
PROBABILITAT I PROCESSOS ESTOCÀSTICS PER A … · SESSIÓ 21: Definició, modelatge i propietats...
200
LaSalleOnLine ENGINYERIES PROBABILITAT I PROCESSOS ESTOCÀSTICS PER A L’ENGINYERIA TIC Guia d’estudi Álvaro Gaspar, Josep Mª Martorell i Xavier Vilasís 2009 Creative Commons Deed
Transcript of PROBABILITAT I PROCESSOS ESTOCÀSTICS PER A … · SESSIÓ 21: Definició, modelatge i propietats...
LaSa
lle
On
Lin
e
EN
GIN
YER
IES
PROBABILITAT I PROCESSOS ESTOCÀSTICS PER A L’ENGINYERIA TIC
Guia d’estudi Álvaro Gaspar, Josep Mª Martorell i Xavier Vilasís
2009 Creative Commons Deed

Creative Commons License Deed Reconeixement-No comercial-Sense obres derivades 3.0 Espanya
Vostè és lliure de:
Copiar, distribuir i comunicar públicament l’obra.
Sota els següents condicionants:
Reconeixement. S’ha de referenciar aquesta obra a Álvaro Gaspar de Valenzuela, Josep Mª Martorell i Xavier Vilasis - Enginyeria La Salle (Semipresencial) No comercial. No es pot utilitzar aquesta obra per a finalitats comercials. Sense obres derivades. No es pot alterar, transformar o generar una obra derivada a partir d’aquesta.
• Quan reutilitzeu o distribuïu l'obra, heu de deixar ben clar els termes de la llicència de l'obra. • Alguna d'aquestes condicions pot no aplicar-se si obteniu el permís del titular dels drets d'autor. • No hi ha res en aquesta llicència que menyscabi o restringeixi els drets morals de l'autor.
Els drets derivats d'usos legítims o altres limitacions reconegudes per llei no queden afectats per l'anterior
Això és un resum fàcilment llegible del text legal (la llicència completa) disponible en els idiomes següents:
Català Castellà Basc Gallec

Crèdits Autor: Álvaro Gaspar de Valenzuela, Josep Mª Martorell i Xavier Vilasís
Editor: Lluís Vicent
Coordinació lingüística: Sara Laso
Revisió lingüística: Christian Lara
Maquetació: Víctor Miras
Disseny de portada: Víctor Miras
Aquesta edició ha comptat amb el suport de l’Agència de Gestió d’Ajuts Universitaris i de Recerca (AGAUR) de la Generalitat de
Catalunya en la Convocatòria d’ajuts a l’edició i la difusió de llibres de text o manuals universitaris i llibres cientificotècnics, en suport
paper o en suport electrònic, escrits en llengua catalana (DILL 2009)
ISBN: 978-84-937374-6-7

1
Índex
SESSIÓ 1: Introducció .................................................................................................... 7
1 Introducció................................................................................................................. 7
1.1 Combinatòria .................................................................................................................. 7 1.1.1 Agrupacions per elements distingibles ................................................................................... 7 1.1.2 Agrupacions per elements no distingibles .............................................................................. 8
1.2 Model matemàtic ........................................................................................................... 9 1.2.1 Model determinístic .............................................................................................................. 9 1.2.2 Model probabilístic ................................................................................................................ 9
SESSIÓ 2: ..................................................................................................................... 11
2 Probabilitat ............................................................................................................. 11
2.1 Concepte....................................................................................................................... 11 2.1.1 Espai mostral ....................................................................................................................... 11 2.1.2 Definicions de la probabilitat ............................................................................................... 12
2.2 Teoria axiomàtica ......................................................................................................... 13 2.2.1 Teoria axiomàtica ................................................................................................................ 13 PROBLEMA................................................................................................................................... 13 PROBLEMA................................................................................................................................... 13
SESSIÓ 3: Independència de successos ....................................................................... 15
2.3 Probabilitat condicionada ............................................................................................. 15 2.3.1 Probabilitat condicionada .................................................................................................... 15 2.3.2 Independència de successos ................................................................................................ 17
2.4 Probabilitat total .......................................................................................................... 18 2.4.1 Teorema de la probabilitat total .......................................................................................... 18 2.4.2 Regla de Bayes..................................................................................................................... 18 PROBLEMA................................................................................................................................... 19
SESSIÓ 4: Problemes de probabilitat .......................................................................... 21
2.5 Problemes..................................................................................................................... 21 2.5.1 Probabilitats simples............................................................................................................ 21 2.5.2 Probabilitat condicionada .................................................................................................... 23 PROBLEMA................................................................................................................................... 24 PROBLEMA................................................................................................................................... 25
SESSIÓ 5: Conceptes i tipus de V.A. en 1-D ................................................................. 27
3 variables aleatòries en 1-D ...................................................................................... 27
3.1 Conceptes ..................................................................................................................... 27 3.1.1 Definició i propietats d’una variable aleatòria ...................................................................... 27
3.2 Classificació de variables aleatòries .............................................................................. 28 3.2.1 Variables aleatòries discretes............................................................................................... 28 3.2.2 Variables aleatòries contínues ............................................................................................. 29 3.2.3 Variables aleatòries mixtes .................................................................................................. 30 PROBLEMA................................................................................................................................... 31 PROBLEMA................................................................................................................................... 32
2
SESSIÓ 6: Models de distribucions .............................................................................. 33
3.3 Models de distribucions................................................................................................ 33 3.3.1 Models per v.a. discretes ..................................................................................................... 33 3.3.2 Models per v.a. contínues .................................................................................................... 35 PROBLEMA................................................................................................................................... 36 PROBLEMA................................................................................................................................... 36
SESSIÓ 7: Transformacions de variables aleatòries .................................................... 39
3.4 Transformacions de variables aleatòries ...................................................................... 39 3.4.1 Transformacions per V.A. discretes ...................................................................................... 39 3.4.2 Transformació de V.A.C. ...................................................................................................... 41 PROBLEMA................................................................................................................................... 42 PROBLEMA................................................................................................................................... 42
SESSIÓ 8: Característiques d’una variable aleatòria ................................................... 43
3.5 Característiques d’ una variable aleatòria .................................................................... 43 3.5.1 Esperança matemàtica ........................................................................................................ 43 3.5.2 Variància ............................................................................................................................. 44 3.5.3 Moments d’una variable aleatòria ....................................................................................... 45 PROBLEMA................................................................................................................................... 45
SESSIÓ 9: Funció característica ................................................................................... 47
3.6 Càlcul de probabilitats i funció característica ............................................................... 47 3.6.1 Càlcul de probabilitats ......................................................................................................... 47 3.6.2 Funció característica ............................................................................................................ 48 PROBLEMA................................................................................................................................... 50 PROBLEMA................................................................................................................................... 50
SESSIÓ 10: Problemes de variables aleatòries en una dimensió ................................. 51
3.7 Problemes de V.A. en 1D .............................................................................................. 51 3.7.1 Problemes sobre distribucions ............................................................................................. 51 3.7.2 Problemes sobre transformacions........................................................................................ 53 3.7.3 Problemes sobre característiques ........................................................................................ 54
SESSIÓ 11: Variables aleatòries n-dimensionals ......................................................... 57
4 Variables aleatòries en n-D ..................................................................................... 57
4.1 Definicions .................................................................................................................... 57 4.1.1 Funció de distribució conjunta ............................................................................................. 57
4.2 V.A. bidimensionals ...................................................................................................... 59 4.2.1 V.A. bidimensionals discretes ............................................................................................... 59 4.2.2 V.A. bidimensionals contínues ............................................................................................. 60 PROBLEMA................................................................................................................................... 61
SESSIÓ 12: Independència de variables ...................................................................... 63
4.3 Distribucions condicionades ......................................................................................... 63 4.3.1 Distribucions discretes condicionades .................................................................................. 63 4.3.2 Distribucions contínues condicionades................................................................................. 64
4.4 Independència de variables aleatòries ......................................................................... 66 4.4.1 Independència de variables aleatòries ................................................................................. 66 PROBLEMA................................................................................................................................... 66
3
SESSIÓ 13: transformacions de v.a. bidimensionals ................................................... 69
4.5 Transformacions de v.a. bidimensional ........................................................................ 69 4.5.1 Funció de v.a. bidimensional ................................................................................................ 69 4.5.2 Casos particulars d’interès ................................................................................................... 70 4.5.3 Canvi de variable per v.a.d. .................................................................................................. 71 4.5.4 Canvi de variable per v.a.c. .................................................................................................. 72 PROBLEMA................................................................................................................................... 73 PROBLEMA................................................................................................................................... 73
SESSIÓ 14: característiques, covariància i correlació .................................................. 75
4.6 Característiques, covariància i correlació ...................................................................... 75 4.6.1 Característiques ................................................................................................................... 75 4.6.2 Covariància .......................................................................................................................... 76 4.6.3 Correlació ............................................................................................................................ 78 PROBLEMA................................................................................................................................... 79 PROBLEMA................................................................................................................................... 79
SESSIÓ 15: problemes de V.A. en 2-D ......................................................................... 81
4.7 Problemes de V.A. en 2-D ............................................................................................. 81 4.7.1 Càlcul de probabilitats ......................................................................................................... 81 4.7.2 Transformacions de variables bidimensionals ...................................................................... 83 4.7.3 Independència de variables ................................................................................................. 84
SESSIÓ 16: regressió lineal .......................................................................................... 87
5 Regressió i correlació ............................................................................................... 87
5.1 Regressió lineal ............................................................................................................. 87 5.1.1 Regressió lineal.................................................................................................................... 87 PROBLEMA................................................................................................................................... 90
SESSIÓ 17: Corba de regressió .................................................................................... 91
5.2 Corba de regressió ........................................................................................................ 91 5.2.1 Corba de regressió ............................................................................................................... 91 PROBLEMA................................................................................................................................... 94
SESSIÓ 18: Teorema del límit central .......................................................................... 95
5.3 Teorema del límit central ............................................................................................. 95 5.3.1 Suma de variables aleatòries................................................................................................ 95 5.3.2 Llei dels grans nombres ....................................................................................................... 97 5.3.3 Teorema del límit central ..................................................................................................... 98 PROBLEMA................................................................................................................................... 99
SESSIÓ 19: Distribucions gaussianes ......................................................................... 101
5.4 Distribucions gaussianes ............................................................................................. 101 5.4.1 Distribucions gaussianes bidimensionals ............................................................................ 101 5.4.2 Generalització a n dimensions ........................................................................................... 103 PROBLEMA................................................................................................................................. 104
SESSIÓ 20: Problemes de regressió i correlació ........................................................ 105
5.5 Problemes de regressió i correlació ............................................................................ 105 5.5.1 Problemes sobre regressió lineal........................................................................................ 105 5.5.2 Problemes sobre corbes de regressió ................................................................................. 107 5.5.3 Distribucions gaussianes .................................................................................................... 108
4
SESSIÓ 21: Definició, modelatge i propietats de processos estocàstics .................... 111
6 Processos estocàstics ............................................................................................. 112
6.1 Definició, modelatge i propietats ............................................................................... 112 6.1.1 Definició i model................................................................................................................ 112 6.1.2 Propietats .......................................................................................................................... 113
SESSIÓ 22: Processos de Poisson i senyal telegràfic.................................................. 115
6.2 Processos de Poisson i senyal telegràfic ..................................................................... 115 6.2.1 Processos de Poisson ......................................................................................................... 115 6.2.2 Senyal telegràfic ................................................................................................................ 117
SESSIÓ 23: Processos de suma i random walk .......................................................... 119
6.3 Processos de suma ...................................................................................................... 119 6.3.1 Processos de suma ............................................................................................................ 119 6.3.2 Random walk i processos de Wiener .................................................................................. 120 PROBLEMA................................................................................................................................. 122 PROBLEMA................................................................................................................................. 122
SESSIÓ 24: processos estacionaris ............................................................................ 123
6.4 Propietats en temps diferents .................................................................................... 123 6.4.1 Propietats en temps diferents ............................................................................................ 123
6.5 Processos estacionaris ................................................................................................ 124 6.5.1 Processos estacionaris ....................................................................................................... 124 PROBLEMA................................................................................................................................. 126
SESSIÓ 25: Problemes de processos estocàstics ........................................................ 127
6.6 Problemes de processos estocàstics ........................................................................... 127 6.6.1 Característiques dels processos ......................................................................................... 127 6.6.2 Estacionarietat .................................................................................................................. 130 PROBLEMA................................................................................................................................. 131
Annex ....................................................................................................................... 133
PROBLEMES ...................................................................................................................... 133 Problema 1 ................................................................................................................................ 133 Problema 2 ................................................................................................................................ 134 Problema 3 ................................................................................................................................ 135 Problema 4 ................................................................................................................................ 136 Problema 5 ................................................................................................................................ 137 Problema 6 ................................................................................................................................ 142 Problema 7 ................................................................................................................................ 144 Problema 8 ................................................................................................................................ 145 Problema 9 ................................................................................................................................ 147 Problema 10 .............................................................................................................................. 150 Problema 11 .............................................................................................................................. 155 Problema 12 .............................................................................................................................. 159 Problema 13 .............................................................................................................................. 161 Problema 14 .............................................................................................................................. 163 Problema 15 .............................................................................................................................. 167 Problema 16 .............................................................................................................................. 170 Problema 17 .............................................................................................................................. 173 Problema 18 .............................................................................................................................. 174 Problema 19 .............................................................................................................................. 175

5
Problema 20 .............................................................................................................................. 176 Problema 21 .............................................................................................................................. 177 Problema 22 .............................................................................................................................. 177 Problema 23 .............................................................................................................................. 180 Problema 24 .............................................................................................................................. 182
Bibliografia ............................................................................................................... 189
Glossari..................................................................................................................... 191

6
7
SESSIÓ 1: Introducció
FITXA DE LA SESSIÓ � Nom: Introducció � Tipus: teòrica � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
OBJECTIUS En la primera sessió d’aquest curs presentarem de manera esquemàtica els diferents casos de la combinatòria, i buscarem ser capaços d’identificar en cada problema quina agrupació és aquella que s’ha d’utilitzar i quin n’és el resultat.
CONTINGUTS En aquesta sessió, exposarem els casos en què s’utilitza cada un dels diferents tipus d’agrupacions i n’estudiarem la formulació matemàtica. Finalment, també discutirem breument la manera de construir el model matemàtic del problema.
1 Introducció
1.1 Combinatòria
1.1.1 Agrupacions per elements distingibles
Distingibilitat d’elements Un conjunt pot tenir elements de diferents classes (per exemple, podem tenir boles de color blanc i de color negre). Dins de cada classe, els elements poden tenir alguna característica que permeti ordenar-los o numerar-los. És a dir, direm que són elements distingibles perquè malgrat pertànyer a la mateixa classe els podem diferenciar (per exemple, si les boles blanques anessin numerades).

8
Combinacions Suposarem que treballem amb un conjunt d’elements distingibles. Una primera possibilitat és agrupar els n elements en grups de m, sense importar-nos l’ordre amb què els escollirem. El número d’agrupacions possibles el dóna el coeficient binomial:
)!(!!mnm
nmn
C nm −
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
Permutacions Una altra possibilitat és calcular les diferents maneres amb què podem agrupar n elements. D’aquesta operació, en diem permutació i es calcula com:
!nPn =
Variacions Les variacions són com les combinacions però tenint en compte l’ordenació entre els m elements que escollim en un conjunt de n:
)!mn(!nPCV m
nm
nm −
==
� [Leon-Garcia1994] p42-p48
1.1.2 Agrupacions per elements no distingibles
No-distingibilitat d’elements En canvi, es pot donar el cas que tinguem un conjunt d’elements de la mateixa classe i sense cap propietat que els diferenciï. Per tant, no els podem ordenar sota cap criteri. Direm que es tracta d’elements no distingibles (per exemple, si les boles blanques no porten cap número o signe).
Combinacions Aquest és l’únic cas en el qual no tenim una fórmula general per a qualsevol cas, però senzillament el concepte és el mateix: grups de m elements d’un conjunt de n. Aquest cop, el nombre de possibilitats serà considerablement menor que en el cas d’elements distingibles.
9
Permutacions Les diferents ordenacions que es poden fer amb n elements no distingibles. Si suposem que tenim np elements de la classe p, les permutacions seran el quocient entre les permutacions distingibles i totes aquelles entre els elements de la mateixa classe (perquè entre ells no són distingibles):
∏=
pD,n
D,nND,n
pP
PP
Variacions Seguint el mateix concepte que pel cas d’elements distingibles, les variacions per elements no distingibles les calculem sumant les permutacions per totes aquelles combinacions possibles:
∑=comb
ND,mn
ND,m PV
� [Martorell2001a], p3-p4
1.2 Model matemàtic
1.2.1 Model determinístic El model determinístic és adequat per aquells fenòmens o experiments en què en iguals condicions s’obtenen iguals resultats. És a dir, és un fenomen repetible o predible. Les petites desviacions produïdes en els resultats per igual condició inicial són el que quotidianament anomenem soroll; és a dir, errors produïts per falta de precisió en les dades, inexactituds o aproximacions del model, etc.
1.2.2 Model probabilístic En canvi, un model probabilístic és adequat per aquells experiments que estudiarem durant aquest curs: aquells en què repeticions del mateix experiments no donen lloc a idèntics resultats. És a dir, es tracta de fenòmens no absolutament predibles. per a la construcció del model s’ha de tenir en compte la definició de l’experiment, l’estudi dels resultats possibles i l’assignació de probabilitats.
RESUM En aquesta sessió hem assentat els elements bàsics de la combinatòria, tant per a elements distingibles com per a no distingibles, i hem parlat de les principals característiques que diferencien models determinístics i probabilístics.

10
11
SESSIÓ 2:
FITXA DE LA SESSIÓ � Nom: � Tipus: teòrica � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� ����������������
PRECEDENTS A la sessió anterior hem establert les bases que ens permetran desenvolupar la teoria de la probabilitat. Hem presentat les diferents formulacions de la combinatòria i com construir un model probabilístic del sistema a estudiar.
OBJECTIUS L’objectiu d’aquesta sessió és presentar per primer cop què és realment una probabilitat i, més enllà de com es calcula, quines són les seves propietats. En estudiar aquestes desenvoluparem també la nostra intuïció en operacions lògiques amb conjunts, eina que ens serà útil més endavant.
CONTINGUTS Per l’assoliment d’aquests objectius, en primer lloc presentarem una visió històrica del concepte de probabilitat, tot intentant entendre a partir de la seva evolució la definició axiomàtica que utilitzarem. Un cop presentada aquesta definició, n’estudiarem les propietats.
2 Probabilitat
2.1 Concepte
2.1.1 Espai mostral L’objectiu del nostre estudi són aquells experiments en què són possibles més d’un resultat o, més exactament, aquells fenòmens en què les condicions de l’experiment no ens permeten precisar quin serà el resultat, perquè la naturalesa del fenomen implica que en iguals condicions inicials no s’obtingui el mateix resultat.
12
Espai mostral i succés Anomenarem succés a cada un dels esdeveniments que poden ocórrer en un determinat experiment. L’espai mostral Ω (al qual sovint també ens referirem com a univers) és el conjunt de successos possibles en aquest experiment. Un resultat és un conjunt d’un o més esdeveniments que poden succeir simultàniament en un experiment. Alguns autors diferencien succés de resultat anomenant-los, respectivament, succés elemental o succés compost.
� [Leon-Garcia1994] p27-28 (vegeu també exemple 2.3)
2.1.2 Definicions de la probabilitat Històricament han aparegut diferents intents de definir la probabilitat de manera matemàticament coherent.
Definició freqüencial Suposem que en n realitzacions d’un experiments ha succeït l’esdeveniment A un número nA de vegades. El quocient entre aquestes dues quantitats ens donaria la freqüència amb què ha succeït A. En el límit, la definició freqüencial de probabilitat és
[ ]n
nn
límAp A
∞→=
� [Leon-Garcia1994] p6-7 (vegeu especialment la figura 1.4)
� [Martorell2001a] p5-6
Definició clàssica Laplace va desenvolupar una definició de probabilitat vàlida per aquells experiments en què tots els successos possibles són equiprobables. Segons aquesta definició, la probabilitat d’un resultat és igual al quocient entre el nombre de casos favorables (els successos compatibles amb aquell resultat) i el nombre de casos possibles (tots els successos).
� [Martorell2001a]

13
2.2 Teoria axiomàtica
2.2.1 Teoria axiomàtica Kolmogorov va definir la probabilitat d’un resultat A com una aplicació de l’espai de successos a l’espai dels reals. És a dir, a cada succés o resultat li correspon un número real, que és el que habitualment anomenem probabilitat.
Probabilitat Segons l’axiomàtica de Kolmogorov, la probabilitat és una aplicació de l’espai dels successos a l’espai dels números reals, que verifica tres propietats bàsiques: tota probabilitat és no-nul·la, la probabilitat de l’espai mostral és 1, i la probabilitat d’una unió de successos disjunts és la suma de les seves probabilitats. Alguns autors afegeixen un quart axioma sobre la probabilitat de la intersecció de successos.
� [Leon-Garcia1994] p31-32
� [Martorell2001a] p6
Propietats De la definició de probabilitat en surten com a conseqüències tota una sèrie de propietats, algunes de les més importants sobre la probabilitat d’unions i/o interseccions de conjunts. Són absolutament essencials per a poder operar durant tot el curs amb les probabilitats.
� [Martorell2001a] p7
� [Leon-Garcia1994] p32-35
PROBLEMA Es pren aleatòriament un punt dins d’un cercle. Quina probabilitat té d’estar més a prop del centre que del perímetre del cercle? Respon per dues maneres de definir com es pren el punt que donin resultats diferents.
� [Martorell2001b]
PROBLEMA Donat un espai de probabilitat, considerem dos successos independents A1 i A2 amb probabilitats p[A1]=p1 i p[A2]=p2. a) Calculeu la probabilitat que algun d’aquests dos esdeveniments no es produeixi. b) Se sap que p1+p2=0.5. Entre quins dos valors estarà compresa la probabilitat anterior?
� [Martorell2001b]

14
RESUM En aquesta sessió hem presentat les diferents definicions de probabilitat, centrant-nos amb l’anomenada teoria axiomàtica de Kolmogorov. D’aquesta, hem presentat les tres propietats bàsiques i la resta que se’n deriven de la definició.
15
SESSIÓ 3: Independència de successos
FITXA DE LA SESSIÓ � Nom: Independència de successos. � Tipus: teòrica � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
PRECEDENTS A la sessió anterior hem presentat la probabilitat d’un succés i n’hem estudiat les propietats. Amb aquesta base estem preparats per a calcular la probabilitat d’un sol resultat, però no per a calcular la probabilitat conjunta de diversos resultats.
OBJECTIUS En aquesta sessió buscarem entendre com calcular la probabilitat que succeeixin a la vegada dos resultats (per exemple, que llançant un dau surti un tres i que llançant un dau surti senar). També presentarem quan el coneixement d’un resultat pot condicionar sobre la probabilitat que succeeixi un altre.
CONTINGUTS En aquesta sessió presentarem el concepte de la probabilitat condicionada i les seves propietats. A partir d’aquí, estudiarem quan podem considerar dos successos independents.
2.3 Probabilitat condicionada
2.3.1 Probabilitat condicionada Tornem a l’exemple de llançar un dau no trucat: la probabilitat que hagi sortit un 3 canvia si sabem que el resultat ha estat senar. En el primer cas, la probabilitat serà d’un sisè, mentre que si sabem que el resultat ha estat senar, la probabilitat serà un terç.
Probabilitat conjunta o condicionada? Suposem que A i B són dos successos possibles. La probabilitat conjunta de A i B és la probabilitat que succeeixin els dos esdeveniments simultàniament:

16
[ ]BAp I Diferent és la probabilitat condicionada de A a B, és a dir, la probabilitat que succeeixi A si sabem que ha tingut lloc B. Escriurem p[A|B], i es pot calcular a partir de la conjunta:
[ ] [ ][ ]Bp
BApBAp ∩=
Propietats de la probabilitat condicionada La probabilitat conjunta p[A|B] compleix les tres propietats que ha de complir una probabilitat. A banda, és interessant notar que la fórmula que relaciona la probabilitat conjunta amb la condicionada es pot escriure de dues maneres simètriques:
[ ] [ ] [ ] [ ] [ ]ABpApBApBpBAp ==∩
Successos disjunts i incompatibles Dos successos disjunts són aquells que no poden esdevenir de manera simultània (per exemple, que tirant un dau surti un 3 i surti parell). Per tant, la probabilitat conjunta és nul·la, i direm que ambdós són incompatibles, perquè en saber que un ha succeït eliminem la possibilitat que ho hagi fet l’altre:
[ ] 0BAp = .
� [Leon-Garcia1994] p48-50 (vegeu especialment l’exemple 2.21)
� [Martorell2001a] p8
Exemple sobre probabilitat condicionada Tenim dins d’una capsa tres cargols i tres femelles. Agafem dues peces (sense reposició). Calculeu quina és la probabilitat d’extreure un cargol i una femella utilitzant el concepte de probabilitat condicionada.
Resolució de l’exemple Definim els següents successos: anomenem B al succés d’extreure una femella com a primera peça (i, per tant, B serà extreure’n un cargol). De la mateixa manera, anomenem C al succés d’escollir una femella com a segona peça. La probabilitat d’extreure un cargol i una femella és igual a:
[ ] ( ) ( )[ ] [ ] [ ] [ ] [ ]53
53
21
53
21BCPBPBCPBPCBCBPfemella 1cargol 1P =+=+=∩∪∩=+

17
2.3.2 Independència de successos Definim A i B successos independents si un no condiciona l’altre. Matemàticament,
[ ] [ ] [ ]BPAPBAP =∩
No hem de confondre la independència amb la incompatibilitat de successos: dos successos independents compleixen
[ ] [ ] [ ][ ] [ ]APBAP
BPAPBAP=
=∩
mentre que dos successos incompatibles
[ ][ ] 0BAP
0BAP=
=∩
� [Leon-Garcia1994] p54-56 (vegeu especialment l’exemple 2.28)
� [Martorell201a] p9
n successos La definició d’independència es pot extrapolar a n successos: {A1,...,An} són successos independents si es compleix
[ ] [ ] [ ] [ ]j1iij1ii AP...APAPA...AAP ++ =∩∩∩ per a qualsevol subconjunt de successos {Ai,...,Aj}. Aquesta noció és més forta que la independència de successos dos a dos: un conjunt de successos en què tots ells siguin independents dos a dos no ha de ser un conjunt de successos independents.
Regla de la multiplicació Aquesta regla ens possibilita el càlcul de probabilitats de la intersecció de successos. Si suposem {A1,...,An} successos compatibles, en general
[ ] [ ] [ ] [ ]1n21n121n21 A...AAAP...AAPAPA...AAP −∩∩∩=∩∩∩

18
2.4 Probabilitat total
2.4.1 Teorema de la probabilitat total Anteriorment hem establert la diferència entre resultat i succés. Aquest teorema ens permetrà calcular la probabilitat d’un resultat compatible amb diversos successos, tot permetent a més una interpretació causa-efecte molt interessant.
Probabilitat total Suposem que el resultat B és compatible amb diferents causes, {A1,...,An}. Per calcular la probabilitat de B (efecte) hem de tenir en compte la probabilitat que tinguin lloc cada un dels successos {Aj} (causes), i la probabilitat que succeïts aquests tingui lloc B (condicionada causa-efecte):
[ ] [ ][ ]∑=
=n
1jjj ABPAPBP
2.4.2 Regla de Bayes Utilitzant la propietat de simetria de la probabilitat condicionada i el teorema de la probabilitat total, s’obté la regla de Bayes:
[ ] [ ] [ ][ ] [ ]∑
=
=n
1iii
jjj
ABPAP
ABPAPBAP
Aquesta regla admet una interpretació molt interessant: fixem-nos que coneixent la probabilitat individual dels successos {Aj} i la condicionada P[B|Aj], som capaços de calcular P[Aj|B]. És a dir, ens podem preguntar succeït un efecte (B) quina és la probabilitat que hagi succeït una certa causa (Aj).
� [Martorell2001a] p10
� [Leon-Garcia1994] p51-54
Exemple sobre la regla de Bayes Per a entendre millor les implicacions de la regla de Bayes, pot ser útil intentar resoldre el següent problema: Un sistema de telecomunicacions emet senyals digitals codificats com 0 i 1. Un estudi estadístic estableix les següents dades: d’una banda, la probabilitat d’emetre un 0 és 0.4. Sabem també que la probabilitat que, quan s’ha emès un 0, es produeixi un error de transmissió i es rebi un 1 és de 0.1. Finalment, la probabilitat que quan s’ha emès un 1 es rebi un 0 és 0.2.
19
Amb aquestes dades, calculeu la probabilitat: a) de rebre un 0; b) que es produeixi un error en la transmissió; c) que s’hagi emès un 0, sabent que s’ha rebut un 1.
� [Martorell2001b]
PROBLEMA Imagineu l’experiment de llançar dues monedes. Anomenem A al succés “surt cara en la primera moneda”, B al “surt cara en la segona moneda” i C al “només surt una cara”. Demostreu com els tres successos són independents dos a dos, però en canvi no només no formen un conjunt de tres successos independents, sinó que fins i tot són incompatibles.
RESUM En aquesta sessió hem estudiat com tenir en compte l’efecte o condicionaments d’uns successos sobre altres, a l’hora de calcular probabilitats. Definida la probabilitat condicionada, hem presentat els conceptes d’independència i incompatibilitat entre successos.
20
21
SESSIÓ 4: Problemes de probabilitat
FITXA DE LA SESSIÓ � Nom: Problemes de probabilitat � Tipus: de problemes � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
� ����������������
PRECEDENTS A les anteriors sessions hem estudiat els conceptes bàsics de la probabilitat. Tenim ja les eines necessàries per al càlcul de la probabilitat de successos i totes aquelles propietats que ens seran útils.
OBJECTIUS En aquesta sessió buscarem assentar coneixements mitjançant problemes de probabilitat. Algunes de les propietats i fórmules desenvolupades fins ara les acabarem d’entendre mitjançant la seva aplicació en casos pràctics.
CONTINGUTS El conjunt de la sessió l’estructurarem a partir d’alguns problemes que resoldrem fins al final, d’altres de la qual n’indicarem les primeres passes, i d’altres que tan sols enunciarem. De tota manera, gran part dels proposats estan resolts en les referències que donem.
2.5 Problemes
2.5.1 Probabilitats simples
Enunciat: temes i examen Suposem que hem de fer l’examen d’una assignatura que té 14 temes diferents, i que tan sols ens n’hem estudiat 5. L’examen consta de dos temes escollits a l’atzar pel professor, dels quals cal contestar-ne 1, el que es vulgui. Calculeu la probabilitat que almenys un dels dos temes que surtin sigui dels que ens hem estudiat, i quants temes ens havíem d’haver preparat com a mínim perquè al probabilitat de superar l’examen sigui 0.5.

