2005 Septiembre (2)
4
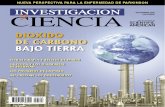
10 -2 10 -1 10 0 10 1 10 2 10 3 10 4 -30 -20 -10 0 10 20 Bode dB 10 -2 10 -1 10 0 10 1 10 2 10 3 10 4 -270 -225 -180 -135 rad/s grados -6 -5 -4 -3 -2 -1 0 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 Diagrama de Nyquist w>0 w<0 Teoría del Control Automático. 3º Ing. Telecom. Curso 04-05. Examen de Septiembre. Segundo parcial Nombre y Apellidos: ______________________________________________________________________ Puntuación: C1:1.5, C2:1.5, C3:2 Tiempo: 1h:15min. C1. Se ha identificado experimentalmente a un sistema, obteniéndose la respuesta frecuencial de la figura. Utilizando el criterio de Nyquist, determine los posibles valores de una ganancia ajustable (K>0) que se añada al dicho sistema, de forma que el sistema resultante en bucle cerrado, utilizando realimentación negativa, sea estable. a) En este caso, dado que nos dicen que el diagrama de Bode se ha obtenido experimentalmente, podríamos asegurar, sin necesidad de intentar reconstruir los ceros y polos que posee el sistema, que se trata de un sistema estable en BA. Por otro lado, dado que aparecen varios cortes con 0dB y con 180º, para analizar la estabilidad en BC y el rango de valores de ganancia que garantizan dicha estabilidad, sería recomendable utilizar el criterio completo de Nyquist (como por otra parte nos sugiere el enunciado). (P=0 puesto que el sistema en BA es estable). Por tanto, deberíamos ver si es posible que el diagrama de Nyquist no rodee al punto crítico (N=0). Reconstruimos el diagrama de Nyquist a partir del Bode. A la vista del mismo, se puede deducir que la única posibilidad para que el sistema resultante en BC sea estable es que el -1 no fuera englobado por ninguno de los bucles. Es decir, teniendo en cuenta que el punto de arranque del diagrama se produce en -5.62 (magnitud equivalente a 15dB y ángulo -180º), habría que ajustar la ganancia adicional a un valor K<1/5.62. Por tanto, la solución es: En cualquier otra situación distinta a la comentada, N sería igual a 1, 2 ó 3, con lo cual el sistema en BC resultaría siempre inestable. 15-09-2005 c s f n d d p d s t M SO t t SO e ω π δ ω ω ω π ω δ π δ δπ 2 ), 60 ( 6 . 1 , 1 , , ) acos( , % 2 1 2 ≈ − ≈ − = = − = = − − G1.P2.1 │ 0 + = + = N P N Z 178 . 0 0 < < K
-
Upload
maria-marmago -
Category
Documents
-
view
214 -
download
0
description
adad
Transcript of 2005 Septiembre (2)

10-2
10-1
100
101
102
103
104
-30
-20
-10
0
10
20Bode
dB
10-2
10-1
100
101
102
103
104
-270
-225
-180
-135
rad/s
grad
os
-6 -5 -4 -3 -2 -1 0
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Diagrama de Nyquist
w>0
w<0
Teoría del Control Automático. 3º Ing. Telecom. Curso 04-05. Examen de Septiembre. Segundo parcial
Nombre y Apellidos: ______________________________________________________________________ Puntuación: C1:1.5, C2:1.5, C3:2 Tiempo: 1h:15min.
C1. Se ha identificado experimentalmente a un sistema, obteniéndose la respuesta frecuencial de la figura.
