Sistemas de Control y Proceso Adaptativo. Diseño y métodos y estrategias de control
Upload
frann-luqueCategory
view
750download
0
Control AdaptativoSistemas de Control

Introducción
Control Adaptativo

1950 - Inicio Se inicia la investigación en control adaptativo a causa del
diseño de controles de piloto automático para aviones, con
dinámica variable de viento y altitud.
El control realimentado de ganancia constante solo
funcionaba en un rango de operación.
Surge la necesidad de un control que barriera el espectro del
rango de operaciones, llegando a una técnica de esquema
de ganancia por rangos.

1960 – 1970 – 1980 Se presentan avances en teoría de control, como descripción
de espacio de estado, teoría de la estabilidad y
programación dinámica.
Se realizan pruebas en la estabilidad de los sistemas
adaptativos conocidos hasta la fecha.
Los investigadores avanzan en los conceptos de control
robusto y la robustez del control adaptativo comienza a
emplearse para uso comercial.

Actualidad Los avances en control adaptativo tienden hacia los
conceptos de aprendizaje y ciencia computacionales.
Los progresos en microelectrónica han estimulado el
desarrollo del control adaptativo.
Hoy en día la mayoría de los controles permiten el ajuste de
parámetros de alguna manera, siendo un tema de
investigación de amplio interés.

Primeras Nociones El termino Adaptativo significa cambiar el comportamiento
conforme a nuevas circunstancias.
Un Regulador Adaptativo es un regulador que puede
modificar su comportamiento en respuesta a cambios en la
dinámica del sistema y a las perturbaciones.
Este mismo objetivo es el de la inclusión de la realimentación
en el bucle de control, por lo que surge la pregunta:
“¿Cuál es la diferencia entre Control Realimentado y
Control Adaptativo?”

Desarrollo
Control Adaptativo

Definición Es un tipo especial de control el cual consiste en Adaptar
Parámetros Variables de un proceso en tiempo real a fin de
mantener un funcionamiento adecuado en un sistema con
una Realimentación no Lineal.

Escalas de Tiempo El Estado del Proceso puede ser separado en dos escalas
de tiempo, que evolucionan a diferente velocidad:
La Escala Lenta (Lazo Secundario) corresponde a los
cambios de los parámetros y por consiguiente a la velocidad
con la cual los parámetros del regulador son modificados.
En cambio, la Escala Rápida (Lazo Primario) corresponde
a la dinámica del bucle ordinario de realimentación.

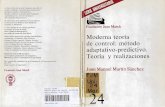
Composición Bucle Principal de Realimentación Negativa: Actúa al
igual que en los sistemas convencionales.
Bucle Secundario: Se mide un cierto índice de funcionamiento (Identificador), el cual es comparado con un Criterio de Adaptación (Comparador de Señales) y se procesa el error en un Mecanismo de Adaptación que ajusta los Parámetros del Controlador y en algunos casos actúa directamente sobre la señal de control.
Mecanismo de Adaptación: Presenta una solución en tiempo real al problema de diseño para sistemas con parámetros conocidos.

Control Adaptativo Típico
u(t)e(t)m(t)Ref.
Parámetros
Actualizados
Sensor
Lazo Primario
Comparador
de Criterios
Planta
Identificador
Criterio de
Adaptación
Lazo
Secundario
Perturbaciones
Mecanismo de
Adaptación
Controlador
Ajustable

Control Adaptativo con
Bucle Abierto Existen muchos tipos de controladores que proporcionan
buenas características de regulación en presencia de
cambios de los parámetros del sistema y que según la
definición anterior no son realmente adaptativos, puesto que
la adaptación se realiza en Bucle Abierto.
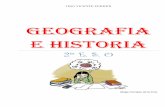
Cambio por Tabla: Consiste en la modificación de los
parámetros del controlador a partir de una tabla que ha sido
calculada previamente para distintos puntos de
funcionamiento, en función de una Variable Auxiliar.

