Mekanismo eta makinen zinematika eta dinamika IGOR ... · Baranov (Errusia)…. Geroago,...
234
Mekanismo eta Makinen Zinematika eta Dinamika 1 Mekanismo eta Makinen Zinematika eta Dinamika Igor Ansoategui Belategui EUSKARA ETA ELEANIZTASUNEKO ERREKTOREORDETZAREN SARE ARGITALPENA Liburu honek UPV/EHUko Euskara eta Eleaniztasuneko Errektoreordetzaren dirulaguntza jaso du
Transcript of Mekanismo eta makinen zinematika eta dinamika IGOR ... · Baranov (Errusia)…. Geroago,...
Mekanismo eta Makinen Zinematika eta Dinamika
1
Mekanismo eta Makinen Zinematika eta Dinamika
Igor Ansoategui Belategui
EUSKARA ETA ELEANIZTASUNEKO ERREKTOREORDETZAREN SARE ARGITALPENA
Liburu honek UPV/EHUko Euskara eta Eleaniztasuneko Errektoreordetzaren dirulaguntza jaso du

Mekanismo eta Makinen Zinematika eta Dinamika
2
Mekanismo eta Makinen Zinematika eta Dinamika
3
Aurkibidea: HITZAURREA HISTORIA SARRERA TEORIKOA 1 SARRERA OROKORRA ................................................................................... 14
1.1 MAKINAREN DEFINIZIOA...................................................................... 14 1.2 MAKINAK SEKTORE GUZTIETAN ........................................................ 15 1.3 MAILAGATIK SAILKATUTAKO MAKINAK......................................... 21 1.4 MAKINEN OSAGAIAK............................................................................. 22 1.5 MAKINEN EGITURA................................................................................ 26 1.6 INGENIARIEN JARDUERA...................................................................... 27 1.7 INGENIARIEN PRESTAKUNTZA............................................................ 27
2 MEKANISMOEN ANALISI TOPOLOGIKOA.................................................. 30
2.1 OINARRIZKO KONTZEPTU TOPOLOGIKOAK ..................................... 30 2.2 MEKANISMO LAU BATEN ASKATASUN-MAILAK (GRÜBLER) ....... 37 2.3 KUTZBACH-EN KRITERIOA................................................................... 40 2.4 OINARRIZKO MEKANISMOAK.............................................................. 40 2.5 MEKANISMOEN SAILKAPENAK ........................................................... 44
3 OHIKO MEKANISMO ETA MEKANISMO BEREZIEN AZALPENA............. 47
3.1 LERRO ZUZENEKO ETA ERDIZUZENEKO MEKANISMOAK............. 48 3.2 AKOPLAMENDU-KURBEN BIDEZKO HIGIDURA PARALELOA....... 50 3.3 MUGIMENDU PARALELOAREN APLIKAZIO PRAKTIKOA ............... 50 3.4 PANTOGRAFOA ....................................................................................... 53 3.5 ITZULERA AZKARREKO MEKANISMOA............................................. 54 3.6 LOTURA UNIBERTSALAK...................................................................... 55 3.7 GENEVAko MEKANISMOA..................................................................... 57 3.8 MEKANISMO ESZENTRIKOAK (ESPEKAK) ......................................... 58 3.9 ENGRANAJEAK........................................................................................ 58 3.10 GEOMETRIA ALDAKORREKO EGITURA MOLDAKORRAK.............. 60 3.11 ENGRANAJE DIFERENTZIALAK. .......................................................... 61
Mekanismo eta Makinen Zinematika eta Dinamika
4
3.12 ASKATASUN MAILA ANITZEKO MAKINAK ....................................... 62 3.13 ZINEMATIKA PARALELOA ( PLATAFORMAK)................................... 70
4 MEKANISMO LAUEN ANALISI ZINEMATIKOAREN SARRERA ............... 71
4.1 EMAITZAREN FORMAREN ARABERAKO ANALISI ZINEMATIKOA71 4.2 MEKANISMOAREN ANPLITUDEAREN (DENBORAREN) ARABERAKO ANALISI ZINEMATIKOA .................................................................................... 77 4.3 ERABILITAKO PROGRAMA INFORMATIKOAK.................................. 79
MEKANISMO ETA MAKINEN ARIKETAK MEKANISMO ETA MAKINEN ZINEMATIKA....................................................... 83 5 MEKANISMO ETA MAKINEN ZINEMATIKA-ARIKETAK .......................... 84
5.1 ALDIUNEKO BIRAKETA-ZENTROA...................................................... 84 5.2 ABIADURA ETA AZELERAZIOAK. ARIKETA EBATZIAK.................. 88 5.3 ARIKETA PROPOSATUAK .................................................................... 122 5.4 ANALISI ZINEMATIKOA MATLAB SOFTWAREAREKIN ................. 129 5.5 ANALISI ZINEMATIKOA WORKING MODEL SOFTWAREAREKIN 135
MEKANISMO ETA MAKINEN DINAMIKA ......................................................... 139 6 MEKANISMO ETA MAKINEN DINAMIKA-ARIKETAK............................. 140
6.1 OINARRIZKO DINAMIKA (NEWTON) ................................................. 140 6.2 SOLIDO ASKEAREN DIAGRAMA ........................................................ 143 6.3 INDAR LABURTUEN METODOA ......................................................... 146 6.4 INERTZIA-INDAR ETA LAN BIRTUALAK .......................................... 148 6.5 ARIKETA PROPOSATUAK .................................................................... 166
GAI BEREZIAK 7 OREKATZEA................................................................................................... 176 8 ENGRANAJEAK ............................................................................................. 186 9 MEKANISMO ESZENTRIKOAK (ESPEKAK)............................................... 206 10 INERTZIA-BOLANTEAK ............................................................................... 212
Mekanismo eta Makinen Zinematika eta Dinamika
5
11 ENGRANAJE-TRENAK .................................................................................. 222 BIBLIOGRAFIA ETA ESKERRAK ........................................................................ 232
_HITZAURREA
Mekanismo eta Makinen Zinematika eta Dinamika
6
HITZAURREA Mekanismo eta makinen teoria buruz hamaika liburu, ikasmaterial, dokumentu eta ikergai aztertu ondoren, konturatu gara gai honi buruz liburu praktiko gutxi daudela, eta are gutxiago euskaraz. Praktiko diogunean, esan nahi dugu mekanismo eta makina errealak ikertzen ditugula, eta, gainera, forma grafiko, analitiko eta numerikoan ebatzirik. Esan nahi dugu benetako mekanismo eta makinak kalkulatuko ditugula, kalean, zerbitzuetan, garraioan…, oro har, ingeniaritza industrial mekanikoaren eremuan diseinu eta ekoizpena hartzen dugu aintzat. Argitalpen honetan jorratzen diren ereduak fisikan dute oinarria; ondorioz, fisikaren eta matematikaren oinarriak menderatu beharko dira ingeniaritza teknikoko lehenengo maila arte. Mekanismo eta makinen zinematika eta dinamikaren intuizioa azkarrago lantzeko ariketak ditugu lan honetan, eta klasean emandako teoria eta eragiketekin arlo honen kontzeptu eta ideiak hausnartzeko egokiak direla uste dugu. Beste helburu garrantzitsu bat irakasgaiaren aplikagarritasun profesionala da, hau da, ikasleek gelatik irten eta lan-mundura heltzen direnean ezagutza erabilgarriak izan dezatela nahi da. Liburu honetan urte askotako irakaskuntza-esperientzia biltzen da. Urte horietan irakasle- eta ikertzaile-talde askok mekanismo eta makinen zinematika eta dinamikako softwareak ere erabili ditugu, gure ezagutza teorikoak trinkotzeko asmotan. Erreminta informatiko horien artean multzoen diseinu eta zenbakizko analisirako Catia (DMU- Kinematics moduluarekin), Matlab (Simulink-ekin batera) eta Working- Model erabili izan ditugu. Azkenean, irakasleok konturatu ginen materia honetan hobekien prestatzeko konbinazio egokiena klaseko materia teorikoa, ariketak eta hau osatzeko, ordenagailuko praktika batzuk prestatzea zela. Hori guztia azaltzeko, hemen doa Gasteizko Ingeniaritza Eskolako Ingeniaritza Mekanikoa sailean landutako liburu hau.
Mekanismo eta Makinen Zinematika eta Dinamika
7
F=m.a E=mC2
( ) ( ) ( )20000 21
tttt −+−⋅−+= αωωθθ
_HISTORIA
Mekanismo eta Makinen Zinematika eta Dinamika
8
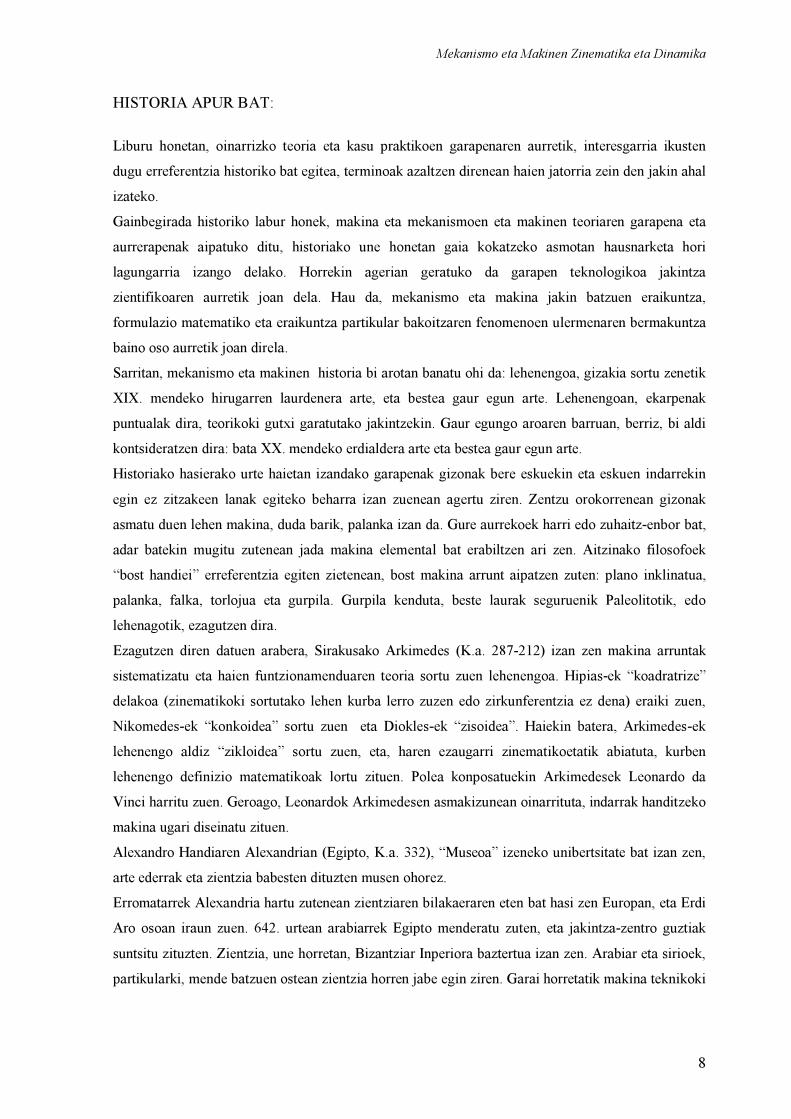
HISTORIA APUR BAT: Liburu honetan, oinarrizko teoria eta kasu praktikoen garapenaren aurretik, interesgarria ikusten dugu erreferentzia historiko bat egitea, terminoak azaltzen direnean haien jatorria zein den jakin ahal izateko. Gainbegirada historiko labur honek, makina eta mekanismoen eta makinen teoriaren garapena eta aurrerapenak aipatuko ditu, historiako une honetan gaia kokatzeko asmotan hausnarketa hori lagungarria izango delako. Horrekin agerian geratuko da garapen teknologikoa jakintza zientifikoaren aurretik joan dela. Hau da, mekanismo eta makina jakin batzuen eraikuntza, formulazio matematiko eta eraikuntza partikular bakoitzaren fenomenoen ulermenaren bermakuntza baino oso aurretik joan direla. Sarritan, mekanismo eta makinen historia bi arotan banatu ohi da: lehenengoa, gizakia sortu zenetik XIX. mendeko hirugarren laurdenera arte, eta bestea gaur egun arte. Lehenengoan, ekarpenak puntualak dira, teorikoki gutxi garatutako jakintzekin. Gaur egungo aroaren barruan, berriz, bi aldi kontsideratzen dira: bata XX. mendeko erdialdera arte eta bestea gaur egun arte. Historiako hasierako urte haietan izandako garapenak gizonak bere eskuekin eta eskuen indarrekin egin ez zitzakeen lanak egiteko beharra izan zuenean agertu ziren. Zentzu orokorrenean gizonak asmatu duen lehen makina, duda barik, palanka izan da. Gure aurrekoek harri edo zuhaitz-enbor bat, adar batekin mugitu zutenean jada makina elemental bat erabiltzen ari zen. Aitzinako filosofoek “bost handiei” erreferentzia egiten zietenean, bost makina arrunt aipatzen zuten: plano inklinatua, palanka, falka, torlojua eta gurpila. Gurpila kenduta, beste laurak seguruenik Paleolitotik, edo lehenagotik, ezagutzen dira. Ezagutzen diren datuen arabera, Sirakusako Arkimedes (K.a. 287-212) izan zen makina arruntak sistematizatu eta haien funtzionamenduaren teoria sortu zuen lehenengoa. Hipias-ek “koadratrize” delakoa (zinematikoki sortutako lehen kurba lerro zuzen edo zirkunferentzia ez dena) eraiki zuen, Nikomedes-ek “konkoidea” sortu zuen eta Diokles-ek “zisoidea”. Haiekin batera, Arkimedes-ek lehenengo aldiz “zikloidea” sortu zuen, eta, haren ezaugarri zinematikoetatik abiatuta, kurben lehenengo definizio matematikoak lortu zituen. Polea konposatuekin Arkimedesek Leonardo da Vinci harritu zuen. Geroago, Leonardok Arkimedesen asmakizunean oinarrituta, indarrak handitzeko makina ugari diseinatu zituen. Alexandro Handiaren Alexandrian (Egipto, K.a. 332), “Museoa” izeneko unibertsitate bat izan zen, arte ederrak eta zientzia babesten dituzten musen ohorez. Erromatarrek Alexandria hartu zutenean zientziaren bilakaeraren eten bat hasi zen Europan, eta Erdi Aro osoan iraun zuen. 642. urtean arabiarrek Egipto menderatu zuten, eta jakintza-zentro guztiak suntsitu zituzten. Zientzia, une horretan, Bizantziar Inperiora baztertua izan zen. Arabiar eta sirioek, partikularki, mende batzuen ostean zientzia horren jabe egin ziren. Garai horretatik makina teknikoki

Mekanismo eta Makinen Zinematika eta Dinamika
9
ederrak geratu zaizkigu, hala nola engranaje-trenak, ureztatze-sistemak, errotak, errementarien makinak… XV. mendeak Leonardo da Vinci-ren adimen eta intuizioa garatzen ikusi zuen. Apunte-liburuxka batzuetan pilatu zuen bere jakintza, baina liburuxka horiek XVIII. mendera arte ez ziren argitaratu. XVII. mendean, Galileok aldiuneko abiadurak norabide-magnitude gisa erabili zituen. Gainera, “zicloide”-a eta haren kurba elkartuak ikertu zituen; haiei, René Descartes-ek ukitzaileak marraztu zizkion. Haiek eraikitzeko, aldiuneko biraketa-zentroaren kontzeptua aurreikusten da; Johan Bernoulli-k bilatu zuen, baina Isaac Newton-i ihes egin zion. XVIII. mendean Christopher Polhen (1661-1751) suediar ingeniariaren eta haren ikasle Carl Cronstedten (1709-1779) eskutik, mekanika unibertsitatearen mundura sartu zen. Eta 1724. urtean Leupold-ek bederatzi bolumeneko mekanismoei buruzko deskribapenak gaurko erara argitaratu zituen, hau da, aske edozein makinatan kokatuak direla. Hala eta guztiz ere, 1794an L´Ecole Politechnique sortu arte ez zitzaion behar den oinarria eta bultzada erabakigarririk eman. Lagrange eta Fourier bertako irakasleen taldean zeuden. Sortzaileetako bat Gaspard Monge izan zen, geometria deskriptiboa asmatu zuena. Monge-k makina-elementuen kurtso bat ezarri zuen, eta ordura arte ezagutzen ziren makina eta mekanismo guztiak sailkatu zituen. Jean Nicole Hachette Monge-ren kideak 1806. urtean lana amaitu zuen, eta 1811n mekanismoen lehen itun gisa argitaratu zuen. 1834an André Marie Ampère-k (Hachette-ren ikasle eta l’École Politechniqueko irakaslea) Zinematika izena proposatu zuen, zientzia berri bat aztertzeko, bertan: “ mugimendu mota ezberdinak ikertuko dira, hauek sortzen dituzten indarrak kontuan izango ez dituenak”. Coriolis eta Peaucellier zinematikari ospetsuak Ampère-ren garai berekoak dira. Baina, duda barik, mende horretako izen nagusiak Euler (1707-1783) eta Watt (1736-1816) dira. Euler-ek abiadura eta azelerazioak ikertu zituen, batez ere. Watt-ek, bestalde, 1769an lurrun-makinaren (patentea 913) eredu perfekzionatua aurkeztu zuen; hala, iraultza industrialaren sorrera markatu zuen. Watt-ek ibilbide gutxi gorabehera lerrokatuak marrazteko puntu batean egokitzaileak zituzten hainbat lauki giltzatu diseinatu zituen. XVII . mendean Otto von Guericke-k hutsa erreminta gisa erabiltzen lehena izan zen, eta hutsaren garapenaren oinarriak finkatu zituen. Watt konturatu zen makina guztien arazoa kondentsazioa zela, makinen zilindroak hozten zituelako. Problema hori saihesteko, lurruna makinen zilindroetatik banandutako zilindro batean kondentsatu zuen, eta zilindro horri kondentsadore deitu zion. Watt Mattew Boulton-ekin elkartu zen lurrun-makina komertzializatzeko, eta Matthew & Boulton enpresa sortu zen. 1800. urterako 500 makina fabrikatu zituen.
Mekanismo eta Makinen Zinematika eta Dinamika
10
1800. urtean Watt-en monopolioa amaitu zenean, makinaren tamaina txikitzen hasi ziren presio handiagoak lortu ahala, eta Richard Trevithick-ek lehenengo automobilean muntatu zuen. 1870. urterako lurrun-makina erabat perfekzionatua zegoen, eta oso errendimendu handia lortzen zuen. Orduan, lehiakide gogorrak agertu zitzaizkion, hala nola gasezko motorra, energia elektrikoa eta gasolinako motorra. Horiek guztiak XX. mendeko protagonista bihurtu ziren. Carl Laval-ek, 1870ean, lurrunarekin 6000 eta 10.000 bira/min-ko biraketa-abiadurako esne-banagailuak eraiki zituen. 1829an Michel Chasles-ek geometrikoki aldiuneko biraketa-zentroaren existentzia demostratu zuen; beranduago, Poncelet-ek, 1837an, azelerazio normalaren eta tangentzialaren osagaiak gaur ezagutzen ditugun bezala adierazi zituen. Franz Reuleaux-ek 1875ean eta 1900ean idatzitako Theorestische Kinematik eta Lehrbuch Kinematik liburuetan behe- eta goi pareei buruzko ideia emankorrak utzi zizkigun, kate zinematikoaren nondik norakoak, eta kateek mekanismoekin duten erlazioa. Mekanismoen diseinuan sintesi ideia ere azaldu zuen. Reuleaux-en lanek mendearen amaiera markatu zuten, eta 1870etik aurrera mekanismoen sintesian aurrerapen handiak izan ziren. Grübler-ek, adibidez, mekanismoen askatasun-mailen kopurua lortzeko irizpidea garatu zuen; irizpide horrek zenbakizko sintesiaren hasiera-puntua osatzen du. Smith, Burmester, Memcke eta Möhr-ek abiadura eta azelerazioen kalkulu grafikoak sartu zituzten. Garai horretan eskola errusiarra agertu zen. XIX. mendean materialen ezaugarriez ere arduratzen hasi ziren. 1850ean makinen elementuen baldintza estatikoetako tentsio- eta deformazio-problemak ikertu ziren. Horren arrazoia gorputzek jasaten dituzten abiadura eta azelerazio txikiak ziren. Baina tren-makina eta trenbideen sorrerarekin haustura arraroak agertzen hasi ziren, eta, horretarako, ikerketa berriak behar ziren. Timoshenko-ren arabera, nekea terminoa sartu eta karga dinamikoekin elementuen haustura deskribatu zuen lehena Poncelet (1839) izan zen. XX. mendean ingeniaritza-eremu guztietako ekarpenak esponentzialki gehitu dira. Zinematikan Burmesterko Eskola alemana garatuz joan zen, batez ere dimentsio-sintesian zentraturik; eskola errusiarraren esfortzuak mekanismoen ibilbideen zehaztasunean eta mekanismoen sintesiaren ideia matematiko berrietan daude kokatuak. Baina mende horrek benetan markatu duen gertaera eskola amerikarraren agerpena izan da. Eskola horren jaiotza 1940aren inguruan koka daiteke. II. Mundu Gerraren urteetan, Estatu Batuetako armadaren heziketa-programek Ingeniaritza Mekanikoaren kurtsoetan Zinematika sartu zuten. Baina gerratearen ondoren, Hartenberg, Kuenzel, Goodman, Hall… zientzialariek Alemanian egin ziren lanekin kontaktuan hasi zireneko unea heldu zen. Estatubatuar horiek egonaldiak ere egin zituzten Alemanian. Zientzialari aleman askoAEBra joan ziren, ordura arte garatutako zientzia guztia Ameriketan sartu zuten eta eskolaren hasierako jarduerei sekulako bultzada eman zieten.
Mekanismo eta Makinen Zinematika eta Dinamika
11
Ikerkuntzan izan diren inbertsio handieak, eta batez ere, ordenagailuaren agerpena, Estatu Batuetan egin dena, kontuan hartu gabe, ezin dugu Zinematikaren garapenari buruz hitz egin. Purdue bezalako konferentziak, Machine Design, ASME Transactions, Mechanism and Machine Theory aldizkariak, gaur egungo Zinematikan klasikoak dira, eta hori Ault, Hall, …. eta antzeko ikertzaileen ahaleginari esker izan da. Ahalegin horiek munduaren puntu batean egin diren lanak beste tokietan ezagutaraztea lortu dute, munduko zientzialari guztien arteko kontaktua handituz, baita hizkuntza-oztopoak gaindituz ere. Lehenengo garai haietatik aipa ditzakegun beste izen batzuk: Rosenauer (Australia), A. H. Willis (Australia), Goodman (AEB), Beyer (Alemania), Artobolevskii (Errusia), Hain (Alemania), Hartenberg (AEB), Freudenstein (AEB), Bottema (Herbehereak), Bessomov (Errusia), Baranov (Errusia)…. Geroago, mekanismoekin erlazionatutako gaiei buruzko konferentziak antolatuz joan dira, eta liburu eta aldizkari teknikoen argitarapena ugarituz joan da: Hollowenko 1955, Shinghley 1961, Hirschhorn 1968…. Hizkuntzen arteko bateratze terminologikoa garatzeko esfortzua hasi zen; Hartenberg eta Goodman-ek 1960an alemaniar eta ingeles hizkuntzaren artean; 1963an, alemanaren, ingelesaren eta errusieraren artean, lehen aipatutakoaz gainera, Artobolevskii, Levitskii eta Godzenskaya adituak agertu ziren. 1969ko irailaren 29an IFToMM (International Federation for the Theory of Mechanisms and Machines) erakundearen ibilbidea hasi zen. Ideia Zakopane-n (Polonia) egindako Munduko Kongresuan sortu zen. Espainia 1975ean batu zitzaion. Zazpigarren Mundu Kongresu Sevillan egin zen 1987ko irailean. IFToMM erakundea hasiberri gutxi dituen familia bat bezala bilakatzen dabil. Bere sortzaileekin batera, mundu guztiko eta belaunaldi ezberdinetako zientzialariekin osatzen ari da. Gaur egun arte, hiru belaunaldi bereizten dira: • 1950-1979, lehenengo belaunaldia: sortzaileak eta haien lankideak, Newcastlen egin zen 4.
Mundu Kongresura arte, presidente Maunder irakaslea zegoelarik. • 1980-1995, bigarren belaunaldia: ikasleak, sortzaileek hezitako pertsonak; Milanen egin zen
9. Mundu Kongresura arte. Lehendakaria Rovetta irakaslea. • 1996 urtetik gaur arte, hirugarren belaunaldia: IFToMM erakundearen eremuan hezitako
pertsonak, 48 partaiderekin.
Mekanismo eta Makinen Zinematika eta Dinamika
12
2007. urtean 12. Mundu Kongresua egin zen. MMT-ren (Mekanismo eta Makinaren Teoria) erakunde honek ingeniaritzaren eremu orokorra hartzen du; gainera, jakintzagai berriak barne hartzen ditu. Gaur egun IFToMM-ren batzorde teknikoak hauek dira (horrela jakin dezakegu munduan zer ideia edo arlo diren interesgarri mekanismo eta makinetan): • Zinematika konputazionala • Gorputz anitzeko sistemen dinamika • Engranajeak • Giza makinen sistemak • Giltzadura eta espekak • Mekatronika • Mikromakinak • Oszilazio ez-linealak • Fidagarritasuna • Robotika • Errotoreen dinamika • Garraio-makineria • Tribologia
IFToMM erakundearen mundu-kongresuak lau urtean behin izaten dira; beraz, hurrengoa 2011n izango da, Guanajuaton (Mexiko). Aurreko puntuetan ikus dezakegun bezala, gaur egun ikertzeko eremu berriak agertu direla esan daiteke, eta zientzia berriak bildu direla, hala nola mekatronika, elektromekanika… Mekatronikan mekanika eta elektronika uztartzen dira; elektromekanikan, elektrizitatearen eta mekanikaren zientzia eta teknologiak bateratzen dira, eta abar. Gai berriak garai berrietan, eta berrientzat.

Mekanismo eta Makinen Zinematika eta Dinamika
13
_SARRERA TEORIKOA
Mekanismo eta Makinen Zinematika eta Dinamika
14
1 SARRERA OROKORRA Gaur egun, makinak eta mekanismoak, iraganean bezala, gizartearen garapena bermatzen duten jarduera guztien oinarrian daude. Gertuko etorkizunean makinaren garrantzia ez da jaitsiko, nahiz eta elektronikak, informatikak, material berriek eta abarrek asko garatuko diren.
1.1 MAKINAREN DEFINIZIOA Nahiz eta mundu osoan egunero makina ugari erabili, batez ere gehiago garatuta dauden lurraldeetan, gutxik dakite argi eta garbi makina terminoa definitzen. Espezialistak ere ez dira kontzeptu honen definizio argi eta bakar batera heldu, batez ere konplexua delako eta makinari berari ikuspuntu ezberdinak eman dakizkielako. Makinaren definizio batzuk: • Zientzia eta Teknologiaren Hiztegi Entziklopedikoaren arabera, makina: Indar edo energia
bat erabiliz eta higidura konbinatuen bidez, lan bat egin edo funtzioren bat betetzen duen aparatu edo aparatu-multzoa, bere kabuz edo erabiltzaileak maneiatuta.
• “Real Academia Española de la Lengua”: Indar baten akzioa gidatu edo erregulatzeko balio duen edozein artefaktu.
• Makinaren definizio ugarien artean badaude barregarriak baina era berean errealistak diren batzuk; adibidez, Echepare ekonomialariarena: Makina dirua sartzen zaion eta diru gehiago irteten den hodi bat da.
Aro berriko makina diseinu (eraikuntza) baten emaitza kontsideratzen da, non bi faktore-taldek esku hartzen baitute: batzuek jatorri mekaniko hutsa dute (makina osatzen duten pieza eta mekanismoak) eta beste batzuek jatorri ez-mekanikoa (estetika, merkatuak, gizarte-talka, jardunean dabilen erregimen politikoa…). Bi faktore horiek eragiten dute makina modernoek, diseinatu, eraiki eta erabiltzen diren inguru soziopolitiko eta ekonomikoaren arabera, itxura eta ezaugarri ezberdinak hartzea.
Mekanismo eta Makinen Zinematika eta Dinamika
15
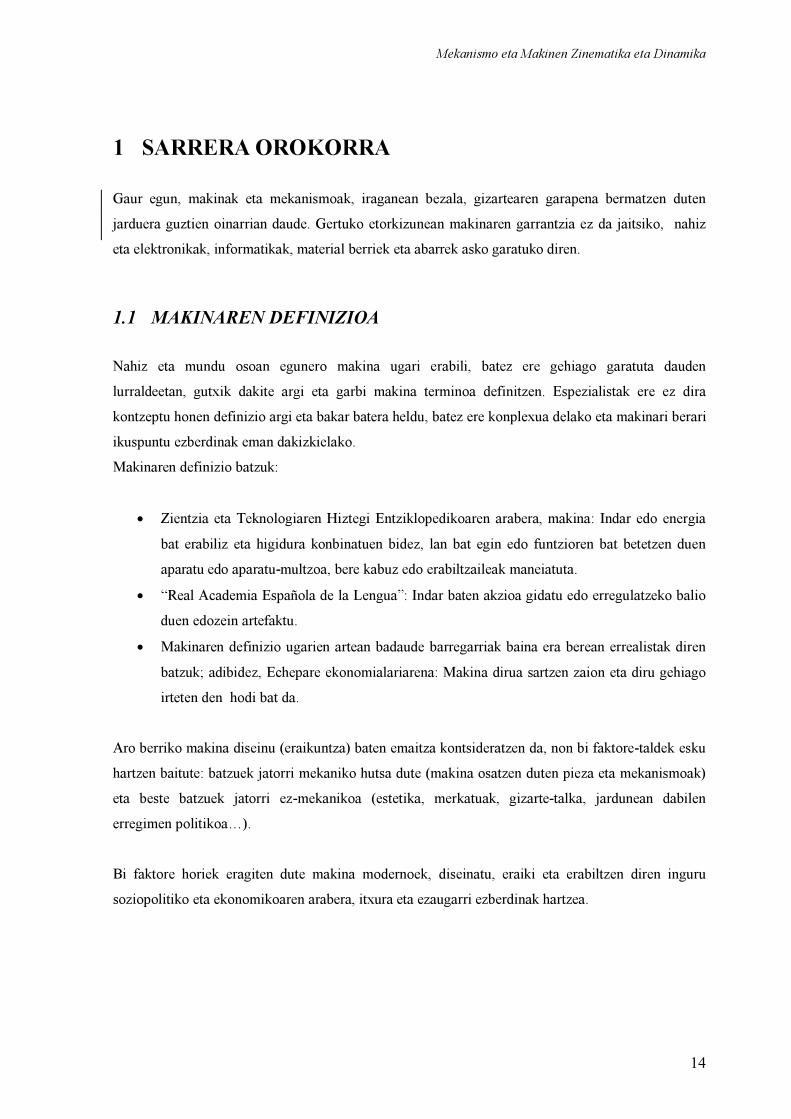
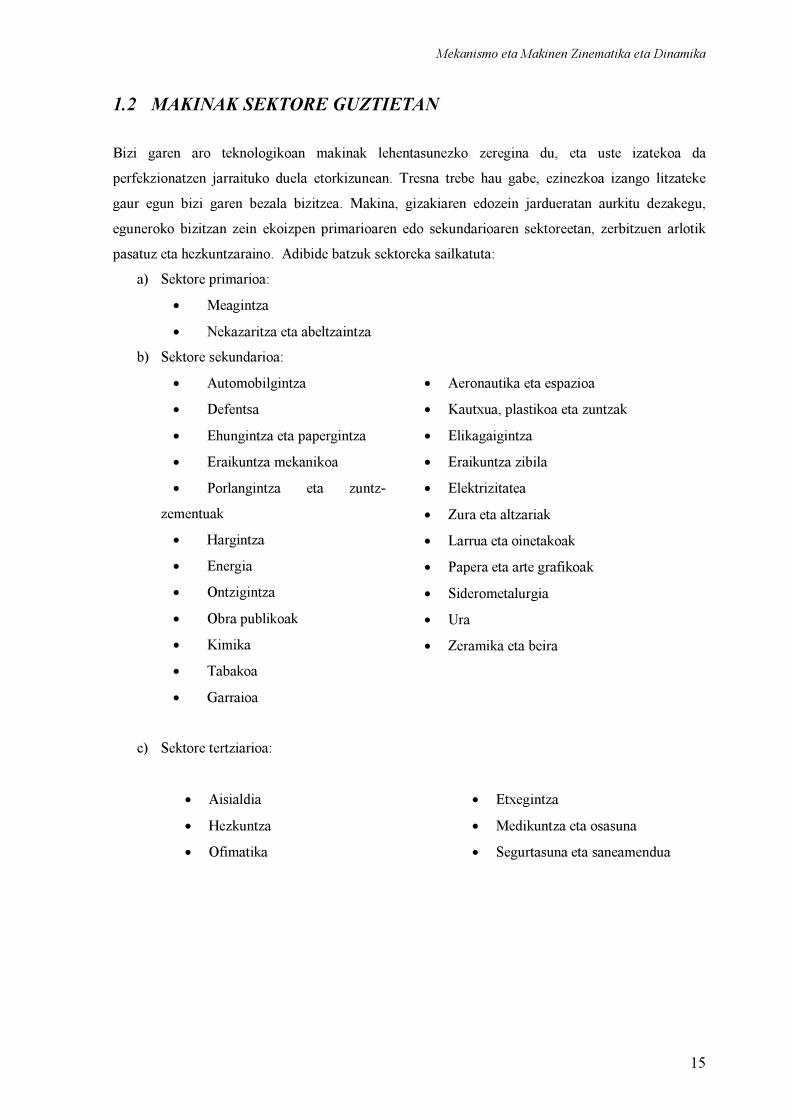
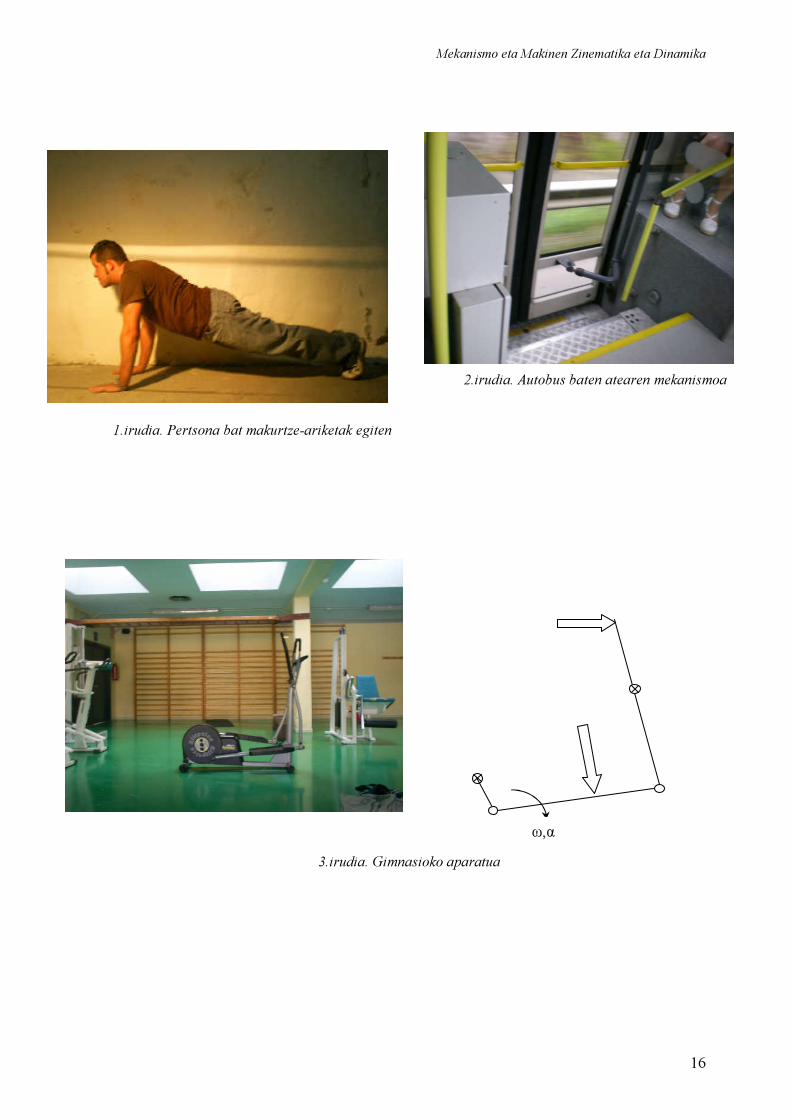
1.2 MAKINAK SEKTORE GUZTIETAN Bizi garen aro teknologikoan makinak lehentasunezko zeregina du, eta uste izatekoa da perfekzionatzen jarraituko duela etorkizunean. Tresna trebe hau gabe, ezinezkoa izango litzateke gaur egun bizi garen bezala bizitzea. Makina, gizakiaren edozein jardueratan aurkitu dezakegu, eguneroko bizitzan zein ekoizpen primarioaren edo sekundarioaren sektoreetan, zerbitzuen arlotik pasatuz eta hezkuntzaraino. Adibide batzuk sektoreka sailkatuta:
a) Sektore primarioa: • Meagintza • Nekazaritza eta abeltzaintza
b) Sektore sekundarioa: • Automobilgintza • Defentsa • Ehungintza eta papergintza • Eraikuntza mekanikoa • Porlangintza eta zuntz-
zementuak • Hargintza • Energia • Ontzigintza • Obra publikoak • Kimika • Tabakoa • Garraioa
• Aeronautika eta espazioa • Kautxua, plastikoa eta zuntzak • Elikagaigintza • Eraikuntza zibila • Elektrizitatea • Zura eta altzariak • Larrua eta oinetakoak • Papera eta arte grafikoak • Siderometalurgia • Ura • Zeramika eta beira
c) Sektore tertziarioa:
• Aisialdia • Hezkuntza • Ofimatika
• Etxegintza • Medikuntza eta osasuna • Segurtasuna eta saneamendua
Mekanismo eta Makinen Zinematika eta Dinamika
16
2.irudia. Autobus baten atearen mekanismoa 1.irudia. Pertsona bat makurtze-ariketak egiten 3.irudia. Gimnasioko aparatua
ω,α

Mekanismo eta Makinen Zinematika eta Dinamika
17
4.irudia. Plataforma jasotzaileak 5.irudia. Motozikleta baten atzeko gurpilaren esekidura
6.irudia. Ganbera hotzeko injektatzeko makina baten itxiera-mekanismoa
Mekanismo eta Makinen Zinematika eta Dinamika
18
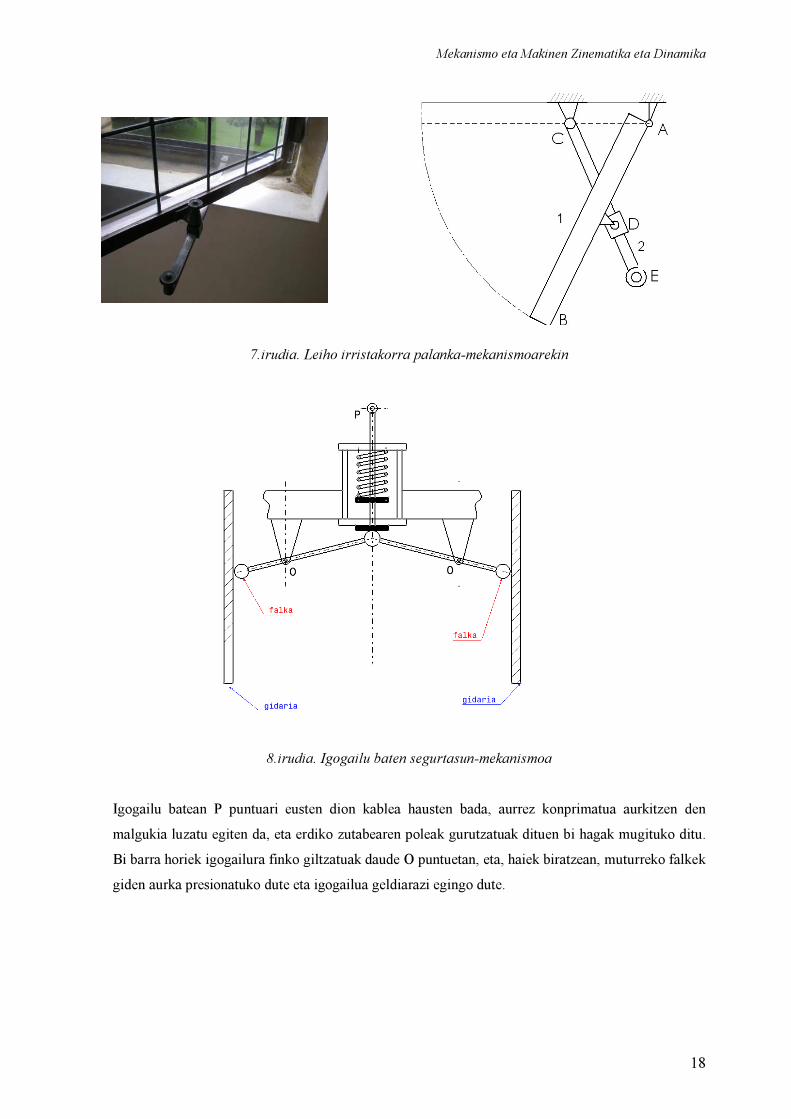
7.irudia. Leiho irristakorra palanka-mekanismoarekin
8.irudia. Igogailu baten segurtasun-mekanismoa
Igogailu batean P puntuari eusten dion kablea hausten bada, aurrez konprimatua aurkitzen den malgukia luzatu egiten da, eta erdiko zutabearen poleak gurutzatuak dituen bi hagak mugituko ditu. Bi barra horiek igogailura finko giltzatuak daude O puntuetan, eta, haiek biratzean, muturreko falkek giden aurka presionatuko dute eta igogailua geldiarazi egingo dute.