22
NOTA: suposem que si cau un tema que ens hem estudiat, el sabem contestar correctament.
Resolució (i): aprovar l’examen Les diferents possibilitats que tenim són les combinacions de 14 temes agafats de 2 en 2:
91!12!2
!142
14==⎟⎟
⎠
⎞⎜⎜⎝
⎛
En canvi, ens en sortirem si surten dos temes que sabem (combinacions de 5 temes agafats de 2 en 2) o bé un que sabem i l’altre que no (5x9):
559525
=×+⎟⎟⎠
⎞⎜⎜⎝
⎛
Per tant, la probabilitat que surti almenys un dels dos temes estudiats val 55/91, és a dir 0.60.
Resolució (ii): número mínim per aprovar Si el nombre de temes que preparem és n, les diferents possibilitats que tenim són
)n14(n2
)1n(n)n14(n2n
−+−
=−+⎟⎟⎠
⎞⎜⎜⎝
⎛
Per tant, busquem aquell n que faci aquesta quantitat més gran o igual a la meitat de 91: probabilitat superior a 0.5 de superar l’examen. El valor mínim és n=4.
Enunciat: sistemes d’alarma Un aparell detector de gas té una probabilitat 0.4 de detectar la seva presència. Quants aparells s’han d’instal·lar en un sistema de seguretat per assegurar que la probabilitat de detecció sigui superior a 0.995?
Resolució (i): successos complementaris Demanar un 0.995 de probabilitat de funcionament del sistema equival a demanar que 0.005 sigui la probabilitat que no funcioni. Si suposem n detectors, estem demanat que cap dels n no funcioni:
[ ] 0.6 funcioni no idetector el queat probabilitDP i == [ ] 005.0995.01D....DDDP n321 =−=∩∩∩∩

23
Resolució (ii): successos independents Suposem que el fet que un detector funcioni o no, no implica res sobre que ho faci un altre. És a dir, els successos són independents:
( ) ( )( ) ( ) nn21n21 6.0DP...DPDPD....DDP ==III
Igualant aquesta probabilitat a 0.005:
37.106.0log
005.0logn6.0logn005.0log6.0005.0 n ==⇒⋅=⇒=
És a dir, necessitem com a mínim 11 detectors.
2.5.2 Probabilitat condicionada
Enunciat: les bombetes i les caixes Tenim tres caixes: C1, C2, C3. C1 conté 10 bombetes de les quals 4 són defectuoses. C2 conté 6 bombetes de les quals 1 és defectuosa. C3 conté 8 bombetes de les quals 3 són defectuoses. Triem a l'atzar una caixa i després en traiem una bombeta. Quina és la probabilitat que la làmpada sigui defectuosa?
Resolució (i): successos possibles Definim Di com el succés corresponent a trobar una bombeta defectuosa a la caixa ‘i’. Les probabilitats de trobar una bombeta defectuosa en cada caixa són:
[ ]
[ ]
[ ]83Dp
61Dp
52Dp
3
2
1
=
=
=
Com construiríem la probabilitat per a totes les caixes?
Resolució (ii): probabilitat condicionada Per tant, és possible que sigui defectuosa per a qualsevol de les caixes. Si considerem que escollir entre elles és equiprobable:
[ ] [ ] [ ]360113DPcaixaPdefectuosap
icaixaii == ∑

24
Enunciat: percentatges i proveïdors Una empresa rep el 70% d'un determinat tipus de peça del proveïdor A, i la resta del B. A té un 2% de producció defectuosa i B un 12%. Es guarden les peces al magatzem, sense poder-ne saber la procedència. Si s'extrauen dues peces i en resulta una de bona i l'altra de dolenta, quina és la probabilitat que siguin cada una de cada proveïdor?
Resolució (i):probabilitats totals Utilitzant el teorema de la probabilitat total, podem calcular la probabilitat que una peça sigui bona o dolenta, independentment del proveïdor:
[ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]BbonaPBPAbonaPAPbonaP
BdolentaPBPAdolentaPAPdolentaP
+=
+=
Com utilitzem Bayes per calcular la probabilitat que una sigui de cada proveïdor?
Resolució (ii): Bayes La probabilitat que sigui una de cada proveïdor es calcula com:
( ) ( )[ ]bonadolentadolentabona BABAPP ∩∪∩= i amb la regla de Bayes:
( ) ( ) ( )( )
( ) ( ) ( )( )
( ) ( ) ( )( )
( ) ( ) ( )( )
277.095.0
3.088.0bonaP
BPbona|BPB|bonaP
28.005.0
7.002.0dolentaP
APdolenta|APA|dolentaP
72.005.0
3.012.0dolentaP
BPdolenta|BPB|dolentaP
7221.095.0
7.098.0bonaP
APbona|APA|bonaP
=⋅
=⋅
=
=⋅
=⋅
=
=⋅
=⋅
=
=⋅
=⋅
=
per la qual cosa, la probabilitat que calculem val:
5977.0277.028.072.07221.0P =⋅+⋅=
PROBLEMA Una urna té b boles blanques i n negres. Traiem una bola a l'atzar, la retornem a l'urna i hi afegim k boles del mateix color. Repetim aquest procés tres vegades. a) Calculeu la probabilitat que la primera bola hagi sortit blanca, si la segona també ha sortit blanca. b) Demostreu que en cadascuna de les extraccions, la probabilitat de treure una bola blanca és la mateixa.
25
PROBLEMA Un secretari col·loca quatre cartes en quatre sobres a l’atzar. Calculeu la probabilitat que: a) Exactament tres cartes hagin estat ensobrades correctament. b) Les quatre cartes hagin estat ensobrades correctament. c) Almenys un a carta hagi estat ensobrada correctament. d) Cap carta no hagi estat ensobrada correctament.
RESUM En aquesta sessió hem presentat diferents problemes resolts i proposats per tal de veure l’aplicació de bona part dels conceptes que hem desenvolupat fins ara. Amb aquestes eines podrem enfrontar-nos a conceptes més complexes de variables aleatòries.

26
27
SESSIÓ 5: Conceptes i tipus de V.A. en 1-D
FITXA DE LA SESSIÓ � Nom: Conceptes i tipus de V.A. en 1-D � Tipus: teòrica � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS Fins a aquesta sessió hem estudiat tot allò necessari sobre la probabilitat de successos. Amb les propietats presentades i els teoremes de la probabilitat total, la regla de Bayes, etc., som capaços de realitzar càlculs prou complexes de probabilitats.
OBJECTIUS En aquesta sessió, l’objectiu és presentar què són i com es treballa amb variables aleatòries, i el perquè del seu ús. Igualment, exposarem els diferents tipus de variables que utilitzarem per modelar els problemes, intentant entendre el perquè dels diferents enfocaments i funcions utilitzades en cada cas.
CONTINGUTS En primer lloc, presentarem les propietats bàsiques d’un variables aleatòria, i en direm tot allò que puguem sense particularitzar. Després, exposarem els diferents tipus de V.A. en funció de les característiques del problema, i aquelles quantitats utilitzades per a treballar en el càlcul de probabilitats.
3 variables aleatòries en 1-D
3.1 Conceptes
3.1.1 Definició i propietats d’una variable aleatòria En aquest apartat introduirem la definició i els primers conceptes relatius a una variable aleatòria, que ja no ens abandonarà fins a la fi d’aquest curs.
28
Concepte de V.A. Una variable aleatòria és una aplicació de l’espai mostral a l’espai dels reals,
)(X:X
ω→ω
ℜ→Ω
és a dir, a cada succés de l’espai mostral (Ω) li correspon un valor real. Quantifiquem l’espai de successos de tal manera que l’anti-imatge d’un cert interval real sigui un conjunt de successos.
� [Martorell2001a] p11
� [Leon-Garcia1994] p85-p86 (vegeu especialment les figures 3.1 i 3.2)
Funció de distribució Com cada valor de X equival a l’ocurrència d’un cert succés, necessitem una funció per poder estudiar la probabilitat que X prengui aquell valor (que esdevingui aquell succés). Definim la funció de distribució com la funció que parla de la probabilitat acumulada:
[ ]xXP)x(FX ≤= i que ha de complir una sèrie de propietats com a funció. A causa del seu significat (probabilitat acumulada), la funció de distribució ens permet calcular la probabilitat que una variable X estigui en un cert interval (és a dir, que esdevinguin un cert conjunt de successos):
[ ] )a(F)b(FbXaP XX −=≤<
� [Martorell2001a] p11-p12
� [Leon-Garcia1994] p87-p88
3.2 Classificació de variables aleatòries
3.2.1 Variables aleatòries discretes Particularitzant, les variables aleatòries discretes són aquelles variables aleatòries que poden prendre un conjunt finit de valors (per exemple, {-1,0,1}) o un conjunt infinit numerable de valors (per exemple, {1,2,...,n,...}).
Funció de probabilitat Definim la funció de probabilitat, com aquella funció que parla de la probabilitat que la variable aleatòria X prengui el valor xi:
[ ]iiX xXP)x(f ==

29
Aquesta funció, com tota probabilitat ha d’estar fitada inferior i superiorment:
1)x(f0 X ≤≤ i la probabilitat de tots els valors possibles ha de sumar 1:
1)x(fix
iX =∑
� [Martorell2001a] p12
Funció de distribució Per a variables discretes, la funció de distribució es particularitza de la forma:
[ ] [ ]∑≤
==≤=xx
iXi
xXPxXP)x(F
Aquesta funció és constant entre dos valors consecutius possibles de la variable X:
cnt)x(FX = per x pertanyent a l’interval
( )1ii x,x + i té discontinuïtats de salt en cada valor possible de X:
)x(f)x(F)x(F iXiXiX =− −+
� [Martorell2001a] p12-p13
� [Leon-Garcia1994] p89 (figura 3.3)
3.2.2 Variables aleatòries contínues Les variables aleatòries contínues són aquelles que modelen problemes en què es poden donar un conjunt infinit no-numerable de valors diferents. X és una variable aleatòria contínua si i només si la funció de distribució és contínua i la seva derivada existeix i és contínua excepte en un número finit de punts.
Funció densitat de probabilitat En variables contínues, no té sentit que ens preguntem per la probabilitat que la variable X prengui un valor x en concret. Per això treballem amb la funció densitat de probabilitat, que es defineix a partir de la funció de distribució de distribució:

30
dx)x(dF
)x(f XX =
A diferència de les variables discretes, ara la funció f no té fita superior:
0)x(fX ≥ però la probabilitat segueix sumant la unitat; és a dir,
1)x(dxfX =∫∞
∞−
� [Martorell2001a] p13
� [Leon-Garcia1994] p95
Càlcul de probabilitats A partir de la definició, es possible relacionar la densitat de probabilitat amb la funció de distribució:
[ ] ∫∞−
==≤x
XX )t(dtf)x(FxXP
i d’aquí plantejar quina equació utilitzarem per calcular probabilitats en variables contínues:
[ ] )a(F)b(F)x(dxfbXaP XX
b
aX −==≤< ∫
És important que tinguem clar que, malgrat la notació parli sempre de la funció
)x(fX no és el mateix per al cas de variables discretes que per al cas de variables contínues. De fet, la interpretació d’aquesta funció com a densitat de probabilitat la podem veure a partir de la relació:
[ ]h
2/hxX2/hxP0h
lim)x(f X
+≤≤−→
=
� [Martorell2001a] p14
� [Leon-Garcia1994] p94-95 (interessant la figura 3.6)
3.2.3 Variables aleatòries mixtes Com a últim tipus, parlem de les variables aleatòries mixtes.

31
Concepte Un cas intermedi és aquell en què la variable X es comporta com una V.A. contínua excepte en un conjunt discret de punts xi, en els quals la probabilitat d’ocurrència és no-nul.la. Aquest fet es reflecteix en la seva funció de distribució, que és la combinació entre una V.A. contínua i una de V.A. discreta:
)x(F)1()x(F)x(F C,XD,XX α−+α= amb α un valor real entre 0 i 1. La manera més senzilla de veure-ho és probablement sobre la gràfica de la funció de distribució, en què el caràcter del conjunt de punts {xi} es manifesta en discontinuïtats de salt.
� [Martorell2001a] p14
� [Leon-Garcia1994] p93
Exemple Un bon exemple el dóna la variable X definida com la quantitat de pluja recollida en un observatori per dia (com a cas particular, però el model té moltes altres aplicacions). La funció de distribució val
⎪⎩
⎪⎨⎧
≥−
<= − 0xe
211
0x0)x(F xX
La discontinuïtat ens apareix just en x=0: la probabilitat que no plogui és
[ ] [ ]21)x(F)x(F0XP10XP XX =−=>−== −+
diferent de zero, la qual cosa indica el caràcter de variables discreta d’aquest valor concret de X.
PROBLEMA La funció definida a continuació és la funció de distribució de la variable T, que mesura l’instant de temps en què s’ha produït un cert fenomen:
⎪⎩
⎪⎨
⎧
≥
<≤
<
=
τ
ττ
tttt
tFT1
0/00
)(
a) Dibuixeu-la i justifica quin tipus de variable aleatòria és. b) Calculeu )(tfT i comenta quina distribució creus que segueix la variable T. c) Calculeu la probabilitat que el

32
fenomen s’hagi produït en l’interval de temps [ ]2/,3/t ττ∈ . És coherent amb allò que heu suposat a l’apartat anterior?
PROBLEMA En un exemple d’aquesta secció, hem proposat la funció
⎪⎩
⎪⎨⎧
≥−
<= − 0xe
211
0x0)x(F xX
com a funció de distribució de la variable X que representa una pluviometria. a) Dibuixeu-la i identifiqueu el caràcter que té X com a variable mixta. b) Calcula la probabilitat que plogui però menys d’un litre. c) De quines dues funcions de distribució pot ser superposició la nostra )x(FX ?
RESUM Hem presentat els diferents tipus de variable aleatòria que utilitzarem d’ara endavant per al modelatge dels fenòmens aleatoris. Per a cada variable, hem presentat les funcions que la determinen i les seves propietats.
33
SESSIÓ 6: Models de distribucions
FITXA DE LA SESSIÓ � Nom: Models de distribucions � Tipus: teòrica � Format: no presencial � Dedicació: 2.5 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
PRECEDENTS En l’anterior sessió hem presentat els diferents tipus de variables aleatòries (discreta, contínua i mixta) i en cada cas hem presentat les funcions que caracteritzen la distribució i el comportament de cadascuna d’aquestes variables.
OBJECTIUS Existeixen molts fenòmens en què apareixen magnituds amb comportament aleatori, molts d’ells aparentment no relacionats. En aquesta secció presentarem les funcions de probabilitat (o densitat de probabilitat) i de distribució associades a diferents variables aleatòries, i discutirem per què apareixen en cada cas.
CONTINGUTS En aquesta sessió veurem un apartat del tema actual en què estudiarem els principals models de distribucions per variables discretes i contínues.
3.3 Models de distribucions
3.3.1 Models per v.a. discretes Les variables aleatòries discretes apareixen sovint en experiments en què una operació de comptatge hi és involucrada. El senzill experiment de llançar una moneda (una o n vegades) i comptar el nombre de vegades que surt un cert resultat ens servirà com a referència per a exposar diferents models.

34
Distribució uniforme Donada una variable X amb valors possibles {x1,x2,...,xn}, aquesta segueix una distribució uniforme si la probabilitat per a qualsevol d’aquests valors és la mateixa. És a dir,
[ ]n1xP i =
� [Martorell2001a] p15
Distribució de Bernouilli Aquest model ens és útil per caracteritzar aquells experiments en què ens preocupa saber si un succés es produeix o no. La nomenclatura habitual ens porta a parlar d’”èxit” si aquest es produeix, i de “fracàs” si no és així.
[ ][ ] p1qfracàsP
pèxitP−==
=
� [Martorell2001a] p15
Distribució binomial Si el model de Bernoulli és apte per a estudiar el simple experiment de tirar una moneda, la distribució binomial caracteritza els resultats possibles de repetir aquest experiment diverses vegades. Així, definim X com el número d’èxits obtinguts en la repetició d’n experiments de Bernoulli independents.
[ ] knk )p1(pkn
kXP −−⎟⎟⎠
⎞⎜⎜⎝
⎛==
La forma de la distribució és simètrica respecte de k = np.
� [Leon-Garcia1994] p104 (vegeu figura 3.8)
� [Martorell2001a] p15
Distribució de Poisson En molts casos, estarem interessats en comptar el nombre de vegades que es produeix un succés en un cert interval de temps, amb la particularitat que el nombre de vegades que es pot produir és molt elevat (n tendint a ∞), amb una probabilitat de produir-se molt petita (p tendint a 0). Utilitzar el modelatge binomial per a aquest procés no és còmode, i per això ens plantegem a què tendeix la distribució binomial en les condicions de n i p descrites. Si definim el paràmetre de la distribució com np=λ

35
direm que X segueix una distribució de Poisson de paràmetre λ amb una funció de probabilitat:
[ ]!k
ekXPkλ
== λ−
És interessant que ens adonem del fet que una variable de Poisson, igualment que una binomial o Bernouilli, pren sempre valors naturals.
� [Leon-Garcia1994] p107 (vegeu figura 3.10)
� [Martorell2001a] p16
3.3.2 Models per v.a. contínues Estrictament parlant, estem limitats sempre a mesures de precisió finita, i per tant tota variable aleatòria hauria de ser tractada com a discreta. Ara bé, hi ha diverses raons per utilitzar variables contínues: en general, són més fàcils de tractar analíticament i força distribucions discretes tendeixen a contínues conegudes en el límit.
Distribució uniforme Amb aquesta distribució modelem el cas en què tot valor de X té igual probabilitat de realitzar-se. Per tant, si X pot prendre valors en l’interval [a,b] la densitat de probabilitat serà una constant que per raons de normalització valdrà l’invers de la longitud de l’interval:
[ ]⎪⎩
⎪⎨⎧
∈−=
xaltres 0
ba, x)ab(
1)x(fX
La funció de distribució és lineal en l’interval de valors possibles per X.
� [Papoulis1980] p117
� [Martorell2001a] p16
Distribució normal o gaussiana Com demostrarem prou més endavant, aquesta distribució apareix quan un fenomen és degut a un gran nombre de causes, cadascuna d’elles participant-hi amb un petit efecte. En general, direm que la variable X segueix una distribució gaussiana de mitjana μ i desviació σ. Ambdues magnituds caracteritzen completament el comportament de la variable, i la seva definició la sistematitzarem més endavant (en direm esperança i variància). La funció densitat de probabilitat val:
2
2
2
)x(
X e21)x(f σ
μ−−
σπ=

36
que és una funció contínua, simètrica respecte de la mitjana, que tendeix a zero en els seus extrems i que presenta un màxim en x = μ. Un inconvenient és que aquesta funció no té primitiva, i per tant no és possible calcular analíticament el valor de la funció de distribució en un punt, com tampoc la probabilitat d’un interval. Per resoldre aquest problema, treballem amb els valors tabulats del que definim com a funció d’error:
∫∞−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
x tdtxfer2
exp 21)(
2
π
� [Leon-Garcia1994] p114 (vegeu figura 3.13)
� [Martorell2001a] p16
Distribució exponencial negativa Aquesta distribució apareix de manera natural en l’estudi del temps de vida d’un sistema o del temps entre la realització consecutiva de dos successos. El fenomen ve caracteritzat per un paràmetre λ segons la funció de densitat:
⎩⎨⎧
>
<= − 0 x
0 x 0)( xX exf λλ
Sovint diem que aquesta distribució no té memòria. És a dir, no importen els valors
inicial (x1) o final (x2) de l’interval estudiat, sinó només la seva longitud (x2-x1).
� [Leon-Garcia1994] p112-p113
� [Martorell2001a] p18
PROBLEMA Demostreu com la funció de probabilitat d’una binomial (n,p) tendeix a una funció de Poisson de paràmetre
np=λ quan a la vegada es produeix
0pn→
∞→
PROBLEMA En un canal de comunicació, la probabilitat que hi hagi error en la transmissió d’un bit és de 0.001. Suposant una trama de 1000 bits, calculeu la probabilitat que hi hagi 3 errors o més, utilitzant un model binomial i un de Poisson. Comenteu-ne el resultat.
37
RESUM En aquesta sessió hem presentat els tipus de distribucions més habituals que segueixen les variables aleatòries, tan discretes com contínues. De cada cas, hem presentat les funcions que caracteritzen aquesta distribució i algunes de les seves propietats.

38
39
SESSIÓ 7: Transformacions de variables aleatòries
FITXA DE LA SESSIÓ � Nom: Transformacions de variables aleatòries � Tipus: teòrica � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS Fins ara hem presentat les funcions que caracteritzen una variable aleatòria i els diferents tipus que n’hi ha, bé sigui pel caràcter com a variable (discreta, contínua o mixta), o pels exemples més típics que ens podem trobar (binomial, Poisson, normal,...).
OBJECTIUS L’objectiu d’aquesta sessió és establir les bases perquè siguem capaços de poder treballar amb funcions de variables aleatòries. Treballar amb el que anomenarem transformacions de variables.
CONTINGUTS Quan transformem un variable hem de ser capaços de trobar les seves només funcions (de probabilitat o densitat de probabilitat, o de distribució) a partir de les referides a la variable de partida i de la transformació. La manera d’aconseguir-ho és el que treballarem en aquest tema.
3.4 Transformacions de variables aleatòries
3.4.1 Transformacions per V.A. discretes Suposem una variable discreta X que es transforma en una Y mitjançant una funció de transformació h:
)X(hY =

40
En general, aquesta Y és també una variable aleatòria. Fixem-nos que la transformació la podem interpretar senzillament com que estem tractant amb una V.A. que anomenem Y, i que és funció d’una altra que anomenem X.
Funcions de distribució i probabilitat La funció de distribució es dedueix del mateix concepte de probabilitat acumulada: avaluar-la per la variable Y en un valor y voldrà dir tenir en compte tots aquells valors de X que en transformar-los per la funció h donen un valor de Y menor que aquest y:
[ ] [ ]∑ ≤==≤=
ixiiY y)x(h/xXPyYP)y(F
Per tant, la podem calcular a partir de la funció de probabilitat de X. De manera molt similar som capaços de calcular la funció de probabilitat de la nova variable Y:
[ ] [ ]∑ =====
ixiiY y)x(h/xXPyYP)y(f
� [Leon-Garcia1994] p119-p121
� [Martorell2001a] p18
Exemple sobre transformació de V.A.D. Un exemple interessant és intentar resoldre el següent problema: sigui X una variable aleatòria de Poisson de paràmetre λ. Definim una nova variable aleatòria Y de la manera següent:
senar és X si , 1
zero) (o parell és X si , 1 Y
⎩⎨⎧
−=
Determineu la funció de probabilitat de la v.a. Y en funció del paràmetre λ.
Resolució (i): Variable de Poisson Com que la variable original X és una V.A. de Poisson de paràmetre λ, les seves funcions de probabilitat i distribució són:
( ) ( )
( ) ( ) ( ) ( )nx , ifkXPkF
,...2,1,0k , !k
cekXPkf
k
0ixX
k
X
≤=≤=
=⋅===
∑=
λ−

41
Resolució (ii): Transformació La transformació que hem definit porta al valor 1 totes les X parelles, i a –1 totes les senars. Per tant, per calcular la probabilitat que Y sigui 1, hem de tenir en compte tots els valors parells de X. A partir de la sèrie de Taylor de l’exponencial, obtenim
( ) ( )( ) ( ) 2
e12
eee!k2
e!k2
ekF1f2
0k
k2
0k
k2
parell kXy
λ−λ−λ+λ−
≥
λ−
=
λ− +=
+⋅=
λ⋅=
λ⋅== ∑∑
i anàlogament
( ) ( )( )
( )
( ) 2e1
2eee
!1k2e
!1k2ekF1f
2
0k
1k2
0k
1k2
senar kXy
λ−λ−λ+λ−
≥
+λ−
=
+λ− −
=−
⋅=+
λ⋅=
+
λ⋅==− ∑∑
� [Martorell2001b]
3.4.2 Transformació de V.A.C. Per al cas de variables contínues, podem suposar el mateix punt d’inici, és a dir una funció h que transformi la variable X en una nova variable Y:
)X(hY = Com veurem més endavant, és interessant que la funció que transforma les variables sigui contínua i derivable en tot el seu domini excepte un número finit de punts.
Cas general D’una manera molt semblant al cas de variables discretes, partint de la definició de funció de distribució com a probabilitat acumulada podem dir:
[ ] [ ])y,(hXPyYP)y(F 1Y −∞∈=≤= −
És a dir, hem de tenir en compte tots aquells valors de X en què la Y retornada per la transformació estigui en un interval de valors menors que y. A partir d’aquesta, per la seva definició és possible trobar la densitat de probabilitat:
( ) ( )
( )⎪⎩
⎪⎨
⎧
∉
∈==
−
Xhy0
Xhydydx)y(hf
dy)y(dF
)y(f1
XYY
� [Leon-Garcia1994] p121-p122 (especialment exemple 3.23 i figura 3.16)
� [Martorell2001a] p19
Casos particulars Un cas especial apareix quan existeix algun punt xi en què

42
0)x('h i = De fet, suposem que n’hi poden haver un número finit. En aquests punts la funció densitat de probabilitat no és possible calcular-la com s’ha exposat anteriorment, perquè la derivada de la transformació inversa divergeix. Això tampoc és un problema, perquè estem parlant d’un número finit de punts, i per tant no afectarà el càlcul de probabilitats. Sovint farem senzillament:
( ) ( )
( )⎪⎩
⎪⎨
⎧
=
≠∈=
−
0x'hK
0)x('h/Xhydydx)y(hf)y(f
1X
Y
Un altre cas important apareix quan la funció h(X) de transformació no és monòtona: diferents valors de X porten a un mateix valor de la variable Y. En aquest cas és suficient utilitzar l’expressió general sumada per tots els valors de X possibles:
( )( )⎪
⎩
⎪⎨
⎧
∉
== ∑
−
Xhy0
y)x(h/xdydx)y(hf
)y(f iix
1X
Yi
� [Leon-Garcia1994] p123-p126 (especialment exemple 3.25 i figura 3.17)
� [Martorell2001a] p19
PROBLEMA Sigui la variable discreta X que pot prendre els valors {-1,0,1} amb probabilitats 0.1, 0.3 i 0.6, respectivament. Si definim la variable Y com el mòdul de X, calcula, dibuixa i compara les funcions de probabilitat i de distribució de les dues variables.
PROBLEMA Sigui la variable X distribuïda uniformement entre [-π, π]. Definim la variable Y de la forma següent:
)Xsin(aY = en què a és un paràmetre. a) Calculeu la funció densitat de probabilitat de X. b) Calculeu el mateix sobre la variable Y, amb l’expressió donada en aquesta sessió. c) Calculeu la funció de distribució de Y fent servir la seva definició com a probabilitat (no integrant la funció densitat), i deriveu-la per comprovar que dóna la funció densitat.
RESUM En aquesta sessió ens hem plantejat de quina manera calcular les funcions que em caracteritzen una variable aleatòria que és funció d’una altra, de la qual coneixem totes les seves funcions.
43
SESSIÓ 8: Característiques d’una variable aleatòria
FITXA DE LA SESSIÓ � Nom: Característiques d’una variable aleatòria � Tipus: teòrica � Format: no presencial � Durada: 2.5 hores � Material:
o ������������ ����
� ���������������
� ����������������
o �������������������������
� � ��!�� ��"���
PRECEDENTS Anteriorment hem exposat els diferents tipus de variable aleatòria (discreta, contínua i mixta) i algunes de les principals distribucions que modelen el seu comportament. Hem definit també les funcions que caracteritzen un determinada distribució i donen informació sobre la probabilitat d’un esdeveniment.
OBJECTIUS A partir de les funcions que caracteritzen les variables és possible calcular magnituds observables, com l’esperança o la dispersió. En aquesta sessió analitzarem com es calculen les principals magnituds característiques d’una variable aleatòria (esperança i variància), i veurem com són casos particulars d’allò que anomenem moments. Finalment, estudiarem la informació que donen els moments sobre la distribució.
CONTINGUTS En aquesta sessió definim l’esperança, la variància i els moments, així com la informació que sobre la distribució de la variable aporten.
3.5 Característiques d’ una variable aleatòria
3.5.1 Esperança matemàtica Sovint no tenim un model del sistema que ens permeti conèixer la distribució de la variable. A partir de valors de la variable podem construir una sèrie de magnituds que ens parlin de la posició, dispersió o forma de la variable aleatòria. L’esperança és el principal resum d’una distribució estadística.

44
Càlcul de l’esperança L’esperança E[ ] d’una variable aleatòria discreta X que pot prendre valors {x1,x2,...,xn} amb probabilitat {p1,p2,...,pn} és igual a la suma dels valors possibles ponderats amb la probabilitat que correspon a cada un d’ells:
[ ] ∑=
=n
1iii )x(pxXE
Si la variable és contínua, l’expressió és
[ ] ∫∞
∞−
= )x(f x dxXE X
� [Leon-Garcia1994] p126-p130
� [Martorell2001a] p20
Propietats de l’esperança L’esperança dóna més o menys informació sobre la distribució de les dades en funció de si aquestes estan més o menys disperses. A més, és un operador lineal:
[ ] [ ][ ] [ ] [ ]YEXEYXE
XaEaXE+=+
=
i és possible calcular-lo per a qualsevol funció de la variable X.
� [Leon-Garcia1994] p130-p132
� [Martorell2001a] p20
3.5.2 Variància La variància, Var[X], dóna una idea de la dispersió dels valors de X al voltant de la mitjana o esperança.
Càlcul de la variància La variància de X es defineix com l’esperança del quadrat de la diferència entre X i el seu valor mitjà; és a dir:
[ ] [ ]( )[ ]2XEXEXVar −= És una magnitud sempre positiva, i sovint es calcula com
[ ] [ ] [ ]22 XEXEXVar −=
� [Leon-Garcia1994] p133-p134
� [Martorell2001a] p20-p21

45
Desviació típica o estàndard Aquesta magnitud, a la qual sovint ens hi referim també com a “desviació”, dóna una mesura de l’amplada, en sentit estadístic, de la distribució i es calcula com l’arrel quadrada de la variància:
[ ] [ ]XVarX =σ
3.5.3 Moments d’una variable aleatòria Tant l’esperança com la variància no són més que casos particulars del que anomenem moments.
Definició i propietats En general, definim moment d’ordre k, αk, a l’esperança de la potència k de la variable:
[ ]kk XE=α
i els moments centrals, μk, anàlogament però centrats a l’esperança de X:
( )[ ]kXk XE μ−=μ
Els dos tipus de moments estan relacionats entre ells i alguns d’ells són nuls quan es donen certes situacions de simetria en la distribució.
� [Papoulis1980] p168-p170
� [Martorell2001a] p20-p21
Interpretació geomètrica A banda d’esperança i variància, el tercer i quart moment també tenen una certa interpretació geomètrica. A partir d’aquestes dues quantitats, podem definir el coeficient d’asimetria i el coeficient de curtosi.
� [Martorell2001a] p21
PROBLEMA Suposem que X és una variable aleatòria contínua distribuïda simètricament respecte del seu valor mitjà o esperança. Demostra que els moments centrals d’ordre senar són sempre nuls.
46
RESUM En aquesta sessió hem presentat els conceptes d’esperança i variància, així com la seva generalització en els moments. També hem estudiat la manera de calcular cada una d’aquestes magnituds i la seva interpretació geomètrica sobre la distribució.
47
SESSIÓ 9: Funció característica
FITXA DE LA SESSIÓ � Nom: Funció característica � Tipus: teòrica � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS Fins ara hem presentat aquelles funcions que caracteritzen les variables aleatòries, d’una banda, i les magnituds que ens donen una idea sobre el seu comportament, de l’altra. No obstant això, aquests dos conceptes els hem treballat en diferents sessions i de manera independent.
OBJECTIUS L’objectiu d’aquesta sessió és donar una idea de consistència al tema de la variable aleatòria en una dimensió, i veure que conceptes presentats en un principi de manera independent (com la funció densitat de probabilitat o l’esperança d’una variable) tenen realment alguna relació.
CONTINGUTS La relació de què parlem entre els conceptes exposats fins el moment la donarà la funció característica. Prèviament, però, treballarem els teoremes de Markov i Txebitxev, que donen informació sobre què podem calcular a nivell de probabilitats amb els moments d’ordre més baix.
3.6 Càlcul de probabilitats i funció característica
3.6.1 Càlcul de probabilitats L’esperança, la variància i en general els moments d’una variable aleatòria, ens donen informació sobre la situació, forma, etc., dels diferents valors que pot prendre una variable aleatòria. Ara bé, si volem calcular la probabilitat que aquesta variable prengui uns determinats valors hem d’anar a buscar les funcions que la caracteritzen.

48
Teorema de Markov A partir de l’esperança d’una variable, aquest teorema ens permet fitar la probabilitat que la variable prengui uns valors més grans que un paràmetre K. Per variables aleatòries X que prenguin valors només positius o nuls:
[ ] [ ]KXEKXP ≤≥
Desigualtat de Txebitxev Si a més de l’esperança també coneixem la dispersió de X, podem construir una nova fita més acurada que ens parla de la probabilitat que la variable X s’allunyi de la mitjana més que una certa quantitat K. Per qualsevol variable X,
[ ] [ ]2X
KXVarKXP ≤≥μ−
� [Leon-Garcia1994] p137-p138
� [Martorell2001a] p22
Exemple del càlcul de probabilitats El nombre mitjà de persones que van a un local és 1000 amb una desviació típica de 20. Sense conèixer la distribució d’aquesta variable aleatòria, calculeu: quin és el nombre de cadires necessari per a assegurar que tots els assistents podran asseure's amb una probabilitat de 0.75?
Resolució de l’exemple Si apliquem la desigualtat de Txebitxev (ja que coneixem esperança i variància de la variable que indica el nombre de persones),
[ ] [ ] 40h 75.0h201h100xP
h20h100xP
2
2
2
2=⇒=−≥≤−⇒≤≥−
i per tant n’hi haurà prou amb 1040 cadires.
3.6.2 Funció característica Amb les relacions de Markov i Txebitxev hem vist com amb el coneixement dels moments d’ordre més baixos som capaços de calcular fites per probabilitats. La funció característica ens demostrarà com conèixer tots els moments d’una variable vol dir caracteritzar-la totalment; és a dir, és equivalent a conèixer la funció densitat de probabilitat.

