Sistemas de Control Automatico
15
UNIVERSIDAD TECNOLOGICA DEL ESTADO DE ZACATECAS MECATRÓNICA MODELADO MATEMATICO ALUMOS: JESUS ANTONIO NAVA PINTOR JUAN PABLO REYES MEDINA MATERIA: SISTEMAS DE CONTROL AUTOMATICO PROFESOR: EFRAIN RAMIREZ CARDONA
-
Upload
toninava90 -
Category
Documents
-
view
228 -
download
0
description
Descripcion de un modelado matematico con una resitencia
Transcript of Sistemas de Control Automatico
UNIVERSIDAD TECNOLOGICA DEL ESTADO DE ZACATECAS
MECATRÓNICA
MODELADO MATEMATICO
ALUMOS:
JESUS ANTONIO NAVA PINTOR
JUAN PABLO REYES MEDINA
MATERIA:
SISTEMAS DE CONTROL AUTOMATICO
PROFESOR:
EFRAIN RAMIREZ CARDONA
Guadalupe, Zacatecas. Agosto 2015
Sistemas de Control Automatico
INTRODUCCION
En esta práctica se aplicaron los conocimientos obtenidos en la clase. Fue necesario obtener datos por medio de la NImyDAQ los cuales nos sirvieron para observar el comportamiento de nuestro sistema, y posteriormente se aplicaron los conocimientos obtenidos en la clase de control automático para obtener el modelado matemático del sistema y posteriormente desarrollar un control de temperatura.
PRACTICA
La práctica consiste en aplicar voltaje a una resistencia de 5W con bajo valor resistivo esto con el objetivo de que la temperatura en la resistencia se eleve, y medir con ayuda del sensor lm35 el valor de temperatura que este tiene para realizar el modelado matemático y posteriormente aplicar un control de temperatura.
MATERIAL
- 1 Resistencia de 5W de 4.5 ohm- 1 Resistencia de 10k- 1 Resistencia de 1k- Un Amplificador Operacional LM324- Un Sensor de Temperatura LM35- Una tarjeta de adquisición de datos NImyDAQ
Especificaciones Tecnicas
LM35
El sensor LM35 es un sensor de temperatura con una precisión calibrada de 1°C y un rango que abarca desde -55°C. La salida es lineal y equivale a 10mV/°C por lo tanto:
+1500mV = 150°C
+250mV = 25°C
-550mV = -55°C
El LM35 funciona en el rango de alimentación comprendido entre 4 y 30 voltios. Tiene una baja corriente de alimentación a 60uA. El LM35 no requiere de circuitos adicionales para calibrarlo externamente. La baja impedancia de salida, su salida lineal y su precisa calibración hace posible que esté integrado sea instalado fácilmente en un circuito de control.
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS2

Sistemas de Control Automatico
Amplificador operacional LM324
Está compuesto por cuatro amplificadores operacionales de alta ganancias diseñados para trabajar con fuente de alimentación simple. Sin embargo también son capaces de funcionar con una fuente de alimentación doble. Tiene ventajas sobre los amplificadores operacionales convencionales ya que puede trabajar con voltajes de alimentación desde 3 voltios hasta los 32 voltios. Es de bajo consumo de energía. Se puede utilizar para aplicaciones tales como: bloques de ganancia DC, amplificadores y en cualquier circuito típico con amplificadores operacionales. Por ejemplo el lm324 puede funcionar directamente con la tensión de 5 voltios de tensión, que es la que se utiliza en electrónica digital, sin necesidad de una fuente de alimentación doble de +/-15 V dc.
Función del Amplificador Operacional
Un amplificador operacional puede ser utilizado para determinar cuál de dos señales en sus entradas es mayor es decir como un comparador. Basta con que una de estas señales sea ligeramente mayor para que cause que la salida del amplificador operacional sea máxima, ya sea positiva. Esto se debe a que el operacional se utiliza en lazo abierto. La ganancia real de un amplificador operacional es de 200000 o más.
