CONTROL-AUTOMATICO-villagran (4).pdf
88
CONTROL AUTOMATICO Institución: Escuela Superior Politécnica De Chimborazo Facultad: Mecánica Escuela: Ingeniería Automotriz Carrera: Ingeniería Automotriz Área académica: CONTROL AUTOMATICO Asignatura: CONTROL AUTOMATICO DOCENTE ING. JAVIER VILLAGRAN CACERES Riobamba – Ecuador 2015
Transcript of CONTROL-AUTOMATICO-villagran (4).pdf

CONTROL AUTOMATICO Institución: Escuela Superior Politécnica De Chimborazo
Facultad: Mecánica
Escuela: Ingeniería Automotriz
Carrera: Ingeniería Automotriz
Área académica: CONTROL AUTOMATICO
Asignatura: CONTROL AUTOMATICO
DOCENTE ING. JAVIER VILLAGRAN CACERES
Riobamba – Ecuador
2015

“Saber para Ser”
CONTROL AUTOMATICO
Ejercicio 1
t<0)
𝑖𝑖𝑖𝑖 = −15𝐴𝐴𝐴𝐴𝐴𝐴
−100 + 20𝑖𝑖 + 0,5𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
= 0
100 = 20𝑖𝑖 + 0,5𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑

“Saber para Ser”
200 = 40𝑖𝑖 +𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
200 − 40𝑖𝑖 =𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
� 𝑑𝑑𝑑𝑑 = �𝑑𝑑𝑖𝑖
200 − 400𝑖𝑖
𝑖𝑖
𝑖𝑖𝑖𝑖
𝑡𝑡
0
𝑑𝑑 = −1
40ln (200 − 400𝑖𝑖) � 𝑖𝑖𝑖𝑖𝑖𝑖
−40𝑑𝑑 = ln(200 − 40𝑖𝑖) − ln(200 − 40𝑖𝑖𝑖𝑖)
−40𝑑𝑑 = ln �200 − 40𝑖𝑖
200 − 40𝑖𝑖𝑖𝑖�
𝑒𝑒−40𝑡𝑡 =200 − 40𝑖𝑖
200 − 40𝑖𝑖𝑖𝑖
(200 − 40𝑖𝑖)𝑒𝑒−40𝑡𝑡 = 200 − 40𝑖𝑖
(200 − 40𝑖𝑖)𝑒𝑒−40𝑡𝑡 − 200 = −40𝑖𝑖
𝑖𝑖 =20040
− �20040
−40𝑖𝑖𝑖𝑖40
� 𝑒𝑒−40𝑡𝑡
𝑖𝑖 = 5 − (5 − 𝑖𝑖𝑖𝑖)𝑒𝑒−40𝑡𝑡
𝑖𝑖 = 5 − (20)𝑒𝑒−40𝑡𝑡

“Saber para Ser”
𝑖𝑖 = 𝑖𝑖1 + 𝑖𝑖2 + 𝑖𝑖3
𝑖𝑖 =𝑣𝑣𝑅𝑅
+ 𝐶𝐶𝑑𝑑𝑣𝑣𝑑𝑑𝑑𝑑
+1𝐿𝐿�𝑉𝑉 𝑑𝑑𝑑𝑑
𝑓𝑓 − 𝑓𝑓𝑓𝑓 − 𝑓𝑓𝑓𝑓 = 𝐴𝐴𝑚𝑚
𝑓𝑓 − 𝑓𝑓𝑘𝑘 − 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
= 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
TRANSFORMADA DE LA PLACE

“Saber para Ser”
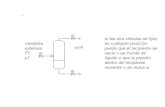
En el circuito mostrado en la figura determine 𝑖𝑖2 si V(t) = 132 u(t)V ; 𝑖𝑖1 (t)V=0 ; 𝑖𝑖2 (0)=0
132 = 5𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖 + 30 (𝑖𝑖1 − 𝑖𝑖2)
0= 6𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖 + 12𝑖𝑖2 + 30 (𝑖𝑖1 − 𝑖𝑖2)
132 = 5𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖 + 30 𝑖𝑖1 − 30𝑖𝑖2
0= 6𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖 + 42𝑖𝑖1 − 30𝑖𝑖1)
30𝑖𝑖1 = 6𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖 + 42𝑖𝑖2
5𝑖𝑖1 = 1𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖 + 7𝑖𝑖2 → 5𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖 = 𝑑𝑑2𝑖𝑖2𝑑𝑑𝑡𝑡2
+ 6𝑑𝑑𝑡𝑡𝑑𝑑2𝑖𝑖2
132 = 𝑑𝑑𝑖𝑖12
𝑑𝑑𝑡𝑡2+ 7𝑑𝑑𝑡𝑡
𝑑𝑑𝑖𝑖2 + 1𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖2 + 42𝑖𝑖2 − 30𝑖𝑖2
𝐿𝐿{132} = 𝐿𝐿{𝑑𝑑𝑖𝑖12
𝑑𝑑𝑡𝑡2} + 𝐿𝐿{13𝑑𝑑𝑡𝑡
𝑑𝑑𝑖𝑖2} + 𝐿𝐿{12𝑖𝑖2}
132𝑆𝑆
= 𝑆𝑆2𝐼𝐼2(𝑆𝑆) + 13𝑆𝑆𝐼𝐼2 + 12𝐼𝐼2(𝑆𝑆)
132𝑆𝑆
= 𝐼𝐼2(𝑆𝑆)(𝑆𝑆213𝑆𝑆 + 12)
𝐼𝐼2(𝑆𝑆) =132
𝑆𝑆(𝑆𝑆2 + 13𝑆𝑆 + 12)
𝐼𝐼2(𝑆𝑆) =132
𝑆𝑆(𝑆𝑆 + 12)(𝑆𝑆 + 1) =𝐴𝐴𝑆𝑆
+ 𝐵𝐵
𝑆𝑆 + 12+
𝐶𝐶𝑆𝑆 + 1
�𝐴𝐴 + 𝐵𝐵 + 𝐶𝐶 = 0
13𝐴𝐴 + 𝐵𝐵 + 12𝐶𝐶 = 012𝐴𝐴 = 132
𝐴𝐴 =13212
𝐵𝐵 = 1 𝐶𝐶 = −12

“Saber para Ser”
𝐼𝐼2(𝑆𝑆) =11𝑆𝑆
+ 1
𝑆𝑆 + 12−
12𝑆𝑆 + 1
𝐿𝐿−1{ 𝐼𝐼2(𝑆𝑆)} = 𝐿𝐿−1{11𝑆𝑆
} + 𝐿𝐿−1{ 1
𝑆𝑆 + 12} − 𝐿𝐿−1{
12𝑆𝑆 + 1
}
𝑖𝑖2(𝑑𝑑) = 11 + 𝑒𝑒−12𝑡𝑡 − 12𝑒𝑒−𝑡𝑡
En el circuito mostrado en la figura calcular la ecuacion que represente al voltaje del condensador en funcion del tiempo.
𝑑𝑑 < 0)
𝑉𝑉0 =50(20)
50= 20𝑉𝑉
𝑑𝑑 > 0)
𝑖𝑖 = 𝑉𝑉𝑅𝑅 + 𝑖𝑖𝐶𝐶
5 = 𝑖𝑖𝑅𝑅 + 𝑖𝑖𝐶𝐶

“Saber para Ser”
5 =𝑉𝑉𝐶𝐶12
+ 0.01𝑑𝑑𝑉𝑉𝐶𝐶𝑑𝑑𝑑𝑑
(t) 500 = 8.33𝑉𝑉𝐶𝐶 + 𝑑𝑑𝑉𝑉𝐶𝐶𝑑𝑑𝑡𝑡
(S) 𝐿𝐿{500} = 8.33𝐿𝐿{𝑉𝑉𝐶𝐶} + 𝐿𝐿 �𝑑𝑑𝑉𝑉𝐶𝐶𝑑𝑑𝑡𝑡�
500𝑆𝑆
= 8.33𝑉𝑉(𝑠𝑠)+𝑠𝑠𝑉𝑉(𝑠𝑠) − 20
500𝑆𝑆
+ 20 =V(s) (8.33+s)
𝑉𝑉(𝑠𝑠) = 500+20𝑠𝑠𝑠𝑠(8.33+𝑠𝑠)
𝑉𝑉(𝑠𝑠) = 𝐴𝐴𝑠𝑠
+ 𝐵𝐵𝑠𝑠+8.33
A+B=20
8.33A=500
A=5008.33
= 60.02
B=20-60.02=-40.02
𝑉𝑉(𝑠𝑠) = 60.02𝑠𝑠
− 40.02𝑠𝑠+8.33
𝐿𝐿−1{𝑉𝑉(𝑠𝑠)} = 𝐿𝐿−1{60.02𝑠𝑠
} - 𝐿𝐿−1 { 40.02𝑠𝑠+8.33
}
𝑉𝑉𝐶𝐶=60.02 − 40.02𝑒𝑒−8.33𝑡𝑡
El interruptor del circuito mostrado en la figura a permanecido durante mucho tiempo se abre t=0 encuentre Vc(t) para todo t˃0.

“Saber para Ser”
−12 + 𝑖𝑖𝑖𝑖 + 5𝑖𝑖0 = 0
−12 = −6𝑖𝑖0
𝑖𝑖0 = 2𝐴𝐴
𝑑𝑑 < 0
𝑉𝑉𝑖𝑖 =12(5)
6= 10𝑉𝑉
𝑑𝑑 > 0
𝑉𝑉 = 𝑉𝑉𝑅𝑅 + 𝑉𝑉𝐿𝐿 + 𝑉𝑉𝐶𝐶
12 = 1𝑖𝑖 + 0.5𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
+12� 𝑖𝑖𝑑𝑑𝑑𝑑
𝐿𝐿{12} = 𝐿𝐿{𝑖𝑖} + 𝐿𝐿{0,5𝑑𝑑𝑡𝑡𝑑𝑑𝑖𝑖 } + 𝐿𝐿{12 ∫ 𝑖𝑖𝑑𝑑𝑑𝑑}
12𝑆𝑆
= 𝐼𝐼(𝑆𝑆) + 0,5[(𝑆𝑆𝐼𝐼(𝑆𝑆) − 2)] +12�𝐼𝐼(𝑆𝑆)𝑆𝑆� +
12�� 𝑖𝑖𝑑𝑑𝑑𝑑
𝑡𝑡
0
�1𝑆𝑆

“Saber para Ser”
12𝑆𝑆
= 𝐼𝐼(𝑆𝑆) + 0,5[(𝑆𝑆𝐼𝐼(𝑆𝑆) − 1)] +12�𝐼𝐼(𝑆𝑆)𝑆𝑆� +
10𝑆𝑆
12𝑆𝑆
+ 1 −10𝑆𝑆
= 𝐼𝐼(𝑆𝑆) ��1 +12𝑆𝑆 +
12𝑆𝑆��
𝐼𝐼(𝑆𝑆) = 2+𝑠𝑠𝑆𝑆(1+12𝑆𝑆+
12𝑆𝑆)
= 2+𝑠𝑠
𝑆𝑆(2𝑆𝑆+𝑆𝑆2+1
2𝑆𝑆 )
𝐼𝐼(𝑆𝑆) =4
(𝑆𝑆 + 1)2+
2𝑆𝑆(𝑆𝑆 + 1)2
𝐿𝐿−1{𝐼𝐼(𝑆𝑆)} = 𝐿𝐿−1{{4
(𝑆𝑆 + 1)2} + 𝐿𝐿−1{
2𝑆𝑆(𝑆𝑆 + 1)2
}
𝑖𝑖(𝑑𝑑) = 4𝑑𝑑𝑒𝑒−𝑡𝑡 + 2𝑒𝑒−𝑡𝑡 − 2𝑑𝑑𝑒𝑒−𝑡𝑡
𝑖𝑖(𝑑𝑑) = 2𝑑𝑑𝑒𝑒−𝑡𝑡 + 2𝑒𝑒−𝑡𝑡
CONTROL
SISTEMA DE LASO CERRADO
V. referencia
+
-
SISTEMA DE LASO ABIERTO
control actuador planta
sensor
remojo lavado enjuague secado

“Saber para Ser”
Sistema de control de laso cerrado
Nivel de referencia
Horno
T deseada T horno
Disenar un sistema de climatizacion de un automovil con temperatura ambiente
CPU Rele Horno
sensor

“Saber para Ser”
Ley de Kirchopt
Vi=Ri+𝑉𝑉0 𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅(𝐼𝐼) + 𝑉𝑉0(𝑆𝑆)
𝑉𝑉0 = 1𝑐𝑐 ∫ 𝑖𝑖𝑑𝑑𝑑𝑑 𝑉𝑉0(𝑠𝑠) = 𝐼𝐼(𝑠𝑠)
𝐶𝐶𝑠𝑠
𝐼𝐼(𝑠𝑠) = 𝑉𝑉𝑖𝑖(𝑠𝑠)−𝑉𝑉0(𝑠𝑠)𝑅𝑅
FRECUENCIA (S)
TIEMPO (t)
𝑖𝑖 =𝑉𝑉𝑖𝑖 − 𝑉𝑉0𝑅𝑅
=
𝑉𝑉0 =1𝑐𝑐� 𝑖𝑖𝑑𝑑𝑑𝑑

“Saber para Ser”

“Saber para Ser”
MODELACIÓN MATEMÁTICA DE LOS SISTEMAS FÍSICOS
Es describir el comportamiento de una manera real posible del sistema
Considerar las variables de entrada y salida
𝑖𝑖𝑖𝑖 = 𝑖𝑖𝐶𝐶 + 𝑖𝑖𝐵𝐵
𝛽𝛽 =𝑖𝑖𝐶𝐶𝑖𝑖𝐵𝐵
𝑖𝑖𝐶𝐶 = 𝛽𝛽𝑖𝑖𝐵𝐵
𝑖𝑖𝑖𝑖 = 𝛽𝛽𝑖𝑖𝐵𝐵 + 𝑖𝑖𝐵𝐵
𝑖𝑖𝑖𝑖 = 𝑖𝑖𝐵𝐵(𝛽𝛽 − 1)
𝑉𝑉𝑉𝑉𝑖𝑖 = 𝑖𝑖𝑖𝑖 ∗ 𝑅𝑅𝑖𝑖
Impedancia de entrada
𝑍𝑍𝑖𝑖 =𝑉𝑉𝑉𝑉𝑖𝑖𝑖𝑖𝐵𝐵
=𝑖𝑖𝑖𝑖 ∗ 𝑉𝑉𝑉𝑉𝑖𝑖
𝑖𝑖𝐵𝐵
𝑍𝑍𝑖𝑖 =𝑖𝑖𝐵𝐵 ∗ (𝛽𝛽 + 1)𝑖𝑖
𝑖𝑖𝐵𝐵
𝑍𝑍𝑖𝑖 = 𝛽𝛽 ∗ 𝑅𝑅𝑖𝑖

“Saber para Ser”
𝑓𝑓 − 𝑓𝑓𝑓𝑓 − 𝑓𝑓𝑓𝑓 = 𝐴𝐴𝑚𝑚
𝑓𝑓 − 𝑓𝑓𝑘𝑘 − 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
= 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑
𝑓𝑓 = 𝑓𝑓𝑘𝑘 + 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
+ 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑

“Saber para Ser”
−𝑓𝑓 + 𝑓𝑓𝑓𝑓 + 𝑓𝑓𝑓𝑓 = 𝐴𝐴𝑚𝑚
−𝑓𝑓 + 𝑓𝑓𝑘𝑘 + 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
= 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝑓𝑓 = 𝑓𝑓𝑘𝑘 + 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
− 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
−𝑓𝑓 + 𝑓𝑓𝑓𝑓 + 𝑓𝑓𝑓𝑓 = 𝐴𝐴𝑚𝑚

“Saber para Ser”
−𝑓𝑓 + 𝑓𝑓𝑘𝑘 + 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
= 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝑓𝑓 = 𝑓𝑓𝑘𝑘 + 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
− 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
Caso 1
L.V.K
𝑣𝑣𝑖𝑖 = 𝑅𝑅𝑖𝑖 + 𝐿𝐿 𝑑𝑑𝑖𝑖𝑑𝑑𝑡𝑡
+ 1𝑐𝑐 ∫ 𝑖𝑖𝑑𝑑𝑑𝑑 𝑖𝑖 = 𝑑𝑑𝑑𝑑
𝑑𝑑𝑡𝑡
𝑣𝑣𝑖𝑖 = 𝑅𝑅𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
+ 𝐿𝐿𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
+𝑑𝑑𝑐𝑐
𝑣𝑣𝑖𝑖 =𝑑𝑑𝑐𝑐
+ 𝑅𝑅𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
+ 𝐿𝐿𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
vi F 1/c K L m R b
Caso 2
L.V.K
Flujo
𝒗𝒗 =𝒅𝒅∅𝒅𝒅𝒅𝒅

“Saber para Ser”
𝒊𝒊 = 𝒊𝒊𝒊𝒊 + 𝒊𝒊𝒊𝒊 + 𝒊𝒊𝒊𝒊
𝒊𝒊 =𝒗𝒗𝒊𝒊
+ 𝒊𝒊𝒅𝒅𝒗𝒗𝒅𝒅𝒅𝒅
+𝟏𝟏𝒊𝒊�𝒗𝒗𝒅𝒅𝒅𝒅
𝒊𝒊 =𝒅𝒅∅𝒊𝒊𝒅𝒅𝒅𝒅
+ 𝒊𝒊𝒅𝒅𝟐𝟐∅𝒅𝒅𝒅𝒅𝟐𝟐
+∅𝒊𝒊
𝒊𝒊 =∅𝒊𝒊
+𝒅𝒅∅𝒊𝒊𝒅𝒅𝒅𝒅
+ 𝒊𝒊𝒅𝒅𝟐𝟐∅𝒅𝒅𝒅𝒅𝟐𝟐
Ejercicio
𝑓𝑓 = 𝑓𝑓𝑘𝑘 + 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
− 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
=𝑓𝑓 − 𝑓𝑓𝑘𝑘 − 𝑓𝑓 𝑑𝑑𝑘𝑘/𝑑𝑑𝑑𝑑
𝐴𝐴
𝑣𝑣𝑖𝑖 =𝑑𝑑𝑐𝑐
+ 𝑅𝑅𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
+ 𝐿𝐿𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
𝑑𝑑2𝑑𝑑𝑑𝑑𝑡𝑡2
= 𝑣𝑣𝑖𝑖−𝑑𝑑/𝑐𝑐+𝑅𝑅 𝑑𝑑𝑑𝑑/𝑑𝑑𝑡𝑡𝐿𝐿

“Saber para Ser”
𝒊𝒊 =∅𝒊𝒊
+𝒅𝒅∅𝒊𝒊𝒅𝒅𝒅𝒅
+ 𝒊𝒊𝒅𝒅𝟐𝟐∅𝒅𝒅𝒅𝒅𝟐𝟐
𝒅𝒅𝟐𝟐∅𝒅𝒅𝒅𝒅𝟐𝟐
=𝒊𝒊 − ∅/𝒊𝒊 − (𝒅𝒅∅)/𝒊𝒊𝒅𝒅𝒅𝒅
𝒊𝒊
L-v-K
𝒗𝒗𝒊𝒊 = 𝒊𝒊𝟏𝟏𝒊𝒊 +𝟏𝟏𝒄𝒄𝟏𝟏� 𝒊𝒊𝒅𝒅𝒅𝒅 + 𝒗𝒗𝒗𝒗
𝒗𝒗𝒗𝒗 = 𝒊𝒊𝟐𝟐𝒊𝒊 +𝟏𝟏𝒄𝒄𝟐𝟐� 𝒊𝒊𝒅𝒅𝒅𝒅
𝒊𝒊 =𝒗𝒗𝒊𝒊 − 𝟏𝟏
𝒄𝒄𝟏𝟏 ∫𝒊𝒊𝒅𝒅𝒅𝒅 − 𝒗𝒗𝒗𝒗
𝒊𝒊

“Saber para Ser”
�𝐹𝐹 = 𝐴𝐴.𝑚𝑚
𝑓𝑓𝑒𝑒 − 𝑓𝑓𝑓𝑓 − 𝑓𝑓𝑓𝑓 = 𝐴𝐴.𝑚𝑚
𝑓𝑓𝑒𝑒 − 𝑘𝑘(𝑓𝑓1 − 𝑓𝑓2) − 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
= 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝑓𝑓𝑒𝑒 = 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
+ 𝑘𝑘(𝑓𝑓1 − 𝑓𝑓2) + (𝑀𝑀 + 𝐴𝐴)𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝑓𝑓𝑒𝑒 = 𝐾𝐾𝑒𝑒𝑖𝑖
𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
=𝑓𝑓 − 𝑓𝑓𝑘𝑘 − 𝑘𝑘(𝑓𝑓1 − 𝑓𝑓2)
𝐴𝐴
Diseño en el programa Matlab

“Saber para Ser”
MODELO ELECTROMECANICO
Análisis eléctrico
𝑉𝑉𝑖𝑖 = 𝑅𝑅𝑖𝑖 + 𝐿𝐿𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
+ 𝑉𝑉𝐵𝐵
𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
=𝑉𝑉𝑖𝑖 − 𝑅𝑅𝑖𝑖 − 𝑉𝑉𝐵𝐵
𝐿𝐿
Análisis electromecánico
𝑉𝑉𝑓𝑓 = 𝐾𝐾𝑣𝑣𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
Análisis mecánico
𝑓𝑓𝑒𝑒 − 𝑓𝑓𝑓𝑓 − 𝑓𝑓𝑓𝑓 = (𝑀𝑀 + 𝐴𝐴)𝑚𝑚
𝑓𝑓𝑒𝑒 − 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
− 𝐾𝐾𝑘𝑘 = (𝑀𝑀 + 𝐴𝐴)𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝑓𝑓𝑒𝑒 = 𝐾𝐾𝑒𝑒𝑖𝑖

“Saber para Ser”
𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
=𝑓𝑓 + 𝑓𝑓 𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑 + 𝐾𝐾𝑘𝑘
𝑀𝑀 + 𝐴𝐴
Diseño en el programa Matlab
�𝑀𝑀 = 𝐼𝐼.𝛼𝛼
𝑇𝑇 − 𝑓𝑓𝑓𝑓 = 𝐼𝐼.𝛼𝛼
𝛼𝛼 =𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
𝛼𝛼 =𝑑𝑑2𝜃𝜃𝑑𝑑𝑑𝑑2
𝑇𝑇 − 𝑓𝑓𝑑𝑑 = 𝐼𝐼.𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
𝑇𝑇 = 𝑓𝑓𝜃𝜃 + 𝐼𝐼.𝑑𝑑2𝜃𝜃𝑑𝑑𝑑𝑑2

“Saber para Ser”
𝑉𝑉𝑖𝑖 = 𝑅𝑅𝑖𝑖 + 𝑖𝑖𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
+ 𝑒𝑒𝑓𝑓
𝜏𝜏 = 𝑓𝑓1. 𝑖𝑖
�𝑇𝑇 = 𝐼𝐼.𝛼𝛼
𝑇𝑇 − 𝑓𝑓𝑓𝑓 = 𝐼𝐼.𝛼𝛼
𝑇𝑇 − 𝑓𝑓𝑑𝑑 = 𝐼𝐼.𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
𝑑𝑑 =𝑑𝑑𝜃𝜃𝑑𝑑𝑑𝑑
𝑇𝑇 =𝑓𝑓𝑑𝑑𝜃𝜃𝑑𝑑𝑑𝑑
+𝑑𝑑2𝜃𝜃𝑑𝑑𝑑𝑑2
𝑒𝑒𝑓𝑓 = 𝑓𝑓2.𝑑𝑑
𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
=𝑉𝑉𝑖𝑖 − 𝑅𝑅𝑖𝑖 − 𝑒𝑒𝑓𝑓
𝐿𝐿
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
=𝑇𝑇 − 𝑓𝑓𝑑𝑑
𝐼𝐼
ANALOGIA

“Saber para Ser”
£𝐹𝐹 = 𝐴𝐴.𝑚𝑚
f-fk-fb= 𝐴𝐴.𝑚𝑚
f-kx-bx’=mx”
f=kx-bx’+mx”
V-F) fuerza voltaje
𝑉𝑉 = 𝑅𝑅𝑖𝑖 + 𝐿𝐿𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
+1𝑐𝑐� 𝑖𝑖𝑑𝑑𝑑𝑑
𝑉𝑉 = 𝑅𝑅𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
+ 𝐿𝐿𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
+1𝑐𝑐𝑑𝑑
𝑉𝑉 = 𝑅𝑅𝑑𝑑′ + 𝐿𝐿𝑑𝑑" +1𝑐𝑐𝑑𝑑

“Saber para Ser”
𝑖𝑖 = 𝑖𝑖𝑅𝑅 + 𝑖𝑖𝐶𝐶 + 𝑖𝑖𝐿𝐿
𝑖𝑖 =𝑉𝑉𝑖𝑖𝑅𝑅
+𝐶𝐶𝑑𝑑𝑣𝑣𝑑𝑑𝑑𝑑
+1𝐿𝐿�𝑉𝑉𝑘𝑘𝑑𝑑𝑑𝑑
𝑖𝑖 =1𝑅𝑅𝑑𝑑∅𝑑𝑑𝑑𝑑
+ 𝑐𝑐𝑑𝑑2∅𝑑𝑑𝑑𝑑2
+1𝐿𝐿∅
𝑖𝑖 =1𝑅𝑅∅′ + 𝑐𝑐∅" +
1𝐿𝐿∅
1) 𝑉𝑉 = 𝑅𝑅2𝑖𝑖1 + 1𝑐𝑐2∫ 𝑖𝑖1𝑑𝑑𝑑𝑑 + 𝑉𝑉𝑘𝑘 𝑖𝑖1 = 1
𝑅𝑅2(𝑉𝑉 − 𝑉𝑉𝑘𝑘 − 1
𝐶𝐶1 ∫ 𝑖𝑖1𝑑𝑑𝑑𝑑)
2) 𝑉𝑉𝑘𝑘 = 1𝑐𝑐1∫ 𝑖𝑖2𝑑𝑑𝑑𝑑 + 𝐿𝐿 𝑑𝑑𝑖𝑖2
𝑑𝑑𝑡𝑡
3) 𝑉𝑉𝑘𝑘 = 𝑅𝑅1(𝑖𝑖1 − 𝑖𝑖2) 𝑉𝑉𝑘𝑘 = 𝑅𝑅1 𝑖𝑖1 − 𝑅𝑅1 𝑖𝑖2

“Saber para Ser”

“Saber para Ser”
1) 𝑉𝑉 = 𝑅𝑅𝑖𝑖 + 1𝑐𝑐1 ∫ 𝑖𝑖1 𝑑𝑑𝑑𝑑 + 𝑉𝑉𝑘𝑘
2) 𝑉𝑉𝑘𝑘 = 1𝑐𝑐2 ∫ 𝑖𝑖2 𝑑𝑑𝑑𝑑 + 𝐿𝐿 𝑑𝑑𝑖𝑖2
𝑑𝑑𝑡𝑡
3) 𝑉𝑉𝑘𝑘 = 𝐿𝐿 𝑑𝑑𝑖𝑖1𝑑𝑑𝑡𝑡− 𝐿𝐿 𝑑𝑑𝑖𝑖2
𝑑𝑑𝑡𝑡

“Saber para Ser”
�𝑀𝑀 = 𝐼𝐼.𝛼𝛼
𝑇𝑇 − 𝑓𝑓𝑓𝑓 = 𝐼𝐼.𝛼𝛼
𝛼𝛼 =𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
𝛼𝛼 =𝑑𝑑2𝜃𝜃𝑑𝑑𝑑𝑑2
𝑇𝑇 − 𝑓𝑓𝑑𝑑 = 𝐼𝐼.𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
𝑇𝑇 = 𝑓𝑓𝜃𝜃 + 𝐼𝐼.𝑑𝑑2𝜃𝜃𝑑𝑑𝑑𝑑2
𝑉𝑉𝑖𝑖 = 𝑅𝑅𝑖𝑖 + 𝑖𝑖𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
+ 𝑒𝑒𝑓𝑓
𝜏𝜏 = 𝑓𝑓1. 𝑖𝑖
�𝑇𝑇 = 𝐼𝐼.𝛼𝛼
𝑇𝑇 − 𝑓𝑓𝑓𝑓 = 𝐼𝐼.𝛼𝛼
𝑇𝑇 − 𝑓𝑓𝑑𝑑 = 𝐼𝐼.𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
𝑑𝑑 =𝑑𝑑𝜃𝜃𝑑𝑑𝑑𝑑

“Saber para Ser”
𝑇𝑇 =𝑓𝑓𝑑𝑑𝜃𝜃𝑑𝑑𝑑𝑑
+𝑑𝑑2𝜃𝜃𝑑𝑑𝑑𝑑2
𝑒𝑒𝑓𝑓 = 𝑓𝑓2.𝑑𝑑
𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
=𝑉𝑉𝑖𝑖 − 𝑅𝑅𝑖𝑖 − 𝑒𝑒𝑓𝑓
𝐿𝐿
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
=𝑇𝑇 − 𝑓𝑓𝑑𝑑
𝐼𝐼

“Saber para Ser”
𝑣𝑣𝑖𝑖 = 𝑅𝑅𝑖𝑖 + 𝐿𝐿𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
+ 𝑒𝑒𝑓𝑓
𝑑𝑑𝑖𝑖𝑑𝑑𝑑𝑑
=𝑣𝑣𝑖𝑖 − 𝑅𝑅𝑖𝑖 − 𝑒𝑒𝑓𝑓
𝐿𝐿
𝑓𝑓𝑒𝑒 − 𝑓𝑓𝑓𝑓 − 𝑓𝑓𝑓𝑓 = (𝐴𝐴 + 𝑀𝑀)𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
=𝑓𝑓𝑒𝑒 − 𝑓𝑓𝑘𝑘 − 𝑓𝑓 𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
(𝐴𝐴 + 𝑀𝑀)
FUNCIONES DE TRANFERENCIA
𝐻𝐻(𝑠𝑠) =𝑉𝑉𝑖𝑖(𝑠𝑠)𝑉𝑉𝑖𝑖(𝑠𝑠)
𝑑𝑑)
𝑉𝑉𝑖𝑖 = 𝑅𝑅𝑖𝑖 + 𝑉𝑉𝑖𝑖
𝑉𝑉𝑖𝑖 =1𝑐𝑐� 𝑖𝑖𝑑𝑑𝑑𝑑
𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅𝐼𝐼(𝑠𝑠) + 𝑉𝑉𝑖𝑖(𝑠𝑠)
𝑉𝑉𝑖𝑖(𝑠𝑠) =𝐼𝐼(𝑠𝑠)𝐶𝐶𝑆𝑆

