EtherCAT para controlador del motor CMMP−AS · Contenido y medidas generales de seguridad II...
127
Descripción EtherCAT CMMP−AS Descripción 570 925 es 0912NH [749 129] EtherCAT para controlador del motor CMMP−AS
Transcript of EtherCAT para controlador del motor CMMP−AS · Contenido y medidas generales de seguridad II...

Descripción
EtherCATCMMP−AS
Descripción570 925es 0912NH [749 129]
EtherCAT para controlador del motor CMMP−AS


Contenido y medidas generales de seguridad
I
Original es. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Edición es 0912NH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Denominación P.BE−CMMX−EC−SW−ES. . . . . . . . . . . . . . . . . .
Nº de art. 570 925. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
© Festo SE�&�Co. KG, D�73726 Esslingen, Alemania, 2009 Internet: http://www.festo.comE−mail: [email protected]
Sin nuestra expresa autorización, queda terminante� mente prohibida la reproducción total o parcial de este documento, así como su uso indebido y/o su exhibición o comunicación a terceros. El incumplimiento de lo anterior obliga a pagar de indemnización por daños y perjuicios. Reservados todos los derechos inherentes, en especial los de patentes, de modelos de utilidad industrial y esté� ticos.
Festo P.BE−CMMX−EC−SW−E S es 0912NH

Contenido y medidas generales de seguridad
II Festo P.BE−CMMX−EC−SW−E S es 0912NH
Adobe y Reader son marcas o marcas registradas de AdobeSystems Incorporated en los EE.UU. y/o en otros países.
Beckhoff y EtherCAT son marcas registradas de los propieta�rios respectivos en determinados países.

Contenido y medidas generales de seguridad
IIIFesto P.BE−CMMX−EC−SW−E S es 0912NH
Índice
Uso previsto III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Medidas de seguridad IV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Destinatarios V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Asistencia técnica V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Dotación del suministro V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Instrucciones importantes para el usuario VI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Documentación sobre el controlador del motor CMMP−AS VIII . . . . . . . . . . . . . . . . . . . . . Información sobre la versión IX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Términos y abreviaciones X . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1. Medidas de seguridad para actuadores eléctricos y controladores 1−1 . . . . .
1.1 Indicaciones generales 1−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Peligros derivados de la utilización incorrecta 1−6 . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Medidas de seguridad 1−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Medidas generales de seguridad 1−7 . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Medidas de seguridad para el montaje y el mantenimiento 1−10 . . . . . .
1.3.3 Protección para evitar el contacto con componentes electrónicos 1−13
1.3.4 Protección PELV contra descarga eléctrica 1−15 . . . . . . . . . . . . . . . . . . .
1.3.5 Protección contra movimientos peligrosos 1−16 . . . . . . . . . . . . . . . . . . .
1.3.6 Protección para evitar el contacto con piezas calientes 1−17 . . . . . . . . .
1.3.7 Protección durante la manipulación y el montaje 1−18 . . . . . . . . . . . . . .
2. Resumen 2−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 CANopen 2−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 EtherCAT 2−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Protocolo EtherCAT 2−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Interface EtherCAT CAMC−EC 2−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Archivo de descripción XML 2−13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3. Montaje 3−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Montaje de la interface EtherCAT en el controlador 3−3 . . . . . . . . . . . . . . . . . . . .

Contenido y medidas generales de seguridad
IV Festo P.BE−CMMX−EC−SW−E S es 0912NH
4. Instalación 4−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Asignación de clavijas y especificaciones de cables 4−3 . . . . . . . . . . . . . . . . . . .
4.1.1 Modelos de conectores enchufables X1 y X2 4−3 . . . . . . . . . . . . . . . . .
4.1.2 Asignación de los conectores enchufables X1 y X2 4−3 . . . . . . . . . . . . .
4.1.3 Tipo y modelos de cable 4−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.4 Asignación de pines en X1 y X2 4−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.5 Terminación de bus 4−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5. CANopen over EtherCAT (CoE) 5−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Interface de comunicación CANopen 5−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Configuración de la interface de comunicación 5−4 . . . . . . . . . . . . . . . .
5.1.2 Objetos de comunicación CANopen nuevos y modificados
en CoE 5−8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.3 Objetos de comunicación CANopen no soportados en CoE 5−20 . . . . . .
5.2 Perfil FHPP 5−22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Máquina de estado de comunicación 5−27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Diferencias entre las máquinas de estado de CANopen y EtherCAT 5−30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Trama SDO 5−31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Trama PDO 5−33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Control de errores 5−36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7 Trama de emergencia 5−37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.8 Adaptación del archivo de descripción de equipos XML 5−38 . . . . . . . . . . . . . . . .
5.8.1 Estructura básica del archivo de descripción de equipos 5−39 . . . . . . . .
5.8.2 Configuración de PDO de recepción en el nodo RxPDO 5−41 . . . . . . . . .
5.8.3 Configuración del PDO de transmisión en el nodo TxPDO 5−43 . . . . . . .
5.8.4 Órdenes de inicialización a través del nodo �Mailbox" 5−44 . . . . . . . . . .
5.9 Sincronización (Distributed Clocks) 5−46 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contenido y medidas generales de seguridad
VFesto P.BE−CMMX−EC−SW−E S es 0912NH
6. Puesta en funcionamiento 6−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Introducción 6−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Requisitos previos 6−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Nota importante 6−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4 Paso a paso 6−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.1 Configuración con FCT 6−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Configuración en un PLC de Beckhoff 6−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.1 Configuración de los datos de proceso 6−13 . . . . . . . . . . . . . . . . . . . . . .
7. Funciones de servicio técnico y mensajes de fallo 7−1 . . . . . . . . . . . . . . . . . . .
7.1 Mensajes de modo de funcionamiento y de fallo 7−3 . . . . . . . . . . . . . . . . . . . . . .
7.1.1 Mensajes de error 7−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A. Apéndice técnico A−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas A−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Contenido y medidas generales de seguridad
VI Festo P.BE−CMMX−EC−SW−E S es 0912NH

Contenido y medidas generales de seguridad
VIIFesto P.BE−CMMX−EC−SW−E S es 0912NH
Uso previsto
El presente manual sirve para trabajar de forma segura con elsistema de bus de campo EtherCAT para el controlador delmotor CMMP−AS y debe utilizarse solamente conjuntamentecon el manual del producto P.BE−CMMP−AS...
El controlador del motor CMMP−AS y los módulos y cablesque pueden conectarse sólo deben utilizarse como sigue:
� Conforme a lo previsto.
� Sólo para uso industrial.
� En perfectas condiciones técnicas.
� En su estado original y sin modificaciones no autorizadas(se permiten las conversiones o modificaciones descritasen la documentación suministrada con este producto).
· Observe las medidas de seguridad y el uso conforme a loprevisto que se incluyen en la documentación de todoslos subconjuntos y módulos.
· Observe las normativas especificadas, así como los regla�mentos de los organismos profesionales, las TÜV (regla�mentaciones técnicas), las disposiciones de la VDE y lasnormas nacionales imperantes.
· Observe los valores límite de todos los componentes adi�cionales (p. ej., sensores, actuadores).

Contenido y medidas generales de seguridad
VIII Festo P.BE−CMMX−EC−SW−E S es 0912NH
Medidas de seguridad
Para poner en funcionamiento y programar sistemas de posi�cionamiento, es obligatorio observar el reglamento de seguri�dad indicado en esta descripción, así como el indicado en lasinstrucciones de utilización de los demás componentes utili�zados.
El usuario debe asegurarse de que no haya nadie en la zonade influencia de los actuadores conectados ni del sistema deejes. El acceso a las zonas de posible peligro debe impedirsecon medidas adecuadas, tales como cierres e indicaciones deadvertencia.
AdvertenciaLos ejes eléctricos se mueven con fuerzas elevadas y aaltas velocidades. Las colisiones pueden causar lesionesgraves a las personas y daños materiales.
· Asegúrese de que nadie pueda acceder a la zona deinfluencia de los ejes ni a otros actuadores conectados yde que no haya objetos en el margen de posiciona�miento mientras el sistema está conectado a fuentes deenergía.
AdvertenciaLos fallos en la parametrización pueden causar lesiones alas personas o daños a los equipos.
· Desbloquee el regulador sólo cuando el sistema de ejesesté correctamente instalado y parametrizado.
Contenido y medidas generales de seguridad
IXFesto P.BE−CMMX−EC−SW−E S es 0912NH
Destinatarios
Esta descripción está destinada exclusivamente a especialis�tas formados en tecnología de automatización y control, conexperiencia en instalación, puesta en funcionamiento, progra�mación y diagnosis de sistemas de posicionamiento.
Asistencia técnica
Ante cualquier problema técnico, diríjase a su servicio localde asistencia técnica de Festo o escriba a la dirección de co�rreo siguiente:
Dotación del suministro
El master configura todos los slaves mediante un archivo XML(�EtherCAT Device Description"). Este archivo XML puede descargarse en Internet en: www.festo.com.

Contenido y medidas generales de seguridad
X Festo P.BE−CMMX−EC−SW−E S es 0912NH
Instrucciones importantes para el usuario
Categorías de riesgo
Esta descripción contiene indicaciones sobre los posiblespeligros que pueden derivarse de un uso indebido del pro�ducto. Estas indicaciones vienen precedidas de un título (Advertencia, Precaución, etc.) e impresas sobre un recuadrogris y señaladas mediante un pictograma. Las indicaciones depeligro pueden ser:
Advertencia... Si no se respeta esta indicación, pueden producirsedaños personales o materiales graves.
Precaución... Si no se respeta esta indicación, pueden producirsedaños personales o materiales.
Importante... Si no se respeta esta indicación, pueden producirsedaños materiales.
Elementos sensibles a las descargas electrostáticas: estoscomponentes pueden dañarse si no se manejan correcta�mente.

Contenido y medidas generales de seguridad
XIFesto P.BE−CMMX−EC−SW−E S es 0912NH
Señalización de la información especial
Los siguientes pictogramas señalan los párrafos quecontienen información especial.
Pictogramas
Información:recomendaciones, sugerencias y referencias a otras fuentesde información.
Accesorios:indicaciones sobre accesorios necesarios o útiles.
Medio ambiente:información sobre el uso respetuoso con el medio ambientede los productos de Festo.
Identificadores de texto
· El punto de listado señala aquellas actividades que pue�den realizarse en cualquier orden.
1. Las cifras señalan aquellas actividades que es precisorealizar siguiendo el orden indicado.
� Los guiones señalan las enumeraciones generales.

Contenido y medidas generales de seguridad
XII Festo P.BE−CMMX−EC−SW−ES es 0912NH
Documentación sobre el controlador del motor CMMP−AS
El presente manual sirve para trabajar de forma segura con elsistema de bus de campo EtherCAT para el controlador demotor CMMP−AS.
Para más información, consulte los manuales siguientes rela�tivos a la serie de productos CMMP:
Nombre Código de tipo Contenido
Manual de CANopen P.BE−CMMP−CO−SW... Descripción del protocolo CANopenimplementado conforme a CiA 402 y 301.
Manual de FHPP P.BE−CMM−FHPP−SW... Descripción del perfil de datos FHPP implementado.
Manual del producto P.BE−CMMP−AS... Descripción de las especificaciones téc�nicas y de las funciones del dispositivoasí como instrucciones para la instala�ción y el funcionamiento del controladorde motor CMMP−AS.

Contenido y medidas generales de seguridad
XIIIFesto P.BE−CMMX−EC−SW−ES es 0912NH
Información sobre la versión
La información de este manual hace referencia a las variantesde hardware y a las versiones del firmware del controlador demotor CMMP−AS y del software de parametrización FCT(Festo Configuration Tool) especificadas a continuación:
Firmware Hardware Software de parametrización
Observación
3.5.1501.3 1.0 y superiores 1.2 y superiores
El controlador de motor CMMP−AS dispone de una memoriade programas FLASH que permite actualizar el software de servicio (firmware) del controlador de motor CMMP−ASincluso después de su entrega e instalación en la máquina. El fabricante desarrolla y amplía constantemente el softwarede servicio del controlador de motor CMMP−AS para respon�der adecuadamente al mayor número de necesidades posiblede cada cliente.

Contenido y medidas generales de seguridad
XIV Festo P.BE−CMMX−EC−SW−E S es 0912NH
Términos y abreviaciones
Término/abreviación Significado
ASIC Application Specific Integrated Circuit
CiA CAN in Automation
CoE CANopen over EtherCAT
DS Draft Standard
ETG EtherCAT Technology Group
EtherCAT Ethernet for Controller and Automation Technology
ESC EtherCAT Slave Controller
FCT Festo Configuration Tool
FHPP Perfil de Festo para manipulación y posicionamiento
FPGA Field Programmable Gate Array
FW Firmware
IEC Comisión Electrotécnica Internacional
PDI Process Data Interface
Tab.�0/1: Índice de términos y abreviaciones

Medidas de seguridad para actuadores eléctricos ycontroladores
1−1Festo P.BE−CMMX−EC−SW−E S es 0912NH
Capítulo 1

1. Medidas de seguridad para actuadores eléctricos y controladores
1−2 Festo P.BE−CMMX−EC−SW−E S es 0912NH
8. Medidas de seguridad para actuadores eléctricos y controladores 1−1 . . . . .
1.1 Indicaciones generales 1−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Peligros derivados de la utilización incorrecta 1−6 . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Medidas de seguridad 1−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Medidas generales de seguridad 1−7 . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Medidas de seguridad para el montaje y el mantenimiento 1−10 . . . . . .
1.3.3 Protección para evitar el contacto con componentes electrónicos 1−13
1.3.4 Protección PELV contra descarga eléctrica 1−15 . . . . . . . . . . . . . . . . . . .
1.3.5 Protección contra movimientos peligrosos 1−16 . . . . . . . . . . . . . . . . . . .
1.3.6 Protección para evitar el contacto con piezas calientes 1−17 . . . . . . . . .
1.3.7 Protección durante la manipulación y el montaje 1−18 . . . . . . . . . . . . . .