NImyDAQ
NImyDAQ es un dispositivo de adquisición de datos (DAQ) de bajo costo que brinda a los estudiantes la habilidad para medir y analizar señales en cualquier lado, a cualquier hora. NImyDAQ es compacto y portátil, así los estudiantes pueden extender el aprendizaje práctico fuera del entorno de laboratorio usando herramientas y métodos estándares en la industria. La plataforma incluye un motor de adquisición de datos que los estudiantes pueden usar para medir dos canales diferenciales de entrada analógica y salida analógica (200 kS/s, 16 bits, ±10 V). Las ocho líneas de entrada digital y salida digital (compatible con TTl de 3.3 V TTL) ayuda a los estudiantes a conectar TTL de bajo voltaje (LVTTL) y circuitos digitales TTL de 5 V. NI myDAQ suministra suficiente potencia para circuitos y sensores simples con salidas de suministro de potencia +5 V, +15 V y -15 V (hasta 500 mV de potencia). El DMM aislado de 60 V puede medir voltaje y corriente AC y DC, así como resistencia, voltaje de diodo y continuidad.
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS3
Sistemas de Control Automatico
Desarrollo
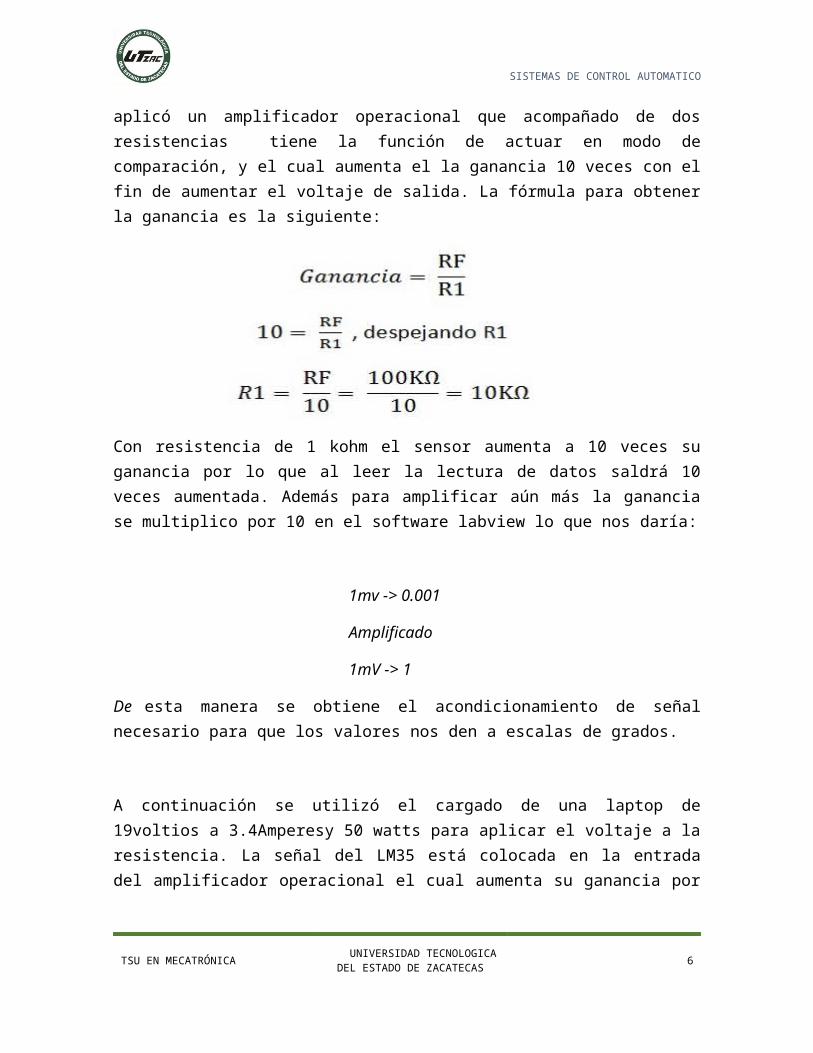
Para desarrollar un control de temperatura primero tenemos que conocer el comportamiento de la planta a la que se le va a aplicar, en este caso la planta es una resistencia cerámica de 5W a 4.5 ohm ala que se le adapto el sensor lm35. Se midió por primera vez a 29 grados centígrados lo que es igual a 0.029 mili volts, para aumentar el voltaje de salida se aplicó un amplificador operacional que acompañado de dos resistencias tiene la función de actuar en modo de comparación, y el cual aumenta el la ganancia 10 veces con el fin de aumentar el voltaje de salida. La fórmula para obtener la ganancia es la siguiente:
Con resistencia de 1 kohm el sensor aumenta a 10 veces su ganancia por lo que al leer la lectura de datos saldrá 10 veces aumentada. Además para amplificar aún más la ganancia se multiplico por 10 en el software labview lo que nos daría:
1mv -> 0.001
Amplificado
1mV -> 1
De esta manera se obtiene el acondicionamiento de señal necesario para que los valores nos den a escalas de grados.
