Unidad Nº 04 - Reticulados-2003
14
Universidad Tecnológica Nacional – Unidad Académica Concordia Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003 Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 1 de 14 CÁTEDRA: ESTABILIDAD. CARRERA: INGENIERÍA ELÉCTRICA - 2º AÑO. UNIDAD TEMÁTICA Nº4: “SISTEMAS DE ALMA CALADA O RETICULADOS”. • RETICULADOS O ENTRAMADOS SIMPLES. BARRAS Y NUDOS. CONDICIÓN DE RIGIDEZ. DISTINTOS TIPOS DE ARMADURAS. • DETERMINACIÓN DE LOS ESFUERZOS EN LAS BARRAS. RESOLUCIÓN ANALÍTICA POR EL MÉTODO DE LOS NUDOS. MÉTODO DE CREMONA, CULMANN Y RITTER. 2001 – Transcripción a cargo del alumno de Ingeniería Civil: Leandro Pasqualin.
-
Upload
facundo-gras -
Category
Documents
-
view
56 -
download
7
Transcript of Unidad Nº 04 - Reticulados-2003
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 1 de 14
CÁTEDRA: ESTABILIDAD. CARRERA : INGENIERÍA ELÉCTRICA - 2º AÑO. UNIDAD TEMÁTICA Nº4 : “SISTEMAS DE ALMA CALADA O RETICULADOS”.
• RETICULADOS O ENTRAMADOS SIMPLES. BARRAS Y NUDOS. CONDICIÓN DE
RIGIDEZ. DISTINTOS TIPOS DE ARMADURAS.
• DETERMINACIÓN DE LOS ESFUERZOS EN LAS BARRAS. RESOLUCIÓN ANALÍTICA
POR EL MÉTODO DE LOS NUDOS. MÉTODO DE CREMONA, CULMANN Y RITTER.
2001 – Transcripción a cargo del alumno de Ingeniería Civil: Leandro Pasqualin.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 2 de 14
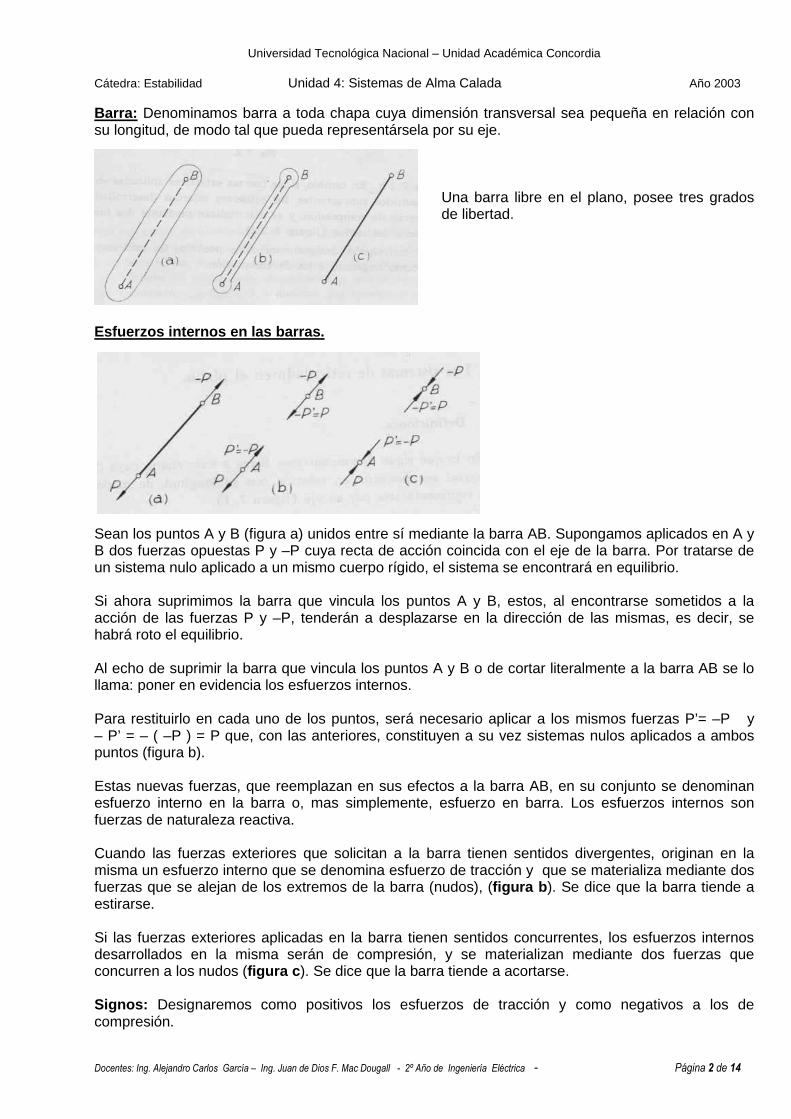
Barra: Denominamos barra a toda chapa cuya dimensión transversal sea pequeña en relación con su longitud, de modo tal que pueda representársela por su eje.
Una barra libre en el plano, posee tres grados de libertad.
Esfuerzos internos en las barras. Sean los puntos A y B (figura a) unidos entre sí mediante la barra AB. Supongamos aplicados en A y B dos fuerzas opuestas P y –P cuya recta de acción coincida con el eje de la barra. Por tratarse de un sistema nulo aplicado a un mismo cuerpo rígido, el sistema se encontrará en equilibrio. Si ahora suprimimos la barra que vincula los puntos A y B, estos, al encontrarse sometidos a la acción de las fuerzas P y –P, tenderán a desplazarse en la dirección de las mismas, es decir, se habrá roto el equilibrio. Al echo de suprimir la barra que vincula los puntos A y B o de cortar literalmente a la barra AB se lo llama: poner en evidencia los esfuerzos internos. Para restituirlo en cada uno de los puntos, será necesario aplicar a los mismos fuerzas P’= –P y – P’ = – ( –P ) = P que, con las anteriores, constituyen a su vez sistemas nulos aplicados a ambos puntos (figura b). Estas nuevas fuerzas, que reemplazan en sus efectos a la barra AB, en su conjunto se denominan esfuerzo interno en la barra o, mas simplemente, esfuerzo en barra. Los esfuerzos internos son fuerzas de naturaleza reactiva. Cuando las fuerzas exteriores que solicitan a la barra tienen sentidos divergentes, originan en la misma un esfuerzo interno que se denomina esfuerzo de tracción y que se materializa mediante dos fuerzas que se alejan de los extremos de la barra (nudos), (figura b). Se dice que la barra tiende a estirarse. Si las fuerzas exteriores aplicadas en la barra tienen sentidos concurrentes, los esfuerzos internos desarrollados en la misma serán de compresión, y se materializan mediante dos fuerzas que concurren a los nudos (figura c). Se dice que la barra tiende a acortarse. Signos: Designaremos como positivos los esfuerzos de tracción y como negativos a los de compresión.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 3 de 14
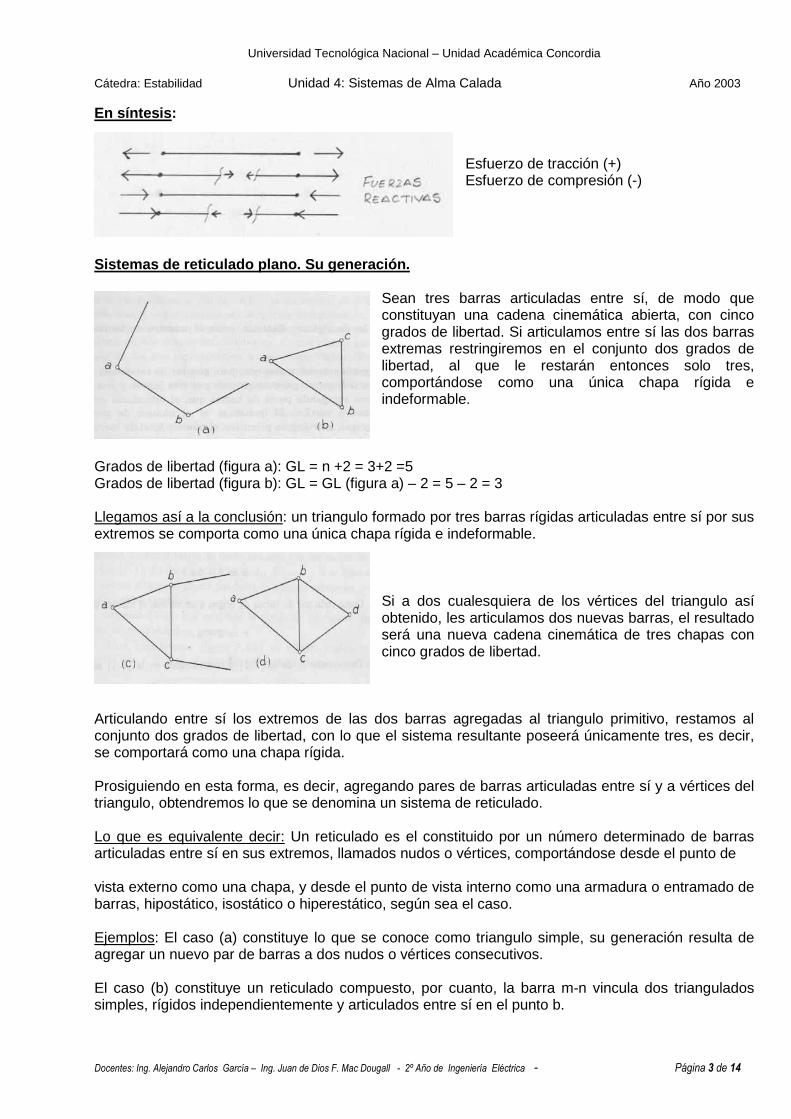
En síntesis :
