Repaso de Econometría I
17
Click here to load reader
-
Upload
guilvert-f-carrizales-huamalies -
Category
Documents
-
view
699 -
download
1
Transcript of Repaso de Econometría I

UNIVERSIDAD NACIONAL DE INGENIERÍ A ESCUELA PROFESIONAL DE INGENIERIA ECONÓM ICA
SEMESTRE 2010 - I Curso : Econometría II Profesor : Rudy Laguna Asesor : Fernando Jáuregui Este modelo establece una relación lineal entre un conjunto de k-1 variables explicativas (o exógenas) y una variable a explicar (endógena). Consideremos:
Y1 = β1 + β2X12 + β3X13 + ... + βkX1k + u1 Y2 = β1 + β2X22 + β3X23 + ... + βkX2k + u2
M M Yn = β1 + β2Xn2 + β3Xn3 + ... + βkXnk + un
En forma matricial: Y(nx1) = X(nxk)β(kx1) + u(nx1) SUPUESTOS DEL MODELO
1. El modelo es lineal en los parámetros 2. Las variables explicativas son linealmente independientes (Rango(X) = 0) 3. La regresión cumple con: E(u) =0 y Cov(x,u) = 0 4. Perturbaciones Esféricas: Var(u) = σ2
u y Cov(ut , ut-1) = 0 ⇒ E(uut) = Var(u) = σ2uI
5. Las variables explicativas son fijas o determinísticas (no aleatorias) 6. Normalidad: u ∼ N(0 , σ2
uI) 7. Los parámetros son constantes entre observaciones 8. Causalidad Unidireccional
ESTIMADOR DE MINIMOS CUADRADOS ORDINARIOS (MCO)
El estimador de los coeficientes se determina por: YX)XX(ˆ t1tMCO
−=β
Además: ββ =)ˆ(E y 1t2u )XX()ˆ(Var −= σβ
En ocasiones nos encontramos con estimadores que son sesgados pero de menor varianza que un estimador insesgado; para estos casos definimos el Error Cuadrático Medio (ECM):
22 )]ˆ(Sesgo[)ˆ(Var])ˆ[(E)ˆ(ECM βββββ +=−= Para las estimaciones de σ2
u por MCO se encuentra que: )kn/(uu)kn/(SRˆ t2u −=−=σ
Y cumple con: 2u
2u )ˆ(E σσ = y )kn/(ˆ2)ˆ(Var 2
u2u −= σσ
Repaso de Econometría I: El modelo lineal General

Teorema de Gauss – Markov El estimador MCO es el estimador lineal óptimo en el sentido de que cualquier otro estimador lineal e insesgado tiene una matriz de covarianzas mayor que la del estimador MCO. Otros resultados referidos al estimador MCO i) k
t 0uX = ii) 0u t =∑ iii) MYMUu == iv) YXˆYYMuuMYYuuSR tttttt β−====
ESTIMACION POR MAXIMA VEROSIMILITUD (MV) El estimador de parámetros por Máxima Verosimilitud del modelo lineal coincide con el de MCO, esto es: YX)XX(ˆ t1t
MV−=β
Debido a esto su esperanza y su varianza son las mismas que en el caso de MCO. Por otro lado, la estimación por MV de σ2
u si difiere, se calcula que: n/uuˆ t2u =σ
Adicionalmente se demuestra que: n/)kn()ˆ(E 2u
2u σσ −= y que 24
u2u n/)kn(2)ˆ(Var σσ −=
MEDIDAS DE BONDAD DE AJUSTE La bondad de ajuste nos indica cuán bien explicado esta el comportamiento de la variable endógena por nuestro modelo. Coeficiente de Determinación (R 2) Mide el porcentaje del comportamiento de Y que es explicado por el modelo propuesto:
STSE
STSR
1R 2 =−=
Cuando existe término independiente se cumple que: ST = SE + SR
Se puede demostrar que:
−=−=−=
−==
2t
2tt2t
tttt
YnYYST
YnYXˆYnYYSE
YXˆYYuuSR
ββ
Con esto podemos construir: 2t
2tt
2t
2t2
YnYY
YnYXˆ
YnYY
YnYYSTSE
R−
−=−−== β
O también: 2t
ttt
2t
t2
YnYYYXˆYY
1YnYY
uu1
STSR
1R−
−−=−
−=−= β
El valor del R2 esta acotado entre 0 y 1 sólo si existe término independiente. Si no existe intercepto, el R2 puede ser negativo y no estará acotado por abajo. Debido a que el R2 mide la bondad de ajuste puede ser utilizado para comparar el grado explicativo de dos modelos. Coeficiente de Determinación Ajustado o Corregido ( 2R ) Una forma de elevar el R2 es introducir nuevas variables; pero esto tiene un costo, que viene dado por la pérdida de grados de libertad. Entonces la inclusión de nuevas variables tiene un beneficio y un costo. Por ello se usa generalmente el R2 Ajustado o Corregido:
)R1()kn()1n(
1R 22 −−−−=

