Gorputza espazioa ezagutzeko tresna(unai murua eta eneritz chavarri)

DINAMIKA
c©Ugutz Garitaonaindia AntsoategiIngeniaritza Mekanikoa SailaGasteizko I.I.T. eta T.I.T.U.E.Euskal Herriko Unibertsitatea
2000/2001 ikasturtea
Indice
1. SARRERA 3
2. INDARRAK 3
3. ERREFERENTZIA SISTEMA DINAMIKAN. ERREFERENTZIA ZINEMATIKOAREKIKODESBERDINTASUNA 4
4. DINAMIKAREN OINARRIZKO LEGEAK 4
5. DINAMIKAREN ARIKETA OROKORRA 6
6. IBILBIDE BATI LOTUTA DAGOEN PARTIKULAREN DINAMIKA 7
7. DINAMIKAREN OINARRIZKO TEOREMAK, PARTIKULA EDO MASA PUN-TUALEI APLIKATUTA 97.1. MOMENTU LINEALA EDO HIGIDURA KANTITATEAREN TEOREMA 97.2. MOMENTU ANGELUAR EDO ZINETIKOAREN TEOREMA . . . . . . 10
7.2.1. INDAR ZENTRALEN ERAGINPEAN DAUDEN PARTIKULENDINAMIKA. AZALEREN LEGEA . . . . . . . . . . . . . . . . . 11
7.3. ENERGIA ZINETIKOAREN TEOREMA . . . . . . . . . . . . . . . . . . 137.3.1. ENERGIAREN KONTSERBAZIOA . . . . . . . . . . . . . . . . 14
8. PUNTUAREN HIGIDURA ERLATIBOAREN DINAMIKA 15
9. SISTEMAREN DINAMIKA 179.1. SISTEMA MEKANIKOAREN KONTZEPTUA. BARNE ETA KANPO IN-
DARRAK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179.2. SISTEMA BATEN HIGIDURAREN EKUAZIO DIFERENTZIALAK . . . 199.3. MASEN ZENTROAREN HIGIDURAREN TEOREMA . . . . . . . . . . 19
1

INDICE 2
9.3.1. MASEN ZENTROAREN HIGIDURAREN KONTSERBAZIO LEG-EA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
9.4. SISTEMA BATEN MOMENTU LINEALA EDO HIGIDURA KANTITATEA 229.4.1. SISTEMA BATEN HIGIDURA KANTITATEAREN ALDAKUNTZAREN
TEOREMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229.4.2. HIGIDURA KANTITATEAREN KONTSERBAZIO LEGEA . . . 24
9.5. SISTEMA (SOLIDO ZURRUNA) BATEN MOMENTU ANGELUAR EDOZINETIKOA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259.5.1. SOLIDO ZURRUN BATEN MOMENTU ANGELUAR EDO ZINETIKOA
INERTZI TENTSOREAREN FUNTZIOAN ESPRESATUTA . . . 279.5.2. SISTEMA ZURRUN BATEN MOMENTU ZINETIKOAREN AL-
DAKUNTZAREN TEOREMA, HIGIDURAN DAGOEN EDOZEINPUNTUREKIKO . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
9.5.3. MOMENTU ZINETIKOAREN KONTSERBAZIO LEGEA . . . . 319.6. SISTEMA (SOLIDO ZURRUNA) BATEN ENERGIA ZINETIKOA . . . . 31
9.6.1. SISTEMA (SOLIDO ZURRUNA) BATEN ENERGIA ZINETIKOARENALDAKUNTZAREN TEOREMA . . . . . . . . . . . . . . . . . . 34
9.7. SISTEMAREN HIGIDURAREN ZAZPI EKUAZIO UNIBERTSALAK . . 36
10. ARDATZ FINKO BATEN INGURUAN BIRATZEN ARI DEN SOLIDOARENDINAMIKA. BERMAPUNTUETAKO ERREAKZIOAK. OREKA ESTATIKOETA DINAMIKOA 38
11. EULERREN HIGIDURA EKUAZIOAK 42

2 INDARRAK 3
1. SARRERA
Jakina den bezala, zinematikak, espazioa-denbora erlazioan oinarrituta, gorputzek dutenhigidura aztertzen du, higidura hau eragiten duten indarrak kontuan izan gabe.
Dinamikak, aldiz, higidura eta hau sortzen duten indarren artean dagoen erlazioa aztertzendu.
Dinamikako ariketetan, indarrak kalkulatu beharko dira, eta indar hauek puntu materialbati edo puntu material baten konjuntu bati (sistema) eragiten dioten higidura aztertuko da.
2. INDARRAK
Gorputz material batek izango duen pausagune edo higidura egoera, beste gorputz mekanikoekinizan dezaken interakzio mekanikoen menpe dago.
Honela, gorputz materialen artean dagoen interakzio mekanikoa neurtzeko magnitudekuantitatiboa indarra da.
Indarra magnitude bektorial bat da, eta hau ezagutzeko beharrezkoa izango da hurrengoparametroak ezagutzea:
Modulua.
Norabidea.
Norantza.
Aplikazio puntua.
Partikula batean aplikatu daitezkeen indarrak, honela sailkatu ditzakegu:
1. Indar aktiboak eta lotura indarrak.
Indar aktiboak higidura sortzeko joera dute. Bestalde, lotura indarrak ez dute partiku-lak mugitzeko joera, baizik eta, hauek kokapen zehatz batzuk hartzeari edo higidurajakin bati aurre egiteko joera dute. Estatika aztertu genuenean, lotura mota desberdinenazterketa sakon bat burutu genuen.
2. Barne eta kanpo indarrak.
Sistema material baten barnean dagoen partikula material batek, bere sistema berdineandauden partikulengandik jasotzen badu interakzio mekanikoa, indar hauek barne indar-rak izango dira. Bestalde, partikula honek, bere sistemakoa ez den sistema batengatikjasotzen baditu interakzio mekanikoak, kanpo indarrak jasaten ariko da.

4 DINAMIKAREN OINARRIZKO LEGEAK 4
3. Eremu indarrak.
Eremu baten existentziagatik sortzen diren indarrak dira. Adibidez: grabitate-eremua,eremu-elektrikoa, eta abar.
Indar hauek, ezaugarri jakin bat (magnitude aktiboa), duten partikuletan ematen dira.Honela, partikula hau, kontsideratutako eremua aplikatuta dagoen toki geometrikoandagoenean jasango ditu eremu indarrak.
4. Marruskadura indarrak.
Bi sistemen arteko kontaktuko puntuetan sortzen dira, eta hauen arteko higidura erlat-iboari aurre egiteko joera dute.
5. Inertzi indarrak.
Partikula batek inertzia indarrak jasango ditu, honen kokapena azelerazioa duen er-referentzia sistema batekiko edo erreferentzia sistema ez inertzial batekiko, ematendugunean.
3. ERREFERENTZIA SISTEMA DINAMIKAN. ERREF-ERENTZIA ZINEMATIKOAREKIKO DESBERDINTA-SUNA
Zinematikan izendatu genuen erreferentzia sistema finkoak ez zuen bete behar inongobaldintza berezirik, guk honela nahi ez bagenuen behintzat.
Dinamikan aldiz, finkoa edo hobeto esanda inertziala izendatuko dugun erreferentzia sis-temak Newtonen lege bat bete behar du. Lege hau inertzi legea bezala ezagutzen da.
Erreferentzia sistema inertzial batean kokatua dagoen puntu material bat, sistema honekikopausagunean egoten bada, eta puntu honetan ez bada indarrik aplikatzen, puntu hau ez damugituko aipatutako erreferentzia sistemarekiko.
Erreferentzia sistema bat inertziala izango da, beste erreferentzia sistema inertzial batekikopausagunean dagoenean edo abiadura zuzen eta uniformearekin mugitzen denean.
4. DINAMIKAREN OINARRIZKO LEGEAK
Lege hauek Newtonek enuntziatu zituen XVII. mendearen amaieran.
1. Inertzi legea: Gorputz guztiak pausagunean edo higidura zuzen eta uniformean man-tentzen dira, egoera hau aplikatutako indar batengatik aldatzen ez bada.
4 DINAMIKAREN OINARRIZKO LEGEAK 5
Ikusi dugun bezala, erreferentzia sistema inertzialak lege hau betetzen du.
2. Dinamikaren oinarrizko legea: Higidura eta aplikatutako indarraren artean dagoenerlazioa, erlazio proportzional bat da, eta hau, indarraren aplikazio lerroan ematen da.
~F = m · ~a
Ekuazio honetan eragiten duen m parametroari masa inertea deitzen zaio eta hau, pro-portzionaltasun konstatea da.
Lege hau, dinamikaren oinarrizko legea da, honek, higidura legea, azelerazioa, etaeragina, indarra, erlazionatzen dituelako.
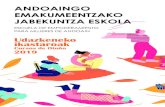
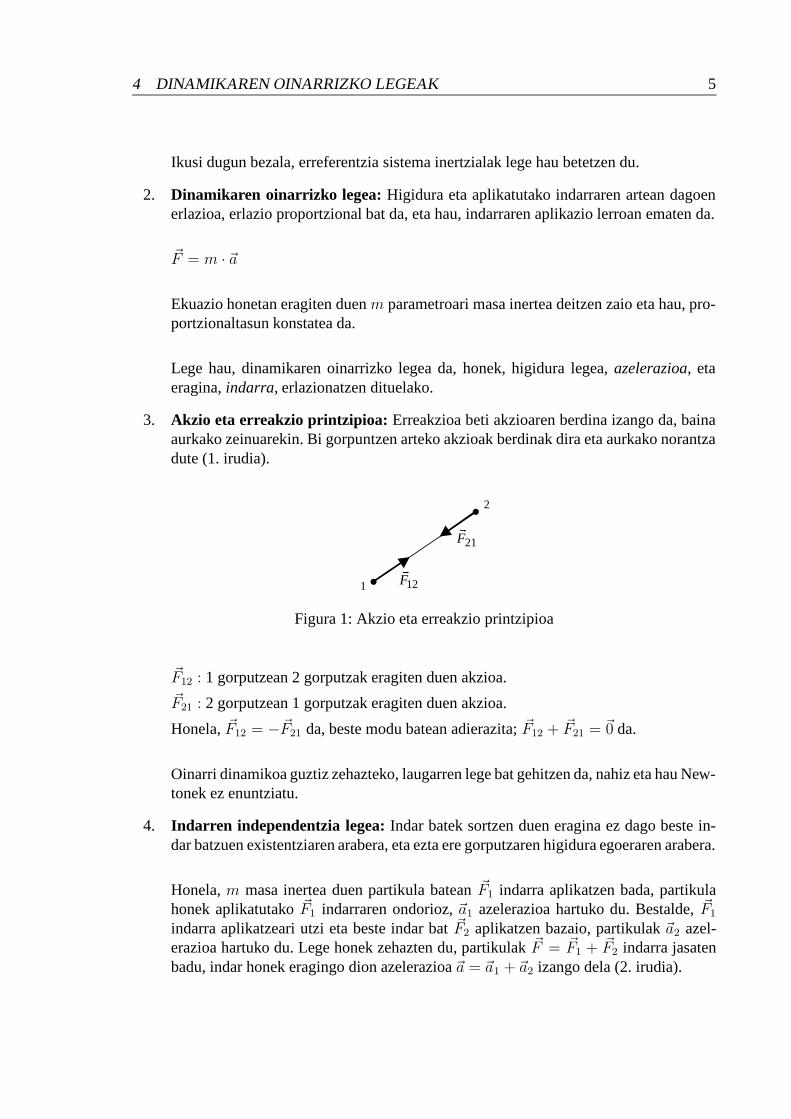
3. Akzio eta erreakzio printzipioa: Erreakzioa beti akzioaren berdina izango da, bainaaurkako zeinuarekin. Bi gorpuntzen arteko akzioak berdinak dira eta aurkako norantzadute (1. irudia).
1
2
12F�
21F�
Figura 1: Akzio eta erreakzio printzipioa
~F12 : 1 gorputzean 2 gorputzak eragiten duen akzioa.~F21 : 2 gorputzean 1 gorputzak eragiten duen akzioa.
Honela, ~F12 = −~F21 da, beste modu batean adierazita; ~F12 + ~F21 = ~0 da.
Oinarri dinamikoa guztiz zehazteko, laugarren lege bat gehitzen da, nahiz eta hau New-tonek ez enuntziatu.
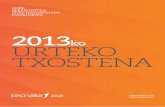
4. Indarren independentzia legea: Indar batek sortzen duen eragina ez dago beste in-dar batzuen existentziaren arabera, eta ezta ere gorputzaren higidura egoeraren arabera.
Honela, m masa inertea duen partikula batean ~F1 indarra aplikatzen bada, partikulahonek aplikatutako ~F1 indarraren ondorioz, ~a1 azelerazioa hartuko du. Bestalde, ~F1
indarra aplikatzeari utzi eta beste indar bat ~F2 aplikatzen bazaio, partikulak ~a2 azel-erazioa hartuko du. Lege honek zehazten du, partikulak ~F = ~F1 + ~F2 indarra jasatenbadu, indar honek eragingo dion azelerazioa ~a = ~a1 + ~a2 izango dela (2. irudia).

