
Controlador del motor CMMP-AS--M3 - festo.com · cmmp-as-c10-11a-p3-m3 3 16 b16 1) Elfusible...
112
Descripción Montaje e instalación para el controlador del motor CMMP-AS-...-M3 760323 1203NH Controlador del motor CMMP-AS-...-M3
Transcript of Controlador del motor CMMP-AS--M3 - festo.com · cmmp-as-c10-11a-p3-m3 3 16 b16 1) Elfusible...

Descripción
Montaje e instalación
para el controlador
del motor
CMMP-AS-...-M3
760323
1203NH
Controlador del motor
CMMP-AS-...-M3

CMMP-AS-...-M3
2 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Traducción del manual original
GDCP-CMMP-M3-HW-ES
CANopen®, Heidenhain®, EnDat®, PHOENIX® son marcas registradas de los propietarios correspon-
dientes de las marcas en determinados países.
Identificación de peligros e indicaciones para evitarlos:
PeligroPeligros inminentes que pueden ocasionar lesiones graves e incluso la muerte.
AdvertenciaPeligros que pueden ocasionar lesiones graves e incluso la muerte.
AtenciónPeligros que pueden ocasionar lesiones leves o daños materiales graves.
Otros símbolos:
NotaDaños materiales o pérdida de funcionalidad.
Recomendaciones, sugerencias y referencias a otras fuentes de documentación.
Accesorios indispensables o convenientes.
Información sobre el uso de los productos respetuoso con el medio ambiente.
Identificadores de texto:
• Actividades que se pueden realizar en cualquier orden.
1. Actividades que se tienen que realizar en el orden indicado.
– Enumeraciones generales.

CMMP-AS-...-M3
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 3
Contenido – CMMP-AS-...-M3
1 Seguridad y requerimientos para el uso del producto 8. . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Seguridad 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Indicaciones de seguridad para la puesta a punto, reparación y puesta fuera
de servicio. 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Protección mediante tensión baja de protección (PELV) contra descarga eléctrica 9
1.1.3 Uso previsto 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Requerimientos para el uso del producto 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Requerimientos técnicos 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Cualificaciones del personal técnico (requerimientos que debe cumplir el personal) 10
1.2.3 Aplicaciones y certificaciones 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.4 Reparaciones y eliminación 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Resumen del producto 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 El sistema completo CMMP-AS-...-M3 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Dotación del suministro 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Vista del aparato 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Fusible para la red 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Instalación mecánica 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Notas importantes 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Montaje 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Módulo en la posición de enchufe Ext3 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Interfaz en posición de enchufe Ext1 o Ext2 (opcional) 21. . . . . . . . . . . . . . . . . . . . . .
3.2.3 Controlador del motor 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Instalación eléctrica 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Asignación de conectores enchufables 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Conexión: comunicación I/O [X1] 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Conector [X1] 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Asignación de clavijas [X1] 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Conexión: resolver [X2A] 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Conector [X2A] 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Asignación de clavijas [X2A] 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Conexión: encoder [X2B] 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 Conector [X2B] 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 Asignación de clavijas [X2B] 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

CMMP-AS-...-M3
4 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
4.5 Conexión: bus CAN [X4] 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Conector [X4] 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Asignación de clavijas [X4] 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Conexión: motor [X6] 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.1 Conector [X6] 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.2 Asignación de clavijas [X6] 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7 Conexión: fuente de alimentación [X9] 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.1 Conector 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.2 Asignación de clavijas [X9] – monofásica 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.3 Asignación de clavijas [X9] – trifásica 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.4 Alimentación AC 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.5 Resistencia de frenado 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8 Conexión: entrada de encoder incremental [X10] 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8.1 Conector [X10] 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8.2 Asignación de clavijas [X10] 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8.3 Tipo y ejecución del cable [X10] 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8.4 Indicaciones de conexión [X10] 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9 Conexión: salida de encoder incremental [X11] 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9.1 Conector [X11] 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9.2 Asignación de clavijas [X11] 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.10 Instrucciones para una instalación segura y conforme a la EMC 42. . . . . . . . . . . . . . . . . . . . .
4.10.1 Explicaciones y conceptos 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.10.2Generalidades acerca de la EMC 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.10.3 Áreas EMC: primer y segundo entorno 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.10.4Cableado adecuado según EMC 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.10.5 Funcionamiento con cables de motor largos 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.10.6 Protección EDS 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Puesta a punto 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Instrucciones generales de conexión 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Interfaces FCT 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Resumen de interfaces 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.2 USB [X19] 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.3 Ethernet TCP/IP [X18] 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Herramienta/material 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Conexión del motor 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Conexión del controlador de motor CMMP-AS-...-M3 a la alimentación de corriente 48. . . . .
5.6 Conexión del PC 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7 Comprobación de disponibilidad para funcionar 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CMMP-AS-...-M3
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 5
6 Funciones de servicio y mensajes de diagnosis 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Funciones de protección y de servicio 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.1 Cuadro general 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.2 Detección de fallo de fase y de red 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.3 Control de sobrecorriente y cortocircuitos 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.4 Control de sobretensión del circuito intermedio 50. . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.5 Control de la temperatura para el disipador de calor 51. . . . . . . . . . . . . . . . . . . . . . . .
6.1.6 Control del motor 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.7 Control de I2t 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.8 Control de potencia para el interruptor chopper de frenado 51. . . . . . . . . . . . . . . . . .
6.1.9 Estado de puesta a punto 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.10Descarga rápida del circuito intermedio 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Mensajes de modo de funcionamiento y de diagnosis 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Elementos de mando e indicación 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.2 Visualizador de siete segmentos 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.3 Validación de mensajes de error 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.4 Mensajes de diagnosis 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Apéndice técnico 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas CMMP-AS-...-M3 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Interfaces 61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Especificaciones técnicas CAMC-… 65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Encoders compatibles 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.4 Componentes del controlador USB 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Mensajes de diagnosis 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

CMMP-AS-...-M3
6 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Identificación del producto, versiones
La presente descripción se refiere a las siguientes versiones:
– Controlador del motor a partir de Rev 01
– Plugin FCT CMMP-AS a partir de la versión 2.0.x.
Placa de características (ejemplo) Significado
CMMP-AS-C2-3A-M3
1501325 XXRev XX
In: 1*(100…230)V AC±10%
(50…60)Hz 3A
Out:3*(0…270)V AC
(0…1000)Hz 2,5A
Max surround air temp 40 °C
IND. CONT. EQ.
1UD1
Referencia CMMP-AS-C2-3A-M3
Nº de artículo 1501325
Número de serie XX
Versión de revisión Rev XX
Datos de entrada 100 … 230 V AC ±10%
50 … 60 Hz 3A
Datos de salida 0 … 270 V AC
0 … 1.000 Hz 2,5 A
Temperatura ambiente máx. 40 °C
Tab. 1 Placa de características CMMP-AS-C2-3A-M3
Asistencia técnica
Ante cualquier problema técnico, diríjase a su persona de contacto local de Festo.
CMMP-AS-...-M3
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 7
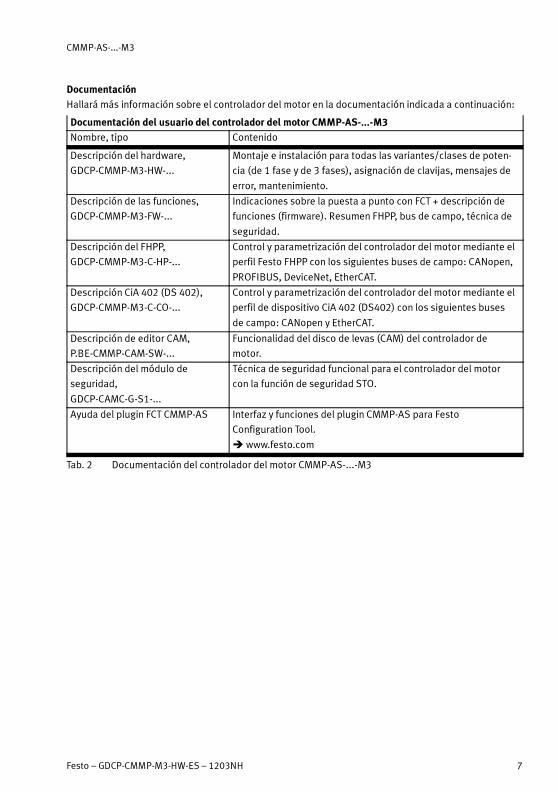
DocumentaciónHallará más información sobre el controlador del motor en la documentación indicada a continuación:
Documentación del usuario del controlador del motor CMMP-AS-...-M3Nombre, tipo Contenido
Descripción del hardware,
GDCP-CMMP-M3-HW-...
Montaje e instalación para todas las variantes/clases de poten-
cia (de 1 fase y de 3 fases), asignación de clavijas, mensajes de
error, mantenimiento.
Descripción de las funciones,
GDCP-CMMP-M3-FW-...
Indicaciones sobre la puesta a punto con FCT + descripción de
funciones (firmware). Resumen FHPP, bus de campo, técnica de
seguridad.
Descripción del FHPP,
GDCP-CMMP-M3-C-HP-...
Control y parametrización del controlador del motor mediante el
perfil Festo FHPP con los siguientes buses de campo: CANopen,
PROFIBUS, DeviceNet, EtherCAT.
Descripción CiA 402 (DS 402),
GDCP-CMMP-M3-C-CO-...
Control y parametrización del controlador del motor mediante el
perfil de dispositivo CiA 402 (DS402) con los siguientes buses
de campo: CANopen y EtherCAT.
Descripción de editor CAM,
P.BE-CMMP-CAM-SW-...
Funcionalidad del disco de levas (CAM) del controlador de
motor.
Descripción del módulo de
seguridad,
GDCP-CAMC-G-S1-...
Técnica de seguridad funcional para el controlador del motor
con la función de seguridad STO.
Ayuda del plugin FCT CMMP-AS Interfaz y funciones del plugin CMMP-AS para Festo
Configuration Tool.
www.festo.com
Tab. 2 Documentación del controlador del motor CMMP-AS-...-M3

1 Seguridad y requerimientos para el uso del producto
8 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
1 Seguridad y requerimientos para el uso del producto
1.1 Seguridad
1.1.1 Indicaciones de seguridad para la puesta a punto, reparación y puesta fuera de servicio.
AdvertenciaPeligro de descarga eléctrica.
– En caso de módulos no montados o placas ciegas en las posiciones de enchufe Ext1
… Ext3.
– En caso de cables no montados en los conectores [X6] y [X9].
– Al desconectar cables de conexión bajo tensión.
El contacto con piezas bajo tensión causa lesiones graves y puede provocar la muerte.
El producto solo debe hacerse funcionar montado y cuando se han tomado todas las
medidas de seguridad.
Antes de tocar piezas bajo tensión durante trabajos de mantenimiento, reparación y
limpieza así como durante interrupciones prolongadas de funcionamiento:
1. Dejar sin tensión el equipo eléctrico mediante el interruptor principal y asegurarlo
contra reconexiones.
2. Tras la desconexión es necesario esperar 5 minutos de tiempo de descarga y com-
probar que no haya tensión antes de acceder al controlador.
La funciones de seguridad generales no protegen de las descargas eléctricas (elec-
trocución), sino exclusivamente de los movimientos peligrosos.
NotaPeligro a causa de movimientos inesperados del motor o del eje.
– Asegúrese de que el movimiento no pone en peligro a nadie.
– Lleve a cabo un análisis de riesgos conforme a la directiva de máquinas.
– En base a dicho análisis de riesgos, diseñe el sistema de seguridad para toda la
máquina, incluyendo todos los componentes integrados. Entre ellos se cuentan
también los accionamientos eléctricos.
– No está permitido puentear dispositivos de seguridad.

1 Seguridad y requerimientos para el uso del producto
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 9
1.1.2 Protección mediante tensión baja de protección (PELV) contra descarga eléctrica
Advertencia• Para la alimentación eléctrica, utilice solamente circuitos PELV conformes con la
norma IEC/DIN EN 60204-1 (PELV = Protective Extra-Low Voltage, tensión ultra-baja
de protección).
Tenga también en cuenta los requisitos generales para circuitos PELV según
IEC/DIN EN 60204-1.
• Utilice sólo fuentes de alimentación que garanticen un aislamiento eléctrico de la
tensión de alimentación según IEC DIN EN 60204-1.
Al utilizar fuentes de alimentación PELV, se garantiza la protección ante descargas eléctricas
(protección contra contacto directo e indirecto), según IEC DIN EN 60204-1 (equipamiento eléctrico de
máquinas, requerimientos generales).
1.1.3 Uso previstoEl CMMP-AS-...-M3. sirve para ...
– el uso en armarios de maniobra para la alimentación de servomotores AC y la regulación de sus
pares (corriente), velocidad y posición.
El CMMP-AS-...-M3 está diseñado para el montaje enmáquinas o instalaciones automatizadas y debe
utilizarse exclusivamente:
– en perfecto estado técnico,
– en su estado original, sin modificaciones hechas por el usuario,
– dentro de los límites definidos en las especificaciones técnicas del producto ( apéndice
A Apéndice técnico),
– para uso industrial.
NotaEn caso de daños surgidos por manipulaciones no autorizadas o usos no previstos ex-
pirarán los derechos de garantía y de responsabilidad por parte del fabricante.

1 Seguridad y requerimientos para el uso del producto
10 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
1.2 Requerimientos para el uso del producto
• Ponga esta documentación a disposición del constructor, del personal de montaje y del personal
encargado de la puesta a punto de la máquina o instalación en la que se utiliza este producto.
• Deben observarse en todo momento las indicaciones de esta documentación. Considere asimismo
la documentación del resto de los componentes y módulos.
• Observe las reglamentaciones legales específicas del lugar de destino así como:
– directrices y normas,
– las reglamentaciones de las organizaciones de inspección y empresas aseguradoras,
– disposiciones nacionales.
1.2.1 Requerimientos técnicosIndicaciones generales a tener en cuenta siempre para garantizar un uso del producto seguro y confor-
me a lo previsto:
• Observe las condiciones del entorno y de conexión del producto así como de todos los componen-
tes conectados determinadas en las especificaciones técnicas ( apéndice A).
Este producto sólo puede hacerse funcionar siguiendo las directrices correspondientes de
seguridad si se observan los límites máximos de cargas.
• Observe las advertencias y notas de esta documentación.
1.2.2 Cualificaciones del personal técnico (requerimientos que debe cumplir el personal)El producto solo debe ser puesto en funcionamiento por una persona con formación electrotécnica que
esté familiarizada con:
– la instalación y el funcionamiento de sistemas de mando eléctricos,
– las directivas vigentes para la operación de instalaciones de seguridad,
– las directivas vigentes para la prevención de accidentes y seguridad laboral y
– la documentación del producto.
1.2.3 Aplicaciones y certificacionesLos estándares y valores de prueba que el producto respeta y cumple figuran en la sección “Es-
pecificaciones técnicas” ( apéndice A). La directiva EU correspondiente al producto puede hallarse
en la declaración de conformidad.
Los certificados y la declaración de conformidad de este producto pueden encontrarse enwww.festo.com.
1.2.4 Reparaciones y eliminación
No está permitido realizar reparaciones en el controlador del motor. Si es necesario, cam-
bie el controlador del motor.
Observe las disposiciones locales en materia de eliminación de residuos de módulos
electrónicos.

2 Resumen del producto
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 11
2 Resumen del producto
2.1 El sistema completo CMMP-AS-...-M3
Un sistema completo del controlador del motor CMMP-AS-...-M3 está representado en Fig. 2.1
página 12. Para el funcionamiento del controlador de motor se necesitan los componentes
siguientes:
– Interruptor general de red
– Interruptor de protección FI (RCD) universal de 300 mA
– Módulo automático de fusibles
– Alimentación de tensión 24 VDC
– Controlador del motor CMMP-AS-...-M3
– Motor con cable del motor y del encoder
Para la parametrización se necesita un PC con USB o cable de conexión Ethernet.

2 Resumen del producto
12 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
1
2
3
4
5
6
7
1 Interruptor general2 Fusible3 Unidad de alimentación para tensión de la
lógica
4 Opcional: resistencia de frenado externa5 Controlador del motor CMMP-AS-...-M36 PC7 Motor (p. ej. EMMS-AS con encoder)
Fig. 2.1 Estructura completa del CMMP-AS-...-M3 conMotor y PC
2.2 Dotación del suministro
El suministro comprende:
Dotación del suministro
Controlador del motor CMMP-AS-...-M3
Conjunto para el operario CD
Descripción resumida
Juego de conectores NEKM-C-7
Tab. 2.1 Dotación del suministro
2 Resumen del producto
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 13
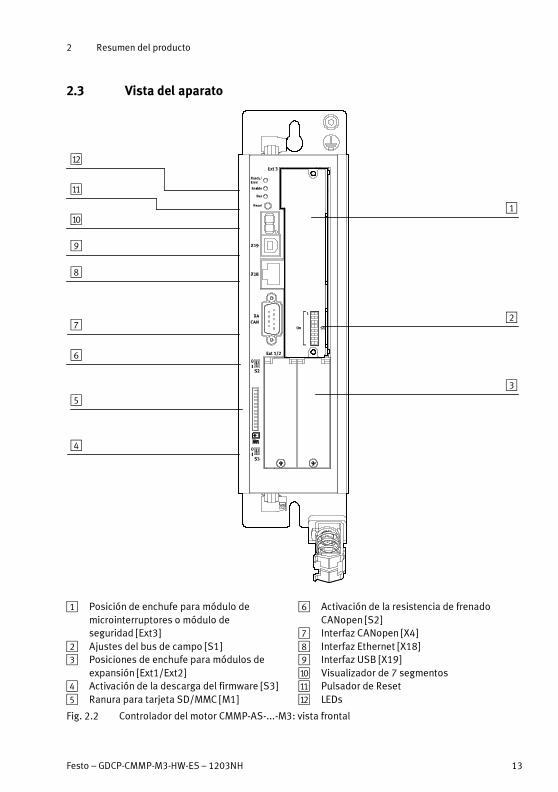
2.3 Vista del aparato
1
2
3
4
5
6
7
8
9
aJ
aA
aB
1 Posición de enchufe para módulo demicrointerruptores o módulo deseguridad [Ext3]
2 Ajustes del bus de campo [S1]3 Posiciones de enchufe para módulos de
expansión [Ext1/Ext2]4 Activación de la descarga del firmware [S3]5 Ranura para tarjeta SD/MMC [M1]
6 Activación de la resistencia de frenadoCANopen [S2]
7 Interfaz CANopen [X4]8 Interfaz Ethernet [X18]9 Interfaz USB [X19]aJ Visualizador de 7 segmentosaA Pulsador de ResetaB LEDs
Fig. 2.2 Controlador del motor CMMP-AS-...-M3: vista frontal

2 Resumen del producto
14 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
4
5
3
2
1
1 Conexión PE2 Fuente de alimentación [X9]3 Salida de transmisor incremental [X11]
4 Entrada de transmisor incremental [X10]5 Comunicación de I/O [X1]
Fig. 2.3 Controlador del motor CMMP-AS-...-3A-M3: vista superior

2 Resumen del producto
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 15
4
3
2
1
5
1 Conexión PE2 Fuente de alimentación [X9]3 Salida de transmisor incremental [X11]
4 Entrada de transmisor incremental [X10]5 Comunicación de I/O [X1]
Fig. 2.4 Controlador del motor CMMP-AS-...-11A-P3-M3: vista superior
2 Resumen del producto
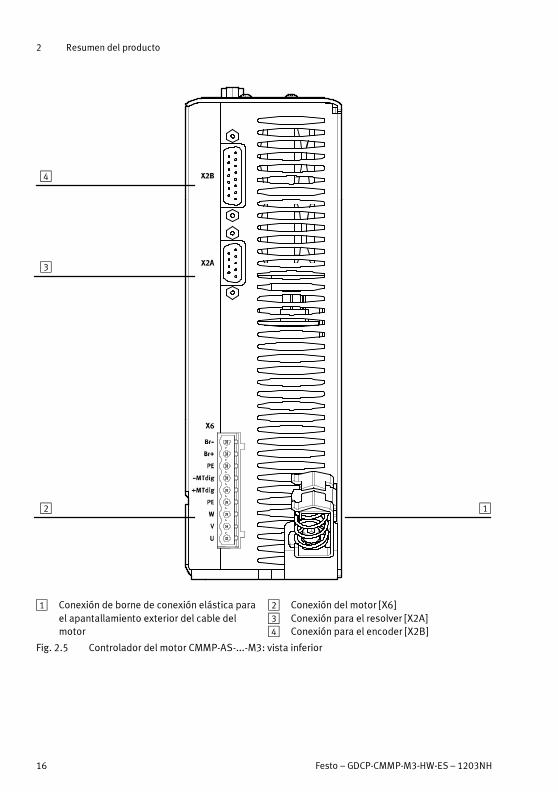
16 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
12
3
4
1 Conexión de borne de conexión elástica parael apantallamiento exterior del cable delmotor
2 Conexión del motor [X6]3 Conexión para el resolver [X2A]4 Conexión para el encoder [X2B]
Fig. 2.5 Controlador del motor CMMP-AS-...-M3: vista inferior

2 Resumen del producto
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 17
2.4 Fusible para la red
En el cable de alimentación debe colocarse un fusible automático1) para proteger el cable:
Controlador del motor Fases Corriente Característica
CMMP-AS-C2-3A-M3 1 16 B16
CMMP-AS-C5-3A-M3 1 16 B16
CMMP-AS-C5-11A-P3-M3 3 16 B16
CMMP-AS-C10-11A-P3-M3 3 16 B16
1) El fusible requerido depende, entre otros factores, de la sección de cable, la temperatura ambiente y el tipo de cableado.
Observe las indicaciones siguientes.
Tab. 2.2 Fusibles de red necesarios
Al colocar los fusibles tenga en cuenta también las normas siguientes:
• EN 60204-1 “Seguridad de máquinas: equipamiento eléctrico de máquinas - parte 1:
requerimientos generales”
• Observe las reglamentaciones legales específicas del lugar de destino así como:
– las directrices y normas,
– las reglamentaciones de las organizaciones de inspección y empresas
aseguradoras,
– disposiciones nacionales.

3 Instalación mecánica
18 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
3 Instalación mecánica
3.1 Notas importantes
NotaEl montaje debe realizarse con cuidado. Hay que asegurarse de que ni durante el mon-
taje ni durante el posterior funcionamiento del accionamiento caen virutas de metal,
polvo metálico o piezas de montaje (tornillos, tuercas, segmentos de conductos) en el
controlador del motor.
NotaLos controladores de motor CMMP-AS-...-M3
• solo se deben usar como aparatos para ser montados en el armario de maniobra.
• Posición de montaje vertical con la fuente de alimentación [X9] hacia arriba.
• Montar en la placa de montaje con ayuda de la oreja de fijación.
• Espacios para el montaje:
Para que el aparato disponga de la ventilación suficiente, debe dejarse encima y
debajo del aparato una distancia de 100 mm en cada lado con respecto a otros
módulos.
• Para un cableado óptimo del cable del motor o del encoder se recomienda dejar en
la parte inferior del aparato un espacio libre para el montaje de 150 mm.
• Los controladores de motor de la familia CMMP-AS-...-M3 están diseñados de tal
forma que, si se utilizan según el uso previsto y se instalan debidamente, se pueden
conectar directamente en una placa de montaje disipadora del calor. Se debe tener
en cuenta que un calentamiento excesivo provocaría un envejecimiento prematuro
y/o daños en el aparato. En caso de someter el controlador del motor CMMP-
AS-...-M3 a unas condiciones térmicas más exigentes se recomienda dejar una dis-
tancia de montaje ( Fig. 3.4).

3 Instalación mecánica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 19
3.2 Montaje
Observar las indicaciones de seguridad Capítulo 1 al realizar trabajos de montaje einstalación.
NotaDaños en la interfaz o en el controlador del motor a causa de una manipulación
incorrecta.• Desconectar las tensiones de alimentación antes de realizar trabajos de montaje e
instalación. Volver a conectar las tensiones de alimentación solo cuando los
trabajos de montaje e instalación se hayan finalizado por completo.
• Nunca se deben desenchufar módulos ni interfaces del controlador del motor ni
enchufarlos mientras haya tensión.
• Observar las normas sobre manipulación de elementos sensibles a las descargas
electrostáticas. No toque la pletina ni los pins de la regleta de bornes del con-
trolador del motor. Toque la interfaz únicamente por la placa frontal o por el borde
de la pletina.
3.2.1 Módulo en la posición de enchufe Ext3Los controladores del motor CMMP-AS-...-M3 se suministran sin el módulo en la posición de enchufe
Ext3; la posición de enchufe está cubierta por una lámina.
Para el funcionamiento del controlador del motor se tiene que montar un módulo aprop-
iado en la posición de enchufe Ext3:
– módulo de microinterruptores CAMC-DS-M1 o
– módulo de seguridad CAMC-G-S...
Montaje del módulo
1. Retirar la lámina de la posición de enchufe Ext3.
2. Introducir el módulo de microinterruptores CAMC-DS-M1 o
el módulo de seguridad CAMC-G-S... en la posición de en-
chufe vacía Ext3 de modo que la pletina se desplace en las
guías laterales de la posición de enchufe.
3. Empujar el módulo y, al alcanzar la regleta de bornes den-
tro del controlador del motor, presionarlo con cuidado
hasta el tope.
4. Por último, fijar el módulo en la parte frontal del cuerpo del
controlador del motor con los dos tornillos. Par de apriete:
aprox. 0,35 Nm.
Fig. 3.1 Montaje y desmontaje

3 Instalación mecánica
20 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Desmontaje del módulo1. Aflojar los tornillos del módulo.
2. Aflojar el módulo unos milímetros levantándolo ligeramente en el panel frontal.
3. Extraer el módulo de la posición de enchufe.
Interruptor DIPLos ocho interruptores en los módulos enchufables (Ext3) son interruptores DIP.
El estado de los interruptores DIP se lee al encenter la tensión de mando o tras un RESET. El con-
trolador del motor realiza las modificaciones de la posición de los interruptores durante el funcionam-
iento solo después de la siguiente conexión o RESET.
El significado del ajuste de los interruptores DIP depende de la interfaz de control
utilizada.
InterruptorDIP
CANopen/DriveBus Profibus DeviceNet EtherCAT
Onboard CAMC-PB enchufado CAMC-DN enchufado CAMC-EC enchufado
1 NN Bit 0 NN Bit 0 NN Bit 0 No se utiliza
2 NN Bit 1 NN Bit 1 NN Bit 1 No se utiliza
3 NN Bit 2 NN Bit 2 NN Bit 2 No se utiliza
4 NN Bit 3 NN Bit 3 NN Bit 3 No se utiliza
5 NN Bit 4 NN Bit 4 NN Bit 4 No se utiliza
6 Velocidad de
transmisión
NN Bit 5 Velocidad de
transmisión
No se utiliza
7 Velocidad de
transmisión
NN Bit 6 Velocidad de
transmisión
No se utiliza
8 Activación del bus de campo
NN = número de nodo
Tab. 3.1 Ajuste de la velocidad de transmisión y los números de nodo
Interruptor DIP 1 Mbit/s1) 500 kBit/s 250 kBit/s 125 kBit/s
6 ON OFF ON OFF
7 ON ON OFF OFF
1) Solo en CANopen/DriveBus; en DeviceNet se limita a 500 kBit/s.
Tab. 3.2 Ajuste de la velocidad de transmisión en CANopen y DeviceNet
Interruptor DIP 8 Bus de campo
1 Siempre activado
0 Siempre desconectado
Tab. 3.3 Activación del bus de campo
Con el interruptor DIP 8 se activa el bus de campo de la interfaz enchufada CAMC-.... Si no
hay ninguna interfaz enchufada se activará el bus CAN [X4].

