Tema 2 Análisis Dinámico de...
30
Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 1 de 30 Tema 2 Análisis Dinámico de Sistemas 2º Ing. Telecomunicación
Transcript of Tema 2 Análisis Dinámico de...

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 1 de 30
Tema 2
Análisis Dinámico de Sistemas2º Ing. Telecomunicación

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 2 de 30
Ecuaciones Diferenciales y Dinámicadefinición de la RAE
4. m. Esquema teórico, generalmente en formamatemática, de un sistema o de una realidadcompleja, como la evolución económica de un país,que se elabora para facilitar su comprensión y elestudio de su comportamiento.
Modelo: (definición de la RAE)

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 3 de 30
Ecuaciones Diferenciales y Dinámicamodelo dinámico
• Uno de los modelos dinámicos más típicos en Ingenieríaes la Ecuación Diferencial
• En muchos procesos y sistemas son necesarias variasecuaciones diferenciales para describir adecuadamentela dinámica
Modelo DinámicoUn modelo dinámico constituye una descripción,generalmente matemática,del comportamiento dinámico un sistema.

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 4 de 30
Ecuaciones Diferenciales y Dinámicaprincipio de simplicidad• Casi siempre, los modelos son aproximaciones más o menos precisas del
proceso.• Depende de qué se “tenga en cuenta” y qué se “desprecia” en el modelo (ej. a
veces se desprecia el rozamiento del aire, etc.)
simplicidad precisión
Navaja de Occam:Buscar el modelo más simple posible
que describa suficientementelos factores que necesitamos analizar
en función de nuestro problema
¿qué debemos despreciar?
• Estudiar el contexto del problema• ¿qué factores importan?• ¿qué factores pueden despreciarse?• ¿qué simplificaciones son asumibles?

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 5 de 30
Ecuaciones Diferenciales y Dinámicaecuación diferencial
De una forma muy general, un sistema SISOpuede modelarse según una ecuación diferencial del tipo
Gráficamente,

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 6 de 30
Ecuaciones Diferenciales y Dinámicaejemplo de sistema dinámico: masa en movimiento
segunda ley de Newton:
mF(t)
x(t)
Sistema(masa)
Sistema(masa)
F(t) x(t)
causa(entrada)
respuesta(salida)

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 7 de 30
Ecuaciones Diferenciales y Dinámicaejemplo de sistema dinámico: depósito
caudalde
entrada
caudalde
salida qs(t) depósitodepósitoqe(t) h(t)
causa(entrada)
qs(t)
respuestas(salidas)
[Ogata, p. 125]

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 8 de 30
Ecuaciones Diferenciales y Dinámicaejemplo de sistema dinámico: sistema de amortiguación
m
K bx0
xi
[Ogata, p. 114]
vehículovehículoxi(t) xo(t)
causa(entrada)
respuesta(salida)

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 9 de 30
Linealidad y Superposición
Un sistema es lineal si y solo si verifica el principio de superposición:
si
entonces

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 10 de 30
Linealidad y Superposición
La siguiente ecuación diferencial
se denominaEcuación Diferencial Lineal de coeficientes constantes (EDL-CC)
Este modelo matemático:• verifica la propiedad de superposición• describe con precisión la dinámica de muchos sistemas físicos
Ejercicio:Demostrar la linealidad de la EDL-CCcomprobando que verifica el principio de superposición

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 11 de 30
Linealidad y Superposición
• También muchos sistemas son nolineales (ej: el depósito: demostrar queel depósito es un sistema lineal y quelos ejemplos de la masa y del sistemade amortiguación son lineales)
• Para sistemas no lineales no sonaplicables muchos de los métodos deanálisis y modelado
• Muchos sistemas son lineales pornaturaleza
• Existen métodos eficientes paratrabajar con sistemas lineales
Sistemas Lineales Sistemas No Lineales
LinealizaciónObtener un modelo lineal aproximado
a partir de un modelo no lineal

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 12 de 30
Sistema Físico
Modelo lineal
Métodos aplicables asistemas lineales
Modelo no lineal simulación
leyes de la Física
Linealización
Cálculo operacionalmodelos gráficostécnicas frecuenciales
Validación
Computador(simulink, Matlab)
Metodología de trabajo

