaltar que la exactitud de dicha solución se encuentra ligada al
número de decimales de 1 como de w1, ya que a excepción de la regla de integración con
un punto, estos números son irracionales. Observe que la tabla 6.1 presenta estos
números con 12 cifras significativas.
7.2. Integración Bidimensional y Tridimensional
Las reglas de integración bidimensional son obtenidas aplicando las reglas
unidimensionales a cada integral de forma independiente. De esta manera se tiene la
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
200
juangabriel
Texto escrito a máquina
2

siguiente expresión general para una integral sobre el dominio bidimensional [-1,1] x [-
1,1]:
1 2
1 1 1 1 1
1 1 1 1 11
1 1
1 11 1
( , ) ( , ) ( , )
( , ) ( , )
p
i i
i
p p
j i i j
j i
F d d F d d w F d
F d d w w F
(7.2)
Donde p1 y p2 representan los puntos de integración gaussiana utilizados en cada una de
las direcciones y respectivamente. Usualmente estos valores son iguales si se toman
las mimas funciones de forma en cada una de estas direcciones. En este caso, se
emplean para cada una de estas direcciones los mismos valores de ponderación dados
para el caso unidimensional.
Ejemplo. Hallar numéricamente el valor de la siguiente integral:
1 1
2 3 2
1 1
6 7 2 d d
Solución. El polinomio bidimensional presentado es de grado 3 en y de grado 2 en . Por lo
tanto la integración exacta en dirección se obtiene con (3+1)/2 = 2 puntos de integración y en la
dirección se requieren (2+1)/2 = 1.5 2 puntos de integración. De esta manera se tienen las
coordenadas de los puntos de integración y los valores de ponderación:
Punto (i,j)
i j wi wj
(1,1) -
1.732050 -1.732050 1 1
(2,1) 1.732050 -1.732050 1 1
(1,2) -
1.732050 1.732050 1 1
(2,2) 1.732050 1.732050 1 1
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
201

Empleando estos valores se obtiene:
2 2
1 12 3 2
1 11 1
6 7 2 ( , ) 8 .0j i i i
j i
d d w w F
Por otra parte, para el caso de integrales sobre un dominio tridimensional definido por [-
1,1] x [-1,1] x [-1,1], pueden ser evaluadas numéricamente a través del procedimiento
empleado para evaluar integrales sobre dominios tridimensionales. Generalizando este
procedimiento se obtiene para el caso tridimensional:
3 1 21 1 1
1 1 11 1 1
( , ) ( , , )
p p p
k j i i j k
k j i
F d d w w w F
(7.3)
Ejemplo. Halla el valor de la siguiente integral:
1 1 1
4 3 2
1 1 1
2 d d
Solución. En este caso el número de puntos de integración a utilizar en cada una de las
direcciones son:
En dirección: (4+1)/2 = 2.5 3
En dirección : (1+1)/2 = 1
En dirección : (3+1)/2 = 2
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
202
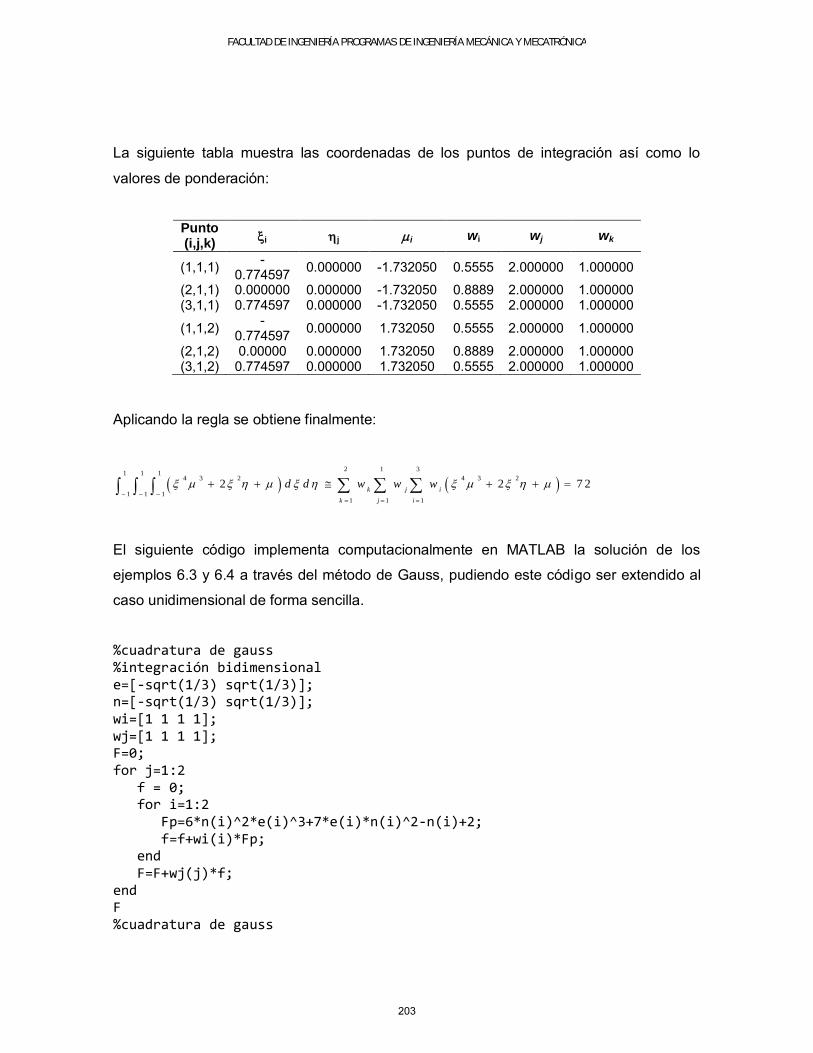
La siguiente tabla muestra las coordenadas de los puntos de integración así como lo
valores de ponderación:
Punto (i,j,k)
i j i wi wj wk
(1,1,1) -
0.774597 0.000000 -1.732050 0.5555 2.000000 1.000000
(2,1,1) 0.000000 0.000000 -1.732050 0.8889 2.000000 1.000000 (3,1,1) 0.774597 0.000000 -1.732050 0.5555 2.000000 1.000000
(1,1,2) -
0.774597 0.000000 1.732050 0.5555 2.000000 1.000000
(2,1,2) 0.00000 0.000000 1.732050 0.8889 2.000000 1.000000 (3,1,2) 0.774597 0.000000 1.732050 0.5555 2.000000 1.000000
Aplicando la regla se obtiene finalmente:
2 1 3
1 1 14 3 2 4 3 2
1 1 11 1 1
2 2 7 2k j i
k j i
d d w w w
El siguiente código implementa computacionalmente en MATLAB la solución de los
ejemplos 6.3 y 6.4 a través del método de Gauss, pudiendo este código ser extendido al
caso unidimensional de forma sencilla.
%cuadratura de gauss %integración bidimensional e=[-sqrt(1/3) sqrt(1/3)]; n=[-sqrt(1/3) sqrt(1/3)]; wi=[1 1 1 1]; wj=[1 1 1 1]; F=0; for j=1:2 f = 0; for i=1:2 Fp=6*n(i)^2*e(i)^3+7*e(i)*n(i)^2-n(i)+2; f=f+wi(i)*Fp; end F=F+wj(j)*f; end F %cuadratura de gauss
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
203
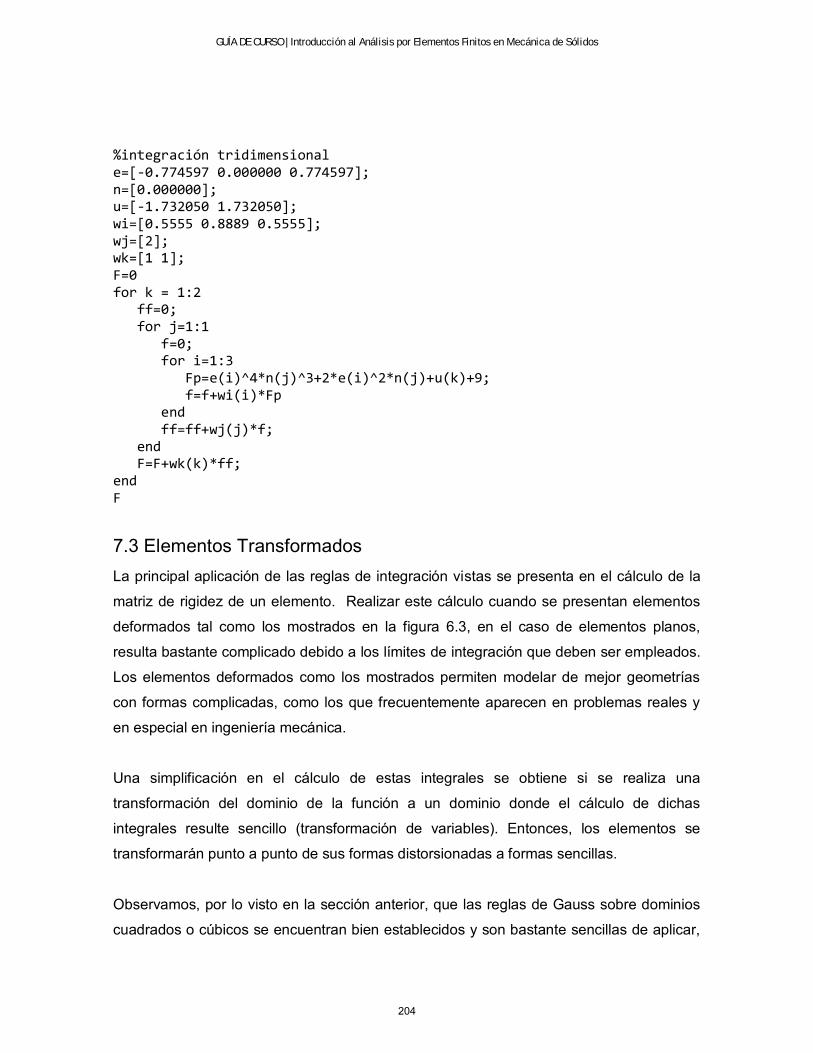
%integración tridimensional e=[-0.774597 0.000000 0.774597]; n=[0.000000]; u=[-1.732050 1.732050]; wi=[0.5555 0.8889 0.5555]; wj=[2]; wk=[1 1]; F=0 for k = 1:2 ff=0; for j=1:1 f=0; for i=1:3 Fp=e(i)^4*n(j)^3+2*e(i)^2*n(j)+u(k)+9; f=f+wi(i)*Fp end ff=ff+wj(j)*f; end F=F+wk(k)*ff; end F
7.3 Elementos Transformados
La principal aplicación de las reglas de integración vistas se presenta en el cálculo de la
matriz de rigidez de un elemento. Realizar este cálculo cuando se presentan elementos
deformados tal como los mostrados en la figura 6.3, en el caso de elementos planos,
resulta bastante complicado debido a los límites de integración que deben ser empleados.
Los elementos deformados como los mostrados permiten modelar de mejor geometrías
con formas complicadas, como los que frecuentemente aparecen en problemas reales y
en especial en ingeniería mecánica.
Una simplificación en el cálculo de estas integrales se obtiene si se realiza una
transformación del dominio de la función a un dominio donde el cálculo de dichas
integrales resulte sencillo (transformación de variables). Entonces, los elementos se
transformarán punto a punto de sus formas distorsionadas a formas sencillas.
Observamos, por lo visto en la sección anterior, que las reglas de Gauss sobre dominios
cuadrados o cúbicos se encuentran bien establecidos y son bastante sencillas de aplicar,
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
204
por lo menos desde un punto de vista computacional. Entonces el objetivo es realizar una
transformación de variables de integración para el cálculo de la integral. Como se
mencionó en el capitulo 6, la matriz de rigidez general para un elemento tridimensional
está dada por11:
T
v
d x d y d z eK B D B (7.4)
Bajo una transformación, las coordenadas de los puntos del dominio real se encuentran
representadas por coordenadas en el dominio transformado de un elemento maestro. Por
ejemplo, en el caso de elementos cuadriláteros el elemento maestro es un elemento
cuadrado tal como se presenta en la figura 7.1. Esta figura muestra elementos maestros
para elementos unidimensionales, bidimensionales (triángulos y cuadriláteros) y
elementos tridimensionales (tetraedros, pirámides y Bricks). Este elemento maestro
permite evaluar integrales de manera mas simplificada.
Consideremos entonces que las coordenadas x, y, z de un punto cualquiera en el dominio
real del elemento se encuentren relacionadas a través de una función biunivoca con las
coordenadas en el dominio del elemento maestro:
( , , ) ; ( , , ) ; ( , , )x x y y z z (7.5)
Con estas expresiones pueden relacionarse elementos diferenciales en ambos dominios a
través de la derivada total de cada una de estas funciones obteniéndose:
11 El procedimiento presentado es totalmente aplicable al caso de problemas uni y bidimensionales, realizando
las simplificaciones del caso.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
205

Elemento Real Elemento Maestro
Figura 7.1 Transformación de un dominio 2D en un elemento cuadrilátero a un dominio sobre un
elemento maestro.
x x xd x d d d
y y yd y d d d
z z zd z d d d
(7.6)
En forma compacta puede escribirse:
.
