Diseño del Aparato - Editorial Amolca Colombia · frecuencia, el enfilado es hecho por las...
4
Introducción Al seleccionar el aparato para el tratamiento ortodóntico en pacientes adultos, es importante reconocer las limitaciones cau- sadas por la pérdida general o local del periodonto debido a la pérdida de dientes y los reemplazos protésicos que deben ser mantenidos. La ausencia de la influencia del crecimiento permi- te, por el contrario, una predicción más exacta del resultado del tratamiento, ya que los movimientos dentarios reflejan los siste- mas de fuerzas aplicados más estrechamente. La dirección y lo- calización de la línea de acción de la fuerza aplicada determina la manera y la dirección en la cual se moverá el diente individual o grupos de dientes. Los únicos factores que repercuten en el resultado del tratamiento son la matriz de tejido blando, el equi- librio entre las matrices musculares, internas y externas, y las fuerzas oclusales. En el paciente adulto, un planeamiento detallado de los movimientos dentarios necesarios en los tres planos del espacio puede llevarse a cabo con un enfilado de diagnóstico en los mo- delos de estudio (Fig. 7.1). La combinación del trazado de la radiografía cefálica y el oclusograma (Fig. 7.1) o un enfilado en modelos virtuales generados a partir de la exploración con escá- ner intraoral, impresiones o modelos de estudio escaneados (Mah y Sachdeva 2001; Sachdeva 2001; Santoro y col. 2001; Vlaskalic y Boyd 2002; Freshwater 2003; Joffe 2003; Santoro y col. 2003; Zilberman y col. 2003; Joffe 2004; Dalstra y Melsen 2009). Con frecuencia, el enfilado es hecho por las compañías de ortodoncia que tiene solamente una interacción mínima con el ortodoncis- ta y sin la información detallada sobre la manera como se logra- rá la oclusión final. El plan de tratamiento y el diseño del apara- to no son separables, puesto que la prescripción o incluso el aparato son provistos con el enfilado. El objetivo del ortodoncis- ta es conseguir una buena oclusión, sin saber la manera como los dientes individuales alcanzarán su posición final. Una analogía sería: ‘Deseo pasar mis vacaciones en la nieve, pero no sé si la agencia de viajes me ha enviado a Mount Cook o a Mont Blanc’. El enfilado, ya sea real o virtual, debe incluir la información sobre el movimiento de cada diente o grupo de dientes en los tres planos del espacio. Si se utiliza la combinación de una radiogra- fía cefálica y un oclusograma o un modelo virtual, los movimien- tos dentarios pueden ser visualizados en los tres planos. Para una Diseño del Aparato Birte Melsen, Giorgio Fiorelli, Delfino Allais, Dimitrios Mavreas 7 Adult Orthodontics, First Edition. Edited by Birte Melsen. © 2012 Blackwell Publising Ltd. Published 2012 by Blackwell Publishing Ltd. Introducción 99 Definición del sistema de fuerzas requerido 100 Evaluación del anclaje 101 Secuencia del tratamiento en fases 103 Anclaje 104 Generación del espacio 104 Posición de la mandíbula 104 Selección y diseño del aparato 105 Aparatos removibles 105 Aparatos fijos 105 Mecánica segmentada 112 Lazos 115 El uso de brazos de potencia 120 Facilidad o dificultad del movimiento dentario 123 Cantiléver 124 Mecánica de dos vectores 127 Conclusión 128 Referencias 129 Mecánica de deslizamiento 108 Resistencia al deslizamiento 108 Sistemas de fuerzas estáticamente determinado e indeterminado 108 Arcos continuos 112
Transcript of Diseño del Aparato - Editorial Amolca Colombia · frecuencia, el enfilado es hecho por las...