“Saber para Ser”
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅𝑉𝑉𝑖𝑖(𝑠𝑠)𝐶𝐶𝑠𝑠 + 𝑉𝑉𝑖𝑖(𝑠𝑠)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑉𝑉𝑖𝑖(𝑠𝑠)(𝑅𝑅𝐶𝐶𝑠𝑠 + 1)
𝑉𝑉𝑖𝑖(𝑠𝑠)𝑉𝑉𝑖𝑖(𝑆𝑆)
=1
1 + 𝑅𝑅𝐶𝐶𝑆𝑆
𝑑𝑑)
𝑉𝑉𝑖𝑖 = 𝑅𝑅1𝑖𝑖 +1𝑐𝑐1� 𝑖𝑖𝑑𝑑𝑑𝑑 + 𝑉𝑉𝑖𝑖
𝑉𝑉𝑖𝑖 = 𝑅𝑅2𝑖𝑖 +1𝑐𝑐2� 𝑖𝑖𝑑𝑑𝑑𝑑 +
𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅1𝐼𝐼(𝑠𝑠) +𝐼𝐼(𝑠𝑠)𝐶𝐶1𝑆𝑆
+ 𝑉𝑉𝑖𝑖(𝑠𝑠)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅2𝐼𝐼(𝑠𝑠) +𝐼𝐼(𝑠𝑠)𝐶𝐶2𝑆𝑆
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝐼𝐼(𝑠𝑠) �𝑅𝑅2 +1𝐶𝐶2𝑆𝑆
�
𝑉𝑉𝑖𝑖(𝑠𝑠) =𝑉𝑉𝑖𝑖(𝑠𝑠)𝐶𝐶2𝑆𝑆𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅1 �𝑉𝑉𝑖𝑖(𝑠𝑠)𝐶𝐶2𝑆𝑆𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1
� +𝑉𝑉𝑖𝑖(𝑠𝑠)𝐶𝐶2𝑆𝑆
𝐶𝐶1𝑆𝑆(𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1)+ 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
=𝐶𝐶1(𝑅𝑅2𝑆𝑆 + 1)
𝐶𝐶2(𝐶𝐶1𝑅𝑅1𝑆𝑆 + 1) + 𝐶𝐶1(𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1)

“Saber para Ser”
𝑑𝑑)
𝑉𝑉𝑖𝑖 = 𝑅𝑅1𝑖𝑖1 + +𝑉𝑉𝑘𝑘
𝑉𝑉𝑘𝑘 = 𝑅𝑅2𝑖𝑖2 + 𝑉𝑉𝑖𝑖
𝑉𝑉𝑘𝑘 =1𝑐𝑐1�𝑖𝑖1𝑑𝑑𝑑𝑑 −
1𝑐𝑐2�𝑖𝑖2𝑑𝑑𝑑𝑑
𝑉𝑉𝑖𝑖 = +1𝑐𝑐2� 𝑖𝑖2𝑑𝑑𝑑𝑑
S)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅1𝐼𝐼1(𝑠𝑠) + 𝑉𝑉𝑘𝑘
𝑉𝑉𝑘𝑘(𝑠𝑠) = 𝑅𝑅2𝐼𝐼2(𝑠𝑠) + 𝑉𝑉𝑖𝑖
𝑉𝑉𝑘𝑘(𝑠𝑠) =𝐼𝐼1(𝑠𝑠)𝐶𝐶1𝑆𝑆
−𝐼𝐼2(𝑠𝑠)𝐶𝐶2𝑆𝑆
𝑉𝑉𝑖𝑖(𝑠𝑠) =𝐼𝐼2(𝑆𝑆)𝐶𝐶2𝑆𝑆
𝑉𝑉𝑘𝑘(𝑠𝑠) = 𝑉𝑉𝑘𝑘(𝑆𝑆)
𝑅𝑅2𝐼𝐼2(𝑆𝑆) + 𝑉𝑉𝑖𝑖(𝑆𝑆) = 𝐼𝐼1(𝑆𝑆)𝐶𝐶1𝑆𝑆
−𝐼𝐼2(𝑆𝑆)𝐶𝐶2𝑆𝑆
𝑅𝑅2𝐼𝐼2(𝑆𝑆) + 𝑉𝑉𝑖𝑖(𝑆𝑆) +𝐼𝐼2(𝑆𝑆)𝐶𝐶2𝑆𝑆
=𝐼𝐼1(𝑆𝑆)𝐶𝐶1𝑆𝑆
𝐼𝐼2(𝑆𝑆) �𝑅𝑅2 +1𝐶𝐶2𝑆𝑆
� + 𝑉𝑉𝑖𝑖(𝑆𝑆) =𝐼𝐼1(𝑆𝑆)𝐶𝐶1𝑆𝑆
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅1𝐼𝐼1(𝑆𝑆) + 𝑅𝑅2𝐼𝐼2(𝑆𝑆) + 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅1[𝐶𝐶1𝐶𝐶2𝑆𝑆2(𝑅𝑅2 + 1) + 𝐶𝐶1𝑆𝑆]𝑉𝑉𝑖𝑖(𝑆𝑆) + 𝑉𝑉𝑖𝑖(𝑆𝑆)𝐶𝐶2𝑆𝑆𝑅𝑅2 + 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅1[𝐶𝐶1𝐶𝐶2𝑆𝑆2(𝑅𝑅2 + 1) + 𝐶𝐶1𝑆𝑆]𝑉𝑉𝑖𝑖(𝑆𝑆) + 𝑉𝑉𝑖𝑖(𝑆𝑆)𝐶𝐶2𝑆𝑆𝑅𝑅2 + 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑖𝑖𝑉𝑉𝑖𝑖(𝑆𝑆)
=1
𝑅𝑅1𝑅𝑅2𝐶𝐶2𝑆𝑆2 + 𝑅𝑅1𝐶𝐶1𝐶𝐶2𝑆𝑆2 + 𝑅𝑅1𝐶𝐶1𝑆𝑆 + 𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1

“Saber para Ser”
t)
𝑉𝑉𝑖𝑖 = 𝑉𝑉𝐿𝐿 + 𝑉𝑉𝑘𝑘
𝑉𝑉𝑖𝑖 = 𝐿𝐿1𝑑𝑑𝑖𝑖1𝑑𝑑𝑑𝑑
+ 𝑉𝑉𝑘𝑘
𝑉𝑉𝑘𝑘 = 𝐿𝐿2𝑑𝑑𝑖𝑖2𝑑𝑑𝑑𝑑
+ 𝑉𝑉𝑖𝑖
𝑉𝑉𝑘𝑘 = 𝑅𝑅1(𝑖𝑖1 − 𝑖𝑖2) = 𝑅𝑅1𝑖𝑖1 − 𝑅𝑅1𝑖𝑖2
𝑉𝑉𝑘𝑘 = 𝑅𝑅2𝑖𝑖2
S)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝐿𝐿1𝑆𝑆𝐼𝐼1(𝑠𝑠) + 𝑉𝑉𝑘𝑘
𝑉𝑉𝑘𝑘(𝑠𝑠) = 𝐿𝐿2𝑆𝑆𝐼𝐼2(𝑠𝑠) + 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑘𝑘(𝑠𝑠) = 𝑅𝑅1𝐼𝐼1(𝑠𝑠) + 𝑅𝑅1𝐼𝐼2(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑅𝑅2𝐼𝐼2(𝑠𝑠)
𝐼𝐼2(𝑠𝑠) =𝑉𝑉𝑖𝑖(𝑆𝑆)𝑅𝑅2
𝑉𝑉𝑘𝑘(𝑠𝑠) = 𝑉𝑉𝑘𝑘(𝑠𝑠)
𝐿𝐿2𝑆𝑆𝐼𝐼2(𝑆𝑆) + 𝑉𝑉𝑖𝑖(𝑆𝑆) = 𝑅𝑅1𝐼𝐼1(𝑆𝑆) − 𝑅𝑅1𝐼𝐼2(𝑆𝑆)
𝐿𝐿2𝑆𝑆𝐼𝐼2(𝑆𝑆) + 𝑉𝑉𝑖𝑖(𝑆𝑆) + 𝑅𝑅1𝐼𝐼2(𝑆𝑆) = 𝑅𝑅1𝐼𝐼1(𝑆𝑆)
𝐼𝐼2(𝑆𝑆)(𝐿𝐿2𝑆𝑆 + 𝑅𝑅1) + 𝑉𝑉𝑖𝑖(𝑆𝑆) = 𝑅𝑅1𝐼𝐼1(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑅𝑅2
(𝐿𝐿2𝑆𝑆 + 𝑅𝑅1) + 𝑉𝑉𝑖𝑖(𝑆𝑆) = 𝑅𝑅1𝐼𝐼1(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑆𝑆) �𝐿𝐿2𝑆𝑆 + 𝑅𝑅1 + 𝑅𝑅2
𝑅𝑅2𝑅𝑅1� = 𝐼𝐼1(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝐿𝐿1𝑆𝑆𝐼𝐼1(𝑠𝑠) + 𝐿𝐿2𝑆𝑆𝐼𝐼2(𝑠𝑠) + 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝐿𝐿1𝑆𝑆 �𝐿𝐿2𝑆𝑆 + 𝑅𝑅1 + 𝑅𝑅2
𝑅𝑅2𝑅𝑅1�𝑉𝑉𝑖𝑖(𝑆𝑆) + 𝐿𝐿2𝑆𝑆𝐼𝐼2(𝑠𝑠) + 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑠𝑠) =
𝑅𝑅1𝑅𝑅2𝐿𝐿2𝑆𝑆2𝐿𝐿2 + 𝐿𝐿𝐼𝐼𝑆𝑆𝑅𝑅1 + 𝐿𝐿1𝑆𝑆𝑅𝑅2 + 𝑅𝑅1𝐿𝐿2𝑆𝑆 + 𝑅𝑅2𝑅𝑅1

“Saber para Ser”
AMPLIFICADORES OPERACIONALES
𝑖𝑖1 = 𝑖𝑖𝑐𝑐 + 𝑖𝑖2
𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑘𝑘𝑅𝑅1
=𝐶𝐶𝑑𝑑(𝑉𝑉𝑘𝑘 − 𝑉𝑉𝑖𝑖)
𝑑𝑑𝑑𝑑+𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑖𝑖𝑅𝑅2
𝑉𝑉𝑖𝑖𝑅𝑅1
= −𝐶𝐶𝑑𝑑𝑉𝑉𝑖𝑖𝑑𝑑𝑑𝑑
−𝑉𝑉𝑖𝑖𝑅𝑅2
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑅𝑅1
= −𝐶𝐶𝑆𝑆𝑉𝑉𝑖𝑖(𝑆𝑆) −𝑉𝑉𝑖𝑖(𝑆𝑆)𝑅𝑅2
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑅𝑅1
= −𝑉𝑉𝑖𝑖(𝑆𝑆) �𝐶𝐶𝑆𝑆 −1𝑅𝑅2�
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑅𝑅1.𝑅𝑅2
𝑅𝑅2.𝐶𝐶𝑆𝑆 + 1
IMPEDANCIA

“Saber para Ser”
I1=I2
𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑘𝑘𝑍𝑍1
=𝑉𝑉𝑘𝑘 − 𝑉𝑉𝑖𝑖𝑍𝑍2
𝑉𝑉𝑖𝑖𝑍𝑍1
= −𝑉𝑉𝑖𝑖𝑍𝑍2
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑍𝑍2𝑍𝑍1
𝑍𝑍1 = 𝑅𝑅1 +1𝐶𝐶1𝑆𝑆
𝑍𝑍1 =𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1
𝐶𝐶1𝑆𝑆
𝑍𝑍2 =𝑅𝑅2 1
𝐶𝐶2𝑆𝑆𝑅𝑅2 + 1
𝐶𝐶1𝑆𝑆=
𝑅𝑅2𝐶𝐶2𝑆𝑆
𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1𝐶𝐶1𝑆𝑆
𝑍𝑍2 =𝑅𝑅2
𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑍𝑍2𝑍𝑍1
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑅𝑅2
𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1
𝐶𝐶1𝑆𝑆
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑅𝑅2𝐶𝐶1𝑆𝑆
(𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1)(𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1)

“Saber para Ser”
I1=I2
𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑘𝑘𝑍𝑍1
=𝑉𝑉𝑘𝑘 − 𝑉𝑉𝑖𝑖𝑍𝑍2
𝑉𝑉𝑖𝑖𝑍𝑍1
= −𝑉𝑉𝑖𝑖𝑍𝑍2
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑍𝑍2𝑍𝑍1
𝑍𝑍1 = 𝑅𝑅1 +1𝐶𝐶1𝑆𝑆
𝑍𝑍1 =𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1
𝐶𝐶1𝑆𝑆
𝑍𝑍2 = 𝑅𝑅2 +1𝐶𝐶2𝑆𝑆
𝑍𝑍2 =𝑅𝑅2𝐶𝐶2 + 1𝐶𝐶2𝑆𝑆
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑍𝑍2𝑍𝑍1
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑅𝑅2𝐶𝐶2 + 1𝐶𝐶2𝑆𝑆
𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1𝐶𝐶1𝑆𝑆

“Saber para Ser”
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −(𝑅𝑅2𝐶𝐶2 + 1)𝐶𝐶1
(𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1)𝐶𝐶2
I1=I2
𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑘𝑘𝑍𝑍1
=𝑉𝑉𝑘𝑘 − 𝑉𝑉𝑖𝑖𝑍𝑍2
𝑉𝑉𝑖𝑖𝑍𝑍1
= −𝑉𝑉𝑖𝑖𝑍𝑍2
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑍𝑍2𝑍𝑍1
𝑍𝑍1 =𝑅𝑅1 1
𝐶𝐶1𝑆𝑆𝑅𝑅1 + 1
𝐶𝐶1𝑆𝑆=
𝑅𝑅1𝐶𝐶1𝑆𝑆𝑅𝑅1𝐶𝐶1𝑆𝑆
𝑍𝑍1 =𝑅𝑅1
𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1
𝑍𝑍2 =1𝐶𝐶2𝑆𝑆
+ 𝑅𝑅2