3 Instalación mecánica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 21
3.2.2 Interfaz en posición de enchufe Ext1 o Ext2 (opcional)Los controladores de motor CMMP-AS-...-M3 se suministran sin interfaces en las posiciones de enchufe
Ext1 y Ext2, las posiciones de enchufe están cerradas con tapas.
Mediante interfaces se puede aumentar el número de I/O digitales y/o de interfaces de bus de campo
del controlador del motor. Tab. 3.4 muestra las ranuras de conexión permitidas para las interfaces.
Ranura deconexión
Interfaz
CAMC-F-PN CAMC-PB CAMC-F-EP CAMC-DN CAMC-EC CAMC-D-8E8A
Ext1 –1) –1) –1) x –1) x
Ext2 x x x –1) x x
1) Adicionalmente CAMC-D-8E8A permitido
Tab. 3.4 Ranuras de conexión permitidas Ext1 y Ext2 para las interfaces
Montaje de la interfaz1. Extraer el tornillo con arandela elástica1 de la tapa de la
ranura de conexión permitida.
2. Levantar la tapa2 lateralmente con un destornillador
pequeño y retirarla.
3. Insertar la interfaz3 en la posición de enchufe vacía de
modo que la pletina se desplace en las guías laterales4
de la posición de enchufe.
4. Empujar la interfaz y, al alcanzar la regleta de bornes den-
tro del controlador del motor, presionarla con cuidado
hasta el tope.
5. Por último, fijar la interfaz en la parte frontal del cuerpo del
controlador del motor con el tornillo con arandela elás-
tica1. Par de apriete: aprox. 0,35 Nm.
Desmontaje de la interfaz
1. Desatornillar el tornillo con arandela elástica de la interfaz.
2. Aflojar la interfaz unos milímetros levantándolo ligeramen-
te en el panel frontal.
3. Extraer la interfaz de la posición de enchufe.
4. Montar otra interfaz o una tapa.
1
2
3
41
Fig. 3.2 Montaje y desmontaje
(ejemplo: CAMC-PB)

3 Instalación mecánica
22 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
3.2.3 Controlador del motorEl controlador de motor CMMP-AS-...-M3 posee tanto en la parte superior como en la inferior unas
orejas de sujeción. Con ellas se fija en posición vertical el controlador de motor en una placa de mon-
taje. Las orejas de sujeción forman parte del disipador de calor, por lo que se dispone del mejor paso
de calor a la placa del armario de maniobra posible.
Para fijar el controlador de motor CMMP-AS-...-M3 utilice tornillos del tamaño M5.
Fig. 3.3 Controlador del motor CMMP-AS-...-M3: placa de montaje
CMMP-AS-... H1 L1 L2 L3 L4 L5 L6 B1 B2 B3 D1 D2
-3A-M3 [mm] 207 281 248 227 202 12,5 10,5 66 61 30,7 10 5,5
-11A-P3-M3 [mm] 247 330 297 276 252 12,5 10,5 79 75 37,5 10 5,5
Tab. 3.5 Controlador del motor CMMP-AS-...-M3: tabla de dimensiones

3 Instalación mecánica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 23
Fig. 3.4 Controlador del motor CMMP-AS-...-M3: distancia de montaje y espacio para el montaje
Controlador del motor L1 H11)
CMMP-AS-...-3A-M3 [mm] 71 100
CMMP-AS-...-11A-P3-M3 [mm] 85 100
1) Para un cableado óptimo del cable del motor o del encoder se recomienda dejar en la parte inferior del aparato un espacio libre
para el montaje de 150 mm.
Tab. 3.6 Controlador del motor CMMP-AS-...-M3: distancia de montaje y espacio para el montaje

4 Instalación eléctrica
24 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
4 Instalación eléctrica
4.1 Asignación de conectores enchufables
La conexión del controlador del motor CMMP-AS-...-M3 a las tensiones de alimentación, al motor, a la
resistencia de frenado externa y al freno de sostenimiento se realiza conforme a los siguientes es-
quemas de circuitos.
0 V
Resistencia de frenadoexterna
alternativa
Alimentación de 24 V
Conexión para elapantallamiento externo del cable del motor
Encoder/resolver
Transductor angular
PE
BR-CH
BR-INT
ZK+
ZK-
L
N
24V+
GND24V
L
N
U
V
W
PE
MT+
MT-
PE
BR+
BR-
E
M3~
T
Q1
X9
X6
X2A/X2B
Monofásica100VAC … 230VAC +/- 10%
interna
PE
+24 V
Encoder
/resolver
Fig. 4.1 Conexión monofásica a la tensión de alimentación y al motor

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 25
L1
0 V
Resistencia de frenadoexterna
alternativa
Alimentación de 24 V
Conexión para elapantallamiento externo del cable del motor
Transductor angular
PE
BR-CH
BR-INT
ZK+
ZK-
L
N
24V+
GND24V
L2
U
V
W
PE
MT+
MT-
PE
BR+
BR-
E
M3~
T
Q1
X9
X6
X2A/X2B
Bifásica100VAC … 230VAC +/- 10%
interna
PE
+24 V
Encoder/
Resolver
Fig. 4.2 Conexión bifásica a la tensión de alimentación y al motor

4 Instalación eléctrica
26 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
+24 V
230 V CA -10%480 V CA +10%
Resistencia de frenadoexterna
interna
alternativa
Conexión para elapantallamiento externo del cable del motor
Transductor angular
BR-EXT
BR-CH
BR-INT
ZK+
ZK-
L1
L2
L3
PE
24V+
GND24V
L1
L2L3
PE
U
V
W
PE
MT+MT-
PE
BR+
BR-
E
M3~
T
0 V
Q1
X9
X6
X2A/X2B
Trifásica
Alimentación de 24 V
Encoder/
Resolver
Fig. 4.3 Conexión trifásica a la tensión de alimentación y al motor

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 27
Los cables de alimentación para el paso de salida de potencia se conectan alternativamente a los sigu-
ientes bornes:
ConexiónAlimentación (observar las notas del capítulo 4.7.4 )
Alimentación AC L, N En controladores del motor monofásicos
L1, L2, L3 En controladores del motor trifásicos
Alimentación DC ZK+, ZK–
Termostato automático del motor
PTC o contacto
normalmente
cerrado/abierto1)
(p. ej. KTY81)
MT+, MT–;
[X6]
Cuando se conduce junto con las fases de motor
de una línea.
Sensor térmico
analógico1)MT+, MT–;
[X2A] o [X2B]
1) No en motores de la serie EMMS-AS
Tab. 4.1 Conexión de los cables de alimentación
La conexión del encoder mediante el conector D-SUB a [X2A] o [X2B] está representada
esquemáticamente a grosso modo en Fig. 4.1, Fig. 4.2 y Fig. 4.3.
NotaEn caso de invertirse la polaridad de las conexiones de la tensión de funcionamiento, de
una tensión de funcionamiento demasiado alta o de haberse intercambiado las
conexiones de la tensión de funcionamiento y del motor, el controlador de motor
CMMP-AS-...-M3 puede sufrir daños.

4 Instalación eléctrica
28 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
4.2 Conexión: comunicación I/O [X1]
4.2.1 Conector [X1]
Controlador del motor Ejecución en el aparato Contraclavija
CMMP-AS-...-M3 Conector D-SUB, 25 contactos,
casquillo
Conector D-SUB, 25 contactos, pines
Tab. 4.2 Ejecución de conector [X1]
4.2.2 Asignación de clavijas [X1]
[X1] Nº pin Denominación Especificación
13 DOUT3 Salida libremente programable
25 DOUT2 Salida libremente programable
12 DOUT1 Salida libremente programable
24 DOUT0 Salida de disponibilidad para funcionar
11 DIN9 Entrada de alta velocidad
23 DIN8 Entrada de inicio de proceso de posicionamiento
10 DIN7 Entrada de detector de final de carrera 1 (cerrado n < 0)
22 DIN6 Entrada de detector de final de carrera 0 (cerrado n > 0)
9 DIN5 Entrada de habilitación de regulador
21 DIN4 Desbloqueo del paso de salida
8 DIN3 Selección de destino de posicionamiento Bit3
20 DIN2 Selección de destino de posicionamiento Bit2
7 DIN1 Selección de destino de posicionamiento Bit1
19 DIN0 Selección de destino de posicionamiento Bit0
6 GND24 Potencial de referencia para I/O digitales
18 +24 V Salida 24 V
5 AMON1 Salida analógica de supervisión 1
17 AMON0 Salida analógica de supervisión 0
4 +VREF Salida de referencia para potenciómetro de valor
nominal
16 AIN2 Entradas de valor nominal 1 y 2, de un solo extremo,
tensión de entrada máx. 30 V
3 AIN1 Entradas de valor nominal 1 y 2, de un solo extremo,
tensión de entrada máx. 30 V
15 #AIN0 Entrada de valor nominal 0, diferencial, tensión de
entrada máxima 30 V
2 AIN0 Entrada de valor nominal 0, diferencial, tensión de
entrada máxima 30 V
14 AGND Potencial de referencia para señales analógicas
1 AGND Apantallamiento para señales analógicas, AGND
Tab. 4.3 Asignación de clavijas: comunicación I/O [X1]

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 29
Control CMMP-AS-…-M3
Nº pin
X1
AIN0
#AIN0
AIN1
AIN2
+VREF
AGND
AMON0
AMON1
AGND
100 mA
máx.
+24VDC
DIN0
DIN9
DOUT0
DOUT3
GND24
100 mA
máx.
PE PE
GND24
+24VDC
AGND
AIN0
#AIN0
AIN1/AIN2
AGND
AGND
+VREF
AGND
+15VDC
AMON0/1
AGND
DINX
AGNDGND
GND24
GND
GND
GND24
+24VDC
DOUTX
Cuerpo del conector
2
15
3
16
4
14
17
5
14
1
18
19
11
24
13
6
Fig. 4.4 Esquema eléctrico de base de conexión [X1]
Cable de control y conector D-Subwww.festo.com/catalogue.
4 Instalación eléctrica
30 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
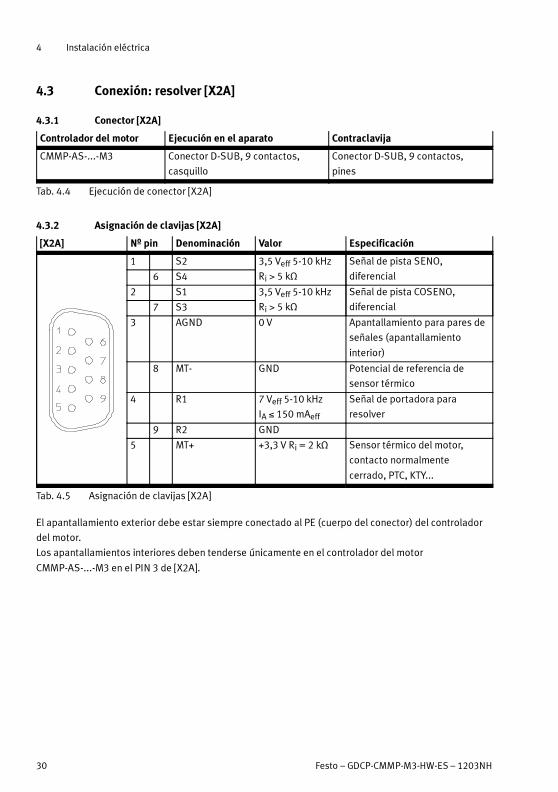
4.3 Conexión: resolver [X2A]
4.3.1 Conector [X2A]
Controlador del motor Ejecución en el aparato Contraclavija
CMMP-AS-...-M3 Conector D-SUB, 9 contactos,
casquillo
Conector D-SUB, 9 contactos,
pines
Tab. 4.4 Ejecución de conector [X2A]
4.3.2 Asignación de clavijas [X2A]
[X2A] Nº pin Denominación Valor Especificación
1 S2 3,5 Veff 5-10 kHz
Ri > 5 kΩ
Señal de pista SENO,
diferencial6 S4
2 S1 3,5 Veff 5-10 kHz
Ri > 5 kΩ
Señal de pista COSENO,
diferencial7 S3
3 AGND 0 V Apantallamiento para pares de
señales (apantallamiento
interior)
8 MT- GND Potencial de referencia de
sensor térmico
4 R1 7 Veff 5-10 kHz
IA ≤ 150 mAeff
Señal de portadora para
resolver
9 R2 GND
5 MT+ +3,3 V Ri= 2 kΩ Sensor térmico del motor,
contacto normalmente
cerrado, PTC, KTY...
Tab. 4.5 Asignación de clavijas [X2A]
El apantallamiento exterior debe estar siempre conectado al PE (cuerpo del conector) del controlador
del motor.
Los apantallamientos interiores deben tenderse únicamente en el controlador del motor
CMMP-AS-...-M3 en el PIN 3 de [X2A].

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 31
4.4 Conexión: encoder [X2B]
4.4.1 Conector [X2B]
Controlador del motor Ejecución en el aparato Contraclavija
CMMP-AS-...-M3 Conector D-SUB, 15 contactos,
casquillo
Conector D-SUB, 15 contactos,
pines
Tab. 4.6 Ejecución de conector [X2B]
4.4.2 Asignación de clavijas [X2B]
[X2B] Nº pin Denominación Valor Especificación
1 MT+ +3,3 V Ri= 2 kΩ Sensor térmico del motor, con-
tacto normalmente cerrado,PTC, KTY ...
9 U_SENS+ 5 V … 12 V
RI L 1 kΩ
Cables del sensor para la
alimentación del transmisor2 U_SENS-
10 US 5 V/12 V ±10%
Imax = 300 mA
Tensión de funcionamiento
para transmisores incremen-tales de alta resolución
3 GND 0 V Potencial de referencia de
alimentación del transmisor ydel sensor de temperatura del
motor
11 R 0,2 VSS… 0,8 VSSRI L 120 Ω
Señal de pista de impulso de
puesta a cero (diferencial) deltransmisor incremental de alta
resolución4 R#
12 COS_Z1 1) 1 VSSRI L 120 Ω
Señal de conmutación
COSENO (diferencial) deltransmisor incremental de alta
resolución5 COS_Z1# 1)
13 SIN_Z1 1) 1 VSSRI L 120 Ω
Señal de conmutación SENO
(diferencial) del transmisor in-cremental de alta resolución
6 SIN_Z1# 1)
14 COS_Z0 1) 1 VSS ±10%
RI L 120 Ω
Señal de pista COSENO
(diferencial) del transmisor in-cremental de alta resolución
7 COS_Z0# 1)
15 SIN_Z0 1) 1 VSS ±10%
RI L 120 Ω
Señal de pista SENO (diferen-
cial) del transmisor incremen-tal de alta resolución
8 SIN_Z0# 1)
1) Transmisor Heidenhain: A=SIN_Z0; B=COS_Z0, C=SIN_Z1; D=COS_Z1
Tab. 4.7 Asignación de clavijas: transmisor incremental analógico – opcional
El apantallamiento exterior debe estar siempre conectado al PE (cuerpo del conector) del controlador
del motor.
4 Instalación eléctrica
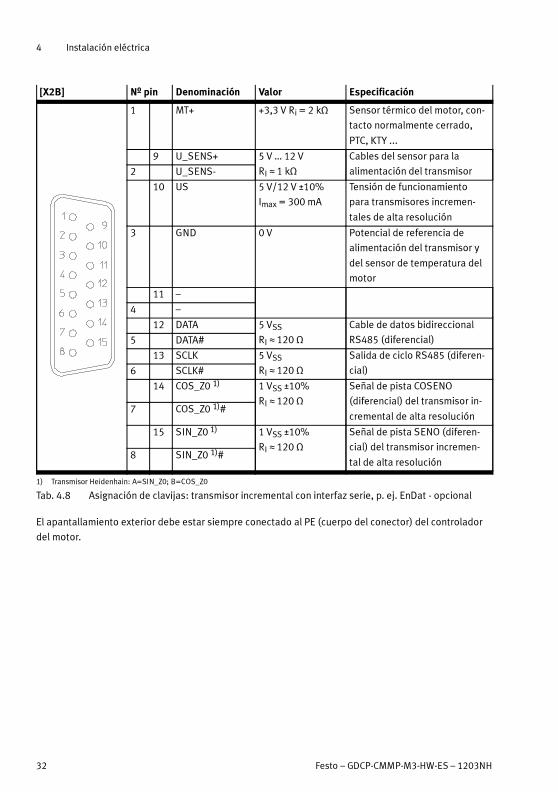
32 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
[X2B] Nº pin Denominación Valor Especificación
1 MT+ +3,3 V Ri= 2 kΩ Sensor térmico del motor, con-
tacto normalmente cerrado,
PTC, KTY ...
9 U_SENS+ 5 V … 12 V
RI L 1 kΩ
Cables del sensor para la
alimentación del transmisor2 U_SENS-
10 US 5 V/12 V ±10%
Imax = 300 mA
Tensión de funcionamiento
para transmisores incremen-
tales de alta resolución
3 GND 0 V Potencial de referencia de
alimentación del transmisor y
del sensor de temperatura del
motor
11 –
4 –
12 DATA 5 VSSRI L 120 Ω
Cable de datos bidireccional
RS485 (diferencial)5 DATA#
13 SCLK 5 VSSRI L 120 Ω
Salida de ciclo RS485 (diferen-
cial)6 SCLK#
14 COS_Z0 1) 1 VSS ±10%
RI L 120 Ω
Señal de pista COSENO
(diferencial) del transmisor in-
cremental de alta resolución7 COS_Z0 1)#
15 SIN_Z0 1) 1 VSS ±10%
RI L 120 Ω
Señal de pista SENO (diferen-
cial) del transmisor incremen-
tal de alta resolución8 SIN_Z0 1)#
1) Transmisor Heidenhain: A=SIN_Z0; B=COS_Z0
Tab. 4.8 Asignación de clavijas: transmisor incremental con interfaz serie, p. ej. EnDat - opcional
El apantallamiento exterior debe estar siempre conectado al PE (cuerpo del conector) del controlador
del motor.

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 33
[X2B] Nº pin Denominación Valor Especificación
1 MT+ +3,3 V Ri= 2 kΩ Sensor térmico del motor, con-
tacto normalmente cerrado,
PTC, KTY ...
9 U_SENS+ 5 V … 12 V
RI L 1 kΩ
Cables del sensor para la
alimentación del transmisor2 U_SENS-
10 US 5 V/12 V / ±10%
Imax = 300 mA
Tensión de funcionamiento
para transmisores incremen-
tales de alta resolución
3 GND 0 V Potencial de referencia de
alimentación del transmisor y
del sensor de temperatura del
motor
11 N 2 VSS… 5 VSSRI L 120 Ω
Impulso de puesta a cero
RS422 (diferencial) del
transmisor incremental digital4 N#
12 H_U 0V/5V
RI L 2 kΩ
en VCC
Fase U sensor Hall para con-
mutación
5 H_V Fase V sensor Hall para con-
mutación
13 H_W Fase W sensor Hall para con-
mutación
6 –
14 A 2 VSS… 5 VSSRI L 120 Ω
Señal de pista A RS422
(diferencial) del transmisor in-
cremental digital7 A#
15 B 2 VSS… 5 VSSRI L 120 Ω
Señal de pista B RS422
(diferencial) del transmisor in-
cremental digital8 B#
Tab. 4.9 Asignación de clavijas: transmisor incremental digital – opcional
El apantallamiento exterior debe estar siempre conectado al PE (cuerpo del conector) del controlador
del motor.
4 Instalación eléctrica
34 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
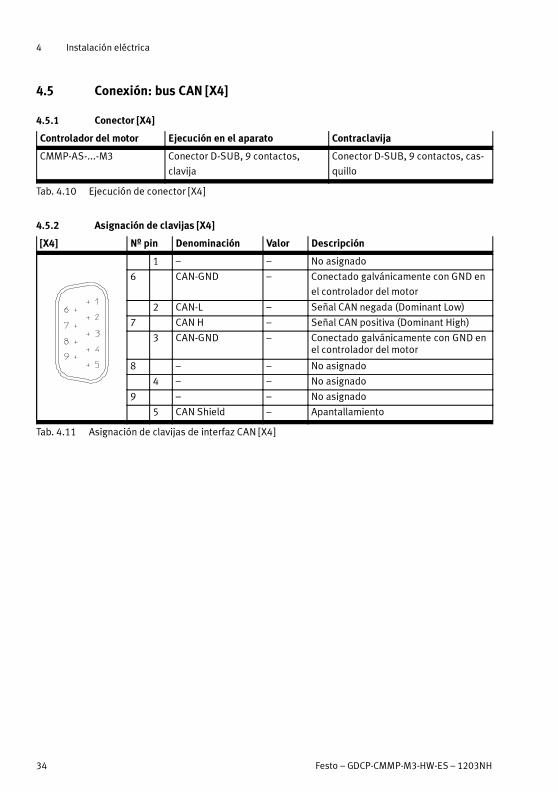
4.5 Conexión: bus CAN [X4]
4.5.1 Conector [X4]
Controlador del motor Ejecución en el aparato Contraclavija
CMMP-AS-...-M3 Conector D-SUB, 9 contactos,
clavija
Conector D-SUB, 9 contactos, cas-
quillo
Tab. 4.10 Ejecución de conector [X4]
4.5.2 Asignación de clavijas [X4]
[X4] Nº pin Denominación Valor Descripción
1 – – No asignado
6 CAN-GND – Conectado galvánicamente con GND en
el controlador del motor
2 CAN-L – Señal CAN negada (Dominant Low)
7 CAN H – Señal CAN positiva (Dominant High)
3 CAN-GND – Conectado galvánicamente con GND enel controlador del motor
8 – – No asignado
4 – – No asignado
9 – – No asignado
5 CAN Shield – Apantallamiento
Tab. 4.11 Asignación de clavijas de interfaz CAN [X4]

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 35
4.6 Conexión: motor [X6]
4.6.1 Conector [X6]
Controlador del motor Ejecución en el aparato Contraclavija Codificación
CMMP-AS-C2-3A-M3 PHOENIX Contact
MSTBA 2.5/9-G-5.08 BK
PHOENIX Contact
MSTB 2.5/9-ST-5.08 BK
PIN1 (BR-)
CMMP-AS-C5-3A-M3
CMMP-AS-C5-11A-P3-M3 PHOENIX Power-Combicon
PC 4/9-G-7,62 BK
PHOENIX Power-Combicon
PC 4 HV/9-G-7,62 BK
–
CMMP-AS-C10-11A-P3-M3
Tab. 4.12 Ejecución de conector [X6]
4.6.2 Asignación de clavijas [X6]
[X6]1) Nº pin Denominación Valor Especificación
1
9
1 BR- 0 V freno Freno de sostenimiento (motor), nivel
de señal en función del estado de
conmutación, interruptor High-Side /
Low-Side2 BR+ 24 V freno
3 PE PE Apantallamiento del cable para el
freno de sostenimiento y el sensor de
temperatura (en cables de Festo: nc)
4 -MTdig GND Sensor de temperatura del motor,
contacto normalmente cerrado, con-
tacto normalmente abierto, PTC, KTY.5 +MTdig +3,3 V 5 mA
6 PE PE Conductor de protección a tierra del
motor
7 W Especificaciones
técnicas
Tabla Tab. A.9
Conexión de las tres fases del motor
8 V
9 U
1) Ejemplo de conector del controlador del motor CMMP-AS-...-3A-M3
Tab. 4.13 Asignación de clavijas [X6] Conexión: motor
El apantallamiento del cable del motor debe tenderse además en el cuerpo del con-
trolador del motor (borne de conexión elástica: Fig. 2.5 página 16).
En los bornes BR+ y BR- se puede conectar un freno de sostenimiento del motor. El freno inmovilizador
es alimentado por la alimentación de la lógica del controlador del motor. Hay que observar la corriente
de salida máxima facilitada por el controlador del motor CMMP-AS-...-M3.
Para soltar el freno de sostenimiento debe asegurarse que se respetan las tolerancias de
tensión en los bornes de conexión del freno de sostenimiento.
Observar al respecto las indicaciones de la Tab. A.4 página 56.

4 Instalación eléctrica
36 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
En caso necesario, hay que conmutar un relé entre el aparato y el freno inmovilizador, tal como se rep-
resenta en la Fig. 4.5 página 36:
CMMP-AS-...-M3
BR+
BR-
Resistencia y
condensador para
supresión del arco (voltaico)
+24 V unidad de alimentación
GND unidad de alimentación
+24 V freno
GND, freno
Motor
Diodo de libre circulación
Fig. 4.5 Conexión de un freno inmovilizador con elevado consumo de corriente del aparato
Al conmutar corrientes continuas inductivas a través del relé se generan fuertes corrien-
tes con formación de chispas. Para eliminar las perturbaciones recomendamos la unidad
para eliminación de perturbaciones RC integrada, p. ej. de la empresa Evox RIFA, referen-
cia: PMR205AC6470M022 (unidad RC con 22 Ω en serie con 0,47 μF).