IntroducciónAl seleccionar el aparato para el tratamiento ortodóntico en pacientes adultos, es importante reconocer las limitaciones cau-sadas por la pérdida general o local del periodonto debido a la pérdida de dientes y los reemplazos protésicos que deben ser mantenidos. La ausencia de la influencia del crecimiento permi-te, por el contrario, una predicción más exacta del resultado del tratamiento, ya que los movimientos dentarios reflejan los siste-mas de fuerzas aplicados más estrechamente. La dirección y lo-calización de la línea de acción de la fuerza aplicada determina la manera y la dirección en la cual se moverá el diente individual o grupos de dientes. Los únicos factores que repercuten en el resultado del tratamiento son la matriz de tejido blando, el equi-librio entre las matrices musculares, internas y externas, y las fuerzas oclusales. En el paciente adulto, un planeamiento detallado de los movimientos dentarios necesarios en los tres planos del espacio puede llevarse a cabo con un enfilado de diagnóstico en los mo-delos de estudio (Fig. 7.1). La combinación del trazado de la radiografía cefálica y el oclusograma (Fig. 7.1) o un enfilado en
modelos virtuales generados a partir de la exploración con escá-ner intraoral, impresiones o modelos de estudio escaneados (Mah y Sachdeva 2001; Sachdeva 2001; Santoro y col. 2001; Vlaskalic y Boyd 2002; Freshwater 2003; Joffe 2003; Santoro y col. 2003; Zilberman y col. 2003; Joffe 2004; Dalstra y Melsen 2009). Con frecuencia, el enfilado es hecho por las compañías de ortodoncia que tiene solamente una interacción mínima con el ortodoncis-ta y sin la información detallada sobre la manera como se logra-rá la oclusión final. El plan de tratamiento y el diseño del apara-to no son separables, puesto que la prescripción o incluso el aparato son provistos con el enfilado. El objetivo del ortodoncis-ta es conseguir una buena oclusión, sin saber la manera como los dientes individuales alcanzarán su posición final. Una analogía sería: ‘Deseo pasar mis vacaciones en la nieve, pero no sé si la agencia de viajes me ha enviado a Mount Cook o a Mont Blanc’. El enfilado, ya sea real o virtual, debe incluir la información sobre el movimiento de cada diente o grupo de dientes en los tres planos del espacio. Si se utiliza la combinación de una radiogra-fía cefálica y un oclusograma o un modelo virtual, los movimien-tos dentarios pueden ser visualizados en los tres planos. Para una
Diseño del Aparato
Birte Melsen, Giorgio Fiorelli, Delfino Allais, Dimitrios Mavreas
7
Adult Orthodontics, First Edition. Edited by Birte Melsen.© 2012 Blackwell Publising Ltd. Published 2012 by Blackwell Publishing Ltd.
Introducción 99 Definición del sistema de fuerzas requerido 100Evaluación del anclaje 101Secuencia del tratamiento en fases 103 Anclaje 104 Generación del espacio 104 Posición de la mandíbula 104Selección y diseño del aparato 105 Aparatos removibles 105 Aparatos fijos 105
Mecánica segmentada 112 Lazos 115 El uso de brazos de potencia 120 Facilidad o dificultad del movimiento dentario 123 Cantiléver 124 Mecánica de dos vectores 127Conclusión 128Referencias 129Mecánica de deslizamiento 108 Resistencia al deslizamiento 108 Sistemas de fuerzas estáticamente determinado e indeterminado 108 Arcos continuos 112

100 Ortodoncia del Adulto
descripción más detallada, refiérase al Capítulo 5. En relación al movimiento de los dientes en los modelos virtuales, las coorde-nadas deben indicar el desplazamiento.
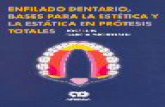
Definición del sistema de fuerzas requeridoUna fuerza que actúa sobre un diente puede representarse como un vector definido en relación a un sistema de coordenadas dado por su magnitud, su punto y línea de aplicación, así como su dirección y orientación (Fig. 7.2). Los movimientos dentarios pueden ser: de traslación, rota-ción o diversas combinaciones de traslación y rotación. Fundada en la línea de acción del vector fuerza, Hocevar (1981, 1987) definió cuatro tipos de movimiento dentario horizontal en el plano sagital (Fig. 7.3). Una fuerza que pasa a través del bracket da lugar a la inclinación incontrolada. Cuando la fuerza pasa por la mitad entre el centro de resistencia (CR) del diente y del brac-ket, el movimiento resultante es una inclinación controlada presunta con el centro de rotación cerca del ápice dental. Una fuerza que pasa a través del CR genera traslación y un mayor desplazamiento apical de la línea de acción de la fuerza que conduce al movimiento radicular con el centro de rotación cerca del borde incisal. Clasificaciones similares del movimiento den-
Fig. 7.2 La fuerza puede ser descrita como un vector en un sistema de coorde-nadas. Cuatro parámetros son necesarios para definir una fuerza: la magnitud es indicada por la longitud de un vector en un sistema de coordenadas con una escala arbitraria. El punto de aplicación de la fuerza y el ángulo de incidencia define la línea de acción de la fuerza. La orientación de la flecha indica su direc-ción, completando así la definición de la fuerza.