49
Definició La funció característica és una funció d’un paràmetre t definida com
[ ]itxX eE)t( =ϕ
Per exemple, si X és una variable contínua ho calcularem com
∫∞
∞−
=ϕ )x(fdxe)t( Xitx
X
mentre que si és una variable discreta, el càlcul de l’esperança que defineix la funció característica ve donat per l’expressió
[ ]∑=ϕ
k
k
xk
itxX xPe)t(
� [Leon-Garcia1994] p145-p146
� [Martorell2001a] p22
Propietats de la funció característica La primera de les propietats de la funció característica interessant és la seva relació amb la funció densitat de probabilitat: si la variable és contínua, la densitat de probabilitat és la transformada de Fourier de la funció característica, mentre que si és discreta la funció característica es pot desenvolupar com a sèrie de Fourier amb
)x(f kX com a coeficients. D’altra banda, així com la funció característica es relaciona amb la densitat de probabilitat mitjançant transformacions de Fourier, també es relaciona amb els moments de la variables: la funció característica admet un desenvolupament en sèrie de moments
∑∞
=
α=ϕ0n
n
n
X !n)it()t(
i aquesta expressió ens mostra com calcular un moment qualsevol a partir de la funció característica:
0t
X)n(
nn dt)t(d
i1
=
ϕ=α
amb la qual cosa veiem que si sabem la funció característica podem calcular fàcilment l’esperança, variància, etc., de la distribució de X.
� [Leon-Garcia1994] p146-p147
� [Martorell2001a] p22-p23
50
PROBLEMA Un club d'excursionistes prepara la pujada a un cim de gran dificultat. L'experiència demostra que la probabilitat d'abandonar en el n-èssim dia d'escalada és n2− (n>0). a) Determineu la funció característica de la variable que compta el nombre de dia en què abandona un excursionista. b) Determineu la mitjana i la variància d'aquesta variable.
PROBLEMA En el problema de l’escalador, suposem que es triga 6 dies a arribar al cim (si abandonen al sisè dia o abans, no arriben). D’aquesta manera, calculeu la probabilitat que un escalador arribi al cim. Feu-ho utilitzant la funció de probabilitat donada en el problema anterior, utilitzant només la mitjana i utilitzant la mitjana i la variància (teoremes de Markov i de Txebitxev).
RESUM Amb aquesta sessió hem tancat de manera consistent la teoria referent a les variables aleatòries en una dimensió. Amb les desigualtats presentades (Markov i Txebitxev), podem calcular fites per la probabilitat encara que coneguem només alguns moments de la variable. Finalment, amb la funció característica relacionem la informació dels moments amb la de les funcions que caracteritzen la variable.
51
SESSIÓ 10: Problemes de variables aleatòries en una dimensió
FITXA DE LA SESSIÓ � Nom: Problemes de variables aleatòries en una dimensió � Tipus: de problemes � Format: semi presencial � Durada: 4 hores � Material:
o ������������ ����
� ����������������
� ���������������
� ����������������
PRECEDENTS Fins a aquest moment hem treballat tots els conceptes bàsics necessaris relatius a la probabilitat, i hem presentat totes aquelles nocions de variables aleatòries en una dimensió que ens han de permetre modelar els fenòmens no deterministes.
OBJECTIUS L’objectiu d’aquesta sessió és presentar un conjunt de problemes i exercicis amb els quals aclarir conceptes i resoldre dubtes que puguin haver sorgit en aquest tema de variable aleatòria en una dimensió.
CONTINGUTS El contingut de la sessió el formen problemes i exercicis resolts alguns, indicats d’altres i només plantejats uns tercers. Els problemes intenten recórrer tots aquells aspectes més interessants i sobre els quals poden haver quedat ombres de la variable aleatòria.
3.7 Problemes de V.A. en 1D
3.7.1 Problemes sobre distribucions
Probabilitat i funcions de distribució La funció densitat de probabilitat corresponent al temps de vida, en anys, d'un cert producte, ve donada per:
( ) ( ) 2 ,01.0 ,0x, exxf x1 =β=α>⋅⋅β⋅α=β⋅α−−β

52
Cinc anys després de sortir de la fàbrica es fa una inspecció del producte, i es comprova que encara és funcional. Quina és la probabilitat que aquest duri almenys 3 anys més?
Resolució: funció de distribució Utilitzant la seva definició a partir de la funció densitat de probabilitat,
( ) ( ) ( ) ∫∫∫⋅α ⋅α−λ−α−−β
∞−−=λ⋅==⋅⋅β⋅α==
β⋅2 2t x
0xx
01x
xx e1de...dtetdttfxF
Serieu capaços de calcular la probabilitat demanada en l’enunciat amb aquesta funció de distribució?
Probabilitats condicionades La durada (en hores) d’un tub de ràdio és una variable aleatòria amb funció densitat
( )⎪⎩
⎪⎨⎧
≤
>=
100x , 0100x , x100xf
2
Calculeu: a) Quina és la probabilitat que un tub duri menys de 200 hores si sabem que el tub encara funciona després de 150 hores? b) Quina és la probabilitat que quan instal·lem 3 d’aquests tubs, exactament un d’ells hagi de ser substituït després de 150 hores? c) Quin és el nombre màxim de tubs que es poden instal·lar en un sistema de manera que hi hagi una probabilitat de ½ que després de 150 hores funcionin tots?
Resolució: primer apartat Amb la funció densitat de probabilitat podem calcular la funció de distribució:
( ) ( ) ( ) 1x
100t1100dt
t100dttfdttfxF
x
100
x
0 2
x
0 Xx
XX +−=⋅−=⋅=⋅=⋅= ∫∫∫ ∞−
i les probabilitat necessàries per al càlcul de la condicionada que hem de calcular:
( ) ( ) ( )( ) ( ) ( )
( ) ( ) 31
1501001150F ;
21
2001001200F
150F1x150P1x150P 150F200F200x150P
XX
x
xx
=−==−=
−=≥−=<
−=<<

53
Finalment, la probabilitat que un tub duri menys de 200 hores si sabem que ha durat més de 150 la calculem de la següent manera:
( ) ( )( ) 4
1
311
31
21
x150P200x150P 150x/200xP =
−
−=
<
<<=><
3.7.2 Problemes sobre transformacions
Transformacions quadràtiques Suposem una variable X que es sotmet a una transformació definida per
2X)X(hY == La nova variable Y ha de ser positiva. Quina és la seva funció densitat de probabilitat?
Resolució: transformacions de densitat de probabilitat La derivada inversa del canvi és igual a:
( )y2
1ydyd
dydx
±=±=
i això ja indica que a un mateix valor de la variable Y, s’hi pot anar a partir de dos
valors de X: yx
yx
−=
+=
D’aquesta manera, la densitat de probabilitat de la nova variable en funció de la de X val
( ) ( )y2
yf
y2
yf)y(f XX
Y−
+=
Transformacions monòtones Sigui X una variable aleatòria amb distribució de Cauchy normalitzada, una distribució que té per densitat de probabilitat
( ) ∞<<∞+
⋅π
= x- , x1
11xf2X
Calculeu la densitat de probabilitat de la variable Y definida pel canvi 5X2Y +=

54
Resolució La funció de transformació és monòtona, i per tant només té un valor que porta de X a Y, a més d’una derivada del canvi constant, pel fet de tractar-se d’una transformació lineal:
( )21
25yf
dtdx
25yfyf xxY ⋅⎟
⎠
⎞⎜⎝
⎛ −=⋅⎟
⎠
⎞⎜⎝
⎛ −=
Utilitzant la densitat de probabilitat que ens dóna l’enunciat,
( )( ) ( )22
2
2Y5y4
21
5y4
421
25y
1
121yf
−+⋅
π=
−+⋅
π=
⎟⎠
⎞⎜⎝
⎛ −+
⋅π
=
3.7.3 Problemes sobre característiques
Distribucions gaussianes Els errors aleatoris que es cometen en les pesades d’una balança segueixen una normal de mitjana 0 i desviació típica 2 dg (decigrams). Trobeu l’error màxim en una pesada, amb una probabilitat del 95%.
Resolució Volem trobar entre quins valors [-xm,xm] l’àrea sota una gaussiana de mitjana zero i desviació 2 val 0.95. El primer que s’ha de fer és tipificar la variable a mitjana nul·la i dispersió unitat, per tal de poder utilitzar les taules de la funció error:
2x
20xxy =
−=
σ
μ−=
Ara consultem els valors de la gaussiana de mitjana nul·la i variància unitat (Y) i trobem:
( ) ( ) ( ) 1.95y 475.0yerf 95.0yerf2 95.0yYyP MMMMM =⇒=⇒=⋅⇒=≤≤− És aquest l’error que busquem o hem de “destipificar” la variable? Quin és, per tant, l’error màxim?
Moments d’un dau Designem per X el nombre total de punts obtinguts en una tirada d’un dau ordinari. Trobeu E(X) i la desviació típica de X suposant, òbviament, que el dau no està trucat (és a dir, equiprobabilitat en totes les cares).

55
Resolució Considerant equiprobabilitat, l’esperança és de càlcul directe a partir de la definició:
[ ] [ ] ( )27
61654321xXpxXE
6
1iii =⋅+++++==⋅=∑
= Igual que la variància en aquest senzill problema. Calculem de primer l’esperança del quadrat:
[ ] [ ] ( )691
61654321xXpxXE 222222
6
1ii
2i
2 =⋅+++++==⋅=∑=
i d’aquí:
[ ] [ ] [ ]1235
449
691XEXEXarV 22 =−=−=
56
57
SESSIÓ 11: Variables aleatòries n-dimensionals
FITXA DE LA SESSIÓ � Nom: Variables aleatòries n-dimensionals � Tipus: teòrica � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS Fins a aquesta sessió hem treballat sempre amb variables aleatòries en una dimensió, calculant diverses probabilitats a partir de les seves funcions característiques, i moments de diferent ordre integrant aquestes funcions en el domini de la variable.
OBJECTIUS En aquesta primera sessió més enllà d’una dimensió, l’objectiu és donar les idees bàsiques per poder extrapolar els conceptes unidimensionals a n dimensions. Especialment, es vol introduir i entendre el concepte d’anàlisi conjunta de les variables (funció de probabilitat conjunta, funció distribució conjunta,...).
CONTINGUTS En primer lloc presentarem la funció de distribució conjunta, que és invariant al tipus de variable aleatòria. Després particularitzarem per tipus presentant aquelles funcions i propietats de cada un. En tota la sessió, particularitzarem per comoditat al cas de dues dimensions.
4 Variables aleatòries en n-D
4.1 Definicions
4.1.1 Funció de distribució conjunta En aquest apartat comencem a estudiar les variables n dimensionals, que poden ser interpretades com a diferents components d’un sol vector de n components en l’espai dels reals, provenint de l’espai de successos:

58
( )n1
n
X,...,X)(X:X
=ω→ω
ℜ→Ω�
Definició Com sempre. busquem el càlcul de probabilitat, comencem a definir la funció de distribució multivariant, o més concretament bivariant per dues dimensions:
[ ]yYxXP)y,x(FXY ≤∩≤= És important adonar-se que demanem les condicions en intersecció; per tant, només que una no es compleixi, la funció de distribució ja val zero. La definició és generalitzable per n dimensions, com sempre passarà si no explicitem el contrari. Per no concretar les dimensions, aquesta funció és anomenada generalment distribució conjunta.
� [Leon-Garcia1994] p197-p198 (vegeu especialment la figura 4.4)
� [Martorell2001a] p24
Propietats Com tota funció que expressi probabilitat, la funció de distribució conjunta està fitada inferiorment i superiorment. A banda d’això, és molt interessant notar que és una funció creixent en cada una de les variables:
)x,y(F)x,y(Fyy)y,x(F)y,x(Fxx
2121
2121≤⇒<
≤⇒<
i que té els límits definits segons el seu significat:
0)y,x(Flim
0)y,x(Flim
1)y,x(Flim
XYy
XYx
XY
yx
=
=
=
−∞→
−∞→
+∞→
+∞→
Anàlogament a una dimensió, la principal utilitat de la funció de distribució també és la de calcular probabilitat en intervals, en aquest cas en n dimensions.
� [Leon-Garcia1994] p199 (vegeu especialment la figura 4.6)
� [Martorell2001a] p24-p25

59
4.2 V.A. bidimensionals
4.2.1 V.A. bidimensionals discretes Una V.A. bidimensional discreta es pot entendre com el producte cartesià de dues variables unidimensionals discretes:
{ }{ }{ }1j,1i/)yx()XY(Rang
,...y,...,y,y)Y(Rang,...x,...,x,x)X(Rang
ji
n21
n21
≥≥=
=
=
i igual que en el cas unidimensional tindrà sentit definir-hi una funció que ens parli de la probabilitat que la variable prengui un cert valor.
Funció de probabilitat conjunta Com a extrapolació del cas unidimensional, és la funció que ens dóna la probabilitat que X i Y prenguin uns certs valors:
[ ]jijiXY yYxXP)y,x(f =∩== en què un cop més destaquem el fet que entre els dos “successos” hi ha una intersecció. A partir d’aquesta funció es pot tornar al cas unidimensional: és el que definim com a funcions de probabilitat marginal. Per exemple, demanar un cert valor a X, vol dir demanar-lo a (X,Y) però permetent tots els valors possibles de Y:
∑=j
jiXYiX )y,x(f)x(f
i anàlogament per )y(f jY
� [Leon-Garcia1994] p198 (vegeu especialment la figura 4.5)
� [Martorell2001a] p25-p26
Propietats Com tota funció que es refereix a probabilitats, la funció de probabilitat conjunta ha d’estar fitada superiorment i inferiorment:
1)y,x(f0 jiXY ≤≤ i ha de sumar 1:
1)y,x(fj,i
jiXY =∑

60
4.2.2 V.A. bidimensionals contínues Una variable aleatòria bidimensional és contínua si la seva funció de distribució,
)y,x(FXY , és contínua i totes les seves parcials ho són excepte en un número finit de corbes. Aleshores, li demanem que compleixi una condició de normalització:
1yx
)y,x(Fdxdy XY
2=
∂∂
∂∫∫Ω
d’on ja podem intuir com definirem la funció densitat de probabilitat conjunta.
Funció densitat de probabilitat conjunta Extrapolant el cas unidimensional, i partint de la condició de normalització que es demana a la funció de distribució conjunta, sembla bastant clar que podem definir una funció densitat de probabilitat conjunta com
)y,x(Fyx
)y,x(f XY
2
XY ∂∂
∂=
La relació inversa també és anàloga al cas unidimensional:
∫ ∫∞− ∞−
=y x
XYXY )'y,'x(f'dx'dy)y,x(F
Per calcular la probabilitat en una certa regió A del pla (és a dir, la probabilitat que (X,Y) resultin en aquesta regió), tan sols cal integrar la densitat de probabilitat en aquesta mateixa regió:
[ ] ∫∫=∈
AXY )y,x(dxdyfA)Y,X(P
Densitats marginals Coneixent la densitat de probabilitat conjunta sovint direm que ho coneixem tot. Amb això ens referim que podem trobar les densitats de cadascuna de les variables, integrant respecte de les altres i obtenim el que anomenarem les densitats marginals:
∫∞
∞−
= )y,x(dyf)x(f XYX
i anàlogament per a la resta de variables.
� [Leon-Garcia1994] p201-p206
� [Martorell2001a] p26-p27

61
PROBLEMA Dos amics es troben cada dia a l'andana dels ferrocarrils entre les 08:00 i les 08:30 hores. Si acorden esperar-se un màxim de 10 minuts, trobeu la probabilitat que es trobin
RESUM En aquesta sessió hem extrapolat les principals idees unidimensionals al cas de dues dimensions, per tal de començar a veure com es calculen les probabilitats en plans o espais de n dimensions. Els conceptes que apareixen per bidimensionals (funcions de distribució, funcions marginals, etc.) són anàlegs als unidimensionals i extrapolables al cas n-dimensional.

62

63
SESSIÓ 12: Independència de variables
FITXA DE LA SESSIÓ � Nom: Independència de variables � Tipus: teòrica � Format: no presencial � Durada: 2 hores � Dedicació: 4 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS Fins el moment hem desenvolupat la base per treballar amb variables aleatòries en dues o més dimensions. A la sessió anterior hem definit les funcions que descriuen el comportament conjunt de variables en dues dimensions, i com calcular-ne probabilitats.
OBJECTIUS Un cop hem entrat en variables de més d’una dimensió, és obligat plantejar-se quina és, si existeix, la relació entre les diferents components d’una variable bidimensional o n-dimensional. En aquesta sessió estudiarem els criteris que ens permeten determinar, si existeix, aquesta relació.
CONTINGUTS Per tal d’estudiar la relació entre dues variables (o, equivalentment, entre les components d’una variable bidimensional) introduirem en aquesta sessió les funcions de probabilitat condicionades, i els criteris per saber quan dues o més variables estan condicionades o són independents.
4.3 Distribucions condicionades
4.3.1 Distribucions discretes condicionades Començant per les variables discretes, volem saber com es relacionen. És a dir, si el fet que una hagi pres un cert valor condiciona la probabilitat que les altres prenguin un o d’altre valor. El plantejament és anàleg a quan parlàvem de probabilitat condicionada de successos.

64
Funció de probabilitat condicionada Suposem que treballem amb dues variables X i Y que podem interpretar com les dues components d’una variable bidimensional. La pregunta és com treballar sobre la probabilitat que X hagi pres un cert valor xi, sabent que Y ha pres el valor yj. Per fer-ho, definim la funció de probabilitat de X condicionada a Y = yj :
[ ]jiiyY|X yY|xXP)x(f j ====
Per raonaments equivalents als de successos, la podem calcular a partir del coneixement de la funció de probabilitat conjunta i de la funció de probabilitat de la variable que condiciona:
[ ][ ] )y(f
)y,x(f
yYP
yYxXP)x(f
jY
jiXY
j
jiiyY|X j =
=
=∩===
Propietats De la mateixa definició, apareix una propietat que interpretada a la llum de la teoria de successos té tot el sentit: la probabilitat que X prengui un valor xj i que simultàniament Y prengui un valor yj, és igual a la probabilitat que Y = yj multiplicat per la probabilitat que, sabent que Y = yj, aleshores X = xi :
)x(f)y(f)y,x(f iyY|XjYjiXY j==
De la mateixa manera, podem parlar d’una funció de distribució condicionada:
[ ]jyY|X yY|xXP)x(F j =≤==
� [Leon-Garcia1994] p210-p211
� [Martorell2001a] p27
4.3.2 Distribucions contínues condicionades Per al cas en què la variable sigui contínua podem fer un plantejament anàleg al de la discreta. Matemàticament, però, com que Y és una variable contínua, [ ] 0yYP == i no podem utilitzar exactament les mateixes expressions.
Funció densitat de probabilitat condicionada La funció de distribució condicionada es defineix com de costum, és a dir, per
xX ≤

65
condicionada per la variable Y:
[ ] )y,x(Fy)y(f
1yYhy|xXPlim)x(F XYYh
yY|X ∂
∂=≤<−≤=
∞→=
i derivant-la obtenim la funció densitat de probabilitat condicionada:
)y(f)y,x(f
)y,x(Fyx)y(f
1)x(Fdxd)x(f
Y
XYXY
2
YyY|XyY|X =
∂∂
∂== ==
Aquesta expressió es pot reescriure fent esment de la simetria en la condició: podem construir la densitat de probabilitat a partir del condicionament per X o per Y:
)y(f)x(f)x(f)y(f)y,x(f xX|YXyY|XYXY == ==
� [Leon-Garcia1994] p211-p212 (vegeu figura 4.12)
� [Martorell2001a] p28
Probabilitat total i regla de Bayes De manera equivalent a com vam fer-ho en la teoria de successos, podem enunciar la fórmula de probabilitat total: la densitat de probabilitat per un valor y de Y es pot calcular considerant la densitat de probabilitat d’aquells valors de X compatibles amb Y = y :
∫∫∞
∞−
=
∞
∞−
== )y(f)x(dxf)y,x(dxf)y(f xX|YXXYY
Aplicant aquesta equació a la fórmula simètrica de què parlàvem abans, arribem a una expressió equivalent a la regla de Bayes, equació que ens permet de “girar” les condicionades. És a dir, coneixent una densitat condicionada
)x(f yY|X = podem calcular l’altra:
∫∫∞
∞−
=
∞
∞−
=
=== ===
)x(f)y(dyf
)y,x(f
)x(f)y(dyf
)x(f)y(f
)x(f
)x(f)y(f)y(f
yY|XY
XY
yY|XY
yY|XY
X
yY|XYxX|Y
� [Leon-Garcia1994] p210-p215 (vegeu exemples 4.20 a 4.24)
� [Martorell2001a] p28
66
4.4 Independència de variables aleatòries
4.4.1 Independència de variables aleatòries Considerem habitualment que la independència de dos elements implica el no condicionament de l’un sobre l’altre. La pregunta seria esbrinar com aquest fet es reflecteix en les funcions que caracteritzen les variables aleatòries.
Condició d’independència Matemàticament sobre les funcions densitat o distribució, direm que dues variables X i Y són independents si i només si les seves funcions de distribució compleixen:
)y(F)x(F)y,x(F YXXY = Aquesta condició té implicació directa sobre les funcions de probabilitat per variables discretes:
[ ] [ ] [ ]jiji yYPxXPyYxXP ====∩= i sobre les funcions densitat de probabilitat per variables contínues:
)y(f)x(f)y,x(f YXXY = És a dir, si dues variables X i Y són independents no té sentit parlar de distribucions condicionades:
)y(f)y(f YxX|Y ==
� [Leon-Garcia1994] p207-p209
� [Martorell2001a] p28
PROBLEMA La funció densitat conjunta de dues variables aleatòries amb distribució contínua és
( ) ( ) ( )⎩⎨⎧ ∈+⋅
= contrari casen 0
1,0y,x si xyxk y,xfXY
a)Trobeu el valor de k. b)Trobeu les funcions de densitat marginals. c) Les variables X i Y són independents?
67
RESUM En aquesta sessió hem desenvolupat la manera d’estudiar la relació entre dues variables aleatòries, com quantificar el condicionament entre l’una i l’altra i, en cas que aquesta relació no existeixi, com comprovar que són independents.

68
69
SESSIÓ 13: transformacions de v.a. bidimensionals
FITXA DE LA SESSIÓ � Nom: transformacions de v.a. bidimensionals � Tipus: teòrica � Format: no presencial � Durada: 5 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS Fins aquest moment, hem presentat les funcions per estudiar el comportament de les variables aleatòries bidimensionals (fàcilment extrapolables al cap n-dimensional), i hem parlat de com quantificar la relació entre elles, quan són independents, etc.
OBJECTIUS En aquesta sessió estudiarem com modelar matemàticament magnituds que siguin funció de variables aleatòries, de les quals coneguem el comportament (és a dir, alguna de les funcions que la caracteritzen, la seva distribució, etc.).
CONTINGUTS En primer lloc, estudiarem el cas més senzill en què una magnitud és funció d’una variable aleatòria bidimensional. Més tard, presentarem les eines per fer un canvi de variable (per tant, de dues dimensions a dues dimensions), tant per a variables discretes com per a contínues. Finalment, exposarem alguns casos particulars d’interès.
4.5 Transformacions de v.a. bidimensional
4.5.1 Funció de v.a. bidimensional Suposem que estem estudiant una magnitud Z que és funció d’una variable aleatòria bidimensional, (X,Y). X també és una variable aleatòria, i la qüestió serà estudiar-ne el comportament en funció del de X i Y.

70
Transformació La distribució de la nova variable aleatòria
)Y,X(gZ = ve determinada per la funció g que les relaciona, i per la distribució de (X,Y). Utilitzant la definició, calculem la funció de distribució de Z:
[ ] [ ] ∫∫=∈=≤=
zDXYzZ )y,x(dxdyfD)y,x(PzZP)z(F
en què Dz és el domini del conjunt de valors de (X,Y) que al ser transformats per g compleixen la condició de ser menors o iguals que z:
{ }z)y,x(g/)y,x(D 2z ≤ℜ∈=
A partir de la funció de distribució, com fem habitualment, podem trobar la densitat de probabilitat:
dz)z(dF
)z(f ZZ =
Tota aquesta formulació, exposada per variables contínues, és fàcilment extrapolable a les variables discretes.
� [Leon-Garcia1994] p221
� [Martorell2001a] p29
4.5.2 Casos particulars d’interès Com sembla evident, podem definir tantes transformacions com funcions g(X,Y) siguem capaços d’imaginar. Ara bé, existeixen alguns casos particulars que són particularment interessants per la utilitat que tenen, i perquè permeten comprendre millor com es calcula la funció de distribució en una transformació com la definida a l’apartat anterior.
Transformació suma Una de les transformacions més senzilles és fer la suma de les dues components de la variable bidimensional, que suposarem independents:
YXZ += Donat un valor de z, els valors possibles de x i y estan restringits a la condició
zyx ≤+

71
Per tant, el domini d’integració ve donat per:
{ }zyx/)y,x(D 2z ≤+ℜ∈=
Amb aquest domini, la funció de distribució val
∫∫−
∞−
∞
∞−
=
yz
XYZ )y,x(dxfdy)z(F
que derivant-la per trobar la funció densitat de probabilitat esdevé:
)z(f*)z(f)y(f)yz(dxf)y,yz(dxfdz
)z(dF)z(f YXYXXY
ZZ =−=−== ∫∫
∞
∞−
∞
∞−
És a dir, la funció densitat de probabilitat de la suma de dues variables independents s’obté mitjançant la convolució de les funcions densitat de cada una d’elles.
� [Leon-Garcia1994] p221-p223 (vegeu especialment els exemples 4.31-4.33)
� [Martorell2001a] p31
Màxims i mínims de variables Una altra transformació utilitzada sovint és aquella que ens retorna el màxim o el mínim d’un conjunt de variables. Per exemple, definim la variable Z com el mínim de X i Y:
)Y,Xmin(Z = La funció de distribució val:
[ ] [ ] [ ] [ ] )z(F)z(F)z(F)zY()zX(PzYPzXP)zY()zX(P)z(F XYYXZ −+=≤∩≤−≤+≤=≤∪≤= i derivant-la obtenim la funció densitat de probabilitat:
( ) ( ))z(F1)z(f)z(F1)z(f)z(f XYYXZ −+−= De manera anàloga podem obtenir la densitat de probabilitat de la transformació
)Y,Xmax(Z = : )z(F)z(f)z(F)z(f)z(f XYYXZ +=
� [Leon-Garcia1994] p224-p225
� [Martorell2001a] p31
4.5.3 Canvi de variable per v.a.d. Un altre tipus de transformacions són aquelles en què una variable bidimensional és transformada en una altra també bidimensional. En general, és el que en diríem un

72
canvi de variable bidimensional: donada la variable discreta (X,Y), definim la nova variable (U,V) mitjançant el canvi determinat per les funcions g i h:
⎩⎨⎧
=
=
)Y,X(hV)Y,X(gU
Transformació de les funcions La probabilitat que la nova variable (U,V) valgui
)v,u( lk serà igual a la suma de les probabilitats per tots els valors possibles de (xi,yj) que en ser transformades vagin als anteriors:
[ ] [ ]
{ }ljikji2
jiij
DjilklkUV
v)y,x(h,u)y,x(g/)y,x(D
yY,xXPvV,uUP)v,u(f
ij
==ℜ∈=
====== ∑
Aquesta és la forma amb què determinem les característiques de (U,V) coneixent les de (X,Y).
� [Martorell2001a] p29
4.5.4 Canvi de variable per v.a.c. Per al cas de les variables contínues, el plantejament és anàleg: suposem que les variables (X,Y) són transformades a les noves variables (U,V) mitjançant les funcions g i h:
⎩⎨⎧
=
=
)Y,X(hV)Y,X(gU
en què suposarem que el canvi és invertible, en el sentit que podríem trobar dues funcions que ens permetessin expressar (X,Y) en funció de (U,V).
El jacobià Com es transforma l’espai bidimensional sota aquest canvi de variable? El jacobià respon a aquesta pregunta: és un determinant funció del punt (X,Y) que dóna una idea de com canvia (X,Y) a (U,V). Ve definit per
yv
xv
yu
xu
)y,x(J
∂
∂
∂
∂∂
∂
∂
∂
=

73
i respecte de la transformació inversa compleix que
)y,x(J1)v,u(J =
� [Leon-Garcia1994] p227-p229 (vegeu especialment la figura 4.17)
Transformació de les funcions La funció densitat de probabilitat de la variable transformada (U,V) s’expressa a partir de la funció de (X,Y) de manera anàloga al cas unidimensional, amb el jacobià jugant ara el paper de la derivada del canvi:
( )⎪⎩
⎪⎨
⎧∈
=−−
altres0
Dv)(u, si)v,u(h),v,u(gfJ1
)v,u(f uv11
XYUV
en què uvD és el domini d’aquells valors que tenen imatge mitjançant la transformació. És a dir, aquells valors als quals algun )y,x( pot anar:
( ){ }2uv )y,x/()y,x(h),y,x(gD ℜ∈=
A causa de problemes en el jacobià, per a algunes transformacions aquestes expressions no són aplicables (punts en què el jacobià sigui nul, transformacions no invertibles de forma unívoca,...). L’alternativa ja ha estat plantejada en un apartat anterior: calcular
)v,u(FUV i derivant respecte de cada una de les variables trobar )v,u(fUV .
� [Leon-Garcia1994] p227-p231
� [Martorell2001a] p30
PROBLEMA Suposem una variable bidimensional (X,Y) i la variable Z definida com )Y,Xmax(Z = Dedueix l’expressió de la funció densitat de probabilitat de Z, suposant que coneixem la conjunta de X i Y. Com pots expressar el resultat si sabem que X i Y són independents?
PROBLEMA Es tira un dau (legal) i s’observa el resultat obtingut en el llançament. Es defineixen les variables aleatòries X i Y. X pren el valor -1 si el resultat és senar i 1 si és parell és parell. Y pren el valor –2 si el resultat és 1, 2 o 3, el valor 0 si el resultat és 4, i el valor
74
3 si el resultat és 5 o 6. Determineu la funció probabilitat i la funció distribució de la variable aleatòria bidimensional (X,Y).
RESUM En aquesta sessió hem desenvolupat tot un seguit de tècniques per estudiar la transformació de variables aleatòries bidimensionals, tant per al cas de variables contínues com per al de discretes.
75
SESSIÓ 14: característiques, covariància i correlació
FITXA DE LA SESSIÓ � Nom: característiques, covariància i correlació � Tipus: teòrica � Format: no presencial � Durada: 4 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS En les anteriors sessions hem desenvolupat totes les eines per a l’estudi de les variables aleatòries bidimensionals o n-dimensionals: funcions de distribució, funcions de probabilitat o de densitat de probabilitat, transformacions de variables.
OBJECTIUS Com ja vàrem estudiar pel cas unidimensional, les característiques d’una variable aleatòria són magnituds que ens donen informació sobre el seu comportament, sense arribar-la a caracteritzar absolutament. En aquesta sessió estudiarem com es plantegen aquestes qüestions pel cas bidimensional, i com quantificar la relació entre les components d’aquesta variable.
CONTINGUTS En primer lloc, presentarem les magnituds més característiques d’una variable bidimensional, quin sentit tenen i com calcular-les. A continuació, discutirem com quantificar la relació entre les dues components d’una variable bidimensional.
4.6 Característiques, covariància i correlació
4.6.1 Característiques En el fons, qualsevol magnitud característica que puguem definir no és més que l’esperança d’alguna funció de la variable que estudiem. En general, donada una variable bidimensional (X,Y), estudiarem l’esperança d’una funció g(X,Y) a partir de la definició del concepte d’esperança com a ”suma” de totes les possibilitats ponderades per la funció (densitat) de probabilitat:

76
[ ]
[ ] ∫∫
∑
Ω
=
=
)y,x(f)y,x(dxdyg)y,x(gE
)y,x(f)y,x(g)y,x(gE
XY
j,ijiXYji
Esperança i moments Bona part de la informació d’una distribució l’obtindrem treballant amb els moments d’aquesta. Els moments, igual que en el cas unidimensional, són esperances de potències de la variable. En general, per una variable bidimensional, els definim com:
[ ]srrs yxE=α
� [Leon-Garcia1994] p232
� [Martorell2001a] p31-p32
Propietats de l’esperança L’esperança d’una funció és un operador amb tota una sèrie de propietats interessants. D’entrada, sembla clar que les definicions introduïdes fins ara per variables bidimensionals les podem generalitzar a variables n-dimensionals. Com a propietat important, l’esperança és un operador lineal: aplicat a una combinació lineal de variables, el resultat és la combinació lineal de l’esperança de les diferents variables,
[ ] [ ] [ ]nn11nn11 XEa...XEaXa...XaE ++=++ D’altra banda, si {X1,...,Xn} són variables independents, es compleix que
[ ] [ ] [ ] [ ]n21n21 XE...XEXEX...XXE =
� [Leon-Garcia1994] p232 (vegeu exemple 4.39)
� [Martorell2001a] p32
4.6.2 Covariància Suposem una variable bidimensional (X,Y). Estudiarem a continuació la relació que hi ha entre les dues components, mitjançant el coeficient de covariància. En primer lloc, podem generalitzar la definició de moments a variables centrades en mitjana:
[ ]sy
rxs,r )Y()X(E μ−μ−=μ

77
Càlcul del coeficient de covariància Com a cas particular dels moments centrats en mitjana, definim el coeficient de covariància:
[ ] [ ])Y)(X(EY,XCov yx11 μ−μ−=μ= Aquest coeficient mostra la relació lineal que hi ha entre les components X i Y. Per calcular-lo, sovint utilitzarem la següent expressió:
[ ] [ ] [ ] [ ] [ ]YEXEXYE)Y)(X(EY,XCov yx −=μ−μ−=
� [Leon-Garcia1994] p233
� [Martorell2001a] p32-p33
Propietats de la covariància D’entrada és interessant notar que la covariància és una magnitud simètrica a l’ordre de les variables:
[ ] [ ]X,YCovY,XCov = i que si les dues variables són la mateixa, recuperem la variància:
[ ] [ ]XVarX,XCov = Però potser la propietat més important és el fet que si X i Y són variables independents, aleshores l’esperança del producte és igual que el producte d’esperances i
[ ] [ ] [ ] [ ] 0YEXEXYEY,XCov =−= Per això, direm que les variables independents són variables amb covariància nul·la, però és molt important tenir clar que a l’inrevés no ha de per què ser cert.
� [Leon-Garcia1994] p233 (exemple 4.41)
� [Martorell2001a] p33
Transformacions i combinacions lineals Com es veu afectada la covariància d’una variable (X,Y) en transformar-la de manera lineal? Suposem que definim la nova variable (U,V) segons la transformació
⎩⎨⎧
+=
+=
dcYVbaXU
La covariància de la nova variable és veu afectada pel canvi d’escala, però no pel canvi d’origen:
[ ] [ ]Y,XacCovV,UCov =

78
D’altra banda, la covariància de combinacions lineals de variables aleatòries compleix propietats de linealitat:
[ ]∑∑∑ =
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
j,ijiji
jjj
iii Y,XCovbaYb,XaCov
4.6.3 Correlació Sovint ens interessarà quantificar la relació entre X i Y, però el coeficient de covariància no està normalitzat. És a dir, quant vol dir una covariància “gran” o “petita”?
Càlcul del coeficient de correlació La idea, doncs, és utilitzar una magnitud que tingui la mateixa interpretació que el coeficient de covariància, però normalitzada. Definim el coeficient de correlació lineal entre X i Y com:
[ ][ ] [ ]
[ ]yx
XYY,XCov
YVarXVarY,XCov
σσ==ρ
que de fet és la covariància normalitzada per la dispersió de les dues components de (X,Y). És a dir, el coeficient de correlació compleix:
11 XY ≤ρ≤− Igualment que amb la covariància, les variables independents tenen correlació nul·la (diem que estan decorrelades). Una transformació lineal només afecta ρxy en el seu signe: suposant la transformació
⎩⎨⎧
+=
+=
dcYVbaXU
el coeficient de correlació val:
XYUV baab
ρ=ρ
� [Leon-Garcia1994] p233-p235
� [Martorell2001a] p34
Interpretació geomètrica Si representéssim els punts (X,Y) en un pla, ens apareixeria un núvol de punts més dens allí on la densitat de probabilitat fos major, centrat a la mitjana de (X,Y) i amb la dispersió de les variables determinant-ne la mida.
79
Si els punts es troben principalment al primer i el tercer quadrant, hi ha clarament una relació lineal positiva entre les variables. En aquests casos, el producte X·Y és majoritàriament positiu, amb la qual cosa
0XY >ρ Si els punts apareixen majoritàriament en el segon i quart quadrant, aleshores
0XY <ρ En canvi, si la distribució de punts és homogènia al voltant de la mitjana, diem que no hi ha una relació lineal entre X i Y, i aleshores trobarem
0XY ≈ρ
� [Martorell2001a] p34-p35
PROBLEMA Demostra que la covariància de dues variables X i Y es pot calcular com [ ] [ ] [ ]YEXEXYE − .
PROBLEMA Siguin X i Y dues variables independents, distribuïdes uniformement en l’interval [0,1]. Definim les variables
YXVYXU
−=
+=
Què val el coeficient de correlació entre U i V? Són aquestes dues variables independents?
RESUM En aquesta sessió hem presentat com calcular aquelles magnituds que caracteritzen una variable aleatòria. Com que treballem amb variables bidimensionals, té sentit definir característiques que parlin de la relació entre les seves components.