Esfuerzo de tracción (+) Esfuerzo de compresión (-)
Sistemas de reticulado plano. Su generación.
Sean tres barras articuladas entre sí, de modo que constituyan una cadena cinemática abierta, con cinco grados de libertad. Si articulamos entre sí las dos barras extremas restringiremos en el conjunto dos grados de libertad, al que le restarán entonces solo tres, comportándose como una única chapa rígida e indeformable.
Grados de libertad (figura a): GL = n +2 = 3+2 =5 Grados de libertad (figura b): GL = GL (figura a) – 2 = 5 – 2 = 3 Llegamos así a la conclusión: un triangulo formado por tres barras rígidas articuladas entre sí por sus extremos se comporta como una única chapa rígida e indeformable.
Si a dos cualesquiera de los vértices del triangulo así obtenido, les articulamos dos nuevas barras, el resultado será una nueva cadena cinemática de tres chapas con cinco grados de libertad.
Articulando entre sí los extremos de las dos barras agregadas al triangulo primitivo, restamos al conjunto dos grados de libertad, con lo que el sistema resultante poseerá únicamente tres, es decir, se comportará como una chapa rígida. Prosiguiendo en esta forma, es decir, agregando pares de barras articuladas entre sí y a vértices del triangulo, obtendremos lo que se denomina un sistema de reticulado. Lo que es equivalente decir: Un reticulado es el constituido por un número determinado de barras articuladas entre sí en sus extremos, llamados nudos o vértices, comportándose desde el punto de vista externo como una chapa, y desde el punto de vista interno como una armadura o entramado de barras, hipostático, isostático o hiperestático, según sea el caso. Ejemplos: El caso (a) constituye lo que se conoce como triangulo simple, su generación resulta de agregar un nuevo par de barras a dos nudos o vértices consecutivos. El caso (b) constituye un reticulado compuesto, por cuanto, la barra m-n vincula dos triangulados simples, rígidos independientemente y articulados entre sí en el punto b.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 4 de 14
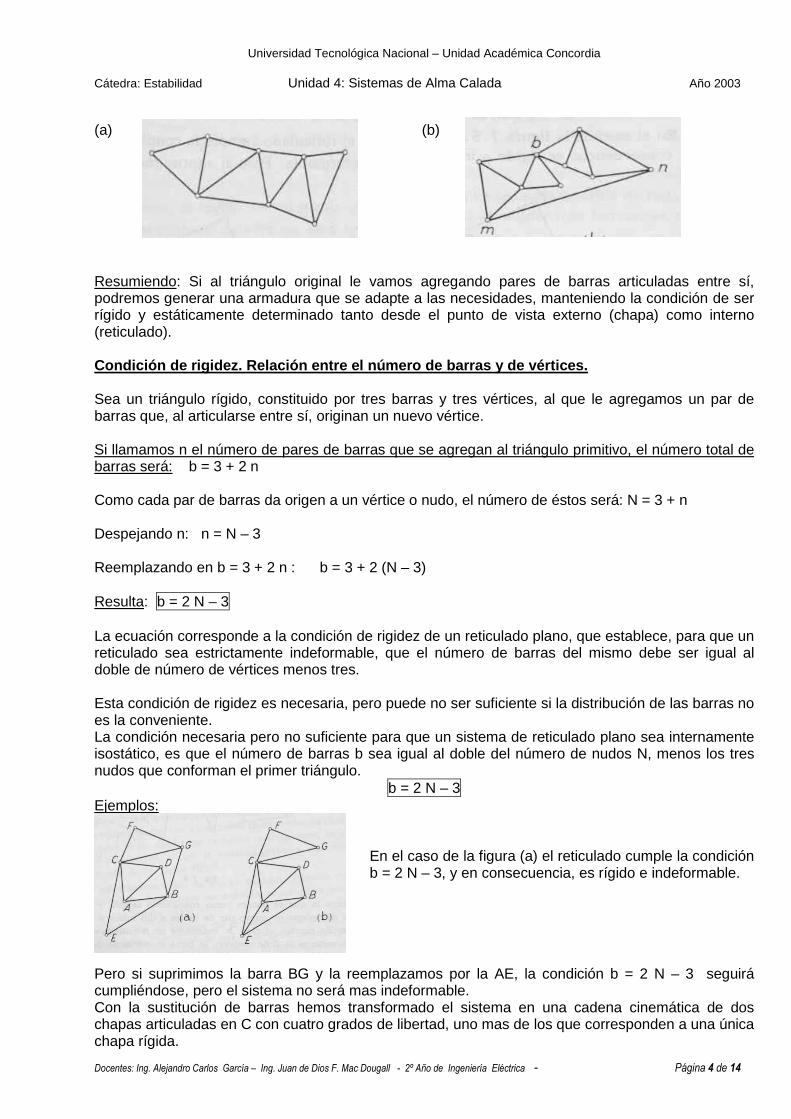
(a) (b) Resumiendo: Si al triángulo original le vamos agregando pares de barras articuladas entre sí, podremos generar una armadura que se adapte a las necesidades, manteniendo la condición de ser rígido y estáticamente determinado tanto desde el punto de vista externo (chapa) como interno (reticulado). Condición de rigidez. Relación entre el número de b arras y de vértices. Sea un triángulo rígido, constituido por tres barras y tres vértices, al que le agregamos un par de barras que, al articularse entre sí, originan un nuevo vértice. Si llamamos n el número de pares de barras que se agregan al triángulo primitivo, el número total de barras será: b = 3 + 2 n Como cada par de barras da origen a un vértice o nudo, el número de éstos será: N = 3 + n Despejando n: n = N – 3 Reemplazando en b = 3 + 2 n : b = 3 + 2 (N – 3) Resulta: b = 2 N – 3 La ecuación corresponde a la condición de rigidez de un reticulado plano, que establece, para que un reticulado sea estrictamente indeformable, que el número de barras del mismo debe ser igual al doble de número de vértices menos tres. Esta condición de rigidez es necesaria, pero puede no ser suficiente si la distribución de las barras no es la conveniente. La condición necesaria pero no suficiente para que un sistema de reticulado plano sea internamente isostático, es que el número de barras b sea igual al doble del número de nudos N, menos los tres nudos que conforman el primer triángulo.