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 37
4.7 Conexión: fuente de alimentación [X9]
El controlador del motor CMMP-AS-...-M3 también recibe su alimentación de corriente de 24 VDC para
la electrónica de control a través del conector enchufable [X9].
La alimentación de red es monofásica en los controladores de motor CMMP-AS-…-3A-M3 y trifásica en
los controladores de motor CMMP-AS-…-11A-P3-M3.
4.7.1 Conector
Controlador del motor Ejecución en el aparato Contraclavija Codificación
CMMP-AS-C2-3A-M3 PHOENIX ContactMSTBA 2,5/9-G-5,08-BK
PHOENIX ContactMSTB 2,5/9-ST-5,08-BK
PIN9 (GND24V)
CMMP-AS-C5-3A-M3
CMMP-AS-C5-11A-P3-M3 PHOENIXPower-COMBICONPC 4 HV/11-G-7,62-BK
PHOENIXPower-COMBICONPC 4 HV/11-ST-7,62-BK
–
CMMP-AS-C10-11A-P3-M3
Tab. 4.14 Ejecución de conector [X9]
4.7.2 Asignación de clavijas [X9] – monofásica
[X9] Nº pin Denominación Valor Especificación
1
9
1 L 100 … 230 VAC±10%50 … 60 Hz
Fase de red
2 N Conductor neutro de red (potencialde referencia)
3 ZK+ < 440 VDC Alimentación alternativa:tensión positiva de circuito inter-medio
4 ZK- GND_ZK Alimentación alternativa:tensión negativa de circuito inter-medio
5 BR-INT < 460 VDC Conexión de la resistencia defrenado interna (puente a BR-CH sise usa la resistencia interna).
6 BR-CH < 460 VDC Conexión de chopper de frenadopara– resistencia de frenado interna
frente a BR-INT o bien– resistencia de frenado externa
frente a ZK+
7 PE PE Conexión de conductor protector dela red
8 +24 V +24 VDC Alimentación para el órgano demando, freno de sostenimiento eI/Os
9 GND24 V GND24 VDC Potencial de referencia de alimen-tación de 0 V
Tab. 4.15 Asignación de clavijas [X9] – monofásica

4 Instalación eléctrica
38 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
4.7.3 Asignación de clavijas [X9] – trifásica
[X9] Nº pin Denominación Valor Especificación
1
11
1 L1 230 … 480 VAC
±10%
50 … 60 Hz
Fase 1 de red
2 L2 Fase 2 de red
3 L3 Fase 3 de red
4 ZK+ < 700 VDC Alimentación alternativa: tensión
positiva de circuito intermedio
5 ZK- GND_ZK Alimentación alternativa: tensión
negativa de circuito intermedio
6 BR-EXT < 800 VDC Conexión de la resistencia de
frenado externa
7 BR-CH < 800 VDC Conexión de chopper de frenado
para
– resistencia de frenado interna
frente a BR-INT o bien
– - resistencia de frenado externa
frente a BR-EXT
8 BR-INT < 800 VDC Conexión de la resistencia de
frenado interna (puente a BR-CH si
se usa la resistencia interna)
9 PE PE Conexión de conductor protector de
la red
10 +24 V +24 VDC Alimentación para el órgano de
mando, freno de sostenimiento e
I/Os
11 GND24 V GND24 VDC Potencial de referencia de alimen-
tación
Tab. 4.16 Asignación de clavijas [X9] – trifásica
4.7.4 Alimentación AC
Comportamiento al conectar:– En cuanto el controlador del motor CMMP-AS-...-M3 es alimentado con la tensión de la red, se
produce una carga del circuito intermedio (< 1 s) a través de las resistencias de frenado cuando
está desactivado el relé del circuito intermedio.
– Tras realizarse con éxito la carga previa del circuito intermedio, el relé es excitado y el circuito inter-
medio sin resistencias se acopla la red de alimentación.
Alimentación de CA con PFC activoLa etapa PFC solo está disponible en controladores de motor monofásicos (CMMP-AS-...-3A-M3).
4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 39
NotaEl funcionamiento con inductancia de red no está permitido, dado que podría causar
oscilaciones en el circuito de regulación.
NotaEl funcionamiento con transformador de aislamiento no está permitido, dado que en
este caso no hay potencial de referencia (N).
NotaAl conectar la tensión de la carga es necesario asegurarse de que el potencial de
referencia (N) se conecta antes de la fase (L1). Esto se puede lograr mediante:
– potencial de referencia no conectado (N)
– el uso de contactores con N anticipado, cuando es obligatoria la conexión del poten-
cial de referencia.
Alimentación DC - circuito intermedioComo alternativa a la alimentación de AC o con el fin del acoplamiento del circuito intermedio, es posib-
le una alimentación directa de DC para el circuito intermedio.
A través de los bornes ZK+ y ZK- del conector [X9] se pueden conectar los circuitos intermedios de var-
ios controladores de motor CMMP-AS-...-M3. El acoplamiento de los circuitos intermedios es interesan-
te en aplicaciones en las que hay implicadas unas elevadas energías de frenado o en las que en caso de
fallo de la fuente de alimentación aún deban ejecutarse movimientos.
NotaEn controladores de motor monofásicos (CMMP-AS-...-3A-M3) es necesario desactivar
la etapa del PFC cuando los controladores del motor se acoplan mediante el circuito
intermedio.
4.7.5 Resistencia de frenado
Si no se emplea ninguna resistencia de frenado externa, hay que conectar un puente con
la resistencia de frenado interna, para que la descarga rápida del circuito intermedio esté
operativa. Tab. 4.15 y Tab. 4.16.
Para obtener mayores potencias de frenado, hay que conectar una resistencia de frenado
externa [X9].

4 Instalación eléctrica
40 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
4.8 Conexión: entrada de encoder incremental [X10]
4.8.1 Conector [X10]
Controlador del motor Ejecución en el aparato Contraclavija
CMMP-AS-...-M3 Conector D-SUB, 9 contactos, cas-
quillo
Conector D-SUB, 9 contactos,
pines
Tab. 4.17 Ejecución de conector [X10]
4.8.2 Asignación de clavijas [X10]
[X10] Nº pin Denominación Valor Especificación
1 A/CLK/CW 5 V RI L 120 Ω Señal de transmisor incremental ASeñal de motor paso a paaso CLKPulsos en sentido horario CWPolaridad pos. según RS422
6 A#/CLK#/CW# 5 V RI L 120 Ω Señal de transmisor incremental ASeñal de motor paso a paso CLKPulsos en sentido horario CWPolaridad neg. según RS422
2 B/DIR/CCW 5 V RI L 120 Ω Señal de transmisor incremental BSeñal de motor paso a paso DIRPulsos en sentido antihorario CCWPolaridad pos. según RS422
7 B#/DIR#/CCW# 5 V RI L 120 Ω Señal de transmisor incremental BSeñal de motor paso a paso DIRPulsos en sentido antihorario CCWPolaridad neg. según RS422
3 N 5 V RI L 120 Ω Impulso de puesta a cero detransmisor incremental NPolaridad pos. según RS422
8 N# 5 V RI L 120 Ω Impulso de puesta a cero detransmisor incremental NPolaridad neg. según RS422
4 GND – Referencia GND para el transmisor
9 GND – Apantallamiento para el cable deconexión
5 VCC +5 V ±5% 100 mA Alimentación auxiliar, cargar con100 mA como máximo, pero aprueba de cortocircuitos
Tab. 4.18 Asignación de clavijas X10: entrada de encoder incremental
Para unir dos controladores de motor en el funcionamiento master-slave a través de [X11]
y [X10] no se deben conectar los pines 5 (+5 V - alimentación auxiliar) entre sí.

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 41
4.8.3 Tipo y ejecución del cable [X10]Recomendamos el uso de cables de conexión del transmisor en los cuales la señal del transmisor in-
cremental vaya trenzada por pares y los distintos pares estén apantallados.
4.8.4 Indicaciones de conexión [X10]A través de la entrada [X10] se pueden procesar tanto señales de transmisores incrementales, como
señales de direccionamiento de impulsos, tales como las que generan las tarjetas de control de los
motores paso a paso.
El amplificador de entrada en la entrada de señales se ha dimensionado para el procesamiento de
señales diferenciales según el estándar de interfaz RS422.
4.9 Conexión: salida de encoder incremental [X11]
4.9.1 Conector [X11]
Controlador del motor Ejecución en el aparato Contraclavija
CMMP-AS-...-M3 Conector D-SUB, 9 contactos, cas-
quillo
Conector D-SUB, 9 contactos,
pines
Tab. 4.19 Ejecución de conector [X11]
4.9.2 Asignación de clavijas [X11]
[X11] Nº pin Denominación Valor Especificación
1 A 5 V RA L66 Ω1) Señal de transmisor incremental A
6 A# 5 V RA L66 Ω1) Señal de transmisor incremental A#
2 B 5 V RA L66 Ω1) Señal de transmisor incremental B
7 B# 5 V RA L66 Ω1) Señal de transmisor incremental B#
3 N 5 V RA L66 Ω1) Impulso de puesta a cero de
transmisor incremental N
8 N# 5 V RA L66 Ω1) Impulso de puesta a cero de
transmisor incremental N#
4 GND - Referencia GND para el transmisor
9 GND - Apantallamiento para el cable de
conexión
5 VCC +5 V ±5% 100 mA Alimentación auxiliar, cargar con
100 mA como máximo, pero a
prueba de cortocircuitos
1) La indicación para RA designa la resistencia de salida diferencial
Tab. 4.20 Asignación de clavijas [X11]: salida de encoder incremental
El excitador de la salida de señal transmite señales diferenciales (5 V) según el estándar de interfaz
RS422.
Un aparato puede activar hasta 32 reguladores más.
Para unir dos controladores de motor en el funcionamiento master-slave a través de [X11]
y [X10] no se deben conectar los pines 5 (+5 V - alimentación auxiliar) entre sí.

4 Instalación eléctrica
42 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
4.10 Instrucciones para una instalación segura y conforme a la EMC
4.10.1 Explicaciones y conceptos
La compatibilidad electromagnética (en inglés electromagnetic compatibility, EMC, o electromagnetic
interference, EMI) abarca los requerimientos siguientes:
Resistencia a interferenciasUna resistencia a interferencias suficiente de una instalación o equipo eléctricos contra las influencias
perturbadoras eléctricas, magnéticas o electromagnéticas que procedan del exterior y que actúen
sobre los cables o sobre un espacio.
Emisión de interferenciasUna resistencia a interferencias pequeña suficiente de perturbaciones eléctricas, magnéticas o elec-
tromagnéticas de una instalación o equipo eléctricos que actúan sobre otros equipos del entorno por
los cables o el espacio.
AdvertenciaPor razones de seguridad, es imprescindible conectar todos los conductores de protec-
ción a tierra PE antes de la puesta en funcionamiento.
La conexión PE de la red se conecta a los puntos de conexión PE (parte posterior del
aparato) y [X9] del CMMP-AS-...-M3.
Observe que las conexiones a tierra entre los aparatos y la placa de montaje tengan la
mayor superficie posible para que desvíen correctamente las interferencias de alta
frecuencia (HF).
4.10.2 Generalidades acerca de la EMC
La radiación perturbadora y la resistencia a interferencias de un controlador de motor siempre depende
del diseño global del accionamiento, el cual está compuesto por los componentes siguientes:
– fuente de alimentación
– controlador del motor
– motor
– electromecánica
– ejecución y tipo de cableado
– control superpuesto
Para incrementar la resistencia a las interferencias y reducir la emisión de interferencias, el controlador
de motor CMMP-AS-...-M3 ya lleva incorporado un filtro de red y válvulas de motor, de forma que en la
mayoría de aplicaciones, el controlador de motor CMMP-AS-...-M3 puede funcionar sin ningún apantal-
lamiento o filtro adicional.
Los controladores de motor CMMP-AS-...-M3 han sido certificados de acuerdo con la
norma EN 61800-3 vigente en materia de accionamientos eléctricos. Para ello se han
utilizado componentes de Festo (p. ej. cables de motor, de encoder y de resolver). Estos
cables no se deben prolongar.
En la mayoría de los casos no es necesaria ninguna medida de filtrado externa ( Tabla
4.10.3)
La declaración de conformidad está disponible en www.festo.com.

4 Instalación eléctrica
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 43
4.10.3 Áreas EMC: primer y segundo entornoLos controladores de motor CMMP-AS-...-M3 satisfacen, siempre y cuando se monten correctamente y
se tiendan todos los cables de conexión debidamente, las prescripciones de la norma pertinente
EN 61800-3. Dicha norma ya no versa sobre las „clases de valor límite“, sino sobre los llamados
entornos.
NotaEl primer entorno (C2) comprende las redes de alimentación conectadas a los edificios
residenciales, mientras que el segundo entorno (C3) comprende las redes de alimen-
tación a las que están conectadas únicamente industrias.
Para los controladores de motor CMMP-AS-...-M3 se aplica lo siguiente:
Tipo EMC Área Mantenimiento de los requerimientos EMC
Emisión de inter-
ferencias
Segundo entorno
(zonas industriales)
Longitud del cable motor de hasta 25 m sin filtros
externos.
Si se usan cables de motor más largos (de 25 … a 50 m)
hay que prever un filtro de red adecuado.
Resistencia a inter-
ferencias
Segundo entorno
(zonas industriales)
Independientemente de la longitud del cable de motor.
Tab. 4.21 Requerimientos EMC
4.10.4 Cableado adecuado según EMCPara montar un sistema de accionamiento cumpliendo con los requisitos de la EMC, se debe tener en
cuenta lo siguiente (compárese también con capítulo 4, página 24):
1. Para que las corrientes de desviación y las pérdidas en el cable del motor sean lo más bajas posible,
el controlador del motor CMMP-AS-...-M3 debe emplazarse lo más cerca posible del motor
( capítulo 4.10.5 página 44).
2. Los cables del motor y del encoder deben estar apantallados.
3. El apantallamiento del cable del motor se coloca en el cuerpo del controlador del motor CMMP-
AS-...-M3 (bornes de conexión del apantallamiento, borne de conexión elástica). Fundamentalmen-
te el apantallamiento del cable también se coloca siempre en el controlador de motor pertinente
con el fin de refluir las corrientes de desviación también en los controladores de motor causantes.
4. La conexión PE de la red se conecta al punto de conexión PE de la toma de alimentación [X9]. así
como a la conexión PE del cuerpo.
5. El conductor interno PE del cable del motor se conecta al punto de conexión PE de la conexión del
motor [X6].
6. Los cables de señal se deben separar de los cables de potencia lo máximo posible. No deben con-
ducirse en paralelo. Si no se puede evitar un cruce de cables, este se efectuará lo más vertical
posible (es decir, en ángulo de 90°).
7. Para cables de señal y de mando sin apantallamiento no se puede garantizar un funcionamiento
seguro/fiable. Si resultase imprescindible, como mínimo deberían trenzarse.
8. Incluso los cables apantallados presentan obligatoriamente en sus dos extremos pequeñas piezas
no apantalladas (si no se utilizan cajas de enchufe apantalladas).

4 Instalación eléctrica
44 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Condiciones válidas en términos generales:
– Conectar los apantallamientos internos en los pines del conector enchufable previstos para ello;
longitud máxima 40 mm.
– Longitud máxima de hilos sin apantallamiento en cables de confección propia: 35 mm.
– Conectar el apantallamiento completo del regulador al borne PE en plano; longitud máxima de
40 mm.
– Conectar el apantallamiento global en el lado del motor, en plano sobre el cuerpo del conector o
motor; longitud máxima de 40 mm (garantizada con NEBM-...).
PeligroPor razones de seguridad, es imprescindible conectar todos los conductores de protec-
ción a tierra PE antes de la puesta en funcionamiento.
Es obligatorio observar las directivas de las normas EN 50178 y EN 60204-1 sobre pues-
ta a tierra de protección en la instalación.
4.10.5 Funcionamiento con cables de motor largosEn aquellos casos que presenten cables de motor largos y/o en caso de elegir erróneamente los cables
de motor de una capacidad insuficiente, se puede producir una sobrecarga térmica de los filtros. Para
evitar este tipo de problemas recomendamos, en aquellos casos en los cuales es necesario utilizar
cables de motor largos, proceder urgentemente del siguiente modo:
– A partir de una longitud de cable de más de 25 m, sólo deberán colocarse cables con una capacitan-
cia por unidad de longitud entre la fase del motor y el apantallamiento inferior a 200 pF/m, mejor si
es inferior a 150 pF/m, y filtros de red adicionales.
NotaCon longitudes de cable mayores resultan diferentes amplificaciones del regulador de
corriente (resistencia del tendido).
4.10.6 Protección EDS
PrecauciónEn las conectores enchufables D-SUB sin asignar hay riesgo de que se produzcan daños
en el aparato o en otras partes de la instalación, como resultado de ESD (descarga
electrostática).
En el diseño del controlador del motor CMMP-AS-...-M3 se ha dado especial importancia a una elevada
resistencia a interferencias. Por esta razón se han ejecutado los distintos bloques funcionales con
aislamiento galvánico. La transmisión de señales dentro del aparato se realiza a través de
optoacopladores.
Se distinguen las siguientes áreas separadas:
– Etapa de potencia con circuito intermedio y entrada de alimentación de red
– Electrónica de control con procesamiento de las señales analógicas
– Alimentación de 24 V y entradas y salidas digitales

5 Puesta a punto
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 45
5 Puesta a punto
5.1 Instrucciones generales de conexión
El tendido de los cables de conexión resulta decisivo por lo que respecta a la EMC, por
ello es imprescindible tener en cuenta el capítulo anterior 4.10.4 página 43.
Advertencia¡PELIGRO!
La no observancia de las indicaciones de seguridad del capítulo 1 (página 8) puede
causar daños materiales, lesiones corporales, descargas eléctricas o, en caso extremo,
causar la muerte.
5.2 Interfaces FCT
5.2.1 Resumen de interfaces
1
2
1 [X19]: USB 2 [X18]: Ethernet
Fig. 5.1 Interfaces FCT
5.2.2 USB [X19]Los aparatos de la serie CMMP-AS-...-M3 disponen de una interfaz USB para la parametrización. La
interfaz USB se utiliza como interfaz de configuración para la configuración del FCT.
Son compatibles las siguientes funciones:
– Simulación de la interfaz RS232 mediante USB
– Parametrización completa del CMMP-AS-...-M3 a través de FCT
– Descarga de firmware con FCT.
5 Puesta a punto
46 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Ejecución de la interfazEl conector enchufable es un casquillo de unidad terminal del tipo B. Pueden utilizarse todos los cables
de unidades terminales habituales hasta una longitud de 5 m. Si se requieren cables más largos, es
necesario utilizar repetidores USB adecuados.
La interfaz USB es una interfaz únicamente slave (el CMMP-AS…-M3 es el slave, el PC es el host). Cum-
ple la especificación de USB Rev. USB 1.1.
Controlador USB para el PCLa conexión FCT se realiza a través del controlador estándar de modo Kernel “WinUsb.sys” y la con-
figuración del aparato y el acceso a los puntos finales a través de WinUSB API.
El paquete de controlador USB es parte integrante de la instalación de FCT.
Son compatibles los siguientes sistemas operativos:
– Windows XP a partir de Service Pack 2
– Windows Vista
– Windows 7
WinUsb.sys se instala como controlador de funciones del aparato.
5.2.3 Ethernet TCP/IP [X18]
Los aparatos de la serie CMMP-AS-…-M3A disponen de una interfaz Ethernet para la parametrización.
Son compatibles las siguientes funciones:
– Comunicación punto a punto entre PC y controlador de motor para la parametrización
– Parametrización completa del CMMP-AS-...-M3 a través de FCT
– Comunicación de un PC o un PLC para varios CMMP-AS-...-M3 que se encuentran en la misma red
local para supervisión, adaptación de la parametrización o control de procesos del regulador.
Ejecución de la interfazLa interfaz en el aparato es un conector tipo casquillo 8P8C (RJ45).
La conexión dispone de dos indicadores LED con la siguiente función:
– Amarillo Physical Link Detect (hay conexión de red)
– Verde Data Connection (conexión de datos / intercambio de datos)
La ejecución de la interfaz cumple la especificación IEEE 802.3u. Deben utilizarse cables del tipo FTP5 o
superior con 100Base-TX. La interfaz es compatible con la función Autosensing para la detección
automática del cable conectado. Pueden utilizarse tanto cables Patch habituales (1:1) como cables
Crosslink (cruzados).
Servicios compatiblesLos siguientes servicios son compatibles con la interfaz Ethernet:
– TCP/IP
– UDP/IP
– DNS (ARP y BOOTP)
– DHCP
– AutoIP
– TFTP
5 Puesta a punto
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 47
Asignación de direccionesLos ajustes de red (dirección IP, máscara de subred, Gateway) se pueden obtener automáticamente o
introducir manualmente:
– automáticamente a través de DHCP (la dirección IP obtenida automáticamente está en el margen de
IP predeterminado por el servidor DHCP)
– automáticamente a través de Auto IP (si no se ha encontrado ningún servidor DHCP, se selecciona
una dirección entre 169.254.1.0 y 169.254.254.255 de forma pseudoaleatoria)
– Asignación de IP manual (ajuste manual de los parámetros de red a través de FCT)
Para establecer la conexión se aplica el siguiente orden:
1. DHCP
2. AutoIP
3. Dirección IP estática
Si no es posible obtener una dirección IP a través del servicio de nivel superior, se utiliza el servicio
siguiente. Si no es posible obtener una dirección a través de DHCP, se utiliza primero una dirección
AutoIP y después una dirección estática.
5.3 Herramienta/material
– Destornillador en cruz tamaño 1
– Cable USB o cable de red para parametrización
– Cable del encoder
– Cable del motor
– Cable de alimentación de corriente
– Cable de mando
5.4 Conexión del motor
1. Conectar el cable del motor en el lado del motor.
2. Insertar el conector PHOENIX en el casquillo [X6] del aparato.
3. Embornar la conexión de apantallamiento de cable en el borne de blindaje (no adecuado como aliv-
io de tracción).
4. Conectar el cable del encoder en el lado del motor.
5. Insertar el conector D-SUB en el casquillo [X2A] del resolver o [X2B] del encoder del aparato y ap-
retar los tornillos de bloqueo.
6. Comprobar de nuevo todos los racores rápidos.

5 Puesta a punto
48 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
5.5 Conexión del controlador de motor CMMP-AS-...-M3 a la alimentaciónde corriente
AdvertenciaPeligro de descarga eléctrica.
– En caso de módulos no montados o placas ciegas en las posiciones de enchufe
Ext1 … Ext3.
– En caso de cables no montados en los conectores [X6] y [X9].
– Al desconectar cables de conexión bajo tensión.
El contacto con piezas bajo tensión causa lesiones graves y puede provocar la muerte.
El producto solo debe hacerse funcionar montado y cuando se han tomado todas las
medidas de seguridad.
Antes de tocar piezas bajo tensión durante trabajos de mantenimiento, reparación y
limpieza así como durante interrupciones prologadas de funcionamiento:
1. Dejar sin tensión el equipo eléctrico mediante el interruptor principal y asegurarlo
contra reconexiones.
2. Tras la desconexión es necesario esperar 5 minutos de tiempo de descarga y com-
probar que no haya tensión antes de acceder al controlador.
1. Cerciorarse de que la alimentación de corriente esté desconectada.
2. Conectar el cable PE de la red al casquillo de toma a tierra PE.
3. Insertar el conector PHOENIX en el casquillo [X9] del controlador del motor.
4. Conectar las conexiones 24 V a la unidad de alimentación apropiada.
5. Establecer las conexiones de alimentación de la red.
6. Comprobar de nuevo todos los racores rápidos.
5.6 Conexión del PC
1. Conectar el PC a través de USB 5.2.2 USB [X19] o Ethernet 5.2.3 Ethernet TCP/IP [X18] con el
controlador del motor.
5.7 Comprobación de disponibilidad para funcionar
1. Asegúrese de que la habilitación del regulador esté desconectada (habilitación del regulador:
DIN 5 en [X1]).
2. Conecte la alimentación de tensión de todos los aparatos.
Durante el proceso de arranque el punto del visualizador de siete segmentos está encendido.
Al finalizar el proceso de arranque se enciende en verde el LED READY.
Si el LED READY se enciende en rojo significa que hay un fallo. Si el visualizador digital de
siete segmentos muestra una secuencia de números con una “E” antepuesta, se trata de
un mensaje de error cuya causa debe subsanar. En este caso, siga leyendo el
capítulo A página 55.
Si en el aparato no se enciende ningún indicador, proceda de la siguiente manera:

5 Puesta a punto
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 49
No se enciende ningún indicador
1. Desconecte la alimentación de corriente.
2. Espere 5 minutos para que pueda descargarse el circuito intermedio.
3. Compruebe todos los cables de conexión.
4. Compruebe la disponibilidad para funcionar de la alimentación de corriente de 24 V.
5. Conecte de nuevo la alimentación de corriente.
6. Si todavía no se enciende ningún indicador aparato averiado.
6 Funciones de servicio y mensajes de diagnosis
50 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
6 Funciones de servicio y mensajes de diagnosis
6.1 Funciones de protección y de servicio
6.1.1 Cuadro general
El controlador de motor CMMP-AS-...-M3 posee un amplio sistema de sensores encargados de con-
trolar el perfecto funcionamiento del núcleo del controlador, el paso de salida de potencia, el motor y la
comunicación con el entorno exterior. Todos los eventos de diagnosis que se produzcan se guardan en
la memoria interna de diagnosis. La mayoría de errores provocan la desconexión del núcleo del con-
trolador del motor y del paso de salida de potencia. Entonces solo se puede volver a conectar el con-
trolador del motor cuando se ha eliminado el error y se ha validado.
Un amplio sistema de sensores y funciones de supervisión garantizan la seguridad funcional:
– Medición de la temperatura del motor
– Medición de la temperatura de la unidad de potencia
– Detección de conexiones a tierra (PE)
– Detección de cortocircuitos entre dos fases del motor
– Detección de sobretensiones en el circuito intermedio
– Detección de fallos en la alimentación interna
– Colapso de la tensión de alimentación
6.1.2 Detección de fallo de fase y de redLos controladores de motor CMMP-AS-...-11A-P3-M3 detectan en el funcionamiento trifásico un fallo de
fase (detección de fallo de fase) o el fallo de varias fases (detección de fallo de red) de la alimentación
de la red del aparato.
6.1.3 Control de sobrecorriente y cortocircuitosEl control de sobrecorriente y cortocircuitos detecta cortocircuitos entre dos fases del motor, así como
cortocircuitos en los bornes de salida del motor contra el potencial de referencia positivo y negativo del
circuito intermedio y contra PE. Cuando el control de errores detecta sobrecorriente, se produce una
desconexión inmediata del paso de salida de potencia, con lo que se garantiza el anticortocircuitaje.
6.1.4 Control de sobretensión del circuito intermedioEl control de sobretensión del circuito intermedio se activa en cuanto la tensión del circuito intermedio
supera el rango de tensión de funcionamiento. Con ello, el paso de salida de potencia se desconecta.

6 Funciones de servicio y mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 51
6.1.5 Control de la temperatura para el disipador de calorLa temperatura del disipador de calor del paso de salida de potencia se mide con un sensor lineal de
temperatura. El límite de temperatura varía de un aparato a otro Tab. A.3 en página 56. Ap-
roximadamente 5 °C por debajo del valor límite se activa una advertencia de temperatura.
6.1.6 Control del motorPara controlar el motor y el transmisor giratorio de impulsos conectado, el controlador del motor
CMMP-AS-...-M3 dispone de las siguientes funciones de protección:
Función deprotección
Descripción
Control del en-
coder
Si se produce un error en el encoder, se provoca una desconexión del paso de
salida de potencia. En el resolver se controla, p. ej., la señal de pista. En en-
coders incrementales se comprueban las señales de conmutación. En general,
para transmisores inteligentes se evalúan sus distintos mensajes de error y se
emiten en el CMMP-AS-...-M3 como error común E 08-8.
Medición y con-
trol de la tem-
peratura del
motor
El controlador de motor CMMP-AS-...-M3 posee una entrada digital y una
analógica para la detección y el control de la temperatura del motor. Pueden
elegirse como sensores térmicos.
– [X6]: entrada digital para PTC, contactos normalmente cerrados y
abiertos.
– [X2A] y [X2B]: contactos normalmente cerrados y sensores analógicos de la
serie KTY. Otros sensores (NTC, PTC) requieren en caso
necesario la correspondiente adaptación por software.
Tab. 6.1 Funciones de seguridad del motor
6.1.7 Control de I2tEl controlador de motor CMMP-AS-...-M3 dispone de un control I²t para limitar la potencia disipada
media en el paso de salida de potencia y en el motor. Como la potencia disipada que se da en la elec-
trónica de potencia y en el motor, en el mejor de los casos, aumenta al cuadrado con la corriente que
fluye, se toma como medida de potencia disipada el valor de corriente al cuadrado.
6.1.8 Control de potencia para el interruptor chopper de frenadoEl firmware controla las resistencias de frenado mediante la función I2t chopper de frenado. Cuando el
control de potencia “I²t-resistencia de frenado” alcanza el 100 %, la potencia de la resistencia de
frenado interna de repone a la potencia nominal.
Como consecuencia de esta reposición se genera el error “E 07-0” “Sobretensión en el circuito inter-
medio” cuando el proceso de frenado aún no ha finalizado y se devuelve (demasiada) energía al con-
trolador.
El chopper de frenado se protege adicionalmente mediante una detección de sobrecorriente. Cuando
se detecta un cortocircuito a través de la resistencia de frenado, se desconecta la activación del chop-
per de frenado.