Valor de la Función de Máxima Verosimilitud (L) Otro indicador que permite conocer la calidad del ajuste y la relevancia del modelo propuesto es el valor de la Función de Verosimilitud. Aquel modelo que tenga el valor más alto de dicho indicador será aquel que mejor describe el modelo. Entonces definimos:
)n/uu(Log)2(Log1)[2/n(L t++−= π
Criterio de Akaike (AIC) y Shwarz (SC) Son dos criterios adicionales que permiten escoger entre modelos alternativos, generalmente se utilizan para evaluar si una variable adicional añade poder predictivo al modelo. Como los criterios anteriores, estos también están definidos tomando en cuenta el valor de la SR (una medida del tamaño de error). Cuanto menor sea esta medida del error, menor serán los valores de los criterios y por lo tanto mayor la capacidad explicativa del modelo.
nk2
nL2
AIC +−= Y n
)2(KLognL2
SCπ+−=
Donde L es el valor de la Función de Verosimilitud Contraste de Normalidad Dado que algunas de las propiedades del estimador MCO dependen del supuesto de normalidad del término de error de l modelo, utilizaremos el criterio de Jarque-Bera (JB) para contrastar dicha hipótesis:
24
)3Kurtosis(6
)Asimetría(nJB
22
−+= ∼ χ2(2)
Donde si JB > χ2
(2) se rechaza la hipótesis nula de normalidad. PRUEBAS DE HIPÓTESIS Las pruebas de hipótesis en el modelo lineal se basan en el supuesto de distribución normal del vector de residuos u ∼ Nn(0n , σ2
uI), lo que a su vez implica que el vector de estimaciones se distribuya como β ∼ Nk(β , σ2
u(XtX)-1).
Además, por propiedad, los estimadores MCO de β y σ2
u son independientes entre sí.
Para probar: H0 : β = β0 H1 : β ≠ β0 Se utiliza el estadístico F derivado de las distribuciones anteriores. Esto es:
[ ]k
)ˆ()XX(ˆ)ˆ(Fc
11t2u
t ββσββ −−=
−−
∼ F(k, n – k)
Si Fc > F , se rechaza H0, de lo contrario se acepta