x x x
d x d
y y yd y d d
d z dz z z
J
(7.7)
Donde J es la matriz jacobiana. A partir las anteriores expresiones se puede determinar la
relación entre diferenciales de volúmenes y de área, demostrándose que:
=1
=-1
=-1
=1
x=(,)
y=(,)
p(,)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
206

d e t( )d x d y d z d d d J (7.8)
Y como caso especial:
d e t( )d x d y d d J (7.9)
Para este ultimo caso, la matriz jacobiana es:
x y
x y
J
(7.10)
Se observa que por consideraciones físicas det(J)>0. Ahora la integral puede
transformase como:
1 1 1
1 1 1
ˆ ˆ d e t( )T
d d d
eK B D B J
(7.11)
Donde se ha escrito B̂ para indicar que esta matriz ahora es función de las coordenadas:
, y . Para esto, recordemos que esta matriz está dada en función de derivadas con
respecto a x, y y z. En forma general estas derivadas pueden hallarse para una función
cualquiera:
( ( , , ) , ( , , ) , ( , , ))x y z (7.12)
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
207
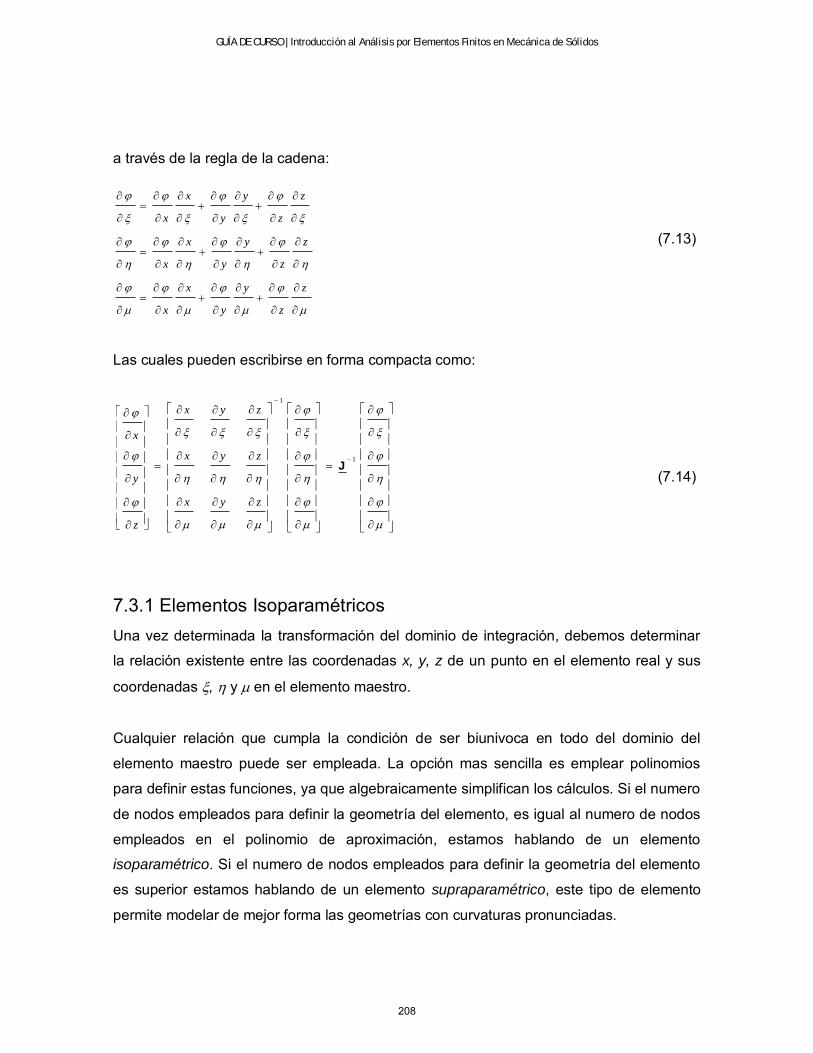
x y z
x y z
x y z
x y z
x y z
x y z
(7.13)
Las cuales pueden escribirse en forma compacta como:
1
1
x y z
x
x y z
y
x y z
z
J
(7.14)
7.3.1 Elementos Isoparamétricos
Una vez determinada la transformación del dominio de integración, debemos determinar
la relación existente entre las coordenadas x, y, z de un punto en el elemento real y sus
coordenadas , y en el elemento maestro.
Cualquier relación que cumpla la condición de ser biunivoca en todo del dominio del
elemento maestro puede ser empleada. La opción mas sencilla es emplear polinomios
para definir estas funciones, ya que algebraicamente simplifican los cálculos. Si el numero
de nodos empleados para definir la geometría del elemento, es igual al numero de nodos
empleados en el polinomio de aproximación, estamos hablando de un elemento
isoparamétrico. Si el numero de nodos empleados para definir la geometría del elemento
es superior estamos hablando de un elemento supraparamétrico, este tipo de elemento
permite modelar de mejor forma las geometrías con curvaturas pronunciadas.
a través de la regla de la cadena:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
208

Ejemplo. a) Determinar la matriz jacobiana para un elemento isoparamétrico
bidimensional de cuatro nodos (cuadrilátero isoparamétrico), mostrado en la figura. b)
determine la matriz de rigidez a través de integración numérica, considerando un
comportamiento de esfuerzo plano con E = 200x109 y v = 0.3.
Solución. a) Ya que se trata de un elemento isoparamétrico, emplearemos las funciones
de forma dadas para un elemento cuadrilátero de cuatro nodos, dado en la sección 6.1,
para transformar el dominio del elemento hacia el elemento maestro. La aproximación es
entonces:
i i j j k k l l
i i j j k k l l
x N x N x N x N x
y N y N y N y N y
donde:
1 11 1 ; 1 1 ;
4 4
1 11 1 ; 1 1 ;
4 4
i j
k l
N N
N N
i j
k l
i (4,3)
j (8,5)
k (6,9)
(3,6) l
x
y
x
Elemento maestro
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
209

Se observa como x y y son funciones de y , a través de las funciones de forma, de esta
manera se tiene:
14 (1 ) 8 (1 ) 6 (1 ) 3 (1 )
4
14 (1 ) 8 (1 ) 6 (1 ) 3 (1 )
4
x
x
Donde se han reemplazado las coordenadas x de cada nodo. Expresiones similares se
obtienen para y. Por otra parte, la matriz jacobiana en este caso está dada por:
x y
x y
J
La cual se obtiene reemplazando las derivadas halladas anteriormente.
b) La matriz de rigidez está dada por:
T
ev
h d x d y eK B D B
La cual debemos transformar a una expresión del tipo:
1 1
1 1
ˆ ˆ d e t( )T
d d
eK B D B J
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
210

0 0 0 0;
0 0 0 0
i j k l
i j k l
x
N N N N
N N N Ny
y x
S N
0 0 0 0
0 0 0 0
ji k l
ji k l
j ji i k k l l
NN N N
x x x x
NN N N
y y y y
N NN N N N N N
y x y x y x y x
B S N
2
1 0
1 01
0 0
v
Ev
vG
D
La cual es obtenida como caso especial de las expresiones dadas en los capítulos 6 y 7.
Las derivadas contenidas en B pueden ser como:
1
NN
x
N N
y
J
Para esto recordemos que la matriz B y D están dadas en este caso por:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
211
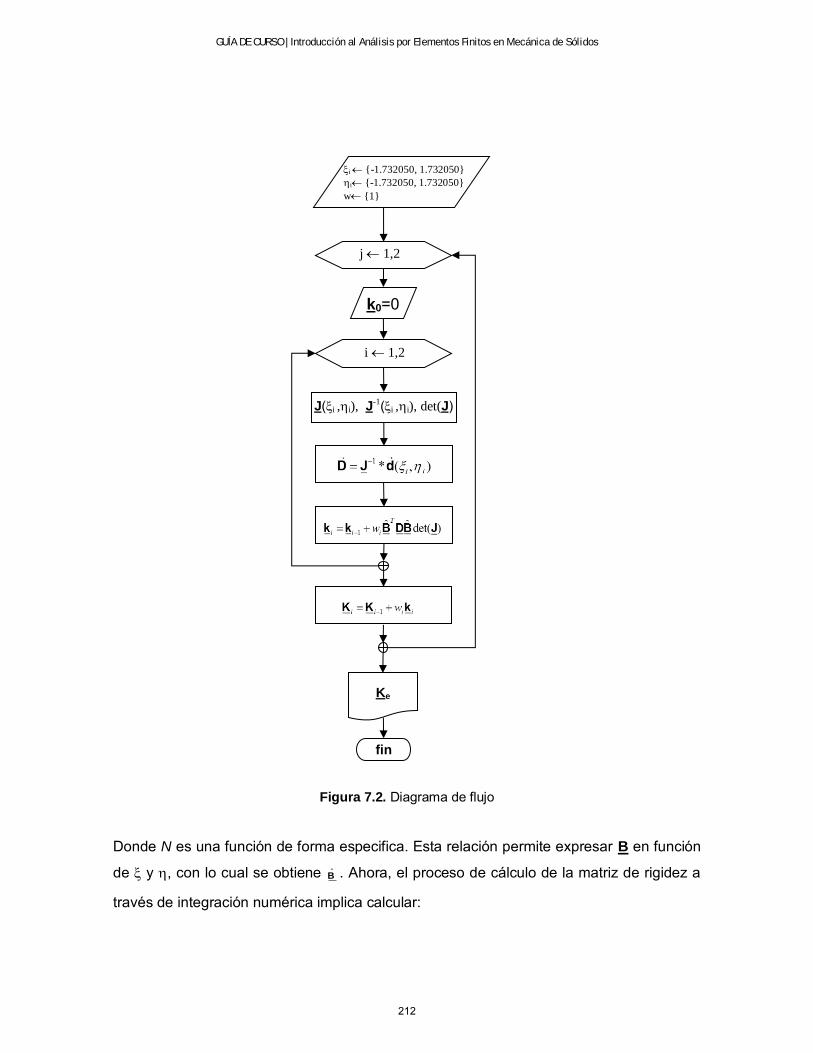
Figura 7.2. Diagrama de flujo
Donde N es una función de forma especifica. Esta relación permite expresar B en función
de y , con lo cual se obtiene B̂ . Ahora, el proceso de cálculo de la matriz de rigidez a
través de integración numérica implica calcular:
j 1,2
i 1,2
J(i ,i), J-1(i ,i), det(J)
Ke
fin
k0=0
i {-1.732050, 1.732050}
i {-1.732050, 1.732050}
w {1}
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
212

2 21 1
1 11 1
ˆ ˆ ˆ ˆd e t( ) ( , ) ( , ) d e t( ( , ) )T T
j i i j i j i j
j i
d d w w e
K B D B J B D B J
El procedimiento de cálculo es mostrado en el siguiente diagrama de flujo mostrado en la
figura 7.2. En el diagrama se ha empleado la convención:
, , ,
T T
N N N N
x y
D d .
La implementación computacional de este algoritmo en MATLAB, se presenta a
continuación:
clear all E=200e9;, v=0.3;, t=1; G=E/(2*(1+v)); x1=4;, x2=8;, x3=6;, x4=3; y1=3;, y2=5;, y3=9;, y4=6; D11=(E/(1-v^2)); D12=(v*E/(1-v^2)); D22=(E/(1-v^2)); D66=G; D=[D11,D12,0;D12,D22,0;0,0,D66]; Ke=zeros(8);, eg = [-0.5773502692; 0.5773502692]; ng = [-0.5773502692; 0.5773502692]; for i = 1:2 for j = 1:2 B=zeros(3,8); e = eg(i); n = ng(j); J11 = -0.25*(1-n)*x1+0.25*(1-n)*x2+0.25*(1+n)*x3- 0.25*(1+n)*x4; %dx/de J12 = -0.25*(1-n)*y1+0.25*(1-n)*y2+0.25*(1+n)*y3- 0.25*(1+n)*y4; %dy/de J21 = -0.25*(1-e)*x1- 0.25*(1+e)*x2+0.25*(1+e)*x3+0.25*(1-e)*x4;%dx/dn J22 = -0.25*(1-e)*y1- 0.25*(1+e)*y2+0.25*(1+e)*y3+0.25*(1-e)*y4;%dy/dn J = [J11 J12; J21 J22];
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
213
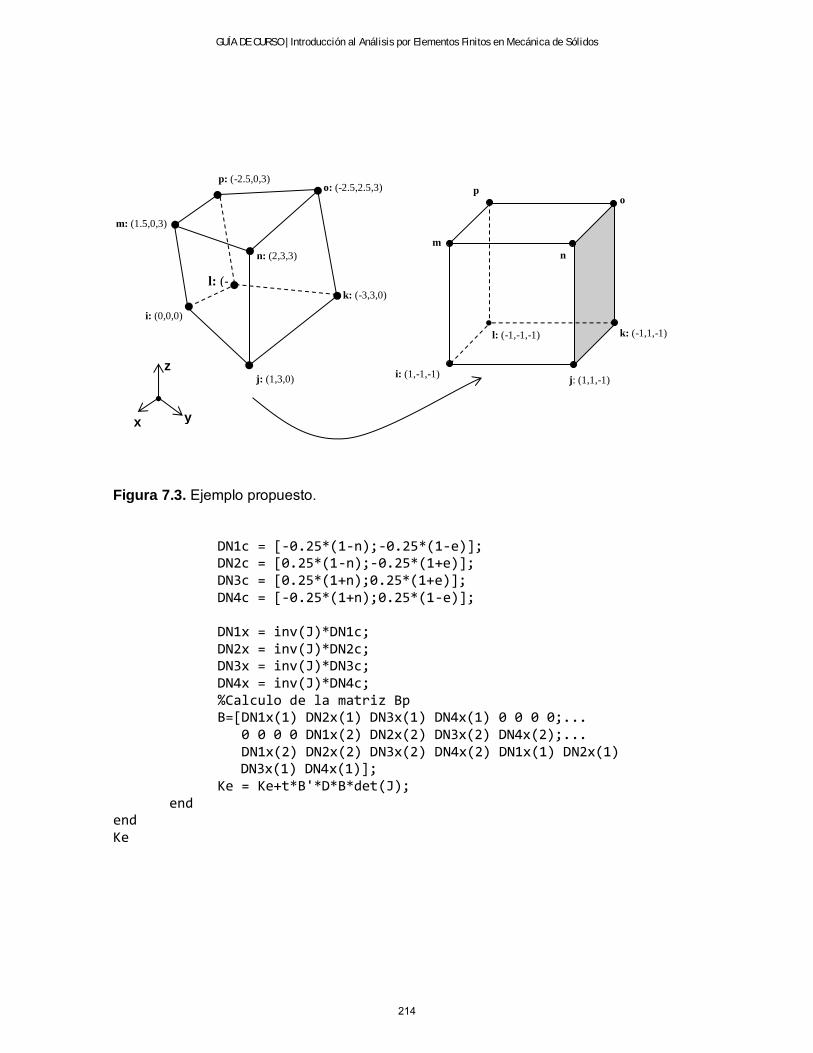
Figura 7.3. Ejemplo propuesto. DN1c = [-0.25*(1-n);-0.25*(1-e)]; DN2c = [0.25*(1-n);-0.25*(1+e)]; DN3c = [0.25*(1+n);0.25*(1+e)]; DN4c = [-0.25*(1+n);0.25*(1-e)]; DN1x = inv(J)*DN1c; DN2x = inv(J)*DN2c; DN3x = inv(J)*DN3c; DN4x = inv(J)*DN4c; %Calculo de la matriz Bp B=[DN1x(1) DN2x(1) DN3x(1) DN4x(1) 0 0 0 0;... 0 0 0 0 DN1x(2) DN2x(2) DN3x(2) DN4x(2);... DN1x(2) DN2x(2) DN3x(2) DN4x(2) DN1x(1) DN2x(1) DN3x(1) DN4x(1)]; Ke = Ke+t*B'*D*B*det(J); end end Ke
j: (1,3,0)
i: (0,0,0)
k: (-3,3,0)
l: (-2,0,0)
m: (1.5,0,3)
n: (2,3,3)
o: (-2.5,2.5,3) p: (-2.5,0,3)
y x
z
n
m
l: (-1,-1,-1)
k: (-1,1,-1)
j: (1,1,-1)
i: (1,-1,-1)
o p
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
214
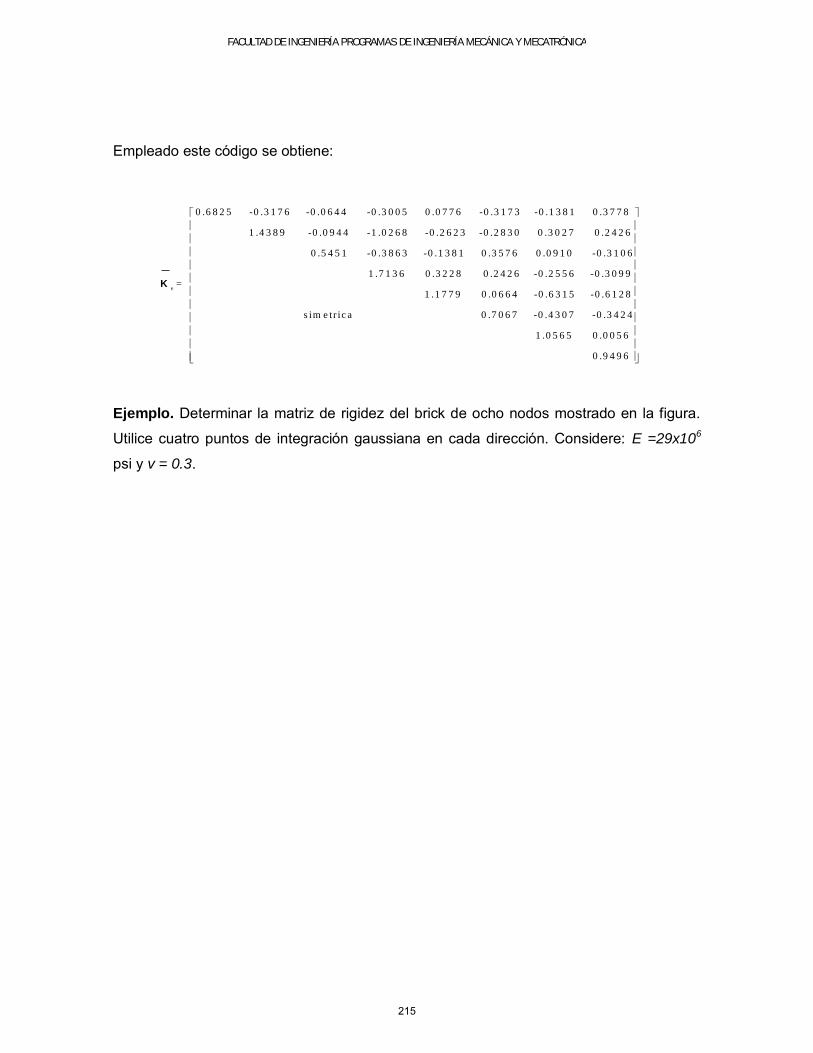
e
0 .6 8 2 5 -0 .3 1 7 6 -0 .0 6 4 4 -0 .3 0 0 5 0 .0 7 7 6 -0 .3 1 7 3 -0 .1 3 8 1 0 .3 7 7 8
1 .4 3 8 9 -0 .0 9 4 4 -1 .0 2 6 8 -0 .2 6 2 3 -0 .2 8 3 0 0 .3 0 2 7 0 .2 4 2 6
0 .5 4 5 1 -0 .3 8 6 3 -0 .1 3 8 1 0 .3 5 7 6 0 .0 9 1 0 -0 .3 1 0 6
1 .7 1 3 6 0 .3 2 2 8 0 .2 4 2 6 -0 .2 5 5 6 -0 .3 0 9 9=
1 .1 7 7 9 0 .0 6 6 4 -0 .6 3 1 5K
-0 .6 1 2 8
s im e tr ic a 0 .7 0 6 7 -0 .4 3 0 7 -0 .3 4 2 4
1 .0 5 6 5 0 .0 0 5 6
0 .9 4 9 6
Ejemplo. Determinar la matriz de rigidez del brick de ocho nodos mostrado en la figura.