“Saber para Ser”
𝑍𝑍2 =1 + 𝑅𝑅2𝐶𝐶2𝑆𝑆
𝐶𝐶1𝑆𝑆
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −𝑍𝑍2𝑍𝑍1
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −1 + 𝑅𝑅2𝐶𝐶2𝑆𝑆
𝐶𝐶1𝑆𝑆𝑅𝑅1
𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −(𝑅𝑅1𝐶𝐶1 + 1)(1 + 𝑅𝑅2𝐶𝐶2𝑆𝑆)
𝐶𝐶1𝑆𝑆𝑅𝑅1
HALLAR LA FUNCION DE TRANSFERENCIA DE LA SIGUIENTE FIGURA
i1=i2
𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑘𝑘𝑅𝑅1
=𝑉𝑉𝑘𝑘 − 𝑉𝑉𝑖𝑖𝑅𝑅1
𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑘𝑘 = 𝑉𝑉𝑘𝑘 − 𝑉𝑉𝑖𝑖
𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑘𝑘 = 𝑉𝑉𝑘𝑘 − 𝑉𝑉𝑖𝑖
𝑉𝑉𝐼𝐼(𝑆𝑆) = 2𝑉𝑉𝑘𝑘(𝑆𝑆) − 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑖𝑖 =1𝑐𝑐1�𝑖𝑖3𝑑𝑑𝑑𝑑 +𝑉𝑉𝑘𝑘
𝑉𝑉𝑖𝑖(𝑆𝑆) =𝐼𝐼3(𝑆𝑆)𝐶𝐶𝑆𝑆
+ 𝑉𝑉𝑘𝑘(𝑆𝑆)
𝑉𝑉𝑘𝑘 = 𝑖𝑖3𝑅𝑅2
𝑉𝑉𝑘𝑘(𝑠𝑠) = 𝑖𝑖3(𝑠𝑠)𝑅𝑅2
𝐼𝐼3(𝑠𝑠) =𝑉𝑉𝑘𝑘(𝑆𝑆)𝑅𝑅2
𝑉𝑉𝑖𝑖(𝑠𝑠) =𝑉𝑉𝑘𝑘(𝑆𝑆)𝑅𝑅2
+ 𝑉𝑉𝑘𝑘(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠) = 𝑉𝑉𝑘𝑘(𝑆𝑆) �1
𝑅𝑅2𝐶𝐶𝑆𝑆+ 1�

“Saber para Ser”
𝑉𝑉𝑘𝑘(𝑠𝑠) =𝑉𝑉𝑘𝑘(𝑆𝑆)(𝑅𝑅2𝐶𝐶𝑆𝑆)
1 + 𝑅𝑅2𝐶𝐶𝑆𝑆
𝑉𝑉𝑖𝑖(𝑠𝑠) = 2�𝑉𝑉𝑖𝑖(𝑆𝑆)(𝑅𝑅2𝐶𝐶𝑆𝑆)
1 + 𝑅𝑅2𝐶𝐶𝑆𝑆� − 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑉𝑉𝑖𝑖(𝑠𝑠)𝑉𝑉𝑖𝑖(𝑆𝑆)
= −�1 − 𝑅𝑅2𝐶𝐶𝑆𝑆1 + 𝑅𝑅2𝐶𝐶𝑆𝑆
�
𝑍𝑍1 = 𝑅𝑅1 +1𝐶𝐶1𝑆𝑆
𝑍𝑍1 =𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1
𝐶𝐶1𝑆𝑆
𝑍𝑍2 =𝑅𝑅2𝐶𝐶3𝑆𝑆 + 1
𝐶𝐶3𝑆𝑆
𝑍𝑍3 = 𝑅𝑅2
𝑍𝑍4 = 𝑅𝑅2 +1𝐶𝐶2𝑆𝑆
𝑍𝑍4 = 𝑅𝑅2 +1𝐶𝐶2𝑆𝑆
𝑍𝑍4 =𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1
𝐶𝐶2𝑆𝑆

“Saber para Ser”
𝑍𝑍4 =𝑉𝑉𝑖𝑖(𝑆𝑆)𝑍𝑍4𝑍𝑍3 + 𝑍𝑍4
I1=I2
𝑉𝑉𝑖𝑖(𝑆𝑆) − 𝑉𝑉(𝑆𝑆)𝑍𝑍1
=𝑉𝑉𝑘𝑘(𝑆𝑆) − 𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑍𝑍4
𝑍𝑍2𝑉𝑉𝑖𝑖(𝑆𝑆) − 𝑍𝑍2𝑉𝑉(𝑆𝑆) = 𝑍𝑍1𝑉𝑉𝑘𝑘(𝑆𝑆) − 𝑍𝑍1𝑉𝑉𝑖𝑖(𝑆𝑆)
𝑍𝑍2𝑉𝑉𝑖𝑖(𝑆𝑆) − 𝑉𝑉𝑘𝑘(𝑆𝑆)(𝑍𝑍2 − 𝑍𝑍1) = −𝑍𝑍1Vo(S)
𝑍𝑍2𝑉𝑉𝑖𝑖(𝑆𝑆) − 𝑉𝑉𝑘𝑘(𝑆𝑆)(𝑍𝑍2 − 𝑍𝑍1) = −𝑍𝑍1Vo(S)
𝑍𝑍2𝑉𝑉𝑖𝑖(𝑆𝑆) −𝑉𝑉𝑖𝑖(𝑆𝑆) − 𝑍𝑍4𝑍𝑍3 + 𝑧𝑧4
(𝑍𝑍2 − 𝑍𝑍1) = −𝑍𝑍1𝑉𝑉𝑖𝑖(𝑠𝑠)
𝑉𝑉𝑖𝑖(𝑆𝑆)�𝑍𝑍2 −𝑍𝑍4(𝑍𝑍2 − 𝑍𝑍1)𝑍𝑍3 + 𝑧𝑧4
� = −𝑍𝑍1𝑉𝑉𝑖𝑖(𝑠𝑠)
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑠𝑠)
=𝑍𝑍2(𝑍𝑍3 − 𝑍𝑍4) − 𝑍𝑍4(𝑍𝑍2 + 𝑍𝑍1)
𝑍𝑍1(𝑍𝑍3 + 𝑧𝑧4)
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑠𝑠)
=𝑍𝑍2(𝑍𝑍3 − 𝑍𝑍4) − 𝑍𝑍4(𝑍𝑍2 + 𝑍𝑍1)
𝑍𝑍1(𝑍𝑍3 + 𝑧𝑧4)
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑠𝑠)
=1𝑍𝑍1
�𝑍𝑍1𝑍𝑍4 − 𝑍𝑍2𝑍𝑍4
(𝑍𝑍3 + 𝑧𝑧4) �
𝑍𝑍1.𝑍𝑍4 =(𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1)(𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1)
𝐶𝐶1𝐶𝐶2𝑆𝑆2
𝑍𝑍1.𝑍𝑍3 =(𝑅𝑅3𝐶𝐶3𝑆𝑆 + 1).𝑅𝑅2
𝐶𝐶3𝑆𝑆
𝑍𝑍3 + 𝑍𝑍4 = 𝑅𝑅2 +𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1
𝐶𝐶2𝑆𝑆
𝑍𝑍3 + 𝑍𝑍4 =2𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1
𝐶𝐶2𝑆𝑆
1𝑍𝑍1
=1
𝑅𝑅1𝐶𝐶1 + 1𝐶𝐶1𝑆𝑆
=𝐶𝐶1𝑆𝑆
𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑠𝑠)
=𝐶𝐶1𝑆𝑆
𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1�
(𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1)(𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1)𝐶𝐶𝐼𝐼𝐶𝐶2𝑆𝑆2 − 𝑅𝑅2(𝑅𝑅3𝐶𝐶3𝑆𝑆 + 1)
𝐶𝐶3𝑆𝑆2(𝐶𝐶2𝑆𝑆 + 1)
𝐶𝐶2𝑆𝑆
�
𝑉𝑉𝑖𝑖(𝑆𝑆)𝑉𝑉𝑖𝑖(𝑠𝑠)
=𝐶𝐶1𝑆𝑆
𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1�𝐶𝐶3(𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1)(𝑅𝑅2𝐶𝐶2𝑆𝑆 + 1) − 𝐶𝐶1𝐶𝐶2𝑆𝑆�𝑅𝑅2(𝑅𝑅3𝐶𝐶3𝑆𝑆 + 1)�
𝐶𝐶3(2𝑅𝑅2𝐶𝐶2𝑆𝑆 + 2)(𝑅𝑅1𝐶𝐶1𝑆𝑆 + 1) �
DIAGRAMA DE BLOQUES

“Saber para Ser”
En el tiempo frecuencia
𝒗𝒗𝒊𝒊 = 𝒊𝒊𝒊𝒊 + 𝒗𝒗𝒗𝒗 𝑽𝑽𝑽𝑽(𝑺𝑺) = 𝒊𝒊𝑽𝑽(𝑺𝑺) + 𝑽𝑽𝑽𝑽(𝑺𝑺)
𝒗𝒗𝒗𝒗 = 𝟏𝟏𝒊𝒊 ∫ 𝑽𝑽𝒅𝒅𝒅𝒅 𝑽𝑽𝑽𝑽(𝑺𝑺) = 𝑽𝑽(𝑺𝑺)
𝒊𝒊𝑺𝑺
𝑽𝑽(𝑺𝑺) = 𝑽𝑽𝑽𝑽(𝑺𝑺)−𝑽𝑽𝑽𝑽(𝑺𝑺)𝒊𝒊
𝑽𝑽𝑽𝑽(𝒔𝒔)𝑽𝑽𝒊𝒊(𝒔𝒔)
=𝟏𝟏𝒊𝒊𝒊𝒊
𝟏𝟏 + 𝟏𝟏𝒊𝒊𝒊𝒊
=𝟏𝟏
𝒊𝒊𝒊𝒊 + 𝟏𝟏

“Saber para Ser”
(t) (s)
𝒗𝒗𝒊𝒊 = 𝒊𝒊𝒊𝒊 + 𝟏𝟏𝒄𝒄 ∫ 𝒊𝒊𝒅𝒅𝒅𝒅 + 𝒗𝒗𝒗𝒗 𝑽𝑽𝒊𝒊 = 𝒊𝒊𝑽𝑽 + 𝑽𝑽
𝒊𝒊𝑺𝑺+ 𝑽𝑽𝒗𝒗
𝒗𝒗𝒗𝒗 = 𝒊𝒊 𝒅𝒅𝒊𝒊𝒅𝒅𝒅𝒅
𝑽𝑽𝒗𝒗 = 𝒊𝒊𝑺𝑺𝑽𝑽
𝑽𝑽 = [𝑽𝑽𝒊𝒊 − 𝒊𝒊𝑽𝑽 − 𝑽𝑽𝒗𝒗]𝒊𝒊𝑺𝑺

“Saber para Ser”
𝑽𝑽𝑽𝑽𝑽𝑽𝑽𝑽
=𝒊𝒊𝒊𝒊𝑺𝑺𝟐𝟐
𝟏𝟏 + 𝒊𝒊𝒊𝒊𝑺𝑺
𝟏𝟏 + 𝒊𝒊𝒊𝒊𝑺𝑺𝟐𝟐𝟏𝟏 + 𝒊𝒊𝒊𝒊𝑺𝑺
=𝒊𝒊𝒊𝒊𝑺𝑺𝟐𝟐
𝟏𝟏 + 𝒊𝒊𝒊𝒊𝑺𝑺 + 𝒊𝒊𝒊𝒊𝑺𝑺𝟐𝟐
TIEMPO FRECUENCIA
𝒗𝒗𝒊𝒊 = 𝒊𝒊𝟏𝟏𝒊𝒊 + 𝟏𝟏𝒄𝒄𝟏𝟏∫ 𝒊𝒊𝒅𝒅𝒅𝒅 + 𝒗𝒗𝒗𝒗 𝑽𝑽𝒊𝒊 = 𝒊𝒊𝑽𝑽 + 𝑽𝑽
𝒊𝒊𝟏𝟏+ 𝑽𝑽𝒗𝒗
𝒗𝒗𝒗𝒗 = 𝒊𝒊𝟐𝟐𝒊𝒊 + 𝟏𝟏𝒄𝒄𝟐𝟐∫ 𝒊𝒊𝒅𝒅𝒅𝒅 𝑽𝑽𝒗𝒗 = 𝒊𝒊𝟐𝟐𝑽𝑽 + 𝑽𝑽
𝒊𝒊𝟐𝟐𝑺𝑺
𝒊𝒊 =𝒗𝒗𝒊𝒊 − 𝟏𝟏
𝒄𝒄𝟏𝟏 ∫𝒊𝒊𝒅𝒅𝒅𝒅 − 𝒗𝒗𝒗𝒗
𝒊𝒊

“Saber para Ser”
𝑽𝑽𝑽𝑽𝑽𝑽𝑽𝑽
=
𝒊𝒊𝟏𝟏𝑺𝑺(𝒊𝒊𝟐𝟐𝒊𝒊𝟐𝟐𝑺𝑺)(𝟏𝟏 + 𝒊𝒊𝒊𝒊𝟏𝟏𝑺𝑺)𝒊𝒊𝟐𝟐𝑺𝑺
𝟏𝟏 + 𝒊𝒊𝟏𝟏𝑺𝑺(𝒊𝒊𝟐𝟐𝒊𝒊𝟐𝟐𝑺𝑺(𝟏𝟏 + 𝒊𝒊𝟏𝟏𝒊𝒊𝟏𝟏𝑺𝑺)𝒊𝒊𝟐𝟐𝑺𝑺
=𝒊𝒊𝟏𝟏𝑺𝑺(𝒊𝒊𝟐𝟐𝒊𝒊𝟐𝟐𝑺𝑺)
(𝟏𝟏 + 𝒊𝒊𝟏𝟏𝒊𝒊𝟏𝟏𝑺𝑺)𝒊𝒊𝟐𝟐𝑺𝑺 + 𝒊𝒊𝟏𝟏𝑺𝑺(𝒊𝒊𝟐𝟐𝒊𝒊𝟐𝟐𝑺𝑺)
𝒗𝒗𝒊𝒊 = 𝒊𝒊𝒊𝒊 + 𝒊𝒊𝒅𝒅𝒊𝒊𝒅𝒅𝒅𝒅
+ 𝒆𝒆𝒆𝒆 𝑽𝑽𝒊𝒊(𝒔𝒔) = 𝒊𝒊𝑽𝑽(𝒔𝒔) + 𝒊𝒊𝑺𝑺𝑽𝑽(𝒔𝒔) + 𝑬𝑬𝒆𝒆(𝒔𝒔)
𝝉𝝉 = 𝒆𝒆 𝒅𝒅∅𝒅𝒅𝒅𝒅
= 𝑱𝑱 𝒅𝒅𝟐𝟐
𝒅𝒅𝒅𝒅𝟐𝟐 𝑻𝑻 = 𝒆𝒆𝑺𝑺∅(𝒔𝒔) = 𝑱𝑱𝑺𝑺𝟐𝟐∅(𝒔𝒔)
𝝉𝝉 = 𝒌𝒌𝟏𝟏 ∗ 𝒊𝒊 𝑻𝑻 = 𝑲𝑲𝟏𝟏 ∗ 𝑽𝑽(𝒔𝒔)
𝒆𝒆𝒆𝒆 = 𝒌𝒌𝟐𝟐𝒅𝒅∅𝒅𝒅𝒅𝒅
𝑬𝑬𝒆𝒆 = 𝑲𝑲𝟐𝟐𝑺𝑺∅(𝒔𝒔)