Pruebas específicas de inferencia Si consideramos un conjunto de q restricciones lineales genéricas H0 : R(qxk)β(kx1) = r(qx1) Y adicionalmente consideramos que q ≤ k, Rango(R) = r, formamos nuestro indicador F como:
[ ]q
)rˆR(R)XX(Rˆ)rˆR(Fc
1t1t2u
t −−=
−− βσβ ∼ F(q, n – k)
a) Contraste de hipótesis acerca de un coeficiente del modelo
Consideremos H0 : βi = β0
i Además, dado que β ∼ Nk(β, σ2
u(XtX)-1), entonces β i ∼ Nk(βi, σ2
uaii). Con esto:
ii2u
20ii
aˆ
)ˆ(Fc
σββ −
= ∼ F(1, n- k) ó también: ii
2u
0ii
aˆ
ˆFc
σββ −
= ∼ t(n – k)
b) Contraste de hipótesis acerca de todos los coefi cientes del modelo distintos del
intercepto
Se considera H0 : β2 = β02
El vector β02 es de dimensión (k-1), la forma de la matriz R será R = [0k-1 Ik-1], además
r = β02 y X = [In X2]. Luego de aplicar propiedades de matrices particionadas llegamos a:
)kn/(uu
)1k/()ˆ)(QXX()ˆ(Fc
t
02
022
t2
t02
02
−−−−
=ββββ ∼ F(k – 1, n – k)
Donde Q = In – (1/n)1n1
tn
c) Contraste de significancia global del modelo
En este caso la hipótesis que se contrasta es la significancia conjunta de los coeficientes β, es decir H0 : β2 = 0k-1 El estadístico propuesto es:
)kn/(uu
)1k/(ˆ)QXX(ˆFc
t22
t2
t2
−−
=ββ ∼ F(k –1 , n – k)
Alternativamente se puede utilizar: SE/(k-1) = R2 / (k-1) ∼ F(k – 1 , n – k) SR/(n-k) (1 – R2)/(n-k) Pero la significancia global mediante el valor del R2 sólo es justificado cuando el modelo incluya término independiente.
d) Contraste acerca de un subvector de s vectores ( 1 ≤≤≤≤ s ≤≤≤≤ k-1) Sin pérdida de generalidad consideremos la contrastación de las últimas s variables del modelo. Con esto tendremos R = [0s , k-s Is] y un vector r = 0s , y sea el contraste del conjunto de restricciones lineales Rβ = r.

La matriz particionada será X = [X1 X2], donde X1 es de dimensión nx(k-s) y X2 de nxs. Las columnas de X2 son las observaciones muestrales de las variables cuya significancia vamos a contrastar. Consideremos la partición del vector de parámetros β = [β1 β2], con lo que las restricciones quedarán R β - r = β 2 El estadístico quedará:
)kn/(uu
s/ˆ)XMX(ˆFc
t221
t2
t2
−=
ββ ∼ F(s , n – k)
Donde M1 = In – X1(Xt1X1)-1X
t1
En una forma más general podemos suponer que no necesariamente β2 = 0k-1 ; en tal sentido tendremos que en general R β 2 – r = β 2 - 0
2β y el estadístico será:
)kn/(uu
s/)ˆ)(XMX()ˆ(Fc
t
02221
t2
t022
−−−
=ββββ ∼ F(s , n – k)
Contraste de significancia mediante Sumas Residuale s Sea SRS (Suma Residual Sin Restringir) la suma residual del modelo en consideración estimado por MCO, es decir SRS = uu t . Sea la hipótesis nula H0 : β2 = 0s , donde β2 es un subvector de s variables. Sea SRR (Suma Residual Restringida) la suma residual del modelo estimado excluyendo las variables del subvector β2 , realizamos el contraste con: (SRR – SRS)/s ∼ F(s, n – k) SRS/(n-k) PRUEBAS DE QUIEBRE ESTRUCTURAL Y ESTABILIDAD DE PAR AMETROS Generalmente, como parte del proceso de estimación e inferencia en el modelo lineal se realizan pruebas de estabilidad de los parámetros y de quiebre estructural. Si los parámetros no son estables, la capacidad predictiva del modelo se reduce de manera importante, ya que existe una probabilidad de que los parámetros relevantes para un periodo futuro sean diferentes a los estimados para el periodo muestral utilizado. Contraste de Quiebre Estructural de Chow Se consideran H0 : Ausencia de quiebre estructural en el periodo t H1 : Existencia de quiebre estructural en el periodo t Para realizar esta prueba de hipótesis se realizan 3 estimaciones del modelo propuesto, una primera con todo el periodo muestral, y dos adicionales con datos desde 1 a t y después de t+1 hasta n, respectivamente. Para cada modelo se calcula la suma de cuadrados de los residuos; luego se calcula el siguiente estadístico F:
[ ])k2n/()SRSR(k/)SRSR(SRR
Fc21
21
−++−
= ∼ F(k , n –2k)