80
81
SESSIÓ 15: problemes de V.A. en 2-D
FITXA DE LA SESSIÓ � Nom: problemes de V.A. en 2-D � Tipus: de problemes � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
� ����������������
PRECEDENTS Fins al moment hem desenvolupat totes les eines necessàries per calcular probabilitats en variables unidimensionals, bidimensionals i, en general, n-dimensionals. A més, en la darrera sessió vàrem presentar tota una sèrie de magnituds per caracteritzar les variables sense les seves funcions de probabilitat.
OBJECTIUS Un cop arribats a aquest punt, té sentit plantejar una sèrie de problemes per tal de clarificar conceptes i polir la metodologia del càlcul en variables bidimensionals.
CONTINGUTS En aquesta sessió presentarem tot un conjunt de problemes sobre els diferents temes d’interès en variable bidimensional, alguns dels quals senzillament seran proposats, mentre que respecte d’altres donarem alguns passos per a la resolució.
4.7 Problemes de V.A. en 2-D
4.7.1 Càlcul de probabilitats
Probabilitats en dues dimensions Donats els números reals a i b triats a l’atzar i de manera independent entre 0 i 1, calculeu la probabilitat que
0bax2x2 =++ tingui arrels reals.
82
Resolució Les dues variables estan uniformement distribuïdes entre 0 i 1, i per tant, la seva funció de distribució és
( ) ( ) ( )⎩⎨⎧ ∈
=contrari casen 0
1,0b,a si 1b,af AB
Per calcular les arrels hem de resoldre l’equació
( )2
b4a2a2x
2 −±−=
i perquè les solucions siguin reals s’ha de complir
0ba2 ≥− És a dir, hem de calcular la probabilitat que el valor de la variable ‘a’ al quadrat sigui major que el valor de ‘b’.
[ ]31dbda0baP
2a
0
1
0
2 ==≥− ∫∫
� [Martorell2001b]
Probabilitats condicionades L'arribada del correu a una empresa es produeix amb la mateixa probabilitat en qualsevol instant entre les 10 i les 11 hores. El conserge l’entrega al secretari de la directora, també amb la mateixa probabilitat, en qualsevol instant des del moment que arriba però no mai més tard de les 11 hores. a) A quina hora, en mitjana, rebrà el secretari el correu? b) Quina serà la probabilitat que la directora el rebi abans de dos quarts d’onze?
Resolució: primer apartat Anomenem X la variable que indica l’arribada del correu, i Y aquella que indica l’hora d’entrega. L’enunciat ens diu que X és una variable distribuïda uniformement:
( ) ( ) ( )⎩⎨⎧ ∈
=→≈casos de resta la 0
11,10x si 1xf11,10U X x
i que Y també ho és entre x i 11. Això fa que puguem escriure la densitat de probabilitat de Y condicionada a X:
( ) ( )⎪⎩
⎪⎨
⎧∈
−==casos de resta la 0
11,xy ,x11
1y,xf xX|Y

83
amb la qual cosa calculem la densitat de probabilitat conjunta, indispensable per a calcular probabilitats i moments:
( ) ( ) ( )x11
1x11
11y,xfxfy,xf xX|YXXY −=
−⋅=⋅= =
Amb la distribució, calculem l’esperança de Y, que ens donarà l’hora en mitjana d’arribada del correu al secretari:
[ ] hores 75.10x11
1y·dydxyE11
10
11
x=
−⋅= ∫ ∫
és a dir, esperem que l’arribada, en mitjana sigui a les 10h i 45min.
� [Martorell2001b]
4.7.2 Transformacions de variables bidimensionals
Procés de suma La funció densitat conjunta de dues variables aleatòries X,Y és
( )⎩⎨⎧ <<<
=contrari casen 0
1yx0 si 2y,xfXY
Trobeu la funció de densitat de la variable Z = X+Y.
Resolució En una sessió anterior vam comentar que la funció densitat de probabilitat de la variable suma era igual a la convolució de funcions densitat de cadascuna de les variables sumades. Una altra manera de calcular-ho és intentar trobar la funció de distribució:
( ) ( ) ( ) ( ) dxdyy,xfzYXPzZPzFZD
XYZ ⋅⋅=≤+=≤= ∫∫
És a dir, trobar el domini Dz dels punts (X,Y) que compleixen
zYX ≤+ D’entrada, la condició x<y limita la regió al triangle superior del quadrat 1x1. Per un valor de z donat, la condició límit esdevé y = z - x, i això indica que la regió inferior a aquesta recta és la que compleix
zYX ≤+ En funció dels valors de z, calculem la funció de distribució:

84
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
−+−≤<
=≤<
<
∫ ∫−
12z 21z2z
212z1
z21dy2dx1z0
00z
2
2z
02xz
x
i d’aquí derivant obtenim la densitat de probabilitat:
( )⎪⎩
⎪⎨
⎧
≤<−
≤<
=
contrari casen 0 2z1 z2 1z0 z
zfz
� [Martorell2001b]
4.7.3 Independència de variables
Independència de variables bidimensionals La funció densitat conjunta de dues variables aleatòries amb distribució contínua és
( ) ( ) ( )⎩⎨⎧ ∈+⋅
= contrari casen 0
1,0y,x si xyxk y,xfXY
a)Trobeu el valor de k i les funcions de densitat marginals. b) Les variables X i Y són independents? Què val el seu coeficient de correlació?
Resolució: funcions densitat de probabilitat El valor de k l’obtenim per normalització de la probabilitat a 1:
( ) ( )34k
43kdydxy1xkdydxy,xf1
1
0
1
0XY =⇒⋅=⋅⋅+⋅⋅=⋅⋅= ∫ ∫∫ ∫
+∞
∞−
+∞
∞−
i un cop coneguda la funció densitat conjunta, integrant respecte de cada una de les variables obtenim les funcions densitat marginals:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )1,0y si y132y1
21
34dyy1x
34dxy,xfyf
1,0x si x2211x
34dyy1x
34dyy,xfxf
1
0XYy
1
0XYx
∈+=+⋅⋅=⋅+⋅⋅=⋅=
∈=⎟⎠
⎞⎜⎝
⎛+⋅⋅=⋅+⋅⋅=⋅=
∫∫
∫∫∞+
∞−
+∞
∞−

85
Resolució: independència i correlació de variables Les variables X i Y seran independents si només si les seves funcions densitat compleixen:
( ) ( ) ( )y,xfyfxf XYyx =⋅ En el nostre problema comprovem com el producte de les dues marginals dóna igual a la funció de densitat conjunta:
( ) ( ) ( ) ( ) ( )1,0y,x si y1x34 y1
32 x2 yfxf yx ∈+⋅⋅=+⋅=⋅
i, per tant, les dues variables del problema són independents. En aquest cas, podem assegurar que el seu coeficient de correlació val zero, cosa que a l’inrevés no podríem afirmar.
� [Martorell2001b]

86
87
SESSIÓ 16: regressió lineal
FITXA DE LA SESSIÓ � Nom: regressió lineal � Tipus: teòrica � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS Fins ara, hem desenvolupat les eines per treballar amb variables aleatòries en qualsevol dimensió, incloent-hi els conceptes necessaris per determinar les magnituds que les caracteritzen i les relacions entre les seves components.
OBJECTIUS Ara bé, si existeix relació entre les components d’una variable aleatòria (bidimensional, per exemple), hauria de ser possible utilitzar aquesta informació per fer predicció. És a dir, per preguntar-se sobre una de les components utilitzant la informació que tenim de les altres, i la relació que hi ha entre elles.
CONTINGUTS En aquesta sessió desenvoluparem les tècniques per determinar la millor recta amb què es pot aproximar la distribució d’una variable bidimensional, minimitzant l’error definit com a error quadràtic mitjà.
5 Regressió i correlació
5.1 Regressió lineal
5.1.1 Regressió lineal El model més senzill que podem suposar que relaciona les dues components d’una variable bidimensional és un model lineal. És a dir, una recta. L’objecte d’aquest apartat és trobar aquesta recta i desenvolupar algun coeficient que indiqui la qualitat del model.

88
Criteri per a la construcció del model Suposem una variable bidimensional (X,Y). El nostre objectiu serà construir una model lineal de Y en funció de X. A aquest model o estimació l’anomenarem Ŷ, regressió lineal:
β+α= XY~ Per tant, estimar el model és equivalent a determinar el valor dels dos coeficients α i β. El criteri serà minimitzar una certa funció d’error respecte del valor real, Y. En general, utilitzem l’error quadràtic mitjà, és a dir, el valor esperat de la diferència entre predicció i valor real al quadrat:
( ) ( )[ ] ),(XYEY~YE 22βαΦ≡β−α−=⎥⎦
⎤⎢⎣⎡ −
funció de les dues components. Anul·lant les dues parcials de Φ ( α, β) respecte de cada un dels paràmetres, trobem els valors d’aquests que fan mínim l’error quadràtic mitjà. És a dir, trobem la millor estimació.
� [Leon-Garcia1994] p246-p247
� [Martorell2001a] p38-p39
Càlcul de la recta de regressió Resolent el sistema lineal en α i β:
[ ] [ ] [ ]
[ ] [ ] 0222
0222 2
=++−=∂
Φ∂
=+−=∂
Φ∂
βαβ
βαα
XEYE
XEXYEXE
obtenim els valors dels coeficients que fan millor l’ajustament lineal i donen la recta de regressió:
[ ][ ]
[ ] [ ][ ] [ ]XEXVar
Y,XCovYE
XVarY,XCov
−=β
=α
que es pot reescriure de la forma habitual per al model lineal:
( )xyx
XYy XY~ μ−σ
σρ=μ−
en què ρxy és el coeficient de correlació lineal entre X i Y, ja definit anteriorment.
� [Leon-Garcia1994] p247
� [Martorell2001a] p39

89
Bondat de l’estimació Un aspecte clau de l’estimació minimitzant error quadràtic mitjà és el fet que el model obtingut és el “millor”, però això no implica necessàriament que sigui “bo”. És a dir, necessitem algun paràmetre que ens indiqui la bondat del model i així, en funció de les nostres necessitats, decidir si és “bo” o no. En primera aproximació, voldríem que el valor mitjà de l’estimador obtingut, Ŷ, fos igual que el de la variable Y. Aplicant l’operador esperança a les dues bandes de l’equació que ens dóna la recta de regressió, obtenim
[ ] [ ]YEY~E = És a dir, en mitjana és una bona estimació. Ara bé, encara podria ser que l’estimació fos molt dispersa al voltant del mateix valor mitjà i, per tant, no la consideraríem una “bona” aproximació. Una idea de la dispersió de l’estimació ens la dóna la variància de l’error, que voldríem tan menor com fos possible:
( )[ ] [ ]( )2XY1YVar...Y~YVar ρ−==−
Per tant, la bondat de l’estimació vindrà donada directament pel valor del coeficient de correlació, ρxy.
� [Leon-Garcia1994] p248
� [Martorell2001a] p40
El paper del coeficient de correlació En la regressió lineal descobrim el veritable sentit del coeficient ρxy. Hem vist anteriorment que ρxy dóna una idea de la relació lineal existent entre les variable X i Y. Suposem, doncs, que existeix una forta relació lineal entre aquestes dues variables. Aleshores es complirà
1XY ≈ρ i obtindrem una variància de l’error propera a zero:
( )[ ] 0Y~YVar ≈−
És a dir, el model donarà un error molt poc dispers al voltant del seu valor mitjà, que és zero. Per tant, haurem obtingut un model lineal molt bo, com és lògic que correspongui al de dues variables amb forta dependència lineal. En canvi, si la correlació és molt petita pràcticament no hi ha relació lineal entre X i Y. Això porta a
( )[ ] [ ]YVarY~YVar ≈− És a dir, una estimació molt dispersa. De fet, en aquest cas l’estimació que s’obté és
yY~ μ≈
90
la pitjor estimació possible: el model per Y ens dóna senzillament el seu valor mitjà.
� [Martorell2001a] p40
PROBLEMA Demostra que els valors trobats pels coeficients α i β del model lineal corresponen a un mínim de l’error quadràtic mitjà, i no pas a un màxim.
RESUM En aquesta sessió hem exposat la manera de construir un model lineal per estimar el comportament d’una variable Y condicionada a X. A més, també hem estudiat les propietats que fan de ρxy un bon estimador de la bondat d’ajustament.
91
SESSIÓ 17: Corba de regressió
FITXA DE LA SESSIÓ � Nom: Corba de regressió. � Tipus: teòrica � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS En l’anterior sessió vàrem desenvolupar la metodologia per trobar quin és el millor model lineal per estimar la relació entre les components d’una variable bidimensional, així com la forma d’avaluar-ne la bondat.
OBJECTIUS L’objectiu bàsic d’aquesta sessió és estudiar com construir un model més complex que el lineal per modelar la relació entre les dues components d’una variable bidimensional. També intentarem desenvolupar un criteri per conèixer la bondat d’aquest model.
CONTINGUTS En primer lloc, desenvoluparem com trobar aquest model no-lineal, i després buscarem una magnitud que ens doni una idea de quina és la fidelitat amb què aquest model estima les variables modelades.
5.2 Corba de regressió
5.2.1 Corba de regressió Sovint, aproximar un conjunt de dades mitjançant un model lineal no és el més apropiat. Per tant, en aquest apartat no ens preocuparem per buscar la millor recta, sinó la millor funció, el que anomenarem la corba de regressió. És a dir, en cap moment restringim el tipus de funció del model.

92
Càlcul de la millor funció D’entrada, si volem calcular la millor funció que estimi una certa variable Y a partir del coneixement que tenim de X, hem de determinar quin criteri utilitzem per decidir quina és la “millor”. Igual que fèiem en la recta de regressió, el criteri serà considerar òptima aquella funció que minimitzi l’esperança de l’error quadràtic mitjà: és a dir, buscarem aquella funció
)X(gY~ = que faci mínim l’error quadràtic mitjà:
( )[ ]2)X(gYE − Es demostra que minimitzar aquest error s’aconsegueix amb la funció
[ ]xXYE)X(g == esperança condicionada que podem calcular com
[ ] ∫∞
∞−
=== )y(fy dyxXYE xXY
� [Leon-Garcia1994] p248-p249
� [Martorell2001a] p40-p41
Propietats a recordar Per calcular la millor estimació, doncs, haurem de calcular una esperança condicionada. Cal recordar que la funció densitat de probabilitat condicionada es pot calcular a partir de la conjunta:
∫∞
∞−
= ==
)y,x(f dy
)y,x(f)x(f
)y,x(f)y(f
XY
XYX
XYxXY
Igualment, si les dues variables X i Y són independents, es compleix que
)y(f)y(f YxXY ==
i aleshores la millor estimació de Y de és senzillament la seva esperança:
[ ] [ ]YExXYE)X(g ===
� [Martorell2001a] p41

93
Bondat de l’ajustament Igual que amb la regressió lineal, que l’ajustament trobat sigui el “millor”, no garanteix que sigui “bo”. És a dir, que la informació de Y que dóna a partir del coneixement de X sigui satisfactòria segons allò que necessitem en cada cas. Sobre l’esperança de la predicció, es compleix que:
[ ] [ ][ ] [ ]YExXYEEY~E === i aleshores podrem dir que l’estimació és bona en mitjana:
[ ] 0Y~YE =− Ara bé, això no ens assegura que el nostre model sigui poc dispers al voltant de la mitjana correcta. Per assegurar-ho, definim el coeficient de correlació (no lineal) com
[ ][ ]YVarY~Var2
XY=η
relacionat amb la variància de l’error com:
[ ] [ ] ⎟⎠
⎞⎜⎝
⎛η−− 2
XY1YVarY~YVar
� [Martorell2001a] p41-p42
Propietats del coeficient de correlació El coeficient de correlació per una corba qualsevol compleix les mateixes propietats de normalització que el coeficient de correlació lineal:
10 2XY≤η≤
També el seu paper per indicar la bondat de l’ajustament és anàleg: en cas que aquest coeficient de correlació sigui proper a 1, aleshores la dispersió de l’error és pràcticament nul·la
[ ] YY~ 0Y~YVar ≈⇒≈− i diem que l’ajustament realitzat és bo. En canvi, si el coeficient és proper a zero, aleshores la variància de l’error és semblant a la variància de Y, i la predicció és molt dolenta:
[ ]YEY~ ≈ Anant més enllà, és important que ens adonem que en cas que el millor estimador sigui un model lineal, la funció g(X) que obtindrem serà la recta predita per la regressió lineal, i a més
2XY
2XY
ρ=η
� [Martorell2001a] p42
94
PROBLEMA Suposem dues variables gaussianes (X,Y) amb un coeficient de correlació ρxy. Demostreu que la millor estimació possible és la recta de regressió.
RESUM En aquesta sessió hem ampliat les metodologies per trobar estimadors més enllà del model lineal. Si en la sessió anterior havíem desenvolupat la regressió lineal, en aquesta hem presentat la manera de calcular la millor funció que s’adapti a la distribució de les variables X i Y, estudiant-ne la bondat.
95
SESSIÓ 18: Teorema del límit central
FITXA DE LA SESSIÓ � Nom: Teorema del límit central � Tipus: teòrica � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS Fins a aquest moment hem descrit diverses formes d’analitzar la relació entre dues variables, tant si el model que les relaciona és lineal, com si preferim ajustar-hi una corba qualsevol.
OBJECTIUS L’objectiu d’aquesta sessió és estudiar quines són les propietats de la suma de variables aleatòries, especialment quan el nombre de variables que se sumen és elevat. Aquest fet el relacionarem amb la fiabilitat de la mitjana aritmètica com a mesura experimental de l’esperança d’una variable.
CONTINGUTS En primer lloc, en aquesta sessió exposarem quin és el comportament de la suma de variables, i com se’n calculen les funcions que la caracteritzen. A continuació, estudiarem com afecta això a la mitjana aritmètica, i com aproximar els càlculs d’aquesta quan el nombre de variables que se sumen és molt elevat.
5.3 Teorema del límit central
5.3.1 Suma de variables aleatòries En aquest apartat estudiarem com, en una suma de variables, és possible conèixer el valor de les magnituds que les caracteritzen, així com les funcions densitat de probabilitat de la suma.

96
Característiques de la suma de variables En primer lloc, analitzarem com calcular l’esperança de la suma d’un conjunt de variables, de les quals coneixem l’esperança. En general, per a un nombre de variables qualssevol, es pot demostrar que
[ ] [ ] [ ]n1n1 XE...XEX...XE ++=++ sense que les variables {X1,...,Xn} hagin de complir cap condició. Pel que fa a la variància, en general es compleix que la variància d’una suma de variables és la suma de variàncies més un conjunt de termes creuats:
[ ] [ ] [ ]∑∑>==
+=++n
jk1j
kj
n
1jjn1 X,XCov2XVarX...XVar
és a dir, en general no és cert dir que la variància de la suma és igual a la suma de variàncies. Això només serà cert si les variables estan decorrelades: en aquest cas tots els termes deguts a les covariàncies seran nuls, i es complirà:
[ ] [ ] [ ]n1n1 XVar...XVarX...XVar ++=++
� [Leon-Garcia1994] p269-p271
� [Martorell2001a] p42-p43
Funcions que caracteritzen la suma de variables Més enllà d’esperança i variància, seria interessant que poguéssim calcular la funció densitat de probabilitat de la suma a partir de les funcions de cada una de les variables que sumem. Per dues variables, hem vist anteriorment que si Z = X + Y aleshores
)z(f*)z(f)z(f YXZ = Aquesta relació és generalitzable a més variables de la manera següent: si la funció densitat de la suma de dues variables és la convolució de les seves funcions densitat, la funció característica és igual al producte
)t()t()t( yxyx ϕϕ=ϕ + Aquesta darrera expressió sí que és generalitzable a n variables:
)t()···t()t( n1n1 xxx...x ϕϕ=ϕ ++ i d’aquí, la funció densitat de probabilitat de la suma es calcula com la transformada de Fourier inversa de la funció característica:
[ ])t()···t(TF)x...x(f n1n1 xx1
n1x...x ϕϕ=++ −++
� [Leon-Garcia1994] p271-p273
� [Martorell2001a] p43

97
5.3.2 Llei dels grans nombres Donada una variable X de mitjana μ desconeguda, per estimar-la utilitzaríem la mitjana aritmètica després d’haver fet n mesures. Fins i tot, amb aquestes mesures, podríem estimar la variància d’aquesta variable. Ara bé, sense conèixer res més que això (és a dir, sense conèixer la seva distribució), com podem calcular probabilitats?
Esperança i variància de la mitjana aritmètica Per tal de tractar-ho des del punt de vista de les variables aleatòries, podem suposar que les mesures fetes de X han estat totes independents entre elles. D’aquesta manera, el conjunt de n mesures el podem tractar com un conjunt de variables {X1,...,Xn} independents i idènticament distribuïdes (el que abreujarem com iid). Per estimar-ne l’esperança, utilitzem la mitjana aritmètica:
∑=
=n
1jjn X
n1M
És aquesta magnitud un bon estimador de E[X]? Per ser-ho, hi hauria de coincidir en mitjana i tenir la variància tan petita com fos possible. Pel que fa a la mitjana,
[ ] [ ] x
n
1jj
n
1jjn XE
n1X
n1EME μ==
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡= ∑∑
==
Ja sabem, però, que això no implica necessàriament que sigui un bon estimador: encara falta mirar que la dispersió de E[X] respecte de μ sigui petita:
[ ] ( )[ ]n
...MEMVar2
2xnn
σ==μ−=
Arran d’això concloem que la mitjana aritmètica serà tan més bon estimador de E[X] com més gran sigui el nombre de mesures que realitzem, la qual cosa ja sabem quotidianament.
� [Leon-Garcia1994] p275-p276
� [Martorell2001a] p43-p44
Llei dels grans nombres La pregunta que ara hem de respondre és si, coneixent únicament la mitjana i variància de Mn, podem fer algun càlcul sobre probabilitats. En concret, ens pot interessar saber quantes mesures hem de fer perquè la mitjana aritmètica experimental, Mn, sigui a prop de l’esperança, μ, una certa quantitat amb una certa confiança.

98
Mitjançant la desigualtat de Txebitxev, la probabilitat que havent fet n mesures la mitjana aritmètica es desviï de μ més que una quantitat ε és igual a:
[ ] [ ]ε
≤ε≥μ−MnVarMP xn
Anteriorment hem calculat què val la variància de la suma de variables, i amb això l’anterior equació se’ns transforma a:
[ ]2
2xn
n1MP
ε
σ−≤ε<μ−
D’aquí en surten les dues versions conegudes de la llei dels gran nombres: la llei feble afirma que
[ ] 1MPlim xnn
=ε<μ−∞→
mentre que la llei forta diu que
1MlimP xnn
=⎥⎦
⎤⎢⎣
⎡μ=
∞→
Resumint, ambdues versions asseguren que la mitjana aritmètica, Mn, tendeix a l’esperança de la variable, E[X] o μ, a mesura que el nombre de mesures és més gran.
� [Leon-Garcia1994] p277-p279
� [Martorell2001a] p44
5.3.3 Teorema del límit central En tots els càlculs exposats en aquesta sessió hem vist com la formulació per sumes d’un elevat nombre de variables és força feixuga. Seria possible fer algun tipus d’aproximació en el límit d’un nombre de variables molt elevat?
Teorema del límit central Suposem un conjunt de variables {X1,...,Xn} independents i idènticament distribuïdes (iid). Si definim la variable Sn com la seva suma:
n1n X...XS ++= d’aquesta variable en coneixem l’esperança i la variància
[ ][ ] 2
n
xn
nSVar
nSE
σ=
μ=

99
Ara bé, quina és la distribució que segueix una suma de n variables? Òbviament, dependrà de la distribució de cada una d’elles. Ara bé, si el nombre de variables iid que sumem és molt elevat, el teorema del límit central ens permet fer un aproximació. En primer lloc, tipifiquem la variable:
nnS
Z xnn
σ
μ−≡
Per un valor elevat de n, aquesta variable suma tipificada tendeix a una gaussiana de mitjana 0 i variància 1:
[ ] ∫∞−
−
∞→ π=≤
z2/x
nn
2e dx
21zZPlim
Aquest és el teorema del límit central, i la justificació per la qual tot sovint ens trobem en distribucions gaussianes en problemes reals, especialment en aquells en què la magnitud estudiada és fruit de la suma de tota una sèrie de petites contribucions.
� [Leon-Garcia1994] p280-p288 (vegeu especialment les figures 5.2 a 5.6)
� [Martorell2001a] p44-p45
PROBLEMA Suposem un conjunt {X1,...,Xn} de gaussianes independents, de mitjanes {μ1,... μn} i dispersions {σ1,..., σn}. Sabent que la funció característica d’una variables gaussiana és igual a
2ttj
x
22x
e)t(σ
−μ=ϕ
demostreu que la suma és també una gaussiana, i calculeu de quina mitjana i variància.
RESUM En aquesta sessió hem estudiat quin és el comportament d’una suma de variables aleatòries, i com es relaciona aquest comportament amb la fiabilitat de la mitjana aritmètica com a estimador de l’esperança d’una variables. Finalment, hem vist quines són les aproximacions possibles a fer per un nombre de variables elevat.
100
101
SESSIÓ 19: Distribucions gaussianes
FITXA DE LA SESSIÓ � Nom: Distribucions gaussianes � Tipus: teòrica � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS En arribar a aquest punt podem dir que em desenvolupat pràcticament el conjunt de tècniques i eines necessàries per a realitzar el càlcul de probabilitats en un nombre de dimensions arbitrari, així com per a establir les relacions entre un certs conjunt de variables amb comportament aleatori.
OBJECTIUS En aquesta darrera sessió teòrica abans d’entrar en els processos estocàstics, l’objectiu és tractar com un problema a banda el cas de les variables gaussianes en més d’una dimensió. Ja s’ha vist anteriorment per què són tan comunes. Ara desenvoluparem la formulació necessària per treballar-hi en un cas bidimensional.
CONTINGUTS En definitiva, exposarem les expressions que ens estableixin la distribució que segueixen les components d’una variable aleatòria bidimensional, així com la manera de representar gràficament i avaluar quantitativament la seva relació. Finalment, generalitzarem els conceptes a un nombre de dimensions qualsevol.
5.4 Distribucions gaussianes
5.4.1 Distribucions gaussianes bidimensionals Començarem en primer lloc pel problema bidimensional, en el qual suposem una variable (X,Y) de components gaussianes.

102
Distribucions conjuntes i marginals Suposant les dues components com gaussianes
( )( )yy
xx,N~Y,N~Xσμ
σμ
la funció de distribució conjunta s’escriu de la forma següent:
( ) ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
σ
μ−+⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
σ
μ−⎟⎟⎠
⎞⎜⎜⎝
⎛
σ
μ−ρ−⎟⎟
⎠
⎞⎜⎜⎝
⎛
σ
μ−
ρ−
−
ρ−σπσ=
2
y
y
y
y
xx
xy
2
xx
2xy2
xy21XY
yyx2
x
12
1exp12
1)y,x(f
en què ρxy és el coeficient de correlació lineal, que indica la relació lineal entre ambdues components. La distribució d’aquestes dues variables és una campana de Gauss el·líptica centrada al punt (μx, μy). Cada una de les components és una gaussiana, com es comprova calculant-ne la marginal, per exemple de la component X:
2x
2x
2)x(
xXYX e
21)y,x(f dy)x(f σ
μ−−∞
∞−σπ
== ∫
� [Leon-Garcia1994] p237-p238
� [Martorell2001a] p45
Interpretació geomètrica Geomètricament parlant, la distribució conjunta de (X,Y) és una campana de Gauss bidimensional el·líptica centrada al punt del pla (μx, μy). De fet, els punts del pla amb igual densitat de probabilitat són aquells que donen el mateix valor del terme de l’exponencial
2
y
y
y
y
xx
xy
2
xx yyx
2x
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
σ
μ−+⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
σ
μ−⎟⎟⎠
⎞⎜⎜⎝
⎛
σ
μ−ρ−⎟⎟
⎠
⎞⎜⎜⎝
⎛
σ
μ−
Fixem-nos-hi que en cas que no hi hagi relació lineal entre les components, és a dir, si ρxy = 0, el que queda és una el·lipse de semieixos paral·lels als eixos X i Y:
2
y
y2
xx yx
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
σ
μ−+⎟⎟
⎠
⎞⎜⎜⎝
⎛
σ
μ−
En qualsevol altre cas, l’orientació ve determinada pel valor de ρxy i de les dispersions, σx i σy.
� [Leon-Garcia1994] p238-p239 (vegeu especialment la figura 4.19)
� [Martorell2001a] p45

103
Distribucions condicionades En general, suposarem que les dues components X i Y no són independents. Per això, té sentit el càlcul de la distribució condicionada:
( ) ( ) ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡μ−
σ
σρ−
ρ−σ
−
ρ−πσ== μ−= x)y
yx
xy2xy
2x2
xy2xY
XYyYX y(x
12
1exp12
1)y(f
)y,x(f)x(f
Sobre aquesta expressió hi ha dues consideracions interessants a fer: d’entrada, fixem-nos com la condicionada també és una gaussiana, de mitjana i variància
[ ] [ ]
[ ] ( )2xy
2x
yyx
xyxx
1yYXVar
)y(yYXEyYXE
ρ−σ==
μ−σ
σρ+μ==μ==
En segon lloc, arribem a una de les propietats més importants de les distribucions gaussianes. Fixem-nos què passa si les dues components són decorrelades, és a dir, ρxy = 0. Aleshores, es compleix que
)x(fe2
1)x(f X2
)x(
xyYX
2x
2x
=σπ
= σ
μ−−
=
i, per tant, ambdues components són també independents. És aquest el primer cas que veiem en què correlació nul·la implica directament independència de variables, la qual cosa ja havíem vist que no és necessàriament cert.
� [Leon-Garcia1994] p239
� [Martorell2001a] p46
5.4.2 Generalització a n dimensions Fins ara hem calculat la distribució d’una variable gaussiana bidimensional. El cas particular és d’interès, sobretot perquè ens permet representar-ho gràficament i treure’n interpretacions geomètriques. A continuació generalitzarem les expressions trobades per un número qualsevol de dimensions.
Distribució conjunta n-dimensional Suposem, doncs una variable X = {X1,...,Xn} n-dimensional, amb mitjanes definides segons el vector corresponent:
( )n1 xxX ,...,μμ=μ

104
Les relacions entre cada una de les components venen determinades per l’anomenada matriu de covariàncies, que generalitza el coeficient de correlació per dues variables:
[ ] [ ] [ ][ ] [ ]
[ ] [ ] ⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
n2n
212
n1211
XVarX,XCov
XVarX,XCovX,XCovX,XCovXVar
K
��������
�
Donada aquesta matriu, la funció densitat de probabilitat conjunta s’escriu com
( )( )
( ) ( )⎭⎬⎫
⎩⎨⎧
μ−μ−−π
= − LXXKLXX21exp
K2
1x,...,xf 1T212nn1X
Aquesta funció també és una gaussiana, a més absolutament determinada per les seves mitjanes, variàncies i covariàncies.
� [Leon-Garcia1994] p240-p242
� [Martorell2001a] p46
PROBLEMA Donades (X,Y) gaussianes, calculeu l’angle que l’eix major de l’el·lipse fa respecte de l’eix de les X en funció de ρxy, σx i σy. Digueu què obtenim si ρxy = 0, i si es compleix σx = σy.
RESUM En aquesta sessió hem exposat les expressions necessàries per treballar amb variables gaussianes no unidimensionals. És a dir, tant per al cas bidimensional (en el qual a més hem realitzat algunes anàlisi geomètrics d’interès) com per al cas n-dimensional.
105
SESSIÓ 20: Problemes de regressió i correlació
FITXA DE LA SESSIÓ � Nom: Problemes de regressió i correlació � Tipus: de problemes � Format: no presencial � Durada: 4 hores � Material:
o ������������ ����
� ����������������
� ���������������
� ����������������
PRECEDENTS En les darreres sessions hem estudiat com calcular i interpretar geomètricament la relació entre les components d’una variable bidimensional (com a cas particular d’una n-dimensional), i a estimar models per modelar el seu comportament.
OBJECTIUS L’objectiu d’aquesta sessió és molt evident: presentar una sèrie de problemes resolts en la seva totalitat o en algun apartat que ajudin a comprendre els conceptes presentats fins ara, així com polir l’ús de la metodologia a emprar.
CONTINGUTS Presentarem tot un conjunt de problemes sobre els aspectes més representatius de la regressió i correlació de variables, tot fent especial èmfasi en algun cas particular tractat a nivell teòric amb prou amplitud, com és el cas de les variables gaussianes.
5.5 Problemes de regressió i correlació
5.5.1 Problemes sobre regressió lineal
Regressió lineal Suposem dues variables X i Y, restringides al domini
[ ][ ]1,0Y
1,0X∈
∈