1. Medidas de seguridad para actuadores eléctricos y controladores
1−3Festo P.BE−CMMX−EC−SW−E S es 0912NH
1.1 Indicaciones generales
La empresa Festo SE & Co. KG no asume ninguna responsabi� lidad por daños ocasionados por la inobservancia de las indi� caciones de advertencia del presente manual de instruccio� nes.
NotaAntes de la puesta en marcha deben leerse al completo lasmedidas de seguridad para actuadores eléctricos y contro�ladores.
En caso de problemas de comprensión de la documentaciónen el presente idioma, consulte al proveedor e infórmele alrespecto.
Para que el controlador del motor funcione correctamente yde manera segura, es indispensable que el transporte, elalmacenamiento, el montaje y la instalación se realicen deforma apropiada. Asimismo, el manejo y el mantenimientodeben efectuarse con gran cuidado.
NotaLas tareas en las instalaciones eléctricas deben ser realiza�das exclusivamente por personal cualificado.
Personal cualificado
Por personal cualificado se designa, tanto en el presente ma�nual del producto, como en las indicaciones de advertenciadel propio producto, a toda persona familiarizada en sufi�ciente medida con la instalación, el montaje, la puesta enmarcha y el funcionamiento del producto, así como con todaslas advertencias y medidas de seguridad indicadas en estemanual de instrucciones. Asimismo, estas personas debendisponer de la cualificación correspondiente para efectuar lastareas respectivas:
1. Medidas de seguridad para actuadores eléctricos y controladores
1−4 Festo P.BE−CMMX−EC−SW−E S es 0912NH
� Formación e instrucción o autorización para conectar ydesconectar equipos/sistemas según los estándares de latécnica de seguridad y para poner a tierra y señalizar se�gún las necesidades de la tarea.
� Formación o instrucción según los estándares de la téc�nica de seguridad en mantenimiento y uso del equipo deseguridad adecuado.
� Formación en primeros auxilios.
Las notas siguientes deben leerse antes de poner en marchala instalación por primera vez para impedir que se produzcanlesiones y/o daños materiales:
Estas medidas de seguridad deben observarse siempre.
No intente instalar el controlador del motor ni ponerlo enmarcha sin leer antes al completo las medidas de seguridadpara actuadores eléctricos y controladores del presente do�cumento. Estas instrucciones de seguridad y el resto de las instruccio�nes para el usuario deben ser leídas en su totalidad cada vezque se empiece a trabajar con el controlador del motor.
Si no dispone de las instrucciones para el usuario del contro�lador del motor, póngase en contacto con el representante desu distribuidor. Solicite el envío inmediato de este documento al encargado oencargados del funcionamiento seguro del controlador delmotor.
Las medidas de seguridad deben incluirse siempre en casode venta, alquiler y/o cualquier otro tipo de cesión del con�trolador del motor.
La empresa explotadora no está autorizada a abrir el contro�lador del motor bajo ninguna circunstancia, por razones deseguridad y de garantía.
La planificación profesional del controlador del motor es con�dición indispensable para su correcto funcionamiento.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−5Festo P.BE−CMMX−EC−SW−E S es 0912NH
AdvertenciaLa utilización incorrecta del controlador del motor y lainobservancia de las indicaciones de advertencia aquí indi�cadas, además de la intervención incorrecta en los disposi�tivos de seguridad, pueden causar daños materiales,lesiones, descarga eléctrica o, en casos extremos,la�muerte.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−6 Festo P.BE−CMMX−EC−SW−E S es 0912NH
1.2 Peligros derivados de la utilización incorrecta
AdvertenciaAlta tensión y corriente de trabajo elevada.
Peligro de muerte o lesiones graves por descarga eléctrica.
AdvertenciaAlta tensión en caso de conexión errónea.
Peligro de muerte o lesiones por descarga eléctrica.
AdvertenciaLas superficies de la carcasa del equipo pueden estar ca�lientes.
Riesgo de lesiones. Peligro de quemaduras.
AdvertenciaMovimientos peligrosos.
Peligro de muerte, lesiones graves o daños materiales porel movimiento accidental de los motores.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−7Festo P.BE−CMMX−EC−SW−E S es 0912NH
1.3 Medidas de seguridad
1.3.1 Medidas generales de seguridad
AdvertenciaEl controlador del motor cumple la clase de protecciónIP20, así como el grado de contaminación 1.
Observe que el entorno cumpla las exigencias de la clasede protección o el grado de contaminación anteriores.
AdvertenciaUtilice exclusivamente accesorios y repuestos permitidospor el fabricante.
AdvertenciaLos controladores del motor deben conectarse a la redconforme indican las normas EN y VDE de manera quepuedan separarse de la red con los interruptores apropia�dos (p.�ej., interruptor general, contactor, disyuntor).
El controlador del motor puede asegurarse con un interruptordiferencial AC/DC (RCD = Residual Current protective Device)de 300 mA.
AdvertenciaPara conectar los contactos, deben utilizarse contactosdorados o contactos con alta presión de contacto.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−8 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Como prevención deben tomarse medidas de blindaje, como,p.�ej., la conexión de contactores y relés con elementos RC odiodos.
Observe el reglamento y las disposiciones de seguridad delpaís donde se ponga en funcionamiento el equipo.
AdvertenciaObserve las condiciones de entorno indicadas en la docu�mentación del producto.
No está permitido utilizar aplicaciones que no garanticenuna seguridad absoluta, sin la autorización expresa delfabricante.
Las instrucciones para la instalación conforme a las directivasEMC se encuentran en el manual del producto del CMMP−AS.La observancia de los valores límite especificados por lasdirectivas nacionales es responsabilidad de los fabricantes dela instalación o de la máquina.
AdvertenciaEs obligatorio consultar y aplicar las especificaciones téc�nicas y las condiciones de conexión y de instalación para elcontrolador del motor indicadas en el presente manual.
AdvertenciaObserve las normas generales de construcción y el regla�mento de seguridad para trabajar en instalaciones de co�rriente de alta intensidad (p. ej., DIN, VDE, EN, IEC u otrasdirectivas nacionales e internacionales).La inobservancia puede causar la muerte, lesiones o da�ños materiales considerables.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−9Festo P.BE−CMMX−EC−SW−E S es 0912NH
Algunas de las normas pertinentes:
� VDE 0100 Disposición para construir instalaciones decorriente de alta intensidad de hasta 1000 V
� EN 60204 Equipo eléctrico de las máquinas
� EN 50178 Equipo electrónico para uso en instalaciones depotencia
1. Medidas de seguridad para actuadores eléctricos y controladores
1−10 Festo P.BE−CMMX−EC−SW−E S es 0912NH
1.3.2 Medidas de seguridad para el montaje y el mantenimiento
Para el montaje y el mantenimiento de la instalación debenobservarse siempre las normas DIN, VDE, EN e IEC pertinen�tes, así como todas las normativas nacionales y locales relati�vas a la seguridad y a la prevención de accidentes. El cons�tructor de la instalación o la empresa explotadora sonresponsables del cumplimiento de dichas normas.
AdvertenciaEl manejo, el mantenimiento y/o la reparación del contro�lador del motor sólo deben ser efectuados por personalcualificado para trabajar en equipos eléctricos.
Prevención de accidentes, lesiones y/o daños materiales:
AdvertenciaEl freno de sostenimiento del motor suministrado de serieu otro externo, controlado por un regulador de acciona�miento, no sirven, por sí solos, para proteger al personal.
· Adicionalmente, los ejes verticales deben asegurarsepara que no se caigan ni desciendan después de desco�nectar el motor, p. ej., mediante:
� El bloqueo mecánico del eje vertical.
� Un freno, un colector o un sistema de bloqueo de vás�tago externos.
� El equilibrio adecuado del peso del eje.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−11Festo P.BE−CMMX−EC−SW−E S es 0912NH
AdvertenciaLas resistencias externa o interna de frenado son conducti�vas y pueden conducir una tensión peligrosa en el circuitointermedio incluso hasta aprox. 5 minutos después dedesconectar el controlador del motor. El contacto con lasresistencias puede causar la muerte o lesiones graves.
· Antes de realizar las tareas de mantenimiento, asegú�rese de que la alimentación de corriente está desconec�tada, bloqueada y de que el circuito intermedio estádescargado.
· Desconecte la tensión del equipo eléctrico mediante elinterruptor general y asegúrelo para que no pueda vol�ver a conectarse. Espere a que el circuito intermedio sedescargue para realizar:
� Tareas de mantenimiento y de reparación.
� Tareas de limpieza.
� Una interrupción prolongada de las operaciones.
AdvertenciaProceda con cuidado durante el montaje. Asegúrese deque no puedan caer virutas de taladrado, polvo metálico nipiezas (tornillos, tuercas, secciones de cable) en el interiordel controlador del motor durante el montaje ni el funcio�namiento del actuador.
Asimismo debe asegurarse de que la fuente de alimentaciónexterna del regulador (24 V) esté desconectada.
Desconecte siempre la fuente de alimentación de la unidadde potencia antes de desconectar la alimentación de 24 V dela parte de mando.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−12 Festo P.BE−CMMX−EC−SW−E S es 0912NH
AdvertenciaLas tareas en el área de la máquina deben efectuarse úni�camente cuando la alimentación de corriente alterna ocontinua está desconectada y bloqueada.
La desactivación de las etapas de salida o del desbloqueodel regulador no proporciona un bloqueo apropiado. Si seutiliza, el actuador puede ponerse en marcha de formaaccidental en caso de avería.
AdvertenciaEfectúe la puesta en funcionamiento con los motores alralentí para impedir daños mecánicos causados, p.�ej., porun sentido de giro equivocado.
AdvertenciaPor lo general, los equipos electrónicos pueden sufrir ave�rías.
· El usuario es responsable de garantizar la seguridad dela instalación en caso de avería del equipo eléctrico.
AdvertenciaEl controlador del motor y, en particular, las resistencias defrenado (externa o interna) pueden alcanzar temperaturaselevadas y ocasionar quemaduras graves si se tocan.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−13Festo P.BE−CMMX−EC−SW−E S es 0912NH
1.3.3 Protección para evitar el contacto con componentes electrónicos
Esta sección sólo es aplicable a equipos y componentes deaccionamiento de tensiones superiores a 50 V. El contactocon componentes de tensiones superiores a 50 V es peligrosopara las personas y puede causar una descarga eléctrica.Durante el funcionamiento de equipos eléctricos, determina�dos componentes se encuentran bajo una tensión peligrosa.
AdvertenciaPeligro de muerte por tensión.
Alta tensión eléctrica.
Peligro de muerte y riesgo de lesiones graves por descargaeléctrica.
Para el funcionamiento deben observarse siempre las normasDIN, VDE, EN e IEC pertinentes, así como todas las normati�vas nacionales y locales relativas a la seguridad y a la preven�ción de accidentes. El constructor de la instalación o la em�presa explotadora son responsables del cumplimiento dedichas normas:
AdvertenciaAntes de poner en marcha, coloque las tapas y los disposi�tivos de protección previstos para impedir el contacto conlos equipos.
Para garantizar que no haya contacto directo con los com�ponentes electrónicos en equipos para montaje empo�trado, debe utilizarse una carcasa externa como, p.�ej.,un�armario de maniobra.
Observe las normas VGB4 al respecto.
AdvertenciaEl conductor protector del equipo eléctrico y de los equi�pos debe quedar siempre firmemente conectado a la redde alimentación.
La corriente de defecto es superior a 3,5 mA debido a losfiltros de red integrados.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−14 Festo P.BE−CMMX−EC−SW−E S es 0912NH
AdvertenciaObserve la sección mínima de cobre obligatoria a lo largode todo el conductor protector, conforme a la normaEN�60617.
AdvertenciaAntes de la puesta en marcha y para tareas de medición ycomprobación, conecte siempre el conductor protector atodos los equipos eléctricos, conforme al diagrama deconexiones, o conéctelo al conductor de tierra.
De lo contrario, en la carcasa pueden darse tensiones ele�vadas que causen una descarga eléctrica.
AdvertenciaNo toque las conexiones eléctricas de los componentescuando estén conectadas.
Advertencia· Desconecte el equipo de la red o de la fuente de tensiónantes de acceder a componentes electrónicos con ten�siones superiores a 50 V.
· Asegúrelo para que no pueda volver a conectarse.
AdvertenciaEl valor de la tensión del circuito intermedio debe tenerseen cuenta durante la instalación, sobre todo por razonesde aislamiento y para tomar las medidas de seguridadadecuadas.
La puesta a tierra, el dimensionado de los cables y la pro�tección contra cortocircuito correspondiente deben garan�tizarse debidamente.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−15Festo P.BE−CMMX−EC−SW−E S es 0912NH
AdvertenciaEl equipo dispone de un interruptor de descarga rápida delcircuito intermedio según la norma EN 60204, apartado6.2.4. La descarga rápida puede no ser efectiva en ciertascombinaciones de equipos, sobre todo en la conexión enparalelo de varios controladores de motor en el circuitointermedio o con una resistencia de frenado no conectada.Después de la desconexión, los controladores de motorpueden estar bajo tensión peligrosa hasta 5 minutos(carga residual del condensador).
1.3.4 Protección PELV contra descarga eléctrica
Todas las conexiones y bornes con tensión comprendida en�tre 5 y 50 V del controlador del motor son del tipo PELV yestán diseñados para impedir descargas eléctricas por con�tacto conforme a las normas siguientes:
Internacional: IEC 60364−4−41.
Países de la Unión Europea: EN 50178/1998, apartado 5.2.8.1.
AdvertenciaAlta tensión en caso de conexión errónea.
Peligro de muerte o lesiones por descarga eléctrica.
Todas las conexiones y bornes con tensiones comprendidasentre 0 y 50 V deben conectarse únicamente a equipos, componentes electrónicos y cables de tensión PELV (PELV = Protective Extra Low Voltage)
Conecte únicamente tensiones y circuitos que dispongan deuna separación segura contra tensiones peligrosas.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−16 Festo P.BE−CMMX−EC−SW−E S es 0912NH
La separación segura se obtiene, p. ej., con transformadoresde aislamiento, optoacopladores seguros o mediante el fun�cionamiento con baterías y sin conexión a la red.
1.3.5 Protección contra movimientos peligrosos
Los movimientos peligrosos pueden producirse debido a uncontrol erróneo de los motores conectados. Las causas pue�den ser muy variadas:
� Cableado sucio o defectuoso.
� Fallos en el manejo de los componentes.
� Fallos en los transmisores y en los emisores de señales.
� Componentes averiados o no conformes con las normasEMC.
� Fallos de software en el sistema de mando de nivel superior.
Estos fallos pueden producirse justo después de conectar otras un tiempo indeterminado en funcionamiento.
La supervisión de los componentes de accionamiento permiteevitar en gran medida el funcionamiento incorrecto de losactuadores conectados. Respecto a la protección del perso�nal y, en especial, al peligro de lesiones y/o daños materiales,no debe confiarse únicamente en este procedimiento. Hastaque los sistemas de supervisión incorporados no se activen,debe contarse en todo caso con que los ejes se moverán in�correctamente en un grado que dependerá del tipo de controly del estado operativo.
AdvertenciaMovimientos peligrosos.
Peligro de muerte y riesgo de lesiones graves o daños materiales.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−17Festo P.BE−CMMX−EC−SW−E S es 0912NH
Debido a las razones especificadas más arriba, es necesariogarantizar la protección del personal mediante sistemas desupervisión o medidas a nivel de la instalación. El constructorde la instalación debe disponerlos conforme a las característi�cas de la instalación y al análisis de los peligros y de los fa�llos. En este proceso debe incluirse el reglamento de seguri�dad vigente. Si los dispositivos de seguridad se desconectan,se ignoran o no se activan, la máquina puede realizar movi�mientos accidentales o puede funcionar incorrectamente.
1.3.6 Protección para evitar el contacto con piezas calientes
AdvertenciaLas superficies de la carcasa del equipo pueden estar calientes.
Riesgo de lesiones. Peligro de quemaduras.
AdvertenciaPeligro de quemaduras.
· No toque la superficie de la carcasa en las zonas próxi�mas a fuentes de calor.
· Después de la desconexión, deje enfriar los equiposdurante 10 minutos antes de tocarlos.
Si se tocan piezas calientes del equipo, como la carcasa,en cuyo interior se encuentran radiadores y resistores,pueden producirse quemaduras.

1. Medidas de seguridad para actuadores eléctricos y controladores
1−18 Festo P.BE−CMMX−EC−SW−E S es 0912NH
1.3.7 Protección durante la manipulación y el montaje
La manipulación y el montaje incorrectos de piezas y compo�nentes determinados puede causar lesiones.
AdvertenciaRiesgo de lesiones por manipulación incorrecta.
Lesiones por aplastamiento, acizallamiento, corte e im�pacto.
Medidas generales de seguridad pertinentes:
Advertencia· Observe las normas generales de construcción y el re�glamento de seguridad para la manipulación y el mon�taje.
· Utilice dispositivos de montaje y de transporte apropia�dos.
· Aplique las medidas adecuadas para evitar atrapamien�tos y aplastamientos.
· Utilice sólo herramientas apropiadas. Utilice herramien�tas especiales, si así se indica.
· Utilice dispositivos de elevación y herramientas deforma profesional.
· Si es necesario, utilice equipamiento protector ade�cuado (p.�ej., gafas, calzado y guantes protectores).
· No permanezca bajo cargas suspendidas.
· Elimine inmediatamente líquidos vertidos en el suelopara evitar el riesgo de caídas por resbalamiento.

Resumen
2−1Festo P.BE−CMMX−EC−SW−E S es 0912NH
Capítulo 2
2. Resumen
2−2 Festo P.BE−CMMX−EC−SW−E S es 0912NH
9. Resumen 2−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 CANopen 2−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 EtherCAT 2−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Protocolo EtherCAT 2−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Interface EtherCAT CAMC−EC 2−11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Archivo de descripción XML 2−13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

2. Resumen
2−3Festo P.BE−CMMX−EC−SW−E S es 0912NH
2.1 CANopen
CANopen es un estándar definido por la Asociación �CAN inAutomation". Dicha asociación reúne a numerosos fabrican�tes de dispositivos. Este estándar ha reemplazado en granmedida los protocolos CAN específicos de cada fabricante.Así, el usuario final dispone de una interface de comunicaciónindependiente del fabricante. La asociación dispone, entreotros, de los siguientes manuales:
CiA Draft Standard 201−207: En este documento se recogen los fundamentos generales yla implementación de CANopen en el modelo de capas OSI. El presente manual de CANopen contiene los puntos relevan�tes de dicho manual, por lo tanto, en general no es precisoadquirir el DS201−207.
CiA Draft Standard 301: En este documento se describe la estructura básica del direc�torio de objetos de un dispositivo CANopen y el acceso almismo. También se ofrece información detallada de las espe�cificaciones del DS201−207. Los elementos del directorio deobjetos necesarios para los controladores de motor de laserie CMMP y los métodos de acceso correspondientes estándescritos en el presente manual. Se recomienda disponer delestándar DS301, aunque no es imprescindible.
CiA Draft Standard 402: este documento trata la implementación concreta de CANopen en controles para accionamientos. Aunque todoslos objetos implementados están brevemente documentadosy descritos en el manual de CANopen, el usuario tambiéndebería disponer de dicho documento.
Datos de contacto:
CAN in Automation (CiA) International HeadquarterAm Weichselgarten 2691058 Erlangen (Alemania)Tel.: +49 (0)9131 601091Fax: +49 (0)9131 601092www.can−cia.de

2. Resumen
2−4 Festo P.BE−CMMX−EC−SW−E S es 0912NH
La implementación CANopen del controlador del motor cum�ple las siguientes normas:
� [1] − CiA Draft Standard 301, versión 4.02, 13 de febrero de 2002.
� [2] − CiA Draft Standard Proposal 402, versión 2.0, 26 de julio de 2002.