Utilizando el criterio de Nyquist, determine los posibles valores de una ganancia ajustable (K>0) que se añada al dicho sistema, de forma que el sistema resultante en bucle cerrado, utilizando realimentación negativa, sea estable.
a) En este caso, dado que nos dicen que el diagrama de Bode se ha obtenido experimentalmente, podríamos asegurar, sin necesidad de intentar reconstruir los ceros y polos que posee el sistema, que se trata de un sistema estable en BA. Por otro lado, dado que aparecen varios cortes con 0dB y con 180º, para analizar la estabilidad en BC y el rango de valores de ganancia que garantizan dicha estabilidad, sería recomendable utilizar el criterio completo de Nyquist (como por otra parte nos sugiere el enunciado). (P=0 puesto que el sistema en BA es estable). Por tanto, deberíamos ver si es posible que el diagrama de Nyquist no rodee al punto crítico (N=0). Reconstruimos el diagrama de Nyquist a partir del Bode. A la vista del mismo, se puede deducir que la única posibilidad para que el sistema resultante en BC sea estable es que el -1 no fuera englobado por ninguno de los bucles. Es decir, teniendo en cuenta que el punto de arranque del diagrama se produce en -5.62 (magnitud equivalente a 15dB y ángulo -180º), habría que ajustar la ganancia adicional a un valor K<1/5.62. Por tanto, la solución es: En cualquier otra situación distinta a la comentada, N sería igual a 1, 2 ó 3, con lo cual el sistema en BC resultaría siempre inestable.
15-09-2005
csfnd
dp
ds tMSOttSO e
ωπδωω
ωπ
ωδπδ
δπ
2),60(6.1,1,,)acos(, %
21 2≈−≈−==
−== −
−
G1.P2.1 │
0+=+= NPNZ
178.00 << K

-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
δ = 0.8
022.02.1)( 23 =++−= KzzzzDBC
)1)(4.22.2(4.22.02.1)( 223 ++−=++−= zzzzzzzD BC
C2. Dado el sistema discreto:
a) Diseñar el controlador más sencillo (por este orden: P, PI ó PID) que permita obtener en bucle cerrado error
en régimen permanente nulo ante una secuencia escalón y con un par de polos complejos conjugados cuyo amortiguamiento corresponda con un valor: 8.0≈δ .
Nota: No es necesario determinar numéricamente la ganancia del controlador.
La manera más sencilla es mediante el lugar de las raíces. Necesitaremos un integrador en el controlador, de forma que probaremos en primer lugar con un PI:
Podemos colocar el cero del PI de forma que cancele el polo más lento del sistema (c=0.6). De esta forma, quedará:
Ahora podríamos realizar un boceto del lugar de las raíces, del cual podemos apreciar que efectivamente, puede conseguirse que existan dos polos complejos conjugados con el coeficiente de amortiguamiento deseado.
b) Asegúrese de que el sistema en BC resultante para dicha configuración de polos complejos conjugados es estable. Para comprobar que el tercer polo (que va sobre el eje real negativo) no ha salido de la circunferencia unidad para cuando el par de polos complejos conjugados están en la posición deseada, basta que comprobemos que, conforme incrementamos K, dicho polo real sale de la circunferencia unidad después que los complejos conjugados. Para ello obtenemos la ecuación característica:
Calculamos el valor de K para el que z=-1 satisface dicha ecuación, resultando K=1.2. Para dicho valor de K, podemos factorizar DBC(z), dividiendo por el factor (z+1): Calculando las raíces del polinomio de segundo grado, éstas resultan con módulo 1.55, y por tanto fuera de la circunferencia unidad. Esto quiere decir que los polos c.c. salen de la circunferencia unidad antes que el polo real y por tanto que para cuando los polos c.c. estén en la situación deseada, se puede asegurar que el sistema en BC será estable.
(EL APARTADO B SE ELIMINÓ EN LA VERSIÓN DEFINITIVA DEL ENUNCIADO, SE INCLUYE COMO PARTE DEL EXAMEN RESUELTO POR RESULTAR ILUSTRATIVO)
)2.0)(6.0(2)(
−−=
zzzzG
G1.P2.2 │
)1()()(
−−
=z
czKzC
)1)(2.0(2)(
−−=
zzzKzGBA

10-2 10-1 100 101 102-40
-35-30
-25-20-15
-10-50
510
152025
303540
Mag
nitu
d (d
B)
10-2 10-1 100 101 102-180
-160
-140
-120
-100
-80
-60
-40
-20
0
rad/s
Fase
(gra
dos)
Teoría del Control Automático. 3º Ing. Telecom. Curso 04-05. Examen de Septiembre. Segundo parcial
Nombre y Apellidos: ______________________________________________________________________ C3. Considere el siguiente sistema continuo, identificado en frecuencia (curvas en azul). Determine y diseñe el
controlador (de acuerdo con el siguiente orden de preferencia: P, PD, RA, RR, RM, PI, PID) que permita satisfacer en BC las siguientes especificaciones (frecuencia de corte, margen de fase y error en régimen permanente):
Nota 1: No es necesario dibujar gráficas adicionales. Nota 2: Se penalizará la falta de claridad.