Donde: SRR : Suma de cuadrados residuales para la muestra completa SR1 : Suma de cuadrados residuales para la muestras de 1 a t
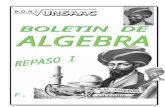
SR2 : Suma de cuadrados residuales para la muestra de t+1 hasta n Contraste de Estabilidad Existen dos pruebas de hipótesis utilizadas frecuentemente para docimar la estabilidad de parámetros basados en los residuos recursivos: CUSUM y CUSUMQ. Los residuos recursivos para el periodo t son aquellos que se calculan utilizando los parámetros estimados con datos hasta el periodo t-1. Intuitivamente, si existe un cambio en los parámetros poblacionales el modelo generará un error importante, generando un residuo recursivo grande (negativo o positivo). Ambas pruebas calculan una serie de residuos recursivos y bandas de confianza a su alrededor; si la serie de residuos se escapa de la banda de confianza, entonces los parámetros del modelo no son estables.
El CUSUM y el CUSUMQ se diferencian porque el segundo calcula la serie de residuos recursivos acumulando sus valores cuadráticos para evitar que errores positivos se compensen con errores negativos.
CUSUM
CUSUMQ

PREDICCION EN EL MODELO LINEAL GENERAL Si el modelo presenta un residuo bien comportado y los parámetros son estables, entonces puede utilizarse para realizar predicciones. Supongamos que queremos predecir la evolución de la variable endógena a lo largo de un número H de periodos futuros, con lo que Yt
f = (YT+1, YT+2,... , YT+H), tendremos: Yt
f = Xfβ + uf Definimos el error de predicción como: eT(p) = Yf - ETYf Donde se cumple que: E(eT(H)) = 0T Y Var(eT(H)) = σ2
u [IT + Xf(XtTXT)
-1Xtf]
Medida de la precisión de la predicción Las medidas para valorar la precisión de los modelos de predicción están diseñadas para evaluar la predicción ex post:
a) Raíz del Error Cuadrático Medio (RECM)
∑+
+=
=HT
1Tt
2te
H1
RECM
b) Error Absoluto Medio (EMA)
H
eEMA
HT
1Tt
2t∑
+
+==
c) Coeficiente de desigualdad de Theil (U de Theil)
∑∑
∑+
+=
+
+=
+
+=
+
−=
HT
1Tt
2t
HT
1Tt
2t
HT
1Tt
2tt
YH1
YH1
)YY(H1
U

UNIVERSIDAD NACIONAL DE INGENIERÍ A ESCUELA PROFESIONAL DE INGENIERIA ECONÓM ICA
SEMESTRE 2010 - I Curso : Econometría II Profesor : Rudy Laguna Asesor : Fernando Jáuregui CONDICIONES DE GAUSS - MARKOV Son 4:
i) E(ui) = 0 ii) Var(ui) = σ2 (constante), para todo i iii) Cov(ui , uj) = 0, para todo i ≠ j iv) Cov(xi , ui) = 0
De las condiciones i) y ii) obtuvimos que: E(uut) = σ2
uI . Cuando se cumplen estas condiciones se dice que los errores son esféricos. ¿Qué sucede si estos supuestos no se cumplen? ... La violación del segundo supuesto da origen al problema de HETEROSCEDASTICIDAD, mientras que el no cumplimiento del tercero provoca el problema de AUTOCORRELACION. Para tratar estos problemas intentaremos analizar los efectos que tiene sobre el estimador MCO la siguiente condición: E(uut) = σ2
u Σ , donde Σ ≠ In . Entonces al considerar el modelo Y = Xβ + u , y que Var(u) = E(uut) = σ2
u Σ , donde Σ ≠ In se puede llegar a demostrar que:
a) El estimador MCO dado por YX)XX(ˆ t1tMCO
−=β es insesgado: ββ =)ˆ(E MCO
b) La varianza del estimador MCO es: 1tt1t2
uMCO )XX(XX)XX()ˆ(Var −−= Σσβ
ESTIMADOR DE MINIMOS CUADRADOS GENERALIZADOS (MCG) Se busca transformar el modelo en otro cuyos coeficientes fuesen los mismos que en el modelo original pero cuyo término de error tuviera una matriz de covarianzas escalar. Si ello fuese posible podemos aplicar MCO en el modelo transformado. Partamos de Y = Xβ + u → (PY) = (PX)β + (Pu) Si hacemos Y* = PY, X* = PX, u* = Pu , entonces Y* = X*β + u* La matriz de covarianzas del nuevo término de error será: Var(u*) = Var(Pu) = σ2
u PΣPt
Repaso de Econometría I: Perturbaciones No Esférica s