6 Funciones de servicio y mensajes de diagnosis
52 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
6.1.9 Estado de puesta a puntoA los controladores de motor que se envíen a Festo para el servicio técnico, se les proveerá de otro
firmware y otros parámetros con el fin de poder comprobarlos.
Antes de volver a poner a punto el controlador del motor CMMP-AS-...-M3 en el emplazamiento del
cliente es necesario volver a parametrizarlo. El software de parametrización consulta el estado de
puesta a punto y solicita al usuario que parametrice el controlador del motor. Al mismo tiempo el
aparato señala por medio de un indicador óptico ‚A‘ en el visualizador digital de siete segmentos que
se encuentra en estado operacional pero todavía no está parametrizado.
6.1.10 Descarga rápida del circuito intermedio
El circuito intermedio experimenta una descarga rápida en caso de detección de un fallo de la alimen-
tación de la red en el transcurso del tiempo de seguridad según EN 60204-1.
Una conmutación con retardo de tiempo del interruptor chopper de frenado según las clases de poten-
cia con funcionamiento paralelo y fallo de la alimentación de la red garantiza que a través de las resis-
tencias de frenado de las clases de potencia superiores se reciba la energía principal durante la descar-
ga rápida del circuito intermedio.
La descarga rápida puede no ser efectiva en ciertas combinaciones de equipos, sobre
todo en la conexión en paralelo de varios controladores de motor en el circuito intermedio
o con una resistencia de frenado no conectada. Después de la desconexión los con-
troladores de motor pueden estar bajo tensión peligrosa hasta 5 minutos (carga residual
del condensador).
6.2 Mensajes de modo de funcionamiento y de diagnosis
6.2.1 Elementos de mando e indicaciónEl controlador de motor CMMP-AS-...-M3 posee en la cara frontal tres LED y un visualizador digital de
siete segmentos para indicar los estados operativos.
Componente Color deLED
Función
Visualizador de siete
segmentos
– Indicación del modo operacional y, en caso de error, un
código de error codificado
6.2.2 Visualizador de siete segmentos
LED1 Verde En disposición de funcionamiento
Rojo Error
LED2 Verde Habilitación del regulador
LED3 Amarillo Indicación del estado bus CAN
Pulsador de RESET – Reinicio de hardware para el procesador
Tab. 6.2 Elementos indicadores y pulsador de RESET

6 Funciones de servicio y mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 53
6.2.2 Visualizador de siete segmentosEn la siguiente tabla se explica el significado de los símbolos mostrados:
Indicación Significado
En el modo de funcionamiento de regulación de la velocidad se indican los segmen-
tos externos “en rotación”. La indicación depende de la posición real o de la
velocidad actuales.
Estando la liberación del regulador activa, la barra central también está activa.
El controlador de motor CMMP-AS-...-M3 todavía se tiene que parametrizar.
(Visualizador de siete segmentos = “A”)
Funcionamiento regulado por el momento de giro.
(Visualizador de siete segmentos = “I”)
“H”: el controlador del motor se encuentra en un “estado seguro”.
Esto no es lo mismo que la información sobre el estado de la función de seguridad
STO (Safe Torque Off ). Esto solo se puede leer en el LED del estado del módulo de
seguridad.
Para el “estado no seguro” no se ha previsto ningún indicador especial, se represen-
tan los indicadores del estado normales del controlador del motor.
“F.”:
Indica que se está cargando un firmware en la memoria flash.
“.”:
Bootloader activo
“d”:
Indica que en el controlador se está cargando un conjunto de parámetros de la tar-
jeta SD.
P xxx Posicionamiento (“xxx” corresponde al número de posición)
Las cifras se muestran una tras otra.
PH x Recorrido de referencia. “x” corresponde a la fase correspondiente del recorrido de
referencia:
x = 0: fase de búsqueda
x = 1: fase de marcha lenta
x = 2: desplazamiento a posición cero
Las cifras se muestran una tras otra.
E xxy Mensaje de error con índice principal “xx” y subíndice “y”
-xxy- Mensaje de advertencia con índice principal “xx” y subíndice “y”. Una advertencia
se muestra como mínimo dos veces en el visualizador de siete segmentos.
Tab. 6.3 Indicación de modo de funcionamiento y de error

6 Funciones de servicio y mensajes de diagnosis
54 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
6.2.3 Validación de mensajes de errorLos mensajes de error se pueden validar mediante:
– la interfaz de parametrización
– el bus de campo (palabra de control)
– un flanco descendiente en DIN5 [X1].
Habilitación
del regulador
DIN5 [X1]
1
“Error activo”
1 L 80 ms
Fig. 6.1 Diagrama de temporización: validar errores
Los eventos de diagnosis parametrizados como advertencia son validados
automáticamente cuando la causa ya no existe.
6.2.4 Mensajes de diagnosis
La siguiente tabla indica el significado y las medidas a tomar ante los distintos mensajes de diagnosis:
Capítulo A Apéndice técnico

A Apéndice técnico
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 55
A Apéndice técnico
A.1 Especificaciones técnicas CMMP-AS-...-M3
Especificaciones técnicas generalesCMMP-AS- C2-3A-M3 C5-3A-M3 C5-11A-P3-M3 C10-11A-P3-M3
Tipo de fijación Fijación mediante atornillamiento a placa base
Indicador Visualizador digital de siete segmentos
Interfaz de paramet-
rización
USB 1.1
Ethernet TCP/IP
Homologaciones
Símbolo CE (consultar dec-
laración de conformidad)
Según directiva UE de baja tensión
Según directiva UE EMC
Según directiva de máquinas UE
Dimensiones y peso
Dimensiones
(alto x ancho x
fondo)1)
[mm] 202x66x207 227x66x207 252x79x247
Dimensiones de
la placa de mon-
taje
[mm] 248x61 297x75
Peso [kg] 2,1 2,2 3,5
1) Sin conector, tornillo de apantallamiento ni cabezas de tornillo
Tab. A.1 Especificaciones técnicas: generales
Transporte y almacenamiento
CMMP-AS- C2-3A-M3 C5-3A-M3 C5-11A-P3-M3 C10-11A-P3-M3
Margen de tem-
peratura
[°C] -25 … +70
Tab. A.2 Especificaciones técnicas: transporte y almacenamiento

A Apéndice técnico
56 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Condiciones de funcionamiento y del entornoCMMP-AS- C2-3A-M3 C5-3A-M3 C5-11A-P3-M3 C10-11A-P3-M3
Altura de montaje permitida (sobre el nivel del mar)
Con potencia
nominal
[m] 1.000
Con reducción
de potencia
[m] 1.000 … 2.000
Humedad del aire [%] 0 … 90 (sin condensación)
Tipo de protec-
ción
IP20
Grado de ensuc-
iamiento
2
Temperatura de
funcionamiento
[°C] 0 … +40
Temperatura de
funcionamiento
con reducción de
potencia 2,5%
por K
[°C] +40 … +50
Temperatura de
desconexión
disipador de calor
unidad de poten-
cia
°C 100 80 80 80
Tab. A.3 Especificaciones técnicas: condiciones de funcionamiento y del entorno
Datos eléctricos de la alimentación de la lógicaCMMP-AS- C2-3A-M3 C5-3A-M3 C5-11A-P3-M3 C10-11A-P3-M3
Tensión nominal [V DC] 24 ±20%
Corriente
nominal1)[A] 0,55 0,65 1
Corriente máxima
para freno de
sostenimiento
[A] 1 2
En caso de consumo de corriente más elevado Fig. 4.5 página 36
1) Añadir consumo de corriente de un posible freno de retención y de I/O.
Tab. A.4 Especificaciones técnicas: alimentación de la lógica
NotaLos frenos del motor no se pueden abrir al 100% con el motor caliente y con una tensión
de alimentación insuficiente (fuera del margen de tolerancia), lo que puede provocar un
desgaste prematuro del freno.
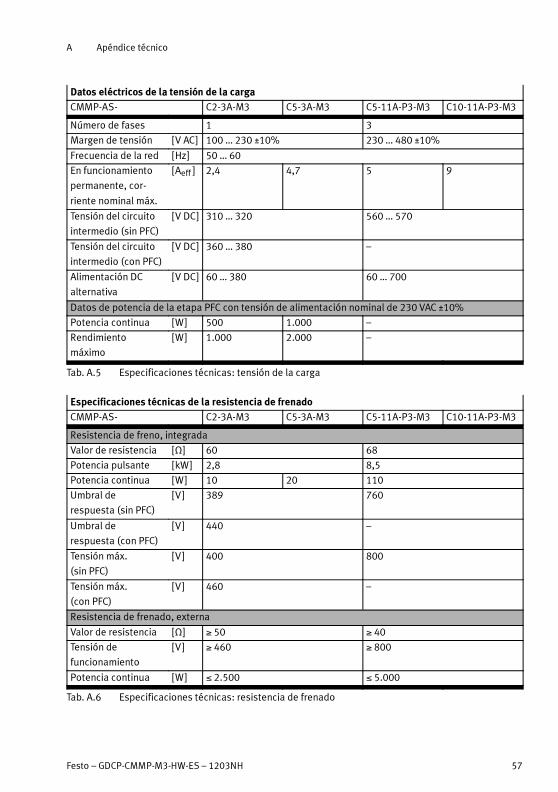
A Apéndice técnico
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 57
Datos eléctricos de la tensión de la cargaCMMP-AS- C2-3A-M3 C5-3A-M3 C5-11A-P3-M3 C10-11A-P3-M3
Número de fases 1 3
Margen de tensión [V AC] 100 … 230 ±10% 230 … 480 ±10%
Frecuencia de la red [Hz] 50 … 60
En funcionamiento
permanente, cor-
riente nominal máx.
[Aeff ] 2,4 4,7 5 9
Tensión del circuito
intermedio (sin PFC)
[V DC] 310 … 320 560 … 570
Tensión del circuito
intermedio (con PFC)
[V DC] 360 … 380 –
Alimentación DC
alternativa
[V DC] 60 … 380 60 … 700
Datos de potencia de la etapa PFC con tensión de alimentación nominal de 230 VAC ±10%
Potencia continua [W] 500 1.000 –
Rendimiento
máximo
[W] 1.000 2.000 –
Tab. A.5 Especificaciones técnicas: tensión de la carga
Especificaciones técnicas de la resistencia de frenadoCMMP-AS- C2-3A-M3 C5-3A-M3 C5-11A-P3-M3 C10-11A-P3-M3
Resistencia de freno, integrada
Valor de resistencia [Ω] 60 68
Potencia pulsante [kW] 2,8 8,5
Potencia continua [W] 10 20 110
Umbral de
respuesta (sin PFC)
[V] 389 760
Umbral de
respuesta (con PFC)
[V] 440 –
Tensión máx.
(sin PFC)
[V] 400 800
Tensión máx.
(con PFC)
[V] 460 –
Resistencia de frenado, externa
Valor de resistencia [Ω] ≥ 50 ≥ 40
Tensión de
funcionamiento
[V] ≥ 460 ≥ 800
Potencia continua [W] ≤ 2.500 ≤ 5.000
Tab. A.6 Especificaciones técnicas: resistencia de frenado

A Apéndice técnico
58 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Cable del motorCMMP-AS- C2-3A-M3 C5-3A-M3 C5-11A-P3-M3 C10-11A-P3-M3
Longitud máx. del
cable del motor para
segundo entorno
[m] ≤ 25 (sin filtro)
Capacidad del cable
de una fase contra
apantallamiento
[pF/m] ≤ 200
Tab. A.7 Especificaciones técnicas: cable del motor
Control de la temperatura del motor
Sensor digital Contacto normalmente
cerrado:
RKalt < 500 Ω RHeiß > 100 kΩ
Sensor analógico Sensor de temperatura de silicio, p. ej. KTY81, 82 o similar.
R25 L 2.000 Ω
R100 L 3.400 Ω
Tab. A.8 Especificaciones técnicas: supervisión de la temperatura del motor
Datos de salida
CMMP-AS- C2-3A-M31) C5-3A-M31) C5-11A-P3-M32) C10-11A-P3-M32)
Tensión [VAC] 0 … 270 0 … 360
Potencia nominal [kVA] 0,5 1 3 6
Potencia máx. duran-
te 5 segundos
[kVA] 1 2 6 12
1) Datos para el funcionamiento en 1x230 VAC [± 10%], 50 … 60 Hz
2) Datos para el funcionamiento en 3x400 VAC [± 10%], 50 … 60 Hz
Tab. A.9 Especificaciones técnicas: datos de salida
CMMP-AS-C2-3A-M3Tiempo de ciclo del regulador de
corriente1)[μs] 62,5 125
Frecuencia de paso de salida reducida a la
mitad1)Activa No activa Activa No activa
Frecuencia de paso de salida [kHz] 8 16 4 8
Corriente de salida nominal [Aeff ] 2,5 2,2 2,5 2,5
Corriente de salida máxima para tiempo máximo
Corriente máxima de salida [Aeff ] 5 4,4 5 5
Tiempo máx. [s] 5 5 5 5
Corriente máxima de salida [Aeff ] 7,5 6,6 7,5 7,5
Tiempo máx. [s] 1,3 1,3 1,3 1,3
Corriente máxima de salida [Aeff ] 10 8,8 10 10
Tiempo máx. [s] 0,5 0,5 0,5 0,5
1) Opción con FCT parametrizable
Tab. A.10 Datos de salida CMMP-AS-C2-3A-M3

A Apéndice técnico
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 59
CMMP-AS-C5-3A-M3Tiempo de ciclo del regulador de
corriente1)[μs] 62,5 125
Frecuencia de paso de salida reducida a la
mitad1)Activa No activa Activa No activa
Frecuencia de paso de salida [kHz] 8 16 4 8
Corriente de salida nominal [Aeff ] 5 4,4 5 5
Corriente de salida máxima para tiempo máximo
Corriente máxima de salida [Aeff ] 10 8,8 10 10
Tiempo máx. [s] 5 5 5 5
Corriente máxima de salida [Aeff ] 15 13,2 15 15
Tiempo máx. [s] 1,3 1,3 1,3 1,3
Corriente máxima de salida [Aeff ] 20 17,6 20 20
Tiempo máx. [s] 0,5 0,5 0,5 0,5
1) Opción con FCT parametrizable
Tab. A.11 Datos de salida CMMP-AS-C5-3A-M3
CMMP-AS-C5-11A-P3-M3
Tiempo de ciclo del regulador de
corriente1)[μs] 62,5 125
Frecuencia de paso de salida reducida a la
mitad1)Activa No activa Activa No activa
Frecuencia de paso de salida [kHz] 8 16 4 8
Corriente de salida nominal [Aeff ] 5 2,5 5 5
Corriente de salida máxima para tiempo máximo
Corriente máxima de salida [Aeff ] 10 5 10 10
Tiempo máx. [s] 5 5 5 5
Corriente máxima de salida [Aeff ] 15 7,5 15 15
Tiempo máx. [s] 0,8 1,2 0,8 0,8
Corriente máxima de salida [Aeff ] 20 10 20 20
Tiempo máx. [s] 0,1 0,15 0,1 0,1
1) Opción con FCT parametrizable
Tab. A.12 Datos de salida CMMP-AS-C5-11A-P3-M3 con frecuencia eléctrica de giro ≤ 5 Hz

A Apéndice técnico
60 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
CMMP-AS-C5-11A-P3-M3Tiempo de ciclo del regulador de
corriente1)[μs] 62,5 125
Frecuencia de paso de salida reducida a la
mitad1)Activa No activa Activa No activa
Frecuencia de paso de salida [kHz] 8 16 4 8
Corriente de salida nominal [Aeff ] 5 2,5 5 5
Corriente de salida máxima para tiempo máximo
Corriente máxima de salida [Aeff ] 10 5 10 10
Tiempo máx. [s] 5 5 5 5
Corriente máxima de salida [Aeff ] 15 7,5 15 15
Tiempo máx. [s] 2 2 2 2
Corriente máxima de salida [Aeff ] 20 10 20 20
Tiempo máx. [s] 0,5 0,5 0,5 0,5
1) Opción con FCT parametrizable
Tab. A.13 Datos de salida CMMP-AS-C5-11A-P3-M3 con frecuencia eléctrica de giro ≥ 20 Hz
CMMP-AS-C10-11A-P3-M3
Tiempo de ciclo del regulador de
corriente1)[μs] 62,5 125
Frecuencia de paso de salida reducida a la
mitad1)Activa No activa Activa No activa
Frecuencia de paso de salida [kHz] 8 16 4 8
Corriente de salida nominal [Aeff ] 8 3,45 10 8
Corriente de salida máxima para tiempo máximo
Corriente máxima de salida [Aeff ] 16 6,9 20 16
Tiempo máx. [s] 5 5 5 5
Corriente máxima de salida [Aeff ] 24 10,35 30 24
Tiempo máx. [s] 0,1 0,2 0,1 0,1
Corriente máxima de salida [Aeff ] 32 13,8 40 32
Tiempo máx. [s] 0,07 0,15 0,07 0,07
1) Opción con FCT parametrizable
Tab. A.14 Datos de salida CMMP-AS-C10-11A-P3-M3 con frecuencia eléctrica de giro ≤ 5 Hz
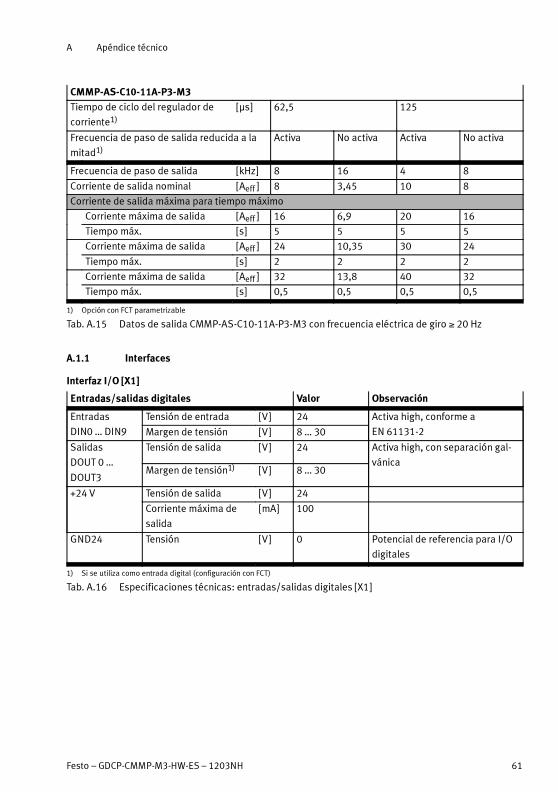
A Apéndice técnico
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 61
CMMP-AS-C10-11A-P3-M3Tiempo de ciclo del regulador de
corriente1)[μs] 62,5 125
Frecuencia de paso de salida reducida a la
mitad1)Activa No activa Activa No activa
Frecuencia de paso de salida [kHz] 8 16 4 8
Corriente de salida nominal [Aeff ] 8 3,45 10 8
Corriente de salida máxima para tiempo máximo
Corriente máxima de salida [Aeff ] 16 6,9 20 16
Tiempo máx. [s] 5 5 5 5
Corriente máxima de salida [Aeff ] 24 10,35 30 24
Tiempo máx. [s] 2 2 2 2
Corriente máxima de salida [Aeff ] 32 13,8 40 32
Tiempo máx. [s] 0,5 0,5 0,5 0,5
1) Opción con FCT parametrizable
Tab. A.15 Datos de salida CMMP-AS-C10-11A-P3-M3 con frecuencia eléctrica de giro ≥ 20 Hz
A.1.1 Interfaces
Interfaz I/O [X1]
Entradas/salidas digitales Valor Observación
Entradas
DIN0 … DIN9
Tensión de entrada [V] 24 Activa high, conforme a
EN 61131-2Margen de tensión [V] 8 … 30
Salidas
DOUT 0 …
DOUT3
Tensión de salida [V] 24 Activa high, con separación gal-
vánicaMargen de tensión1) [V] 8 … 30
+24 V Tensión de salida [V] 24
Corriente máxima de
salida
[mA] 100
GND24 Tensión [V] 0 Potencial de referencia para I/O
digitales
1) Si se utiliza como entrada digital (configuración con FCT)
Tab. A.16 Especificaciones técnicas: entradas/salidas digitales [X1]
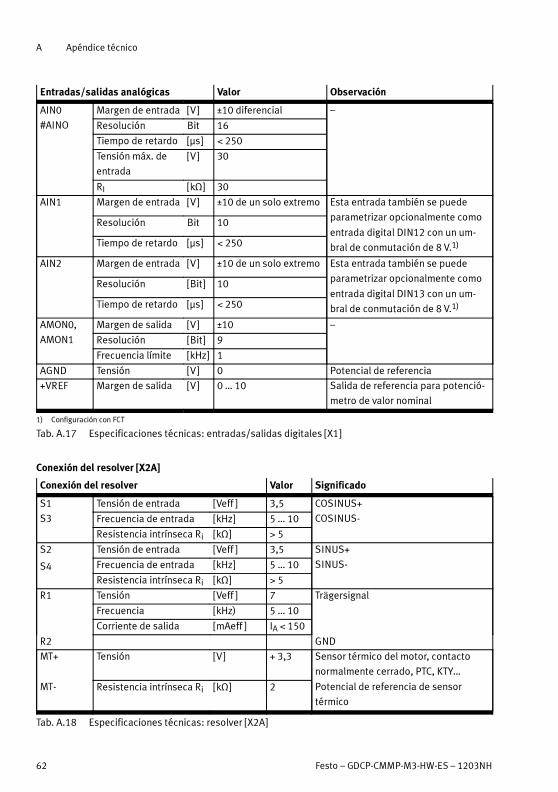
A Apéndice técnico
62 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Entradas/salidas analógicas Valor Observación
AIN0
#AINO
Margen de entrada [V] ±10 diferencial –
Resolución Bit 16
Tiempo de retardo [μs] < 250
Tensión máx. de
entrada
[V] 30
RI [kΩ] 30
AIN1 Margen de entrada [V] ±10 de un solo extremo Esta entrada también se puede
parametrizar opcionalmente como
entrada digital DIN12 con un um-
bral de conmutación de 8 V.1)
Resolución Bit 10
Tiempo de retardo [μs] < 250
AIN2 Margen de entrada [V] ±10 de un solo extremo Esta entrada también se puede
parametrizar opcionalmente como
entrada digital DIN13 con un um-
bral de conmutación de 8 V.1)
Resolución [Bit] 10
Tiempo de retardo [μs] < 250
AMON0,
AMON1
Margen de salida [V] ±10 –
Resolución [Bit] 9
Frecuencia límite [kHz] 1
AGND Tensión [V] 0 Potencial de referencia
+VREF Margen de salida [V] 0 … 10 Salida de referencia para potenció-
metro de valor nominal
1) Configuración con FCT
Tab. A.17 Especificaciones técnicas: entradas/salidas digitales [X1]
Conexión del resolver [X2A]
Conexión del resolver Valor Significado
S1
S3
Tensión de entrada [Veff ] 3,5 COSINUS+
COSINUS-Frecuencia de entrada [kHz] 5 … 10
Resistencia intrínseca Ri [kΩ] > 5
S2
S4
Tensión de entrada [Veff ] 3,5 SINUS+
SINUS-Frecuencia de entrada [kHz] 5 … 10
Resistencia intrínseca Ri [kΩ] > 5
R1 Tensión [Veff ] 7 Trägersignal
Frecuencia [kHz) 5 … 10
Corriente de salida [mAeff ] IA < 150
R2 GND
MT+
MT-
Tensión [V] + 3,3 Sensor térmico del motor, contacto
normalmente cerrado, PTC, KTY…
Potencial de referencia de sensor
térmico
Resistencia intrínseca Ri [kΩ] 2
Tab. A.18 Especificaciones técnicas: resolver [X2A]

A Apéndice técnico
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 63
Parámetro Valor
Relación de transmisión 0,5
Frecuencia de la portadora [kHz] 5 … 10
Tensión de excitación [Veff ] 7, a prueba de cortocircuitos
Impedancia de excitación (a 10 kHz) [Ω] ≥ (20 + j20)
Impedancia del estator [Ω] ≤ (500 + j1000)
Tab. A.19 Especificaciones técnicas: resolver [X2A]
Parámetro Valor
Resolución [Bit] 16
Tiempo de retardo del registro de señales [μs] < 200
Resolución del número de revoluciones [min-1] Aprox. 4
Precisión absoluta del registro angular ['] < 5
Velocidad de giro máx. [min-1] 16.000
Tab. A.20 Especificaciones técnicas: resolver [X2A]
Conexión del encoder [X2B]
Parámetro Valor Observación
Número de líneas del
transmisor
[líneas/vuelta] 1 … 262144 Se puede parametrizar
Resolución
angular/interpolación
[bit/periodo] 10
Señales de pista
A, B [Vss] 1 Diferencial; 2,5 V desplazamiento
N [Vss] 0,2 … 1 Diferencial; 2,5 V desplazamiento
Pista de conmutación A1, B1
(opcional)
[Vss] 1 Diferencial; 2,5 V desplazamiento
Impedancia de entrada de
señales de pista
[Ω] 120 Entrada diferencial
Frecuencia límite flímPista de máxima resolución [kHz] >300
Pista de conmutación [kHz] Aprox. 10
Interfaz de comunicación adicional EnDat (Heidenhain) e HIPERFACE (Stegmann)
Alimentación de salida Con limitación de corriente, regulación mediante
cable de sensor
Tensión [V] 5 o 12 Conmutable mediante software
Corriente [mA] Máx. 300
Tab. A.21 Especificaciones técnicas: conexión del encoder [X2B]
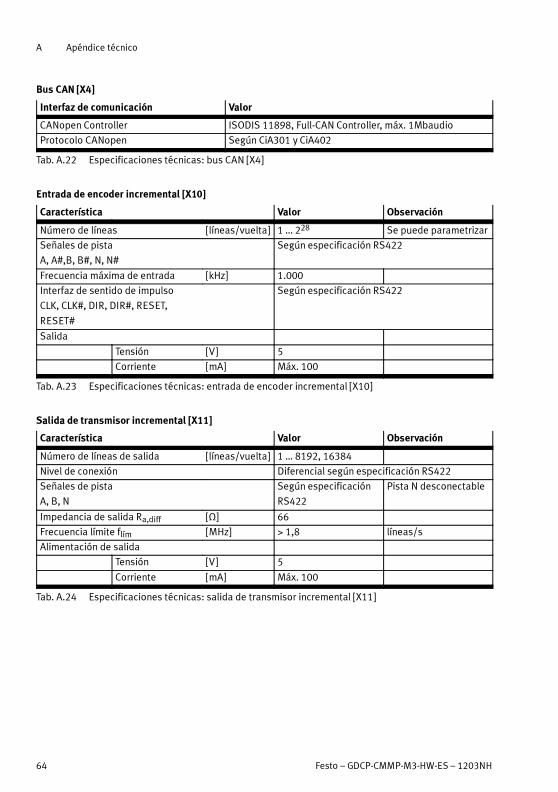
A Apéndice técnico
64 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Bus CAN [X4]
Interfaz de comunicación Valor
CANopen Controller ISODIS 11898, Full-CAN Controller, máx. 1Mbaudio
Protocolo CANopen Según CiA301 y CiA402
Tab. A.22 Especificaciones técnicas: bus CAN [X4]
Entrada de encoder incremental [X10]
Característica Valor Observación
Número de líneas [líneas/vuelta] 1 … 228 Se puede parametrizar
Señales de pista
A, A#,B, B#, N, N#
Según especificación RS422
Frecuencia máxima de entrada [kHz] 1.000
Interfaz de sentido de impulso
CLK, CLK#, DIR, DIR#, RESET,
RESET#
Según especificación RS422
Salida
Tensión [V] 5
Corriente [mA] Máx. 100
Tab. A.23 Especificaciones técnicas: entrada de encoder incremental [X10]
Salida de transmisor incremental [X11]
Característica Valor Observación
Número de líneas de salida [líneas/vuelta] 1 … 8192, 16384
Nivel de conexión Diferencial según especificación RS422
Señales de pista
A, B, N
Según especificación
RS422
Pista N desconectable
Impedancia de salida Ra,diff [Ω] 66
Frecuencia límite flím [MHz] > 1,8 líneas/s
Alimentación de salida
Tensión [V] 5
Corriente [mA] Máx. 100
Tab. A.24 Especificaciones técnicas: salida de transmisor incremental [X11]