Utilice cuatro puntos de integración gaussiana en cada dirección. Considere: E =29x106
psi y v = 0.3.
Empleado este código se obtiene:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
215

Capitulo 8.
Implementación Computacional
8.1 Introducción
En este capitulo consideraremos algunos de los aspectos relativos al desarrollo de los
programas para computador para cálculo por elementos finitos que utilizan la teoría
presentada en los capítulos anteriores. El programa de cálculo que se presenta puede ser
empleado para analizar armaduras planas. Está desarrollado en MATLAB 6.1 y puede ser
fácilmente adaptado para analizar marcos planos e incluso estructuras tridimensionales.
La implementación computacional del proceso de análisis por elementos finitos expuesto,
se realiza a través el análisis de una armadura plana utilizando el programa “TRUSS”, es
cual es analizado, a través de una explicación sencilla de cada uno de los módulos y
submodulos que lo constituyen. El programa está estructurado en tres módulos básicos:
modulo de preprocesamiento, modulo de solución y modulo de postproceso, siguiendo la
estructura tradicional de los códigos computacionales para análisis por elementos finitos.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
217
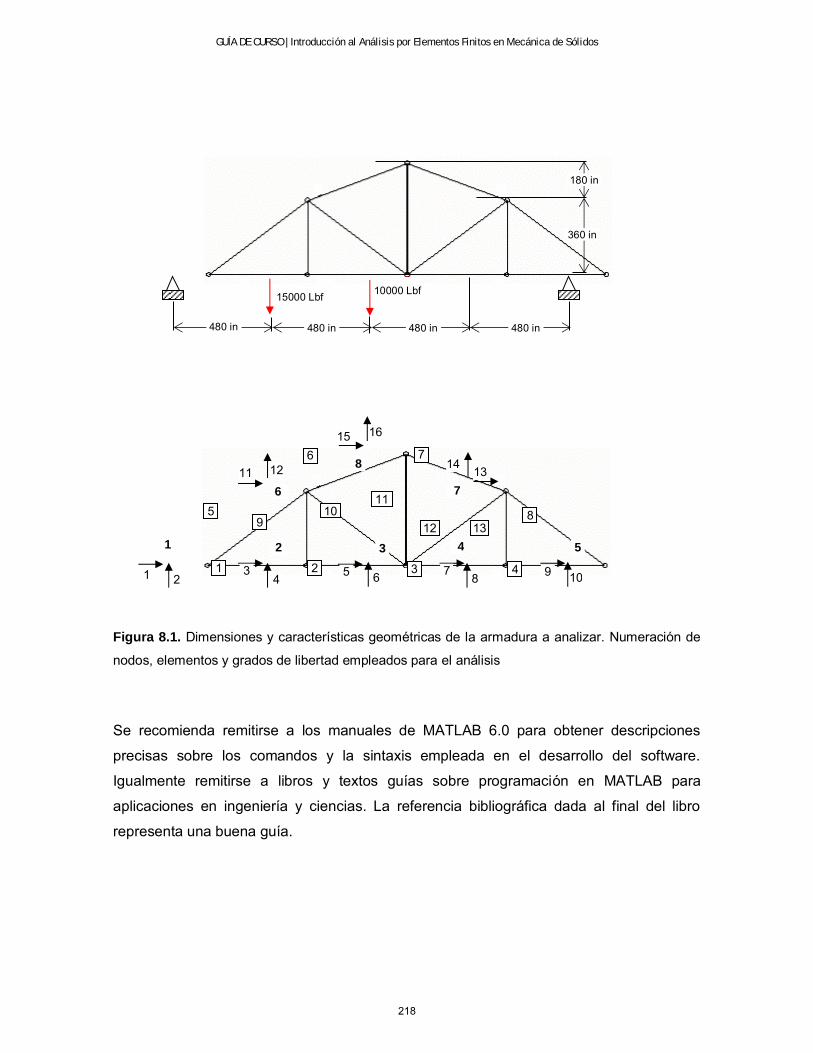
Figura 8.1. Dimensiones y características geométricas de la armadura a analizar. Numeración de
nodos, elementos y grados de libertad empleados para el análisis
Se recomienda remitirse a los manuales de MATLAB 6.0 para obtener descripciones
precisas sobre los comandos y la sintaxis empleada en el desarrollo del software.
Igualmente remitirse a libros y textos guías sobre programación en MATLAB para
aplicaciones en ingeniería y ciencias. La referencia bibliográfica dada al final del libro
representa una buena guía.
360 in
180 in
480 in 480 in 480 in 480 in
15000 Lbf 10000 Lbf
1 2 3
4 5
6 7
8 9
10
11 12 13 14
15 16
4 3 2 1
5
6 7
8 9
10 11
12 13
1 2 3 4 5
6 7
8
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
218
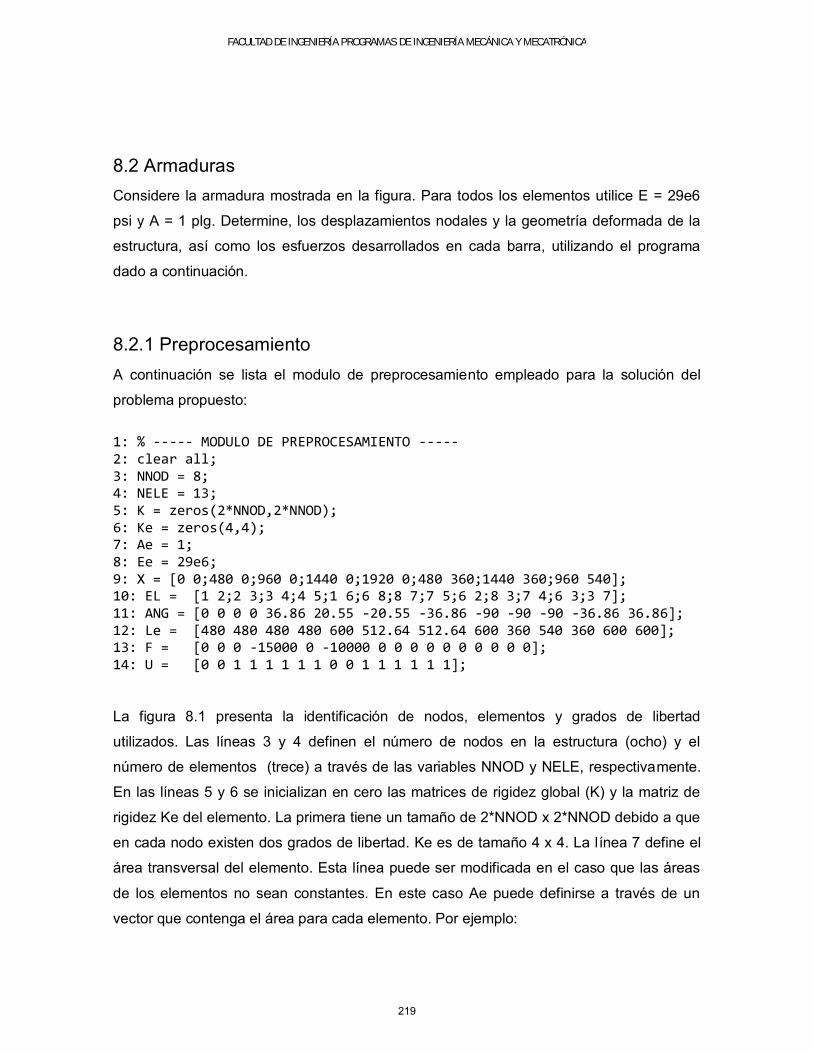
8.2 Armaduras
Considere la armadura mostrada en la figura. Para todos los elementos utilice E = 29e6
psi y A = 1 plg. Determine, los desplazamientos nodales y la geometría deformada de la
estructura, así como los esfuerzos desarrollados en cada barra, utilizando el programa
dado a continuación.
8.2.1 Preprocesamiento
A continuación se lista el modulo de preprocesamiento empleado para la solución del
problema propuesto:
1: % ----- MODULO DE PREPROCESAMIENTO ----- 2: clear all; 3: NNOD = 8; 4: NELE = 13; 5: K = zeros(2*NNOD,2*NNOD); 6: Ke = zeros(4,4); 7: Ae = 1; 8: Ee = 29e6; 9: X = [0 0;480 0;960 0;1440 0;1920 0;480 360;1440 360;960 540]; 10: EL = [1 2;2 3;3 4;4 5;1 6;6 8;8 7;7 5;6 2;8 3;7 4;6 3;3 7]; 11: ANG = [0 0 0 0 36.86 20.55 -20.55 -36.86 -90 -90 -90 -36.86 36.86]; 12: Le = [480 480 480 480 600 512.64 512.64 600 360 540 360 600 600]; 13: F = [0 0 0 -15000 0 -10000 0 0 0 0 0 0 0 0 0 0]; 14: U = [0 0 1 1 1 1 1 1 0 0 1 1 1 1 1 1]; La figura 8.1 presenta la identificación de nodos, elementos y grados de libertad
utilizados. Las líneas 3 y 4 definen el número de nodos en la estructura (ocho) y el
número de elementos (trece) a través de las variables NNOD y NELE, respectivamente.
En las líneas 5 y 6 se inicializan en cero las matrices de rigidez global (K) y la matriz de
rigidez Ke del elemento. La primera tiene un tamaño de 2*NNOD x 2*NNOD debido a que
en cada nodo existen dos grados de libertad. Ke es de tamaño 4 x 4. La línea 7 define el
área transversal del elemento. Esta línea puede ser modificada en el caso que las áreas
de los elementos no sean constantes. En este caso Ae puede definirse a través de un
vector que contenga el área para cada elemento. Por ejemplo:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
219
Ae = [1.0 1.5 2.5 2.3 3.0 3.3 1.2 1.4 1.0 3.0 1.8 2.8 1.5];
La fila 8 define el modulo elástico del material. Nuevamente en este caso su valor es igual
para todos los elementos. En el caso de no serlo puede definirse un vector (tal como se
hizo para el caso de las áreas de los elementos) para definir el modulo elástico para cada
elemento.
En la fila 9 se define la matriz X, la cual contiene las coordenadas nodales. La primera
columna de la matriz representa la coordenada X y la segunda columna la coordenada Y
para cada nodo. El valor de la fila en esta matriz representa el número del nodo. Así por
ejemplo las coordenadas del nodo 7, X = 120 y Y = 30, se encuentran ubicadas en la fila 7
de esta matriz.
La línea 10 define los elementos a través de la interconexión de los nodos en la matriz EL.
Nuevamente, el número de la fila en esta matriz identifica el número del elemento. El nodo
i del elemento es ubicado en la primera columna y el nodo j es ubicado en la segunda
columna. Así por ejemplo el elemento 10, definido por los nodos i = 6 y j = 3, se encuentra
ubicado en la fila 10 de la matriz EL.
En la fila 11 se define el vector ANG que contiene los ángulos de dirección para cada
elemento con eje global “x”. La generación de este vector puede hacerse
automáticamente a partir de las coordenadas nodales definidas en el vector X y la matriz
de conectividad EL, a través del calculo de estos ángulos para cada elemento. Lo mismo
podría realizarse para el cálculo de la longitud de cada elemento, las cuales se
encuentran contenidas en el vector Le presentado en la línea 12.