b = 2 N – 3 Ejemplos:
En el caso de la figura (a) el reticulado cumple la condición b = 2 N – 3, y en consecuencia, es rígido e indeformable.
Pero si suprimimos la barra BG y la reemplazamos por la AE, la condición b = 2 N – 3 seguirá cumpliéndose, pero el sistema no será mas indeformable. Con la sustitución de barras hemos transformado el sistema en una cadena cinemática de dos chapas articuladas en C con cuatro grados de libertad, uno mas de los que corresponden a una única chapa rígida.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 5 de 14
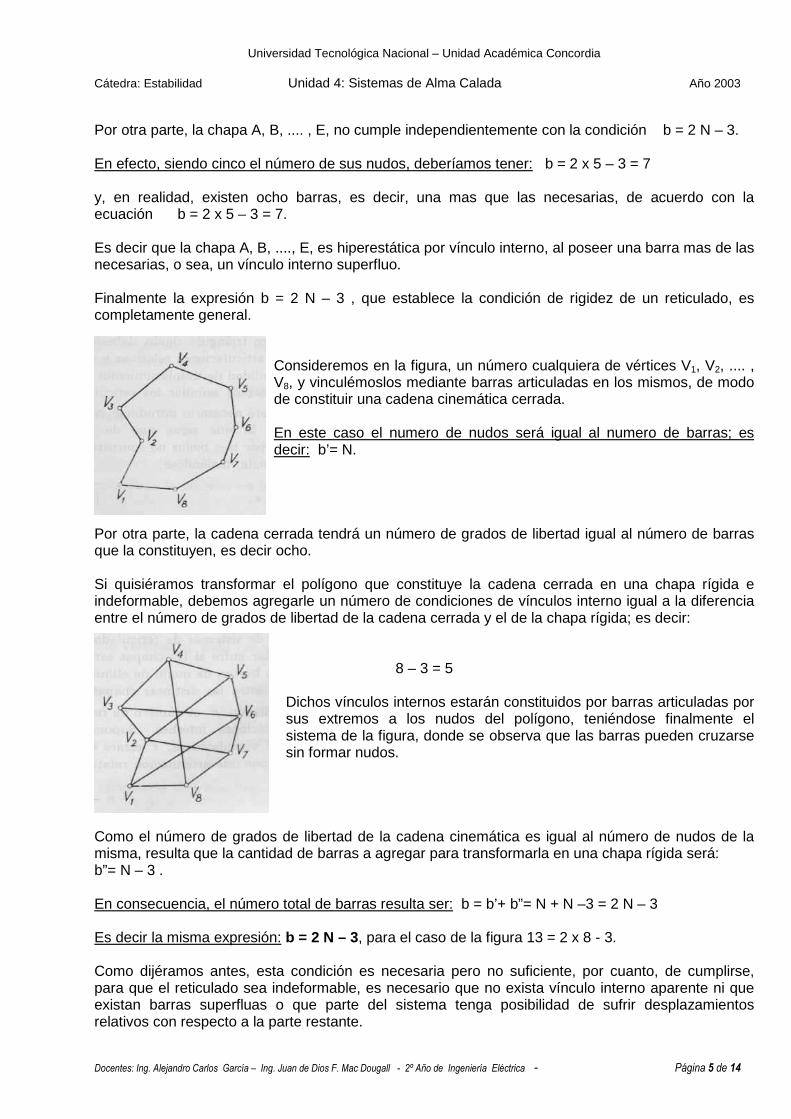
Por otra parte, la chapa A, B, .... , E, no cumple independientemente con la condición b = 2 N – 3. En efecto, siendo cinco el número de sus nudos, deberíamos tener: b = 2 x 5 – 3 = 7 y, en realidad, existen ocho barras, es decir, una mas que las necesarias, de acuerdo con la ecuación b = 2 x 5 – 3 = 7. Es decir que la chapa A, B, ...., E, es hiperestática por vínculo interno, al poseer una barra mas de las necesarias, o sea, un vínculo interno superfluo. Finalmente la expresión b = 2 N – 3 , que establece la condición de rigidez de un reticulado, es completamente general.
Consideremos en la figura, un número cualquiera de vértices V1, V2, .... , V8, y vinculémoslos mediante barras articuladas en los mismos, de modo de constituir una cadena cinemática cerrada. En este caso el numero de nudos será igual al numero de barras; es decir: b’= N.
Por otra parte, la cadena cerrada tendrá un número de grados de libertad igual al número de barras que la constituyen, es decir ocho. Si quisiéramos transformar el polígono que constituye la cadena cerrada en una chapa rígida e indeformable, debemos agregarle un número de condiciones de vínculos interno igual a la diferencia entre el número de grados de libertad de la cadena cerrada y el de la chapa rígida; es decir:
8 – 3 = 5
Dichos vínculos internos estarán constituidos por barras articuladas por sus extremos a los nudos del polígono, teniéndose finalmente el sistema de la figura, donde se observa que las barras pueden cruzarse sin formar nudos.
