Universidad Simón Bolívar – Conversión de Energía...
30
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller Capítulo 13: Análisis Transitorio de la Máquina de Inducción - 271 - Capítulo 13: Análisis Transitorio de la Máquina de Inducción 13.1 Introducción En los capítulos anteriores se han discutido diversos aspectos de la máquina de inducción. La sencillez constructiva, bajo mantenimiento, larga vida útil, versatilidad y bajo costo, han colocado a esta máquina como pilar del desarrollo industrial moderno. Sin embargo, la regulación de torque y velocidad con estas máquinas no fue frecuente hasta la década de los ochenta, con la evolución de los controladores electrónicos de potencia. El primer método desarrollado para regular la velocidad de la máquina de inducción fue la inclusión de resistencia adicional en el circuito rotórico. El problema con este procedimiento consiste en el excesivo consumo de energía en pérdidas. Posteriormente se utilizó el mismo principio, pero en lugar de quemar la energía en una resistencia externa, se rectificaba la tensión del rotor y con esta potencia se accionaba a una máquina de corriente continua, que a su vez motorizaba a un generador sincrónico y devolvía el exceso de potencia a la red. Este método, conocido como cascada de Kramer, requería de un gran número de máquinas para controlar la velocidad de la máquina de inducción, además los rendimientos de toda la cascada no son muy altos. La regulación de la tensión en el estator permite ajustar la velocidad en un rango limitado, debido a que el torque eléctrico depende del cuadrado de la tensión de alimentación. Las máquinas con alta resistencia en el circuito rotórico amplían el rango posible de control de velocidad con este método. En algunos procesos, donde se necesitan dos o tres velocidades, es posible mediante un cambio en las conexiones de las bobinas, alterar el número de pares de polos de la máquina variando de esta forma la velocidad sincrónica mecánica. Este método se utiliza en la actualidad en los elevadores o ascensores residenciales y en muchas otras aplicaciones. Un sistema de gran difusión industrial es el controlador tensión-frecuencia constante. En este controlador se alimenta la máquina de inducción con una fuente de alimentación con tensión y frecuencia variable para ajustar la velocidad sincrónica. La tensión de alimentación se mantiene proporcional a la frecuencia para que la
-
Upload
vuongnguyet -
Category
Documents
-
view
238 -
download
0
Transcript of Universidad Simón Bolívar – Conversión de Energía...

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 271 -
Capítulo 13: Análisis Transitorio de la Máquina de Inducción 13.1 Introducción En los capítulos anteriores se han discutido diversos aspectos de la máquina de inducción. La sencillez constructiva, bajo mantenimiento, larga vida útil, versatilidad y bajo costo, han colocado a esta máquina como pilar del desarrollo industrial moderno. Sin embargo, la regulación de torque y velocidad con estas máquinas no fue frecuente hasta la década de los ochenta, con la evolución de los controladores electrónicos de potencia. El primer método desarrollado para regular la velocidad de la máquina de inducción fue la inclusión de resistencia adicional en el circuito rotórico. El problema con este procedimiento consiste en el excesivo consumo de energía en pérdidas. Posteriormente se utilizó el mismo principio, pero en lugar de quemar la energía en una resistencia externa, se rectificaba la tensión del rotor y con esta potencia se accionaba a una máquina de corriente continua, que a su vez motorizaba a un generador sincrónico y devolvía el exceso de potencia a la red. Este método, conocido como cascada de Kramer, requería de un gran número de máquinas para controlar la velocidad de la máquina de inducción, además los rendimientos de toda la cascada no son muy altos. La regulación de la tensión en el estator permite ajustar la velocidad en un rango limitado, debido a que el torque eléctrico depende del cuadrado de la tensión de alimentación. Las máquinas con alta resistencia en el circuito rotórico amplían el rango posible de control de velocidad con este método. En algunos procesos, donde se necesitan dos o tres velocidades, es posible mediante un cambio en las conexiones de las bobinas, alterar el número de pares de polos de la máquina variando de esta forma la velocidad sincrónica mecánica. Este método se utiliza en la actualidad en los elevadores o ascensores residenciales y en muchas otras aplicaciones. Un sistema de gran difusión industrial es el controlador tensión-frecuencia constante. En este controlador se alimenta la máquina de inducción con una fuente de alimentación con tensión y frecuencia variable para ajustar la velocidad sincrónica. La tensión de alimentación se mantiene proporcional a la frecuencia para que la
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 272 -
máquina opere siempre con la misma densidad de flujo en el entrehierro. Este método de control de velocidad requiere fuentes que ajusten la amplitud y la frecuencia de la fuente. En un principio esto se realizaba mediante un sistema Ward-Leonhard - Motor de corriente continua controlando la velocidad de un generador sincrónico -. Hoy por hoy los inversores modernos logran este objetivo más eficientemente y con menor costo. Durante muchos años el control tensión-frecuencia constante reguló la velocidad de los motores de inducción. Sin embargo, el desarrollo sostenido de los controladores electrónicos de potencia no ha sido capaz de sustituir completamente a la máquina de corriente continua por la de inducción. Una de las principales razones para este hecho es que la máquina de corriente continua posee tiempos de respuesta menores y características de operación, difíciles de obtener con otras máquinas. Los investigadores centraron su atención en este problema, se plantearon nuevos esquemas de control, fundamentados en el análisis dinámico de la máquina de inducción. Se desarrollaron modelos de la máquina de inducción mediante las técnica de los fasores espaciales y la teoría del campo orientado. Con estas nuevas herramientas se intentó reproducir los controles de la máquina de continua, pero aparecieron limitaciones que aun hoy día no han podido ser superadas completamente. Sin embargo, ya se dispone a nivel comercial de controladores de máquinas de inducción que utilizan ampliamente los fasores espaciales y la teoría del campo orientado. En este capítulo se desarrolla en primer lugar, el modelo de la máquina de inducción en fasores espaciales. Mediante el modelo en fasores espaciales se obtiene el circuito equivalente clásico de la máquina de inducción en régimen permanente. Posteriormente se introducen las transformaciones a campo orientado y se obtienen las ecuaciones transitorias de la máquina de inducción en este sistema de coordenadas. La sencillez de las ecuaciones permite realizar un gran número de controladores de torque y velocidad, algunos de lellos se discuten en este capítulo. Finalmente se analizan los problemas que todavía subsisten hoy día en el control de velocidad de la máquina de inducción, así como las tendencias actuales y futuras.

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 273 -
13.2 Modelo de la máquina de inducción en fasores espaciales Para la modelación transitoria de la máquina de inducción en fasores espaciales se supone que los devanados son trifásicos en el estator y en el rotor, y que cada una de las bobinas produce una distribución sinusoidal de la fuerza magnetomotriz en el entrehierro. También se considera que el estator y el rotor de la máquina son cilíndricos, y que el efecto de las ranuras es despreciable. En la figura -180- se presenta un esquema de la máquina, y de los sistemas de referencia estatóricos y rotóricos.
iae
ae
v a e
ar
iar
var
i b e
vbe
ibr
vbr
i c e
v c e
vcricr
b e
br
c e
c r
�
Máquina de inducción trifásica, y sus ejes del estator y rotor Fig. -180-
Las ecuaciones que rigen el comportamiento de la máquina de inducción en el sistema de coordenadas indicado en la figura -180- son:
v = R i + dtd � = R i + L dt
di + �
��� i 13.1
Te = 21 it � i
13.2 �Te - Tm = J .
��
�
13.3 donde:

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 274 -
v = � � �
v ev r
� � �
=
�
�
�
���va e
vb e
vce���
t
���var
vb r
vcr���
t
�
�
� 13.4
i = � � �
i e
i r
� � �
=
�
�
�
� � � i a e
i b e
i ce
� � �
t
� � � i a r
i br
i cr
� � �
t
�
�
� 13.5
� = � � � �
� e
� r
� � �
=
�
�
�
� � � � a e
� b e� ce
� � �
t
� � � � a r
� b r� cr
� � �
t
�
�
� 13.6
L = ���
Lee Ler
Lre Lrr
��� 13.7
L ee = L e
�
�
�
1 - 2 1 - 2
1
- 2 1 1 - 2
1
- 21 - 2
1 1
�
�
� 13.8
L rr = L r
�
�
�
1 - 2 1 - 2
1
- 2 1 1 - 2
1
- 21 - 2
1 1
�
�
� 13.9
L e r = L r e t = L e r
� �
�
�
c o s � c o s ( � + 3 2 � ) c o s ( � + 3
4 � )
c o s ( � + 3 4 � ) c o s � c o s ( � + 3
2 � )
c o s ( � + 32 � ) c o s ( � + 3
4 � ) c o s �
� �
�
� 13.10
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 275 -
� = � � � �
0 � e r
� re 0
� � �
= �
�
�
0 d � d L e r
d�d L e r
t 0
�
�
� 13.11
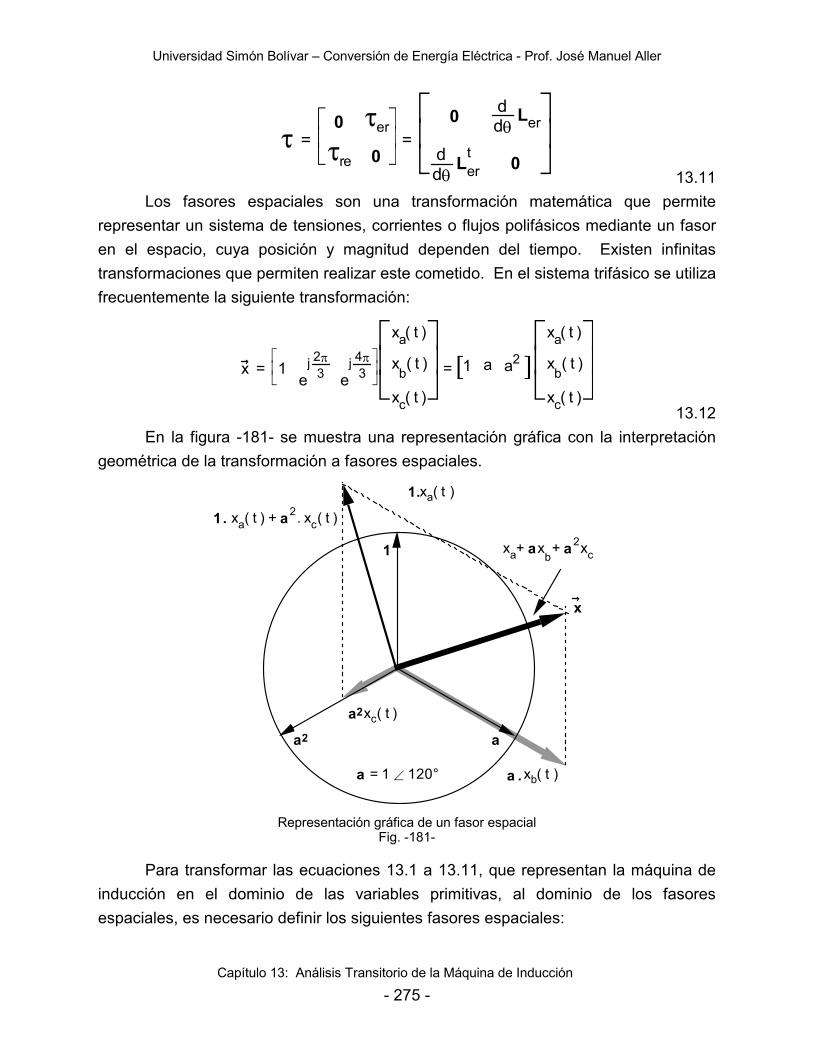
Los fasores espaciales son una transformación matemática que permite representar un sistema de tensiones, corrientes o flujos polifásicos mediante un fasor en el espacio, cuya posición y magnitud dependen del tiempo. Existen infinitas transformaciones que permiten realizar este cometido. En el sistema trifásico se utiliza frecuentemente la siguiente transformación:
x =
� � � � 1
e j
3 2 �
e j
34� �
� �
�
�
�
xa( t )
xb( t )
xc( t )
�
�
�
= � 1 a a 2 �
�
�
�
xa( t )
xb( t )
xc( t )
� �
�
�
13.12 En la figura -181- se muestra una representación gráfica con la interpretación geométrica de la transformación a fasores espaciales.
xc( t )
1
aa 2
xa( t )1.
xb( t )a .
a2
x
1 . x a( t ) + a 2 . x c ( t )
a = 1 � 120°
xa+ axb+ a 2 x c
Representación gráfica de un fasor espacial Fig. -181-
Para transformar las ecuaciones 13.1 a 13.11, que representan la máquina de inducción en el dominio de las variables primitivas, al dominio de los fasores espaciales, es necesario definir los siguientes fasores espaciales:
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 276 -
ve � [ vae
+ a vbe
+ a2 vce ]
13.13
vr � [ var
+ a vbr
+ a2 vcr ]
13.14
i e � [ iae+ a i
be+ a2 ice
] 13.15
i r � [ iar
+ a ibr
+ a2 icr ]
13.16
�e � [ �ae+ a �
be+ a2 �ce
] 13.17
� r � [ �ar
+ a �b r
+ a2 �cr]
13.18 Con las definiciones anteriores se puede transformar la ecuación 13.1 al dominio de los fasores espaciales:
[ 1 a a2 ] ����
vevr
���� = [ 1 a a2 ]
���
ReI 0
0 RrI
���
+ [ 1 a a2 ] dtd ����
�e
�r
����
�
����
ve
vr
����
= ���
Re ie
Rr ir
���
+ dtd ���
�e
�r
���
13.19 Expresando los fasores espaciales de los enlaces de flujo en función de los fasores espaciales de las corrientes, se obtiene el siguiente resultado:
����
�e
�r
���� = [1 a a2 ]
����
�e
�r
����
= [1 a a2 ] ����
Lee Ler
Lre Lrr
����
����
ieir
����
= 23 ���
Le Ler ej �
Ler e- j � Lr
����
����
ie
ir
����
13.20
Sustituyendo la expresión 13.20 en el sistema de ecuaciones 13.19:
� � � �
v e
v r
� � � �
= � � � �
R e i e
R r i r
� � � �
+ 2 3 � � � �
L e L e r e
j �
L e r e
- j � L r
� � � d t
d � � �
i e
i r
� � �
+ j 2 3
� �
� � �
0 L e r e
j �
- L e r e
- j � 0
� � � �
� � � �
i e
i r
� � � �
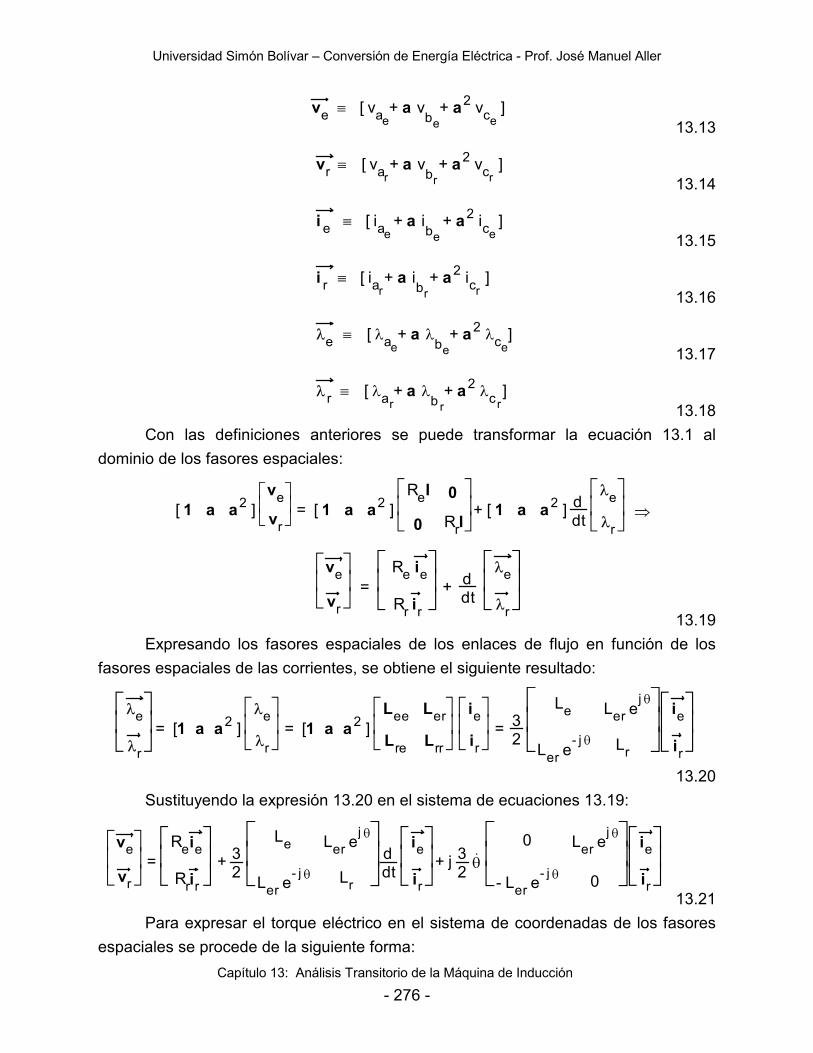
13.21 Para expresar el torque eléctrico en el sistema de coordenadas de los fasores espaciales se procede de la siguiente forma:

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 277 -
Te = 21 ����
ieir
����
t����
0 �er
�ert 0
����
����
ieir
����
= 21 ie
t �er ir + 21 ir
t �er t ie = ie
t �er ir =
= I m � �
�
�
L e r e
- j � i e t � �
�
�
1 a a 2
a 2 1 a
a a 2 1
�
�
�
*
i r
�
�
�
= L e r I m [ ( i e . e
- j � ) * . i r = ]
= Ler 2jie* ir e
j � - ie ir* e- j �
= 21 �
����ie ir
����
*���
0 j ej � Ler
- j e- j � Ler 0
����
����
ie
ir
����
13.22 El torque eléctrico de la máquina de inducción expresado mediante los fasores espaciales es:
Te = 49 Ler Im [ ( ie e- j � )*� ir ] = 4
9 Ler Im [ ( ie � ( ir � ej � )* ] 13.23
13.3 Régimen permanente de la máquina de inducción en fasores espaciales La máquina de inducción en régimen permanente se alimenta en el estator con un sistema trifásico de tensiones de secuencia positiva, y las bobinas del rotor se cortocircuitan:
vae( t ) = 2 Ve cos (�et + �) = 2
2 Ve ( ej (� et+�)
+ e- j (� et+�)
)
vbe
( t ) = 2 Ve cos (�et + � - 32� ) = 2
2 Ve ( ej (� et + � -
32� )
+ e- j (� et +� -
32� )
)
vce
( t ) = 2 Ve cos (�et + � - 3�� ) = 2
2 Ve ( ej (� et + � -
3� � )
+ e- j (� et +� -
34� )
)
var
( t ) = vbr
( t ) = vcr( t ) = 0
13.24
Mediante la definición 13.13 y las condiciones de contorno 13.24 se obtiene el siguiente resultado:
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 278 -
ve = 3
2 � 22 � [ e
j (� et+� ) + e
- j (� et+�)+
+ ej (� et+�)
+ e- j (� et+�-
32� )
+
+ ej (� et+�)
+ e- j (� et+�-
34� )
] = 2 Ve ej (� et+� )
= 2 Ve ej � et
13.25
vr = 0 13.26 Las corrientes del estator y rotor son balanceadas durante la operación en régimen permanente:
i ae( t ) = 2 Ie cos (�et + � ) = 2
2 e ( ej (� et+� )
+ e- j (� et+� )
)I
ibe
( t ) = 2 I e cos (�et + � - 32� ) = 2
2 I e ( ej (� et + � -
32� )
+ e- j (� et +� -
32� )
)
ice
( t ) = 2 I e cos (�et + � - 3�� ) = 2
2 I e ( ej (� et + � -
3� � )
+ e- j (� et +� -
34� )
) 13.27
i ar( t ) = 2 Ir cos (�r t + � ) = 2
2 r ( ej (� r t+� )
+ e- j (� r t+� )
)I
ibr
( t ) = 2 I r cos (�r t + � - 32� ) = 2
2 I r ( ej (� r t + � -
32� )
+ e- j (� r t +� -
32� )
)
icr
( t ) = 2 I r cos (�r t + � - 3�� ) = 2
2 I r ( ej (� r t + � -
3� � )
+ e- j (� r t +� -
34� )
) 13.28
Las corrientes del estator y rotor expresadas mediante los fasores espaciales son:
ie = 3
2 (iae+ a i
be+ a2 ice
) = 2 Ie ej (� et+�)
= 2 Ie ej � et
13.29
ir = 3
2 (iar+ a i
br+ a2 icr
) = 2 Ir ej (� r t+� )
= 2 Ir ej � r t
13.30 La frecuencia de las corrientes del rotor �r , es la diferencia entre la velocidad del campo magnético rotatorio del estator �e , y la velocidad de giro del rotor �m. En otras palabras:

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 279 -
�r = �e - �m ; �m = dtd� =
�
�� 13.31
El fasor espacial de la corriente del rotor se refiere al sistema de coordenadas del estator multiplicándolo por el término ej�, y el fasor espacial de la corriente del estator se puede referir al sistema de coordenadas espaciales del rotor multiplicándolo por el término e- j�:
ir � ej � = 2 Ir ej � rt
� ej � = 2 Ir ej (� e- �m+ �m)t
= 2 Ir ej � et
13.32
ie � e- j � = 2 Ie e j � et
� e- j � = 2 Ie ej (�e- �m)t
= 2 Ie ej � r t
13.33
Sustituyendo las expresiones 13.25, 13.26, 13.29, 13.30, 13.32 y 13.33 en el sistema de ecuaciones 13.21, se obtiene el siguiente resultado:
2 Ve ej � et
= 2 Re Ie ej � et
+ 23 2 Le Ie � j�e e
j� et+ 2
3 2 Ler Ir � j�e ej� et
�
Ve = Re Ie + j �e Le' Ie + j �e Ler
' Ir 13.34
0 = 2 Rr Ir ej � r t+ 2
3 2 Lr Ir � j�r ej� r t
+ 23 2 Ler Ie � j�r e
j� r t �
0 = Rr Ir + j �r Lr' Ir + j �r Ler
' Ie
13.35
Recordando en este punto la definición del deslizamiento:
s � �e
�r = �e
�e - �m 13.36
La ecuación 13.34, junto con la 13.35, dividida por la definición del deslizamiento, permite expresar las ecuaciones de la máquina de inducción, en régimen permanente, y en el dominio de los fasores espaciales mediante el siguiente sistema de ecuaciones:
� � � �
V e
0
� � � � = � � � �
R e+ j � e L e' j � e
L e r'
j � e L er'
sR r + j � e
L r'
� � �
� � �
I e
I r
� � �
13.37 En la figura -182- se muestra el circuito equivalente correspondiente al sistema de ecuaciones anterior. Este circuito coincide con el modelo de la máquina de inducción analizado en el capítulo 9, salvo por las pérdidas en el circuito magnético.

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 280 -
Ve
Re sRr
j�e(Le' - Ler
' ) j�e(Lr' - Ler
' )
j�eL'er
Ie Ir
Ie Ir+Vr = 0
Circuito equivalente de la máquina de inducción en régimen permanente obtenido a partir de la transformación a fasores espaciales
Fig. -184-
El torque eléctrico en régimen permanente se calcula sustituyendo en la expresión 13.23 los fasores espaciales obtenidos en 13.29 y 13.30:
Te = Ler Im [ ie� ( ir� ej � )* ] = Ler Im [ 2 Ie ej(� et+�)
2 Ir e- j(� et+� )
] =
= 2 Ler Ie Ir Im [ ej(� - � ) ] = 3 Ler' Ie Ir sen (� - �)
13.38 De la segunda ecuación del sistema 13.37 se obtiene:
j �e Ler' Ie + ( s
Rr + j �eLr' ) Ir = 0 � Ie = j
�eLer'
sRr + j �eLr
' Ir
13.39 Operando con el resultado anterior se deducen las siguientes expresiones:
Ie = �e Ler
'
( sRr )2+ (�eLr
' )2 Ir
13.40
sen (� - �) =
( sRr )2+ (�eLr
' )2
sRr
13.41 Sustituyendo las ecuaciones 13.40 y 13.41 en la expresión 13.38, se obtiene el torque eléctrico de la máquina de inducción en función de la corriente y la resistencia del rotor:

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 281 -
Te = �e3 � Ir
2� s
Rr 13.42
Esta última expresión se dedujo en el capítulo 9 - ecuación 9.49 -, mediante el análisis del circuito equivalente, e indica que toda la potencia que traspasa el campo magnético rotatorio del estator al rotor produce el torque eléctrico. Hay que recordar que el circuito de la figura -182- no está referido a un número de vueltas determinado. Convirtiendo el circuito al sistema de cálculos en por unidad, queda todo automáticamente referido al mismo número de vueltas. Sin embargo, los resultados obtenidos demuestran que esto no es necesario. 13.4 Transformación a variables de campo orientado Los fasores espaciales simplifican notablemente las ecuaciones dinámicas de la máquina de inducción. En variables primitivas la máquina se representa mediante tres ecuaciones para el circuito del estator, tres para el rotor y la ecuación mecánica del movimiento. Las seis ecuaciones circuitales de las bobinas se reducen a dos ecuaciones en variable compleja, una para el estator y otra para el rotor. La ecuación dinámica lógicamente se mantiene, pero expresada en función de las nuevas variables eléctricas. Además de la reducción en el número de ecuaciones, las nuevas expresiones son más simples porque la dependencia de estas ecuaciones con el ángulo � del rotor es menor. Sin embargo, cada una de las relaciones circuitales se descompone en dos ecuaciones reales, y cada uno de los fasores espaciales se define también por dos variables - módulo y ángulo, ó parte real y parte imaginaria -. Por esta razón, aun cuando existe una simplificación importante en el nuevo sistema de coordenadas, parte de esta simplificación es aparente. Un nivel de simplificación y desacoplamiento mayor se obtiene en el análisis de la máquina de inducción, proyectando los diversos fasores espaciales con respecto a una referencia determinada. Estas proyecciones implican una transformación semejante a la rotación de las variables primitivas a ejes dq analizada en el capítulo 7. La única diferencia es que en la transformación dq se define el ángulo de giro � de la transformación solidario a un eje mecánico de la máquina en el estator o en el rotor. En la máquina de inducción el eje de referencia es un fasor espacial previamente definido. De los infinitos fasores espaciales que pueden ser referencia para la nueva transformación de coordenadas, tres son los más frecuentemente utilizados: El fasor