En las líneas 13 y 14 se escriben los vectores U y F. El primero contiene los grados de
libertad (GDL) conocidos (representados por ceros) y grados de libertad desconocidos
(unos). El vector F contiene las cargas aplicadas en los nodos.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
220
El modulo presentado es uno entre muchos que pueden escribirse. De hecho es, casi el
más sencillo. En general los módulos de preprocesamiento contiene instrucciones para
leer un archivo de texto (archivo de entrada del modelo) donde se encuentra contenida
toda la información del modelo: coordenadas nodales, definición de elementos,
propiedades del material y de sección transversal, grados de libertad restringidos, cargas
aplicadas y otros aspectos. Igualmente, son módulos que automáticamente calculan la
longitud de elementos y ángulos de dirección. Los módulos de preprocesamiento mas
avanzados poseen módulos CAD para generar la geometría del modelo y adicional
grados de libertad y cargas aplicadas. A partir de este modelo, el código automáticamente
genera el archivo de entrada del modelo. De esta manera es como trabajan los códigos
comerciales para modelamiento numérico por elementos finitos, tales como ANSYS,
ABAQUS, ALGOR y otros. Aunque también estos tienen la opción para que el usuario
escriba el archivo de entrada, lo cual es necesario para el desarrollo de ciertos modelos,
tales como en el análisis de problemas de optimización en ANSYS.
8.2.2 Modulo de Solución
A partir de los datos de entrada dados en el modulo de pre-procesamiento, el modulo de
solución construye las matrices de rigidez para cada elementos para luego armar la matriz
global y el sistema global de ecuaciones empleando para ello la matriz de conectividad B.
El modulo de solución, en general se encuentra dividido en varios submodulos:
- Armado de matriz global
- Reducción de matriz global
- Solución del sistema reducido
- Armado de vector se solución U
8.2.2.1 Armado de matriz global. El submodulo de armado de la matriz global inicia con
la definición de la matriz de conectividad B, continúa con el cálculo de las matrices de
rigidez para cada elementos ke y finaliza con el armado de la matriz global de rigidez K. a
continuación se presenta el modulo desarrollado para el análisis del problema propuesto:
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
221
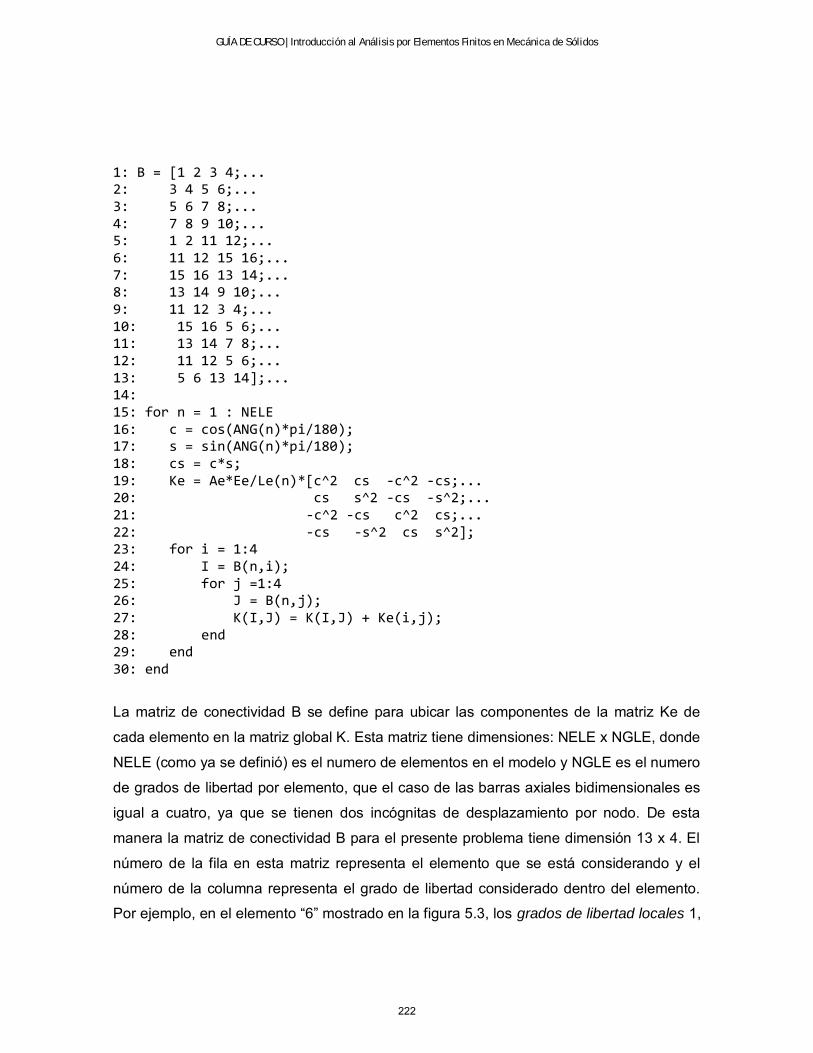
1: B = [1 2 3 4;... 2: 3 4 5 6;... 3: 5 6 7 8;... 4: 7 8 9 10;... 5: 1 2 11 12;... 6: 11 12 15 16;... 7: 15 16 13 14;... 8: 13 14 9 10;... 9: 11 12 3 4;... 10: 15 16 5 6;... 11: 13 14 7 8;... 12: 11 12 5 6;... 13: 5 6 13 14];... 14: 15: for n = 1 : NELE 16: c = cos(ANG(n)*pi/180); 17: s = sin(ANG(n)*pi/180); 18: cs = c*s; 19: Ke = Ae*Ee/Le(n)*[c^2 cs -c^2 -cs;... 20: cs s^2 -cs -s^2;... 21: -c^2 -cs c^2 cs;... 22: -cs -s^2 cs s^2]; 23: for i = 1:4 24: I = B(n,i); 25: for j =1:4 26: J = B(n,j); 27: K(I,J) = K(I,J) + Ke(i,j); 28: end 29: end 30: end
La matriz de conectividad B se define para ubicar las componentes de la matriz Ke de
cada elemento en la matriz global K. Esta matriz tiene dimensiones: NELE x NGLE, donde
NELE (como ya se definió) es el numero de elementos en el modelo y NGLE es el numero
de grados de libertad por elemento, que el caso de las barras axiales bidimensionales es
igual a cuatro, ya que se tienen dos incógnitas de desplazamiento por nodo. De esta
manera la matriz de conectividad B para el presente problema tiene dimensión 13 x 4. El
número de la fila en esta matriz representa el elemento que se está considerando y el
número de la columna representa el grado de libertad considerado dentro del elemento.
Por ejemplo, en el elemento “6” mostrado en la figura 5.3, los grados de libertad locales 1,
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
222

2, 3 y 4 (o sea: 1 1 2 2
, , ,x y x y
u u u u ) corresponden a los grados de libertad globales 11, 12, 15 y
16, respectivamente, por lo que en la fila 6 de la matriz B se ubican los números:
Figura 8.2 relación entre los grados de libertad locales y globales (en negrilla).
1 2 3 4
1 1 1 2 1 5 1 6
B
Debemos recordar que la matriz Ke trabaja con grados de libertad locales y la matriz de
rigidez K trabaja con grados de libertad globales. Los elementos de la primera se pueden
ubicar en K empleando la matriz B que conecta los grados de libertad locales con los
grados de libertad globales. Por ejemplo, consideremos la matriz Ke para el elemento “6”:
1 2 3 4
(3) (15)
(2) (12) (1) (11)
(4)
(16)
6
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
223
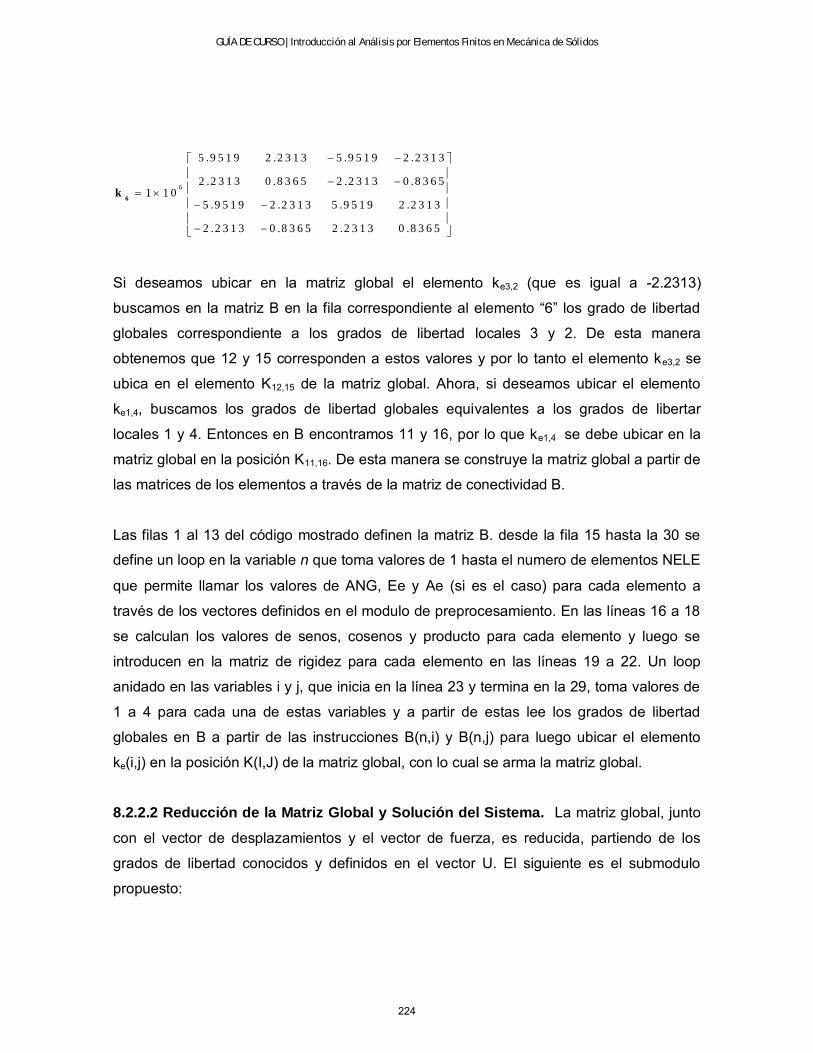
6
5 .9 5 1 9 2 .2 3 1 3 5 .9 5 1 9 2 .2 3 1 3
2 .2 3 1 3 0 .8 3 6 5 2 .2 3 1 3 0 .8 3 6 51 1 0
5 .9 5 1 9 2 .2 3 1 3 5 .9 5 1 9 2 .2 3 1 3
2 .2 3 1 3 0 .8 3 6 5 2 .2 3 1 3 0 .8 3 6 5
6k
Si deseamos ubicar en la matriz global el elemento ke3,2 (que es igual a -2.2313)
buscamos en la matriz B en la fila correspondiente al elemento “6” los grado de libertad
globales correspondiente a los grados de libertad locales 3 y 2. De esta manera
obtenemos que 12 y 15 corresponden a estos valores y por lo tanto el elemento ke3,2 se
ubica en el elemento K12,15 de la matriz global. Ahora, si deseamos ubicar el elemento
ke1,4, buscamos los grados de libertad globales equivalentes a los grados de libertar
locales 1 y 4. Entonces en B encontramos 11 y 16, por lo que ke1,4 se debe ubicar en la
matriz global en la posición K11,16. De esta manera se construye la matriz global a partir de
las matrices de los elementos a través de la matriz de conectividad B.
Las filas 1 al 13 del código mostrado definen la matriz B. desde la fila 15 hasta la 30 se
define un loop en la variable n que toma valores de 1 hasta el numero de elementos NELE
que permite llamar los valores de ANG, Ee y Ae (si es el caso) para cada elemento a
través de los vectores definidos en el modulo de preprocesamiento. En las líneas 16 a 18
se calculan los valores de senos, cosenos y producto para cada elemento y luego se
introducen en la matriz de rigidez para cada elemento en las líneas 19 a 22. Un loop
anidado en las variables i y j, que inicia en la línea 23 y termina en la 29, toma valores de
1 a 4 para cada una de estas variables y a partir de estas lee los grados de libertad
globales en B a partir de las instrucciones B(n,i) y B(n,j) para luego ubicar el elemento
ke(i,j) en la posición K(I,J) de la matriz global, con lo cual se arma la matriz global.
8.2.2.2 Reducción de la Matriz Global y Solución del Sistema. La matriz global, junto
con el vector de desplazamientos y el vector de fuerza, es reducida, partiendo de los
grados de libertad conocidos y definidos en el vector U. El siguiente es el submodulo
propuesto:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
224
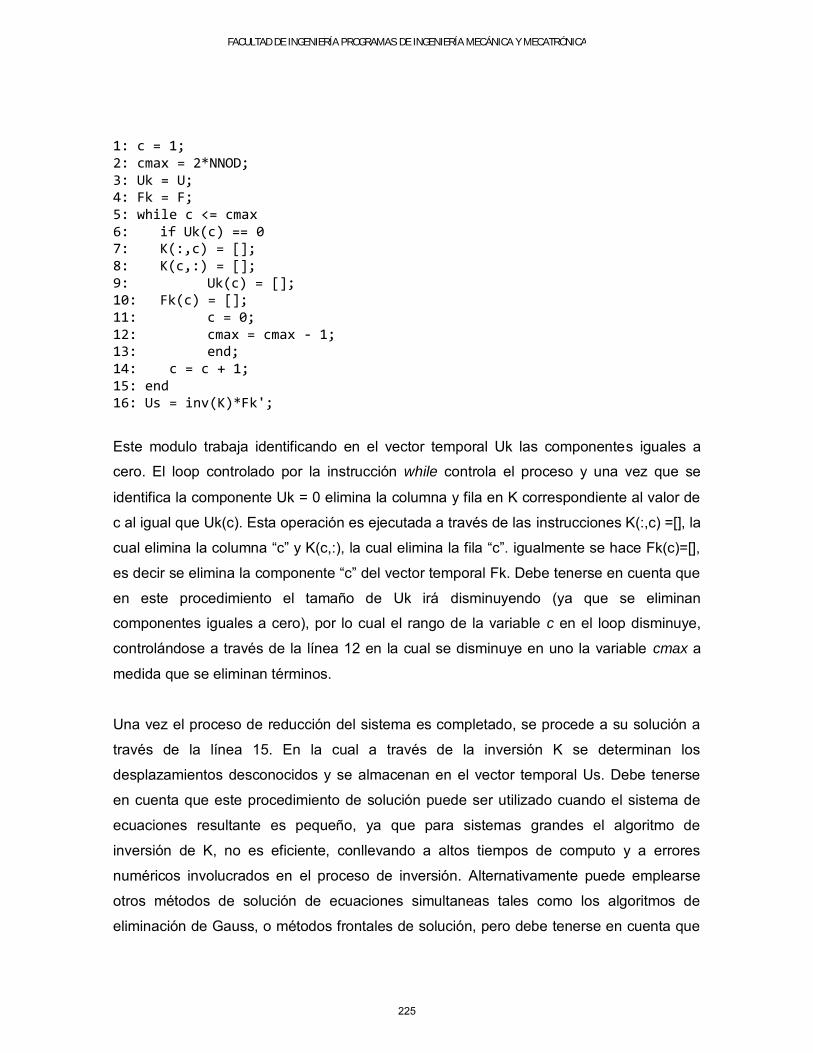
1: c = 1; 2: cmax = 2*NNOD; 3: Uk = U; 4: Fk = F; 5: while c <= cmax 6: if Uk(c) == 0 7: K(:,c) = []; 8: K(c,:) = []; 9: Uk(c) = []; 10: Fk(c) = []; 11: c = 0; 12: cmax = cmax - 1; 13: end; 14: c = c + 1; 15: end 16: Us = inv(K)*Fk'; Este modulo trabaja identificando en el vector temporal Uk las componentes iguales a
cero. El loop controlado por la instrucción while controla el proceso y una vez que se
identifica la componente Uk = 0 elimina la columna y fila en K correspondiente al valor de
c al igual que Uk(c). Esta operación es ejecutada a través de las instrucciones K(:,c) =[], la
cual elimina la columna “c” y K(c,:), la cual elimina la fila “c”. igualmente se hace Fk(c)=[],
es decir se elimina la componente “c” del vector temporal Fk. Debe tenerse en cuenta que
en este procedimiento el tamaño de Uk irá disminuyendo (ya que se eliminan
componentes iguales a cero), por lo cual el rango de la variable c en el loop disminuye,
controlándose a través de la línea 12 en la cual se disminuye en uno la variable cmax a
medida que se eliminan términos.