2. Resumen
2−5Festo P.BE−CMMX−EC−SW−E S es 0912NH
2.2 EtherCAT
El sistema de bus de campo EtherCAT significa �Ethernet forController and Automation Technology" (Ethernet aplicado a la tecnología de automatización y control) y ha sido desarrollado por la empresa Beckhoff. Cuenta con el respaldoy asesoramiento de la organización internacional EtherCATTechnology Group (ETG) y está concebido como un protocolode código abierto, conforme a las normas de Comisión Elec�trotécnica Internacional (IEC).EtherCAT es un sistema de bus de campo basado en elestándar Ethernet que fija nuevos estándares de velocidad yque, gracias a su topología flexible (en línea, árbol, estrella) ysencilla configuración, puede manipularse como un bus decampo.El protocolo EtherCAT se transmite directamente a la tramaEthernet según el estándar IEEE802.3 con un campo tipo deEthernet especial normalizado. Permite broadcast, multicast ycomunicación entre slaves. En EtherCAT, el intercambio de datos se realiza en un hard�ware dedicado. Por ello se utiliza para el slave un hardwareespecial que procesa el telegrama de Ethernet conforme alprotocolo EtherCAT. Estos intérpretes de protocolos parahardware se ofrecen como un ASIC (Application Specific Inte�grated Circuit − circuito integrado de aplicación específica) ocomo una FPGA (Field Programmable Gate Array − matriz depuertas programables) con su correspondiente software.
En la tabla siguiente se muestran las versiones de ASIC yFPGA que pueden implementarse en el hardware.
Función ESC10 ESC20 ASIC
FMMU 2 4 � 8
Sync Manager 4 6 � 8
DPRAM 4 kB 4 kB 4 kB
AL Event Mask register x x
Process Data Interfaces (PDI)

2. Resumen
2−6 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Función ASICESC20ESC10
8/16 bit �C Interface x x x
32 bit digital x x x
SPI x x
Distributed Clocks x x
Tab.�2/2: Resumen de las funciones del controlador del slave EtherCAT
La función de master suele realizarse únicamente con soft�ware sin que tenga que utilizarse un hardware específico.Esto significa que en la mayoría de los casos es suficiente con disponer de una conexión estándar de Ethernet para elmaster.
El sistema de bus de campo EtherCAT define únicamente unprotocolo nuevo para la capa de transporte. No define unprotocolo específico para el usuario ni para el equipo. Esmás, EtherCAT es capaz de transmitir diferentes protocolosde usuario y de equipo ya existentes y probados a través delprotocolo EtherCAT (tunneling − pasar por un túnel).

2. Resumen
2−7Festo P.BE−CMMX−EC−SW−E S es 0912NH
EtherCAT soporta los siguientes protocolos de usuario yequipo:
Soportado por CMMP−AS
CANopen over EtherCAT(CoE)
Sí, opcionalmente con obje�tos CiA301/402 o con el per�fil de datos FHPP de Festo
Perfil servodrive segúnnorma IEC 61491 over EtherCAT (SoE) (se corresponde con el protocolo 2 de SERCOS)
No
File Access over EtherCAT(FoE)
No
Ethernet over EtherCAT (EoE) No
Tab.�2/3: Protocolos de usuario y equipo
El controlador de motor CMMP−AS con interface CAMC−ECsoporta el protocolo CoE (CANopen over EtherCAT) utilizandoel FPGA ESC20. Los objetos de comunicación CANopen sepasan por un túnel a través de telegramas EtherCAT.
En términos de procesamiento electrónico de datos se en−tiende por tunnelling la transmisión de datos de un protocolode red (aquí, los objetos de comunicación CANopen de losprotocolos CiA402 y CiA301) encapsulados en otro protocolode red (aquí, el protocolo EtherCAT CoE).
En Fig.�2/1 se muestra un esquema de los sistemas de bus decampo EtherCAT multiprotocolo. Aquí se aprecia la relevanciadel protocolo CANopen over EtherCAT (protocolo CoE) usadopor el controlador del motor CMMP−AS.
Como puede apreciarse en Fig.�2/1, el protocolo EtherC ATpone el protocolo de correo electrónico (para la comunicación

2. Resumen
2−8 Festo P.BE−CMMX−EC−SW−E S es 0912NH
acíclica) y el protocolo de datos de proceso (para el intercam�bio cíclico de datos) a disposición de la capa de transporte.
Estos dos protocolos sirven para reconocer y procesar el protocolo CoE. De este modo, los objetos de comunicaciónCA�Nopen pasados por un túnel se transmiten al nivel deaplicación CANopen implementado y se procesan interna�mente en el controlador de motor como objetos de comuni−cación CANopen estándar.
El protocolo de telegramas de correo electrónico sirve para latransmisión acíclica de datos, p. ej., en el telegrama de latrama SDO para la transmisión de objetos de comunicaciónCANopen SDO estándar.
El protocolo de telegramas de datos de proceso sirve para latransmisión cíclica de datos, p. ej., en el telegrama de latrama PDO para la transmisión de telegramas PDO estándar.
File system, bootloader
HTTP, FTP, ...
SERCOS Application
CANopen Application
Process Data
UDP
File Access
TCP
IP
Ethernet
IDN
Service Channel
Object Dictionary
SDOPDOMapping
ATMDT
EtherCAT Slave Controller
FoE SoEEoE CoE CoE/SoE
Mailbox Process Data
Physical Layer
Fig.�2/1: Sistema de bus de campo EtherCAT multiprotocolo
En la sección 2.3 �Protocolo EtherCAT" se describe con másdetalle el protocolo EtherCAT.

2. Resumen
2−9Festo P.BE−CMMX−EC−SW−E S es 0912NH
El sistema de bus de campo EtherCAT dispone de funcionesde detección de errores y diagnosis para los siguientes ca�sos:
� Rotura de cable o ausencia de respuesta.
� Respuesta errónea en el ciclo de comprobación (no hanrespondido todos los slaves).
� Funcionamiento normal redundante (segundo puertoEthernet).
� Redundancia de la línea.
� Redundancia hot−standby del master.
� Cambio de equipos con la red en funcionamiento.
� Conexión en caliente (hot−connect) de segmentos delínea.
Para integrar fácilmente un equipo compatible con EtherCAT,como por ejemplo un controlador de motor CMMP−AS, se crea para cada uno de estos equipos un archivo XML (Extended Markup Language). Este archivo XML, facilitadopor el fabricante, contiene una descripción detallada delequipo que debe conectarse y de sus características. En elcapítulo 2.5 �Archivo de descripción XML" encontrará unadescripción del archivo XML para el CMMP−AS.

2. Resumen
2−10 Festo P.BE−CMMX−EC−SW−E S es 0912NH
2.3 Protocolo EtherCAT
El protocolo EtherCAT está optimizado para transmitir datosde proceso a través de Ethernet. Para el protocolo EtherCATse ha definido en su trama un EtherType (campo tipo) propio(88A4h). Esto permite transportar los datos de EtherCAT di�rectamente como tramas Ethernet estándar. Se opta por estetipo de transferencia cuando todos los participantes del busse encuentran en la misma subred de Ethernet. Para la comunicación más allá de la subred actual puedeutilizarse también el protocolo UDP/IP para transmitir paque�tes de datos de EtherCAT. Para ello ha de intercambiarse únicamente la cabecera de Ethernet por la del UDP/IP. Losdatos útiles de EtherCAT no se ven alterados (véase la figura Fig.�2/2).Un telegrama de EtherCAT puede constar de varios subtele�gramas que respectivamente pueden manejar un espacio dememoria de la imagen del proceso lógico de un tamaño dehasta 4 GB. La secuencia de los datos no depende del ordende conexión física de tipo Ethernet a la red. Puede direccio�narse libremente. Permite broadcast, multicast y comunica�ción entre slaves.
160�bitHeader
Destination Source
Ethernet H.
EtherType48�bit 48�bit 16�bit 16�bit 32�bit
MTU:�max.�1514�Byte
CRC
CRC
1...n EtherCATCommands
Header
64�bit
1�bit 4�bit11�bit
Length0 11 12 15
Res. Type
IP�Header UDP�H....
...
Embedded�in�Standard�Ethernet�Framewith�Ether�Type�88A4h
Or:�via�UDP/IPwith�UDP�Port�88A4h
Fig.�2/2: Estructura del telegrama de EtherCAT

2. Resumen
2−11Festo P.BE−CMMX−EC−SW−E S es 0912NH
2.4 Interface EtherCAT CAMC−EC
La interface EtherCAT CAMC−EC permite conectar el controla�dor de motor CMMP al sistema de bus de campo EtherCAT. Lacomunicación a través de la interface EtherCAT (IEEE 802.3u)se realiza con un cableado estándar para EtherCAT y puedeefectuarse entre controladores CMMP con firmware de laversión 3.5.1501.3.x, o superior, y software de parametriza�ción FCT de la versión 1.2.0.xxx, o superior.
El protocolo CoE (CANopen over EtherCAT) del CMMP de Festo es compatible con el FPGA ESC20 de la empresa Beckhoff. Soporta perfiles de datos DS402 y FHPP.
La interface EtherCAT sólo puede funcionar en la ranura op�cional Ext2. No es posible utilizar otras interfaces en la ranuraExt1, a excepción del módulo CAMC−D−8E8A.
Características técnicas de la interface EtherCATCAMC−EC
Características de la interface EtherCAT:
� Desde el punto de vista mecánico, es completamenteintegrable en los controladores del motor de la serieCMMP−AS.
� EtherCAT conforme a IEEE−802.3u (100Base−TX) con 100 Mbps (en dúplex (completo)).
� Topologías de estrella y en línea.
� Conectores enchufables: RJ45.
� Interface EtherCAT con separación de potencial.
� Ciclo de comunicación: 1�ms (con el perfil DS402); 2�ms (con el perfil FHPP).
� Máx. 127 slaves.

2. Resumen
2−12 Festo P.BE−CMMX−EC−SW−E S es 0912NH
� La implementación del slave EtherCAT se basa en el pro�tocolo FPGA ESC20 de la empresa Beckhoff.
� Soporta �relojes distribuidos" para aceptar el valor nomi�nal del tiempo de manera sincronizada.
� Indicadores LED para el estado operacional y detecciónde enlaces caídos.

2. Resumen
2−13Festo P.BE−CMMX−EC−SW−E S es 0912NH
2.5 Archivo de descripción XML
Para poder conectar equipos slave EtherCAT a un masterEtherCAT, cada slave EtherCAT deberá disponer de su archivode descripción correspondiente. El archivo de descripción esequiparable a los archivos EDS para el sistema de bus decampo CANopen o a los archivos GSD de Profibus. A diferen�cia de estos archivos, la descripción de EtherCAT tiene for�mato XML, un formato utilizado con frecuencia en aplicacio�nes web e Internet, y contiene la siguiente informaciónreferente al slave EtherCAT:
� Datos del fabricante del equipo.
� Nombre, tipo y versión del equipo.
� Tipo y versión del protocolo que deben utilizarse paraeste equipo (p. ej., CANopen over Ethernet, etc.).
� Parametrización del equipo y configuración de los datosde proceso.
EJEMPLO de un archivo de descripción XML para el CMMP:
<?xml version="1.0" encoding="UTF−8"?><EtherCATInfo Version="0.2">
<Vendor><Id>#x1D</Id><Name>Festo SE</Name><ImageData16x14>424DE60000000000000076000000 28000000100000000E00000001000400000000007000 0000C40A0000C40A00000000000000000000BA79230 0CE962900CC944300DCAD4900D2A36600E2B96900E3 C07E00EED09800F3D7AE00F3E0BF00F7EBCA00F7EED 800F7EF00FFF5ED00FFFFF700FFFFFF00ECFDCCCCBDE BECBDB6F9445448D4B647A4F7223126C09225A3E67 B8585B085A3A3A66AA875C276E3A146448625C276E3 B006206005C076E3A3A58B84ABC076D1A2856772767 16371A033136233315333B013113307214507D99A99 9A8C99AB8CFEEEEEEEEFEEEEEFFFFFFFFFFFFFFFFF</ImageData16x14>
</Vendor><Descriptions>

2. Resumen
2−14 Festo P.BE−CMMX−EC−SW−E S es 0912NH
<Groups><Group SortOrder="1"><Type>Festo E−Drives</Type><Name LcId="1033">Festo E−Drives</Name>
</Groups><Devices>
<Device Physics="YY"><Type ProductCode="#x264860d3" RevisionNo= "#x20000">CMMP−AS</Type><Name LcID="1033">CMMP−AS</Name><Name LcID="1031">CMMP−AS</Name>
Utilizando el protocolo EtherCAT, la parametrización completade los parámetros de comunicación para el equipo utilizadopuede fijarse a través del archivo de descripción XML. Si seutiliza CoE, se incluye también, p. ej., la parametrización delos objetos de datos de proceso para el intercambio cíclico dedatos.
Estos datos suelen leerse durante la fase de inicialización delmaster EtherCAT (generalmente un PLC o un CNC) y utilizarsepara la inicialización y la comunicación cíclica con el slave.

Montaje
3−1Festo P.BE−CMMX−EC−SW−E S es 0912NH
Capítulo 3

3. Montaje
3−2 Festo P.BE−CMMX−EC−SW−E S es 0912NH
10. Montaje 3−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Montaje de la interface EtherCAT en el controlador 3−3 . . . . . . . . . . . . . . . . . . . .

3. Montaje
3−3Festo P.BE−CMMX−EC−SW−E S es 0912NH
3.1 Montaje de la interface EtherCAT en el controlador
AdvertenciaLa no observancia de las �Medidas de seguridad para actuadores eléctricos y controladores" especificadas en el capítulo 1 puede causar daños materiales, lesiones,descarga eléctrica o, en casos extremos, la muerte.
AdvertenciaAntes de montar el módulo, todos los conductores de corriente deben desconectarse del regulador de acciona�miento.
Desatornille la chapa frontal sobre el compartimento opcionalExt2 del controlador de motor CMMP con un destornillador deestrella adecuado. Introduzca el módulo de tecnología Ether�CAT en el compartimento opcional abierto (Ext2) de maneraque la pletina se desplace en las guías laterales del comparti�mento. Empuje el módulo de tecnología hasta el tope. Porúltimo, atornille el módulo de tecnología a la carcasa del con�trolador del motor con el tornillo de estrella. Asegúrese deque la placa frontal haga contacto conductor con la carcasadel CMMP (tierra protectora/PE).
En la placa frontal del módulo de tecnología EtherCAT estándispuestos los siguientes elementos:
� LED 1 (LED de dos colores) para:
� Comunicación EtherCAT (amarillo).
� �Conexión activa en el puerto 1" (rojo).
� Run (verde).
� LED 2 (rojo) para indicar �Conexión activa en el puerto 2".
� Dos conectores tipo zócalo RJ45.

