
Tarea sensor magnetico
14
Sensores magnéticos
-
Upload
marcos-juarez-moreno -
Category
Documents
-
view
198 -
download
1
Transcript of Tarea sensor magnetico
Introducción
En la vida cotidiana nos encontramos rodeados de diferentes situaciones en las cuales algunas veces es necesario tener mediciones para prevenir o simplemente estar informados, para ello se ocupan ciertos instrumentos de medición y de análisis dentro de este gran numero de instrumentos nos encontramos los sensores, que son aplicables en la mayoría de las veces, de cada diez mediciones se ocupan en nueve ocasiones, por ello es que es importante entender su funcionamiento y como es que transforman las señales analógicas a señales digitales, sin afectar los datos y manteniendo la información en buen estado.
Los sensores son requeridos en la industria, en el área académica y en la mayoría de los campos existentes, en especial en el campo de la investigación La informática esta sumamente relacionada con todos los sensores debido a que es medio para la interacción humano-computadora, y así se manipulen los datos y se trabaje sobre ellos.
Que es un sensor
Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, movimiento, pH, etc. Una magnitud eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad), una Tensión eléctrica (como en un termopar), una corriente eléctrica (como en un fototransistor), etc.
Características de un sensor-Rango de medida: dominio en la magnitud medida en el que puede aplicarse el sensor.-Precisión: es el error de medida máximo esperado.-Offset o desviación de cero: valor de la variable de salida cuando la variable de entrada es nula. Si el rango de medida no llega a valores nulos de la variable de entrada, habitualmente se establece otro punto de referencia para definir el offset.Linealidad o correlación lineal.-Sensibilidad de un sensor: suponiendo que es de entrada a salida y la variación de la magnitud de entrada.-Resolución: mínima variación de la magnitud de entrada que puede apreciarse a la salida.-Rapidez de respuesta: puede ser un tiempo fijo o depender de cuánto varíe la magnitud a medir. Depende de la capacidad del sistema para seguir las variaciones de la magnitud de entrada.-Derivas: son otras magnitudes, aparte de la medida como magnitud de entrada, que influyen en la variable de salida. Por ejemplo, pueden ser condiciones ambientales, como la humedad, la temperatura u otras como el envejecimiento (oxidación, desgaste, etc.) del sensor.-Repetitividad: error esperado al repetir varias veces la misma medida.
Sensores inductivosUno de los elementos o podríamos llamar actores principales de la automatización industrial son los detectores o sensores que nos aportan información sobre el proceso de forma que podamos tomar las decisiones adecuadas de control en cada parte de un proceso controlado automáticamente.Los sensores sustituyen la labor del controlador humano que en un sistema de producción sin automatizar o semiautomático decide el momento en que se debe activar una resistencia de calentamiento, accionar el movimiento de un motor…Los distintos detectores, sensores disponibles se agrupan bajo un nombre o técnica conocido como sensórica que sería esa parte de la técnica encargada del estudio y clasificación de los distintos métodos y soluciones de detección para cualquier tipo de señal.Uno de esos tipos de sensores son los sensores inductivos. Ampliamente utilizados a todos los niveles de automatización haremos un repaso sobre sus características y principio de funcionamiento.
