
Soluciones de Problemas de Control...
37
Soluciones de Problemas de ControlAutom´atico 3 er Curso de Ingenier´ ıa Industrial Departamento de Ingenier´ ıa de Sistemas y Autom´atica Universidad de Sevilla Teodoro ´ Alamo Federico Cuesta DanielLim´on Francisco Salas Carlos Vivas Manuel Ruiz Arahal
Transcript of Soluciones de Problemas de Control...

Soluciones de Problemas de Control Automatico
3er Curso de Ingenierıa Industrial
Departamento de Ingenierıa de Sistemas y Automatica
Universidad de Sevilla
Teodoro Alamo
Federico Cuesta
Daniel Limon
Francisco Salas
Carlos Vivas
Manuel Ruiz Arahal

Depto. Ing. de Sistemas y Automatica. ESI. US. ii
Parte I
Automatismos
1

Control Automatico, 3o Ing. Industrial. 3
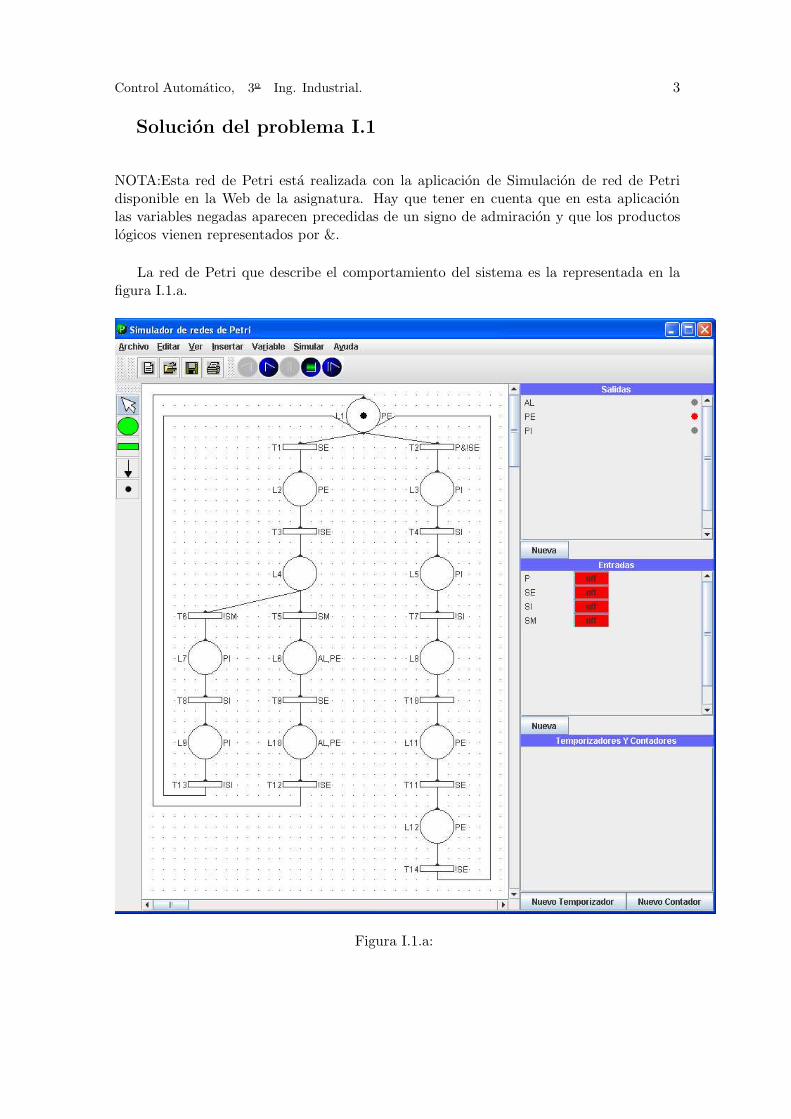
Solucion del problema I.1
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion y que los productoslogicos vienen representados por &.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.1.a.
Figura I.1.a:

Depto. Ing. de Sistemas y Automatica. ESI. US. 4
Solucion del problema I.2
La matriz de fases del automatismo que gobierna el funcionamiento del toldo es la siguiente
P SS SB 000 001 011 010 110 111 101 100 MOTOR
0 - - X 0© 1 X - - MP
1 - - X - 0© X - 2 MB
2 3 - X - - X 4 2© MB
3 3© 5 X - - X - 6 MB
4 - 5 X - - X 4© - MP
5 - 5© X - - X 7 - MP
6 8 - X - - X - 6© MP
7 - - X - - X 7© 9 MS
8 8© - X - - X - 9 MP
9 10 - X - 11 X - 9© MS
10 10© - X 0 - X - 12 MS
11 - - X 0 11© X - - MP
12 13 - X - - X - 12© MP
13 13© - X - - X - 2 MP
Definicion de los estados:
• 0: Estado inicial toldo subido, pulsador sin pulsar y motor parado.
• 1: Toldo subido (sensor SS activado) empezando a bajar, pulsador P pulsado ymotor bajando.
• 2: Toldo en posicion intermedia, pulsador P pulsado y motor bajando.
• 3: Toldo en posicion intermedia, pulsador P sin pulsar y motor bajando.
• 4: Toldo en posicion inferior, pulsador P pulsado y motor parado, (el toldo hallegado abajo sin que el pulsador se haya soltado, por lo tanto hay que soltar P yvolverlo a pulsar para que el toldo se vuelva a poner en marcha).
• 5: Toldo en posicion inferior, pulsador P sin pulsar y motor parado.
• 6: Toldo en posicion intermedia, pulsador P pulsado y motor parado, antes bajando.
• 7: Toldo en posicion inferior empezando a subir, pulsador P pulsado y motor subi-endo.
• 8: Toldo en posicion intermedia, pulsador P sin pulsar y motor parado, antes ba-jando.
• 9: Toldo en posicion intermedia, pulsador P pulsado y motor subiendo.
• 10: Toldo en posicion intermedia, pulsador P sin pulsar y motor subiendo.
Control Automatico, 3o Ing. Industrial. 5
• 11: Toldo en posicion superior, pulsador P pulsado y motor parado, (el toldo hallegado arriba sin que el pulsador se haya soltado, por lo tanto hay que soltar P yvolverlo a pulsar para que el toldo se vuelva a poner en marcha).
• 12: Toldo en posicion intermedia, pulsador P pulsado y motor parado, antes subi-endo.
• 13: Toldo en posicion intermedia, pulsador P sin pulsar y motor parado, antesbajando.
Notas:
• Supongo que el toldo esta inicialmente arriba
• se supone que el movimiento del toldo es instantaneo, es decir no da tiempo a soltarel boton P antes de que el toldo abandone la posicion superior.