Como el número de grados de libertad de la cadena cinemática es igual al número de nudos de la misma, resulta que la cantidad de barras a agregar para transformarla en una chapa rígida será: b”= N – 3 . En consecuencia, el número total de barras resulta ser: b = b’+ b”= N + N –3 = 2 N – 3 Es decir la misma expresión: b = 2 N – 3, para el caso de la figura 13 = 2 x 8 - 3. Como dijéramos antes, esta condición es necesaria pero no suficiente, por cuanto, de cumplirse, para que el reticulado sea indeformable, es necesario que no exista vínculo interno aparente ni que existan barras superfluas o que parte del sistema tenga posibilidad de sufrir desplazamientos relativos con respecto a la parte restante.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 6 de 14
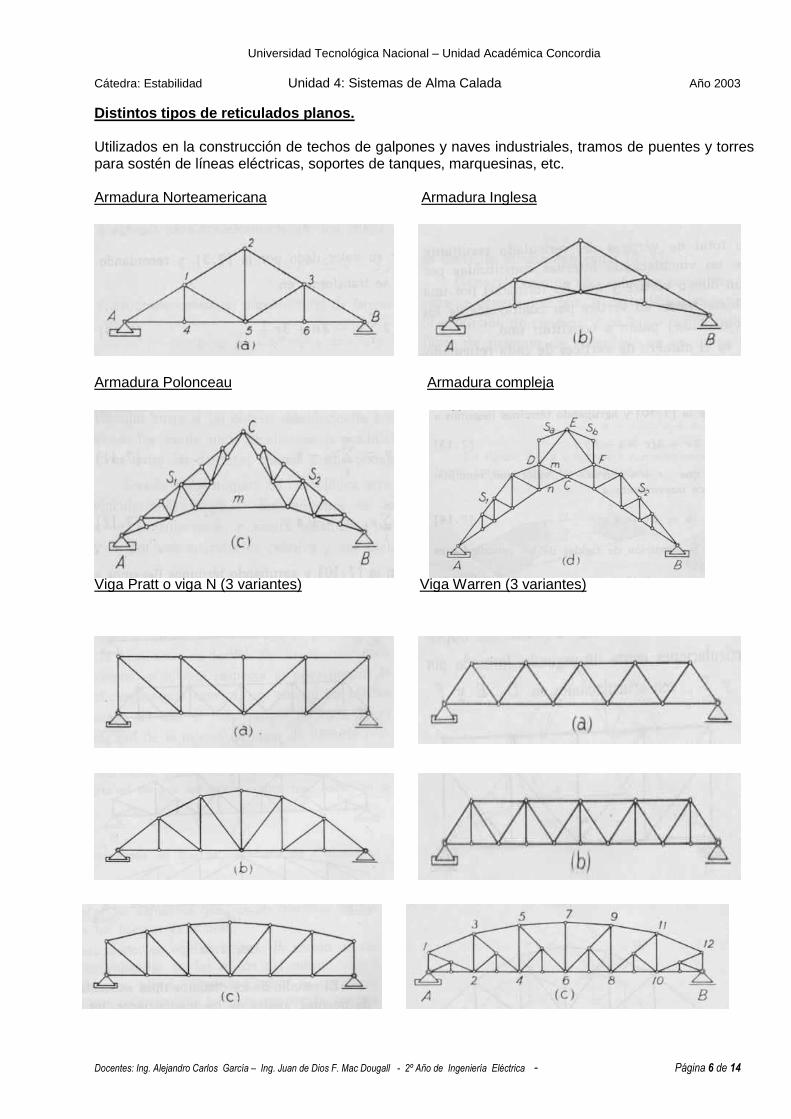
Distintos tipos de reticulados planos. Utilizados en la construcción de techos de galpones y naves industriales, tramos de puentes y torres para sostén de líneas eléctricas, soportes de tanques, marquesinas, etc. Armadura Norteamericana Armadura Inglesa Armadura Polonceau Armadura compleja Utilizados en la construcción de puentes. Viga Pratt o viga N (3 variantes) Viga Warren (3 variantes)
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 7 de 14
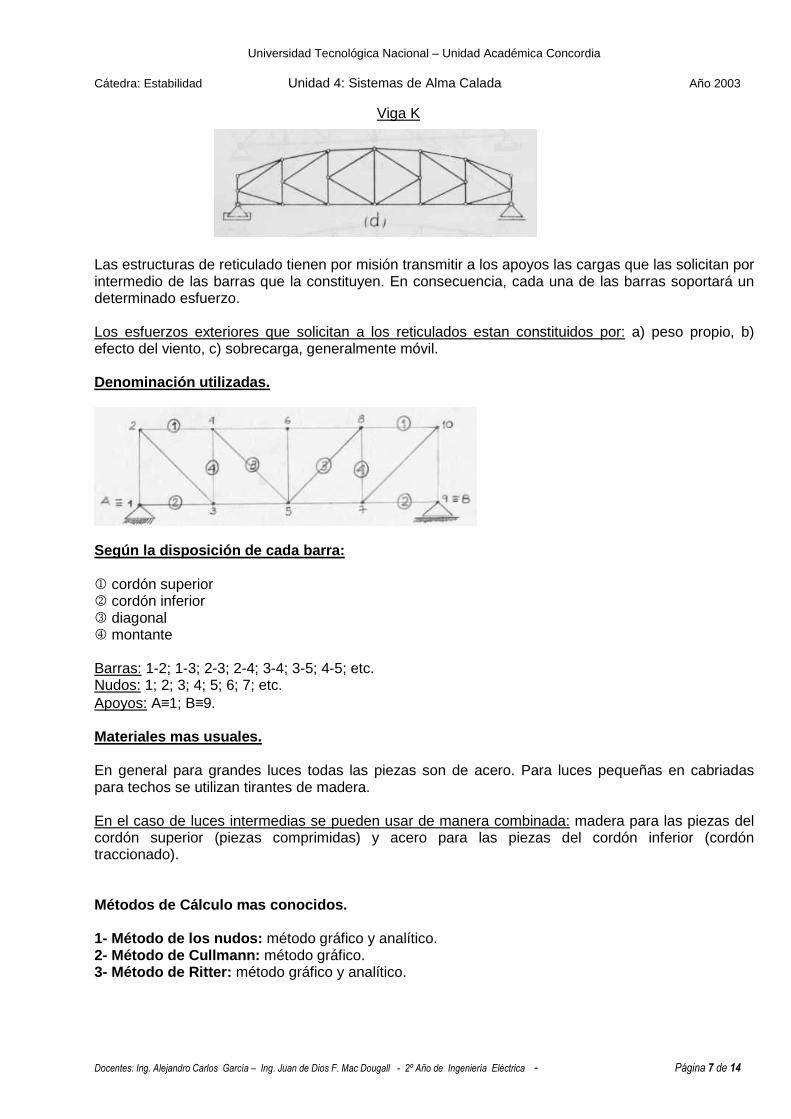
Viga K Las estructuras de reticulado tienen por misión transmitir a los apoyos las cargas que las solicitan por intermedio de las barras que la constituyen. En consecuencia, cada una de las barras soportará un determinado esfuerzo. Los esfuerzos exteriores que solicitan a los reticulados estan constituidos por: a) peso propio, b) efecto del viento, c) sobrecarga, generalmente móvil. Denominación utilizadas. Según la disposición de cada barra: 1 cordón superior 2 cordón inferior 3 diagonal 4 montante Barras: 1-2; 1-3; 2-3; 2-4; 3-4; 3-5; 4-5; etc. Nudos: 1; 2; 3; 4; 5; 6; 7; etc. Apoyos: A≡1; B≡9. Materiales mas usuales. En general para grandes luces todas las piezas son de acero. Para luces pequeñas en cabriadas para techos se utilizan tirantes de madera. En el caso de luces intermedias se pueden usar de manera combinada: madera para las piezas del cordón superior (piezas comprimidas) y acero para las piezas del cordón inferior (cordón traccionado). Métodos de Cálculo mas conocidos. 1- Método de los nudos: método gráfico y analítico. 2- Método de Cullmann: método gráfico. 3- Método de Ritter: método gráfico y analítico.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 8 de 14