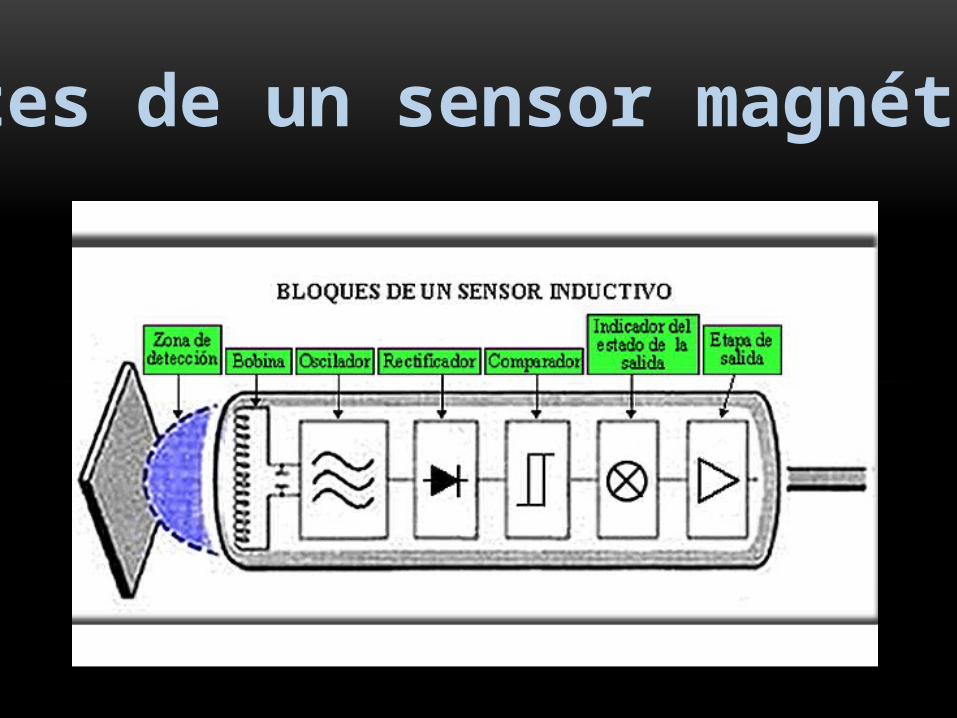
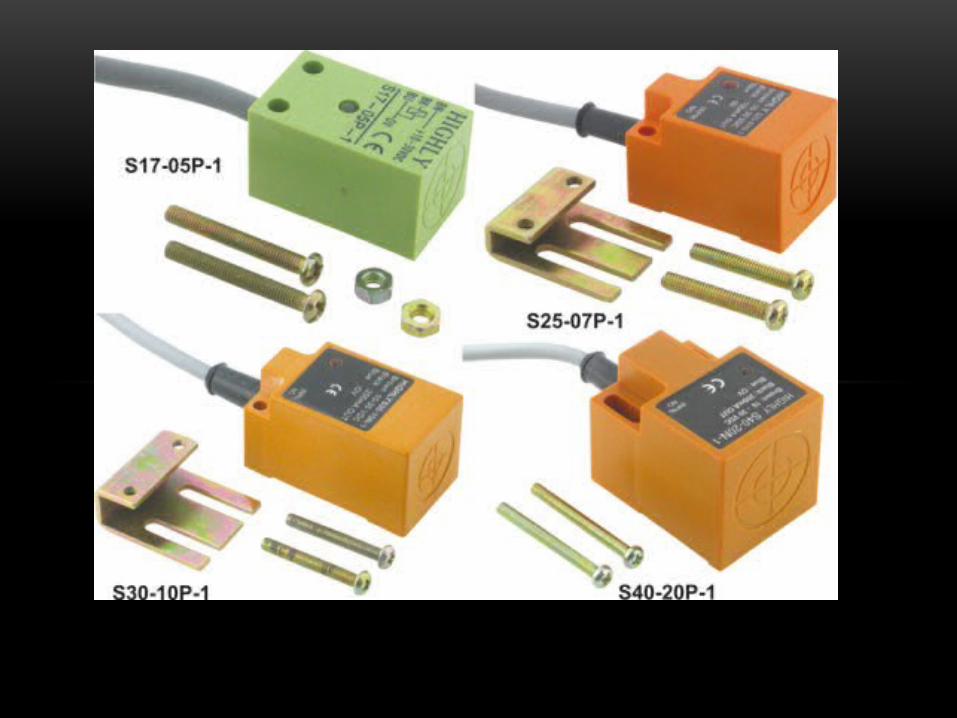
Partes de un sensor magnético
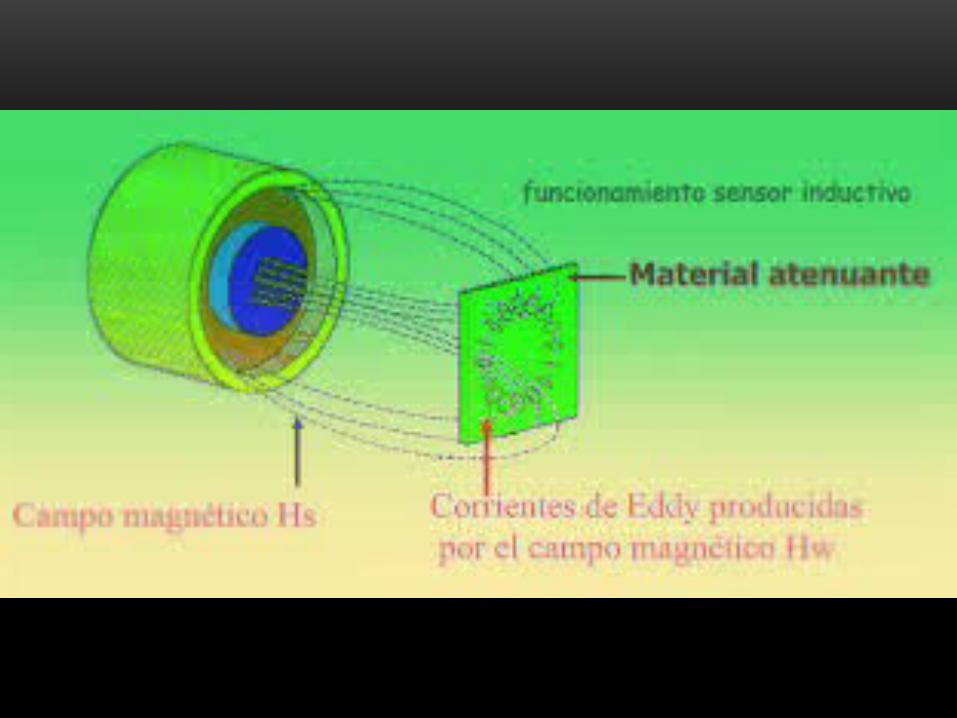
Como funciona
El principio básico consiste en conseguir el disparo de señal provocado en el comparador que detecta cambios entre la señal emitida por el oscilador y la señal detectada por el circuito de inducción al aproximarse a un cuerpo que provoque cambios en el campo magnético inicial generado por el oscilador. En realidad, al aproximar el campo magnético generado a un cuerpo metálico conductor, se generan a su vez una inducción eléctrica en dicho conductor. Esa tensión provoca la aparición de corrientes internas de Foucault que a su vez generan un campo inducido de respuesta al generado por el detector. El campo