Buscaremos ahora una matriz P que pueda hacer que PΣPt = I , para esto descomponemos la matriz Σ: Σ = VVt → V-1Σ(V-1)t = I con lo que resulta que P = V-1 Con esto, las transformaciones anteriores serán realmente: Y* = V-1Y, X* = V-1X, u* = V-1u Y ahora se cumplirá que: Var(u*) = σ2
u V-1Σ(V-1)t = σ2
u I Basados en el estimador MCO, podemos encontrar el estimador de MCG: βMCG = (X*tX*)-1X*tY* ⇒ YX)XX(ˆ 1t11t
MCG−−−= ΣΣβ
Adicionalmente, el estimador de MCG cumplirá con que:
E( β MCG) = 0 y que Var( β MCG) = σ2u (X
tΣ-1X)-1
Finalmente se puede calcular el estimador: kn
uuˆ MCG
1tMCG2
MCG −=
−Σσ
donde se utiliza: MCGMCGˆXYu β−=
HETEROSCEDASTICIDAD Aquí se presentan 2 casos, el primero esta relacionado con su eficiencia mientras que el segundo con su eficiencia estadística. La estructura de covarianzas bajo el problema de heteroscedasticidad es:
==
2n
22
21
t
00
00
00
)uu(E)u(Var
σ
σσ
L
MOMM
L
L
Si los parámetros σ2
1 , σ22 , ..., σ2
n son conocidos, esta matriz puede descomponerse en:
t
n
2
1
n
2
1
2n
22
21
VV
00
00
00
00
00
00
00
00
00
=
=
σ
σσ
σ
σσ
σ
σσ
L
MOMM
L
L
L
MOMM
L
L
L
MOMM
L
L
Con esto:
=−
n
2
1
1
/100
0/10
00/1
V
σ
σσ
L
MOMM
L
L
Ahora podemos conocer la forma de los vectores trasformados, por ejemplo:
== −
nn
22
11
1
/u
/u
/u
uV*u
σ
σσ
M
Lo que hemos conseguido es estandarizar los errores. Dado que la esperanza de los errores es cero, el denominador de los elementos en u* puede interpretarse como la desviación con respecto a ala media, y al dividirlo entre la desviación estándar obtenemos los errores

estandarizados. Por ello se distribuirán normalmente con media 0 y varianza 1. Esto sería el beneficio de esta transformación. El costo es que las demás variables del modelo también han sido divididas por dicha desviación estándar con lo cual su interpretación es distinta a la original. Causas de la Heteroscedasticidad
i) Relación entre las variables explicativas y la v arianza del error: La heteroscedasticidad surge cuando los valores de las variables involucradas en la regresión varían significativamente para cada observación. En estos casos es probable que las variaciones en el término de error tiendan a ser pequeños cuando las variables registran valores pequeños y grandes cuando las variables involucran valores elevados.
ii) Datos Agregados: Al momento de trabajar con datos agregados es común encontrarse con errores heteroscedásticos. Si se trabaja con promedios de datos obtenidos de distintos grupos, la varianza de estos datos será inversamente proporcional al número de individuos considerados en el grupo. Además la dispersión misma de los datos juega un papel importante.
iii) Error de especificación: Si se omite una variable relevante al momento de plantear el modelo, la varianza del error del modelo mal especificado vendría dado por la varianza del modelo verdadero (la cual es constante) más el cuadrado del producto de la variable omitida y su coeficiente. De esta forma, la varianza del error del modelo mal especificado no sería constante.
Procedimiento de estimación por MCG bajo presencia de Heteroscedasticidad
1. Se estima el modelo por MCO, ignorando la presencia de heteroscedasticidad. 2. Se establece un supuesto acerca de la estructura de la sucesión σ2
t. 3. Se utilizan los residuos MCO para estimar la forma funcional supuesta para σ2
t. 4. Se divide cada observación por la estimación σ2 (raíz cuadrada de σ2
t). 5. Se vuelve a estimar el modelo pero con las variables transformadas.
Contrastes de Heteroscedasticidad Los contrastes designados para detectar la presencia de heteroscedasticidad utilizan generalmente los residuos mínimos cuadráticos. Para todos los contrastes se considera como hipótesis nula la ausencia de heteroscedasticidad. Entre los principales contrastes podemos mencionar:
a) Contraste de Goldfeld y Quandt. b) Contraste de Breush y Pagan. c) Contraste de Glesjer. d) Contraste de Harvey. e) Contraste de White f) Contraste de Spearman
AUTOCORRELACION La tercera condición de Gauss – Markov implica que el término de error para cada observación se determina independientemente de los valores que pueda arrojar el resto de las