Depto. Ing. de Sistemas y Automatica. ESI. US. 6
Solucion del problema I.3
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por —.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.3.a.
Figura I.3.a:

Control Automatico, 3o Ing. Industrial. 7
Solucion del problema I.4
La matriz de fases del automatismo que gobierna el funcionamiento del ventanilla es lasiguiente
P VS VB 000 001 011 010 110 111 101 100 MOTOR
0 - - X 0© 1 X - - MP
1 - - X - 0© X - 2 MB
2 3 - X - - X 4 2© MB
3 3© - X - - X - 5 MP
4 - 6 X - - X 4© - MP
5 7 - X - 8 X - 5© MS
6 - 6© X - - X 9 - MP
7 7© - X - - X - 2 MP
8 - - X 0 8© X - - MS
9 - - X - - X 9© 5 MS
Definicion de los estados:
• 0: Estado inicial ventanilla subida, pulsador sin pulsar y motor parado.
• 1: Ventanilla subida (sensor VS activado) empezando a bajar, pulsador P pulsadoy motor bajando.
• 2: Ventanilla en posicion intermedia, pulsador P pulsado y motor bajando.
• 3: Ventanilla en posicion intermedia, pulsador P sin pulsar y motor parado, antesbajando.
• 4: Ventanilla en posicion inferior, pulsador P pulsado y motor parado, (la ventanillaha llegado abajo sin que el pulsador se haya soltado, por lo tanto hay que soltar P
y volverlo a pulsar para que la ventanilla se vuelva a poner en marcha).
• 5: Ventanilla en posicion intermedia, pulsador P pulsado y motor subiendo.
• 6: Ventanilla en posicion inferior, pulsador P sin pulsar y motor parado.
• 7: Ventanilla en posicion intermedia, pulsador P sin pulsar y motor parado, antessubiendo.
• 8: Ventanilla en posicion superior, pulsador P pulsado y motor parado, (la ventanillaha llegado arriba sin que el pulsador se haya soltado, por lo tanto hay que soltar P
y volverlo a pulsar para que la ventanilla se vuelva a poner en marcha).
• 9: Ventanilla en posicion inferior empezando a subir, pulsador P pulsado y motorsubiendo.

Depto. Ing. de Sistemas y Automatica. ESI. US. 8
Notas:
• Supongo que la ventanilla esta inicialmente arriba
• se supone que el movimiento de la ventanilla es instantaneo, es decir no da tiempoa soltar el boton P antes de que la ventanilla abandone la posicion superior.
Control Automatico, 3o Ing. Industrial. 9
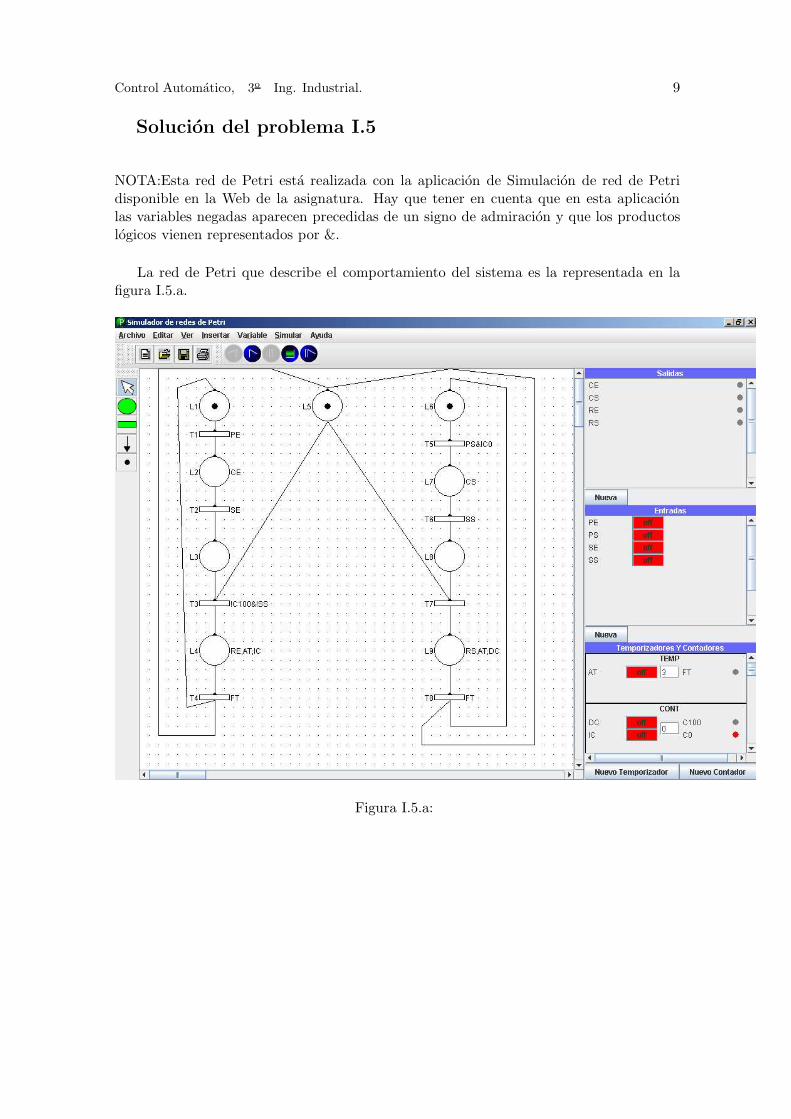
Solucion del problema I.5
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion y que los productoslogicos vienen representados por &.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.5.a.
Figura I.5.a:
Depto. Ing. de Sistemas y Automatica. ESI. US. 10
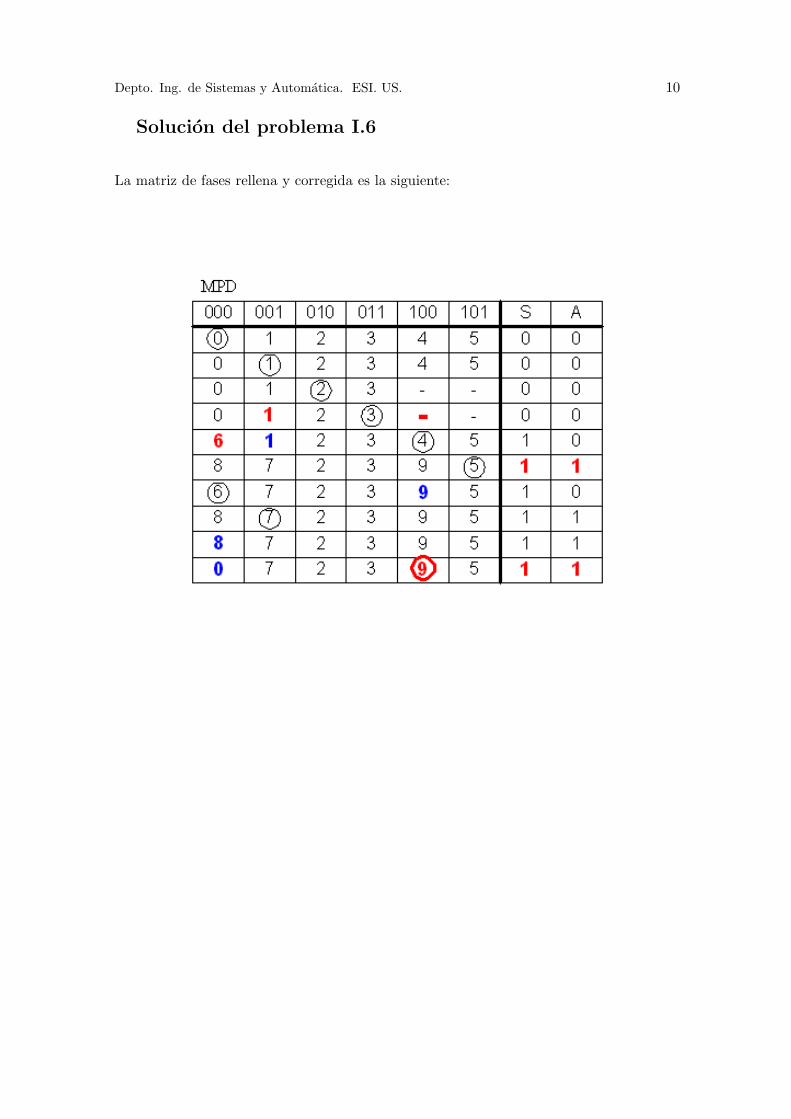
Solucion del problema I.6
La matriz de fases rellena y corregida es la siguiente:
Control Automatico, 3o Ing. Industrial. 11
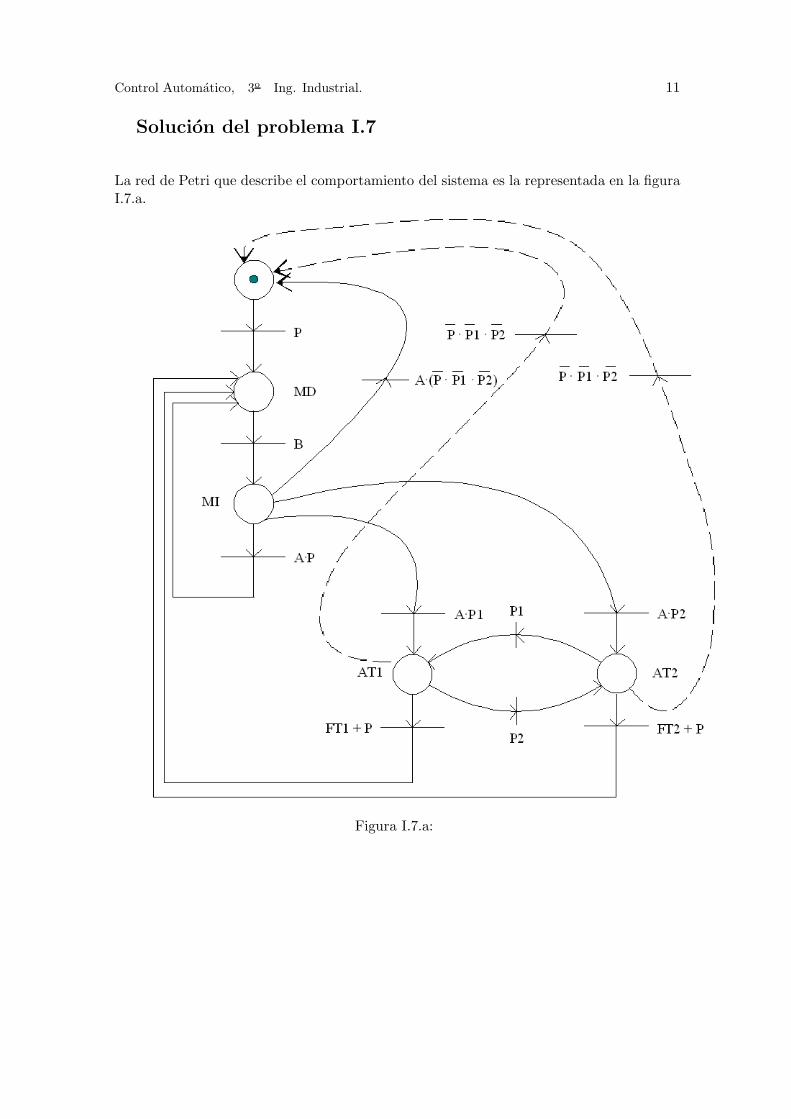
Solucion del problema I.7
La red de Petri que describe el comportamiento del sistema es la representada en la figuraI.7.a.
Figura I.7.a:

Depto. Ing. de Sistemas y Automatica. ESI. US. 12
Solucion del problema I.8
Las redes de Petri que describen el comportamiento del sistema son las representadas enlas figuras I.8.a, I.8.b y I.8.c.
Figura I.8.a: Red de Petri del problema I.8.a
Control Automatico, 3o Ing. Industrial. 13
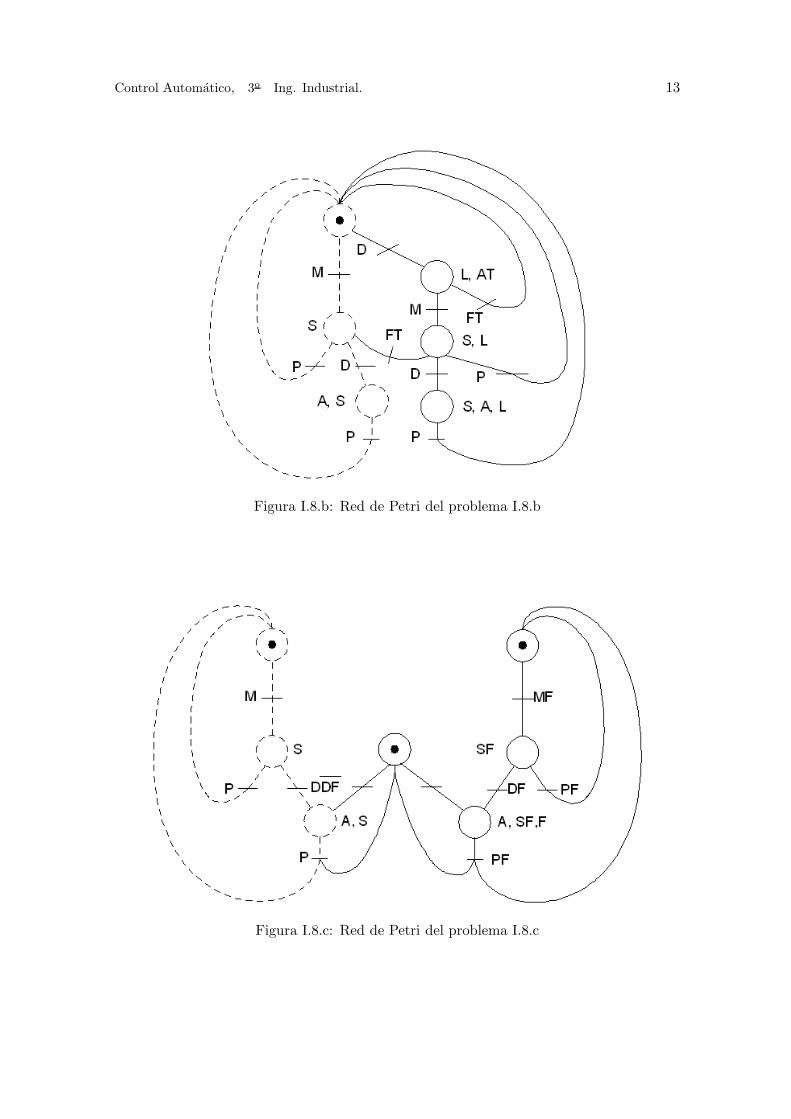
Figura I.8.b: Red de Petri del problema I.8.b
Figura I.8.c: Red de Petri del problema I.8.c