106
Dins aquesta zona, la funció densitat de probabilitat conjunta val:
yx)y,x(fXY += Calculeu la regressió lineal i el coeficient de correlació lineal entre ambdues variables. El model lineal és un bon estimador?
Resolució (i): coeficient de correlació lineal Per calcular ρxy i la resta de magnituds necessàries, hem d’avaluar tot un conjunt d’esperances, per les quals necessitarem les funcions densitat marginals:
21y)yx(dx)y(f
21x)yx(dy)x(f
1
0Y
1
0X
+=+=
+=+=
∫
∫
Amb aquestes, és possible calcular les esperances necessàries:
[ ] [ ]
[ ] [ ]
[ ] ( )31...xyyxdydxXYE
YE125...x
21xdxXE
XE127...y
21ydyYE
1
0
1
0
21
0
22
1
0
==+=
===⎟⎠
⎞⎜⎝
⎛+=
===⎟⎠
⎞⎜⎝
⎛+=
∫∫
∫
∫
Amb tots aquests valors, ja som capaços de calcular el coeficient de correlació:
[ ] [ ] [ ] [ ][ ] [ ]( ) [ ] [ ]( ) 144
1
YEYEXEXE
YEXEXYEY,XCov2222yx
xy−
=−−
−=
σσ=ρ
Resolució (ii): recta de regressió i bondat de l’estimació Amb tots els càlculs anteriors, directament podem escriure la recta de regressió. Hem vist que l’expressió general és
( ) ( )xx
yxyy XY μ−σ
σρ=μ−

107
que en aquest cas es particularitza en
⎟⎠
⎞⎜⎝
⎛−−=⎟
⎠
⎞⎜⎝
⎛−
127X
111
127Y
El valor del coeficient de correlació ens indica que l’ajustament és molt dolent, doncs pràcticament no hi ha relació lineal entre les variables.
5.5.2 Problemes sobre corbes de regressió
Regressió donada la funció densitat de probabilitat conjunta Suposem dues variables X i Y en el primer quadrant, distribuïdes segons la següent funció densitat de probabilitat conjunta:
( )⎪⎩
⎪⎨⎧ ∞<<<=−
altrament ,0xy0 ,ey,xf
xXY
Calculeu el millor estimador en el sentit dels mínims quadrats (corba de regressió) i el seu coeficient de correlació.
Resolució (i): corba de correlació La millor aproximació es troba mitjançant l’equació
[ ] ( )∫+∞
∞−
==== yf y dyxXYEY~ xX|Y
i per tant el primer pas és trobar la densitat de probabilitat condicionada a X = x, per la qual necessitarem la marginal de X:
( ) ( )
( )( ) x
1
xe
exf
y,xf (y)f
xee dyy,xf dyxf
x
x
XXY
xX|Y
xx
0
xXYx
===
===
−
−
=
−−∞
∞−∫∫
Un cop coneguda la densitat de probabilitat condicionada, és possible calcular la corba de regressió:
( )2xy
x21y
x1 dyyf y dyY~
x
02
x
0xX|Y ==== ∫∫
∞
∞−
=

108
De la qual deduïm que el millor model per a les dades subministrades és un model lineal que coincideix, per tant, amb el que haguéssim trobat fent la regressió lineal.
� [Martorell2001b]
Resolució (ii): coeficient de correlació El fet que el millor model sigui lineal ens facilita el càlcul del coeficient de correlació, perquè sabem que aleshores es compleix
[ ]yx
xyxyY,XCov
σσ=ρ=η
Realitzant els càlculs corresponents, que deixem per l’usuari, trobem
21
xy =η
5.5.3 Distribucions gaussianes
Regressió de variables gaussianes Suposem tres variables independents amb distribució gaussiana
( )( )( )1,0N~Z
5,3N~Y
1,4N~X
Definim a partir d’aquestes dues noves variables com
YZVYXU
−=
+=
Calcula el millor model lineal que estima U en funció de V.
Resolució (i): coeficient de correlació Definim el coeficient de correlació com
[ ]vu
uvV,UCov
σσ=ρ

109
Segons les definicions de les noves variables,
[ ] [ ] [ ][ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] ( ) [ ] 6YVar1XVarYZVarVVar
6YVarXVarYXVarUVar
5YVar....VEUEUVEV,UCov
2u
u
=−+=−==σ
=+=+==σ
−=−==−=
i per tant el coeficient de correlació val
65
uv−
=ρ
Aquest valor ens indica que existeix una certa relació lineal entre les variables U i V, segons un model lineal donat per una recta que viurà majoritàriament sobre el segon i quart quadrants.
� [Martorell2001b]
RESUM En aquesta sessió hem presentat un conjunt de problemes resolts (en part o totalment) al voltant dels temes de regressió i correlació, tot fent especial èmfasi al cas particular de les variables gaussianes.

110
111
SESSIÓ 21: Definició, modelatge i propietats de processos estocàstics
FITXA DE LA SESSIÓ � Nom: Definició, modelatge i propietats de processos estocàstics � Tipus: teòrica � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS En les sessions precedents hem desenvolupat tota la metodologia necessària per calcular probabilitats sobre variables aleatòries en un nombre arbitrari de dimensions, així com per establir models que relacionin diferents variables a partir de les funcions conjuntes.
OBJECTIUS L’objectiu d’aquesta sessió és introduir-nos en el camp d’aquells processos en què la distribució d’una variable aleatòria pot variar. Plantejarem quines funcions caracteritzen ara un procés d’aquest tipus, la relació d’això amb el que hem vist fins ara i les propietats a determinar.
CONTINGUTS En primer lloc, estudiarem què és un procés estacionari i quines són les funcions que el caracteritzen. Després, presentarem les propietats d’alguns dels més importants.

112
6 Processos estocàstics
6.1 Definició, modelatge i propietats
6.1.1 Definició i model
Definició d’un procés estocàstic En alguns casos, el fenomen estudiat té un caràcter no determinista perquè és funció d’una o més variables aleatòries. Pot ser que la distribució d’aquesta magnitud variï a mesura que el sistema evoluciona. En general, definirem un procés estocàstic com una família indexada de variables aleatòries, {X1,...,Xn}. La interpretació més habitual serà aquella que associa el subíndex de la variable a l’instant de temps en què ha estat mesurada, tot i que no ha de ser a la força un índex temporal. De cara al tractament com una variable aleatòria, el més habitual serà imaginar-se cada Xj com la realització en l’instant ‘j’ de la variable X.
� [Leon-Garcia1994] p329-p332
Model del procés Per a una variable aleatòria d’una dimensió qualsevol tenim les funcions que caracteritzen la seva distribució. Quines funcions utilitzarem per caracteritzar un procés estocàstic? Siguin {X1,...,Xn} les variables aleatòries resultants de considerar el procés X(t) en els instants de {t1,...,tn}. A partir d’aquí, definirem l’ordre de la funció de distribució com el nombre d’instants de temps que involucra. Per exemple, la funció de distribució de primer ordre de X(t) és:
[ ]1111X x)t(XXP)x(F 1 ≤== i evidentment es pot generalitzar a un nombre qualsevol d’instants de temps, per una funció de distribució d’ordre n:
[ ]nn11n1X···X x)t(X,...,x)t(XP)x,...,x(F n1 ≤≤= Igualment, es pot definir la funció de probabilitat o densitat de probabilitat,
)x,...,x(f n1X···X n1
� [Leon-Garcia1994] p333-p334
� [Martorell 2001a] p47

113
6.1.2 Propietats A continuació estudiarem dues propietats essencials d’alguns processos estocàstics, relacionades amb la seva evolució temporal: l’estacionarietat d’un procés i la relació entre els increments temporals, i la possibilitat de modelar-lo directament a partir del valor en l’instant anterior.
Independència d’increments i estacionarietat En primer lloc, definim X(t) com un procés d’increments independents si per un conjunt d’instants de temps t1<t2<...<tn, les variables
{ })t(X)t(X),...,t(X)t(X ),t(X)t(X 1nn2312 −−−− són variables aleatòries independents. A més, hi ha processos en què per estudiar-ne l’evolució necessitem l’increment temporal produït, però independentment dels instants inicial i final. Direm que aquest procés té els increments estacionaris, i matemàticament complirà
)t(X)tt(X)t(X)t(X jiji Δ=−=−
� [Leon-Garcia1994] p343-p344
� [Martorell 2001a] p48
Processos de Markov Els processos de Markov són aquells en què l’estat present depèn només de l’estat immediatament anterior i de la pròpia evolució del sistema. Per un cert procés determinista, diríem que existeix un operador T que indica com evoluciona el sistema d’un instant al següent:
1kk X TX −= relació que es pot portar fins a la condició inicial:
0k
k X TX = En un procés estocàstic té sentit parlar de com evoluciona la funció que el caracteritza com a variable aleatòria en cada instant de temps. Per un procés de Markov es compleix
( ) ( )1k1kkX2k2k1k1kkX xXxf,...xX,xXxf kk −−−−−− ==== És a dir, tan sols el valor anterior del procés importa per determinar propietats del valor actual.
� [Leon-Garcia1994] p334
� [Martorell 2001a] p48
114
RESUM En aquesta sessió hem introduït els conceptes bàsics per a l’estudi dels processos estocàstics, incloent-hi la seva definició. Finalment, hem estudiat dues de les propietats més importants que presentaran alguns d’ells, relacionades amb els instants de realització.
115
SESSIÓ 22: Processos de Poisson i senyal telegràfic
FITXA DE LA SESSIÓ � Nom: Processos de Poisson i senyal telegràfic � Tipus: teòrica � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
o �������������������������
� � ��!�� ��"���
� ����������������
PRECEDENTS En la sessió anterior vàrem introduir-nos en l’estudi dels processos estocàstics descrivint les funcions i magnituds amb les quals caracteritzem un procés estocàstic, a més d’algunes de les propietats més importants a estudiar.
OBJECTIUS L’objectiu d’aquesta sessió és el d’estudiar dos dels exemples més habituals en els processos estocàstics que apareixen en el món de l’enginyeria: els processos de Poisson, i el problema del senyal telegràfic.
CONTINGUTS De cada un dels dos processos estudiats en aquesta sessió, en mostrarem l’origen del problema, la seva aplicabilitat, la manera de modelar les probabilitats en cada instant i les seves propietats bàsiques.
6.2 Processos de Poisson i senyal telegràfic
6.2.1 Processos de Poisson Suposem un fenomen que consisteix en un cert esdeveniment que passa λ vegades per unitat de temps (per exemple, el nombre de partícules que es desintegren per segon en una mostra d’urani, o el nombre de treballs que arriben a la cua d’una impressora en una hora).

116
Construcció del model Per tal d’estudiar-lo, definim la variable N(t) que compta el nombre de successos ocorreguts en un interval [0,t]. L’objectiu que perseguim és trobar la distribució que segueix aquesta variable, per tal de preguntar-nos sobre la probabilitat que prengui un valor en un cert instant t. Per construir el model, realitzem unes suposicions detallades a la bibliografia, que ens permeten estudiar aquest procés com n processos de Bernouilli independents, un en cada interval de temps amb què discretitzem l’interval [0,t]. En el límit, el procés es pot modelar amb una variable N(t) tipus Poisson, de paràmetre característic α = λ t. Per tant,
[ ] ( ) tk
e!k
tk)t(NP λ−λ=
� [Leon-Garcia1994] p346-p347
� [Martorell 2001a] p48-p49
Propietats d’un procés de Poisson Un procés de Poisson és un procés en què es compleixen les propietats d’independència i estacionarietat d’increments, definides anteriorment. Això permet calcular la probabilitat conjunta, és a dir, la probabilitat de trobar certs resultats en dos instants de temps diferents:
[ ] [ ] [ ] ( ) ( )( ) )tt(ij
21ti
112121 121 e
)!ij(tt
e!i
tij)tt(NPi)t(NPj)t(N,i)t(NP −λ−
−λ−
−
−λλ=−=−====
D’altra banda, és interessant preguntar-se per quina és la probabilitat que passi un cert temps entre dos successos consecutius. Definim T com una variable que mesuri el temps entre successos consecutius. Seguint els raonaments que han portat a concloure que aquest és un procés de Poisson, es pot dir que
[ ] ( )n
0n0 n
t1p1tTP ⎟⎟
⎠
⎞⎜⎜⎝
⎛ λ−=−=>
En el límit, [ ] 0t0
netTPlim λ−
∞→=>
És a dir, la probabilitat que el temps entre successos sigui major que t0 segueix una distribució exponencial de paràmetre λ. Per tant, clarament disminueix a mesura t0 augmenta.

117
Finalment, una altra propietat interessant sobre els processos de Poisson és el fet que els successos ocorren aleatòriament: suposem que sabem que s’ha produït un succés en l’interval de temps [0,t0]. La probabilitat que s’hagi produït en l’interval [0,x0] val:
[ ]0
00 t
xxXP =≤
� [Leon-Garcia1994] p347-p350
� [Martorell 2001a] p49-p50
6.2.2 Senyal telegràfic Molts problemes que sovint apareixen en el camp de l’enginyeria són variacions del que per raons històriques s’anomena el problema del senyal telegràfic: sigui X(t) la variable que representa un procés que pot prendre valors +1 o -1, i per la qual suposarem equiprobabilitat inicial, estrictament per simplicitat: X(0)=+1 o bé X(0)=-1 amb probabilitat p = 1/2. De l’evolució només sabem que α és el nombre de vegades per unitat de temps que, en mitjana, el senyal canvia de valor.
Probabilitats sobre l’evolució Per tal de ser capaços de calcular la probabilitat que el senyal prengui un valor o un altre, intentarem en primer lloc calcular la probabilitat que, havent començat en un cert valor, el senyal hagi mantingut o canviat el seu valor. És a dir, que el canvi de valor s’hagi produït un número parell o senar de vegades. Si N(t) és una variable que mesura el nombre de canvis des de l’inici fins a l’instant t, es pot considerar un procés de Poisson de paràmetre αt. Això ens permet calcular la probabilitat que el senyal hagi mantingut el valor:
[ ] [ ] ( )( )
( )t2
0j
tj2
e121...e
!j2tparell)t(NP1)0(X1)t(XP α−
∞
=
α− +==α
===±=±= ∑
I també que l’hagi canviat:
[ ] [ ] ( )( )
( )t2
0j
t1j2
e121...e
!1j2tsenar)t(NP1)0(X1)t(XP α−
∞
=
α−+
−==+
α===±== ∑∓
� [Leon-Garcia1994] p350-p351
� [Martorell 2001a] p50

118
Funció probabilitat i característiques Amb els càlculs fets anteriorment ja és possible calcular el valor de la funció probabilitat de X(t), és a dir, la probabilitat que X(t) prengui un valor +1 o -1:
[ ] [ ] [ ]
( ) ( )21e1
21
21e1̀
21
21
1)0(X1)t(XP211)0(X1)t(XP
211)t(XP
t2t2 =−++=
=±==+±=±==±=
α−α−
∓
Aquest resultat era d’esperar per la manera com hem modelat el problema: hem suposat que la probabilitat inicial era la mateixa per als dos resultats possibles, i a més hem considerat el paràmetre α (nombre de canvis per unitat de temps) independent del sentit del canvi de valor. Aquest resultat ens porta a poder calcular de manera senzilla l’esperança i variància del valor del senyal en un cert instant:
[ ] [ ] [ ][ ] [ ] [ ] 11)t(XP)1(1)t(XP)1()t(XVar
01)t(XP)1(1)t(XP)1()t(XE22 =−=−++=+=
=−=−++=+=
Amb la qual cosa resulta que X(t) és una variable tipificada.
� [Leon-Garcia1994] p350-p351
� [Martorell 2001a] p50-p51
RESUM En aquesta sessió hem presentat dos dels exemples més habituals de processos estocàstics, realitzant els raonaments necessaris per construir el model i analitzant-ne les principals propietats, de cada un d’ells.

119
SESSIÓ 23: Processos de suma i random walk
FITXA DE LA SESSIÓ � Nom: Processos de suma i random walk � Tipus: teòrica � Format: no presencial � Durada: 2 hores � Material:
o ������������ ����
� ����������������
� ���������������
PRECEDENTS En la sessió anterior hem definit sota quines condicions un procés pot ser considerat un procés de Poisson o un senyal telegràfic, i quines en són les seves propietats.
OBJECTIUS En aquesta sessió presentarem un nou cas d’interès, els processos de suma, i algunes de les seves derivacions d’interès. En particular, presentarem com modelar el moviment atzarós en un determinat nombre de dimensions (random walk) i en quines condicions pot ser considerat un procés de Wiener.
CONTINGUTS En primer lloc, Continguts a tractar en aquesta sessió. Continguts a tractar en aquesta sessió. Continguts a tractar en aquesta sessió. Continguts a tractar en aquesta sessió.
6.3 Processos de suma
6.3.1 Processos de suma Suposarem n variables aleatòries independents i idènticament distribuïdes. Podem definir la variable suma com
n1n X...XS ++=
Propietats Sn és una nova variable aleatòria que procés compleix el fet de ser un procés de Markov, perquè
n1nn XSS += −
120
també compleix la propietat d’increments independents. És a dir, si
3210 nnnn <<< les variables
23
01
nn
nn
SS
SS
−
−
són independents. A més, també compleix la propietat d’increments estacionaris:
[ ] [ ]ySPySSP n'nn'n ===− −
� [Leon-Garcia1994] p341-p343
� [Martorell 2001a] p51
Probabilitat conjunta A causa d’aquestes propietats, és possible calcular la probabilitat conjunta d’una variable Sn en dos instants, n1 i n2:
[ ] [ ][ ]12nn1n2n1n yySPySPyS,ySP 12121 −===== − expressió que es pot generalitzar com:
[ ] [ ] [ ]1kknn1nkn1n yySP....ySPyS,...,ySP 1kk1k1 −− −=====−
� [Leon-Garcia1994] p343-p344
� [Martorell 2001a] p51-p52
6.3.2 Random walk i processos de Wiener En aquest apartat intentarem construir models per a l’estudi del moviment d’un cos del qual coneixem la distribució de probabilitats que controlen el seu moviment.
Model discret unidimensional Imaginem el moviment d’una partícula en una dimensió. Aquest pot ser modelat d’un manera molt senzilla dient que en cada instant de temps l’objecte pot avançar una unitat amb una probabilitat p, i retrocedir una unitat amb probabilitat 1-p. Per tant, segons aquest senzill model, la variable Xn que caracteritza la variació de posició en l’instant n pot valer +1 o -1. Seguint aquest model, el moviment de l’objecte ve donat

121
per un procés de suma: definim la variable Sn que expressa la posició del cos per cada instant t = n com
n1n X...XS ++= Aquesta variable és una variable suma, de la qual hem definit anteriorment les seves característiques.
� [Leon-Garcia1994] p341-p342
� [Martorell 2001a] p52
Model continu Les consideracions fetes pel model discret les podem repetir per una model continu, més proper a la realitat, de la següent manera: suposem que els intervals temporals prenen un valor δ petit, i que en cada un d’aquests interval el cos avança una quantitat h. Aleshores, la posició Xn de l’objecte ve definida per:
( ) nn1 hSX...Xh)t(Y =++= Aquest model descriu una evolució en temps continu en el límit en què δ tendeix a 0 i h també ho fa.
� [Leon-Garcia1994] p354
� [Martorell 2001a] p52-p53
Procés de Wiener Per cada problema en concret, la relació entre δ i h (el que en diríem la velocitat) determina el comportament del sistema. Un cas concret és la relació que s’utilitza per estudiar el moviment brownià, que apareix en l’estudi del moviment de partícules surant en un fluid (per exemple). La relació ve determinada pel que es coneix com a procés de Wiener:
δ∝2h En aquest cas, també és possible estudiar la distribució de la variable que indica la posició de la partícula, Y(t). Totes aquestes consideracions accepten la seva extrapolació a més dimensions.
� [Leon-Garcia1994] p354-p356
� [Martorell 2001a] p53
122
PROBLEMA Essent Sn la variable que expressa la posició d’un objecte en l’instant t = n, tal com s’ha exposat en el model discret de random walk, calculeu la funció de probabilitat de Sn.
PROBLEMA Demostreu que, si Y(t) és la posició d’una partícula en un procés de Wiener, )y(f )t(Y segueix una distribució gaussiana, i digueu de quina esperança i variància.
RESUM En aquesta sessió hem presentat el procés de suma com un nou exemple de procés estocàstic, i una de les seves aplicacions com a eina per a construir models de moviment unidimensionals.
123
SESSIÓ 24: processos estacionaris
FITXA DE LA SESSIÓ � Nom: processos estacionaris � Tipus: teòrica � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
PRECEDENTS En les sessions precedents hem presentat aquells conceptes necessaris per a l’estudi dels processos estocàstics i les seves propietats en algun instant de temps, així com alguns dels casos particulars de més interès.
OBJECTIUS L’objectiu d’aquesta sessió és analitzar propietats temporals dels processos. És a dir, definir quines magnituds parlen de la relació entre els valors d’un procés en diferents instants de temps, i com es relacionen aquestes magnituds amb les distribucions dels processos.
CONTINGUTS En la primera part d’aquesta sessió exposarem aquelles magnituds que quantifiquen la relació entre valors en diferents instants d’un procés estocàstic. En una segona part, definirem el concepte d’estacionarietat i veurem com es relacionen amb aquestes magnituds.
6.4 Propietats en temps diferents
6.4.1 Propietats en temps diferents Els moments de la variables que defineix el procés, X(t), en diferents instants de t poden ser utilitzats per caracteritzar parcialment el procés, ja que resumeix la informació que conté la funció de distribució conjunta del procés en aquells instants.
Autocorrelació i autocovariància De manera anàloga a com definíem els moments conjunts per les components d’una variable bidimensional, és possible definir magnituds que quantifiquin la relació entre

124
X(t1) i X(t2). Una possibilitat és definir el moment conjunta, que anomenarem autocorrelació:
[ ] ∫∫Ω
== )y,x(dxdyxyf)t(X),t(XER )t(X)t(X21)t,t(X 2121
o bé fer el mateix centrant a la mitjana les variables X(t1) i X(t2), i ho anomenarem autocovariància:
( )( )[ ] 21)t,t(X2211)t,t(X 2121 R)t(X)t(XEC μμ−=μ−μ−=
� [Leon-Garcia1994] p335
� [Martorell 2001a] p54
Correlació i covariància De manera semblant, és possible definir la relació entre diferents processos en els instants t1 i t2. Es defineix la correlació creuada entre els processos X(t) i Y(t), en els instants t1 i t2:
[ ])t(Y)t(XE)t,t(R 2121xy = que permet definir la ortogonalitat de processos com aquell cas en què dos processos tenen la correlació creuada nul·la per qualsevol instants (t1,t2). La covariància creuada es defineix de la mateixa forma amb les variables centrades a la mitjana:
( )( )[ ] 2121 YX21XYY2X121xy )t,t(R)t(Y)t(XE)t,t(C μμ−=μ−μ−= Diem que dos processos són incorrelats quan
0)t,t(C 21xy = .
� [Leon-Garcia1994] p337
� [Martorell 2001a] p54
6.5 Processos estacionaris
6.5.1 Processos estacionaris Hi ha processos en què el seu caràcter aleatori (i no el seu valor) no varia en el temps. L’objecte d’aquest apartat és analitzar quines magnituds caracteritzen aquests processos i de quina manera es poden estudiar.

125
Definició Intuïtivament, diem que X(t) és un procés estacionari si mostra el mateix comportament per un mostreig {t1,...,tk} per un altre { }τ+τ+ k1 t,...,t , amb τ qualsevol. Matemàticament, això vol dir que es compleix
)x,...,x(F)x,...,x(F k1X...Xk1X...X kt1tkt1t τ+τ+=
per a qualsevol mostreig i interval τ. És a dir, la distribució conjunta del procés en qualsevol conjunt d’instants de temps no varia si es desplaça l’origen de temps.
� [Leon-Garcia1994] p356
� [Martorell 2001a] p54-p55
Propietats Els processos estacionaris tenen una funció de distribució de primer ordre (és a dir, referida a un instant de temps) independents del temps:
)x(F)x(F)x(F X)t(X)t(X == τ+ amb la qual cosa els moments referits a un sol instant de temps són constants. Per exemple,
[ ]
[ ] ( )[ ] 2X
2X
X)t(X
)t(XE)t(XVar
)t(XE
σ=μ−=
μ==μ
Igualment, la funció de distribució conjunta a dos instants només depèn de la diferència entre aquests dos instants i d’una condició inicial:
)x,x(F)x,x(F 21)tt(X)0(X21)t(X)t(X 1221 −= i això fa que aquesta propietat també la compleixin aquelles magnituds que depenen de dos instants:
)tt(C)t,t(C
)tt(R)t,t(R
12X21X
12X21X−=
−=
� [Leon-Garcia1994] p356-p358 (especialment vegeu l’exemple 6.28)
� [Martorell 2001a] p55

126
Estacionarietat en sentit ampli (WSS) Sovint, però, no ens és gens fàcil determinar si les funcions de distribució compleixen aquestes propietats. En canvi, és més senzill treballar directament sobre l’esperança, covariància, etc. Per això es defineix un procés estacionari en sentit ampli (WSS) si
)tt(C)t,t(C 12X21X
X)t(X
−=
μ=μ
En general, tot procés estacionari ho és en sentit ampli, però a l’inrevés no és cert. Per a casos particulars, com una distribució gaussiana, ambdues afirmacions són equivalents, perquè aquesta està completament determinada pels moments de primer i segon ordre.
� [Leon-Garcia1994] p358-p362
� [Martorell 2001a] p55-p56
PROBLEMA Suposem els processos
( )( )ϕ+ω=
ϕ+ω=
tsin)t(Ytcos)t(X
en què φ és una variable uniformement distribuïda entre -π i π. Indiqueu quina condició han de complir t1 i t2 perquè la correlació creuada entre aquests dos processos sigui nul·la. Interpreteu el resultat obtingut.
RESUM En aquesta sessió hem presentat aquelles magnituds que quantifiquen el comportament dels processos estocàstics en diferents instants de temps. S’ha definit què compleix un procés estacionari, i en quins casos un procés és estacionari en sentit ampli.
127
SESSIÓ 25: Problemes de processos estocàstics
FITXA DE LA SESSIÓ � Nom: Problemes de processos estocàstics � Tipus: de problemes � Format: no presencial � Durada: 3 hores � Material:
o ������������ ����
� ����������������
� ���������������
� ����������������
PRECEDENTS En les anteriors sessions, hem desenvolupat les eines per treballar el que hem anomenat processos estocàstics. És a dir, conjunts de variables aleatòries indexades, que sovint utilitzem per estudiar l’evolució temporal d’un sistema amb comportament no determinista.
OBJECTIUS L’objectiu d’aquesta sessió és, mitjançant un conjunt de problemes resolts en part o totalment, donar les pistes per clarificar els conceptes bàsics d’aquest tema, i veure com s’utilitzen aquestes magnituds per a la descripció d’un problema real.
CONTINGUTS Mostrarem un conjunt de problemes separats en dos apartats: d’una banda, aquells que tracten de les característiques dels processos coneguts (suma, Poisson, etc.); i d’altra banda, aquells en els quals ens centrarem en parlar de les propietats en temps diferents.
6.6 Problemes de processos estocàstics
6.6.1 Característiques dels processos Plantegem en aquest apartat un parell de problemes sobre dos tipus comuns de processos estocàstics (tipus Poisson i de mitjana mòbil), i ens dediquem a calcular el valor de les seves principals característiques.

128
Procés de Poisson Suposem que les trucades que es fan a la secretaria d'una empresa segueixen una distribució de Poisson, amb una mitjana de 10 trucades per hora. Si el secretari està fora el primer i el darrer quart d'una determinada hora, calculeu la probabilitat que totes les trucades en aquella hora obtinguin resposta.
Resolució Poisson (i): paràmetre i condicions Com que és un procés de Poisson, la magnitud essencial és el paràmetre del procés, que en produir-se 10 trucades per hora, val:
-110h=λ La concisió del problema és que totes les trucades rebin resposta. Això serà així si
⎥⎦
⎤⎢⎣
⎡∈
43,
41t
Per tant, no pot haver-hi cap trucada per
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠
⎞⎜⎝
⎛∈
⎟⎠
⎞⎜⎝
⎛∈
1,43t
41,0t
Resolució Poisson (ii): càlcul probabilitat Amb les propietats d’un procés de Poisson (independència i estacionarietat d’increments):
[ ] ( ) ( ) ( ) ( )2
1 0NP...0NN , 0NPrespostaobtinguin trucadesles totesP4
14
34
1 ⎥⎦⎤
⎢⎣⎡ ===⎥⎦
⎤⎢⎣⎡ =−==
Coneixent la funció de probabilitat per un problema de Poisson, i el valor del paràmetre característic per aquest problema,
( )[ ] ( ) ( ) t10k
tk
t e!kt10e
!kt kNP −λ− =λ
==
calculem la probabilitat que el problema ens demana:
[ ] 210
erespostaobtinguin trucadesles totesP−
=
� [Martorell2001b]

129
Procés MA Un altre procés interessant no estudiat a la part teòrica del curs és el procés de mitjana mòbil (MA), en el qual la variable estudiada es construeix a partit de la combinació de valors consecutius d’una altra variable. Per exemple, considerem el procés
( )
0X X31X
32Z
0X XX21Y
01nnn
01nnn
=+=
=+=
−
−
Calculeu la mitjana, variància i covariància de Yn i Zn, considerant Xn un procés de Bernoulli amb probabilitat d'èxit p.
Resolució MA (i): esperança i variància L’esperança i variància d’un d’aquests processos (per exemple el Yn) es pot calcular de la següent forma:
[ ] [ ] [ ]
[ ] [ ] [ ] ( ) ( ) ( )p1pp1p21p1p
21XVar
21XVar
21YVar
p...XE21XE
21YE
1nnn
1nnn
−=−+−=+=
==+=
−
−
Resolució MA(ii): covariància Per a les magnituds sobre instants de temps diferents, com per exemple la covariància, el càlcul requereix algun pas intermedi més. Per exemple, calculem la correlació de Yn:
( ) [ ] ( )⎥⎦⎤
⎢⎣
⎡⋅+⋅+⋅+⋅=⋅= −−−− 1k1nk1n1knknknY XXXXXXXX
41EYYEk,nR
Necessitem saber l’esperança dels productes de valors de Xn referits a instants de temps diferents. Hi ha quatre possibilitats respecte dels valors que poden prendre aquests productes:
( )( )( )
2
2knkn
p111p1p010p1p001
p1000ProbXXXX
−
−
−
⋅
Un cop sabem els valors possibles si les seves probabilitats associades, podem calcular el valor de l’esperança de Xn·Xk, que dependrà de si n és igual a k o no:

130
[ ]( )
[ ]⎪⎪
⎩
⎪⎪
⎨
⎧
===
≠===∑=
kn si p...XE
kn si p...PXXXXE
2n
24
1jjjkn
kn
D’aquesta manera, el resultat variarà en funció de quants termes amb igual o diferent índex tindrem dins de la fórmula del coeficient de correlació:
( )
( )
( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
±=+
=+
=
altres p
1kn si pp341
kn si p1p21
k,nR
2
2Y
El pas de la correlació a la covariància és automàtic sabent que
( ) ( ) knYY k,nRk,nC μμ−=
� [Martorell2001b]
6.6.2 Estacionarietat Els problemes proposats a continuació són referents al càlcul de propietats d’estacionarietat de processos estocàstics.
Estacionarietat d’un procés Sigui X, Y1, Y2 variables aleatòries independents; X és uniforme a [0,1] i Y1, Y2 són gaussianes N(0,1). Es defineix el procés Z(t) = X+Y1sin t+Y2cos t. a) Calculeu l’esperança del procés Z; b) Calculeu la correlació de Z en els instants t1 i t2; c) El procés Z(t) és estacionari? Justifiqueu la resposta.
Resolució estacionarietat (i): esperança El càlcul de l’esperança del procés és directe, tenint sempre en compte que la variable temporal no és una variable aleatòria i, per tant, no es veu afectada per l’operador esperança:
( )[ ] [ ] [ ] [ ] [ ]210 tcos0sin t
21yEt cosyEtsin xEt cosytsin yxEtzE 2121 =⋅+⋅+=++=++=

131
Resolució estacionarietat (ii): correlació De la mateixa manera, el coeficient de correlació:
( ) ( ) ( )[ ] ( )( )[ ][ ] ( ) [ ] ( ) [ ] [ ] ...tsin tsin yExyEt cost cosxyEtsin tsin xE
t cosytsin yxt cosytsin yxEtztzEt,tR
212
12121122
222112112121Z
++++++=
++++==
Que utilitzant les fórmules trigonomètriques es pot expressar com:
( ) ( )12212121Z tt cos31t cost costsin tsin
31t,tR −+=++=
Per tant, com l’esperança és una constant (no depèn del temps) i la correlació només depèn de la diferència d’instants de temps, podem dir que el procés és estacionari en sentit ampli.
� [Martorell2001b]
PROBLEMA Anomenem X(t) al senyal telegràfic aleatori estudiat, i sigui Y(t) un procés basat en X(t) de la següent forma: cada cop que X(t) canvia de polaritat, Y(t) canvia de polaritat amb una probabilitat p. a) Trobeu P[Y(t)=±1]. Quin tipus de procés és Y(t)?; b) Trobeu l'autocovariància de Y(t) i compareu-la amb la de X(t).
RESUM En aquesta sessió hem mostrat la resolució d’un conjunt de problemes sobre processos estocàstics, també hem mostrat algun dels aspectes més importants d’aquest tema, com les característiques del procés, les propietats a temps diferents o l’estacionarietat d’un procés.