3. Montaje
3−4 Festo P.BE−CMMX−EC−SW−E S es 0912NH
En la Fig. siguiente se muestra la posición de los conectorestipo zócalo y su numeración:
X1
X2
LED�2 LED�1
Fig.�3/3: Posición de los elementos en la placa frontal

Instalación
4−1Festo P.BE−CMMX−EC−SW−E S es 0912NH
Capítulo 4
4. Instalación
4−2 Festo P.BE−CMMX−EC−SW−E S es 0912NH
11. Instalación 4−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Asignación de clavijas y especificaciones de cables 4−3 . . . . . . . . . . . . . . . . . . .
4.1.1 Modelos de conectores enchufables X1 y X2 4−3 . . . . . . . . . . . . . . . . .
4.1.2 Asignación de los conectores enchufables X1 y X2 4−3 . . . . . . . . . . . . .
4.1.3 Tipo y modelos de cable 4−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.4 Asignación de pines en X1 y X2 4−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.5 Terminación de bus 4−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

4. Instalación
4−3Festo P.BE−CMMX−EC−SW−E S es 0912NH
4.1 Asignación de clavijas y especificaciones de cables
4.1.1 Modelos de conectores enchufables X1 y X2
Conectores tipo zócalo RJ45
X1 (conector tipo Enlace ascendente al master o a un participante anterior de zócalo RJ45 arriba) una conexión lineal (p. ej., varios controladores de motor).
X2 (conector tipo Enlace ascendente al master, fin de una conexión lineal o zócalo RJ45 abajo) conexión de otros participantes conectados a continuación.
4.1.2 Asignación de los conectores enchufables X1 y X2
PIN Especificación
1 Señal del receptor− (RX−) Par de hilos 3
2 Señal del receptor+ (RX+) Par de hilos 3
3 Señal del emisor− (TX−) Par de hilos 2
4 Par de hilos 1
5 Par de hilos 1
6 Señal del emisor+ (TX+) Par de hilos 2
7 Par de hilos 4
8 Par de hilos 4
Tab.�4/4: Asignación de los conectores enchufables X1 y X2

4. Instalación
4−4 Festo P.BE−CMMX−EC−SW−E S es 0912NH
4.1.3 Tipo y modelos de cable
El cableado se efectúa con cables de par trenzado apantalla�dos STP, cat. 5. Se admiten topologías de estrella y lineales.La red debe construirse conforme a la regla 5−4−3. Puedencablearse un máximo de 10 concentradores en línea. El mó�dulo de tecnología EtherCAT incluye un concentrador. La lon�gitud máxima de cableado está limitada a 100�m.
La denominación de los cables utilizada aquí hace referenciaa los cables de las empresas LAPP y Lütze. Dichos cables sonde eficacia probada y permiten obtener buenos resultados ennumerosas aplicaciones, aunque es posible utilizar cablessimilares de otros fabricantes.
Longitud de cable Nº de art.
Cables EtherCAT de la empresa LAPP
0,5 m 90PCLC50000
1 m 90PCLC500010
2 m 90PCLC500020G
5 m 90PCLC500050G
Cables EtherCAT de la empresa Lütze
0,5 m 192000
1 m 19201
5 m 19204
Tab.�4/5: Cables EtherCAT

4. Instalación
4−5Festo P.BE−CMMX−EC−SW−E S es 0912NH
PrecauciónFallos por la utilización de cables de bus no apropiados.
A causa de las posibles velocidades de transmisión muyelevadas, recomendamos utilizar exclusivamente cables yconectores enchufables estandarizados. Éstos disponenparcialmente de opciones de diagnóstico adicionales yfacilitan el análisis rápido de la interface del bus de campoen caso de fallo.
Al construir la red EtherCAT deben seguirse obligatoria�mente los consejos de la documentación de uso habitual yobservarse la información y las notas siguientes para queel sistema sea estable y no tenga fallos. Si el cableado nose realiza debidamente, durante el funcionamiento puedenaparecer averías en el bus EtherCAT que pueden causarque el controlador de motor CMMP se desconecte a causade un fallo, por motivos de seguridad.
4.1.4 Asignación de pines en X1 y X2
Fig.�4/4: Asignación de pines en X1 y X2
4.1.5 Terminación de bus
No se requieren terminaciones externas de bus. El módulo detecnología EtherCAT supervisa sus dos puertos y termina elbus automáticamente (función loopback).

4. Instalación
4−6 Festo P.BE−CMMX−EC−SW−E S es 0912NH

CANopen over EtherCAT (CoE)
5−1Festo P.BE−CMMX−EC−SW−E S es 0912NH
Capítulo 5

5. CANopen over EtherCAT (CoE)
5−2 Festo P.BE−CMMX−EC−SW−E S es 0912NH
12. CANopen over EtherCAT (CoE) 5−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Interface de comunicación CANopen 5−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Configuración de la interface de comunicación 5−4 . . . . . . . . . . . . . . . .
5.1.2 Objetos de comunicación CANopen nuevos y modificados en CoE 5−8
5.1.3 Objetos de comunicación CANopen no soportados en CoE 5−20 . . . . . .
5.2 Perfil FHPP 5−22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Máquina de estado de comunicación 5−27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Diferencias entre las máquinas de estado de CANopen y EtherCAT 5−30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Trama SDO 5−31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Trama PDO 5−33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Control de errores 5−36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7 Trama de emergencia 5−37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.8 Adaptación del archivo de descripción de equipos XML 5−38 . . . . . . . . . . . . . . . .
5.8.1 Estructura básica del archivo de descripción de equipos 5−39 . . . . . . . .
5.8.2 Configuración de PDO de recepción en el nodo RxPDO 5−41 . . . . . . . . .
5.8.3 Configuración del PDO de transmisión en el nodo TxPDO 5−43 . . . . . . .
5.8.4 Órdenes de inicialización a través del nodo �Mailbox" 5−44 . . . . . . . . . .
5.9 Sincronización (Distributed Clocks) 5−46 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

5. CANopen over EtherCAT (CoE)
5−3Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.1 Interface de comunicación CANopen
Como ya se describió en el capítulo 1, los protocolos de usua�rio se pasan por un túnel EtherCAT. Para el protocolo ANopenover EtherCAT (CoE) soportado por CMMP−AS, la mayoría delos objetos del nivel de comunicación son compatibles con lanorma CANopen DS301 de CiA de EtherCAT. Estos objetossirven, en su mayoría, para establecer la comunicación entremaster y slave.
La mayoría de los objetos que también puede manejarse através de un bus de campo CANopen normal es soportadapor el perfil Motion CANopen conforme a CiA 402. Por lo ge�neral, la implementación de CoE Ethercat del controlador delmotor CMMP−AS soporta los servicios y los grupos de objetossiguientes:
SDO Objeto de datos de servicio: se utiliza para parametrizar nor�malmente el controlador del motor.
PDO Objeto de datos de proceso: permite intercambiar datos deproceso rápidamente (p. ej., el número real de revoluciones).
EMCY Mensaje de emergencia: transmite mensajes de error.
Cada uno de los objetos que puede llamarse a través del protocolo CoE del controlador del motor CMMP−AS, puedeenviarse de manera interna a la implementación CANopenexistente y ser procesado allí. Por esta razón, en este manualse omitirá la descripción detallada de los objetos CANopenindividuales. Consulte el manual CANopen para obtener másinformación al respecto.
Los objetos individuales de comunicación CANopen se describen en el manual CANopen �Controlador del motor CMMP−AS".
En todo caso, en la implementación CoE con EtherCAT se hanañadido algunos objetos CANopen nuevos, necesarios parala conexión especial a través de CoE. Esto se debe a la modifi�cación de la interface de comunicación entre los protocolosEtherCAT y CANopen. Aquí se utiliza el denominado Sync

5. CANopen over EtherCAT (CoE)
5−4 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Manager para controlar la transmisión de objetos de datos deproceso y de objetos de datos de servicio a través de ambostipos de transferencia EtherCAT (protocolos de correo electró�nico y de datos de proceso).
El Sync Manager y los pasos de configuración necesarios parael funcionamiento del CMMP−AS con CoE EtherCAT se descri�ben en el capítulo 5.1.1 �Configuración de la interface decomunicación". El resto de los objetos se describen en elcapítulo 5.1.2 �Objetos de comunicación CANopen nuevos ymodificados en CoE".
Asimismo, en una conexión CoE a través de EtherCAT no sesoportan algunos objetos CANopen del CMMP−AS disponi�bles en una conexión CANopen normal. En el capítulo 5.1.3�Objetos de comunicación CANopen no soportados en CoE"figura una lista de los objetos CANopen no compatibles con CoE.
5.1.1 Configuración de la interface de comunicación
Como ya se describió en el capítulo 1, el protocolo EtherCATutiliza dos tipos de transferencia diferentes para transmitirlos protocolos del equipo y del usuario como, p. ej., el proto�colo CANopen over EtherCAT (CoE) utilizado por el CMMP−AS.Los tipos de transferencia son: el protocolo de telegramas decorreo electrónico para datos acíclicos y el protocolo de tele�gramas de datos de proceso para transmitir datos cíclicos.
En el protocolo CoE, estos dos tipos se utilizan para diferen�tes tipos de transferencia CANopen como se indica a conti�nuación:
� Protocolo de telegramas de correo electrónico: este tipo de transferencia sirve para transmitir los objetosde datos de servicio (SDO) definidos en CANopen. EnEtherCAT, éstos se transmiten en tramas de SDO. Éstas sedescriben con más detalle en el capítulo 5.4 �Tramas deSDO".

5. CANopen over EtherCAT (CoE)
5−5Festo P.BE−CMMX−EC−SW−E S es 0912NH
� Protocolo de telegramas de datos de proceso: Este tipo de transferencia sirve para transmitir objetos dedatos de proceso (PDO) definidos en CANopen utilizadospara intercambiar datos cíclicos. En EtherCAT, éstos setransmiten en tramas de PDO. Éstas se describen con másdetalle en el capítulo 5.5 �Tramas de PDO".
En principio, con estos dos tipos de transferencia, todos losobjetos de datos de proceso y los objetos de datos de servi�cio pueden utilizarse para el CMMP−AS del mismo modo defi�nido para el protocolo CANopen. Consulte el manual de CANopen del controlador del motor CMMP−AS para obtenermás información al respecto.
La parametrización de los objetos de datos de proceso y delos objetos de datos de servicio se diferencia en los ajustesque son necesarios realizar en CANopen para enviar los obje�tos a través de EtherCAT. Para integrar los objetos CANopenque deben intercambiarse a través de transmisiones de PDOy de SDO entre el master y el slave en el protocolo EtherCAT,se ha implementado un Sync Manager con EtherCAT.
El Sync Manager sirve para integrar los datos de los objetosde datos de proceso y objetos de datos de servicio que de�ben enviarse en los telegramas EtherCAT. Con este fin, el SyncManager proporciona varios canales de sincronización quepueden convertir un canal de datos CANopen (SDO de recep�ción, SDO de transmisión, PDO de recepción o PDO de trans�misión) al telegrama EtherCAT.

5. CANopen over EtherCAT (CoE)
5−6 Festo P.BE−CMMX−EC−SW−E S es 0912NH
En la figura se muestra la integración del Sync Manager en elsistema:
EtherCAT Bus
SYNC−Kanal 0
SYNC−Kanal 1
SYNC−Kanal 2
SYNC−Kanal 3
ESC10
Receive SDO
Transmit SDO
Receive PDO (1/2)
Transmit PDO (1/2)
Fig.�5/5: Ejemplo de asignación de los objetos de datos de servicio y de los objetos dedatos de proceso en los canales de sincronización
Todos los objetos se envían a través de los denominadoscanales de sincronización. Los datos de estos canales se inte�gran y transmiten automáticamente al flujo de datos Ether�CAT. La implementación EtherCAT en el controlador del motorCMMP−AS soporta cuatro canales de sincronización de estascaracterísticas.
Por esta razón, es necesario realizar un asignación adicionalde los objetos de datos de servicio y de los objetos de datosde proceso en los canales de sincronización para CANopen.Esto se efectúa mediantes los objetos de Sync Manager (objetos 0x1C00 y 0x1C10 a 0x1C13; véase el capítulo 5.1.2).Estos objetos se describen con más detalle a continuación.

5. CANopen over EtherCAT (CoE)
5−7Festo P.BE−CMMX−EC−SW−E S es 0912NH
El CMMP−AS dispone de cuatro canales individuales de sin�cronización. La asignación de dichos canales a los tipos detransferencia es fija y el usuario no puede cambiarla. Asigna�ción:
� Canal de sincronización 0: protocolo de telegramas decorreo electrónico para SDO entrantes (master => slave).
� Canal de sincronización 1: protocolo de telegramas decorreo electrónico para SDO salientes (master <= slave).
� Canal de sincronización 2: protocolo de telegramas dedatos de proceso para PDO entrantes (master => slave).Observe aquí el objeto 0×1C12.
� Canal de sincronización 3: protocolo de telegramas dedatos de proceso para PDO salientes (master <= slave).Observe aquí el objeto 0×1C13.
La parametrización de los objetos de datos de proceso seajusta mediante los objetos 0x1600 a 0x1603 (PDO de recep�ción) y 0x1A00 a 0x1A03 (PDO de transmisión). Los objetosde datos de proceso se parametrizan como se describe en elmanual de CANopen.
En principio, el ajuste de los canales de sincronización y laconfiguración de los objetos de datos de proceso sólo pue�den efectuarse en estado �Pre−Operational".
EtherCAT no contempla la parametrización del slave. Los archivos de descripción de equipos sirven para este fin. Enellos está predeterminada la parametrización completa, incluyendo la parametrización de objetos de datos de pro�ceso, y�el master la utiliza durante la inicialización.
Por lo tanto, la parametrización no debe modificarse manual�mente, sino en los archivos de descripción del equipo. En lasección 5.8 se describen con más detalle los puntos más im�portantes para el usuario de los archivos de descripción delequipo.

5. CANopen over EtherCAT (CoE)
5−8 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Los canales de sincronización descritos aquí NO se corres�ponden con los telegramas de sincronización conocidos porCANopen. Los telegramas de sincronización CANopen puedenseguir transmitiéndose como objetos de datos de servicio através de la interface SDO implementada con CoE pero noafectan directamente en los canales de sincronización descri�tos más arriba.
5.1.2 Objetos de comunicación CANopen nuevos y modificados en CoE
En la tabla siguiente se muestran los índices y los subíndicesde los objetos de comunicación compatibles con CANopenañadidos al sistema de bus de campo EtherCAT para el mar�gen comprendido entre 0×1000h y 0×1FFFh. Éstos sustituyensobre todo los parámetros de comunicación conforme aCia�301.

5. CANopen over EtherCAT (CoE)
5−9Festo P.BE−CMMX−EC−SW−E S es 0912NH
Valor Significado Autorizado por
0x1000 Device Type Identificador del mando del equipo
0x1018 Identity Object ID del vendedor, código del producto, nº de revisión,nº de serie
0x1100 EtherCAT fixed station ad�dress
Dirección fija que el master asigna al slave durante lainicialización
0x1600 1. RxPDO Mapping Identificador del primer PDO de recepción
0x1601 2. RxPDO Mapping Identificador del segundo PDO de recepción
0x1602 3. RxPDO Mapping Identificador del tercer PDO de recepción
0x1603 4. RxPDO Mapping Identificador del cuarto PDO de recepción
0x1A00 1. TxPDO Mapping Identificador del primer PDO de transmisión
0x1A01 2. TxPDO Mapping Identificador del segundo PDO de transmisión
0x1A02 3. TxPDO Mapping Identificador del tercer PDO de transmisión
0x1A003 4. TxPDO Mapping Identificador del cuarto PDO de transmisión
0x1C00 Sync Manager Communica�tion Type
Objeto para configurar los canales individuales desincronización (transferencia de SDO o PDO)
0x1C10 Sync Manager PDO Map�ping for Syncchannel 0
Asignación del canal de sincronización 0 a un PDO/SDO(el canal 0 está siempre reservado para Mailbox Receive SDO Transfer)
0x1C11 Sync Manager PDO Map�ping for Syncchannel 1
Asignación del canal de sincronización 1 a un PDO/SDO (el canal 1 está siempre reservado paraMailbox Send SDO Transfer)
0x1C12 Sync Manager PDO Map�ping for Syncchannel 2
Asignación del canal de sincronización 2 a un PDO(el canal 2 está reservado para PDO de recepción)
0x1C13 Sync Manager PDO Map�ping for Syncchannel 3
Asignación del canal de sincronización 3 a un PDO(el canal 3 está reservado para PDO de transmisión)
Tab.�5/6: Objetos de comunicación nuevos y modificados
5. CANopen over EtherCAT (CoE)
5−10 Festo P.BE−CMMX−EC−SW−E S es 0912NH
En los capítulos siguientes se describen con más detalle losobjetos 0×1C00 y 0×1C10 a 0×1C13, ya que únicamente es�tán definidos e implementados en el protocolo CoE EtherCATy, por tanto, no están documentados en el manual de CANopen para el controlador del motor CMMP−AS.
El controlador del motor CMMP−AS con interface EtherCATsoporta cuatro PDO de recepción (RxPDO) y cuatro PDO detransmisión (TxPDO).
CMMP−AS no soporta los objetos 0x1008, 0x1009 y 0x100Aporque las cadenas de lenguaje usual no pueden leerse en elcontrolador del motor.
Objeto 1100h − EtherCAT fixed station address
A través de este objeto se asigna una dirección inequívoca al slave durante la fase de inicialización. A continuación seexplica el significado del objeto:
Index 1011h
Name EtherCAT fixed station address
Object Code V
Data Type uint16
Access ro
PDO Mapping no
Value Range 0...FFFFh
Default Value 0