5 DINAMIKAREN ARIKETA OROKORRA 6
a�
1a�m
1F�
2F�
2a�
F�
Figura 2: Indarren independentzia legea
5. DINAMIKAREN ARIKETA OROKORRA
Dinamikaren oinarrizko ekuazioa honela idatzi daiteke:
~F = m · ~a = m ·d~v
dt= m ·
d2~r
dt2
Ekuazio bektorial hau espazio tridimentsionaleko hiru norabideetan deskonposatu daiteke,honela, hurrengo hiru ekuazio eskalar diferentzialak sortuz:
Fx = m ·dvx
dt
Fy = m ·dvy
dt
Fz = m ·dvz
dt
edo;
Fx = m ·d2x
dt2
Fy = m ·d2y
dt2
Fz = m ·d2z
dt2
Partikula batean eragiten duen ~F = Fx~i+Fy
~j+Fz~k indar bat, orokorrean, partikularen
kokapena, honen abiadura eta denboraren funtzioan egongo da:
~F = ~F (~r, ~v, t)
Puntu aske edo loturarik ez duen puntuaren dinamikaren ariketa orokorra, hurrengo bimodutan aurkeztu daiteke:
1. Puntuak duen higidura legea ezagutuz ~r = ~r(t), higidura hau sortzen duten indarrakzeintzuk diren kalkulatzea. Ariketa hau zuzena da eta deribatuz ebazten da.
2. Puntuan eragiten duten indarrak ezagututa, higidura legea kalkulatzea. Ariketa hau,ekuazio diferentzialak integratuz ebazten da. Orokorrean, bigarren mailako hiru ekuaziodiferentzial izango ditugu. Eta ondorioz, 6 integrazio konstante sortuko dira, eta hauek,ariketaren ingurune baldintzak aplikatuz kalkulatuko ditugu.
Aztertzen ari garen puntu materiala ez bada askea, hau da, lotura batzun eraginpean

6 IBILBIDE BATI LOTUTA DAGOEN PARTIKULAREN DINAMIKA 7
egoten bada, dinamikaren ekuazio orokorra honela idatzi ahal izango genuke:
~F + ~N = m · ~a, ekuazio honetan:
~F : Partikulan eragiten duten indarren erresultantea da.~N : Partikulan eragiten duten lotura indarren erresultantea da.
Ondorioz, loturarenbat duen puntu baten higidura aztertzerakoan, puntu hau askea delasuposatu dezakegu, loturak kendu eta loturen eraginez jasaten dituen erreakzioak aplikatzenbadiogu.
Loturak dituen puntu baten dinamika aztertzerakoan sortu daitezken ariketa motak hur-rengoak dira:
1. Puntuan eragiten duten indarrak eta puntuaren higidura legea ezagutuz, loturetan sortzendiren erreakzioak kalkulatzea.
Ariketa hau ebaztea erraza da. Honetarako ~F + ~N = m · ~a ekuazioa aplikatuko dugu,eta kalkulu zinematikoak erabiliz erreakzioak kalkulatuko ditugu.
2. Puntuan eragiten duten indarrak ezagutuz, honen higidura legea eta loturako erreakzioakkalkulatzea.
Kasu hau, loturak dituen puntuaren dinamikaren oinarrizko ariketa da. Honen ebazpena,orokorrean, beste kasuetan baino konplexuagoa delarik.
6. IBILBIDE BATI LOTUTA DAGOEN PARTIKULARENDINAMIKA
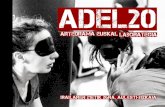
Bedi, ibilbide jakin bat jarraitzera behartuta dagoen m masadun partikula materiala. Par-tikula honetan zenbait indar eragile aplikatuta daude, hauen erresultantea ~F delarik. Ondori-oz, masa puntual honek lotura indarrak ere jasango ditu eta hauen erresultantea ~N da. Loturaindarren erresultante honek, ibilbidearekiko norabide normala izango du, partikula eta ibil-bidearen arteko kontaktua marruskadura gabekoa izaten bada.
Kasu hontako planteamendu dinamikoa:
~F + ~N = m · ~a
Ekuazio bektorial hau, puntuari lotuta dagoen osagai intrintsekoetan proiektatzen badugu(3. irudia), hiru ekuazio eskalar lortuko ditugu, hau da, norabide tangentean, normal nagu-sian eta binormalean.

6 IBILBIDE BATI LOTUTA DAGOEN PARTIKULAREN DINAMIKA 8
mN
�
τ�
η�
b�
F�
Figura 3: Ekuazio bektorialaren proiekzioa norabide intrintsikoetan
Fτ + Nτ = m · aτ
Fη + Nη = m · aη
Fb + Nb = m · ab
Esan dugun bezala, partikula eta ibilbidearen artean marruskadura gabeko kontaktuaematen bada, ~N erreakzioa ibilbidearekiko normala izango da. Hau da, plano normal nagu-sian kokatua dagoen bektorea da, ondorioz, norabide tangentzialeko osagaia zero da, Nτ = 0.
Zinematika aztertzerakoan ikusi genuenez, azelerazio bektorea koordenatu intrintsekoetanadieraziz gero, honek soilik osagai normal nagusia eta tangentziala zituen. Hots, azelerazioabektorea une guztietan plano oskulatzailean kokatua dagoen bektorea da, ondorioz osagaibinormala zero da, ab = 0.
Beraz, hiru ekuazio eskalarrak honela geratzen dira:
Fτ = m · aτ = m ·dv
dt= m ·
d2r
dt2(1)
Fη + Nη = m · aη = m ·v2
ρ(2)
Fb + Nb = 0 (3)
Hiru ekuazio hauek erabiliz, marruskadurarik gabeko lotura duen puntuaren ariketa di-namikoa ebatzi dezakegu, sortu daitezken bi ariketa motatan.
Zehazki, lehenengo kasuan, hau da, puntuan eragiten duten indarrak eta puntuaren higidu-ra ezagutuz, loturetan sortzen diren erreakzioak kalkulatu behar direnean, (1) ekuazioa er-abiliz, higidura legea kalkulatu dezakegu integrazio bidez. Jarraian, (2) eta (3) ekuazioakerabiliz lotura erreakzioak kalkulatuko ditugu.

7 DINAMIKAREN OINARRIZKO TEOREMAK, PARTIKULA EDO MASAPUNTUALEI APLIKATUTA 9
Hau da:
Nη = m ·v2
ρ− Fη
Nb = −Fb
Honela, erreakzio normal nagusian dagoen (m · v2
ρ) osagaiari indar zentripetua deitzen
zaio.
Akzio eta erreakzio printzipioan oinarrituta, ~N indarrarekiko aurkakoa den ~R erreakzioasortuko da. Erreakzio hau partikula materialak ibilbideari aplikatzen dion indarra da ~R =− ~N .
Rη = Fη −m ·v2
ρ
Rb = Nb
Honela, erreakzio normal nagusiko (m · v2
ρ) batugaia indar zentrifugoa da, indar zen-
tripetuarekiko modulu berdina baina aurkako norantza duena.
7. DINAMIKAREN OINARRIZKO TEOREMAK, PAR-TIKULA EDO MASA PUNTUALEI APLIKATUTA
Teorema hauek dinamikaren oinarrizko legeetatik zuzenean ondorioztatzen dira.
Honela, ariketa desberdinak ebazteko, kasu zehatzak aztertu ahal izango dira, plantea-mendu orokorra eragotziz. Hau da, planteamendu orokorrak exijitzen dituen integrazio proze-dura jarraitu gabe. Oinarrizko teorema hauetan, integrazio buruketak jadanik aplikatuta daude.
Jarraian definituko diren lehenengo bi oinarrizko teoremak bektorialak dira eta hirugar-rena, aldiz, teorema eskalarra da.
7.1. MOMENTU LINEALA EDO HIGIDURA KANTITATEAREN TEO-REMA
Bedi, m masa eta ~v abiadura duen partikula lineala. Honela, partikula honek duen mo-mentu lineala edo higidura kantitatea ~p, hurrengo ekuazioarekin definituko dugu:
~p = m · ~v

7 DINAMIKAREN OINARRIZKO TEOREMAK, PARTIKULA EDO MASAPUNTUALEI APLIKATUTA 10
Partikula material batek duen momentu lineala, magnitude bektorial bat da, eta honennorabidea eta norantza, partikulak aldiune horretan duen abiaduraren berdina da.
Newtonen dinamikaren bigarren legea gogoratzen badugu:
~F = m · ~a = m ·d~v
dt=
d (m · ~v)
dt=
d~p
dt=⇒ d~p = ~F · dt
Ekuazio hau integratuz, eta ingurune baldintzak bezala t1 unean, partikula materialakduen momentu lineala ~p1 dela, eta t2 unean duen momentu lineala ~p2 dela suposatuz:
∫ ~p2
~p1
d~p =∫ t2
t1
~F · dt =⇒ ~p2 − ~p1 =∫ t2
t1
~F · dt
Honela, partikula material batek t1 eta t2 aldiuneen artean hartzen duen bultzada defini-tuko dugu:
Bultzada =∫ t2
t1
~F · dt
Momentu linealaren teorema honela enuntziatu dezakegu: partikula material batek jasat-en duen higidura kantitatearen aldaketa, honek hartzen duen bultzadaren berdina da.
Ondorioztatu dugun adierazpen bektoriala, erreferentzia sistema cartesiarreko norabidenagusietan proiektatu daiteke:
p2x − p1x =∫ t2
t1
Fx · dt
p2y − p1y =∫ t2
t1
Fy · dt
p2z − p1z =∫ t2
t1
Fz · dt
Teorema honen aplikazioa erraza izango da, partikula materialean eragiten duten indarrakkonstanteak direnean edo denboraren funtzioan daudenean.
7.2. MOMENTU ANGELUAR EDO ZINETIKOAREN TEOREMA
0 puntu finko batekiko, partikula material batek duen momentu angeluar edo zinetikoadefinituko dugu ~L0, erreferentzia puntu finkoarekiko partikularen higidura kantitateak duenmomentua bezala.
~L0 = ~r ∧ ~p = ~r ∧m · ~v
Ekuazio honetako ~r bektorea, puntu mugikorrak, 0 puntu finkoarekiko duen kokapen

7 DINAMIKAREN OINARRIZKO TEOREMAK, PARTIKULA EDO MASAPUNTUALEI APLIKATUTA 11
bektorea da.
Momentu angeluarraren espresioa denborarekiko deribatuz:
d~L0
dt= ~r ∧ ~p + ~r ∧ ~p
Berdinketaren eskumatan dagoen lehenengo batugaia zero da; ~r = ~v eta ~p = m · ~v bibektore lerrokide direlako. Bigarren batugaia garatzen badugu:
~r ∧ ~p = ~r ∧d(m · ~v)
dt= ~r ∧m ·
d~v
dt= ~r ∧m · ~a = ~r ∧ ~F = ~M0
Ondorioz:d~L0
dt= ~M0 (4)
Emaitza hau honela enuntziatu daiteke: partikula batek puntu finko batekiko duen mo-mentu angeluarraren deribatua denborarekiko, eta puntu material horretan aplikatuta dagoenindarrak puntu finkoarekiko egiten duen momentua, berdinak dira.
Teorema hau modu integralean espresatu dezakegu ingurune baldintzak aplikatuz, hauda, t1 unean partikula materialak duen momentu angeluarra ~L01
izaten bada, eta t2 unean~L02
:
∫ ~L02
~L01
d~L0 =∫ t2
t1
~M0 · dt =⇒ ~L02− ~L01
=∫ t2
t1
~M0 · dt
Momentu axialaren kontzeptua kontuan izanda, (4) ekuazioa 0 puntutik pasatzen denedozein ardatzetan proiektatu dezakegu. Honela, e ardatz batekiko momentu angeluarra erdi-etsiko dugu:
dLe
dt= Me
Momentu angeluarraren teoremak garrantzi handia du indar zentralak jasaten dituen par-tikula materialen kasuan, hau da, beti puntu fiko batera zuzenduta dauden indarrak jasatendituenean. Honen adibidea, planetak eta Eguzkiaren arteko erakarpen indarra da.
7.2.1. INDAR ZENTRALEN ERAGINPEAN DAUDEN PARTIKULEN DINAMIKA.AZALEREN LEGEA
Partikula material bat, une guztietan 0 puntu finko batera zuzenduta dagoen indar bateneraginpean badago, indar honek puntu finkoarekiko egiten duen momentua zero da:
~M0 = ~0 =⇒d~L0
dt= ~0 =⇒ ~L0 =Ktea.
Emaitza honetan oinarrituta bi ondorio atera genezake:

7 DINAMIKAREN OINARRIZKO TEOREMAK, PARTIKULA EDO MASAPUNTUALEI APLIKATUTA 12
Lehenengoa, ~L0 bektorea konstantea izaten bada, puntu materialak egiten duen ibil-bidea laua izan behar da, hau da, ~L0 bektorea konstantea denez norabidea inbariantemantenduko da.
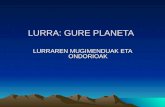
Bigarrena, partikula materialak duen abiadurak hurrengo ezaugarria betetzen du: 0puntu finkoan oinarrituta partikula materialaren kokapena definitzen duen ~r kokapenbektoreak, denbora tarte berdinetan ekortzen duen azalerak berdinak izan behar dute,hau da, abiadura aerolarra konstantea izango da.
Hau frogatzeko, ~r kokapen bektoreak dt denbora diferentzialean ekortzen duen azeleraerrepresentatzen duen 4. irudian oinarrituko gara.
0 r�
rdr��
+ rd�
sd
Figura 4: ~r kokapen bektoreak ekortutako azalera
Kokapen bektoreak dt denbora diferentzialean ekortutako azalera:
ds = |d~s| =
∣∣∣∣∣
1
2· (~r ∧ d~r)
∣∣∣∣∣=
1
2·∣∣∣(~r ∧ d~r)
∣∣∣
Eta abiadura aeoralarraren modulua:
ds
dt=
∣∣∣∣∣
d~s
dt
∣∣∣∣∣=
∣∣∣∣∣
1
2·
(
~r ∧d~r
dt
)∣∣∣∣∣=
1
2·∣∣∣(~r ∧ d~v)
∣∣∣
Kasu honetan partikula materialak jasaten duen indarra zentrala dela suposatu dugunez,~L0 konstantea da, ondorioz:
~L0 = ~r∧m ·~v = Ktea. =⇒ (~r∧~v) konstantea da, ondorioz∣∣∣(~r∧d~v)
∣∣∣ ere bai.
Honek esan nahi du abiadura aerosolarraren modulua konstantea dela. Ezaugarri hauKepler edo azaleren legea bezala ezagutzen da. Indar zentralen kasuan, kokapen bek-toreak ekortutako azalerak denbora tarte berdinean berdinak dira. Honek, puntu mugiko-rra, 0 puntu finkoaren inguruan pasatzen denean, puntu finko honetatik urruti pasatzendenean baino azkarrago pasatu behar dela erakusten digu (5. irudia).

7 DINAMIKAREN OINARRIZKO TEOREMAK, PARTIKULA EDO MASAPUNTUALEI APLIKATUTA 13
DC B A
0
a� a
�
Figura 5: Kepler edo azaleren legea
7.3. ENERGIA ZINETIKOAREN TEOREMA
Partikula material baten indar bizia definituko dugu, honen masa eta abiadurak duenmodulu karratuaren arteko biderketa bezala:
Indar bizia = m · v2
Energia zinetikoa, indar biziaren erdia bezala definitzen da:
T =1
2m · v2
Definitu ditugun bi kontzeptuak, magnitude eskalarrak izateaz gain positiboak dira.
Indar bizia definitzeko beste modu bat, partikula material batek duen higidura kantitateaeta abiaduraren arteko biderketa eskalarra da:
Indar bizia = (m · ~v) · ~v = m · (~v · ~v) = m · ~v 2 = m · v2
Indar biziaren espresioa diferentziatuz:
d(m · v2) = d(m · ~v 2) = m · 2 · ~v · d~v = 2 md~v
dt~v dt = 2 m ~a d~r = 2 ~F d~r
Espresio hau integratzeko, t = 0 unean partikula materialak duen abiadura v0 dela, eta t
unean bere abiadura v dela suposatuko dugu:
∫ v
v0
d(m · v2) = 2∫ t
t=0
~F d~r =⇒ m · v2 −m · v2
0= 2
∫ t
t=0
~F d~r
1
2m · v2 −
1
2m · v2
0=∫ t
t=0
~F d~r eta ondorioz: ∆T = W
Emaitza honek energia zinetikoaren teorema definitzen du. Honen arabera, partikula ma-terial batek jasaten duen energia zinetikoaren aldakuntza, eta partikula honetan aplikatutadauden indarrek garatutako lana, berdinak dira.
Energia eta lanaren izaera kontuan izanda, teorema hau eskalarra dela esaten da.
7 DINAMIKAREN OINARRIZKO TEOREMAK, PARTIKULA EDO MASAPUNTUALEI APLIKATUTA 14
7.3.1. ENERGIAREN KONTSERBAZIOA
Bedi, indar eremu baten eraginpean dagoen partikula puntuala. Honela, partikulak jasat-en duen indarra ~F dela suposatuko dugu, indar hau, partikulak duen kokapenaren araberakoaizango delarik.
Partikula puntuala kokapen batetik bestera mugitzerakoan, ~F indarrak garatutako lana ezdagoenean partikulak jarraitutako ibilbidearen arabera, hau da, soilik hasierako eta amaier-ako kokapenaren araberakoa denean, ~F indarra, edo hobeto esanda, indar eremua kontser-batiboa dela esango dugu.
Indar eremua kontserbatiboa bada, eta N , puntu materialak izan dezaken erreferentziakokokapen bat, espazioko P puntu batean, puntu materialak duen energia potentziala defini-tuko dugu, ~F eremu indarrak P puntutik, erreferentziako N puntura mugitzeko garatzenduen lana bezala.
Honela, puntu materialak, P kokapen geometrikoan duen enengia potentzialari VP deitzenbadiogu:
VP =∫ N
P
~F d~r (edozein ibilbide jarraituta garatutako lana)
Partikula materiala indar eremu kontserbatibo baten barnean, edozein ibilbide jarraituz,P1 puntutik P2 puntura desplazatzen denean:
∫ P2
P1
~F d~r =∫ N
P1
~F d~r =∫ P2
N
~F d~r =∫ N
P1
~F d~r −∫ N
P2
~F d~r = VP1− VP2
Hau da, indarren eremua kontserbatiboa izaten bada, honek garatutako lana partikulapuntuala P1 puntutik P2 puntura desplazatzen, partikulak kokapen geometriko hauetan duenenergia potentzialaren diferentzia da.
Energia zinetikoaren teorema kontuan izaten badugu, hau P1 zein P2 puntuetan zehaztuz:
1
2m v2
P2−
1
2m v2
P1=∫ P2
P1
~F d~r = VP1− VP2
1
2m v2
P2+ VP2
=1
2m v2
P1+ VP1
ondorioz,1
2m v2 + V = Ktea.
Emaitza hau honela enuntziatu daiteke: partikula bat indar eremu kontserbatibo bateanmugitzen denean, edozein puntu geometrikotan duen energia zinetiko eta potentzialarenbatura konstantea da.
Kontuan izan behar dugu indar guztiak ez direla kontserbatiboak. Adibidez, marruskadu-ra indarrak ez dira kontserbatiboak, honek marruskaduraren eragina duen higidura batean,(1
2m v2 + V ) energia mekanikoa ez dela konstantea esan nahi du, kasu honetan, energia

8 PUNTUAREN HIGIDURA ERLATIBOAREN DINAMIKA 15
zinetikoaren zati bat berotasunean transformatzen bait da. Beste modu batera esanda, mar-ruskadura indarra ez da kontserbatiboa, puntu materialak egiten duen ibilbidearen araberakoadelako, hau da, ibilitako distantziaren araberakoa.
Marruskaduraren eragina aztertu ahal izateko, askoz ere sakonagoa den lege batera jobehar da. Suposatzen badugu sortzen den bero kantitatea Q dela, bero energia hau, energiamekanikoaren unitateetan espresatzen badadugu, hurrengo berdinketa betetzen da:
1
2m v2
0+ V0 =
1
2m v2 + V + Q
8. PUNTUAREN HIGIDURA ERLATIBOAREN DINAMI-KA
Orain arte, puntuaren dinamikan aztertutako guztia, erreferentzia sistema inertzial bateankokatuta eta dinamikaren funtsezko legeetan oinarrituta dago.
Ikus dezagun jarraian, zein planteamendu izan behar dugun erreferentzia sistema finkoaez denan.
Bedi, ~F1, ~F2, . . . , ~Fi, . . . , ~Fn indar multzoa jasaten duen, m masadun partikula mate-riala. Jarraian, indar hauek partikulari eragiten dioten higidura aztertuko dugu 0XY Z er-referentzia sisteman oinarrituta. Gainera, erreferentzia sistema hau, 01X1Y1Z1 erreferentziasistema finkoarekiko mugitu egiten dela suposatuko dugu.
Puntuaren zinematikan ondorioztatu genuen bezala:
~aabs = ~as + ~aerl + ~acor non; ~acor = 2 ~w ∧ ~verl
Berdinketaren bi aldeak partikula materialak duen m masagatik biderkatuz:
m · ~aabs = m · ~as + m · ~aerl + m · ~acor
Higidura absolutuarentzat, dinamikaren legeak zera ziurtatzen digu:
m · ~aabs =i=n∑
i=1
~Fi
Ondorioz:
i=n∑
i=1
~Fi = m · ~as + m · ~aerl + m · ~acor

8 PUNTUAREN HIGIDURA ERLATIBOAREN DINAMIKA 16
Ekuazio honetan, guri puntu materialak 0XY Z erreferentzia sistemarekiko duen higidu-ra interesatzen zaigunez, ~aerl osagaia bakanduko dugu:
m · ~aerl =i=n∑
i=1
~Fi −m · ~as −m · ~acor
m · ~aerl =i=n∑
i=1
~Fi + ~Finer.arr. + ~Finer.cor.
Emaitza honetan:
i=n∑
i=1
~Fi = ~F batugaia, partikulan eragiten duten indar aktiboen erresultantea da.
~Finer.arr. = −m · ~as, arrastreko higidurak eragindako inertzi indarra.
~Finer.cor. = −m · ~acor, coriolisen azelerazioak eragindako inertzi indarra.
Lortu dugun emaitza honek, dinamikaren oinarrizko legea finkatzen digu higidura er-latiboarentzat. Ekuazio honetan ikus dezakegu, partikulan eragiten duten indarrei, bi inertziindar gehitu diegula, hauek partikula materialak sistema mugikorrean duen higidura erlati-boaren eragina kontuan hartzen dutelarik.
Jarraian kasu berezi batzuk aztertuko ditugu:
1. Coriolisen inertzi indarra existitzen ez den kasua.
~Finer.cor. = −m · ~acor = −2 ·m · ~w ∧ ~verl
Indar hau anulatzeko, hurrego baldintzetatik gutxienez bat bete behar da:
a) ~w = ~0 izatea. Honek, ardatz mugikorrek duten arrastreko higidura translazioadela esan nahi du.
b) ~verl = ~0 izatea. Hau da, aztertzen ari garen une horretan abiadura erlatiboa zeroizatea.
c) ~w eta ~verl bektoreak lerrokideak izatea.
Aipatutako edozein baldintza betetzen bada, dinamikaren legea honela geratuko da:
~F + ~Finer.arr. = m · ~aerl

9 SISTEMAREN DINAMIKA 17
2. Coriolis zein arrastreko inertzi indarra existitzen ez diren kasua.
Honela, Coriolisen inertzi indarra ez emateko baldintzak betetzeaz gain, arrastrekoinertzi indarra ez emateko, ~as = ~0 izan behar da. Honek esan nahi du sistema mugiko-rraren higidurak, translazio zuzen eta uniformea izan behar duela.
Kasu honetan dinamikaren ekuazioa higidura eralatiboarentzat:
~F = m · ~aerl
Ekuazio hau dinamikaren oinarrizko legea da.
Arrazoi honengatik, translazio higidura zuzen eta uniformea duten sistema guztiakinertzialak direla esango dugu. Hauetan, indar osagarriak gehitu gabe, dinamikarenlegeak betetzen dira. Gainera, erreferentzia sistema inertzialetik ikusita, ezin izangoda sistema inertzialen higidura bereiztu.
9. SISTEMAREN DINAMIKA
9.1. SISTEMA MEKANIKOAREN KONTZEPTUA. BARNE ETA KAN-PO INDARRAK
Sistema mekanikoa, puntu materialekin osatutako konjuntua da, non puntu material bakoitzarenkokapen edo higidurak, beste puntu guztien kokapen eta higidura baldintzatzen duen.
Honela, sistema mekanikoa: Eguzki sistema, mekanismo bat edo solido zurrun bat izandaiteke.
Sistemaren puntu bakoitzean eragiten duten indarrak, kanpo edo barne indarrak izandaitezke.
Beste sailkapen posible bat, lotura indar eta indar aktiboen arteko bereizketa eginez lortudaiteke.
Sistema mekaniko baten barne indarrek, hurrengo bi ezaugarriak betetzen dituzte:
1. Barne indar guztien erresultantea zero da.
Hau da, dinamikaren hirugarren legearen arabera, sistema mekaniko bateko bi edozeinpuntu aukeratzen baditugu, puntu batek besteari ~F b
12eragiten dio, besteak aurrekoari
~F b21
eragiten diolarik. Indar hauek modulu bera baina aurkako zentzua dute, ondorioz