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 282 -
espacial de la corriente del estator, el fasor espacial de la corriente del rotor y el fasor espacial de la corriente de magnetización. La selección de cualquiera de estos patrones depende del análisis o la aplicación que se está realizando: El fasor espacial de la corriente del estator puede ser medido directamente, el fasor espacial de la corriente de magnetización está asociado directamente con el flujo resultante en el entrehierro y con la producción del torque eléctrico, el fasor espacial de la corriente del rotor tiene incidencia sobre el rendimiento de la máquina y la transferencia de potencia al eje mecánico. En este curso introductorio sólo se desarrollarán las ecuaciones de la máquina de inducción referidas al fasor espacial de la corriente de magnetización. Esta transformación es tal vez la más conocida de todas y fue la primera en ser desarrollada. Para interpretar algunos resultados físicamente es conveniente indicar que aun cuando los fasores espaciales de las corrientes en la máquina son una representación en variable compleja de tres magnitudes trifásicas, es posible asociar esta representación con fuerzas magnetomotrices y campos magnéticos distribuidos sinusoidalmente. Si se multiplica el fasor espacial de la corriente del estator por el número de vueltas de las bobinas del estator, el nuevo fasor espacial representa la fuerza magnetomotriz producida por las respectivas corrientes. De igual forma se pueden asociar o interpretar otros fasores espaciales con variables físicas de la máquina. El campo magnético resultante en el entrehierro de la máquina resulta de la superposición de las fuerzas magnetomotrices del estator y rotor. Para superponer estas fuerzas magnetomotrices es necesario recordar que la posición del rotor es una variable - � -, y que las bobinas del rotor y del estator poseen diferentes números de vueltas. En este sentido se define el fasor espacial de la corriente de magnetización mediante la siguiente expresión:
im = ie +
Ler'
Lr'
ir ej � = im( t ) ej �( t )
13.43 El término L’r/L’er refiere al sistema de referencia del estator todo el campo magnético producido por las corrientes del rotor que atraviesa el entrehierro de la máquina. La multiplicación por el término ej� refiere la posición mecánica del rotor al sistema de referencia del estator.

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 283 -
En la figura -183- se presenta un diagrama de los fasores espaciales correspondientes a las corrientes de la máquina. El fasor espacial de la corriente del estator también se ha representado mediante dos componentes ortogonales, una paralela al fasor espacial de la corriente de magnetización y la otra en cuadratura, denominadas ide e iqe respectivamente. De acuerdo con la figura se tiene:
ie e- j � = ie ej � e- j � = ie ej (�- �) = ie ej � = iecos � + j iesen � = i
de+ j iqe 13.44
Despejando el término dependiente del fasor espacial de la corriente del rotor de la ecuación 13.43, reemplazándolo en la expresión del torque eléctrico 13.23, y haciendo uso de la definición de iqe en 13.44, se obtiene el siguiente resultado:
Te = Ler Im [ ie . ( ir . ej � )* ] = Ler Im [ ie. (
L r
Ler (im - ie ) )* ] =
= Lr
Ler2
Im [ ie. im* - ie. ie
* ] = Lr
Ler2
Im [ ie ej �. im e- j � - ie2 ] =
= Lr
'
Ler'2
im ie sen (� - �) = Lr
'
Ler'2
im ie sen � = Lr
'
Ler'2
im iqe 13.45
La expresión 13.45 determina el torque eléctrico de la máquina de inducción con una constante que depende de los parámetros del modelo, por el producto de dos variables escalares im e iqe. Estas dos variables son proporcionales a la magnitud de
dos flujos ortogonales en el entrehierro. La magnitud del fasor espacial de la corriente de magnetización im, es proporcional a la fuerza magnetomotriz y al flujo de magnetización de la máquina. La magnitud de la componente cuadratura del fasor espacial de la corriente del estator iqe, es proporcional a la componente de la fuerza
magnetomotriz del estator de la máquina, que es perpendicular al flujo de magnetización. En otras palabras, las nuevas variables definen el torque eléctrico instantáneo de la máquina de inducción tal como en una máquina de corriente continua queda determinado mediante el producto de la corriente de campo y armadura. Esta formulación resulta ventajosa para controlar el torque eléctrico producido por la máquina. En la máquina de corriente continua se magnetiza inyectando corriente en la bobina de campo y se obtiene el torque controlando la corriente de la armadura que produce flujo en cuadratura con el flujo de magnetización. En la máquina de inducción se puede utilizar esta misma técnica controlando las variables correspondientes.

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 284 -
Eje del estator
Eje del rotor
a e
ar
� �
�
�
�� � � �
i m
ie
Ler'
Lr ir
� r =�
�
R o t o r � e=
�
�
�
�
� � + �
�
E s t a t o r
E j e d i r e c t o
d
q
E j e c u a dratura
ide
iqe
Fasores espaciales de las corrientes de la máquina de inducción Fig. -183-
A diferencia de la máquina de corriente continua, en la máquina de inducción no existen bobinas ortogonales por donde se pueda inyectar las corrientes im e iqe. Las
fuentes de tensión o corriente aplicadas a las bobinas del estator deben producir las magnitudes adecuadas de las variables transformadas para producir un torque eléctrico determinado. Además, en este caso las nuevas variables no están desacopladas y esto dificulta aun más el problema. El acoplamiento entre las variables im e iqe, y su relación con las corrientes
inyectadas en el estator se puede determinar introduciendo en la segunda ecuación del sistema 13.21, la definición del fasor espacial de la corriente de magnetización definido en la expresión 13.43, considerando que las bobinas del rotor se encuentran en cortocircuito:
vr = 0 = Rr ir + Lr
' dtdir + Ler
' dtd (ie e- j � ) =
= Rr Lr'
Ler'
e- j � (im - ie) + Ler' dt
d [ e- j �(im - ie) ] + Ler' dt
d ( e- j � ie ) =
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 285 -
= Ler'
Lr'
Rr e- j � im + Ler' e- j � dt
dim - j �
�Ler' e- j � im -
Lr'
Rr e- j � ie = 0 + j 0 � Ler'
Rr
Lr' dt
dim + (1 - j �
� Rr
Lr ) im = ie 13.46
La ecuación anterior está referida al sistema de referencia del estator, si se multiplican ambos miembros de esta expresión por el término e-j�, la ecuación 13.45 queda referida al sistema de coordenadas solidario con el fasor espacial de la corriente de magnetización:
Tr e- j � dt
d (im ej � ) + (1-j �� Tr ) e
- j � ime j � = ie ej � e- j � �
Tr dtdim + j
�� Tr im + (1-j
�� Tr ) im = ie ej � e- j �= ie ej � = i
de+ j iqe 13.47
En la expresión anterior Tr es la constante de tiempo del circuito del rotor y se define como el cociente entre la inductancia transformada L’r y la resistencia del rotor Rr. Descomponiendo la ecuación anterior en parte real y parte imaginaria, se obtienen las siguientes expresiones escalares:
Tr dtdim + im = i
de 13.48
Tr im dtd (� - �) = iqe 13.49
La ecuación diferencial de primer orden 13.48 determina la corriente de magnetización a partir de la componente directa del fasor espacial de la corriente del estator referido al sistema de referencia del fasor espacial de la corriente de magnetización. La ecuación diferencial 13.49 determina la velocidad relativa existente entre el fasor espacial de la corriente de magnetización y el sistema de referencia del rotor como función de la magnitud del fasor espacial de la corriente de magnetización y de la componente cuadratura con respecto a este mismo fasor del fasor espacial de la corriente del estator. Esta velocidad es la velocidad de deslizamiento y en régimen permanente es una constante. La variación con respecto al tiempo del ángulo �, define la velocidad del campo magnético en el entrehierro �m. La derivada temporal del ángulo �, representa la velocidad mecánica del rotor �r. El valor de las corrientes transformadas ide e iqe, se obtienen aplicando primero la transformación a fasores espaciales de las corrientes inyectadas en el estator iae, ibe