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 13 de 30
Procedimiento de Linealización
Una función f(x) puede aproximarse por Taylor:
Tomando términos de primer orden términosde orden superior
(punto de equilibrio)

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 14 de 30
Para una función de varias variables,
siendo
el punto de equilibrio, en torno al cual es válida la aproximación
Procedimiento de Linealización
la aproximación lineal (términos de orden 1) sería:
Residuo(términos de orden ≥ 2)

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 15 de 30
para el caso
Procedimiento de Linealización

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 16 de 30
Punto de equilibrioEl punto en torno al cual se linealizadebe ser un punto de equilibro del sistema
Procedimiento de Linealizaciónpunto de equilibrio
Dado que en el equilibrio el sistema no varíalas derivadas temporales son cero en dicho punto
... entonces se cumple que
0
0
En general,se cumple, por tanto,

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 17 de 30
Procedimiento de Linealización
definiendo:
queda finalmente:

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 18 de 30
Procedimiento de Linealización
puesto de otra forma (redefiniendo las constantes) queda:
o bien,
que es de la forma

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 19 de 30
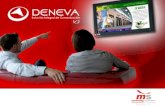
Procedimiento de Linealizacióninterpretación gráfica
x0
y0 punto de equilibrio
y = f(x)y-y0 = K(x-x0)
modelo linealizado
modelono lineal
puntode equilibrio
error muypequeño
proximidades del pto de equilibrio
(x0,y0)
error grandesi nosdesviamosdel ptode equilibrio

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 20 de 30
Procedimiento de Linealizaciónaspectos prácticos• El punto de trabajo es el estado de funcionamiento del sistema en
torno al cual vamos a trabajar, y debe ser un estado de equilibrio � lasderivadas temporales son cero
d/dt = 0
• Validez �El modelo lineal describe bien al real cuando el sistemaevoluciona cerca del punto de equilibrio. Lejos del punto de equilibrio elmodelo linealizado pierde precisión.
• Elección del punto de equilibrio �El punto de equilibrio debe elegirselo + próximo posible a los puntos de funcionamiento previsibles delsistema en las condiciones de funcionamiento habituales
• ¿cuánto me puedo alejar? � experiencia, sentido común, simulación...

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 21 de 30
caudalde
entrada
caudalde
salida qs(t)
Procedimiento de Linealizaciónejemplo del depósito / enunciado
Linealizar en torno a un punto de equilibrio definido por h0 = 1
datos:

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 22 de 30
Procedimiento de Linealizaciónejemplo del depósito / aproximación por Taylor

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 23 de 30
Procedimiento de Linealizaciónejemplo del depósito / punto de equilibrio

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 24 de 30
Procedimiento de Linealizaciónejemplo del depósito / modelo lineal
sustituyendo, queda al final
o utilizando la notación de las deltas,

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 25 de 30
Procedimiento de Linealizaciónejemplo del depósito / simulación
variación respectoal punto de equilibrio

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 26 de 30
Procedimiento de Linealizaciónejemplo / enunciado
Linealizar la siguiente ecuación
en torno al punto de equilibrio dado por x0 = 4

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 27 de 30
La aproximación por Taylor de la función es:
Solución:
Procedimiento de Linealizaciónejemplo / aproximación por Taylor

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 28 de 30
Procedimiento de Linealizaciónejemplo / aproximación por TaylorCalculando las parciales de f respecto a las variables...
Queda el siguiente modelo
Utilizando la otra notación: donde denotamos

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 29 de 30
Procedimiento de Linealizaciónejemplo / determinación del punto de equilibrio
Tenemos dos soluciones � hay dos puntos de equilibrio
Nota:Si el modelo tuviese un sentido físico,deberíamos elegir el punto más verosímily descartar los que no tengan sentido.
En este caso es matemática pura y los dos pueden valer.
Eligiendo un pto de equilibrioen el que se anulen las derivadasqueda,

Octubre de 2003 Análisis Dinámico de Sistemas (2º Teleco, EPSIG) 30 de 30
Procedimiento de Linealizaciónejemplo / modelo lineal
Si elegimos y0=2,
Si elegimos y0=-2,