Mekanismo eta Makinen Zinematika eta Dinamika
19
9.irudia. Belauneko protesi bat
10.irudia. Oñatiko antzinako tren-makina
Mekanismo eta Makinen Zinematika eta Dinamika
20
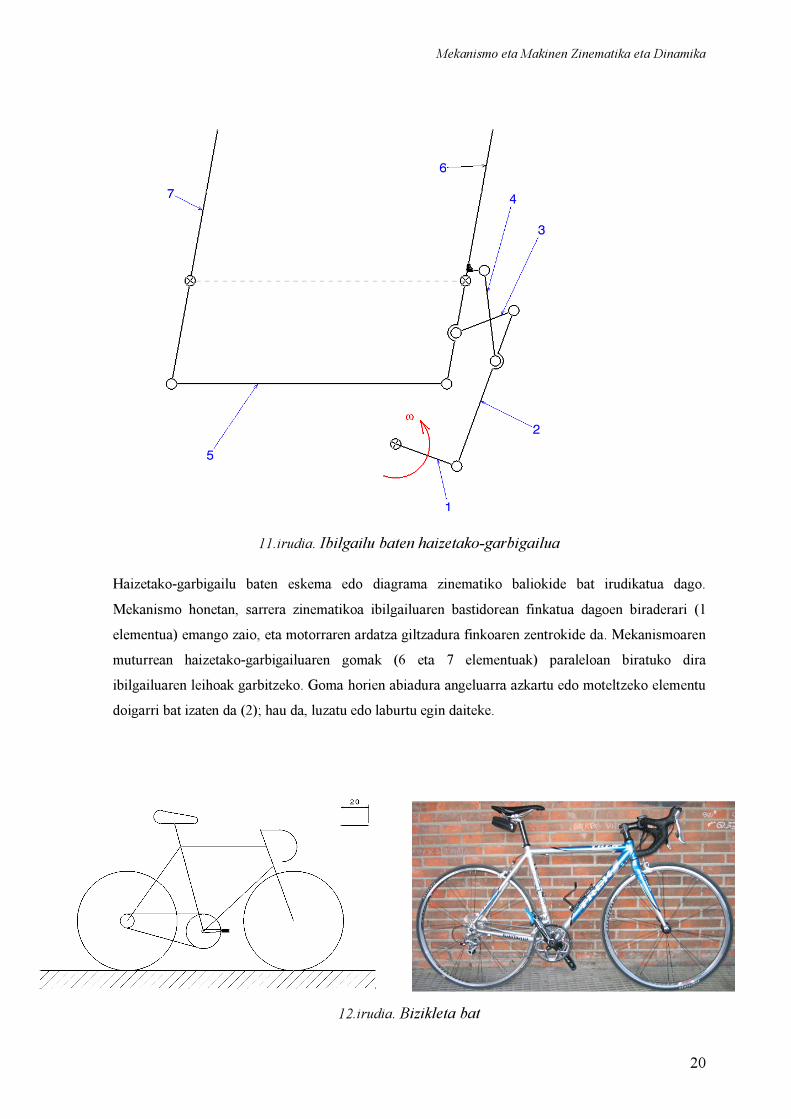
11.irudia. Ibilgailu baten haizetako-garbigailua Haizetako-garbigailu baten eskema edo diagrama zinematiko baliokide bat irudikatua dago. Mekanismo honetan, sarrera zinematikoa ibilgailuaren bastidorean finkatua dagoen biraderari (1 elementua) emango zaio, eta motorraren ardatza giltzadura finkoaren zentrokide da. Mekanismoaren muturrean haizetako-garbigailuaren gomak (6 eta 7 elementuak) paraleloan biratuko dira ibilgailuaren leihoak garbitzeko. Goma horien abiadura angeluarra azkartu edo moteltzeko elementu doigarri bat izaten da (2); hau da, luzatu edo laburtu egin daiteke.
12.irudia. Bizikleta bat
Mekanismo eta Makinen Zinematika eta Dinamika
21
1.3 MAILAGATIK SAILKATUTAKO MAKINAK
Era oso eskematikoan, sektore guztietan erabiltzen diren makina guztiak hiru talde handitan sailkatu daitezke:
a) Makina higiarazleak: Energia primarioa energia mekaniko bihurtzeaz arduratzen dira.
b) Makina eragileak: Makina higiarazletik datorren energia mekanikoa lan eraginkor bihurtzeaz arduratzen dira.
c) Tresna eta aparatuak: Ekoizte-prozesuekin zuzenki erlazionatuta ez dauden lanak kontrolatzeaz, neurtzeaz edo gauzatzeaz arduratzen dira. Taulak kategoria horien gutxi gorabeherako sailkapen bat ematen du:
a) Makina higiarazleak: • Enbolo-makinak • Biraketa-makinak
b) Makina eragileak: 1. Makina-erreminta: Metalak lantzeko Zura lantzeko Harria lantzeko 2. Garraiorako makina: Pertsonena Solidoena Jariakinena 3. Makina eragileak: Enbalatzeko makinak Etiketatzeko makinak Sailkatzeko makinak Ontzietan sartzeko makinak Makina dosifikatzaileak
Mekanismo eta Makinen Zinematika eta Dinamika
22
c) Tresna eta aparatak: Kirurgia- eta errehabilitazio-tresnak Optika-tresnak
Idazteko, marrazteko eta erreproduzitzekoak Neurketa eta saiakuntzak egiteko aparatuak Jolas- eta kirol-aparatuak Etxean erabiltzeko aparatuak Proiekziozko aparatuak (solido eta likidoena) Simulazio-aparatuak Eskuzko aparatuak (eskuz, elektrikoki edo pneumatikoki eraginak)
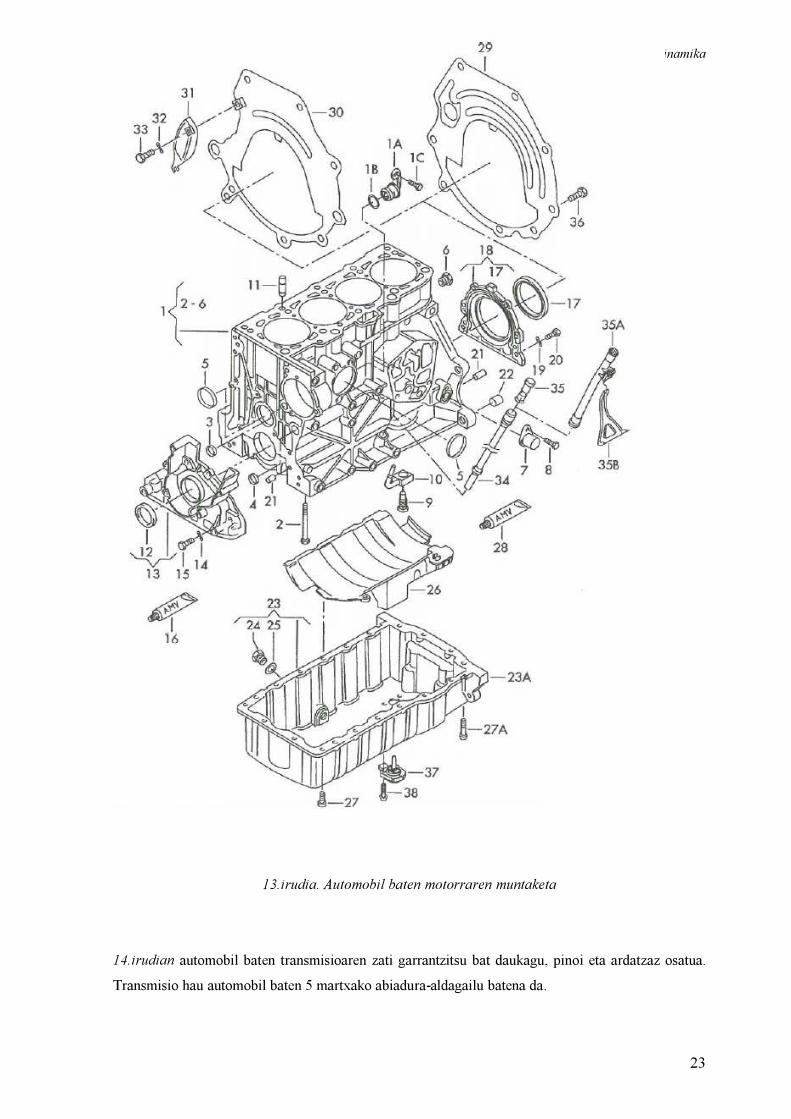
1.4 MAKINEN OSAGAIAK Makinak elementu, osagai edo piezaz osatua daude, batzuk finkoak eta beste batzuk higikorrak, baina guztiak akoplatuak, batzuetan makina berean eragiketa ezberdinduak gauzatzeko prest (askotariko mekanismoz osatuak). Hala, oso pieza gutxiz osatutako makina arruntak daude, baina baita hamarka mila piezaz osatutako makina konplexuak ere. Serieko automobil batek 20.000 pieza inguruko multzoa osatzen du. 13. irudian automobil-motor baten pieza multzoa ikus dezakegu.
Mekanismo eta Makinen Zinematika eta Dinamika
23
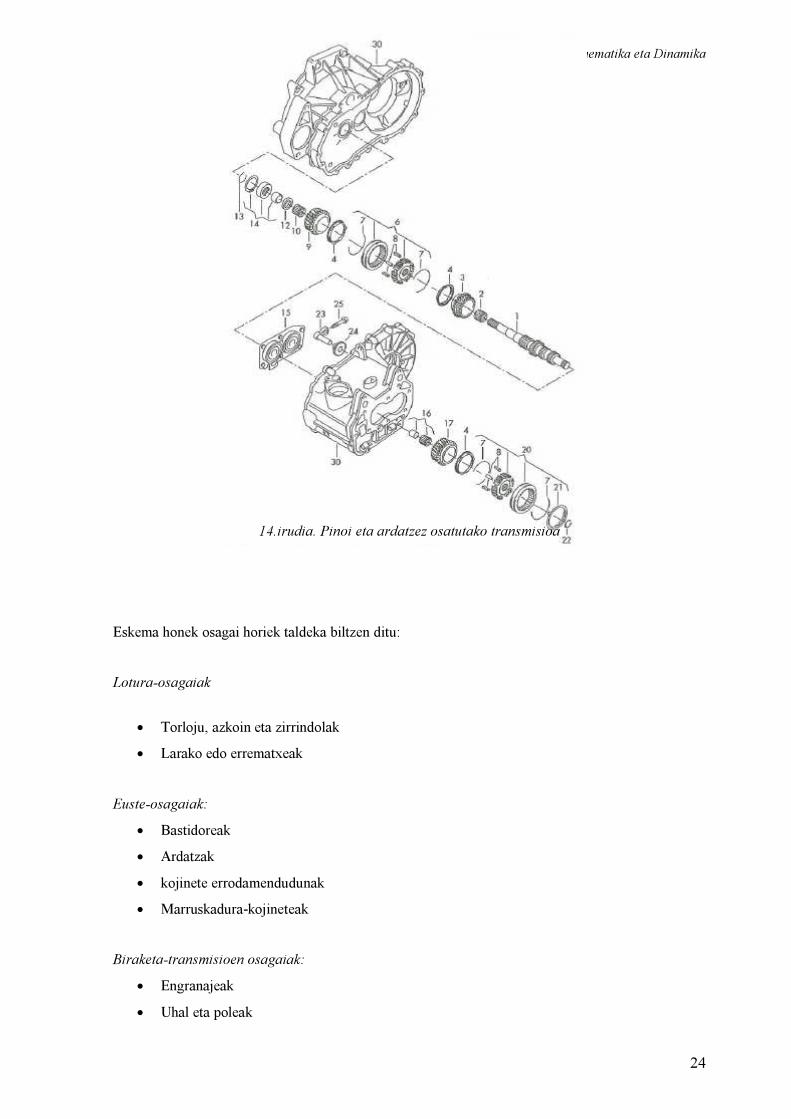
13.irudia. Automobil baten motorraren muntaketa 14.irudian automobil baten transmisioaren zati garrantzitsu bat daukagu, pinoi eta ardatzaz osatua. Transmisio hau automobil baten 5 martxako abiadura-aldagailu batena da.
Mekanismo eta Makinen Zinematika eta Dinamika
24
14.irudia. Pinoi eta ardatzez osatutako transmisioa Eskema honek osagai horiek taldeka biltzen ditu: Lotura-osagaiak • Torloju, azkoin eta zirrindolak • Larako edo errematxeak
Euste-osagaiak: • Bastidoreak • Ardatzak • kojinete errodamendudunak • Marruskadura-kojineteak
Biraketa-transmisioen osagaiak: • Engranajeak • Uhal eta poleak
Mekanismo eta Makinen Zinematika eta Dinamika
25
• Kable eta poleak • Kate eta gurpilak • Ardatzak • Marruskadura-gurpilak
Mugimendu ez-birakariaren transmisiorako osagaiak: • Bielak • Biradera eta birabarkiak • Pistoi eta irristailuak • Espeka eta jarraitzaileak
Elementu pneumatiko eta hidraulikoak: • Zilindroa • Balbula • Erreguladorea • Ponpak
Kontrol-sistemen osagaiak: • Sentsoreak
Makinek askotariko osagaiak dituzte, eta osagaiak egiteko materialak ere askotarikoak dira. � Burdina eta burdin aleazioak � Aluminioa, kobrea, magnesioa … eta aleazioak � Zura, larrua eta goma edo kautxua. � Plastikoa, zuntz sintetikoak eta material zeramikoak.
Begi-bistakoa da makina bateko osagai guztiek akats gabe jasan behar dituztela eragiten dieten akzio guztiak. Akzio horien kopurua nahiko mugatua da. Hauek dira garrantzitsuenak: � Indar eta pareak, jarraituak eta ez-jarraituak � Talka eta bibrazioak � Eragin termikoak � Eragin korrosiboa
Mekanismo eta Makinen Zinematika eta Dinamika
26
Energia-eragilea sortzea, jasotzea edo eraldatzea
Higidura eta indarrak eraldatzeko sistema
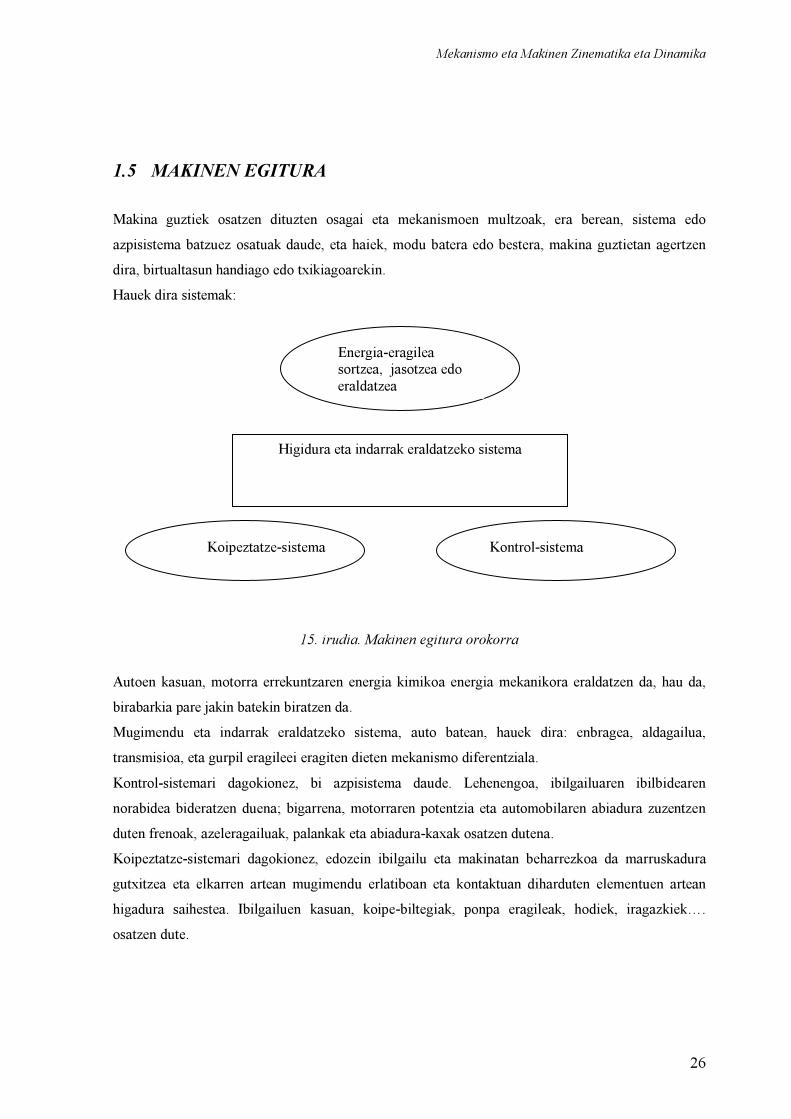
1.5 MAKINEN EGITURA Makina guztiek osatzen dituzten osagai eta mekanismoen multzoak, era berean, sistema edo azpisistema batzuez osatuak daude, eta haiek, modu batera edo bestera, makina guztietan agertzen dira, birtualtasun handiago edo txikiagoarekin. Hauek dira sistemak: Koipeztatze-sistema Kontrol-sistema
15. irudia. Makinen egitura orokorra Autoen kasuan, motorra errekuntzaren energia kimikoa energia mekanikora eraldatzen da, hau da, birabarkia pare jakin batekin biratzen da. Mugimendu eta indarrak eraldatzeko sistema, auto batean, hauek dira: enbragea, aldagailua, transmisioa, eta gurpil eragileei eragiten dieten mekanismo diferentziala. Kontrol-sistemari dagokionez, bi azpisistema daude. Lehenengoa, ibilgailuaren ibilbidearen norabidea bideratzen duena; bigarrena, motorraren potentzia eta automobilaren abiadura zuzentzen duten frenoak, azeleragailuak, palankak eta abiadura-kaxak osatzen dutena. Koipeztatze-sistemari dagokionez, edozein ibilgailu eta makinatan beharrezkoa da marruskadura gutxitzea eta elkarren artean mugimendu erlatiboan eta kontaktuan diharduten elementuen artean higadura saihestea. Ibilgailuen kasuan, koipe-biltegiak, ponpa eragileak, hodiek, iragazkiek…. osatzen dute.
Mekanismo eta Makinen Zinematika eta Dinamika
27
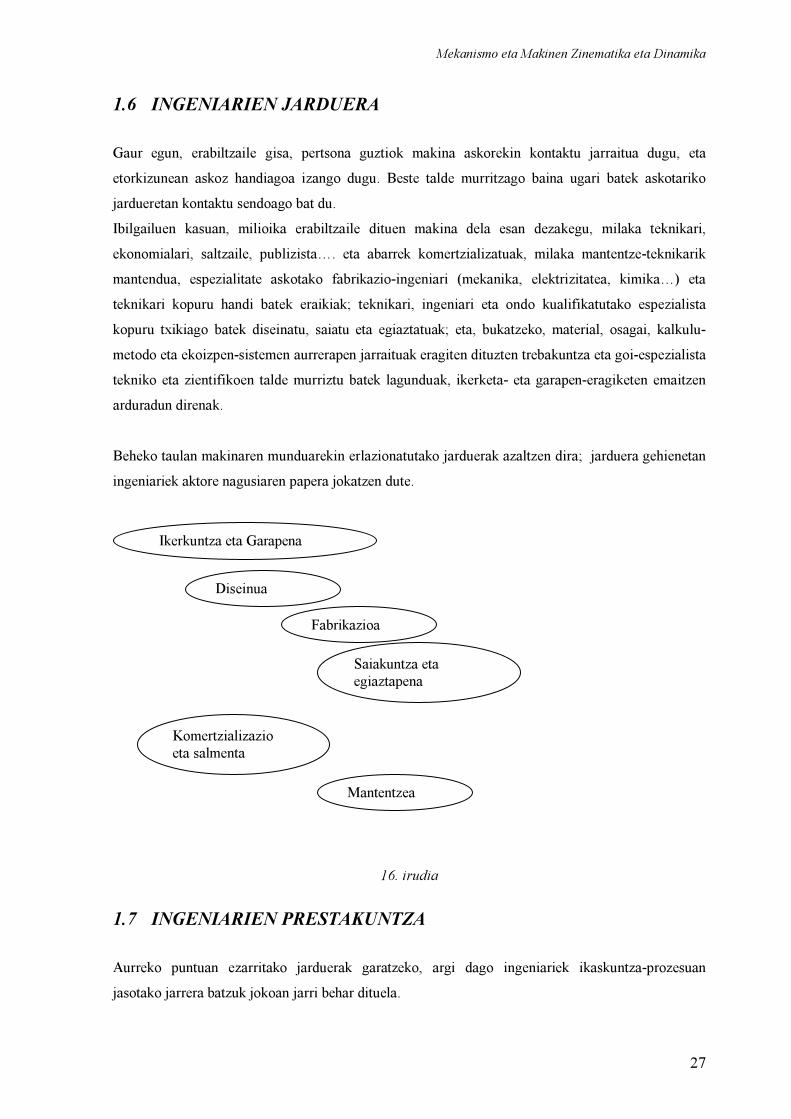
1.6 INGENIARIEN JARDUERA Gaur egun, erabiltzaile gisa, pertsona guztiok makina askorekin kontaktu jarraitua dugu, eta etorkizunean askoz handiagoa izango dugu. Beste talde murritzago baina ugari batek askotariko jardueretan kontaktu sendoago bat du. Ibilgailuen kasuan, milioika erabiltzaile dituen makina dela esan dezakegu, milaka teknikari, ekonomialari, saltzaile, publizista…. eta abarrek komertzializatuak, milaka mantentze-teknikarik mantendua, espezialitate askotako fabrikazio-ingeniari (mekanika, elektrizitatea, kimika…) eta teknikari kopuru handi batek eraikiak; teknikari, ingeniari eta ondo kualifikatutako espezialista kopuru txikiago batek diseinatu, saiatu eta egiaztatuak; eta, bukatzeko, material, osagai, kalkulu-metodo eta ekoizpen-sistemen aurrerapen jarraituak eragiten dituzten trebakuntza eta goi-espezialista tekniko eta zientifikoen talde murriztu batek lagunduak, ikerketa- eta garapen-eragiketen emaitzen arduradun direnak. Beheko taulan makinaren munduarekin erlazionatutako jarduerak azaltzen dira; jarduera gehienetan ingeniariek aktore nagusiaren papera jokatzen dute.
16. irudia
1.7 INGENIARIEN PRESTAKUNTZA Aurreko puntuan ezarritako jarduerak garatzeko, argi dago ingeniariek ikaskuntza-prozesuan jasotako jarrera batzuk jokoan jarri behar dituela.
Ikerkuntza eta Garapena
Diseinua
Saiakuntza eta egiaztapena
Fabrikazioa
Mantentzea
Komertzializazio eta salmenta
Mekanismo eta Makinen Zinematika eta Dinamika
28
Jarrera horiek banandutako hiru eremutan jaso behar dira: 1. Ezagutza mailakoa 2. Psikomotorra 3. Afektibo, borondate edo nahimenezkoa
Ezagutza mailako jarrera ezagutza berriak eskuratzeko abileziari dagokio; psikomotorra eskuzko trebetasuna da; eta afektibo, borondate edo nahimenezko jarrera plano psikologikoan jasotakoa da, hala nola nork bere buruan segurtasuna izatea, lankideekin erlazionatzeko gaitasuna… Ingeniarien kasuan, eragin-eremu nagusiak hauek dira: ikerkuntza eta garapena, diseinua, egiaztapena eta saiakuntza, fabrikazioa eta eragiketa, eta mantentzea. Ikerkuntzak eta garapenak aldaketa teknologikoak bultzatzen dituzte; eragiketa eta mantentzeari, berriz, teknologia estatiko deritze. Edozein eragiketa exekutatzeko orduan domeinu batzuetan edo besteetan jarrerak behar ditu ingeniariak: ikerkuntzan, garapenean eta diseinuan, ezagutzak beharrezkoagoak dira eskuzko trebetasunak baino; bestalde, eragiketa- eta mantentze-faseetan eremu psikomotorreko jarrera gehiago behar dira. Oro har, ingeniari eta teknikari espezialisten izendapenak banatzen baditugu, argi dago lehenengoen kasuan ezagutza mailako jarrerak gaitasun psikomotorrei gailentzen edo nagusitzen zaizkiela. Ezagutza mailako domeinuan eta makineriaren eremuan ingeniariek makinen topologian ezagutzak behar dituzte, hau da, makinen mekanismoek dituzten azpisistema motak, formak, erabilerak….. Makinen analisiei buruzko ezagutzak behar dira, makinen zatiak ongi interpretatzeko, eta bereziki multzo edo atalen mugimendu eta indarren arteko erlazioak ezagutzeko. Osagai mekanikoen diseinu- eta kalkulu-ezagutzak behar dira, beren bizitza erabilgarrian akatsik emango ez duten makinak fidagarriak eraikitzeko. Makinen sintesi-ezagutzak behar ditu, halaber, makina berrien aldaketa edo berriztapenak aldaketa beharren funtzioan egin ahal izateko ere. Domeinu psikomotorrean makinen kontrol-zerbitzurako tresnerian (sentsoreak…) abileziak behar ditu ingeniariak, baita saiakuntza-, egiaztapen- eta mantentze-eremuetan ere.

Mekanismo eta Makinen Zinematika eta Dinamika
29
Amaitzeko, afektibo, borondate edo nahimenezko domeinuan ingeniariak, makinen arloko eta espezialitate askotako beste profesional anitzekin elkarlanean diharduenez, norberagan segurtasun maximoa behar du. Jarrera horien guztien ikaskuntza izateko, aurretik landutako beste jarrera batzuen behar dira, ingeniaritza-karrerako beste diziplina batzuetan jasoak. Oinarrizko materietatik, matematika eta fisika (mekanika, bereziki) nabarmentzen dira. Eta materia teknologikoen artean, marrazketa teknikoa, elastikotasuna eta materialen erresistentzia, teknologia mekanikoa eta materialen ezagutzak.
Mekanismo eta Makinen Zinematika eta Dinamika
30
2 MEKANISMOEN ANALISI TOPOLOGIKOA Mekanismoen ikerketa topologikoak haien konfigurazio geometrikotik eta bertatik deriba daitezkeen ondorioetatik datoz. Hala, mekanismoen ikerketa topologikoak arlo hauek hartzen ditu: mekanismoen osagaien formen analisia, elementu kopurua, elementuek egin ditzaketen mugimendu motak, zuzentzen dituzten legeen funtzioak… 2.1 OINARRIZKO KONTZEPTU TOPOLOGIKOAK: PIEZA Mekanismo bat osatzen duten zati guztiak banatzen baditugu, atal zatiezin batzuetara heltzen gera, zurrunak izan ohi direnak (baina ez beti). Elementu horiei pieza deritze. GORPUTZA Elkarren artean mugimendurik ez duten eta zurrunki lotuta dauden piezen multzoari gorputza deritzo. Gorputz bat mekanismo baten unitate higikorra da, pieza batekin edo anitzekin lotuta egon daitekeena. Mekanismo baten gorputzek ez daukate derrigor zurrunak izan beharrik, elastikoak (malgukiak…) edo jariakorrak edo ez-mekanikoak izan daitezke, hala nola hodi bateko olioa… Aplikatutako kanpo-eragina eragiten duen gorputzari (adibidez, motor eragile batetik datorren indar edo parea) gorputz gidari deritzo. Kanpo-akzioa jasaten duen gorputzari gidatua deitzen zaio, eta mekanismo batean finko dagoenari bastidore. Mekanismo baten beste gorputz guztiek, oro har, gidari edo gidatu gisa batera lan egiten dute.
Mekanismo eta Makinen Zinematika eta Dinamika
31
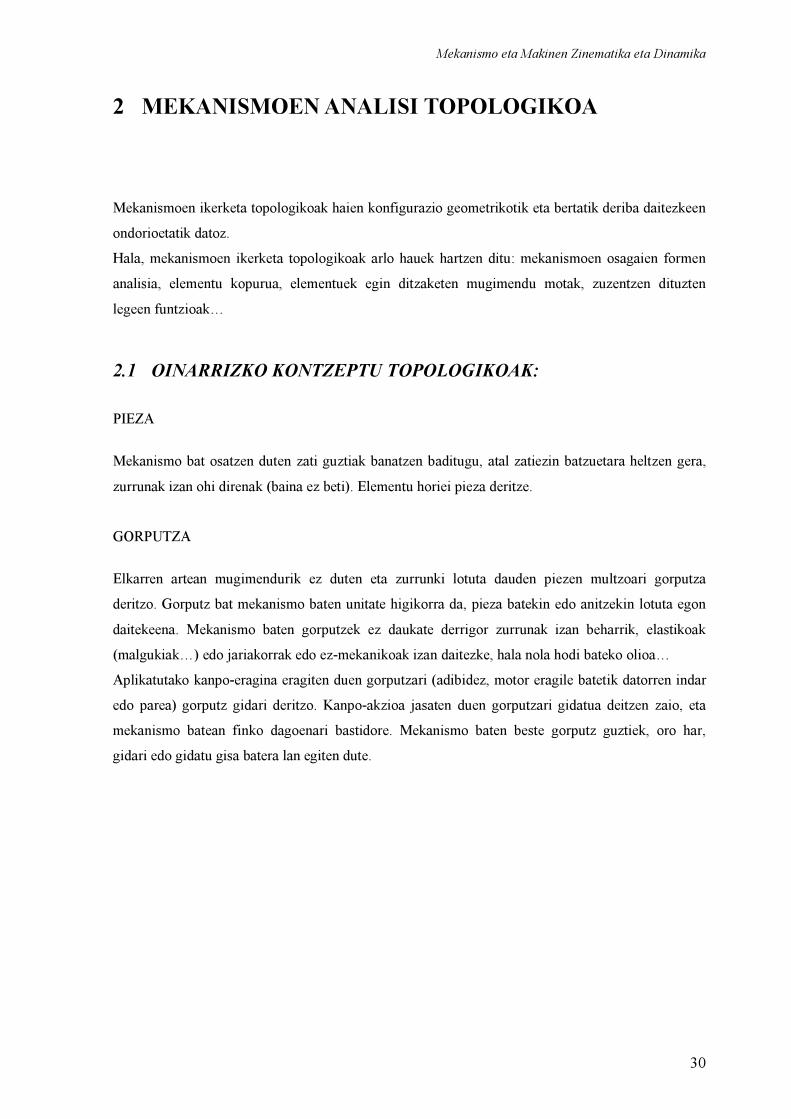
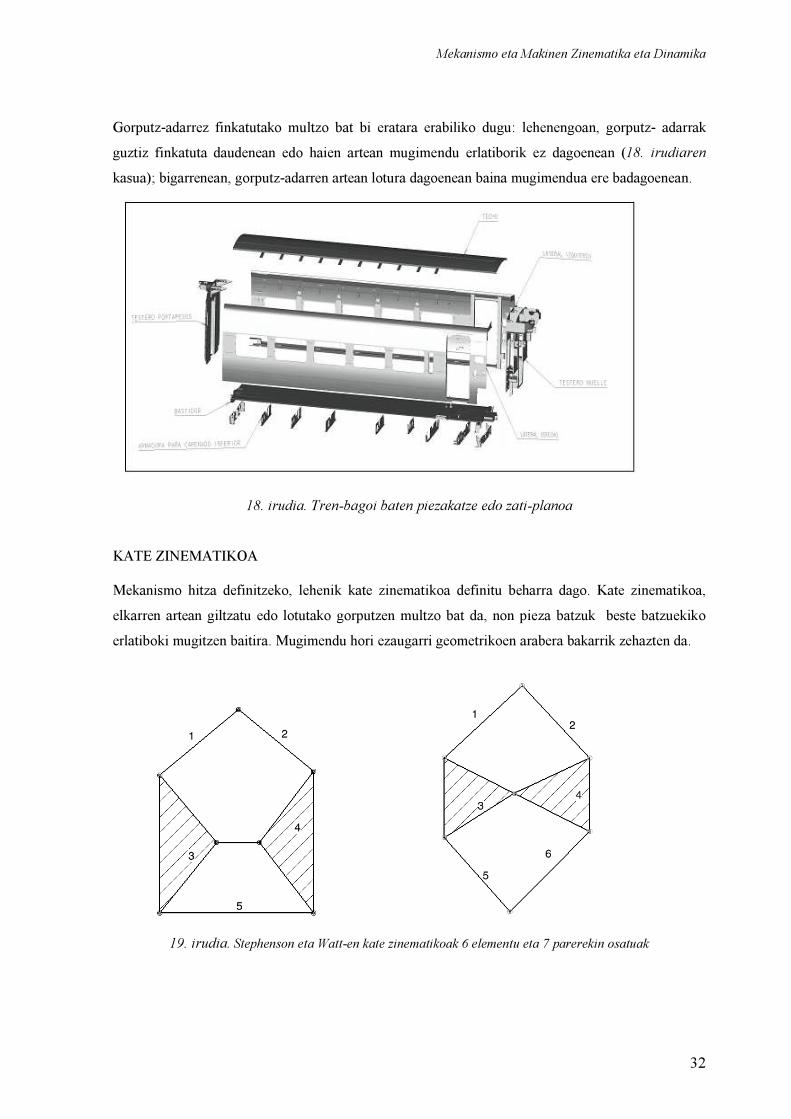
17. irudia. Hiru eta bost ateko automobilen karrozeria. Goiko 17. irudian, automobil baten oinarrizko atal edo bi gorputz-adar ditugu. Bertako gorputz atalek gorputz bakarra osatzen dute haien loturak soldadura bidez eginda daudelako. (1) eta (2) izendapenak modelo bakoitzaren txasis edo karrozeriari dagokio, eta aurreko aldean dauden (3) eta (4) atalak multzoari itsatsitako estaldura-xaflak dira. MULTZOA Hitz nahiko anbiguoa suertatu daitekeen arren, esan daiteke makina eta mekanismoen multzo bat gorputz-adarrez edo atalez osatutako talde bat dela. Beheko 18. irudian tren bateko kotxe baten mihiztapen edo muntaketa agertzen da. Kotxearen kuboa osatzen duten bastidore, sabai, aldameneko txasis, buru-horma …. Aske hartzen baditugu, pieza bakar eta independientez osatuta daude, eta, era berean, atal bakoitzak gorputz-adar bat osatuko du, baina sei alde horiek soldatu, lotu edo itsasten baditugu, zinematikoki gorputz-adar bakarra izango dira, eta multzoa osatuko dute.
Mekanismo eta Makinen Zinematika eta Dinamika
32
Gorputz-adarrez finkatutako multzo bat bi eratara erabiliko dugu: lehenengoan, gorputz- adarrak guztiz finkatuta daudenean edo haien artean mugimendu erlatiborik ez dagoenean (18. irudiaren kasua); bigarrenean, gorputz-adarren artean lotura dagoenean baina mugimendua ere badagoenean.
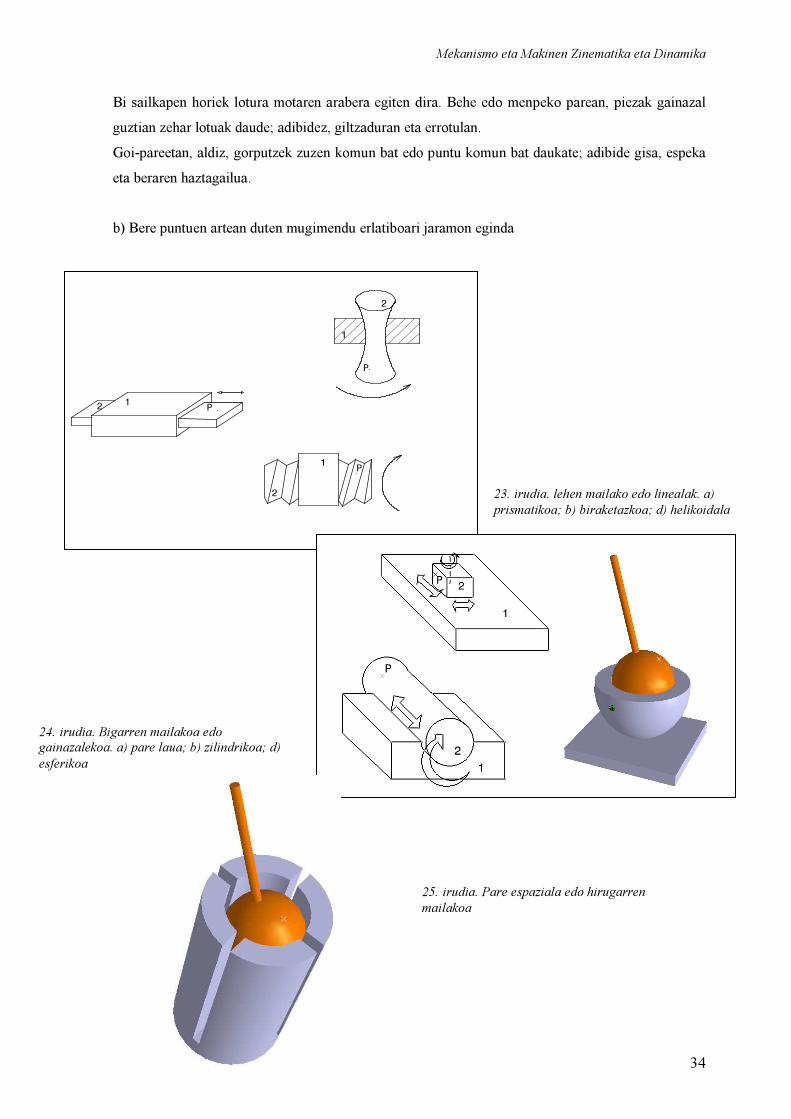
18. irudia. Tren-bagoi baten piezakatze edo zati-planoa KATE ZINEMATIKOA Mekanismo hitza definitzeko, lehenik kate zinematikoa definitu beharra dago. Kate zinematikoa, elkarren artean giltzatu edo lotutako gorputzen multzo bat da, non pieza batzuk beste batzuekiko erlatiboki mugitzen baitira. Mugimendu hori ezaugarri geometrikoen arabera bakarrik zehazten da.
19. irudia. Stephenson eta Watt-en kate zinematikoak 6 elementu eta 7 parerekin osatuak

Mekanismo eta Makinen Zinematika eta Dinamika
33
MEKANISMOA Mekanismoa kate zinematiko bat da, non gutxienez pieza bat finko kontsideratzen baita. Pieza finko horri bastidore deritzo, eta erreferentzia-puntu finkotzat daukagu (lurra).
20. irudia. Maketa baten kojinetea (kate zinematikoaren pare bat bastidorera finkatzea) Badaude beste kontzeptu teoriko batzuk ere, eta komeni da modu laburrean definitzea. Adibidez: PAREA EDO INDAR PAREA: Kontaktuan dauden eta mugimendu erlatiboa daukaten mekanismo baten 2 pieza edo gehiagoren artean osatzen den multzoa. Pareen arteko sailkapena modu askotara egin daiteke: a) Parea osatzen duten gorputzen arteko gainazal-kontaktuaren funtzioaren arabera, bi motatako pareak daude: • Behe edo gainazal-kontaktuko parea • Goi-parea, edo kontaktu lineal edo puntualeko parea
22. irudia. Goi pare puntuala 21. irudia. Behe parea
Mekanismo eta Makinen Zinematika eta Dinamika
34
P
P
12
1
2
1
2
P
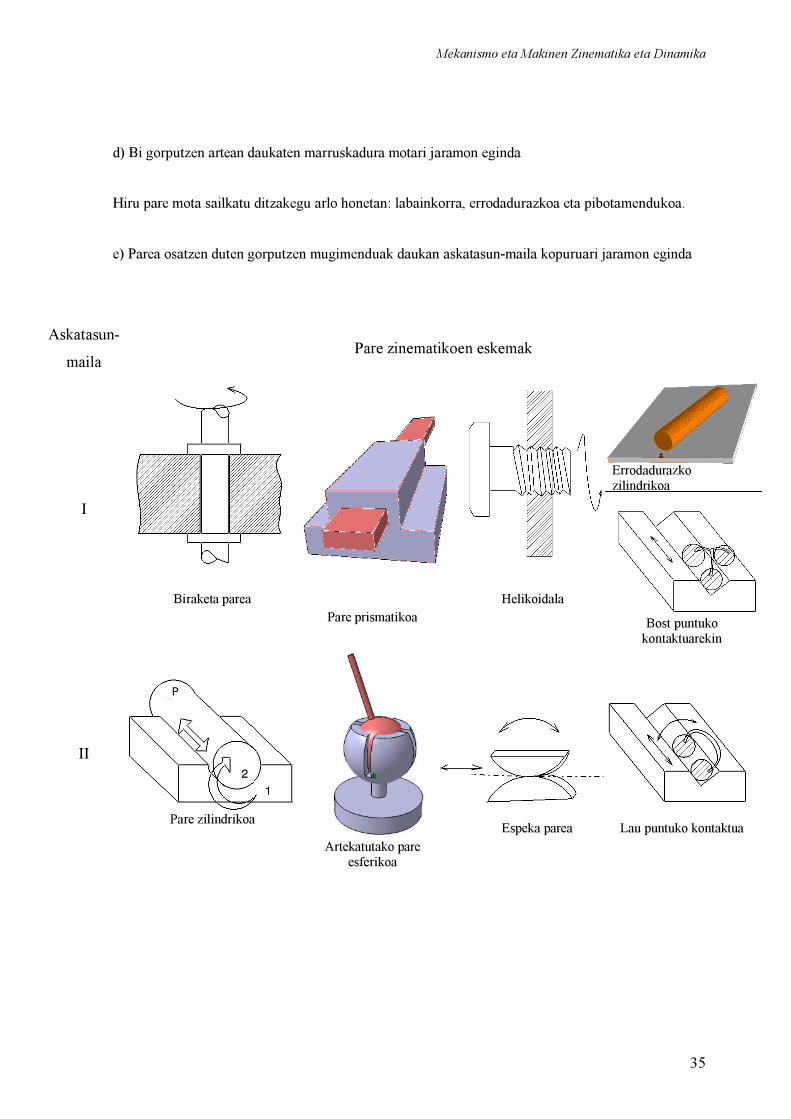
Bi sailkapen horiek lotura motaren arabera egiten dira. Behe edo menpeko parean, piezak gainazal guztian zehar lotuak daude; adibidez, giltzaduran eta errotulan. Goi-pareetan, aldiz, gorputzek zuzen komun bat edo puntu komun bat daukate; adibide gisa, espeka eta beraren haztagailua. b) Bere puntuen artean duten mugimendu erlatiboari jaramon eginda
23. irudia. lehen mailako edo linealak. a) prismatikoa; b) biraketazkoa; d) helikoidala
24. irudia. Bigarren mailakoa edo gainazalekoa. a) pare laua; b) zilindrikoa; d) esferikoa
25. irudia. Pare espaziala edo hirugarren mailakoa
Mekanismo eta Makinen Zinematika eta Dinamika
35
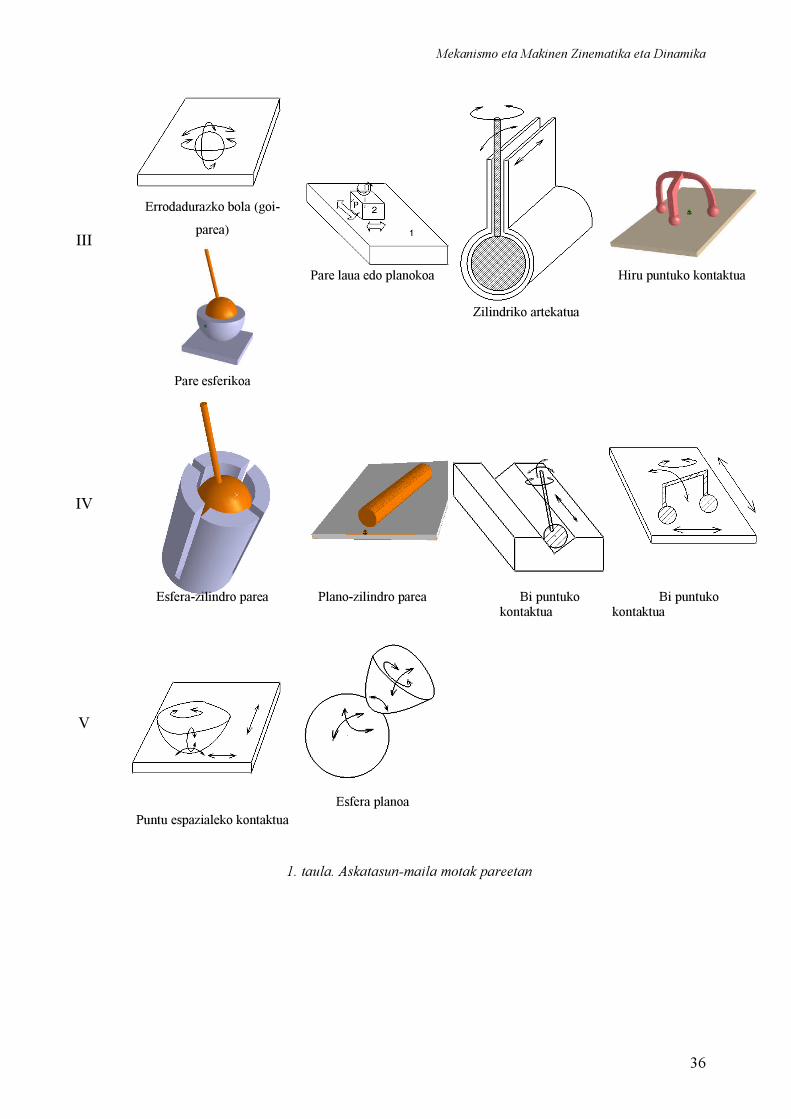
d) Bi gorputzen artean daukaten marruskadura motari jaramon eginda Hiru pare mota sailkatu ditzakegu arlo honetan: labainkorra, errodadurazkoa eta pibotamendukoa. e) Parea osatzen duten gorputzen mugimenduak daukan askatasun-maila kopuruari jaramon eginda
Askatasun-maila Pare zinematikoen eskemak
I
Biraketa parea
Pare prismatikoa
Helikoidala
Errodadurazko zilindrikoa
Bost puntuko kontaktuarekin
II
Pare zilindrikoa
Artekatutako pare esferikoa
Espeka parea
Lau puntuko kontaktua
Mekanismo eta Makinen Zinematika eta Dinamika
36
III
Errodadurazko bola (goi-
parea)
Pare esferikoa
Pare laua edo planokoa
Zilindriko artekatua
Hiru puntuko kontaktua
IV
Esfera-zilindro parea
Plano-zilindro parea
Bi puntuko
kontaktua
Bi puntuko kontaktua
V
Puntu espazialeko kontaktua
Esfera planoa
1. taula. Askatasun-maila motak pareetan