“Saber para Ser”
𝑽𝑽(𝒔𝒔) =𝑽𝑽𝒊𝒊(𝒔𝒔) − 𝑬𝑬𝒆𝒆(𝒔𝒔) − 𝒊𝒊𝑽𝑽(𝒔𝒔)
𝒊𝒊𝑺𝑺
𝑽𝑽𝑽𝑽𝑽𝑽𝑽𝑽
=
𝑲𝑲𝟏𝟏(𝒊𝒊 + 𝒊𝒊𝑺𝑺)(𝑱𝑱𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺)
𝟏𝟏 + 𝑲𝑲𝟐𝟐𝑺𝑺 ∗ 𝑲𝑲𝟏𝟏(𝒊𝒊 + 𝒊𝒊𝑺𝑺)(𝑱𝑱𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺)
=𝑲𝑲𝑽𝑽
(𝒊𝒊 + 𝒊𝒊𝑺𝑺)(𝑱𝑱𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺) + 𝑲𝑲𝟏𝟏𝑲𝑲𝟐𝟐𝑺𝑺

“Saber para Ser”
(t) (s)
𝒗𝒗𝒊𝒊 = 𝒊𝒊𝒊𝒊 + 𝒊𝒊𝒅𝒅𝒊𝒊𝒅𝒅𝒅𝒅
+ 𝒆𝒆𝒆𝒆 𝑽𝑽𝒊𝒊(𝒔𝒔) = 𝒊𝒊𝑽𝑽(𝒔𝒔) + 𝒊𝒊𝑺𝑺𝑽𝑽(𝒔𝒔) + 𝑬𝑬𝒆𝒆(𝒔𝒔)
𝑓𝑓𝑒𝑒 − 𝑓𝑓𝑓𝑓 − 𝑓𝑓𝑓𝑓 = 𝐴𝐴𝑚𝑚 m´= M+m
𝑓𝑓 − 𝑓𝑓𝑘𝑘 − 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
= 𝐴𝐴´𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝑓𝑓𝑒𝑒 − 𝑓𝑓𝑘𝑘 − 𝑓𝑓 𝑑𝑑𝑑𝑑𝑑𝑑𝑡𝑡
= (𝑀𝑀 + 𝐴𝐴) 𝑑𝑑2𝑑𝑑𝑑𝑑𝑡𝑡2
𝐹𝐹𝑖𝑖 − 𝐾𝐾𝑘𝑘 − 𝑓𝑓𝑆𝑆𝑘𝑘 = (𝑀𝑀 + 𝐴𝐴)𝑆𝑆2𝑘𝑘
𝑓𝑓𝑒𝑒 = 𝑓𝑓1 ∗ 𝑖𝑖 𝐹𝐹𝑒𝑒 = 𝐾𝐾1∗𝐼𝐼
𝑒𝑒𝑓𝑓 = 𝑓𝑓2 ∗𝑑𝑑𝑑𝑑𝑑𝑑𝑡𝑡
𝑖𝑖𝑓𝑓 = 𝐾𝐾2𝑆𝑆𝑘𝑘

“Saber para Ser”
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
=
𝟏𝟏(𝑴𝑴 + 𝒎𝒎)𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺
𝟏𝟏 + 𝑲𝑲(𝑴𝑴 + 𝒎𝒎)𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺
= 𝟏𝟏
(𝑴𝑴 + 𝒎𝒎)𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺 + 𝑲𝑲
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
=
𝑲𝑲𝟏𝟏(𝒊𝒊 + 𝒊𝒊𝑺𝑺)[(𝑴𝑴 + 𝒎𝒎)𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺 + 𝑲𝑲]
𝟏𝟏 + 𝑲𝑲𝟐𝟐𝑺𝑺𝑲𝑲𝟏𝟏(𝒊𝒊 + 𝒊𝒊𝑺𝑺)[(𝑴𝑴 + 𝒎𝒎)𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺 + 𝑲𝑲]
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
= 𝑲𝑲𝟏𝟏
(𝒊𝒊 + 𝒊𝒊𝑺𝑺)[(𝑴𝑴 + 𝒎𝒎)𝑺𝑺𝟐𝟐 + 𝒆𝒆𝑺𝑺 + 𝑲𝑲] + 𝑲𝑲𝟐𝟐𝑺𝑺𝑲𝑲𝟏𝟏
𝒗𝒗𝒊𝒊 = 𝒊𝒊𝟏𝟏𝒊𝒊𝟏𝟏 + 𝒗𝒗𝒗𝒗 𝑽𝑽𝒊𝒊(𝒔𝒔) = 𝒊𝒊𝟏𝟏𝑽𝑽𝟏𝟏(𝒔𝒔) + 𝑽𝑽𝑽𝑽(𝒔𝒔)

“Saber para Ser”
𝒗𝒗𝒗𝒗 = 𝒊𝒊𝟐𝟐𝒊𝒊𝟐𝟐 + 𝒗𝒗𝒗𝒗 𝑽𝑽𝑽𝑽(𝒔𝒔) = 𝒊𝒊𝟐𝟐𝑽𝑽𝟐𝟐(𝒔𝒔) + 𝑽𝑽𝑽𝑽(𝒔𝒔)
𝒗𝒗𝒗𝒗 = 𝟏𝟏𝒄𝒄𝟏𝟏∫ 𝒊𝒊𝟏𝟏𝒅𝒅𝒅𝒅 −
𝟏𝟏𝒄𝒄𝟐𝟐∫ 𝒊𝒊𝟐𝟐𝒅𝒅𝒅𝒅 𝑽𝑽𝑽𝑽(𝒔𝒔) = 𝑽𝑽𝟏𝟏(𝒔𝒔)
𝒊𝒊𝟏𝟏𝑺𝑺− 𝑽𝑽𝟐𝟐(𝒔𝒔)
𝒊𝒊𝟐𝟐𝑺𝑺
𝒗𝒗𝒗𝒗 = 𝟏𝟏𝒄𝒄𝟐𝟐∫ 𝒊𝒊𝟐𝟐𝒅𝒅𝒅𝒅 𝑽𝑽𝑽𝑽(𝒔𝒔) = 𝑽𝑽𝟐𝟐(𝒔𝒔)
𝒊𝒊𝟐𝟐𝑺𝑺
𝑽𝑽𝟏𝟏(𝒔𝒔) =𝑽𝑽𝒊𝒊(𝒔𝒔) − 𝑽𝑽𝑽𝑽(𝒔𝒔)
𝒊𝒊𝟏𝟏

“Saber para Ser”
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
=
𝟏𝟏𝒊𝒊𝟏𝟏𝑺𝑺[𝒊𝒊𝟐𝟐(𝒊𝒊𝟏𝟏𝒊𝒊𝟐𝟐𝑺𝑺 + 𝟏𝟏) + 𝒊𝒊𝟐𝟐]
𝟏𝟏 + 𝒊𝒊𝟐𝟐𝒊𝒊𝟐𝟐𝑺𝑺 + 𝟏𝟏𝒊𝒊𝟏𝟏𝑺𝑺[𝒊𝒊𝟐𝟐(𝒊𝒊𝟏𝟏𝒊𝒊𝟐𝟐𝑺𝑺 + 𝟏𝟏) + 𝒊𝒊𝟐𝟐]
𝑽𝑽𝒗𝒗𝑽𝑽𝒊𝒊
=𝟏𝟏
𝒊𝒊𝟏𝟏𝑺𝑺[𝒊𝒊𝟐𝟐(𝒊𝒊𝟏𝟏𝒊𝒊𝟐𝟐𝑺𝑺 + 𝟏𝟏) + 𝒊𝒊𝟐𝟐] + 𝒊𝒊𝟐𝟐𝒊𝒊𝟐𝟐𝑺𝑺 + 𝟏𝟏

“Saber para Ser”
Reducir el siguiente diagrama de bloques

“Saber para Ser”

“Saber para Ser”
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=
𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑(𝟏𝟏 + 𝑯𝑯𝟐𝟐𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑) + 𝑯𝑯𝟏𝟏𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐
𝟏𝟏 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑(𝟏𝟏 + 𝑯𝑯𝟐𝟐𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑) + 𝑯𝑯𝟏𝟏𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐

“Saber para Ser”
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑
(𝟏𝟏 + 𝑯𝑯𝟐𝟐𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑) + 𝑯𝑯𝟏𝟏𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑

“Saber para Ser”
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=
𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝟏𝟏 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑯𝑯𝟏𝟏
𝟏𝟏 + 𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐(𝟏𝟏 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑯𝑯𝟏𝟏)𝑮𝑮𝟏𝟏
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)
(𝟏𝟏 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑯𝑯𝟏𝟏) + 𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=
𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)(𝟏𝟏 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑯𝑯𝟏𝟏) + 𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐
𝟏𝟏 + 𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)(𝟏𝟏 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑯𝑯𝟏𝟏) + 𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐

“Saber para Ser”
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)
(𝟏𝟏 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑯𝑯𝟏𝟏) + 𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐 + 𝑮𝑮𝟏𝟏(𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)

“Saber para Ser”
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
=𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒
𝟏𝟏 + 𝑯𝑯𝟏𝟏𝑮𝑮𝟐𝟐(𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
=
𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒𝟏𝟏 + 𝑯𝑯𝟏𝟏𝑮𝑮𝟐𝟐(𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)
𝟏𝟏 + (𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐[𝟏𝟏 + 𝑯𝑯𝟏𝟏𝑮𝑮𝟐𝟐(𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)]𝑮𝑮𝟏𝟏
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
=𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒
[𝟏𝟏 + 𝑯𝑯𝟏𝟏𝑮𝑮𝟐𝟐(𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)]𝑮𝑮𝟏𝟏 + (𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
=
𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒[𝟏𝟏 + 𝑯𝑯𝟏𝟏𝑮𝑮𝟐𝟐(𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)]𝑮𝑮𝟏𝟏 + (𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐
𝟏𝟏 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒[𝟏𝟏 + 𝑯𝑯𝟏𝟏𝑮𝑮𝟐𝟐(𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)]𝑮𝑮𝟏𝟏 + (𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐
𝑽𝑽𝑽𝑽𝑽𝑽𝒊𝒊
=𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒
[𝟏𝟏 + 𝑯𝑯𝟏𝟏𝑮𝑮𝟐𝟐(𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)]𝑮𝑮𝟏𝟏 + (𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒)𝑯𝑯𝟐𝟐 + 𝑮𝑮𝟏𝟏𝑮𝑮𝟐𝟐𝑮𝑮𝟑𝟑 + 𝑮𝑮𝟒𝟒

“Saber para Ser”
Diagrama de flujo de señal
𝒗𝒗 = 𝒊𝒊 ∗ 𝒊𝒊 𝑽𝑽 = 𝒊𝒊 ∗ 𝑽𝑽(𝒔𝒔)
Construir los siguientes flujos de señal del siguiente circuito
𝒀𝒀𝟐𝟐 = 𝑮𝑮𝟏𝟏𝒀𝒀𝟏𝟏 + 𝑮𝑮𝟑𝟑𝒀𝒀𝟑𝟑
𝒀𝒀𝟑𝟑 = 𝑮𝑮𝟒𝟒𝒀𝒀𝟏𝟏 + 𝑮𝑮𝟐𝟐𝒀𝒀𝟐𝟐 + 𝑮𝑮𝟓𝟓𝒀𝒀𝟑𝟑
𝒀𝒀𝟒𝟒 = 𝑮𝑮𝟔𝟔𝒀𝒀𝟐𝟐 + 𝑮𝑮𝟕𝟕𝒀𝒀𝟑𝟑
Ejemplo:

“Saber para Ser”
Regla del señor Mason´s
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝜮𝜮𝑻𝑻𝒅𝒅 ∗ 𝜟𝜟𝒄𝒄
𝜟𝜟
Donde:
Td= trayectorias directas
𝜟𝜟c=cofactor
𝜟𝜟= determinante del sistema
∆= 1 − (𝐿𝐿1 + 𝐿𝐿2 + 𝐿𝐿3 + ⋯ ) + (𝐿𝐿1 ∗ 𝐿𝐿2) + (𝐿𝐿… .∗ 𝐿𝐿. . )
𝑇𝑇 = 𝐺𝐺1𝐺𝐺2𝐺𝐺3 ∆1 = 1
𝐿𝐿1 = −𝐺𝐺1𝐺𝐺2𝐺𝐺3
𝐿𝐿2 = −𝐺𝐺1𝐺𝐺2𝐻𝐻1
𝐿𝐿3 = −𝐺𝐺2𝐺𝐺3𝐻𝐻2
∆= 1 − (𝐿𝐿1 + 𝐿𝐿2 + 𝐿𝐿3)
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑻𝑻 ∗ 𝜟𝜟𝟏𝟏𝜟𝜟
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝐺𝐺1𝐺𝐺2𝐺𝐺3
𝟏𝟏 + 𝐺𝐺1𝐺𝐺2𝐺𝐺3 + 𝐺𝐺1𝐺𝐺2𝐻𝐻1 + 𝐺𝐺2𝐺𝐺3𝐻𝐻2

“Saber para Ser”
𝑇𝑇1 = 𝐺𝐺1𝐺𝐺2𝐺𝐺4 ∆1 = 1
𝑇𝑇2 = 𝐺𝐺1𝐺𝐺3𝐺𝐺4 ∆2 = 1
𝐿𝐿1 = −𝐺𝐺1𝐺𝐺2𝐺𝐺4
𝐿𝐿2 = −𝐺𝐺1𝐺𝐺2𝐻𝐻2
𝐿𝐿3 = −𝐻𝐻1𝐺𝐺4
𝐿𝐿4 = −𝐺𝐺1𝐺𝐺3𝐺𝐺4
𝐿𝐿2𝐿𝐿3 = 𝐺𝐺1𝐺𝐺2𝐻𝐻2𝐻𝐻1𝐺𝐺4
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑻𝑻𝟏𝟏 ∗ 𝜟𝜟𝟏𝟏 + 𝑻𝑻𝟐𝟐 ∗ 𝜟𝜟𝟐𝟐
𝜟𝜟
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝐺𝐺1𝐺𝐺2𝐺𝐺4 + 𝐺𝐺1𝐺𝐺3𝐺𝐺4
𝟏𝟏 + 𝐺𝐺1𝐺𝐺2𝐺𝐺4 + 𝐺𝐺1𝐺𝐺2𝐻𝐻2 + 𝐻𝐻1𝐺𝐺4 + 𝐺𝐺1𝐺𝐺3𝐺𝐺4 + 𝐺𝐺1𝐺𝐺2𝐻𝐻2𝐻𝐻1𝐺𝐺4

