Apago PDF Enhancer · An alisis Cinem atico de Mecanismos Mediante Adams c y su Comparaci on con...
10
An´ alisis Cinem´atico de Mecanismos Mediante Adams c y su Comparaci´ on con Maple c . Jos´ e Mar´ ıa Rico Mart´ ınez Departamento de Ingenier´ ıa Mec´ anica. Divisi´ on de Ingenier´ ıas. Campus Irapuato-Salamanca. Universidad de Guanajuato CP 36885, Salamanca, Gto., M´ exico E-mail: [email protected] 1 Introducci´ onyMotivaci´on. En este apunte se mostrar´ a como realizar el an´ alisis cinem´ atico de mecanismos, empleando el programa Adams c y su comparaci´ on con otras herramientas, como por ejemplo el programa de matem´ atica simb´ olica Maple c . Como un subproducto de esta comparaci´ on se obtiene la conclusi´ on de que es importante siempre revisar y cuestionar los resultados obtenidos mediante programas de computadora en los que el usuario no tiene control sobre la operaci´ on del programa y el programa se emplea como una “caja negra” en la cual se introducen datos y se obtienen resultados. Como ejemplo se resolver´ a el problema 176, del cap´ ıtulo 15, del libro “Vector Mechanics for Engineers: Statics and Dynamics. Beer, F.P., Johnston Jr. E. R., Mazurek, D. F. Cornwell, F.J. y Eisenberg, E. R., McGraw Hill. New York, 2009”. Es importante notar que este problema involucra el an´ alisis de aceleraci´ on Coriolis, un tema considerado “dificil” por la mayoria de los estudiantes de ingenier´ ıa mec´ anica y mecatr´ onica. El enunciado del problema es el siguiente: Sabiendo que en el instante mostrado la barra conectada al punto B gira con una velocidad angular constante en sentido antihorario de 6 rad/s, determine las velocidad angular y la aceleraci´ on angular de la barra conectada a A. A B D 30 0.4 m Fig. P15.176 Figure 1: Problema n´ umero 176, cap´ ıtulo 15, Beer y Johnston, Ninth Edition. 1
Transcript of Apago PDF Enhancer · An alisis Cinem atico de Mecanismos Mediante Adams c y su Comparaci on con...

Analisis Cinematico de Mecanismos Mediante Adams c© y su
Comparacion con Maple c©.
Jose Marıa Rico MartınezDepartamento de Ingenierıa Mecanica.
Division de Ingenierıas. Campus Irapuato-Salamanca.Universidad de Guanajuato
CP 36885, Salamanca, Gto., MexicoE-mail: [email protected]
1 Introduccion y Motivacion.
En este apunte se mostrara como realizar el analisis cinematico de mecanismos, empleando el programa Adams c©y su comparacion con otras herramientas, como por ejemplo el programa de matematica simbolica Maple c©. Comoun subproducto de esta comparacion se obtiene la conclusion de que es importante siempre revisar y cuestionar losresultados obtenidos mediante programas de computadora en los que el usuario no tiene control sobre la operacion delprograma y el programa se emplea como una “caja negra” en la cual se introducen datos y se obtienen resultados.
Como ejemplo se resolvera el problema 176, del capıtulo 15, del libro “Vector Mechanics for Engineers: Staticsand Dynamics. Beer, F.P., Johnston Jr. E. R., Mazurek, D. F. Cornwell, F.J. y Eisenberg, E. R., McGraw Hill. NewYork, 2009”. Es importante notar que este problema involucra el analisis de aceleracion Coriolis, un tema considerado“dificil” por la mayoria de los estudiantes de ingenierıa mecanica y mecatronica.
El enunciado del problema es el siguiente: Sabiendo que en el instante mostrado la barra conectada al punto B giracon una velocidad angular constante en sentido antihorario de 6 rad/s, determine las velocidad angular y la aceleracionangular de la barra conectada a A.
Apago PDF Enhancer
982 Kinematics of Rigid Bodies 15.172 The collar P slides outward at a constant relative speed u along rod AB, which rotates counterclockwise with a constant angular velocity of 20 rpm. Knowing that r 5 250 mm when u 5 0 and that the collar reaches B when u 5 90°, determine the magnitude of the acceleration of the collar P just as it reaches B.