1. Método de los nudos.
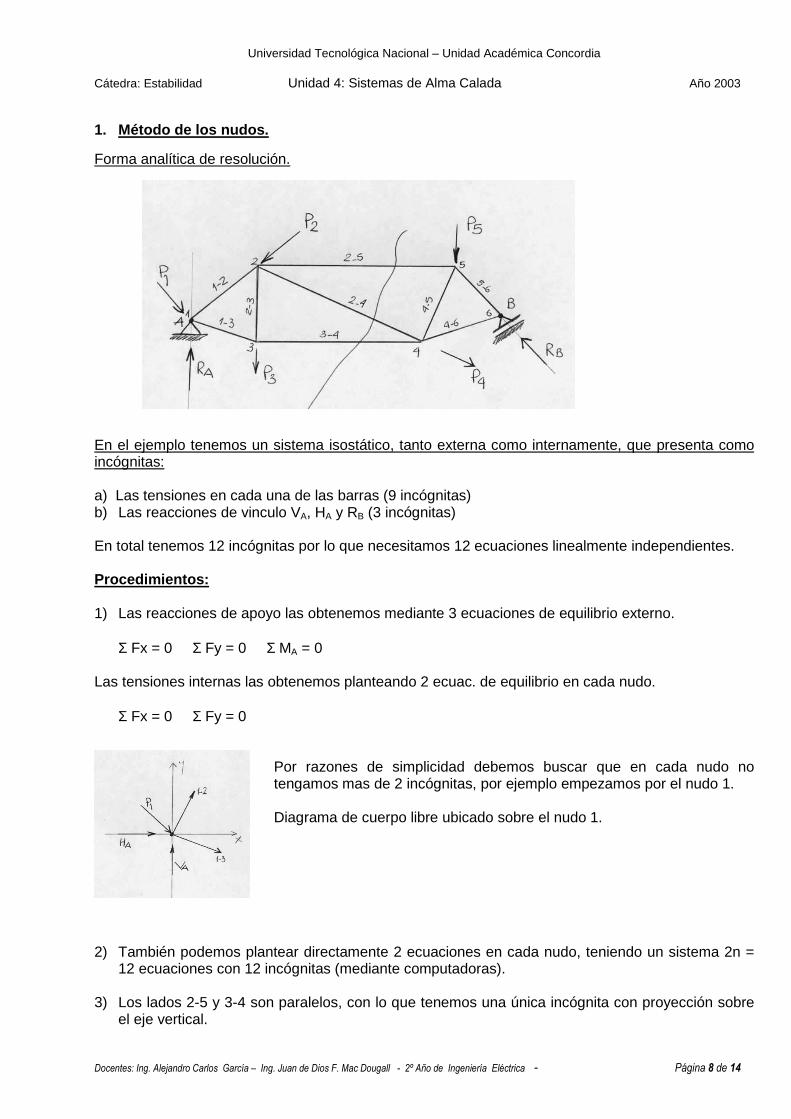
Forma analítica de resolución. En el ejemplo tenemos un sistema isostático, tanto externa como internamente, que presenta como incógnitas: a) Las tensiones en cada una de las barras (9 incógnitas) b) Las reacciones de vinculo VA, HA y RB (3 incógnitas) En total tenemos 12 incógnitas por lo que necesitamos 12 ecuaciones linealmente independientes. Procedimientos: 1) Las reacciones de apoyo las obtenemos mediante 3 ecuaciones de equilibrio externo.
Σ Fx = 0 Σ Fy = 0 Σ MA = 0
Las tensiones internas las obtenemos planteando 2 ecuac. de equilibrio en cada nudo. Σ Fx = 0 Σ Fy = 0
Por razones de simplicidad debemos buscar que en cada nudo no tengamos mas de 2 incógnitas, por ejemplo empezamos por el nudo 1.
Diagrama de cuerpo libre ubicado sobre el nudo 1.
2) También podemos plantear directamente 2 ecuaciones en cada nudo, teniendo un sistema 2n = 12 ecuaciones con 12 incógnitas (mediante computadoras).
3) Los lados 2-5 y 3-4 son paralelos, con lo que tenemos una única incógnita con proyección sobre
el eje vertical.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 9 de 14
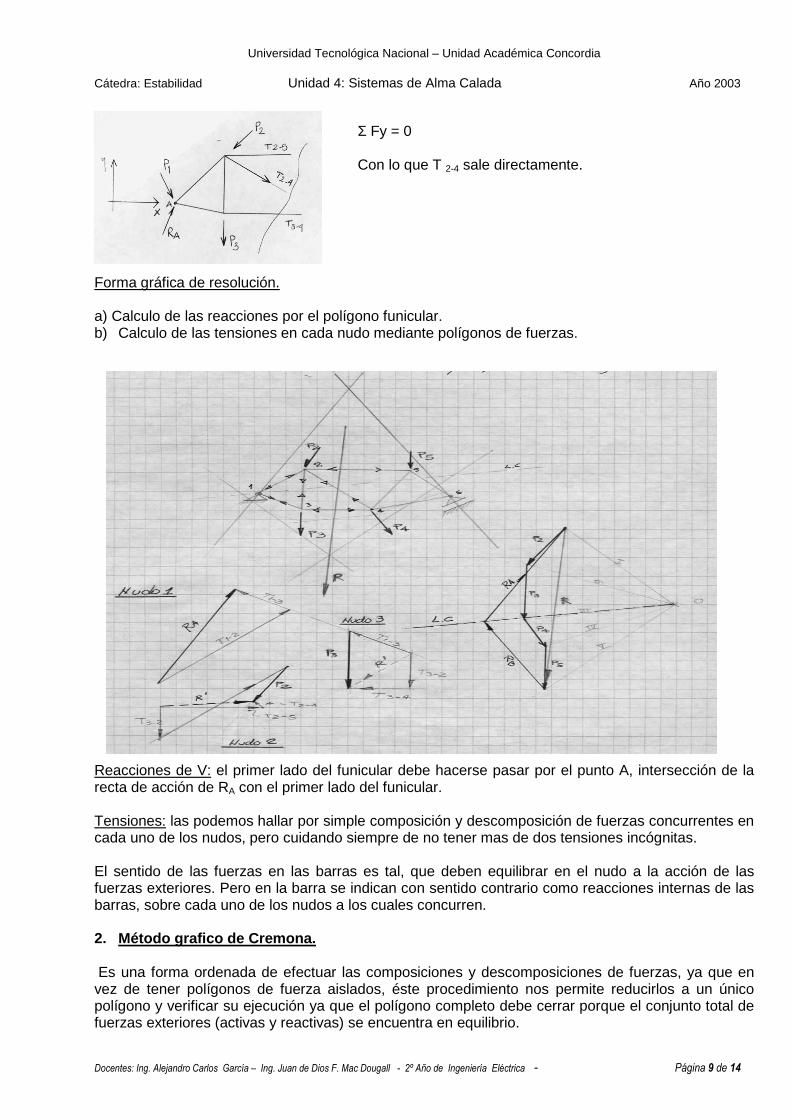
Σ Fy = 0 Con lo que T 2-4 sale directamente.