5. CANopen over EtherCAT (CoE)
5−11Festo P.BE−CMMX−EC−SW−E S es 0912NH
Objeto 1C00h − Sync Manager Communication Type
A través de este objeto puede leerse el tipo de transferenciade los diferentes canales del Sync Manager EtherCAT. Comoel CMMP−AS con protocolo CoE EtherCAT sólo soporta loscuatro primeros canales de sincronización, los objetos si�guientes sólo son de lectura (del tipo �read only").De este modo, la configuración del Sync Manager para elCMMP−AS es fija. A continuación se explica el significado delos objetos:
Index 1C00h
Name Sync Manager Communication Type
Object Code Array
Data Type uint8
Sub−Index 00h
Description Number of used Sync Manager Channels
Access ro
PDO Mapping no
Value Range 4
Default Value 4
Sub−Index 01h
Description Communication Type Sync Channel 0
Access ro
PDO Mapping no
Value Range 2: Mailbox Transmit (Master => Slave)
Default Value 2: Mailbox Transmit (Master => Slave)

5. CANopen over EtherCAT (CoE)
5−12 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Sub−Index 02h
Description Communication Type Sync Channel 1
Access ro
PDO Mapping no
Value Range 2: Mailbox Transmit (Master <= Slave)
Default Value 2: Mailbox Transmit (Master <= Slave)
Sub−Index 03h
Description Communication Type Sync Channel 2
Access ro
PDO Mapping no
Value Range 0: unused3: Process Data Output (RxPDO / Master =>Slave)
Default Value 3
Sub−Index 04h
Description Communication Type Sync Channel 3
Access ro
PDO Mapping no
Value Range 0: unused4: Process Data Input (TxPDO / Master <=Slave)
Default Value 4
5. CANopen over EtherCAT (CoE)
5−13Festo P.BE−CMMX−EC−SW−E S es 0912NH
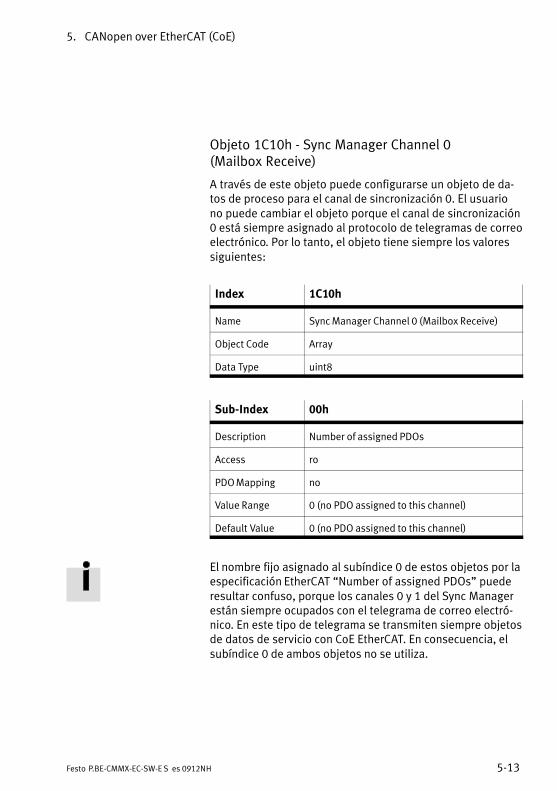
Objeto 1C10h − Sync Manager Channel 0 (Mailbox Receive)
A través de este objeto puede configurarse un objeto de da�tos de proceso para el canal de sincronización 0. El usuariono puede cambiar el objeto porque el canal de sincronización0 está siempre asignado al protocolo de telegramas de correoelectrónico. Por lo tanto, el objeto tiene siempre los valoressiguientes:
Index 1C10h
Name Sync Manager Channel 0 (Mailbox Receive)
Object Code Array
Data Type uint8
Sub−Index 00h
Description Number of assigned PDOs
Access ro
PDO Mapping no
Value Range 0 (no PDO assigned to this channel)
Default Value 0 (no PDO assigned to this channel)
El nombre fijo asignado al subíndice 0 de estos objetos por laespecificación EtherCAT �Number of assigned PDOs" puederesultar confuso, porque los canales 0 y 1 del Sync Managerestán siempre ocupados con el telegrama de correo electró−nico. En este tipo de telegrama se transmiten siempre objetosde datos de servicio con CoE EtherCAT. En consecuencia, elsubíndice 0 de ambos objetos no se utiliza.

5. CANopen over EtherCAT (CoE)
5−14 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Objeto 1C11h − Sync Manager Channel 1 (Mailbox Send)
A través de este objeto puede configurarse un objeto de da�tos de proceso para el canal de sincronización 1. El usuariono puede cambiar el objeto porque el canal de sincronización1 está siempre asignado al protocolo de telegramas de correoelectrónico. Por lo tanto, el objeto tiene siempre los valoressiguientes:
Index 1C11h
Name Sync Manager Channel 1 (Mailbox Send)
Object Code Array
Data Type uint8
Sub−Index 00h
Description Number of assigned PDOs
Access ro
PDO Mapping no
Value Range 0 (no PDO assigned to this channel)
Default Value 0 (no PDO assigned to this channel)
5. CANopen over EtherCAT (CoE)
5−15Festo P.BE−CMMX−EC−SW−E S es 0912NH
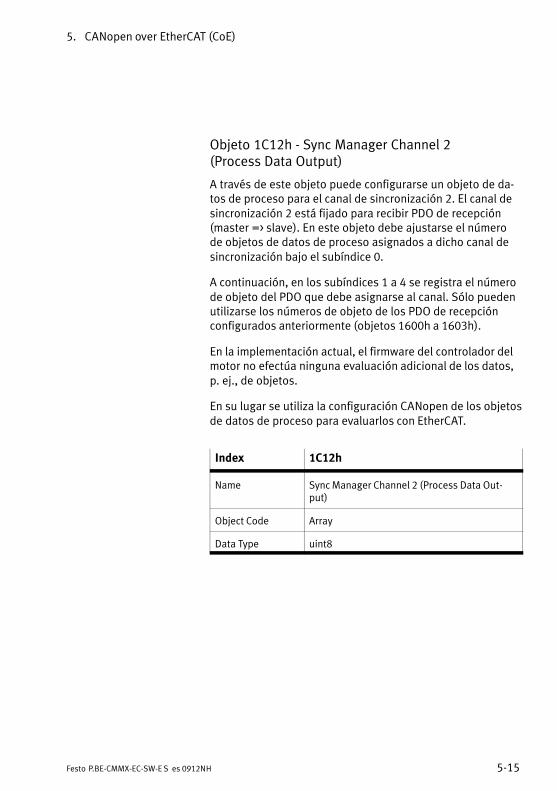
Objeto 1C12h − Sync Manager Channel 2 (Process Data Output)
A través de este objeto puede configurarse un objeto de da�tos de proceso para el canal de sincronización 2. El canal desincronización 2 está fijado para recibir PDO de recepción(master => slave). En este objeto debe ajustarse el número de objetos de datos de proceso asignados a dicho canal desincronización bajo el subíndice 0.
A continuación, en los subíndices 1 a 4 se registra el númerode objeto del PDO que debe asignarse al canal. Sólo puedenutilizarse los números de objeto de los PDO de recepciónconfigurados anteriormente (objetos 1600h a 1603h).
En la implementación actual, el firmware del controlador delmotor no efectúa ninguna evaluación adicional de los datos,p. ej., de objetos.
En su lugar se utiliza la configuración CANopen de los objetosde datos de proceso para evaluarlos con EtherCAT.
Index 1C12h
Name Sync Manager Channel 2 (Process Data Out�put)
Object Code Array
Data Type uint8
5. CANopen over EtherCAT (CoE)
5−16 Festo P.BE−CMMX−EC−SW−E S es 0912NH
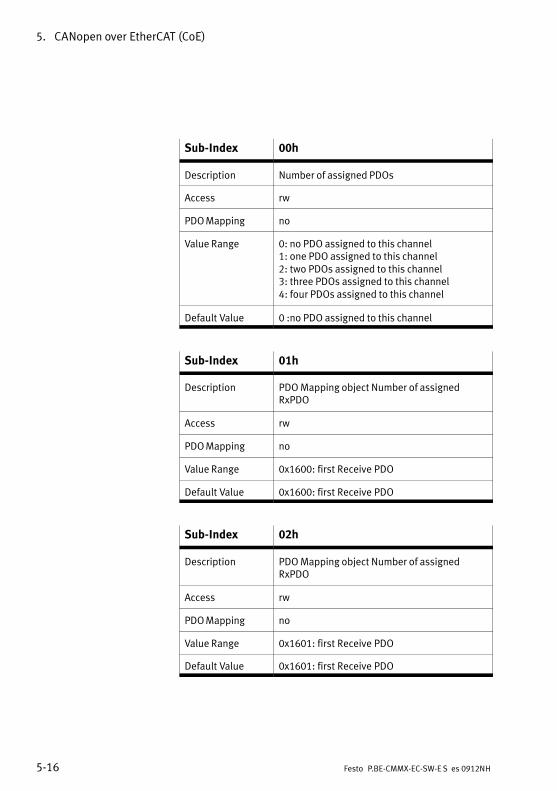
Sub−Index 00h
Description Number of assigned PDOs
Access rw
PDO Mapping no
Value Range 0: no PDO assigned to this channel1: one PDO assigned to this channel2: two PDOs assigned to this channel3: three PDOs assigned to this channel4: four PDOs assigned to this channel
Default Value 0 :no PDO assigned to this channel
Sub−Index 01h
Description PDO Mapping object Number of assignedRxPDO
Access rw
PDO Mapping no
Value Range 0x1600: first Receive PDO
Default Value 0x1600: first Receive PDO
Sub−Index 02h
Description PDO Mapping object Number of assignedRxPDO
Access rw
PDO Mapping no
Value Range 0x1601: first Receive PDO
Default Value 0x1601: first Receive PDO

5. CANopen over EtherCAT (CoE)
5−17Festo P.BE−CMMX−EC−SW−E S es 0912NH
Sub−Index 03h
Description PDO Mapping object Number of assignedRxPDO
Access rw
PDO Mapping no
Value Range 0x1602: first Receive PDO
Default Value 0x1602: first Receive PDO
Sub−Index 04h
Description PDO Mapping object Number of assignedRxPDO
Access rw
PDO Mapping no
Value Range 0x1603: first Receive PDO
Default Value 0x1603: first Receive PDO
5. CANopen over EtherCAT (CoE)
5−18 Festo P.BE−CMMX−EC−SW−E S es 0912NH
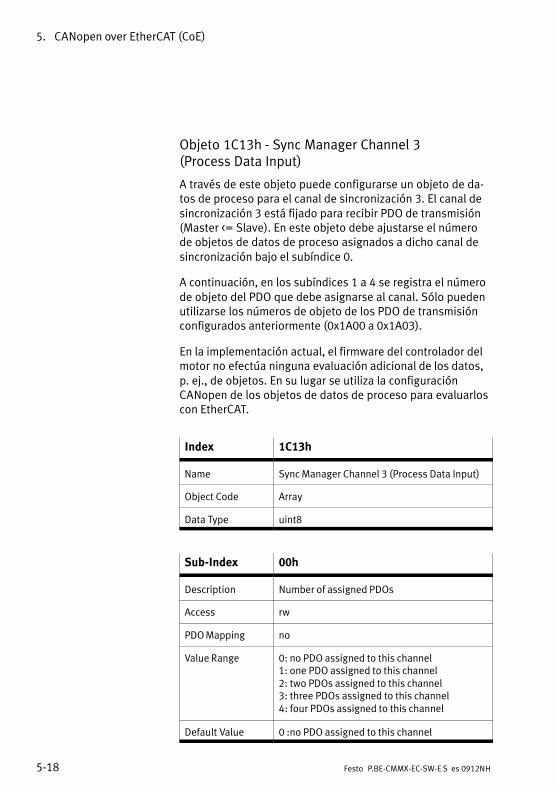
Objeto 1C13h − Sync Manager Channel 3 (Process Data Input)
A través de este objeto puede configurarse un objeto de da�tos de proceso para el canal de sincronización 3. El canal desincronización 3 está fijado para recibir PDO de transmisión(Master <= Slave). En este objeto debe ajustarse el númerode objetos de datos de proceso asignados a dicho canal desincronización bajo el subíndice 0.
A continuación, en los subíndices 1 a 4 se registra el númerode objeto del PDO que debe asignarse al canal. Sólo puedenutilizarse los números de objeto de los PDO de transmisiónconfigurados anteriormente (0x1A00 a 0x1A03).
En la implementación actual, el firmware del controlador delmotor no efectúa ninguna evaluación adicional de los datos,p. ej., de objetos. En su lugar se utiliza la configuración CANopen de los objetos de datos de proceso para evaluarloscon EtherCAT.
Index 1C13h
Name Sync Manager Channel 3 (Process Data Input)
Object Code Array
Data Type uint8
Sub−Index 00h
Description Number of assigned PDOs
Access rw
PDO Mapping no
Value Range 0: no PDO assigned to this channel1: one PDO assigned to this channel2: two PDOs assigned to this channel3: three PDOs assigned to this channel4: four PDOs assigned to this channel
Default Value 0 :no PDO assigned to this channel

5. CANopen over EtherCAT (CoE)
5−19Festo P.BE−CMMX−EC−SW−E S es 0912NH
Sub−Index 01h
Description PDO Mapping object Number of assignedTxPDO
Access rw
PDO Mapping no
Value Range 0x1A00: first Transmit PDO
Default Value 0x1A00: first Transmit PDO
Sub−Index 02h
Description PDO Mapping object Number of assignedTxPDO
Access rw
PDO Mapping no
Value Range 0x1A01: first Transmit PDO
Default Value 0x1A01: first Transmit PDO
Sub−Index 03h
Description PDO Mapping object Number of assignedTxPDO
Access rw
PDO Mapping no
Value Range 0x1A02: first Transmit PDO
Default Value 0x1A02: first Transmit PDO

5. CANopen over EtherCAT (CoE)
5−20 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Sub−Index 04h
Description PDO Mapping object Number of assignedTxPDO
Access rw
PDO Mapping no
Value Range 0x1A03: first Transmit PDO
Default Value 0x1A03: first Transmit PDO
5.1.3 Objetos de comunicación CANopen no soportados en CoE
Algunos objetos CANopen del CMMP−AS disponibles en unaconexión CANopen directa no se soportan si el CMMP−AS seconecta con �CANopen over EtherCAT". En la tabla siguientese muestran dichos objetos:
Identificador Nombre Significado
0x1008 Manufacturer Device Name (String) Nombre del equipo (no hay objeto)
0x1009 Manufacturer Hardware Version (String) Versión de hardware (no hay objeto)
0x100A Manufacturer Software Version (String) Versión de software (no hay objeto)
0x6089 position_notation_index Indica el número de puestos decimalesutilizados para visualizar los valores deposición en el controlador. El objeto sólosirve como contenedor de datos. El firm�ware no realiza una evaluación adicio�nal.
0x608A position_dimension_index Indica la unidad utilizada para visualizarlos valores de posición en el controlador.El objeto sólo sirve como contenedor dedatos. El firmware no realiza una evalua�ción adicional.

5. CANopen over EtherCAT (CoE)
5−21Festo P.BE−CMMX−EC−SW−E S es 0912NH
Identificador SignificadoNombre
0x608B velocity_notation_index Indica el número de puestos decimalesutilizados para visualizar los valores develocidad en el controlador. El objetosólo sirve como contenedor de datos.El�firmware no realiza una evaluaciónadicional.
0x608C velocity_dimension_index Indica la unidad utilizada para visualizarlos valores de velocidad en el controla�dor. El objeto sólo sirve como contene�dor de datos. El firmware no realiza unaevaluación adicional.
0x608D acceleration_notation_index Indica el número de puestos decimalesutilizados para visualizar los valores deaceleración en el controlador. El objetosólo sirve como contenedor de datos.El�firmware no realiza una evaluaciónadicional.
0x608E acceleration_dimension_index Indica la unidad utilizada para visualizarlos valores de aceleración en el controla�dor. El objeto sólo sirve como contene�dor de datos. El firmware no realiza unaevaluación adicional.

5. CANopen over EtherCAT (CoE)
5−22 Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.2 Perfil FHPP
El perfil FHPP también puede utilizarse como alternativa alperfil DS301/402. Aquí pueden emplearse todos los objetosFHPP referidos en el manual FHPP de los controladores delmotor del tipo CMM...