Una vez el proceso de reducción del sistema es completado, se procede a su solución a
través de la línea 15. En la cual a través de la inversión K se determinan los
desplazamientos desconocidos y se almacenan en el vector temporal Us. Debe tenerse
en cuenta que este procedimiento de solución puede ser utilizado cuando el sistema de
ecuaciones resultante es pequeño, ya que para sistemas grandes el algoritmo de
inversión de K, no es eficiente, conllevando a altos tiempos de computo y a errores
numéricos involucrados en el proceso de inversión. Alternativamente puede emplearse
otros métodos de solución de ecuaciones simultaneas tales como los algoritmos de
eliminación de Gauss, o métodos frontales de solución, pero debe tenerse en cuenta que
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
225
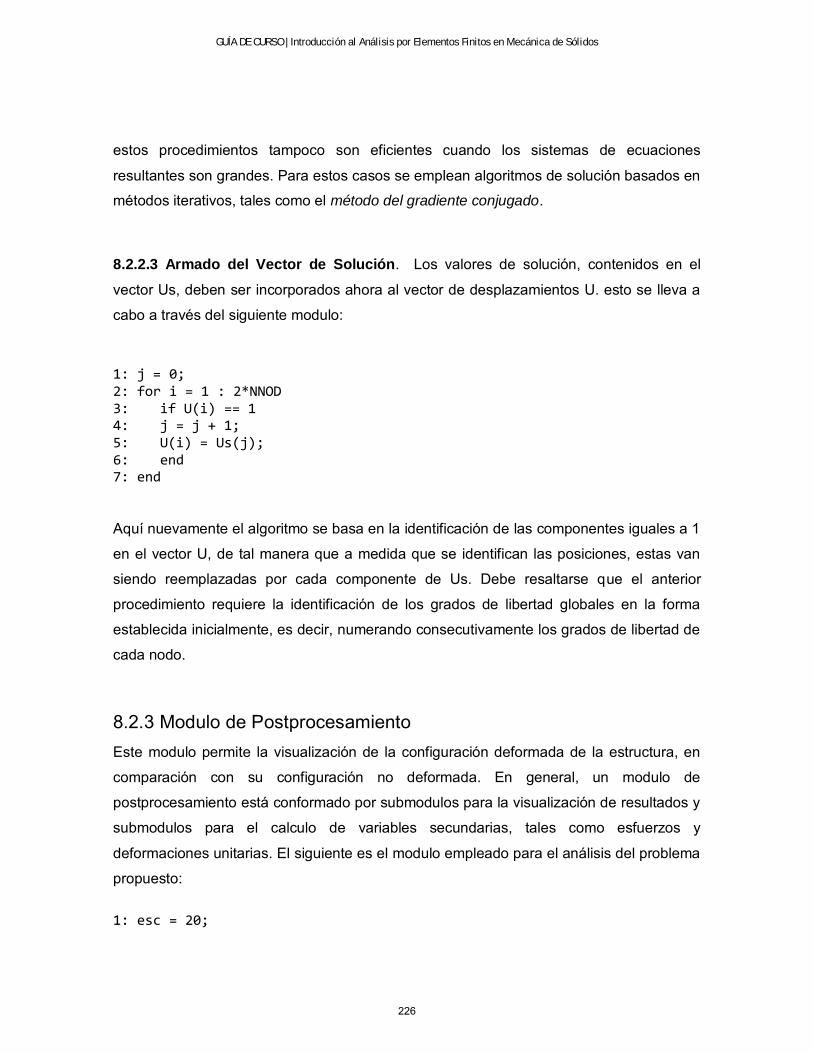
estos procedimientos tampoco son eficientes cuando los sistemas de ecuaciones
resultantes son grandes. Para estos casos se emplean algoritmos de solución basados en
métodos iterativos, tales como el método del gradiente conjugado.
8.2.2.3 Armado del Vector de Solución. Los valores de solución, contenidos en el
vector Us, deben ser incorporados ahora al vector de desplazamientos U. esto se lleva a
cabo a través del siguiente modulo:
1: j = 0; 2: for i = 1 : 2*NNOD 3: if U(i) == 1 4: j = j + 1; 5: U(i) = Us(j); 6: end 7: end Aquí nuevamente el algoritmo se basa en la identificación de las componentes iguales a 1
en el vector U, de tal manera que a medida que se identifican las posiciones, estas van
siendo reemplazadas por cada componente de Us. Debe resaltarse que el anterior
procedimiento requiere la identificación de los grados de libertad globales en la forma
establecida inicialmente, es decir, numerando consecutivamente los grados de libertad de
cada nodo.
8.2.3 Modulo de Postprocesamiento
Este modulo permite la visualización de la configuración deformada de la estructura, en
comparación con su configuración no deformada. En general, un modulo de
postprocesamiento está conformado por submodulos para la visualización de resultados y
submodulos para el calculo de variables secundarias, tales como esfuerzos y
deformaciones unitarias. El siguiente es el modulo empleado para el análisis del problema
propuesto:
1: esc = 20;
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
226
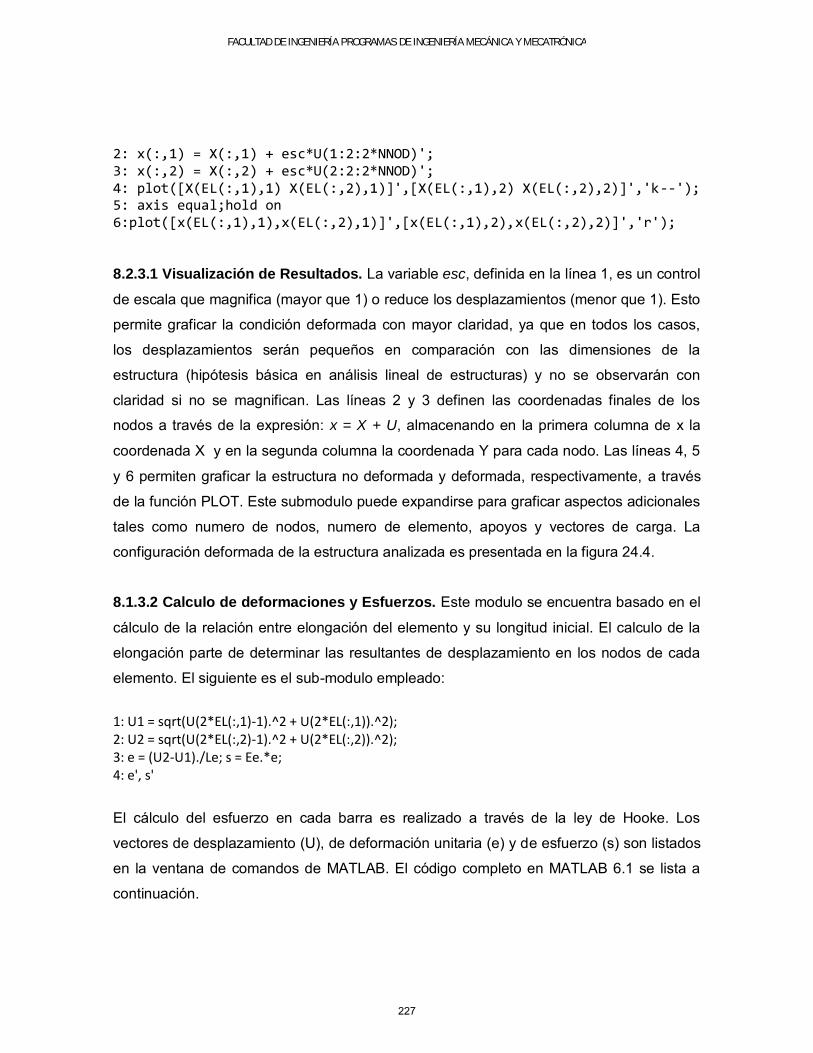
2: x(:,1) = X(:,1) + esc*U(1:2:2*NNOD)'; 3: x(:,2) = X(:,2) + esc*U(2:2:2*NNOD)'; 4: plot([X(EL(:,1),1) X(EL(:,2),1)]',[X(EL(:,1),2) X(EL(:,2),2)]','k--'); 5: axis equal;hold on 6:plot([x(EL(:,1),1),x(EL(:,2),1)]',[x(EL(:,1),2),x(EL(:,2),2)]','r'); 8.2.3.1 Visualización de Resultados. La variable esc, definida en la línea 1, es un control
de escala que magnifica (mayor que 1) o reduce los desplazamientos (menor que 1). Esto
permite graficar la condición deformada con mayor claridad, ya que en todos los casos,
los desplazamientos serán pequeños en comparación con las dimensiones de la
estructura (hipótesis básica en análisis lineal de estructuras) y no se observarán con
claridad si no se magnifican. Las líneas 2 y 3 definen las coordenadas finales de los
nodos a través de la expresión: x = X + U, almacenando en la primera columna de x la
coordenada X y en la segunda columna la coordenada Y para cada nodo. Las líneas 4, 5
y 6 permiten graficar la estructura no deformada y deformada, respectivamente, a través
de la función PLOT. Este submodulo puede expandirse para graficar aspectos adicionales
tales como numero de nodos, numero de elemento, apoyos y vectores de carga. La
configuración deformada de la estructura analizada es presentada en la figura 24.4.
8.1.3.2 Calculo de deformaciones y Esfuerzos. Este modulo se encuentra basado en el
cálculo de la relación entre elongación del elemento y su longitud inicial. El calculo de la
elongación parte de determinar las resultantes de desplazamiento en los nodos de cada
elemento. El siguiente es el sub-modulo empleado:
1: U1 = sqrt(U(2*EL(:,1)-1).^2 + U(2*EL(:,1)).^2); 2: U2 = sqrt(U(2*EL(:,2)-1).^2 + U(2*EL(:,2)).^2); 3: e = (U2-U1)./Le; s = Ee.*e; 4: e', s'
El cálculo del esfuerzo en cada barra es realizado a través de la ley de Hooke. Los
vectores de desplazamiento (U), de deformación unitaria (e) y de esfuerzo (s) son listados
en la ventana de comandos de MATLAB. El código completo en MATLAB 6.1 se lista a
continuación.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
227
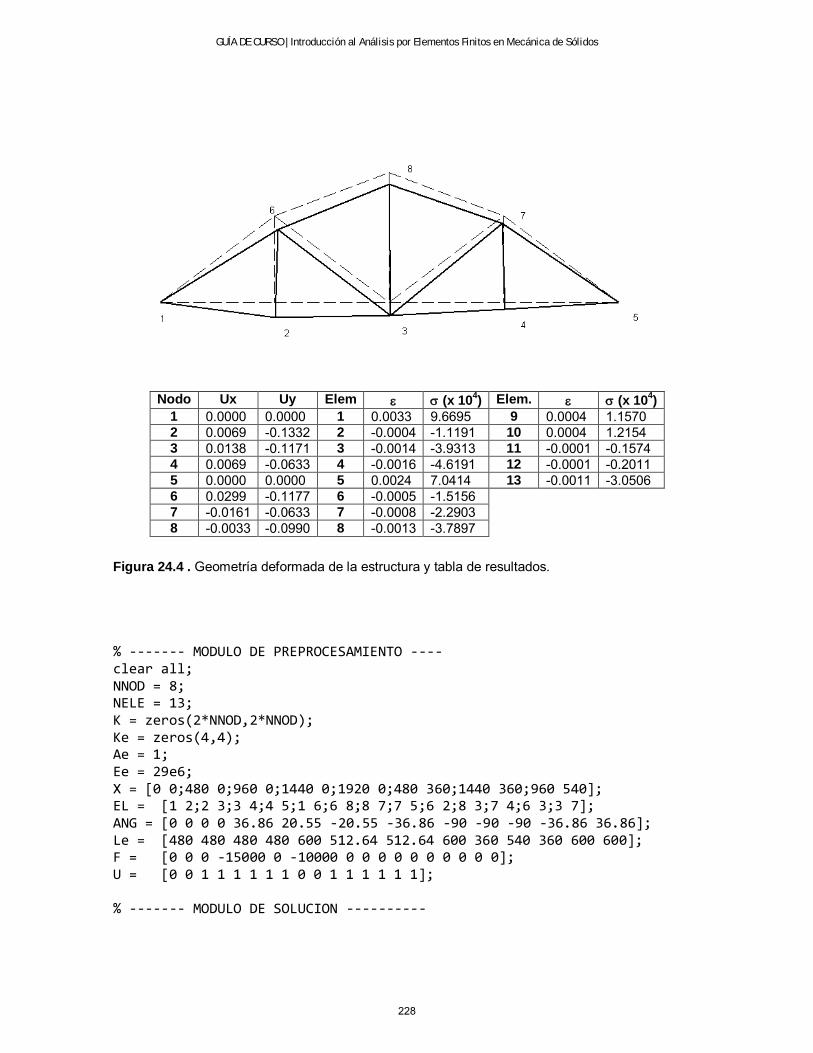
Nodo Ux Uy Elem (x 104) Elem. (x 10
4)
1 0.0000 0.0000 1 0.0033 9.6695 9 0.0004 1.1570 2 0.0069 -0.1332 2 -0.0004 -1.1191 10 0.0004 1.2154 3 0.0138 -0.1171 3 -0.0014 -3.9313 11 -0.0001 -0.1574 4 0.0069 -0.0633 4 -0.0016 -4.6191 12 -0.0001 -0.2011 5 0.0000 0.0000 5 0.0024 7.0414 13 -0.0011 -3.0506 6 0.0299 -0.1177 6 -0.0005 -1.5156 7 -0.0161 -0.0633 7 -0.0008 -2.2903 8 -0.0033 -0.0990 8 -0.0013 -3.7897
Figura 24.4 . Geometría deformada de la estructura y tabla de resultados.
