Primer Sumario de An lisis y S ntesis de Mecanismos ...¡lisis y Síntesis... · aquella parte del...
23
Primer Sumario de An´ alisis y S´ ıntesis de Mecanismos: Definiciones b´ asicas. Clasificaci´ on de eslabones y pares cinem´ aticos. Cadena, eslabonamiento y mecanismo. Criterios de movilidad: Criterio de Gr¨ ubler, excepciones al criterio de Gr ¨ ubler, criterio de Paul. Jos´ e Mar´ ıa Rico Mart´ ınez. [email protected] Departamento de Ingenier´ ıa Mec´ anica Divisi´ on de Ingenier´ ıas, Campus Irapuato-Salamanca. Universidad de Guanajuato.
Transcript of Primer Sumario de An lisis y S ntesis de Mecanismos ...¡lisis y Síntesis... · aquella parte del...
Primer Sumario de Analisis y Sıntesis de Mecanismos:Definiciones basicas. Clasificacion de eslabones y pares
cinematicos. Cadena, eslabonamiento y mecanismo.Criterios de movilidad: Criterio de Grubler, excepciones
al criterio de Grubler, criterio de Paul.
Jose Marıa Rico Mart ı[email protected]
Departamento de Ingenierıa MecanicaDivision de Ingenierıas, Campus Irapuato-Salamanca.
Universidad de Guanajuato.
Contenido
1 Definiciones Iniciales.
2 Clasificacion de eslabones.
3 Clasificacion de pares cinematicos.
4 Pares cinematicos y mecanismos planos.
5 Cadena cinematica, eslabonamiento e inversion.
6 Grados de Libertad de un Mecanismo. Criterios de Movilidad.
Definiciones Iniciales: Cinematica de Maquinaria.
1 Primera Definicion: La cinematica de las maquinas se define comoaquella division del diseno de maquinas que concierne con el disenocinematico de eslabonamientos, levas, engranes, etc.
2 Segunda Definicion: La cinematica de las maquinas se define comoaquella parte del diseno de maquinas que concierne con el diseno, enbase a requerimientos de movimiento, de eslabonamientos, levas,engranes, etc.
Definiciones Iniciales: Mecanismo y Maquina.
1 Primera Definicion: Mecanismo es un dispositivo para trasformarun movimiento en otro.
2 Segunda Definicion: Mecanismo es un conjunto de cuerposconectados de tal manera que cada uno se mueve respecto a losdemas y transmiten movimiento.
3 Definicion: Maquina es un mecanismo o una combinacion demecanismos que trasmiten fuerza, desde la fuente de potencia hastala resistencia a vencer.
Definiciones Iniciales: Grados de Libertad de un Sistema ydel Movimiento de un Cuerpo Rıgido.
Definicion: Grado de libertad de un sistema se define como el numeromınimo y suficiente de variables que es necesario conocer paradeterminar el estado de un sistema.
Definicion: Grado de libertad de un cuerpo rıgido es el numero mınimo ysuficiente de variables necesarias para especificar completamentelaposicion del cuerpo.
Definiciones Iniciales: Elementos Constitutivos de unMecanismo.
Definicion: Eslabon o barra es cada uno de los cuerpos que forman unmecanismo y, de acuerdo con lo explicado, se suponen que son rıgidos yno tienen peso.
Definicion: Elementos son aquellas partes de los eslabones mediante lascuales, los eslabones pueden conectarse unos con otros.
Definicion: Par cinematico es una pareja de elementos, pertenecientes adiferentes eslabones, mantenidos permanentemente en contacto y demanera que existe movimiento relativo entre ellos.
Contenido
1 Definiciones Iniciales.
2 Clasificacion de eslabones.
3 Clasificacion de pares cinematicos.
4 Pares cinematicos y mecanismos planos.
5 Cadena cinematica, eslabonamiento e inversion.
6 Grados de Libertad de un Mecanismo. Criterios de Movilidad.
Clasificacion de eslabones.
Existen dos diferentes maneras de clasificar los eslabones deunmecanismo.