“Saber para Ser”
𝑇𝑇1 = 𝐺𝐺1𝐺𝐺2𝐺𝐺3 ∆1 = 1
𝑇𝑇2 = 𝐺𝐺1𝐺𝐺4 ∆2 = 1
𝐿𝐿1 = −𝐺𝐺1𝐺𝐺2𝐺𝐺3
𝐿𝐿2 = −𝐺𝐺1𝐺𝐺2𝐻𝐻1
𝐿𝐿3 = −𝐺𝐺2𝐺𝐺3𝐻𝐻2
𝐿𝐿4 = −𝐺𝐺1𝐺𝐺4
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑻𝑻𝟏𝟏 ∗ 𝜟𝜟𝟏𝟏 + 𝑻𝑻𝟐𝟐 ∗ 𝜟𝜟𝟐𝟐
𝜟𝜟
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝐺𝐺1𝐺𝐺2𝐺𝐺3 + 𝐺𝐺1𝐺𝐺4
𝟏𝟏 + 𝐺𝐺1𝐺𝐺2𝐺𝐺3 + 𝐺𝐺1𝐺𝐺2𝐻𝐻1 + 𝐺𝐺2𝐺𝐺3𝐻𝐻2 + 𝐺𝐺1𝐺𝐺4

“Saber para Ser”
𝑇𝑇1 = 𝐺𝐺1𝐺𝐺2 ∆1 = 1
𝑇𝑇2 = 𝐺𝐺1𝐺𝐺3 ∆2 = 1
𝐿𝐿1 = −𝐺𝐺1𝐺𝐺2𝐻𝐻1
𝐿𝐿2 = −𝐺𝐺2𝐻𝐻2
𝐿𝐿3 = −𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐻𝐻2𝐻𝐻1
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑻𝑻𝟏𝟏 ∗ 𝜟𝜟𝟏𝟏 + 𝑻𝑻𝟐𝟐 ∗ 𝜟𝜟𝟐𝟐
𝜟𝜟
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝐺𝐺1𝐺𝐺2 + 𝐺𝐺1𝐺𝐺3
𝟏𝟏 + 𝐺𝐺1𝐺𝐺2𝐻𝐻1 + 𝐺𝐺2𝐻𝐻2 + 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐻𝐻2𝐻𝐻1
Hallar la función de transferencia

“Saber para Ser”
𝑇𝑇1 = 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐺𝐺6 ∆1 = 1
𝑇𝑇2 = 𝐺𝐺1𝐺𝐺2𝐺𝐺7𝐺𝐺6 ∆2 = 1 + 𝐿𝐿1 = 1 + 𝐺𝐺4𝐻𝐻4
𝑇𝑇3 = 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺8 ∆3 = 1
𝐿𝐿1 = −𝐺𝐺4𝐻𝐻4 𝐿𝐿1𝐿𝐿4 = 𝐺𝐺4𝐻𝐻4𝐺𝐺2𝐺𝐺7𝐻𝐻2
𝐿𝐿2 = −𝐺𝐺5𝐺𝐺6𝐻𝐻1 𝐿𝐿1𝐿𝐿7 = 𝐺𝐺4𝐻𝐻4𝐺𝐺1𝐺𝐺2𝐺𝐺7𝐺𝐺6𝐻𝐻3
𝐿𝐿3 = −𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐻𝐻2 𝐿𝐿5𝐿𝐿4 = 𝐺𝐺8𝐻𝐻1𝐺𝐺2𝐺𝐺7𝐻𝐻2
𝐿𝐿4 = −𝐺𝐺2𝐺𝐺7𝐻𝐻2
𝐿𝐿5 = −𝐺𝐺8𝐻𝐻1
𝐿𝐿6 = −𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐺𝐺6𝐻𝐻3
𝐿𝐿7 = −𝐺𝐺1𝐺𝐺2𝐺𝐺7𝐺𝐺6𝐻𝐻3
𝐿𝐿8 = −𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺8𝐻𝐻3
∆= 1 − (𝐿𝐿1 + 𝐿𝐿2 + 𝐿𝐿3 + 𝐿𝐿4 + 𝐿𝐿5 + 𝐿𝐿6 + 𝐿𝐿7 + 𝐿𝐿8) + (𝐿𝐿1𝐿𝐿4) + (𝐿𝐿1𝐿𝐿7) + (𝐿𝐿5𝐿𝐿4)
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑻𝑻𝟏𝟏 ∗ 𝜟𝜟𝟏𝟏 + 𝑻𝑻𝟐𝟐 ∗ 𝜟𝜟𝟐𝟐
𝜟𝜟
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐺𝐺6 + 𝐺𝐺1𝐺𝐺2𝐺𝐺7𝐺𝐺6 + (1 + 𝐺𝐺4𝐻𝐻4) + 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺8
𝟏𝟏 + 𝐺𝐺4𝐻𝐻4 + 𝐺𝐺5𝐺𝐺6𝐻𝐻1 + 𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐻𝐻2 + 𝐺𝐺2𝐺𝐺7𝐻𝐻2 + 𝐺𝐺8𝐻𝐻1 + 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐺𝐺6𝐻𝐻3
𝐺𝐺1𝐺𝐺2𝐺𝐺7𝐺𝐺6𝐻𝐻3 + 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺8𝐻𝐻3 + 𝐺𝐺4𝐻𝐻4𝐺𝐺2𝐺𝐺7𝐻𝐻2 + 𝐺𝐺4𝐻𝐻4𝐺𝐺1𝐺𝐺2𝐺𝐺7𝐺𝐺6𝐻𝐻3 + 𝐺𝐺8𝐻𝐻1𝐺𝐺2𝐺𝐺7𝐻𝐻2
Hallar la función de transferencia del siguiente sistema

“Saber para Ser”
𝑇𝑇1 = 𝐺𝐺1𝐺𝐺2𝐺𝐺3 ∆1 = 1
𝐿𝐿1 = −𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐻𝐻1
𝐿𝐿2 = −𝐺𝐺1𝐺𝐺2𝐺𝐺3
𝐿𝐿3 = −𝐺𝐺2𝐺𝐺3𝐻𝐻2
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑻𝑻𝟏𝟏 ∗ 𝜟𝜟𝟏𝟏
𝟏𝟏 − (𝒊𝒊𝟏𝟏 + 𝒊𝒊𝟐𝟐 + 𝒊𝒊𝟑𝟑)
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝐺𝐺1𝐺𝐺2𝐺𝐺3
𝟏𝟏 + 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐻𝐻1 + 𝐺𝐺1𝐺𝐺2𝐺𝐺3 + 𝐺𝐺2𝐺𝐺3𝐻𝐻2
𝑇𝑇1 = 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5 ∆1 = 1
𝑇𝑇2 = 𝐺𝐺1𝐺𝐺4𝐺𝐺5𝐺𝐺6 ∆2 = 1
𝑇𝑇3 = 𝐺𝐺1𝐺𝐺2𝐺𝐺7 ∆3 = 1 − 𝐿𝐿2 = 1 + 𝐺𝐺4𝐻𝐻1
𝐿𝐿1 = −𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐻𝐻2 𝐿𝐿2𝐿𝐿4 = 𝐺𝐺4𝐻𝐻1𝐺𝐺2𝐺𝐺7𝐻𝐻2
𝐿𝐿2 = −𝐺𝐺4𝐻𝐻1
𝐿𝐿3 = −𝐺𝐺4𝐺𝐺5𝐺𝐺6𝐻𝐻2

“Saber para Ser”
𝐿𝐿4 = −𝐺𝐺2𝐺𝐺7𝐻𝐻2
∆= 1 − (𝐿𝐿1 + 𝐿𝐿2 + 𝐿𝐿3 + 𝐿𝐿4) + (𝐿𝐿2𝐿𝐿4)
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝑻𝑻𝟏𝟏 ∗ 𝜟𝜟𝟏𝟏 + 𝑻𝑻𝟐𝟐 ∗ 𝜟𝜟𝟐𝟐 + 𝑻𝑻𝟑𝟑∆𝟑𝟑
𝜟𝜟
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5 + 𝐺𝐺1𝐺𝐺4𝐺𝐺5𝐺𝐺6 + (𝐺𝐺1𝐺𝐺2𝐺𝐺7)(1 + 𝐺𝐺4𝐻𝐻1)𝟏𝟏 + 𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐻𝐻2 + 𝐺𝐺4𝐻𝐻1 + 𝐺𝐺4𝐺𝐺5𝐺𝐺6𝐻𝐻2 + 𝐺𝐺2𝐺𝐺7𝐻𝐻2
Otro método
Trayectorias
𝑇𝑇1 = 𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5
𝑇𝑇2 = 𝐺𝐺1𝐺𝐺4𝐺𝐺5𝐺𝐺6
𝑇𝑇3 = 𝐺𝐺1𝐺𝐺2𝐺𝐺7
Lazos
𝐿𝐿2 = −𝐺𝐺4𝐻𝐻1
𝐿𝐿1 = −𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐻𝐻2

“Saber para Ser”
𝐿𝐿4 = −𝐺𝐺2𝐺𝐺7𝐻𝐻2
𝐿𝐿3 = −𝐺𝐺4𝐺𝐺5𝐺𝐺6𝐻𝐻2
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔)
=𝐺𝐺1𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5 + 𝐺𝐺1𝐺𝐺4𝐺𝐺5𝐺𝐺6 + (𝐺𝐺1𝐺𝐺2𝐺𝐺7)(1 + 𝐺𝐺4𝐻𝐻1)𝟏𝟏 + 𝐺𝐺2𝐺𝐺3𝐺𝐺4𝐺𝐺5𝐻𝐻2 + 𝐺𝐺4𝐻𝐻1 + 𝐺𝐺4𝐺𝐺5𝐺𝐺6𝐻𝐻2 + 𝐺𝐺2𝐺𝐺7𝐻𝐻2
Características de un sistema retroalimentados
Estabilidad
𝑆𝑆2 + 3𝑆𝑆 + 2 = 0
(𝑆𝑆 + 2)(𝑆𝑆 + 1) = 0
𝑆𝑆 = −2
𝑆𝑆 = −1

“Saber para Ser”
El sistema es estable
𝑆𝑆2 + 𝑠𝑠 − 2 = 0
(𝑆𝑆 + 2)(𝑆𝑆 − 1) = 0
𝑆𝑆 = −2
𝑆𝑆 = 1

“Saber para Ser”
El sistema es inestable
Ejemplo
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔) =
𝟑𝟑𝒔𝒔(𝒔𝒔 + 𝟏𝟏)(𝒔𝒔 + 𝟐𝟐)
𝟏𝟏 + 𝟑𝟑𝒔𝒔(𝒔𝒔 + 𝟏𝟏)(𝒔𝒔 + 𝟐𝟐)
=𝟑𝟑
𝑺𝑺(𝑺𝑺 + 𝟏𝟏)(𝑺𝑺 + 𝟐𝟐) + 𝟑𝟑
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔) =
𝟑𝟑𝑺𝑺𝟑𝟑 + 𝟑𝟑𝑺𝑺𝟐𝟐 + 𝟐𝟐𝑺𝑺 + 𝟑𝟑
𝑺𝑺𝟑𝟑 + 𝟑𝟑𝑺𝑺𝟐𝟐 + 𝟐𝟐𝑺𝑺 + 𝟑𝟑 = 𝒗𝒗
S1= -2.6717
S2= -0.1642 + 1.0469i
S3= -0.1642 - 1.0469i

“Saber para Ser”
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔) =
𝟕𝟕𝒔𝒔(𝒔𝒔 + 𝟏𝟏)(𝒔𝒔 + 𝟐𝟐)
𝟏𝟏 + 𝟕𝟕𝒔𝒔(𝒔𝒔 + 𝟏𝟏)(𝒔𝒔 + 𝟐𝟐)
=𝟕𝟕
𝑺𝑺(𝑺𝑺 + 𝟏𝟏)(𝑺𝑺 + 𝟐𝟐) + 𝟕𝟕
𝒊𝒊(𝒔𝒔)𝒊𝒊(𝒔𝒔) =
𝟕𝟕𝑺𝑺𝟑𝟑 + 𝟑𝟑𝑺𝑺𝟐𝟐 + 𝟐𝟐𝑺𝑺 + 𝟕𝟕
𝑺𝑺𝟑𝟑 + 𝟑𝟑𝑺𝑺𝟐𝟐 + 𝟐𝟐𝑺𝑺 + 𝟕𝟕 = 𝒗𝒗
S1= -3.0867
S2= 0.0434 + 1.5053i
S3= 0.0434 - 1.5053i

“Saber para Ser”
B 5Nseg/m K 8N/m m 0,5kg
−𝑓𝑓 + 𝑓𝑓𝑓𝑓 + 𝑓𝑓𝑓𝑓 = 𝐴𝐴𝑚𝑚
−𝑓𝑓 + 𝑓𝑓𝑘𝑘 + 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
= 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2

“Saber para Ser”
𝑓𝑓 = 𝑓𝑓𝑘𝑘 + 𝑓𝑓𝑑𝑑𝑘𝑘𝑑𝑑𝑑𝑑
− 𝐴𝐴𝑑𝑑2𝑘𝑘𝑑𝑑𝑑𝑑2
𝐹𝐹(𝑠𝑠) = 𝑓𝑓𝑘𝑘(𝑠𝑠) + 𝑓𝑓𝑆𝑆𝑘𝑘(𝑠𝑠) + 𝐴𝐴𝑆𝑆2𝑘𝑘(𝑠𝑠)
𝐹𝐹(𝑠𝑠) = 𝑘𝑘(𝑠𝑠)(𝑓𝑓 + 𝑓𝑓𝑆𝑆 + 𝐴𝐴𝑆𝑆2)
𝑋𝑋(𝑠𝑠)𝐹𝐹(𝑠𝑠)
=1
(𝑓𝑓 + 𝑓𝑓𝑆𝑆 + 𝐴𝐴𝑆𝑆2)
𝑋𝑋(𝑠𝑠)𝐹𝐹(𝑠𝑠)
=1
(0,5𝑆𝑆2 + 5𝑆𝑆 + 8)
𝑋𝑋(𝑠𝑠)𝐹𝐹(𝑠𝑠)
=1
(𝑆𝑆2 + 10𝑆𝑆 + 16)
𝑆𝑆2 + 10𝑆𝑆 + 16 = 0
𝑠𝑠 + 8)(𝑠𝑠 + 2) = 0
𝑆𝑆1 = −8
𝑆𝑆2 = −2

“Saber para Ser”
𝑉𝑉𝑖𝑖𝑉𝑉𝑖𝑖
=1
𝐿𝐿𝐶𝐶𝑆𝑆2 + 𝑅𝑅𝐶𝐶𝑆𝑆 + 1
𝐿𝐿𝐶𝐶𝑆𝑆2 + 𝑅𝑅𝐶𝐶𝑆𝑆 + 1 = 0
𝑆𝑆2 +𝑅𝑅𝑆𝑆𝐿𝐿
+1𝐿𝐿𝐶𝐶
= 0 => 𝑘𝑘2 + 2𝑘𝑘𝑥𝑥 + 𝑥𝑥2 = 0
𝑆𝑆2 + 2𝜆𝜆𝜆𝜆𝐴𝐴 + 𝜆𝜆𝐴𝐴2 = 0
𝑆𝑆2 + 2𝑆𝑆 + 1 = 0