Depto. Ing. de Sistemas y Automatica. ESI. US. 14
Solucion del problema I.10
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.10.a.
Figura I.10.a:

Control Automatico, 3o Ing. Industrial. 15
Solucion del problema I.11
En primer lugar hay que hacer la matriz de fases que describe el funcionamiento delsistema:
S1 S2 00 01 11 10 FCV
0 0© X - 1 1
1 1 X 2 1© 1
2 - X 2© 3 0
3 0 X 2 3© 0
Definicion de los estados:
• 0: Estado inicial deposito vacıo (Nivel por debajo de S1).
• 1: Nivel por encima de S1 y por debajo de S2, subiendo.
• 2: Nivel por encima de S2.
• 3: Nivel por encima de S1 y por debajo de S2, bajando.
Para minimizar el numero de estados hay que hacer la matriz de inferencias:
1 -
2 X X
3 X X -
0 1 2
De la que se pueden obtener los estados 0-compatibles, que son (0-1) y (2-3).
A continuacion se agrupan estados n-compatibles entre sı para minimizar el numerode estados y obtenemos que los grupos son:
(0 − 1) → a
(2 − 3) → b
Una vez minimizado el numero de estado obtenemos la matriz de fases reducida como:

Depto. Ing. de Sistemas y Automatica. ESI. US. 16
S1 S2 00 01 11 10 FCV
a a© X b a© 1
b a X b© b© 0
Codificacion de estados: Asignamos un numero binario a cada estado estable de lamatriz de fases reducida, como hay 2 estados necesitaremos 1 bit para codificar el numerobinario:
a → 0
b → 1
Con esta calificacion la matriz de transicion de estados queda
S1 S2 00 01 11 10
0 0 - 1 0
1 0 - 1 1
Para realizar la simplificacion usamos la basada en tablas de Karnaught:
S1 S2 00 01 11 10
0 0 - 1 0
1 0 - 1 1
��
��
��
�
Con lo que atendiendo a dicha tabla la codificacion de al funcion de transicion corre-spondiente al estado q queda
q = S2 + Q·S1
Funcion de Salida (lectura) del sistema.
Esta funcion se calcula como la relacion de la salida del sistema con los estadosobtenidos en la funcion de transicion

Control Automatico, 3o Ing. Industrial. 17
FCV = Q
Con lo que atendiendo a la funcion de transicion y de lectura el diagrama de contactosqueda:
S2
S1 Q
q
Q FCV
Figura I.11.a:
Depto. Ing. de Sistemas y Automatica. ESI. US. 18
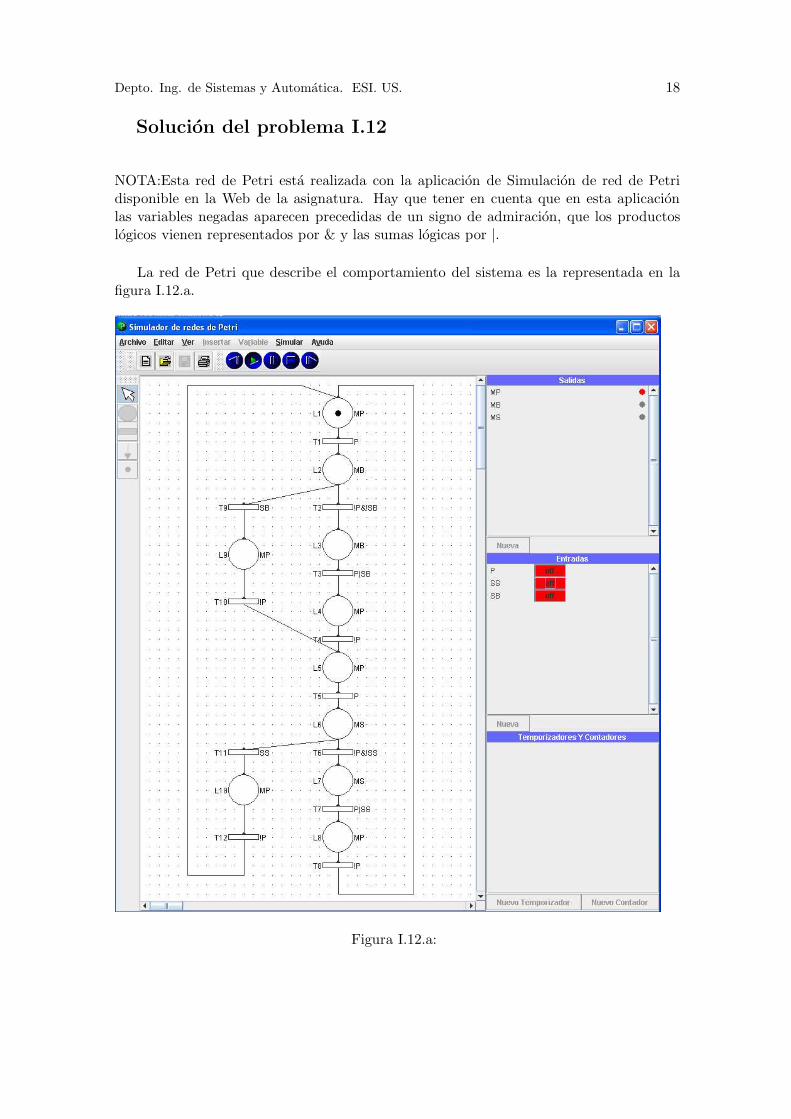
Solucion del problema I.12
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.12.a.
Figura I.12.a:
Control Automatico, 3o Ing. Industrial. 19
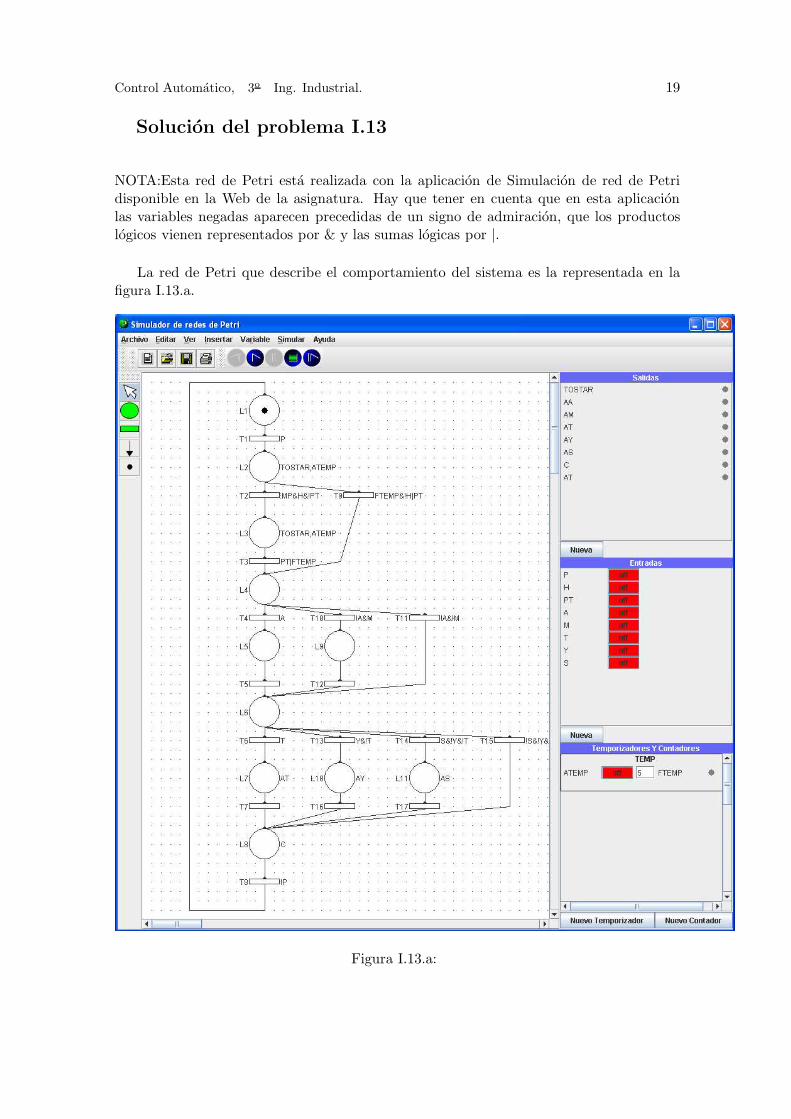
Solucion del problema I.13
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.13.a.
Figura I.13.a:

Depto. Ing. de Sistemas y Automatica. ESI. US. 20
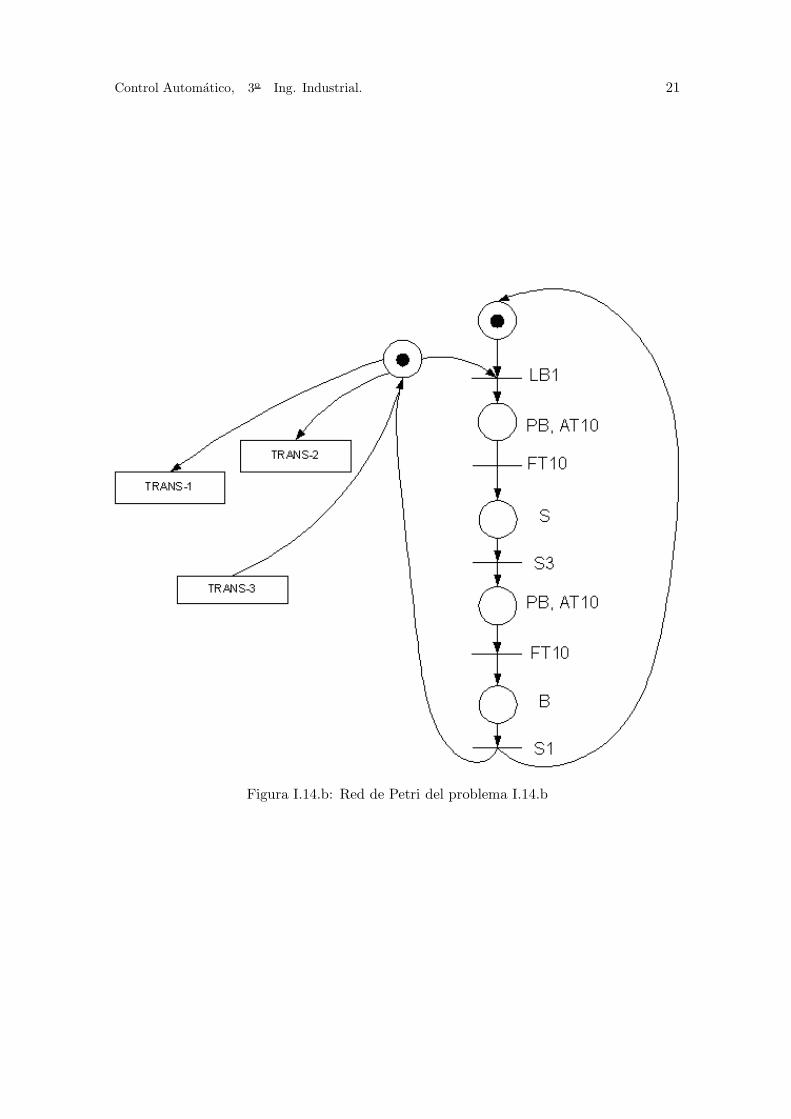
Solucion del problema I.14
Las redes de Petri que describen el comportamiento del sistema son las representadas enlas figuras I.14.a y I.14.b.
Figura I.14.a: Red de Petri del problema I.14.a
Control Automatico, 3o Ing. Industrial. 21
Figura I.14.b: Red de Petri del problema I.14.b
Depto. Ing. de Sistemas y Automatica. ESI. US. 22
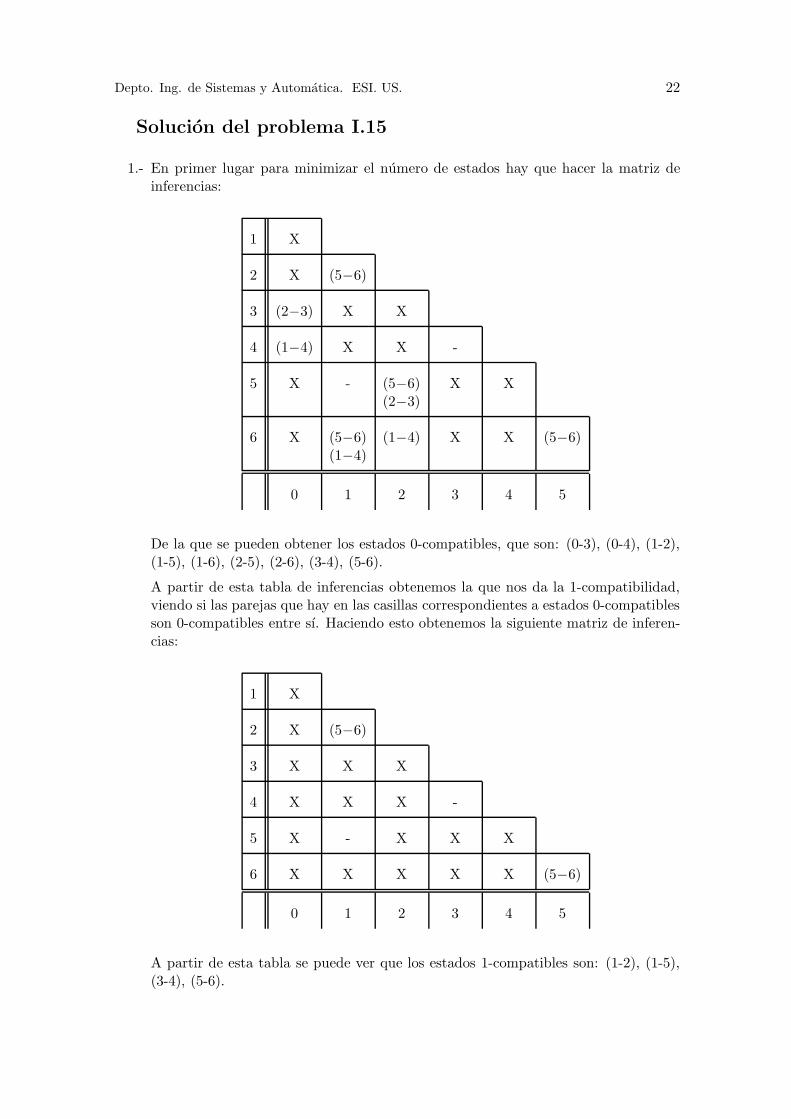
Solucion del problema I.15
1.- En primer lugar para minimizar el numero de estados hay que hacer la matriz deinferencias:
1 X
2 X (5−6)
3 (2−3) X X
4 (1−4) X X -
5 X - (5−6)(2−3)
X X
6 X (5−6)(1−4)
(1−4) X X (5−6)
0 1 2 3 4 5
De la que se pueden obtener los estados 0-compatibles, que son: (0-3), (0-4), (1-2),(1-5), (1-6), (2-5), (2-6), (3-4), (5-6).
A partir de esta tabla de inferencias obtenemos la que nos da la 1-compatibilidad,viendo si las parejas que hay en las casillas correspondientes a estados 0-compatiblesson 0-compatibles entre sı. Haciendo esto obtenemos la siguiente matriz de inferen-cias:
1 X
2 X (5−6)
3 X X X
4 X X X -
5 X - X X X
6 X X X X X (5−6)
0 1 2 3 4 5
A partir de esta tabla se puede ver que los estados 1-compatibles son: (1-2), (1-5),(3-4), (5-6).