observaciones de la muestra. Específicamente, la independencia de las perturbaciones implica que su covarianza es cero (Cov(ui , uj) = 0, para todo i ≠ j). Cuando esta condición no se cumple se dice que el error presenta autocorrelación. Los problemas asociados a la presencia de autocorrelación son similares a las que se presentan ante errores heteroscedásticos. Los estimadores MCO se mantienen insesgados pero dejan de ser eficientes. Pero como alternativa a la estimación MCO, la estimación por MCG arroja estimadores más eficientes en el sentido de presentar menor varianza. Causas de la Autocorrelación
i) Presencia de Ciclos Económicos y Tendencias: Muchas variables económicas presentan un comportamiento cíclico. Además sabemos que existen series económicas que se mueven de manera conjunta. Un modelo que incluya variables con estos comportamientos puede presentar autocorrelación.
ii) Presencia de Relaciones No Lineales: A pesar que el modelo es lineal en los parámetros, puede existir una relación que no sea lineal en las variables. Puede que la relación sea cuadrática y ello no ha sido incluido en el modelo.
iii) Variables omitidas: La perturbación de un modelo recoge la influencia de aquellas variables que afectan el comportamiento de la variable dependiente pero no han sido incluidas en el modelo. La persistencia de los efectos de las variables no incluidas es probablemente la causa más frecuente para la existencia de autocorrelación.
iv) Relaciones dinámicas: Al establecer modelos con variables económicas que son tomadas periódicamente, puede ocurrir que en la especificación del modelo se omita algún retardo de la variable endógena; esto provocaría que el término de error del modelo incorporaría dicha variable, presentando ciertas propiedades sistemáticas que no serían mas que el resultado de la influencia de Yt-j sobre Yt.
Estructura de la matriz de varianzas y covarianzas Si aún consideramos que los errores son homoscedásticos, podemos considerar que la matriz de varianzas y covarianzas tiene la siguiente forma:
==
−−−−
−
−
−
1
1
1
1
)u(Cov
4n3n2n1n
3n2
2n2
1n32
2u
2u
L
MOMMMM
L
L
L
ρρρρ
ρρρρρρρρρρρρ
σΣσ
La forma mostrada corresponde al hecho de que Cov(ut , ut-j) = ρj σ2
u Entonces será necesario estimar la matriz Σ y a partir de ella podemos estimar por MCG:
YX)XX(ˆ 1t11tMCG
−−−= ΣΣβ
Detección de Autocorrelación Existen pruebas que nos sugieren la forma de la autocorrelación y otros que nos dirán simplemente si hay o no autocorrelación.

a) Test de Durbin Watson (d) Verifica la autocorrelación de primer orden: ut = ρut-1 + εt (εt es un ruido blanco) Se considera H0 : No existe Autocorrelación H1 : Existe Autocorrelación
El estadístico propuesto es: 2t
n2
21tt
n2
u
)uu(d
∑
−∑= −
Donde tu son los residuos MCO obtenidos de uˆXY MCO += β
Próximo a 2 : Ausencia de Autocorrelación Próximo a 0 ó 4 : Si hay autocorrelación
• Próximo a 0: Autocorrelación Positiva • Próximo a 4: Autocorrelación Negativa
Hay zonas donde no hay posibilidad de rechazar ni de aceptar la hipótesis nula. Adicionalmente, podemos aproximar como )ˆ1(2d MCOρ−=
Donde el parámetro ρ fluctúa entre –1 y 1
b) Test de Breush (Test de Multiplicadores de Lagra nge)
Es una ampliación al test de Durbin Watson. En forma general se considera el modelo AR (p): ut = ρ1ut-1 + ρ2ut-2 + ρ3ut-3 + ... + ρput-p + εt (εt es un ruido blanco) Se considera H0 : No existe Autocorrelación Serial de orden k H1 : Existe Autocorrelación
Donde: ∑∑ −=
n
1
2t
n
1 kttk
u
uur
Luego de estimar por MCO en la regresión inicial, encontramos ut; después se regresiona sobre sus p rezagos así como de las variables explicativas xi. De esta última se obtiene el R2. Finalmente:
nR2 ∼ χ2 (p)
Si nR2 > χ2 (p) se rechaza la hipótesis nula de no autocorrelación
c) Test de Ljung – Box y Box – Pierce
En el caso en donde el conjunto de variables explicativas son todas exógenas, podemos utilizar el estadístico propuesto por Box – Pierce:

∑=
=p
1i
pirnQ ∼ χ2 (p)
Alternativamente, Ljung – Box presentan un refinamiento del estadístico Q:
∑= −
+=′p
1i
2i
)in(r
)2n(nQ ∼ χ2 (p)
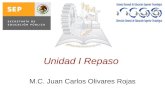
En forma complementaria, mostraremos que los programas econométricos presentan estos estadísticos junto con el Correlograma del término de error. Veamos por ejemplo el siguiente resultado obtenido a través del análisis con el programa Econometric Views:
Correcciones con presencia de Autocorrelación Al igual que en la heteroscedasticidad, la presencia de autocorrelación origina la estimación de parámetros no eficientes. En este sentido, la corrección de este problema se basa en la utilización de un procedimiento alternativo a MCO que arroja estimadores de menor varianza. Se buscará entonces realizar transformaciones a las variables originales de modo que se garantice la obtención de estimadores más eficientes. De esta forma estudiaremos el denominado proceso iterativo de Cochrane – Orcutt. Consideremos:
Yt = α + Xttβ + ut ……………………………(1)
donde ut = ρut-1 + εt (εt es un ruido blanco) Si hacemos: X*t
t = Xtt - ρXt
t-1 Y*t
t = Ytt - ρYt
t-1

Multipliquemos al modelo original por ρ: ρYt = ρα + ρXttβ + ρut
Si rezagamos un periodo: ρYt-1 = ρα + ρXt
t-1 β + ρut-1 .........................(2) Al restar las ecuaciones (1) – (2): (Yt - ρYt-1 ) = α - ρα + (Xt
tβ - ρXtt-1 β) + (ut - ρut-1 )
Finalmente el modelo transformado será:
Y*t = α(1 - ρ) + X*ttβ + εt
Donde se ha conseguido que el término de error sea un ruido blanco (εt ∼ N(0,σ2
ε ))

UNIVERSIDAD NACIONAL DE INGENIERÍ A ESCUELA PROFESIONAL DE INGENIERIA ECONÓM ICA
SEMESTRE 2010 - I Curso : Econometría II Profesor : Rudy Laguna Asesor : Fernando Jáuregui PROBLEMAS DE DATOS Es frecuente que los datos disponibles para estimar un modelo de regresión no se adapten exactamente a la teoría en que se basa el modelo. Suelen surgir problemas como:
1) Multicolinealidad: Las variables medidas están tan correlacionadas unas con otras que no es posible analizar con precisión los efectos individuales de cada una de ellas.
2) Datos incompletos: Algunos datos no son recogidos. 3) Datos agrupados: La información contenida en los datos originales no son conocidos
ya que los datos disponibles se han obtenido a partir de medias de los datos originales o con algún otro método de agregación.
4) Errores de medida: Los datos medidos no corresponden a los datos del modelo, bien porque la medición ha sido imprecisa, o bien porque las variables del modelo, por su naturaleza, no son medibles.
DEFINICIÓN DEL PROBLEMA DE MULTICOLINEALIDAD Si sucede que Rango(X) = n < k, entonces matriz X no puede tener rango completo con lo que
el determinante de la matriz XtX es cero por lo que (XtX)-1 es indeterminado y MCOβ .
La multicolinealidad se refiere solo a las relaciones lineales entre las variables independientes y no a cualquier otro tipo de relación, si xi = x2
j, entonces no existirá multicolinealidad en el modelo. El problema de la multicolinealidad esta definido por el alto grado de intercorrelación entre las variables explicativas. Entonces se trata de un problema de grado y no teórico como el caso de la heteroscedasticidad o la autocorrelación. Todo modelo econométrico tenderá a presentar este problema, solo que en algunos casos la severidad del problemas es será mayor. En este sentido, el grado se refiere a la severidad de la correlación entre las variables explicativas. IMPLICANCIAS DE LA MULTICOLINEALIDAD
1. Multicolinealidad Exacta o Perfecta Cuando una de las variables explicativas es una combinación lineal determinista de todas las demás o de algunas de ellas. Es fácilmente detectable ya que genera que la
Repaso de Econometría I: Multicolinealidad