1 De acuerdo a su rigidez:Rıgidos en ambos sentidos: Tension y compresion.Rıgidos en ununico sentido.
Rıgidos a tension.Rıgidos a compresion.
2 Dependiendo del numero de elementos que contiene un eslabonEslabones binarios.Eslabones poligonales.
Ternarios.Quaternarios, etc.
Contenido
1 Definiciones Iniciales.
2 Clasificacion de eslabones.
3 Clasificacion de pares cinematicos.
4 Pares cinematicos y mecanismos planos.
5 Cadena cinematica, eslabonamiento e inversion.
6 Grados de Libertad de un Mecanismo. Criterios de Movilidad.
Clasificacion de pares cinematicos.
Existen tres diferentes criterios para clasificar los parescinematicos de un mecanismo.
1 De acuerdo alarea de contacto entre los elementos.Pares inferiores: Cuando el contacto es a traves de unasuperficie.Pares superiores: Cuando el contacto es a traves de unpunto, un conjunto finito de puntos o una lınea.
2 Dependiendo de la manera en que se mantienen los elementos encontacto.
Pares cinematicos cerrados por forma.Pares cinematicos cerrados por fuerza.
3 Dependiendo del numero de grados de libertad del movimientopermitido entre los eslabones.Esta es la mas importante desde el puntode vista cinematico.
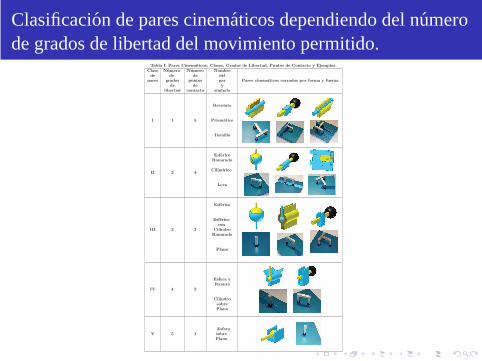
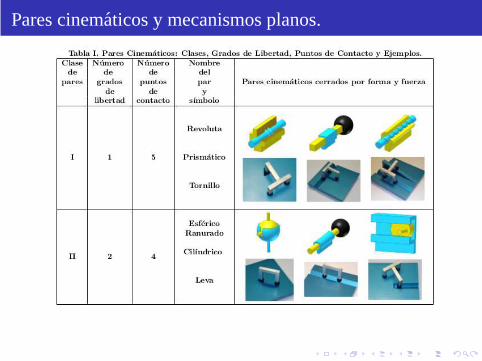
Clasificacion de pares cinematicos dependiendo del numerode grados de libertad del movimiento permitido.
Tabla I. Pares Cinematicos: Clases, Grados de Libertad, Puntos de Contacto y Ejemplos.
Clase Numero Numero Nombre
de de de del
pares grados puntos par Pares cinematicos cerrados por forma y fuerza
de de y
libertad contacto sımbolo
I 1 5
Revoluta
Prismatico
Tornillo
II 2 4
Esferico
Ranurado
Cilındrico
Leva
III 3 3
Esferico
Esferico
con
Cilindro
Ranurado
Plano
IV 4 2
Esfera y
Ranura
Cilindro
sobre
Plano
V 5 1
Esfera
sobre
Plano
Contenido
1 Definiciones Iniciales.
2 Clasificacion de eslabones.
3 Clasificacion de pares cinematicos.
4 Pares cinematicos y mecanismos planos.
5 Cadena cinematica, eslabonamiento e inversion.
6 Grados de Libertad de un Mecanismo. Criterios de Movilidad.
Pares cinematicos y mecanismos planos.
Definicion de un mecanismo plano: Un mecanismo es plano cuando todoslos eslabones del mecanismo se mueven en planos paralelos.
Pares cinematicos y mecanismos planos.
Condiciones sobre los pares cinematicos para formarmecanismos planos.
1 Si el mecanismo esta formado por pares de revoluta exclusivamente, losejes de los pares de revoluta deben ser paralelos.
2 Si uno o mas de los pares de revoluta se sustituye(n) por par(es)prismatico(s), la direccion de movimiento de los par(es) prismatico(s)debe(n) ser perpendiculares a los ejes de los restantes pares de revoluta.