A Apéndice técnico
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 65
A.2 Especificaciones técnicas CAMC-…
CAMC- D-E8A8 PB EC DN
Temperatura de almacenamiento [°C] -25 … +75
Temperatura de funcionamiento [°C] 0 … +50
Humedad del aire, sin condensación [%] 0 … 90
Altura de montaje permitida (sobre
el nivel del mar)
[m] ≤ 2000
Dimensiones (largo x ancho x alto) [mm] 87x65x19 92x65x19 87x65x19
Peso [g] 50 55 50
Tab. A.25 Condiciones del entorno, dimensiones y peso del CAMC-…
CAMC-D-E8A8 – Entradas digitales
Número de entradas 8
Tensión nominal [V DC] 24
Margen de tensión [V DC] -30 … +30
Detección “High” [V DC] > 8
Detección “Low” [V DC] < 2
Histéresis [V DC] > 1
Impedancia de entrada [kΩ] ≥ 4,7
Protección contra polaridad
incorrecta hasta
[V DC] -30
Retardo de conexión hasta Portpin
(transición Low-High)
[μs] < 100
Tab. A.26 CAMC-D-E8A8 – Entradas digitales
CAMC-D-E8A8 – Salidas digitales
Número de salidas 8
Tipo de interruptor Interruptor High-Side
Tensión nominal [V DC] 24
Margen de tensión [V DC] +18 … +30
Corriente nominal de salida [mA] 100
Pérdida de tensión con corriente
nominal de salida
[V DC] ≤ 1
Corriente residual en caso de
interruptor en OFF
[μA] < 100
Cortocircuito/protección de
sobreintensidad aprox.
[mA] > 500
Temperatura de desconexión [°C] > 150
Retardo de conexión hasta Portpin
(transición Low-High)
[μs] < 100
Tab. A.27 CAMC-D-E8A8 – Salidas digitales

A Apéndice técnico
66 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
A.3 Encoders compatibles
ResolverTipo Protocolo Interfaz Observación
Estándar – [X2A] Relación de transmisión
0,5 ±10 %, tensión de
excitación 7 Vrms
Tab. A.28 Resolvers compatibles
Encoders digitalesTipo Protocolo Interfaz Observación
Yaskawa ∑-En-
coder
Yaskawa-OEM-protocol [X2B] Yaskawa Sigma-1 Tipo A
Tab. A.29 Encoders digitales compatibles
Encoders analógicos
Tipo Protocolo Interfaz Observación
ROD 400
ERO 1200, 1300,
1400
ERN 100, 400,
1100, 1300
– [X2B] Heidenhain, transmisor
con impulso de puesta a
cero y señal de
referencia
Tab. A.30 Encoders analógicos compatibles
Encoders EnDatTipo Protocolo Interfaz Observación
ROC 400
ECI 1100, 1300
ECN 100, 400,
1100, 1300
EnDat 2.1 (01/21)
EnDat 2.2 (22)
[X2B] Transmisor de valor
absoluto Heidenhain
Single-turn con/sin señal
analógica
ROQ 400
EQI 1100, 1300
EQN 100, 400,
1100, 1300
EnDat 2.1 (01/21)
EnDat 2.2 (22)
[X2B] Transmisor de valor
absoluto Heidenhain
Multi-turn con/sin señal
analógica
LC 100, 400 EnDat 2.1 (01)
EnDat 2.2 (22)
[X2B] Extensómetros
absolutos Heidenhain
Tab. A.31 Encoder EnDat compatibles
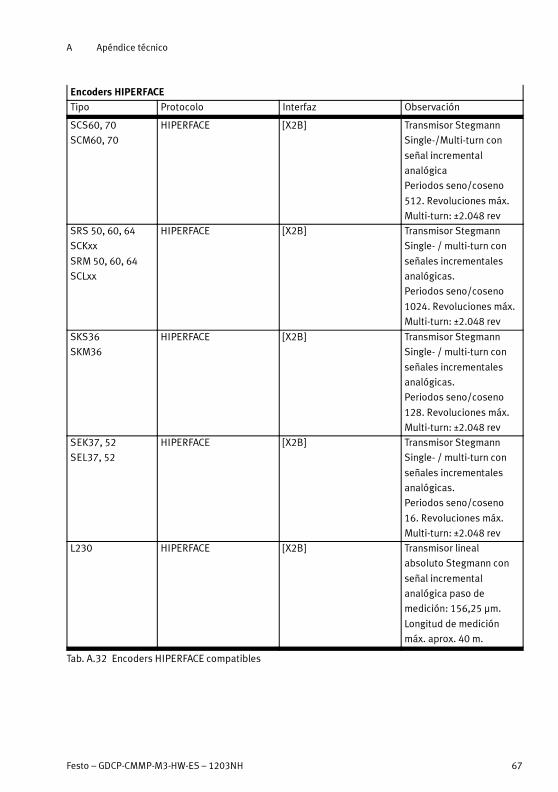
A Apéndice técnico
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 67
Encoders HIPERFACETipo Protocolo Interfaz Observación
SCS60, 70
SCM60, 70
HIPERFACE [X2B] Transmisor Stegmann
Single-/Multi-turn con
señal incremental
analógica
Periodos seno/coseno
512. Revoluciones máx.
Multi-turn: ±2.048 rev
SRS 50, 60, 64
SCKxx
SRM 50, 60, 64
SCLxx
HIPERFACE [X2B] Transmisor Stegmann
Single- / multi-turn con
señales incrementales
analógicas.
Periodos seno/coseno
1024. Revoluciones máx.
Multi-turn: ±2.048 rev
SKS36
SKM36
HIPERFACE [X2B] Transmisor Stegmann
Single- / multi-turn con
señales incrementales
analógicas.
Periodos seno/coseno
128. Revoluciones máx.
Multi-turn: ±2.048 rev
SEK37, 52
SEL37, 52
HIPERFACE [X2B] Transmisor Stegmann
Single- / multi-turn con
señales incrementales
analógicas.
Periodos seno/coseno
16. Revoluciones máx.
Multi-turn: ±2.048 rev
L230 HIPERFACE [X2B] Transmisor lineal
absoluto Stegmann con
señal incremental
analógica paso de
medición: 156,25 μm.
Longitud de medición
máx. aprox. 40 m.
Tab. A.32 Encoders HIPERFACE compatibles
A Apéndice técnico
68 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
A.4 Componentes del controlador USB
El paquete de instalación FCT contiene los siguientes componentes del controlador USB:
– “WinUSB co installer” para instalar WinUSB en el sistema de destino si es necesario. El Kit Windows
Driver (WDK) contiene archivos DLL (WinUSBCoInstaller.dll) para sistemas x86 y x64.
– KMDF (WDF kernel-mode driver framework) co installer, para instalar la versión correcta de KMDF en
el sistema de destino si es necesario.
– Un archivo INF específico de Festo para instalar “WinUsb.sys” como controlador del funcionamiento
del aparato con las siguientes entrads específicas:
– DEVICEMANAGERCATEGORY =WinUSB devices (grupo en el administrador de dispositivos)
– DeviceDesc = “<DEVICE_TYPE>” (denominación del dispositivo en el grupo en el administrador
de dispositivos) ProviderName=“Festo AG & Co. KG”
– Un “catalog file” firmado para poder realizar la instalación en sistemas x64.
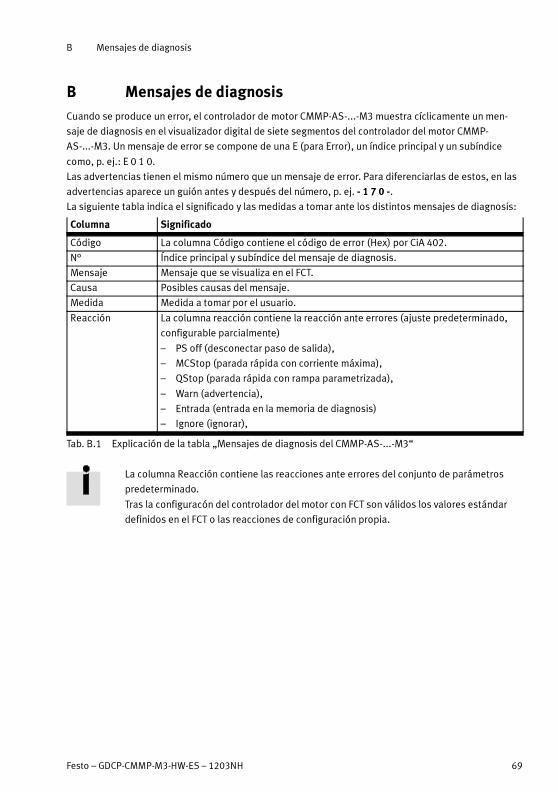
B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 69
B Mensajes de diagnosis
Cuando se produce un error, el controlador de motor CMMP-AS-...-M3 muestra cíclicamente un men-
saje de diagnosis en el visualizador digital de siete segmentos del controlador del motor CMMP-
AS-...-M3. Un mensaje de error se compone de una E (para Error), un índice principal y un subíndice
como, p. ej.: E 0 1 0.
Las advertencias tienen el mismo número que unmensaje de error. Para diferenciarlas de estos, en las
advertencias aparece un guión antes y después del número, p. ej. - 1 7 0 -.La siguiente tabla indica el significado y las medidas a tomar ante los distintos mensajes de diagnosis:
Columna Significado
Código La columna Código contiene el código de error (Hex) por CiA 402.
N° Índice principal y subíndice del mensaje de diagnosis.
Mensaje Mensaje que se visualiza en el FCT.
Causa Posibles causas del mensaje.
Medida Medida a tomar por el usuario.
Reacción La columna reacción contiene la reacción ante errores (ajuste predeterminado,
configurable parcialmente)
– PS off (desconectar paso de salida),
– MCStop (parada rápida con corriente máxima),
– QStop (parada rápida con rampa parametrizada),
– Warn (advertencia),
– Entrada (entrada en la memoria de diagnosis)
– Ignore (ignorar),
Tab. B.1 Explicación de la tabla „Mensajes de diagnosis del CMMP-AS-...-M3“
La columna Reacción contiene las reacciones ante errores del conjunto de parámetros
predeterminado.
Tras la configuracón del controlador del motor con FCT son válidos los valores estándar
definidos en el FCT o las reacciones de configuración propia.

B Mensajes de diagnosis
70 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3N° Mensaje Causas Medidas Reacción
00-0 Error no válido Información: se ha marcadouna entrada de error noválida (corrupta) con estenúmero de error en la memor-ia de diagnosis.La entrada de la hora del sis-tema se ajusta en ”0”.
– Entrada
00-1 Error no válidodetectado y cor-regido
Información: se ha detectadoy corregido una entrada deerror no válida (corrupta) enla memoria de diagnosis. Enla información adicional seencuentra el número de errororiginal.La entrada de la hora del sis-tema incluye la dirección delnúmero de error corrupto.
– Entrada
00-2 Error borrado Información: se han validadoerrores activos.
– Entrada
01-0 Stack overflow ¿Firmware incorrecto?Carga de cálculo es-porádicamente alta a causade tiempo de ciclo demas-iado corto y procesos espec-iales de cálculo intensivo(guardar conjunto deparámetros etc.).
• Cargar un firmwareautorizado.
• Reducir la carga decálculo.
• Contactar con el soportetécnico.
PS off
02-0 Baja tensión en elcircuito intermed-io
La tensión del circuito inter-medio desciende por debajodel umbral parametrizado. 1)
¿Se ha ajustado unaprioridad de error muy alta?
• Descarga rápida a causade alimentación de reddesconectada.
• Comprobar laalimentación de potencia.
• Acoplar los circuitosintermedios si estécnicamente posible.
• Comprobar (medir)tensión del circuitointermedio.
Con-figurab-le
1) Información adicional en PNU 203/213:
16 bits superiores: número de estado de máquina de estado interna
16 bits inferiores: tensión del circuito intermedio (escalado interno aprox. 17,1 digit/V).

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 71
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
03-0 Exceso de tem-peratura demotor analógico
Motor sobrecargado, tem-peratura demasiado alta.– ¿Se ha parametrizado el
sensor adecuado o su cur-va característica?
– ¿Sensor averiado?
En caso de sobrecarga:• Comprobar la paramet-
rización (regulador de cor-riente, valores límite decorriente).
• Comprobar la paramet-rización del sensor o sucurva característica.
Si se dan errores inclusocuando el sensor está puen-teado: aparato averiado.
QStop
03-1 Exceso de tem-peratura demotor digital
Motor sobrecargado, tem-peratura demasiado alta.– ¿Se ha parametrizado el
sensor adecuado o su cur-va característica?
– ¿Sensor averiado?
En caso de sobrecarga:• Comprobar la paramet-
rización (regulador de cor-riente, valores límite decorriente).
• Comprobar la paramet-rización del sensor o sucurva característica.
Si se dan errores inclusocuando el sensor está puen-teado: aparato averiado.
Con-figurab-le
03-2 Exceso de tem-peratura demotor analógico:rotura de hilo
El valor medido de las resis-tencias está por encima delumbral para la detección derotura de cables.
• Comprobar que los cablesde conexión del sensor detemperatura no esténrotos.
• Comprobar la paramet-rización (valor umbral) dela detección de rotura decables.
Con-figurab-le
03-3 Exceso de tem-peratura demotor analógico:cortocircuito
El valor medido de las resis-tencias está por debajo delumbral para la detección decortocircuito.
• Comprobar que los cablesde conexión del sensor detemperatura no esténrotos.
• Comprobar la paramet-rización (valor umbral) dela detección de cortocir-cuito.
Con-figurab-le
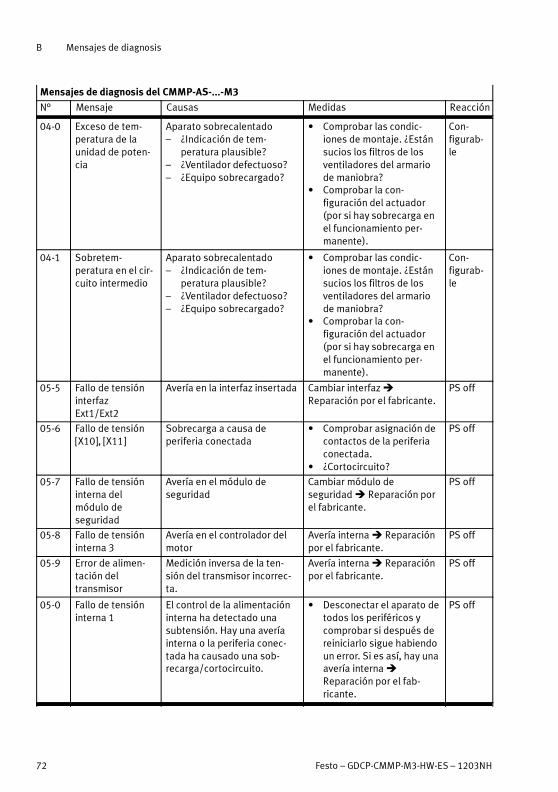
B Mensajes de diagnosis
72 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
04-0 Exceso de tem-peratura de launidad de poten-cia
Aparato sobrecalentado– ¿Indicación de tem-
peratura plausible?– ¿Ventilador defectuoso?– ¿Equipo sobrecargado?
• Comprobar las condic-iones de montaje. ¿Estánsucios los filtros de losventiladores del armariode maniobra?
• Comprobar la con-figuración del actuador(por si hay sobrecarga enel funcionamiento per-manente).
Con-figurab-le
04-1 Sobretem-peratura en el cir-cuito intermedio
Aparato sobrecalentado– ¿Indicación de tem-
peratura plausible?– ¿Ventilador defectuoso?– ¿Equipo sobrecargado?
• Comprobar las condic-iones de montaje. ¿Estánsucios los filtros de losventiladores del armariode maniobra?
• Comprobar la con-figuración del actuador(por si hay sobrecarga enel funcionamiento per-manente).
Con-figurab-le
05-5 Fallo de tensióninterfazExt1/Ext2
Avería en la interfaz insertada Cambiar interfazReparación por el fabricante.
PS off
05-6 Fallo de tensión[X10], [X11]
Sobrecarga a causa deperiferia conectada
• Comprobar asignación decontactos de la periferiaconectada.
• ¿Cortocircuito?
PS off
05-7 Fallo de tensióninterna delmódulo deseguridad
Avería en el módulo deseguridad
Cambiar módulo deseguridad Reparación porel fabricante.
PS off
05-8 Fallo de tensióninterna 3
Avería en el controlador delmotor
Avería interna Reparaciónpor el fabricante.
PS off
05-9 Error de alimen-tación deltransmisor
Medición inversa de la ten-sión del transmisor incorrec-ta.
Avería interna Reparaciónpor el fabricante.
PS off
05-0 Fallo de tensióninterna 1
El control de la alimentacióninterna ha detectado unasubtensión. Hay una averíainterna o la periferia conec-tada ha causado una sob-recarga/cortocircuito.
• Desconectar el aparato detodos los periféricos ycomprobar si después dereiniciarlo sigue habiendoun error. Si es así, hay unaavería internaReparación por el fab-ricante.
PS off

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 73
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
05-1 Fallo de tensióninterna 2
El control de la alimentacióninterna ha detectado unasubtensión. Hay una averíainterna o la periferia conec-tada ha causado una sob-recarga/cortocircuito.
• Desconectar el aparato detodos los periféricos ycomprobar si después dereiniciarlo sigue habiendoun error. Si es así, hay unaavería internaReparación por el fab-ricante.
PS off
05-2 Fallo de alimen-tación del ex-citador
El control de la alimentacióninterna ha detectado unasubtensión. Hay una averíainterna o la periferia conec-tada ha causado una sob-recarga/cortocircuito.
• Desconectar el aparato detodos los periféricos ycomprobar si después dereiniciarlo sigue habiendoun error. Si es así, hay unaavería internaReparación por el fab-ricante.
PS off
05-3 Subtensión enI/O digitales
¿Periferia averiada? • Comprobar que no hayacortocircuitos ni carga es-pecificada en la periferiaconectada.
• Comprobar la conexióndel freno (¿está malconectada?).
PS off
05-4 Sobrecorrienteen I/O digitales
¿Periferia averiada? • Comprobar que no hayacortocircuitos ni carga es-pecificada en la periferiaconectada.
• Comprobar la conexióndel freno (¿está malconectada?).
PS off

B Mensajes de diagnosis
74 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
06-0 Cortocircuito enpaso de salida
– Motor averiado, p. ej.,cortocircuito entre es-piras debido al sob-recalentamiento delmotor o cortocircuito in-terno del motor a PE.
– Cortocircuito en el cable oen las clavijas deconexión, es decir, cor-tocircuito de las fases delmotor entre sí o contra elapantallamiento/PE.
– Paso de salida defectuoso(cortocircuito).
– Parametrización incorrec-ta del regulador de cor-riente.
Depende del estado del eq-uipo Nota al pie 2), casos a) …hasta f )
PS off
06-1 Sobrecorrientechopper defrenado
Sobrecorriente en la salidadel chopper de frenado.
• Comprobar si hay cor-tocircuito o un valor deresistencia demasiadobajo en la resistencia defrenado externa.
• Comprobar el circuito dela salida del chopper defrenado en el controladordel motor (puente, etc.).
PS off
2) Medidas:
Caso a) Error solo en caso de chopper de frenado activo: comprobar si hay cortocircuito o un valor de resistencia demasiado bajo
en la resistencia de frenado externa. Comprobar el circuito de la salida del chopper de frenado en el controlador del motor
(puente, etc.).
Caso b) El mensaje de error se emite inmediatamente al conectar la alimentación de potencia: cortocircuito interno en el paso de
salida (cortocircuito de un medio puente completo). El controlador del motor ya no puede conectarse a la alimentación de
potencia; los fusibles internos (y, si es necesario, los externos) saltan. El equipo debe ser reparado por el fabricante.
Caso c) El mensaje de cortocircuito se emite solo al activar la habilitación de los pasos de salida o los reguladores.
Caso d) Desconectar el conector del motor [X6] directamente en el controlador del motor. Si el fallo sigue apareciendo, hay una
avería en el controlador del motor. El equipo debe ser reparado por el fabricante.
Caso E) Si el fallo aparece solo cuando el cable del motor está conectado: comprobar si hay cortocirtuitos en el motor y en el
cable, p. ej. con un multímetro.
Caso f ) Comprobar la parametrización del regulador de corriente. Si el regulador de corriente está mal parametrizado, las
oscilaciones pueden generar corrientes que alcancen el límite de cortocircuito. Por lo general, esto se detecta fácilmente debido
a que se oye un silbido de una frecuencia muy alta. Realice la verificación, si es necesario, con la función Trace del FCT (valor
real de corriente activa).

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 75
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
07-0 Sobretensión enel circuito inter-medio
La resistencia de frenado sesobrecarga, demasiada ener-gía de frenado que no puedeeliminarse con la rapideznecesaria.– ¿Dimensionado incorrecto
de la resistencia?– ¿Resistencia conectada
incorrectamente?
• Comprobar el dimen-sionado de la resistenciade frenado, puede que suvalor sea demasiado alto.
• Comprobar la conexión ala resistencia de frenado(interna/externa).
PS off
08-0 Error deltransductor an-gular del resolver
Amplitud de señal del resol-ver errónea
Proceder paso a paso Nota al pie 3), a) … c):
Con-figurab-le
08-1 El sentido de girode la detecciónde posición in-cremental no esigual
Solo transmisor contransmisión serial de laposición combinada con unapista de señal SIN/COSanalógica: el sentido de girode la determinación deposición interna deltransmisor y la evaluación in-cremental del sistema de pis-tas analógico del controladordel motor se han intercam-biado. Nota al pie 4)
• Cambiar las señales sigu-ientes en la interfaz delencoder [X2B] (esnecesario modificar los hi-los del conector tipoclavija), observar la hojade datos del encoder:
– Cambiar las pistas SIN/COS.
– Cambiar las señalesSIN+/SIN- o COS+/COS-.
Con-figurab-le
3) a) Si es posible, realizar la prueba con otro resolver (sin fallos; cambiar también el cable de conexión). Si el fallo sigue aparec-
iendo, hay una avería en el controlador del motor. El equipo debe ser reparado por el fabricante.
b) Si el fallo aparece solo con un resolver especial y su cable de conexión: comprobar señales del resolver (soporte y señales
SIN/COS), ver especificación. Si no se respeta la especificación de la señal, es necesario cambiar el resolver.
c) Si el fallo vuelve a aparecer esporádicamente, examinar la conexión de apantallamiento o comprobar si el resolver presenta
una relación de transmisión demasiado baja (resolver normalizado: A = 0,5).
4) El transmisor cuenta internamente, p. ej., en positivo en el sentido de las agujas del reloj, mientras que la evaluación incremen-
tal cuenta en sentido negativo con el mismo giro mecánico. En el primer movimiento mecánico superior a 30 se detecta que el
sentido de giro es incorrecto y el fallo se activa.

B Mensajes de diagnosis
76 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
08-2 Error señales depista Z0 encoderincremental
Amplitud errónea de lasseñales de la pista Z0 en[X2B].– ¿Transductor angular
conectado?– ¿Cable del transductor an-
gular averiado?– ¿Transductor angular
averiado?
Comprobar la configuraciónde la interfaz del transductorangular:a) La evaluación Z0 está ac-
tivada pero las señales depista no están conectadaso no existen. 5)
b) ¿Señales incorrectas deltransmisor?
c) Hacer una prueba con ot-ro transmisor.
Tab. B.3, página 110.
Con-figurab-le
08-3 Error señales depista Z1 encoderincremental
Amplitud de señal errónea dela pista Z1 en X2B.– ¿Transductor angular
conectado?– ¿Cable del transductor an-
gular averiado?– ¿Transductor angular
averiado?
Comprobar la configuraciónde la interfaz del transductorangular:a) Evaluación Z1 activada
pero no conectada.b) ¿Señales incorrectas del
transmisor?c) Hacer una prueba con ot-
ro transmisor. Tab. B.3, página 110.
Con-figurab-le
08-4 Error señales depista transmisorincrementaldigital [X2B]
Señales erróneas de pistas A,B, o N en [X2B].– ¿Transductor angular
conectado?– ¿Cable del transductor an-
gular averiado?– ¿Transductor angular
averiado?
Comprobar la configuraciónde la interfaz del transductorangular. Procedimiento con-forme a los pasos a) y b):a) ¿Señales incorrectas del
transmisor?b) Hacer una prueba con ot-
ro transmisor. Tab. B.3, página 110.
Con-figurab-le
08-5 Error de señalesde transmisorHall detransmisor in-cremental
Señales de transmisor Hall deun transmisor incrementaldigital en [X2B] erróneas.– ¿Transductor angular
conectado?– ¿Cable del transductor an-
gular averiado?– ¿Transductor angular
averiado?
Comprobar la configuraciónde la interfaz del transductorangular. Procedimiento con-forme a los pasos a) y b):a) ¿Señales incorrectas del
transmisor?b) Hacer una prueba con ot-
ro transmisor. Tab. B.3, página 110.
Con-figurab-le
5) P. ej. EnDat 2.2 o EnDat 2.1 sin pista analógica.
Transmisor Heidenhain: referencias EnDat 22 y EnDat 21. En estos transmisores no hay señales incrementales, incluso cuando
los cables están conectados.