Control Automatico, 3o Ing. Industrial. 23
Es facil ver que si repetimos el proceso para hallar los estados 2-compatibles serepite el mismo conjunto de estados, por lo que podemos asegurar que los estados1-compatibles seran tambien estado n-compatibles.
A continuacion se agrupan estados n-compatibles entre sı para minimizar el numerode estados y obtenemos que los grupos son:
0 → a
(1 − 2) → b
(3 − 4) → c
(5 − 6) → d
Una vez minimizado el numero de estado obtenemos la matriz de fases reducidacomo:
00 01 11 10 S
a a© b X b V
b d b© X b© R
c a c© X c© V
d d© c X c R
Con esto ya habrıamos contestado la primera pregunta ya que piden el numeromınimo de estados, y esto es la matriz de fases, de todas formas vamos a continuar ya realizar la codificacion de estados y la simplificacion usando tablas de Karnaughtpara obtener la funcion de transicion.
Codificacion de estados: Asignamos un numero binario a cada estado estable de lamatriz de fases reducida, como hay 4 estados necesitaremos 2 bits para codificar elnumero binario:
a → 00
b → 01
c → 11
d → 10
Con esta calificacion la matriz de transicion de estados queda
00 01 11 10
00 00 01 X 01
10 10 01 X 01
11 00 11 X 11
10 10 11 X 11
Para realizar la simplificacion separamos en dos tablas el primer y segundo bit. Ladel primer bit que llamaremos q1 es:

Depto. Ing. de Sistemas y Automatica. ESI. US. 24
00 01 11 10
00 0 0 0 0
10 1 0 0 0
11 0 1 0 1
10 1 1 0 1
�� �� ��
�
��
� �� ��
Con lo que atendiendo a dicha tabla la codificacion de al funcion de transicioncorrespondiente al estado q1 queda
q1 = ABQ1Q2 + AQ1Q2 + ABQ1 + ABQ1
Haciendo lo mismo para el segundo estado q2
00 01 11 10
00 0 1 0 1
10 0 1 0 1
11 0 1 0 1
10 0 1 0 1
�
�
�
�
�
�
Con lo que atendiendo a dicha tabla la codificacion de al funcion de transicioncorrespondiente al estado q2 queda
q2 = AB + AB
2.- Funcion de Salida (lectura) del sistema.
Esta funcion se calcula como la relacion de la salida del sistema con los estadosobtenidos en la funcion de transicion:
Tomando V = 0 y R = 1 la relacion es:
00 → 0
01 → 1
11 → 0
11 → 1
y por lo tanto la funcion de lectura es:
S = Q1Q2 + Q1Q2