9 SISTEMAREN DINAMIKA 18
bien arteko batura zero da:
~F b12
+ ~F b21
= ~0
Sistema materialean aukeratu ditzakegun edozein bi puntu paretan ezaugarri hau betet-zen denez, batuketa hau sistema materialekoak diren puntu guztiei aplikatzen badiegu:
i=n∑
i=1
~Fi = ~0
2. Barne indar guztiek ausazko 0 puntu batekiko egiten duten momentuen batura zero da.
Sistema materialekoak diren edozein 1 eta 2 puntuak aukeratuta, hauen artean sortzendiren indarrek ausazko 0 puntuarekiko egiten duten momentua kalkulatuko dugu (6.irudian oinarrituta.
d
01
2
12iF
�
21iF
�
Figura 6: Bi puntutan apliakatutako indarrek sortzen duten momentua 0 puntuarekiko
Honela, partikula puntualetan aplikatuta dauden indarrek 0 puntuarekiko sortzen dutenmomentua:
~M0(~F b12
) + ~M0(~F b21
) = ~F b12· d− ~F b
21· d = (~F b
12− ~F b
21) · d = ~0
Sistema materialean sortu daitezkeen puntu pare guztiek 0 puntuarekiko sortzen dutenmomentua kalkulatzen badugu:
i=n∑
i=1
~M0(~Fi) = ~0
Haatik, bi baldintza hauetan oinarrituz ezin dugu ondorioztatu sistemaren barne indarrakorekatu egiten direnik honen higiduran eraginik sortu gabe. Indar hauek puntu desberdinetanaplikatuta daude, eta ondorioz, puntu materialen arteko desplazamenduak eragin ditzakete.Barne indarrak orekatu egingo dira sistema materialak ezaugarri berezi bat betetzen duenean,hots, solido zurruna denean.
9 SISTEMAREN DINAMIKA 19
9.2. SISTEMA BATEN HIGIDURAREN EKUAZIO DIFERENTZIALAK
Bedi n partikula materialekin osatutako sistema mekanikoa. Partikula bakoitzak, hur-renez hurren, m1, m2, . . . , mi, . . . , mn masa du. Partikula material bakoitzean ~F k
i kanpo in-darrak eta ~F b
i barne indarrak eragingo dute. Honela, puntu bakoitzean dinamikaren oinar-rizko legea aplikatu ahal izango dugu:
m1 · ~a1 = ~F k1
+ ~F b1
m2 · ~a2 = ~F k2
+ ~F b2
......
...mi · ~ai = ~F k
i + ~F bi
......
...mn · ~an = ~F k
n + ~F bn
Sistemakoa den puntu bakoitzaren higidura legea zehazten duten ekuazio hauei, sis-temaren higiduraren ekuazio diferentzialak deitzen zaie.
Diferentzialak dira, ~ai =d2~ri
dt2delako.
Jarraian, ekuazio hauek ardatz koordenatuekin osatutako erreferentzia sistema bateanproiektatzen baditugu, ekuazio bektorialen eskalarizazioa lortuko dugu.
Beraz, sistemaren ariketa dinamikoa ebatzita dagoela pentsa dezakegu, baina hau prak-tikoki ez da egia hurrengo bi arrazoiengatik:
1. Ekuazio diferentzialen sistema ebazterakoan, gainditu ezinak diren zailtasun matem-atikoak aurkitzeagatik.
2. Kasu bakoitzean ematen diren magnitudeak ebaluatzeko dagoen zailtasunagatik.
Honela, ekuazio hauen erabilpen garrantzitsuena, jarraian aztertuko dugun sistemarendinamikaren teoremak lortzeko, oinarrizko ekuazioak izatea da.
9.3. MASEN ZENTROAREN HIGIDURAREN TEOREMA
Masen geometria kapituluan ikasi genuena gogoratuz, sistema material baten masen zen-troaren kokapena hurrengo ekuazioarekin kalkulatu dezakegu:
~rG =
i=n∑
i=1
mi · ~ri
i=n∑
i=1
mi
=
i=n∑
i=1
mi · ~ri
M

9 SISTEMAREN DINAMIKA 20
Non M , sistema materialaren masa osoa den. Ekuazio hau garatuz:
i=n∑
i=1
mi · ~ri = M · ~rG
Azken adierazpen honetako berdinketaren bi aldeen bigarren deribatuak kalkulatuko di-tugu. Honetarako, batuketa baten deribatua, deribatuen batura dela gogoratuz:
i=n∑
i=1
mi ·d2~ri
dt2= M ·
d2~rG
dt2=⇒
i=n∑
i=1
mi · ~ai = M · ~aG
Non ~aG, sistemaren masen zentroak duen azelerazioa den.
Ondorioztatu berri dugun ekuazioan, berdinketaren ezkerretan dagoen batukaria, partiku-la bakoitzean eragiten duten indarrak gehituz kalkulatu dezakegu:
i=n∑
i=1
mi · ~ai =i=n∑
i=1
~F ki +
i=n∑
i=1
~F bi
Honela, barne indarrak betetzen duten ezaugarria gogoratuz, hau da:
i=n∑
i=1
~F bi = ~0
Beraz, aurreko ekuazioa;i=n∑
i=1
mi · ~ai =i=n∑
i=1
~F ki
Eta lehen lortutako emaitza aplikatuz:
M · ~aG =i=n∑
i=1
~F ki
Ekuazio honek masen zentroaren higidura teorema adierazten du, eta hau honela enuntziatudezakegu:
Sistema materialaren masa osoa, eta honen masen zentroak duen azelerazioaren artekobiderketa, sistema materialean eragiten duten kanpo indar guztien baturaren berdina da.
Ikusten dugun bezala, ondorioztatu dugun ekuazio hau, eta puntuaren dinamikaren bigar-ren legea berdinak dira. Honen arabera, beste enuntziatu hau ere egin dezakegu:
Sistema material baten masen zentroa puntu material bat bezala mugitzen da, kontuanizanda puntu honek duen masa, sistema materialaren masa osoa dela, eta puntuak sistemamaterialean eragiten duten kanpo indar guztiak jasaten dituela.
Ekuazioa ardatz koordenatu batzuetan proiektatzen badugu:
9 SISTEMAREN DINAMIKA 21
M ·d2xG
dt2=
i=n∑
i=1
F kix
M ·d2yG
dt2=
i=n∑
i=1
F kiy
M ·d2zG
dt2=
i=n∑
i=1
F kiz
Azken ekuazio hauek, sistema baten masen zentroak duen higidura ekuazio diferentzialakdira, modu eskalarrean adierazita.
Aldez aurretik, sistema materialak duen higidura translaziokoa dela ezagutzen badugu,teorema honen bitartez ariketa ebatzi ahal izango genuke.
Edozein kasutan, teorema hau erabiliz sistema materialaren masen zentroak duen higidu-ra kalkulatu dezakegu. Honetarako ez dugu kontuan izan barne indarrak, hauek ezezagu-nak izango direlarik. Honela, teorema honen aplikazio garrantzitsuena, masen zentroak duenhigidura kalkulatzea da, barne indarrak kalkulatu gabe.
9.3.1. MASEN ZENTROAREN HIGIDURAREN KONTSERBAZIO LEGEA
Aurreko atalean lortutako teoreman oinarrituta, zera ondorioztatu dezakegu:
1. Sistema materialean eragiten duten kanpo indarren batura zero dela suposatzen badugu:
i=n∑
i=1
~F ki = ~0 =⇒ M · ~aG = ~0 =⇒ ~aG = ~0 =⇒ ~vG = Ktea.
Sistema material batean eragiten duten kanpo indarren batura zero izaten bada, sis-temaren masen zentroa abiadura konstantearekin mugituko da, hots, higidura zuzeneta uniformearekin. Honela, hasieran masen zentroa pausagune egoeran egoten bada,honek pausagunean jarraituko du. Ikusten dugun bezala, soilik barne indarren eraginakezin du sistemaren masen zentroaren higidura aldatu.
2. Kasu honetan, ez dugu suposatuko sistema materialean eragiten duten kanpo indarrakzero direnik, baina bai kanpo indar hauen proiekzioen erresultantea norabide bateanzero dela, adibidez, X norabidean. Honela:
i=n∑
i=1
F kix
= 0 =⇒ M ·d2xG
dt2= 0 =⇒
dxG
dt= vGx
= Ktea.
Ondorioz, sistema materialaren masen zentroak duen abiaduraren proiekzioa X ar-datzean konstantea da. Emaitza hau, sistema materialak hasieran duen higiduran vGx
=
9 SISTEMAREN DINAMIKA 22
0 kasura zehazten badugu, ondorengo une guztietan ere vGxzero izango da. Hots,
masen zentroa ez da desplazatuko X ardatzean zehar.
9.4. SISTEMA BATEN MOMENTU LINEALA EDO HIGIDURA KAN-TITATEA
Sistema baten momentu lineala edo higidura kantitatea definituko dugu, sistema osatzenduten partikula material guztien momentu linealen batura bezala.
~P =i=n∑
i=1
mi · ~vi
Sistema material baten masen zentroaren kokapena kalkulatzeko erabili dugun espresioagogoratuz:
i=n∑
i=1
mi · ~ri = M · ~rG
Jarraian espresio hau denborarekiko deribatzen badugu:
i=n∑
i=1
mi ·d~ri
dt= M ·
d~rG
dt=⇒
i=n∑
i=1
mi · ~vi = M · ~vG =⇒ ~P = M · ~vG
Emaitza hau honela enuntziatu dezakegu: sistema material baten momentu lineal edohigidura kantitatea, sistemaren masa osoa eta honen masen zentroak duen abiaduraren artekobiderkaduraren berdina da.
Hemendik zera ondorioztatzen da; sistema material bat mugitu egiten bada honen masenzentroa finko mantenduz, sistemaren momentu lineala zero da.
Ondorioz, sistema materialaren ~P momentu linealak, bere masen zentroaren higiduraadierazten du, baina ez sistema materialak masen zentroarekiko izan dezaken biraketa posi-blea.
9.4.1. SISTEMA BATEN HIGIDURA KANTITATEAREN ALDAKUNTZAREN TEO-REMA
Bedi n partikula materialekin osatutako sistema materiala. Higiduraren ekuazio difer-entzialak n partikulei aplikatu eta gehitu egiten baditugu:
i=n∑
i=1
mi · ~ai =i=n∑
i=1
~F ki +
i=n∑
i=1
~F bi
Sistema material bat osatzen duten puntu guztietan aplikatutako barne indarren baturazero denez, aurreko espresio honela geratzen zaigu:

9 SISTEMAREN DINAMIKA 23
i=n∑
i=1
mi · ~ai =i=n∑
i=1
~F ki
Sistema osatzen duten partikula material guztiak masa konstantea dutela suposatzen badugu:
i=n∑
i=1
mi · ~ai =
d( i=n∑
i=1
mi · ~vi
)
dt=
d~P
dt; ondorioz:
i=n∑
i=1
~F ki =
d~P
dt
Emaitza hau honela enuntziatu daiteke: sistema material batek duen higidura kantitatearenderibatua denborarekiko, sistema honetan eragiten duten kanpo indar guztien batura da.
Lortutako emaitza ardatz koordenatuetan proiektatzen badugu:
i=n∑
i=1
F kix
=dPx
dt
i=n∑
i=1
F kiy
=dPy
dt
i=n∑
i=1
F kiz
=dPz
dt
Teorema honen adierazpen integrala honela kalkulatuko da:
i=n∑
i=1
~F ki · dt = d~P
∫ ~P2
~P1
d~P =∫ t2
t1
i=n∑
i=1
~F ki · dt =⇒ ~P2 − ~P1 =
i=n∑
i=1
∫ t2
t1
~F ki · dt =
i=n∑
i=1
~Ski
Denbora tarte batean sistema material baten higidura kantitatearen aldakuntza, eta denbo-ra tarte berean sistema horretan aplikatuta dauden indarrek eragiten duten bultzaden batura,berdinak dira.
Adierazpen bektorial hau ardatz koordenatuetan proiektatzen badugu:

9 SISTEMAREN DINAMIKA 24
P2x− P1x
=i=n∑
i=1
Skix
P2y− P1y
=i=n∑
i=1
Skiy
P2z− P1z
=i=n∑
i=1
Skiz
Sistema baten higidura kantitatearen aldakuntzaren teorema eta masen zentroaren higidu-raren teorema ia berdinak dira. Teorema hauen emaitzak gogoratuz:
Higidura kantitatearen aldakuntzaren teorema:d~P
dt=
i=n∑
i=1
~F ki
Masen zentroaren higiduraren teorema: M · ~aG =i=n∑
i=1
~F ki
Honela, (~P = M · ~vG) sistema baten momentu lineal edo higidura kantitatearendefinizioa lehenengo ekuazioan aplikatzen badugu, bigarren ekuazioa lortu dezakegu.
9.4.2. HIGIDURA KANTITATEAREN KONTSERBAZIO LEGEA
Aurreko atalean erdietsitako teoreman oinarrituz ondorio hauek enuntziatu ditzakegu:
1. Sisteman eragiten duten kanpo indarren batura zero izaten bada, sistemaren higidurakantitatea konstante mantentzen da. Frogapena:
i=n∑
i=1
~F ki = ~0 =⇒
d~P
dt= ~0 =⇒ ~P = Ktea.
2. Sisteman eragiten duten kanpo indarren batura zero ez dela suposatuko dugu, bainabai kanpo indar hauen proiekzioen batura edozein norabidetan, adibidez, X ardatzarennorabidean. Kasu honetan, higidura kantitatearen proiekzioa norabide horretan kon-stante mantenduko da. Frogapena:
i=n∑
i=1
F kix
= 0 =⇒dPx
dt= 0 =⇒ Px = Ktea.
Higidura kantitatearen kontserbazio lege hauetan oinarrituz, sistema batean soilik barneindarren eraginagatik, honek duen higidura kantitatea aldatzea ez dela posible ondorioztatzendugu.