resultante es detectado en el comparador y ante un cambio desencadena el proceso de detección. Excitando de esa manera la etapa de salida.La etapa de salida consiste en una etapa transistorizada caracterizada por la activación de un transistor bipolar. Este transistor bipolar puede ser de dos tipos, PNP o NPN.Las tensiones de trabajo de este tipo de sensores son 24 voltios en Corriente Continua. 24VDC. Y sus tipos de conexiones más habituales son a 3 hilos y a 2 hilos.
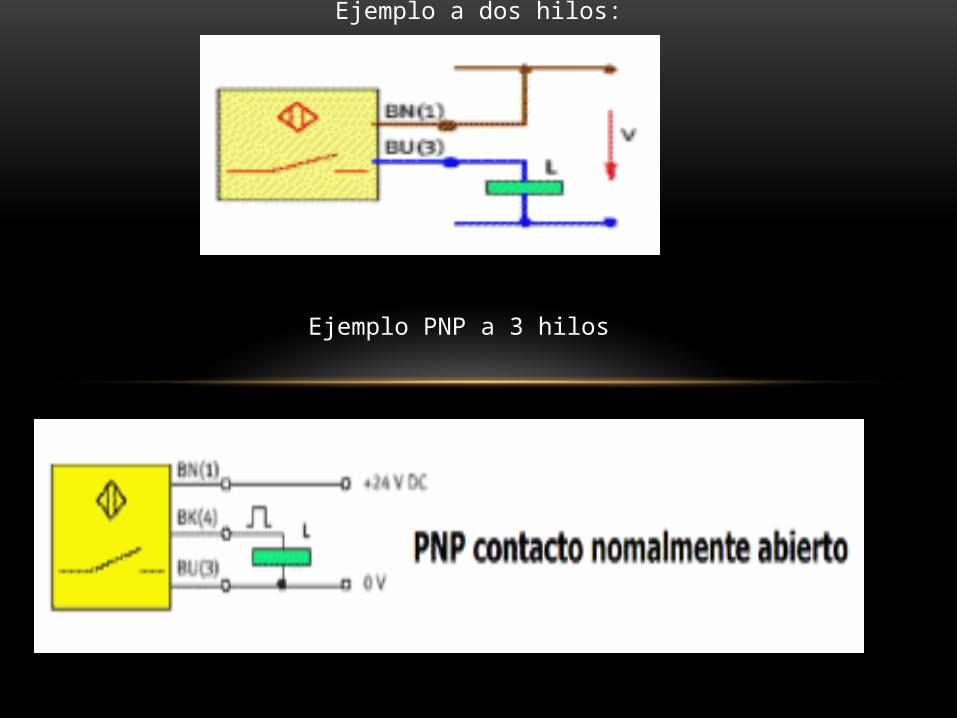
Ejemplo a dos hilos:
Ejemplo PNP a 3 hilos

Curva de Respuesta:El factor más determinante del rango de detección de un detector inductivo es el
tamaño del mismo, a mayor tamaño, mayor potencia del circuito del oscilador y por tanto mayo distancia de detección.