Control Automatico, 3o Ing. Industrial. 25
Solucion del problema I.16
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.16.a.
Figura I.16.a:
Depto. Ing. de Sistemas y Automatica. ESI. US. 26
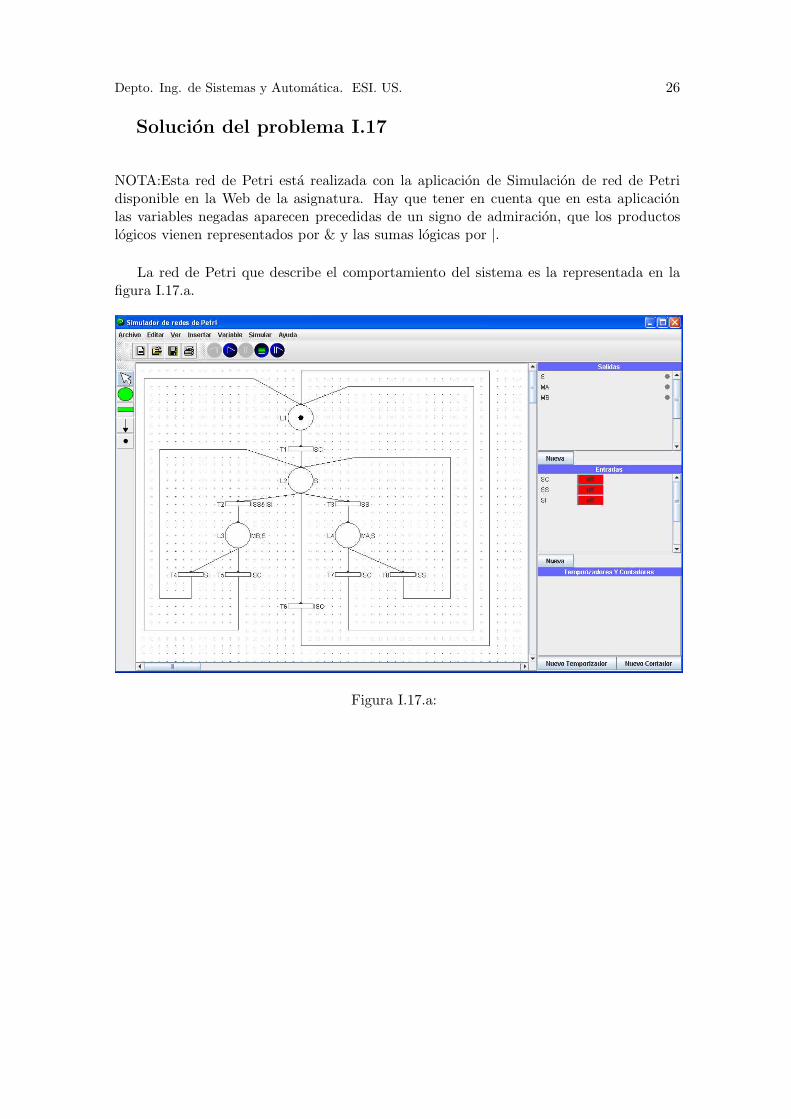
Solucion del problema I.17
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.17.a.
Figura I.17.a:
Control Automatico, 3o Ing. Industrial. 27
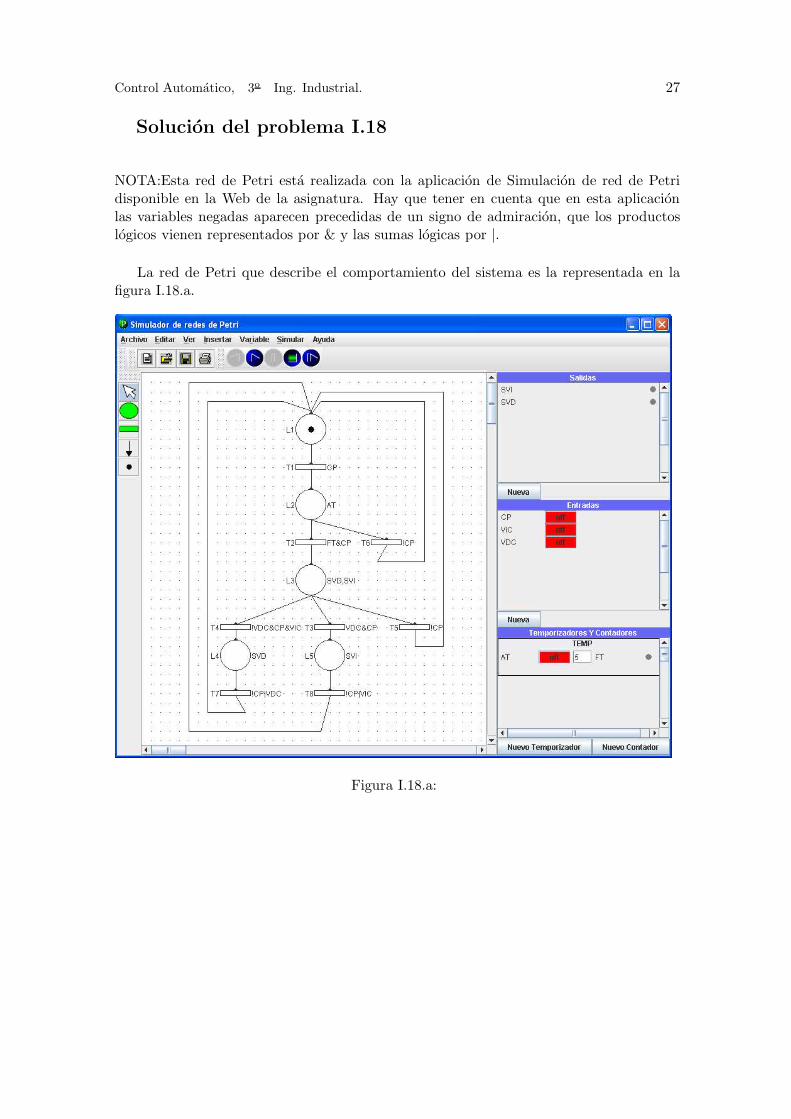
Solucion del problema I.18
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.18.a.
Figura I.18.a:

Depto. Ing. de Sistemas y Automatica. ESI. US. 28
Solucion del problema I.19
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.19.a.
Figura I.19.a:

Control Automatico, 3o Ing. Industrial. 29
Solucion del problema I.20
En primer lugar hay que hacer la matriz de fases que describe el funcionamiento delsistema:
T10 T20 00 01 11 10 AIRE
0 0© 1 X 2 0
1 3 1© X - 1
2 0 - X 2© 0
3 3© 1 X 2 1
Definicion de los estados:
• 0: Estado inicial, temperatura intermedia, AIRE=0 viene de temperatura menor de10.
• 1: Temperatura por encima de T20 , AIRE=1.
• 2: temperatura por debajo de T10.
• 3: Temperatura intermedia, viene de temperatura alta.
Para minimizar el numero de estados hay que hacer la matriz de inferencias:
1 X
2 - X
3 X - X
0 1 2
De la que se pueden obtener los estados 0-compatibles, que son (0-2) y (1-3).
A continuacion se agrupan estados n-compatibles entre sı para minimizar el numerode estados y obtenemos que los grupos son:
(0 − 2) → a
(1 − 3) → b