Mekanismo eta Makinen Zinematika eta Dinamika
37
2.2 MEKANISMO LAU BATEN ASKATASUN-MAILAK (GRÜBLER):
Mekanismo batean konfigurazio geometrikoa definitzeko behar den parametro kopuruari askatasun-maila deritzo. N gorputzez, IP askatasun-maila bakarreko pare eta IIP bi askatasun-mailako parez osatutako mekanismo lau batean, Grübler erlazioarekin defini daiteke multzo baten askatasun-maila:
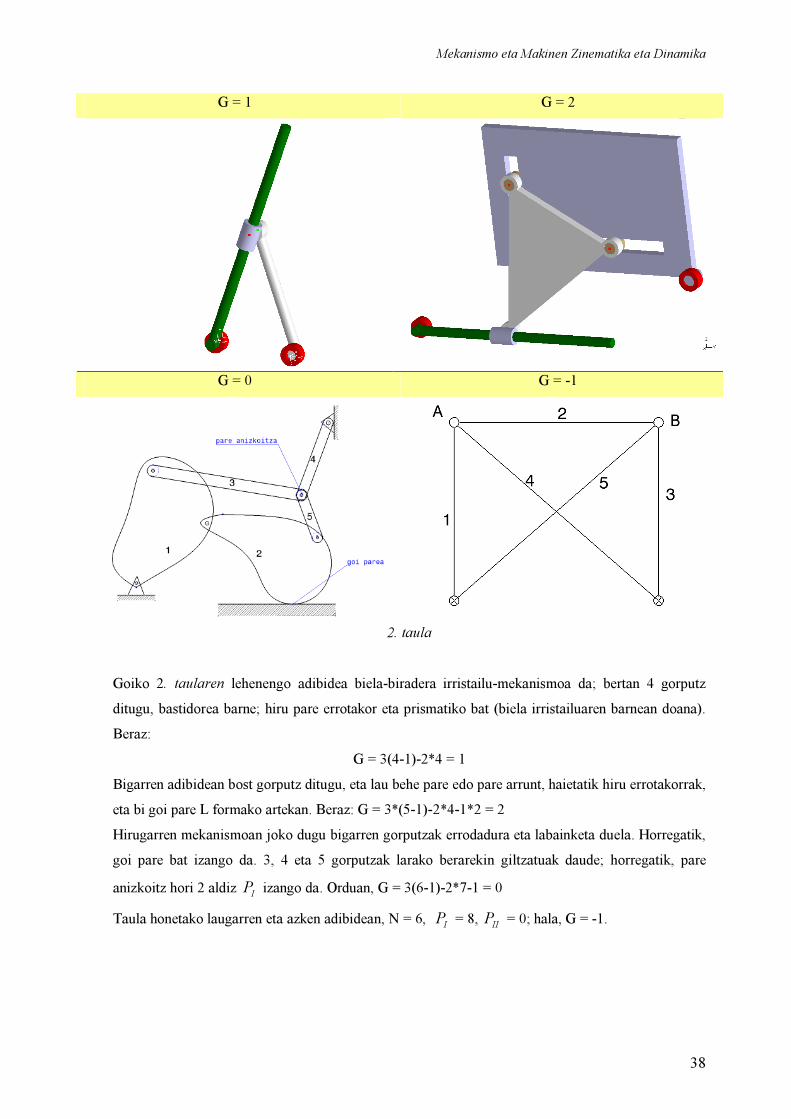
( ) III PPNG −⋅−−= 213 Esan bezala, N mekanismoak dituen gorputz kopuruak osatzen du, bastidorea edo lurra ere kontuan hartuta. IP pare arruntak dira, errotazio pare ( “R” letrarekin erlazionatua), pare prismatiko (“P”) eta pare helikoidalek (“H”) osatzen dutena; eta, azkenik, IIP goi pareak dira, eta espeken pareei (“L”) egiten zaie erreferentzia. Solido zurrun batek eremu lau batean (2D edo bi dimentsio) hiru askatasun-maila ditu: bi translaziokoak, planoaren bi ardatzetan, eta errotazioko bat. Horregatik, Grübler-en formulan mekanismoaren gorputz bakoitza hiruz biderkatzen da. Ondoren, IP pare sinple edo arruntek espazioaren mugimenduan bi murrizketa dituztenez, pare arrunt bakoitza bi aldiz kentzen da, eta IIP goi pareek biraketako askatasun-maila bakarra daukatenez murriztuta, formularen amaieran behin bakarrik kentzen zaio. Horrela lortzen da multzoaren askatasun-maila erresultantea. Askatasun-maila erresultanteak G = 1 ematen badu, sarrerako aldagai bat bakarra izango du, eta mekanismo “desmodromikoa” deitzen zaio. G = 2 ematen badu, ez da “desmodromikoa” izango, batera bi sarrera-mugimendu hornitzea eskatzen duelako. G = 0 bada, mugimendua ezinezkoa da, eta mekanismoak estatikoki zehaztutako egitura osatuko du. G = -1 ematen badu, aldiz, mugimendua ezinezkoa da, eta mekanismoak estatikoki zehaztu gabeko egitura osatuko du, hiperestatikoa deritzona, hau da, soberako elementu bat izango dugu.
Mekanismo eta Makinen Zinematika eta Dinamika
38
G = 1 G = 2
G = 0 G = -1
2. taula Goiko 2. taularen lehenengo adibidea biela-biradera irristailu-mekanismoa da; bertan 4 gorputz ditugu, bastidorea barne; hiru pare errotakor eta prismatiko bat (biela irristailuaren barnean doana). Beraz:
G = 3(4-1)-2*4 = 1 Bigarren adibidean bost gorputz ditugu, eta lau behe pare edo pare arrunt, haietatik hiru errotakorrak, eta bi goi pare L formako artekan. Beraz: G = 3*(5-1)-2*4-1*2 = 2 Hirugarren mekanismoan joko dugu bigarren gorputzak errodadura eta labainketa duela. Horregatik, goi pare bat izango da. 3, 4 eta 5 gorputzak larako berarekin giltzatuak daude; horregatik, pare anizkoitz hori 2 aldiz IP izango da. Orduan, G = 3(6-1)-2*7-1 = 0 Taula honetako laugarren eta azken adibidean, N = 6, IP = 8, IIP = 0; hala, G = -1.
Mekanismo eta Makinen Zinematika eta Dinamika
39
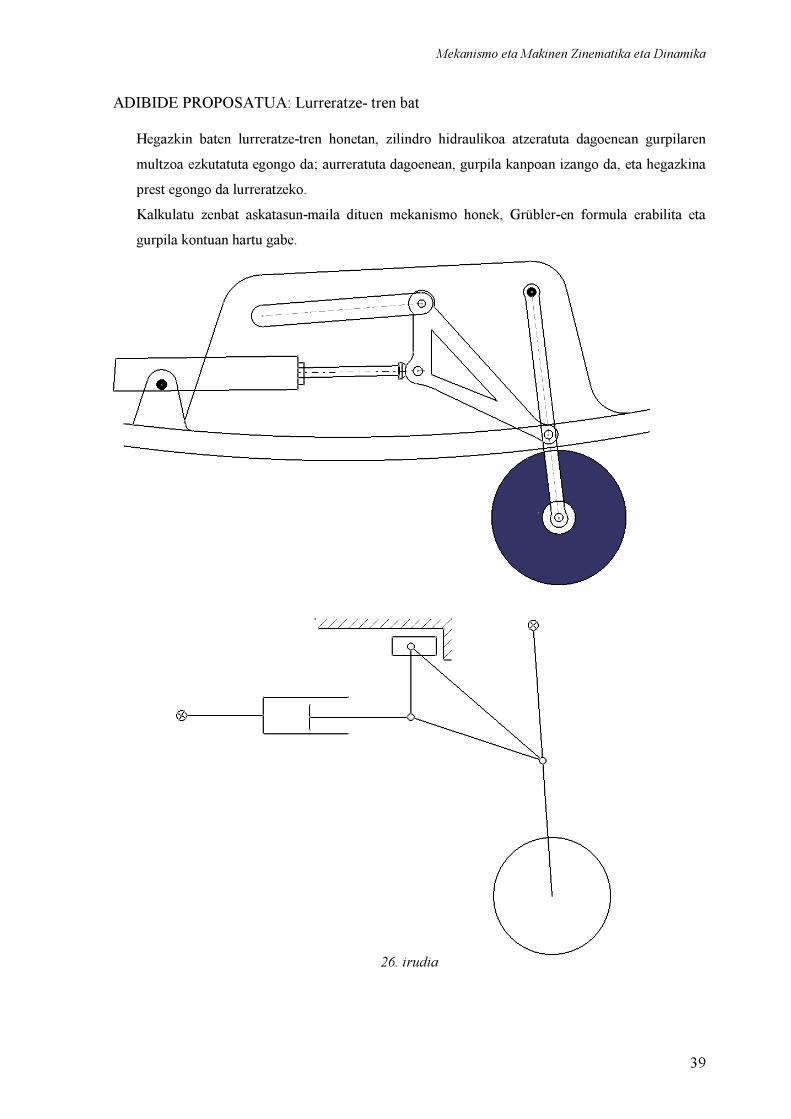
ADIBIDE PROPOSATUA: Lurreratze- tren bat
Hegazkin baten lurreratze-tren honetan, zilindro hidraulikoa atzeratuta dagoenean gurpilaren multzoa ezkutatuta egongo da; aurreratuta dagoenean, gurpila kanpoan izango da, eta hegazkina prest egongo da lurreratzeko. Kalkulatu zenbat askatasun-maila dituen mekanismo honek, Grübler-en formula erabilita eta gurpila kontuan hartu gabe.
26. irudia
Mekanismo eta Makinen Zinematika eta Dinamika
40
2.3 KUTZBACH-EN KRITERIOA Espazioan (3D edo hiru dimentsiotan) gorputz aske bakoitzak 6 askatasun-maila dituenez:
( ) VIVIIIIII PPPPPNG −−−−−−= 234516 IP pareak bost murrizketa edo mugimenduan bost murrizketa dituzten pareak dira…., eta VP -k
murrizketa bakarra izango du.
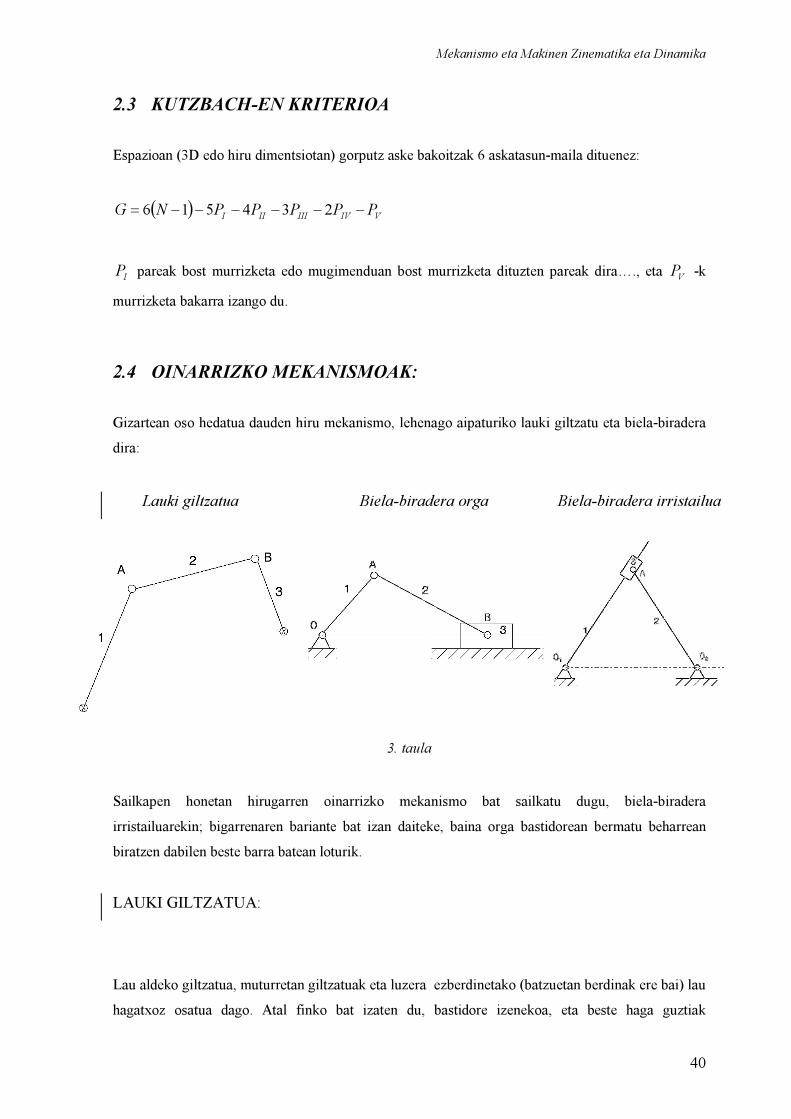
2.4 OINARRIZKO MEKANISMOAK: Gizartean oso hedatua dauden hiru mekanismo, lehenago aipaturiko lauki giltzatu eta biela-biradera dira:
Lauki giltzatua Biela-biradera orga Biela-biradera irristailua
3. taula
Sailkapen honetan hirugarren oinarrizko mekanismo bat sailkatu dugu, biela-biradera irristailuarekin; bigarrenaren bariante bat izan daiteke, baina orga bastidorean bermatu beharrean biratzen dabilen beste barra batean loturik. LAUKI GILTZATUA: Lau aldeko giltzatua, muturretan giltzatuak eta luzera ezberdinetako (batzuetan berdinak ere bai) lau hagatxoz osatua dago. Atal finko bat izaten du, bastidore izenekoa, eta beste haga guztiak
Mekanismo eta Makinen Zinematika eta Dinamika
41
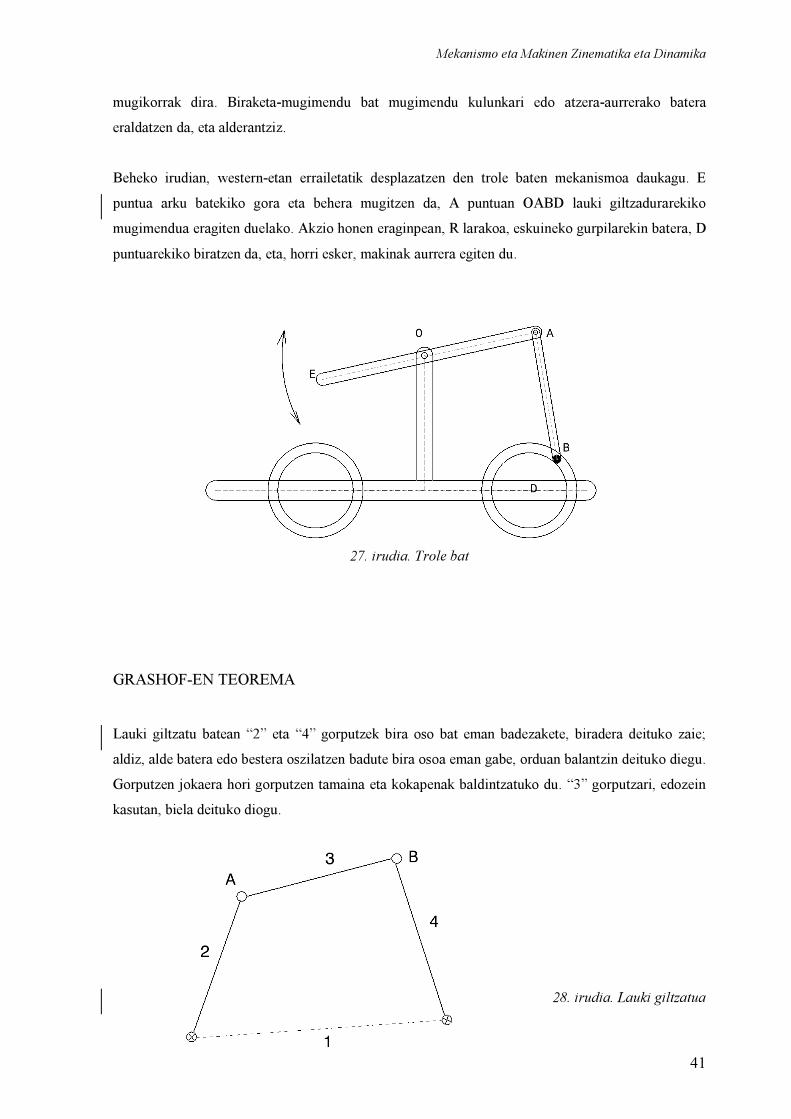
mugikorrak dira. Biraketa-mugimendu bat mugimendu kulunkari edo atzera-aurrerako batera eraldatzen da, eta alderantziz. Beheko irudian, western-etan errailetatik desplazatzen den trole baten mekanismoa daukagu. E puntua arku batekiko gora eta behera mugitzen da, A puntuan OABD lauki giltzadurarekiko mugimendua eragiten duelako. Akzio honen eraginpean, R larakoa, eskuineko gurpilarekin batera, D puntuarekiko biratzen da, eta, horri esker, makinak aurrera egiten du.
27. irudia. Trole bat
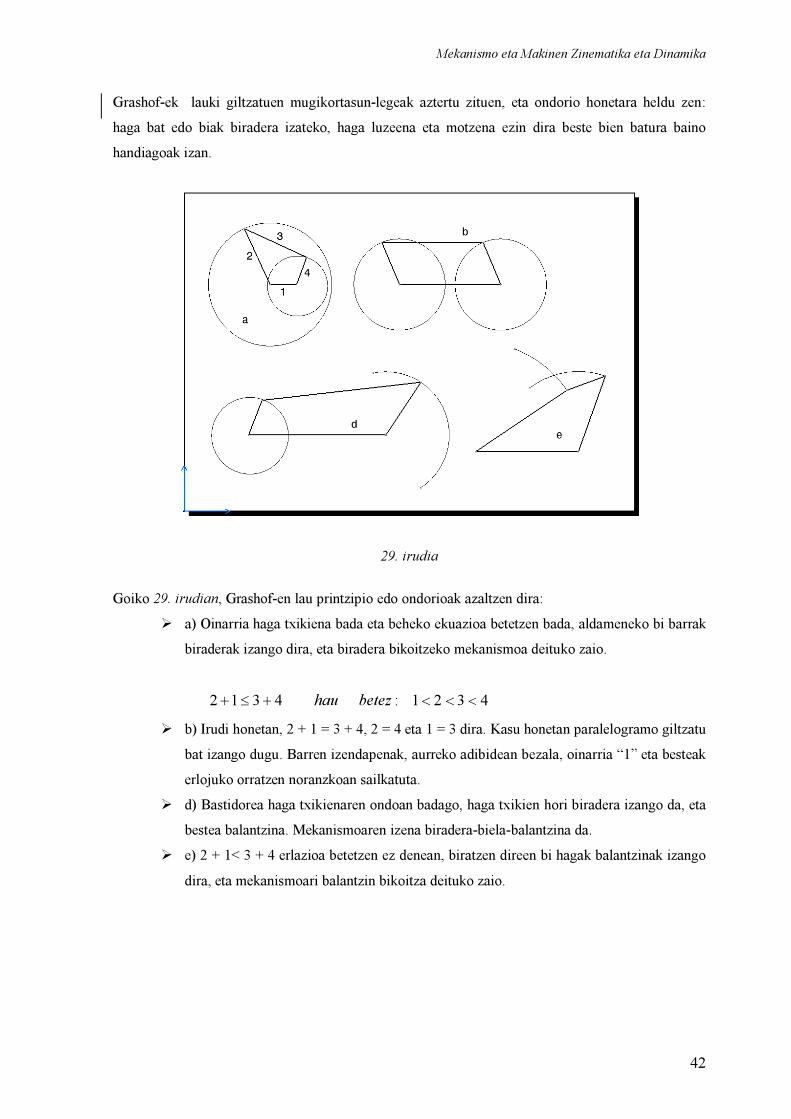
GRASHOF-EN TEOREMA Lauki giltzatu batean “2” eta “4” gorputzek bira oso bat eman badezakete, biradera deituko zaie; aldiz, alde batera edo bestera oszilatzen badute bira osoa eman gabe, orduan balantzin deituko diegu. Gorputzen jokaera hori gorputzen tamaina eta kokapenak baldintzatuko du. “3” gorputzari, edozein kasutan, biela deituko diogu.
28. irudia. Lauki giltzatua
Mekanismo eta Makinen Zinematika eta Dinamika
42
Grashof-ek lauki giltzatuen mugikortasun-legeak aztertu zituen, eta ondorio honetara heldu zen: haga bat edo biak biradera izateko, haga luzeena eta motzena ezin dira beste bien batura baino handiagoak izan.
29. irudia Goiko 29. irudian, Grashof-en lau printzipio edo ondorioak azaltzen dira: � a) Oinarria haga txikiena bada eta beheko ekuazioa betetzen bada, aldameneko bi barrak
biraderak izango dira, eta biradera bikoitzeko mekanismoa deituko zaio. 4321:4312 <<<+≤+ betezhau � b) Irudi honetan, 2 + 1 = 3 + 4, 2 = 4 eta 1 = 3 dira. Kasu honetan paralelogramo giltzatu
bat izango dugu. Barren izendapenak, aurreko adibidean bezala, oinarria “1” eta besteak erlojuko orratzen noranzkoan sailkatuta. � d) Bastidorea haga txikienaren ondoan badago, haga txikien hori biradera izango da, eta
bestea balantzina. Mekanismoaren izena biradera-biela-balantzina da. � e) 2 + 1< 3 + 4 erlazioa betetzen ez denean, biratzen direen bi hagak balantzinak izango
dira, eta mekanismoari balantzin bikoitza deituko zaio.
Mekanismo eta Makinen Zinematika eta Dinamika
43
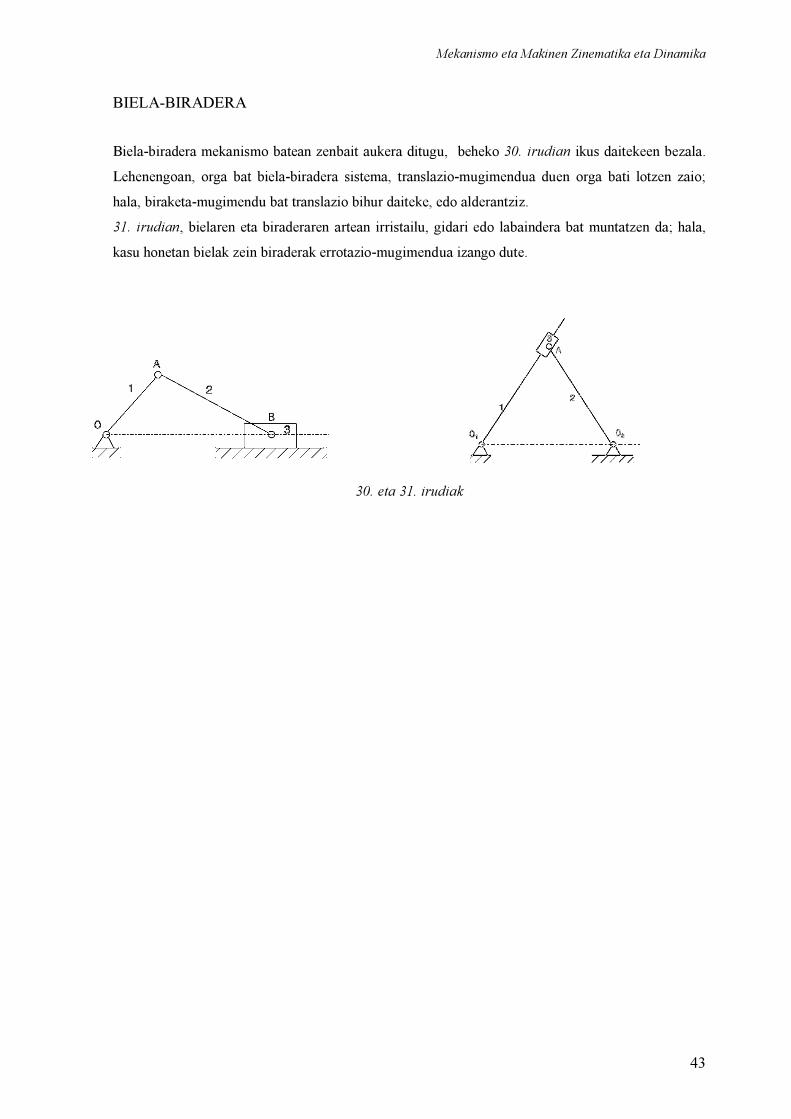
BIELA-BIRADERA Biela-biradera mekanismo batean zenbait aukera ditugu, beheko 30. irudian ikus daitekeen bezala. Lehenengoan, orga bat biela-biradera sistema, translazio-mugimendua duen orga bati lotzen zaio; hala, biraketa-mugimendu bat translazio bihur daiteke, edo alderantziz. 31. irudian, bielaren eta biraderaren artean irristailu, gidari edo labaindera bat muntatzen da; hala, kasu honetan bielak zein biraderak errotazio-mugimendua izango dute.
30. eta 31. irudiak
Mekanismo eta Makinen Zinematika eta Dinamika
44
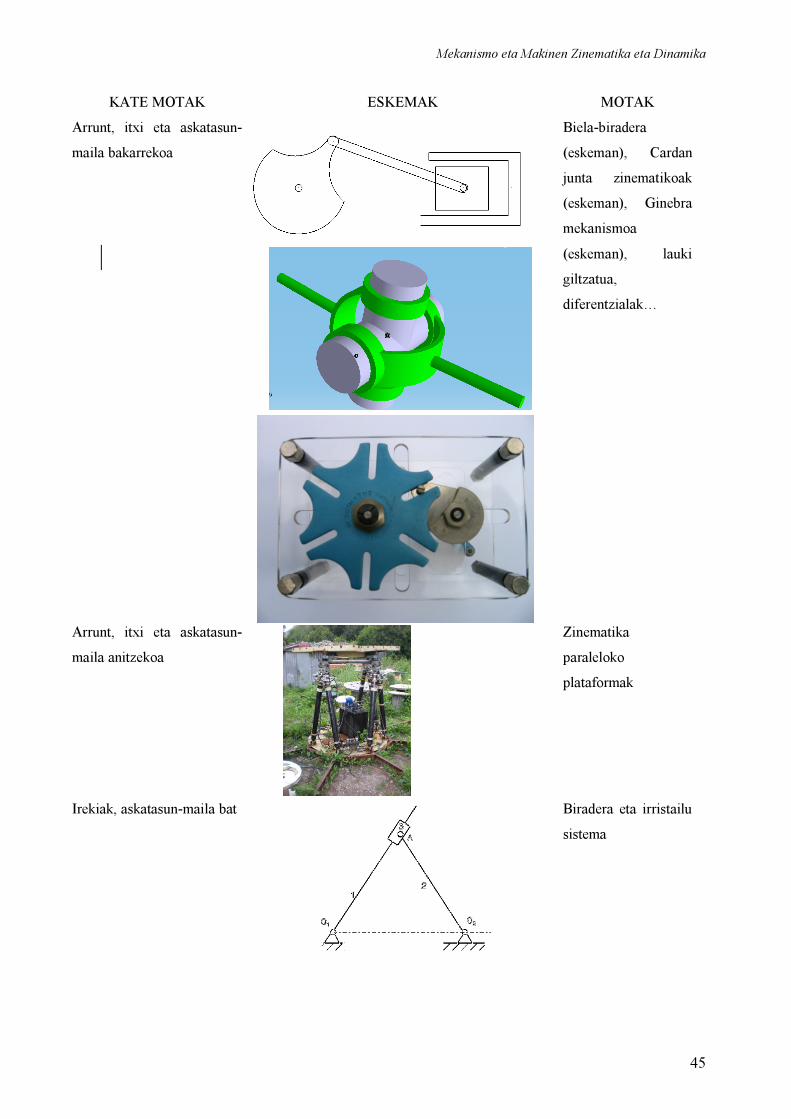
2.5 MEKANISMOEN SAILKAPENAK: GORPUTZ ANITZEKO SISTEMAK Urtetan zehar sistema mekanikoetan aztertu diren multzoetan “mekanismo” hitza mugimendua aztertu denean erabili izan da, eta “makina” terminoa dinamika aztertzean. Baina arrazoi batzuk badira nomenklatura hau anbiguo bihurtu dutenak, batzuetan hitz egin ohi baita “mekanismoen dinamika” eta “makinen zinematikari” buruz ere. Alde batetik, mekanismoen ikerketa zinematikoan, transmititutako indarrei erreferentzia egiten zaie batzuetan, hala nola “abantaila mekanikoa” kontzeptuen kasuan. Kasu honetan, irteeran lortutako akzioaren eta sarreran elikatutako akzioaren erlaziotik definitua joango da, mekanismo baten konfigurazio zehatz batean efizientzia neurtzeko asmotan. Blokeo-kokapenen ikerkuntzan transmititutako akzioei ere jaramon egiten zaie. Dinamika zuzenaren kasuan, zehaztu gabeko posizioak ere aztertzen dira. Arrazoi horiengatik, eta mekanismo eta makinen kontzeptuak bateratzeko, azken urteotan “gorputz anitzeko sistema” terminoa edo “multibody” sistemak erabili ohi dira. Termino horien erabilera zabala esnobismo-kutsu baten ondorio edo “muinbakar atzerapen” baten fruitu izan daiteke. Mekanismo edo makina bat, pare zinematikoen bidez lotutako gorputz anitzen multzo gisa ulertzen dugun momentuan, analizatu nahi dugunari jaramon egin gabe. Mekanismo, makina edo gorputz anitzeko sistema bat zenbait modutara sailkatu daiteke. Beheko 4. taulan, zenbait sailetan banatuko ditugu, forma eskematiko batean, sistemaren konplexutasuna, askatasun-maila eta sistema irekia edo itxia den kontuan hartuta.
Mekanismo eta Makinen Zinematika eta Dinamika
45
KATE MOTAK ESKEMAK MOTAK Arrunt, itxi eta askatasun-maila bakarrekoa
Biela-biradera (eskeman), Cardan junta zinematikoak (eskeman), Ginebra mekanismoa (eskeman), lauki giltzatua, diferentzialak…
Arrunt, itxi eta askatasun-maila anitzekoa
Zinematika paraleloko plataformak
Irekiak, askatasun-maila bat
Biradera eta irristailu sistema
Mekanismo eta Makinen Zinematika eta Dinamika
46
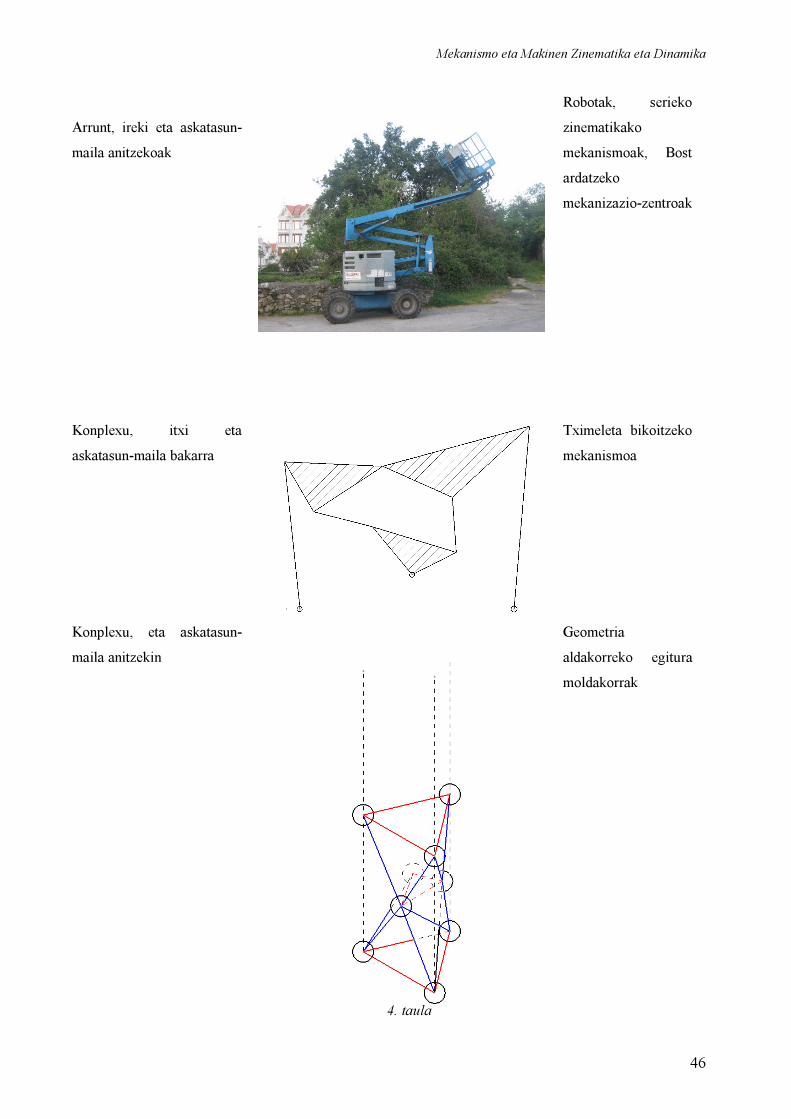
Arrunt, ireki eta askatasun-maila anitzekoak
Robotak, serieko zinematikako mekanismoak, Bost ardatzeko mekanizazio-zentroak
Konplexu, itxi eta askatasun-maila bakarra
Tximeleta bikoitzeko mekanismoa
Konplexu, eta askatasun-maila anitzekin
Geometria aldakorreko egitura moldakorrak
4. taula
Mekanismo eta Makinen Zinematika eta Dinamika
47
3 OHIKO MEKANISMO ETA MEKANISMO BEREZIEN AZALPENA
Historian zehar, Watt-en lurrunezko makinaz gainera, beste mekanismo ugari asmatu edo sortuak izan dira, eta asmakizun edo ikerkuntzaren emaitzek aurreko ikertzaileetan dutenez bermea, sarritan historia egin dituzten izenek beste izenen aipamenak beharko dituzte. Dena dela, atal honetan ohiko mekanismo eta mekanismo berezien azalpenak jorratuko dira. Gorputzen arteko lotura-sistemak, ibilbide bereziak jarraituko dituzten mekanismoak, mekanismo kuriosoak, … • Lerro zuzeneko mekanismoak
• Watt mekanismoa • Robert eta Chevyshev
• Ibilbide erdizuzenak • Akoplamendu-kurba bidezko higidura paraleloa • Mugimendu paraleloaren aplikazio praktikoa • Pantografoa • Itzulera azkarreko mekanismoa • Giltzadura orokor edo unibertsalak
• Oldman • Cardan
• Genevako gurpila • Mekanismo eszentrikoak (Espekak) • Engranajeak • Geometria aldakorreko egitura moldakorrak • Engranaje diferentzialak. • Askatasun-maila anitzeko makinak • Alderantzizko zinematika • Zinematika paraleloa (plataformak)
Mekanismo eta Makinen Zinematika eta Dinamika
48
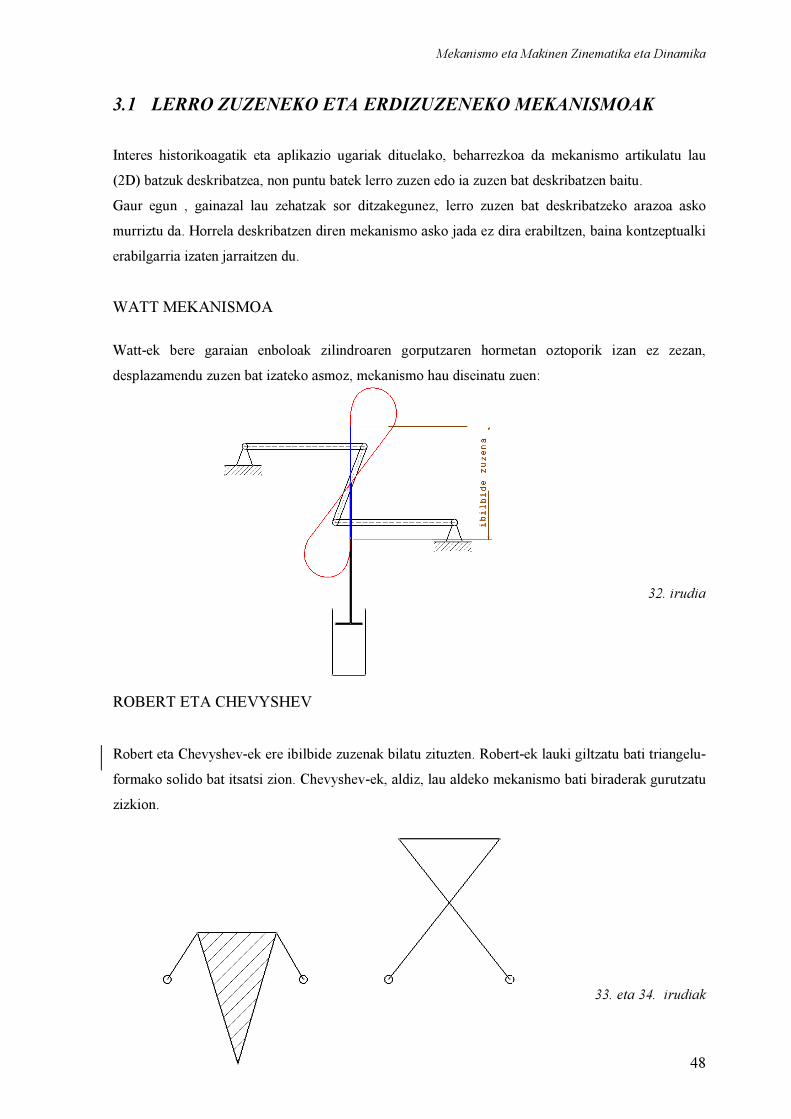
3.1 LERRO ZUZENEKO ETA ERDIZUZENEKO MEKANISMOAK Interes historikoagatik eta aplikazio ugariak dituelako, beharrezkoa da mekanismo artikulatu lau (2D) batzuk deskribatzea, non puntu batek lerro zuzen edo ia zuzen bat deskribatzen baitu. Gaur egun , gainazal lau zehatzak sor ditzakegunez, lerro zuzen bat deskribatzeko arazoa asko murriztu da. Horrela deskribatzen diren mekanismo asko jada ez dira erabiltzen, baina kontzeptualki erabilgarria izaten jarraitzen du. WATT MEKANISMOA Watt-ek bere garaian enboloak zilindroaren gorputzaren hormetan oztoporik izan ez zezan, desplazamendu zuzen bat izateko asmoz, mekanismo hau diseinatu zuen:
32. irudia ROBERT ETA CHEVYSHEV Robert eta Chevyshev-ek ere ibilbide zuzenak bilatu zituzten. Robert-ek lauki giltzatu bati triangelu-formako solido bat itsatsi zion. Chevyshev-ek, aldiz, lau aldeko mekanismo bati biraderak gurutzatu zizkion.
33. eta 34. irudiak
Mekanismo eta Makinen Zinematika eta Dinamika
49
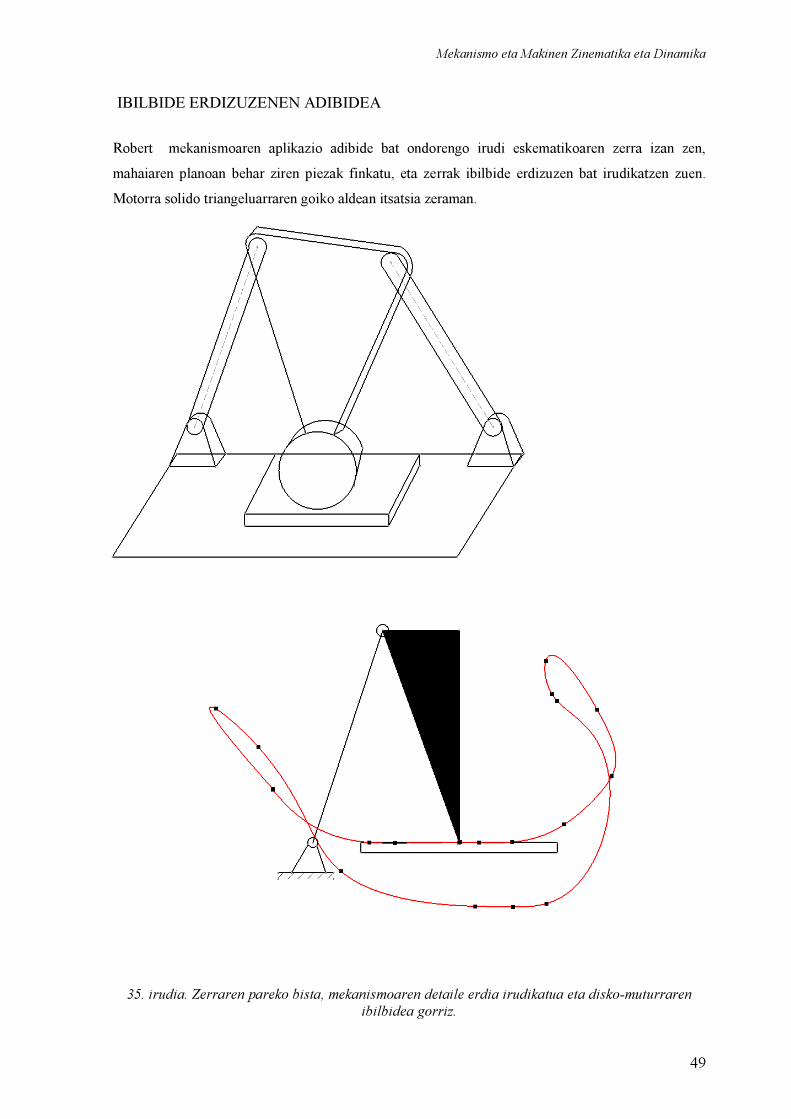
IBILBIDE ERDIZUZENEN ADIBIDEA Robert mekanismoaren aplikazio adibide bat ondorengo irudi eskematikoaren zerra izan zen, mahaiaren planoan behar ziren piezak finkatu, eta zerrak ibilbide erdizuzen bat irudikatzen zuen. Motorra solido triangeluarraren goiko aldean itsatsia zeraman. 35. irudia. Zerraren pareko bista, mekanismoaren detaile erdia irudikatua eta disko-muturraren ibilbidea gorriz.
Mekanismo eta Makinen Zinematika eta Dinamika
50
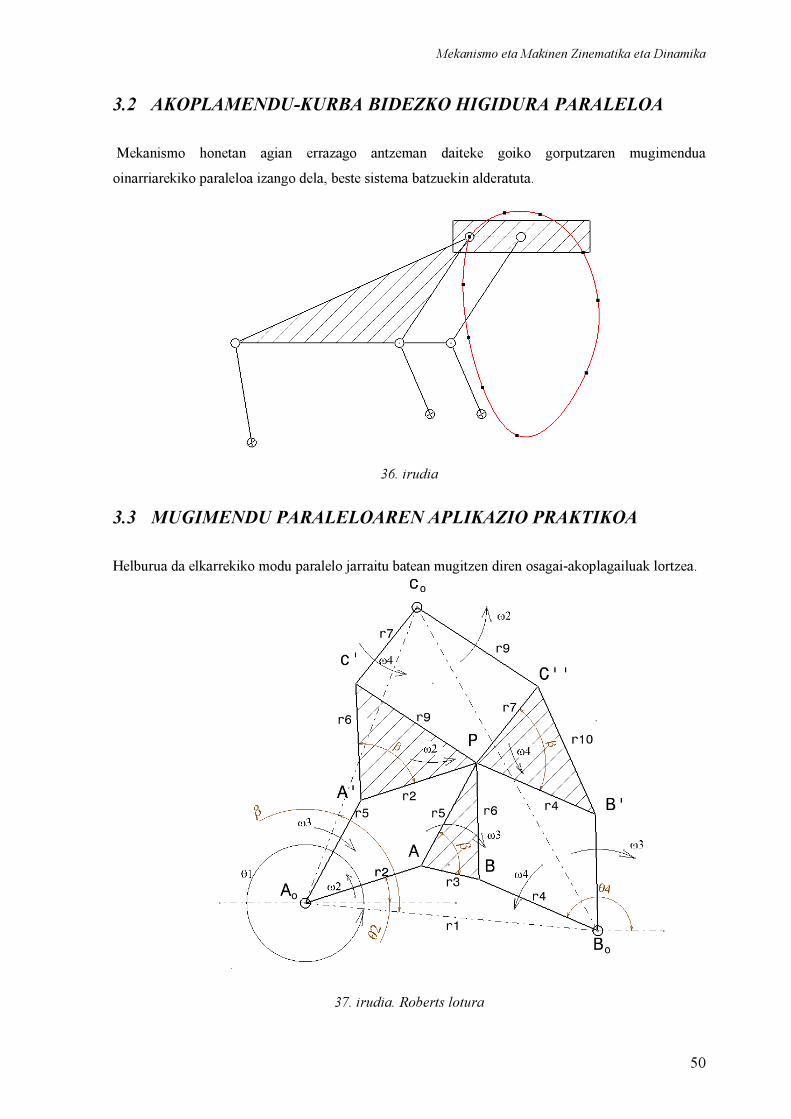
3.2 AKOPLAMENDU-KURBA BIDEZKO HIGIDURA PARALELOA Mekanismo honetan agian errazago antzeman daiteke goiko gorputzaren mugimendua oinarriarekiko paraleloa izango dela, beste sistema batzuekin alderatuta.
36. irudia
3.3 MUGIMENDU PARALELOAREN APLIKAZIO PRAKTIKOA Helburua da elkarrekiko modu paralelo jarraitu batean mugitzen diren osagai-akoplagailuak lortzea.
37. irudia. Roberts lotura
Mekanismo eta Makinen Zinematika eta Dinamika
51
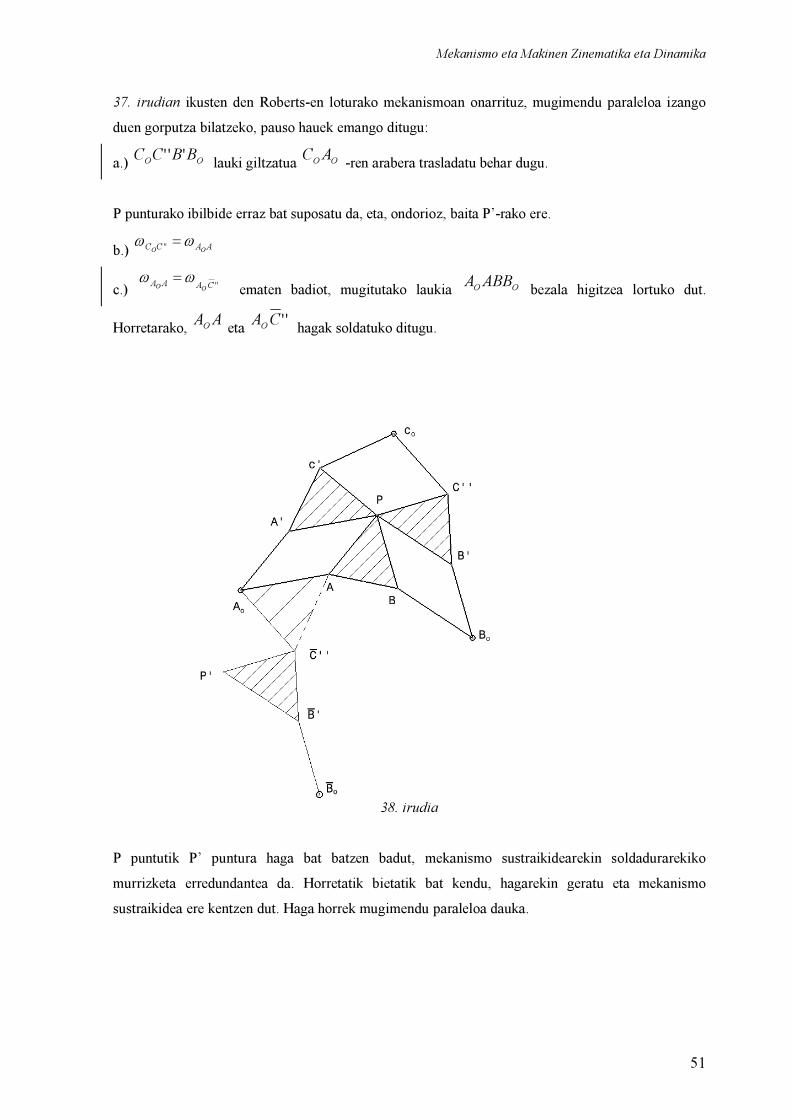
37. irudian ikusten den Roberts-en loturako mekanismoan onarrituz, mugimendu paraleloa izango duen gorputza bilatzeko, pauso hauek emango ditugu: a.) OO BBCC ''' lauki giltzatua OOAC -ren arabera trasladatu behar dugu. P punturako ibilbide erraz bat suposatu da, eta, ondorioz, baita P’-rako ere. b.) AACC OO
ωω ='' c.) ''CAAA OO
ωω = ematen badiot, mugitutako laukia OOABBA bezala higitzea lortuko dut. Horretarako, AAO eta ''CAO hagak soldatuko ditugu.
38. irudia P puntutik P’ puntura haga bat batzen badut, mekanismo sustraikidearekin soldadurarekiko murrizketa erredundantea da. Horretatik bietatik bat kendu, hagarekin geratu eta mekanismo sustraikidea ere kentzen dut. Haga horrek mugimendu paraleloa dauka.
Mekanismo eta Makinen Zinematika eta Dinamika
52
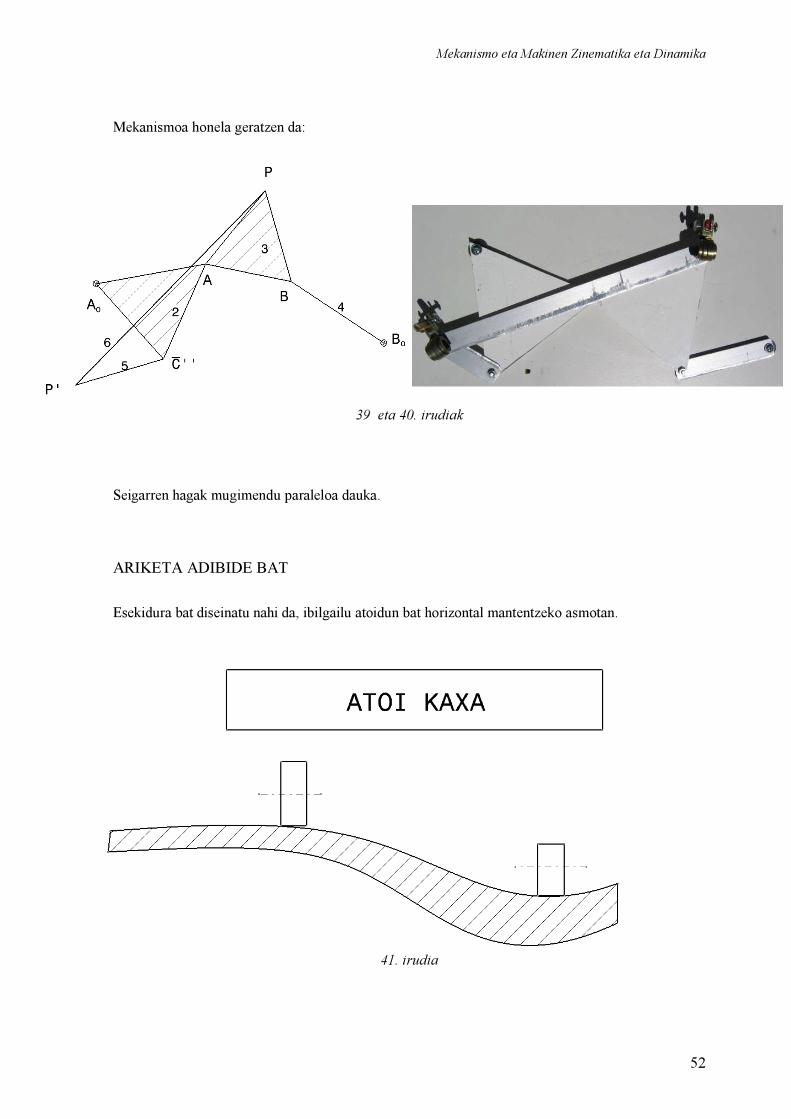
Mekanismoa honela geratzen da:
39 eta 40. irudiak Seigarren hagak mugimendu paraleloa dauka. ARIKETA ADIBIDE BAT Esekidura bat diseinatu nahi da, ibilgailu atoidun bat horizontal mantentzeko asmotan.
41. irudia
Mekanismo eta Makinen Zinematika eta Dinamika
53
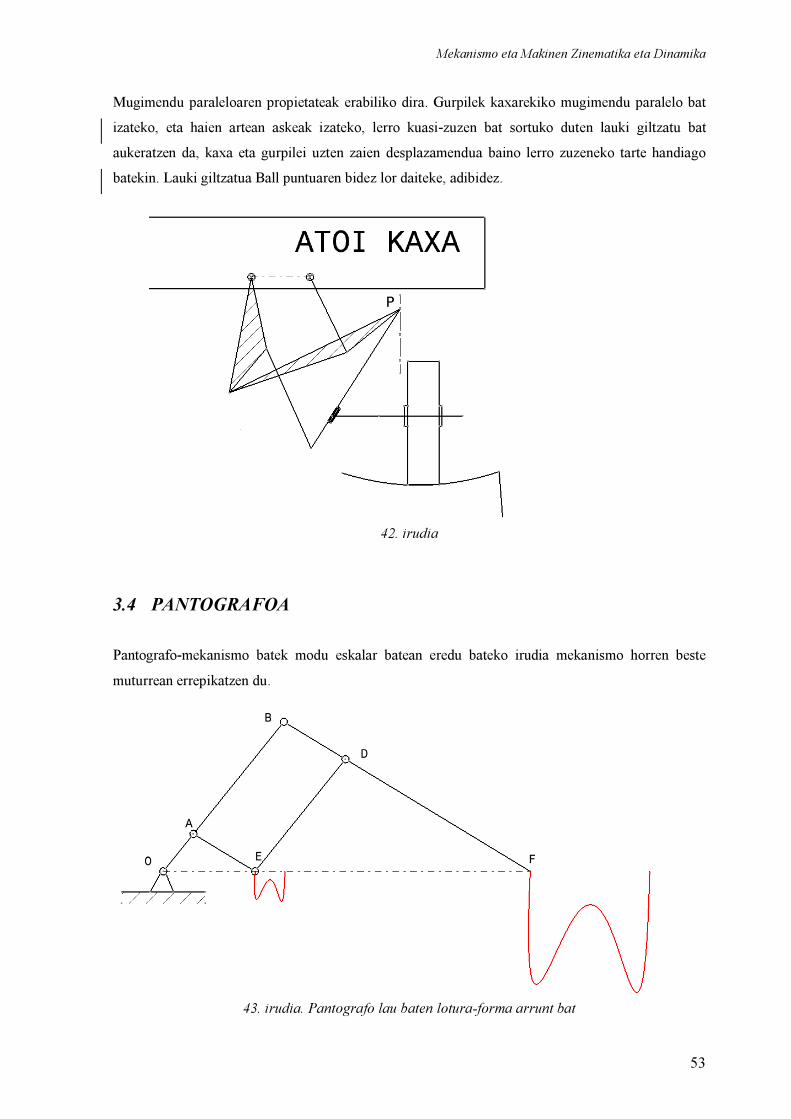
Mugimendu paraleloaren propietateak erabiliko dira. Gurpilek kaxarekiko mugimendu paralelo bat izateko, eta haien artean askeak izateko, lerro kuasi-zuzen bat sortuko duten lauki giltzatu bat aukeratzen da, kaxa eta gurpilei uzten zaien desplazamendua baino lerro zuzeneko tarte handiago batekin. Lauki giltzatua Ball puntuaren bidez lor daiteke, adibidez.
42. irudia
3.4 PANTOGRAFOA Pantografo-mekanismo batek modu eskalar batean eredu bateko irudia mekanismo horren beste muturrean errepikatzen du.
43. irudia. Pantografo lau baten lotura-forma arrunt bat
Mekanismo eta Makinen Zinematika eta Dinamika
54
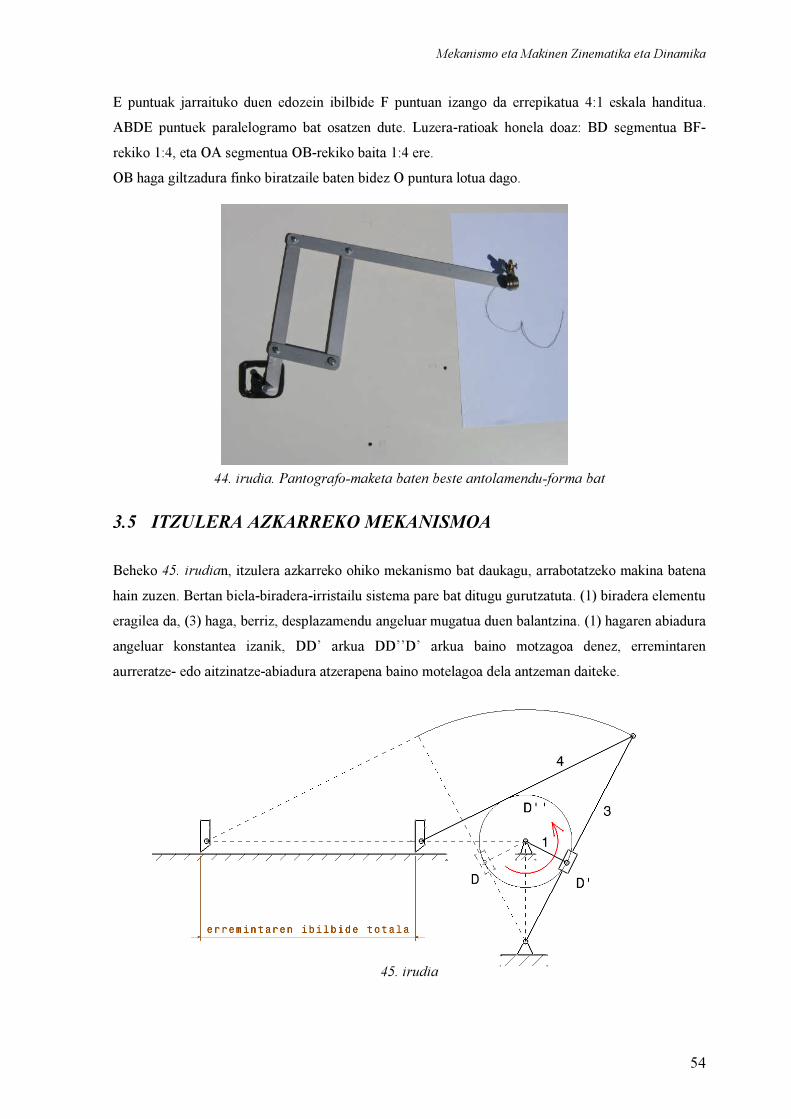
E puntuak jarraituko duen edozein ibilbide F puntuan izango da errepikatua 4:1 eskala handitua. ABDE puntuek paralelogramo bat osatzen dute. Luzera-ratioak honela doaz: BD segmentua BF-rekiko 1:4, eta OA segmentua OB-rekiko baita 1:4 ere. OB haga giltzadura finko biratzaile baten bidez O puntura lotua dago.
44. irudia. Pantografo-maketa baten beste antolamendu-forma bat
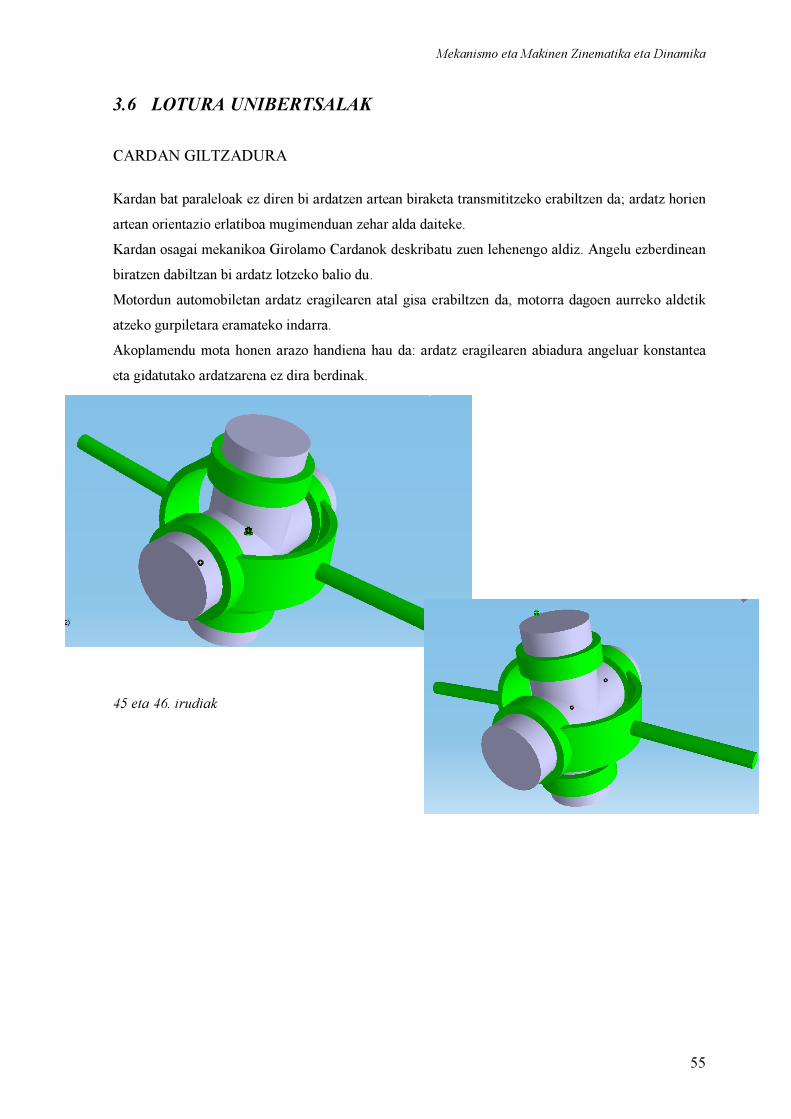
3.5 ITZULERA AZKARREKO MEKANISMOA Beheko 45. irudian, itzulera azkarreko ohiko mekanismo bat daukagu, arrabotatzeko makina batena hain zuzen. Bertan biela-biradera-irristailu sistema pare bat ditugu gurutzatuta. (1) biradera elementu eragilea da, (3) haga, berriz, desplazamendu angeluar mugatua duen balantzina. (1) hagaren abiadura angeluar konstantea izanik, DD’ arkua DD’’D’ arkua baino motzagoa denez, erremintaren aurreratze- edo aitzinatze-abiadura atzerapena baino motelagoa dela antzeman daiteke.
45. irudia
Mekanismo eta Makinen Zinematika eta Dinamika
55
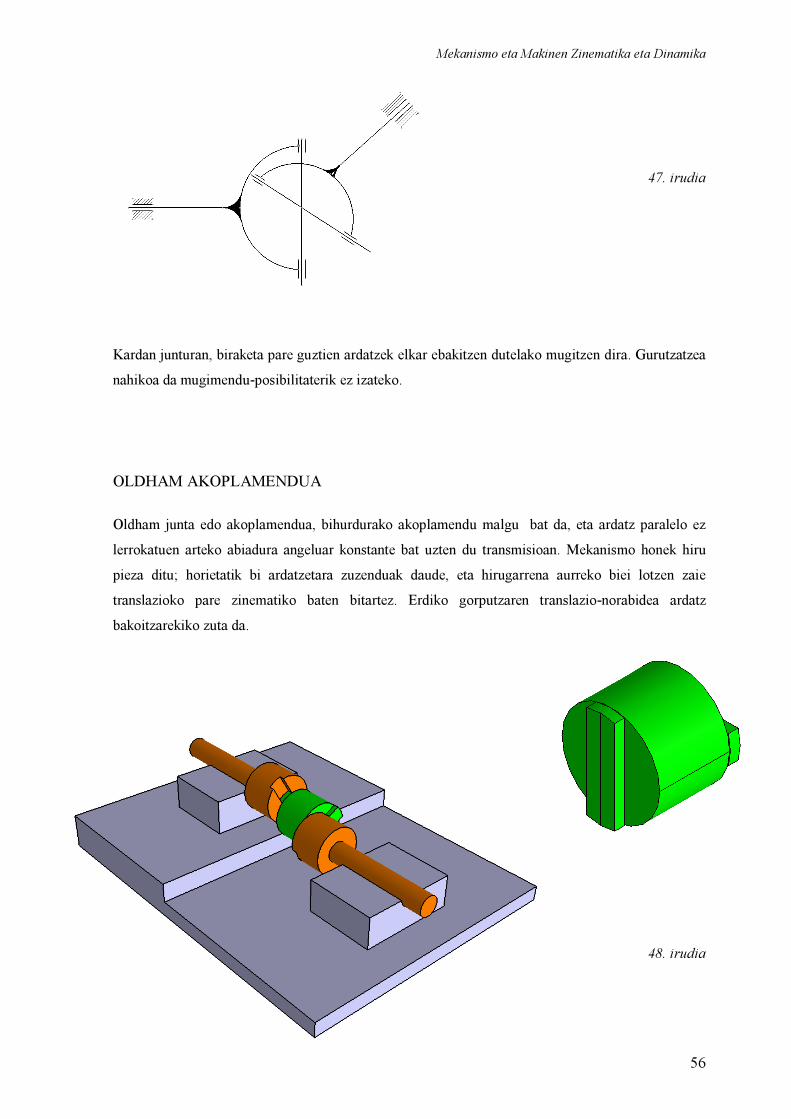
3.6 LOTURA UNIBERTSALAK CARDAN GILTZADURA Kardan bat paraleloak ez diren bi ardatzen artean biraketa transmititzeko erabiltzen da; ardatz horien artean orientazio erlatiboa mugimenduan zehar alda daiteke. Kardan osagai mekanikoa Girolamo Cardanok deskribatu zuen lehenengo aldiz. Angelu ezberdinean biratzen dabiltzan bi ardatz lotzeko balio du. Motordun automobiletan ardatz eragilearen atal gisa erabiltzen da, motorra dagoen aurreko aldetik atzeko gurpiletara eramateko indarra. Akoplamendu mota honen arazo handiena hau da: ardatz eragilearen abiadura angeluar konstantea eta gidatutako ardatzarena ez dira berdinak. 45 eta 46. irudiak
Mekanismo eta Makinen Zinematika eta Dinamika
56
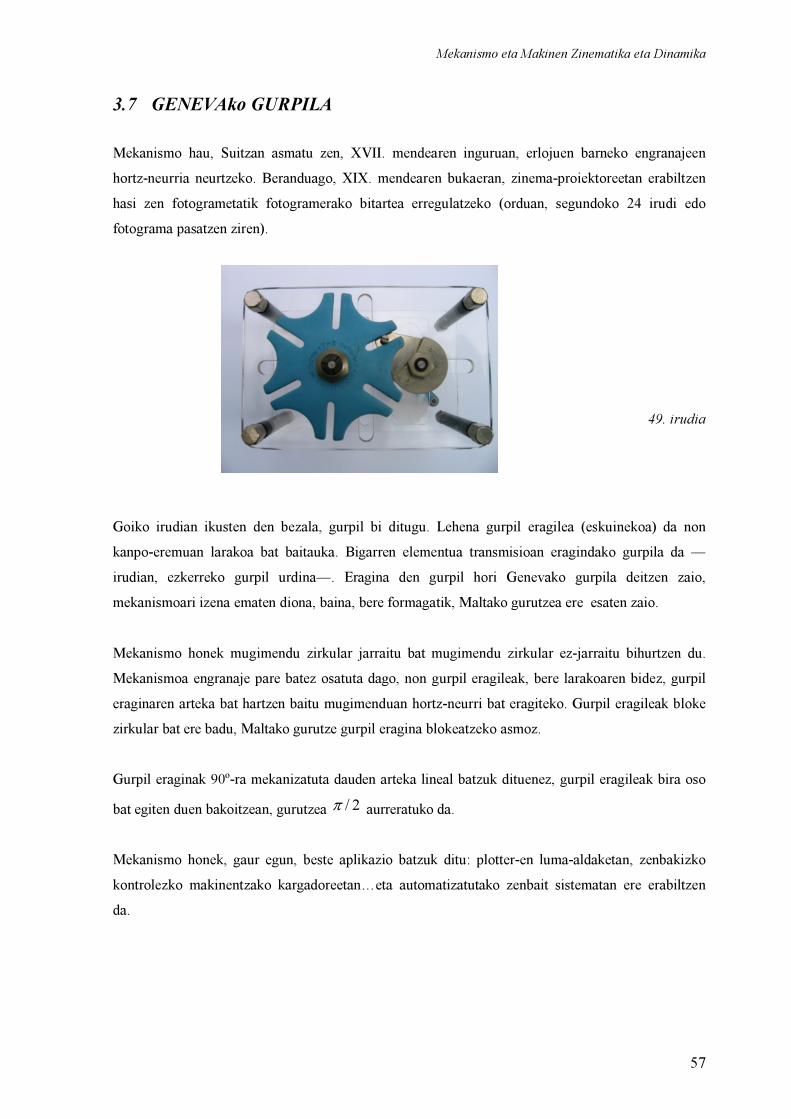
47. irudia Kardan junturan, biraketa pare guztien ardatzek elkar ebakitzen dutelako mugitzen dira. Gurutzatzea nahikoa da mugimendu-posibilitaterik ez izateko. OLDHAM AKOPLAMENDUA Oldham junta edo akoplamendua, bihurdurako akoplamendu malgu bat da, eta ardatz paralelo ez lerrokatuen arteko abiadura angeluar konstante bat uzten du transmisioan. Mekanismo honek hiru pieza ditu; horietatik bi ardatzetara zuzenduak daude, eta hirugarrena aurreko biei lotzen zaie translazioko pare zinematiko baten bitartez. Erdiko gorputzaren translazio-norabidea ardatz bakoitzarekiko zuta da.
48. irudia
Mekanismo eta Makinen Zinematika eta Dinamika
57
3.7 GENEVAko GURPILA Mekanismo hau, Suitzan asmatu zen, XVII. mendearen inguruan, erlojuen barneko engranajeen hortz-neurria neurtzeko. Beranduago, XIX. mendearen bukaeran, zinema-proiektoreetan erabiltzen hasi zen fotogrametatik fotogramerako bitartea erregulatzeko (orduan, segundoko 24 irudi edo fotograma pasatzen ziren).
49. irudia
Goiko irudian ikusten den bezala, gurpil bi ditugu. Lehena gurpil eragilea (eskuinekoa) da non kanpo-eremuan larakoa bat baitauka. Bigarren elementua transmisioan eragindako gurpila da —irudian, ezkerreko gurpil urdina—. Eragina den gurpil hori Genevako gurpila deitzen zaio, mekanismoari izena ematen diona, baina, bere formagatik, Maltako gurutzea ere esaten zaio. Mekanismo honek mugimendu zirkular jarraitu bat mugimendu zirkular ez-jarraitu bihurtzen du. Mekanismoa engranaje pare batez osatuta dago, non gurpil eragileak, bere larakoaren bidez, gurpil eraginaren arteka bat hartzen baitu mugimenduan hortz-neurri bat eragiteko. Gurpil eragileak bloke zirkular bat ere badu, Maltako gurutze gurpil eragina blokeatzeko asmoz. Gurpil eraginak 90º-ra mekanizatuta dauden arteka lineal batzuk dituenez, gurpil eragileak bira oso bat egiten duen bakoitzean, gurutzea 2/π aurreratuko da. Mekanismo honek, gaur egun, beste aplikazio batzuk ditu: plotter-en luma-aldaketan, zenbakizko kontrolezko makinentzako kargadoreetan…eta automatizatutako zenbait sistematan ere erabiltzen da.
Mekanismo eta Makinen Zinematika eta Dinamika
58
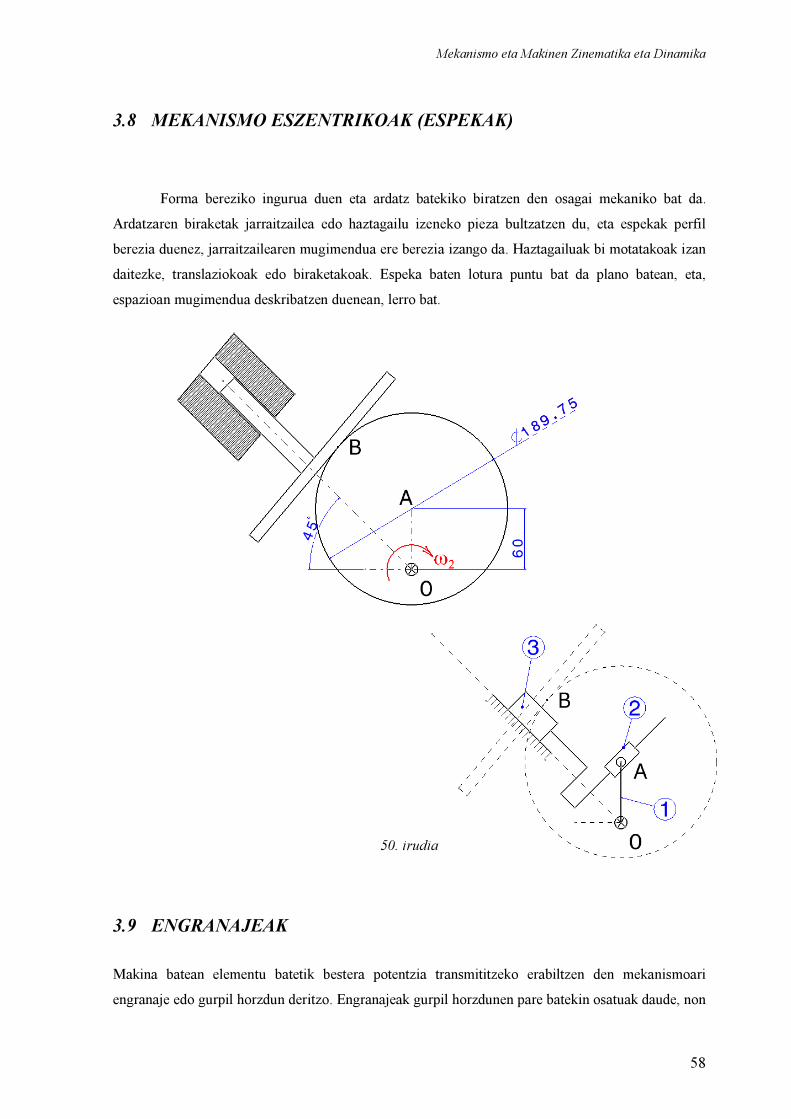
3.8 MEKANISMO ESZENTRIKOAK (ESPEKAK)
Forma bereziko ingurua duen eta ardatz batekiko biratzen den osagai mekaniko bat da. Ardatzaren biraketak jarraitzailea edo haztagailu izeneko pieza bultzatzen du, eta espekak perfil berezia duenez, jarraitzailearen mugimendua ere berezia izango da. Haztagailuak bi motatakoak izan daitezke, translaziokoak edo biraketakoak. Espeka baten lotura puntu bat da plano batean, eta, espazioan mugimendua deskribatzen duenean, lerro bat.
50. irudia
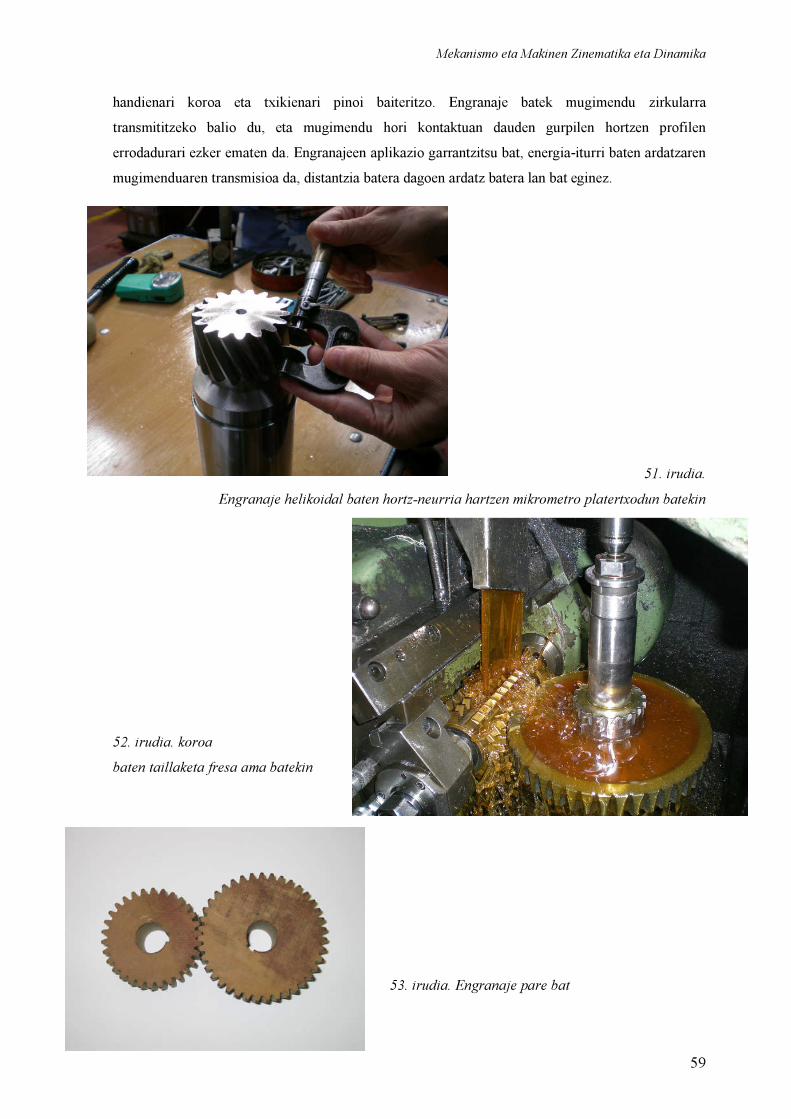
3.9 ENGRANAJEAK Makina batean elementu batetik bestera potentzia transmititzeko erabiltzen den mekanismoari engranaje edo gurpil horzdun deritzo. Engranajeak gurpil horzdunen pare batekin osatuak daude, non
Mekanismo eta Makinen Zinematika eta Dinamika
59
handienari koroa eta txikienari pinoi baiteritzo. Engranaje batek mugimendu zirkularra transmititzeko balio du, eta mugimendu hori kontaktuan dauden gurpilen hortzen profilen errodadurari ezker ematen da. Engranajeen aplikazio garrantzitsu bat, energia-iturri baten ardatzaren mugimenduaren transmisioa da, distantzia batera dagoen ardatz batera lan bat eginez.
51. irudia.
Engranaje helikoidal baten hortz-neurria hartzen mikrometro platertxodun batekin 52. irudia. koroa baten taillaketa fresa ama batekin
53. irudia. Engranaje pare bat
Mekanismo eta Makinen Zinematika eta Dinamika
60
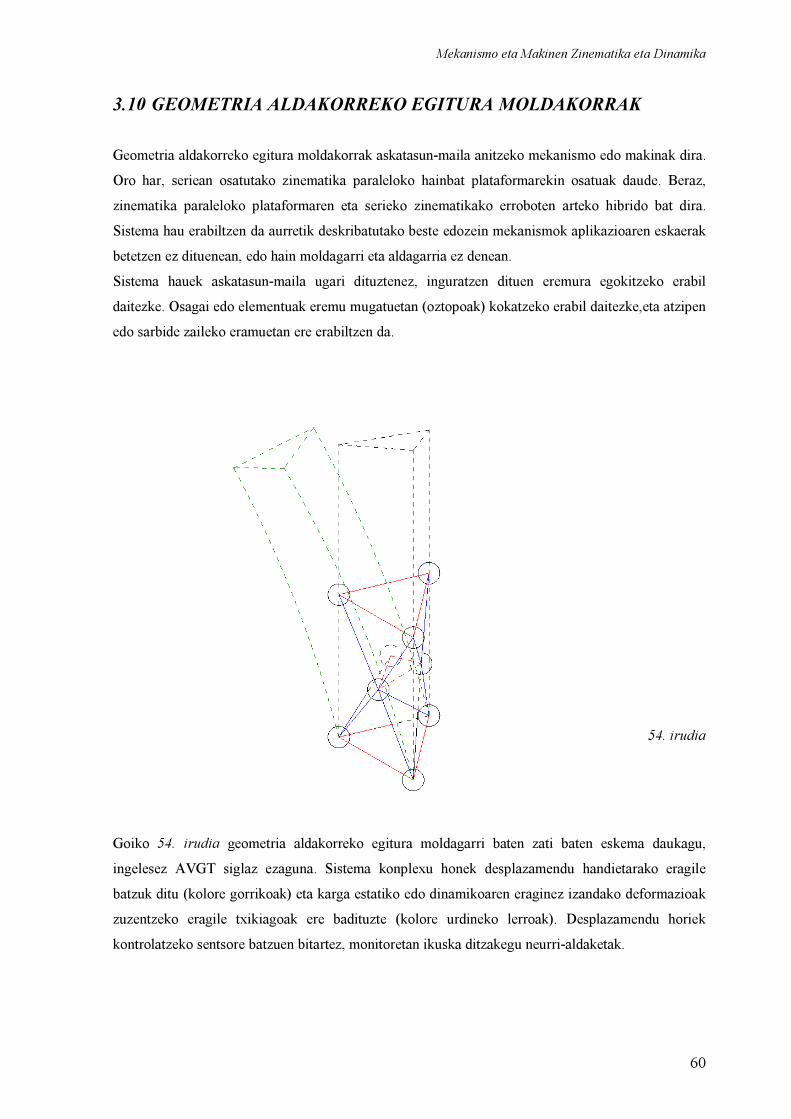
3.10 GEOMETRIA ALDAKORREKO EGITURA MOLDAKORRAK Geometria aldakorreko egitura moldakorrak askatasun-maila anitzeko mekanismo edo makinak dira. Oro har, seriean osatutako zinematika paraleloko hainbat plataformarekin osatuak daude. Beraz, zinematika paraleloko plataformaren eta serieko zinematikako erroboten arteko hibrido bat dira. Sistema hau erabiltzen da aurretik deskribatutako beste edozein mekanismok aplikazioaren eskaerak betetzen ez dituenean, edo hain moldagarri eta aldagarria ez denean. Sistema hauek askatasun-maila ugari dituztenez, inguratzen dituen eremura egokitzeko erabil daitezke. Osagai edo elementuak eremu mugatuetan (oztopoak) kokatzeko erabil daitezke,eta atzipen edo sarbide zaileko eramuetan ere erabiltzen da.
54. irudia Goiko 54. irudia geometria aldakorreko egitura moldagarri baten zati baten eskema daukagu, ingelesez AVGT siglaz ezaguna. Sistema konplexu honek desplazamendu handietarako eragile batzuk ditu (kolore gorrikoak) eta karga estatiko edo dinamikoaren eraginez izandako deformazioak zuzentzeko eragile txikiagoak ere badituzte (kolore urdineko lerroak). Desplazamendu horiek kontrolatzeko sentsore batzuen bitartez, monitoretan ikuska ditzakegu neurri-aldaketak.
Mekanismo eta Makinen Zinematika eta Dinamika
61
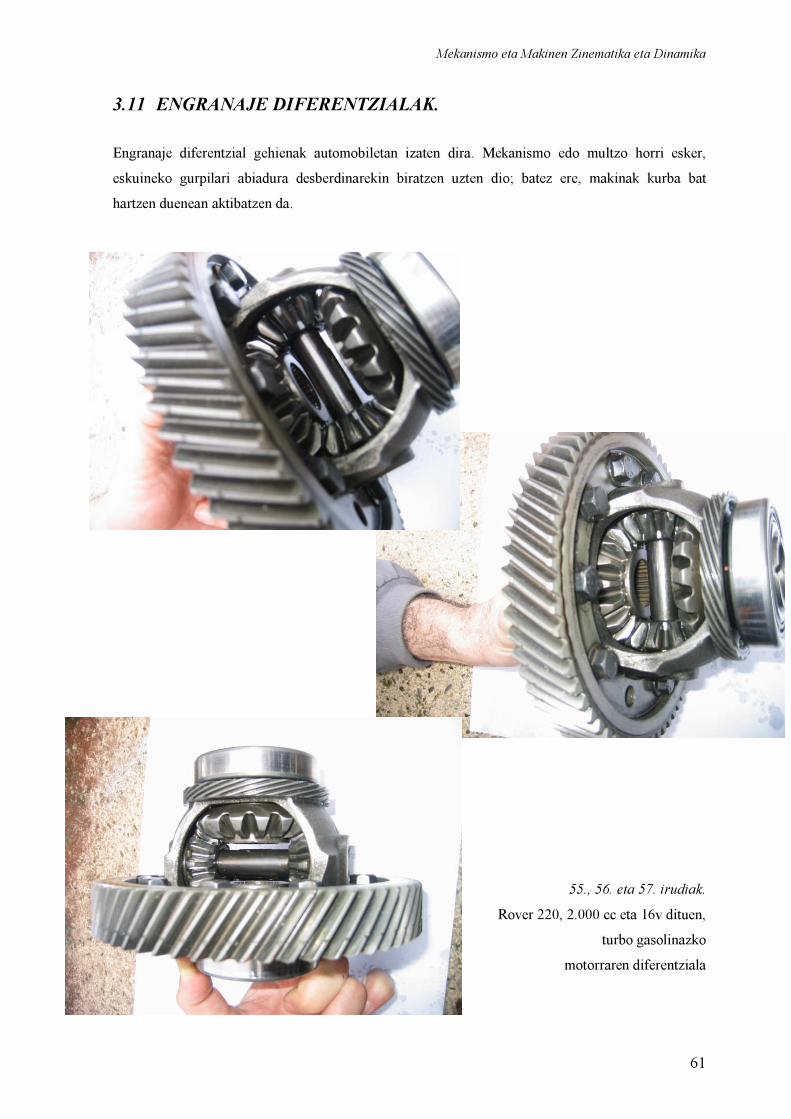
3.11 ENGRANAJE DIFERENTZIALAK. Engranaje diferentzial gehienak automobiletan izaten dira. Mekanismo edo multzo horri esker, eskuineko gurpilari abiadura desberdinarekin biratzen uzten dio; batez ere, makinak kurba bat hartzen duenean aktibatzen da.
55., 56. eta 57. irudiak. Rover 220, 2.000 cc eta 16v dituen,
turbo gasolinazko motorraren diferentziala