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 77
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
08-6 Fallo decomunicación delencoder
Mala comunicación con losencoders seriales (transmisorEnDat, transmisor HIPER-FACE, transmisor BiSS).– ¿Transductor angular
conectado?– ¿Cable del transductor an-
gular averiado?– ¿Transductor angular
averiado?
Comprobar la configuraciónde la interfaz del transductorangular: procedimiento con-forme a los pasos a) … b):a) ¿Transmisor serial
parametrizado pero noconectado?¿El protocolo en serieelegido es incorrecto?
b) ¿Señales incorrectas deltransmisor?
c) Hacer una prueba con ot-ro transmisor.
Tab. B.3, página 110.
Con-figurab-le
08-7 Amplitud erróneade las señales delas pistas in-crementales[X10]
Señales erróneas de pistas A,B, o N en [X10].– ¿Transductor angular
conectado?– ¿Cable del transductor an-
gular averiado?– ¿Transductor angular
averiado?
Comprobar la configuraciónde la interfaz del transductorangular. Procedimiento con-forme a los pasos a) y b):a) ¿Señales incorrectas del
transmisor?b) Hacer una prueba con ot-
ro transmisor. Tab. B.3, página 110.
Con-figurab-le
08-8 Fallo interno deltransductor an-gular
La monitorización interna delencoder [X2B] ha detectadoun fallo y lo ha transmitido alregulador través de lacomunicación serial.– Intensidad lumínica
remisiva en transmisoresópticos
– Número de revolucionesexcedido
– ¿Transductor angularaveriado?
Si el error se produce persis-tentemente, el transmisor es-tá averiado. Cambiar eltransmisor.
Con-figurab-le
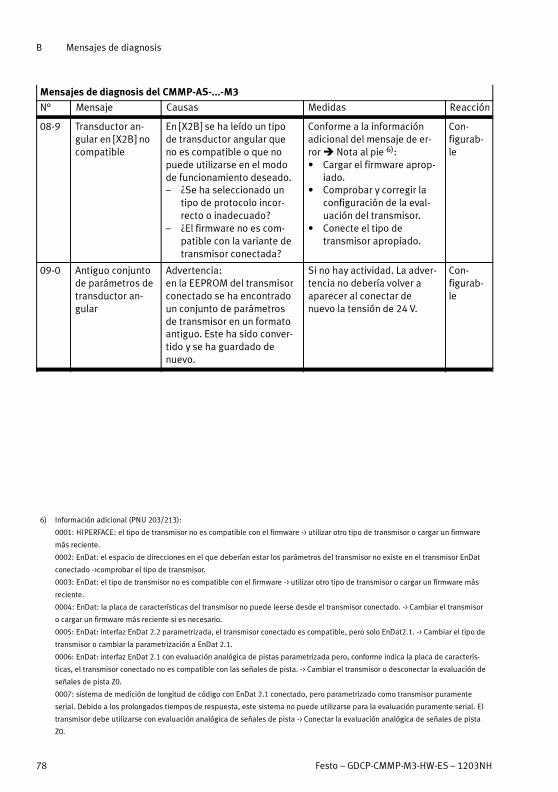
B Mensajes de diagnosis
78 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
08-9 Transductor an-gular en [X2B] nocompatible
En [X2B] se ha leído un tipode transductor angular queno es compatible o que nopuede utilizarse en el modode funcionamiento deseado.– ¿Se ha seleccionado un
tipo de protocolo incor-recto o inadecuado?
– ¿El firmware no es com-patible con la variante detransmisor conectada?
Conforme a la informaciónadicional del mensaje de er-ror Nota al pie 6):• Cargar el firmware aprop-
iado.• Comprobar y corregir la
configuración de la eval-uación del transmisor.
• Conecte el tipo detransmisor apropiado.
Con-figurab-le
09-0 Antiguo conjuntode parámetros detransductor an-gular
Advertencia:en la EEPROM del transmisorconectado se ha encontradoun conjunto de parámetrosde transmisor en un formatoantiguo. Este ha sido conver-tido y se ha guardado denuevo.
Si no hay actividad. La adver-tencia no debería volver aaparecer al conectar denuevo la tensión de 24 V.
Con-figurab-le
6) Información adicional (PNU 203/213):
0001: HIPERFACE: el tipo de transmisor no es compatible con el firmware -> utilizar otro tipo de transmisor o cargar un firmware
más reciente.
0002: EnDat: el espacio de direcciones en el que deberían estar los parámetros del transmisor no existe en el transmisor EnDat
conectado ->comprobar el tipo de transmisor.
0003: EnDat: el tipo de transmisor no es compatible con el firmware -> utilizar otro tipo de transmisor o cargar un firmware más
reciente.
0004: EnDat: la placa de características del transmisor no puede leerse desde el transmisor conectado. -> Cambiar el transmisor
o cargar un firmware más reciente si es necesario.
0005: EnDat: interfaz EnDat 2.2 parametrizada, el transmisor conectado es compatible, pero solo EnDat2.1. -> Cambiar el tipo de
transmisor o cambiar la parametrización a EnDat 2.1.
0006: EnDat: interfaz EnDat 2.1 con evaluación analógica de pistas parametrizada pero, conforme indica la placa de caracterís-
ticas, el transmisor conectado no es compatible con las señales de pista. -> Cambiar el transmisor o desconectar la evaluación de
señales de pista Z0.
0007: sistema de medición de longitud de código con EnDat 2.1 conectado, pero parametrizado como transmisor puramente
serial. Debido a los prolongados tiempos de respuesta, este sistema no puede utilizarse para la evaluación puramente serial. El
transmisor debe utilizarse con evaluación analógica de señales de pista -> Conectar la evaluación analógica de señales de pista
Z0.

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 79
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
09-1 No se puede des-codificar el con-junto de parámet-ros del encoder
Los datos en la EEPROM delencoder no han podido leersepor completo o se hadenegado parcialmente el ac-ceso.
En la EEPROM del transmisorhay datos (objetos decomunicación) que no sonsoportados por el firmwarecargado. Estos datos seeliminan.• El conjunto de parámetros
puede adaptarse alfirmware actual escribien-do los datos deltransmisor en eltransmisor.
• Alternativamente cargarun firmware adecuado(más reciente).
Con-figurab-le
09-2 Versión des-conocida de con-junto de parámet-ros de transduc-tor angular
Los datos guardados en laEEPROM no son compatiblescon la versión actual. Se haencontrado una estructura dedatos que el firmware car-gado no puede descodificar.
• Guarde de nuevo losparámetros deltransmisor para borrar elconjunto de parámetrosdel transmisor y cambiar-lo por un conjunto quepueda leerse (los datos seborran permanentementedel transmisor).
• Alternativamente cargarun firmware adecuado(más reciente).
Con-figurab-le
09-3 Estructura dedatos defectuosade conjunto deparámetros deencoder
Los datos en la EEPROM noson apropiados para la es-tructura de datos guardada.La estructura se ha dado porválida, pero puede que estécorrupta.
• Vuelva a guardar losparámetros deltransmisor para borrar elconjunto de parámetrosdel transmisor y cambiar-lo por un conjunto quepueda leerse. Si el fallosigue apareciendo, puedeque el transmisor estéaveriado.
• Cambie el transmisor amodo de prueba.
Con-figurab-le

B Mensajes de diagnosis
80 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
09-4 Datos EEPROM:la configuraciónespecífica delcliente es errónea
Solo en motores especiales:en la verificación deplausibilidad se ha encon-trado un fallo, p. ej., porqueel motor ha sido reparado osustituido.
• Si se ha reparado elmotor: referenciarlo denuevo y guardar los datosen el transductor angular.A continuación (!) guar-darlos en el controladordel motor.
• Si se ha cambiado elmotor: volver a paramet-rizar el controlador, a con-tinuación referenciarlo denuevo y guardar los datosen el transductor angular;después (!) guardarlos enel controlador del motor.
Con-figurab-le
09-7 EEPROM detransductor an-gular con protec-ción de escritura
No es posible guardar losdatos en el EEPROM deltransductor angular.Aparece en transmisores Hi-perface.
Un campo de datos de la EEP-ROM del transmisor es solode lectura (p. ej., después delfuncionamiento en un con-trolador del motor de otrofabricante). No hay solución.La memoria del transmisordebe desbloquearse con laherramienta de paramet-rización correspondiente (delfabricante).
Con-figurab-le
09-9 EEPROM deltransductor an-gular demasiadopequeña
No han podido guardarsetodos los datos en la EEP-ROM del transductor angular.
• Reducir el número de losconjuntos de datos quedeben guardarse. Leer ladocumentación o contac-tar con el soporte técnico.
Con-figurab-le
10-0 Exceso derevoluciones(protección degiro)
– El motor ha sobrepasadoel tope de giro porque eldesplazamiento del án-gulo de conmutación esincorrecto.
– El motor está paramet-rizado correctamentepero el valor límite de laprotección antigiro se haajustado demasiado bajo.
• Comprobar el desplazam-iento del ángulo de con-mutación.
• Comprobar la paramet-rización del valor límite.
Con-figurab-le
11-0 Error al iniciarseel recorrido dereferencia
Falta la habilitación delregulador.
Solo es posible iniciar elrecorrido de referencia cuan-do la habilitación delregulador está activado.• Comprobar la condición o
la secuencia.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 81
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
11-1 Error durante elrecorrido dereferencia
El recorrido de referencia seha interrumpido, p. ej.,debido a:– Cancelación del desbloq-
ueo del regulador.– El interruptor de referen-
cia está detrás del detec-tor de final de carrera.
– Señal externa de parada(interrupción de una fasedel recorrido de referen-cia).
• Comprobar la secuenciadel recorrido de referen-cia.
• Comprobar la disposiciónde los detectores.
• Bloquear la entrada deparada durante el recor-rido de referencia si lodesea.
Con-figurab-le
11-3 Recorrido dereferencia: tiem-po sobrepasado
Se alcanzó el tiempo máximoparametrizado para el recor-rido de referencia, antes in-cluso de que finalizara elrecorrido de referencia.
• Comprobar la paramet-rización del tiempo.
Con-figurab-le
11-4 Recorrido dereferencia: detec-tor de final decarrera incorrecto/ no válido
– Detector de final de car-rera pertinente no conec-tado.
– ¿Se han intercambiadolos detectores de final decarrera?
– No se ha encontrado nin-gún interruptor dereferencia entre ambosdetectores de final de car-rera.
– El interruptor de referen-cia está sobre el detectorde final de carrera.
– Método: ”Posición actualcon impulso de puesta acero”: detector de final decarrera activado dentrode la zona de impulso depuesta a cero (no per-mitido).
– Ambos detectores de finalde carrera activados almismo tiempo.
• Comprobar si los detec-tores de final de carreraestán conectados en elsentido de la marcha cor-recto o si los detectoresde final de carrera afectana las entradas previstas.
• ¿Interruptor de referenciaconectado?
• Comprobar la disposicióndel interruptor de referen-cia.
• Desplazar el detector definal de carrera de modoque no se encuentre en lazona de impulso de pues-ta a cero.
• Comprobar la paramet-rización del detector definal de carrera (contactonormalmente cerrado/ab-ierto).
Con-figurab-le

B Mensajes de diagnosis
82 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
11-5 Recorrido dereferencia: It /error de seguim-iento
– Rampas de aceleraciónparametrizadas demanera inadecuada.
– Cambio de sentido med-iante error de seguimien-to activadoprematuramente, com-probar la parametrizacióndel error de seguimiento.
– No se ha alcanzado nin-gún interruptor dereferencia entre los topesfinales.
– Método impulso de pues-ta a cero: tope final alcan-zado (aquí, no permitido).
• Parametrizar las rampasde aceleración másplanas.
• Comprobar la conexión deun interruptor de referen-cia.
• ¿Métodos apropiadospara la aplicación?
Con-figurab-le
11-6 Recorrido dereferencia: finaldel recorrido debúsqueda
Ha concluido el trayectomáximo permitido del recor-rido de referencia sin que sehaya alcanzado el punto dereferencia ni el destino delrecorrido de referencia.
Fallo en la detección del inter-ruptor.• ¿Interruptor del recorrido
de referencia averiado?
Con-figurab-le
11-7 Recorrido dereferencia: errorde supervisión dediferencia entretransmisores
La discrepancia entre el valorreal de posición y la posiciónde conmutación es demas-iado alta. ¿Encoder externono conectado o averiado?
• La discrepancia varía,p. ej., debido al juego delos engranajes. Si esnecesario, ampliar el um-bral de desconexión.
• Comprobar la conexióndel transmisor de valor re-al.
Con-figurab-le
12-0 CAN: número denodo por dup-licado
Número de nodo asignadodos veces.
• Comprobar la con-figuración de participan-tes en el bus CAN.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 83
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
12-1 CAN: fallo decomunicación,bus DESCONEC-TADO
El chip CAN ha desconectadola comunicación debido a fal-los de comunicación (BUSOFF).
• Comprobar el cableado:¿se ha respetado la es-pecificación de cables;rotura de cables; longitudmáxima de cables ex-cedida; resistencias determinación correctas;apantallado del cablepuesto a tierra; todas lasseñales aplicadas?
• Cambiar el equipo a modode prueba. Si otro equipocon el mismo cableadofunciona sin fallos, enviarel equipo al fabricantepara su comprobación.
Con-figurab-le
12-2 CAN: fallos decomunicacióndurante el envío
Al enviar mensajes, lasseñales están perturbadas.Encender el equipo tanrápido de manera que al en-viar el mensaje de arranqueno pueda detectarse ningúnotro nodo en el bus.
• Comprobar el cableado:¿se ha respetado la es-pecificación de cables;rotura de cables; longitudmáxima de cables ex-cedida; resistencias determinación correctas;apantallado del cablepuesto a tierra; todas lasseñales aplicadas?
• Cambiar el equipo a modode prueba. Si otro equipocon el mismo cableadofunciona sin fallos, enviarel equipo al fabricantepara su comprobación.
• Comprobar la secuenciade inicio de la aplicación.
Con-figurab-le