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 286 -
e ice, recordando que la suma de estas corrientes es cero. Finalmente se refiere este
resultado al eje de referencia del fasor espacial de la corriente de magnetización multiplicando la rotación e- j�. De esta forma se obtienen los siguientes resultados:
ie = [ iae
+ ibe
ej
32�
+ icee
j 3
4�
] = 23 iae
+ j 23 (i
be- ice
) = ie ej� = i�e+ j i
�e 13.50
ie e- j�� = ie ej (�-�)= ide
+ j iqe
= [23 iae
cos� + 23 (i
be- ice
) sen�] + j [- 23 iae
+ 23 (i
be- ice
) cos�] 13.51
Matricialmente las expresiones anteriores se pueden escribir de la siguiente forma:
� �
� �
i � e
i � e
� �
� �
= � �
�
�
2 3 0 0
0 2 3 - 2
3
�
�
�
�
�
�
i a e
i b e
i ce
�
�
�
=
�
�
�
2 3 0
2 3 3
� �
�
�
�
�
i a e
i b e
� �
�
�
13.51
� �
� �
i d e
i q e
� �
� �
= � � � �
c o s � s e n �
- s e n � c o s �
� � �
�
� �
i � e
i � e
�
� �
= � � �
c o s � s e n �
- s e n � c o s �
� � �
�
�
�
2 3 0
2 3 3
�
�
�
� �
� �
i a e
i b e
� �
� �
13.52 La transformación 13.53 depende del ángulo �. Este ángulo define la posición del fasor espacial de la corriente de magnetización con respecto al sistema de referencia del estator. La ecuación diferencial 13.49 determina la variación con respecto al tiempo del ángulo � en función de la magnitud de la corriente de magnetización, la velocidad del rotor y la corriente cuadratura del estator iqe. Para
determinar las componentes directa y cuadratura del fasor espacial de la corriente del estator es necesario calcular previamente la posición instantánea del fasor espacial de la corriente de magnetización. Mediante sensores en el entrehierro de la máquina de inducción, capaces de medir la posición instantánea de la amplitud del campo magnético, es posible controlar el torque eléctrico y la velocidad como en una máquina de corriente continua. En la práctica estos sensores de campo no son prácticos por diferentes razones entre las que destacan las dificultades para modificar máquinas convencionales y el costo involucrado en los sensores y su adaptación a la máquina. Por esta razón se han desarrollado técnicas que permiten estimar la posición

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 287 -
instantánea de la amplitud del campo magnético en el entrehierro, integrando numéricamente en tiempo real las ecuaciones diferenciales que definen el comportamiento eléctrico y mecánico de la máquina de inducción. La primera ecuación del sistema 13.21 determina el fasor espacial de la tensión del estator en función de los fasores espaciales de las corrientes del estator y del rotor. Reemplazando el fasor espacial de la corriente del rotor por la definición 13.43 del fasor espacial de la corriente de magnetización, y refiriendo la expresión resultante al sistema de referencia asociado con este fasor, se obtiene:
ve = Re ie + Le
' dtdie + Ler
' dtd (ej� ir ) = Re ie + Le
' dtdie +
Lr'
Ler'2
dtd (im- ie ) =
= Re ie + (Le' -
Lr'
Ler'2
) dtdie +
Lr'
Ler'2
dtdim
13.54
ve e- j �= Re ie ej (�-�)+ (Le
' - Lr
'
Ler'2
) [ dtdie + j
�� ie ] ej (�-�) +
Lr'
Ler'2
[ dtdim + j
�� im ] = v
de+ j vqe
13.55 Descomponiendo la expresión anterior en parte real y parte imaginaria, se obtiene:
vde
= Re ide
+ (Le' -
Lr'
Ler'2
) dt
dide - (Le
' - Lr
'
Ler'2
) �
� iqe+
Lr'
Ler'2
dtdim
13.56
vqe= Re iqe
+ (Le' -
Lr'
Ler'2
) dt
diqe + (Le' -
Lr'
Ler'2
) �
� ide
+ Lr
'
Ler'2
��
� im 13.57
Las tensiones vde y vqe en el sistema de referencia solidario con el fasor espacial de la corriente de magnetización se determinan a partir de las tensiones aplicadas a cada una de las fases de la máquina igual que para las corrientes mediante la expresión 13.53, y se obtiene:
����
vde
vqe
����
= ����
cos � sen �- sen � cos �
���� ���
v�e
v�e
���
= ����
cos � sen �- sen � cos �
���� ����
0
3
3
2
���
����
vae
vbe
����
32
13.58 Si la máquina se excita en el estator con una fuente de tensión, es necesario determinar las corrientes por integración de las ecuaciones diferenciales 13.48, 13.49,

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 288 -
13.56 y 13.57, para los ejes eléctricos, y la ecuación diferencial dinámica 13.3 del eje mecánico. Se utiliza como expresión para el cálculo del torque eléctrico la relación 13.45. Las condiciones forzantes impuestas por las tensiones que la fuente aplica a las bobinas de estator se determinan a partir de la transformación 13.58. Las variables de estado son, la corriente de magnetización im, las dos componentes de la corriente del estator ide e iqe, la posición del fasor espacial de la corriente de magnetización � y la velocidad del rotor �r. Las variables de control son las tensiones directa vde y cuadratura vqe del estator, referidas al fasor espacial de la corriente de magnetización, y el torque mecánico en el eje de la máquina Tm, función conocida de la velocidad del eje del rotor �r. Escrito en su forma canónica, el sistema de ecuaciones diferenciales que modela el comportamiento dinámico de la máquina de inducción es:
dt
dide = - (Le
' - Lr
'
Ler'2
)-1 (Re+ Rr Lr
'2
Ler'2
) ide
+ �r iqe+ Tr im
iqe
2
+ Rr Lr
'2
Ler'2
im + (Le' -
Lr'
Ler'2
)-1 vde
13.59
dt
diqe = - �r ide- Tr im
ide
iqe - (Le' -
Lr'
Ler'2
)-1(Re+Rr Lr
'2
Ler'2
) - (Le' -
Lr'
Ler'2
)-1Lr
'
Ler'2
�r im+ (Le' -
Lr'
Ler'2
)-1vqeiqe
13.60
dt
dim = Tr
ide
- im
13.61
dtd� = �r + Tr im
iqe
13.62
dt
d�r = J1 [ 2
3 Lr
'
Ler'2
im iqe - Tmec(�r) ]
13.63 Si las variables de control son las corrientes del estator, el sistema anterior se simplifica notablemente y las ecuaciones 13.61, 13.62 y 13.63 representan la dinámica de la máquina de inducción. Esta simplificación es muy conveniente cuando se diseñan sistemas de control de velocidad y torque en tiempo real.
Durante cada paso en la integración numérica de las ecuaciones 13.59 a 13.63 es necesario calcular los valores instantáneos de vde y vqe, si se controla con fuentes de tensión las bobinas del estator, o ide e iqe si se controla la corriente de estos

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 289 -
devanados. Las transformaciones de coordenadas 13.53 y 13.58 permiten realizar este cálculo en cada paso de integración.
En la figura -184- se presenta el gráfico del arranque de una máquina de inducción convencional en vacío, a la cual se le ha aplicado un sistema trifásico equilibrado de tensiones en el estator, con la frecuencia angular constante. En este análisis se ha utilizado el sistema de ecuaciones formado por las expresiones 13.59 a 13.63, la transformaciones 13.53 y 13.58, y las condiciones iniciales correspondientes a una máquina detenida y desenergizada. Se ha supuesto un valor positivo muy pequeño para la corriente de magnetización im, para permitir la integración numérica en el primer instante de tiempo. En el gráfico se compara el torque eléctrico y la velocidad angular del rotor, utilizando las ecuaciones de campo orientado y el circuito equivalente de la máquina de inducción.
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Torque eléctrico según ecuaciones transitorias
Torque eléctrico según ecuaciones de régimen
permanente
Te/Tb
�r/�b
Velocidad angular según ecuaciones transitorias
Velocidad angular según ecuaciones de reg. perm. �e
tiempo (s)
Comparación entre el modelo transitorio y permanente de la máquina de inducción Fig. -184-
El torque eléctrico calculado a partir de la integración de las ecuaciones diferenciales que modelan el comportamiento de la máquina en campo orientado, presenta fuertes oscilaciones durante el arranque, debido a que la fuente debe incrementar el flujo en el entrehierro para producir torque eléctrico. Estas oscilaciones son semejantes al fenómeno de energización de un transformador. La velocidad también es afectada por las fuertes perturbaciones del torque eléctrico, pero en menor