Mekanismo eta Makinen Zinematika eta Dinamika
62
3.12 ASKATASUN-MAILA ANITZEKO MAKINAK
Askatasun-maila anitzeko mekanismo edo makinetan, zinematika edo mugimendua aztertzea konplexuagoa da. Askatasun-maila bakarreko edo gutxiko mekanismoetan, desplazamendu, abiadura eta azelerazioei azkarrago antzeman dakieke n askatasun-mailako mekanismoetan baino. Daukaten erlazioagatik, zinematika konplikatzen bada, dinamika ere konplikatzen da.
Askatasun-maila anitzeko adibide bat, makina-erremintan asko erabiltzen den bost ardatzeko fresagailua izan daiteke. Modelo ezagun horren azalpenean bermatuta, atal hau errazago uler dezakegu.
Bost ardatzeko mekanizazio-zentroen aplikazioei begira, zinematikoki LLLRR motako
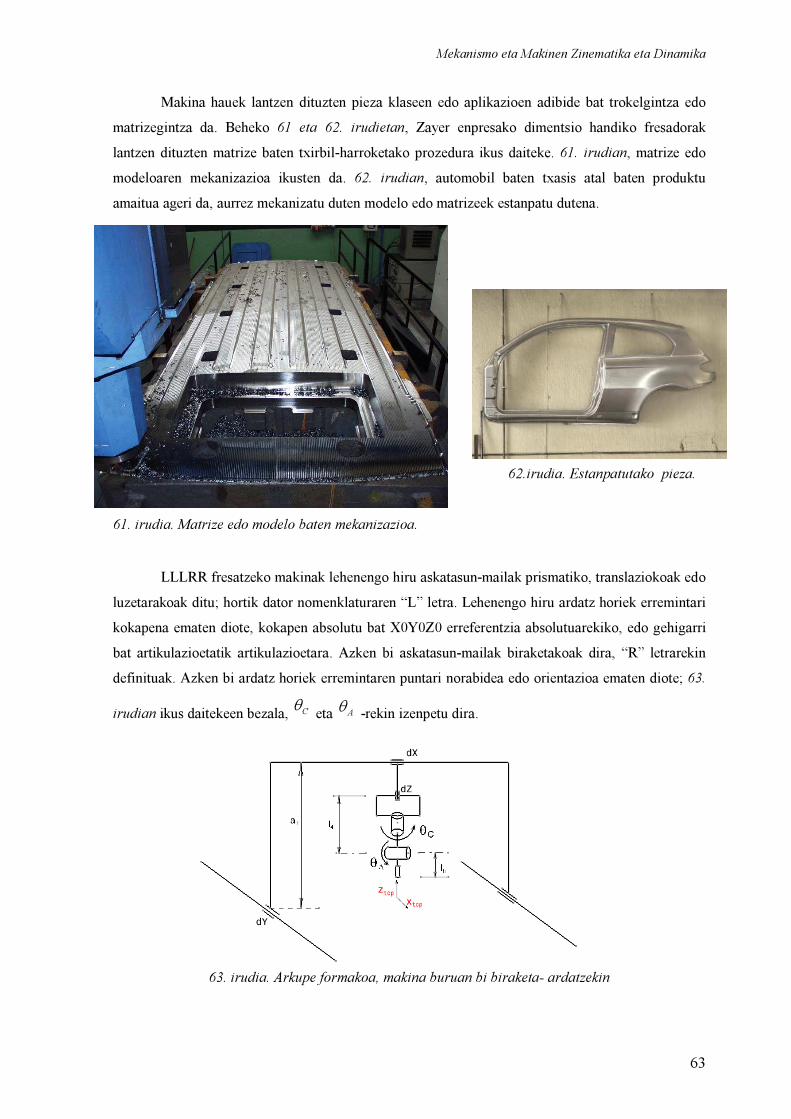
makina aztertuko dugu, non hiru askatasun-maila translaziokoak baitira eta bi biraketakoak. Fresagailu zubidunaren adibide bihauek izan daitezke: bata, “Gantry” izendapeneko zubi higikorreko langet edo langa higikorrarekin, eta bestea, langa finkoarekin. Behean, 58, 59, eta 60. irudietan, gaur egungo bi makina-ereduen argazkiak agertzen dira, Gasteizko Zayer enpresak utziak.
58. irudia. “Gantry” zubi higikorra.
59. eta 60. irudiak.
“Gantry” langa higikorra.
Mekanismo eta Makinen Zinematika eta Dinamika
63
Makina hauek lantzen dituzten pieza klaseen edo aplikazioen adibide bat trokelgintza edo matrizegintza da. Beheko 61 eta 62. irudietan, Zayer enpresako dimentsio handiko fresadorak lantzen dituzten matrize baten txirbil-harroketako prozedura ikus daiteke. 61. irudian, matrize edo modeloaren mekanizazioa ikusten da. 62. irudian, automobil baten txasis atal baten produktu amaitua ageri da, aurrez mekanizatu duten modelo edo matrizeek estanpatu dutena.
62.irudia. Estanpatutako pieza. 61. irudia. Matrize edo modelo baten mekanizazioa.
LLLRR fresatzeko makinak lehenengo hiru askatasun-mailak prismatiko, translaziokoak edo luzetarakoak ditu; hortik dator nomenklaturaren “L” letra. Lehenengo hiru ardatz horiek erremintari kokapena ematen diote, kokapen absolutu bat X0Y0Z0 erreferentzia absolutuarekiko, edo gehigarri bat artikulazioetatik artikulazioetara. Azken bi askatasun-mailak biraketakoak dira, “R” letrarekin definituak. Azken bi ardatz horiek erremintaren puntari norabidea edo orientazioa ematen diote; 63. irudian ikus daitekeen bezala, Cθ eta Aθ -rekin izenpetu dira.
63. irudia. Arkupe formakoa, makina buruan bi biraketa- ardatzekin
Mekanismo eta Makinen Zinematika eta Dinamika
64
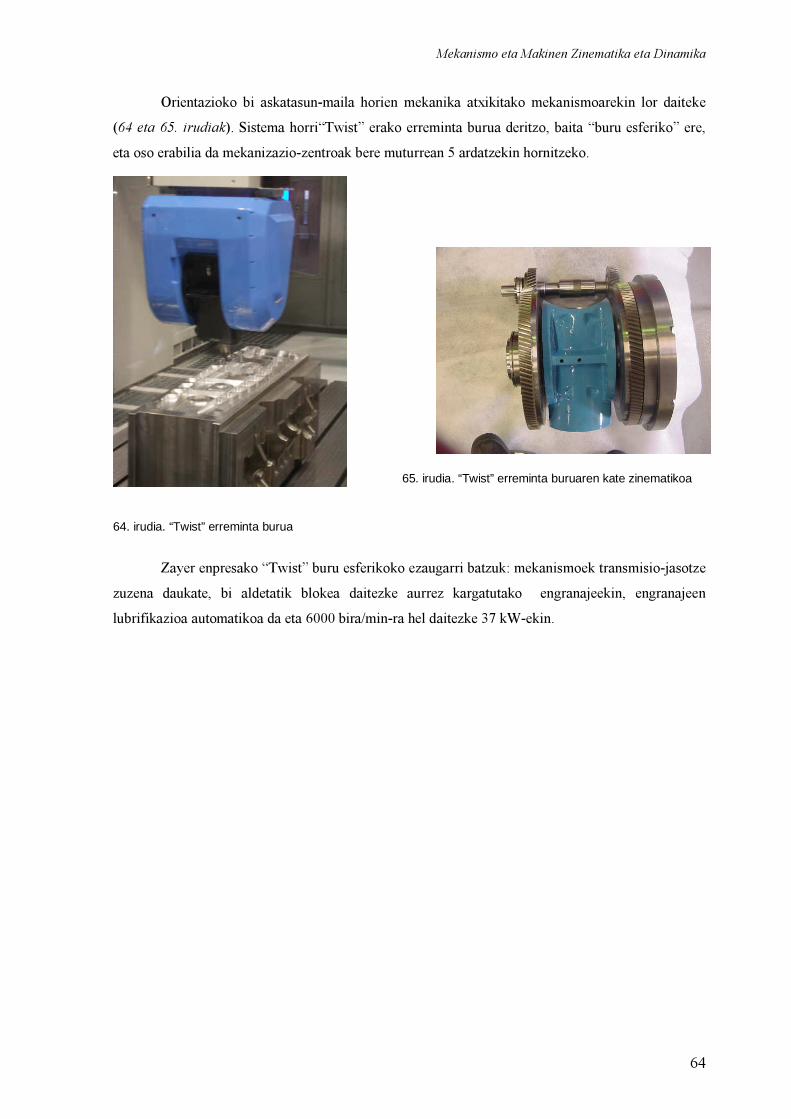
Orientazioko bi askatasun-maila horien mekanika atxikitako mekanismoarekin lor daiteke (64 eta 65. irudiak). Sistema horri“Twist” erako erreminta burua deritzo, baita “buru esferiko” ere, eta oso erabilia da mekanizazio-zentroak bere muturrean 5 ardatzekin hornitzeko.
65. irudia. “Twist” erreminta buruaren kate zinematikoa
64. irudia. “Twist” erreminta burua
Zayer enpresako “Twist” buru esferikoko ezaugarri batzuk: mekanismoek transmisio-jasotze
zuzena daukate, bi aldetatik blokea daitezke aurrez kargatutako engranajeekin, engranajeen lubrifikazioa automatikoa da eta 6000 bira/min-ra hel daitezke 37 kW-ekin.
Mekanismo eta Makinen Zinematika eta Dinamika
65
Espazioan Kokatzeko Erreminta Matematikoak
Errobotak, mekanizazio-zentroak bezala, espazio ezberdinetan mugitzen dira, eta kalkulu zinematikoetarako aplikazio berdintsua daukate.
Espazioan objektu edo puntuak kokatzeko zenbait erreminta matematiko ditugu; helburu nagusia solido zurrunen posizioa eta orientazioa dira. Posizioa kartesiarki, polarki, zilindrikoki edo esferikoki defini daiteke; orientazioa edo norabideak, aldiz, errotaziozko matrizearekim, Eulerren angeluekin, errotazio pareekin edo koaternioekin.
Posizio edo orientazioa hiru dimentsioko espazio batean batera adierazteko, transformazio homogeneoko matrizeak erabiltzen dira, algebra matrizialaren bitartez erabilera errazten baitute.
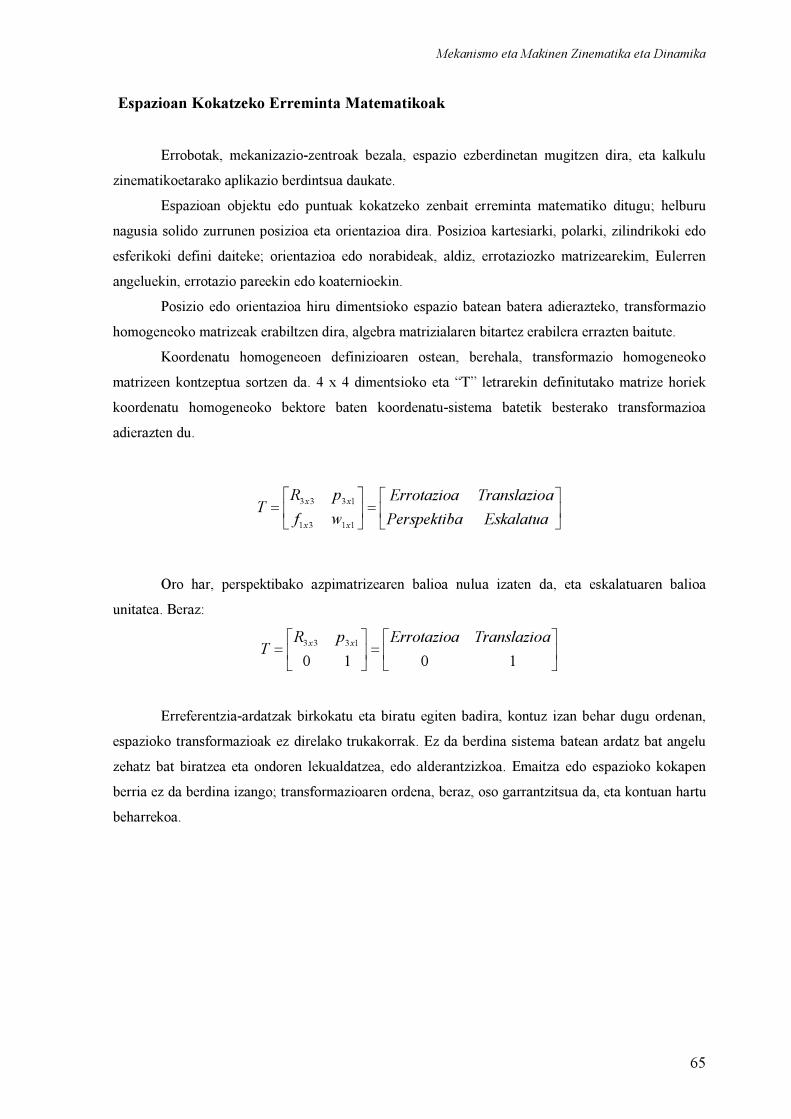
Koordenatu homogeneoen definizioaren ostean, berehala, transformazio homogeneoko matrizeen kontzeptua sortzen da. 4 x 4 dimentsioko eta “T” letrarekin definitutako matrize horiek koordenatu homogeneoko bektore baten koordenatu-sistema batetik besterako transformazioa adierazten du.
=
= EskalatuaaPerspektibaTranslazioErrotazioa
wfpRTxx
xx
1131
1333
Oro har, perspektibako azpimatrizearen balioa nulua izaten da, eta eskalatuaren balioa
unitatea. Beraz:
=
=1010
1333 aTranslazioErrotazioapRT xx
Erreferentzia-ardatzak birkokatu eta biratu egiten badira, kontuz izan behar dugu ordenan, espazioko transformazioak ez direlako trukakorrak. Ez da berdina sistema batean ardatz bat angelu zehatz bat biratzea eta ondoren lekualdatzea, edo alderantzizkoa. Emaitza edo espazioko kokapen berria ez da berdina izango; transformazioaren ordena, beraz, oso garrantzitsua da, eta kontuan hartu beharrekoa.
Mekanismo eta Makinen Zinematika eta Dinamika
66
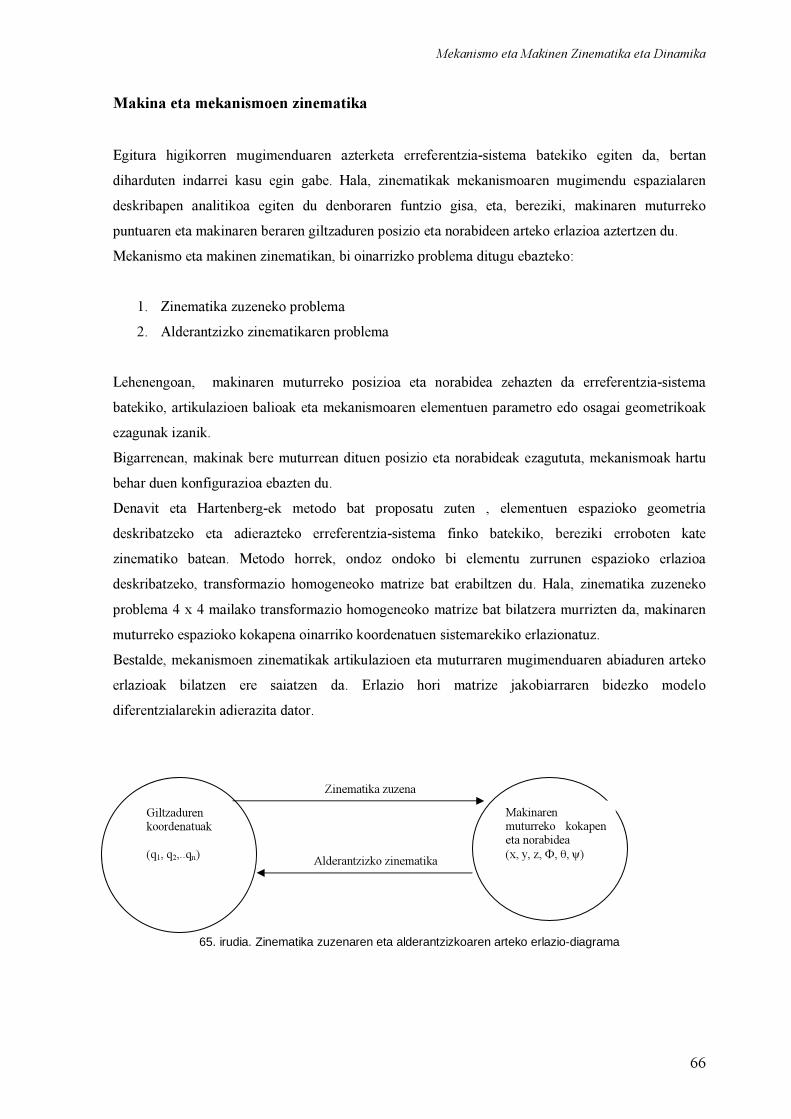
Makina eta mekanismoen zinematika Egitura higikorren mugimenduaren azterketa erreferentzia-sistema batekiko egiten da, bertan diharduten indarrei kasu egin gabe. Hala, zinematikak mekanismoaren mugimendu espazialaren deskribapen analitikoa egiten du denboraren funtzio gisa, eta, bereziki, makinaren muturreko puntuaren eta makinaren beraren giltzaduren posizio eta norabideen arteko erlazioa aztertzen du. Mekanismo eta makinen zinematikan, bi oinarrizko problema ditugu ebazteko:
1. Zinematika zuzeneko problema 2. Alderantzizko zinematikaren problema
Lehenengoan, makinaren muturreko posizioa eta norabidea zehazten da erreferentzia-sistema batekiko, artikulazioen balioak eta mekanismoaren elementuen parametro edo osagai geometrikoak ezagunak izanik. Bigarrenean, makinak bere muturrean dituen posizio eta norabideak ezagututa, mekanismoak hartu behar duen konfigurazioa ebazten du. Denavit eta Hartenberg-ek metodo bat proposatu zuten , elementuen espazioko geometria deskribatzeko eta adierazteko erreferentzia-sistema finko batekiko, bereziki erroboten kate zinematiko batean. Metodo horrek, ondoz ondoko bi elementu zurrunen espazioko erlazioa deskribatzeko, transformazio homogeneoko matrize bat erabiltzen du. Hala, zinematika zuzeneko problema 4 x 4 mailako transformazio homogeneoko matrize bat bilatzera murrizten da, makinaren muturreko espazioko kokapena oinarriko koordenatuen sistemarekiko erlazionatuz. Bestalde, mekanismoen zinematikak artikulazioen eta muturraren mugimenduaren abiaduren arteko erlazioak bilatzen ere saiatzen da. Erlazio hori matrize jakobiarraren bidezko modelo diferentzialarekin adierazita dator.
65. irudia. Zinematika zuzenaren eta alderantzizkoaren arteko erlazio-diagrama
Giltzaduren koordenatuak (q1, q2,..qn)
Makinaren muturreko kokapen eta norabidea (x, y, z, Ф, θ, ψ)
Zinematika zuzena
Alderantzizko zinematika

Mekanismo eta Makinen Zinematika eta Dinamika
67
Denavit eta Hartenberg-en algoritmoa zinematika zuzenaren modeloa lortzeko Denavit eta Hartenberg-ek, 1955. urtean, metodo matrizial bat proposatu zuten, modu sistematiko batean kate giltzatu baten i maila bakoitzera lotutako Si koordenatuen sistema bat ezartzen zuena. D-H adierazpenaren arabera, maila bakoitzerako koordenatuen sistemak egoki aukeratuta, mailaren ezaugarri geometrikoen mende soilik, lau transformaziorekin mailatik mailara pasatzea posible izango da. Oinarrizko transformazio horien oinarriak i elementuaren erreferentzia-sistema i-1 elementuaren sistemarekin erlazionatzen uzten duen biraketa eta translazio jarraituak dira. Aipatutako transformazioak hauek dira:
1. θi angelu bat Zi-1 ardatzaren inguruan. 2. di distantzia baten translazioa Zi-1 ardatzaren luzetara. di , (0,0,di ) bektorea. 3. ai distantzia baten translazioa Xi-1 ardatzaren luzetara. ai , (ai ,0,0 ) bektorea. 4. αi angelu bat xi ardatzaren inguruan.
Matrizeen biderkadura trukakorra ez denez, transformazioak adierazitako ordenan egin behar dira:
),()0,0,(),0,0(),(1iiiii
i xTaTdTzTA αθ=−
Eta matrizeen arteko biderkadura eginez:
−
−=
=
−
−=−
10000
100000000001
100001000010
001
100010000100001
100001000000
1
iii
iiiiiii
iiiiiii
ii
ii
i
i
ii
ii
ii
dCSSaSCCCSCaSSSCC
CSSC
a
dCSSC
A
ααθαθαθθθαθθαθ
ααααθθ
θθ
Agian, gogoratu beharko da C letrak cos funtzio trigonometrikoa esan nahi duela eta S-k sin. Non θi ,di ,ai eta αi “i” mailaren D-H parametroak baitira. Modu honetara, i
i A1− matrizeak lortzeko, nahikoa da θi ,di ,ai eta αi parametroak ezagutzea, eta horrela makinaren maila guztiak eta bakoitza erlazionatzea.

Mekanismo eta Makinen Zinematika eta Dinamika
68
ii A1− matrizeak Si-1 eta Si sistemak erlazionatzeko norma zehatz batzuekin adostuta aukeratu beharko dira. Haiek, Denavit eta Hartenberg-en 4 parametroen definizioarekin batera, zinematika zuzeneko problema ebazteko algoritmoa osatzen dute:
DH1 Mailak izendatu 1ekin hasita (kateko lehen maila higikorra) eta n-rekin bukatuta (azken maila higikorra). 0 mailatzat makinaren oinarri finkoa hartuko da.
DH2 Giltzadura bakoitza izendatu 1ekin hasita (lehenengo askatasun-mailari dagokiona) eta n-rekin bukatuz.
DH3 Giltzadura bakoitzaren ardatza kokatu. Birakaria bada, ardatza izango da haren biraketa-ardatza. Prismatikoa bada, desplazamendua sortzen den luzetarako ardatza izango da.
DH4 i 0 tik (n-1)-eraino, i+1 giltzaduraren ardatzaren gainean Zi ardatza kokatu.
DH5 (S0) oinarriaren sistemaren jatorria Z0 ardatzaren edozein puntutan kokatu. X0 eta Y0, Z0-rekiko sistema eskuin-birakari bat sortzen dute.
DH6 i, 1-etik (n-1)-era, (Si) sistema (i mailarekiko solidarioa) Zi-1 eta Zi ardatzen lerro arruntarekiko normal eta Zi ardatzaren ebaketa puntuan kokatu. Bi ardatzek elkar ebakitzen badute, (Si) ebaketa-puntuan jarriko da. Paraleloak badira, (Si) i+1 giltzaduran kokatuko da.
DH7 Xi, Zi-1 eta Zi lerro arrunt normalean kokatu.
DH8 Yi kokatu; Xi eta Zi-rekin sistema eskuin-birakari bat sortuko du. DH9 (Sn) makinaren muturrean kokatu; Zn-k Zn-1 norabidearekin topo egingo du, eta Xn, Zn-1
eta Zn-rekiko normala da. DH10 θi lortu; Zi-1-ren inguruan Xi-1 eta Xi paraleloak geratzeko behar den angelua da.
DH11 di lortu, Zi-1 ardatzaren luzeran neurtuta; (Si-1) desplazatu beharko genukeena Xi eta Xi-1
lerrokatuak gera daitezen.
DH12 ai lortu, Xi ardatzaren luzeran neurtuta (orain (Xi-1)-ekin bat egingo duena; (Si-1) berria desplazatu beharko genukeena, beraren jatorriak (Si)-rekin topo egin zezan.
Mekanismo eta Makinen Zinematika eta Dinamika
69
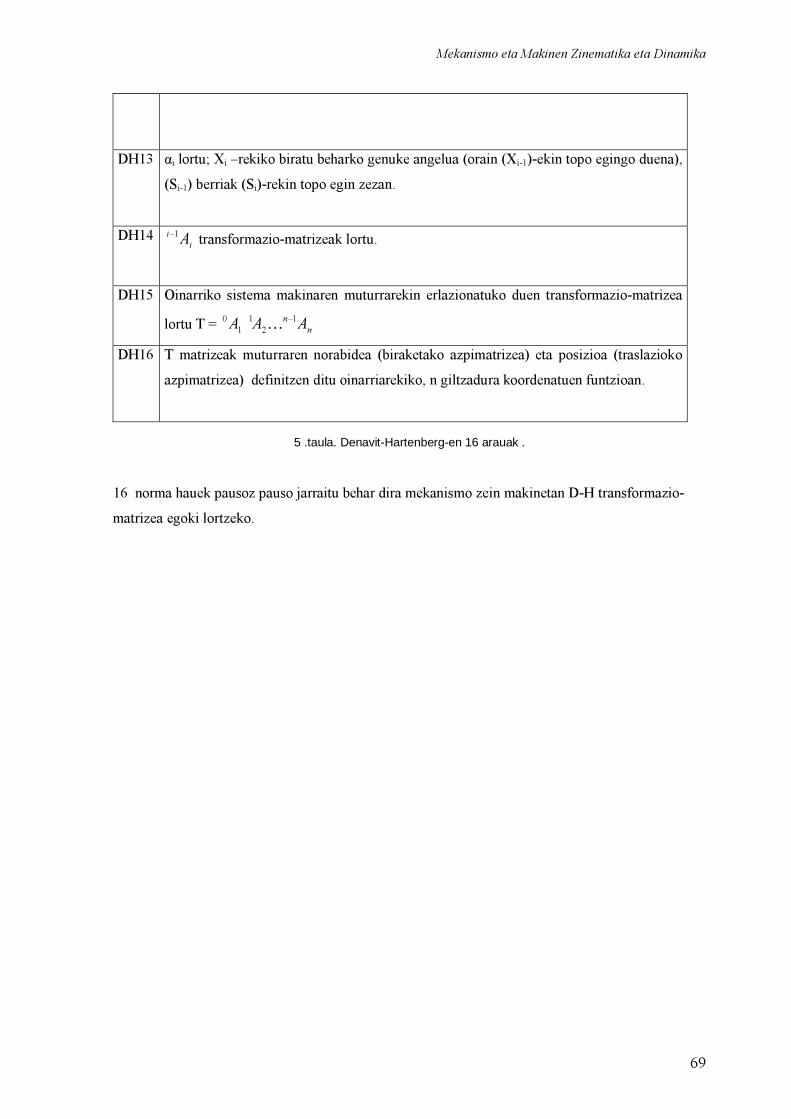
DH13 αi lortu; Xi –rekiko biratu beharko genuke angelua (orain (Xi-1)-ekin topo egingo duena), (Si-1) berriak (Si)-rekin topo egin zezan.
DH14 i
i A1− transformazio-matrizeak lortu.
DH15 Oinarriko sistema makinaren muturrarekin erlazionatuko duen transformazio-matrizea lortu T = n
n AAA 12
11
0 −
K DH16 T matrizeak muturraren norabidea (biraketako azpimatrizea) eta posizioa (traslazioko
azpimatrizea) definitzen ditu oinarriarekiko, n giltzadura koordenatuen funtzioan.
5 .taula. Denavit-Hartenberg-en 16 arauak .
16 norma hauek pausoz pauso jarraitu behar dira mekanismo zein makinetan D-H transformazio-matrizea egoki lortzeko.
Mekanismo eta Makinen Zinematika eta Dinamika
70
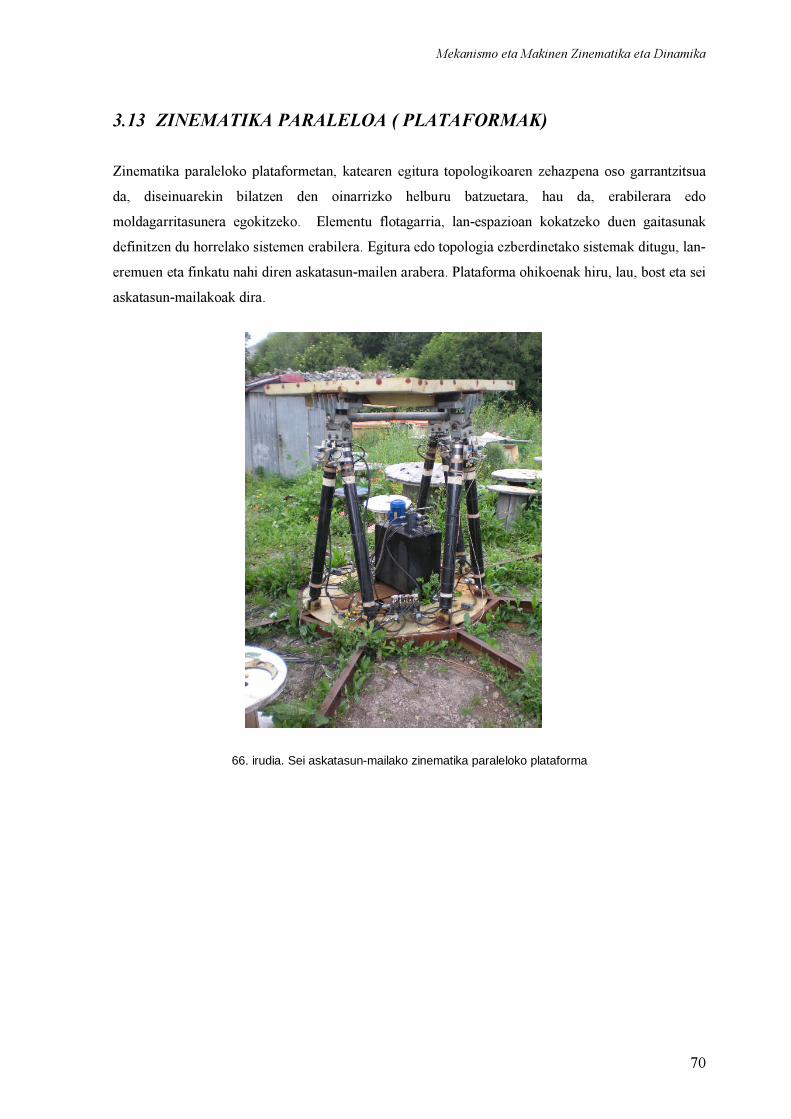
3.13 ZINEMATIKA PARALELOA ( PLATAFORMAK) Zinematika paraleloko plataformetan, katearen egitura topologikoaren zehazpena oso garrantzitsua da, diseinuarekin bilatzen den oinarrizko helburu batzuetara, hau da, erabilerara edo moldagarritasunera egokitzeko. Elementu flotagarria, lan-espazioan kokatzeko duen gaitasunak definitzen du horrelako sistemen erabilera. Egitura edo topologia ezberdinetako sistemak ditugu, lan-eremuen eta finkatu nahi diren askatasun-mailen arabera. Plataforma ohikoenak hiru, lau, bost eta sei askatasun-mailakoak dira.
66. irudia. Sei askatasun-mailako zinematika paraleloko plataforma