A
B
P
u
ww
q
500 mmr
Fig. P15.172
15.173 Pin P slides in a circular slot cut in the plate shown at a constant relative speed u 5 90 mm/s. Knowing that at the instant shown the plate rotates clockwise about A at the constant rate v 5 3 rad/s, determine the acceleration of the pin if it is located at (a) point A, (b) point B, (c) point C.
A
B
C
Pu
100 mm
ww
Fig. P15.173 and P15.174
15.174 Pin P slides in a circular slot cut in the plate shown at a constant relative speed u 5 90 mm/s. Knowing that at the instant shown the angular velocity V of the plate is 3 rad/s clockwise and is decreasing at the rate of 5 rad/s2, determine the acceleration of the pin if it is located at (a) point A, (b) point B, (c) point C.
15.175 and 15.176 Knowing that at the instant shown the rod attached at B rotates with a constant counterclockwise angular velocity VB of 6 rad/s, determine the angular velocity and angular acceleration of the rod attached at A.
A B
D
30�
0.4 m
Fig. P15.175
A B
D
30�
0.4 m
Fig. P15.176
bee29400_ch15_0914-1023.indd Page 982 12/14/08 9:27:50 AM user-s172bee29400_ch15_0914-1023.indd Page 982 12/14/08 9:27:50 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
Figure 1: Problema numero 176, capıtulo 15, Beer y Johnston, Ninth Edition.
1

2 Solucion empleando Maple c©.
En esta seccion, el problema se resolvera empleando el programa de matematica simbolica Maple c©. El primer pasoconsiste en determinar los vectores de posicion de D respecto de B y respecto de A, ademas de un vector unitario enla direccion y sentido de B a D.
~rD/B =[
0 −2/15√
3 0]
~rD/A =[
2/5 −2/15√
3 0]
uBD =[
0 −1 0]
De manera semejante se definiran las velocidades y aceleraciones angulares de las barras o eslabones 2 = BD y 4 = AD
~ω2 =[
0 0 ω2
]~ω4 =
[0 0 6
]~α2 =
[0 0 α2
]~α4 =
[0 0 0
]2.1 Analisis de Velocidad.
La ecuacion vectorial que resuelve el analisis de velocidad del mecanismo esta dada por
~vDOXY Z = ~vDoxyz + ~ω4 × ~rD/B
donde OXY Z es un sistema de referencia fijo al eslabon fijo y oxyz es un sistema de referencia movil, con origen enel punto B y sujeto a la misma rotacion que la barra 2 = BD. Por lo tanto
~vDOXY Z = ~ω2 × ~rD/A y ~vDoxyz = v uBD
Consiguientemente, la ecuacion vectorial final esta dada por
~ω2 × ~rD/A = v uBD + ~ω4 × ~rD/B
Sustituyendo las componentes cartesianas de estos vectores se tiene que[0 0 ω2
]×[
2/5 −2/15√
3 0]
= v[
0 −1 0]
+[
0 0 6]×[
0 −2/15√
3 0]
Las ecuaciones escalares, asociadas a las componentes x y y estan dadas por
2/15ω2
√3− 4/5
√3 = 0 2/5ω2 + v = 0.
La solucion de este sistema esta dado por ω2 = 6 rad/s y v = − 125 m/s. De forma vectorial, se tiene que
~ω2 =[
0 0 6]
~vDoxyz = v uBD =[
0 125 0
]Debe notarse que ~vDoxyz es necesaria para calcular la componente Coriolis de aceleracion.