%20,º80,/10 ≤≥= rampafc ErpMsradω
15-09-2005 G1.P2.3 │

rA
dB0
dBAr
τ1
ατ1
En primer lugar, dado que el sistema posee un integrador, en BC el error en régimen permanente ante entrada escalón está garantizado que se anulará, sin necesidad de que el controlador aporte ningún integrador adicional. Nos dan una cota para el error en régimen permanente ante entrada en rampa: Si consideramos la ganancia que tiene el sistema original (que se puede obtener del Bode, localizando el corte de la asíntota de baja frecuencia con la vertical de 1 rad/s), apreciamos que es aproximadamente 4dB, que se corresponde con un valor de 1.6. La Kv engloba la ganancia del sistema y la que aporte el controlador, Kc: Es decir, que la ganancia que debe aportar el controlador, en decibelios, tiene que ser igual o superior a 10dB. Con este dato, ya podemos subir la curva de magnitud en estos 10dB (tomamos el mínimo necesario para satisfacer el régimen permanente) resultando la curva verde continua en la gráfica. Si hacemos esto, vemos que la frecuencia de corte quedaría en 20 rad/s (en el punto donde originalmente la magnitud alcanzaba los -10dB). Con esto la frecuencia de corte quedaría por encima del valor deseado (que es 10 rad/s), mientras que el margen de fase sería de unos 50º, bastante por debajo del mínimo deseado (80º). Por otro lado, si consiguiéramos que la frecuencia de corte estuviera situada en el lugar deseado, el margen de fase sería algo superior a esos 80º y se cumplirían todas las especificaciones. Por tanto, parece claro que la solución está en añadir una red de retardo (RR): Dado que ya tenemos ajustada la ganancia Kc necesaria para satisfacer el régimen permanente, pasamos a calcular los demás parámetros. Puesto que la ganancia Kc ya ha sido incluida, el resto de la red de retardo a baja frecuencia aportará 0dB (de forma que no se modifique lo conseguido con la ganancia), mientras que a frecuencias medias y altas provocará que la curva de magnitud caiga lo suficiente para que en 10 rad/s pase justamente por 0dB. Observamos que en 10 rad/s, la curva de magnitud (con la ganancia ya incorporada) alcanza 7.5dB, por tanto, la red deberá bajar justamente esta misma cantidad: Por otro lado, la segunda frecuencia de esquina la colocaremos lo suficientemente a la izquierda de la frecuencia de corte deseada como para que la pérdida de fase producida por la red no dé lugar a que el margen de fase final sea insuficiente. Podemos tomar: Dado que α es conocido, la otra frecuencia de esquina queda definida: Con esto, tendríamos completamente definida la red de retardo:
En la gráfica, pueden apreciarse en color magenta la red de retardo y en color rojo la curva resultante en BA.
Como comentario adicional, podríamos decir que en este caso particular, podría haberse colocarse la RR ligeramente más a la derecha, puesto que tenemos un pequeño exceso en el margen de fase. Sabemos que mientras más a la derecha coloquemos dicha red, tanto mejor para que el sistema alcance antes el permanente.
52.01≥⇒≤= v
v
KK
erp
dBKKKsGsK dBcccBAsv 1012.356.1)(lim
0≥⇒≥⇒≥==
→
1,1
1)( <
++
= ατατ
ss
KsC c
42.05.7)(log20 10 =⇒−== αα dBAr
sraddesc /31.0101 5.1 =≈ − ω
ατ
srad /13.01=
τ
ss
sC5.71
16.3112.3)(
++
=
G1.P2.4 │