Control Adaptativo con
Bucle Abierto
u(t)e(t)m(t)Ref.
Mecanismo de
Adaptación
Medición de
Variables
Variable
Auxiliar
Controlador
AjustablePlanta
Perturbaciones
Parámetros
Actualizados

Tener en Cuenta Es muy importante explorar bajo qué circunstancias es
insuficiente utilizar un controlador fijo y será necesario un
controlador adaptativo
Un controlador convencional está pensado para controlar
sistemas cuyos parámetros permanecen constantes.
Cuando se pretende regular un sistema en un punto fijo de
operación, en la mayoría de los casos, se obtiene una buena
aproximación.
Sin embargo, si el punto de funcionamiento cambia, la
aproximación en torno a este punto no seguirá siendo buena.
Es muy importante recordar que la utilización de un
controlador adaptativo no sustituye el buen conocimiento del
proceso que es necesario para elegir las especificaciones, la
estructura del controlador y el método de diseño.

Aplicaciones Muchos problemas de aplicación práctica que no pueden
resolverse mediante el uso de filtros digitales de coeficientes
fijos, pueden ser resueltos con éxito mediante el uso
especial de filtros "Inteligentes", conocidos colectivamente
como filtros adaptativos.
Los coeficientes adaptativos en el diseño del filtro permiten
modificar la respuesta del éste durante su operación
mejorando su rendimiento sin intervención del usuario.

Tipos
Control Adaptativo

EJEMPLO En el diseño de un robot, se le suelen aportar controladores
adaptativos para que estén en capacidad de responder a
situaciones a las que tengan que enfrentarse.

Control Adaptativo
Programado (Gain Scheduling) Consiste en programar una lista completa de:
“Si ocurre (_____) entonces haz (_____).”
Esto supone que se puede anticipar en el momento del
diseño todas las posibles situaciones que se puede
encontrar el robot y se le van a especificar todas las posibles
soluciones.
El sistema no tiene que pensar ni tomar decisiones.
Requiere del conocimiento previo para su implementación.

Control Adaptativo
Programado (Gain Scheduling)
u(t)e(t)m(t)Ref.
Ajuste de
Parámetros
Controlador
AjustablePlanta
Perturbaciones
Parámetros
Actualizados

Control Adaptativo con
Modelo de Referencia (MRAC) Consiste en ofrecerle al robot un buen modelo de referencia
para solucionar las situaciones a las que deba enfrentarse.
Por ejemplo:
“Seguir las decisiones de un humano modelo.”
Esto supone que debe seguir a su modelo, tendrá una
capacidad de decisión, pero está restringida al objetivo.
Intentan alcanzar para una señal de entrada definida, un
comportamiento en bucle cerrado dado por un modelo de
referencia.

Control Adaptativo con
Modelo de Referencia (MRAC)
u(t)e1(t)m(t)Ref.
Mecanismo
de Adaptación
Controlador
AjustablePlanta
Perturbaciones
Parámetros
Actualizados
Modelo de
Referencia
e2(t)

Control Adaptativo
Auto-ajustable (STR) Consiste en diseñar al robot un módulo de estimación de
parámetros que le permitan evaluar la situación y tomar
decisiones en función de reglas generales:
“Si la situación es (_____), entonces haz (_____)”
Tiene una capacidad de decisión, pero está restringida al
objeto de modelo y es mas peligroso de caer en
estabilidad, en caso de una evaluación incorrecta.
Tratan de alcanzar un control óptimo, sujeto a un tipo de
controlador y a obtener información del proceso y sus
señales.

Control Adaptativo
Auto-ajustable (STR)
u(t)e(t)m(t)Ref.
Controlador
AjustablePlanta
Perturbaciones
Parámetros
ActualizadosEstimador de
Parámetros
Diseño del
Controlador
Criterio de
Adaptación

Conclusión Hemos podido observar las razones por las cuales los
controladores adaptativos son necesarios en el uso de los
sistemas físicos:
Por la dinámica variable del proceso.
Por las características de las perturbaciones.
Para la optimización del diseño en Ingeniería.
Finalmente podemos concluir que el concepto Adaptativo
estudiado presenta puntos en común con el concepto de
control inteligente y aprendizaje.
![CONTROL ADAPTATIVO SOBRE UN SISTEMA DE … · de un control adaptativo, ... software Matlab, igual que los sistemas de control basados en un control adaptativo [3], [2]. 4 ...](https://static.fdocuments.ec/doc/165x107/5b155ad97f8b9afb0a8bce45/control-adaptativo-sobre-un-sistema-de-de-un-control-adaptativo-software.jpg)