2.2 Analisis de Aceleracion.
La ecuacion vectorial que resuelve el analisis de aceleracion del mecanismo esta dada por
~aDOXY Z = ~aDoxyz + ~α4 × ~rD/B + ~ω4 ×(~ω4 × ~rD/B
)+ 2 ~ω4 × ~vDoxyz
donde OXY Z es un sistema de referencia fijo al eslabon fijo y oxyz es un sistema de referencia movil, con origen enel punto B y sujeto a la misma rotacion que la barra 2 = BD. El ultimo termino de la ecuacion es la componenteCoriolis de aceleracion. Esta componente Coriolis esta dada por
ACoriolis = 2 ~ω4 × ~vOxyz = −28.8m/s2 i
Este resultado es muy relevante para la discusion de los resultados.Por lo tanto
~aDOXY Z = ~α2 × ~rD/A + ~ω2 ×(~ω2 × ~rD/A
)y ~aDoxyz = a uBD
Usando el concepto de placa representativa, la ecuacion vectorial final esta dada por
~α2 × ~rD/A − ω22 ~rD/A = a uBD + ~α4 × ~rD/B − ω2
4 ~rD/B + 2 ~ω4 × ~vDoxyz
2

Donde debe notarse ademas que ~α4 = ~0. Sustituyendo las componentes cartesianas de estos vectores se tiene que[0 0 α2
]×[
2/5 −2/15√
3 0]− (6)2
[2/5 −2/15
√3 0
]=
a[
0 −1 0]− (6)2
[0 −2/15
√3 0
]+ 2
[0 0 6
]×[
0 125 0
]Las ecuaciones escalares, asociadas a las componentes x y y estan dadas por
2/15α2
√3 +
72
5= 0 2/5α2 + a = 0.
La solucion de este sistema esta dado por α2 = −36√
3 = −62.35382909 rad/s2 y a = 72√3
5 m/s2 = 24.94153164m/s2.De forma vectorial, se tiene que
~α2 =[
0 0 −36√
3]
~aDoxyz = a uBD =[
0 − 72√3
5 0]
Estos resultados coinciden con los reportados en el libro.
3 Simulacion del Mecanismo en Adams c©.
En esta seccion se presenta la simulacion del mecanismo, mediante el programa Adams c©. Una mejor presentacion delos resultados requiere que el mecanismo se modele en un programa de modelado solido, como Inventor c©, SolidWorks c©o Catia c©. El modelo solido se exporta en un formato que permita reconocer la geometrıa y ensamble de los diferenteseslabones del mecanismo.
Una vez en Adams c©, es posible colocar los pares cinematicos y el movimiento del eslabon motriz. Debe notarseque por default, Adams c© coloca el mecanismo en el plano X − Y , de manera que las velocidades angulares siempretendran la direccion del eje Z.
Figure 2: Modelo en Adams c© del problema numero 176, capıtulo 15, Beer y Johnston, Ninth Edition.
El modelo incluye varios tipos de conectores, vea la figura 2. Existe un conector con un ıcono en forma de candado,este conector une rıgidamente al piso —ground— el eslabon o barra horizontal, parte 2, que actuara como eslabon fijoo bastidor del mecanismo. Ademas, el modelo incluye tres pares de revoluta y un par prismatico.
3

1. La revoluta —o joint— 2, que conecta el eslabon o barra horizontal, parte 2, con el eslabon o barra inclinada,parte 5.
2. La revoluta —o joint— 3, que conecta el eslabon o inclinada, parte 5, con el colların verde, parte 4.
3. La revoluta —o joint— 4, que conecta el eslabon o barra horizontal, parte 2, con el eslabon o barra vertical,parte 3.
4. El par prismatico —o joint— 5, que conecta el eslabon o barra vertical, parte 3, con el colların verde, parte 4.
Es tambien importante notar que cada par, sea de revoluta o prismatico, requiere dos sistemas de referencia —markers— con un origen comun y direcciones comunes, cada uno de los dos sistemas de referencia esta localizado encada uno de los dos eslabones que se conectan mediante el par —o joint— correspondiente.
Figure 3: Datos del movimiento del modelo en Adams c© del problema numero 176, capıtulo 15, Beer y Johnston,Ninth Edition.
La figura 3 muestra las caracterısticas del movimiento asociado a la revoluta —o joint— 4, que conecta el eslabon obarra horizontal, parte 2, con el eslabon o barra vertical, parte 3. Como muestra la figura 3 el movimiento es rotacional,como debe ser para un par de revoluta con una velocidad angular de 6 rad/s. Debe notarse que esta velocidad tieneun signo negativo, por una razon que no encuentro explicacion, Adams c© considera positivas, exclusivamente parala tarea de modelado, las velocidades y aceleraciones angulares en la direccion horaria. Como se indico al inicio delapunte, la velocidad angular del eslabon o barra vertical, parte 3, es de 6 rad/s en sentido antihorario, por lo que esnecesario el signo negativo.
Se desea programar una revolucion del mecanismo, el tiempo necesario esta dado pot
∆ t =2π rad
6 rad/s= 1.04719 seg.