9 SISTEMAREN DINAMIKA 25
9.5. SISTEMA (SOLIDO ZURRUNA) BATEN MOMENTU ANGELU-AR EDO ZINETIKOA
Bedi M masa osoa eta G masen zentroa duen solido zurruna. Sistema material hau, er-referentzia sistema inertzial batetik aztertuko dugu.
Honela, sistema materialekoa den mi masadun partikularen momentu zinetikoa ausazkoP puntuarekiko (7. irudia):
~LP = ~ri ∧mi · ~vi
X
Y
Z
ir�
mi
G
P
ir '�
Gr�
w�
Figura 7: mi masa duen partikulak, P puntuarekiko duen momentu zinetikoa
Bestalde, zinematikan ikasi duguna aplikatuz, mi masa duen partikularen abiadura, P
puntuaren abidurarekin erlazionatu dezakegu, bi puntuak sistema berekoak direlako:
~vi = ~vP + ~w ∧ ~ri
Ekuazio hau, momentu zinetikoaren espresioan ordezkatzen badugu, mi masa duen par-tikula materialaren momentu angeluar edo zinetikoa lortuko dugu:
~LP = ~ri ∧mi · (~vP + ~w ∧ ~ri) = (~ri ·mi) ∧ ~vP + ~ri ∧ (~w ∧ ~ri) ·mi
Jarraian, ekuazio hau, orokorrean n partikulakin osatuta dagoela suposatuko dugun sis-tema materialean aplikatzen badugu:
~LP =( i=n∑
i=1
~ri ·mi
)
∧ ~vP +i=n∑
i=1
[
~ri ∧ (~w ∧ ~ri) ·mi
]
Aztertzen ari garen sistema materiala, solido zurruna izateaz gain jarraia izaten bada, au-rreko ekuazioko batukariak integral bilakatzen dira, eta puntu material bakoitzak orokorrean

9 SISTEMAREN DINAMIKA 26
zuen mi masa puntuala, dmi masa diferentzialagatik ordezkatu behar dugu:
~LP =( ∫ i=n
i=1
~ri · dmi
)
∧ ~vP +∫ i=n
i=1
[
~ri ∧ (~w ∧ ~ri) · dmi
]
Ekuazio hau erabilterrazagoa egiteko, kontuan izanda sistema osoaren momentu zinetikoakalkulatzen ari garela, eta ekuazioan eragiten duten integralak, sistema osoa osatzen duenpartikulei aplikatu behar zaiela, honela adierazi dezakegu aurreko ekuazioa modu sinpleagobatean. Sinplifikazio honetan, masa diferentzial bakoitzak balio bera duela ere suposatukodugu:
~LP =( ∫
~ri · dm)
∧ ~vP +∫
~ri ∧ (~w ∧ ~ri) · dm
Emaitza hau oinarritzat hartuta, aztertu ditzagun hurrengo kasu bereziak:
1. Suposatu dezagun P puntua puntu finko bat dela. Ezaugarri hau betetzen duen puntua0 hizkiarekin izendatzen badugu:
Kasu honetan: ~vP = ~v0 = ~0
Ondorioz, ~L0 =∫
~ri ∧ (~w ∧ ~ri) · dm
Ekuazio honetan dagoen ~ri kokapen bektorea, sistema materiala osatzen duten dm
masa diferentzial guztien kokapen bektorea da. Bektore honen oinarria 0 puntuan dago.
2. Suposatu dezagu P puntua sistema materialaren G masen zentroa dela.
Oinarritzat hartu dugun ekuaziotik abiatuta, berdinketaren eskubitan dagoen lehenen-go batugaia zero dela ikusten dugu, integralean dagoen ~ri kokapen bektoreak oinarriaG puntuan duelako. Hau da,
∫
~ri · dm = ~0:
~LG =∫
~ri ∧ (~w ∧ ~ri) · dm
Kasu honetan, ~ri kokapen bektore guztiak G puntuan dute oinarria.
3. Azkenik, P puntua sistema materialekoa den edozein puntu izaten bada:
Kasu honetan, 7. irudian oinarrituz ~ri kokapen bektorea honela espresatu dezakegu:
~ri = ~rG + ~ri′
Emaitza hau momentu zinetikoaren ekuazio orokorrean ordezkatzen badugu:
9 SISTEMAREN DINAMIKA 27
~LP =∫
(~rG + ~ri′) · dm ∧ ~vP +
∫
(~rG + ~ri′) ∧
(
~w ∧ (~rG + ~ri′))
· dm
Espresio hau garatuz:
~LP =( ∫
~ri′ · dm
)
∧ ~vP + (~vG ∧ ~vP )∫
dm +∫
~ri′ ∧ (~w ∧ ~ri
′) · dm +
+( ∫
~ri′ · dm
)
∧ (~w ∧ ~rG) + ~rG ∧(
~w ∧∫
~ri′ · dm
)
+ ~rG ∧ (~w ∧ ~rG) ·∫
dm
Emaitza honetan, berdinketaren eskubitan dauden; lehenengo, laugarren eta bostgar-ren batugaiak zero dira, hauetan
∫
~ri′ · dm osagaiak eragiten duelako. Integral honen
barnean dagoen ~ri′ kokapen bektoreak oinarria sistema materialaren masen zentroan
duenez,∫
~ri′ · dm = ~0 da.
Berdinketaren eskumatan dagoen hirugarren batugaia:∫
~ri′ ∧ (~w∧~ri
′) ·dm = ~LG da.Ondorioz:
~LP = (~vG ∧ ~vP ) ·M + ~LG + ~rG ∧ (~w ∧ ~rG) ·M = ~rG ∧ (~vP + ~w ∧ ~rG) ·M + ~LG
Azkenik, ~vG = ~vP + ~w ∧ ~rG dela jakinda:
~LP = (~rG ∧ ~vG) ·M + ~LG
Solido zurrunentzat, edozein P punturekiko duen momentu angeluar edo zinetikoarenespresioa kalkulatu dugu:
~LP = ~rG ∧M · ~vG + ~LG
Lortu berri dugun espresio hau, momentu zinetikoari aplikatutako Koening-en teore-ma da eta honela enuntziatu dezakegu:
Sistema baten (solido zurruna) momentu zinetikoa, sistemakoa den ausazko P puntubatekiko, bi batugaiekin osatzen da: lehenengoa, sistema materialaren masa osoa ho-nen masen zentroan kokatuta dagoela suposatuz, puntu honek duen momentu zinetikoada, eta bigarren batugaia, sistema materialak bere masen zentroarekiko duen momentuzinetikoa da.
9.5.1. SOLIDO ZURRUN BATEN MOMENTU ANGELUAR EDO ZINETIKOA IN-ERTZI TENTSOREAREN FUNTZIOAN ESPRESATUTA
Aurreko atalean ikusi dugu, sistema baten momentu zinetikoa 0 puntu finko batekiko edoG masen zentroarekiko adierazten badugu, hurrengo itxura hartzen duela:

9 SISTEMAREN DINAMIKA 28
~L =∫
~r ∧ (~w ∧ ~r) · dm
Esan beharra dago, espresio honetan ~L bektorea finkoa dela, hau da, sistema materi-alaren erreferentziazko puntu bati lotuta dagoela, kasu honetan gainera, puntu hau finkoaedo sistemaren masen zentroa izango da. Bestalde, integrala sistema osatzen duten partikuladiferentzial guztietan aplikatzen da, horretaz gain, ~r kokapen bektorea partikula diferentzialbakoitzaren kokapena da erreferentzia puntuarekiko.
Espresio honetan dagoen biderkaketa bektorial bikoitza garatuz:
~r ∧ (~w ∧ ~r) = (~r · ~r) · ~w − ~r · (~r · ~w) = r2 · ~w − (~r · ~r) · ~w =[
r2 δ − (~r · ~r)]
· ~w
Hemen lortutako emaitza honela definituko ditugu:
~r kokapen bektoreak duen moduluaren karratua: r2 = ~r · ~r
Eragile diadikoa: (~r · ~r)
Kronecker-en δ eragilea: δ
Beraz, momentu angeluar edo zinetikoaren espresioa parametro berri hauen funtzioan:
~L =∫ [
r2 δ − (~r · ~r)]
dm · ~w = {I} · ~w
Non, {I} erreferentziatzat hartutako punturari eta honen inguran konkatutako errefer-entzia sistemaren norabidetan orientatuta dagoen inertzi tentsorea den. Atal honen hasieranerabili dugun espresioak betetzen zituen baldintzak gogoratuz, momentu zinetikoa 0 puntufinko bati edo sistema materialaren G masen zentroari lotuta egon behar zen, ondorioz, in-ertzi tentsorea hau, momentu zinetikoa lotuta dagoen puntu berari lotuta egongo da.
Momentu zinetikoarentzat, inertzi tentsorearen funtzioan lortutako espresioa modu ma-trizialean espresatzen badugu:
Lx
Ly
Lz
=
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
·
wx
wy
wz
Espresio hau ikusiz, orokorrean ~L eta ~w lerrokideak ez direla izango ondorioztatu deza-kegu.
Masen geometria ikasi genuenean frogatu genuena gogoratuz, sistema materialean auk-eratu dugun erreferentziazko puntuan, erreferentzia sistemak norabide nagusien orientazioaduen kasuan, puntu honi lotuta eta norabide nagusien orientazioa duen inertzi tentsorearenmatrizea diagonala da:

9 SISTEMAREN DINAMIKA 29
Iε 0 00 Iη 00 0 Iρ
Eta sistemaren biraketa abiadura norabide nagusi batean ematen bada, adibidez ~uε nor-abidean, honela espresatu ahal izango genuke: ~w = wε · ~uε. Ondorioz, espresio matrizialosoa:
Lε
Lη
Lρ
=
Iε 0 00 Iη 00 0 Iρ
·
wε
00
=
Iε · wε
00
Eta hemendik momentu zinetikoak norabide nagusietan dituen osagaiak kalkulatu ditza-kegu:
Lε = Iε · wε ; Lη = 0 ; Lρ = 0
Kasu honetan, ~L eta ~w bektoreak lerrokideak direnez, espresio matriziala hurrengo formabektorialean adierazi dezakegu:
~L = Iε · ~w
Non, Iε sistemaren inertzi momentu nagusia den. Hau da, sistema materialak ε norabidenagusiarekiko duen inertzi momentua, ondorioz, balioa hau eskalarra da.
9.5.2. SISTEMA ZURRUN BATEN MOMENTU ZINETIKOAREN ALDAKUNTZARENTEOREMA, HIGIDURAN DAGOEN EDOZEIN PUNTUREKIKO
Bedi, n partikula materialekin osatutako sistema materiala. Partikula bakoitzak izangoduen masa mi hizkiekin izendatuko dugu. Honela, sistema materialak, sistemarekiko kan-pokoa den edozein P puntu batekiko duen momentu zinetikoa kalkulatuko dugu. Puntu hau,orokorrean higiduran dagoela suposatuko dugu, bere abiadura ~vP izango delarik (8. irudia):
ir�
P
Pv�
iv�
mi
Figura 8: mi masa duen partikulak, P puntuarekiko duen momentu zinetikoa