5. CANopen over EtherCAT (CoE)
5−23Festo P.BE−CMMX−EC−SW−E S es 0912NH
Introducción al FHPP
Festo ha desarrollado y optimizado un perfil de datos espe�cialmente ajustado a tareas de manipulación y posicionado:el �Festo Handling and Positioning Profile (FHPP)." El FHPP permite un control y una programación uniformespara los diferentes sistemas de bus de campo y controlado�res de Festo.
Además, ofrece al usuario la definición unificada de:
� Modos de funcionamiento.
� Estructura de datos E/S.
� Objetos de parámetro.
� Control secuencial.
Comunicación a través de bus de campo
Selección de registros
Acceso libre a todos losparámetros − Lectura yescritura
. . .
Tarea directa Parametrización
Posición Velocidad Momento
. . .
1
2
3...n
>
Fig.�5/6: El principio FHPP
5. CANopen over EtherCAT (CoE)
5−24 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Datos de control y de estado
La comunicación a través de bus de campo se realiza con8�bytes de estado y de control. Las funciones y los mensajesde estado requeridos en funcionamiento pueden escribirse yleerse directamente.
Selección de registros
Los registros de posicionado guardados pueden procesarseen el modo Selección de registro. Para ello, durante la puesta en funcionamiento, los registrosde posicionado se parametrizan con el Festo ConfigurationTool o se programan por teach−in a través de FHPP.
Tarea directa
En el modo de funcionamiento Tarea directa, los datos deposicionado importantes son transferidos directamente através de los bytes de control.
� El controlador puede determinar y definir las posicionesde destino, las velocidades y los momentos durante eltiempo de ejecución, según el estado operativo.
� No hay limitaciones debido al número de registros deposicionado guardados.
Parametrización
El controlador puede acceder a todos los valores de paráme�tros a través del bus de campo por medio del canal de pará�metros.Para ello se utilizan otros datos E/S de 8 bytes.

5. CANopen over EtherCAT (CoE)
5−25Festo P.BE−CMMX−EC−SW−E S es 0912NH
Concepto
Un PLC intercambia los siguientes datos con el FHPP:
� 8 datos de control y de estado:
� Bytes de control y de estado.
� Número de frase o posición nominal en los datos desalida.
� Acuse de recibo de la posición real y número de fraseen los datos de entrada.
� Otros valores nominales y reales, según el modo defuncionamiento.
� Si es necesario, más datos de entrada y de salida de8�bytes cada uno para parametrizar conforme a F PC.
El protocolo FHPP siempre prevé unos datos de entrada y desalida de 8 bytes respectivamente. El primer byte es fijo (o los2 primeros bytes en los modos de funcionamiento de FHPPSelección de registro y Tarea directa). Se mantiene en cadamodo de funcionamiento y controla el desbloqueo del contro�lador y de los modos de funcionamiento FHPP. Los bytes si�guientes dependen del modo de funcionamiento FHPP selec�cionado. Aquí pueden transmitirse otros bytes de estado o decontrol y valores reales y nominales.
En los datos cíclicos se permiten otros 8 bytes de entrada y 8 bytes de salida para transmitir parámetros de acuerdo conel protocolo FPC.
Si es necesario, observe la especificación del master de buspara representar palabras y palabras compuestas (Intel/Motorola). Por ejemplo, para enviar a través de CAN, la repre�sentación se efectúa en �little endian" (byte menor primero).

5. CANopen over EtherCAT (CoE)
5−26 Festo P.BE−CMMX−EC−SW−E S es 0912NH
FHPP con EtherCAT
Los datos FHPP se dividen en dos objetos de proceso de da�tos para la comunicación EtherCAT. Para transmitir tambiénse utiliza el protocolo CoE.
Objetos de datos de pro�ceso soportados
Asignación fija de datosFHPP
TxPDO 1 FHPP estándarDatos de control de 8 bytes
TxPDO 2 Canal de parámetros FPCPetición de lectura/escritura devalores de parámetros FHPP
RxPDO 1 FHPP estándarDatos de estado de 8 bytes
RxPDO 2 Canal de parámetros FPCTransmisión de valores de parámetros FHPP pedidos
Consulte el manual siguiente para obtener una descripcióndetallada del perfil de datos FHPP: �Festo Handling and Positioning Profile" P.BE−CMM−FHPP−SW−....

5. CANopen over EtherCAT (CoE)
5−27Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.3 Máquina de estado de comunicación
Como en casi todas las interfaces de bus de campo para con�troladores del motor, el master debe inicializar primero elslave conectado (aquí, el controlador del motor CMMP−AS)para poder utilizarlo en alguna aplicación. Con este fin sedefine una máquina de estado (state machine) para la comu�nicación, que establece una secuencia de manipulación fijapara dicha inicialización.
La máquina de estado también se define para la interfaceEtherCAT. Dicha máquina sólo puede cambiar a estados de�terminados y éstos son iniciados siempre por el master. Unslave no puede cambiar de estado por sí mismo. Los estadosy los cambios permitidos se describen en las tablas y en lasfiguras siguientes.
Estado Descripción
Power ON El equipo se ha conectado. Se inicializa automáticamente y cambia directamente al estado �Init".
Init En este estado, el master sincroniza el bus de campo EtherCAT. Esta opera�ción incluye el establecimiento de la comunicación asíncrona entre mastery slave (protocolo de telegramas de correo electrónico) pero todavía nohay comunicación directa entre ellos.La configuración se inicia y los valores guardados se cargan. Cuando todoslos equipos conectados al bus están configurados, se cambia al estado�Pre−Operational".
Pre−Operational En este estado, la comunicación asíncrona entre el master y el slave estáactivada. El master utiliza este estado para establecer la comunicacióncíclica a través de objetos de datos de proceso y para efectuar para−metrizaciones necesarias a través de la comunicación acíclica. Si el estado se ejecuta sin problemas, el master cambia al estado �Safe−Operational".
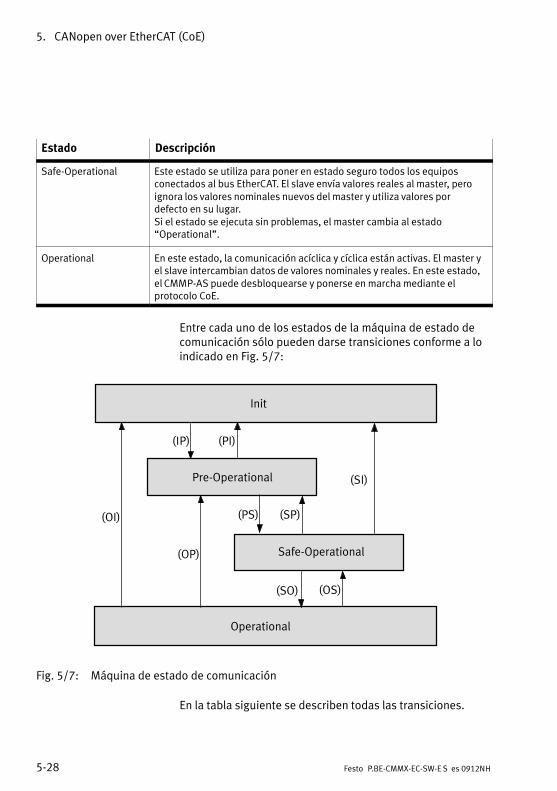
5. CANopen over EtherCAT (CoE)
5−28 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Estado Descripción
Safe−Operational Este estado se utiliza para poner en estado seguro todos los equipos conectados al bus EtherCAT. El slave envía valores reales al master, peroignora los valores nominales nuevos del master y utiliza valores por defecto en su lugar.Si el estado se ejecuta sin problemas, el master cambia al estado �Operational".
Operational En este estado, la comunicación acíclica y cíclica están activas. El master yel slave intercambian datos de valores nominales y reales. En este estado,el CMMP−AS puede desbloquearse y ponerse en marcha mediante el protocolo CoE.
Entre cada uno de los estados de la máquina de estado decomunicación sólo pueden darse transiciones conforme a loindicado en Fig.�5/7:
Init
Pre−Operational
Safe−Operational
Operational
(OI)
(OS)(SO)
(SI)
(PS)
(OP)
(PI)(IP)
(SP)
Fig.�5/7: Máquina de estado de comunicación
En la tabla siguiente se describen todas las transiciones.

5. CANopen over EtherCAT (CoE)
5−29Festo P.BE−CMMX−EC−SW−E S es 0912NH
Transición deestado
Estado
IP Inicio de la comunicación acíclica (protocolo de telegramas de correo electrónico).
PI Parada de la comunicación acíclica (protocolo de telegramas de correo electrónico).
PS Start Inputs Update: inicio de la comunicación cíclica (protocolo de telegra�mas de datos de proceso). El slave envía valores reales al master. El slaveignora los valores nominales del master y utiliza valores por defecto internos.
SP Stop Input Update: parada de la comunicación cíclica (protocolo de telegra�mas de datos de proceso). El slave deja de enviar valores reales al master.
SO Start Output Update: el slave evalúa valores de referencia actuales del master.
OS Stop Output Update: el slave ignora los valores nominales del master y utilizavalores por defecto internos.
OP Stop Output Update, Stop Input Update:parada de la comunicación cíclica (protocolo de telegramas de datos de proceso). El slave deja de enviar valores reales al master y el master deja de enviar valores nominales al slave.
SI Stop Input Update, Stop Mailbox Communication:parada de la comunicación cíclica (protocolo de telegramas de datos de proceso) y parada de la comunicación acíclica (protocolo de telegramas de correo electrónico). El slave deja de enviar valores reales al master y elmaster deja de enviar valores nominales al slave.
OI Stop Output Update, Stop Input Update, Stop Mailbox Communication: parada de la comunicación cíclica (protocolo de telegramas de datos de proceso) y parada de la comunicación acíclica (protocolo de telegramas de correo electrónico). El slave deja de enviar valores reales al master y elmaster deja de enviar valores nominales al slave.
Además de los estados aquí presentados, en la máquina deestado EtherCAT se especifica el estado �Bootstrap". Esteestado está concebido para cargar firmware nuevo en el slavecon el protocolo EtherCAT en funcionamiento.Como en el controlador del motor CMMP−AS la descarga delfirmware se realiza a través de la interface RS232, dichoestado no se ha implementado en el controlador del motorCMMP−AS.
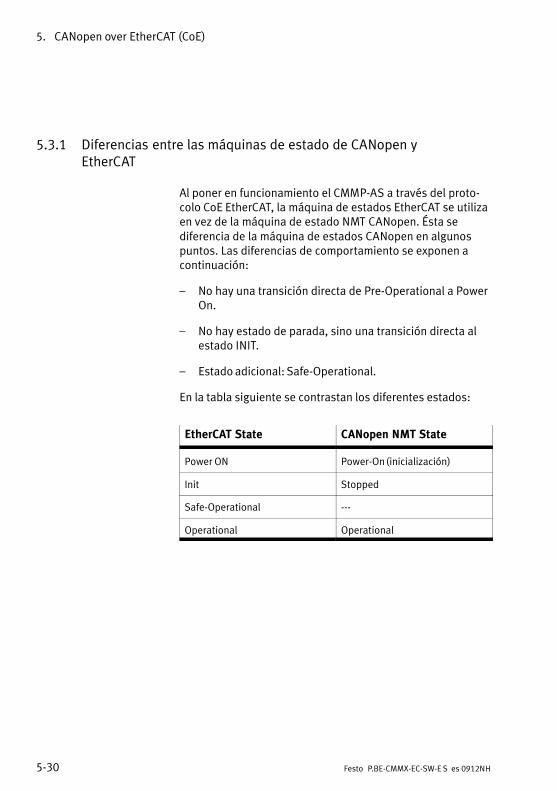
5. CANopen over EtherCAT (CoE)
5−30 Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.3.1 Diferencias entre las máquinas de estado de CANopen y EtherCAT
Al poner en funcionamiento el CMMP−AS a través del proto�colo CoE EtherCAT, la máquina de estados EtherCAT se utilizaen vez de la máquina de estado NMT CANopen. Ésta se diferencia de la máquina de estados CANopen en algunospuntos. Las diferencias de comportamiento se exponen acontinuación:
� No hay una transición directa de Pre−Operational a PowerOn.
� No hay estado de parada, sino una transición directa alestado INIT.
� Estado adicional: Safe−Operational.
En la tabla siguiente se contrastan los diferentes estados:
EtherCAT State CANopen NMT State
Power ON Power−On (inicialización)
Init Stopped
Safe−Operational −−−
Operational Operational

5. CANopen over EtherCAT (CoE)
5−31Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.4 Trama SDO
En CoE, todos los datos de una transferencia de SDO se trans�miten a través de tramas de SDO. Las tramas tienen la estruc�tura siguiente:
6�Byte 2�Byte 1�Byte 2Byte 4�Byte 1...n�Byte1�Byte
Mailbox� Header CoE�Header SDO�Control�Byte Index Subindex Data Data
Mandatory�Header Standard�CANopen�SDO�Frame optional
Fig.�5/8: Trama SDO: estructura del telegrama
Mailbox Header Datos para la comunicación de correo electrónico (longitud,dirección y tipo).
CoE Header Identificador del servicio CoE.
SDO Control Byte Identificador de una orden de lectura o de escritura.
Index Índice principal del objeto de comunicación CANopen.
Subindex Subíndice del objeto de comunicación CANopen.
Data Datos del objeto de comunicación CANopen.
Data (optional) Otros datos opcionales. El controlador del motor CMMP−ASno soporta esta opción, ya que sólo puede llamarse a objetosCANopen estándar. El tamaño máximo de dichos objetos es32 bits.
Para transmitir un objeto CANopen estándar a través de unatrama SDO de estas características, la trama SDO CANopense encapsula en una trama SDO EtherCAT y se transmite acontinuación.

5. CANopen over EtherCAT (CoE)
5−32 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Las tramas de SDO CANopen estándar pueden utilizarsepara:
� Inicializar la descarga de SDO.
� Descargar el segmento de SDO.
� Inicializar la subida de SDO.
� Subir el segmento de SDO.
� Cancelar la transferencia de SDO.
� SDO upload expedited request.
� SDO upload expedited response.
� SDO upload segmented request (máx. 1 segmento condatos útiles de 4 bytes).
� SDO upload segmented response (máx. 1 segmento condatos útiles de 4 bytes).
El controlador del motor CMMP−AS soporta todos los tipos detransferencia indicados más arriba.Como al utilizar la implementación CoE del CMMP−AS sólopueden llamarse a objetos CANopen estándar de tamañolimitado a 32 bits (4 bytes), sólo se soportan los tipos detransferencia con una longitud máxima de datos de 32 bits(4�bytes).

5. CANopen over EtherCAT (CoE)
5−33Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.5 Trama PDO
Los objetos de datos de proceso (PDO) sirven para efectuar latransmisión cíclica de datos de valores nominales y realesentre master y slave. El master debe configurarlos en el es�tado �Pre−Operational" antes de poner en funcionamiento elslave. A continuación se transmiten en tramas PDO. Las tra�mas tienen la estructura siguiente:
Process�Data Process�Data
1...8�Byte 1...n�Byte
Standard�CANopen�PDO�Frame optional
Fig.�5/9: Trama PDO: estructura del telegrama
Process Data Contenido de los datos de objeto de proceso (PDO).
Process Data (optional) Datos opcionales de otros PDO.
Para transmitir un PDO a través del protocolo CoE EtherCAT,los PDO de transmisión y de recepción deben asignarse a uncanal de transmisión del Sync Manager, además de a la confi�guración de PDO (asignación de PDO) (véase el capítulo 6.1.1�Configuración de la interface de comunicación"). El inter�cambio de datos de PDO para el controlador del motorCMMP−AS tiene lugar exclusivamente a través del protocolode telegramas de datos de proceso EtherCAT.
El controlador de motor CMMP−AS no soporta la transmisiónde los datos de proceso CANopen (PDO) a través de la comu�nicación acíclica (protocolo de telegramas de correoelectrónico).
Como en el controlador de motor CMMP−AS los datos inter�cambiados a través del protocolo CoE EtherCAT se envíandirectamente a la implementación CANopen interna, el PDOse mapea como se describe en el manual de CANopen �Controlador de motor CMMP−AS". En la figura siguiente semuestra el procedimiento:

5. CANopen over EtherCAT (CoE)
5−34 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Index Sub
6TTTh
Object� Contents
6WWWh
6YYYh
6XXXh
6VVVh
6UUUh
6ZZZh
1ZZZh
1ZZZh
1ZZZh
01h
02h
03h
6TTTh�TTh
6UUUh�UUh
6WWWh�WWh
8
16
8
YYh
XXh
WWh
VVh
UUh
TTh
ZZh
Object�A
Object�D
Object�C
Object�B
Object�E
Object�F
Object�G
Map
ping
�Object
App
lication�Object
Object�Dictionary
ObjectA
ObjectB
Object D
PDO�Length:�32�b
PDO1
Fig.�5/10: Asignación de PDO
Al transmitir los datos recibidos a través de CoE al protocoloCANopen implementado en CMMP−AS, la asignación de losobjetos CANopen y los tipos de transmisión (TransmissionTypes) disponibles de los PDO para el CMMP−AS pueden utili�zarse para los PDO que quieran parametrizarse.
El controlador de motor CMMP−AS soporta también el tipo detransmisión �Sync Message" aunque no es necesario transmi�tir el mensaje de sincronización a través de EtherCAT.
Para aceptar los datos, se utiliza la llegada del telegrama o el impulso de sincronización de hardware del mecanismo�Distributed Clocks" (véase más abajo).La interface EtherCAT para CMMP−AS soporta una sincroniza�ción a través del mecanismo con EtherCAT de los �DistributedClocks" (relojes distribuidos) gracias a emplear un móduloFPGA ESC20. El regulador de corriente del controlador delmotor CMMP−AS se sincroniza a esta frecuencia y se evalúano envían los objetos de datos de proceso configurados co�rrespondientes.