% ------- MODULO DE PREPROCESAMIENTO ---- clear all; NNOD = 8; NELE = 13; K = zeros(2*NNOD,2*NNOD); Ke = zeros(4,4); Ae = 1; Ee = 29e6; X = [0 0;480 0;960 0;1440 0;1920 0;480 360;1440 360;960 540]; EL = [1 2;2 3;3 4;4 5;1 6;6 8;8 7;7 5;6 2;8 3;7 4;6 3;3 7]; ANG = [0 0 0 0 36.86 20.55 -20.55 -36.86 -90 -90 -90 -36.86 36.86]; Le = [480 480 480 480 600 512.64 512.64 600 360 540 360 600 600]; F = [0 0 0 -15000 0 -10000 0 0 0 0 0 0 0 0 0 0]; U = [0 0 1 1 1 1 1 1 0 0 1 1 1 1 1 1]; % ------- MODULO DE SOLUCION ----------
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
228
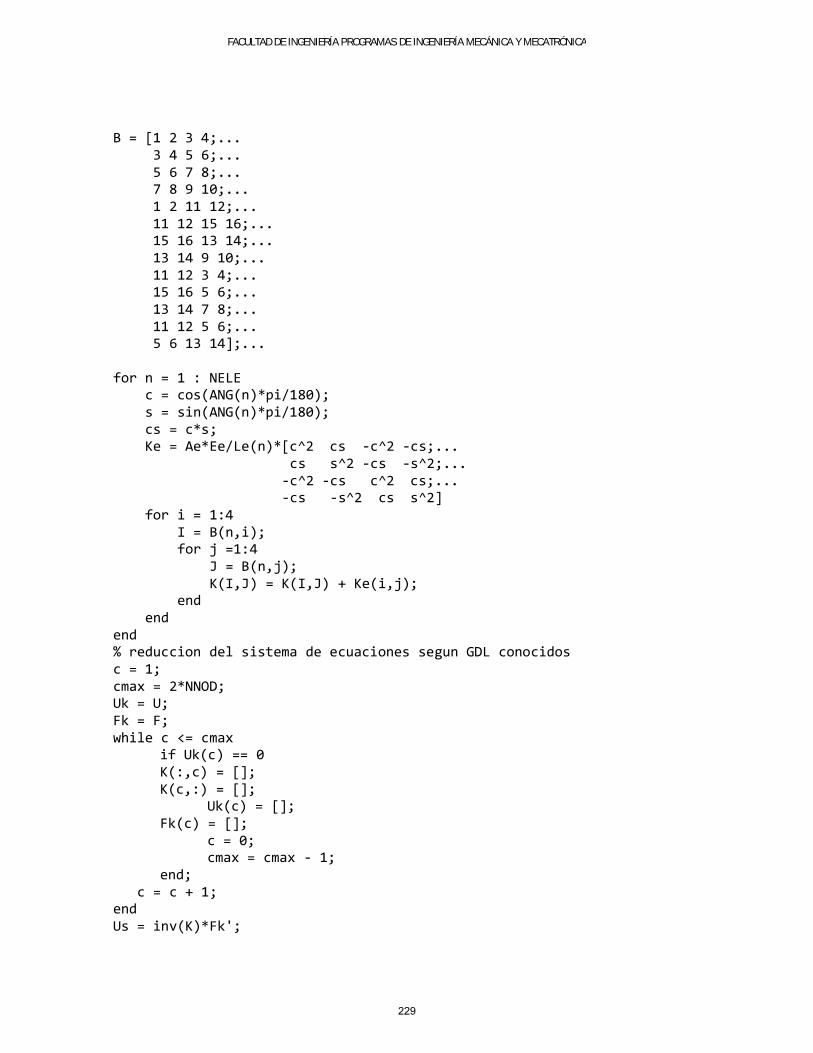
B = [1 2 3 4;... 3 4 5 6;... 5 6 7 8;... 7 8 9 10;... 1 2 11 12;... 11 12 15 16;... 15 16 13 14;... 13 14 9 10;... 11 12 3 4;... 15 16 5 6;... 13 14 7 8;... 11 12 5 6;... 5 6 13 14];... for n = 1 : NELE c = cos(ANG(n)*pi/180); s = sin(ANG(n)*pi/180); cs = c*s; Ke = Ae*Ee/Le(n)*[c^2 cs -c^2 -cs;... cs s^2 -cs -s^2;... -c^2 -cs c^2 cs;... -cs -s^2 cs s^2] for i = 1:4 I = B(n,i); for j =1:4 J = B(n,j); K(I,J) = K(I,J) + Ke(i,j); end end end % reduccion del sistema de ecuaciones segun GDL conocidos c = 1; cmax = 2*NNOD; Uk = U; Fk = F; while c <= cmax if Uk(c) == 0 K(:,c) = []; K(c,:) = []; Uk(c) = []; Fk(c) = []; c = 0; cmax = cmax - 1; end; c = c + 1; end Us = inv(K)*Fk';
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
229
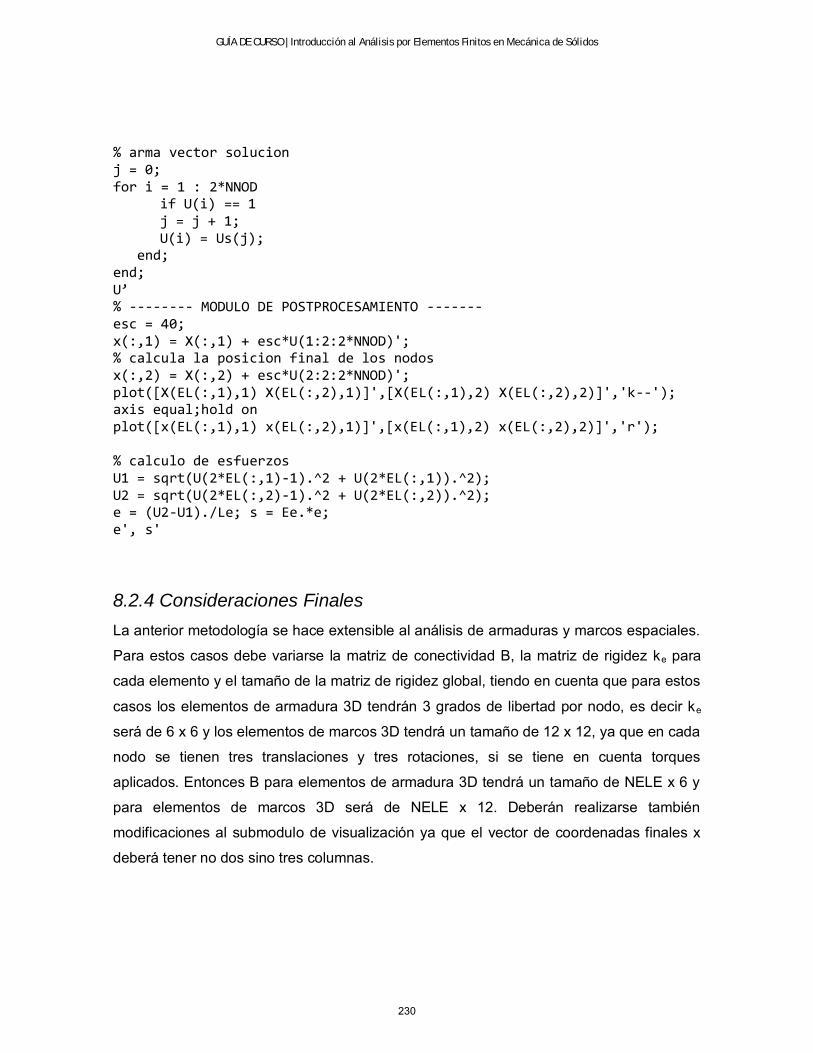
% arma vector solucion j = 0; for i = 1 : 2*NNOD if U(i) == 1 j = j + 1; U(i) = Us(j); end; end; U’ % -------- MODULO DE POSTPROCESAMIENTO ------- esc = 40; x(:,1) = X(:,1) + esc*U(1:2:2*NNOD)'; % calcula la posicion final de los nodos x(:,2) = X(:,2) + esc*U(2:2:2*NNOD)'; plot([X(EL(:,1),1) X(EL(:,2),1)]',[X(EL(:,1),2) X(EL(:,2),2)]','k--'); axis equal;hold on plot([x(EL(:,1),1) x(EL(:,2),1)]',[x(EL(:,1),2) x(EL(:,2),2)]','r'); % calculo de esfuerzos U1 = sqrt(U(2*EL(:,1)-1).^2 + U(2*EL(:,1)).^2); U2 = sqrt(U(2*EL(:,2)-1).^2 + U(2*EL(:,2)).^2); e = (U2-U1)./Le; s = Ee.*e; e', s'
8.2.4 Consideraciones Finales
La anterior metodología se hace extensible al análisis de armaduras y marcos espaciales.
Para estos casos debe variarse la matriz de conectividad B, la matriz de rigidez ke para
cada elemento y el tamaño de la matriz de rigidez global, tiendo en cuenta que para estos
casos los elementos de armadura 3D tendrán 3 grados de libertad por nodo, es decir ke
será de 6 x 6 y los elementos de marcos 3D tendrá un tamaño de 12 x 12, ya que en cada
nodo se tienen tres translaciones y tres rotaciones, si se tiene en cuenta torques
aplicados. Entonces B para elementos de armadura 3D tendrá un tamaño de NELE x 6 y
para elementos de marcos 3D será de NELE x 12. Deberán realizarse también
modificaciones al submodulo de visualización ya que el vector de coordenadas finales x
deberá tener no dos sino tres columnas.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
230
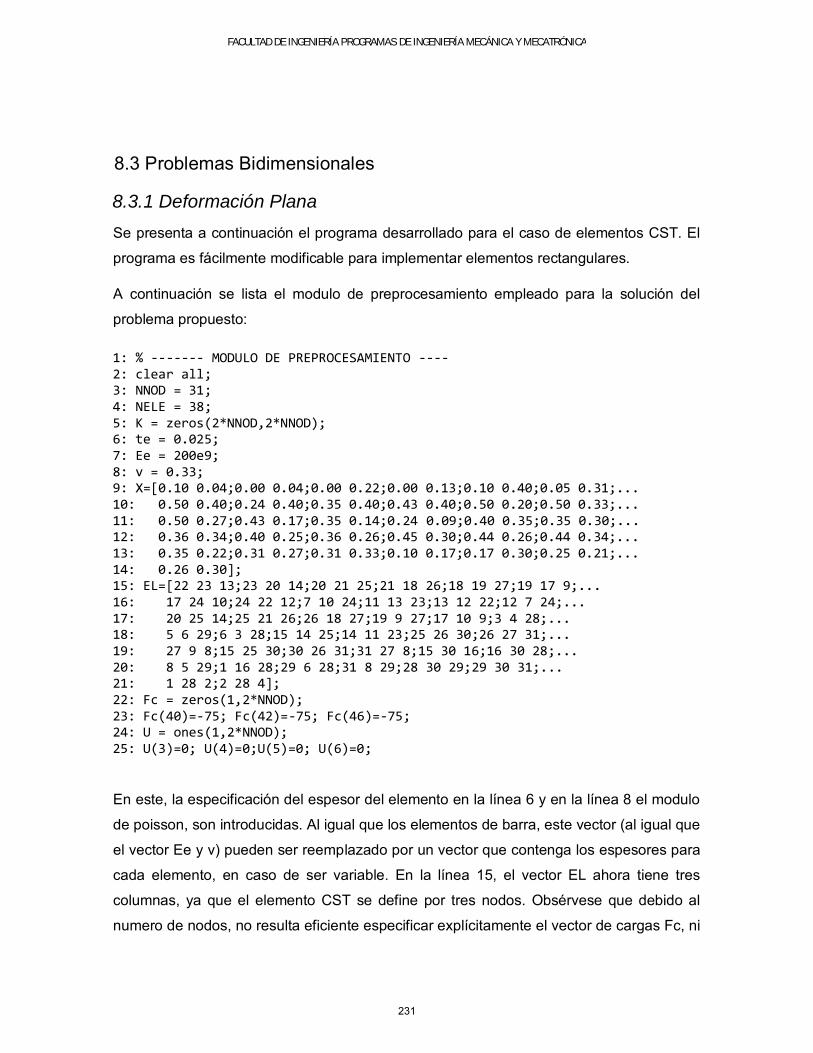
8.3.1 Deformación Plana
Se presenta a continuación el programa desarrollado para el caso de elementos CST. El
programa es fácilmente modificable para implementar elementos rectangulares.
A continuación se lista el modulo de preprocesamiento empleado para la solución del
problema propuesto: 1: % ------- MODULO DE PREPROCESAMIENTO ---- 2: clear all; 3: NNOD = 31; 4: NELE = 38; 5: K = zeros(2*NNOD,2*NNOD); 6: te = 0.025; 7: Ee = 200e9; 8: v = 0.33; 9: X=[0.10 0.04;0.00 0.04;0.00 0.22;0.00 0.13;0.10 0.40;0.05 0.31;... 10: 0.50 0.40;0.24 0.40;0.35 0.40;0.43 0.40;0.50 0.20;0.50 0.33;... 11: 0.50 0.27;0.43 0.17;0.35 0.14;0.24 0.09;0.40 0.35;0.35 0.30;... 12: 0.36 0.34;0.40 0.25;0.36 0.26;0.45 0.30;0.44 0.26;0.44 0.34;... 13: 0.35 0.22;0.31 0.27;0.31 0.33;0.10 0.17;0.17 0.30;0.25 0.21;... 14: 0.26 0.30]; 15: EL=[22 23 13;23 20 14;20 21 25;21 18 26;18 19 27;19 17 9;... 16: 17 24 10;24 22 12;7 10 24;11 13 23;13 12 22;12 7 24;... 17: 20 25 14;25 21 26;26 18 27;19 9 27;17 10 9;3 4 28;... 18: 5 6 29;6 3 28;15 14 25;14 11 23;25 26 30;26 27 31;... 19: 27 9 8;15 25 30;30 26 31;31 27 8;15 30 16;16 30 28;... 20: 8 5 29;1 16 28;29 6 28;31 8 29;28 30 29;29 30 31;... 21: 1 28 2;2 28 4]; 22: Fc = zeros(1,2*NNOD); 23: Fc(40)=-75; Fc(42)=-75; Fc(46)=-75; 24: U = ones(1,2*NNOD); 25: U(3)=0; U(4)=0;U(5)=0; U(6)=0; En este, la especificación del espesor del elemento en la línea 6 y en la línea 8 el modulo
de poisson, son introducidas. Al igual que los elementos de barra, este vector (al igual que
el vector Ee y v) pueden ser reemplazado por un vector que contenga los espesores para
cada elemento, en caso de ser variable. En la línea 15, el vector EL ahora tiene tres
columnas, ya que el elemento CST se define por tres nodos. Obsérvese que debido al
numero de nodos, no resulta eficiente especificar explícitamente el vector de cargas Fc, ni
8.3 Problemas Bidimensionales
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
231
el vector U de desplazamientos conocidos. En este caso, estos vectores son inicializados
en cero (para el caso de Fc) y en unos (para el caso de U), a través de los comandos
ZEROS y ONES. Una vez realizado esto, los grados de libertad conocidos dentro de cada
uno de estos vectores son indicados explícitamente. Por ejemplo, la carga de -75N
aplicada en dirección y en el nodo 23, debe ser ubicada en el grado de libertad 46, es
decir: Fc(46)=-75. de igual forma se procede para especificar los grados de libertad
conocidos (“ceros”) en el vector U.