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 290 -
medida debido al retardo que introduce la inercia. Los resultados del análisis transitorio se encuentran retrasados con respecto a la respuesta dinámica del circuito equivalente, debido a que el modelo clásico considera que el flujo está presente todo el tiempo en el entrehierro. Los sistemas de control de la máquina de inducción por campo orientado intentan generar el flujo de magnetización lo más rápidamente posible, para que el torque eléctrico sea grande y permita incrementar la velocidad de respuesta del sistema. 13.5 Control tensión-frecuencia de la máquina de inducción El primer controlador de velocidad de las máquinas de inducción y tal vez uno de los más utilizados en la práctica, consiste en regular la frecuencia de la fuente de alimentación. Variando la frecuencia de las tensiones aplicadas a las bobinas del estator, cambia la velocidad de sincronismo de la máquina. La variación de la frecuencia afecta proporcionalmente las reactancias de magnetización y dispersión en el circuito equivalente, pero las resistencias se mantienen aproximadamente constantes, considerando que el efecto pelicular no es muy pronunciado. Para que la densidad de flujo magnético se mantenga prácticamente constante, y dentro de los límites de diseño de la máquina, es conveniente variar la amplitud de la tensión de alimentación en la misma proporción que se varía la frecuencia. De esta forma, la magnitud del torque eléctrico es similar a la que se obtiene a frecuencia nominal, pero la velocidad es variable.
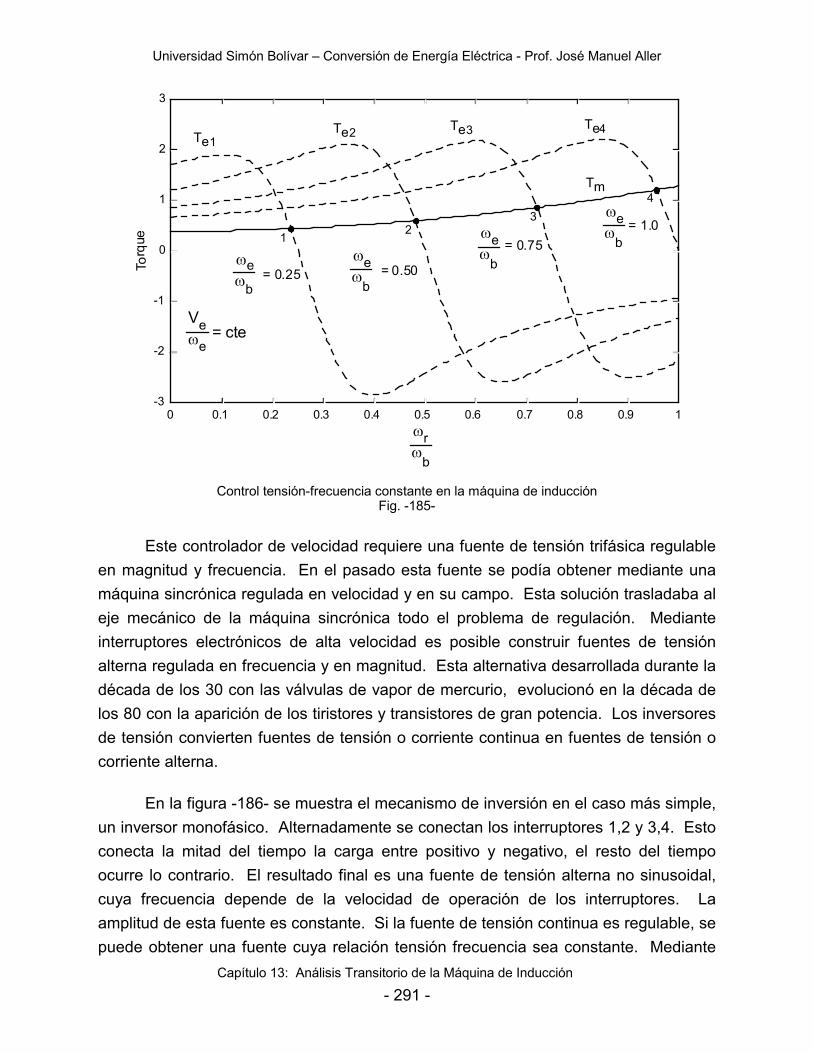
En la figura -185- se presentan las características torque eléctrico velocidad para una máquina de inducción alimentada mediante cuatro frecuencias diferentes, manteniendo constante la relación entre la amplitud de la tensión de alimentación y la frecuencia. Incrementando paulatinamente la frecuencia es posible acelerar una carga mecánica pasando por los puntos 1, 2, 3, hasta alcanzar el punto 4. Si la variación de la frecuencia es lenta en comparación con la inercia del conjunto máquina-carga mecánica, la corriente se reduce con respecto a un arranque directo. También es posible mantener cualquier punto de operación intermedio, aumentando o reduciendo la velocidad. Operando a baja frecuencia, se incrementa el torque de arranque, pero el torque máximo de la máquina es prácticamente constante, siempre y cuando las reactancias sean mucho mayores que las resistencias del modelo.
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 291 -
-3
-2
-1
0
1
2
3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
�b
�r
�b
�e
�b
�e= 0.25 �
b
�e = 0.50�
b
�e = 0.75= 1.0
Tm
�e
Ve = cte
1 23
4
Te1To
rque
Te2 Te3 Te4
Control tensión-frecuencia constante en la máquina de inducción Fig. -185-
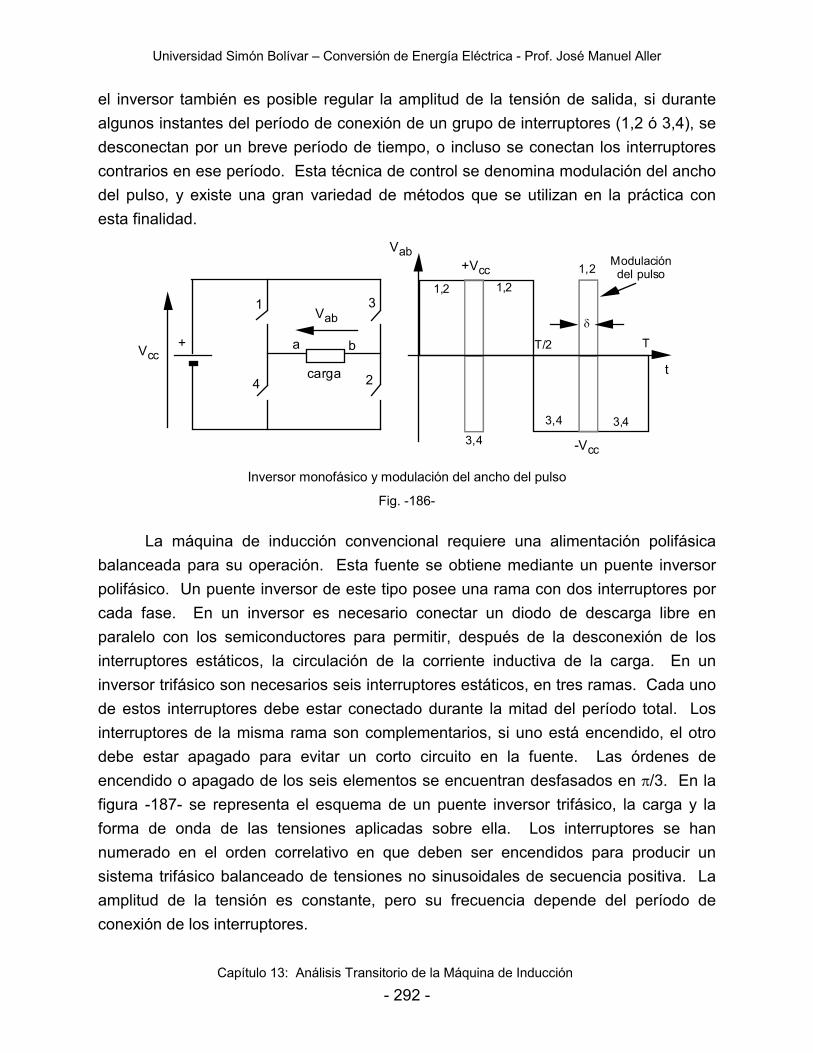
Este controlador de velocidad requiere una fuente de tensión trifásica regulable en magnitud y frecuencia. En el pasado esta fuente se podía obtener mediante una máquina sincrónica regulada en velocidad y en su campo. Esta solución trasladaba al eje mecánico de la máquina sincrónica todo el problema de regulación. Mediante interruptores electrónicos de alta velocidad es posible construir fuentes de tensión alterna regulada en frecuencia y en magnitud. Esta alternativa desarrollada durante la década de los 30 con las válvulas de vapor de mercurio, evolucionó en la década de los 80 con la aparición de los tiristores y transistores de gran potencia. Los inversores de tensión convierten fuentes de tensión o corriente continua en fuentes de tensión o corriente alterna. En la figura -186- se muestra el mecanismo de inversión en el caso más simple, un inversor monofásico. Alternadamente se conectan los interruptores 1,2 y 3,4. Esto conecta la mitad del tiempo la carga entre positivo y negativo, el resto del tiempo ocurre lo contrario. El resultado final es una fuente de tensión alterna no sinusoidal, cuya frecuencia depende de la velocidad de operación de los interruptores. La amplitud de esta fuente es constante. Si la fuente de tensión continua es regulable, se puede obtener una fuente cuya relación tensión frecuencia sea constante. Mediante
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 292 -
el inversor también es posible regular la amplitud de la tensión de salida, si durante algunos instantes del período de conexión de un grupo de interruptores (1,2 ó 3,4), se desconectan por un breve período de tiempo, o incluso se conectan los interruptores contrarios en ese período. Esta técnica de control se denomina modulación del ancho del pulso, y existe una gran variedad de métodos que se utilizan en la práctica con esta finalidad.
a b
1
2
3
4carga
+Vcc
Vab
T/2 T
t
Vab+Vcc
-Vcc
Modulación del pulso
1,2
3,4 3,43,4
1,21,2
�
Inversor monofásico y modulación del ancho del pulso
Fig. -186- La máquina de inducción convencional requiere una alimentación polifásica balanceada para su operación. Esta fuente se obtiene mediante un puente inversor polifásico. Un puente inversor de este tipo posee una rama con dos interruptores por cada fase. En un inversor es necesario conectar un diodo de descarga libre en paralelo con los semiconductores para permitir, después de la desconexión de los interruptores estáticos, la circulación de la corriente inductiva de la carga. En un inversor trifásico son necesarios seis interruptores estáticos, en tres ramas. Cada uno de estos interruptores debe estar conectado durante la mitad del período total. Los interruptores de la misma rama son complementarios, si uno está encendido, el otro debe estar apagado para evitar un corto circuito en la fuente. Las órdenes de encendido o apagado de los seis elementos se encuentran desfasados en �/3. En la figura -187- se representa el esquema de un puente inversor trifásico, la carga y la forma de onda de las tensiones aplicadas sobre ella. Los interruptores se han numerado en el orden correlativo en que deben ser encendidos para producir un sistema trifásico balanceado de tensiones no sinusoidales de secuencia positiva. La amplitud de la tensión es constante, pero su frecuencia depende del período de conexión de los interruptores.