Mekanismo eta Makinen Zinematika eta Dinamika
71
4 MEKANISMO LAUEN ANALISI ZINEMATIKOAREN SARRERA
Mekanismoen zinematikaren analisia, zenbait metodorekin egin daiteke. Honela taldekatu daitezke metodoak:
a) Emaitzaren formaren arabera: 1. Metodo grafikoak 2. Metodo analitikoak 3. Metodo numerikoak
b) Mekanismoaren anplitudearen (denboraren) arabera: 1. Kokapen-metodoak 2. Ziklo osoko metodoak
4.1 EMAITZAREN FORMAREN ARABERAKO ANALISI ZINEMATIKOA
Metodo grafikoak antzinakoenak dira, agertu ziren lehenak, eta tradizionalki erabilienak. Hala gertatu zen planteamendu analitikoek ekuazio ez-linealeko sistemetara jotzen zutelako. Nahiz eta gaur egun arazo analitiko horiek gaindituak izan, metodo grafikoak ez dira zaharkituak geratu. Metodo grafikoek abantaila hauek dauzkate: • Oso intuitiboak dira; hala, mekanismoa ondo ulertzea lor daiteke. • Aplikatzeko errazak dira. • Ez da kalkulu-erreminta zailik behar. • Maila pedagogiko altua daukate.
Baina desabantaila hauek dituzte: • Posizio edo kokapen zehatzeko metodoak dira. • Ebazpen-denbora asko behar dute. • Ezin dira beti nahi diren emaitzak lortu. • Irudiaren akatsek emaitzak aldatuko dituzte.
Mekanismo eta Makinen Zinematika eta Dinamika
72
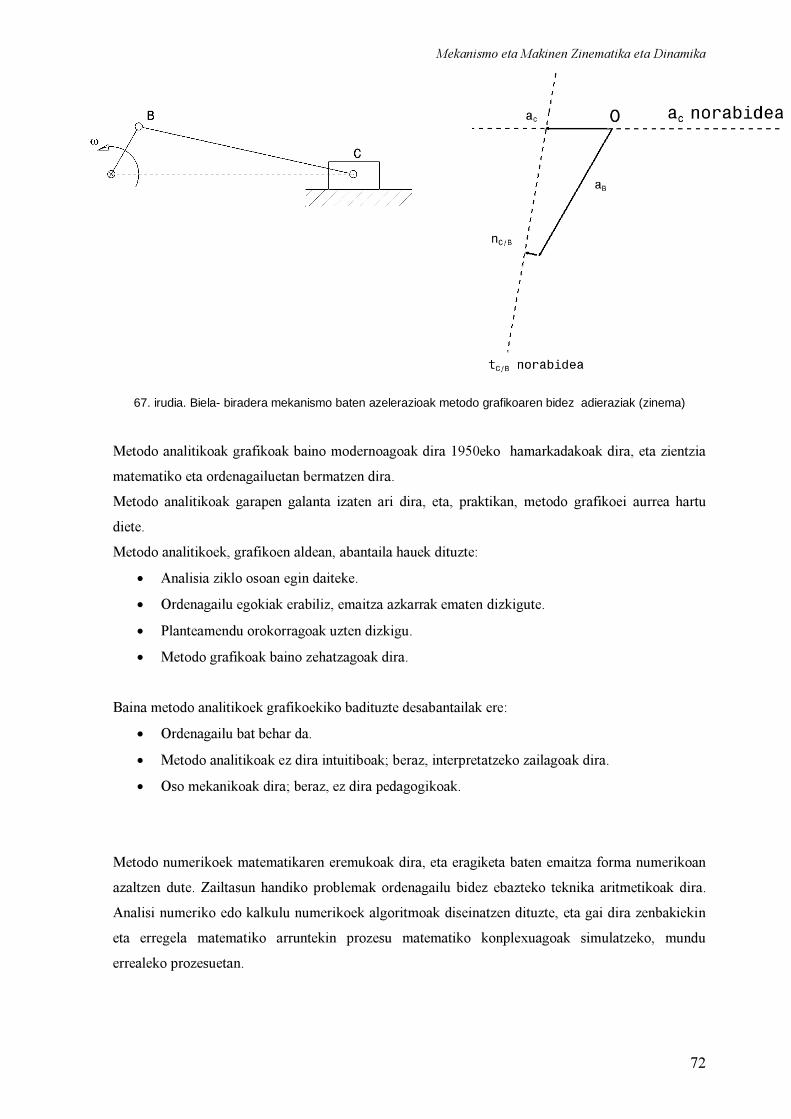
67. irudia. Biela- biradera mekanismo baten azelerazioak metodo grafikoaren bidez adieraziak (zinema)
Metodo analitikoak grafikoak baino modernoagoak dira 1950eko hamarkadakoak dira, eta zientzia matematiko eta ordenagailuetan bermatzen dira. Metodo analitikoak garapen galanta izaten ari dira, eta, praktikan, metodo grafikoei aurrea hartu diete. Metodo analitikoek, grafikoen aldean, abantaila hauek dituzte: • Analisia ziklo osoan egin daiteke. • Ordenagailu egokiak erabiliz, emaitza azkarrak ematen dizkigute. • Planteamendu orokorragoak uzten dizkigu. • Metodo grafikoak baino zehatzagoak dira.
Baina metodo analitikoek grafikoekiko badituzte desabantailak ere: • Ordenagailu bat behar da. • Metodo analitikoak ez dira intuitiboak; beraz, interpretatzeko zailagoak dira. • Oso mekanikoak dira; beraz, ez dira pedagogikoak.
Metodo numerikoek matematikaren eremukoak dira, eta eragiketa baten emaitza forma numerikoan azaltzen dute. Zailtasun handiko problemak ordenagailu bidez ebazteko teknika aritmetikoak dira. Analisi numeriko edo kalkulu numerikoek algoritmoak diseinatzen dituzte, eta gai dira zenbakiekin eta erregela matematiko arruntekin prozesu matematiko konplexuagoak simulatzeko, mundu errealeko prozesuetan.
Mekanismo eta Makinen Zinematika eta Dinamika
73
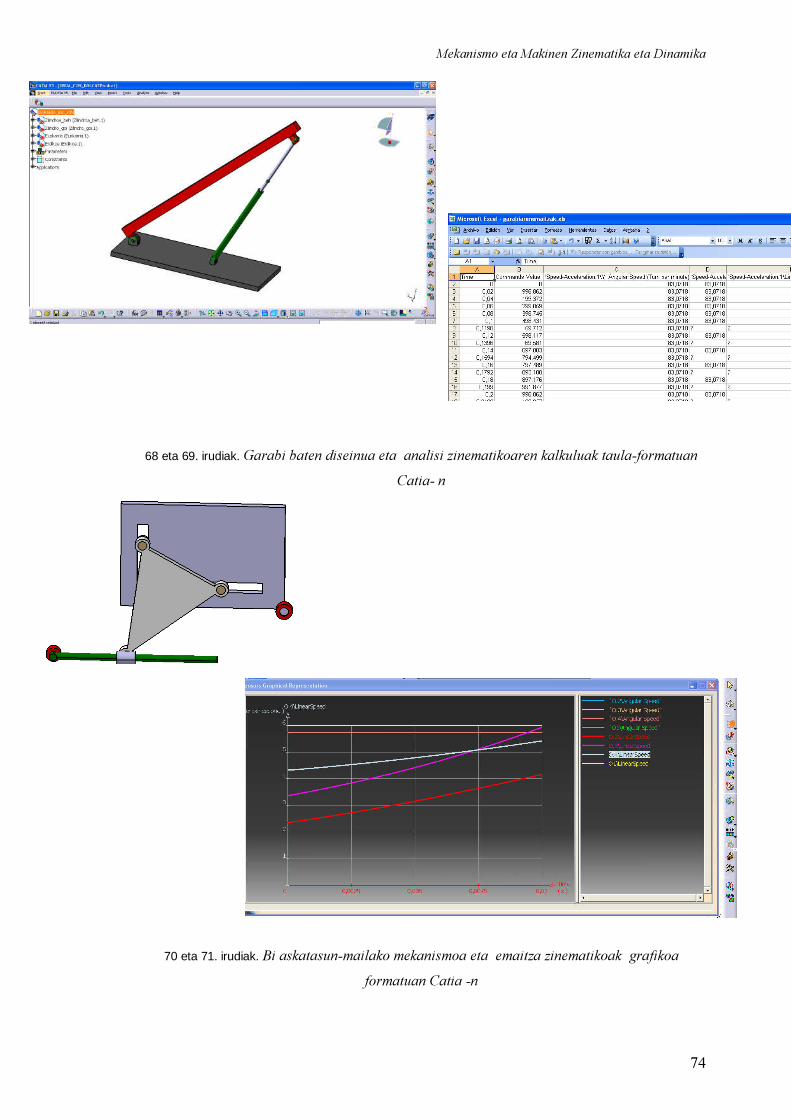
Kalkulu numerikoaren munduan algoritmo bat prozedura bat da, modu logikoan exekuta daitezkeen pauso finituen bidezko problema baten gertuko emaitza batera eramango gaituena. Metodo numerikoak, analitikoekin konparatuz, orokorragoak edo aplikazio zabalagokoak dira, mekanismo berezi bakoitzarentzat ez dutelako ekuazio multzo ezberdin bat garatu behar. Beraz, ez dugu jatorrizko programara joan behar ekuazioak aldatzeko, analitikoetan gertatzen den bezala, programa bakar batek edozein mekanismorentzat balio baitu. Metodo numerikoak analitikoak baino azkarragoak dira, baina ez dira hain zehatzak. Metodo numerikoek zenbakiak bilatzen dituzte; metodo analitikoek, ordea, formula matematikoak. Logikoki, emaitza analitikoa unibertsala denez, emaitza numeriko guztiak ditu. Bestalde, problema baten emaitza numerikotik ezinezkoa da, oro har, emaitza analitiko bat lortzea. Formazioaren aldetik, metodo grafiko, numeriko eta analitikoen arteko adostasun bat behar da, mekanismoen analisi zinematiko egokiak izateko. Makinen diseinatzaileentzat metodo analitiko, grafiko, zein numerikoa garrantzitsuak dira; bata edo bestea erabiltzea, zehaztasunaren, azkartasunaren, ordenagailua izatearen edo ez izatearen…. eta beste hainbat faktoreren menpe egongo da. Ondoren, mekanismo batzuen metodo numerikoen analisi zinematikorako adibide batzuk ditugu. Mekanismoak zinematikoki analizatzen dituen hiru software hauen izenak Catia, Working Model eta Matlab dira.
Mekanismo eta Makinen Zinematika eta Dinamika
74
68 eta 69. irudiak. Garabi baten diseinua eta analisi zinematikoaren kalkuluak taula-formatuan Catia- n
70 eta 71. irudiak. Bi askatasun-mailako mekanismoa eta emaitza zinematikoak grafikoa formatuan Catia -n

Mekanismo eta Makinen Zinematika eta Dinamika
75
72. irudia. Lauki giltzatua Working Model –en.
73. irudia. Abiadura eta azelerazioen emaitzak bektore eta grafiko gisa Working Model-en.
Mekanismo eta Makinen Zinematika eta Dinamika
76
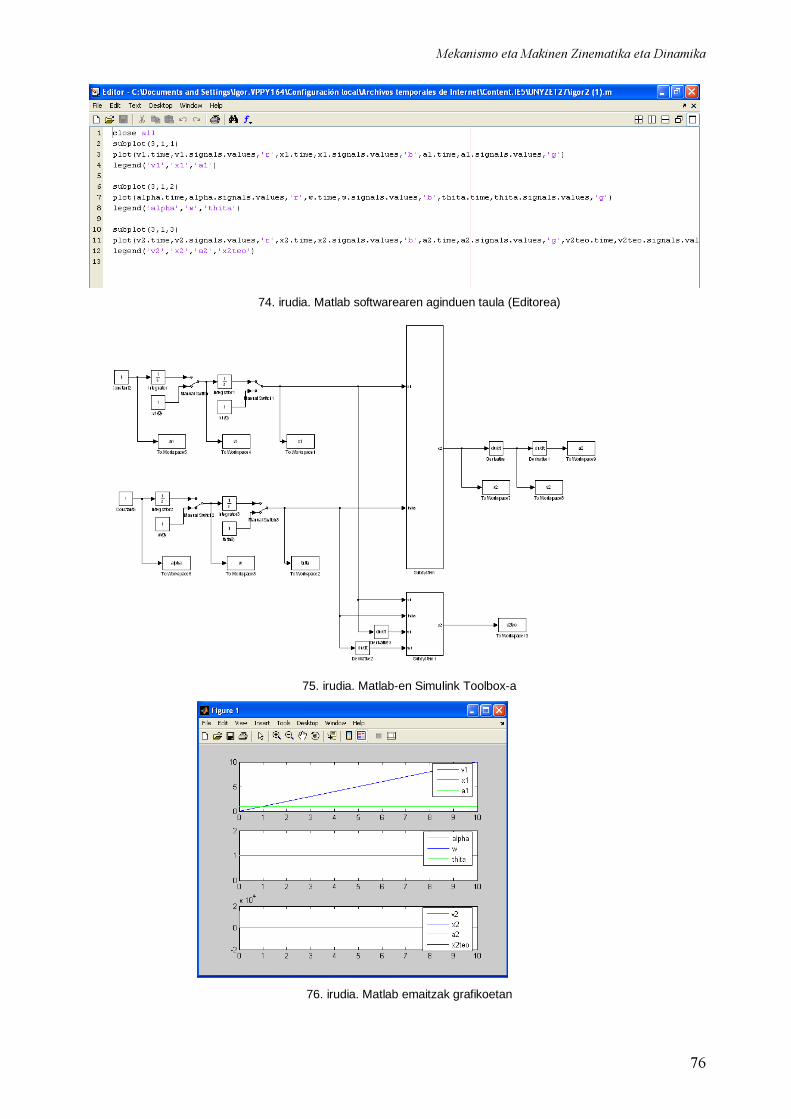
74. irudia. Matlab softwarearen aginduen taula (Editorea)
75. irudia. Matlab-en Simulink Toolbox-a
76. irudia. Matlab emaitzak grafikoetan
Mekanismo eta Makinen Zinematika eta Dinamika
77
4.2 MEKANISMOAREN ANPLITUDEAREN (DENBORAREN) ARABERAKO ANALISI ZINEMATIKOA
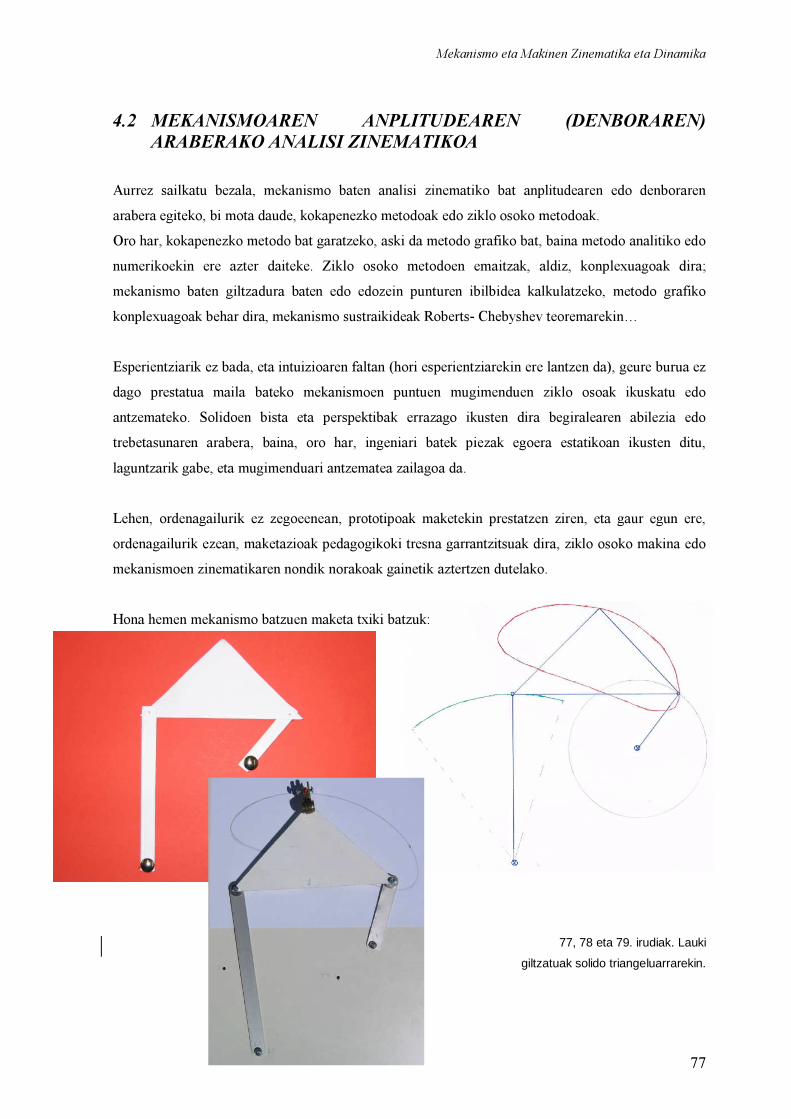
Aurrez sailkatu bezala, mekanismo baten analisi zinematiko bat anplitudearen edo denboraren arabera egiteko, bi mota daude, kokapenezko metodoak edo ziklo osoko metodoak. Oro har, kokapenezko metodo bat garatzeko, aski da metodo grafiko bat, baina metodo analitiko edo numerikoekin ere azter daiteke. Ziklo osoko metodoen emaitzak, aldiz, konplexuagoak dira; mekanismo baten giltzadura baten edo edozein punturen ibilbidea kalkulatzeko, metodo grafiko konplexuagoak behar dira, mekanismo sustraikideak Roberts- Chebyshev teoremarekin… Esperientziarik ez bada, eta intuizioaren faltan (hori esperientziarekin ere lantzen da), geure burua ez dago prestatua maila bateko mekanismoen puntuen mugimenduen ziklo osoak ikuskatu edo antzemateko. Solidoen bista eta perspektibak errazago ikusten dira begiralearen abilezia edo trebetasunaren arabera, baina, oro har, ingeniari batek piezak egoera estatikoan ikusten ditu, laguntzarik gabe, eta mugimenduari antzematea zailagoa da. Lehen, ordenagailurik ez zegoeenean, prototipoak maketekin prestatzen ziren, eta gaur egun ere, ordenagailurik ezean, maketazioak pedagogikoki tresna garrantzitsuak dira, ziklo osoko makina edo mekanismoen zinematikaren nondik norakoak gainetik aztertzen dutelako. Hona hemen mekanismo batzuen maketa txiki batzuk:
77, 78 eta 79. irudiak. Lauki
giltzatuak solido triangeluarrarekin.
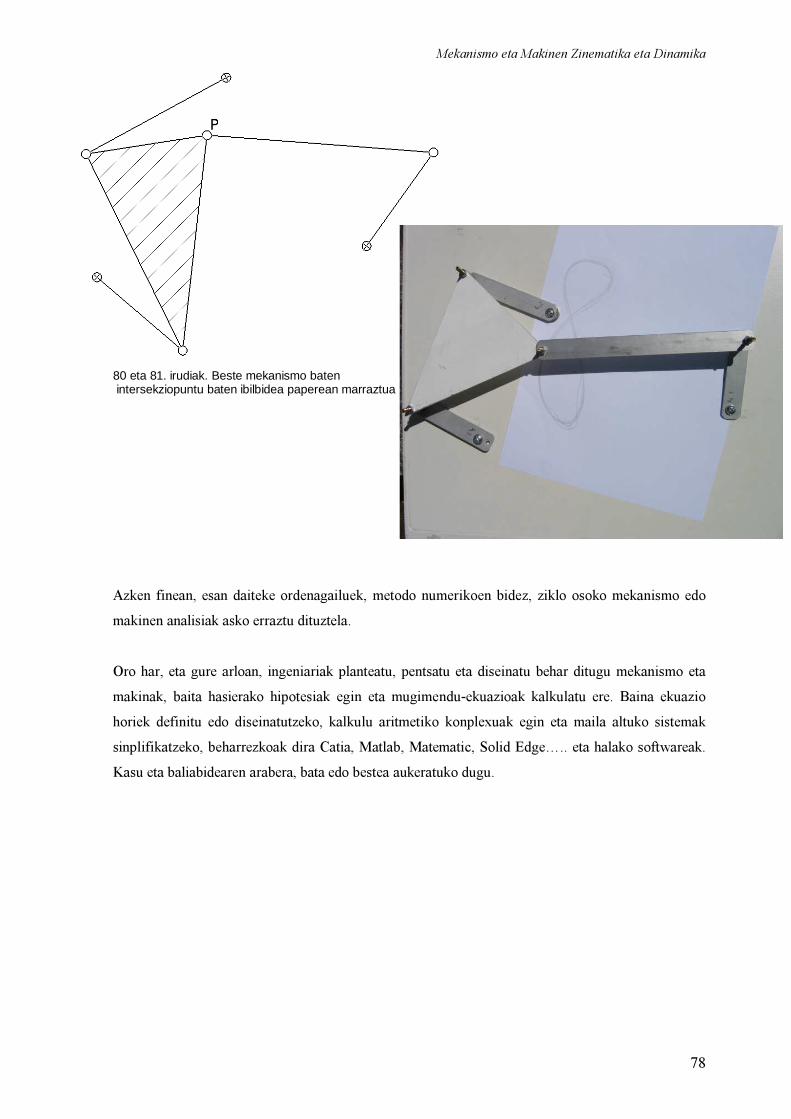
Mekanismo eta Makinen Zinematika eta Dinamika
78
80 eta 81. irudiak. Beste mekanismo baten intersekziopuntu baten ibilbidea paperean marraztua Azken finean, esan daiteke ordenagailuek, metodo numerikoen bidez, ziklo osoko mekanismo edo makinen analisiak asko erraztu dituztela. Oro har, eta gure arloan, ingeniariak planteatu, pentsatu eta diseinatu behar ditugu mekanismo eta makinak, baita hasierako hipotesiak egin eta mugimendu-ekuazioak kalkulatu ere. Baina ekuazio horiek definitu edo diseinatutzeko, kalkulu aritmetiko konplexuak egin eta maila altuko sistemak sinplifikatzeko, beharrezkoak dira Catia, Matlab, Matematic, Solid Edge….. eta halako softwareak. Kasu eta baliabidearen arabera, bata edo bestea aukeratuko dugu.
Mekanismo eta Makinen Zinematika eta Dinamika
79
4.3 ERABILITAKO PROGRAMA INFORMATIKOAK Adibidez, Denavit eta Hartenberg-en algoritmoak, zinematika zuzena, alderantzizkoa eta matrizeen eragiketa konplexuenak erraz eta azkar ebazteko, Matlab eta Mathematica programetara jo da. Matlab-ekin ebazpen sinbolikoak konplikatzen zirenean, Mathematica-ra jo dugu, eta eragiketa horien guztien kalkuluak asko erraztu zaizkigu. Working Model eta Catia oso egokiak dira ziklo osoak aztertzeko, argiak baitira eta multimedia adierazpen-zehatzak baitituzte, eta horrek pedagogiaren aldetik laguntza asko ematen digu. Matlab Matlab arlo zientifiko eta ingeniaritzakoan zenbakizko kalkulura bideratua dagoen softwarezko pakete bat da. Zenbakien kalkulu, eta matrize eta grafikoen konputazioz osatua dago, erabiltzailearentzako lan-ingurune eroso batean. Izenak Matrizeen Laborategia esan nahi du. LINPACK eta EISPACK paketeetarako sarrera errazteko idatzi zen hasiera batean (pakete horiek liburutegi estandarrak ziren, 1960ko hamarkadan, FORTRAN lengoaiaren azpian miniordenagailuetan matrizeen kalkuluetarako). Erabiltzaile askoren ekarpenarekin, Matlab eboluzionatu eta haZi egin da. Mathematica eta Maple programekin batera, Algebra Lineal aplikaturako eta beste arlo batzuen kurtsoetarako oinarrizko erreminta bihurtu da. Inguru industrialean, arazo praktiko eta ingenieritzako kalkuluak egiteko erabiltzen da. Zenbakizko kalkuluak, algoritmoen sortzea, formulazio matrizialaren bidez problemak ebaztea, estatistika, optimizazioa… Azpimarratzekoa da sistema dinamiko eta kontrolaren azterketa, simulazio eta diseinuaren aplikazioa. Matlab maneiatzen ikasteko, informatikako ezagutza sakonik ez da behar, baina komeni da MS-Windows sistema eragilearen nozio batzuk izatea. Hauek dira haren ezaugarri garrantzitsuenak:
� Zenbakizko kalkulua: Zenbaki erreal eta konplexuak. � Datu mota bakarra: Matrizeak. � Zenbakizko sinbolo eta adierazpenak. � Programazio-lengoaia. � Grafikoak.
Mekanismo eta Makinen Zinematika eta Dinamika
80
Matlab-en funtzionamenduari dagokionez, esan behar da komandoen interpretazio-programa dela. Horrek esan nahi du gai dela aurretik definitutako komando serie bat modu sekuentzialean prozesatzeko, eta modu azkarrrean emaitzak aurkitzeko. Komandoak Matlab programarenak berarenak edo erabiltzaileak definituak izan daitezke. Matlab-ek prozesu hori egin ahal izateko, erabiltzaileak komandoen lista komandoen leihoan idatzi beharko du zerrenda laburra bada, edo .m luzapenarekin fitxategi batean, programa bat osatuz. Erabilitako bertsioa: Matlab 7.0.1 Mathematica Zientziaren eremuan, ingeniaritzan, matematikan eta konputazioaren eremuan erabilitako programa da Mathematica. Stephen Wolfram-ek sortu zuen. Gaur egun ere, bera da Wolfram Research enpresako matematikari eta programatzaile taldearen liderra. Wolfram Research Champaign-en dago (Illinois). Algebra konputazionaleko sistema bat kontsideratua izan arren, helburu orokorretarako programazio-lengoaia ahaltsu bat ere bada Mathematica.
Ezaugarri orokorrak hauek dira: programa terminoen berridazketan oinarritua dago, konputazio sinboliko gisa identifika daitekeena, eta programazio funtzionalari eta prozeduren erabilerari eusten diena; hala ere, programazio funtzionala eraginkorragoa da. Objektuei zuzendutako C programazio-lengoaiaren aldaera batean ezarria dago; librerien kode zabalaren gehientsuena, errealitatean, Mathematica lengoaian idatzia dago, eta sistema algebraikoa luzatzeko erabil daiteke. Normalean, kode berria Mathematica paketeen forman batu daiteke, Mathematica lengoaian idatzitako testu-artxibo gisa.
Erabilitako bertsioa: Mathematica 5.1
Working Model “MSC Software Corporation ” enpresaren 2D-ko sistema mekanikoen simulazio-programa bat da. Proiektu honetan erabilitako bertsioa 7.0 izan da, 2004 urtekoa. Beste hainbat programak bezala, prototipoen fabrikazioaren denborak murrizten ditu, eta euskarri logiko horren deskribapena hau izan daiteke: CAD erreminta hau kontzeptualki simulazioak sor ditzakeen diseinu-erreminta bat da, denbora-kontsumoa eta diseinuan lagunduko ez duten kalkulu zehaztugabeak ordezkatzen dituena. Working

Mekanismo eta Makinen Zinematika eta Dinamika
81
Model-ekin sistema mekaniko errealak sortu eta analizatzen dira. Oinarritik, Windows 95/96/Me/Nt/2000/XP sistema eragileekin optimizatzeko diseinatu da. Talka automatikoaren detekzioa eta geometriaren erantzunak barne ditu. Catia V5 eta haren DMU-Kinematics modulua Catia CAD/CAM/CAE programa komertzial bat da, Dassault Systemes-ek (Frantzia) egina. Programa hau, produktuen diseinura (CAD), produkziora (CAM) eta analisiaren sorkuntzara (CAE) hedatua dago. Lan honetan darabildan CATIA V5 bertsioa Microsoft Windows-ekin dabil, eta arkitektura irekia dauka aplikazioak hedatzeko edo programa pertsonalizatzeko. Catiak 3D-ko konponbideak dakartza prozesuen diseinu kooperatiboentzat. Enpresa industrial nagusien konpromezuarekin sortua izan da, eta software hau aurrerapauso bat izan da produkzioaren ingeniaritza integratuen euskarriei dagokienez. Programa hau, hasiera batean, aeronautika-industriari eskaini zitzaion, eta, gaur egun, gainazal osoen maneiu edo erabileran nabarmentzen da. Automobilaren industrian ere oso erabilia da karrozeria-osagaien diseinuan eta sorkuntzan. VW taldeak (Volkswagen, Audi, Seat, Skoda), BMW, Renault, Porsche, Daimler Chyrsler…. enpresek, konkretuki, programaren erabilera zabal bat egiten dute. Eraikuntzako industriara ere egokitu da software hau, oso forma konplexuko eraikinak sortzeko, hala nola Bilboko Guggenheim fundazioaren museoa… Catiaren DMU-Kinematics modulua, gorputz edo produktuen diseinuaren (CAD) ostean, erreminta baliagarria da irakasgai honetarako. Bertan: • Mekanismoak definitzen dira, haien lotura, limite eta komandoekin. • Mekanismoen analisi, aldaketa eta simulazioak egiten dira. • Ibilbide eta talkak aktibatzen dira. • Legeen sorkuntzarekin eta lege horien simulazioarekin lan egin daiteke. • …
Mekanismo eta Makinen Zinematika eta Dinamika
82
Mekanismo eta Makinen Zinematika eta Dinamika
83
MEKANISMO ETA MAKINEN ZINEMATIKA
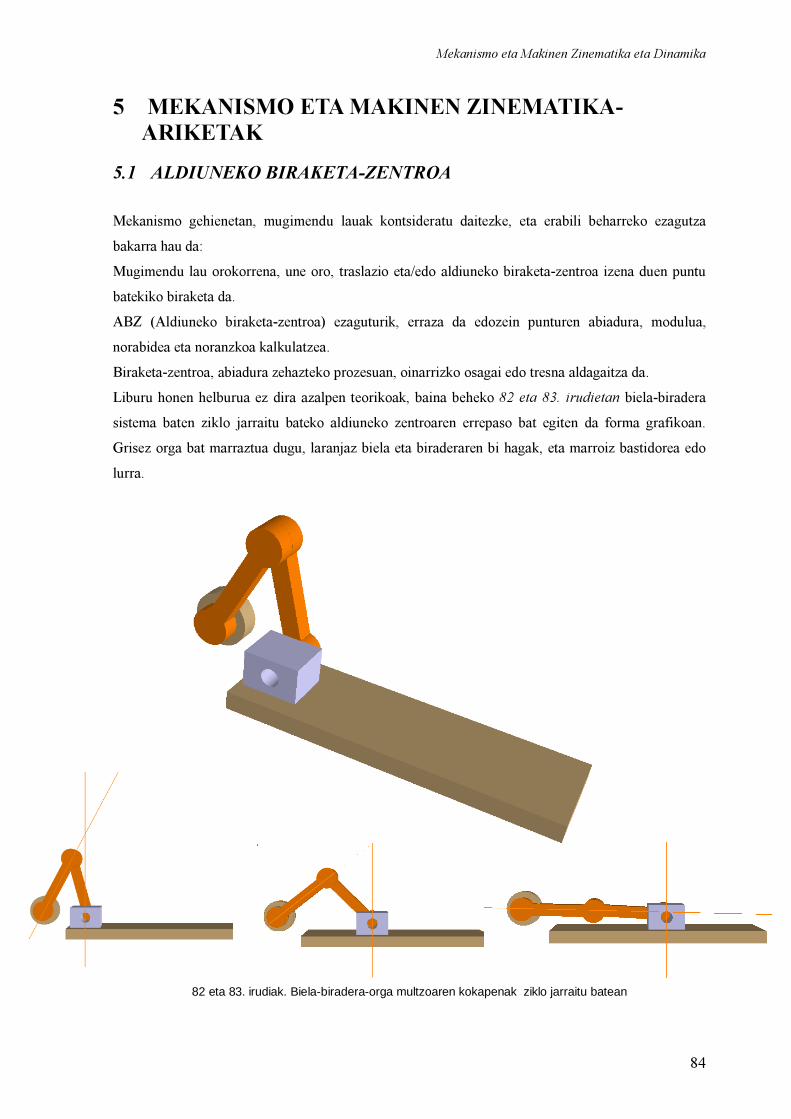
Mekanismo eta Makinen Zinematika eta Dinamika
84
5 MEKANISMO ETA MAKINEN ZINEMATIKA-ARIKETAK
5.1 ALDIUNEKO BIRAKETA-ZENTROA Mekanismo gehienetan, mugimendu lauak kontsideratu daitezke, eta erabili beharreko ezagutza bakarra hau da: Mugimendu lau orokorrena, une oro, traslazio eta/edo aldiuneko biraketa-zentroa izena duen puntu batekiko biraketa da. ABZ (Aldiuneko biraketa-zentroa) ezaguturik, erraza da edozein punturen abiadura, modulua, norabidea eta noranzkoa kalkulatzea. Biraketa-zentroa, abiadura zehazteko prozesuan, oinarrizko osagai edo tresna aldagaitza da. Liburu honen helburua ez dira azalpen teorikoak, baina beheko 82 eta 83. irudietan biela-biradera sistema baten ziklo jarraitu bateko aldiuneko zentroaren errepaso bat egiten da forma grafikoan. Grisez orga bat marraztua dugu, laranjaz biela eta biraderaren bi hagak, eta marroiz bastidorea edo lurra.
82 eta 83. irudiak. Biela-biradera-orga multzoaren kokapenak ziklo jarraitu batean

Mekanismo eta Makinen Zinematika eta Dinamika
85
Biela-biradera-orga sistema batean, mugimenduaren hiru egoera ezberdinetan ikus daiteke nola aldiuneko biraketa-zentroa tokitik aldatuz dihoan; hori geometriaren kokapen berriaren ondorio da. Ondorioz, une bakoitzerako abiadura lineal eta angeluarrak ere aldatuko zaizkigu. Argi dago aldiuneko biraketa-zentroen kokapena bi lerroen ebaketa-puntuan izango dela.
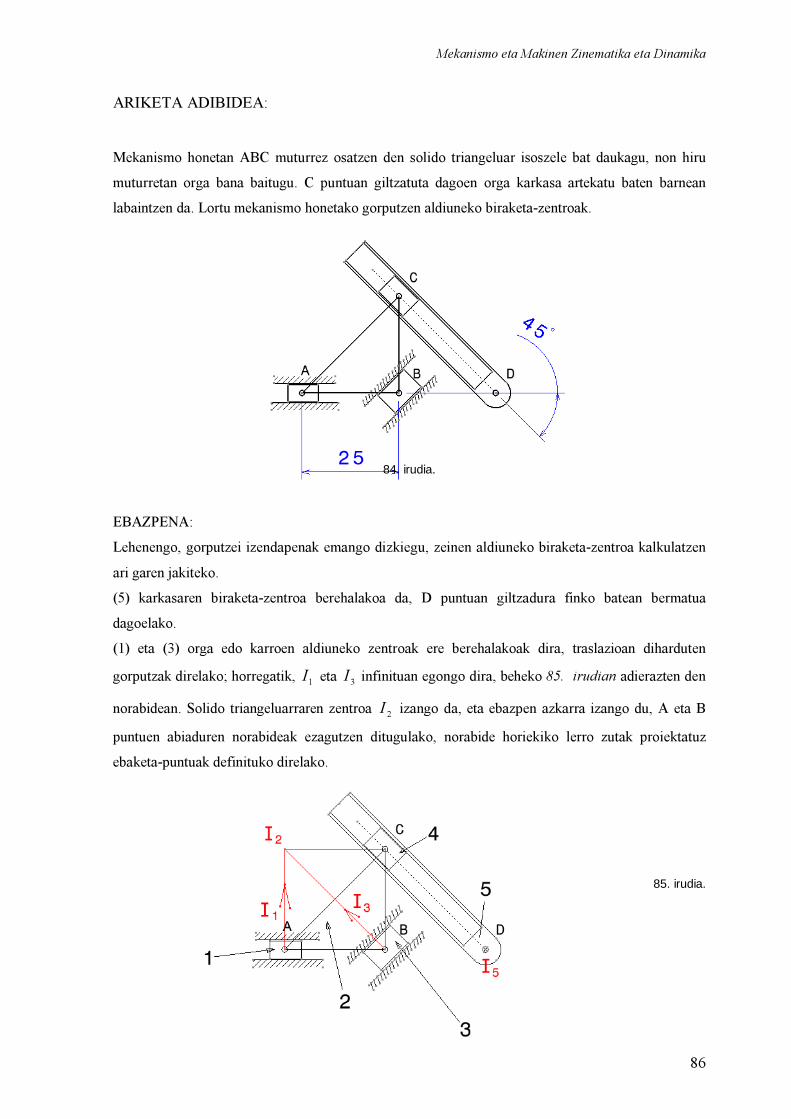
Mekanismo eta Makinen Zinematika eta Dinamika
86
ARIKETA ADIBIDEA: Mekanismo honetan ABC muturrez osatzen den solido triangeluar isoszele bat daukagu, non hiru muturretan orga bana baitugu. C puntuan giltzatuta dagoen orga karkasa artekatu baten barnean labaintzen da. Lortu mekanismo honetako gorputzen aldiuneko biraketa-zentroak.
84. irudia. EBAZPENA: Lehenengo, gorputzei izendapenak emango dizkiegu, zeinen aldiuneko biraketa-zentroa kalkulatzen ari garen jakiteko. (5) karkasaren biraketa-zentroa berehalakoa da, D puntuan giltzadura finko batean bermatua dagoelako. (1) eta (3) orga edo karroen aldiuneko zentroak ere berehalakoak dira, traslazioan diharduten gorputzak direlako; horregatik, 1I eta 3I infinituan egongo dira, beheko 85. irudian adierazten den norabidean. Solido triangeluarraren zentroa 2I izango da, eta ebazpen azkarra izango du, A eta B puntuen abiaduren norabideak ezagutzen ditugulako, norabide horiekiko lerro zutak proiektatuz ebaketa-puntuak definituko direlako.
85. irudia.
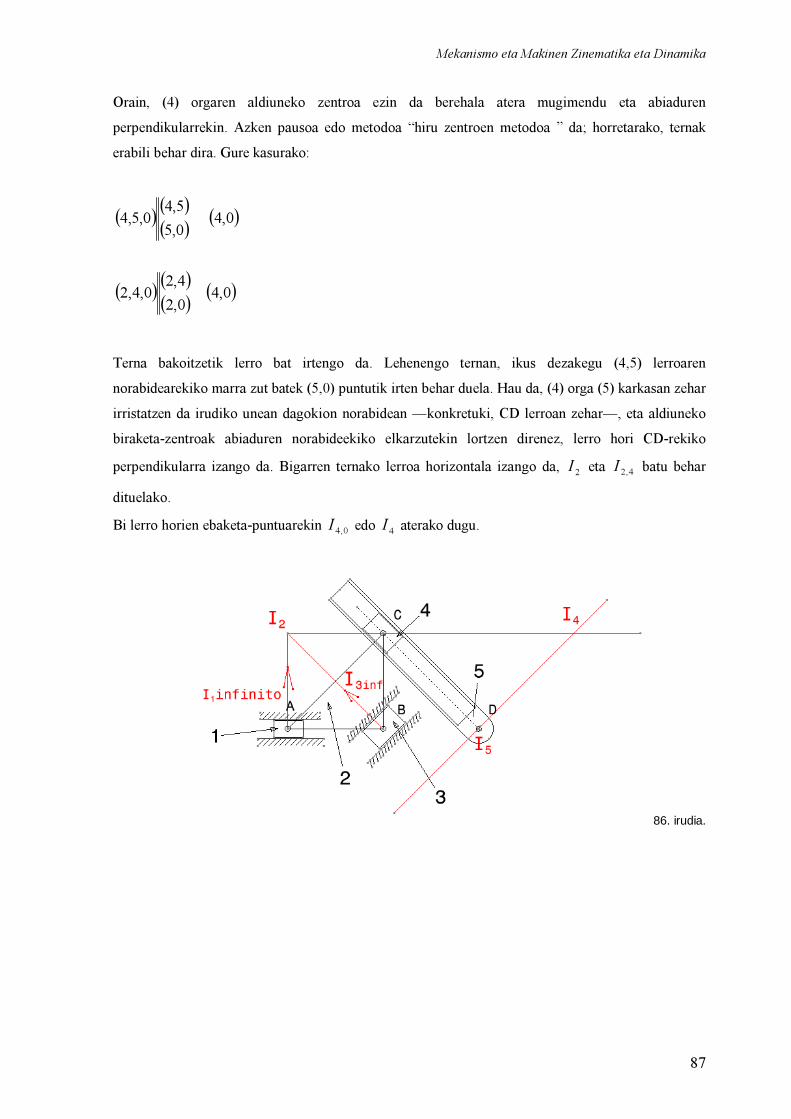
Mekanismo eta Makinen Zinematika eta Dinamika
87
Orain, (4) orgaren aldiuneko zentroa ezin da berehala atera mugimendu eta abiaduren perpendikularrekin. Azken pausoa edo metodoa “hiru zentroen metodoa ” da; horretarako, ternak erabili behar dira. Gure kasurako: ( ) ( )
( ) ( )
( ) ( )( ) ( )0,40,2
4,20,4,2
0,40,55,40,5,4
Terna bakoitzetik lerro bat irtengo da. Lehenengo ternan, ikus dezakegu (4,5) lerroaren norabidearekiko marra zut batek (5,0) puntutik irten behar duela. Hau da, (4) orga (5) karkasan zehar irristatzen da irudiko unean dagokion norabidean —konkretuki, CD lerroan zehar—, eta aldiuneko biraketa-zentroak abiaduren norabideekiko elkarzutekin lortzen direnez, lerro hori CD-rekiko perpendikularra izango da. Bigarren ternako lerroa horizontala izango da, 2I eta 4,2I batu behar dituelako. Bi lerro horien ebaketa-puntuarekin 0,4I edo 4I aterako dugu.
86. irudia.
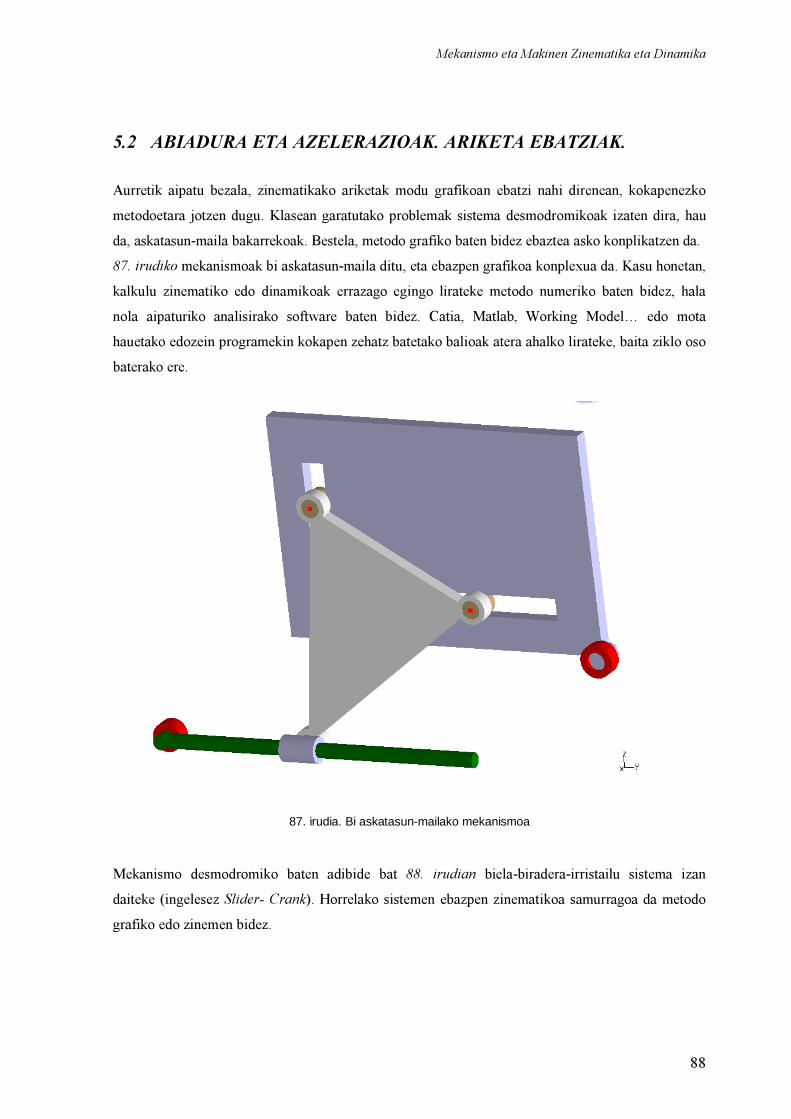
Mekanismo eta Makinen Zinematika eta Dinamika
88
5.2 ABIADURA ETA AZELERAZIOAK. ARIKETA EBATZIAK. Aurretik aipatu bezala, zinematikako ariketak modu grafikoan ebatzi nahi direnean, kokapenezko metodoetara jotzen dugu. Klasean garatutako problemak sistema desmodromikoak izaten dira, hau da, askatasun-maila bakarrekoak. Bestela, metodo grafiko baten bidez ebaztea asko konplikatzen da. 87. irudiko mekanismoak bi askatasun-maila ditu, eta ebazpen grafikoa konplexua da. Kasu honetan, kalkulu zinematiko edo dinamikoak errazago egingo lirateke metodo numeriko baten bidez, hala nola aipaturiko analisirako software baten bidez. Catia, Matlab, Working Model… edo mota hauetako edozein programekin kokapen zehatz batetako balioak atera ahalko lirateke, baita ziklo oso baterako ere.
87. irudia. Bi askatasun-mailako mekanismoa Mekanismo desmodromiko baten adibide bat 88. irudian biela-biradera-irristailu sistema izan daiteke (ingelesez Slider- Crank). Horrelako sistemen ebazpen zinematikoa samurragoa da metodo grafiko edo zinemen bidez.
Mekanismo eta Makinen Zinematika eta Dinamika
89
88 eta 89. irudiak.Biela-biradera-irristailu mekanismoa.

Mekanismo eta Makinen Zinematika eta Dinamika
90
ARIKETA EBATZIAK 1. MOTOR BATEN ZILINDROA
Motor baten zilindro baten mugimendu mekanikoa biela batek, birabarki batek eta pistoi
batek bideratzen dute. Sistema horren eskema zinematiko baliokidea biela, biradera eta orga izan daitezke, 90. irudian adierazten den bezala.
90. irudia.
Demagun auto baten motorra erralenti-unean dagoela eta 850 bira/min-ko biraketa-abiadura duela ezkerrerantz. Gure automobilaren motorreko biela 20 cm-koa da, eta biraderarena haren erdia dela joko da. Irudian adierazten den unean θ = 20º dela kontuan izanik, zehaztu B puntuaren abiadura eta azelerazioa. EBAZPENA:
Lehenengo, ω-ren unitateak Sistema Internazionaleko (SI) unitateetara pasatuko ditugu, eta haren balioa srad /89
602850 ≈=π
ω izango da. Mekanismoaren uneko kalkulu geometrikoa eginez, birabarkiaren lerro eszentrikoaren edo
biraderaren neurria lortuko dugu sinuaren teorema erabiliz. Ohartu behar da mekanismoaren neurri fisikoen eskala
51=ek dela.
º16.43º20sinsin
=⇒= ββOAAB
Eta abiadura angeluarra ezagutzen dugunez, A puntuaren abiadura lineala berehala lor daiteke:
smcmsradOAvA /9.810/89 =⋅=⋅=ωr
Zinemaren edo ebazpen grafikoaren bitartez eta haien antzekotasun-propietatearen
bitartez, Bvr lor dezakegu, pistoiaren norabidea horizontalki behartua dagoela jakinik. Beharbada,