Un numero razonable de pasos —steps— para la simulacion sera de 1047 pasos, de manera que cada paso representauna milesima de segundo. Estas selecciones se pueden observar en la figura 4. Una vez realizada la simulacion esposible grabar un video de la simulacion del mecanismo. Esta grabacion confirma que el movimiento asociado a la
4
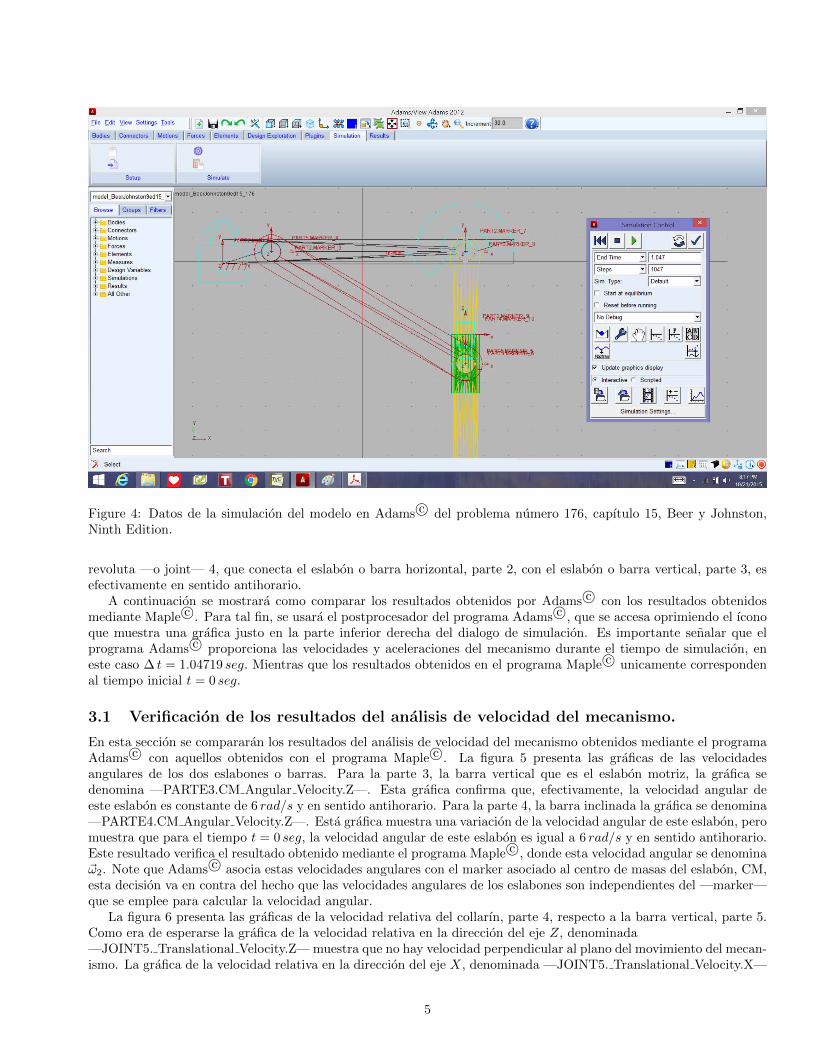
Figure 4: Datos de la simulacion del modelo en Adams c© del problema numero 176, capıtulo 15, Beer y Johnston,Ninth Edition.
revoluta —o joint— 4, que conecta el eslabon o barra horizontal, parte 2, con el eslabon o barra vertical, parte 3, esefectivamente en sentido antihorario.
A continuacion se mostrara como comparar los resultados obtenidos por Adams c© con los resultados obtenidosmediante Maple c©. Para tal fin, se usara el postprocesador del programa Adams c©, que se accesa oprimiendo el ıconoque muestra una grafica justo en la parte inferior derecha del dialogo de simulacion. Es importante senalar que elprograma Adams c© proporciona las velocidades y aceleraciones del mecanismo durante el tiempo de simulacion, eneste caso ∆ t = 1.04719 seg. Mientras que los resultados obtenidos en el programa Maple c© unicamente correspondenal tiempo inicial t = 0 seg.