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 293 -
a
b
c
1 3 5
4 6 2
+ V n
V a b
5 , 6 , 1 6 , 1 , 2 1,2,3 2,3,4 3,4,5 4 , 5 , 6
V b c
V c a
t
t
tT / 6 T / 3 T/2 T
+ V
-V
+V
+V- V
- V
C a r g a
Puente inversor trifásico y formas de onda de la tensión a la salida
Fig. -187- Descomponiendo las formas de onda de la figura -187- en series de Fourier, se puede analizar el comportamiento de la máquina de inducción sometida a este tipo de excitación. Si la fuente primitiva es de corriente alterna, la tensión de entrada al inversor puede ser variada mediante un puente rectificador controlado. La fuente de corriente continua obtenida mediante bancos de baterías o por rectificación no controlada de sistemas de tensión alterna, se pueden regular mediante troceadores de
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 294 -
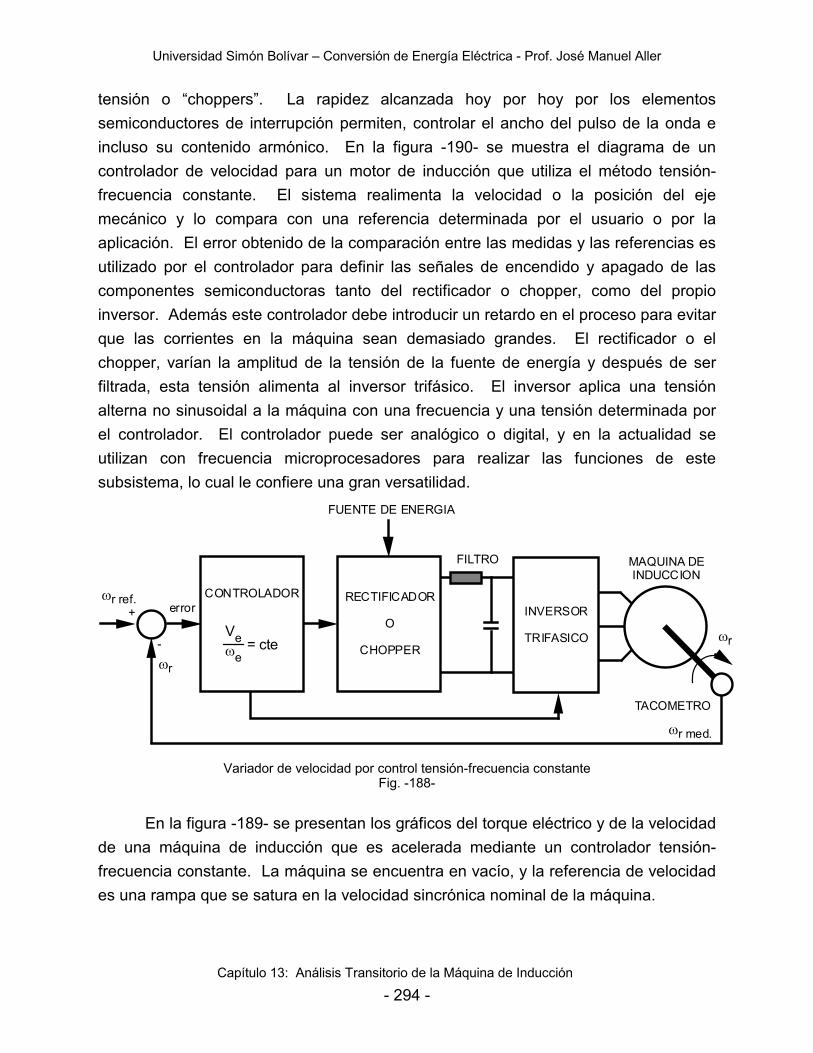
tensión o “choppers”. La rapidez alcanzada hoy por hoy por los elementos semiconductores de interrupción permiten, controlar el ancho del pulso de la onda e incluso su contenido armónico. En la figura -190- se muestra el diagrama de un controlador de velocidad para un motor de inducción que utiliza el método tensión-frecuencia constante. El sistema realimenta la velocidad o la posición del eje mecánico y lo compara con una referencia determinada por el usuario o por la aplicación. El error obtenido de la comparación entre las medidas y las referencias es utilizado por el controlador para definir las señales de encendido y apagado de las componentes semiconductoras tanto del rectificador o chopper, como del propio inversor. Además este controlador debe introducir un retardo en el proceso para evitar que las corrientes en la máquina sean demasiado grandes. El rectificador o el chopper, varían la amplitud de la tensión de la fuente de energía y después de ser filtrada, esta tensión alimenta al inversor trifásico. El inversor aplica una tensión alterna no sinusoidal a la máquina con una frecuencia y una tensión determinada por el controlador. El controlador puede ser analógico o digital, y en la actualidad se utilizan con frecuencia microprocesadores para realizar las funciones de este subsistema, lo cual le confiere una gran versatilidad.
INVERSOR TRIFASICO
FILTRO
RECTIFICADOR
O
CHOPPER
FUENTE DE ENERGIA
CONTROLADOR
�e
Ve = cte
error
-�r
�r ref.+
�r
TACOMETRO
MAQUINA DE INDUCCION
�r med.
Variador de velocidad por control tensión-frecuencia constante
Fig. -188-
En la figura -189- se presentan los gráficos del torque eléctrico y de la velocidad de una máquina de inducción que es acelerada mediante un controlador tensión-frecuencia constante. La máquina se encuentra en vacío, y la referencia de velocidad es una rampa que se satura en la velocidad sincrónica nominal de la máquina.