80 g
30°
(0.0)
P (–12.8)
X
Y
(2)
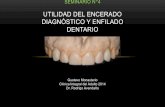
Fig. 7.1 (1) Un enfilado realizado en los modelos de estudio. Observe las coor-denadas dibujadas antes de realizar el movimiento dentario. Esto permite al odontólogo apreciar el movimiento exacto realizado en el enfilado. En este caso se llevaron a cabo la intrusión y retracción de los incisivos superiores. (2) Obje-tivo del tratamiento ilustrado en una combinación de oclusograma y un trazado de la radiografía cefálica. La labioversión y el diastema de los incisivos superio-res serán corregidos mediante la retracción de los cuatro incisivos, sin movi-mientos mayores de otros dientes.
(1)

Diseño del Aparato 101
tario pueden realizarse en otros planos del espacio (Christiansen y Burstone 1969; Kusy y Tulloch 1986). La aplicación de la línea de acción correcta es una precondición para el movimiento dentario bien controlado. En los casos en donde la mayor parte del movimiento dentario previsto va a producirse en un plano del espacio, puede ser suficiente definir la línea de acción en ese plano del espacio particular (Figura 7.4). La localización de la línea de acción en relación al CR del diente o del grupo de dientes de anclaje determinará la contri-bución relativa de traslación y rotación al movimiento total, y determina así el centro de rotación para el movimiento total (Fig. 7.5). La distancia perpendicular del CR a la línea de acción ex-presa la relación momento/fuerza con respecto al CR, por lo tanto, la cantidad relativa de rotación y translación. Un cambio en la relación momento/fuerza puede obtenerse por el desplaza-miento del punto de aplicación de la fuerza o mediante la adición de un momento al bracket (Fig. 7.6). Según las leyes de la física, para cada movimiento dentario existe una línea de acción correcta. Sin embargo, la misma línea de acción puede ser generada por una multiplicidad de aparatos. Para facilitar la estimación del sistema de fuerza necesario para un movimiento específico, se ha desarrollado un programa de computadora, Análisis del Movimiento Dental (AMD), a prin-cipios de los años 1990. Con base en las relaciones entre la loca-lización del centro de rotación y el sistema de fuerza aplicada (Burstone y Pryputniewicz 1980; Burstone 1991), el AMD per-mite simular cualquier movimiento dentario y visualizar la línea de acción requerida con respecto al bracket o al CR (Fiorelli y Melsen 1999; Fiorelli y Melsen 2000). El tipo de movimiento dentario puede ser controlado al variar la relación momento/fuerza para el CR. El análisis holo-gráfico y los exámenes clínicos y radiográficos han sido utilizados para estimar la posición del CR (Burstone y Pryputniewicz 1980).
Sin embargo, las restricciones locales de la función del tejido blando y las diferencias en la calidad del hueso alveolar, también repercuten en la resistencia al movimiento dentario y en conse-cuencia, las diferencias en el nivel de fuerza pueden efectuar la localización del CR (Cattaneo 2003). Mientras que el tipo de movimiento dentario refleja, en esen-cia, el sistema de fuerzas, la velocidad del movimiento dentario parece estar bajo el control genético; la variación en los niveles de fuerza no parece influir en la velocidad del movimiento dentario (Pilon y col. 1996; van Leeuwen y col. 1999; Ren y col. 2004) (Fig. 7.7). El sistema de fuerza óptimo no puede ser fijado, pero con la introducción de alambres superelásticos, se ha observado una tendencia hacia niveles de fuerza más bajos. Sin embargo, el nivel de fuerza inicial sigue siendo elevada (Fuck y Drescher 2006). Pese a la necesidad evidente del control del sistema de fuer-zas, constituye más la excepción que la regla que los sistemas de fuerzas sean considerados seriamente durante la inserción del aparato ortodóntico. A pesar de esto, existe un alto índice de éxito, que puede atribuirse a la interacción de las fuerzas gene-radas por los aparatos ortodónticos con el crecimiento, las fuer-zas oclusales, y un equilibrio entre las matrices musculares ex-ternas e internas. En el paciente adulto, la ausencia de crecimien-to en la dimensión vertical incrementa el riesgo de movimientos indeseables y daño iatrogénico. Por consiguiente, se recomienda la planificación cuidadosa del sistema de fuerzas aplicado.