A continuación se utilizó el cargado de una laptop de 19voltios a 3.4Amperesy 50 watts para aplicar el voltaje a la resistencia. La señal del LM35 está colocada en la entrada del
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS4
Sistemas de Control Automatico
amplificador operacional el cual aumenta su ganancia por 10. Posteriormente de la salida del amplificador operacional el cual se conectó ala NImyDAQ.
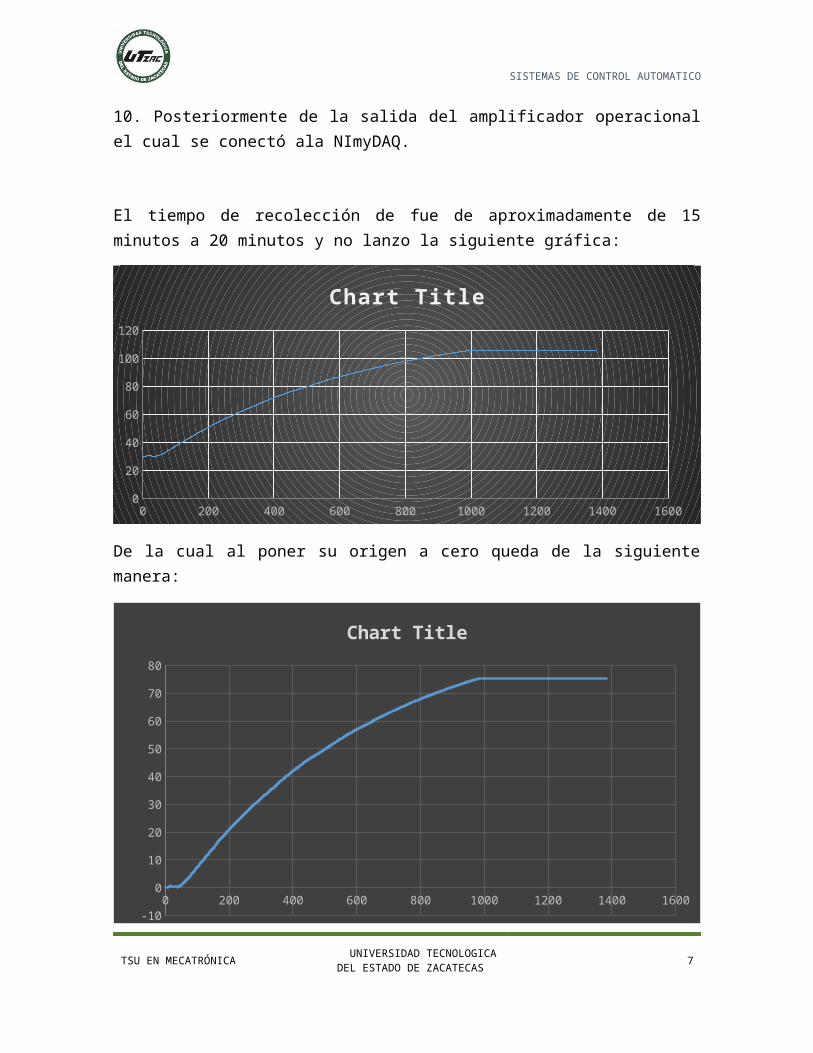
El tiempo de recolección de fue de aproximadamente de 15 minutos a 20 minutos y no lanzo la siguiente gráfica:
0 200 400 600 800 1000 1200 1400 16000
20
40
60
80
100
120
Chart Title
De la cual al poner su origen a cero queda de la siguiente manera:
0 200 400 600 800 1000 1200 1400 1600-10
0
10
20
30
40
50
60
70
80
Chart Title
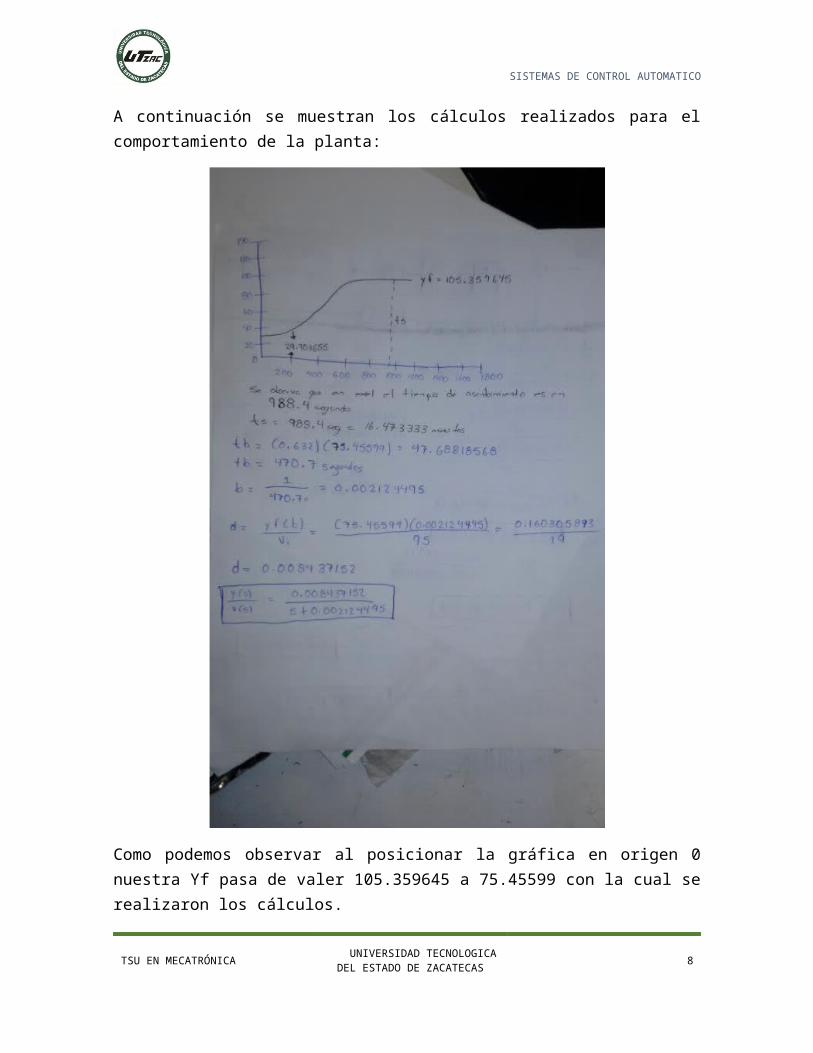
A continuación se muestran los cálculos realizados para el comportamiento de la planta:
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS5
Sistemas de Control Automatico
Como podemos observar al posicionar la gráfica en origen 0 nuestra Yf pasa de valer 105.359645 a 75.45599 con la cual se realizaron los cálculos.