132

133
Annex
PROBLEMES
Problema 1 La densitat de probabilitat de primer ordre d’un procés estocàstic x(t) és
� �� � ��
������� �
��
����
mentre que la de segon ordre compleix que
� ��� ��� ��� �� � � ��� �� ���� � ��� �� � ��� quan t2 - t1 > 0 i val 0 altrament. Quant val autocorrelació �x(t1)x(t2)�?
Solució L’autocorrelació es defineix com
� �� ����� � ��� �������� ��� ��� ��� �� �
�
��
�
��
En el nostre cas, definirem x1 com aquell que correspongui al temps inferior. Suposem que és t1: ens queda,
� �� ����� � ��� �������� ��� ��� � �� � ��� �� � �� � ����
��
�
��
Si ara fem el canvi de variables x1 = u i x2 = u + v dins la integral, tindrem
� �� ����� � �� ��� � � � � �� �� ���� �� � �����
��
�
��
Aquesta integral la podem descompondre així
� �� ����� � �������� ��� ��� �� �� � ��
�
��
�
��
� ������� ��� ���� �� �� � �� �
�
��
�
��
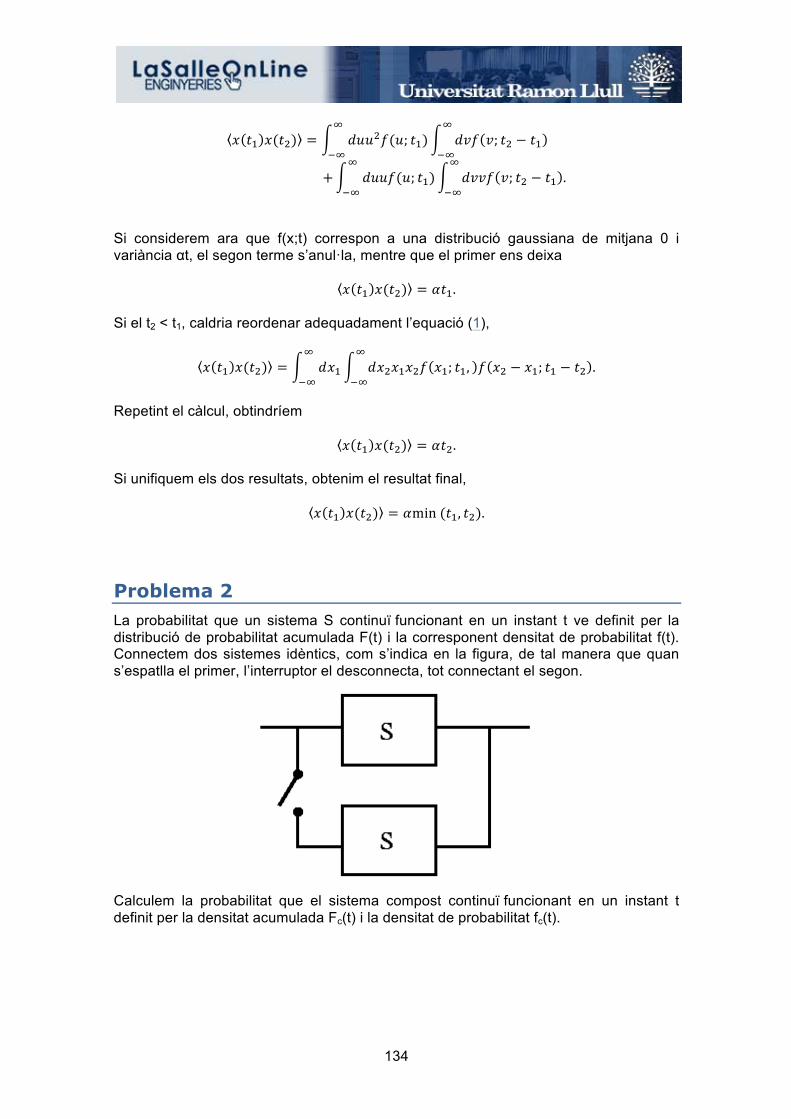
134
� �� ����� � �������� ��� ��� �� �� � ��
�
��
�
��
� ������� ��� ���� �� �� � �� �
�
��
�
��
Si considerem ara que f(x;t) correspon a una distribució gaussiana de mitjana 0 i variància αt, el segon terme s’anul·la, mentre que el primer ens deixa
� �� ����� � ���� Si el t2 < t1, caldria reordenar adequadament l’equació (1),
� �� ����� � ��� �������� ��� ��� � �� � ��� �� � �� �
�
��
�
��
Repetint el càlcul, obtindríem
� �� ����� � ���� Si unifiquem els dos resultats, obtenim el resultat final,
� �� ����� � ��������� ����
Problema 2 La probabilitat que un sistema S continuï funcionant en un instant t ve definit per la distribució de probabilitat acumulada F(t) i la corresponent densitat de probabilitat f(t). Connectem dos sistemes idèntics, com s’indica en la figura, de tal manera que quan s’espatlla el primer, l’interruptor el desconnecta, tot connectant el segon.
Calculem la probabilitat que el sistema compost continuï funcionant en un instant t definit per la densitat acumulada Fc(t) i la densitat de probabilitat fc(t).

135
Solució Perquè el sistema compost continuï funcionant en l’instant t, cal que el primer component hagi funcionat fins l’instant t′ < t i el segon ho hagi fet des de l’instant t′ fins al t, amb una durada total t - t′. Com que els dos components s’espatllen de manera independent, la densitat de probabilitat conjunta que el primer component hagi funcionat una durada t′ i el segon una durada t - t′ serà,
� ��� � � �� � � �� � � � �� � Per tant, per obtenir la densitat de probabilitat que el sistema compost funcioni una durada t, caldrà integrar sobre tots els valors possibles de t′. Ens quedarà,
�� � � ���� ��� � � �� � ���� �� � � � �� �
�
�
�
�
Problema 3 Sigui X una variable aleatòria exponencial de constant λ. Considerem el canvi de variable Y = 1⁄X. Calculem la densitat de probabilitat de la variable aleatòria Y .
Solució Si X és una variable aleatòria amb densitat de probabilitat fX(X) i tenim una variable aleatòria Y = h(X), la densitat de probabilitat de Y , es relaciona amb la de X per la fórmula,
�� � �����
���
�� � � �
si h(x) és una funció monòtona. En el nostre cas, X té una distribució exponencial,
�� � � ����� � Per altra banda,
� � � � ��
�� � � � ��� � �
�
��
i per tant,
����
���
� ����

136
Agrupant aquests resultats, obtenim la solució
�� � � ���� ��� ��� �
Problema 4 Una memòria guarda paraules de 3 bits més un bit de paritat. Cada bit te probabilitat 1 3 de canviar de valor independentment dels altres. Quina és la probabilitat que la paraula hagi canviat i la comprovació de paritat sigui correcte ?
Solució Per tal que la comprovació de paritat sigui correcta i la paraula hagi canviat, cal que hagin canviat, o bé dos bits o bé tots quatre bits. La probabilitat que dos bits hagin canviat i dos hagin restat iguals és
� � ��
�
�
�
� �
�
�
���
���
El nombre combinatori ens permet de cobrir totes les possibilitats de bits que canvien. La probabilitat que canviïn els quatre bits és
� � ��
�
�
��
���
En total,
� � � � � � � ���
���
Si volem calcular la probabilitat condicionada que la paraula hagi canviat, si la verificació de paritat és correcta, caldrà dividir el resultat anterior per la probabilitat que la verificació de paritat sigui correcta. Aquesta correspon al succés en què no canvia cap bit, o en canvien 2 o en canvien 4:
���� � � � � � � � � � � Cal calcular doncs la probabilitat que no canviï cap bit,
� � ��
�
�
���
���

137
Així, ens queda,
���� ���
���
Finalment, la probabilitat condicionada serà
�� ��
�������
���
Problema 5 El bus can és un bus de comunicacions molt utilitzat en el món de l’automoció i transmet dades a una velocitat de 500 kbit�s-1. Els nodes del bus estan identificats (en el cas no estès) per un número binari de 11 xifres. Quan un node té una trama per enviar mira si el bus està ocupat. Si ho està, espera que es desocupi, i si no ho està, envia la trama. Si dos nodes volen enviar una trama alhora, es queda el bus aquell que té un número identificador més baix. El format de les trames consta d’una capçalera de 20 bits, fins a 8 bytes de dades i finalment 15 bits de CRC i 2 bits d’ACK. Suposem que el nombre de nodes que volen accedir a la xarxa durant un interval de temps ve descrit per una distribució de Poisson de constant λt. Suposem també que la distribució de probabilitat del nombre de dades en les trames del bus és uniforme. Suposem, finalment que tots els nodes d’una xarxa tenen la mateixa probabilitat d’enviar una trama en un moment donat.
1. Calcular la distribució de probabilitat que una trama tingui una durada t. 2. Calcular la probabilitat de tenir n nodes en espera mentre s’envia una trama.
Quin és el nombre mitjà de nodes en espera? 3. Quina és la densitat de probabilitat de trobar la xarxa desocupada en un instant
t després que s’acabi una trama. 4. Comentar fins a quin punt és correcte aproximar amb una distribució de
Poisson el nombre de nodes que volen accedir a la xarxa.
Solució El mínim nombre de bits que conté una trama correspon al cas en què no enviem cap dada. Tenim aleshores,
���� � �� � �� � � � ��� El màxim correspon al cas en què emprem els 8 bytes de dades:
���� � �� � �� � � � � � � � ���� L’enunciat ens indica que la distribució de probabilitat del nombre de dades en les trames del bus és uniforme. Per tant, la probabilitat que una trama contingui N bits serà

138
���� �
�
����� � � � ����
����������
De la velocitat del bus, deduïm que el temps que es triga a enviar un bit és 2 μs. El temps per enviar la trama mínima serà doncs tmin = 74μs i el d’enviar la trama màxima tmax = 202μs. Per tant, la probabilitat que la durada d’una trama sigui t correspon a una distribució discreta,
���� �
�
���� � � � � � ����������� � � � ����
����������
Per tal de simplificar futurs càlculs, podem aproximar la distribució discreta per una contínua uniforme. En aquest cas, tindrem
� � �
�
���� � ������������ � � � ���� �
����������
������������ � ���� ���� � � ��� � ����
�����������
Amb aquest resultat, responem a la primera pregunta. Si ara volem calcular la probabilitat de tenir n nodes en espera mentre s’envia una trama, pel teorema de la probabilitat total, aquesta serà
� � � ���� � � � � �
�
��
en què p(t) és la densitat de probabilitat que la trama tingui una durada t (l’acabem de calcular) i p(n|t) és la probabilitat que n nodes vulguin accedir a la xarxa durant un temps t (ens la dóna la distribució de Poisson). D’aquí deduïm que
� � � ��
����
����
�
���� � ����
�
����������� �
Tot i que aquesta integral es pot calcular exactament, farem l’aproximació d’estendre’n els límits de 0 a ∞1,
� � � �� � � ����
���� � ����
�
����������� �
�
�
Si ara resolem la integral, fent un canvi de variable x = λt
�� � � ��
���� � ����
�
������������� � �
�
� ���� � ����
�
����������
�
�
�
�
�

139
Integrant per parts, podem anar baixant la potència xn dins la integral. Finalment, ens quedarà,
�� � � ��
� ���� � ����
�
���� �
�
� ���� � ����
La probabilitat aproximada que obtenim és doncs constant ! En aquestes condicions, no es pot calcular el nombre mitjà de nodes en espera,
� � �� � �
�
���
ja que ens sortirà infinit. Per respondre al tercer apartat, només cal considerar que calcular la probabilitat que la xarxa estigui desocupada després d’un temps t d’haver acabat una trama és equivalent a calcular la probabilitat que 0 nodes hagin volgut accedir a la xarxa durant aquest temps. Aquesta probabilitat ens la dóna la distribució de Poisson per n = 0. Per tant,
�� � � ���� Finalment, anem a discutir si aproximar el nombre de nodes que volen accedir a la xarxa durant un temps t per una distribució de Poisson és correcte2. Aquesta aproximació es basa en dues suposicions de suposicions:
1. Podem dividir l’interval de temps t en K intervals més petits δ = t⁄K. 2. Durant el temps δ, com a molt un node vol accedir a la xarxa, amb probabilitat
α. En aquestes condicions, la probabilitat que k nodes vulguin accedir a la xarxa ve descrit per una distribució binomial
�� � ��
����� � �����
Quan fem el límit K →∞, mantenint kα = ctant = λt, recuperem la distribució de Poisson. D’aquí deduïm que
�� � � En el nostre cas, δ = 2μs de manera fixa. L’aproximació serà doncs bona si
1. t >> δ de tal manera que el quocient t⁄δ = K sigui prou gran per pensar que estem a prop del límit K →∞.
2. λ sigui prou petit perquè α sigui petit. En efecte si α és gran, difícilment podem pensar que només un node voldrà accedir a la xarxa durant l’interval δ i per tant l’aproximació serà falsa.

140
Després d’aquestes consideracions, ens podem preguntar si l’aproximació de Poisson és vàlida per calcular el nombre d’accessos durant la transmissió d’una trama. El cas límit és aquell en què envien la trama més curta, de 37 bits. La relació entre els paràmetres λ, t, K, i α és
�� � ������� � ��� ���
Així, la distribució Binomial associada, serà
�� � ���
����� � ������
mentre que l’aproximació per Poisson serà,
�� � ��
����� ������
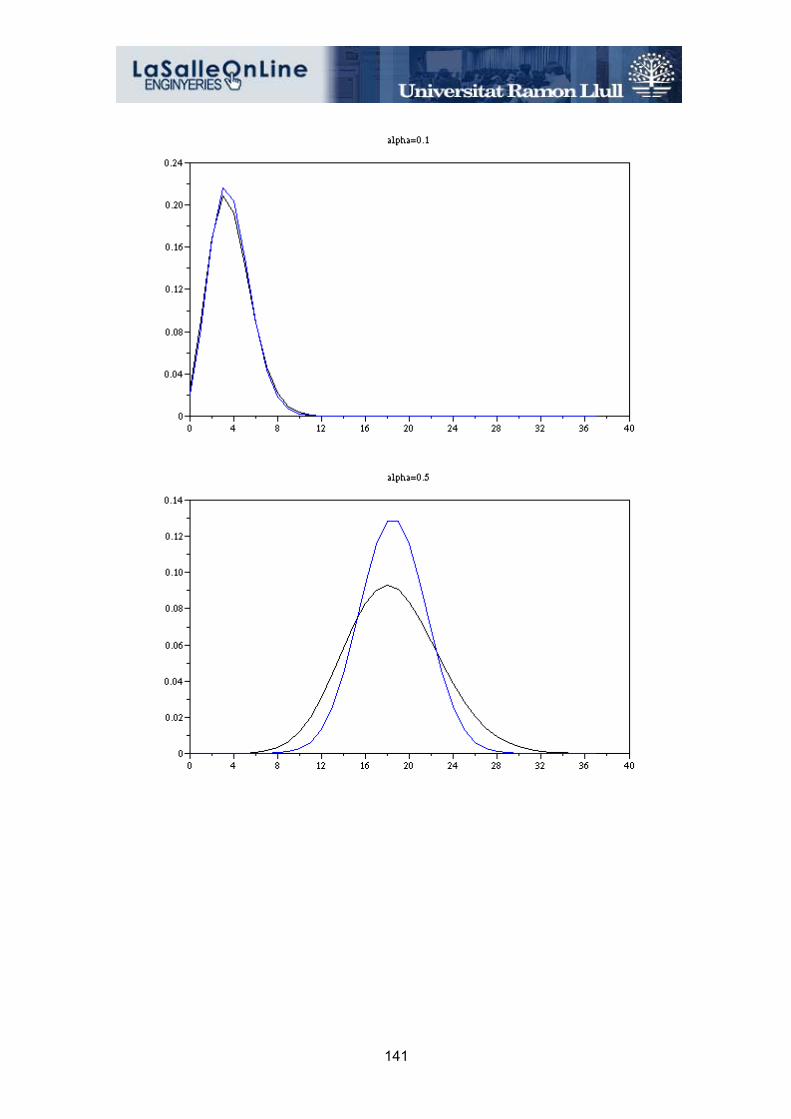
141
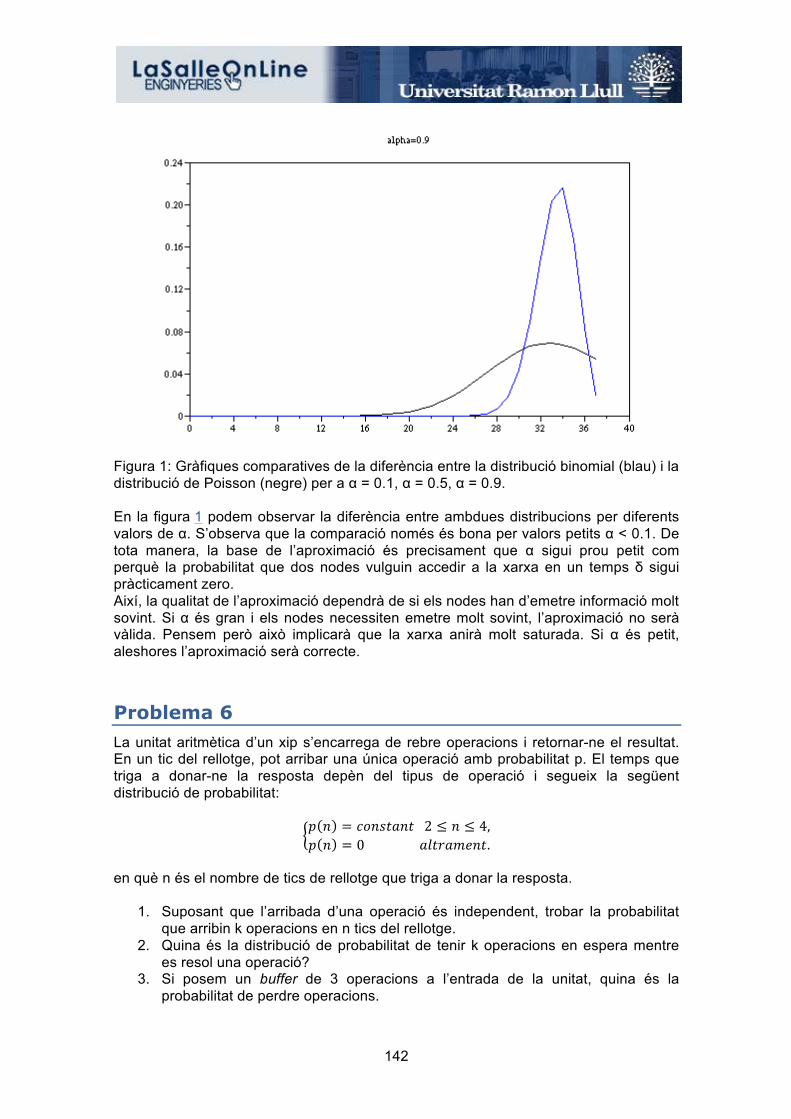
142
Figura 1: Gràfiques comparatives de la diferència entre la distribució binomial (blau) i la distribució de Poisson (negre) per a α = 0.1, α = 0.5, α = 0.9. En la figura 1 podem observar la diferència entre ambdues distribucions per diferents valors de α. S’observa que la comparació només és bona per valors petits α < 0.1. De tota manera, la base de l’aproximació és precisament que α sigui prou petit com perquè la probabilitat que dos nodes vulguin accedir a la xarxa en un temps δ sigui pràcticament zero. Així, la qualitat de l’aproximació dependrà de si els nodes han d’emetre informació molt sovint. Si α és gran i els nodes necessiten emetre molt sovint, l’aproximació no serà vàlida. Pensem però això implicarà que la xarxa anirà molt saturada. Si α és petit, aleshores l’aproximació serà correcte.
Problema 6 La unitat aritmètica d’un xip s’encarrega de rebre operacions i retornar-ne el resultat. En un tic del rellotge, pot arribar una única operació amb probabilitat p. El temps que triga a donar-ne la resposta depèn del tipus de operació i segueix la següent distribució de probabilitat:
� � � ������������ � � � ��
� � � ��������������������������
en què n és el nombre de tics de rellotge que triga a donar la resposta.
1. Suposant que l’arribada d’una operació és independent, trobar la probabilitat que arribin k operacions en n tics del rellotge.
2. Quina és la distribució de probabilitat de tenir k operacions en espera mentre es resol una operació?
3. Si posem un buffer de 3 operacions a l’entrada de la unitat, quina és la probabilitat de perdre operacions.

143
Solució Per respondre el primer apartat, només cal adonar-se que la solució correspon a una distribució binomial. En efecte, per tenir k operacions en n tics del rellotge, cal, primer, triar en quins dels n tics arriben les operacions: aquest comptatge ens el dóna el número combinatori. Després, per cada combinació, cal comptar la probabilitat de rebre k operacions, pk i n-k esperes (1 -p)n-k. Fixem-nos que estem fent servir que l’arribada de una operació és independent de l’arribada d’una altra. Tot junt, ens queda,
� �� � ��
����� � �����
Evidentment, cal que n ≤ k Un cop sabem p(n,k), podem respondre ara al segon apartat. Es tracta d’aplicar el teorema de la probabilitat total. En efecte, per tenir un nombre k d’operacions en espera, cal que s’estigui processant una operació. El temps de processament depèn del tipus d’operació. Per tant, per cada tipus d’operació cal comptar la probabilitat que durant aquell temps ens arribin les k operacions per la probabilitat que la durada sigui n. Caldrà després sumar per totes les durades. Així, de l’enunciat, deduïm la probabilitat de les diferents durades de les operacions:
� � � � � � � � ��
��
Per tant, la probabilitat de tenir k operacions en espera ens queda,
� � � � �� � � � �
�
���
D’aquesta fórmula podem deduir que com a molt podrem tenir 4 operacions en espera. Passem doncs a calcular les probabilitats per cada valor.
� � � � ��� � � ��
����
� � � � ��� � � � � ��� � � ��
���� � ��� �
� � � � ��� � � � � ��� � � � � ��� � � ��
����� � ���� � ��� �
� � � � ��� � � � � ��� � � � � ��� � � ��
��� � ���� � ���� � ��� �
� � � � ��� � � � � ��� � � � � ��� � � ��
�� � �� � ���� � ��� � �� �
Finalment, podem comprovar que
� � � � � � � � � � � � � � � ��
144
Pel que fa al darrer apartat, la resposta naïf fóra dir que perdrem dades sempre que ens arribin 4 operacions mentre que en realitzem una altra. Tindríem que = P[4]. Aquest resultat no és, però, correcte. En efecte, cal tenir en compte els casos d’operacions acumulades i de noves arribades mentre es processen aquestes operacions acumulades. Es proposa com a exercici, intentar descriure els diferents successos que conformen el fenomen.
Problema 7 Un tallafoc (firewall) està constituït per dos ordinadors idèntics. La probabilitat que un dels ordinadors sobrevisqui a l’atac dels pirates durant una durada t segueix una distribució exponencial de mitjana λ. Quan s’espatlla el primer ordinador, es desconnecta de la xarxa i es connecta el segon. Quina és la densitat de probabilitat que el sistema continuï funcionant després d’una durada T ? Quant en val la funció característica ?
Solució Aquest problema és un cas particular del problema 2. Aquí, la densitat de probabilitat que el primer sistema funcioni ve donada per la distribució exponencial
� � � ����� La densitat probabilitat que el sistema compost continuï funcionant al cap d’un temps t serà doncs la convolució de f amb ella mateixa:
�� � � ����� �� � � � �� � ������� ��
�
Per calcular la funció característica de fc, be fem la transformada de Fourier de l’expressió anterior, be, aprofitant que fc s’obté d’una convolució, fent el quadrat de la funció característica de la distribució exponencial,

145
� � ��
� � ���
En qualsevol cas, ens queda
�� � ���
� � �� ��
Problema 8 Un sensor s’activa amb probabilitat p, tot donant una tensió positiva distribuïda exponencialment amb constant V 0. Quan el sensor està inactiu, dóna una tensió nul�la.
1. Trobar la distribució de probabilitat acumulada de la tensió V que produeix el sensor.
2. Si posem dos sensors en sèrie, quina és la distribució de probabilitat de la tensió resultant ?
Solució Per un sensor, fixem-nos que tenim una variable aleatòria mixta. En efecte, la probabilitat que la tensió donada sigui negativa és 0. La probabilitat, en canvi, que V = 0 serà 1 - p, és a dir, la probabilitat que el sensor no s’activi. Quan V > 0, la densitat de probabilitat d’un valor correspondrà a p, la probabilitat que s’activi el sensor, per la densitat corresponent a la distribució exponencial. En resum, ens queda,
� � � ������������������������������������������������������� � ��
� � � � � ����������������������������������������������� � ��
� � � � � � � � � � ���
�� ������������ � ��
Representem aquesta funció a la figura 2 i observem la discontinuïtat a l’origen.
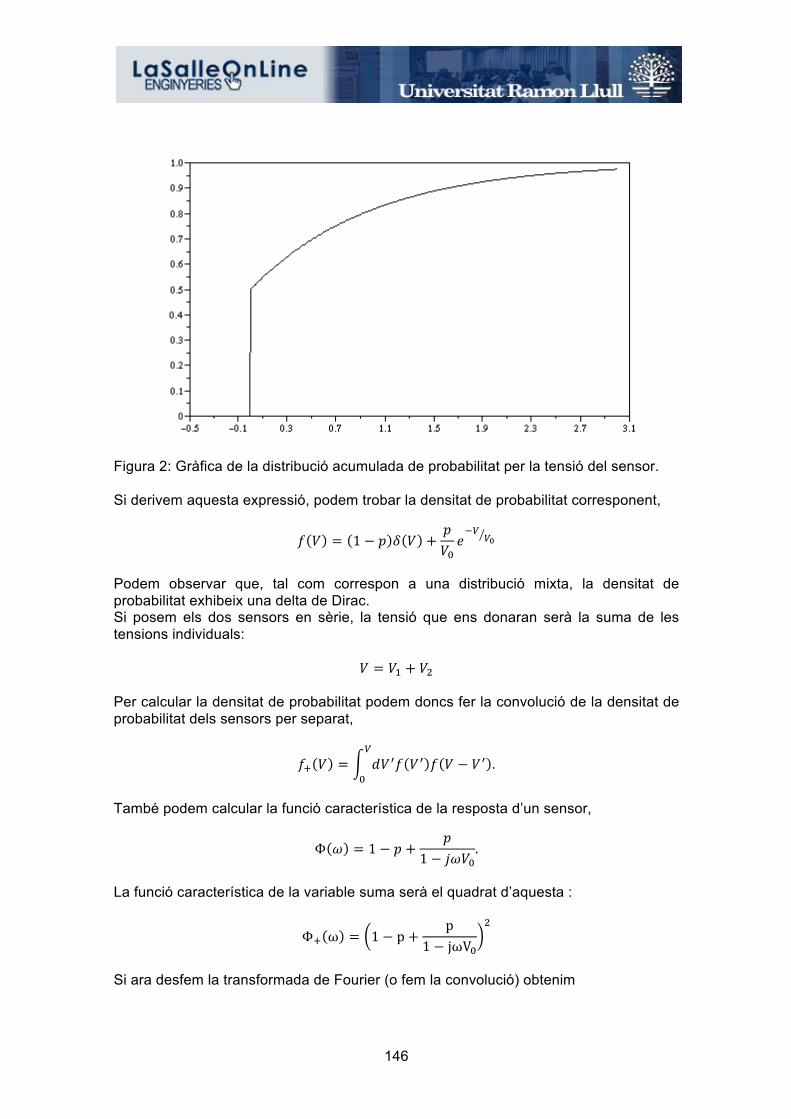
146
Figura 2: Gràfica de la distribució acumulada de probabilitat per la tensió del sensor. Si derivem aquesta expressió, podem trobar la densitat de probabilitat corresponent,
� � � � � � � � ��
�����
��
Podem observar que, tal com correspon a una distribució mixta, la densitat de probabilitat exhibeix una delta de Dirac. Si posem els dos sensors en sèrie, la tensió que ens donaran serà la suma de les tensions individuals:
� � �� � �� Per calcular la densitat de probabilitat podem doncs fer la convolució de la densitat de probabilitat dels sensors per separat,
�� � � ���� �� � � � �� �
�
�
També podem calcular la funció característica de la resposta d’un sensor,
� � � � � � ��
� � �����
La funció característica de la variable suma serà el quadrat d’aquesta :
�� � � � � � ��
� � ����
�
Si ara desfem la transformada de Fourier (o fem la convolució) obtenim

147
�� � � � � � �� � � ���� � ��
�����
�� ���
��� ��
���� �
Problema 9 Una xarxa informàtica disposa de n ordinadors. Cada ordinador te una probabilitat p d’estar engegat, independentment de l’estat dels altres ordinadors. Un ordinador engegat envia cada segon, un nombre de paquets N cap a l’exterior de la xarxa. La distribució de probabilitat de N segueix una distribució de Poisson de constant α.
1. Quina és la probabilitat de tenir k ordinadors engegats simultàniament? 2. Demostrar que la suma de dues variables aleatòries de Poisson independents
de coeficients α1 i α2 és una variable aleatòria de Poisson de coeficient α1 + α2. 3. Calcular la probabilitat que per la xarxa s’enviïn K paquets cap a l’exterior per
segon. 4. En un cas real, com es podrien avaluar els diferents paràmetres del problema?
Com es calcularia la probabilitat del punt anterior? 5. Es vol posar un tallafoc que controli les dades enviades pels ordinadors cap a
l’exterior. Quants paquets ha de ser capaç de tractar per segon per tal que assegurem que es tracten tots els paquets enviats amb probabilitat 0.999? Si el tallafoc es penja quan es supera el nombre de paquets que pot tractar, amb quina freqüència es penjarà?
Dedicat als esforçats encarregats del CSI.
Solució El nombre d’ordinadors engegats en un moment determinat ve donat per una distribució binomial. En efecte, si tenim un total de n ordinadors, la probabilitat de tenir-ne k engegats, mentre que la resta n-k romanen apagats és pk(1 -p)n-k. Cal afegir ara el factor que compta les diferents combinacions de k elements entre n. Ens queda
� � ��
����� � ����� �
Per una altra banda considerem les variables aleatòries amb distribució de Poisson de coeficients α1 i α2, independents. Les anomenarem n1 i n2 respectivament. La variable suma, n = n1 + n2 tindrà una funció de probabilitat
� � � � ��� � � �� � ���
�
����
en què p(n1,n2) és la funció de probabilitat conjunta de les variables n1 i n2. La fórmula (2) la podem interpretar de la manera següent: per tal que la variable suma prengui el valor n, cal considerar tots els esdeveniments per les variables n1 i n2 que sumin n. Com que cadascun d’aquests esdeveniments és disjunt (no pot donar-se alhora que un altre), la probabilitat que es produeixi qualsevol d’ells n’és la suma. Ara,

148
com que les variables n1 i n2 són independents, la funció de probabilitat conjunta ens queda,
� � � � ������� � �� � ���
�
����
essent p1 i p2 les funcions de probabilitat de n1i n2 respectivament. Si ho desenvolupem per les variables de Poisson,
� � ��
�����������
�
� � �� ����������� �
�
����
����������
��
��
��� �� � ����������
����
�
����
� ����������
����� � ���
�
(4)
Fixem-nos com, en la segona línea, hem factoritzat les exponencials i hem multiplicat i dividit l’expressió per n!. Això ha fet aparèixer el número combinatori
�
��
dins del sumatori, el que ens permet de reconèixer-hi el binomi de Newton. L’expressió final,
� � ��
���� � ��
���������� correspon a la funció de probabilitat d’una variable aleatòria de Poisson de coeficient α1 + α2 tal com volíem demostrar. Aquest resultat el podem estendre immediatament amb un raonament per inducció a la suma N de k variables de Poisson idèntiques i independents de coeficient α,
� ��� ��
���� ����� � �
Entenem aquesta quantitat com una probabilitat condicionada en el sentit següent: calculem quina és la probabilitat que la variable suma valgui N si estem sumant k variables. Volem calcular la probabilitat que la xarxa enviï K paquets per segon. Aquest succés el podem descompondre en funció del nombre d’ordinadors connectats, k. Aleshores, per enviar K paquets, podem enviar K amb 1 ordinador engegat o K paquets amb dos ordinadors engegats, etc. Tots aquests successos són disjunts

149
� � � � �������� � �������� � �������� � ��������
� �������� � �������� � � � �������� � ������������
� � ������� � �������� � � ������� � ���������
� � ������� � ��������� ��� � �������� � ������������ ��
en què Ntot és el número total de ordinadors. La probabilitat conjunta d’enviar K paquets amb n ordinadors engegats la podem recuperar a partir de la probabilitat tenir n ordinadors engegats p(n) i la probabilitat condicionada d’enviar K paquets si tenim n ordinadors engegats,p(K|n), que hem calculat anteriorment. Ens queda doncs,
� � � � � � � � � ���
����
���
Fixem-nos que hem recuperat exactament el teorema de la probabilitat total. Si substituïm les expressions corresponents, ens queda,
� � ������
�� � � � �������
���� ����� ���
����
���
���
Aquesta expressió no es pot simplificar. Si necessitem calcular algun valor concret per p(K), caldrà efectuar el sumatori a partir dels valors reals per Ntot i α. La distribució de probabilitat del nombre de paquets que la xarxa envia a l’exterior ens queda doncs descrita per tres paràmetres, Ntot, p i α. El primer, el nombre total d’ordinadors, és fàcil d’estimar, sempre que tinguem l’inventari al dia. Pel que fa a p, podem avaluar-lo a partir de grups petits d’ordinadors, comptant senzillament el nombre d’ordinadors engegats sobre el nombre total en un moment donat. Per conèixer α, necessitarem algun mitjà (software, hardware) per traçar el tràfic de la xarxa. El podem posar, per exemple sobre un petit grup de ordinadors, tot sabent quants en tenim engegats i aleshores, mirant el nombre de paquets que s’envien, ajustar el valor de α. Una segona alternativa fóra calcular alhora p i α: avaluem el tràfic total que surt cap a l’exterior i d’aquest resultat ajustem simultàniament els dos paràmetres, a partir de la fórmula ( 7). Si necessitem avaluar quants paquets cal poder tractar per segon si volem poder fer-ho per tots els paquets enviats amb probabilitat 0.999, cal abans que calculem la funció de distribució acumulada pel nombre de paquets enviats,
� �� � � � � �� � � � �
��
���
����
Evidentment la suma no la podem efectuar sense conèixer els valors de p i α, ja que no te una expressió algebraica tancada. Un cop tenim la funció de distribució acumulada, busquem el valor de K0 pel qual
� �� � ������ Aquest serà el valor que ens garantirà que podrem tractar tots els paquets enviat amb la probabilitat requerida.