3.1 Verificacion de los resultados del analisis de velocidad del mecanismo.
En esta seccion se compararan los resultados del analisis de velocidad del mecanismo obtenidos mediante el programaAdams c© con aquellos obtenidos con el programa Maple c©. La figura 5 presenta las graficas de las velocidadesangulares de los dos eslabones o barras. Para la parte 3, la barra vertical que es el eslabon motriz, la grafica sedenomina —PARTE3.CM Angular Velocity.Z—. Esta grafica confirma que, efectivamente, la velocidad angular deeste eslabon es constante de 6 rad/s y en sentido antihorario. Para la parte 4, la barra inclinada la grafica se denomina—PARTE4.CM Angular Velocity.Z—. Esta grafica muestra una variacion de la velocidad angular de este eslabon, peromuestra que para el tiempo t = 0 seg, la velocidad angular de este eslabon es igual a 6 rad/s y en sentido antihorario.Este resultado verifica el resultado obtenido mediante el programa Maple c©, donde esta velocidad angular se denomina~ω2. Note que Adams c© asocia estas velocidades angulares con el marker asociado al centro de masas del eslabon, CM,esta decision va en contra del hecho que las velocidades angulares de los eslabones son independientes del —marker—que se emplee para calcular la velocidad angular.
La figura 6 presenta las graficas de la velocidad relativa del colların, parte 4, respecto a la barra vertical, parte 5.Como era de esperarse la grafica de la velocidad relativa en la direccion del eje Z, denominada—JOINT5. Translational Velocity.Z— muestra que no hay velocidad perpendicular al plano del movimiento del mecan-ismo. La grafica de la velocidad relativa en la direccion del eje X, denominada —JOINT5. Translational Velocity.X—
5
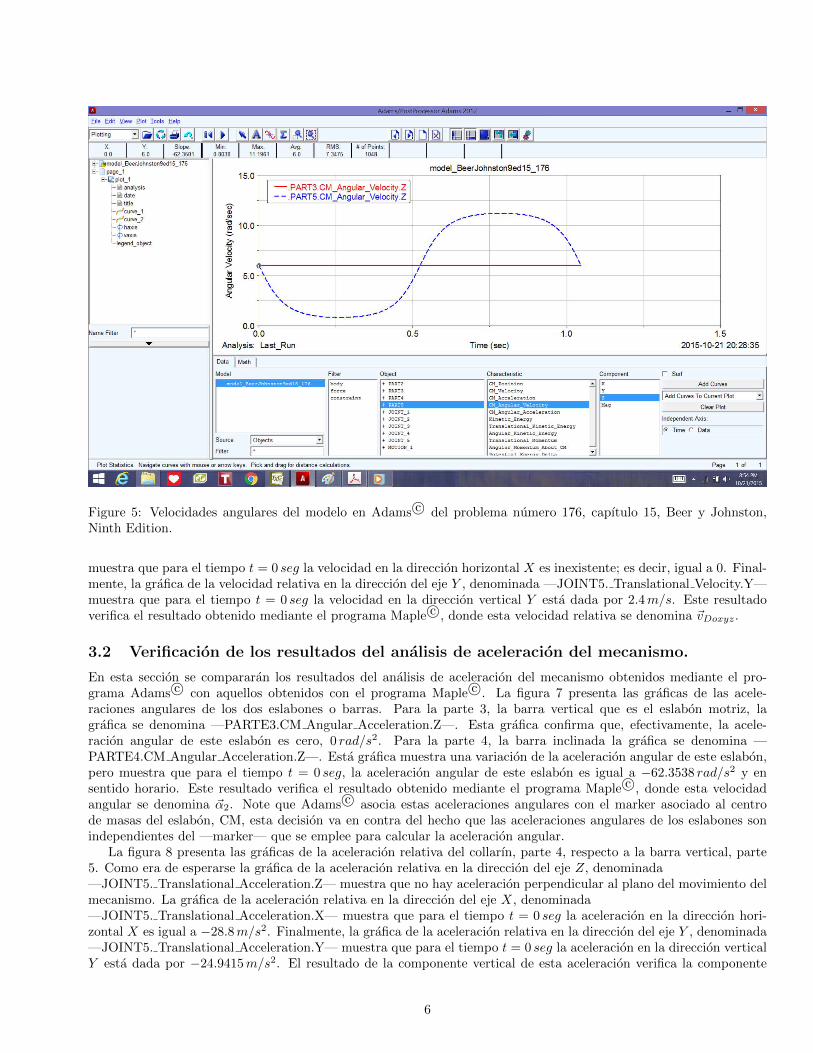
Figure 5: Velocidades angulares del modelo en Adams c© del problema numero 176, capıtulo 15, Beer y Johnston,Ninth Edition.