Mekanismo eta Makinen Zinematika eta Dinamika
91
8 98 4 . 7 1
6 9. 1
1vB -rennorabidea
AB
vA
O
komeni da gogoratzea: «Abiaduren zinema eta mekanismo bateko gorputzak antzekoak dira ω-ren noranzkoan 90º biratuta»; lerro zut horrek abiadura erlatiboaren norabidea markatzen du.
91. irudia. Abiaduren eskala
2001
=vk izanik, abiaduren zinemaren (91. irudia) neurketatik
smvB /47,8=r aterako zaigu, AB lerroarekiko zutak Bvr -ren norabidea mozten duen tokian bektore
horren amaierako muga kokatuko duelako. Eta A
ABB vvv
rrr
+= batura bektorialetik grafikoaren konposizioa egin dezakegunez, A
Bvr bektorea
guztiz definituko dugu; haren modulua 6,911 m/s2 da. Zinemen bitarteko azelerazioen emaitza ere nahiko azkar lor daiteke, lehenengo bielaren eta birabarkiaren A ebaketa-puntuaren azelerazioa kalkulatuz eta, ondoren, B puntuarena aurreko horrekin alderatuz. A puntuaren azelerazioa izango da haren normal absolutuaren eta tangentzial absolutuaren batura, eta, OA biraderaren ω1 konstantea denez, 1α azelerazio angeluarra nulutzat hartuko dugu, eta baita ere tangentzial absolutua, ondorioz.
AAA tna /+=r
rr Hala, A puntuaren azelerazioa:
222
21 /1,792/210,791089 smscmcm
sradOAaA ==⋅
=⋅= ω
Orain, B puntua A-rekin konparatuz:
AABB aaarrr
+= / Osagai edo bektoreak deskonposatuz:
AABABB atnar
rrr
++= //
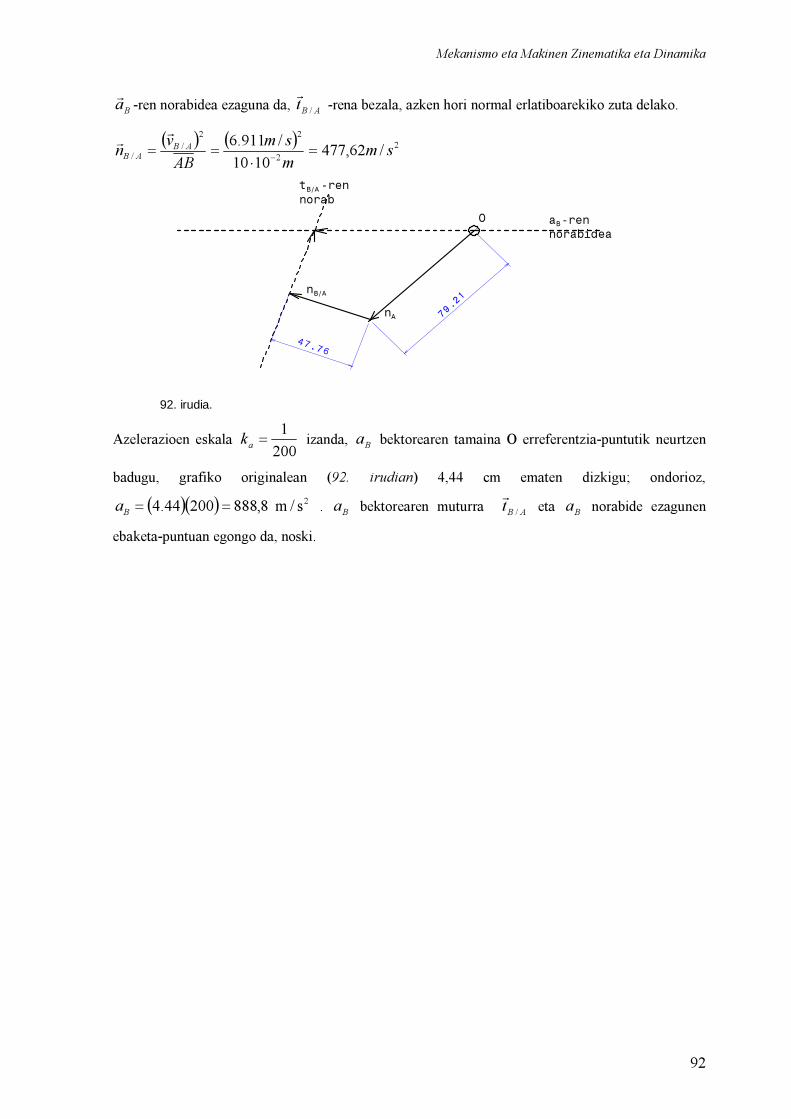
Mekanismo eta Makinen Zinematika eta Dinamika
92
7 9. 2
1
4 7 . 7 6
O
nB/A
nA
aB-rennorabidea
tB/A-rennorab
Bar -ren norabidea ezaguna da, ABt /
r -rena bezala, azken hori normal erlatiboarekiko zuta delako. ( ) ( ) 2
2
22/
/ /62,4771010/911.6 smmsm
ABvn AB
AB =⋅
==−
r
r
92. irudia. Azelerazioen eskala
2001
=ak izanda, Ba bektorearen tamaina O erreferentzia-puntutik neurtzen badugu, grafiko originalean (92. irudian) 4,44 cm ematen dizkigu; ondorioz,
( )( ) 2s/m8,88820044.4 ==Ba . Ba bektorearen muturra ABt /r eta Ba norabide ezagunen
ebaketa-puntuan egongo da, noski.
Mekanismo eta Makinen Zinematika eta Dinamika
93
93. irudia.
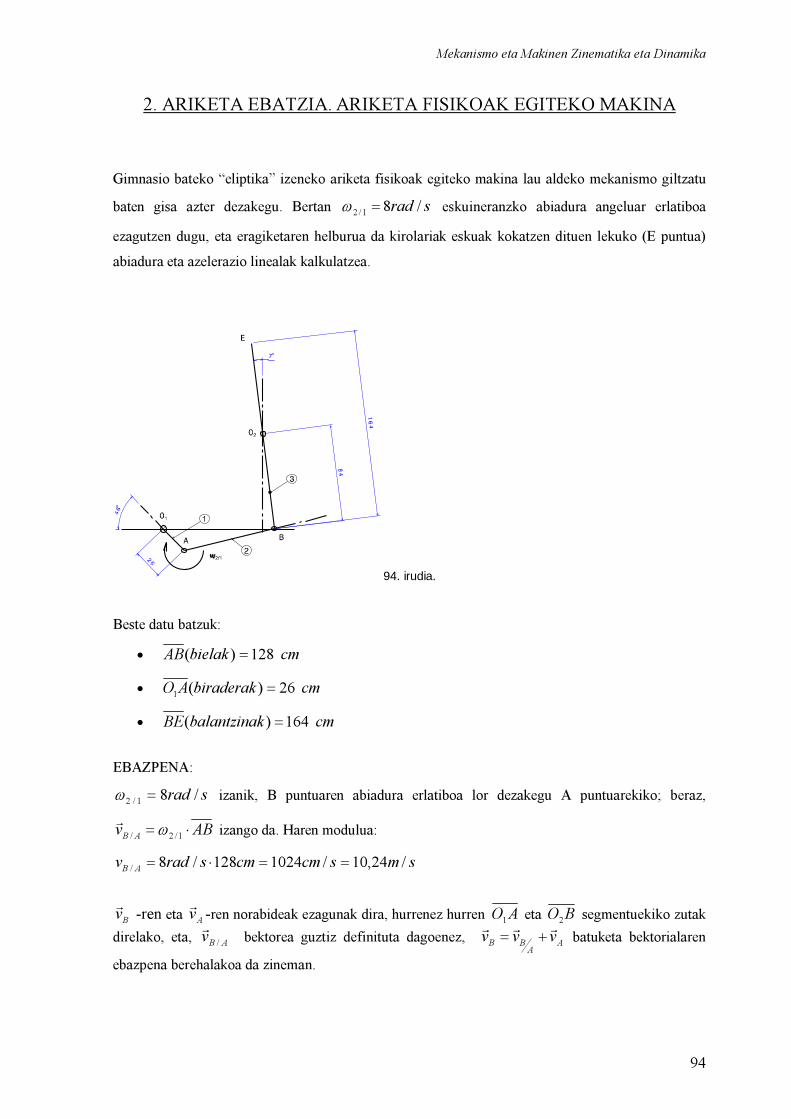
Mekanismo eta Makinen Zinematika eta Dinamika
94
2. ARIKETA EBATZIA. ARIKETA FISIKOAK EGITEKO MAKINA Gimnasio bateko “eliptika” izeneko ariketa fisikoak egiteko makina lau aldeko mekanismo giltzatu baten gisa azter dezakegu. Bertan srad /81/2 =ω eskuineranzko abiadura angeluar erlatiboa ezagutzen dugu, eta eragiketaren helburua da kirolariak eskuak kokatzen dituen lekuko (E puntua) abiadura eta azelerazio linealak kalkulatzea.
94. irudia. Beste datu batzuk: • cmbielakAB 128)( = • cmbiraderakAO 26)(1 = • cmkbalantzinaBE 164)( =
EBAZPENA:
srad /81/2 =ω izanik, B puntuaren abiadura erlatiboa lor dezakegu A puntuarekiko; beraz, ABv AB ⋅= 1/2/ ω
r izango da. Haren modulua: smscmcmsradv AB /24,10/1024128/8/ ==⋅=
Bvr -ren eta Av
r -ren norabideak ezagunak dira, hurrenez hurren AO1 eta BO2 segmentuekiko zutak direlako, eta, ABv /
r bektorea guztiz definituta dagoenez, AA
BB vvvrrr
+= batuketa bektorialaren ebazpena berehalakoa da zineman.
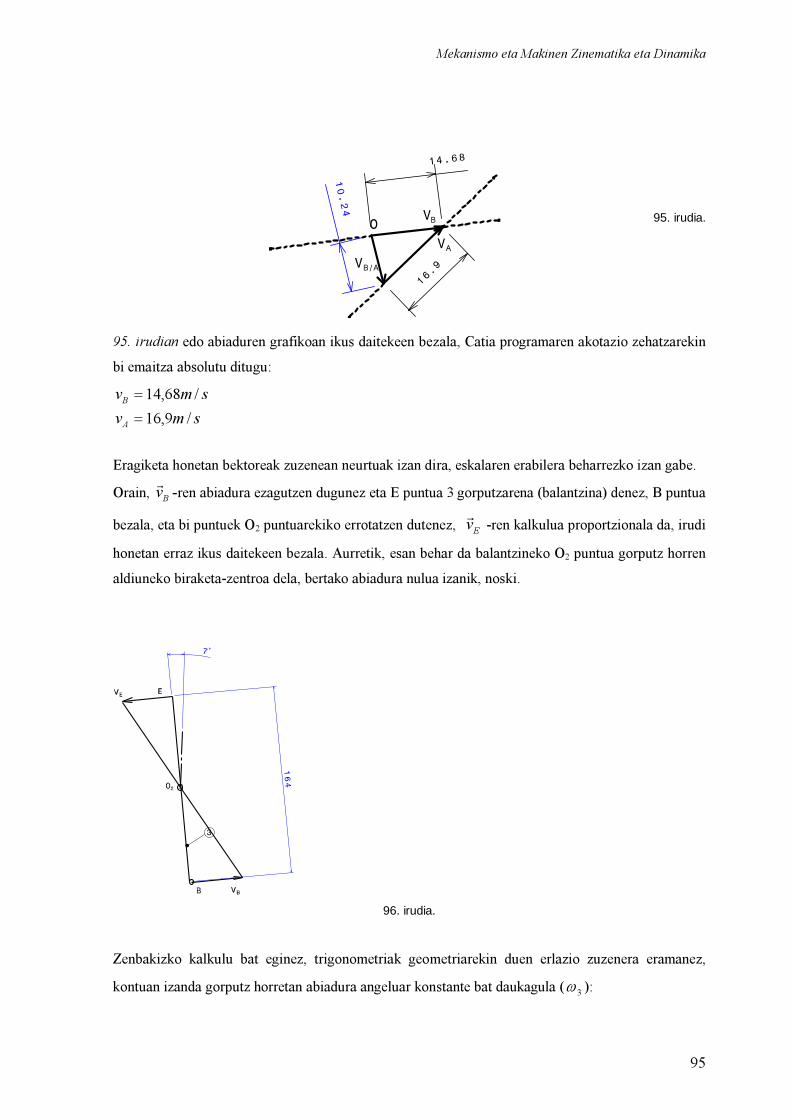
Mekanismo eta Makinen Zinematika eta Dinamika
95
10 .
2 4
1 4 . 6 8
1 6. 9
O
VB/A
VB
VA
95. irudia. 95. irudian edo abiaduren grafikoan ikus daitekeen bezala, Catia programaren akotazio zehatzarekin bi emaitza absolutu ditugu:
smv
smv
A
B
/9,16/68,14
=
=
Eragiketa honetan bektoreak zuzenean neurtuak izan dira, eskalaren erabilera beharrezko izan gabe. Orain, Bv
r -ren abiadura ezagutzen dugunez eta E puntua 3 gorputzarena (balantzina) denez, B puntua bezala, eta bi puntuek O2 puntuarekiko errotatzen dutenez, Ev
r -ren kalkulua proportzionala da, irudi honetan erraz ikus daitekeen bezala. Aurretik, esan behar da balantzineko O2 puntua gorputz horren aldiuneko biraketa-zentroa dela, bertako abiadura nulua izanik, noski.
96. irudia.
Zenbakizko kalkulu bat eginez, trigonometriak geometriarekin duen erlazio zuzenera eramanez, kontuan izanda gorputz horretan abiadura angeluar konstante bat daukagula ( 3ω ):

Mekanismo eta Makinen Zinematika eta Dinamika
96
EOv
BOv EB
22
rr
=
Orain, Evr askatuz: smvE /98,13=r
Eta aurreko ekuazioa baliatuz: srad /47,173 =ω Azelerazioei dagokienez, hasiera batean 1/2ω ezagutuz, ohartu gaitezke ABn /
r normal erlatiboa berehala kalkula dezakegula:
( ) ( ) 22221/2/ /92,81/8192128/8 smscmcmsradABn AB ==⋅=⋅= ω
A eta B puntuak “2” gorputz berekoak direnez:
AABB aaarrr
+= / Osagai normal eta tangentzialak kontuan hartuz:
AAABABBB tntntnr
rr
rr
r ++/+=+ // Aurreko ekuazioan deskonposatutako osagaietatik ABt /
r nulua kontsideratuko dugu, zeren problemaren enuntziatuan abiadura angeluar erlatibo konstante bat ematen baita; ondorioz, azelerazio angeluar erlatiboa nulua izango da, eta baita ABt /
r ere. Normal guztiak kalkula daitezke, eta azpimarratuta dauden B eta A puntuen tangenteen norabideak soilik direnez ezagunak, zinemaren adierazpenera jo beharko dugu, azelerazio guztiak lortzeko.
ABn /r jada kalkulatuta dago, eta ( ) ( ) 2
2
2
2
2
/55,2561084/68,14 smmsm
BOvn B
B =⋅
==−
r
r eta ( ) ( ) 2
2
1
2
/5,109826,0/9,16 smmsm
AOvn A
A ===
r
r dira.

Mekanismo eta Makinen Zinematika eta Dinamika
97
nB/A
nB
nA
tB -ren norabidea
tA- ren norabidea
nB
97. irudia. Grafikoan (97. irudian) ikusten den bezala, Bn
r bektorearen muturra Atr eta Bt
r tangenteen norabideen ebaketa-puntuan egongo da. Horrela, O jatorri absolututik eskala egoki batean neurtuta
Bar - ren emaitza aurkituko dugu, hau da:
2/29,1586 smaB =r
Balantzinaren edo “3” gorputzaren azelerazioen poloa O2 giltzadura finkoan dagoenez, E puntuaren azelerazioa erraz kalkula dezakegu. Hagaren uneko kokapena ezaguna denez, eta analisi zinematiko guztietan azelerazioen zinemaren eta gorputzen kokapenaren artean antzekotasunaren propietatea betetzen denez, Ea
r -ren kalkulua berehalakoa da.
98. irudia.
Azelerazioen zinemaren eta mekanismoaren arteko antzekotasunaren erlazio teorikoa gogoratzea komeni da, aurreko adierazpen eta xehetasunak ulertzeko: «Azelerazioen zinema mekanismoaren gorputzaren antzekoa da, baina (180º-α) gradu biratuta azelerazio angeluarraren noranzkoan».

Mekanismo eta Makinen Zinematika eta Dinamika
98
Irudian ikusi bezala, gure kasu honetan α = 80,78º, eta, desberdintasun sinbolikoari antzemateko, esango dugu azelerazio angeluarra 3ε dela eta ezkerreranzko noranzkoa hartzen duela O2 poloarekiko, haren azelerazioaren balioa zero baita; horregatik da erreferentzia nagusia azelerazioen grafikoan. Bi modutara kalkula dezakegu Ea
r -ren balioa: lehenengo bektorea Catia diseinu-programarekin kota neurtuz, eta bigarrena ondorengo zenbakizko erlazio arruntarekin. Bi kasuetan, bata bestearen egiaztapena izan daiteke. Azelerazioen poloan oinarrituz eta “3” gorputzaren azelerazio angeluar konstante batekin:
BOa
EOakte BE
223
rr
===ε Bektorialki:
BOEOaa BE2
2rr
=
Moduluaren emaitza:
2
2
2 /78,1510848075,1586 sm
BOEOaa BE ===
rr Azelerazioen zineman finkatuta konklusio bat aipatzekotan esan daiteke, nahiz eta normal erlatibo txiki bat izan, normal eta azelerazio absolutu altuak lor ditzakegula mekanismoaren geometriaren ondorioz.
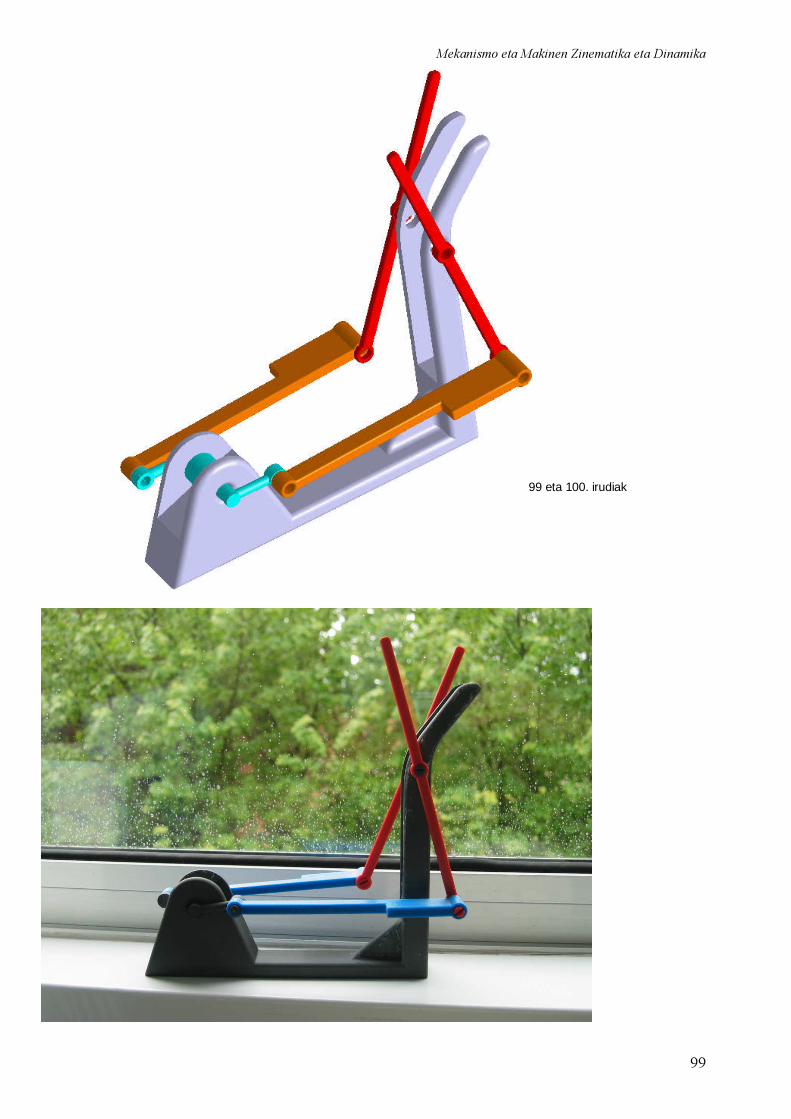
Mekanismo eta Makinen Zinematika eta Dinamika
99
99 eta 100. irudiak
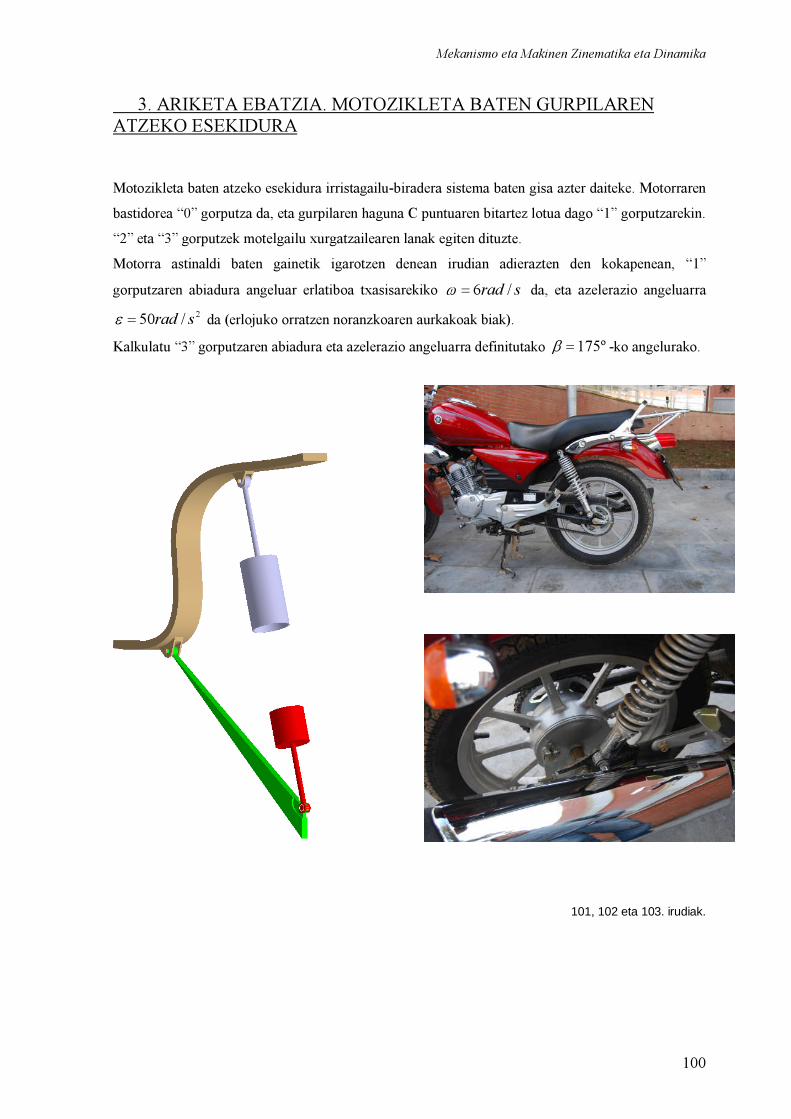
Mekanismo eta Makinen Zinematika eta Dinamika
100
3. ARIKETA EBATZIA. MOTOZIKLETA BATEN GURPILAREN ATZEKO ESEKIDURA Motozikleta baten atzeko esekidura irristagailu-biradera sistema baten gisa azter daiteke. Motorraren bastidorea “0” gorputza da, eta gurpilaren haguna C puntuaren bitartez lotua dago “1” gorputzarekin. “2” eta “3” gorputzek motelgailu xurgatzailearen lanak egiten dituzte. Motorra astinaldi baten gainetik igarotzen denean irudian adierazten den kokapenean, “1” gorputzaren abiadura angeluar erlatiboa txasisarekiko srad /6=ω da, eta azelerazio angeluarra
2/50 srad=ε da (erlojuko orratzen noranzkoaren aurkakoak biak). Kalkulatu “3” gorputzaren abiadura eta azelerazio angeluarra definitutako º175=β -ko angelurako.
101, 102 eta 103. irudiak.
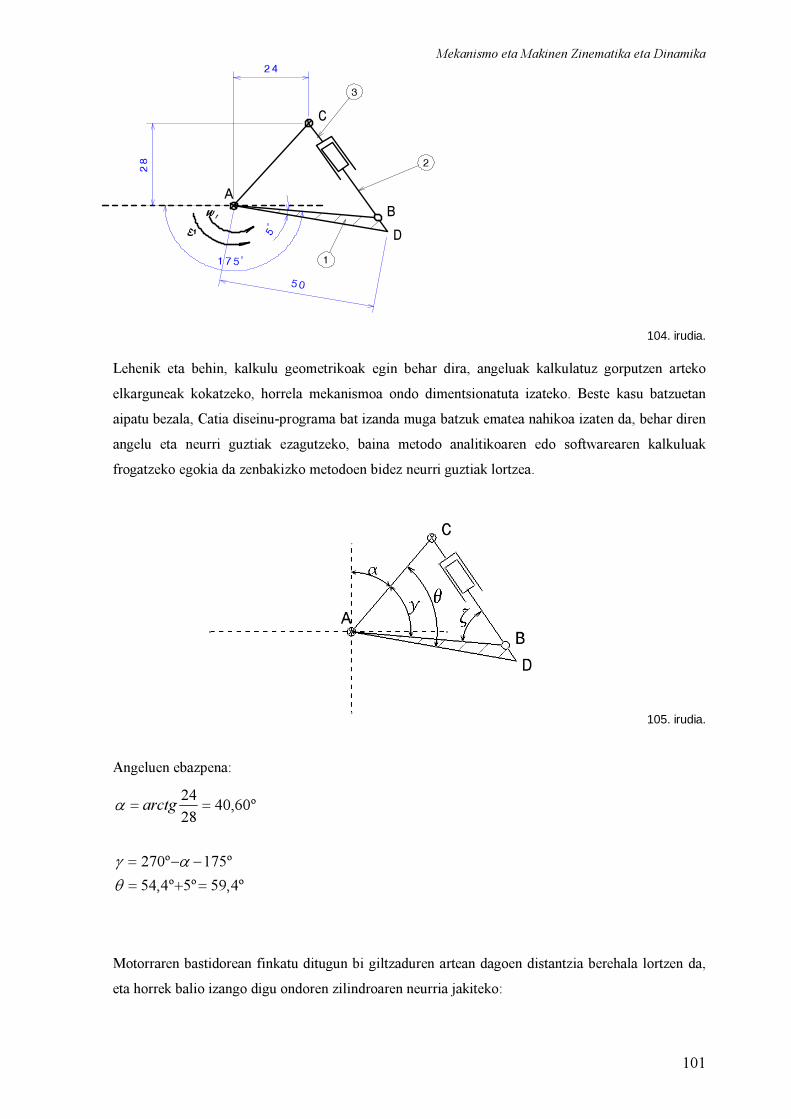
Mekanismo eta Makinen Zinematika eta Dinamika
101
28
24
1 7 55
5 0
C
DB
A
3
1
2
E1W 1
104. irudia. Lehenik eta behin, kalkulu geometrikoak egin behar dira, angeluak kalkulatuz gorputzen arteko elkarguneak kokatzeko, horrela mekanismoa ondo dimentsionatuta izateko. Beste kasu batzuetan aipatu bezala, Catia diseinu-programa bat izanda muga batzuk ematea nahikoa izaten da, behar diren angelu eta neurri guztiak ezagutzeko, baina metodo analitikoaren edo softwarearen kalkuluak frogatzeko egokia da zenbakizko metodoen bidez neurri guztiak lortzea.
105. irudia. Angeluen ebazpena:
º4,59º5º4,54º175º270
º60,402824
=+=
−−=
==
θαγ
α arctg
Motorraren bastidorean finkatu ditugun bi giltzaduren artean dagoen distantzia berehala lortzen da, eta horrek balio izango digu ondoren zilindroaren neurria jakiteko:
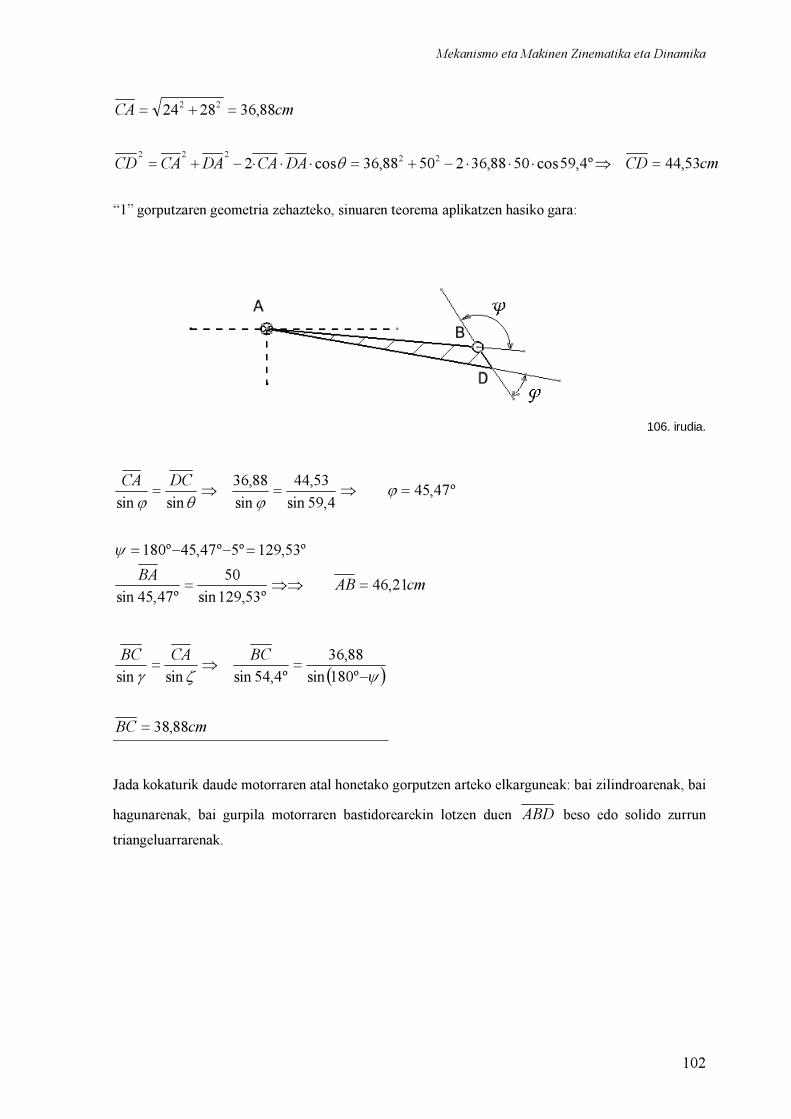
Mekanismo eta Makinen Zinematika eta Dinamika
102
cmCDDACADACACD
cmCA
53,44º4,59cos5088,3625088,36cos2
88,362824
22222
22
=⇒⋅⋅⋅−+=⋅⋅⋅−+=
=+=
θ “1” gorputzaren geometria zehazteko, sinuaren teorema aplikatzen hasiko gara:
106. irudia.
º53,129º5º47,45º180
º47,454,59sin53,44
sin88,36
sinsin
=−−=
=⇒=⇒=
ψ
ϕϕθϕDCCA
cmABBA 21,46º53,129sin50
º47,45sin =⇒⇒=
( )
cmBC
BCCABC
88,38
º180sin88,36
º4,54sinsinsin
=
−=⇒= ψζγ
Jada kokaturik daude motorraren atal honetako gorputzen arteko elkarguneak: bai zilindroarenak, bai hagunarenak, bai gurpila motorraren bastidorearekin lotzen duen ABD beso edo solido zurrun triangeluarrarenak.
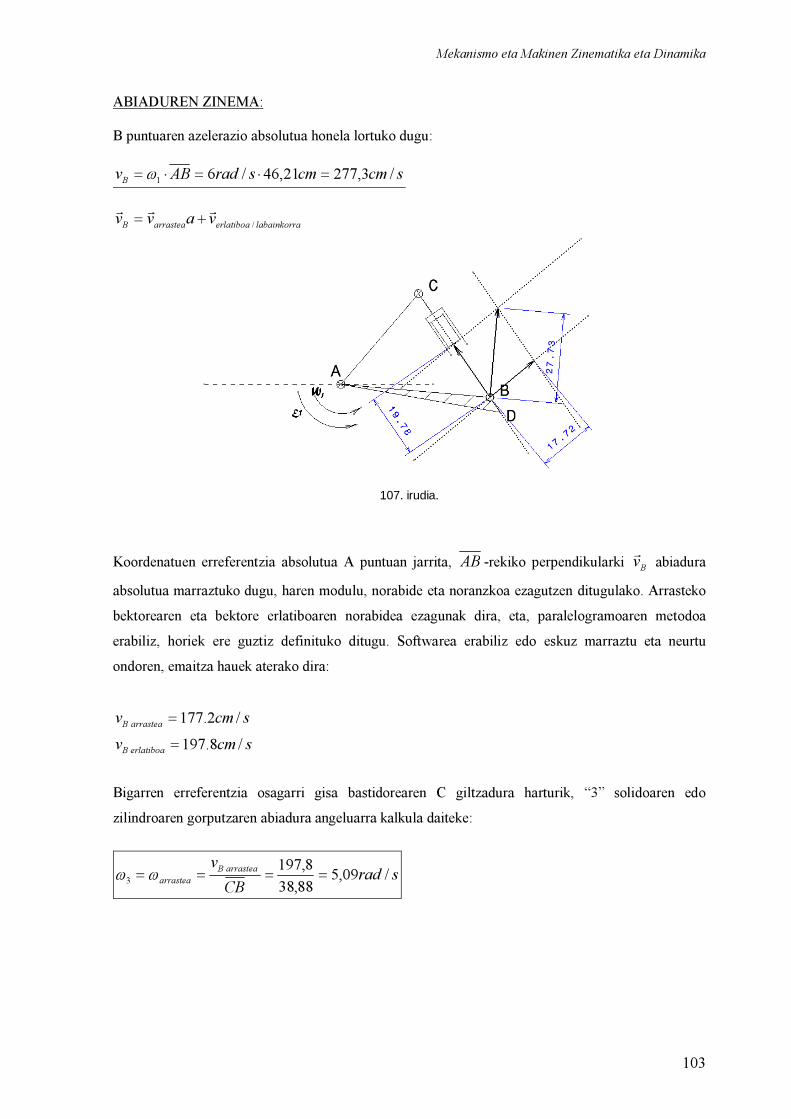
Mekanismo eta Makinen Zinematika eta Dinamika
103
ABIADUREN ZINEMA: B puntuaren azelerazio absolutua honela lortuko dugu:
scmcmsradABvB /3,27721,46/61 =⋅=⋅= ω
alabainkorrerlatiboaarrasteaB vavv /rrr
+=
107. irudia.
Koordenatuen erreferentzia absolutua A puntuan jarrita, AB -rekiko perpendikularki Bvr abiadura
absolutua marraztuko dugu, haren modulu, norabide eta noranzkoa ezagutzen ditugulako. Arrasteko bektorearen eta bektore erlatiboaren norabidea ezagunak dira, eta, paralelogramoaren metodoa erabiliz, horiek ere guztiz definituko ditugu. Softwarea erabiliz edo eskuz marraztu eta neurtu ondoren, emaitza hauek aterako dira:
scmv
scmv
erlatiboaB
arrasteaB
/8.197/2.177
=
=
Bigarren erreferentzia osagarri gisa bastidorearen C giltzadura harturik, “3” solidoaren edo zilindroaren gorputzaren abiadura angeluarra kalkula daiteke:
sradCB
v arrasteaBarrastea /09,588,38
8,1973 ==== ωω

Mekanismo eta Makinen Zinematika eta Dinamika
104
AZELERAZIOEN ZINEMA: Sarrerako datu zinematikoak A puntuan daudenez, B-ren azelerazioak bertatik hartuko dira berehala, non
( )
=⋅==⋅=⋅=2
1
2221
/10,23/63,1621,46/6
smABtsmcmsradABna
B
BB
ε
ωr
r
ar
Ukipen labainkor bat daukagunez zilindroaren enboloaren eta karkasaren artean, B-ren azelerazio absolutua hiru faktoreren arabera adieraziko da:
corioliserlatiboaBarrasteaBB aaaarrrr
++= Arrasteko azelerazioak osagai normala eta tangentziala izango ditu, eta haren mugimendua C puntuaren ikuspuntutik hautemango da.
( ) −⊥=
=⋅=⋅=rekikonezagunanorabideat
smcmsradCBnarrasteaBarrasteaB
arrasteaB
,/07,1088,38/09,5 222
3r
r
ω
Coriolis-en azelerazioaren modulu eta emaitza grafikoa (108. irudia), ondoren:
23 /14,208,19709,5222 smvv erlatiboaBerlatiboaBarrastea =⋅⋅=⋅⋅=⋅⋅ ωω
108. irudia. Azelerazio erlatiboaren norabidea, abiadurarena bezala, pistoiaren mugimendu labainkorraren norabide tangentzial berekoa da; hau da, paraleloa da CB lerroarekiko. Orain, azkenik, bektoreen lerroak marraztu azelerazioen grafikoan (109. irudian).

Mekanismo eta Makinen Zinematika eta Dinamika
105
Azelerazioen zinema osoa:
109. irudia. Zinemaren eskala aintzat harturik, interesatzen zaigun arrasteaBt
r
bektorea grafikotik neurtzen badugu:
2/02,22 smt arrasteaB =r
Ondorioz, bilatzen ari garen “3” gorputzaren azelerazioa:
22
2
3 /63,561088,38/02,22 sradmsm
CBt arrasteaB
=⋅
==−
ε
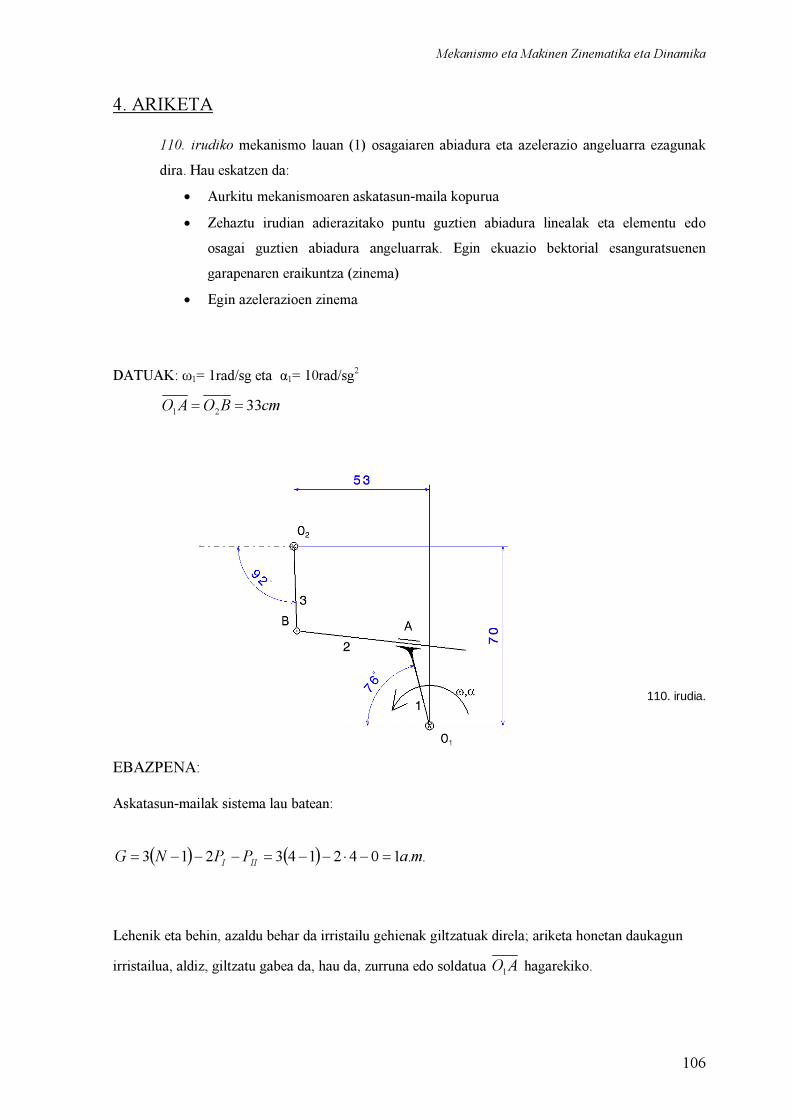
Mekanismo eta Makinen Zinematika eta Dinamika
106
4. ARIKETA
110. irudiko mekanismo lauan (1) osagaiaren abiadura eta azelerazio angeluarra ezagunak dira. Hau eskatzen da: • Aurkitu mekanismoaren askatasun-maila kopurua • Zehaztu irudian adierazitako puntu guztien abiadura linealak eta elementu edo
osagai guztien abiadura angeluarrak. Egin ekuazio bektorial esanguratsuenen garapenaren eraikuntza (zinema)
• Egin azelerazioen zinema DATUAK: ω1= 1rad/sg eta α1= 10rad/sg2
cmBOAO 3321 ==
110. irudia. EBAZPENA: Askatasun-mailak sistema lau batean:
( ) ( ) ..1042143213 maPPNG III =−⋅−−=−−−= Lehenik eta behin, azaldu behar da irristailu gehienak giltzatuak direla; ariketa honetan daukagun irristailua, aldiz, giltzatu gabea da, hau da, zurruna edo soldatua AO1 hagarekiko.

Mekanismo eta Makinen Zinematika eta Dinamika
107
Horrek begi-bistako ondorio bat dakar: (1) eta (2) gorputzen abiadura eta azelerazio angeluarrak berdinak dira. Hau da:
21
21
αα
ωω
=
=
A puntuaren abiadura:
scmcmsradAOvA /3333/11 =⋅=⋅=ω A puntu edo irristailuko labainketa 1. ekuazioan modu bektorialean adierazita dago, eta 2. ekuazioan gorputz bereko bi puntuen abiadurak konparatzen dira. Ohartarazi behar da A puntua AO1 hagaren muturreko parte kontsideratzen dugula, batez ere arrasteko osagaia nondik datorren ulertzeko.
arrasteAalabainkorrerlatiboAabsolutuaA
AAA
vvv
vvv
rrr
rrr
+=
+=
/
22/11
(1.ekuazioa)
Eta bigarren ekuazioa:
22/
/
AABB
arrasteAarrasteABB
vvv
vvv
rrr
rrr
+=
+=
(2.ekuazioa)
Bi ekuazioak baturik:
12/2/12/112/ AABABAAABB vvvvedovvvv rrrrrrrr
+=+−+= A puntuaren abiadura absolutua kalkulatua dugu, eta B puntuaren abiadura eta 2/1Av
r -ren abiaduren norabideak ezagunak dira, baina zineman (111. irudian) zehazteke geratuko dira.
2/ ABvr -ren kalkulua:
( ) ( ) scmsradABv AB /15,44º14cos33º2cos3370º14sin33º2sin3353/1 222/ =−−+−−⋅=⋅=ω
r

Mekanismo eta Makinen Zinematika eta Dinamika
108
111. irudia Irudi honetan abiaduren eskala
21=VK denez:
scmvv BB /6,3692 ==
Beste modu azkarragoan ere kalkula daiteke:
112. irudia. Zuzenean A-ren arrasteko osagaiarekin erlazionatu beharrean, B puntua gorputz berekoa denez —kasu honetan, (2) gorputzekoa—, arrasteBv
r atera daiteke. B puntuaren abiadura:
arrasteBalabainkorrerlatiboBabsolutuaB vvvrrr
+= /
( ) ( )scmv
sradXBXOsradBOv
arrasteB
arrasteB
/71,63º2cos3370º2sin3353/1/1 2222
11
=
=⋅−+⋅−⋅=+⋅=⋅=r
r
ω

Mekanismo eta Makinen Zinematika eta Dinamika
109
113. irudia.
scmvv absolutuaBB /6,369== Ikus daiteke bi bide desberdinetatik lortutako abiadurek emaitza bera ematen dutela. Lehenengo kasuan, A puntuaren arrasteko azelerazioa ere kalkulatzen da. AZELERAZIOAK: A puntuari jaramon egin gabe:
CoriokisBarrasteBalabainkorrerlatiboBabsolutuaB aaaarrrr
++= /
CoriokisBarrasteBarrasteBalabainkorrerlatiboBabsolutuaBabsolutuaB atnatnr
rrr
rr
+++=+ /
erlBalabainkorrerlatiboBabsolutuaBabsolutuaB
erlBarrastealabainkorrerlatiboBabsolutuaBabsolutuaB
vBOBOatBO
v
vBOBOatBO
v
rrr
r
rrr
r
⋅⋅+⋅+⋅+=+
⋅⋅+⋅+⋅+=+
ωαω
ωαω
2
2
112
/2
112
/2
( ) ( ) 2
2
2
2
/52,139.433/6,369 scm
cmscm
BOv
n absolutuaBabsolutuaB ===
r
r ezaguna
absolutuaBtr ?
alabainkorrerlatiboBa /r ?
( ) 221
2 /71,6371,63/1 scmcmsradBOn arrasteB =⋅=⋅=ωr ezaguna
21 /1,63771,63/10 scmcmsradBOt arrasteB =⋅=⋅=α
r ezaguna 2/07,683/53,342/122 scmscmsradva erlBCoriokisB =⋅⋅=⋅⋅=
rr
ω ezaguna
6 .taula.
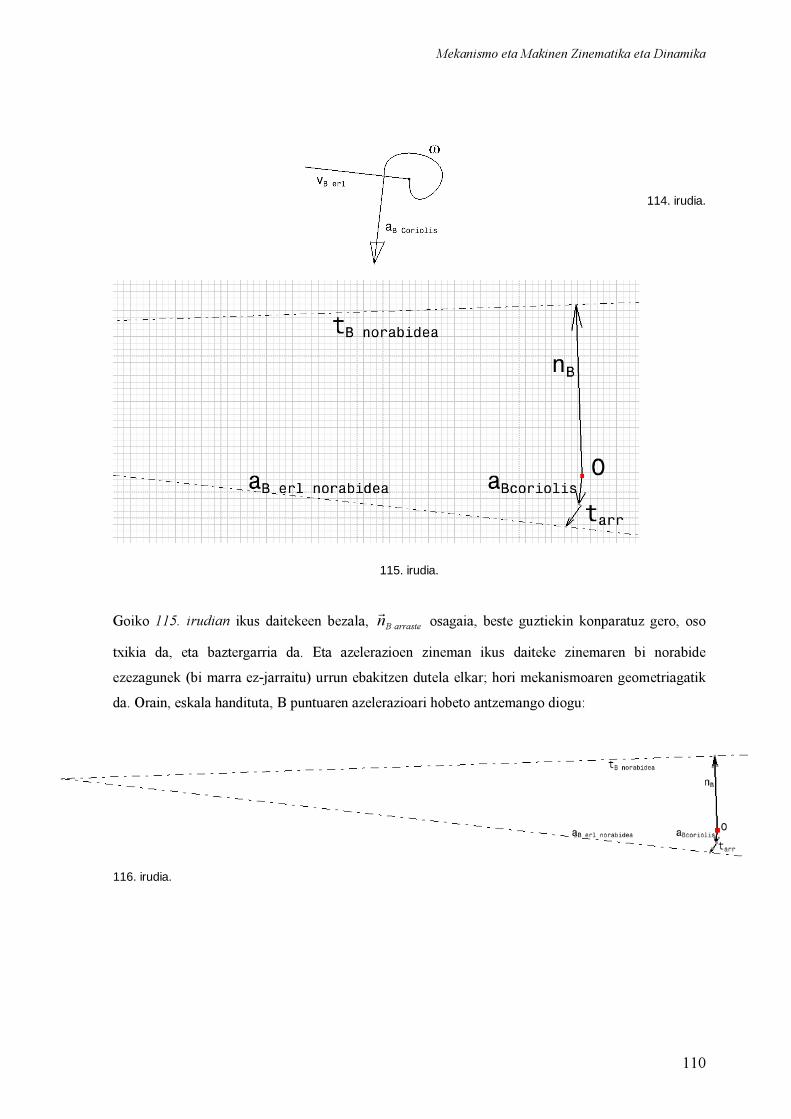
Mekanismo eta Makinen Zinematika eta Dinamika
110
114. irudia.
115. irudia. Goiko 115. irudian ikus daitekeen bezala, arrasteBn
r osagaia, beste guztiekin konparatuz gero, oso txikia da, eta baztergarria da. Eta azelerazioen zineman ikus daiteke zinemaren bi norabide ezezagunek (bi marra ez-jarraitu) urrun ebakitzen dutela elkar; hori mekanismoaren geometriagatik da. Orain, eskala handituta, B puntuaren azelerazioari hobeto antzemango diogu: 116. irudia.
Mekanismo eta Makinen Zinematika eta Dinamika
111
B puntuaren osagai absolutua O jatorritik lerro ez-jarraituen ebaketa-puntura joango da, eta haren modulua:
2/38,364 sma absolutuaB =r
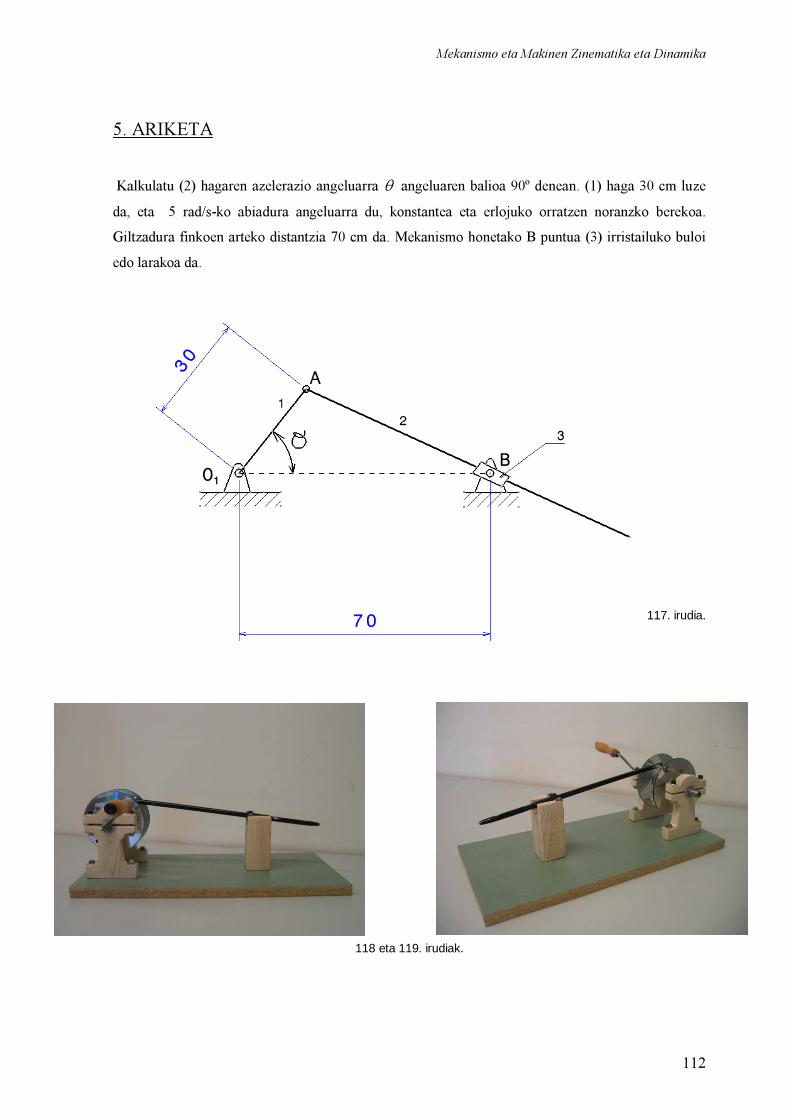
Mekanismo eta Makinen Zinematika eta Dinamika
112
5. ARIKETA Kalkulatu (2) hagaren azelerazio angeluarra θ angeluaren balioa 90º denean. (1) haga 30 cm luze da, eta 5 rad/s-ko abiadura angeluarra du, konstantea eta erlojuko orratzen noranzko berekoa. Giltzadura finkoen arteko distantzia 70 cm da. Mekanismo honetako B puntua (3) irristailuko buloi edo larakoa da.
117. irudia.
118 eta 119. irudiak.