150
Una fórmula alternativa seria emprar p(K) per avaluar el valor mitjà de K i la variància. Posteriorment, fem servir el teorema de Markov o el de Txebitxev per trobar el límit. En qualsevol cas, sabem que cada segon, tenim una probabilitat q = 0.001 de penjar el sistema. Suposem que el nombre de paquets enviats en un segon concret és independent del nombre de paquets enviats en un altre instant de temps. En aquestes circumstàncies, la probabilitat que el sistema es pengi al cap de t segons, és
� � � � � � ����� ��� això és: la probabilitat que no es pengi en els t- 1 segons anteriors i es pengi justament en el t. El temps mitjà que trigarà a penjar-se la xarxa és justament el valor mitjà de t,
� �� � � �� � �
�
���
� � � � �����
�
���
�����
Si calculem aquestes suma, obtenim,
� ��
�� ����
tal com intuïtivament podríem suposar: si el sistema es penja 1 cop cada 1000 segons, trigarà 1000 segons a penjar-se en mitjana. Això ens fa un cop cada 17 minuts més o menys. Per penjar-se un cop al dia, caldria deixar passar tots els paquets amb probabilitat 10-5.
Problema 10 Un sensor dóna una tensió V i segons una distribució exponencial de mitjana v a la qual s’afegeix un soroll ν amb distribució també exponencial de mitjana ε. Mesurem la tensió V o = V i + ν.
1. Calcular la densitat de probabilitat conjunta f(V i,V o). 2. Fer la regressió lineal de V o respecte de V i. 3. Calcular la corba de regressió de V o respecte de V i. Comentar-ne els
resultats.
Solució Per calcular la densitat de probabilitat conjunta f(V i,V o) tenim dues opcions. La primera és observar que, com V i i ν són independents, tenim,
� �� � � � �� �� �� � � ����

151
Com que les dues variables segueixen distribucions exponencials, tenim,
�� �� ��
�����
���������������� � ��
����
� � quan les respectives variables són positives i zero altrament. Per això, la densitat de probabilitat conjunta ens queda,
� �� � � ��
������
���� � ����
quan les dues variables són positives alhora i zero altrament. Sobre aquesta densitat de probabilitat conjunta, hi podem fer el canvi de variable
�� � �������������� � �� � �
Observem com el determinant jacobià d’aquest canvi és 1. Així, la densitat de probabilitat de les noves variables serà
� �� ��� ��
������
��������
�� � ����
en el domini V i ≥ 0 i V o ≥ V i, i zero altrament. Fixem-nos que el domini de les variables en què la densitat de probabilitat conjunta és diferent de zero, no és el primer quadrant com per les variables V i i ν, sinó l’àrea ombrejada de la figura 3. Això ve del fet que V 0 és la suma de dues variables positives i per tant, serà sempre més gran que qualsevol de les dues.

152
Figura 3: La regió ombrejada mostra el domini en què la densitat de probabilitat conjunta de V i i V o és no nul�la. Una segona manera de trobar la densitat de probabilitat conjunta és a partir de l’expressió que relaciona V o amb V i i ν,
�� � �� � �� Aïllant ν, ens queda
� � �� � �� ����������� Si fixem el valor de V i, aquesta equació la podem interpretar com un canvi de variable entre ν i V o. Fixar el valor de V i cal interpretar-ho com una probabilitat condicionada. Per tant,
� ����� � �� �� � �� ��
���
������ � ����
quan V o -V i ≥ 0 i zero altrament. Per obtenir la densitat de probabilitat conjunta, ara només ens cal multiplicar per fi(V i),
� �� ��� � �� �� � ����� ��
�����
��
��� �����
� � ���� quan V o -V i ≥ 0 i V i és positiu i zero altrament. Recuperem evidentment el mateix resultat que pel mètode anterior. Això ens permet donar una millor interpretació a la densitat de probabilitat condicionada. Si ara volem trobar la regressió lineal entre V i i V o, ens cal aplicar la fórmula,
�
���� � �� �
���
���� � �� � ����
en què, seguint la nomenclatura habitual, tenim que �� �� �� �� �� �� �� �� ��
� �� �� � ��� �� ��
� �� �� � ��� ��
��� �� ���� � �����
����������������������������������������������������������������������������������������������
La manera més eficient de calcular aquests valors esperats és tot recordant que V i i ν són variables exponencials i independents. Per això, tindrem,
�� � �� �� � �� ��� � ��� ��
� � ��� � ��� �� ������� �� Fixem-nos que la darrera de les equacions és equivalent a dir que la correlació entre les dues variables és nul�la, ja que són independents,
��� �� �� � �� � � �� ��� ��� � ����� � ��

153
Si ara recordem també que V o = V i + ν, tenim, �� �� �� ��� �� � � ��� �� � �� � �� � � ������������������������������������������������������������������������� ��� �� �� � ��
� ��� �� � �� � � � ����� ��
� � ��� � �� � ��������������������������������
��� �� �� � �� �� � �� ��� ���� � ����� �� �� � �� �� � �� � � � �� �
� ����������������������������������������������������������������������������������������������������������������������������������� Amb això, recopilem els paràmetres per fer la regressió lineal:
�� � �� �� � � � �� ��� � ��� ��
� � �� � ��� ��� ��
�� � ���������
Fixem-nos que hem calculat tots els valors esperats sense haver d’efectuar ni una sola integral. Si ara substituïm aquestes dades a l’equació (18), obtenim el resultat
�� � �� � �������� Aquest resultat era el que podíem esperar a priori. En efecte, si mirem la relació que defineix V o, que és lineal, observem que la regressió ens dóna exactament la mateixa relació en què hem substituït ν pel seu valor esperat: d’alguna manera, hem reproduït la relació mitjana entre ambdues variables. El càlcul dels valors esperats el podríem haver fet també tot calculant les integrals. Per una funció genèrica, g(V i,V o), tindríem,
� � �� ��� �� ��� ���� �� ����
������
����� ���
��
�
��
�
�
��� ��
Fixem-nos com apareix el domini de la figura 3 en la integral. Per tal d’il·lustrar com dur a terme aquest càlcul, mostrarem els passos necessaris per calcular el valor esperat més complex, < V iV o >,
� ���� �� ��� ����������
������
����� ���
��
�
��
�
�
��
����� ����
��� ���
�� �����������
�
�
��
�
�
��
���� ����
��� ���
�� �� � �
�
�
����
� �
��
���� � ��
� � ���
�
�
����
�
�� ��� � �� � �� ��
� ��� � ��
� � ��� � � � � �� ��
(27)
Evidentment, si calculem els valors esperats efectuant les integrals, obtindrem els mateixos resultats. Finalment, per obtenir la corba de regressió,

154
�� � � �� � farem servir la definició a partir de la densitat de probabilitat condicionada,
� �� �� ����� �� ������� ����� ����������
��
La densitat de probabilitat condicionada, la tenim del primer punt, bé perquè l’hem feta servir per obtenir la densitat de probabilitat conjunta, bé perquè emprem la definició,
� ����� �� �� ���
�� ���
En qualsevol cas, això ens porta a calcular la integral,
� �� � ������
��� �����
� ��������
��
El domini d’integració, ve donat, naturalment, pel conjunt de valors pels quals la densitat de probabilitat condicionada no s’anul�la, és a dir, ν = V o -V i ≥ 0. Aquesta integral és molt senzilla de calcular:
� �� � ������
��� �����
�
�
��
�
��
����
� ������� ��
� ��
�
��
�
��
����
� �� � � �� ��
�
(30)
Simplificant, arribem al resultat final,
�� � � �� � �� � �
(31)
Obtenim el mateixa recta de regressió. Aquest resultat no ens ha de sorprendre. En efecte, la corba de regressió dóna la representació òptima de la variable V o en termes de V i en el sentit dels mínims quadrats; és una representació no paramètrica. La recta de regressió també és òptima en el sentit dels mínims quadrats, però fent una representació paramètrica: fixa els valors de la recta que millor ajusta les dues variables. Ara be, la relació que tenim entre V o i V i és lineal, ja que la tensió que mesurem serà la tensió del sensor més el soroll. De fet, hem construït les densitats de probabilitat de V o purament a partir d’aquesta relació. Per força doncs, la millor representació de V o en termes de V i serà una recta. Per tant, és normal que els dos estimadors ens donin el mateix resultat ja que ambdós optimitzen el mateix criteri sobre la mateixa forma de funció.

155
Problema 11 Per un canal binari simètric i sense memòria amb Bit Error Rate p, enviem els bits segons la trama següent: per cada tres bits de dades enviem la paritat, repetim la operació per tres bits mes dues vegades. La quarta enviem la paritat de la columna, tal com es veu en la figura 4. La relació entre les dades i els bits de paritat la trobem a la taula 1. Amb aquest mètode, si la comprovació de paritat falla, es pot corregir un bit de dades buscant quina fila i quina columna han fallat. Calcular la probabilitat que totes les comprovacions de paritat siguin correctes i les dades errònies.
Figura 4: Patró de dades i paritats segons s’envia pel canal.
p1 correspon a la paritat dels bits d1 d2 d3 p2 correspon a la paritat dels bits d4 d5 d6 p3 correspon a la paritat dels bits d7 d8 d9 p4 correspon a la paritat dels bits d1 d4 d7 p5 correspon a la paritat dels bits d2 d5 d8 p6 correspon a la paritat dels bits d3 d6 d9 p7 correspon a la paritat dels bits p4 p5 p6
Taula 1: Relació de dades i paritats dels diferents bits de la trama.
Solució D’entrada, fixem-nos que només volem calcular la probabilitat que les dades siguin incorrectes quan totes les comprovacions de paritat són correctes. Ens limitarem a estudiar aquest cas.
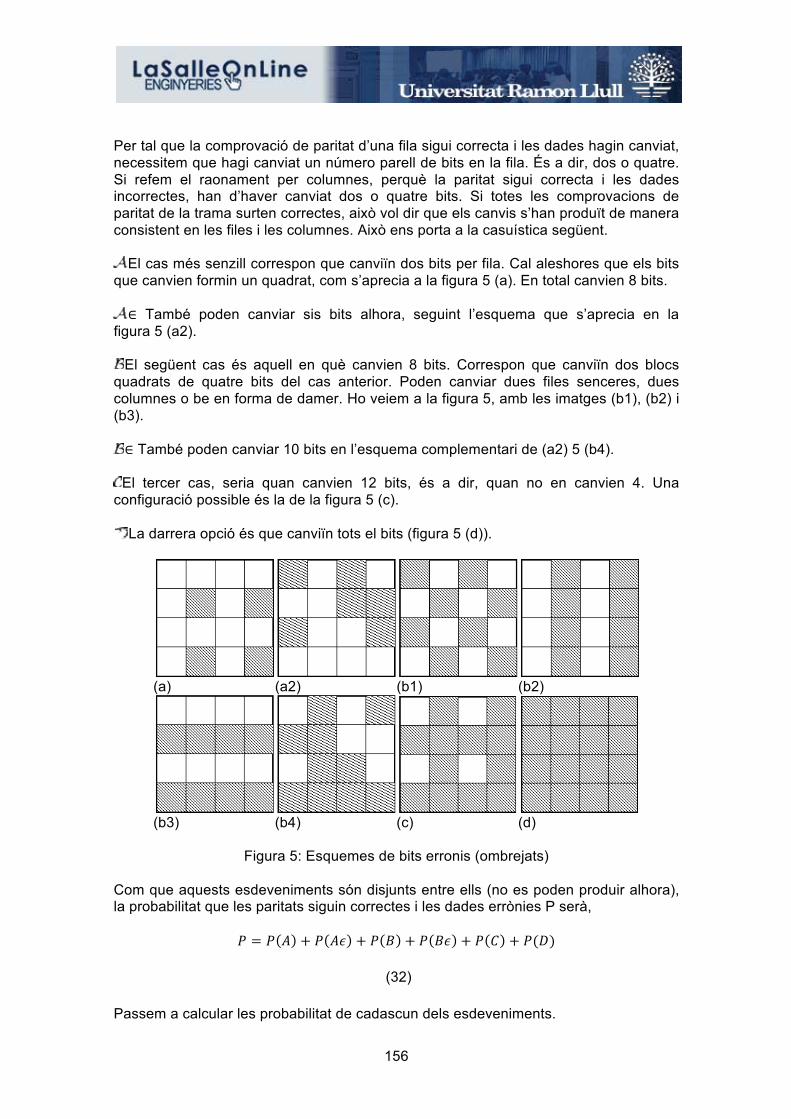
156
Per tal que la comprovació de paritat d’una fila sigui correcta i les dades hagin canviat, necessitem que hagi canviat un número parell de bits en la fila. És a dir, dos o quatre. Si refem el raonament per columnes, perquè la paritat sigui correcta i les dades incorrectes, han d’haver canviat dos o quatre bits. Si totes les comprovacions de paritat de la trama surten correctes, això vol dir que els canvis s’han produït de manera consistent en les files i les columnes. Això ens porta a la casuística següent.
El cas més senzill correspon que canviïn dos bits per fila. Cal aleshores que els bits que canvien formin un quadrat, com s’aprecia a la figura 5 (a). En total canvien 8 bits. � També poden canviar sis bits alhora, seguint l’esquema que s’aprecia en la
figura 5 (a2).
El següent cas és aquell en què canvien 8 bits. Correspon que canviïn dos blocs quadrats de quatre bits del cas anterior. Poden canviar dues files senceres, dues columnes o be en forma de damer. Ho veiem a la figura 5, amb les imatges (b1), (b2) i (b3). � També poden canviar 10 bits en l’esquema complementari de (a2) 5 (b4).
El tercer cas, seria quan canvien 12 bits, és a dir, quan no en canvien 4. Una
configuració possible és la de la figura 5 (c).
La darrera opció és que canviïn tots el bits (figura 5 (d)).
(a) (a2) (b1) (b2)
(b3) (b4) (c) (d)
Figura 5: Esquemes de bits erronis (ombrejats) Com que aquests esdeveniments són disjunts entre ells (no es poden produir alhora), la probabilitat que les paritats siguin correctes i les dades errònies P serà,
� � � � � � �� � � � � � �� � � � � ����
(32) Passem a calcular les probabilitat de cadascun dels esdeveniments.
157
Pel primer , comptem que quatre bits canvien i 12 no ho fan. A banda, hem d’avaluar quantes combinacions diferents d’esdeveniments d’aquest tipus podem generar. En una fila tenim
�
�� �
maneres diferents de triar els 2 bits que canvien (triem 2 entre quatre). Cal ara que triem les dues files que canviaran. De nou, el nombre és
�
�� �
Sabent les files en què canvien bits i els bits que canvien en una d’elles, els altres dos queden fixats per formar el quadrat. En total, això ens dóna
����� � �� combinacions. Una manera alternativa de trobar aquest resultat es fixar els dos bits de la diagonal del quadre. Pel primer tenim 16 possibilitats. Pel segon 9. Després, dividim per quatre per eliminar els comptatges dobles. Obtenim de nou 36. Així, ens queda,
� � � ���� � � � ��
(33)
En el cas que canviïn de cop sis bits, per la forma del dibuix fixem-nos que queda una fila i una columna sense errors. Triar la fila i la columna sense errors ens dóna 4 possibilitats per cadascuna. A partir d’aquí, el patró conté dues parelles de bits enganxades i dues de separades. Triem la parella separada (3 possibilitats) i després encara ens queden dues maneres de col�locar les dues parelles enganxades. En total,
������������� � �� Per tant,
� �� � ���� � � � ��
(34)
Per, P(B), el comptatge és més delicat. Canviaran 8 bits i els altres 8 romandran intactes. Pels comptatges, comencem fixant un quadrat (4 bits) com en el cas anterior. Això ens dóna 36 possibilitats: hem triat dues files, i en les files 2 parelles de bits que canvien. En les altres dues files, cal que triem les altres dues parelles de bits que canvien: 6 possibilitats més. En total,
�����
�� ���

158
Hem dividit per dos per eliminar els dobles comptatges corresponents a tries equivalents de files. Finalment, ens falta per comptabilitzar el cas en què canvien els quatre bits de dues files (figura 5 (b3)). En aquest cas, nomes ens cal triar les dues files que canviaran: 6 possibilitats. En total
��� � � � ��� possibilitats. La probabilitat serà doncs,
� � � ����� � � � �
(35)
Si ens canvien 10 bits, P(B�), com que la figura és la complementària del cas en què en canvien 6, el comptatge serà el mateix i tindrem,
� � � � ���� � � � �
(36)
Pel cas ( ), ens canviaran 12 bits i 4 quedaran iguals. El comptatge dels casos possibles és el mateix que per l’esdeveniment , només que ara triem els quatre bits que no canvien. Per això,
� � � ����� � � � �
(37)
El darrer cas, ( ), és el més senzill de tots: canvien tots els bits i només hi ha una possible combinació. Ens queda,
� � � ��� (38)
Tot junt, la probabilitat final és
� � ���� � � � �� � ���� � � � �� � ����� � � � � �������������������������������������������������
� ����� � � � � � ����� � � � � � ���
(39)
Fixem-nos que el terme dominant en aquesta equació és d’ordre p4, sense tenir en compte possibles mecanismes de correcció. Si ho comparem amb un codi de Hamming(7,4), la probabilitat que totes les comprovacions de paritat siguin correctes i les dades errònies és p3, veiem que hem guanyat una potència més en p, tot i tenir una relació entre bits enviats i bits de dades semblant. Per poder fer una comparativa més exhaustiva, caldria, a més estudiar els mecanismes de correcció d’error.
159
Problema 12 Per un canal binari simètric i sense memòria amb Bit Error Rate3 (BER) p enviem paraules de 2 bits amb un bit de paritat. Si la paritat rebuda és incorrecte, enviem un bit per un canal de retorn (també amb BER p) i es torna a enviar la paraula. Trobar la funció de probabilitat d’haver de reenviar la paraula n cops.
Solució Per reenviar la paraula n cops, cal que
• haguem rebut n - 1 vegades consecutives el bit indicant que la paritat es incorrecte
• i, finalment, haguem rebut el bit indicant que la paritat és correcte. Com que el canal no té memòria, cada tramesa és independent de les altres. Per això, podem escriure la probabilitat p(n) d’haver d’enviar n vegades la paraula com
� � � � ���� �� � ��� ��������������������
(40)
Ens cal doncs calcular les probabilitats de rebre el bit de Paritat OK i de Paritat NOK. Comencem pel primer. Per rebre el bit de Paritat OK, cal,
• bé haver enviat el bit Paritat OK i que aquest no hagi canviat en el canal de retorn,
• be haver enviat el bit de Paritat NOK i que aquest hagi canviat. Si s’ha enviat el bit de paritat correcte, es que la comprovació de paritat ha estat correcte i per tant, en la paraula enviada
• no ha canviat cap bit, • han canviat dos bits.
Per tant, ens queda
� ���������������������������������������� � � � � � � � � � ��� � � �
(41)
Per altra banda, si s’ha enviat el bit Paritat NOK, la comprovació de paritat no ha resultat correcta i per tant, en la paraula enviada
• ha canviat un bit, • han canviat tots tres bits.
Per tant, ens queda
160
� ��������������������������������������� � � �� � ��� � ���� �
(42)
Així, ens queda � ���������������� � � � � � � � � � ��� � � � � � �� � � � � � ��
(43)
Operant, obtenim,
� ���������������� � �� � �� � ���� � ���� � ���
(44)
Es ara el torn de la probabilitat de rebre el bit de Paritat NOK. En aquest cas, cal,
• bé haver enviat el bit Paritat OK i que aquest hagi canviat en el canal de retorn, • be haver enviat el bit de Paritat NOK i que aquest no hagi canviat.
Si s’ha enviat el bit de paritat correcte, es que la comprovació de paritat ha estat correcta i per tant, en la paraula enviada
• no ha canviat cap bit, • han canviat dos bits.
Per tant, ens queda
� ������������������������������������� � � � � � � � ��� � � �
(45) Per altra banda, si s’ha enviat el bit Paritat NOK, la comprovació de paritat no ha resultat correcta i per tant, en la paraula enviada
• ha canviat un bit, • han canviat tots tres bits.
Per tant, ens queda
� ������������������������������������������ � � �� � � � � � �� (46)
Així, ens queda
� ������������������ � � � � � � � ����� � �� � � � � �� � � � � � �� (47)
Operant, obtenim,

161
� ������������������ � �� � ���� � ���� � ���
(48)
Fixem-nos com les probabilitat de rebre Paritat OK i Paritat NOK sumen 1. En efecte, un succés és el complementari de l’altre: la Paritat, o la rebem OK, o la rebem NOK, i no la podem rebre de les dues maneres alhora. Ara ja podem escriure el resultat final,
� � � �� � ���� � ���� � ��� ��� � � �� � ���� � ���� � ���
(49)
Problema 13 Un servidor de correu electrònic, escaneja tots els missatges a la recerca de virus. Un missatge qualsevol te una probabilitat p d’estar infectat. El temps t que triga a analitzar un missatge segueix una distribució exponencial de constant λ a partir de un temps mínim. Si el missatge no te virus, el temps mínim és t0 mentre que si en te, és t1 (t1 > t0).
1. Trobar la densitat de probabilitat del temps t que es triga a processar un missatge.
2. Si el nombre de missatges n que arriben al servidor durant un temps t segueix una distribució de Poisson de constant αt, quina és la probabilitat que s’acumulin k missatges mentre el servidor n’escaneja un.
Solució Comencem per entendre les densitats de probabilitat del temps que triga el sistema a analitzar un missatge. Si el missatge no té virus, es triga un temps mínim t0 a partir del qual se segueix una distribució exponencial. Així, la densitat de probabilitat serà,
�� � �������������������������������������� � ���
���� ���� ������������������� � ���
(50)
Idènticament, pel cas amb virus, tenim,
�� � �������������������������������������� � ���
���� ���� ������������������� � ���
(51)

162
Podem comprovar com ambdues densitats de probabilitat estan correctament normalitzades. Amb això, ja podem calcular la funció de distribució acumulada F(t). Si t < t0, no hem tingut temps d’analitzar cap missatge i per tant, F(t) = 0. Si t0 ≤ t < t1, només podrem analitzar missatges sense virus. Per tant, F(t) serà la probabilitat que el missatge no tingui virus per la probabilitat que triguem menys de t a analitzar-lo,
� � � � � � ��
�
��
�� � � � � � � � ��� ����
Finalment, si t1 ≤ t, el missatge pot tenir virus o no tenir-ne. Per tant, F(t) serà la probabilitat que el missatge no tingui virus per la probabilitat que triguem menys de t a analitzar-lo més la probabilitat que sí que tingui virus i l’analitzem en menys de t,
� � � � � � ��
�
��
�� � � � ��
�
��
�� � � � � � � � ��� ���� � � � � ��� ����
Resumint-ho tot en una fórmula, ens queda,
� � �
����������������������������������������������������������������������������������� � ��
� � � � � ��� ���� ��������������������������������� � � � ��
� � � � � ��� ���� � � � � ��� ���� ������ � �
(52)
Podem observar com F(t) és contínua i per tant, la variable aleatòria és contínua. Derivant, obtindrem la densitat de probabilitat,
� � �
����������������������������������������������������������������������������������� � ��
� � � ���� ���� ��������������������������������������� � � � ��
� � � ���� ���� � � ���� ���� ����������������� � �
(53)
Si el nombre de missatges que arriben en una durada t al servidor segueix una distribució de Poisson de constant αt, això representa la probabilitat condicionada de rebre k missatges en la durada t,
� � � ��
�����������
Per saber el nombre de missatges que s’acumularan mentre se n’està analitzant un altre, aplicarem el teorema de la probabilitat total:
� � � ��� � � �����
��
(54)

163
Si ara substituïm per les expressions corresponents, tindrem,
� � � ��
�
��
�
���� ����� � � � ���� ���� � ��
�
��
�
���� ���������� ����
(55)
Per obtenir la fórmula final, ens caldrà efectuar les integrals. Per fer-ho necessitem recordar que
�� ����� � �����
�� �� �
��
��
�
���
����
����
resultat que s’obté de integrar per parts repetidament. Si operem amb cura i paciència, finalment arribem a
� � � � � � �����������
�� � � ��
�
��
�����
� � � ���
�
���
� ������������
�� � � ��
�
��
�����
� � � ���
�
���
Problema 14 Les dades codificades en un senyal
� � � � � ��� ����� � � � amb una ona portadora de freqüència fc es poden representar mitjançant un nombre complex,
� � � � � ��� � Quan aquesta ona es propaga en un medi que varia aleatòriament, es produeix el fenomen del fàding. El senyal rebut el podem representar aleshores com
� � � �� ���� �� � � � � � ��� �� � � � �� �
�
��
en què la funció complexa β(t,τ) representa la resposta del medi. Per medis de variació lenta, β es pot aproximar per una constant complexa. Si la part real i la part imaginària

164
són variables aleatòries independents que segueixen una distribució Gauss de mitjana zero i variància σ2 es diu que el fàding és de tipus Rayleigh mentre que si segueixen una distribució Gauss de mitjana μ i variància σ2 es diu que el fàding és de tipus Rice.
1. Quina és la distribució de probabilitat que segueix el mòdul de β per un fàding de tipus Rayleigh ?
2. Quina és la distribució de probabilitat que segueix el mòdul de β per un fàding de tipus Rice ?
Solució Com que podem considerar que la part real de β, que anomenarem x, i la part imaginària, que anomenarem y, són dues variables independents, podem construir molt fàcilment la seva distribució conjunta,
� �� � � �� � �� � Volem calcular la distribució de probabilitat del mòdul de β, que anomenarem ρ. En termes de x i y,
� � �� � ��
Així, la funció de distribució acumulada de ρ, la podem obtenir tot integrant la densitat de probabilitat conjunta, ja que correspon a la probabilitat que x i y estiguin en l’interior del disc de radi ρ tal com s’indica en la figura 6.
(56)

165
Figura 6: Regió de (x,y) que correspon a la probabilitat que el mòdul de β sigui més petit que ρ.
�� � � ��������
� �� �
(57)
La integral la podrem realitzar fàcilment tot fent un canvi a coordenades polars. Per un fàding de tipus Rayleigh, tindrem que
�� � ��
�������
���
�� � ��
�������
���
Així,
�� � � ��������
�
�����������
���
(58)
Realitzant el canvi a polars,
�� � � ����� ��
��
�
�
���������
����
�
(59)
Les dues integrals es poden efectuar immediatament tot obtenint,
�� � � � � ����
���
(60)
Derivant, ens queda la densitat de probabilitat corresponent al fàding de tipus Rayleigh,
�� � ��
������
���
(61)

166
Si el fàding és de tipus Rice,
�� � ��
����� ��� �
��� ������ � ��
����� ��� �
���
i la integral,
�� � � ���������
�
������� ��� �� ��� ���
���
� ���������
�
������ ������������ ���
���
(62)
Si ara fem el canvi a polars, la integral ens queda un pèl més complexa,
�� � � ����� ��
��
�
�
����
�
�
�� ������������ ��������� ���
(63)
Per tal d’obtenir la densitat de probabilitat derivem directament l’expressió anterior,
�� � � ��
��
�
�
������ ���������� ��������� ���
(64)
Fixem-nos que ens queda la integral respecte de l’angle polar,
�����
���
�
����
��
�
����
�����������
Es pot demostrar que aquesta integral és equivalent a la funció de Bessel, I0,
�� � ��
����
��
�
������
Finalment, ens queda que per al fàding de tipus Rice, tenim la densitat de probabilitat,

167
�� � ��
����
���
����������
���
(65)
Problema 15 Un aparell de mesura que no rep senyal, dóna un valor aleatori x0 anomenat pedestal, de mitjana μ0 i variància σ0
2. Efectuem la mesura d’una quantitat, que representem per la variable aleatòria y. La lectura de l’aparell és x1, una variable aleatòria de mitjana μ1 i variància σ1
2. Suposarem que l’efecte del pedestal sobre la mesura és additiu, i per tant,
�� � � � �� Suposarem també que les variables x0 i x1 segueixen una distribució gaussiana.
1. Demostreu que y segueix una distribució gaussiana. 2. Són independents x0 i x1 ? 3. Suposem que x0 i y són independents. Trobar la densitat de probabilitat de y. 4. Trobar la regressió lineal entre x1 i y. 5. En una mesura, trobem que σ0 = σ1. Què se’n pot deduir ? 6. Trobar la densitat de probabilitat de y en aquest cas.
Solució Volem demostrar que y segueix una distribució gaussiana. El que sabem es que x0 i x1 són gaussianes, i per tant, llur distribució conjunta serà la distribució conjunta de dues v.a. gaussianes:
� ��� �� ��
������ � � �����
��
� ������
�
��� �����
����������
����� ����� ��
��� �����
�
en què ρ01 és la correlació entre x0 i x1. Si ara efectuem el canvi de variable
� � �� � ���� � ��
que podem comprovar que el determinant Jacobià igual a 1, obtenim la densitat de probabilitat en termes de les noves variables,
� �� �� ��
������ � � �����
��
� ������
�
��� �����
����������
����� ������� ��
��� �������
�

168
Si desenvolupem les expressions dins l’exponencial, arribem a � �� ��
��
������ � � �����
��
� ������
�
�����
�������
��
��� �����
����������
��
��� ����� ������� �
�
��� �������
�
Aquesta es la forma que te la distribució conjunta de dues variables aleatòries gaussianes. Com que sabem que x1 és gaussiana, en concloem que y ho ha de ser també. Per tal d’obtenir la distribució de probabilitat de y, podríem calcular la distribució marginal corresponent de la distribució conjunta anterior. De tota manera, sabent que y és gaussiana, només ens cal conèixer la mitjana μy i la variància σy
2 per escriure la densitat de probabilitat. De la relació
�� � � � ��
en deduïm immediatament que
�� � �� � ��
i per tant,
�� � �� � ��
Per les variàncies, per altra banda, també sabem que
��� � ��
� � ��� � ����
�
en què σy0
(2) és la covariància de y i x0. Si a més suposem que x0 i y són independents, tindrem que σy0
(2) = 0, i, immediatament,
��� � ��
� � ���
Amb aquestes dues dades, ja podem escriure la densitat de probabilitat de y, que serà,
�� � ��
�� ��� � ��
��
��
� ������
� ��������

169
Ara toca calcular els coeficients de la regressió lineal entre y i x1. Aquesta relació ens serà molt útil per trobar el valor de la variable a partir de la mesura directe. La fórmula de la regressió lineal és
� � ��� � � en què
� � �����
�������
���
� � �� � ���
L’únic element que ens queda per calcular és σy1
(2).
������ � � �� �� � �� ���� � � �� � � �� � �� � �� ��� ��
� � ������ ��
�
� ��� � ��
�� ja que estem suposant que y i x0 són independents. Si ara substituïm, ens queda,
� ���� � ��
�
��� �� � �� � �� � ��
��� � ��
�
���
Reagrupant, finalment, obtindrem,
� � � ����
��� �� �
���
��� �� � ��
El coeficient de correlació serà
��� �����
����� � �
���
���
Així, perquè el coeficient de correlació sigui proper a 1, cal que la σ0 << σ1, és a dir, quan la variància del pedestal és molt més petita que la variància de la mesura. Durant una mesura, trobem que σ1 = σ0. Recuperem l’expressió per la variància de y,
��� � ��
� � ��� � ����
� En aquestes circumstàncies, veiem que
��� � �����
� Si y i x0 fossin independents, això significaria que la variable aleatòria y hauria de tenir variància zero. Això és inconsistent amb la definició de variable aleatòria (només podria prendre un valor possible, μy) i sembla poc realista com a resultat d’un procés de mesura. Per això cal concloure, en aquest cas, que y i x0 no són independents.