B Mensajes de diagnosis
84 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
12-3 CAN: fallos decomunicacióndurante la recep-ción
Al recibir mensajes lasseñales están perturbadas.
• Comprobar el cableado:¿se ha respetado la es-pecificación de cables;rotura de cables; longitudmáxima de cables ex-cedida; resistencias determinación correctas;apantallado del cablepuesto a tierra; todas lasseñales aplicadas?
• Cambiar el equipo a modode prueba. Si otro equipocon el mismo cableadofunciona sin fallos, enviarel equipo al fabricantepara su comprobación.
Con-figurab-le
12-4 CAN: Node Guar-ding
No se recibe ningún teleg-rama de Node Guarding en eltranscurso del tiempoparametrizado.¿Perturbación de señales?
• Compensar el tiempo deciclo de trama remota conel control.
• Comprobar: ¿fallo del con-trol?
Con-figurab-le
12-5 CAN: RPDOdemasiado corto
Un RPDO recibido no incluyeel número de bytes paramet-rizados.
El número de los bytesparametrizados no es igual alnúmero de los bytesrecibidos.• Comprobar y corregir la
parametrización.
Con-figurab-le
12-9 CAN: error deprotocolo
Protocolo erróneo de bus. • Comprobar la paramet-rización del protocolo delbus CAN seleccionado.
Con-figurab-le
13-0 Timeout de busCAN
Mensaje de error delprotocolo específico del fab-ricante.
• Comprobar la paramet-rización CAN.
Con-figurab-le
14-0 Alimentación in-suficiente paraidentificación
Los parámetros del reguladorde corriente no pueden deter-minarse (no hay alimentaciónsuficiente).
La tensión disponible del cir-cuito intermedio es insufic-iente para realizar lamedición.
PS off
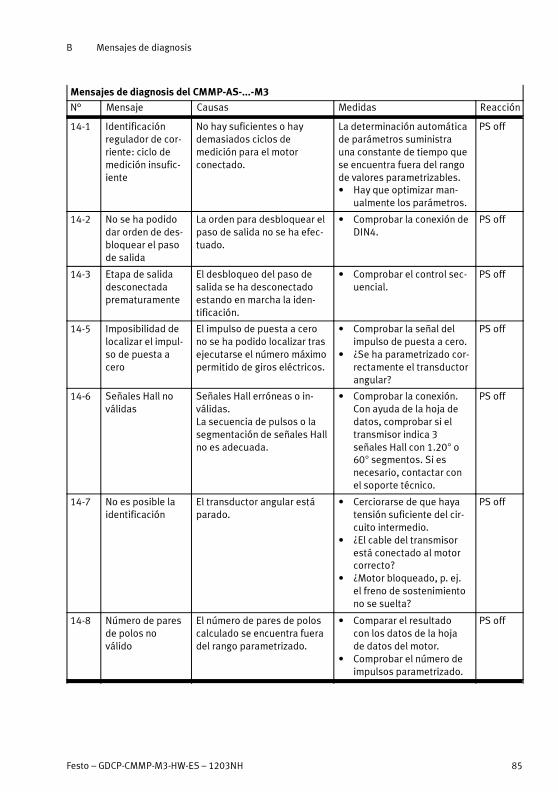
B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 85
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
14-1 Identificaciónregulador de cor-riente: ciclo demedición insufic-iente
No hay suficientes o haydemasiados ciclos demedición para el motorconectado.
La determinación automáticade parámetros suministrauna constante de tiempo quese encuentra fuera del rangode valores parametrizables.• Hay que optimizar man-
ualmente los parámetros.
PS off
14-2 No se ha podidodar orden de des-bloquear el pasode salida
La orden para desbloquear elpaso de salida no se ha efec-tuado.
• Comprobar la conexión deDIN4.
PS off
14-3 Etapa de salidadesconectadaprematuramente
El desbloqueo del paso desalida se ha desconectadoestando en marcha la iden-tificación.
• Comprobar el control sec-uencial.
PS off
14-5 Imposibilidad delocalizar el impul-so de puesta acero
El impulso de puesta a cerono se ha podido localizar trasejecutarse el número máximopermitido de giros eléctricos.
• Comprobar la señal delimpulso de puesta a cero.
• ¿Se ha parametrizado cor-rectamente el transductorangular?
PS off
14-6 Señales Hall noválidas
Señales Hall erróneas o in-válidas.La secuencia de pulsos o lasegmentación de señales Hallno es adecuada.
• Comprobar la conexión.Con ayuda de la hoja dedatos, comprobar si eltransmisor indica 3señales Hall con 1.20° o60° segmentos. Si esnecesario, contactar conel soporte técnico.
PS off
14-7 No es posible laidentificación
El transductor angular estáparado.
• Cerciorarse de que hayatensión suficiente del cir-cuito intermedio.
• ¿El cable del transmisorestá conectado al motorcorrecto?
• ¿Motor bloqueado, p. ej.el freno de sostenimientono se suelta?
PS off
14-8 Número de paresde polos noválido
El número de pares de poloscalculado se encuentra fueradel rango parametrizado.
• Comparar el resultadocon los datos de la hojade datos del motor.
• Comprobar el número deimpulsos parametrizado.
PS off
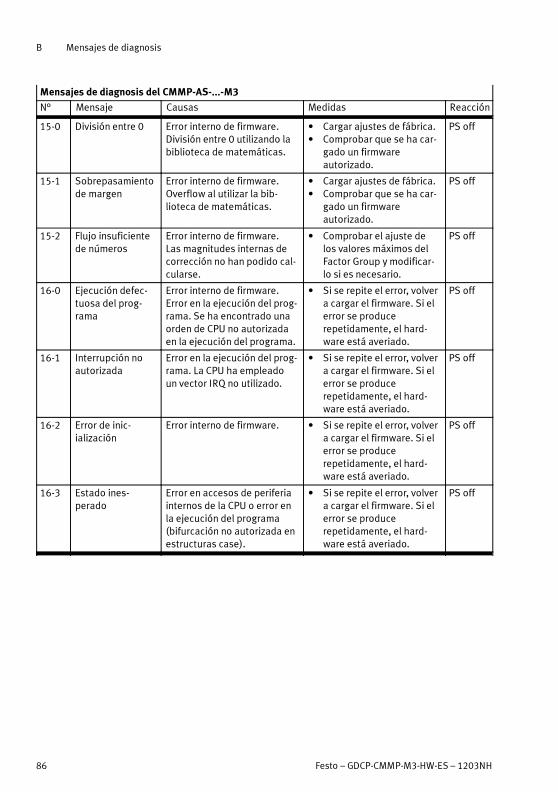
B Mensajes de diagnosis
86 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
15-0 División entre 0 Error interno de firmware.División entre 0 utilizando labiblioteca de matemáticas.
• Cargar ajustes de fábrica.• Comprobar que se ha car-
gado un firmwareautorizado.
PS off
15-1 Sobrepasamientode margen
Error interno de firmware.Overflow al utilizar la bib-lioteca de matemáticas.
• Cargar ajustes de fábrica.• Comprobar que se ha car-
gado un firmwareautorizado.
PS off
15-2 Flujo insuficientede números
Error interno de firmware.Las magnitudes internas decorrección no han podido cal-cularse.
• Comprobar el ajuste delos valores máximos delFactor Group y modificar-lo si es necesario.
PS off
16-0 Ejecución defec-tuosa del prog-rama
Error interno de firmware.Error en la ejecución del prog-rama. Se ha encontrado unaorden de CPU no autorizadaen la ejecución del programa.
• Si se repite el error, volvera cargar el firmware. Si elerror se producerepetidamente, el hard-ware está averiado.
PS off
16-1 Interrupción noautorizada
Error en la ejecución del prog-rama. La CPU ha empleadoun vector IRQ no utilizado.
• Si se repite el error, volvera cargar el firmware. Si elerror se producerepetidamente, el hard-ware está averiado.
PS off
16-2 Error de inic-ialización
Error interno de firmware. • Si se repite el error, volvera cargar el firmware. Si elerror se producerepetidamente, el hard-ware está averiado.
PS off
16-3 Estado ines-perado
Error en accesos de periferiainternos de la CPU o error enla ejecución del programa(bifurcación no autorizada enestructuras case).
• Si se repite el error, volvera cargar el firmware. Si elerror se producerepetidamente, el hard-ware está averiado.
PS off
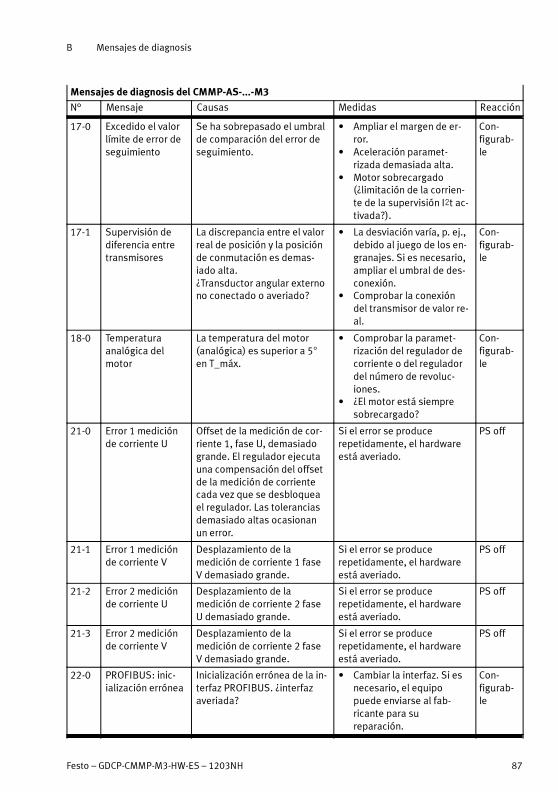
B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 87
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
17-0 Excedido el valorlímite de error deseguimiento
Se ha sobrepasado el umbralde comparación del error deseguimiento.
• Ampliar el margen de er-ror.
• Aceleración paramet-rizada demasiada alta.
• Motor sobrecargado(¿limitación de la corrien-te de la supervisión It ac-tivada?).
Con-figurab-le
17-1 Supervisión dediferencia entretransmisores
La discrepancia entre el valorreal de posición y la posiciónde conmutación es demas-iado alta.¿Transductor angular externono conectado o averiado?
• La desviación varía, p. ej.,debido al juego de los en-granajes. Si es necesario,ampliar el umbral de des-conexión.
• Comprobar la conexióndel transmisor de valor re-al.
Con-figurab-le
18-0 Temperaturaanalógica delmotor
La temperatura del motor(analógica) es superior a 5°en T_máx.
• Comprobar la paramet-rización del regulador decorriente o del reguladordel número de revoluc-iones.
• ¿El motor está siempresobrecargado?
Con-figurab-le
21-0 Error 1 mediciónde corriente U
Offset de la medición de cor-riente 1, fase U, demasiadogrande. El regulador ejecutauna compensación del offsetde la medición de corrientecada vez que se desbloqueael regulador. Las toleranciasdemasiado altas ocasionanun error.
Si el error se producerepetidamente, el hardwareestá averiado.
PS off
21-1 Error 1 mediciónde corriente V
Desplazamiento de lamedición de corriente 1 faseV demasiado grande.
Si el error se producerepetidamente, el hardwareestá averiado.
PS off
21-2 Error 2 mediciónde corriente U
Desplazamiento de lamedición de corriente 2 faseU demasiado grande.
Si el error se producerepetidamente, el hardwareestá averiado.
PS off
21-3 Error 2 mediciónde corriente V
Desplazamiento de lamedición de corriente 2 faseV demasiado grande.
Si el error se producerepetidamente, el hardwareestá averiado.
PS off
22-0 PROFIBUS: inic-ialización errónea
Inicialización errónea de la in-terfaz PROFIBUS. ¿interfazaveriada?
• Cambiar la interfaz. Si esnecesario, el equipopuede enviarse al fab-ricante para sureparación.
Con-figurab-le
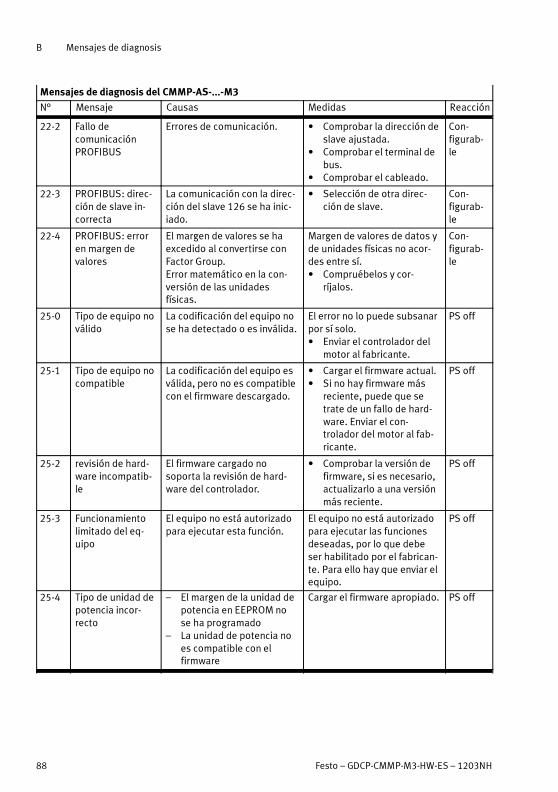
B Mensajes de diagnosis
88 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
22-2 Fallo decomunicaciónPROFIBUS
Errores de comunicación. • Comprobar la dirección deslave ajustada.
• Comprobar el terminal debus.
• Comprobar el cableado.
Con-figurab-le
22-3 PROFIBUS: direc-ción de slave in-correcta
La comunicación con la direc-ción del slave 126 se ha inic-iado.
• Selección de otra direc-ción de slave.
Con-figurab-le
22-4 PROFIBUS: erroren margen devalores
El margen de valores se haexcedido al convertirse conFactor Group.Error matemático en la con-versión de las unidadesfísicas.
Margen de valores de datos yde unidades físicas no acor-des entre sí.• Compruébelos y cor-
ríjalos.
Con-figurab-le
25-0 Tipo de equipo noválido
La codificación del equipo nose ha detectado o es inválida.
El error no lo puede subsanarpor sí solo.• Enviar el controlador del
motor al fabricante.
PS off
25-1 Tipo de equipo nocompatible
La codificación del equipo esválida, pero no es compatiblecon el firmware descargado.
• Cargar el firmware actual.• Si no hay firmware más
reciente, puede que setrate de un fallo de hard-ware. Enviar el con-trolador del motor al fab-ricante.
PS off
25-2 revisión de hard-ware incompatib-le
El firmware cargado nosoporta la revisión de hard-ware del controlador.
• Comprobar la versión defirmware, si es necesario,actualizarlo a una versiónmás reciente.
PS off
25-3 Funcionamientolimitado del eq-uipo
El equipo no está autorizadopara ejecutar esta función.
El equipo no está autorizadopara ejecutar las funcionesdeseadas, por lo que debeser habilitado por el fabrican-te. Para ello hay que enviar elequipo.
PS off
25-4 Tipo de unidad depotencia incor-recto
– El margen de la unidad depotencia en EEPROM nose ha programado
– La unidad de potencia noes compatible con elfirmware
Cargar el firmware apropiado. PS off
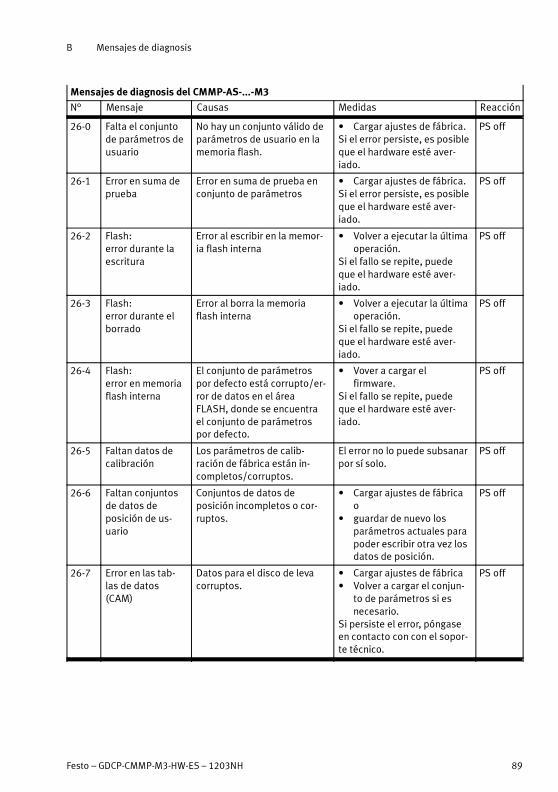
B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 89
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
26-0 Falta el conjuntode parámetros deusuario
No hay un conjunto válido deparámetros de usuario en lamemoria flash.
• Cargar ajustes de fábrica.Si el error persiste, es posibleque el hardware esté aver-iado.
PS off
26-1 Error en suma deprueba
Error en suma de prueba enconjunto de parámetros
• Cargar ajustes de fábrica.Si el error persiste, es posibleque el hardware esté aver-iado.
PS off
26-2 Flash:error durante laescritura
Error al escribir en la memor-ia flash interna
• Volver a ejecutar la últimaoperación.
Si el fallo se repite, puedeque el hardware esté aver-iado.
PS off
26-3 Flash:error durante elborrado
Error al borra la memoriaflash interna
• Volver a ejecutar la últimaoperación.
Si el fallo se repite, puedeque el hardware esté aver-iado.
PS off
26-4 Flash:error en memoriaflash interna
El conjunto de parámetrospor defecto está corrupto/er-ror de datos en el áreaFLASH, donde se encuentrael conjunto de parámetrospor defecto.
• Vover a cargar elfirmware.
Si el fallo se repite, puedeque el hardware esté aver-iado.
PS off
26-5 Faltan datos decalibración
Los parámetros de calib-ración de fábrica están in-completos/corruptos.
El error no lo puede subsanarpor sí solo.
PS off
26-6 Faltan conjuntosde datos deposición de us-uario
Conjuntos de datos deposición incompletos o cor-ruptos.
• Cargar ajustes de fábricao
• guardar de nuevo losparámetros actuales parapoder escribir otra vez losdatos de posición.
PS off
26-7 Error en las tab-las de datos(CAM)
Datos para el disco de levacorruptos.
• Cargar ajustes de fábrica• Volver a cargar el conjun-
to de parámetros si esnecesario.
Si persiste el error, póngaseen contacto con con el sopor-te técnico.
PS off
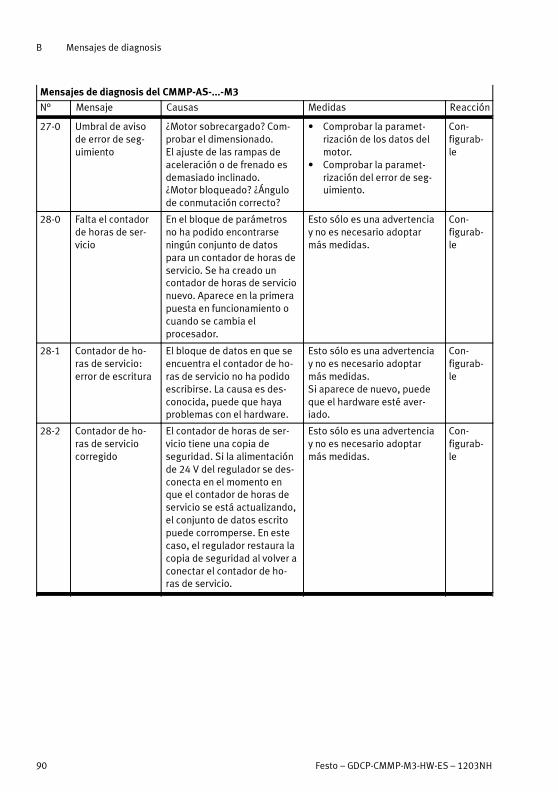
B Mensajes de diagnosis
90 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
27-0 Umbral de avisode error de seg-uimiento
¿Motor sobrecargado? Com-probar el dimensionado.El ajuste de las rampas deaceleración o de frenado esdemasiado inclinado.¿Motor bloqueado? ¿Ángulode conmutación correcto?
• Comprobar la paramet-rización de los datos delmotor.
• Comprobar la paramet-rización del error de seg-uimiento.
Con-figurab-le
28-0 Falta el contadorde horas de ser-vicio
En el bloque de parámetrosno ha podido encontrarseningún conjunto de datospara un contador de horas deservicio. Se ha creado uncontador de horas de servicionuevo. Aparece en la primerapuesta en funcionamiento ocuando se cambia elprocesador.
Esto sólo es una advertenciay no es necesario adoptarmás medidas.
Con-figurab-le
28-1 Contador de ho-ras de servicio:error de escritura
El bloque de datos en que seencuentra el contador de ho-ras de servicio no ha podidoescribirse. La causa es des-conocida, puede que hayaproblemas con el hardware.
Esto sólo es una advertenciay no es necesario adoptarmás medidas.Si aparece de nuevo, puedeque el hardware esté aver-iado.
Con-figurab-le
28-2 Contador de ho-ras de serviciocorregido
El contador de horas de ser-vicio tiene una copia deseguridad. Si la alimentaciónde 24 V del regulador se des-conecta en el momento enque el contador de horas deservicio se está actualizando,el conjunto de datos escritopuede corromperse. En estecaso, el regulador restaura lacopia de seguridad al volver aconectar el contador de ho-ras de servicio.
Esto sólo es una advertenciay no es necesario adoptarmás medidas.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 91
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
28-3 Contador de ho-ras de servicioconvertido
Se ha cargado un firmwarecuyo contador de horas deservicio tiene otro formato dedatos. El conjunto de datosantiguo del contador de ho-ras de servicio se convierte alformato nuevo en la primeraconexión.
Esto sólo es una advertenciay no es necesario adoptarmás medidas.
Con-figurab-le
29-0 La tarjeta MMC/SD no existe
Este error se activa cuandohay que ejecutar una acciónen la tarjeta de memoria (car-gar o crear un archivo DCO,descargar el firmware), perono hay ninguna tarjeta dememoria insertada.
Insertar una tarjeta dememoria apropiada en laranura.Solo cuando se desee ex-presamente.
Con-figurab-le
29-1 Tarjeta MMC/SD:error de inic-ialización
Este error se activa en los sig-uientes casos:– La tarjeta de memoria no
puede iniciarse. Es posib-le que el tipo de tarjeta nosea compatible.
– Sistema de archivos nocompatible
– Error en relación con laShared Memory
• Comprobar el tipo de tar-jeta utilizado.
• Conectar la tarjeta dememoria a un PC y for-matearla de nuevo.
Con-figurab-le
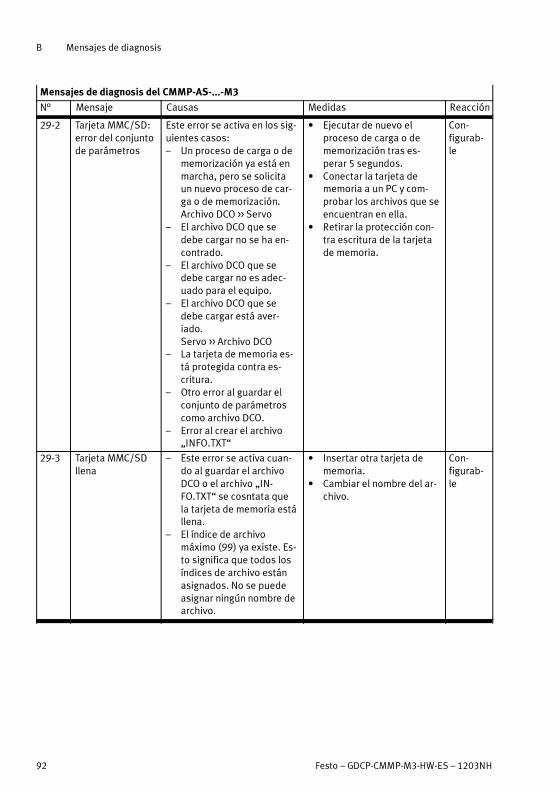
B Mensajes de diagnosis
92 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
29-2 Tarjeta MMC/SD:error del conjuntode parámetros
Este error se activa en los sig-uientes casos:– Un proceso de carga o de
memorización ya está enmarcha, pero se solicitaun nuevo proceso de car-ga o de memorización.Archivo DCO >> Servo
– El archivo DCO que sedebe cargar no se ha en-contrado.
– El archivo DCO que sedebe cargar no es adec-uado para el equipo.
– El archivo DCO que sedebe cargar está aver-iado.Servo >> Archivo DCO
– La tarjeta de memoria es-tá protegida contra es-critura.
– Otro error al guardar elconjunto de parámetroscomo archivo DCO.
– Error al crear el archivo„INFO.TXT“
• Ejecutar de nuevo elproceso de carga o dememorización tras es-perar 5 segundos.
• Conectar la tarjeta dememoria a un PC y com-probar los archivos que seencuentran en ella.
• Retirar la protección con-tra escritura de la tarjetade memoria.
Con-figurab-le
29-3 Tarjeta MMC/SDllena
– Este error se activa cuan-do al guardar el archivoDCO o el archivo „IN-FO.TXT“ se cosntata quela tarjeta de memoria estállena.
– El índice de archivomáximo (99) ya existe. Es-to significa que todos losíndices de archivo estánasignados. No se puedeasignar ningún nombre dearchivo.
• Insertar otra tarjeta dememoria.
• Cambiar el nombre del ar-chivo.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 93
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
29-4 Tarjeta MMC/SD:descarga defirmware
Este error se activa en los sig-uientes casos:– No hay archivo de
firmware en la tarjeta dememoria
– El archivo de firmwareque se debe cargar no esadecuado para el equipo.
– Otro error al descargar elfirmware, p. ej. error ensuma de prueba en unSRecord, error de flash,etc.
• Conectar la tarjeta dememoria al PC y copiar elarchivo de firmware.
Con-figurab-le
30-0 Error interno deconversión
Se ha sobrepasado el margencon factores de escalado in-ternos dependientes de lostiempos de ciclo deregulación parametrizados.
• Comprobar si se hanparametrizado tiemposde ciclo demasiado largoso demasiado cortos.
PS off
31-0 Motor It – ¿Motor bloqueado?– ¿Motor subdimen-
sionado?
• Comprobar el dimen-sionado de la potencia delconjunto de accionamien-to.
Con-figurab-le
31-1 ServorreguladorIt
La supervisión It se activacon frecuencia.– ¿Controlador del motor
subdimensionado?– ¿Mecánica dura?
• Comprobar la planificacóndel proyecto del con-trolador del motor,
• si es necesario, utilizar untipo más potente.
• Comprobar la mecánica.
Con-figurab-le
31-2 PFC It Excedida la medición depotencia del PFC.
• Parametrice el funcionam-iento sin PFC (FCT).
Con-figurab-le
31-3 Resistencia defrenado It
– Sobrecarga de la resisten-cia de frenado interna.
• Utilizar resistencia exter-na.
• Reducir valor de resisten-cia o utilizar resistenciacon carga de impulso ma-yor.
Con-figurab-le
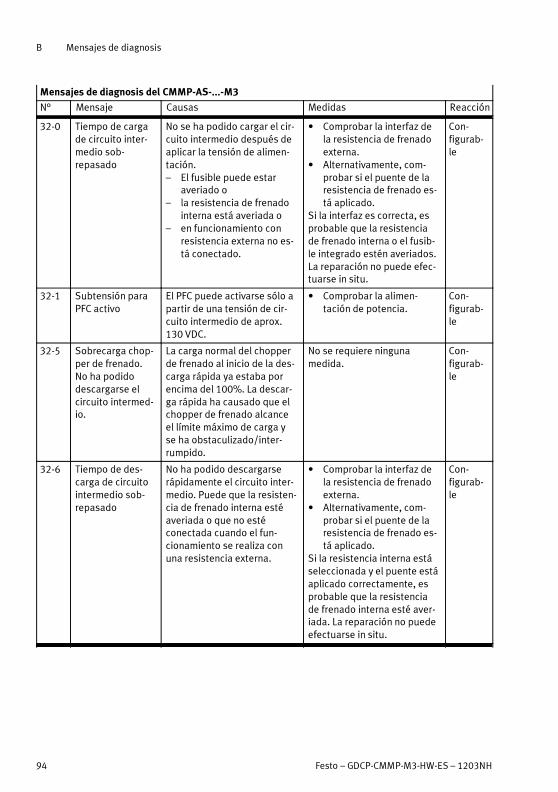
B Mensajes de diagnosis
94 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
32-0 Tiempo de cargade circuito inter-medio sob-repasado
No se ha podido cargar el cir-cuito intermedio después deaplicar la tensión de alimen-tación.– El fusible puede estar
averiado o– la resistencia de frenado
interna está averiada o– en funcionamiento con
resistencia externa no es-tá conectado.
• Comprobar la interfaz dela resistencia de frenadoexterna.
• Alternativamente, com-probar si el puente de laresistencia de frenado es-tá aplicado.
Si la interfaz es correcta, esprobable que la resistenciade frenado interna o el fusib-le integrado estén averiados.La reparación no puede efec-tuarse in situ.
Con-figurab-le
32-1 Subtensión paraPFC activo
El PFC puede activarse sólo apartir de una tensión de cir-cuito intermedio de aprox.130 VDC.
• Comprobar la alimen-tación de potencia.
Con-figurab-le
32-5 Sobrecarga chop-per de frenado.No ha podidodescargarse elcircuito intermed-io.
La carga normal del chopperde frenado al inicio de la des-carga rápida ya estaba porencima del 100%. La descar-ga rápida ha causado que elchopper de frenado alcanceel límite máximo de carga yse ha obstaculizado/inter-rumpido.
No se requiere ningunamedida.
Con-figurab-le
32-6 Tiempo de des-carga de circuitointermedio sob-repasado
No ha podido descargarserápidamente el circuito inter-medio. Puede que la resisten-cia de frenado interna estéaveriada o que no estéconectada cuando el fun-cionamiento se realiza conuna resistencia externa.
• Comprobar la interfaz dela resistencia de frenadoexterna.
• Alternativamente, com-probar si el puente de laresistencia de frenado es-tá aplicado.
Si la resistencia interna estáseleccionada y el puente estáaplicado correctamente, esprobable que la resistenciade frenado interna esté aver-iada. La reparación no puedeefectuarse in situ.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 95
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
32-7 No hay alimen-tación de poten-cia para desbloq-uear el regulador
La orden de desbloqueo delregulador se dio cuando elcircuito intermedio aún es-taba en la fase de carga, conla tensión de alimentaciónaplicada, y el relé de redtodavía no estaba conectado.El actuador no puede des-bloquearse en esta fase, yaque todavía no está conec-tado físicamente a la red (reléde red).
• En la aplicación, com-probar que la alimen-tación de la red y el des-bloqueo del regulador seefectúen consecutivamen-te con un breve intervaloentre sí.
Con-figurab-le
32-8 Fallo en la alimen-tación de poten-cia para desbloq-uear el regulador
Interrupciones/fallo de la redde la alimentación de poten-cia cuando el desbloqueo delregulador estaba activado.
• Comprobar la alimen-tación de potencia.
QStop
32-9 Fallo de fase Fallo en una o varias fases(sólo con alimentacióntrifásica).
• Comprobar la alimen-tación de potencia.
QStop
33-0 Error de seguim-iento de laemulación de en-coder
La frecuencia límite de laemulación de encoder se haexcedido (véase el manual) yel ángulo emulado en [X11]no ha podido seguir. Estopuede suceder cuando sehan programado un elevadonúmero de impulsos en [X11]y el actuador alcanzavelocidades altas.
• Comprobar si el númerode impulsos paramet-rizado es demasiado altopara la velocidad quedebe visualizarse.
• Si es necesario, reducir elnúmero de impulsos.
Con-figurab-le