muestra que para el tiempo t = 0 seg la velocidad en la direccion horizontal X es inexistente; es decir, igual a 0. Final-mente, la grafica de la velocidad relativa en la direccion del eje Y , denominada —JOINT5. Translational Velocity.Y—muestra que para el tiempo t = 0 seg la velocidad en la direccion vertical Y esta dada por 2.4m/s. Este resultadoverifica el resultado obtenido mediante el programa Maple c©, donde esta velocidad relativa se denomina ~vDoxyz.
3.2 Verificacion de los resultados del analisis de aceleracion del mecanismo.
En esta seccion se compararan los resultados del analisis de aceleracion del mecanismo obtenidos mediante el pro-grama Adams c© con aquellos obtenidos con el programa Maple c©. La figura 7 presenta las graficas de las acele-raciones angulares de los dos eslabones o barras. Para la parte 3, la barra vertical que es el eslabon motriz, lagrafica se denomina —PARTE3.CM Angular Acceleration.Z—. Esta grafica confirma que, efectivamente, la acele-racion angular de este eslabon es cero, 0 rad/s2. Para la parte 4, la barra inclinada la grafica se denomina —PARTE4.CM Angular Acceleration.Z—. Esta grafica muestra una variacion de la aceleracion angular de este eslabon,pero muestra que para el tiempo t = 0 seg, la aceleracion angular de este eslabon es igual a −62.3538 rad/s2 y ensentido horario. Este resultado verifica el resultado obtenido mediante el programa Maple c©, donde esta velocidadangular se denomina ~α2. Note que Adams c© asocia estas aceleraciones angulares con el marker asociado al centrode masas del eslabon, CM, esta decision va en contra del hecho que las aceleraciones angulares de los eslabones sonindependientes del —marker— que se emplee para calcular la aceleracion angular.
La figura 8 presenta las graficas de la aceleracion relativa del colların, parte 4, respecto a la barra vertical, parte5. Como era de esperarse la grafica de la aceleracion relativa en la direccion del eje Z, denominada—JOINT5. Translational Acceleration.Z— muestra que no hay aceleracion perpendicular al plano del movimiento delmecanismo. La grafica de la aceleracion relativa en la direccion del eje X, denominada—JOINT5. Translational Acceleration.X— muestra que para el tiempo t = 0 seg la aceleracion en la direccion hori-zontal X es igual a −28.8m/s2. Finalmente, la grafica de la aceleracion relativa en la direccion del eje Y , denominada—JOINT5. Translational Acceleration.Y— muestra que para el tiempo t = 0 seg la aceleracion en la direccion verticalY esta dada por −24.9415m/s2. El resultado de la componente vertical de esta aceleracion verifica la componente
6

Figure 6: Velocidades relativas del colların respecto a la barra vertical del modelo en Adams c© del problema numero176, capıtulo 15, Beer y Johnston, Ninth Edition.
correspondiente del resultado obtenido mediante el programa Maple c©, donde esta aceleracion relativa se denomina~aDoxyz.
Sin embargo, para el tiempo t = 0 seg, donde el colların se desliza respecto a una barra vertical, es imposible quela aceleracion relativa tenga una componente horizontal. ¿Cual es la razon u origen de esta componente horizontal?
La respuesta es muy sencilla, la componente horizontal que aparece es la componente Coriolis de aceleracion, dadapor
ACoriolis = 2 ~ω4 × ~vOxyz = −28.8m/s2 i
Donde ~ω4 es la velocidad angular del eslabon motriz y ~vOxyz es la velocidad del colların respecto a un sistema dereferencia sujeto a rotacion con eje en el punto B y rotando con la velocidad angular del eslabon motriz.