5. CANopen over EtherCAT (CoE)
5−35Festo P.BE−CMMX−EC−SW−E S es 0912NH
Consulte el manual de CANopen del controlador de motorCMMP−AS para obtener más información al respecto.
El controlador de motor CMMP−AS con interface EtherCATsoporta las funciones siguientes:
� Telegrama cíclico de trama PDO mediante el protocolo detelegramas de datos de proceso.
� Telegrama síncrono de trama PDO mediante el protocolode telegramas de datos de proceso.
El controlador de motor CMMP−AS con interface EtherCATsoporta cuatro PDO de recepción (RxPDO) y cuatro PDO detransmisión (TxPDO).

5. CANopen over EtherCAT (CoE)
5−36 Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.6 Control de errores
La implementación CoE EtherCAT para el controlador del mo�tor CMMP−AS supervisa los estados de error siguientes delbus de campo EtherCAT:
� El FPGA no está preparado al iniciarse el sistema.
� Se ha producido un error en el bus.
� Se ha producido un error en el canal del correo electró�nico. En este caso se supervisan los errores siguientes:
� Se solicita un servicio desconocido.
� Debe utilizarse otro protocolo distinto a CANopenover EtherCAT (CoE).
� Se está llamando a un Sync Manager desconocido.
Todos estos errores se definen como códigos de error (ErrorCode) para el controlador del motor CMMP−AS. Cuando seproduce uno de los errores anteriores, éste se transmite alcontrolador mediante una �Standard Emergency Frame"(trama estándar de emergencia). Consulte también los capítu�los 5.7 �Trama de emergencia" y 7.1 �Funciones de servicio ymensajes de fallo".
El controlador del motor CMMP−AS con interface EtherCATsoporta la función siguiente:
� El controlador de aplicación transmite un número de men�saje de error definido al ocurrir un evento (telegrama detrama de control de errores del regulador).

5. CANopen over EtherCAT (CoE)
5−37Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.7 Trama de emergencia
A través de la trama de emergencia CoE EtherCAT se inter�cambian mensajes de error entre el master y el slave. Lastramas de emergencia CoE sirven para transmitir directa�mente los mensajes de error definidos en CANopen (Emer�gency Messages). Los telegramas CANopen se pasan por eltúnel de tramas de emergencia CoE, como en el caso de latransmisión de SDO y PDO.
6�Byte 2�Byte 1�Byte2Byte 5�Byte 1...n�Byte
Mailbox� Header CoE�Header Error�Code Error�Register Data Data
Mandatory�Header Standard�CANopen�Emergency�Frame optional
Fig.�5/11: Trama de emergencia: estructura del telegrama
Mailbox Header Datos para la comunicación de correo electrónico (longitud,dirección y tipo).
CoE Header Identificador del servicio CoE.
ErrorCode Código de error del mensaje de emergencia CANopen.
Error Register Registro de error del mensaje de emergencia CANopen.
Data Datos del mensaje de emergencia CANopen.
Data (optional) Otros datos opcionales. Como en la implementación CoE parael controlador del motor CMMP−AS sólo se soportan tramasde emergencia CANopen estándar, el campo �Data (optional)"no se utiliza.
Como aquí también se realiza un envío simple de los mensa�jes de emergencia (Emergency Messages) recibidos y envia�dos al protocolo CANopen implementado en el controladordel motor, todos los mensajes de error pueden consultarseen el manual de CANopen del controlador de motor CMMP.

5. CANopen over EtherCAT (CoE)
5−38 Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.8 Adaptación del archivo de descripción de equipos XML
Como ya se expuso en la sección 2.5 �Archivo de descripciónXML", con EtherCAT, todos los equipos se describen con unarchivo. Este archivo puede utilizarse para conectar de ma�nera sencilla los equipos EtherCAT a un controlador EtherCAT.Este archivo contiene la parametrización completa del slave,con la parametrización del Sync Manager y de los objetos dedatos de proceso incluidos. Por esta razón, la configuracióndel slave puede modificarse con este archivo.
Festo ha confeccionado un archivo de descripción de equi−pos de estas características para el controlador del motorCMMP−AS que puede descargarse en la página web de Festo.Seguidamente explicamos el contenido de este archivo conmás detalle para que el usuario pueda adaptarlo a su apli−cación.
En los archivos de descripción de equipos se soportan losperfiles DS402 y FHPP mediante módulos seleccionables porseparado.

5. CANopen over EtherCAT (CoE)
5−39Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.8.1 Estructura básica del archivo de descripción de equipos
El archivo de descripción de equipos EtherCAT está en for�mato XML. Este formato tiene la ventaja de que puede leersey editarse con un editor de textos estándar. Un archivo XMLdescribe siempre una estructura de árbol. Las ramificacionesse definen con nodos. Estos nodos disponen de una marca deinicio y otra de fin. Dentro de un nodo puede haber un nú�mero ilimitado de subnodos.
EJEMPLO: explicación aproximada de la estructura básica deun archivo XML:
<car><engine>
<pistons>4</pistons><valves>8</valves><power>78 kW</power>...
</engine><chassis>
<interior>...</interior>...
</chassis>...
</car>
Para estructurar un archivo XML deben observarse las si�guientes reglas breves:
� Cada nodo tiene un nombre inequívoco.
� Cada nodo se abre con <nombre de nodo> y se cierra con</nombre de nodo>.

5. CANopen over EtherCAT (CoE)
5−40 Festo P.BE−CMMX−EC−SW−E S es 0912NH
El archivo de descripción de equipos para el controlador demotor CMMP−AS con CoE EtherCAT se estructura en los pun�tos siguientes:
Nombre delnodo
Significado Adaptable
Vendor Este nodo contiene el nombre y el ID del fabricante delequipo al que pertenece el mismo archivo de descripción.Además, incluye el código binario de un mapa de bits con ellogograma del fabricante.
No
Description Este punto incluye la descripción del equipo propiamentedicha con su configuración e inicialización.
Parcialmente
Group Este nodo incluye la asignación del equipo a un grupo de equipos. Estos grupos son fijos y el usuario no debe modificarlos.
No
Devices Este punto incluye la descripción del equipo. Parcialmente
En las tablas siguientes se describen exclusivamente los sub�nodos del nodo �Descriptions" necesarios para parametrizarel controlador de motor CMMP−AS con CoE. El resto de losnodos son fijos y el usuario no debe modificarlos.
Nombre delnodo
Significado Adaptable
RxPDO Fixed=... Este nodo incluye la asignación de PDO y la asignación delPDO al Sync Manager para PDO de recepción.
Sí
TxPDO Fixed=... Este nodo incluye la asignación de PDO y la asignación delPDO al Sync Manager para PDO de transmisión.
Sí
Mailbox Bajo este nodo pueden definirse órdenes que el master trans�mite al slave durante la transición de las fases �Pre−Operatio�nal" a �Operational" mediante la transferencia de SDO.
Sí

5. CANopen over EtherCAT (CoE)
5−41Festo P.BE−CMMX−EC−SW−E S es 0912NH
Como para el usuario sólo son importantes los nodos de latabla anterior para adaptar el archivo de descripción de equi�pos, los nodos se describen con detalle en los capítulos si�guientes. El contenido restante del archivo de descripción deequipos es fijo y el usuario no debe modificarlo.
PrecauciónSi en el archivo de descripción de equipos se modificanotros nodos y contenidos diferentes a RxPDO, TxPDO yMailbox, no se garantiza el funcionamiento correcto delequipo.
5.8.2 Configuración de PDO de recepción en el nodo RxPDO
El nodo RxPDO sirve para determinar la asignación de losPDO de recepción y su asignación a un canal del Sync Manager. Ejemplo de una entrada típica del archivo de descripción de equipos para el controlador del motor CMMP−AS:
<RxPDO Fixed="1" Sm="2"><Index>#x1600</Index><Name>Outputs</Name><Entry>
<Index>#x6040</Index><SubIndex>0</SubIndex><BitLen>16</BitLen><Name>Controlword</Name><DataType>UINT</DataType>
</Entry><Entry>
<Index>#x6060</Index><SubIndex>0</SubIndex><BitLen>8</BitLen><Name>Mode_Of_Operation</Name><DataType>USINT</DataType>
</Entry></RxPDO>
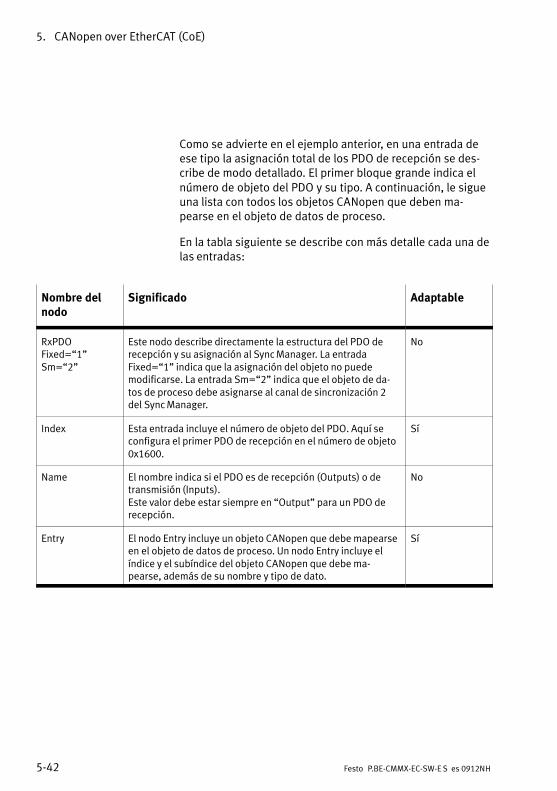
5. CANopen over EtherCAT (CoE)
5−42 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Como se advierte en el ejemplo anterior, en una entrada deese tipo la asignación total de los PDO de recepción se des�cribe de modo detallado. El primer bloque grande indica elnúmero de objeto del PDO y su tipo. A continuación, le sigueuna lista con todos los objetos CANopen que deben ma�pearse en el objeto de datos de proceso.
En la tabla siguiente se describe con más detalle cada una delas entradas:
Nombre delnodo
Significado Adaptable
RxPDO Fixed=�1" Sm=�2"
Este nodo describe directamente la estructura del PDO derecepción y su asignación al Sync Manager. La entrada Fixed=�1" indica que la asignación del objeto no puede modificarse. La entrada Sm=�2" indica que el objeto de da�tos de proceso debe asignarse al canal de sincronización 2del Sync Manager.
No
Index Esta entrada incluye el número de objeto del PDO. Aquí seconfigura el primer PDO de recepción en el número de objeto0x1600.
Sí
Name El nombre indica si el PDO es de recepción (Outputs) o detransmisión (Inputs).Este valor debe estar siempre en �Output" para un PDO derecepción.
No
Entry El nodo Entry incluye un objeto CANopen que debe mapearseen el objeto de datos de proceso. Un nodo Entry incluye elíndice y el subíndice del objeto CANopen que debe ma�pearse, además de su nombre y tipo de dato.
Sí

5. CANopen over EtherCAT (CoE)
5−43Festo P.BE−CMMX−EC−SW−E S es 0912NH
El orden y la asignación de cada uno de los objetos CANopenpara el PDO coincide con el orden en que han sido introduci�dos en el archivo de descripción de equipos mediante lasentradas �Entry". En la tabla siguiente se muestran todos lospuntos de un nodo �Entry":
Nombre delnodo
Significado Adaptable
Index Esta entrada indica el índice del objeto CANopen que debemapearse en el objeto de datos de proceso.
Sí
Subindex Esta entrada indica el subíndice del objeto CANopen quedebe mapearse.
Sí
BitLen Esta entrada indica en bits el tamaño del objeto que debemapearse. Esta entrada debe coincidir siempre con el tipo deobjeto que debe mapearse. Permitidos: 8 b/16 b/32 b.
Sí
Name Esta entrada indica el nombre, en forma de cadena de carac�teres, del objeto que debe mapearse.
Sí
Data Type Esta entrada indica el tipo de datos del objeto que debe ma�pearse. El tipo de datos de cada uno de los objetos CANopenpuede consultarse en el manual de CANopen para el contro�lador de motor CMMP.
Sí
5.8.3 Configuración del PDO de transmisión en el nodo TxPDO
El nodo TxPDO sirve para determinar la asignación de losPDO de transmisión y su asignación a un canal del Sync Manager. La configuración es igual a la de los PDO de recep�ción descrita en la sección 5.8.2 �Configuración de PDO derecepción en el nodo RxPDO". La única diferencia es que elnodo �Name" del PDO debe ajustarse a �Inputs" en vez de a �Outputs".

5. CANopen over EtherCAT (CoE)
5−44 Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.8.4 Órdenes de inicialización a través del nodo �Mailbox"
El nodo �Mailbox" del archivo de descripción de equipossirve para describir objetos CANopen a través del master enel slave durante la fase de inicialización. Las órdenes y losobjetos que deban describirse aquí se determinan medianteentradas especiales. En dichas entradas se determina latransición de fase en la que debe describirse este valor. Además, esta entrada incluye el número de objeto CANopen(índice y subíndice), el valor de datos que debe escribirse yun comentario.
Formato de una entrada típica:
<InitCmd><Transition>PS</Transition><Index#x6060</Index><SubIndex>0</SubIndex><Data>03</Data><Comment>velocity mode</Comment>
</InitCmd>
En el ejemplo anterior, el modo de funcionamiento en el objeto CANopen �modes_of_operation" se ajusta a �velocitymode" (regulación de la velocidad) durante la transición deestado PS de �Pre−Operational" a �Safe Operational". Signifi�cado de los subnodos:
Nombre delnodo
Significado Adaptable
Transition Nombre de la transición de estado en la que debe ejecutarseeste comando (véase el capítulo 6.2 �Máquina de estado decomunicación").
Sí
Index Índice del objeto CANopen que debe escribirse. Sí
Subindex Subíndice del objeto CANopen que debe escribirse. Sí
Data Valor de datos que debe escribirse en forma de valor hexadecimal.
Sí
Comment Comentario relativo a la orden. Sí

5. CANopen over EtherCAT (CoE)
5−45Festo P.BE−CMMX−EC−SW−E S es 0912NH
PrecauciónEn un archivo de descripción de equipos para el controla�dor de motor CMMP−AS ya existen entradas en esta sec�ción. Es obligatorio mantener estas entradas y el usuariono debe modificarlas.

5. CANopen over EtherCAT (CoE)
5−46 Festo P.BE−CMMX−EC−SW−E S es 0912NH
5.9 Sincronización (Distributed Clocks)
En EtherCAT, la sincronización temporal se efectúa a través delos denominados �relojes distribuidos" (Distributed Clocks).Cada slave EtherCAT incluye un reloj de tiempo real que elmaster sincroniza en todos los slaves durante la fase de ini�cialización. A continuación, los relojes se atrasan en todos losslaves durante el funcionamiento.
De este modo existe una base temporal unificada en todo elsistema a la que cada uno de los slaves puede sincronizarse.Los telegramas de sincronización diseñados para este fin enCANopen, se eliminan en CoE.
El FPGA ESC20 utilizado en el controlador del motor CMMP−AS soporta los relojes distribuidos. Ello permite sin�cronizar el tiempo con gran exactitud. El tiempo de ciclo de latrama EtherCAT debe adaptarse exactamente al tiempo deciclo tp del interpolador interno del regulador. Si es necesa�rio, el tiempo del interpolador debe adaptarse mediante elobjeto incluido en el archivo de descripción de equipos.
En la última implementación también es posible una recep�ción síncrona de datos de PDO sin relojes distribuidos y unasincronización de los PLL internos del regulador a las tramassíncronas de EtherCAT. Para ello, el firmware utiliza la llegadade la trama EtherCAT como base temporal.
Restricciones:
� El master debe poder enviar las tramas EtherCAT con unainestabilidad muy reducida.
� El tiempo de ciclo de la trama EtherCAT debe adaptarseexactamente al tiempo de ciclo tp del interpolador internodel regulador.
� La Ethernet debe estar reservada en exclusiva para latrama EtherCAT. Si es necesario, otros telegramas debensincronizarse con el barrido y no deben bloquear el bus.