Forma gráfica de resolución. a) Calculo de las reacciones por el polígono funicular. b) Calculo de las tensiones en cada nudo mediante polígonos de fuerzas. Reacciones de V: el primer lado del funicular debe hacerse pasar por el punto A, intersección de la recta de acción de RA con el primer lado del funicular. Tensiones: las podemos hallar por simple composición y descomposición de fuerzas concurrentes en cada uno de los nudos, pero cuidando siempre de no tener mas de dos tensiones incógnitas. El sentido de las fuerzas en las barras es tal, que deben equilibrar en el nudo a la acción de las fuerzas exteriores. Pero en la barra se indican con sentido contrario como reacciones internas de las barras, sobre cada uno de los nudos a los cuales concurren. 2. Método grafico de Cremona. Es una forma ordenada de efectuar las composiciones y descomposiciones de fuerzas, ya que en vez de tener polígonos de fuerza aislados, éste procedimiento nos permite reducirlos a un único polígono y verificar su ejecución ya que el polígono completo debe cerrar porque el conjunto total de fuerzas exteriores (activas y reactivas) se encuentra en equilibrio.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 10 de 14
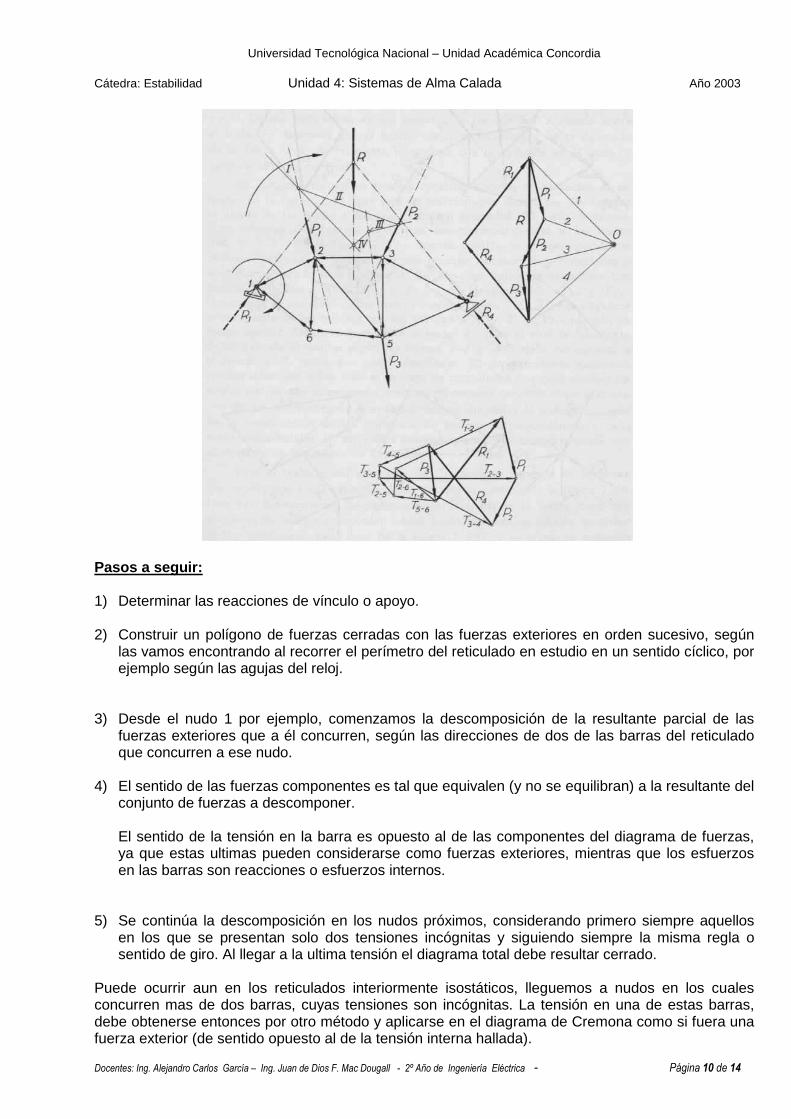
Pasos a seguir: 1) Determinar las reacciones de vínculo o apoyo. 2) Construir un polígono de fuerzas cerradas con las fuerzas exteriores en orden sucesivo, según
las vamos encontrando al recorrer el perímetro del reticulado en estudio en un sentido cíclico, por ejemplo según las agujas del reloj.
3) Desde el nudo 1 por ejemplo, comenzamos la descomposición de la resultante parcial de las
fuerzas exteriores que a él concurren, según las direcciones de dos de las barras del reticulado que concurren a ese nudo.
4) El sentido de las fuerzas componentes es tal que equivalen (y no se equilibran) a la resultante del
conjunto de fuerzas a descomponer. El sentido de la tensión en la barra es opuesto al de las componentes del diagrama de fuerzas, ya que estas ultimas pueden considerarse como fuerzas exteriores, mientras que los esfuerzos en las barras son reacciones o esfuerzos internos.
5) Se continúa la descomposición en los nudos próximos, considerando primero siempre aquellos en los que se presentan solo dos tensiones incógnitas y siguiendo siempre la misma regla o sentido de giro. Al llegar a la ultima tensión el diagrama total debe resultar cerrado.
Puede ocurrir aun en los reticulados interiormente isostáticos, lleguemos a nudos en los cuales concurren mas de dos barras, cuyas tensiones son incógnitas. La tensión en una de estas barras, debe obtenerse entonces por otro método y aplicarse en el diagrama de Cremona como si fuera una fuerza exterior (de sentido opuesto al de la tensión interna hallada).