Es importante seleccionar siempre un detector cuyo rango cubra ampliamente la distancia de detección requerida en la aplicación. Un sensor de proximidad debe operar
de un 50 a un 80% de su rango a fin de evitar condiciones extremas que den lugar a falsas detecciones.
El rango real de detección es el rango real +-10%. Para determinar el rango se establece la siguiente prueba: Tomando un objeto de acero dulce de frente plano y
tamaño equivalente o superior a la cara activa del sensor.
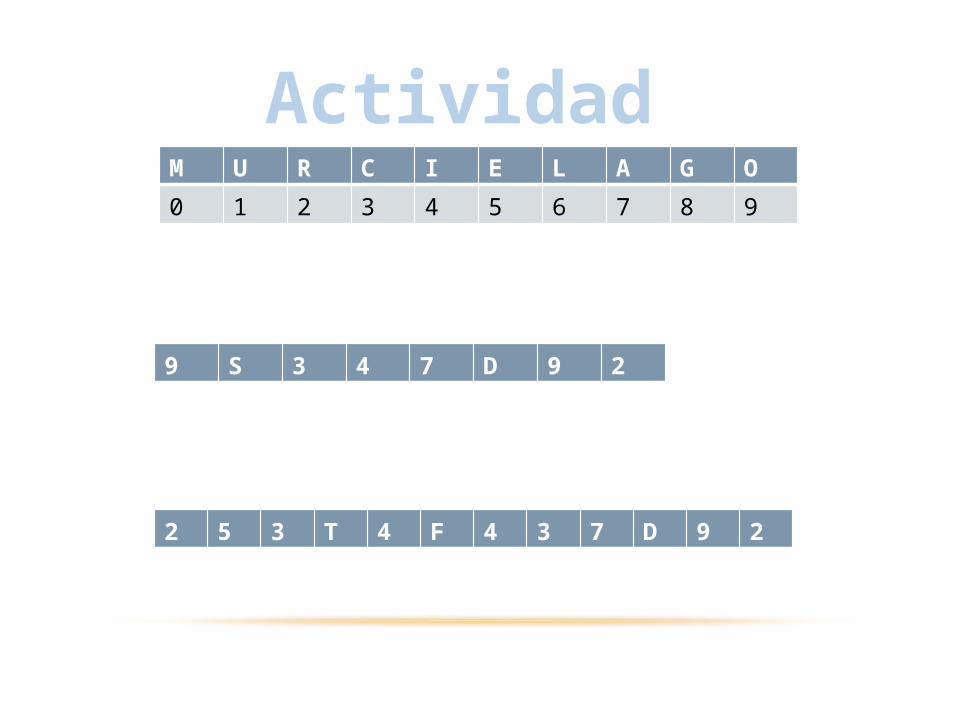
Actividad
_ _ _ _ _ _ _ _ _ _ _ _
M U R C I E L A G O
0 1 2 3 4 5 6 7 8 9
9 S 3 4 7 D 9 2
2 5 3 T 4 F 4 3 7 D 9 2