“Saber para Ser”
Frecuencia natural (no amortiguada)
𝜆𝜆𝐴𝐴2 =1𝐿𝐿𝐶𝐶
𝜆𝜆𝐴𝐴 =1
√𝐿𝐿𝐶𝐶
Amortiguamiento real del sistema
2𝜆𝜆𝜆𝜆𝐴𝐴 =𝑅𝑅𝐿𝐿
𝜆𝜆 =𝑅𝑅
2𝜆𝜆𝐴𝐴𝐿𝐿
𝜆𝜆 =𝑅𝑅
2 � 1√𝐿𝐿𝐶𝐶
�2 =
𝑅𝑅2𝐿𝐿√𝐿𝐿𝐶𝐶
=𝑅𝑅2�𝐶𝐶𝐿𝐿
𝐶𝐶𝑖𝑖𝑒𝑒𝑓𝑓𝑖𝑖𝑐𝑐𝑖𝑖𝑒𝑒𝐶𝐶𝑑𝑑𝑒𝑒 𝑑𝑑𝑒𝑒 𝑚𝑚𝐴𝐴𝑖𝑖𝑎𝑎𝑑𝑑𝑖𝑖𝑎𝑎𝑎𝑎𝑚𝑚𝐴𝐴𝑖𝑖𝑒𝑒𝐶𝐶𝑑𝑑𝑖𝑖
Oscilante 𝜆𝜆 = 0
Sub amortiguado 0 < 𝜆𝜆 < 1

“Saber para Ser”
Críticamente amortiguado 𝜆𝜆 = 1
Sobre amortiguado 𝜆𝜆 = 1
𝜆𝜆 = 0
0 < 𝜆𝜆 < 1
𝜆𝜆 = 1
𝜆𝜆 > 1

“Saber para Ser”
SISTEMA

“Saber para Ser”
CRITERIO DE ESTABILIDAD DE ROUTH HUMWIST
𝑓𝑓0𝑠𝑠𝑚𝑚 + 𝑓𝑓1𝑠𝑠𝑚𝑚−1 + ⋯… … . 𝑓𝑓𝑛𝑛 − 1𝑠𝑠 + 𝑓𝑓𝑚𝑚
𝑚𝑚0𝑠𝑠𝑚𝑚 + 𝑚𝑚1𝑠𝑠𝑚𝑚−1 + ⋯… … . +𝑚𝑚𝑛𝑛−1𝑠𝑠 + 𝑚𝑚𝑛𝑛
Polos: P(s) = 𝑚𝑚0𝑠𝑠𝑚𝑚 + 𝑚𝑚1𝑠𝑠𝑚𝑚−1 + ⋯… … . +𝑚𝑚𝑛𝑛−1𝑠𝑠 + 𝑚𝑚𝑛𝑛 = 0
Verificar cuál de las los siguientes sistemas es estable o inestable dado su polinomio característico.
1) P(s) = 𝑠𝑠3 + 6𝑠𝑠2 + 11𝑠𝑠 + 6 𝑑𝑑1 = (6)(11)−66
𝑑𝑑1 =66 − 6
6
𝑑𝑑1 = 10 𝑑𝑑2 = (6)(0)−1
0
𝑑𝑑2 = 0 𝑑𝑑3 = (10)(6)−6(0)
10
𝑑𝑑3 = 6
2) P(s) = 𝑠𝑠3 + 4𝑠𝑠2 + 𝑠𝑠 + 16
𝑓𝑓1 =𝑚𝑚1𝑚𝑚2 − 𝑚𝑚0𝑚𝑚3
𝑚𝑚1 𝑐𝑐1=
𝑓𝑓1𝑚𝑚3 − 𝑚𝑚1𝑓𝑓2𝑓𝑓1
𝑓𝑓2 =𝑚𝑚1𝑚𝑚4 − 𝑚𝑚0𝑚𝑚5
𝑚𝑚1 𝑐𝑐2 =
𝑓𝑓1𝑚𝑚5 − 𝑚𝑚1(0)𝑓𝑓1
𝑐𝑐2 = 𝑚𝑚5
𝑠𝑠𝑛𝑛 𝑚𝑚0 𝑚𝑚2 𝑚𝑚4 𝑠𝑠𝑛𝑛−1 𝑚𝑚1 𝑚𝑚3 𝑚𝑚5 𝑠𝑠𝑛𝑛−2 𝑓𝑓1 𝑓𝑓2 0
𝑐𝑐1 𝑐𝑐2 𝑠𝑠0
𝑠𝑠3 1 11 0
𝑠𝑠2 6 6 0
𝑠𝑠1 𝑑𝑑1: 10 𝑑𝑑2: 0
𝑠𝑠0 𝑑𝑑3: 6
Si es estable
R(s) C(s)
jw
𝙛𝙛

“Saber para Ser”
𝑑𝑑1 = (4)(1)−1(16)4
𝑑𝑑1 = −3 𝑑𝑑2 = 4(0)−1(0)
4
𝑑𝑑2 = 0 𝑑𝑑3 = (−3)(16)−4(0)
−3
𝑑𝑑3 = 16
Al existir cambio de signo el Sistema es inestable
P(s) = 𝑠𝑠4 + 2𝑠𝑠3 + 3𝑠𝑠2 + 4𝑠𝑠 + 5 = 0
𝑑𝑑1 =2(3) − 1(4)
2= 1
𝑑𝑑2 = 2(5)−1(0)
2= 5
𝑑𝑑3 = 1(4)−2(5)
1= −6
𝑑𝑑4 = (−6)5−1(0)
−6= 5
Sistema Inestable En el sistema mostrado en la fig. Determinar el rango de los valores que debe tomar el valor de k para garantizar la estabilidad del sistema.
𝑠𝑠3 1 1 0 𝑠𝑠2 4 16 0
𝑠𝑠1 − 3 0
𝑠𝑠0 16
𝑠𝑠4 1 3 5
𝑠𝑠3 2 4 0
𝑠𝑠2 1 5
𝑠𝑠1 − 6 0
𝑠𝑠0 5

“Saber para Ser”
𝐾𝐾𝑠𝑠(𝑠𝑠2 + 𝑠𝑠 + 1)(𝑠𝑠 + 2)
𝐶𝐶(𝑠𝑠)𝑅𝑅(𝑠𝑠)
=
𝑓𝑓𝑠𝑠(𝑠𝑠2 + 𝑠𝑠 + 1)(𝑠𝑠 + 2)
1 + 𝑓𝑓𝑠𝑠(𝑠𝑠2 + 𝑠𝑠 + 1)(𝑠𝑠 + 2)
=𝑓𝑓
𝑠𝑠(𝑠𝑠2 + 𝑠𝑠 + 1)(𝑠𝑠 + 2) + 𝑓𝑓
R(s) = 𝑠𝑠(𝑠𝑠2 + 𝑠𝑠 + 1)(𝑠𝑠 + 2) + 𝑓𝑓
= (𝑠𝑠3 + 𝑠𝑠2 + 𝑠𝑠)(𝑠𝑠 + 2) + 𝑓𝑓
= 𝑠𝑠4 + 𝑠𝑠3 + 𝑠𝑠2 + 2𝑠𝑠3 + 2𝑠𝑠2 + 2𝑠𝑠 + 𝑓𝑓
= 𝑠𝑠4 + 3𝑠𝑠3 + 3𝑠𝑠2 + 2𝑠𝑠 + 𝑓𝑓
𝑠𝑠4 1 3 𝑓𝑓 𝑑𝑑1 = 73
𝑠𝑠3 3 2 0 𝑑𝑑2 = 𝑓𝑓
𝑠𝑠2 𝑑𝑑1 = 73
𝑑𝑑2 = 𝑓𝑓 𝑑𝑑3 = 2 − 97𝑓𝑓
𝑠𝑠1 𝑑𝑑3 = 2−9𝑘𝑘7
𝑑𝑑3 = 0 𝑑𝑑4 = 0
𝑠𝑠0 𝑑𝑑5 = 𝑓𝑓 𝑑𝑑5 = 𝑓𝑓
i. 2 − 97𝑓𝑓 > 0
ii. 𝑓𝑓 > 0 [ 0; +∞ ] 2 − 9
7𝑓𝑓 > 0 0 < k < 14
9
− 97𝑓𝑓 > −2 El sistema será estable
𝑓𝑓 < 149
R (s) C (s)
K(s+2)
(s+3)(𝑠𝑠2 + 2𝑠𝑠 + 2)
0 14
9 1

“Saber para Ser”
𝐶𝐶 (𝑠𝑠)𝑅𝑅 (𝑠𝑠)
=𝑘𝑘(𝑠𝑠+2)
(𝑠𝑠+3)(𝑠𝑠2+2𝑠𝑠+2)
1+ 𝑘𝑘(𝑠𝑠+2)(𝑠𝑠+3)(𝑠𝑠2+2𝑠𝑠+2)
= 𝑘𝑘(𝑠𝑠+2)(𝑠𝑠+3)(𝑠𝑠2+2𝑠𝑠+2)+𝑘𝑘(𝑠𝑠+2)
𝑅𝑅(𝑠𝑠) = (𝑠𝑠 + 3)(𝑠𝑠2 + 2𝑠𝑠 + 2) + 𝑓𝑓(𝑠𝑠 + 2)
= 𝑠𝑠3 + 2𝑠𝑠2 + 2𝑠𝑠 + 3𝑠𝑠2 + 6𝑠𝑠 + 6 + 𝑓𝑓𝑠𝑠 + 2𝑓𝑓
= 𝑠𝑠3 + 5𝑠𝑠2 + 𝑠𝑠(8 + 𝑓𝑓) + (2𝑓𝑓 + 6)
𝑠𝑠3 1 (8+k) 0
𝑠𝑠2 5 (6+2k) 0
𝑠𝑠1 34+3𝑘𝑘5
0
S 6+2k
34+3𝑘𝑘5
> 0 6+2k> 0
34 + 3𝑓𝑓 > 0 2k=-6 3k=-34 k=-3 K=−34
3
−𝟑𝟑𝟒𝟒
𝟑𝟑< 𝐊𝐊 < −𝟑𝟑
𝑠𝑠4 + 𝑠𝑠3 + 𝑠𝑠2 + 2𝑠𝑠 + 𝑓𝑓 = 0
𝑠𝑠4 1 3 k
𝑠𝑠3 1 2 0 sistema estable
𝑠𝑠2 2-k 0 𝑠𝑠0 k 2-k> 0 k> 0; ]0;∞[ -k> −2 k< 2 CASOS ESPECIALES EN EL CRITERIO DE ESTABILIDAD (I CASO)
𝑠𝑠3 + 2𝑠𝑠2 + 5 + 2 = 0 𝑠𝑠3 1 1 𝑠𝑠2 2 2 𝜀𝜀 > 0 𝑠𝑠1 𝜀𝜀 𝑠𝑠0 2

“Saber para Ser”
𝑠𝑠5 + 𝑠𝑠4 + 2𝑠𝑠3 + 2𝑠𝑠2 + 3𝑠𝑠 + 15 = 0 𝑠𝑠5 1 2 3 sistema inestable 𝑠𝑠4 1 2 15 𝑠𝑠3 𝜀𝜀 -12 0 𝑠𝑠2 2𝜀𝜀+12
𝜀𝜀 15 𝜀𝜀 > 0
𝑠𝑠1 −15𝜀𝜀2−−24𝜀𝜀−1442𝜀𝜀+12
0 𝑠𝑠0 2
lim𝜀𝜀→0
2𝜀𝜀 + 12𝜀𝜀
= 2 +120
= 2 + ∞ = +∞
lim𝜀𝜀→0
�−15𝜀𝜀2− − 24𝜀𝜀 − 144
2𝜀𝜀 + 12� = −
14412
= −12
𝑠𝑠5 + 2𝑠𝑠4 + 2𝑠𝑠3 + 4𝑠𝑠2 + 11𝑠𝑠 + 10 = 0
𝑠𝑠5 1 2 11 sistema inestable 𝑠𝑠4 2 4 10 𝑠𝑠3 𝜀𝜀 6 0 𝑠𝑠2 4𝜀𝜀−12
𝜀𝜀 10 𝜀𝜀 > 0
𝑠𝑠1 −10𝜀𝜀2−+24𝜀𝜀−724𝜀𝜀−12
0 𝑠𝑠0 10
lim𝜀𝜀→0
4𝜀𝜀 − 12𝜀𝜀
= 4 −120
= −∞
lim𝜀𝜀→0
�−10𝜀𝜀2− + 24𝜀𝜀 − 72
4𝜀𝜀 − 12 � =
7212
= 6
(II CASO) CUANDO TODOS LOS 𝜀𝜀 DE UNA FILA SON CERO
𝑠𝑠4 + 2𝑠𝑠3 + 7𝑠𝑠2 + 4𝑠𝑠 + 10 = 0 Debemos recurrir al polinomio auxiliar
𝑠𝑠4 1 7 10 P(s)= 5𝑠𝑠2 + 10 o 5𝑠𝑠2 + 10 = 0
𝑠𝑠3 2 4 0 𝑑𝑑[𝑃𝑃(𝑠𝑠) ]𝑑𝑑𝑠𝑠
= 10𝑠𝑠 𝑠𝑠2 = −105
𝑠𝑠2 5 10 𝑠𝑠2 = −2
𝑠𝑠1 10 0 𝑠𝑠 = ±√2𝑗𝑗
𝑠𝑠0 10
P(s)

“Saber para Ser”
Estable
𝑠𝑠5 + 2𝑠𝑠4 + 24𝑠𝑠3 + 48𝑠𝑠2 − 25𝑠𝑠 − 50 = 0
𝑠𝑠5 1 24 − 25 𝑃𝑃(𝑠𝑠) = 2𝑠𝑠4 + 48𝑠𝑠2 − 50
𝑠𝑠4 2 48 − 50 𝑑𝑑[ 𝑃𝑃(𝑠𝑠)]𝑑𝑑𝑠𝑠
= 8𝑠𝑠3 + 96𝑠𝑠
𝑠𝑠3 8 96 0
𝑠𝑠2 24 − 50
𝑠𝑠1 112,7 0 Inestable
𝑠𝑠0 − 50
2𝑠𝑠5 + 12𝑠𝑠4 + 𝑠𝑠3 + 6𝑠𝑠2 + 3𝑠𝑠 + 18 = 0
𝑠𝑠5 2 1 3 P(s)= 12𝑠𝑠4 + 6𝑠𝑠2 + 18
𝑠𝑠4 12 6 18 𝑑𝑑 [ 𝑃𝑃(𝑠𝑠) ]𝑑𝑑𝑠𝑠
= 48𝑠𝑠3 + 12𝑠𝑠
𝑠𝑠3 48 12 0
𝑠𝑠2 3 18
𝑠𝑠1 − 276 0
𝑠𝑠0 18 Inestable
VERIFICAR LA ESTABILIDAD DE LOS SIGUIENTES SISTEMAS
𝑓𝑓𝑠𝑠(𝑠𝑠 + 1)(𝑠𝑠 + 2)
1 + 𝑓𝑓𝑠𝑠(𝑠𝑠 + 1)(𝑠𝑠 + 2)
=𝑓𝑓
𝑠𝑠3 + 3𝑠𝑠2 + 2𝑠𝑠 + 𝑓𝑓
𝑠𝑠3 + 3𝑠𝑠2 + 2𝑠𝑠 + 𝑓𝑓 = 0
𝑠𝑠3 1 2 6−𝑘𝑘3
> 0 K > 0 k > 0: [0;+ ∞ ] 0 < k < 6
P(s)
𝑓𝑓𝑠𝑠(𝑠𝑠 + 1)(𝑠𝑠 + 2)
∞
C(s) R(s)