170
Tal com hem demostrat en el primer apartat, y seguirà igualment una distribució gaussiana i per tant, només ens cal saber la mitjana i la variància per determinar la densitat de probabilitat. La mitjana continua sent la mateixa,
�� � �� � �� Per calcular la variància, ara, necessitarem també conèixer σ01
(2),
������ �� � �� �� � �� ���� �� � �� �� � �� � � � �� ��� ��
� � ����
Amb això, obtenim un sistema de dues equacions amb dues incògnites, σy
2 i σy0(2),
��� � ��
� � ��� � ����
��
����� ��
� � ���������������������
que resolent obtenim,
��� � ��
� � ��� � ����
��
����� ���
�� ��
�����������������
Pel cas en què σ1 = σ0 = σ, el sistema ens queda,
��� � � �� � ���
��
����� ���
�� ������������������
i la densitat de probabilitat ens quedarà
�� � ��
�� �� � ����
�
��
� �������
��������
Problema 16 Per un bus d’instrumentació s’envien paquets de 8 bits. El nombre de paquets de cada transmissió segueix una distribució de Poisson de constant λ. Per tal d’accelerar-ne la transmissió, multiplexem l’enviament a través de dos canals: els paquets senars van pel canal 1 i els parells pel canal 2. Suposarem que els canals 1 i 2 són simètrics i sense memòria. La probabilitat que un bit canviï (BER) en el primer canal és p1 i la del segon és p2.
1. Quina és la probabilitat que un paquet vagi pel canal 1? I pel canal 2?
171
2. Quina és la probabilitat que un paquet arribi amb 3 errors exactament, si passa pel canal 1? I pel canal 2?
3. Es rep un paquet sense errors. Quina és la probabilitat que hagi passat pel canal 1?
4. Per tal d’obtenir un menor nombre d’errors, quin canal cal triar com a 1?
Solució La probabilitat que un paquet te nombre n és
� � ��
�������
Quan el bus transmet els paquets, el primer, tercer, cinquè, etc. van pel canal 1, mentre que el segon, el quart, el sisè, etc. van per canal 2. Així, la probabilitat P1 que un paquet vagi pel canal 1, correspon a la probabilitat que el nombre del paquet sigui parell,
�� � � �� ��
���������
�
���
�
���
Operant, obtenim,
�� � ����
������
�
���
� ��� ���� � ��
�� � ����
De manera semblant, la probabilitat P2 que un paquet vagi pel canal 2, correspon a la probabilitat que el nombre del paquet sigui senar,
�� � � �� � �
�
���
��
�� � � �
�
���
��������
i, idènticament,
�� � ����
�� � � ������ � ��� ���� � �
�
�� � ����
�
���
Cada paquet conté vuit bits. Així, per un paquet que passa pel canal 1, la probabilitat que tingui 3 bits canviats ve donada per la distribució binomial,

172
� �������� ��
���� � � ��
� Pel canal 2,
� �������� ��
���� � � ��
� Si rebem un paquet sense errors i volem avaluar la probabilitat que hagi passat per un canal o un altre, cal plantejar-ho a partir de la regla de Bayes,
� �������� �� �������� ��
� �������� �� � � �������� ��
Com que
� �������� � � � ���
i que, igualment,
� �������� � � � ���
Si ara substituïm totes les expressions ens queda, després de simplificar,
� �������� �� � ��
� � � ����
� � ��� � � ���� � � � ��
� � � ����
Finalment, si hem de decidir quin és el canal 1 i quin el canal 2, resulta evident que cal triar aquell que tingui BER més baix perquè hi passin més paquets, és a dir, aquell que tingui una probabilitat més alta que hi passi un paquet. Si el BER fos el mateix, pel canal en què van els paquets amb número parell, tenen probabilitat,
������� ��
�� � ����
i els senars,
������ ��
�� � ����
Com que
������� � ������ � ���� � � pel canal en què van els paquets amb número parell hi passen més paquets que pel canal en què van els paquets amb número senar. Per això, caldrà triar com a canal 1 aquell que tingui BER més baix.

173
Problema 17 Per tal de construir un simulador de nuclis radioactius, ens cal generar una variable aleatòria amb una distribució exponencial de constant λ. Decidim emprar el generador de números aleatoris estàndard de C, que ens proporciona una variable aleatòria X uniforme entre 0 i 1.
1. Sigui X una variable aleatòria contínua amb densitat de probabilitat fX(x). Efectuem un canvi de variable Y = g(X). Deduir la densitat de probabilitat de la variable aleatòria Y , fY (y).
2. Particularitzar el resultat anterior per una variable X uniforme entre 0 i 1. 3. Deduir-ne un mètode per obtenir la variable aleatòria exponencial a partir de la
uniforme. 4. Repetir el punt anterior per obtenir una variable aleatòria Gaussiana de mitjana
0 i variància σ2.
Solució La regla per determinar l’efecte d’un canvi de variable aleatòria, és que la probabilitat d’un succés no varia en les diferents descripcions. Així, si A és un succés que es descriu per l’interval x en la variable x i per y en la variable y, s’ha de complir que
� � � ����� � �
�
��
����� �
�
��
Si el canvi de variable és monòton i invertible, d’una banda, cal que x es transformi en y. Per altra banda,
� � ��� � i per això, el diferencial,
�� � ���
����� �
Per això, si efectuem el canvi de variable en la integral,
� � � ���� � � ����
�������� �� ������ �
�
��
�
��
����� � �
�
��
Com que això s’ha de complir per a qualsevol succés, cal que
�� � ��
����� � �� ��� �
xxxxx
xxxxx

174
Si ho particularitzem pel cas de la variable uniforme entre 0 i 1,
�� � � � i per tant,
�� � ��
����� �
Si ara volem que Y sigui una variable aleatòria exponencial de constant λ, la densitat de probabilitat seria,
�� � � ����� ��
��������
Ens queda que
� � ��� � � ���� Finalment,
� � ��
�����
Per aconseguir una gaussiana, tindríem que
�� � ��
������
�
������ �
��
����� �
La funció no és invertible i per tant, no hi ha cap canvi monòton que pugui produir una variable aleatòria Gaussiana a partir d’una variable uniforme.
Problema 18 Una baralla conté 20 cartes vermelles i 20 cartes negres. Si seleccionem 20 cartes a l’atzar, quina és la probabilitat que 10 de les seleccionades siguin vermelles i 10 en siguin negres ?
Solució Possiblement la manera més senzilla de resoldre aquest problema és emprant la definició de probabilitat de Laplace,
� ���������������
�������������
Els casos possibles ens els dóna el nombre combinatori ��
��: hem de triar 20 cartes
de 40, amb repeticions.

175
Per altra banda, per tenir els casos favorables, ens caldrà triar, per una banda, 10 cartes vermelles entre 20, amb repeticions, això és ��
��. Independentment, haurem de
fer el mateix amb les cartes negres. Així, ens queda,
� �
��
��
��
����
��
Si ara expressem els nombres combinatoris en termes de factorials,
� �
������ ���
������ ���
������ ���
Finalment, obtenim,
� ���� �
��� ��� �
Problema 19 La probabilitat que una vàlvula estigui oberta i deixi passar un cabdal � és 0.5 e-�. La probabilitat que la vàlvula estigui oberta és 0.2. Quina és la probabilitat que surti un cabdal � quan la vàlvula és oberta?
Solució Segons l’enunciat,
� ������������������ � ������ � �������������� � ���
Volem calcular,
�������������������
Si fem servir la definició de probabilitat condicionada,
� � �������������� ����������������������
�����������������
Immediatament obtenim,
� � �������������� � ������

176
Problema 20 Un examen de matemàtiques te un test de 8 preguntes amb 4 respostes possibles per pregunta. Quina és la probabilitat d’encertar 4 o més respostes omplint el test a l’atzar?
Solució Podem plantejar la solució de dues maneres diferents. D’entrada, la probabilitat d’encertar 4 o més respostes és
� � � � � � � � � � � � � � ���� en què P[k] és la probabilitat d’encertar exactament k respostes de les 8. La probabilitat d’encertar una pregunta amb quatre opcions equiprobables és
� ��
�
mentre que la probabilitat de fallar la pregunta és
� � � � � ��
�
Si suposem que cada pregunta es respon independentment de les altres, tenim que P[k] ve donada per la distribució binomial,
� � ��
�
�
�
� �
�
���
D’aquesta manera ja podem calcular P. D’altra banda, també podem plantejar P com la probabilitat del succés complementari a encertar menys de 4 respostes,
� � � � � � � � � � � � � ����
Amb aquesta fórmula, només ens cal calcular quatre P[k]’s contra les cinc de la fórmula anterior. En qualsevol cas, el resultat final és el mateix, i s’obté,
� � ������
Problema 21

177
En un centre de càlcul hi ha 10 servidors de correu electrònic. El sistema operatiu de 3 és Windows, de 6 és Linux i d’un és Solaris. La probabilitat que caigui un servidor Windows al llarg del dia és 0.7, la que caigui un servidor Linux és 0.2 i la que caigui un servidor Solaris 0.3. Quina és la probabilitat que, si ha caigut un servidor, funcioni en Windows?
Solució Si anotem per C el succés representant que ha caigut un servidor i per la inicial del sistema operatiu, el succés representant que un ordinador funcioni amb aquest sistema, de l’enunciat tenim,
� � ��
������������� � �
�
������������� � �
�
��
i que
� � � � �������������� � � � �������������� � � � ��� Volem conèixer la probabilitat que si cau un servidor, funcioni en Windows: P[W|C]. Emprem la regla de Bayes.
� � � �� � � ����
� � � � � � � � � � � � � � � ����
Calculant obtenim
� � � ���
��� ����
Problema 22 Una variable aleatòria bidimensional te la distribució de probabilitat conjunta fXY (x,y) = λ1λ2e-(λ
1-λ
2)x-λ
2y en la regió y ≥ x ≥ 0 i zero altrament. Trobar
1. La densitat de probabilitat marginal fX(x). 2. Són x i y independents ? 3. Quina és la naturalesa de les variables aleatòries x i y ? 4. Trobar la regressió lineal de y respecte de x.
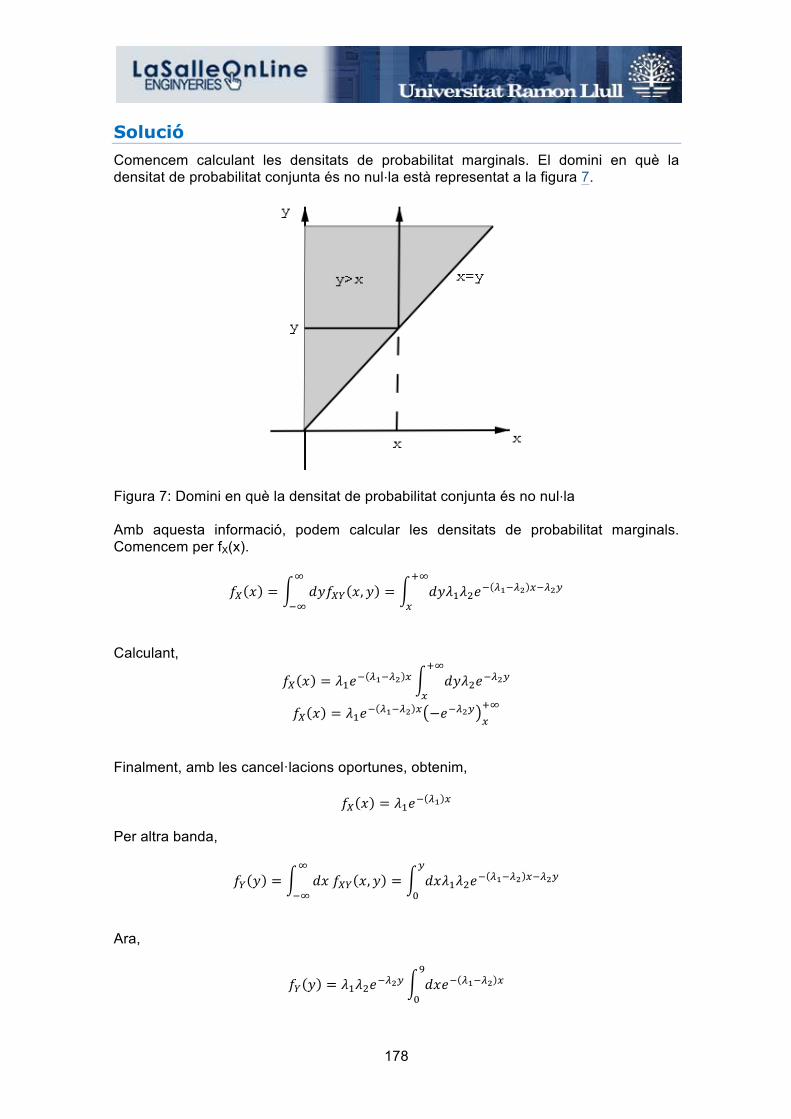
178
Solució Comencem calculant les densitats de probabilitat marginals. El domini en què la densitat de probabilitat conjunta és no nul�la està representat a la figura 7.
Figura 7: Domini en què la densitat de probabilitat conjunta és no nul�la Amb aquesta informació, podem calcular les densitats de probabilitat marginals. Comencem per fX(x).
�� � � ����� �� � � �������� ����� �����
��
�
�
��
Calculant,
�� � � ���� ����� � �����
������
�
�� � � ���� ����� � ������
�
��
Finalment, amb les cancel·lacions oportunes, obtenim,
�� � � ���� �� �
Per altra banda,
�� � � ������ �� � � �������� ����� �����
�
�
�
��
Ara,
�� � � ��������� ���� ����� �
�
�

179
�� � � ��������� �
�
������� ����� �
�
�
Calculant,
�� � �����
���������������
Veiem com, manifestament,
��� �� � � �� � �� � i per tant, les variables no són independents. Això ho podíem veure directament pel fet que en l’equació del domini en què la densitat de probabilitat conjunta és diferent de zero, els valors de x estan limitats pels valors de y. La variable x segueix una distribució exponencial, però la variable y no segueix cap de les distribucions tabulades. De fet, observant distribucions similars, es pot arribar a deduir que es tracta de la suma de dues exponencials. Per calcular la regressió lineal de x respecte de y, farem servir la fórmula
� � �� �����
��� � � ��
en què μx i μy són els valors esperats de x i y respectivament, σx
2 la variància de x i σxy
(2), la covariància de x i y. Com que x segueix una distribució exponencial, ràpidament sabem que
�� ��
��������������
� ��
���
Per altra banda, podem calcular fàcilment,
�� � ��
�
�
��� � ��
����
��
Finalment, ens falta calcular la covariància, que la podem obtenir amb la fórmula
������ �� � �����
en què < xy > es pot calcular amb la integral,

180
� �� �� ��
�
�
��
�
�
�������� ����� �����
Efectuant curosament, arribem a
������
���
Recopilant totes les fórmules, ens quedarà,
� ��
����
���
�
���
�
���
� ��
��
Simplificant, arribem a
� � � ��
��
Problema 23 Un processador disposa d’una unitat aritmètica que triga N cicles de rellotge a processar una operació. Podem modelar la probabilitat de rebre n operacions en el temps T0, igual a un cicle de rellotge, per una distribució de Poisson amb paràmetre αT0,
��� � ��
�����
������ La unitat aritmètica només pot processar una operació alhora. Si una operació arriba i la unitat aritmètica està ocupada aquesta es guarda en un buffer esperant que la unitat quedi lliure per processar-la.
1. Calcular la probabilitat p de no rebre cap operació durant un cicle de rellotge. Calcular la probabilitat q de rebre una operació durant un cicle de rellotge. Calcular la probabilitat r de rebre més d’una operació en un cicle de rellotge. Assumint que αT0 � 0, quina probabilitat entre p, q i r és la dominant ? Quina és la menor ?
2. Suposant que r és menyspreable, calcular la probabilitat de rebre n operacions en N cicles de rellotge.
3. Atès que el processador funciona amb un rellotge de període T0, passem a denominar instant k, el k-èssim cicle de rellotge. Anomenem Pn(k) la probabilitat que, en l’instant k hi hagi n operacions en espera. A partir dels resultats de l’apartat anterior i suposant r menyspreable, calcular la probabilitat que el sistema estigui lliure (això és, no calculi cap operació ni en tingui cap en espera) en un instant k. Calcular la probabilitat que el sistema estigui ocupat en el mateix instant k.

181
Solució Si, tal com indica en l’enunciat, la probabilitat de rebre n operacions en el temps T0 de donada per
��� � ��
�����
������ tindrem que
� � ��� � ����������� � ������ A més, podem calcular r com
� � � � � � � Amb això tindrem,
� � ����� ������������� � �������� ������������ � � � � � ��� �
���� Per estudiar el comportament de p, q i r en el límit αT0 → 0, podem veure els primers termes de llur expansió de Taylor al voltant de zero. Els calcularem a partir del desenvolupament de Taylor al votant de zero de l’exponencial,
�� � � � � ��
��� ��
Així,
��� � ��� ����� �� ���
� Quan αT0 → 0, p tendeix a 1, mentre que q i r tendeixen a zero. q serà però dominant respecte a r, ja que tendeix a zero com αT0, mentre que r ho fa com 2 Això vol dir que si triem un temps de rellotge tal que
��� � �
podrem menysprear r en front de q. En aquestes circumstàncies, només podrem rebre, en un cicle de rellotge, 0 o 1 operacions. Per això,
� � � � � Suposant que arriben de manera independent, la probabilitat de rebre n operacions en N cicles de rellotge vindrà donada per la distribució binomial,
� ��� ��
�������
Per altra banda, la probabilitat que el sistema estigui lliure en un moment k, cal que no calculi cap operació ni en tingui cap en espera. Per tal que no calculi cap operació, necessitem que no n’hagi arribat cap en els N cicles anteriors. Amb això no en tenim prou, doncs podria ser que el sistema tingués acumulades en el buffer, en l’instant k -

182
N operacions en espera que s’estarien tractant. Per això el buffer ha d’estar buit en aquell instant. Com que les operacions arriben de manera independent, tindrem que
������� � � �� � � � ��� �� � � � � ���� � � � Finalment, el sistema estarà ocupat si no esta lliure:
������� � � � � ������� � � � ���� � � �
Problema 24 En el Centre Europeu de Recerca Nuclear de Ginebra, s’està construint l’accelerador de partícules LHC. Aquest accelerador és un sincrotró circular de 27 km de perímetre en què circularan feixos de protons a velocitats properes a les de la llum. En quatre punts precisos, aquests feixos es faran col�lidir. Això permetrà estudiar l’estructura de la matèria a distàncies mai assolides fins ara. Per a aquest fi, en aquests punts de col�lisió s’instal·laran quatre detectors: ATLAS, CMS, Alice i LHCb. En aquest darrer, LHCb, entre les diverses estructures que el composen trobem el Scintillator Pad Detector (SPD), el detector de plaques de centellejador. Es tracta d’una paret de 10×10 m feta per 6000 peces d’un plàstic especial que s’excita quan el travessa una partícula molt energètica, tot emetent fotons. D’aquesta mena de materials se’n diu centellejadors. Per tal de capturar els fotons s’ha encastat dins del plàstic una fibra òptica (figura 8). Així, la llum emesa pel centellejador és canalitzada fins a un fotomultiplicador.

183
Figura 8: Detall del centellejador amb la fibra òptica encastada.
Un tub fotomultiplicador és un dispositiu transductor de senyal òptic a senyal elèctric. D’una banda té una finestra on arriba el senyal lluminós, el fotocàtode. Per efecte fotoelèctric, el material emet electrons en el buit de l’interior del tub. D’aquests electrons arrencats al fotocàtode se’n diu fotoelectrons. Els fotoelectrons es focalitzen i acceleren cap a una làmina metàl·lica, el primer dinode en què es multipliquen per emissió secundària. Aquest procés es repeteix diversos cops en diferents dinodes fins que finalment, els electrons emesos pel darrer dinode es recullen en l’ànode. La conversió d’un fotó en un fotoelectró dins del fotocàtode no és automàtica sinó que respon a una probabilitat η que rep el nom d’eficiència quàntica i depèn típicament de la longitud d’ona. Per tal de discernir si la partícula que ha travessat el centellejador és un fotó o un electró, cal saber l’energia que hi ha dipositat. Aquesta és proporcional a la quantitat de llum emesa i per tant, la podem determinar amb la mesura de la càrrega que dóna el fotomultiplicador que serà recollida i integrada per un circuit de propòsit específic (ASIC). En la figura 9 es representa esquemàticament aquest procés.
184
Figura 9: Esquema del procés de captura del senyal: la llum emesa pel centellejador és capturada per la fibra òptica i portada fins al fotomultiplicador que la converteix en senyal elèctric. Aquest senyal serà integrat per un circuit electrònic específic. El nombre de fotons emesos pel centellejador i que arriben a la finestra del fotocàtode es pot representar per una distribució de Poisson. Per a un electró travessant un pad típic del SPD, en podem comptar uns 200 en promig i l’eficiència quàntica és de l’ordre del 10%. En el cas del SPD, el centellejador és de plàstic orgànic, del tipus Bicron 408. Quan la partícula el travessa, el material s’excita i emet els fotons. El temps que triga un fotó a ser emès després que la partícula hagi passat, t1, ve descrit per una distribució exponencial de constant τ1 = 2ns,
�� �� ��
����
����
Alguns dels fotons emesos són capturats per una fibra òptica wave length shifter del tipus Kuraray Y11 que, al seu torn, s’excita i els remet al cap d’un temps t2, independent de t1, que també segueix una distribució exponencial, però de constant τ2 = 11ns. Aquests fotons remesos arriben finalment al fotomultiplicador. Quina és la densitat de probabilitat de la distribució del temps total t = t1 + t2 que triguen els fotons en arribar al fotomultiplicador ? Si la fibra ha aconseguit remetre n = 20000 fotons, quina és la probabilitat que n’arribin k en els primers T = 40ns ? Quin és el nombre mitjà de fotons que arribaran en els primers 40 ns ?
Solució Tal com se’ns descriu en l’enunciat, si considerem l’instant 0 com aquell en què la partícula travessa el centellejador, en l’instant t1, el centellejador emetrà el fotó. Aquest serà immediatament capturat per la fibra que, al cap de t2, emetrà un nou fotó. Suposarem que aquest fotó arriba immediatament al fotomultiplicador. Així, el temps total t que transcorre des que la partícula travessa el centellejador fins que el fotó arriba a la fibra és t = t1 + t2.
Com que suposem que les distribucions de probabilitat dels temps t1 i t2 són independents, podem calcular la densitat de probabilitat de la suma com a convolució de les densitats de probabilitat,
� � � ����� �� �� � � �� �
�
�
����
������
���
���� ����
��
�
�
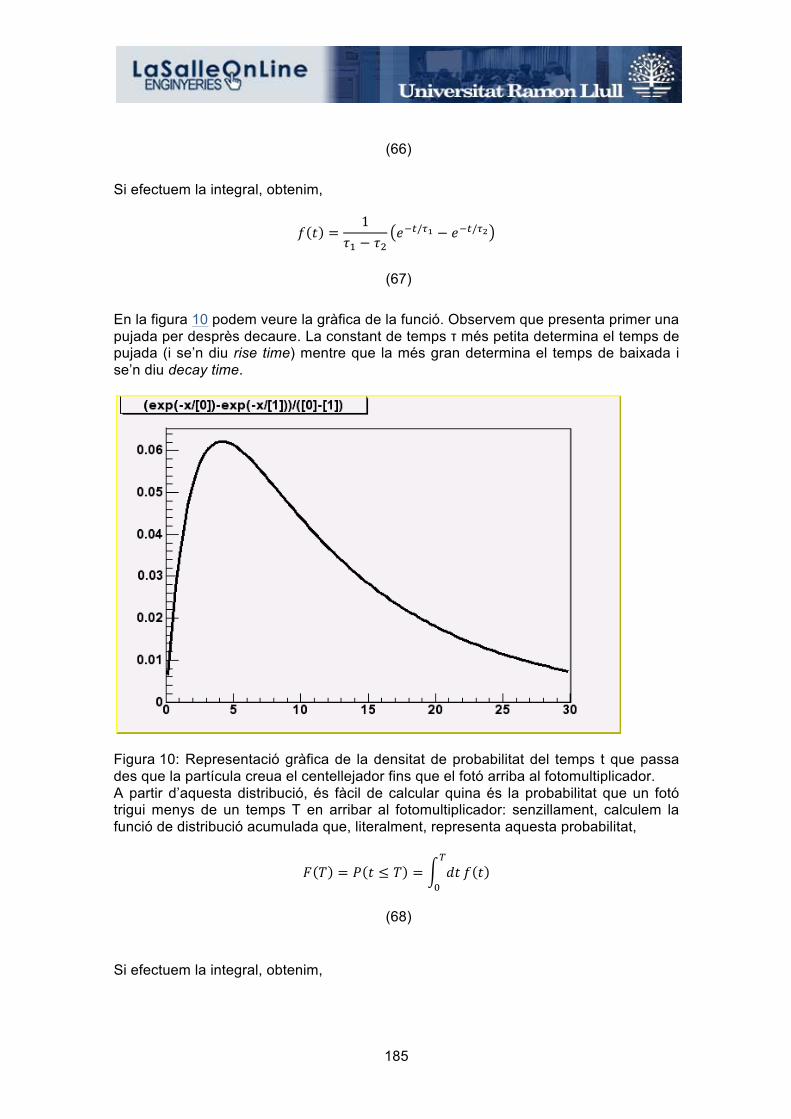
185
(66)
Si efectuem la integral, obtenim,
� � ��
�� � �������� � ������
(67)
En la figura 10 podem veure la gràfica de la funció. Observem que presenta primer una pujada per desprès decaure. La constant de temps τ més petita determina el temps de pujada (i se’n diu rise time) mentre que la més gran determina el temps de baixada i se’n diu decay time.
Figura 10: Representació gràfica de la densitat de probabilitat del temps t que passa des que la partícula creua el centellejador fins que el fotó arriba al fotomultiplicador. A partir d’aquesta distribució, és fàcil de calcular quina és la probabilitat que un fotó trigui menys de un temps T en arribar al fotomultiplicador: senzillament, calculem la funció de distribució acumulada que, literalment, representa aquesta probabilitat,
� � � � � � � � ��
�
�
� �
(68)
Si efectuem la integral, obtenim,

186
� � � ��
�
�
�
�� � �������� � ������
� � ��
�� � �����
����� � �������� � �
(69)
Amb les dades del problema, obtenim que la probabilitat que els fotons arribin en menys de 40ns és
� � � �� � ���� (70)
Així, si inicialment teníem n fotons creats, la probabilitat que n’arribin exactament k al fotomultiplicador la podem descriure per una binomial,
� � ��
��� � � � ���
(71)
El nombre mitjà de fotons vindrà doncs determinat pel valor mitjà de la distribució binomial, que és justament np. Recordem-ne ràpidament la deducció:
� � � �� � �
�
���
� ��
�
�
���
�� � � � ��� �
����
�� � � � �
�
���
�� � � � ��� �
���
� � � � � � � �
�
���
�� � � � ��� �
���
�� � � � �� � � �
�
����
����� � � � �������
� ��� � � �
�� � � � �� � � �
�
����
���� � � �������
� �� � � � � � ��� � � �� ��
En els darrers passos, hem aplicat la fórmula del binomi de Newton per arribar al resultat final. Finalment el nombre mitjà de fotons < k > és,

187
� � �� �� � �����
(72) en què, per obtenir el valor numèric, hem substituït les dades del problema. Fixem-nos que no podem comparar aquesta dada amb la de l’enunciat, que ens indica que uns 200 fotons arriben al fotomultiplicador. Això és, de fet, causat per l’atenuació que pateix la llum en el seu trajecte, en part en el centellejador i sobretot en la fibra òptica que condueix els fotons. Un altre efecte és que no tots els fotons emesos pel centellejador són capturats per la fibra, ni tots els que emet la fibra són correctament encaminats i per tant, se’n perden un bon nombre. Tots aquest efectes produeixen el factor d’atenuació 100 que comentem. Finalment, la distribució temporal dels fotons l’estudiarem en trams de 25ns, que és el període del rellotge de l’accelerador. Així, la probabilitat d’arribar en els primers 25ns, seria
�� � � �� � ���� Aquesta dada s’apropa molt als resultats experimentals. Per acabar d’afinar el resultat, caldria encara tenir en compte, però, la distribució de les possibles trajectòries dins la fibra òptica que augmenten la dispersió en els temps d’arribada.
188
189
Bibliografia
LLIBRES
Probability and Random Processes for Electrical Engineering Leon-Garcia, Alberto Addison Wesley Massachusetts, 1994 [Leon-Garcia1994]
Problemas de probabilidad y estadística Cuadras, Carles M. EUB Barcelona, 1995 [Cuadras1995]
Probabilidad, variables aleatorias y procesos estocásticos Papoulis, Athanasios EUNIBAR Barcelona, 1980 [Papoulis1980]
APUNTS
Probabilitat i Processos Estocàstics Martorell, Josep Ma. EALS Barcelona, 2001 [Martorell2001a]

190
191
Glossari
Característica Nom genèric donat a l’esperança d’una funció de la variable aleatòria estudiada. Les més importants són l’esperança i la variància.
Corba de regressió Funció que determina el millor model per a l’estimació de la relació entre dues variables. No cal que sigui una recta. De fet, la regressió lineal n’és un cas particular.
Correlació En una variable bidimensional, i igual que la covariància, quantifica també la relació lineal entre les components. La diferència és que el coeficient de correlació està normalitzat a les dispersions de les components, i el seu mòdul mai no pot superar la unitat.
Covariància En una variable bidimensional, el coeficient de covariància quantifica la relació lineal entre ambdues components.
Densitats marginals Funció densitat de probabilitat de cadascuna de les components d’una variable n-dimensional, trobada integrant respecte de les altres en tot el seu domini.
Desviació Anomenada sovint desviació típica o desviació estàndard, dóna una idea de l’amplada de la distribució, en sentit estadístic. Es calcula com l’arrel quadrada de la variància.
Elements distingibles Conjunt d’elements de la mateixa classe que tenen alguna característica que ens permet distingir-los o numerar-los.
Elements no distingibles Per contraposició amb els elements distingibles, aquells d’una mateixa classe sense cap característica que ens permeti distingir-los o numerar-los.
Espai mostral, Univers En un experiment de caràcter probabilístic, conjunt d’esdeveniments o successos possibles.
Esperança L’esperança d’una variable és el principal resum de la seva distribució. Habitualment ens hi referim també com a mitjana, i matemàticament és igual a la suma dels valors possibles ponderats amb la probabilitat que correspon a cada un d’ells.
Funció característica
192
És l’esperança de l’exponencial complexa de la variable multiplicada per un paràmetre t, del qual depèn. Aquesta funció és desenvolupable en sèries de moments de la variable, i d’aquí una de les seves principals utilitats.
Funció de distribució conjunta Concepte anàleg al de funció de distribució, però aplicat a una variable n-dimensional.
Funció de distribució La funció de distribució d’una variable X és aquella que mesura la probabilitat acumulada per cada valor d’aquesta variable.
Funció de probabilitat conjunta Indica la probabilitat que una variable n-dimensional prengui un cert valor.
Funció de probabilitat Per a una variable aleatòria discreta, la funció de probabilitat és aquella que dóna el valor de la probabilitat per cada x.
Funció densitat de probabilitat conjunta Anàlogament al cas unidimensional, indica quins valors d’una variable bidimensional són més o menys probables, donada la impossibilitat de calcular probabilitats de valors concrets.
Funció densitat de probabilitat Per a una variable contínua és la funció que dóna una idea sobre quins valors de X són més probables, tenint en compte que no té sentit preguntar-se la probabilitat que la variable prengui un cert valor.
Increments estacionaris Propietat que presenten aquells processos en què l’evolució ve marcada per l’increment temporal, independentment dels valors inicials i finals de l’índex temporal.
Increments independents Propietat que presenten aquells processos en què les variables formades per la diferència del valor en diferents instants són independents.
Jacobià En un canvi de variable, determinant que indica com es transforma l’espai quan es passa de les antigues a les noves variables.
Moments Els moments d’una variable són les esperances de les potències d’aquesta variable. L’ordre de la potència indica l’ordre del moment, que pot ser centrat en mitjana o no.
Probabilitat condicionada La probabilitat de A condicionada a B és la probabilitat que succeeixi A si sabem que ha tingut lloc B.
193
Probabilitat Segons l’axiomàtica de Kolmogorov, aplicació de l’espai de successos a l’espai dels reals, que verifica tres propietats: la probabilitat és no-nul·la, la probabilitat de l’espai mostral és 1, i la probabilitat d’una unió de successos disjunts és la suma de les seves probabilitats.
Procés estocàstic Família indexada de variables aleatòries, en què tot sovint l’índex és la variable temporal.
Recta de regressió Recta construïda amb el mètode la regressió lineal.
Regressió lineal Mètode pel qual es construeix el model lineal que millor ajusta la distribució de dues variables aleatòries.
Resultat Conjunt d’un o més esdeveniments que poden succeir simultàniament en un experiment. De vegades, alguns autors parlen també de “succés compost”.
Succés, Esdeveniment Cadascun dels resultat elementals possibles en un experiment de caràcter probabilístic.
Successos disjunts Dos successos A i B són disjunts si no poden esdevenir de forma simultània.
Successos independents Dos successos A i B són independents si l’un no condiciona l’altre.
Variable aleatòria Aplicació de l’espai mostral dels successos a l’espai real.
Variables aleatòria contínues Són aquelles variables que poden prendre un conjunt infinit no-numerable de valors.
Variables aleatòries discretes Són aquelles variables aleatòries que poden prendre un conjunt finit de valors o un conjunt infinit numerable de valors.
Variables aleatòries mixtes Una variable X s’anomena mixta quan es comporta com una V.A. contínua excepte en un conjunt discret de punts, en els quals la probabilitat d’ocurrència és no-nul·la.
194
Variància La variància d’una variable X dóna idea de la dispersió d’aquesta al voltant de la seva esperança o mitjana. Matemàticament, és igual a l’esperança del quadrat de la diferència entre X i el seu valor mitjà.

















![Modelatge-Aplicacions-Web.ppt [Modo de compatibilidad]ima.udg.edu/~sellares/EINF-ES2/Present1011/Present-Modelatge... · OOHDM SOHDM WSDM RNA Modelatge Web: EORM (I) Metodologia de](https://static.fdocuments.ec/doc/165x107/5bbf823009d3f28c0d8c2c2c/modelatge-aplicacions-webppt-modo-de-compatibilidadimaudgedusellareseinf-es2present1011present-modelatge.jpg)