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 295 -
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
�r
� r ref.Te
tiempo (s)
�e
Ve = cte
Análisis por campo orientado de un controlador tensión-frecuencia constante Fig. -189-
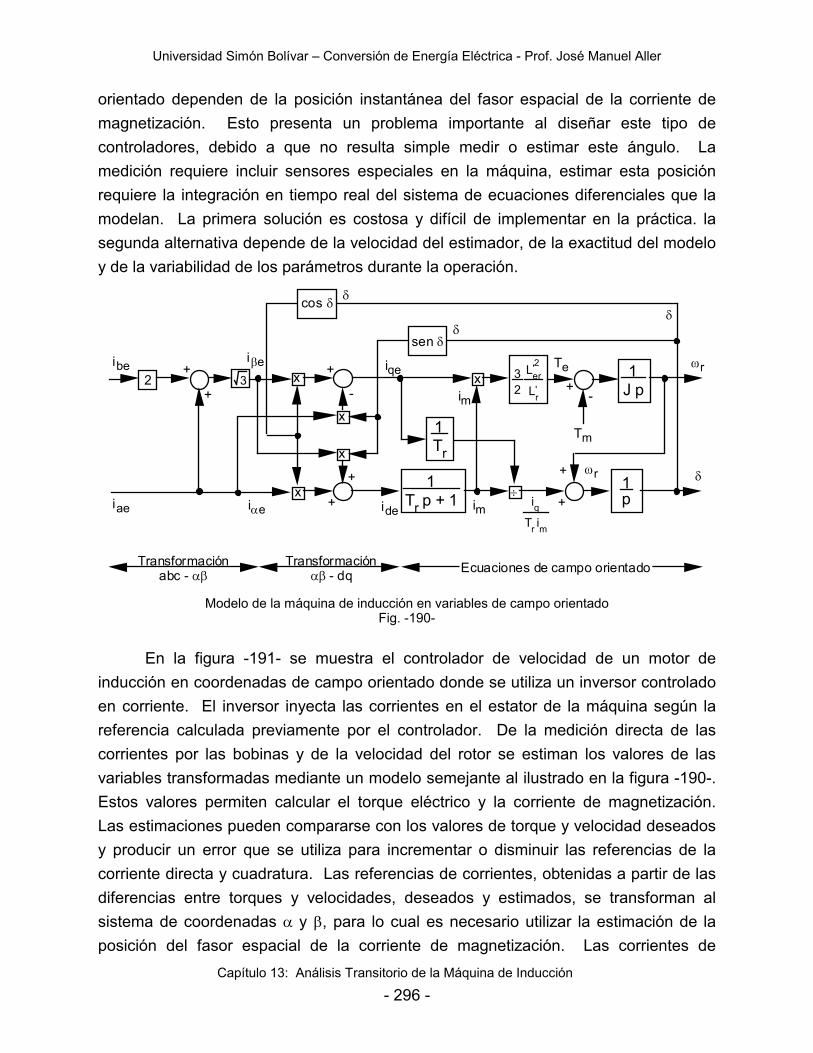
13.6 Controladores de torque y velocidad por campo orientado En la figura -190- se presenta el diagrama de bloques que corresponde al modelo de la máquina de inducción en variables de campo orientado y la transformación desde las coordenadas primitivas a estas nuevas coordenadas. En este modelo, el torque eléctrico depende del producto de la corriente de magnetización y de la corriente cuadratura del estator. Los sistemas de control por campo orientado se fundamentan en la posibilidad de ajustar el valor de estas dos variables. Tal como sucede en las máquinas de corriente continua, el campo tiene una constante de tiempo relativamente lenta y es conveniente para incrementar la velocidad de respuesta del sistema, mantener la corriente de magnetización en el máximo valor posible. De esta forma el torque se controla mediante la corriente cuadratura. La corriente de magnetización se controla mediante el ajuste de la corriente directa. En régimen permanente estas dos corrientes tienen el mismo valor, hecho que se deduce inmediatamente de la ecuación diferencial 13.61. El principal problema de los controladores por campo orientado consiste en determinar el valor de las corrientes o tensiones de alimentación en variables primitivas, que producen los valores deseados de las variables de campo orientado. La transformación directa e inversa entre variables primitivas y variables de campo
Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 296 -
orientado dependen de la posición instantánea del fasor espacial de la corriente de magnetización. Esto presenta un problema importante al diseñar este tipo de controladores, debido a que no resulta simple medir o estimar este ángulo. La medición requiere incluir sensores especiales en la máquina, estimar esta posición requiere la integración en tiempo real del sistema de ecuaciones diferenciales que la modelan. La primera solución es costosa y difícil de implementar en la práctica. la segunda alternativa depende de la velocidad del estimador, de la exactitud del modelo y de la variabilidad de los parámetros durante la operación.
2 3+
+x
x
x
x
ibe
iae
i�e
i�e
+
-
+
+
iqe
ideTr p + 1
1im
xim
23
Lr'
Ler'2 Te
+
Tm
- J p1 �r
�
Tr
1
�r+
+ p1 �
��
sen �
cos � �
Tr im
iq
Transformación abc - ��
Transformación �� - dq Ecuaciones de campo orientado
Modelo de la máquina de inducción en variables de campo orientado Fig. -190-
En la figura -191- se muestra el controlador de velocidad de un motor de inducción en coordenadas de campo orientado donde se utiliza un inversor controlado en corriente. El inversor inyecta las corrientes en el estator de la máquina según la referencia calculada previamente por el controlador. De la medición directa de las corrientes por las bobinas y de la velocidad del rotor se estiman los valores de las variables transformadas mediante un modelo semejante al ilustrado en la figura -190-. Estos valores permiten calcular el torque eléctrico y la corriente de magnetización. Las estimaciones pueden compararse con los valores de torque y velocidad deseados y producir un error que se utiliza para incrementar o disminuir las referencias de la corriente directa y cuadratura. Las referencias de corrientes, obtenidas a partir de las diferencias entre torques y velocidades, deseados y estimados, se transforman al sistema de coordenadas � y �, para lo cual es necesario utilizar la estimación de la posición del fasor espacial de la corriente de magnetización. Las corrientes de

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 297 -
referencia en coordenadas � y � se transforman nuevamente a variables primitivas a, b y c. Las corrientes de referencia se aplican como entrada al inversor controlado en corriente. El inversor sigue muy de cerca a las referencias de corriente en coordenadas primitivas e inyecta a las bobinas de la máquina estas corrientes. La referencia de la corriente de campo es conveniente mantenerla en el mayor valor posible para incrementar la velocidad de respuesta del sistema. Cuando la máquina excede la velocidad sincrónica, es recomendable debilitar el campo para no exceder el límite de la potencia nominal.
k1+ p
k2 k
3+ p
k4
controlador de
velocidad
controlador de
torque
k5+ p
k6
controlador de
flujo
Transformación a coordenadas
� - �
ej �
Transformación a coordenadas
a - b - c
2 / 3
Inversor con
control en
corriente
Motor
Tacó-metro
Estimador de
variables
Fig. -190-�ref
+
�r-
+-
Te
Teim
cos �
sen �
im
+im ref.
- id ref.
iq ref.Te ref.
�ri� ref
i� ref
ia ref
ib ref
ic ref
ia
ib
ic
ia
ib
� r
Controlador de velocidad en coordenadas de campo orientado Fig. -191-
El inversor controlado por corriente es un convertidor electrónico que mide las corrientes por cada fase del puente y las compara con las referencias. Cuando la diferencia entre el valor medido de la corriente en una fase y su referencia exceden un cierto valor de histéresis, se conecta uno de los interruptores de la rama del puente que corrije el error. Si la corriente es menor que la referencia se conecta la fase correspondiente, a la barra positiva del puente mediante el interruptor estático. Si la corriente es mayor que la referencia se conecta la fase a la barra negativa. Para las diferencias comprendidas dentro del rango de la histéresis no se alteran las condiciones previas de conectividad de los interruptores. En este control del inversor

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 298 -
es necesaria un cierto retardo en la variación de las corrientes para evitar que la frecuencia de operación de los interruptores estáticos sea muy elevada. El retardo depende de la relación entre las inductancias y resistencias de la máquina. Aumentar la histéresis del control, disminuye la frecuencia de interrupción, pero reduce la precisión en el seguimiento de la referencia.
El controlador de velocidad de la figura -191- también puede ser realizado mediante puentes controlados por tensión, pero en este caso es necesario añadir al modelo de estimación de variables, la ecuación de tensión del estator y calcular las referencias de tensión que producen las condiciones de torque y velocidad deseadas.
El principal problema del estimador de variables internas de la máquina es la variabilidad de los parámetros con la temperatura, la frecuencia y la saturación. En particular el modelo del estimador ilustrado en la figura -190- es muy sensible al valor de la constante de tiempo del rotor Tr, debido a que influye directamente en la magnitud y dirección instantánea de la corriente de magnetización. Los errores en la estimación del verdadero ángulo � producen errores en la transformación de coordenadas primitivas a coordenadas de campo orientado, y esta transformación es la que permite desacoplar el torque eléctrico en dos componentes independientes. Los variadores de velocidad modernos incluyen esquemas de control adaptivo que determinan y corrigen en línea el valor de la constante de tiempo del rotor utilizado por el estimador de variables.
Un método muy simple para corregir en línea el valor de la constante de tiempo Tr , consiste en ajustar las consignas del controlador para obtener la magnitud mínima de la corriente del estator ie, para una condición cualquiera de régimen permanente. El torque eléctrico es siempre proporcional al producto de las magnitudes de la corriente en cuadratura iqe y de la corriente de magnetización im, pero en régimen permanente, la corriente de magnetización im es igual a la corriente directa ide, por lo tanto el producto de la corriente directa y cuadratura es constante. La magnitud de la corriente del estator es igual al valor de la hipotenusa formada por las corrientes directa ide y cuadratura iqe. Como la magnitud de la corriente del estator se ha reducido al mínimo mediante el controlador, las componentes directa y cuadratura son iguales en el punto de equilibrio obtenido. De esta forma y mediante la ecuación 13.61 aplicada en estas condiciones de operación, se puede calcular de la medida directa de la velocidad del rotor y de la frecuencia del estator, la constante de tiempo del rotor:

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 299 -
dtd� = �r + Tr im
iqe = �r + Tr ide
iqe = �r + Tr
1 = �e � Tr = �e- �r
1 = s�e
1
13.64 El ángulo � en estas condiciones es exactamente igual al ángulo �+�/4. La transformación de coordenadas se puede realizar con precisión debido a que se conoce la posición del fasor espacial de la corriente de magnetización y el valor corregido de la constante de tiempo del rotor. Si cambia la temperatura de la máquina, esta constante de tiempo se alterará, pero el control adaptivo calcula nuevamente la posición del campo y la constante de tiempo, en cuanto la máquina alcance el nuevo régimen permanente de operación. En la figura -192- se presenta el diagrama de los fasores espaciales de la máquina de inducción cuando esta opera en un punto de corriente mínima en el estator.
�
��/4
iqe
ide
= im im
ieie = i
de
2 + iqe
2
Eje del estator
iemin= 2 iqe
=Ler
'2
3Lr
' � Tm(�r)
Tr = s �e1
dtd�
= dtd� = �e
Condición de corriente mínima en el estator y determinación en línea de Tr
Fig. -192-

Universidad Simón Bolívar – Conversión de Energía Eléctrica - Prof. José Manuel Aller
Capítulo 13: Análisis Transitorio de la Máquina de Inducción
- 300 -