9 SISTEMAREN DINAMIKA 30
Honela, sistemaren momentu zinetikoa:
~LP =i=n∑
i=1
~ri ∧mi · ~vi
Espresio hau denborarekiko deribatuz:
d~LP
dt=
i=n∑
i=1
(
d~ri
dt∧mi · ~vi + ~ri ∧
d(mi · ~vi)
dt
)
Eta orokorrean, mi masa duen partikula eta P puntuak duten abiadurak erlazionatzendituen ekuazioa hau denez:
~vi = ~vP +d~ri
dt=⇒
d~ri
dt= ~vi − ~vP
Eta beste alde batetik, mi masa duen partikulari higidura kantitatearen aldakuntza teore-ma aplikatzen badiogu:
d(mi · ~vi)
dt= ~F k
i + ~F bi
Beraz, momentu zinetikoaren deribatua:
d~LP
dt=
i=n∑
i=1
[
(~vi − ~vP ) ∧mi · ~vi
]
+i=n∑
i=1
[
~ri ∧ (~F ki + ~F b
i )]
Ekuazio honetan:
~vi ∧mi · ~vi = ~0 da, bi bektore lerrokide direlako.
i=n∑
i=1
(
~ri ∧ ~F bi
)
= ~0 da, barne indarrek duten ezaugarriengatik.
d~LP
dt= −~vP ∧
i=n∑
i=1
(
mi · ~vi) +i=n∑
i=1
(
~ri ∧ ~F ki
)
d~LP
dt= ~MP (~F k) + ~P ∧ ~vP (5)
Sistema baten momentu zinetikoaren aldakuntza higiduran dagoen P puntu batekiko hur-rengo bi batugaiekin kalkulatu daiteke: lehenengoa, sisteman eragiten duten kanpo indarrekP puntuarekiko sortzen duten momentua da, eta bigarrena, sistema materialaren momentulineala eta P puntuak duen abiaduraren arteko biderketa bektoriala da.
Teorema hau, momentu zinetikoaren aldakuntzaren teorema orkorra da, eta berau edozeinpuntutan aplikatu daiteke. Honela, hurrengo kasu bereziak aipatu ditzakegu:

9 SISTEMAREN DINAMIKA 31
1. Erreferentziatzat hartutako 0 puntua ez bada mugitzen, hau da, puntu finkoa izatenbada, momentu zinetikoaren aldakuntza adierazten digun (5). ekuazioan, berdinketareneskubitan dagoen bigarren batugaia anulatu egiten da, ~v0 = ~0 delako.
Ondorioz, momentu zinetikoaren aldakuntzaren adierazpena P puntu finko bateanoinarrituta:
d~L0
dt= ~M0(~F k)
2. Kasu honetan, sistema materialaren G masen zentroan oinarritzen bagara, (5). ekuazioan,berdinketaren eskubitan dagoen bigarren batugai zero izango da, orain, ( ~P = M · ~vG)eta ~vG bektoreak lerrokideak direnez, hauen arteko biderketa bektoriala zero delako.
Kasu honetan momentu zinetikoaren adierazpena G sistemaren masen zentroarekiko:
d~LG
dt= ~MG(~F k)
9.5.3. MOMENTU ZINETIKOAREN KONTSERBAZIO LEGEA
Momentu zinetikoa konstante mantenduko da hurrengo bi kasuetan:
1. Sistema materialean aplikatuta dauden kanpo indar guztiek 0 puntu finko batekikoegiten duten momentuen erresultantea zero izaten bada:
~M0(~F k) = ~0 =⇒d~L0
dt= ~0 =⇒ ~L0 = Ktea.
2. Sistema materialean aplikatuta dauden kanpo indarrek, ε ardatz batekiko egiten dutenmomentuen erresultantea zero izaten bada:
Mε(~F k) = 0 =⇒dLε
dt= 0 =⇒ L0 = Ktea.
9.6. SISTEMA (SOLIDO ZURRUNA) BATEN ENERGIA ZINETIKOA
Bedi, M masa osoa eta G masen zentroa duen solido zurruna. Honela, sitema hau n par-tikula materialekin osatuta dagoela suposatuko dugu.
Orokorrean, sistema hau osatzen duen mi masadun partikula materialak duen energiazinetikoa:
Ti =1
2mi · v
2
i =1
2mi · (~vi · ~vi)
Honela, solido zurrunekoa den P puntu batek duen abiadura ezagutzen badugu, hurrengoekuazioa planteatu dezakegu (9. irudia):
~vi = ~vP + ~w ∧ ~ri

9 SISTEMAREN DINAMIKA 32
X
Y
Z
ir�
mi
G
P
w�
Figura 9: mi masa duen partikulak, P puntuarekiko duen abiadura
Emaitza hau, mi masa duen partikula puntualaren energia zinetikoa kalkulatzeko erabilidugun ekuazioan ordezkatzen badugu:
Ti =1
2mi · v
2
i =1
2mi · (~vP + ~w ∧ ~ri) · (~vP + ~w ∧ ~ri)
Eta hemendik:
Ti =1
2mi · (~vP · ~vP ) + ~vP · (~w ∧ ~ri) ·mi +
1
2(~w ∧ ~ri) · (~w ∧ ~ri) ·mi
Honela, sistema osoak duen energia zinetikoa, partikula guztiei dagokien energia zinetikoarenbatura izango da:
T =1
2(~vP · ~vP ) ·
i=n∑
i=1
mi + ~vP ·(
~wi=n∑
i=1
~ri ·mi
)
+1
2
i=n∑
i=1
[
(~w ∧ ~ri) · (~w ∧ ~ri) ·mi
]
Aztertzen ari garen sistema materiala jarraia izaten bada, batukariak integral eta masapuntualak masa diferentzial bihurtzen dira:
T =1
2M(~vP · ~vP ) + ~vP ·
(
~w
∫
~ri dm)
+1
2
∫ [
(~w ∧ ~ri) · (~w ∧ ~ri) dm]
Espresio honetako azkenengo batugaia transformatu egiten badugu:
(~w ∧ ~ri) · (~w ∧ ~ri) = (~w · ~ri · ~w ∧ ~ri)︸ ︷︷ ︸
biderketa mistoa
= (~ri · ~w ∧ ~ri · ~w) =(
~ri ∧ (~w ∧ ~ri))
· ~w
Ondorioz:
T =1
2M(~vP · ~vP ) + ~vP ·
(
~w
∫
~ri dm)
+1
2· ~w
∫
~ri ∧ (~w ∧ ~ri)dm

9 SISTEMAREN DINAMIKA 33
Egin dezagun espresio honen hurrengo sailkapena, P puntuaren arabera:
1. Suposatu dezagun P puntua sistema materialekoa dela, eta gainera finkoa, hau da 0puntua dela.
~vP = ~v0 = ~0
T =1
2· ~w
∫
~ri ∧ (~w ∧ ~ri)dm =1
2· ~w · ~L0
~L0 inertzi momentua, inertzi tentsorearen funtzioan adierazten badugu:
T =1
2·(
wx wy wz
)
·
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
·
wx
wy
wz
Espresio matrizial hau garatuz:
T =1
2Ixx w2
x +1
2Iyy w2
y +1
2Izz w2
z + Ixy wx wy + Ixz wx wz + Iyz wy wz
Aukeratu dugun erreferentzia sistemak, norabide nagusiak izango balitu:
T =1
2Iε w2
ε +1
2Iη w2
η +1
2Iρ w2
ρ
2. Suposatu dezagun orain, P puntua sistema materialaren masen zentroa dela, hots, G
puntu dela.
~vP = ~vG
Bestalde, energia zinetikoarentzat lortu dugun ekuazioan, berdinketaren eskuinetan da-goen bigarren batugaian
∫
~ri dm dago biderkatzen. Kasu honetan, ~ri kokapen bektoreguztiak sistema materialaren G masen zentrotik hartuta daudenez,
∫
~ri dm = ~0 da,ondorioz:
T =1
2M · ~v2
G +1
2· ~w · ~LG
Lortu dugun ekuazioak, Koeinig-ek energia zinetikoarentzat enuntziatu zuen teoremaerrepresentatzen du, honen arabera: higiduran dagoen sistema baten energia zinetikoabi batugaiekin osatuta dago: lehenegoa, sistema materialaren masa guztia honen masenzentroan kontzentratua dagoela suposatuz, puntu hau translazioan izateagatik duen en-ergia zinetikoa da, eta bigarrena, sistema materialak bere masen zentroaren inguruan

9 SISTEMAREN DINAMIKA 34
biratzeagatik duen biraketa energia.
Puntu finkoarentzat aplikatu dugun prozedura analogoa jarraituz, energia zinetikoamasen zentroari lotuta dagoen inertzi tentsorearen funtzioan espresatu dezakegu formamatrizialean:
T =1
2M · v2
G +1
2
(
wx wy wz
)
·
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
·
wx
wy
wz
Espresio hau garatuz:
T =1
2M · v2
G +1
2Ixx w2
x +1
2Iyy w2
y +1
2Izz w2
z + Ixy wx wy + Ixz wx wz + Iyz wy wz
Bestalde, inertzi tentsorea G puntuari lotuta egoteaz gain, norabide nagusien orien-tazioa izaten badu, energia zinetikoaren ekuazioa:
T =1
2M · v2
G +1
2Iε w2
ε +1
2Iη w2
η +1
2Iρ w2
ρ
9.6.1. SISTEMA (SOLIDO ZURRUNA) BATEN ENERGIA ZINETIKOAREN AL-DAKUNTZAREN TEOREMA
Sistema materiala osatzen duten n partikula materialetatik, orokorrean mi masa duen par-tikulari energia zinetikoaren aldakuntzaren teorema aplikatuko diogu modu diferentzialean:
d(mi · v2
i )
2= ~Fi · d~r = dWi
Kontuan izanda partikula bakoitzean eragiten duten indarrak sistemarekiko kanpo etabarne indarrak direla:
d(mi · v2
i )
2= dW k
i + dW bi
Ekuazio hau, sistema osatzen duten partikula guztiei aplikatzen badugu:
d( i=n∑
i=1
mi · v2
i
)
2= d
i=n∑
i=1
W ki + d
i=n∑
i=1
W bi = dT
Ekuazio honek, sistema materialaren energia zinetikoaren aldakuntzaren teorema espre-satzen du modu diferentzialean. Honen integrazioa egiten badugu:
9 SISTEMAREN DINAMIKA 35
T2 − T1 =i=n∑
i=1
W ki +
i=n∑
i=1
W bi =⇒ ∆T =
i=n∑
i=1
W ki +
i=n∑
i=1
W bi
Emaitza hau honela enuntziatu dezakegu: sistema batek, denbora tarte batean, bere de-splazamenduan jasaten duen energia zinetikoaren aldakuntza, eta sistema horretan, denboratarte berean kanpo eta barne indarrek sortzen duten lanen batura, berdinak dira.
Aurretik ikusi ditugun teorematan ez bezala, teorema honetan sistema materialean ap-likatuta dauden barne indarrak kontuan izan behar ditugu.
Halaber, kasu berezi batzuetan barne indarrek egiten duten lana zero da. Ikus ditzagunadibide batzuk:
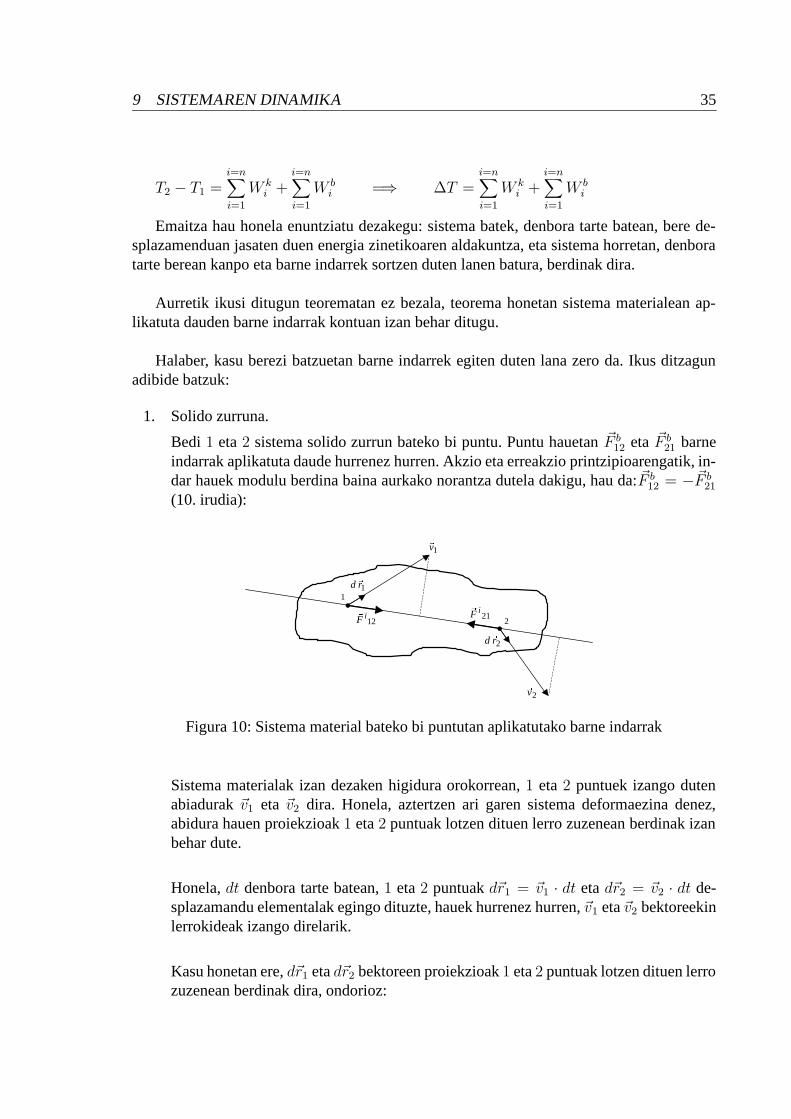
1. Solido zurruna.
Bedi 1 eta 2 sistema solido zurrun bateko bi puntu. Puntu hauetan ~F b12
eta ~F b21
barneindarrak aplikatuta daude hurrenez hurren. Akzio eta erreakzio printzipioarengatik, in-dar hauek modulu berdina baina aurkako norantza dutela dakigu, hau da: ~F b
12= −~F b
21
(10. irudia):
1
212iF
�
21iF
�
1v�
2v�
1rd�
2rd�
Figura 10: Sistema material bateko bi puntutan aplikatutako barne indarrak
Sistema materialak izan dezaken higidura orokorrean, 1 eta 2 puntuek izango dutenabiadurak ~v1 eta ~v2 dira. Honela, aztertzen ari garen sistema deformaezina denez,abidura hauen proiekzioak 1 eta 2 puntuak lotzen dituen lerro zuzenean berdinak izanbehar dute.
Honela, dt denbora tarte batean, 1 eta 2 puntuak d~r1 = ~v1 · dt eta d~r2 = ~v2 · dt de-splazamandu elementalak egingo dituzte, hauek hurrenez hurren, ~v1 eta ~v2 bektoreekinlerrokideak izango direlarik.
Kasu honetan ere, d~r1 eta d~r2 bektoreen proiekzioak 1 eta 2 puntuak lotzen dituen lerrozuzenean berdinak dira, ondorioz:

9 SISTEMAREN DINAMIKA 36
W12(~F b) = ~F b12· d~r1 + ~F b
21· d~r2 = F b
12· Proiek−→
12d~r1 + F b
21· Proiek−→
21d~r2 = 0
Barne indarrek egiten duten lana, sistema osatzen duten puntu pare guztiei aplikatzenbadiegu eta ondoren lan osoaren batura kalkulatu, sistema deformaezin batean ap-likatuta dauden barne indarrak egiten duten lana zero dela frogatu dezakegu, hau da:
∆T =i=n∑
i=1
W ki
2. Lotura idealekin osatutako sistema materiala.
Kasu honetan, solido zurrunekin osatutako sistema edo multzo mekanikoak ditugulasuposatuko dugu, baina berezitasun batekin: lotura guztiak idealak direla, hau da, lo-turetan ez direla marruskadura indarrak sortzen. Kasu honetan, une guztietan loturaindarrek sortzen duten lana zero izango da.
Hau da, loturetan ez badira marruskadura indarrak sortzen, lotura indarrak kontaktu-arekiko normalak izango dira eta loturetan sortu daitezken higidurak, erreakzio nor-malekiko elkarzutak izango dira. Ondorioz, sortu dezaketen lana zero da. Arrazoi ho-nengatik, lotura idealak izan eta solido deformaezinekin osatuta dauden sistematan ere,hurrengo ekuazioa aplikatu dezakegu:
∆T =i=n∑
i=1
W ki
9.7. SISTEMAREN HIGIDURAREN ZAZPI EKUAZIO UNIBERT-SALAK
Sistemaren dinamikarentzat oinarrizko teoremen bitartez egindako azterketaren laburpenbezala, zera ondorioztatu dezakegu:
Higidura kantitatearen teorema, edo ikusi dugun bezala, bere baliokidea den masenzentroaren teoremaren aplikaziotik, ekuazio bektorial bat, eta ondorioz hiru ekuzioeskalar lortu ditzakegu:
d~P
dt=
d( i=n∑
i=1
mi · ~vi
)
dt=
i=n∑
i=1
~F ki =⇒
dPx
dt= F k
x
dPy
dt= F k
y
dPz
dt= F k
z
9 SISTEMAREN DINAMIKA 37
Momentu zinetikoaren teoremaren aplikazioarekin ere, ekuazio bektorial bat, eta on-dorioz hiru ekuzio eskalar lortu ditzakegu:
d~L
dt=
d( i=n∑
i=1
~ri ∧mi · ~vi
)
dt=
i=n∑
i=1
~M(~F ki ) =⇒
dLx
dt= Mx(F
k)
dLy
dt= My(F
k)
dLz
dt= Mz(F
k)
Azkenik, energia zinetikoaren teoremaren aplikazioarekin ekuazio eskalar bat lortudezakegu:
dT =
d( i=n∑
i=1
m · v2
i
)
2= d
i=n∑
i=1
W ki + d
i=n∑
i=1
W bi
Zazpi ekuazio eskalar hauekin osatutako multzoak, sistemaren higiduraren ekuazio unib-ertsalak izendapena hartzen du.
Aipatzekoa da, lehenengo sei ekuazioetan soilik sistemarekiko kanpo indarrak eragitendutela, eta azkenengo ekuazioan, orokorean, kanpo indarrez gain, barne indarrak ere eragitendutela. Nahiz eta jakin, sistema materiala solido deformaezina izanten bada, edo solido de-formaezinekin osatutako multzoa den kasuan, lotura idealak dituenean, barne indarrek ezdutela eraginik energia zinetikoaren teoreman.
10 ARDATZ FINKO BATEN INGURUAN BIRATZEN ARI DEN SOLIDOARENDINAMIKA. BERMAPUNTUETAKO ERREAKZIOAK. OREKA ESTATIKO ETADINAMIKOA 38
10. ARDATZ FINKO BATEN INGURUAN BIRATZEN ARIDEN SOLIDOAREN DINAMIKA. BERMAPUNTUE-TAKO ERREAKZIOAK. OREKA ESTATIKO ETA DI-NAMIKOA
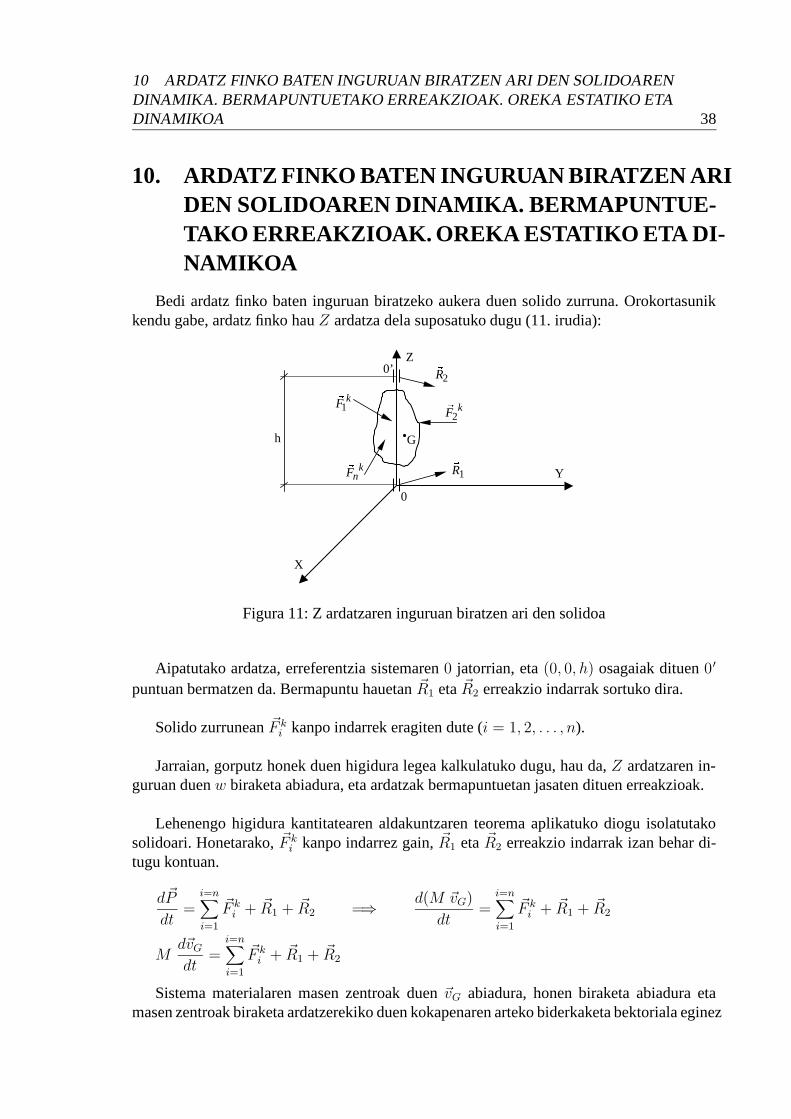
Bedi ardatz finko baten inguruan biratzeko aukera duen solido zurruna. Orokortasunikkendu gabe, ardatz finko hau Z ardatza dela suposatuko dugu (11. irudia):
knF
�
1R�
kF2
�
2R�
kF1
�
h
0’Z
Y
X
0
G
Figura 11: Z ardatzaren inguruan biratzen ari den solidoa
Aipatutako ardatza, erreferentzia sistemaren 0 jatorrian, eta (0, 0, h) osagaiak dituen 0′
puntuan bermatzen da. Bermapuntu hauetan ~R1 eta ~R2 erreakzio indarrak sortuko dira.
Solido zurrunean ~F ki kanpo indarrek eragiten dute (i = 1, 2, . . . , n).
Jarraian, gorputz honek duen higidura legea kalkulatuko dugu, hau da, Z ardatzaren in-guruan duen w biraketa abiadura, eta ardatzak bermapuntuetan jasaten dituen erreakzioak.
Lehenengo higidura kantitatearen aldakuntzaren teorema aplikatuko diogu isolatutakosolidoari. Honetarako, ~F k
i kanpo indarrez gain, ~R1 eta ~R2 erreakzio indarrak izan behar di-tugu kontuan.
d~P
dt=
i=n∑
i=1
~F ki + ~R1 + ~R2 =⇒
d(M ~vG)
dt=
i=n∑
i=1
~F ki + ~R1 + ~R2
Md~vG
dt=
i=n∑
i=1
~F ki + ~R1 + ~R2
Sistema materialaren masen zentroak duen ~vG abiadura, honen biraketa abiadura etamasen zentroak biraketa ardatzerekiko duen kokapenaren arteko biderkaketa bektoriala eginez

10 ARDATZ FINKO BATEN INGURUAN BIRATZEN ARI DEN SOLIDOARENDINAMIKA. BERMAPUNTUETAKO ERREAKZIOAK. OREKA ESTATIKO ETADINAMIKOA 39
kalkulatu dezakegu:
~vG = ~w ∧ ~rG =
∣∣∣∣∣∣∣
~i ~j ~k
0 0 w
xG yG zG
∣∣∣∣∣∣∣
= −w yG~i + w xG
~j =dxG
dt~i +
dyG
dt~j
Espresio hau deribatuz:
d~vG
dt= −
(dw
dtyG + w
dyG
dt
)
~i +(dw
dtxG + w
dxG
dt
)
~j
Emaitza hau, higidura kantitatearen aldakuntza teoreman aplikatu eta ardatz cartesiar-retan proiektatuz, hurrengo ekuazioak lortuko ditugu:
− M yG
dw
dt− M w
dyG
dt= F k
x + R1x+ R2x
M xG
dw
dt+ M w
dxG
dt= F k
y + R1y+ R2y
0 = F kz + R1z
+ R2z
(6)
Orain, 0 puntuari lotuta dagoen momentu zinetikoaren aldakuntzaren teorema aplikatukodiogu isolatutako sistema materialari.
d~L0
dt=
i=n∑
i=1
~M0(~F ki )
Honela, sistema materialean eragiten duten ~F ki kanpo indarrek 0 puntuarekiko egiten
duten momentua:
~M0 = Mx~i + My
~j + Mz~k
Bestalde, bermapuntuetan aplikatuta dauden kanpo indarrek 0 puntuarekiko sortzen dutenmomentua:
~M0(~R1) = ~0
~M0(~R2) = ~r ∧ ~R2 = (0~i + 0 ~j + h ~k) ∧ (R2x
~i + R2y
~j + R2z
~k) =
∣∣∣∣∣∣∣
~i ~j ~k
0 0 h
R2xR2y
R2z
∣∣∣∣∣∣∣
~M0(~R2) = − h R2y
~i + h R2x
~j
Ondorioz, momentu zinetikoaren aldakuntzaren teorema honela adierazi dezakegu:
d~L0
dt= (Mx − h R2y
)~i + (My + h R2x)~j + Mz
~k