Evaluación del anclajeUna vez que se hayan identificado los movimientos dentarios desea-dos y los sistemas de fuerzas necesarios a ser aplicadas, deben eva-luarse las fuerzas reactivas que actúan sobre la unidad de anclaje. Existen casos donde no se presentan problemas de anclaje (Fig. 7.8), ya que todas las fuerzas transferidas son deseables, mientras que otros
Fig. 7.3 (1) Los cuatro tipos de movimiento definido por Hocevar (1981), con la línea de acción de la fuerza correspondiente. (2) La misma clasificación pero con el sistema de fuerza definido con respecto al bracket.
M/F = 0
M/F = 10
M/F = 13
M/F = 5
(1) (2)
102 Ortodoncia del Adulto
(1)
(2)
(3)
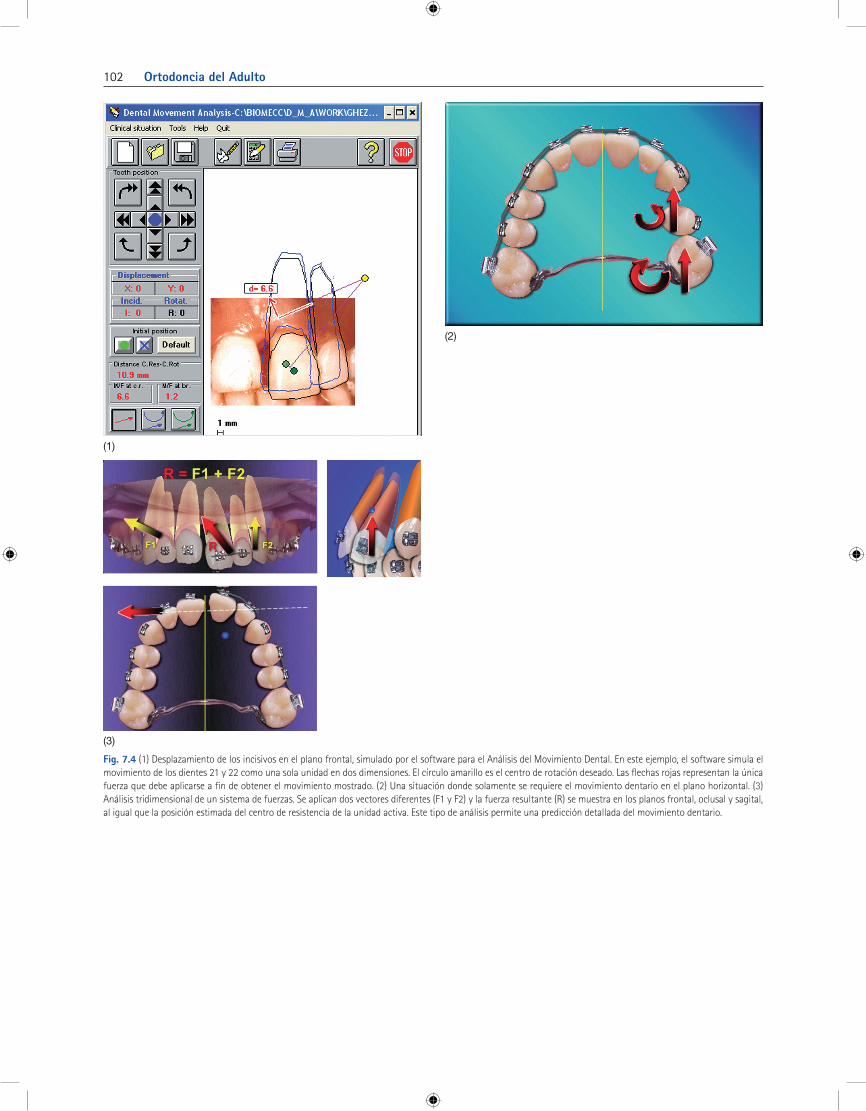
Fig. 7.4 (1) Desplazamiento de los incisivos en el plano frontal, simulado por el software para el Análisis del Movimiento Dental. En este ejemplo, el software simula el movimiento de los dientes 21 y 22 como una sola unidad en dos dimensiones. El círculo amarillo es el centro de rotación deseado. Las flechas rojas representan la única fuerza que debe aplicarse a fin de obtener el movimiento mostrado. (2) Una situación donde solamente se requiere el movimiento dentario en el plano horizontal. (3) Análisis tridimensional de un sistema de fuerzas. Se aplican dos vectores diferentes (F1 y F2) y la fuerza resultante (R) se muestra en los planos frontal, oclusal y sagital, al igual que la posición estimada del centro de resistencia de la unidad activa. Este tipo de análisis permite una predicción detallada del movimiento dentario.