“Saber para Ser”
𝑠𝑠2 3 𝑓𝑓 6-k >0
𝑠𝑠1 6−𝑘𝑘3
0 -k > -6
𝑠𝑠0 𝑓𝑓 K < 6
Estable
10𝑠𝑠(𝑠𝑠 − 1)(2𝑠𝑠 + 3)
1 + 10𝑠𝑠(𝑠𝑠 − 1)(2𝑠𝑠 + 3)
=10
2𝑠𝑠3 + 𝑠𝑠2 − 3𝑠𝑠 + 10
2𝑠𝑠3 + 𝑠𝑠2 − 3𝑠𝑠 + 10 = 0
𝑠𝑠3 2 − 3
𝑠𝑠2 1 10
𝑠𝑠1 − 23 0
𝑠𝑠0 10 Inestable
LUGAR GEOMÉTRICO
Nos permite observar cual es el comportamiento
G(s)= 𝑘𝑘𝑠𝑠(𝑠𝑠+7)
𝐻𝐻(𝑠𝑠) = 1
0 6
10𝑠𝑠(𝑠𝑠 − 1)(2𝑠𝑠 + 3)
R(s) C(s)
𝑓𝑓𝑠𝑠(𝑠𝑠 + 7)

“Saber para Ser”
𝐺𝐺(𝑠𝑠)𝐻𝐻(𝑠𝑠) = 𝑘𝑘𝑠𝑠(𝑠𝑠+7)
𝑠𝑠(𝑠𝑠 + 7) = 0
S1=0
S2=-7
𝐺𝐺(𝑠𝑠)𝑅𝑅(𝑠𝑠) =
𝑓𝑓𝑠𝑠(𝑠𝑠 + 7)
1 + 𝑓𝑓𝑠𝑠(𝑠𝑠 + 7)
=𝑓𝑓
𝑠𝑠(𝑠𝑠 + 7) + 𝐾𝐾
𝑠𝑠2 + 7𝑠𝑠 + 𝑓𝑓 = 0
𝑆𝑆1,2 =−7 ± √72 − 4𝑓𝑓
2
K 𝑺𝑺𝟏𝟏 𝑺𝑺𝟐𝟐 1 -0.10 -6.89 5 -0.80 -6.19 10 -2 -5 20 -3.5+2.8j -3.5-2.8j
37.25 -3.5+5j -3.5-2.8j 48.25 -3.5+6j -3.5-2.8j 76.25 -3.5+8j -3.5-2.8j 93.25 -3.5+9j -3.5-2.8j
112.25 -3.5+10j -3.5-2.8j
Ecuacion caracteristica

“Saber para Ser”
1 + 𝐺𝐺(𝑠𝑠)𝐻𝐻(𝑠𝑠) = 0
𝐺𝐺(𝑠𝑠)𝐻𝐻(𝑠𝑠) = −1
|𝐺𝐺(𝑠𝑠)𝐻𝐻(𝑠𝑠)| = |−1| = 1
°𝐺𝐺(𝑠𝑠)𝐻𝐻(𝑠𝑠) = 180° + 360°(2𝑓𝑓)
K∈ 𝑁𝑁 0,1,2,3 … ….
𝜎𝜎1 + 𝜎𝜎2 = 180°
𝐴𝐴1 = �(−3.5 + 7)2 + (10 − 0)2 = 10.59
𝐴𝐴2 = �(−3.5 − 0)2 + (10 − 0)2 = 10.59
�𝑓𝑓
𝐴𝐴1 𝐴𝐴2� = 1
�112.25
10.59 10.59� = 1
𝜎𝜎2 = tan−1103.5
= 70.7°
𝜎𝜎1 = 180° − 𝜎𝜎2 = 180° − 70.7° = 109.3°
Analisar la funcion de transferencia del siguente sistema
1) Polos y ceros
𝐺𝐺(𝑠𝑠) =𝑓𝑓
𝑠𝑠 (𝑠𝑠 + 1)(𝑠𝑠 + 2)
𝐻𝐻(𝑠𝑠)= 1
𝐺𝐺(𝑠𝑠)𝐻𝐻(𝑠𝑠) =𝑓𝑓
𝑠𝑠 (𝑠𝑠 + 1)(𝑠𝑠 + 2)
𝑠𝑠 (𝑠𝑠 + 1)(𝑠𝑠 + 2) = 0 𝑆𝑆1 =0

“Saber para Ser”
𝑆𝑆2 =-1 𝑆𝑆3 =-2
2) Numero de ramas
𝑁𝑁 = #𝐴𝐴𝑖𝑖𝑖𝑖𝑖𝑖𝑠𝑠 − #𝑐𝑐𝑒𝑒𝑎𝑎𝑖𝑖𝑠𝑠
𝑁𝑁 = 3 − 0 𝑁𝑁 = 3
3) Ubicación de centroide
𝛿𝛿0 =∑𝐴𝐴𝑖𝑖𝑖𝑖𝑖𝑖𝑠𝑠 − ∑𝑧𝑧𝑒𝑒𝑎𝑎𝑖𝑖𝑠𝑠
𝑁𝑁
𝛿𝛿0 =(0 − 1 − 2) − 0
3
𝛿𝛿0 = −1
4) Angulo de ramas
𝜎𝜎0 =180 (2(0) + 1)
3= 60°
𝜎𝜎1 =180 (2(1) + 1)
3= 180°
𝜎𝜎2 =180 (2(2) + 1)
3= 300°
5) Punto de quiebre
𝐶𝐶(𝑠𝑠)𝑅𝑅(𝑠𝑠) =
𝑓𝑓𝑠𝑠 (𝑠𝑠 + 1)(𝑠𝑠 + 2) + 𝑓𝑓
𝐶𝐶(𝑠𝑠)𝑅𝑅(𝑠𝑠) =
𝑓𝑓𝑠𝑠3 + 3𝑠𝑠2 + 2𝑠𝑠 + 𝑓𝑓
𝑠𝑠3 + 3𝑠𝑠2 + 2𝑠𝑠 + 𝑓𝑓 = 0 𝑓𝑓 = −𝑠𝑠3 − 3𝑠𝑠2 − 2𝑠𝑠 𝑑𝑑𝑓𝑓𝑑𝑑𝑠𝑠
= −3𝑠𝑠2 − 6𝑠𝑠 − 2
𝑠𝑠2 + 𝑠𝑠 +23
= 0
𝑠𝑠2 + 2𝑠𝑠 + 1 = −23
+ 1
(𝑠𝑠 + 1)2 =13
S+1 = ±�13
𝑆𝑆1 = −0.42 𝑆𝑆2 = −1.57
6) Corte (jw)

“Saber para Ser”
𝑠𝑠3 + 3𝑠𝑠2 + 2𝑠𝑠 + 𝑓𝑓 = 0 (𝑗𝑗𝑑𝑑)3 + 3(𝑗𝑗𝑑𝑑)2 + 2(𝑗𝑗𝑑𝑑) + 𝑓𝑓 = 0 −𝑗𝑗𝑑𝑑3 − 3𝑑𝑑2 + 2𝑗𝑗𝑑𝑑 + 𝑓𝑓 = 0
7) Real -3𝑑𝑑2 + 𝑓𝑓 = 0 K= 3𝑑𝑑2 K=6
imaginario −𝑗𝑗𝑑𝑑3 + 2𝑗𝑗𝑑𝑑 = 0 −𝑑𝑑3 = −2𝑑𝑑 𝑑𝑑 = ± − √2j

“Saber para Ser”
1) Polos y ceros
𝐺𝐺(𝑠𝑠)𝐻𝐻(𝑠𝑠) =𝑓𝑓
𝑠𝑠(𝑠𝑠 + 4)(𝑠𝑠2 + 8𝑠𝑠 + 32)
𝑠𝑠(𝑠𝑠 + 4)(𝑠𝑠2 + 8𝑠𝑠 + 32) 𝑆𝑆1 =0 𝑆𝑆2 =-4 𝑆𝑆3 = −4 + 4𝑗𝑗 𝑆𝑆4 = −4 − 4𝑗𝑗 2) Numero de ramas
𝑁𝑁 = #𝐴𝐴𝑖𝑖𝑖𝑖𝑖𝑖𝑠𝑠 − #𝑐𝑐𝑒𝑒𝑎𝑎𝑖𝑖𝑠𝑠
𝑁𝑁 = 4 − 0 𝑁𝑁 = 4 3) Ubicación de centroide
𝛿𝛿0 =∑𝐴𝐴𝑖𝑖𝑖𝑖𝑖𝑖𝑠𝑠 − ∑𝑧𝑧𝑒𝑒𝑎𝑎𝑖𝑖𝑠𝑠
𝑁𝑁
𝛿𝛿0 =(0 − 4 − 4 − 4) − 0
4
𝛿𝛿0 = −3 4) Angulo de ramas
𝜎𝜎0 =180 (2(0) + 1)
4= 45°
𝜎𝜎1 =180 (2(1) + 1)
4= 135°
𝜎𝜎2 =180 (2(2) + 1)
4= 225°
𝜎𝜎3 =180 (2(3) + 1)
4= 315°
5) Punto de quiebre 𝐶𝐶(𝑠𝑠)𝑅𝑅(𝑠𝑠) = 1 +
𝑓𝑓𝑠𝑠(𝑠𝑠 + 4)(𝑠𝑠2 + 8𝑠𝑠 + 32)
= 0

“Saber para Ser”
𝑠𝑠(𝑠𝑠 + 4)(𝑠𝑠2 + 8𝑠𝑠 + 32) + 𝑓𝑓 = 0 𝑠𝑠4 + 12𝑠𝑠3 + 64𝑠𝑠2 + 128𝑠𝑠 + 𝑓𝑓 = 0 𝑓𝑓 = −𝑠𝑠4 − 12𝑠𝑠3 − 64𝑠𝑠2 − 128𝑠𝑠 𝑑𝑑𝑓𝑓𝑑𝑑𝑠𝑠
= −4𝑠𝑠3 − 36𝑠𝑠2 − 128𝑠𝑠 − 128
−𝑠𝑠3 − 9𝑠𝑠2 − 32𝑠𝑠 − 32 𝑆𝑆1 =-1.58 𝑆𝑆2 =-3.71+2.55j 𝑆𝑆3 = −3.71 + 2.55𝑗𝑗
6) Corte (jw) 𝑠𝑠4 + 12𝑠𝑠3 + 64𝑠𝑠2 + 128𝑠𝑠 + 𝑓𝑓 = 0
(𝑗𝑗𝑑𝑑)4 + 12(𝑗𝑗𝑑𝑑)3 + 64(𝑗𝑗𝑑𝑑)2 + 128(𝑗𝑗𝑑𝑑) + 𝑓𝑓 = 0
𝑑𝑑4 − 12𝑗𝑗𝑑𝑑3 − 64𝑑𝑑2 + 128𝑗𝑗𝑑𝑑 + 𝑓𝑓 = 0 7) Real 𝑑𝑑4-64𝑑𝑑2 + 𝑓𝑓 = 0 K= 64𝑑𝑑2 − 𝑑𝑑4 K=568.88
imaginario −12𝑗𝑗𝑑𝑑3 + 128𝑗𝑗𝑑𝑑 = 0 12𝑑𝑑3 = 128𝑗𝑗𝑑𝑑
𝑑𝑑 = ±�12812
𝑑𝑑1 = 3.26𝑗𝑗 𝑑𝑑2 = −3.26𝑗𝑗

“Saber para Ser”
Trasar el lugar geometrico del siguente sistema
1) Polos y ceros
𝐺𝐺(𝑠𝑠)𝐻𝐻(𝑠𝑠) =𝑓𝑓(𝑠𝑠 + 1)
𝑠𝑠(𝑠𝑠 + 2)(𝑠𝑠 + 3)
𝐴𝐴𝑖𝑖𝑖𝑖𝑖𝑖𝑠𝑠 zeros 𝑠𝑠(𝑠𝑠 + 2)(𝑠𝑠 + 3) (𝑠𝑠 + 1) 𝑆𝑆1 =0 𝑆𝑆1 =-1 𝑆𝑆2 =-2 𝑆𝑆3 = −3 2) Numero de ramas
𝑁𝑁 = #𝐴𝐴𝑖𝑖𝑖𝑖𝑖𝑖𝑠𝑠 − #𝑐𝑐𝑒𝑒𝑎𝑎𝑖𝑖𝑠𝑠
𝑁𝑁 = 3 − 0 𝑁𝑁 = 2 3) Ubicación de centroide
𝛿𝛿0 =∑𝐴𝐴𝑖𝑖𝑖𝑖𝑖𝑖𝑠𝑠 − ∑𝑧𝑧𝑒𝑒𝑎𝑎𝑖𝑖𝑠𝑠
𝑁𝑁
𝛿𝛿0 =(0 − 2 − 3) − (−1)
2
𝛿𝛿0 = −2 4) Angulo de ramas
𝜎𝜎0 =180 (2(0) + 1)
2= 90°
𝜎𝜎1 =180 (2(1) + 1)
2= 270°
5) Punto de quiebre 𝐶𝐶(𝑠𝑠)𝑅𝑅(𝑠𝑠) = 1 +
𝑓𝑓(𝑠𝑠 + 1)𝑠𝑠(𝑠𝑠 + 2)(𝑠𝑠 + 3)
= 0
𝑠𝑠(𝑠𝑠 + 2)(𝑠𝑠 + 3) + 𝑓𝑓(𝑠𝑠 + 1)𝑠𝑠(𝑠𝑠 + 2)(𝑠𝑠 + 3)
=
𝑠𝑠(𝑠𝑠 + 2)(𝑠𝑠 + 3) + 𝑓𝑓(𝑠𝑠 + 1) = 0

“Saber para Ser”
𝑓𝑓 =𝑠𝑠(𝑠𝑠 + 2)(𝑠𝑠 + 3)
(𝑠𝑠 + 1)
𝑓𝑓 = −𝑠𝑠3 − 5𝑠𝑠2 + 6𝑠𝑠
(𝑠𝑠 + 1)
𝑑𝑑𝑓𝑓𝑑𝑑𝑠𝑠
= −(𝑠𝑠 + 1)(𝑠𝑠3 − 5𝑠𝑠2 + 6𝑠𝑠)′ − (𝑠𝑠3 − 5𝑠𝑠2 + 6𝑠𝑠)(𝑠𝑠 + 1)′
(𝑠𝑠 + 1)2 = 0
𝑑𝑑𝑓𝑓𝑑𝑑𝑠𝑠
= (𝑠𝑠 + 1)(3𝑠𝑠2 + 10𝑠𝑠 + 6) − (𝑠𝑠3 − 5𝑠𝑠2 + 6𝑠𝑠) = 0
K’=𝑠𝑠3 + 4𝑠𝑠2 + 5𝑠𝑠 + 3 = 0 𝑆𝑆1 =-2.46 𝑆𝑆2 =-0.76+0.79j 𝑆𝑆3 = −0.76 − 0.79j