10 ARDATZ FINKO BATEN INGURUAN BIRATZEN ARI DEN SOLIDOARENDINAMIKA. BERMAPUNTUETAKO ERREAKZIOAK. OREKA ESTATIKO ETADINAMIKOA 40
Bestalde, momentu zinetikoaren espresio orkorra:
~L0 =
Ix Ixy Ixz
Iyx Iy Iyz
Izx Izy Iz
·
00w
=
Ixz · wIyz · wIz · w
= Ixz · w~i + Iyz · w ~j + Iz · w ~k
Lortutako emaitza hau denborarekiko deribatuz:
d~L0
dt=(
Ixz
dw
dt+
dIxz
dtw)
~i +(
Iyz
dw
dt+
dIyz
dtw)
~j + Iz
dw
dt~k
Emaitza honetan, dIz
dt= 0 dela kontuan izan dugu, sistema materialak Z ardatzaren ingu-
ruan biratzean, bere kokapena ardatz honekiko ez delako aldatzen.
ρθ t y
x
0’Z
Y
X
0 z = Ktea
Figura 12: Sistema materialeko edozein punture x eta y koordenatuen adierazpena koorde-natu esferikoetan
Kontuan izanda partikula material bakoitzak duen masa eta z kokapena konstate dituela,inertzi biderkadurak garatuko ditugu 1 :
dIxz
dt=
d
dt
i=n∑
i=1
x z m =i=n∑
i=1
z mdx
dt= − w
i=n∑
i=1
z m y = − w Iyz
1Hurrengo ekuazioetan dxdt
= −w y eta dy
dt= w x emaitzak ordezkatzen dira. Berdinketa hauek 12.
irudian oinarrituz ondorioztatu ditzakegu:
x = ρ cos θt eta y = ρ sin θt
dx
dt= −ρ sin θt
dθ
dt= −w ρ sin θt = − w y
dy
dt= ρ cos θt
dθ
dt= w ρ cos θt = w x

10 ARDATZ FINKO BATEN INGURUAN BIRATZEN ARI DEN SOLIDOARENDINAMIKA. BERMAPUNTUETAKO ERREAKZIOAK. OREKA ESTATIKO ETADINAMIKOA 41
dIyz
dt=
d
dt
i=n∑
i=1
y z m =i=n∑
i=1
z mdy
dt= w
i=n∑
i=1
z m x = w Ixz
Ondorio hauek momentu zinetikoaren aldakuntza teoreman ordezkatzen baditugu:
d~L0
dt=(
Ixz
dw
dt− w2 Iyz
)
~i +(
Iyz
dw
dt+ w2 Ixz
)
~j + Iz
dw
dt~k
Emaitza bektorial hau, ardatz koordenatuetan proiektatzen badugu, hurrengo hiru ekuazioeskalarrak lortuko ditugu:
Ixz
dw
dt− w2 Iyz = Mx − h R2y
Iyz
dw
dt+ w2 Ixz = My + h R2x
Iz
dw
dt= Mz
(7)
Erreparatu dezagun orain, (6) eta (7) multzoetan dauden sei ekuazioetan.
(7). multzoko azkenengo ekuazioak solido zurrunaren higidura zehazten du. Ekuaziohau, eta momentu zinetikoaren teoremaren proiekzioa ardatz batean berdinak dira.
Gainontzeko 5 ekuazioak, ezezagunak diren erreazio indarren 6 osagaiak erlazionatzendituzte, beraz, soilik ekuazio hauek erabiliz ezingo dugu erreakzio indarren osagaiak kalku-latu. Honetarako, estatikan egiten dugun bezala, baldintza gehigarri bat aplikatu behar dugu,adibidez, bi bermapuntuetatik batek bakarrik jasan ditzakela esfortzu axialak Z ardatzarennorabidean.
Bestalde, egoera dinamikoan bermapuntuetan sortzen diren erreakzioak eta egoera es-tatikoan sortzen direnak berdinak izateko, baldintza jakin batzuk bete behar dira. Jarraian,higidura edo pausagune egoeran erreakzioak berdinak izateko bete behar diren baldintzahoiek definituko ditugu:
1. Une guztietan xG = yG = 0 izatea; baldintza honek, sistema materialaren masenzentroa Z biraketa ardatzean egotera derrigortzen du. Baldintza hau ematen denean,solidoak ardatzarekiko oreka estatikoa duela esaten da.
2. Une guztietan Ixz = Iyz = 0 izatea; honen arabera, Z ardatzak norabide nagusia du,eta Iz inertzi momentu nagusia da. Baldintza hau ematen bada, solidoa Z ardatzarekikodinamikoki orekatua dagoela esaten da.
Bi baldintza hauek betetzen badira, 5 ekuzioa hauek, jadanik ezagutzen ditugun orekaekuazioetan bihurtzen dira.
11 EULERREN HIGIDURA EKUAZIOAK 42
11. EULERREN HIGIDURA EKUAZIOAK
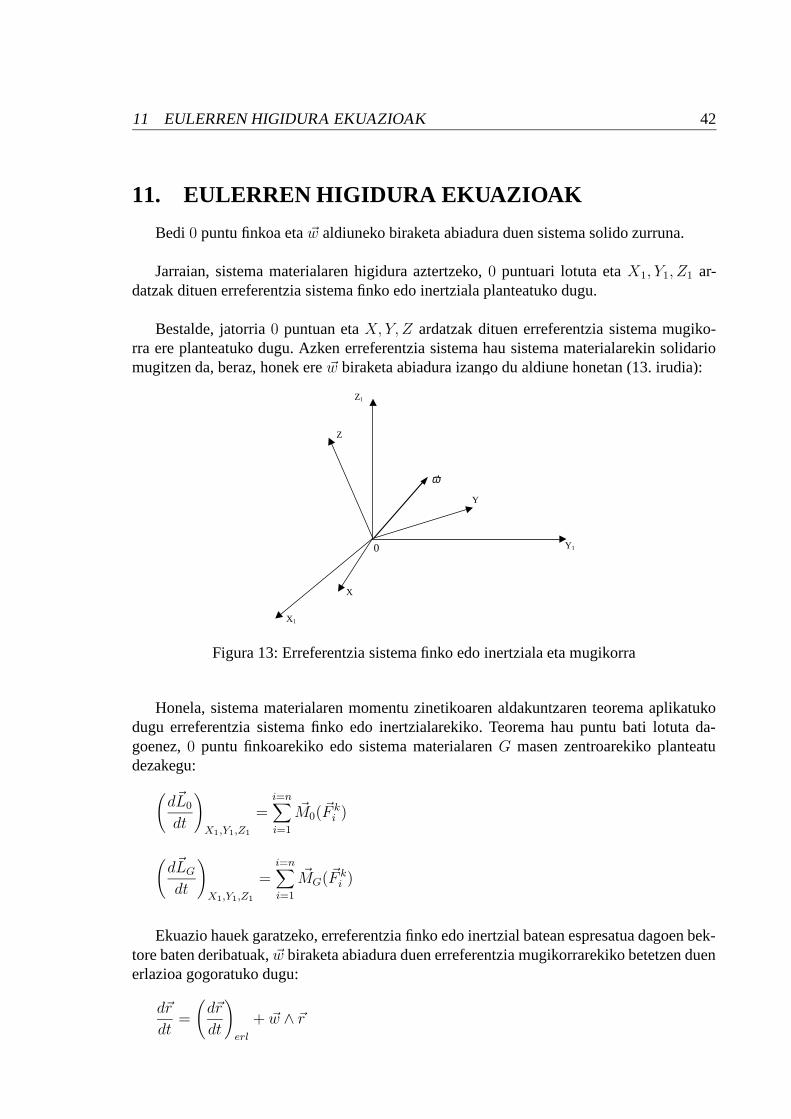
Bedi 0 puntu finkoa eta ~w aldiuneko biraketa abiadura duen sistema solido zurruna.
Jarraian, sistema materialaren higidura aztertzeko, 0 puntuari lotuta eta X1, Y1, Z1 ar-datzak dituen erreferentzia sistema finko edo inertziala planteatuko dugu.
Bestalde, jatorria 0 puntuan eta X, Y, Z ardatzak dituen erreferentzia sistema mugiko-rra ere planteatuko dugu. Azken erreferentzia sistema hau sistema materialarekin solidariomugitzen da, beraz, honek ere ~w biraketa abiadura izango du aldiune honetan (13. irudia):
Z1
Y1
X1
Z
Y
X
ω�
0
Figura 13: Erreferentzia sistema finko edo inertziala eta mugikorra
Honela, sistema materialaren momentu zinetikoaren aldakuntzaren teorema aplikatukodugu erreferentzia sistema finko edo inertzialarekiko. Teorema hau puntu bati lotuta da-goenez, 0 puntu finkoarekiko edo sistema materialaren G masen zentroarekiko planteatudezakegu:
(
d~L0
dt
)
X1,Y1,Z1
=i=n∑
i=1
~M0(~F ki )
(
d~LG
dt
)
X1,Y1,Z1
=i=n∑
i=1
~MG(~F ki )
Ekuazio hauek garatzeko, erreferentzia finko edo inertzial batean espresatua dagoen bek-tore baten deribatuak, ~w biraketa abiadura duen erreferentzia mugikorrarekiko betetzen duenerlazioa gogoratuko dugu:
d~r
dt=
(
d~r
dt
)
erl
+ ~w ∧ ~r

11 EULERREN HIGIDURA EKUAZIOAK 43
Erlazio hau, planteatu berri dugun ekuazioetan aplikatzen badugu:
(
d~L0
dt
)
X,Y,Z
+ ~w ∧ ~L0 =i=n∑
i=1
~M0(~F ki )
(
d~LG
dt
)
X,Y,Z
+ ~w ∧ ~LG =i=n∑
i=1
~MG(~F ki )
Espresio hauen garapena 0 edo G azpindizeak kontuan izan gabe egingo dugu, nahizeta garapenaren amaieran gogoratuko dugun bezala, ekuazio hau soilik 0 eta G puntuetanaplikatu daitekeen. Bestalde, kontuan izan behar dugu, definizioz sistema materiala errefer-entzia sistema mugikorrarekiko ez denez mugitzen, erreferentzia mugikorrarekiko espresatuadagoen inertzi tentsorearen matrizea konstantea mantentzen dela denboran zehar.
(
d({I} · ~w)
dt
)
X,Y,Z
+ ~w ∧ ({I} · ~w) =i=n∑
i=1
~M(~F ki )
Ix Ixy Ixz
Iyx Iy Iyz
Izx Izy Iz
·
wx
wy
wz
+
(
wx wy wz
)
∧
Ix wx + Ixy wy + Ixz wz
Iyx wx + Iy wy + Iyz wz
Izx wx + Izy wy + Iz wz
=
Mx
My
Mz
Mx
My
Mz
=
Ix wx + Ixy wy + Ixz wz
Iyx wx + Iy wy + Iyz wz
Izx wx + Izy wy + Iz wz
+
+
∣∣∣∣∣∣∣
~i ~j ~k
wx wy wz
Ix wx + Ixy wy + Ixz wz Iyx wx + Iy wy + Iyz wz Izx wx + Izy wy + Iz wz
∣∣∣∣∣∣∣
Norabide bera duten osagaiak berdinduz:
Mx = Ix wx − (Iy − Iz) wy wz + Ixy(wy − wz wx) + Iyz(w2
y −w2
z) + Izx(wz + wx wy)
My = Iy wy − (Iz − Ix) wz wx + Iyz(wz − wx wy) + Izx(w2
z −w2
x) + Ixy(wx + wy wz)
Mz = Iz wz − (Ix − Iy) wx wy + Izx(wx − wy wz) + Ixy(w2
x −w2
y) + Iyz(wy + wz wx)
Aukeratutako erreferentzia sistema mugikorrak norabida nagusiak izango balitu, inertzibiderkadurak anulatu egingo lirateke, ondorioz:

11 EULERREN HIGIDURA EKUAZIOAK 44
Mx = Ix wx − (Iy − Iz) wy wz
My = Iy wy − (Iz − Ix) wz wx
Mz = Iz wz − (Ix − Iy) wx wy
Ekuazio hauek, sistema materialen higidura aztertzen duten Euler-en ekuazioak dira.Hauen aplikazioa, 0 puntu finko edota G masen zentrora mugatuta dago. Hau da, erref-erentzia sistema mugikorraren jatorria 0 edo G puntua izan behar dela, eta kanpo indar-rek egiten duten momentua, aukeratutako erreferentzia sistema mugikorraren jatorriarekikokalkulatu behar direla.