B Mensajes de diagnosis
96 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
34-0 No hay sin-cronización através del bus decampo
El regulador no pudo sin-cronizarse con el bus de cam-po al activar el modo deposición interpolada.– Puede que los mensajes
de sincronización delmaster hubiesen fallado.
– Alternativamente, el inter-valo IPO no está ajustadocorrectamente al intervalode sincronización.
• Comprobar los ajustes delos tiempos de ciclo delregulador.
Con-figurab-le
34-1 Fallo de sin-cronización delbus de campo
– La sincronización a travésde los mensajes de bus decampo en el funcionam-iento en curso (modo deposición interpolada) hafallado.
– ¿Fallo de mensajes de sin-cronización del master?
– ¿Intervalo de sin-cronización (intervaloIPO) parametrizadodemasiado grande/peq-ueño?
• Comprobar los ajustes delos tiempos de ciclo delregulador.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 97
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
35-0 Protección an-tigiro del motorlineal
Perturbación de señales deltransmisor. El motor puedegirar más allá del tope por-que la posición de con-mutación se ha desplazadodebido a las perturbacionesen las señales del transmisor.
• Comprobar las recomen-daciones EMC en lainstalación.
• Controlar la distanciamecánica en los motoreslineales con transmisoresinductivos/ópticos concinta y cabezal demedición montados apar-te.
• En los motores linealescon transmisores induc-tivos, asegurarse de queel campo magnético delos imanes o deldevanado del motor no seextienda al cabezal demedición (este efecto seda sobre todo cuando hayaceleraciones elevadas =corriente del motor alta).
Con-figurab-le
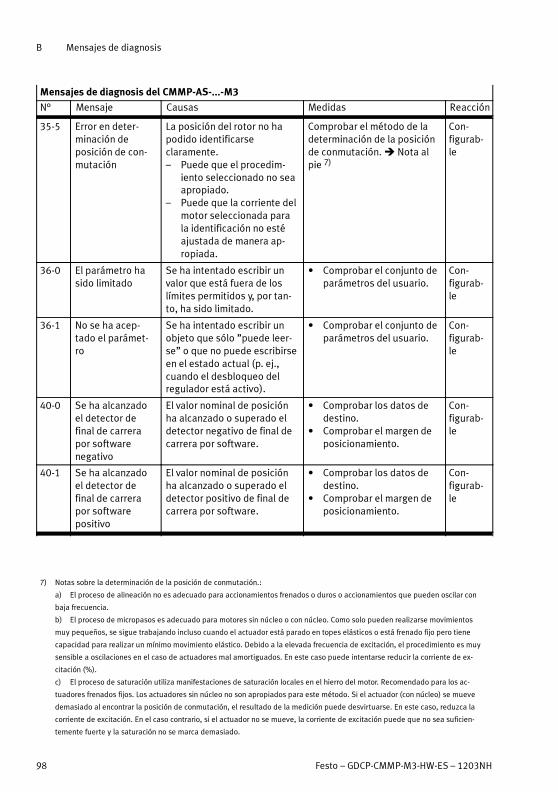
B Mensajes de diagnosis
98 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
35-5 Error en deter-minación deposición de con-mutación
La posición del rotor no hapodido identificarseclaramente.– Puede que el procedim-
iento seleccionado no seaapropiado.
– Puede que la corriente delmotor seleccionada parala identificación no estéajustada de manera ap-ropiada.
Comprobar el método de ladeterminación de la posiciónde conmutación. Nota alpie 7)
Con-figurab-le
36-0 El parámetro hasido limitado
Se ha intentado escribir unvalor que está fuera de loslímites permitidos y, por tan-to, ha sido limitado.
• Comprobar el conjunto deparámetros del usuario.
Con-figurab-le
36-1 No se ha acep-tado el parámet-ro
Se ha intentado escribir unobjeto que sólo ”puede leer-se” o que no puede escribirseen el estado actual (p. ej.,cuando el desbloqueo delregulador está activo).
• Comprobar el conjunto deparámetros del usuario.
Con-figurab-le
40-0 Se ha alcanzadoel detector definal de carrerapor softwarenegativo
El valor nominal de posiciónha alcanzado o superado eldetector negativo de final decarrera por software.
• Comprobar los datos dedestino.
• Comprobar el margen deposicionamiento.
Con-figurab-le
40-1 Se ha alcanzadoel detector definal de carrerapor softwarepositivo
El valor nominal de posiciónha alcanzado o superado eldetector positivo de final decarrera por software.
• Comprobar los datos dedestino.
• Comprobar el margen deposicionamiento.
Con-figurab-le
7) Notas sobre la determinación de la posición de conmutación.:
a) El proceso de alineación no es adecuado para accionamientos frenados o duros o accionamientos que pueden oscilar con
baja frecuencia.
b) El proceso de micropasos es adecuado para motores sin núcleo o con núcleo. Como solo pueden realizarse movimientos
muy pequeños, se sigue trabajando incluso cuando el actuador está parado en topes elásticos o está frenado fijo pero tiene
capacidad para realizar un mínimo movimiento elástico. Debido a la elevada frecuencia de excitación, el procedimiento es muy
sensible a oscilaciones en el caso de actuadores mal amortiguados. En este caso puede intentarse reducir la corriente de ex-
citación (%).
c) El proceso de saturación utiliza manifestaciones de saturación locales en el hierro del motor. Recomendado para los ac-
tuadores frenados fijos. Los actuadores sin núcleo no son apropiados para este método. Si el actuador (con núcleo) se mueve
demasiado al encontrar la posición de conmutación, el resultado de la medición puede desvirtuarse. En este caso, reduzca la
corriente de excitación. En el caso contrario, si el actuador no se mueve, la corriente de excitación puede que no sea suficien-
temente fuerte y la saturación no se marca demasiado.
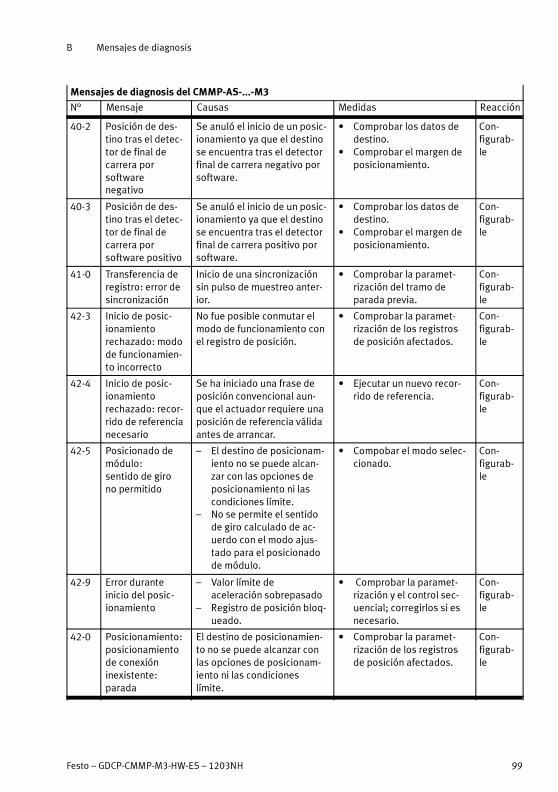
B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 99
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
40-2 Posición de des-tino tras el detec-tor de final decarrera porsoftwarenegativo
Se anuló el inicio de un posic-ionamiento ya que el destinose encuentra tras el detectorfinal de carrera negativo porsoftware.
• Comprobar los datos dedestino.
• Comprobar el margen deposicionamiento.
Con-figurab-le
40-3 Posición de des-tino tras el detec-tor de final decarrera porsoftware positivo
Se anuló el inicio de un posic-ionamiento ya que el destinose encuentra tras el detectorfinal de carrera positivo porsoftware.
• Comprobar los datos dedestino.
• Comprobar el margen deposicionamiento.
Con-figurab-le
41-0 Transferencia deregistro: error desincronización
Inicio de una sincronizaciónsin pulso de muestreo anter-ior.
• Comprobar la paramet-rización del tramo deparada previa.
Con-figurab-le
42-3 Inicio de posic-ionamientorechazado: modode funcionamien-to incorrecto
No fue posible conmutar elmodo de funcionamiento conel registro de posición.
• Comprobar la paramet-rización de los registrosde posición afectados.
Con-figurab-le
42-4 Inicio de posic-ionamientorechazado: recor-rido de referencianecesario
Se ha iniciado una frase deposición convencional aun-que el actuador requiere unaposición de referencia válidaantes de arrancar.
• Ejecutar un nuevo recor-rido de referencia.
Con-figurab-le
42-5 Posicionado demódulo:sentido de girono permitido
– El destino de posicionam-iento no se puede alcan-zar con las opciones deposicionamiento ni lascondiciones límite.
– No se permite el sentidode giro calculado de ac-uerdo con el modo ajus-tado para el posicionadode módulo.
• Compobar el modo selec-cionado.
Con-figurab-le
42-9 Error duranteinicio del posic-ionamiento
– Valor límite deaceleración sobrepasado
– Registro de posición bloq-ueado.
• Comprobar la paramet-rización y el control sec-uencial; corregirlos si esnecesario.
Con-figurab-le
42-0 Posicionamiento:posicionamientode conexióninexistente:parada
El destino de posicionamien-to no se puede alcanzar conlas opciones de posicionam-iento ni las condicioneslímite.
• Comprobar la paramet-rización de los registrosde posición afectados.
Con-figurab-le
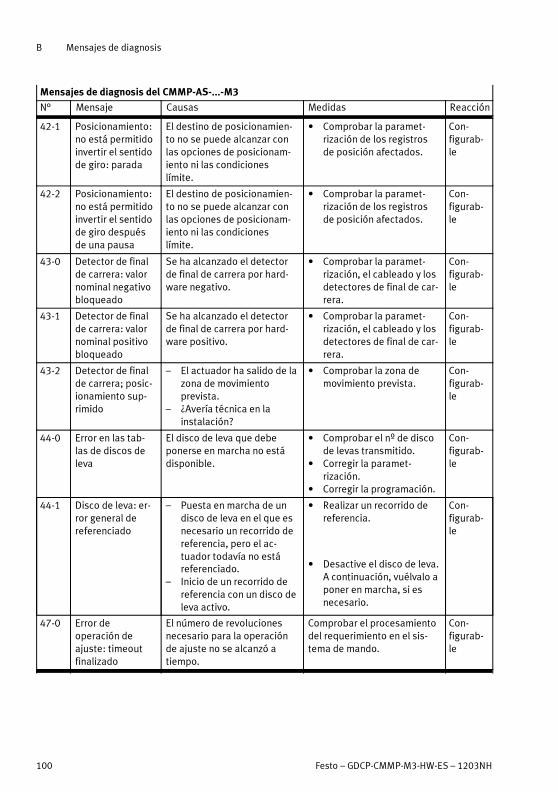
B Mensajes de diagnosis
100 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
42-1 Posicionamiento:no está permitidoinvertir el sentidode giro: parada
El destino de posicionamien-to no se puede alcanzar conlas opciones de posicionam-iento ni las condicioneslímite.
• Comprobar la paramet-rización de los registrosde posición afectados.
Con-figurab-le
42-2 Posicionamiento:no está permitidoinvertir el sentidode giro despuésde una pausa
El destino de posicionamien-to no se puede alcanzar conlas opciones de posicionam-iento ni las condicioneslímite.
• Comprobar la paramet-rización de los registrosde posición afectados.
Con-figurab-le
43-0 Detector de finalde carrera: valornominal negativobloqueado
Se ha alcanzado el detectorde final de carrera por hard-ware negativo.
• Comprobar la paramet-rización, el cableado y losdetectores de final de car-rera.
Con-figurab-le
43-1 Detector de finalde carrera: valornominal positivobloqueado
Se ha alcanzado el detectorde final de carrera por hard-ware positivo.
• Comprobar la paramet-rización, el cableado y losdetectores de final de car-rera.
Con-figurab-le
43-2 Detector de finalde carrera; posic-ionamiento sup-rimido
– El actuador ha salido de lazona de movimientoprevista.
– ¿Avería técnica en lainstalación?
• Comprobar la zona demovimiento prevista.
Con-figurab-le
44-0 Error en las tab-las de discos deleva
El disco de leva que debeponerse en marcha no estádisponible.
• Comprobar el nº de discode levas transmitido.
• Corregir la paramet-rización.
• Corregir la programación.
Con-figurab-le
44-1 Disco de leva: er-ror general dereferenciado
– Puesta en marcha de undisco de leva en el que esnecesario un recorrido dereferencia, pero el ac-tuador todavía no estáreferenciado.
– Inicio de un recorrido dereferencia con un disco deleva activo.
• Realizar un recorrido dereferencia.
Con-figurab-le
• Desactive el disco de leva.A continuación, vuélvalo aponer en marcha, si esnecesario.
47-0 Error deoperación deajuste: timeoutfinalizado
El número de revolucionesnecesario para la operaciónde ajuste no se alcanzó atiempo.
Comprobar el procesamientodel requerimiento en el sis-tema de mando.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 101
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
48-0 Recorrido dereferencianecesario
Se intenta conmutar al modode funcionamiento„regulación de la velocidad“o „regulación del par“ o con-ceder la habilitación delregulador en uno de estosmodos de funcionamientoaunque el actuador necesitepara ello una posición dereferencia válida.
• Realizar un recorrido dereferencia.
QStop
50-0 Demasiados PDOsincronizados
Hay más PDO activados quelos que pueden procesarseen el intervalo SYNC.Este mensaje aparece cuan-do sólo debe transmitirse sin-crónicamente un PDO perohay un gran número de PDOactivados con otro tipo detransmisión.
• Comprobar la activaciónde los PDO.
Si la configuración es aprop-iada, la advertencia puedesuprimirse con la gestión deerrores.• Prolongar el intervalo de
sincronización.
Con-figurab-le
50-1 Ha aparecido unerror de SDO
Un SDO-Transfer ha ocas-ionado un SDO-Abort.– Los datos superan el mar-
gen de valores– Acceso a un objeto que no
existe.
• Comprobar la orden en-viada.
Con-figurab-le
51-0 No hay ningúnmódulo deseguridad o esdesconocido
(El error no sepuede validar)
– No se ha detectado nin-gún módulo de seguridado un tipo de módulo des-conocido.
• Montar un módulo deseguridad o de microin-terruptores adecuadopara el firmware y el hard-ware.
• Cargar un módulo deseguridad o de microin-terruptores adecuadopara el firmware; com-párese la denominacióndel tipo en el módulo.
PS off
– Módulo interno de tensióndel módulo de seguridado del módulo de microin-terruptores.
• Probablemente el móduloesté averiado. Si es posib-le, cambiarlo por otromódulo.
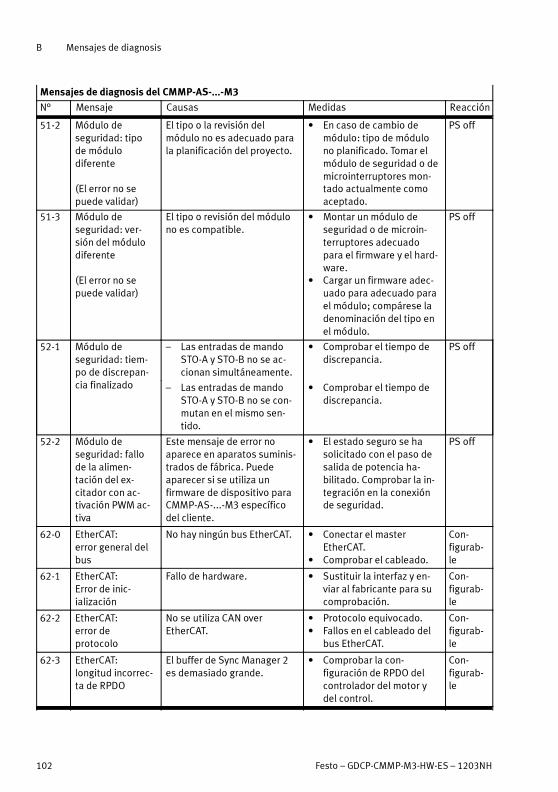
B Mensajes de diagnosis
102 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
51-2 Módulo deseguridad: tipode módulodiferente
(El error no sepuede validar)
El tipo o la revisión delmódulo no es adecuado parala planificación del proyecto.
• En caso de cambio demódulo: tipo de módulono planificado. Tomar elmódulo de seguridad o demicrointerruptores mon-tado actualmente comoaceptado.
PS off
51-3 Módulo deseguridad: ver-sión del módulodiferente
(El error no sepuede validar)
El tipo o revisión del módulono es compatible.
• Montar un módulo deseguridad o de microin-terruptores adecuadopara el firmware y el hard-ware.
• Cargar un firmware adec-uado para adecuado parael módulo; compárese ladenominación del tipo enel módulo.
PS off
52-1 Módulo deseguridad: tiem-po de discrepan-cia finalizado
– Las entradas de mandoSTO-A y STO-B no se ac-cionan simultáneamente.
• Comprobar el tiempo dediscrepancia.
PS off
– Las entradas de mandoSTO-A y STO-B no se con-mutan en el mismo sen-tido.
• Comprobar el tiempo dediscrepancia.
52-2 Módulo deseguridad: fallode la alimen-tación del ex-citador con ac-tivación PWM ac-tiva
Este mensaje de error noaparece en aparatos suminis-trados de fábrica. Puedeaparecer si se utiliza unfirmware de dispositivo paraCMMP-AS-...-M3 específicodel cliente.
• El estado seguro se hasolicitado con el paso desalida de potencia ha-bilitado. Comprobar la in-tegración en la conexiónde seguridad.
PS off
62-0 EtherCAT:error general delbus
No hay ningún bus EtherCAT. • Conectar el masterEtherCAT.
• Comprobar el cableado.
Con-figurab-le
62-1 EtherCAT:Error de inic-ialización
Fallo de hardware. • Sustituir la interfaz y en-viar al fabricante para sucomprobación.
Con-figurab-le
62-2 EtherCAT:error deprotocolo
No se utiliza CAN overEtherCAT.
• Protocolo equivocado.• Fallos en el cableado del
bus EtherCAT.
Con-figurab-le
62-3 EtherCAT:longitud incorrec-ta de RPDO
El buffer de Sync Manager 2es demasiado grande.
• Comprobar la con-figuración de RPDO delcontrolador del motor ydel control.
Con-figurab-le
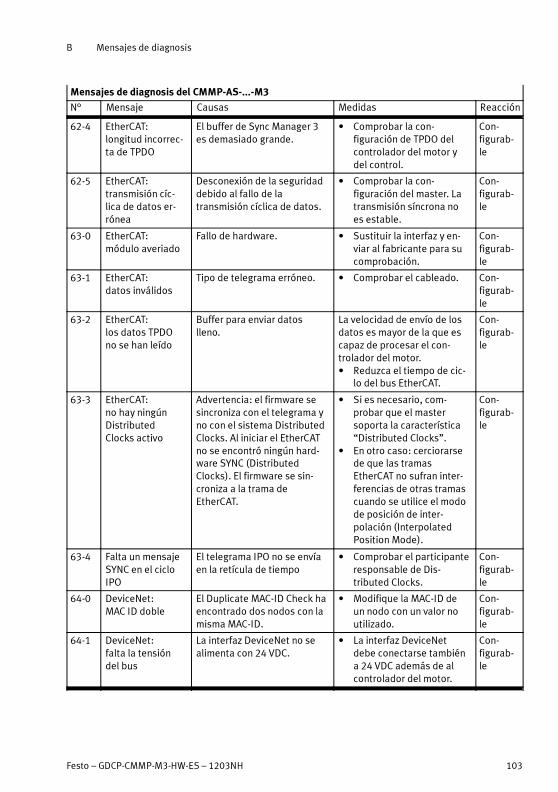
B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 103
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
62-4 EtherCAT:longitud incorrec-ta de TPDO
El buffer de Sync Manager 3es demasiado grande.
• Comprobar la con-figuración de TPDO delcontrolador del motor ydel control.
Con-figurab-le
62-5 EtherCAT:transmisión cíc-lica de datos er-rónea
Desconexión de la seguridaddebido al fallo de latransmisión cíclica de datos.
• Comprobar la con-figuración del master. Latransmisión síncrona noes estable.
Con-figurab-le
63-0 EtherCAT:módulo averiado
Fallo de hardware. • Sustituir la interfaz y en-viar al fabricante para sucomprobación.
Con-figurab-le
63-1 EtherCAT:datos inválidos
Tipo de telegrama erróneo. • Comprobar el cableado. Con-figurab-le
63-2 EtherCAT:los datos TPDOno se han leído
Buffer para enviar datoslleno.
La velocidad de envío de losdatos es mayor de la que escapaz de procesar el con-trolador del motor.• Reduzca el tiempo de cic-
lo del bus EtherCAT.
Con-figurab-le
63-3 EtherCAT:no hay ningúnDistributedClocks activo
Advertencia: el firmware sesincroniza con el telegrama yno con el sistema DistributedClocks. Al iniciar el EtherCATno se encontró ningún hard-ware SYNC (DistributedClocks). El firmware se sin-croniza a la trama deEtherCAT.
• Si es necesario, com-probar que el mastersoporta la característica“Distributed Clocks”.
• En otro caso: cerciorarsede que las tramasEtherCAT no sufran inter-ferencias de otras tramascuando se utilice el modode posición de inter-polación (InterpolatedPosition Mode).
Con-figurab-le
63-4 Falta un mensajeSYNC en el cicloIPO
El telegrama IPO no se envíaen la retícula de tiempo
• Comprobar el participanteresponsable de Dis-tributed Clocks.
Con-figurab-le
64-0 DeviceNet:MAC ID doble
El Duplicate MAC-ID Check haencontrado dos nodos con lamisma MAC-ID.
• Modifique la MAC-ID deun nodo con un valor noutilizado.
Con-figurab-le
64-1 DeviceNet:falta la tensióndel bus
La interfaz DeviceNet no sealimenta con 24 VDC.
• La interfaz DeviceNetdebe conectarse tambiéna 24 VDC además de alcontrolador del motor.
Con-figurab-le

B Mensajes de diagnosis
104 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
64-2 DeviceNet:buffer de recep-ción desbordado
Demasiados mensajesrecibidos en poco tiempo.
• Reducir la frecuencia deexploración.
Con-figurab-le
64-3 DeviceNet:buffer de envíodesbordado
No hay espacio suficiente enel bus CAN para enviar men-sajes.
• aumentar la velocidad detransmisión
• reducir el número denodos
• reducir la frecuencia deexploración.
Con-figurab-le
64-4 DeviceNet:mensaje I/O noenviado
Error al enviar datos I/O. Cerciorarse de que la red estáconectada correctamente yno hay interferencias.
Con-figurab-le
64-5 DeviceNet:Bus Off
El regulador CAN es BUS OFF. Cerciorarse de que la red estáconectada correctamente yno hay interferencias.
Con-figurab-le
64-6 DeviceNet:el controladorCAN indica des-bordamiento
Hay un rebose en elregulador CAN.
• aumentar la velocidad detransmisión
• reducir el número denodos
• reducir la frecuencia deexploración.
Con-figurab-le
65-0 Active DeviceNet,pero ningúnmódulo
La comunicación DeviceNetestá activada en el conjuntode parámetros del con-trolador de motor, pero nohay ninguna interfaz dis-ponible.
• Desactive lacomunicación DeviceNet
• conectar una interfaz.
Con-figurab-le
65-1 Timeout de laconexión I/O
Interrupción de una conexiónI/O
Dentro del tiempo esperadono se ha recibido ningúnmensaje I/O.
Con-figurab-le
70-1 FHPP:error matemático
Desbordamiento/subdesbor-damiento o división entrecero durante el cálculo dedatos cíclicos.
• Comprobar los datos cilín-dricos
• Comprobar el FactorGroup.
Con-figurab-le
70-2 FHPP:Factor Groupinadmisible
El cálculo del Factor Group davalores no válidos.
Comprobar el Factor Group. Con-figurab-le
70-3 FHPP:cambio inad-misible de modode funcionamien-to
El cambio del modo de fun-cionamiento actual al mododeseado no está permitido.
Comprobar la aplicación. Esposible que no todos loscambios estén permitidos.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 105
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
71-1 FHPP:telegrama derecepción in-válido
El control no transmite datossuficientes (longitud de datosdemasiado corta).
• Comprobar la longitud delos datos parametrizadosen el control para el teleg-rama de recepción delcontrolador
• Comprobar la longitud delos datos configurados enel editor FHPP+ de FCT.
Con-figurab-le
71-2 FHPP:telegrama inad-misible de res-puesta
El CMMP-AS-...-M3 debetransmitir demasiados datosal control (longitud de datosdemasiado larga).
• Comprobar la longitud delos datos parametrizadosen el control para el teleg-rama de recepción delcontrolador
• Comprobar la longitud delos datos configurados enel editor FHPP+ de FCT.
Con-figurab-le
80-0 Desbordamientode regulador decorriente, IRQ
No se ha podido calcular losdatos de proceso en el ciclode interpolación/posición/velocidad/corriente ajustado.
Contactar con el soporte téc-nico.
PS off
80-1 Desbordamientode regulador delnúmero derevoluciones, IRQ
No se ha podido calcular losdatos de proceso en el ciclode interpolación/posición/velocidad/corriente ajustado.
Contactar con el soporte téc-nico.
PS off
80-2 Desbordamientode controlador deposición, IRQ
No se ha podido calcular losdatos de proceso en el ciclode interpolación/posición/velocidad/corriente ajustado.
Contactar con el soporte téc-nico.
PS off
80-3 Desbordamientode interpolador,IRQ
No se ha podido calcular losdatos de proceso en el ciclode interpolación/posición/velocidad/corriente ajustado.
Contactar con el soporte téc-nico.
PS off

B Mensajes de diagnosis
106 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
81-4 Desbordamientode Low-Level, IRQ
No se ha podido calcular losdatos de proceso en el ciclode interpolación/posición/velocidad/corriente ajustado.
Contactar con el soporte téc-nico.
PS off
81-5 Desbordamientode MDC de IRQ
No se ha podido calcular losdatos de proceso en el ciclode interpolación/posición/velocidad/corriente ajustado.
Contactar con el soporte téc-nico.
PS off
82-0 Control secuen-cial
Desbordamiento de IRQ4 (10ms Low-Level IRQ).
Control secuencial interno: elproceso se ha interrumpido.Sólo información - No se req-uieren medidas.
Con-figurab-le
82-1 Acceso de es-critura KO inic-iado varias veces
Se utilizan parámetros enfuncionamiento cíclico y acíc-lico concurrentemente.
Solo está permitido una inter-faz de parámetro (USB oEthernet)
Con-figurab-le
83-0 Módulo opcionalno válido
– La interfaz insertada no sereconoce.
– Firmware cargado des-conocido.
– Puede que haya una inter-faz compatible en laposición de enchufe eq-uivocada (p.ej., SERCOS2, EtherCAT).
• Comprobar en el firmwaresi la interfaz es compatib-le. En caso afirmativo,
• comprobar si la interfazestá insertada correc-tamente en la posiciónadecuada.
• Cambiar la interfaz y/o elfirmware.
Con-figurab-le
83-1 Módulo opcionalno compatible
La interfaz insertada se hadetectado pero no es com-patible con el firmware car-gado.
• Comprobar en el firmwaresi la interfaz es compatib-le.
• Si es necesario, sustituirel firmware.
Con-figurab-le

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 107
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
83-2 Módulo opcional:revisión de hard-ware incompatib-le
La interfaz insertada se hadetectado y también es com-patible. Sin embargo, la ver-sión de hardware no es com-patible (porque es demas-iado antigua).Un ejemplo son las interfacesPROFIBUS y EA88,producidas en una primeraversión 5V (versión 1.0), peroque no funcionan en el con-trolador del motor actual.
Es necesario cambiar la inter-faz. Contactar con el soportetécnico en caso necesario. Encaso de interfaz dePROFIBUS o de EA88 con ver-sión de hardware 2.0 o super-ior.
Con-figurab-le
84-0 No se cumplenlas condicionespara la ha-bilitación delregulador
No se cumplen una o variascondiciones para la ha-bilitación del regulador. Entreellas, las siguientes:– DIN4 (habilitación de
paso de salida) desconec-tada
– DIN5 (habilitación deregulador) desconectada
– Aún no se ha cargado elcircuito intermedio
– El transmisor todavía noestá listo para funcionar
– La identificación deltransductor angulartodavía está activa
– La identificaciónautomática del reguladorde corriente todavía estáactiva
– Los datos del transmisorno son válidos
– Cambio de estado de lafunción de seguridadtodavía no finalizado
– Descarga de firmware oDCO a través de Ethernet(TFTP) activa
– Descarga de DCO a tarjetade memoria todavía ac-tiva
– Descarga de firmware através de Ethernet activa
• Comprobar el estado delas entradas digitales
• Comprobar los cables delencoder
• Esperar identificacónautomática
• Esperar a que termine ladescarga del firmware oDCO
Warn

B Mensajes de diagnosis
108 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
90-0 Componente dehardware no dis-ponible (SRAM)
SRAM externa no detectada/insuficiente.
Fallo de hardware (com-ponente SRAM o tarjeta aver-iadas).
PS off
90-2 Error durante lacarga de FPGA
No puede cargarse el FPGA.El FPGA se carga serialmentedespués de iniciar el equipo,pero en esta ocasión no hapodido cargarse con datos oha señalado un error suma deprueba.
Volver a conectar el equipo(24 V). Si el fallo se repite, elhardware está averiado.
PS off
90-3 Error duranteinicio de SD-ADU
Las SD-ADU no pueden inic-iarse. Una o varias SD-ADUno emiten datos seriales.
Volver a conectar el equipo(24 V). Si el fallo se repite, elhardware está averiado.
PS off
90-4 Error de sin-cronización deSD-ADU tras inic-io
SD-ADU no sincrónica tras elinicio. Durante el servicio, lasSD-ADU para las señales delresolver siguen funcionandosincrónicamente una vez inic-iadas sincrónicamente. En lafase de inicio no ha sidoposible iniciar las SD-ADUsimultáneamente.
Volver a conectar el equipo(24 V). Si el fallo se repite, elhardware está averiado.
PS off
90-5 SD-ADU no sin-crónica
SD-ADU no sincrónica tras elinicio. Durante el servicio, lasSD-ADU para las señales delresolver siguen funcionandosincrónicamente una vez inic-iadas sincrónicamente. Estose comprueba continuamen-te durante el funcionamientoy, dado el caso, se ha ac-tivado un fallo.
Teóricamente, este efectotambién podría ser causadopor un acoplamiento EMCmasivo. Volver a conectar elequipo (24 V). Si el fallo serepite, el hardware está aver-iado (con gran probabilidad,una de las tres SD-ADU).
PS off
90-6 IRQ0 (reguladorde corriente): er-ror de iniciador
El paso de salida no inicia laIRQ de software que manejael regulador de corriente. Congran probabilidad hay un fal-lo de hardware en la tarjeta oen el procesador.
Volver a conectar el equipo(24 V). Si el fallo se repite, elhardware está averiado.
PS off

B Mensajes de diagnosis
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 109
Mensajes de diagnosis del CMMP-AS-...-M3
N° ReacciónMedidasCausasMensaje
90-9 Firmware deDEBUG(depuración) car-gado
Una de las versiones dedesarrollo compiladas para eldepurador se ha cargado nor-malmente.
Comprobar la versión defirmware. Actualizarlo si esnecesario.
PS off
91-0 Fallo interno deinicialización
SRAM interna demasiadopequeña para el firmwarecompilado. Solo puedeaparecer en versiones endesarrollo.
Comprobar la versión defirmware. Actualizarlo si esnecesario.
PS off
91-1 Error de memoriaal copiar
Los componentes delfirmware no se han copiadocorrectamente de la memoriaflash externa a la memoriaRAM interna durante el arran-que.
Volver a conectar el equipo(24 V). Si el error persiste,comprobar la versión defirmware y Actualizarlo si esnecesario.
PS off
91-2 Error al leer lacodificación delcontrolador/potencia
La ID-EEPROM en el con-trolador o en la unidad depotencia no se ha podido ac-tivar o no tiene datos consis-tentes.
Volver a conectar el equipo(24 V). Si el fallo se repite, elhardware está averiado. Noes posible repararlo.
PS off
91-3 Error de inic-ialización delsoftware
Uno de los siguientes com-ponentes falta o no se hapodido iniciar:a) No hay Shared Memory o
está defectuosab) No hay biblioteca de con-
trolador o está defec-tuosa
Comprobar la versión delsoftware y actualizarlo si esnecesario
PS off
Tab. B.2 Mensajes de diagnosis CMMP-AS-...-M3

B Mensajes de diagnosis
110 Festo – GDCP-CMMP-M3-HW-ES – 1203NH
Indicaciones sobre las medidas para los mensajes de error 08-2 … 08-7Medida Indicaciones
• Comprobar
si las
señales del
transmisor
están per-
turbadas.
– Comprobar el cableado, p. ej., ¿una o varias fases de las señales de pista inter-
rumpidas o cortocircuitadas?
– Comprobar las recomendaciones EMC en la instalación (¿apantallado del cable
en ambos lados?).
– Solo en transmisores incrementales:
En señales TTL single ended (las señales HALL siempre son señales TTL single
ended): comprobar si aparece una caída de tensión demasiado elevada en el
cable GND; en este caso = referencia de señal.
Comprobar si aparece una caída de tensión demasiado elevada en el cable GND;
en este caso = referencia de señal.
– Comprobar el nivel de la tensión de alimentación en el transmisor. ¿Es suficien-
te? Si no lo es, adapte la sección de los cables (conecte los cables utilizados en
paralelo) o utilice la retroalimentación de tensión (SENSE+ y SENSE-).
• Probar con
otros
transmisor
es.
– Si el fallo sigue apareciendo con la configuración correcta, realizar la prueba con
otro transmisor (sin fallos; cambiar también el cable de conexión). Si el fallo
sigue apareciendo, hay una avería en el controlador del motor. El equipo debe
ser reparado por el fabricante.
Tab. B.3 Indicaciones sobre los mensajes de error 08-2 … 08-7

CMMP-AS-...-M3
Festo – GDCP-CMMP-M3-HW-ES – 1203NH 111
Índice
AAcoplamiento del circuito intermedio 39. . . . . . .
Asignación de conectores enchufables 24. . . . . .
B
Bus CAN [X4] 64. . . . . . . . . . . . . . . . . . . . . . . . . .
C
Comprobación de disponibilidad para
funcionar 48. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Conexión de la alimentación de corriente 48. . . .
Conexión del encoder [X2B] 63. . . . . . . . . . . . . . .
Conexión del PC 48. . . . . . . . . . . . . . . . . . . . . . . .
Conexión del resolver [X2A] 62. . . . . . . . . . . . . . .
Conexión: bus CAN [X4] 34. . . . . . . . . . . . . . . . . .
Conexión: comunicación I/O [X1] 28. . . . . . . . . . .
Conexión: encoder [X2B] 31. . . . . . . . . . . . . . . . .
Conexión: entrada de encoder
incremental [X10] 40. . . . . . . . . . . . . . . . . . . . .
Conexión: fuente de alimentación [X9] 37. . . . . .
Conexión: motor [X6] 35. . . . . . . . . . . . . . . . . . . .
Conexión: resolver [X2A] 30. . . . . . . . . . . . . . . . .
Conexión: salida de encoder incremental [X11] 41
Control de sobrecorriente y cortocircuitos 50. . .
DDistancia para el montaje 23. . . . . . . . . . . . . . . .
EElementos de mando e indicación 52. . . . . . . . . .
Emisión de interferencias 42. . . . . . . . . . . . . . . . .
Espacio para el montaje 23. . . . . . . . . . . . . . . . . .
Espacios para el montaje 18. . . . . . . . . . . . . . . . .
Especificaciones técnicas 55. . . . . . . . . . . . . . . .
FFunciones de servicio y mensajes
de diagnosis 50. . . . . . . . . . . . . . . . . . . . . . . . .
G
Generalidades acerca de la EMC 42. . . . . . . . . . .
I
Identificación del producto 6. . . . . . . . . . . . . . . .
Instalación eléctrica 24. . . . . . . . . . . . . . . . . . . . .
Instalación mecánica 18. . . . . . . . . . . . . . . . . . . .
Instrucciones para una instalación segura
y conforme a la EMC 42. . . . . . . . . . . . . . . . . . .
Interfaces de comunicación 61. . . . . . . . . . . . . . .
Interfaz I/O [X1] 61. . . . . . . . . . . . . . . . . . . . . . . .
NNotas, Informaciones generales 8. . . . . . . . . . . .
PPFC 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Placa de características 6. . . . . . . . . . . . . . . . . . .
Protección EDS 44. . . . . . . . . . . . . . . . . . . . . . . . .
Puesta a punto 45. . . . . . . . . . . . . . . . . . . . . . . . .
RResistencia a interferencias 42. . . . . . . . . . . . . . .
SSistema completo del CMMP-AS 11. . . . . . . . . . .
UUso previsto 9. . . . . . . . . . . . . . . . . . . . . . . . . . . .
V
Vista del aparato 13. . . . . . . . . . . . . . . . . . . . . . .

Sin nuestra expresa autorización, queda terminantemente prohibidala reproducción total o parcial de este documento, así como su usoindebido y/o exhibición o comunicación a terceros. De los infractoresse exigirá el correspondiente resarcimiento de daños y perjuicios.Quedan reservados todos los derechos inherentes, en especial los depatentes, de modelos registrados y estéticos.
Copyright:Festo AG & Co. KGPostfachD-73726 Esslingen
Phone:+49 711 347 0
Fax:+49 711 347 2144
e-mail:[email protected]
Internet:www.festo.com
Original: deVersion: 1203NH








![Controlador de motor CMMP-AS--M0 - festo.com · PDF file6.7 Funcionesadicionales 59 ... [X6]y[X9]. ... posicionamiento Cap.6.1.2 25 ss Busdecampo Segúnelperfildelbusde campo –FHPP](https://static.fdocuments.ec/doc/165x107/5a78677d7f8b9a77438c705e/controlador-de-motor-cmmp-as-m0-festocom-67-funcionesadicionales-59.jpg)