matriz XtX sea singular. Al trabajar esto en un programa econométrico automáticamente arrojará un mensaje que pondría de manifiesto la singularidad de la dicha matriz.
En este caso no es posible hallar una solución única para los coeficientes de la regresión individual, dado que existirán infinitas soluciones al sistema de ecuaciones normales. Pero cualquiera de los vectores que soluciona el sistema genera la misma suma residual con lo que cualquiera de ellos provocará la misma medida de bondad de ajuste (R2). Sin embargo, si se puede obtener una solución única para combinaciones lineales de estos coeficientes.
2. Multicolinealidad Aproximada o Severa Ocurre cuando una de las variables es aproximadamente igual a una combinación lineal de las restantes. Este tipo de multicolinealidad no es detectable por los programas econométricos. En este caso se pueden detectar las siguientes consecuencias:
� Los estimadores MCO presentan varianzas grandes, lo que hace difícil su estimación precisa.
� Por lo anterior, los intervalos de confianza serán más amplios por lo que se tenderá a aceptar más fácilmente la hipótesis nula de cero
� Pequeños cambios en los datos pueden generar grandes variaciones en las estimaciones de los parámetros.
� Debido a lo anterior, pueden tener errores estándar muy elevados y niveles de significancia bajos aún cuando todas las variables conjuntamente sean significativas y el R2 de la regresión sea bastante alto.
� Los coeficientes pueden tener signo opuesto al esperado o una magnitud poco creíble.
DETECCION DE LA MULTICOLINEALIDAD Existen diversos indicadores y métodos para contrastar la existencia de multicolinealidad, los más útiles son:
1. R2 altos y valores de t bajos. 2. Altas correlaciones entre los regresores (mayor a 0.8). 3. Realizar regresiones auxiliares.
Si se sospecha que Xi esta relacionado con alguna otra de las k-2 variables explicativas restantes, planteamos.
Xi = α1X1 + α2X2 + ... αi-1Xi-1 + αi+1Xi+1 + ... αk-1Xk-1 + νi
A partir de esta relación encontramos su coeficiente de determinación R2
i, con esto formamos:

)1kn/()R1(
)2k/(RR
2i
2i
i +−−−= ∼ F(k-2 , n-k+1)
Donde contrastamos H0: αi = 0 , para todo i (No existe multicolinealidad)
4. Número de Condición (γ):
Sean λi los valores propios de la matriz XtX, formamos: min
max
λλγ =
Donde si γ > 20 nos da indicios de la existencia de multicolinealidad. SOLUCIÓN AL PROBLEMA DE LA MULTICOLINEALIDAD
1. Eliminar de la regresión la variable que se sospecha causa la multicolinealidad. 2. Incorporar información adicional.
3. Estimador de regresión cresta ( cβ ). Con este método se busca encontrar un estimador ligeramente sesgado pero de reducida varianza, es decir, un estimador con menor ECM. Definido por YX)rDXX(ˆ t1t
c−+=β
Donde D es una matriz diagonal cuyos elementos diagonales coinciden con los de la matriz XtX y el escalar r se escoge arbitrariamente; r debe escogerse de manera que los estimadores sean estables con respecto a pequeñas variaciones de r. Se sugiere empezar con valores pequeños, digamos 0,01 e ir aumentando los valores hasta que los coeficientes se estabilicen.