Por otra parte, en el modulo de solución, la construcción de la definición de la matriz de
interconectividad BC, se realiza igualmente de forma automática, debido al gran numero
de elementos que se tiene. Este procedimiento resulta sencillo si se adopta la numeración
de los grados de libertad empleada en el capitulo cinco. Observamos de allí que el
número de nodo y los grados de libertad en él se relacionan por las expresiones:
2 1
2
G D L x N u m N O D
G D L y N u m N O D
(8.1)
Donde GDL es el grado de libertad en dirección “x” o “y” y NumNOD representa el
numero del nodo. Por ejemplo. Para el ubicar un desplazamiento igual a cero en el grado
de libertad “y” del nodo 4 se hace:
GDLy = 2*4 = 8
Es decir, en el grado de libertad 8 del vector U debe ubicarse “0”. De esta manera, la
matriz BC puede armarse de forma automática, ya que solo debe identificarse los nodos
para cada elemento y aplicar las ecuaciones (6.26). por ejemplo, los grados globales para
el elemento 5 son (utilizando la expresión del programa):
BC = [2*EL(5,1)-1 2*EL(5,1) 2*EL(5,2)-1 2*EL(5,2) 2*EL(5,3)-1- 2*EL(5,3)];
Con lo cual se obtiene para el elemento 5, a partir de la matriz EL:
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
232
BC = [35 36 37 38 53 54]
Por otra parte, otra variación importante en este modulo, la representa el calculo de la
matriz de rigidez del elemento CST a partir de las constantes A…J. estas son calculadas
a partir de las coordenadas nodales, las cuales son determinadas a partir de la expresión
general:
X(EL(Num.Elemento,1…3),1..2)
En la cual Num.Elemento es el número del elemento y los valores 1...3 se refieren a los
nodos i, j, k, respectivamente. 1 representa la coordenada x, y 2 representa la coordenada
y. Por ejemplo, supongamos que estamos interesados en determinar la coordenada x del
nodo k del elemento 2. Para obtener esta coordenada, debemos primero determinar el
nodo k del elemento 2. Sabemos que este lo encontramos en la fila 2 y columna 3 de la
matriz de interconexión EL, de esta manera:
j = EL(2,3)
Entonces la coordenada y para este nodo la encontramos en la fila j , columna 1 de la
matriz X:
y = X(j,1)
Las operaciones anteriores pueden ser unidas en la expresión general:
y = X(EL(2,2),1)
De esta manera se arman las constantes A…J y a partir de ellas se determinan las
componentes de la matriz Ke.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
233
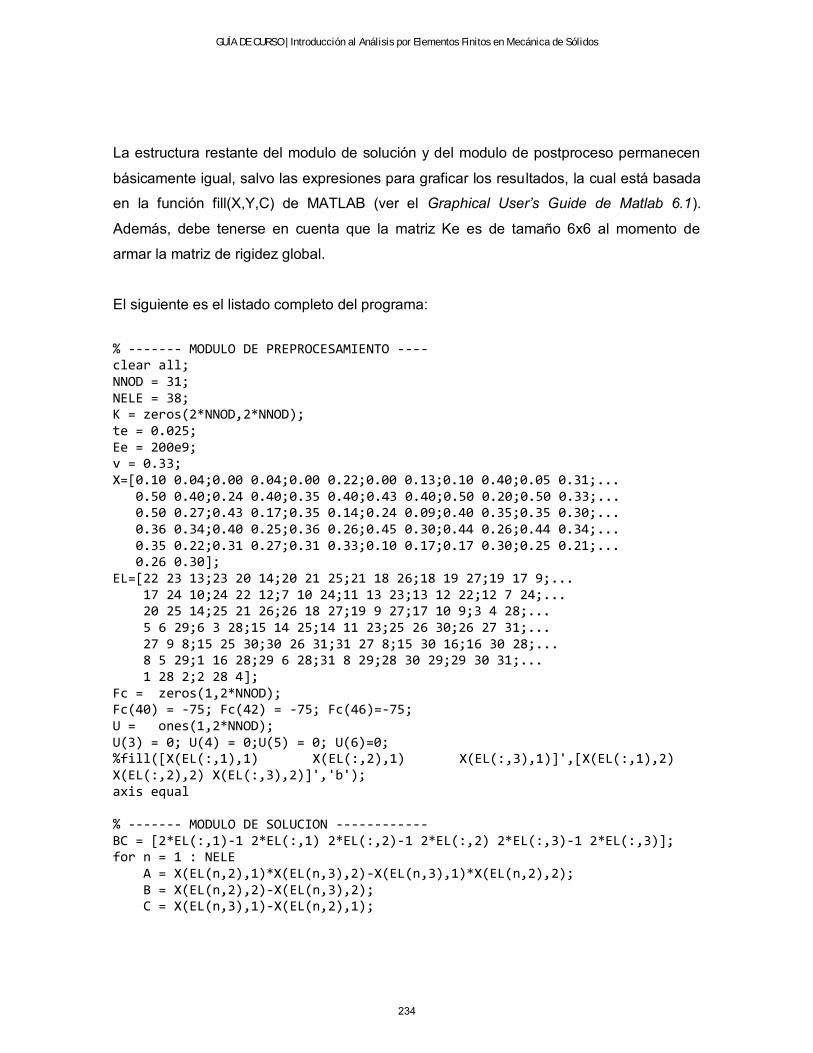
La estructura restante del modulo de solución y del modulo de postproceso permanecen
básicamente igual, salvo las expresiones para graficar los resultados, la cual está basada
en la función fill(X,Y,C) de MATLAB (ver el Graphical User’s Guide de Matlab 6.1).
Además, debe tenerse en cuenta que la matriz Ke es de tamaño 6x6 al momento de
armar la matriz de rigidez global.
El siguiente es el listado completo del programa:
% ------- MODULO DE PREPROCESAMIENTO ---- clear all; NNOD = 31; NELE = 38; K = zeros(2*NNOD,2*NNOD); te = 0.025; Ee = 200e9; v = 0.33; X=[0.10 0.04;0.00 0.04;0.00 0.22;0.00 0.13;0.10 0.40;0.05 0.31;... 0.50 0.40;0.24 0.40;0.35 0.40;0.43 0.40;0.50 0.20;0.50 0.33;... 0.50 0.27;0.43 0.17;0.35 0.14;0.24 0.09;0.40 0.35;0.35 0.30;... 0.36 0.34;0.40 0.25;0.36 0.26;0.45 0.30;0.44 0.26;0.44 0.34;... 0.35 0.22;0.31 0.27;0.31 0.33;0.10 0.17;0.17 0.30;0.25 0.21;... 0.26 0.30]; EL=[22 23 13;23 20 14;20 21 25;21 18 26;18 19 27;19 17 9;... 17 24 10;24 22 12;7 10 24;11 13 23;13 12 22;12 7 24;... 20 25 14;25 21 26;26 18 27;19 9 27;17 10 9;3 4 28;... 5 6 29;6 3 28;15 14 25;14 11 23;25 26 30;26 27 31;... 27 9 8;15 25 30;30 26 31;31 27 8;15 30 16;16 30 28;... 8 5 29;1 16 28;29 6 28;31 8 29;28 30 29;29 30 31;... 1 28 2;2 28 4]; Fc = zeros(1,2*NNOD); Fc(40) = -75; Fc(42) = -75; Fc(46)=-75; U = ones(1,2*NNOD); U(3) = 0; U(4) = 0;U(5) = 0; U(6)=0; %fill([X(EL(:,1),1) X(EL(:,2),1) X(EL(:,3),1)]',[X(EL(:,1),2) X(EL(:,2),2) X(EL(:,3),2)]','b'); axis equal % ------- MODULO DE SOLUCION ------------ BC = [2*EL(:,1)-1 2*EL(:,1) 2*EL(:,2)-1 2*EL(:,2) 2*EL(:,3)-1 2*EL(:,3)]; for n = 1 : NELE A = X(EL(n,2),1)*X(EL(n,3),2)-X(EL(n,3),1)*X(EL(n,2),2); B = X(EL(n,2),2)-X(EL(n,3),2); C = X(EL(n,3),1)-X(EL(n,2),1);
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
234
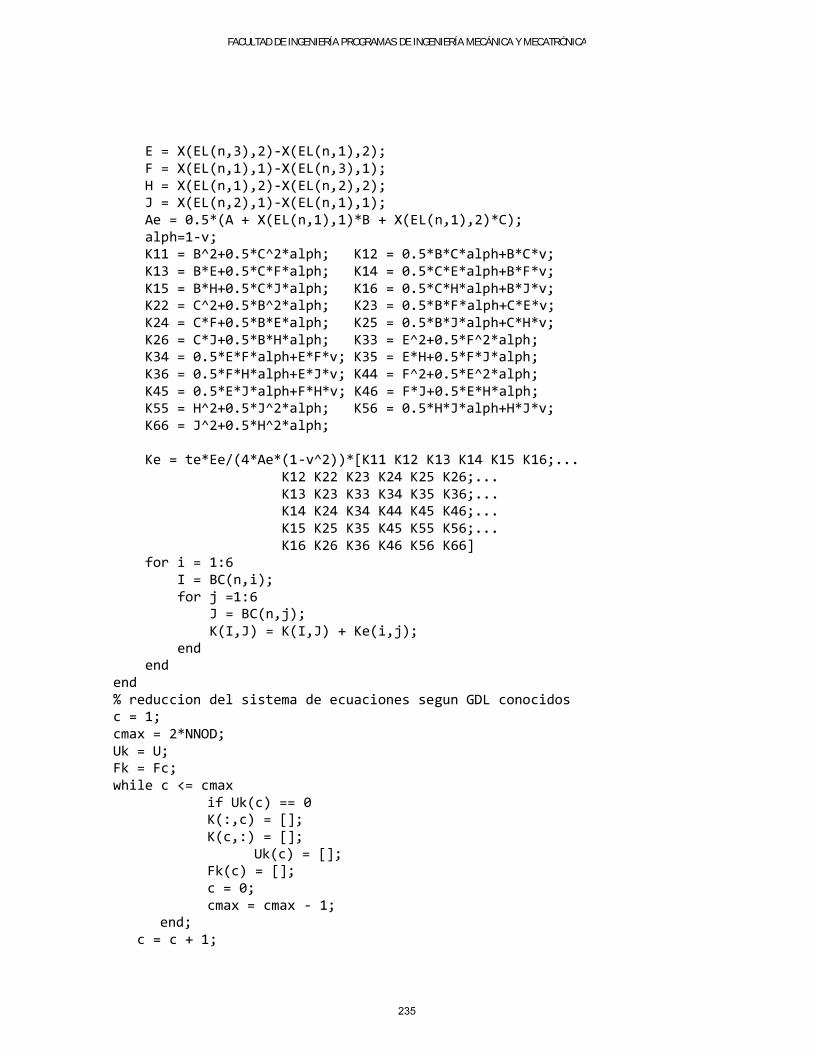
E = X(EL(n,3),2)-X(EL(n,1),2); F = X(EL(n,1),1)-X(EL(n,3),1); H = X(EL(n,1),2)-X(EL(n,2),2); J = X(EL(n,2),1)-X(EL(n,1),1); Ae = 0.5*(A + X(EL(n,1),1)*B + X(EL(n,1),2)*C); alph=1-v; K11 = B^2+0.5*C^2*alph; K12 = 0.5*B*C*alph+B*C*v; K13 = B*E+0.5*C*F*alph; K14 = 0.5*C*E*alph+B*F*v; K15 = B*H+0.5*C*J*alph; K16 = 0.5*C*H*alph+B*J*v; K22 = C^2+0.5*B^2*alph; K23 = 0.5*B*F*alph+C*E*v; K24 = C*F+0.5*B*E*alph; K25 = 0.5*B*J*alph+C*H*v; K26 = C*J+0.5*B*H*alph; K33 = E^2+0.5*F^2*alph; K34 = 0.5*E*F*alph+E*F*v; K35 = E*H+0.5*F*J*alph; K36 = 0.5*F*H*alph+E*J*v; K44 = F^2+0.5*E^2*alph; K45 = 0.5*E*J*alph+F*H*v; K46 = F*J+0.5*E*H*alph; K55 = H^2+0.5*J^2*alph; K56 = 0.5*H*J*alph+H*J*v; K66 = J^2+0.5*H^2*alph; Ke = te*Ee/(4*Ae*(1-v^2))*[K11 K12 K13 K14 K15 K16;... K12 K22 K23 K24 K25 K26;... K13 K23 K33 K34 K35 K36;... K14 K24 K34 K44 K45 K46;... K15 K25 K35 K45 K55 K56;... K16 K26 K36 K46 K56 K66] for i = 1:6 I = BC(n,i); for j =1:6 J = BC(n,j); K(I,J) = K(I,J) + Ke(i,j); end end end % reduccion del sistema de ecuaciones segun GDL conocidos c = 1; cmax = 2*NNOD; Uk = U; Fk = Fc; while c <= cmax if Uk(c) == 0 K(:,c) = []; K(c,:) = []; Uk(c) = []; Fk(c) = []; c = 0; cmax = cmax - 1; end; c = c + 1;
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
235
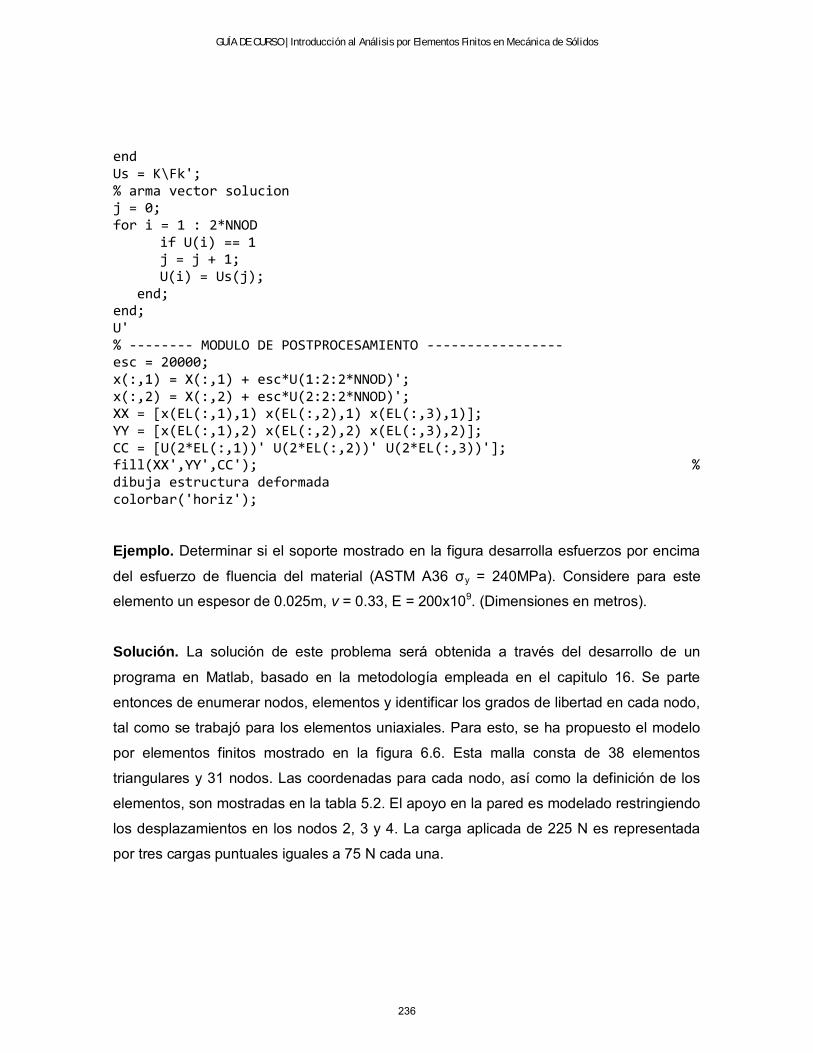
end Us = K\Fk'; % arma vector solucion j = 0; for i = 1 : 2*NNOD if U(i) == 1 j = j + 1; U(i) = Us(j); end; end; U' % -------- MODULO DE POSTPROCESAMIENTO ----------------- esc = 20000; x(:,1) = X(:,1) + esc*U(1:2:2*NNOD)'; x(:,2) = X(:,2) + esc*U(2:2:2*NNOD)'; XX = [x(EL(:,1),1) x(EL(:,2),1) x(EL(:,3),1)]; YY = [x(EL(:,1),2) x(EL(:,2),2) x(EL(:,3),2)]; CC = [U(2*EL(:,1))' U(2*EL(:,2))' U(2*EL(:,3))']; fill(XX',YY',CC'); % dibuja estructura deformada colorbar('horiz'); Ejemplo. Determinar si el soporte mostrado en la figura desarrolla esfuerzos por encima
del esfuerzo de fluencia del material (ASTM A36 σy = 240MPa). Considere para este
elemento un espesor de 0.025m, v = 0.33, E = 200x109. (Dimensiones en metros).