3 Si uno o mas de los pares de revoluta se sustituye(n) por par(es) de leva,el(los) eje(s) de los par(es) de leva debe(n) ser paralelos a los ejes delosrestantes pares de revoluta y la direccion de movimiento de los par(es) deleva debe(n) ser perpendiculares a los ejes de los restantes pares derevoluta.
Contenido
1 Definiciones Iniciales.
2 Clasificacion de eslabones.
3 Clasificacion de pares cinematicos.
4 Pares cinematicos y mecanismos planos.
5 Cadena cinematica, eslabonamiento e inversion.
6 Grados de Libertad de un Mecanismo. Criterios de Movilidad.
Cadena cinematica.
Definicion: Cadena Cinematica. Una cadena cinematica es la union depares cinematicos y eslabones de modo que formen uno o varios circuitosolazos cerrados.
Las cadenas cinematicas se clasifican en:1 Simplescuando todos los eslabones que forman la cadena cinematica
son binarios.
2 Complejascuando en la cadena existen uno o varios eslabonespoligonales.
Eslabonamiento e Inversion.
Definicion: Eslabonamiento.Un eslabonamiento es una cadena cinematicaen la cual se ha fijado uno de sus eslabones a un marco de referencia, esteeslabon fijo se denomina marco o eslabon fijo.
Definicion: Inversion. A partir de una cadena cinematica formada porn-eslabones, puede generarse como maximon eslabonamientos diferentes.Dado un eslabonamiento, los diferentes eslabonamientos que se producenalfijar alternativamente uno de los restantes eslabones de la cadena, se llamaninversiones del eslabonamiento inicial.
Contenido
1 Definiciones Iniciales.
2 Clasificacion de eslabones.
3 Clasificacion de pares cinematicos.
4 Pares cinematicos y mecanismos planos.
5 Cadena cinematica, eslabonamiento e inversion.
6 Grados de Libertad de un Mecanismo. Criterios de Movilidad.
Grados de Libertad de un Mecanismo.
Definicion: Grados de libertad, o movilidad, de un eslaboramiento es elnumero mınimo y suficiente de variables requeridas para determinarcompletamente la posicion del eslabonamiento. Es decir, conociendo esasvariables debe ser posible conocer la posicion de cualesquiera de loseslabones que forman parte del eslabonamiento.
Definicion: Criterios de Movilidad. Son formulas o algoritmos que tienenpor objetivo determinar los grados de libertad de un eslabonamiento.
Criterio de Gr ubler
El criterio de Gr ubler esta dado por la ecuacion (1)
F = 3(N − 1)− 2P1 − P2 (1)
Donde:
F es el numero de grados de libertad del eslabonamiento,
N es el numero de eslabones que forman el eslabonamiento,
P1 es el numero de pares de la claseI que forman parte del eslabonamiento y
P2 es el numero de pares de la claseII que forman parte del eslabonamiento.
Clasificacion de Eslabonamientos.
Dependiendo del numero de grados de libertad, un eslabonamiento se clasificacomo
1 F < 0, grado de libertad o movilidad negativo. El eslabonamiento es unaestructura estaticamente indeterminada.
2 F = 0, grado de libertad o movilidad cero. El eslabonamiento es unaestructura estaticamente determinada.
3 F > 0, grado de libertad o movilidad positivo. El eslabonamiento esunmecanismo de1, 2, 3, etc. grados de libertad, segun sea el caso.
Criterio de Paul.
El criterio de Paul requiere formular las ecuaciones vectoriales de clausura deleslabonamiento cuya movilidad se desea determinar, descomponer lasecuaciones vectoriales de clausura en sus componentes escalares, que seconvierten en las ecuaciones escalares de clausura, y determinar cuantas deellas son linealmente independientes.
Entonces, el numero de grados de libertad,F, sera el numero de coordenadasLagrangianas o generalizadas que requiere la descripcion del eslabonamiento,C, menos el numero de ecuaciones escalares independientesE. Es decir
F = C − E (2)