7
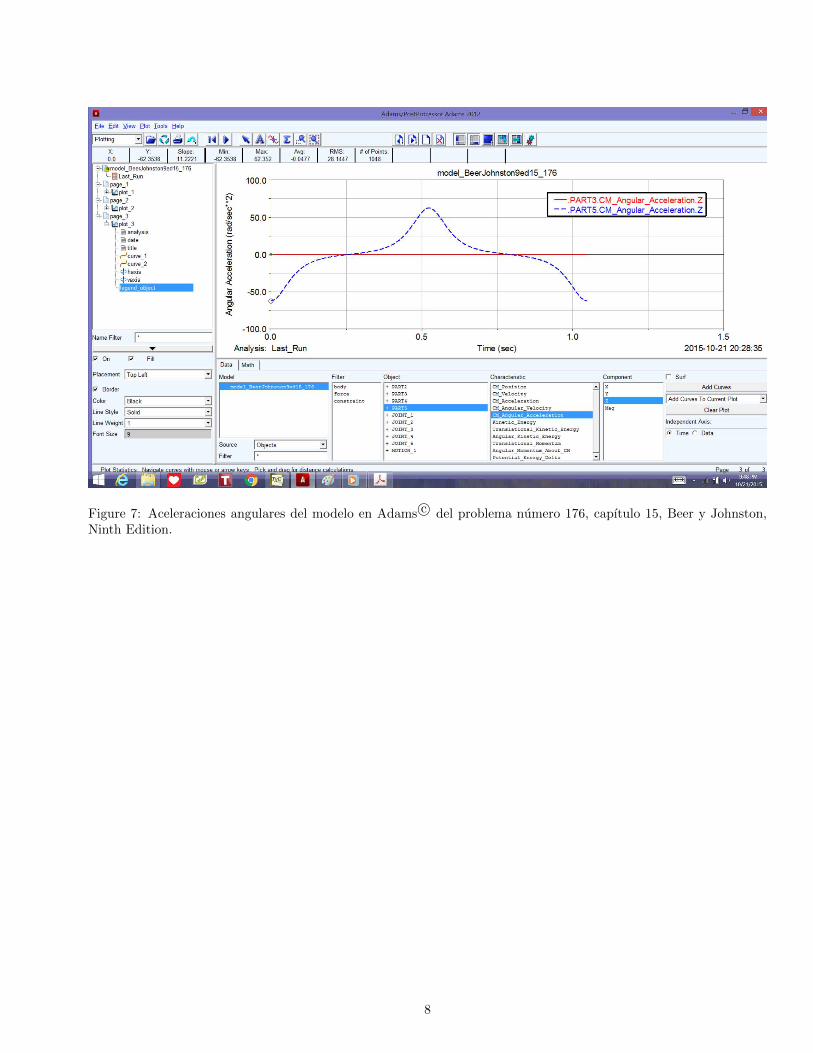
Figure 7: Aceleraciones angulares del modelo en Adams c© del problema numero 176, capıtulo 15, Beer y Johnston,Ninth Edition.
8

Figure 8: Aceleraciones relativas del colların respecto a la barra vertical del modelo en Adams c© del problema numero176, capıtulo 15, Beer y Johnston, Ninth Edition.
En un intento de extraer estos resultados del programa Adams c©, se solicito al programa la obtencion de resultadosque no son estandar para Adams c©. Esta solicitud se lleva a cabo mediante una “Request”, la figura 9, muestra esasolicitud.
Figure 9: Solicitud de informacion adicional al programa Adams c© del problema numero 176, capıtulo 15, Beer yJohnston, Ninth Edition.
Como puede observarse se solicita la aceleracion del sistema de referencia asociado al Marker 10, que forma partedel colların, respecto al sistema de referencia asociado al Marker 9, que forma parte de la barra motriz con respecto ala cual se desplaza el colların.
La figura 10 muestra las direcciones del sistema de referencia asociado al Marker 9, que forma parte de la barramotriz con respecto a la cual se desplaza el colların. Es importante notar que esas direcciones no coinciden con lasdirecciones del sistema de referencia global. Finalmente la figura 11, muestra los resultados de la solicitud.
Excepto por las diferencias en la orientacion de los ejes, los resultados son los mismos. Esta conclusion es un cuantodecepcionante porque esperaba que el programa Adams c© fuera capaz de proporcionar el resultado correcto.
9

Figure 10: Direcciones del sistema de referencia asociado al Marker 9 del modelo del problema numero 176, capıtulo15, Beer y Johnston, Ninth Edition.
Figure 11: Resultados de la Peticion “Request” del modelo del problema numero 176, capıtulo 15, Beer y Johnston,Ninth Edition.
10