Mekanismo eta Makinen Zinematika eta Dinamika
113
Avr bektorearen definizioa erraza eta berehalakoa da, guztiz defini daitekeena. Norabidea
AO1 -rekiko zuta da, eta modulua eta noranzkoaω -ak emango diguna:
scmcmsradAOvA /15030/51 =⋅=⋅=ωr 120. irudia. Orain, esan behar da B puntuaren abiadura absolutua nulua dela, irristailuaren edozein
punturen translazioa nulua delako, larako baten bitartez lurrera giltzatuta dagoelako. Orduan:
22/33 BBB vvvrrr
+= Beraz:
22/322/30 BBBB vvvvrrrr
−=⇒+= (1)
AABB vvvrrr
+= /22 (2) (1) eta (2) ekuazio bektorialak batzen baditugu, edo abiaduren zinema eta mekanismoen
arteko antzekotasun-propietatea aplikatzen badugu, “Abiaduren zinema mekanismoaren antzekoa dela, baina abiadura angeluarraren noranzkoan 90º biratuta dagoela” gogoraturik, beharrezko abiadurak lortuko dira..
Nalanahi ere, 121. irudian, Avr bektorearen muturretik AB segmentuarekiko zut bat
proiektatuz, 2Bvr zehaztuko dugu.
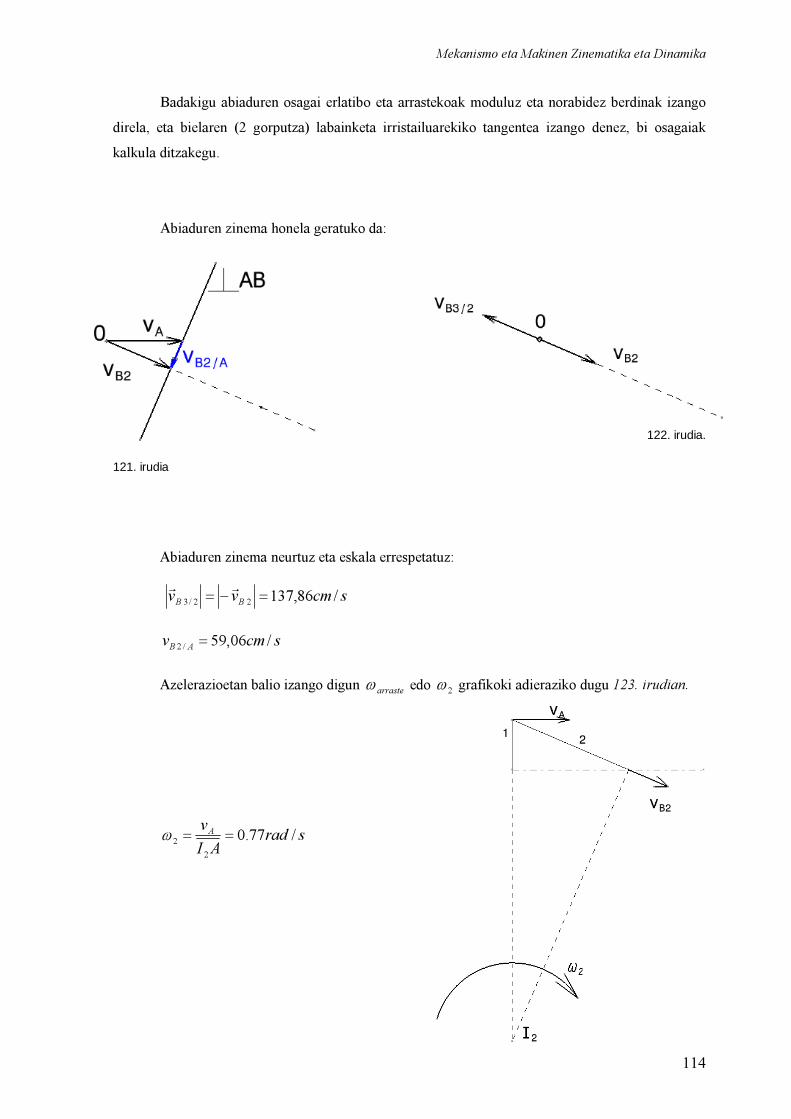
Mekanismo eta Makinen Zinematika eta Dinamika
114
Badakigu abiaduren osagai erlatibo eta arrastekoak moduluz eta norabidez berdinak izango direla, eta bielaren (2 gorputza) labainketa irristailuarekiko tangentea izango denez, bi osagaiak kalkula ditzakegu.
Abiaduren zinema honela geratuko da:
122. irudia.
121. irudia Abiaduren zinema neurtuz eta eskala errespetatuz: scmvv BB /86,13722/3 =−=
rr
scmv AB /06,59/2 = Azelerazioetan balio izango digun arrasteω edo 2ω grafikoki adieraziko dugu 123. irudian.
sradAI
vA /77.02
2 ==ω
Mekanismo eta Makinen Zinematika eta Dinamika
115
123. irudia. Abiadurak zehaztuta, azelerazioen analisira joko dugu orain. Bi gorputzen arteko labainketa bat daukagunez, (2) biradera eta (3) irristailuaren artean,
mugimendu erlatibo horretan ekuazio hau aplikatuko dugu:
CoriolisalabainkorrerlatiboaBarrasteBabsolutuaB aaaarrrr ++= /
edo, CoriolisBBB aaaa
rrrr
++= 2/323 Abiaduretan bezala B puntuaren azelerazio absolutua zero da arrazoi beragatik, sistemako
puntu hori geldi dagoelako:
CoriolisalabainkorrerlatiboaBarrasteB aaarrr ++= /0
Gero, arrasteko osagaia A puntuarekin alderatu daiteke azelerazio normal eta tangentzial
batekin osatua:
CoriolisalabainkorrerlatiboaBAAarrasteB aaaarrrr
+++= //0
CoriolisalabainkorrerlatiboaBAAAarrasteBAarrasteB aatntnrr
rr
rr ++/+++= ///0
Coriolis-en azelerazioa zatikatuz eta A puntuaren azelerazio tangentziala baliogabetuz (ω
konstantea baita).
alabainkorrerlatiboBarrastealabainkorrerlatiboaBAAarrasteBAarrasteB vantn //// 20 rrrr
r ∧⋅++++= ω Orain, Coriolis-en biderkadura eskalar bihurtuz eta mugimendu lau baten azterketa
zinematiko bat eginez, gehiago moldatzen da ekuazioa. Abiadura erlatiboa planoaren bektore denez, eta abiadura angeluarra plano horretatik zut irteten denez:
º90sin20 //// ⋅⋅⋅++++= alabainkorrerlatiboBarrastealabainkorrerlatiboaBAAarrasteBAarrasteB vaatn
rrrr
r
ω
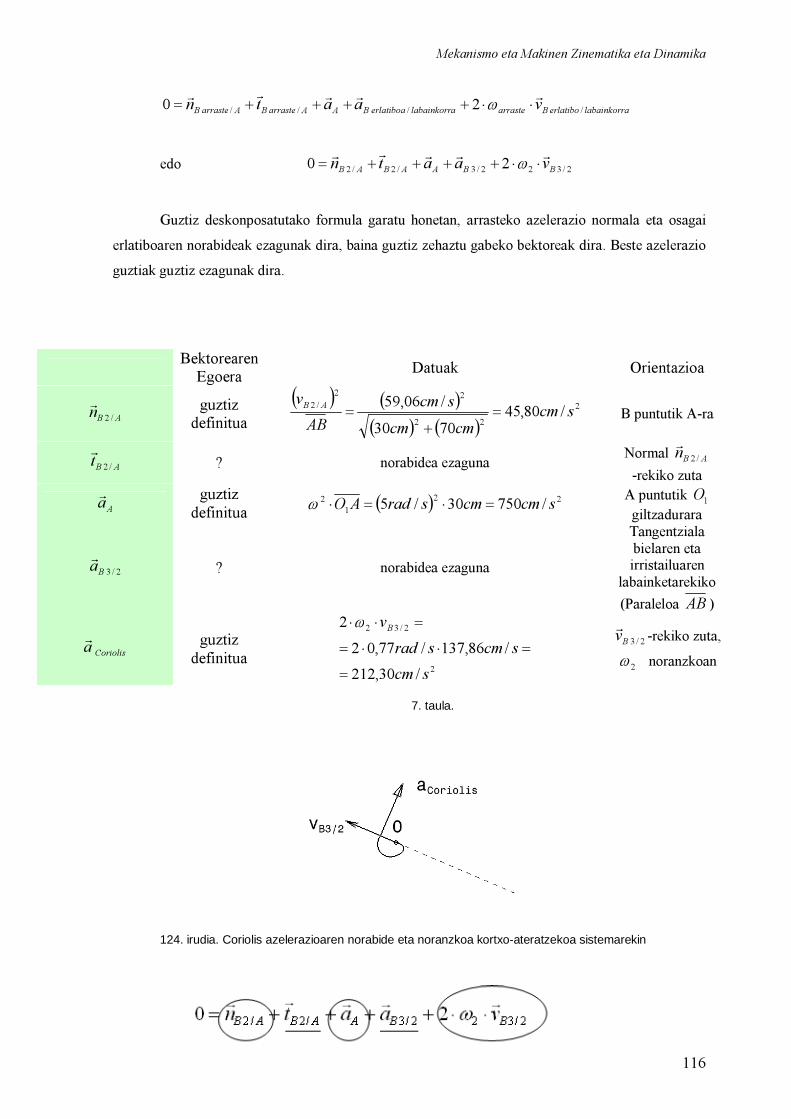
Mekanismo eta Makinen Zinematika eta Dinamika
116
alabainkorrerlatiboBarrastealabainkorrerlatiboaBAAarrasteBAarrasteB vaatn //// 20 rrrr
r
⋅⋅++++= ω edo 2/322/3/2/2 20 BBAABAB vaatn
rrrr
r
⋅⋅++++= ω Guztiz deskonposatutako formula garatu honetan, arrasteko azelerazio normala eta osagai
erlatiboaren norabideak ezagunak dira, baina guztiz zehaztu gabeko bektoreak dira. Beste azelerazio guztiak guztiz ezagunak dira.
Bektorearen Egoera Datuak Orientazioa
ABn /2r
guztiz definitua
( ) ( )( ) ( )
222
22/2 /80,45
7030/06,59 scmcmcmscm
ABv AB =
+= B puntutik A-ra
ABt /2r
? norabidea ezaguna Normal ABn /2r
-rekiko zuta Aa
r
guztiz definitua ( ) 22
12 /75030/5 scmcmsradAO =⋅=⋅ω A puntutik 1O
giltzadurara
2/3Bar
? norabidea ezaguna Tangentziala bielaren eta irristailuaren
labainketarekiko (Paraleloa AB )
Coriolisar
guztiz definitua
2
2/32
/30,212/86,137/77,02
2
scmscmsrad
vB
=
=⋅⋅=
=⋅⋅ω
2/3Bvr -rekiko zuta, 2ω noranzkoan
7. taula.
124. irudia. Coriolis azelerazioaren norabide eta noranzkoa kortxo-ateratzekoa sistemarekin

Mekanismo eta Makinen Zinematika eta Dinamika
117
Zirkuluaren barruan dauden bektoreak guztiz definituak dira, eta azpimarratuta daudenen
norabidea ezagutzen dugu, baina guztiz definitu gabe daude; beraz, oraingoz zati batean ezezagunak dira. Hori guztia zehazteko, azelerazioen zinema marraztu beharko dugu goiko 7. taula -ren datuetan bermatuta.
125. irudia. Azelerazioen zinema edo grafikotik bertatik bektore hauen balioak definituko ditugu:
22/3
2/2
/6,249/1,477scma
scmt
B
AB
=
=
r
r
Eta B buloi edo larakoaren balio absolutuak zero eman behar duenez, hau da, Coriolis,
osagai erlatibo eta arrastekoa batuz bektore erresultanteak balio nulua emango du. Beheko 126. irudian, B puntuaren arrasteko osagaiak zinema laburtzen duela ikus daiteke.
126. irudia.

Mekanismo eta Makinen Zinematika eta Dinamika
118
Dagokion eskalan 22 /77,327 scmaB =
r ematen du, eta azelerazioen zinema eta mekanismoaren arteko antzekotasun-propietateari jaramon eginda: “Azelerazioen zinema mekanismoaren antzekoa da, baina α−°180 biratuta azelerazioen noranzkoan”, grafikoki azelerazioen poloa kokatzeko lehenengo pausoa emango dugu.
Gure kasuan, antzekotasuna bielarena edo (2) gorputzarena bilatzen ari gara; horretarako,
beheko zinema partzialean lerro bat AB norabidean gainezarriko dugu. Bertan α angeluaren balioa kalkulatzen da:
127. irudia. Orain, (2) gorputz horri dagozkion A eta B puntuen azelerazioekiko α angeluaren
noranzkoan azelerazio absolutu bakoitzaren oinarritik bi lerro marrazten baditugu, ebaketa-puntuak azelerazioen poloa definituko du, 128. irudian P hizkiarekin definitua dagoena. Azelerazio poloen ezaugarrien arabera, badakigu irudian aukeratutako instantean bielak azelerazioa nulua duen kokaleku bat izango duela; honela, enuntziatuak eskatzen ziguna lortu ahal izango dugu, (2) gorputz horren azelerazio angeluarra:
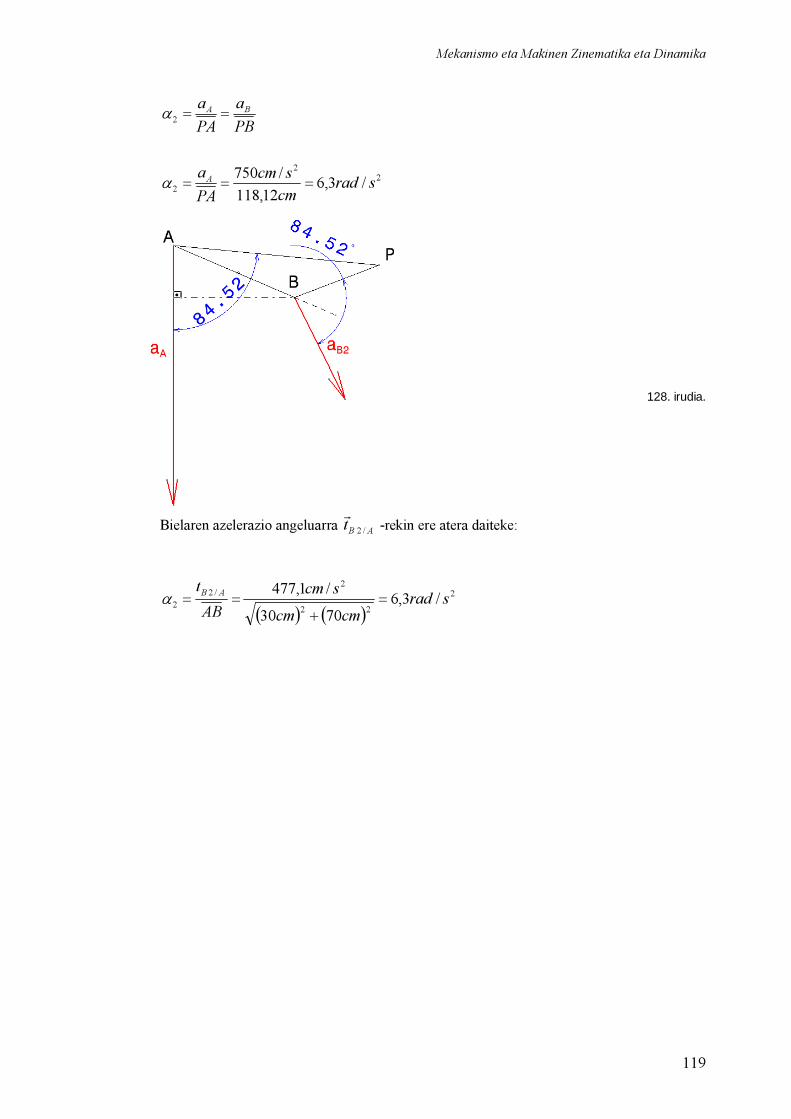
Mekanismo eta Makinen Zinematika eta Dinamika
119
22
2
2
/3,612,118/750 sradcmscm
PAa
PBa
PAa
A
BA
===
==
α
α
128. irudia. Bielaren azelerazio angeluarra ABt /2
r -rekin ere atera daiteke:
( ) ( )2
22
2/2
2 /3,67030/1,477 sradcmcm
scmABt AB =
+==α
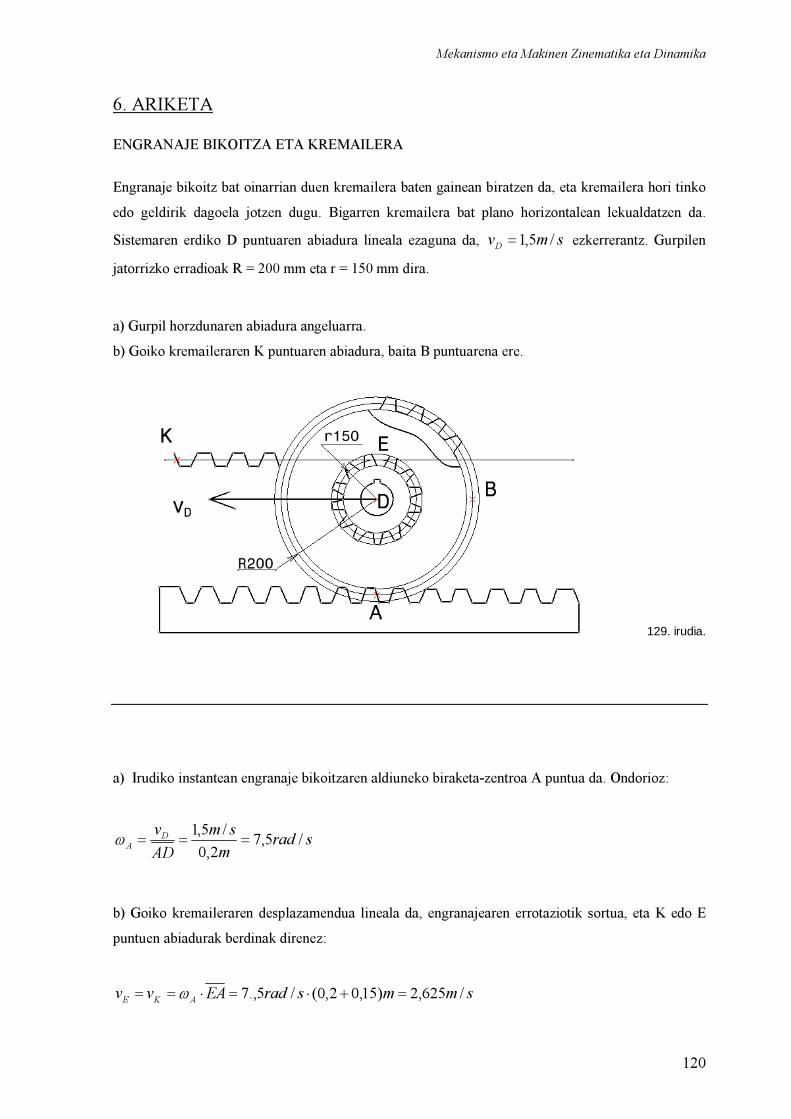
Mekanismo eta Makinen Zinematika eta Dinamika
120
6. ARIKETA ENGRANAJE BIKOITZA ETA KREMAILERA Engranaje bikoitz bat oinarrian duen kremailera baten gainean biratzen da, eta kremailera hori tinko edo geldirik dagoela jotzen dugu. Bigarren kremailera bat plano horizontalean lekualdatzen da. Sistemaren erdiko D puntuaren abiadura lineala ezaguna da, smvD /5,1= ezkerrerantz. Gurpilen jatorrizko erradioak R = 200 mm eta r = 150 mm dira. a) Gurpil horzdunaren abiadura angeluarra. b) Goiko kremaileraren K puntuaren abiadura, baita B puntuarena ere.
129. irudia.
a) Irudiko instantean engranaje bikoitzaren aldiuneko biraketa-zentroa A puntua da. Ondorioz:
sradmsm
ADvD
A /5,72,0/5,1===ω
b) Goiko kremaileraren desplazamendua lineala da, engranajearen errotaziotik sortua, eta K edo E puntuen abiadurak berdinak direnez:
smmsradEAvv AKE /625,2)15,02,0(/5.,7 =+⋅=⋅== ω
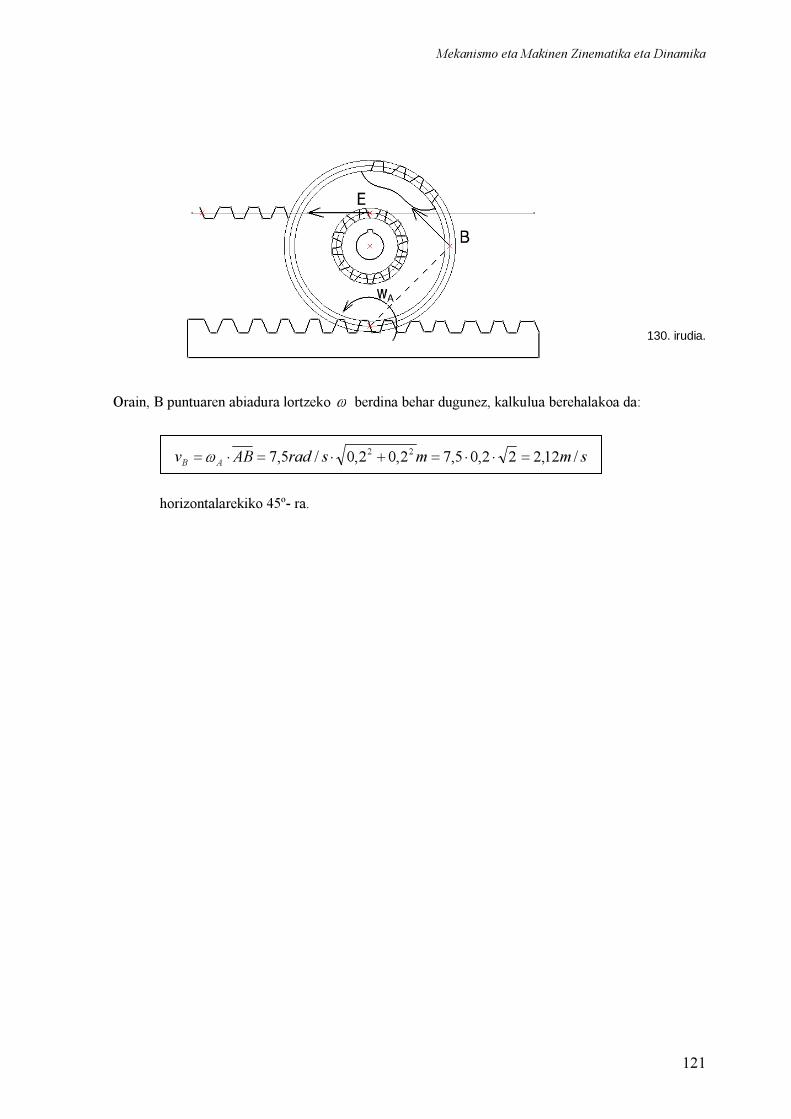
Mekanismo eta Makinen Zinematika eta Dinamika
121
130. irudia. Orain, B puntuaren abiadura lortzeko ω berdina behar dugunez, kalkulua berehalakoa da:
horizontalarekiko 45º- ra.
smmsradABv AB /12,222,05,72,02,0/5,7 22 =⋅⋅=+⋅=⋅=ω
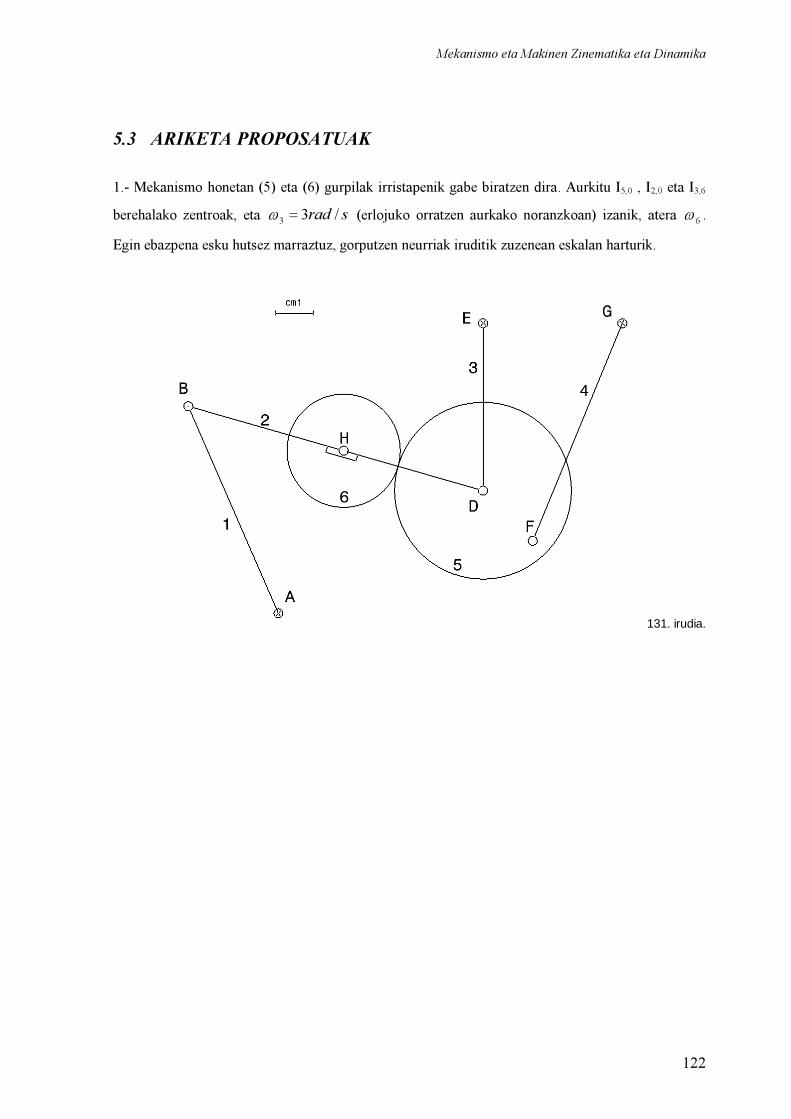
Mekanismo eta Makinen Zinematika eta Dinamika
122
5.3 ARIKETA PROPOSATUAK 1.- Mekanismo honetan (5) eta (6) gurpilak irristapenik gabe biratzen dira. Aurkitu I5,0 , I2,0 eta I3,6 berehalako zentroak, eta srad /33 =ω (erlojuko orratzen aurkako noranzkoan) izanik, atera 6ω . Egin ebazpena esku hutsez marraztuz, gorputzen neurriak iruditik zuzenean eskalan harturik.
131. irudia.
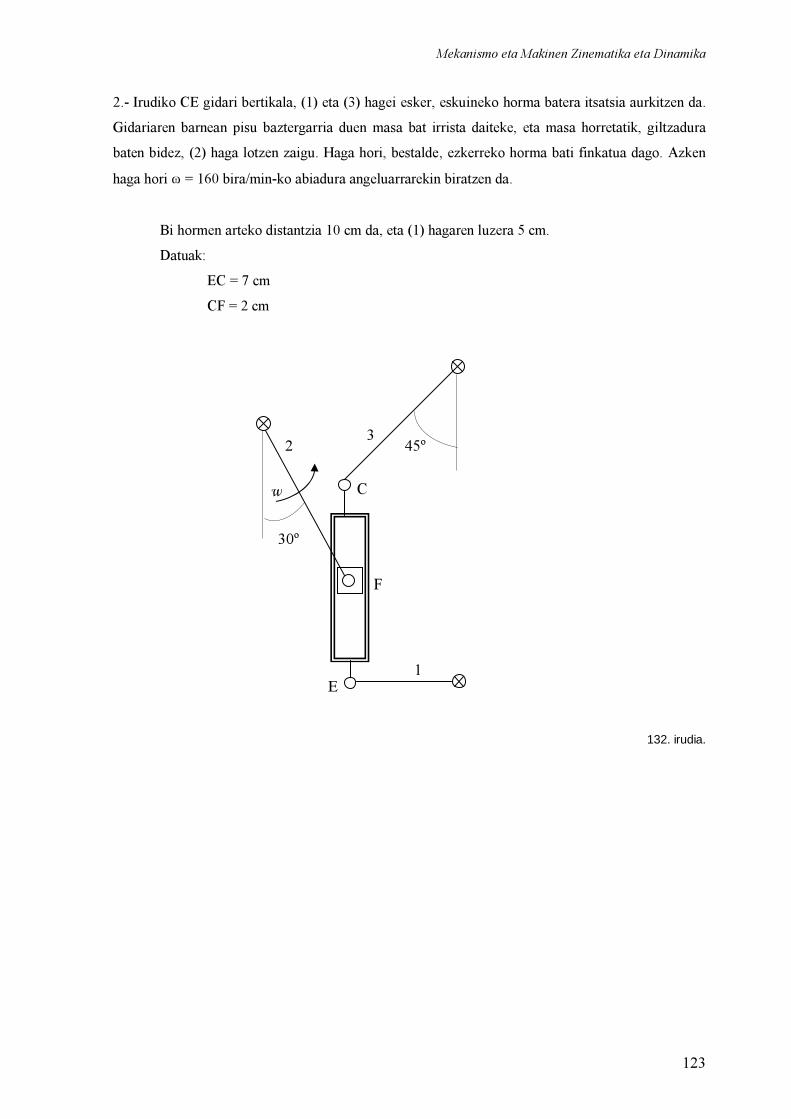
Mekanismo eta Makinen Zinematika eta Dinamika
123
2.- Irudiko CE gidari bertikala, (1) eta (3) hagei esker, eskuineko horma batera itsatsia aurkitzen da. Gidariaren barnean pisu baztergarria duen masa bat irrista daiteke, eta masa horretatik, giltzadura baten bidez, (2) haga lotzen zaigu. Haga hori, bestalde, ezkerreko horma bati finkatua dago. Azken haga hori ω = 160 bira/min-ko abiadura angeluarrarekin biratzen da.
Bi hormen arteko distantzia 10 cm da, eta (1) hagaren luzera 5 cm. Datuak:
EC = 7 cm CF = 2 cm
132. irudia.
2 45º
Cw
3
1 E
F
30º
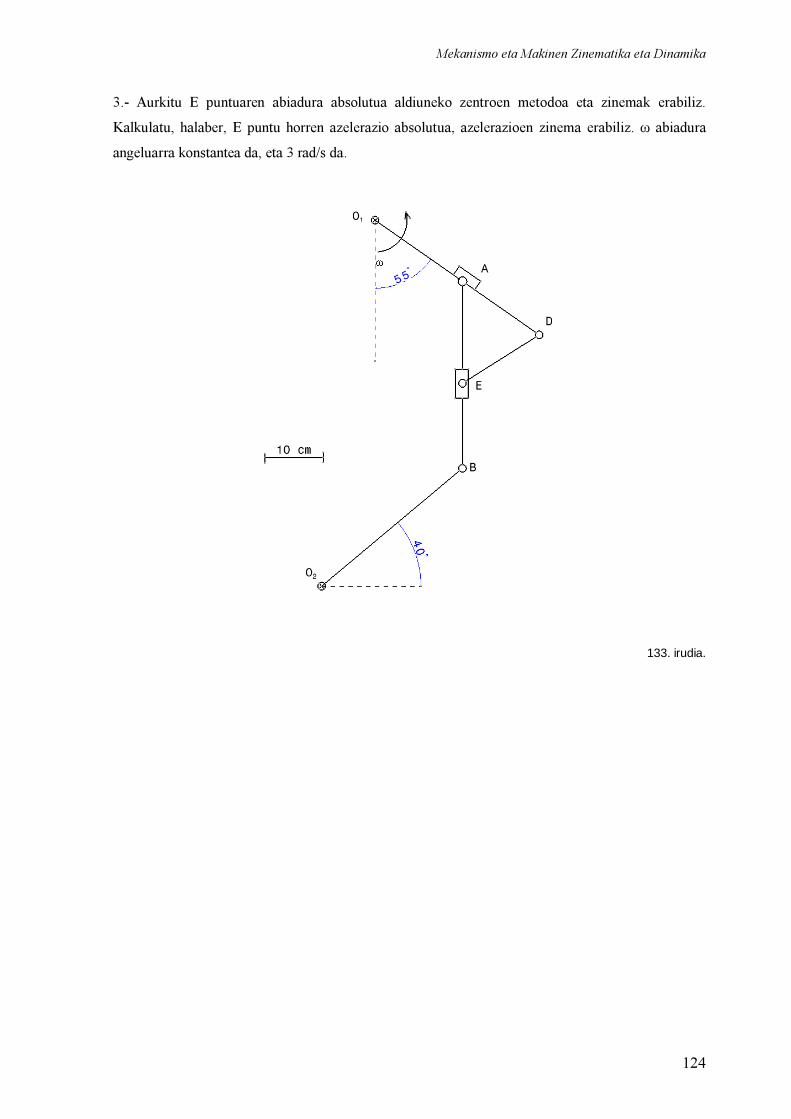
Mekanismo eta Makinen Zinematika eta Dinamika
124
3.- Aurkitu E puntuaren abiadura absolutua aldiuneko zentroen metodoa eta zinemak erabiliz. Kalkulatu, halaber, E puntu horren azelerazio absolutua, azelerazioen zinema erabiliz. ω abiadura angeluarra konstantea da, eta 3 rad/s da. 133. irudia.
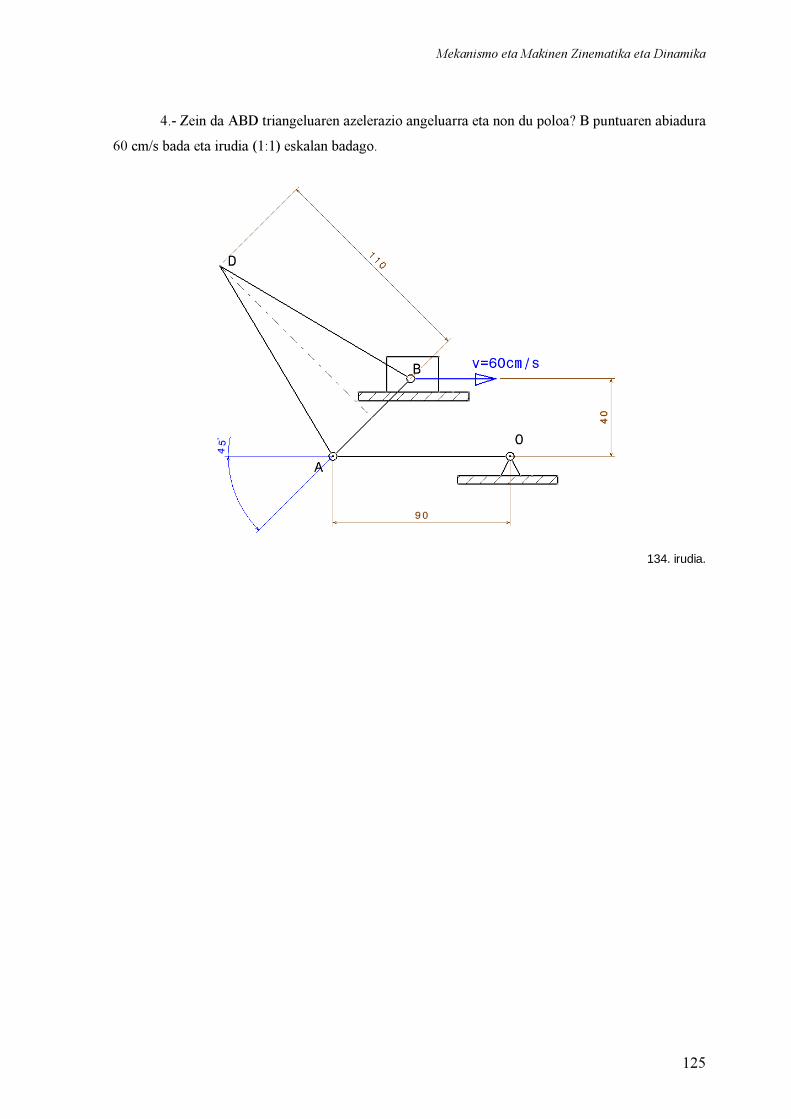
Mekanismo eta Makinen Zinematika eta Dinamika
125
4.- Zein da ABD triangeluaren azelerazio angeluarra eta non du poloa? B puntuaren abiadura
60 cm/s bada eta irudia (1:1) eskalan badago. 134. irudia.
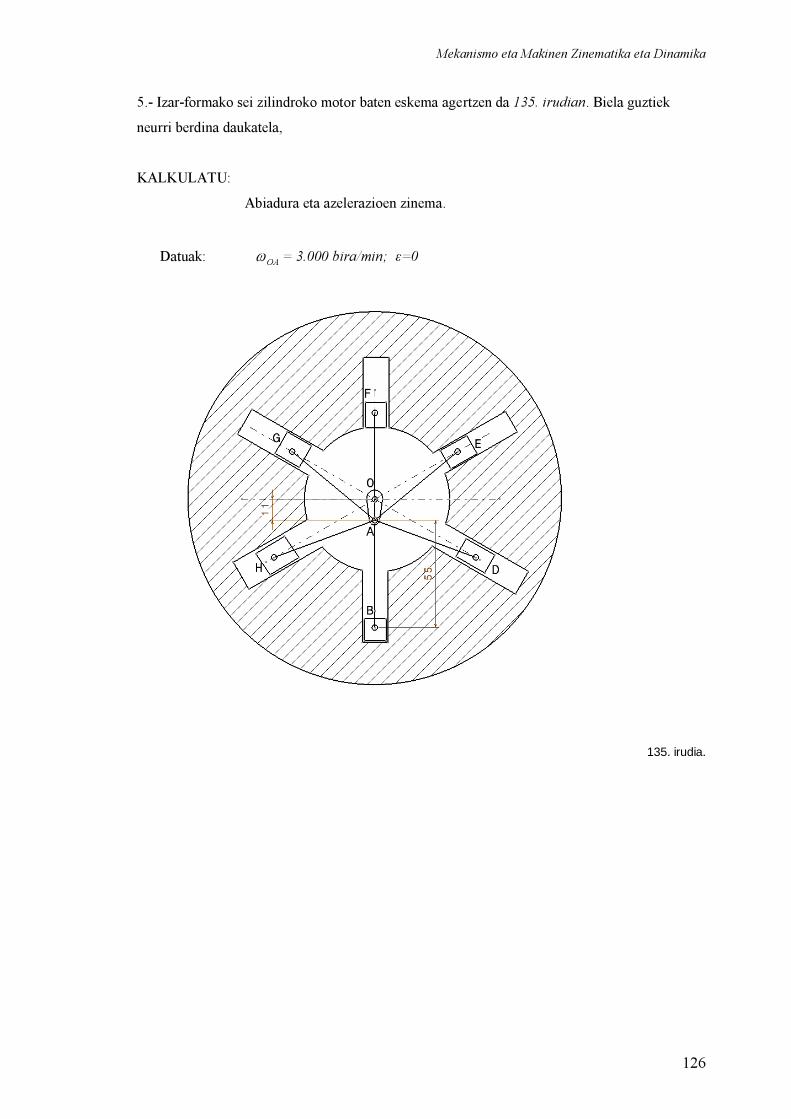
Mekanismo eta Makinen Zinematika eta Dinamika
126
5.- Izar-formako sei zilindroko motor baten eskema agertzen da 135. irudian. Biela guztiek neurri berdina daukatela, KALKULATU:
Abiadura eta azelerazioen zinema. Datuak: OAω = 3.000 bira/min; ε=0
135. irudia.
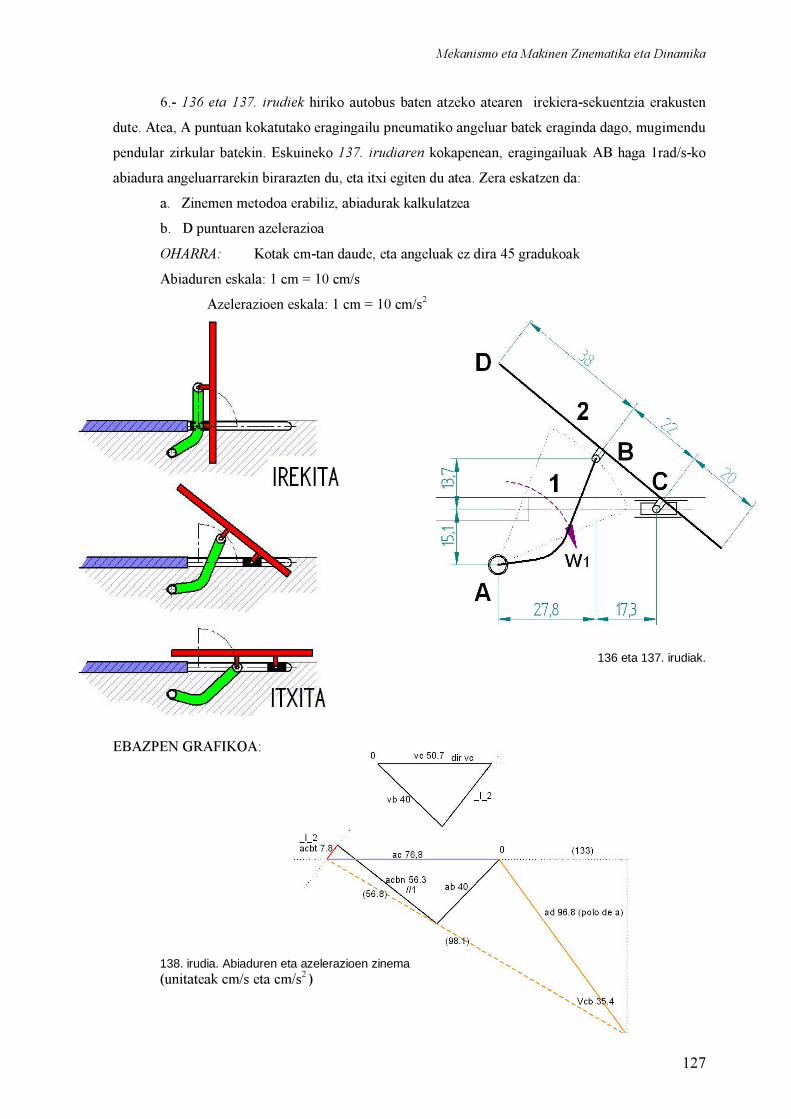
Mekanismo eta Makinen Zinematika eta Dinamika
127
6.- 136 eta 137. irudiek hiriko autobus baten atzeko atearen irekiera-sekuentzia erakusten dute. Atea, A puntuan kokatutako eragingailu pneumatiko angeluar batek eraginda dago, mugimendu pendular zirkular batekin. Eskuineko 137. irudiaren kokapenean, eragingailuak AB haga 1rad/s-ko abiadura angeluarrarekin birarazten du, eta itxi egiten du atea. Zera eskatzen da:
a. Zinemen metodoa erabiliz, abiadurak kalkulatzea b. D puntuaren azelerazioa OHARRA: Kotak cm-tan daude, eta angeluak ez dira 45 gradukoak Abiaduren eskala: 1 cm = 10 cm/s Azelerazioen eskala: 1 cm = 10 cm/s2
136 eta 137. irudiak. EBAZPEN GRAFIKOA: 138. irudia. Abiaduren eta azelerazioen zinema (unitateak cm/s eta cm/s2 )
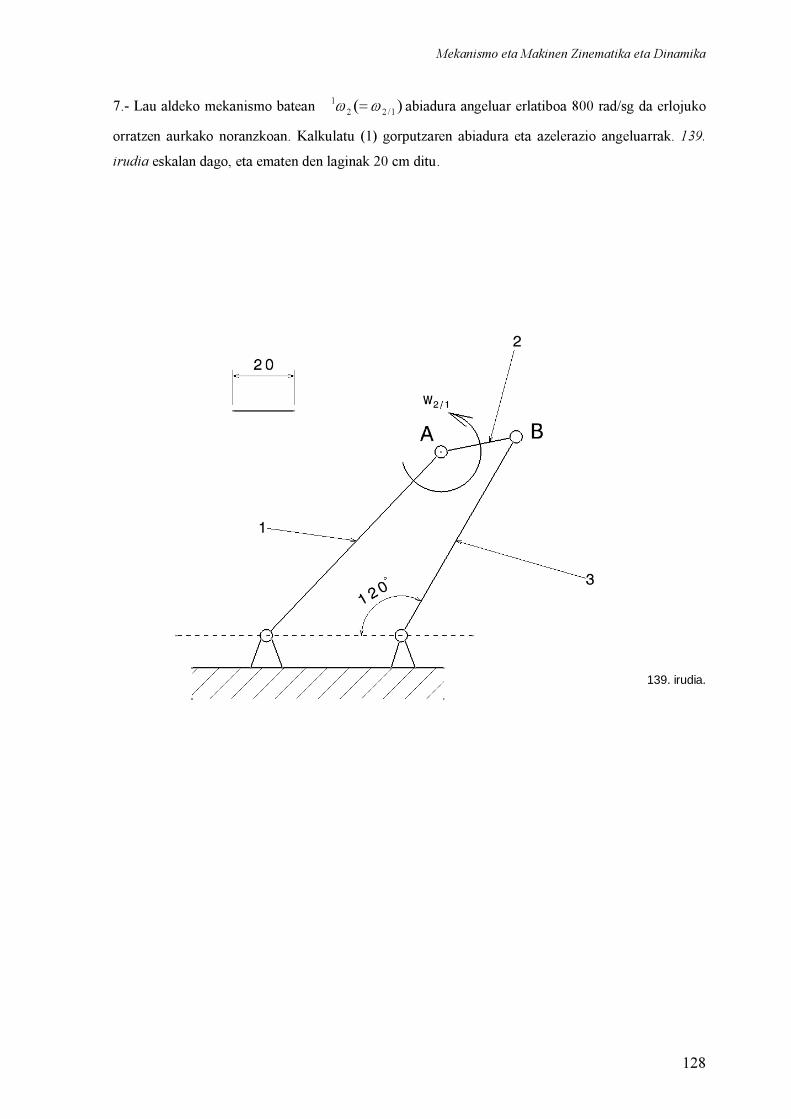
Mekanismo eta Makinen Zinematika eta Dinamika
128
7.- Lau aldeko mekanismo batean )( 1/221 ωω = abiadura angeluar erlatiboa 800 rad/sg da erlojuko
orratzen aurkako noranzkoan. Kalkulatu (1) gorputzaren abiadura eta azelerazio angeluarrak. 139. irudia eskalan dago, eta ematen den laginak 20 cm ditu.
139. irudia.
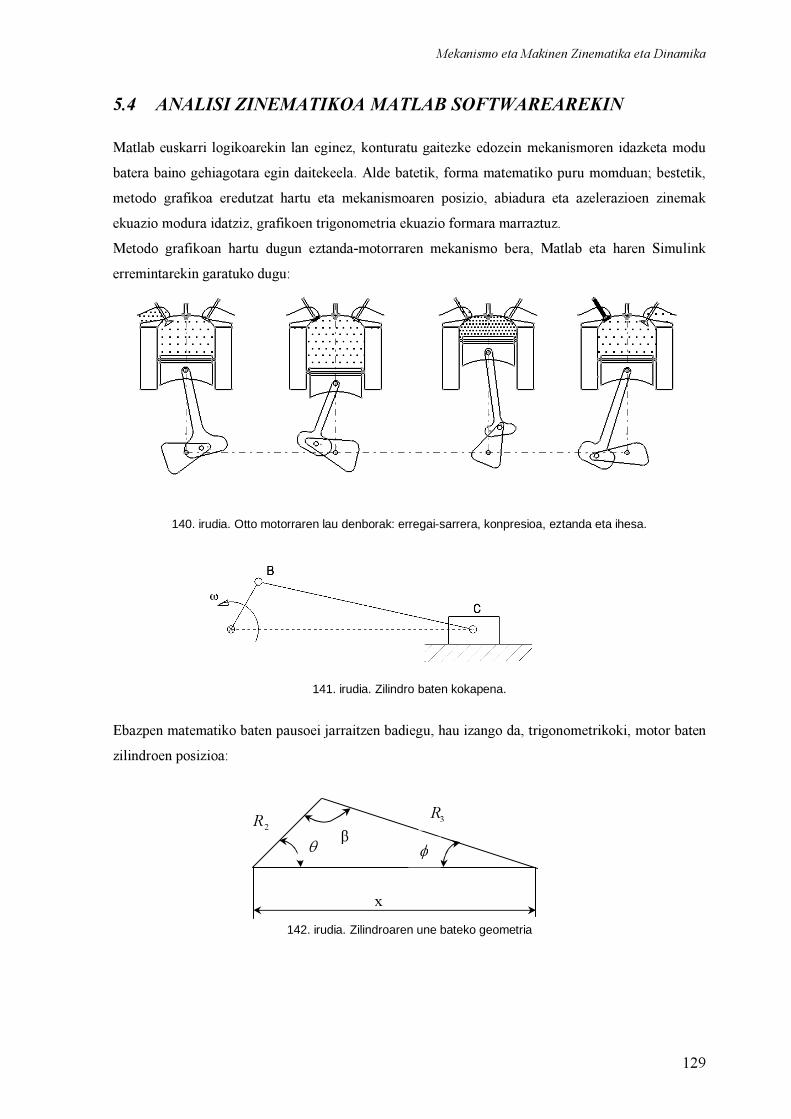
Mekanismo eta Makinen Zinematika eta Dinamika
129
x
2R 3R θ φ β
5.4 ANALISI ZINEMATIKOA MATLAB SOFTWAREAREKIN Matlab euskarri logikoarekin lan eginez, konturatu gaitezke edozein mekanismoren idazketa modu batera baino gehiagotara egin daitekeela. Alde batetik, forma matematiko puru momduan; bestetik, metodo grafikoa eredutzat hartu eta mekanismoaren posizio, abiadura eta azelerazioen zinemak ekuazio modura idatziz, grafikoen trigonometria ekuazio formara marraztuz. Metodo grafikoan hartu dugun eztanda-motorraren mekanismo bera, Matlab eta haren Simulink erremintarekin garatuko dugu:
140. irudia. Otto motorraren lau denborak: erregai-sarrera, konpresioa, eztanda eta ihesa.
141. irudia. Zilindro baten kokapena. Ebazpen matematiko baten pausoei jarraitzen badiegu, hau izango da, trigonometrikoki, motor baten zilindroen posizioa:
142. irudia. Zilindroaren une bateko geometria