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 11 de 14
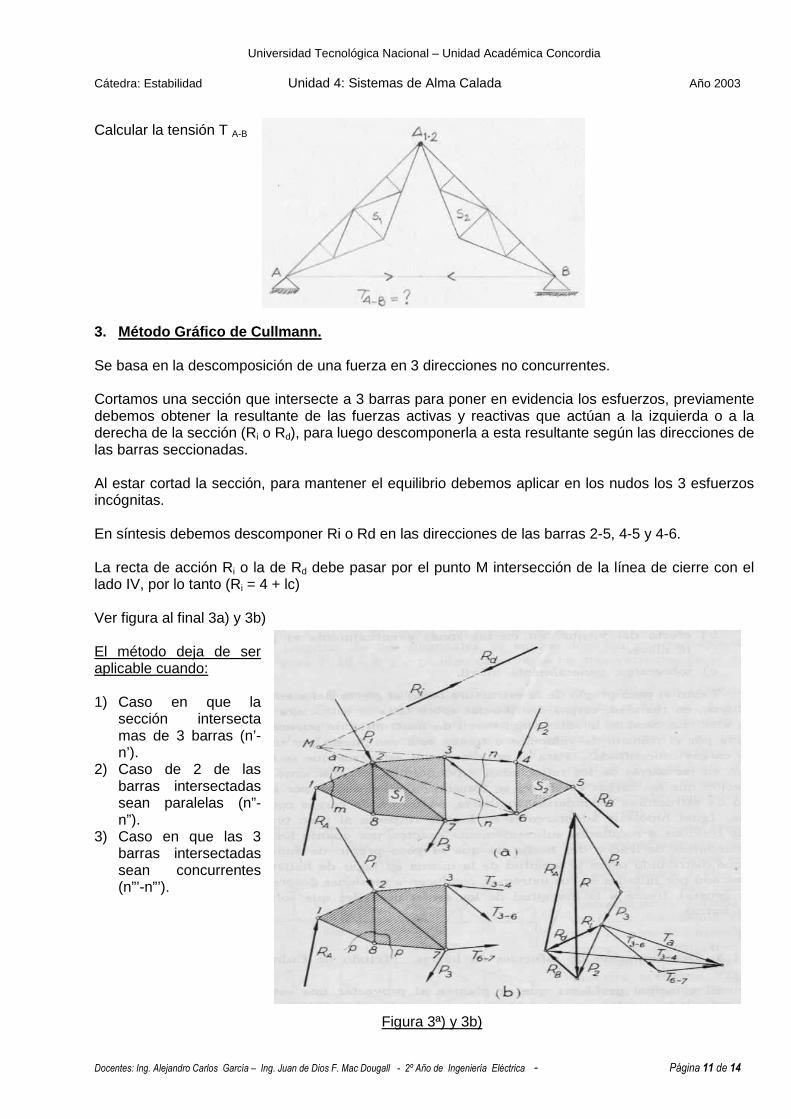
Calcular la tensión T A-B
3. Método Gráfico de Cullmann. Se basa en la descomposición de una fuerza en 3 direcciones no concurrentes. Cortamos una sección que intersecte a 3 barras para poner en evidencia los esfuerzos, previamente debemos obtener la resultante de las fuerzas activas y reactivas que actúan a la izquierda o a la derecha de la sección (Ri o Rd), para luego descomponerla a esta resultante según las direcciones de las barras seccionadas. Al estar cortad la sección, para mantener el equilibrio debemos aplicar en los nudos los 3 esfuerzos incógnitas. En síntesis debemos descomponer Ri o Rd en las direcciones de las barras 2-5, 4-5 y 4-6. La recta de acción Ri o la de Rd debe pasar por el punto M intersección de la línea de cierre con el lado IV, por lo tanto (Ri = 4 + lc) Ver figura al final 3a) y 3b) El método deja de ser aplicable cuando: 1) Caso en que la
sección intersecta mas de 3 barras (n’-n’).
2) Caso de 2 de las barras intersectadas sean paralelas (n”-n”).
3) Caso en que las 3 barras intersectadas sean concurrentes (n”’-n”’).
Figura 3ª) y 3b)
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 12 de 14
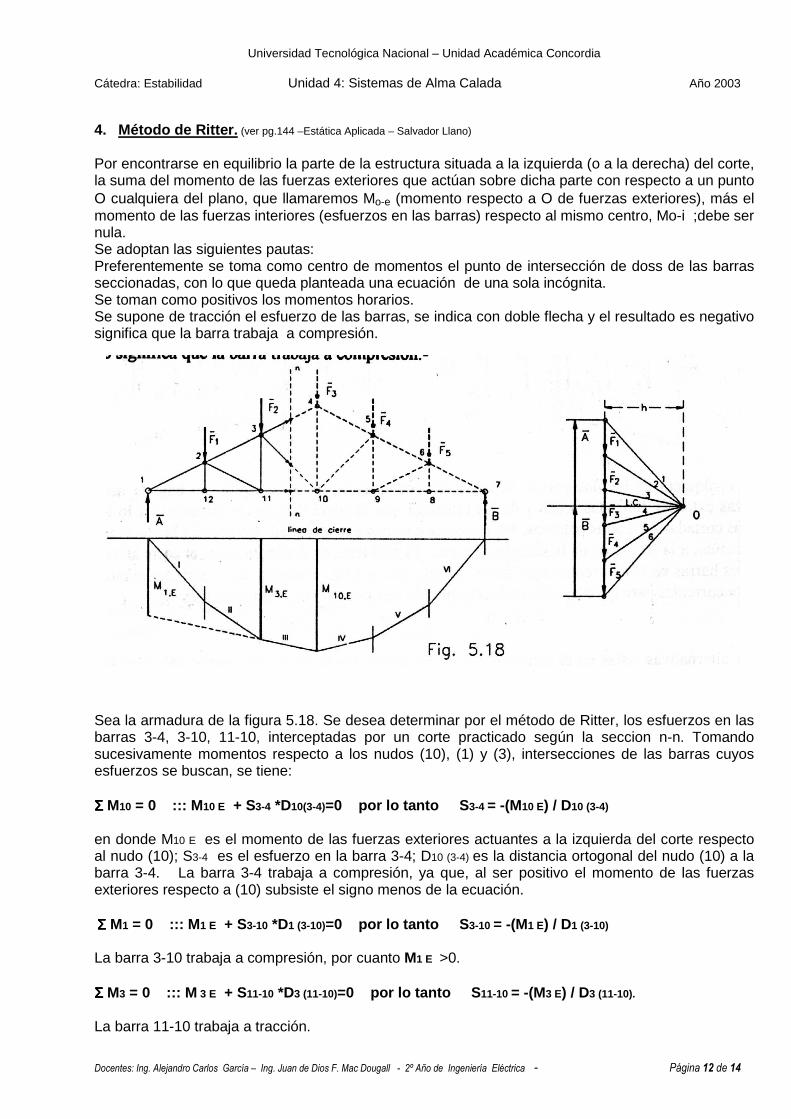
4. Método de Ritter. (ver pg.144 –Estática Aplicada – Salvador Llano) Por encontrarse en equilibrio la parte de la estructura situada a la izquierda (o a la derecha) del corte, la suma del momento de las fuerzas exteriores que actúan sobre dicha parte con respecto a un punto O cualquiera del plano, que llamaremos Mo-e (momento respecto a O de fuerzas exteriores), más el momento de las fuerzas interiores (esfuerzos en las barras) respecto al mismo centro, Mo-i ;debe ser nula. Se adoptan las siguientes pautas: Preferentemente se toma como centro de momentos el punto de intersección de doss de las barras seccionadas, con lo que queda planteada una ecuación de una sola incógnita. Se toman como positivos los momentos horarios. Se supone de tracción el esfuerzo de las barras, se indica con doble flecha y el resultado es negativo significa que la barra trabaja a compresión.