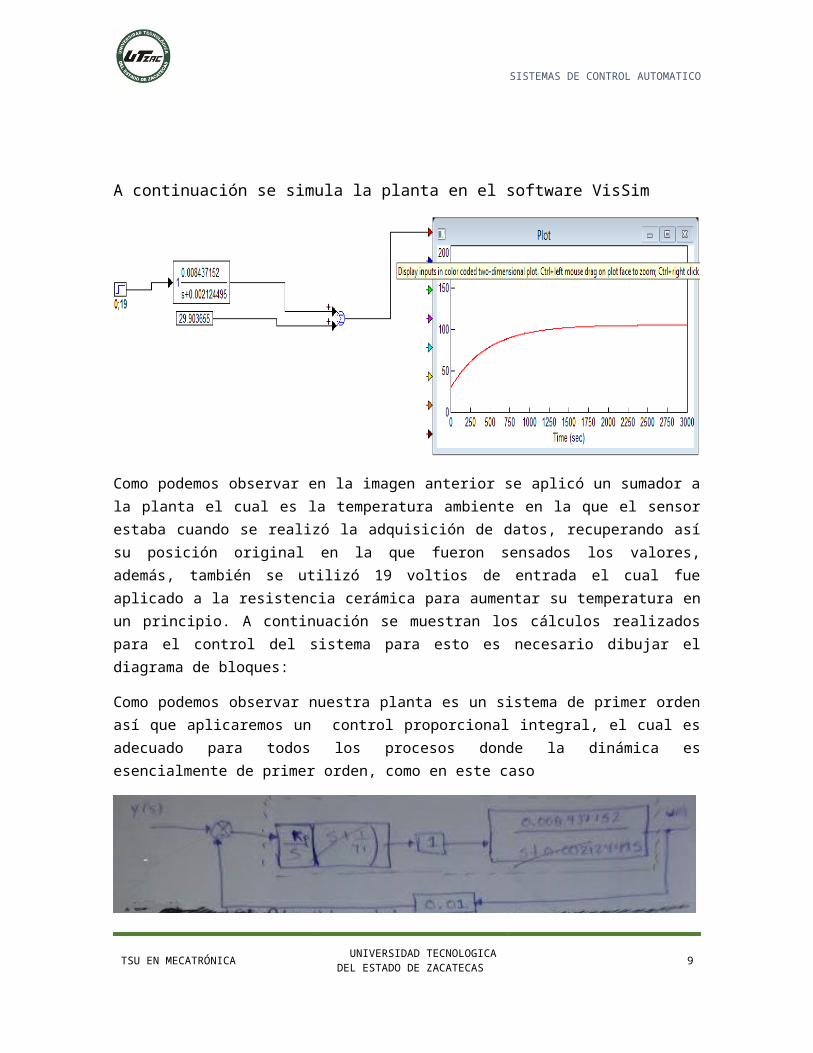
A continuación se simula la planta en el software VisSim
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS6
Sistemas de Control Automatico
Como podemos observar en la imagen anterior se aplicó un sumador a la planta el cual es la temperatura ambiente en la que el sensor estaba cuando se realizó la adquisición de datos, recuperando así su posición original en la que fueron sensados los valores, además, también se utilizó 19 voltios de entrada el cual fue aplicado a la resistencia cerámica para aumentar su temperatura en un principio. A continuación se muestran los cálculos realizados para el control del sistema para esto es necesario dibujar el diagrama de bloques:
Como podemos observar nuestra planta es un sistema de primer orden así que aplicaremos un control proporcional integral, el cual es adecuado para todos los procesos donde la dinámica es esencialmente de primer orden, como en este caso
En el diagrama de bloques dibujado podemos observar que se realizó la cancelación de polos además también tiene una retroalimentación que representa el sensor lm35 el cual definimos anteriormente entrega 10 milivolts por cada grado centígrado.
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS7
Sistemas de Control Automatico
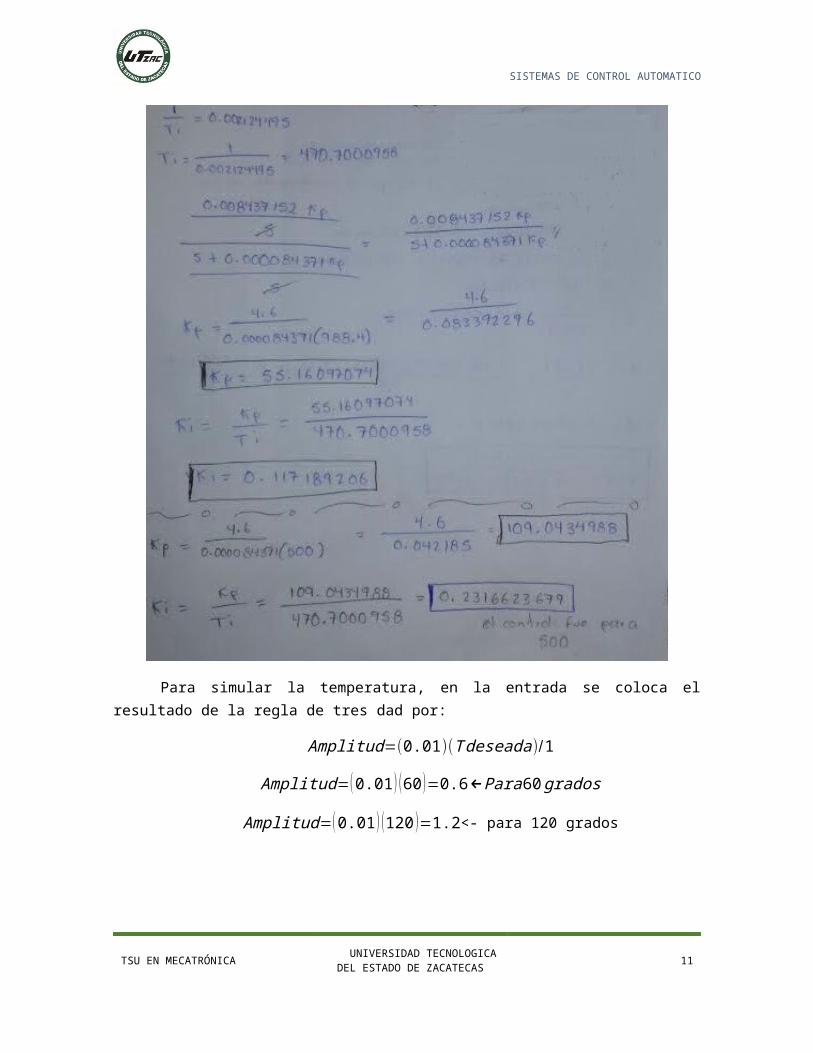
A continuación se llevaron a cabo dos cálculos de control de temperatura, el primero fue para un tiempo de 988.4 segundos y temperatura de 60 grados y el segundo para un tiempo de 500 y temperatura de 120 grados celcius:
Para simular la temperatura, en la entrada se coloca el resultado de la regla de tres dad por:
Amplitud=(0.01)(T deseada)/1
Amplitud= (0.01 ) (60 )=0.6←Para60 grados
Amplitud= (0.01 ) (120 )=1.2<- para 120 grados
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS8
Sistemas de Control Automatico
A continuación simulamos los resultados obtenidos en VisSim y comprobar que el sistema de control funciona correctamente:
Simulación para 60 grados Celsius en un tiempo de asentamiento de 988.4:
Amplificando observamos que el valor de asentamiento llego al 99% del valor totoal que en este caso seria 60 grados, como se observa en la siguiente imagen:
Observamos que la línea azul es el valor original de la planta y la línea roja es el valor de todo el sistema con su control proporcional integral.
Simulación para 120 grados Celsius en un tiempo de asentamiento de 500 segundos:
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS9
Sistemas de Control Automatico
Observamos que a la entrada colocamos de ganancia 1.2 calculado anteriormente para 120 grados Celsius. En este cálculo kp y ki cambiaron, es la ventaja de este control proporcional integral que estos valores son ganancias ajustables que permiten que el control sea de alta precisión. Amplificando observamos que el valor en el tiempo de asentamiento establecido llega al 99% de la temperatura deseada que en este caso es de 120 grados Celsius como se muestra a continuación:
Observamos que la línea azul es el valor original de la planta y la línea roja se encuentra aproximadamente en 120 grados Celsius en un tiempo de asentamiento de 500 segundos, comprobando así el funcionamiento de nuestro control proporcional integral.
Conclusiones
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS10
Sistemas de Control Automatico
De esta práctica se aclararon muchas dudas acerca de cómo un sistema de control automático opera realmente, hay decir que en el desarrollo de la práctica se tuvieron varios problemas tanto en calculo como a la hora de medir los datos, y como el sistema funcionaria. Sin embargo con los avances realizados en la práctica fuimos desechando dudas con ayuda del docente de la materia hasta que quedo completamente claro de lo que se estaba haciendo desde un principio. Sobra decir que los sistemas de control automático son muy útiles y sin duda los usaremos para próximos proyectos dentro de la institución o ¿porque no?, quizás algún día, en nuestro futuro laboral.
TSU EN MECATRÓNICA UNIVERSIDAD TECNOLOGICA
DEL ESTADO DE ZACATECAS11