Solución. La solución de este problema será obtenida a través del desarrollo de un
programa en Matlab, basado en la metodología empleada en el capitulo 16. Se parte
entonces de enumerar nodos, elementos y identificar los grados de libertad en cada nodo,
tal como se trabajó para los elementos uniaxiales. Para esto, se ha propuesto el modelo
por elementos finitos mostrado en la figura 6.6. Esta malla consta de 38 elementos
triangulares y 31 nodos. Las coordenadas para cada nodo, así como la definición de los
elementos, son mostradas en la tabla 5.2. El apoyo en la pared es modelado restringiendo
los desplazamientos en los nodos 2, 3 y 4. La carga aplicada de 225 N es representada
por tres cargas puntuales iguales a 75 N cada una.
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
236
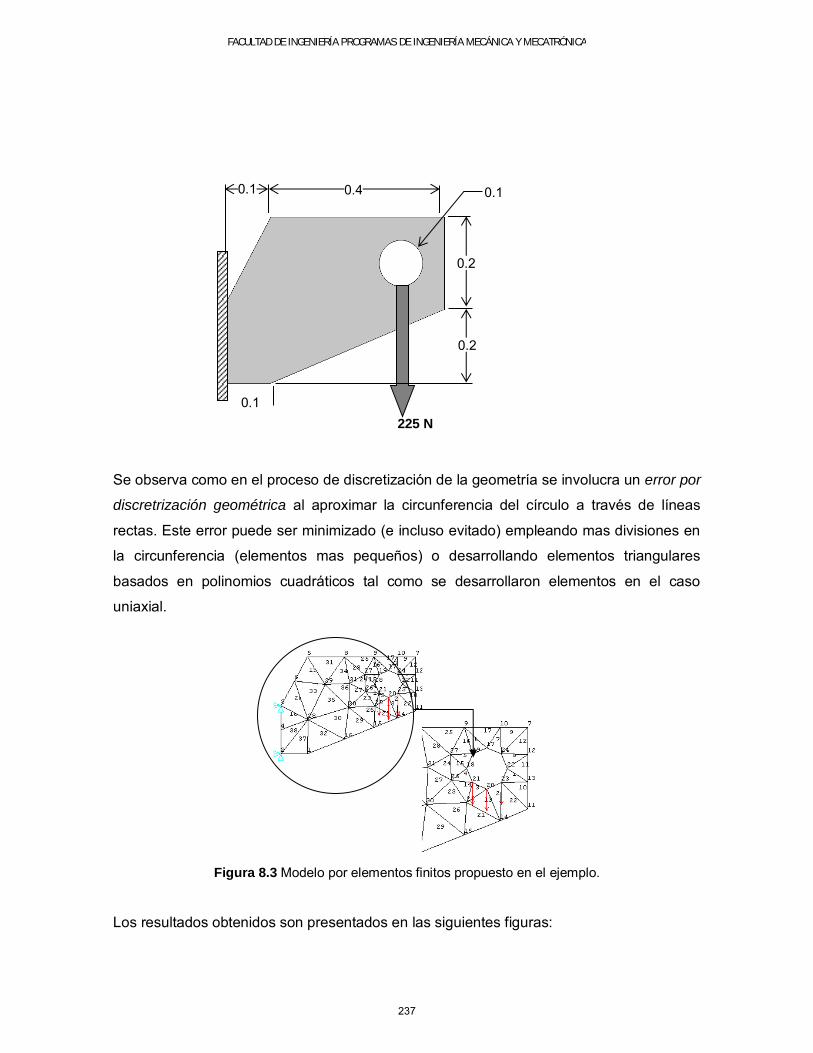
Se observa como en el proceso de discretización de la geometría se involucra un error por
discretrización geométrica al aproximar la circunferencia del círculo a través de líneas
rectas. Este error puede ser minimizado (e incluso evitado) empleando mas divisiones en
la circunferencia (elementos mas pequeños) o desarrollando elementos triangulares
basados en polinomios cuadráticos tal como se desarrollaron elementos en el caso
uniaxial.
Figura 8.3 Modelo por elementos finitos propuesto en el ejemplo.
Los resultados obtenidos son presentados en las siguientes figuras:
0.2
0.4 0.1
0.2
0.1
0.1r
225 N
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
237
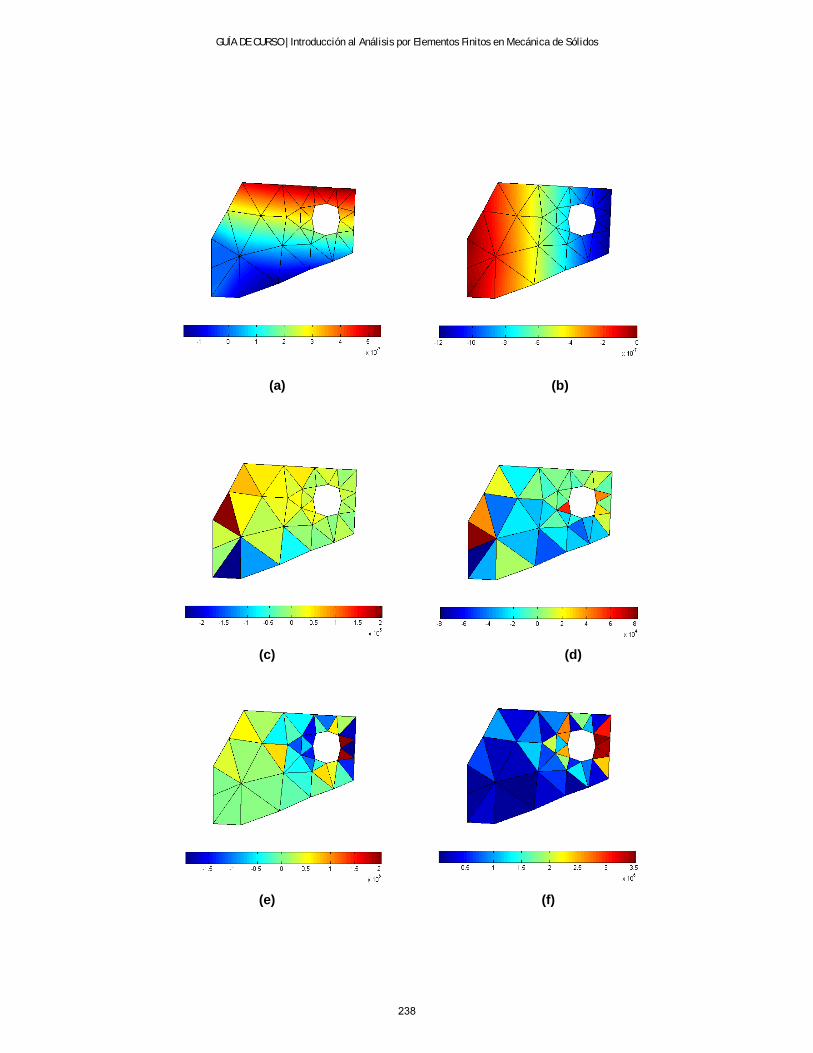
(a) (b)
(c) (d)
(e) (f)
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
238

Figura 8.4. (a) Distribución de desplazamientos u. (b) Distribución de desplazamientos v. (c)
Distribución de esfuerzos σxx. (d) Distribución de esfuerzos normales σyy. (e) Distribución de τxy. (f)
Distribución de esfuerzos de Von Mises.
El cálculo de los esfuerzos al interior de cada elemento puede ser determinadas primero
las deformaciones unitarias, que pueden ser halladas a partir de los polinomios de
interpolación como:
,x x i j k y y i j k
x y i j k i j k
u vB u E u H u C v F v J v
x y
u vC u F u J u B v E v H v
y x
(8.3)
Las figuras 8.4 (c) a (f) calculan estos esfuerzos. Se observa en estas graficas como el
campo de esfuerzos no es continuo en todo el cuerpo. Esto es debido a que el elemento
CST predice un campo de esfuerzos constante al interior de cada elemento, por lo que se
presentan discontinuidades en las fronteras entre elementos. De allí el nombre de
elemento CST. Por lo tanto debe tenerse precaución al momento de emplear estos
elementos, ya que, en general, los campos de esfuerzos son continuos, debiendo ser
necesario emplear elementos CST pequeños de tal manera que aproximen de forma
adecuada estos campos.
FACULTAD DE INGENIERÍA PROGRAMAS DE INGENIERÍA MECÁNICA Y MECATRÓNICA
239
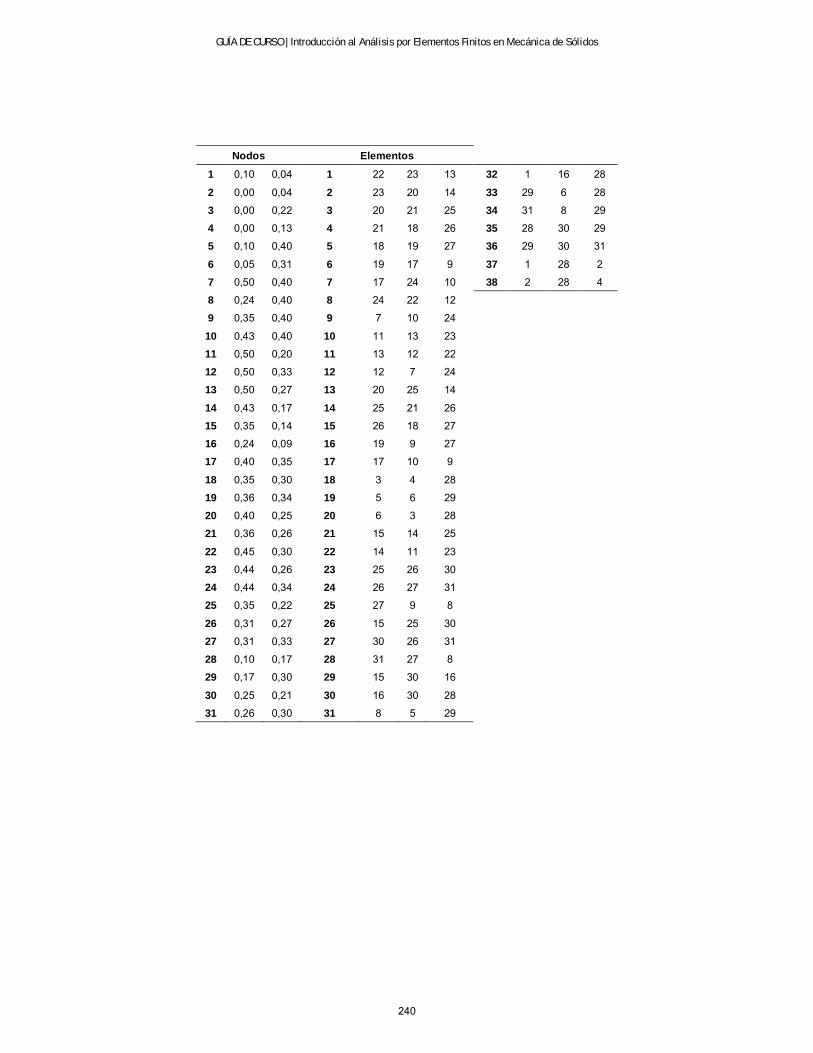
Nodos Elementos
1 0,10 0,04 1 22 23 13 32 1 16 28
2 0,00 0,04 2 23 20 14 33 29 6 28
3 0,00 0,22 3 20 21 25 34 31 8 29
4 0,00 0,13 4 21 18 26 35 28 30 29
5 0,10 0,40 5 18 19 27 36 29 30 31
6 0,05 0,31 6 19 17 9 37 1 28 2
7 0,50 0,40 7 17 24 10 38 2 28 4
8 0,24 0,40 8 24 22 12
9 0,35 0,40 9 7 10 24
10 0,43 0,40 10 11 13 23
11 0,50 0,20 11 13 12 22
12 0,50 0,33 12 12 7 24
13 0,50 0,27 13 20 25 14
14 0,43 0,17 14 25 21 26
15 0,35 0,14 15 26 18 27
16 0,24 0,09 16 19 9 27
17 0,40 0,35 17 17 10 9
18 0,35 0,30 18 3 4 28
19 0,36 0,34 19 5 6 29
20 0,40 0,25 20 6 3 28
21 0,36 0,26 21 15 14 25
22 0,45 0,30 22 14 11 23
23 0,44 0,26 23 25 26 30
24 0,44 0,34 24 26 27 31
25 0,35 0,22 25 27 9 8
26 0,31 0,27 26 15 25 30
27 0,31 0,33 27 30 26 31
28 0,10 0,17 28 31 27 8
29 0,17 0,30 29 15 30 16
30 0,25 0,21 30 16 30 28
31 0,26 0,30 31 8 5 29
GUÍA DE CURSO | Introducción al Análisis por Elementos Finitos en Mecánica de Sólidos
240