Sea la armadura de la figura 5.18. Se desea determinar por el método de Ritter, los esfuerzos en las barras 3-4, 3-10, 11-10, interceptadas por un corte practicado según la seccion n-n. Tomando sucesivamente momentos respecto a los nudos (10), (1) y (3), intersecciones de las barras cuyos esfuerzos se buscan, se tiene: ΣΣΣΣ M10 = 0 ::: M 10 E + S3-4 *D10(3-4)=0 por lo tanto S 3-4 = -(M10 E) / D10 (3-4) en donde M10 E es el momento de las fuerzas exteriores actuantes a la izquierda del corte respecto al nudo (10); S3-4 es el esfuerzo en la barra 3-4; D10 (3-4) es la distancia ortogonal del nudo (10) a la barra 3-4. La barra 3-4 trabaja a compresión, ya que, al ser positivo el momento de las fuerzas exteriores respecto a (10) subsiste el signo menos de la ecuación. ΣΣΣΣ M1 = 0 ::: M 1 E + S3-10 *D1 (3-10)=0 por lo tanto S 3-10 = -(M1 E) / D1 (3-10) La barra 3-10 trabaja a compresión, por cuanto M1 E >0. ΣΣΣΣ M3 = 0 ::: M 3 E + S11-10 *D3 (11-10)=0 por lo tanto S 11-10 = -(M3 E) / D3 (11-10). La barra 11-10 trabaja a tracción.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 13 de 14
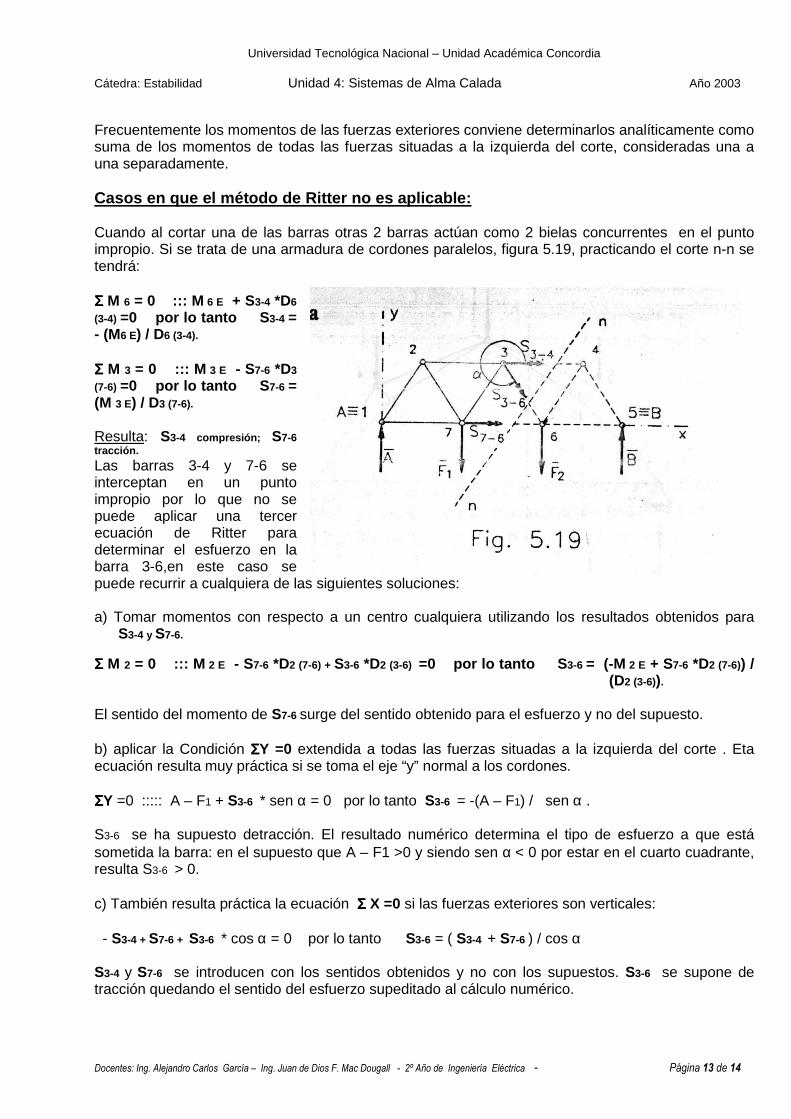
Frecuentemente los momentos de las fuerzas exteriores conviene determinarlos analíticamente como suma de los momentos de todas las fuerzas situadas a la izquierda del corte, consideradas una a una separadamente. Casos en que el método de Ritter no es aplicable:
Cuando al cortar una de las barras otras 2 barras actúan como 2 bielas concurrentes en el punto impropio. Si se trata de una armadura de cordones paralelos, figura 5.19, practicando el corte n-n se tendrá: ΣΣΣΣ M 6 = 0 ::: M 6 E + S3-4 *D6
(3-4) =0 por lo tanto S 3-4 = - (M6 E) / D6 (3-4). ΣΣΣΣ M 3 = 0 ::: M 3 E - S7-6 *D3
(7-6) =0 por lo tanto S 7-6 = (M 3 E) / D3 (7-6). Resulta: S3-4 compresión; S7-6 tracción. Las barras 3-4 y 7-6 se interceptan en un punto impropio por lo que no se puede aplicar una tercer ecuación de Ritter para determinar el esfuerzo en la barra 3-6,en este caso se puede recurrir a cualquiera de las siguientes soluciones: a) Tomar momentos con respecto a un centro cualquiera utilizando los resultados obtenidos para
S3-4 y S7-6.
ΣΣΣΣ M 2 = 0 ::: M 2 E - S7-6 *D2 (7-6) + S3-6 *D2 (3-6) =0 por lo tanto S 3-6 = (-M 2 E + S7-6 *D2 (7-6)) / (D2 (3-6)).
El sentido del momento de S7-6 surge del sentido obtenido para el esfuerzo y no del supuesto. b) aplicar la Condición ΣΣΣΣY =0 extendida a todas las fuerzas situadas a la izquierda del corte . Eta ecuación resulta muy práctica si se toma el eje “y” normal a los cordones. ΣΣΣΣY =0 ::::: A – F1 + S3-6 * sen α = 0 por lo tanto S3-6 = -(A – F1) / sen α . S3-6 se ha supuesto detracción. El resultado numérico determina el tipo de esfuerzo a que está sometida la barra: en el supuesto que A – F1 >0 y siendo sen α < 0 por estar en el cuarto cuadrante, resulta S3-6 > 0. c) También resulta práctica la ecuación ΣΣΣΣ X =0 si las fuerzas exteriores son verticales: - S3-4 + S7-6 + S3-6 * cos α = 0 por lo tanto S3-6 = ( S3-4 + S7-6 ) / cos α S3-4 y S7-6 se introducen con los sentidos obtenidos y no con los supuestos. S3-6 se supone de tracción quedando el sentido del esfuerzo supeditado al cálculo numérico.
Universidad Tecnológica Nacional – Unidad Académica Concordia
Cátedra: Estabilidad Unidad 4: Sistemas de Alma Calada Año 2003
Docentes: Ing. Alejandro Carlos García – Ing. Juan de Dios F. Mac Dougall - 2º Año de Ingeniería Eléctrica - Página 14 de 14
BIBLIOGRAFÍA
� ESTABILIDAD (Primer curso) – Enrique D. Fliess – Editorial Kapelusz (1970). � ESTATICA APLICADA – Raúl Salvador Llano – Universidad Nacional de Cuyo-Facultad de
Ingeniería. � CURSO MEDIO DE RESISTENCIA DE MATERIALES – Enrique Panseri – Editorial
Construcciones Sudamericanas (1969).