Depto. Ing. de Sistemas y Automatica. ESI. US. 30
Una vez minimizado el numero de estado obtenemos la matriz de fases reducida como:
T10 T20 00 01 11 10 FCV
a a© b X a© 0
b b© b© X a 1
Codificacion de estados: Asignamos un numero binario a cada estado estable de lamatriz de fases reducida, como hay 2 estados necesitaremos 1 bit para codificar el numerobinario:
a → 0
b → 1
Con esta calificacion la matriz de transicion de estados queda
T10 T20 00 01 11 10
0 0 1 X 0
1 1 1 X 0
Para realizar la simplificacion usamos la basada en tablas de Karnaught:
T10 T20 00 01 11 10
0 0 1 X 0
1 1 1 X 0
��
�
��
�
Con lo que atendiendo a dicha tabla la codificacion de al funcion de transicion corre-spondiente al estado q queda
q = T10T20 + QT10
Funcion de Salida (lectura) del sistema.
Control Automatico, 3o Ing. Industrial. 31
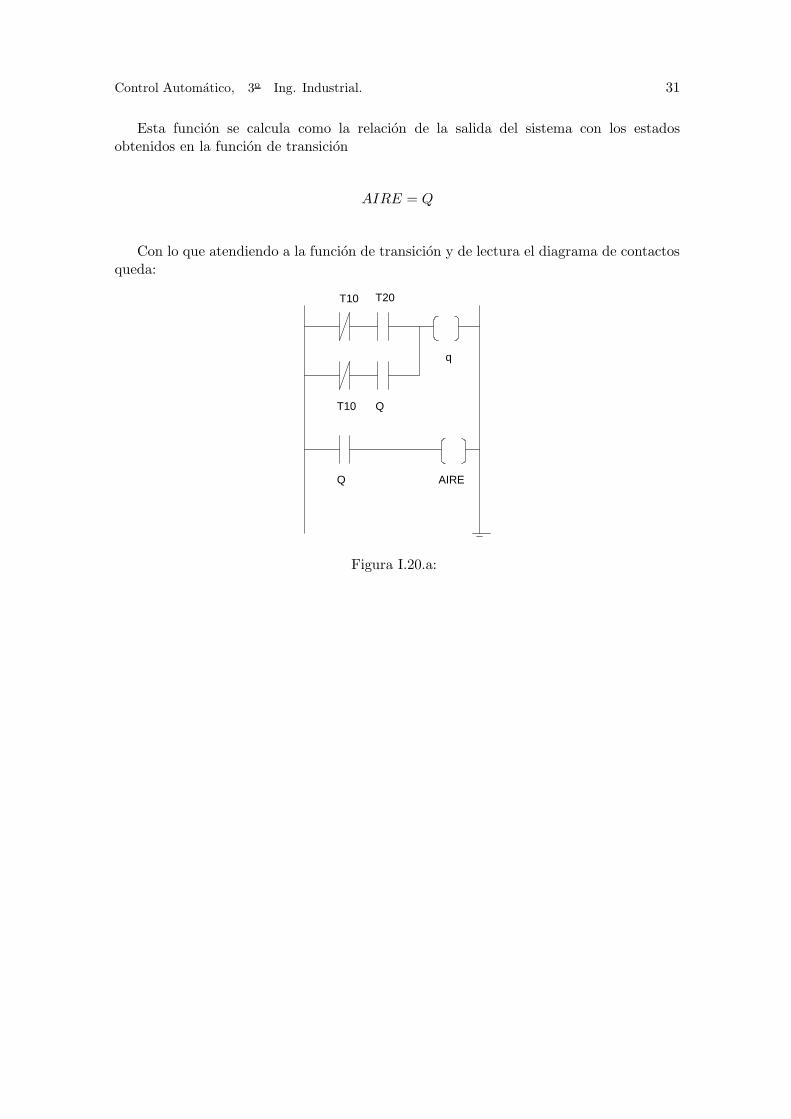
Esta funcion se calcula como la relacion de la salida del sistema con los estadosobtenidos en la funcion de transicion
AIRE = Q
Con lo que atendiendo a la funcion de transicion y de lectura el diagrama de contactosqueda:
T10
T10 Q
q
Q AIRE
T20
Figura I.20.a:

Depto. Ing. de Sistemas y Automatica. ESI. US. 32
Solucion del problema I.21
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.21.a.
Figura I.21.a:

Control Automatico, 3o Ing. Industrial. 33
Solucion del problema I.23
PM
CAR
FCAR
G120
FG120
(RTAL)CAR
(RRTAL)
G120
FG120
(RTAL)
(RRTAL)
(RAV)
(RRAV)
DESCAR
FDESCAR · PARPAR
G120
FG120
DESCAR
FDESCAR
G120
FG120
DESCAR
FDESCAR
Rutina de Taladrado(RTAL)
MT, BT
TB
FT1
MT, AT1
TA
MT, ST
FT1
AT1
(RRTAL)
(RAV)
MA, BA
AB
FT2
MA, AT2
AA
MA, SA
FT2
AT2
(RRAV)
Rutina de Avellanado
FCAR
CAR
FCAR
Figura I.23.a:

Depto. Ing. de Sistemas y Automatica. ESI. US. 34
Solucion del problema I.24
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.24.a.
Figura I.24.a:
Control Automatico, 3o Ing. Industrial. 35
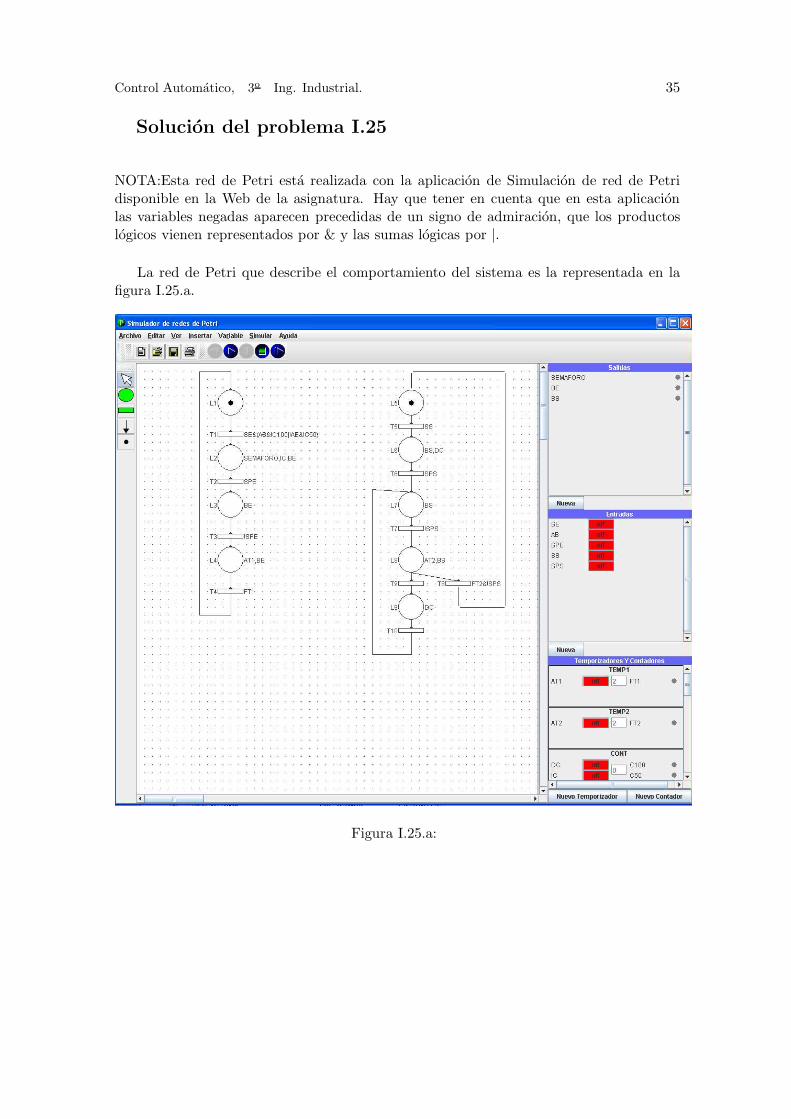
Solucion del problema I.25
NOTA:Esta red de Petri esta realizada con la aplicacion de Simulacion de red de Petridisponible en la Web de la asignatura. Hay que tener en cuenta que en esta aplicacionlas variables negadas aparecen precedidas de un signo de admiracion, que los productoslogicos vienen representados por & y las sumas logicas por |.
La red de Petri que describe el comportamiento del sistema es la representada en lafigura I.25.a.
Figura I.25.a:

