Puesta en funcionamiento
6−1Festo P.BE−CMMX−EC−SW−E S es 0912NH
Capítulo 6

6. Puesta en funcionamiento
6−2 Festo P.BE−CMMX−EC−SW−E S es 0912NH
13. Puesta en funcionamiento 6−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Introducción 6−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Requisitos previos 6−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Nota importante 6−5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4 Paso a paso 6−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.1 Configuración con FCT 6−6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Configuración en un PLC de Beckhoff 6−9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.1 Configuración de los datos de proceso 6−13 . . . . . . . . . . . . . . . . . . . . . .

6. Puesta en funcionamiento
6−3Festo P.BE−CMMX−EC−SW−E S es 0912NH
6.1 Introducción
En este capítulo presentamos un ejemplo de configuración deun CMMP−AS para utilizar con un PLC de Beckhoff en una redEtherCAT.
Para la parametrización se han utilizado los componentessiguientes:
� CMMP−AS−C2−3A: servocontrolador.
� CAMC−EC: módulo EtherCAT para el CMMP−AS.
� EMMS−AS−55−S−TS: servomotor.
� Beckhoff CX1020−0113: PLC de Beckhoff.
� Beckhoff CX1100−0004: unidad de alimentación de Beckhoff para el PLC.
� Beckhoff EK1110: módulo de expansión EtherCAT deBeckhoff.
� Patch cable CAT5e de Ethernet.
6. Puesta en funcionamiento
6−4 Festo P.BE−CMMX−EC−SW−E S es 0912NH
6.2 Requisitos previos
� PC con Windows 2000/XP/Vista.
� Framework FCT instalado (versión 1.1.5.120).
� Plugin FCT instalado para CMMP−AS (versión1.2.0.5xx).
� TwinCAT de Beckhoff instalado (probado con TwinCATv2.10.0, compilación 1340).
� Archivo de descripción XML para el CMMP−AS.
� CMMP−AS−...* Servocontrolador.
� EMMS−AS−... * Servomotor. Con NEBM−...* Cables de motor y encoder.
� Módulo EtherCAT CAMC−EC.
� Unidad de alimentación de 24 V DC.
� Cables para la alimentación de potencia*.
*) Los componentes dependen de la aplicación.

6. Puesta en funcionamiento
6−5Festo P.BE−CMMX−EC−SW−E S es 0912NH
6.3 Nota importante
Asegúrese de que en el sistema de destino (PLC) esté insta�lada la versión 2.10 (compilación 1328) como mínimo. De locontrario, la descarga automática de la configuración de PDOno funciona.
Para obtener la versión más reciente para su PLC, póngase encontacto con la asistencia técnica de Beckhoff o consulte lapágina de Internet ftp://ftp.beckhoff.com/Software/embPC−Control/
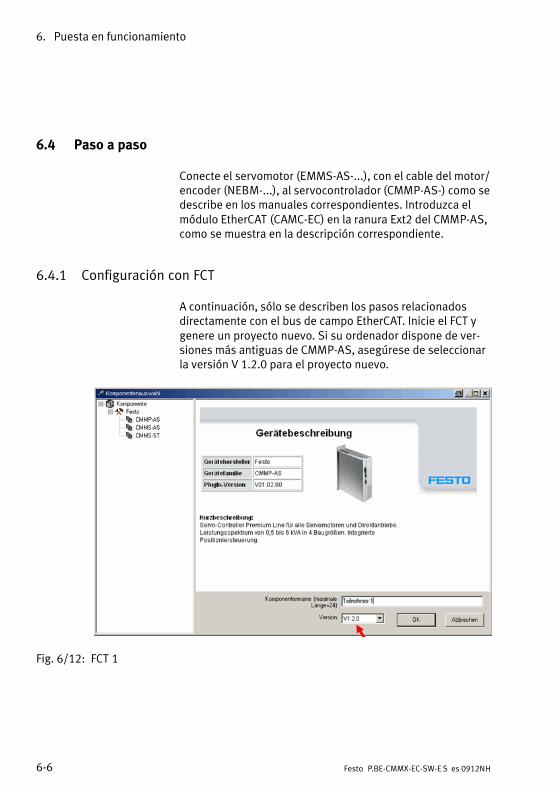
6. Puesta en funcionamiento
6−6 Festo P.BE−CMMX−EC−SW−E S es 0912NH
6.4 Paso a paso
Conecte el servomotor (EMMS−AS−...), con el cable del motor/encoder (NEBM−...), al servocontrolador (CMMP−AS−) como sedescribe en los manuales correspondientes. Introduzca elmódulo EtherCAT (CAMC−EC) en la ranura Ext2 del CMMP−AS,como se muestra en la descripción correspondiente.
6.4.1 Configuración con FCT
A continuación, sólo se describen los pasos relacionadosdirectamente con el bus de campo EtherCAT. Inicie el FCT ygenere un proyecto nuevo. Si su ordenador dispone de ver�siones más antiguas de CMMP−AS, asegúrese de seleccionarla versión V 1.2.0 para el proyecto nuevo.
Fig.�6/12: FCT 1

6. Puesta en funcionamiento
6−7Festo P.BE−CMMX−EC−SW−E S es 0912NH
Seleccione �CAMC−EC: EtherCAT" de la ranura�2 en la página�Configuration".
Fig.�6/13: FCT 2
En la página �Application Data", la interface de control Ether�CAT está seleccionada automáticamente y no debe modifi�carse.
En la página �FieldBus" puede ajustarse el perfil de datosdeseado (CANopen DS402 o Festo FHPP). En la segunda fichade la página del bus de campo puede activarse también�Factor Group". De este modo, los valores de posición, veloci�dad y aceleración se convierten a unidades normales. Si estaopción no está activada, los valores se indican o se leen enincrementos.
Fig.�6/14: FCT 3

6. Puesta en funcionamiento
6−8 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Una vez ajustados todos los parámetros necesarios para laaplicación, realice una descarga. Con esta operación se trans�miten los datos del FCT al CMMP−AS. A continuación guardelos datos con la función �Save", para guardar en el equipo losdatos transmitidos. Desconecte la fuente de alimentación dela unidad lógica (24 V) y vuélvala a conectar para reiniciar(Reboot).

6. Puesta en funcionamiento
6−9Festo P.BE−CMMX−EC−SW−E S es 0912NH
6.5 Configuración en un PLC de Beckhoff
En este punto sólo se describe la conexión del hardware delCMMP al PLC de Beckhoff. Es decir, antes de llevar a caboestos pasos, ya debe haberse creado un programa de apli−cación con �TwinCAT PLC Control".
Antes de comenzar, copie el archivo de descripción de equi�pos XML (Festo_CMMP−AS_Vx.xml) en la carpeta de insta−lación del software TwinCAT. Ésta suele denominarse �C:TwinCATIoEtherCAT".
A continuación, inicie el TwinCAT System Manager y cree unaconfiguración nueva. Pulse el botón �Choose Target" (enSYSTEM − Configuration) para seleccionar el PLC que repre�senta el master EtherCAT.
Fig.�6/15: TwinCAT 1

6. Puesta en funcionamiento
6−10 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Haga clic con el botón derecho del ratón sobre el punto �PLC−Configuration" para leer el programa de aplicación.
Fig.�6/16: TwinCAT 2
Inicie el PLC en modo de configuración.
Fig.�6/17: Modo de configuración 1

6. Puesta en funcionamiento
6−11Festo P.BE−CMMX−EC−SW−E S es 0912NH
Si el PLC se inicia en modo de configuración, haga clic con elbotón derecho del ratón en los equipos E/S para buscar to�dos los equipos conectados al PLC (p. ej., los master de busde campo).
Fig.�6/18: Modo de configuración 2
Al finalizar el escaneo, aparece una ventana con todos losequipos encontrados.
Fig.�6/19: Relación de los equipos encontrados
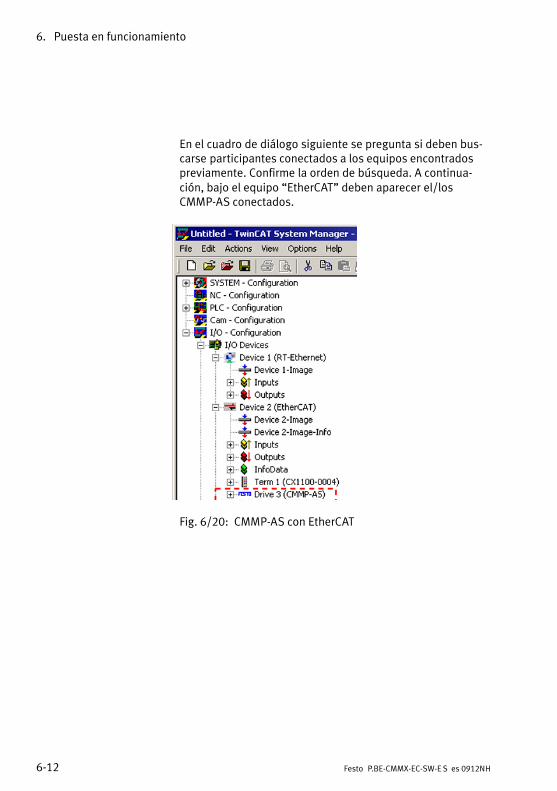
6. Puesta en funcionamiento
6−12 Festo P.BE−CMMX−EC−SW−E S es 0912NH
En el cuadro de diálogo siguiente se pregunta si deben bus�carse participantes conectados a los equipos encontradospreviamente. Confirme la orden de búsqueda. A continua�ción, bajo el equipo �EtherCAT" deben aparecer el/los CMMP−AS conectados.
Fig.�6/20: CMMP−AS con EtherCAT

6. Puesta en funcionamiento
6−13Festo P.BE−CMMX−EC−SW−E S es 0912NH
6.5.1 Configuración de los datos de proceso
FHPP de Festo
En la lista, seleccione el CMMP−AS que debe operar a travésdel perfil FHPP y vaya a la ficha �Process Data".
Fig.�6/21: Datos de proceso
En los ajustes predeterminados del archivo de descripción deequipos XML, el módulo 0x0001 está activado en la asigna�ción de PDO para el canal de salida y el módulo 0x0010 estáactivado en la asignación de PDO para el canal de entrada delSync Manager. Estos módulos (0x0001 y 0x0010) permitenutilizar el CMMP−AS a través de FHPP.
Si desea utilizar además el FPC (Festo Parameter Channel) a fin de regular otros parámetros para un funcionamientoposterior, debe activar también el módulo 0x0002 del canalde salida y el módulo 0x0010 del canal de entrada del Sync Manager.
No modifique los ajustes del campo �Download" (asignaciónde PDO activada, configuración de PDO desactivada).
A continuación, enlace las variables activadas con las varia�bles del programa de PLC conectado anteriormente.

6. Puesta en funcionamiento
6−14 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Fig.�6/22: Asignación de variables
CANopen DS402
En la lista, seleccione el CMMP−AS que debe utilizar el perfilCANopen DS402 y vaya a la ficha �Process Data".
Fig.�6/23: Datos de proceso

6. Puesta en funcionamiento
6−15Festo P.BE−CMMX−EC−SW−E S es 0912NH
Como los módulos para FHPP están activados automática�mente en los ajustes predeterminados del archivo de descrip�ción de equipos XML, a continuación debe modificar la asig�nación de PDO a fin de desbloquear los módulos para elfuncionamiento con DS402.
Desactive el módulo 0x0001 en la asignación de PDO del ca�nal de salida y el módulo 0x0010 en el canal de entrada delSync Manager.
Ahora pueden activarse los módulos 0x1600 y 0x1601 para elcanal de salida y los módulos 0x1A00 y 0x1A01 para el canalde entrada. Los módulos para FHPP se bloquean para evitaruna inconsistencia de los datos.
Fig.�6/24: Asignación de PDO 1
Es imperativo modificar los ajustes el campo �Download"para que los datos PDO se descarguen automáticamente(asignación de PDO activada, configuración de PDO activada).
Fig.�6/25: Asignación de PDO 2

6. Puesta en funcionamiento
6−16 Festo P.BE−CMMX−EC−SW−E S es 0912NH
A continuación, enlace las variables activadas con las varia�bles del programa de PLC conectado anteriormente.
Fig.�6/26: Asignación de variables
Funciones de servicio técnico y mensajes de fallo
7−1Festo P.BE−CMMX−EC−SW−E S es 0912NH
Capítulo 7

7. Funciones de servicio técnico y mensajes de fallo
7−2 Festo P.BE−CMMX−EC−SW−E S es 0912NH
14. Funciones de servicio técnico y mensajes de fallo 7−1 . . . . . . . . . . . . . . . . . . .
7.1 Mensajes de modo de funcionamiento y de fallo 7−3 . . . . . . . . . . . . . . . . . . . . . .
7.1.1 Mensajes de error 7−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

7. Funciones de servicio técnico y mensajes de fallo
7−3Festo P.BE−CMMX−EC−SW−E S es 0912NH
7.1 Mensajes de modo de funcionamiento y de fallo
7.1.1 Mensajes de error
Cuando se produce un error, el controlador de motor CMMP−AS muestra un mensaje de error en el software de parametri�zación.
Para obtener más información sobre los mensajes de error,consulte el manual de utilización.
En la tabla siguiente se muestran los mensajes de error espe�cíficos de EtherCAT:
Mensaje deerror
Significado Medidas
62−0 EtherCAT − Fallo general de bus Conecte el master EtherCAT. Com�pruebe el cableado.
62−1 EtherCAT − Chip ESC no detectado Fallo de hardware: póngase en con�tacto con la asistencia técnica.
62−2 EtherCAT − Error de protocolo, no hayCoE
Protocolo equivocado. Fallos en el ca�bleado del bus EtherCAT.
62−3 EtherCAT− Error de protocolo, longitudde RPDO SM2 incorrecta
Compruebe la configuración de RPDOdel CMMP y del controlador.
62−4 EtherCAT− Error de protocolo, longitudde TPDO SM3 incorrecta
Compruebe la configuración de TPDOdel CMMP y del controlador.
62−5 EtherCAT − Transmisión síncrona inco�rrecta
Compruebe la configuración del mas�ter. La transmisión síncrona no es es�table.
63−0 No hay un chip ESC20 EtherCAT Fallo de hardware: póngase en con�tacto con la asistencia técnica.
63−1 Datos erróneos en el bus EtherCAT Compruebe el cableado.

7. Funciones de servicio técnico y mensajes de fallo
7−4 Festo P.BE−CMMX−EC−SW−E S es 0912NH
Mensaje deerror
MedidasSignificado
63−2 Los datos TPDO no se han leído La velocidad de envío de los datos esmayor de la que es capaz de procesarel controlador del motor. Reduzca eltiempo de ciclo del bus EtherCAT.
63−3 Al iniciar el EtherCAT no se encontróningún hardware SYNC (DistributedClocks). El firmware se sincroniza a latrama de EtherCAT.
Si es necesario, compruebe que elmaster soporta la característica �Distributed Clocks".De lo contrario:asegúrese de que las tramas EtherCATno sufran interferencias de otras tra�mas cuando se utilice el modo de po�sición de interpolación (interpolatedposition mode").
Tab.�7/7: Mensajes de error

Apéndice técnico
A−1Festo P.BE−CMMX−EC−SW−E S es 0912NH
Apéndice A

A. Apéndice técnico
A−2 Festo P.BE−CMMX−EC−SW−E S es 0912NH
B. Apéndice técnico A−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas A−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

A. Apéndice técnico
A−3Festo P.BE−CMMX−EC−SW−E S es 0912NH
A.1 Especificaciones técnicas
Margen Valores
Margen de temperatura de almacenamiento −25 °C a +75 °C
Margen de temperatura de funcionamiento 0 °C a 50 °C
Humedad del aire 0 a 90% sin condensación
Altura de montaje Hasta 1000 m sobre el nivel del mar
Dimensiones exteriores (LxPxA) Aprox. 92 x 65 x 19 mm
Peso Aprox. 55 g
Ranura Sólo ranura Ext2
Interface EtherCAT, nivel de señal 0 a 2,5 V DC
Interface EtherCAT, tensión diferencial 1,9 a 2,1 V DC