Mekanismo eta Makinen Zinematika eta Dinamika
130
Eta kokapeneko 142. irudia begiratzen badugu, “x”- k, orgaren kokapen aldakorrak, R2 eta R3 neurri konstanteen aldean, balio hau izango du:
φθ coscos 32 RRx += (1) Eta lerro bertikalean: φθ sinsin 32 RR = (2)
Bi ekuazioak batu nahian, eta bigarren ekuazioan zentratuz: φθ sinsin3
2 =
RR
)(sin1cos 22
3
2 θφ
−=RR
Zeinu trigonometriko hori lehenengo ekuazioan sartuz, hau izango da pistoiaren kokapena θ sarreraangeluaren funtzio gisa:
( )θθ 22
3
232 sin1cos
−+=RRRRx
Eta x posizioa deribatuz, abiadura aterako dugu:
θ
θθθ2
2
3
2
2
3
232
sin1
)2sin(2sin
−
−−=
RRR
RRRx &&
Ikus daitekeen bezala, bigarren deribatua nahasi xamarra izango litzateke; horregatik, kasu horietan Matlab-ek duen Simulink erremintara jotzen da, bertako blokeak konbinatuz programaren idazpena eta ebazpen matematikoa laburtzeko. Simulink-en blokeek funtzio bat baino gehiago dituzte; adibidez, abiaduraren azken ekuazio hori integratzaile – deribatu batekin sinplifika daiteke. Ondorengo lehenengo irudian, ariketaren artxiboa Matlab-en forma arruntarekin joango litzateke. Lerroetako ekuazioak zinemen grafikoen adierazpenetatik irtendakoak dira:
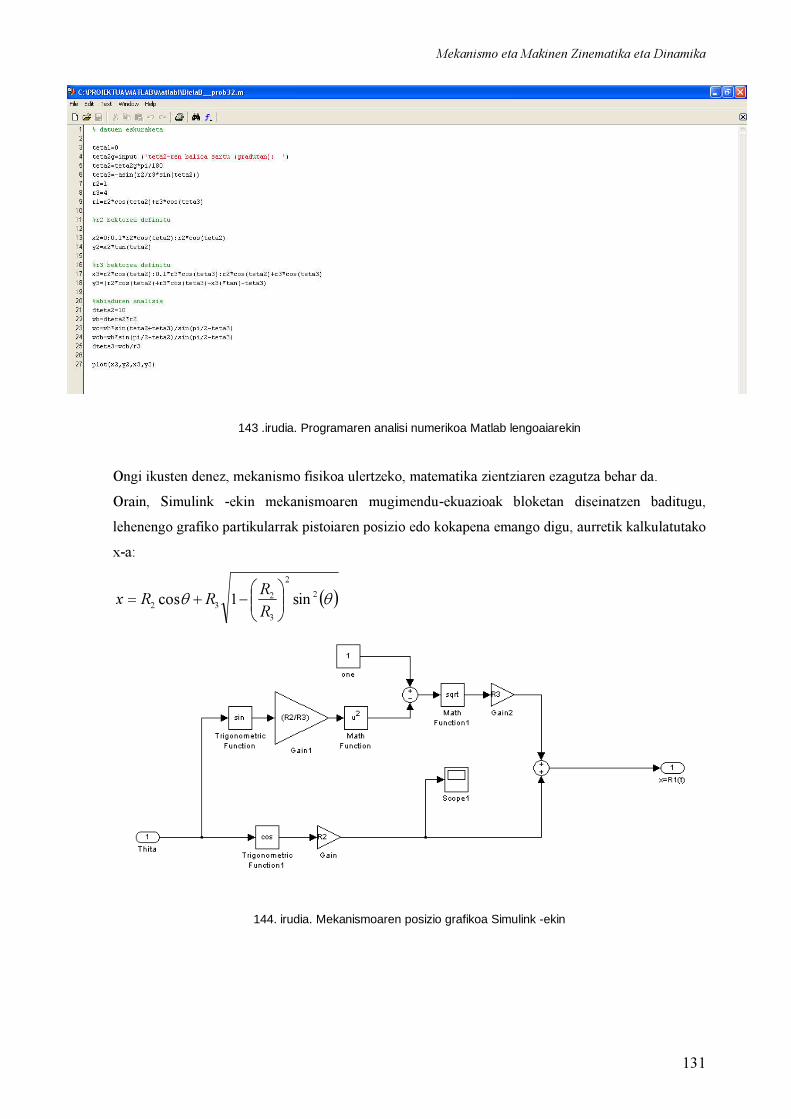
Mekanismo eta Makinen Zinematika eta Dinamika
131
143 .irudia. Programaren analisi numerikoa Matlab lengoaiarekin
Ongi ikusten denez, mekanismo fisikoa ulertzeko, matematika zientziaren ezagutza behar da. Orain, Simulink -ekin mekanismoaren mugimendu-ekuazioak bloketan diseinatzen baditugu, lehenengo grafiko partikularrak pistoiaren posizio edo kokapena emango digu, aurretik kalkulatutako x-a:
( )θθ 22
3
232 sin1cos
−+=RRRRx
144. irudia. Mekanismoaren posizio grafikoa Simulink -ekin
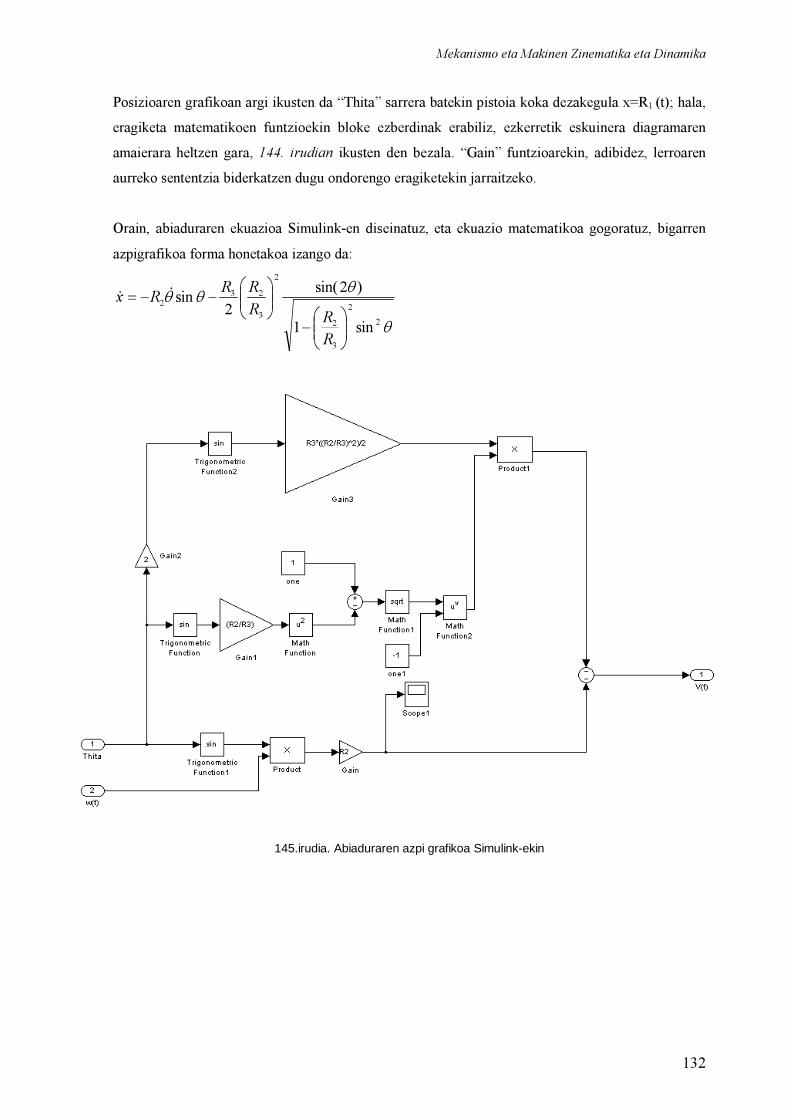
Mekanismo eta Makinen Zinematika eta Dinamika
132
Posizioaren grafikoan argi ikusten da “Thita” sarrera batekin pistoia koka dezakegula x=R1 (t); hala, eragiketa matematikoen funtzioekin bloke ezberdinak erabiliz, ezkerretik eskuinera diagramaren amaierara heltzen gara, 144. irudian ikusten den bezala. “Gain” funtzioarekin, adibidez, lerroaren aurreko sententzia biderkatzen dugu ondorengo eragiketekin jarraitzeko. Orain, abiaduraren ekuazioa Simulink-en diseinatuz, eta ekuazio matematikoa gogoratuz, bigarren azpigrafikoa forma honetakoa izango da:
θ
θθθ2
2
3
2
2
3
232
sin1
)2sin(2sin
−
−−=
RRR
RRRx &&
145.irudia. Abiaduraren azpi grafikoa Simulink-ekin
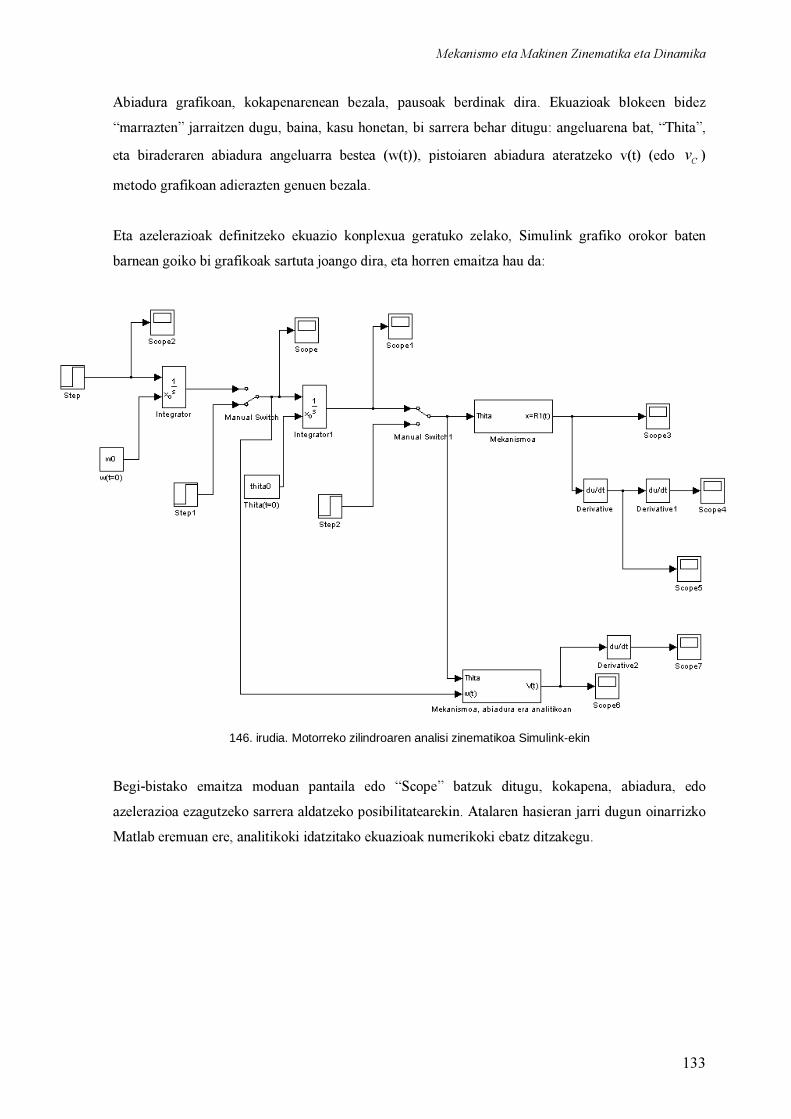
Mekanismo eta Makinen Zinematika eta Dinamika
133
Abiadura grafikoan, kokapenarenean bezala, pausoak berdinak dira. Ekuazioak blokeen bidez “marrazten” jarraitzen dugu, baina, kasu honetan, bi sarrera behar ditugu: angeluarena bat, “Thita”, eta biraderaren abiadura angeluarra bestea (w(t)), pistoiaren abiadura ateratzeko v(t) (edo Cv ) metodo grafikoan adierazten genuen bezala. Eta azelerazioak definitzeko ekuazio konplexua geratuko zelako, Simulink grafiko orokor baten barnean goiko bi grafikoak sartuta joango dira, eta horren emaitza hau da:
146. irudia. Motorreko zilindroaren analisi zinematikoa Simulink-ekin
Begi-bistako emaitza moduan pantaila edo “Scope” batzuk ditugu, kokapena, abiadura, edo azelerazioa ezagutzeko sarrera aldatzeko posibilitatearekin. Atalaren hasieran jarri dugun oinarrizko Matlab eremuan ere, analitikoki idatzitako ekuazioak numerikoki ebatz ditzakegu.
Mekanismo eta Makinen Zinematika eta Dinamika
134
147.irudia. Zilindro baten kokapena ”Scope” batekin
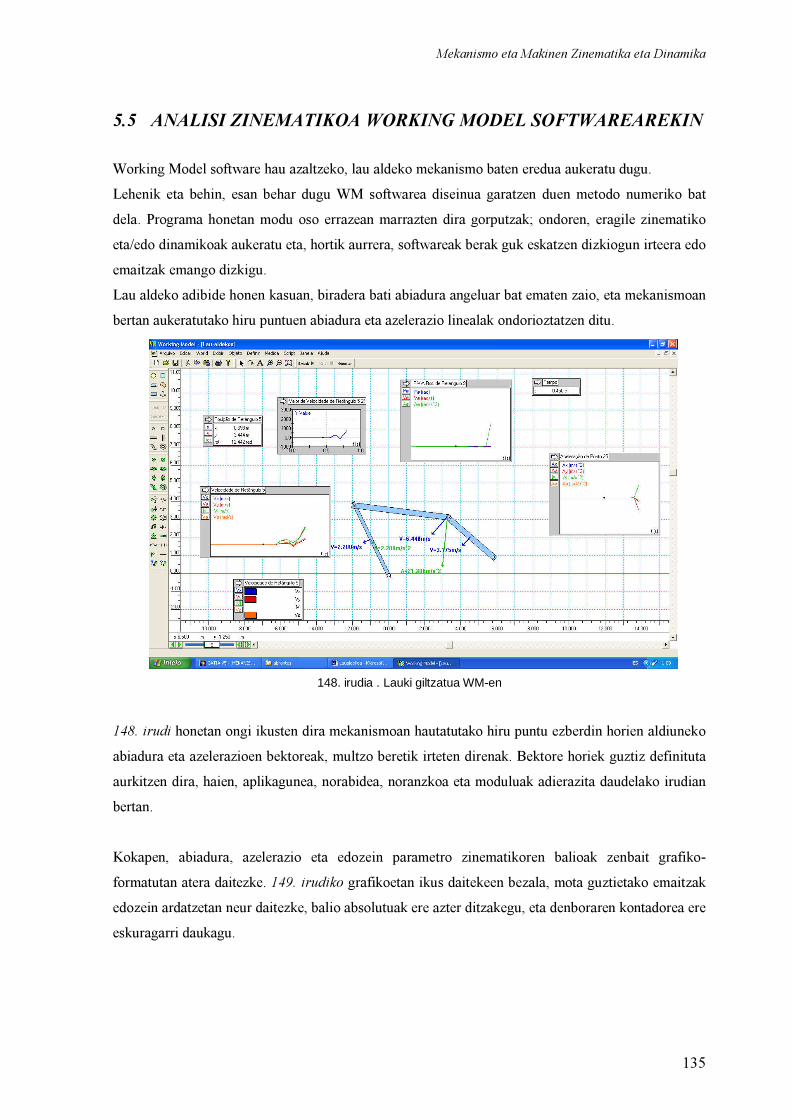
Mekanismo eta Makinen Zinematika eta Dinamika
135
5.5 ANALISI ZINEMATIKOA WORKING MODEL SOFTWAREAREKIN Working Model software hau azaltzeko, lau aldeko mekanismo baten eredua aukeratu dugu. Lehenik eta behin, esan behar dugu WM softwarea diseinua garatzen duen metodo numeriko bat dela. Programa honetan modu oso errazean marrazten dira gorputzak; ondoren, eragile zinematiko eta/edo dinamikoak aukeratu eta, hortik aurrera, softwareak berak guk eskatzen dizkiogun irteera edo emaitzak emango dizkigu. Lau aldeko adibide honen kasuan, biradera bati abiadura angeluar bat ematen zaio, eta mekanismoan bertan aukeratutako hiru puntuen abiadura eta azelerazio linealak ondorioztatzen ditu.
148. irudia . Lauki giltzatua WM-en
148. irudi honetan ongi ikusten dira mekanismoan hautatutako hiru puntu ezberdin horien aldiuneko abiadura eta azelerazioen bektoreak, multzo beretik irteten direnak. Bektore horiek guztiz definituta aurkitzen dira, haien, aplikagunea, norabidea, noranzkoa eta moduluak adierazita daudelako irudian bertan. Kokapen, abiadura, azelerazio eta edozein parametro zinematikoren balioak zenbait grafiko-formatutan atera daitezke. 149. irudiko grafikoetan ikus daitekeen bezala, mota guztietako emaitzak edozein ardatzetan neur daitezke, balio absolutuak ere azter ditzakegu, eta denboraren kontadorea ere eskuragarri daukagu.

Mekanismo eta Makinen Zinematika eta Dinamika
136
149. irudia . WM-eko emaitzak grafiko eran
Beste ariketa adibide bat Working Model-ekin Aipatu bezala, euskarri logiko edo programa honetan ikertutako moduluak, atal zinematikoaz gainera, badauka eremu dinamikoa ere, non indar edo kargen eraginak mugimenduan zerikusia ere baduten, eta alderantziz. Working Model-ek, orain gutxi arte, 2 dimentsioko planoetan egiten zituen analisiak, baina azken urteetan 3 dimentsioko bertsioa merkaturatu dute; dena den, Catia, Unigraphics eta Solid-Works softwareen aplikazio antzeko samarra du. Beste aldaera baten bila, uste dut 2D-ko programa bat ikasmaterial hau aberasteko ondo etorriko dela, gure ikasleek ikasgeletan analisi fisikoak bi dimentsiotan egiten dituztelako, eta geletako kontzeptu teorikoak ulertzeko lagungarria izan daiteke. Motorreko biela- biradera sistema bat WM-en honela lantzen da:
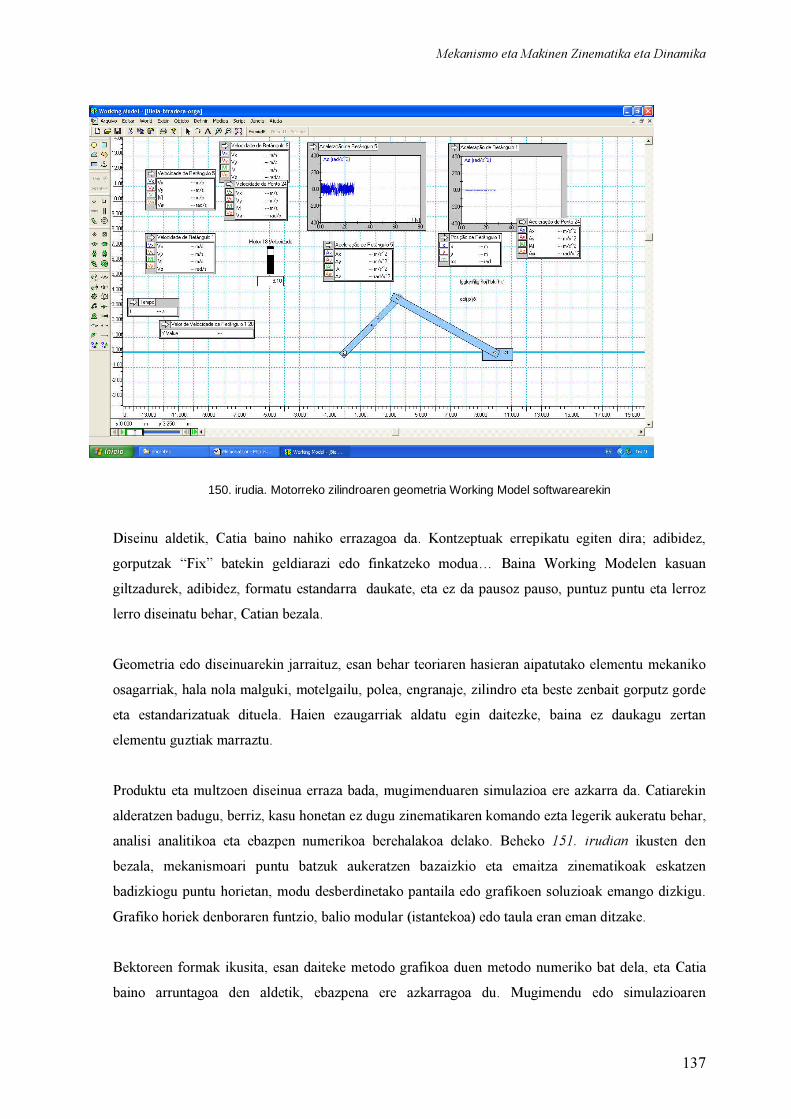
Mekanismo eta Makinen Zinematika eta Dinamika
137
150. irudia. Motorreko zilindroaren geometria Working Model softwarearekin
Diseinu aldetik, Catia baino nahiko errazagoa da. Kontzeptuak errepikatu egiten dira; adibidez, gorputzak “Fix” batekin geldiarazi edo finkatzeko modua… Baina Working Modelen kasuan giltzadurek, adibidez, formatu estandarra daukate, eta ez da pausoz pauso, puntuz puntu eta lerroz lerro diseinatu behar, Catian bezala. Geometria edo diseinuarekin jarraituz, esan behar teoriaren hasieran aipatutako elementu mekaniko osagarriak, hala nola malguki, motelgailu, polea, engranaje, zilindro eta beste zenbait gorputz gorde eta estandarizatuak dituela. Haien ezaugarriak aldatu egin daitezke, baina ez daukagu zertan elementu guztiak marraztu. Produktu eta multzoen diseinua erraza bada, mugimenduaren simulazioa ere azkarra da. Catiarekin alderatzen badugu, berriz, kasu honetan ez dugu zinematikaren komando ezta legerik aukeratu behar, analisi analitikoa eta ebazpen numerikoa berehalakoa delako. Beheko 151. irudian ikusten den bezala, mekanismoari puntu batzuk aukeratzen bazaizkio eta emaitza zinematikoak eskatzen badizkiogu puntu horietan, modu desberdinetako pantaila edo grafikoen soluzioak emango dizkigu. Grafiko horiek denboraren funtzio, balio modular (istantekoa) edo taula eran eman ditzake. Bektoreen formak ikusita, esan daiteke metodo grafikoa duen metodo numeriko bat dela, eta Catia baino arruntagoa den aldetik, ebazpena ere azkarragoa du. Mugimendu edo simulazioaren
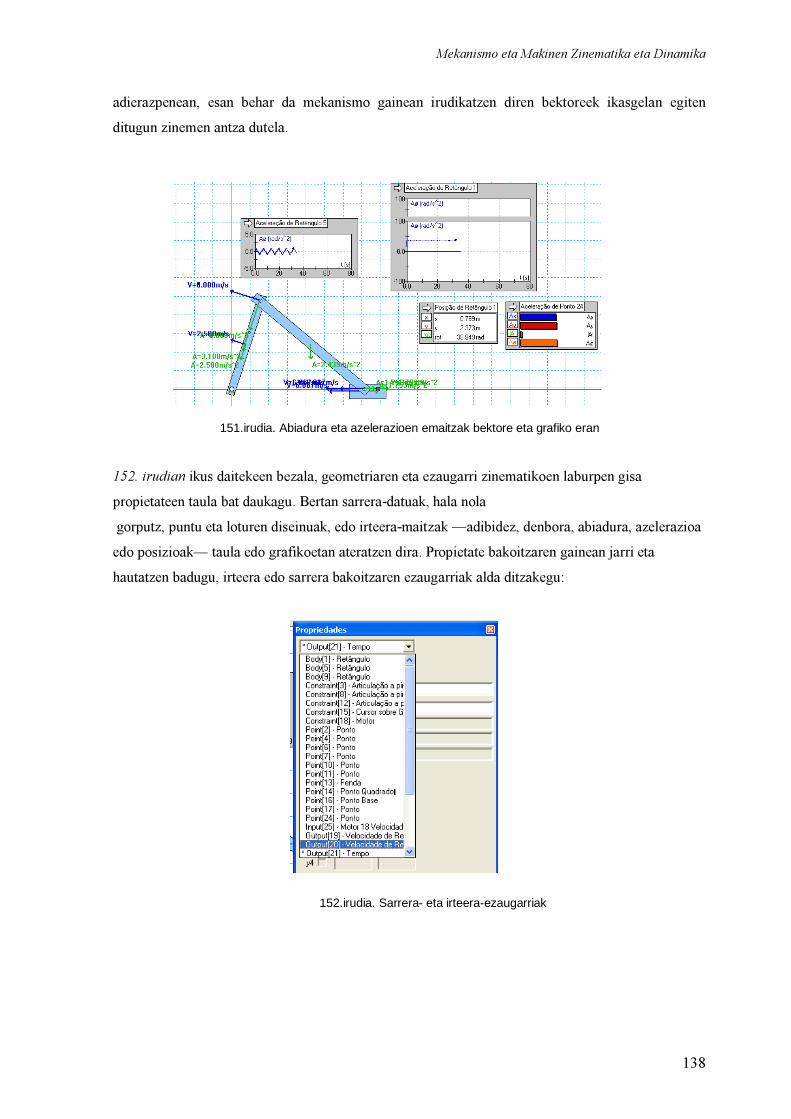
Mekanismo eta Makinen Zinematika eta Dinamika
138
adierazpenean, esan behar da mekanismo gainean irudikatzen diren bektoreek ikasgelan egiten ditugun zinemen antza dutela.
151.irudia. Abiadura eta azelerazioen emaitzak bektore eta grafiko eran
152. irudian ikus daitekeen bezala, geometriaren eta ezaugarri zinematikoen laburpen gisa propietateen taula bat daukagu. Bertan sarrera-datuak, hala nola gorputz, puntu eta loturen diseinuak, edo irteera-maitzak —adibidez, denbora, abiadura, azelerazioa edo posizioak— taula edo grafikoetan ateratzen dira. Propietate bakoitzaren gainean jarri eta hautatzen badugu, irteera edo sarrera bakoitzaren ezaugarriak alda ditzakegu:
152.irudia. Sarrera- eta irteera-ezaugarriak
Mekanismo eta Makinen Zinematika eta Dinamika
139
MEKANISMO ETA
MAKINEN DINAMIKA
Mekanismo eta Makinen Zinematika eta Dinamika
140
6 MEKANISMO ETA MAKINEN DINAMIKA-ARIKETAK
6.1 OINARRIZKO DINAMIKA (NEWTON)
1.181 kg-ko automobil bat pausagunean izanik, aurkitu lurrak gurpilei eragiten dizkien indar normalak.
153. irudia.
-----------------------------------------------------------------------------------
Lehenik, solido askearen diagrama marraztuko dugu. Automobila isolatuz, pisuak eta lurrak eragiten dizkioten erreakzioak agertuko dira. Aurreko
eta atzeko gurpiletan A eta B erreakzio ezezagunak eragiten dute.
154. irudia.
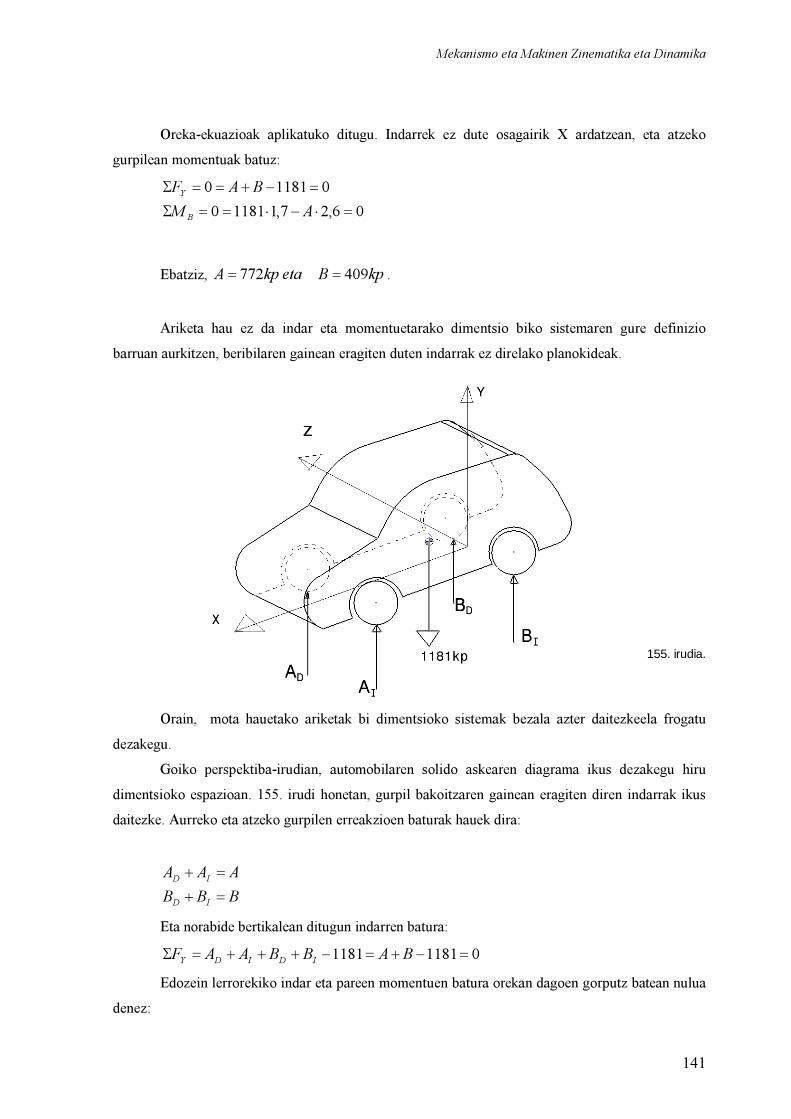
Mekanismo eta Makinen Zinematika eta Dinamika
141
Oreka-ekuazioak aplikatuko ditugu. Indarrek ez dute osagairik X ardatzean, eta atzeko gurpilean momentuak batuz:
06,27,111810011810
=⋅−⋅==Σ=−+==ΣAM
BAFB
Y
Ebatziz, kpBetakpA 409772 == . Ariketa hau ez da indar eta momentuetarako dimentsio biko sistemaren gure definizio
barruan aurkitzen, beribilaren gainean eragiten duten indarrak ez direlako planokideak.
155. irudia.
Orain, mota hauetako ariketak bi dimentsioko sistemak bezala azter daitezkeela frogatu
dezakegu. Goiko perspektiba-irudian, automobilaren solido askearen diagrama ikus dezakegu hiru
dimentsioko espazioan. 155. irudi honetan, gurpil bakoitzaren gainean eragiten diren indarrak ikus daitezke. Aurreko eta atzeko gurpilen erreakzioen baturak hauek dira:
BBBAAA
ID
ID
=+
=+
Eta norabide bertikalean ditugun indarren batura: 011811181 =−+=−+++=Σ BABBAAF IDIDY
Edozein lerrorekiko indar eta pareen momentuen batura orekan dagoen gorputz batean nulua denez:
Mekanismo eta Makinen Zinematika eta Dinamika
142
011817,16,211817,1))(7,19,0( =⋅−⋅=⋅−++=Σ AAAM IDZ Ikus dezakegun bezala, espazioan (3D) lortutako ekuazioa eta planoan (2D) lortutakoa berdinak dira; beraz, prozedura analitiko bera bi kasuetan.
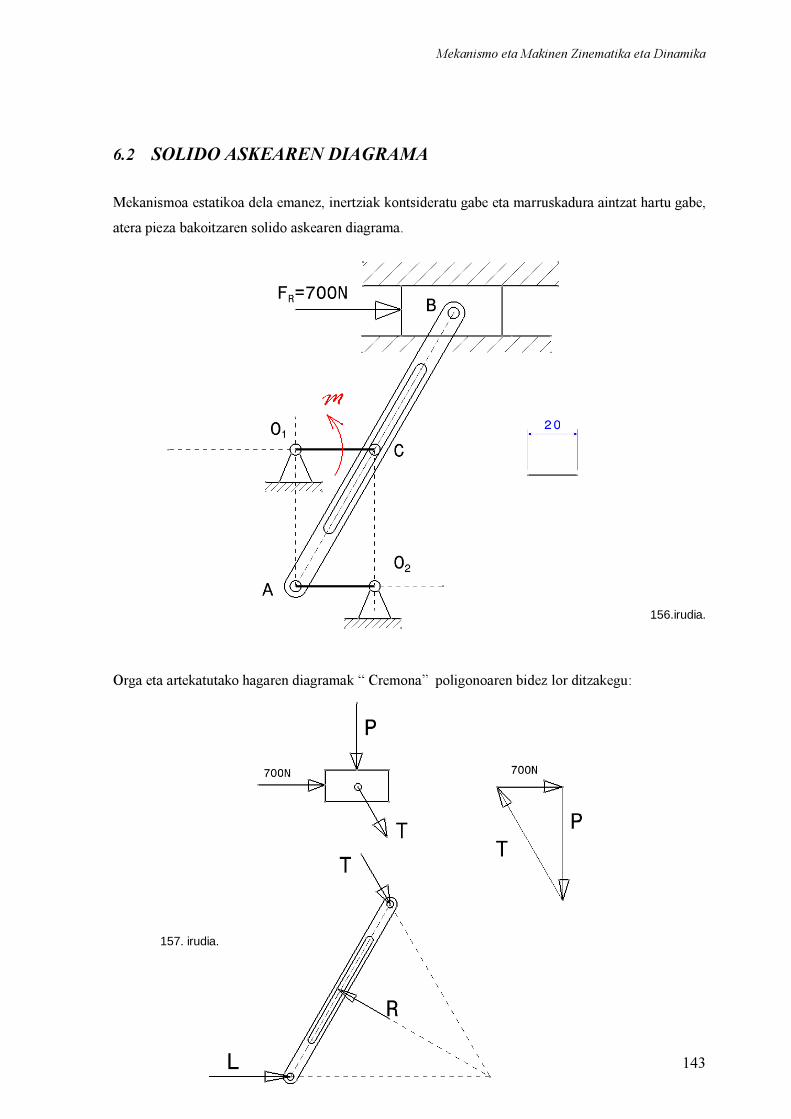
Mekanismo eta Makinen Zinematika eta Dinamika
143
6.2 SOLIDO ASKEAREN DIAGRAMA Mekanismoa estatikoa dela emanez, inertziak kontsideratu gabe eta marruskadura aintzat hartu gabe, atera pieza bakoitzaren solido askearen diagrama.
156.irudia.
Orga eta artekatutako hagaren diagramak “ Cremona” poligonoaren bidez lor ditzakegu:
157. irudia.
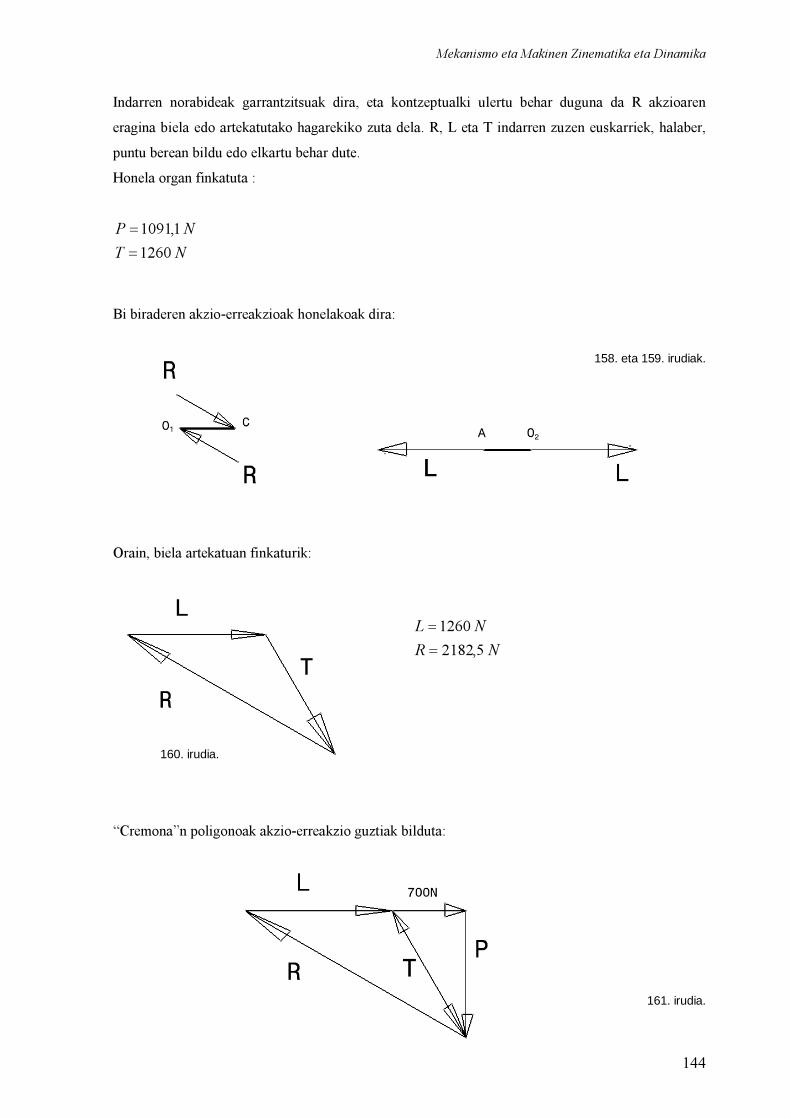
Mekanismo eta Makinen Zinematika eta Dinamika
144
Indarren norabideak garrantzitsuak dira, eta kontzeptualki ulertu behar duguna da R akzioaren eragina biela edo artekatutako hagarekiko zuta dela. R, L eta T indarren zuzen euskarriek, halaber, puntu berean bildu edo elkartu behar dute. Honela organ finkatuta :
NTNP
12601,1091
=
=
Bi biraderen akzio-erreakzioak honelakoak dira:
158. eta 159. irudiak.
Orain, biela artekatuan finkaturik:
160. irudia.
“Cremona”n poligonoak akzio-erreakzio guztiak bilduta:
161. irudia.
NRNL5,2182
1260=
=
Mekanismo eta Makinen Zinematika eta Dinamika
145
CO1 biradera berehala aurkitzen da:
mNCOPCORM Y ⋅=⋅⋅=⋅=⋅=− 40,171094,151,1091 3
11
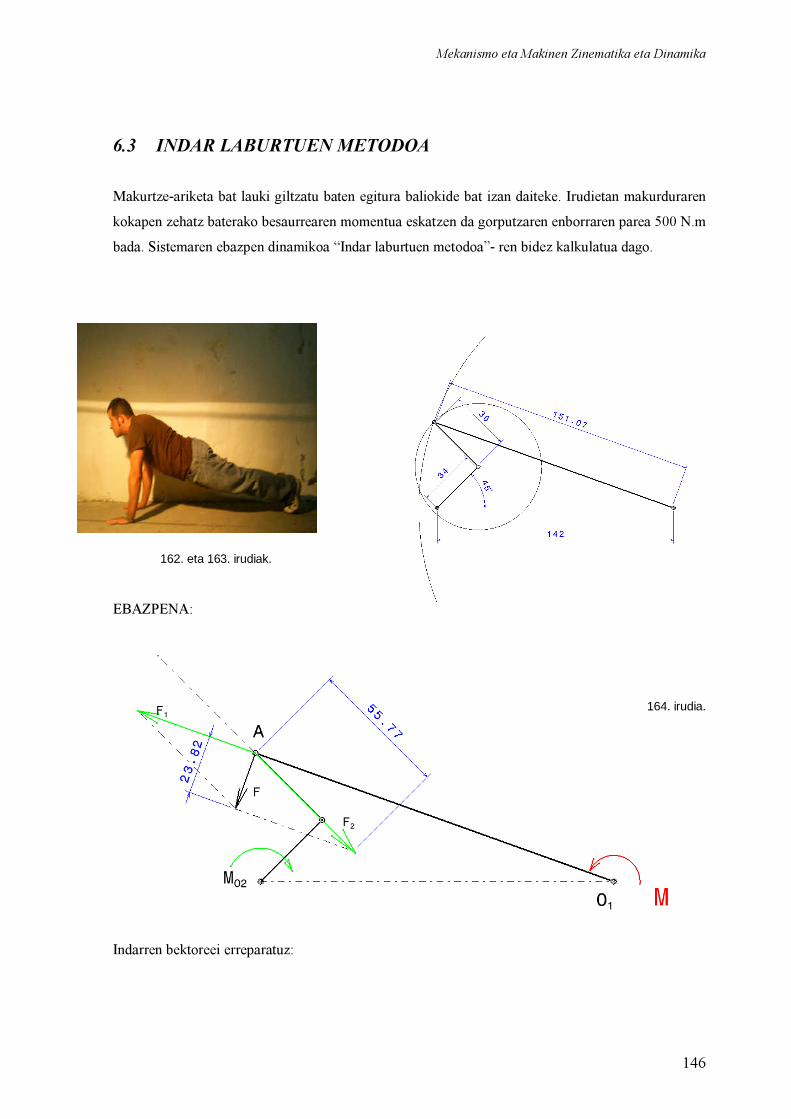
Mekanismo eta Makinen Zinematika eta Dinamika
146
6.3 INDAR LABURTUEN METODOA Makurtze-ariketa bat lauki giltzatu baten egitura baliokide bat izan daiteke. Irudietan makurduraren kokapen zehatz baterako besaurrearen momentua eskatzen da gorputzaren enborraren parea 500 N.m bada. Sistemaren ebazpen dinamikoa “Indar laburtuen metodoa”- ren bidez kalkulatua dago.
162. eta 163. irudiak.
EBAZPENA:
164. irudia.
Indarren bektoreei erreparatuz:
Mekanismo eta Makinen Zinematika eta Dinamika
147
NAO
MFA 3311007,151500
21
=⋅
==−
Orain, eskala egokiarekin:
NF 7742 = Ondorioz:
NMO 26334,07742 =⋅=
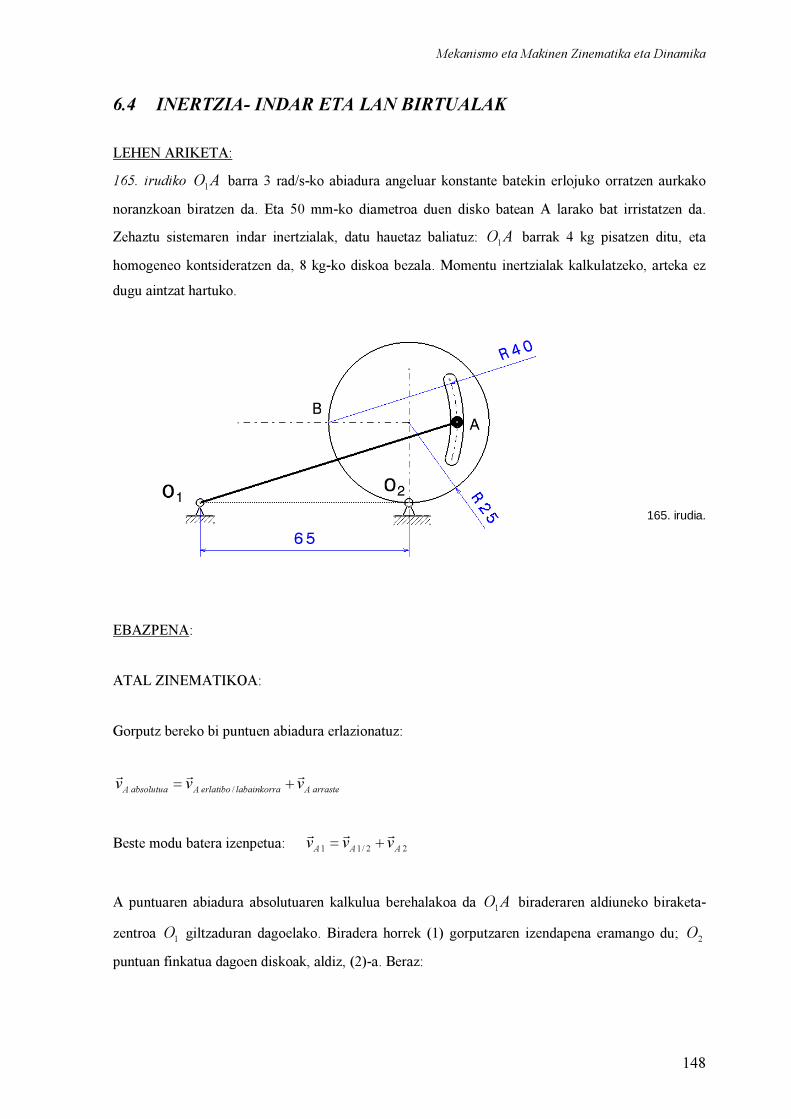
Mekanismo eta Makinen Zinematika eta Dinamika
148
6.4 INERTZIA- INDAR ETA LAN BIRTUALAK LEHEN ARIKETA: 165. irudiko AO1 barra 3 rad/s-ko abiadura angeluar konstante batekin erlojuko orratzen aurkako noranzkoan biratzen da. Eta 50 mm-ko diametroa duen disko batean A larako bat irristatzen da. Zehaztu sistemaren indar inertzialak, datu hauetaz baliatuz: AO1 barrak 4 kg pisatzen ditu, eta homogeneo kontsideratzen da, 8 kg-ko diskoa bezala. Momentu inertzialak kalkulatzeko, arteka ez dugu aintzat hartuko.
165. irudia. EBAZPENA: ATAL ZINEMATIKOA: Gorputz bereko bi puntuen abiadura erlazionatuz:
arrasteAalabainkorrerlatiboAabsolutuaA vvvrrr
+= / Beste modu batera izenpetua: 22/11 AAA vvv
rrr
+= A puntuaren abiadura absolutuaren kalkulua berehalakoa da AO1 biraderaren aldiuneko biraketa-zentroa 1O giltzaduran dagoelako. Biradera horrek (1) gorputzaren izendapena eramango du; 2O puntuan finkatua dagoen diskoak, aldiz, (2)-a. Beraz:
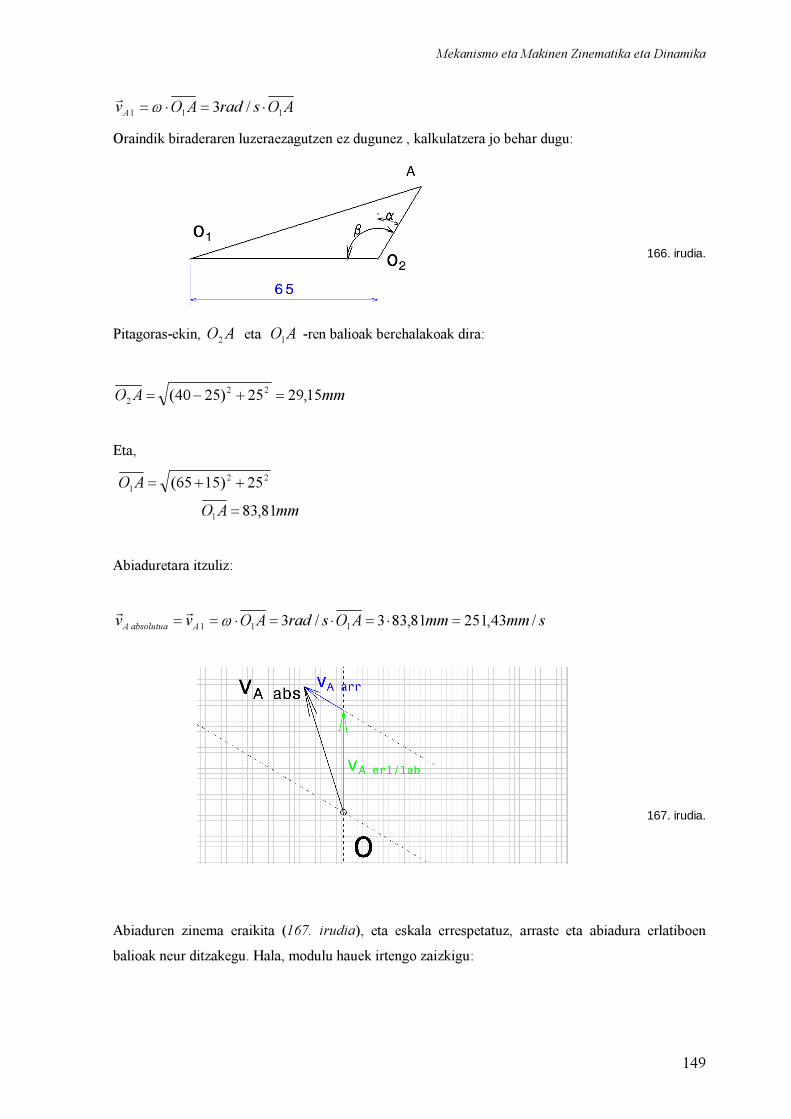
Mekanismo eta Makinen Zinematika eta Dinamika
149
AOsradAOvA 111 /3 ⋅=⋅=ωr Oraindik biraderaren luzeraezagutzen ez dugunez , kalkulatzera jo behar dugu:
166. irudia. Pitagoras-ekin, AO2 eta AO1 -ren balioak berehalakoak dira:
mmAO 15,2925)2540( 222 =+−=
Eta,
mmAO
AO81,83
25)1565(1
221
=
++=
Abiaduretara itzuliz:
smmmmAOsradAOvv AabsolutuaA /43,25181,833/3 111 =⋅=⋅=⋅== ωrr
167. irudia. Abiaduren zinema eraikita (167. irudia), eta eskala errespetatuz, arraste eta abiadura erlatiboen balioak neur ditzakegu. Hala, modulu hauek irtengo zaizkigu:

Mekanismo eta Makinen Zinematika eta Dinamika
150
smmv
smmv
arrasteA
erlatiboA
/8,87/7,194
=
=
r
r
Orain, azelerazioetarako, A larakoaren eta disko artekatuaren arteko labainketa-erlazioa adierazten duen ekuazioa interpretatzen jakin behar da:
coriolisarrasteAalabainkorrerlatiboAabsolutuaA aaaa ++= /rr
edo, 2/1222/11 2 AAAA vaaa
rrrr
∧++= ω Orain labainketaren ekuazio orokorra deskonposatuz:
erlatiboaAarrastearrasteAarrasteAerlatiboaAerlatiboaAabsolutuaAabsolutuaA vtntntnr
rr
rr
rr
∧++++=+ ω2 Berehala:
( ) 22
12 /29,75481,83/3 smmmmsradAOtna absolutuaAabsolutuaAabsolutuaA ==⋅=/+= ω
rrr
Sarrera-datua, datu zinematikoa, edoω abiadura angeluarra konstantea denez, tangentzial absolutua nulua kontsideratuko dugu; beraz, azelerazio absolutua osagai normalera laburtua geratuko da. Besteak:
( ) ( ) 222
/70,94740/7,194 smm
mmsmm
ABvn erlatiboaA
erlatiboaA ===r
erlatiboaAtr bektorearen norabidea ezaguna izango da, zuta bere normalarekiko eta abiadura erlatiboaren norabide berekoa, hau da, mekanismoaren antolamendura begiratzen badugu, bertikala. Baina guztiz definitu gabeko azelerazioa da.
( ) ( ) ( ) 22
2
2
2
2
/45,26415,29/8,87 smm
mmsmm
AOv
AIv
n arrasteAarrasteAarrasteA ====
r
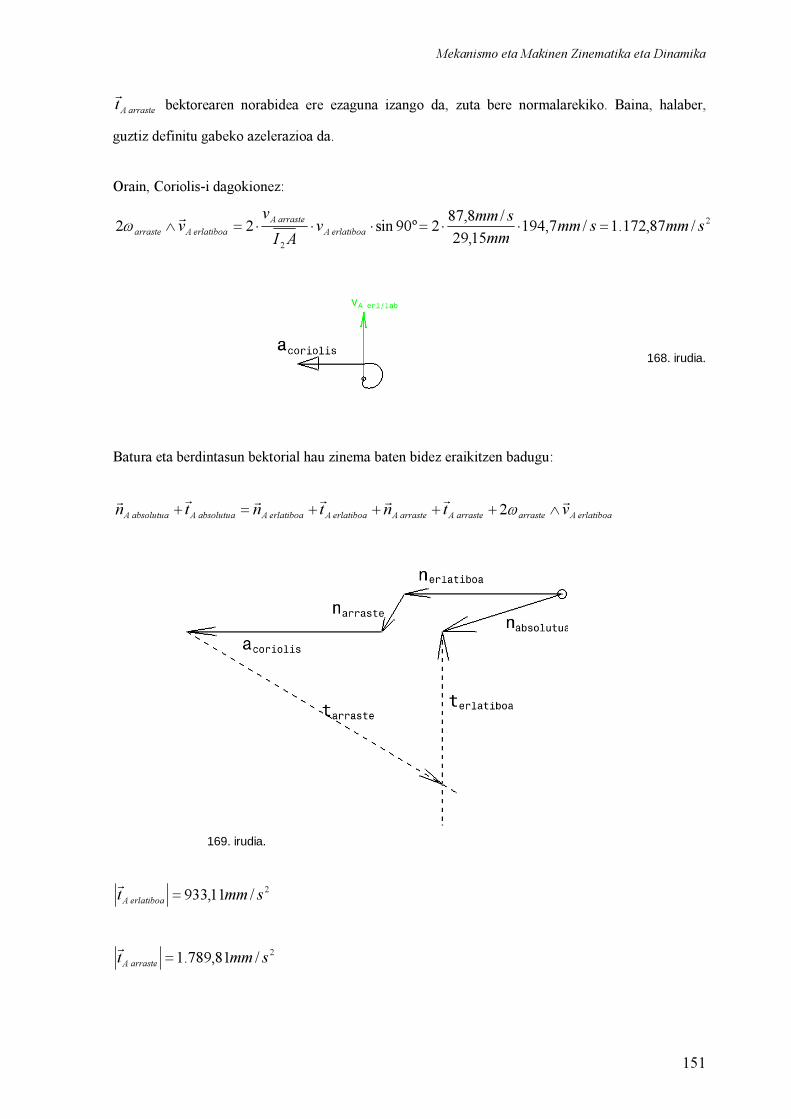
Mekanismo eta Makinen Zinematika eta Dinamika
151
arrasteAtr bektorearen norabidea ere ezaguna izango da, zuta bere normalarekiko. Baina, halaber, guztiz definitu gabeko azelerazioa da. Orain, Coriolis-i dagokionez:
2
2
/87,172.1/7,19415,29/8,872º90sin22 smmsmm
mmsmmv
AIv
v erlatiboaAarrasteA
erlatiboaAarraste =⋅⋅=⋅⋅⋅=∧r
ω
168. irudia. Batura eta berdintasun bektorial hau zinema baten bidez eraikitzen badugu:
erlatiboaAarrastearrasteAarrasteAerlatiboaAerlatiboaAabsolutuaAabsolutuaA vtntntnr
rr
rr
rr
∧++++=+ ω2
169. irudia.
2/11,933 smmt erlatiboaA =r
2/81,789.1 smmt arrasteA =
r
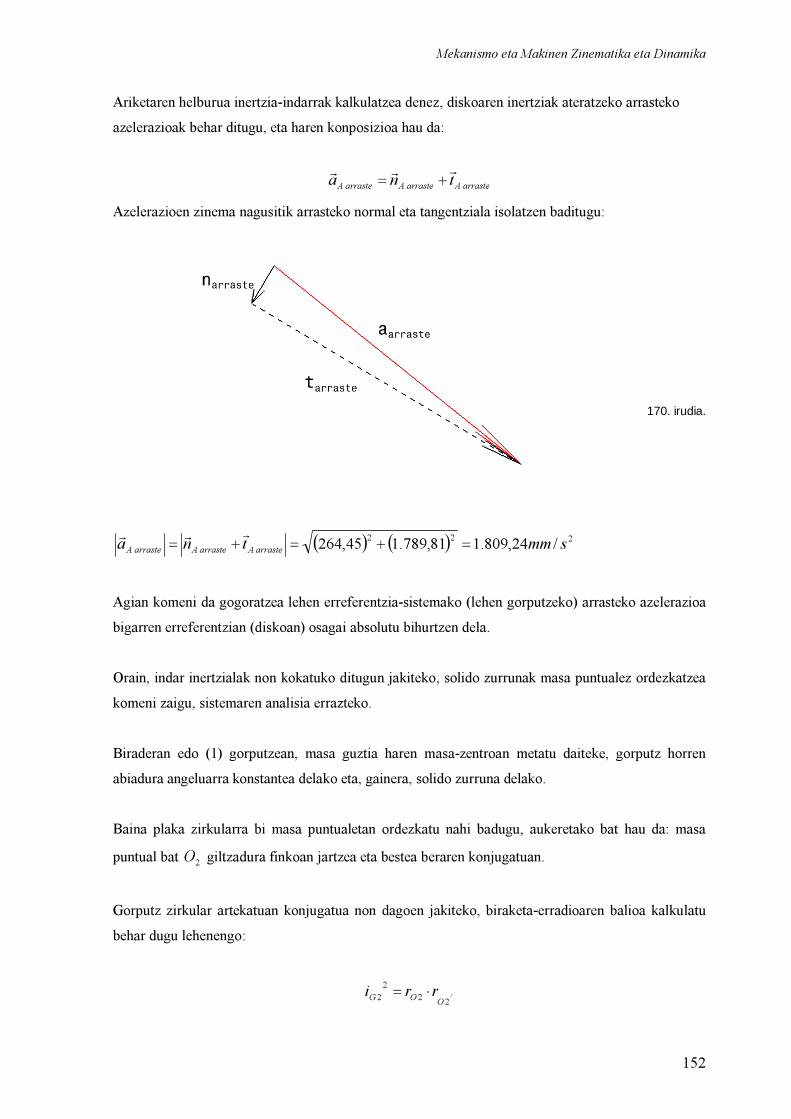
Mekanismo eta Makinen Zinematika eta Dinamika
152
Ariketaren helburua inertzia-indarrak kalkulatzea denez, diskoaren inertziak ateratzeko arrasteko azelerazioak behar ditugu, eta haren konposizioa hau da:
arrasteAarrasteAarrasteA tnar
rr
+= Azelerazioen zinema nagusitik arrasteko normal eta tangentziala isolatzen baditugu:
170. irudia.
( ) ( ) 222 /24,809.181,789.145,264 smmtna arrasteAarrasteAarrasteA =+=+=r
rr Agian komeni da gogoratzea lehen erreferentzia-sistemako (lehen gorputzeko) arrasteko azelerazioa bigarren erreferentzian (diskoan) osagai absolutu bihurtzen dela. Orain, indar inertzialak non kokatuko ditugun jakiteko, solido zurrunak masa puntualez ordezkatzea komeni zaigu, sistemaren analisia errazteko. Biraderan edo (1) gorputzean, masa guztia haren masa-zentroan metatu daiteke, gorputz horren abiadura angeluarra konstantea delako eta, gainera, solido zurruna delako. Baina plaka zirkularra bi masa puntualetan ordezkatu nahi badugu, aukeretako bat hau da: masa puntual bat 2O giltzadura finkoan jartzea eta bestea beraren konjugatuan. Gorputz zirkular artekatuan konjugatua non dagoen jakiteko, biraketa-erradioaren balioa kalkulatu behar dugu lehenengo:
'̀22
22 OOG rri ⋅=
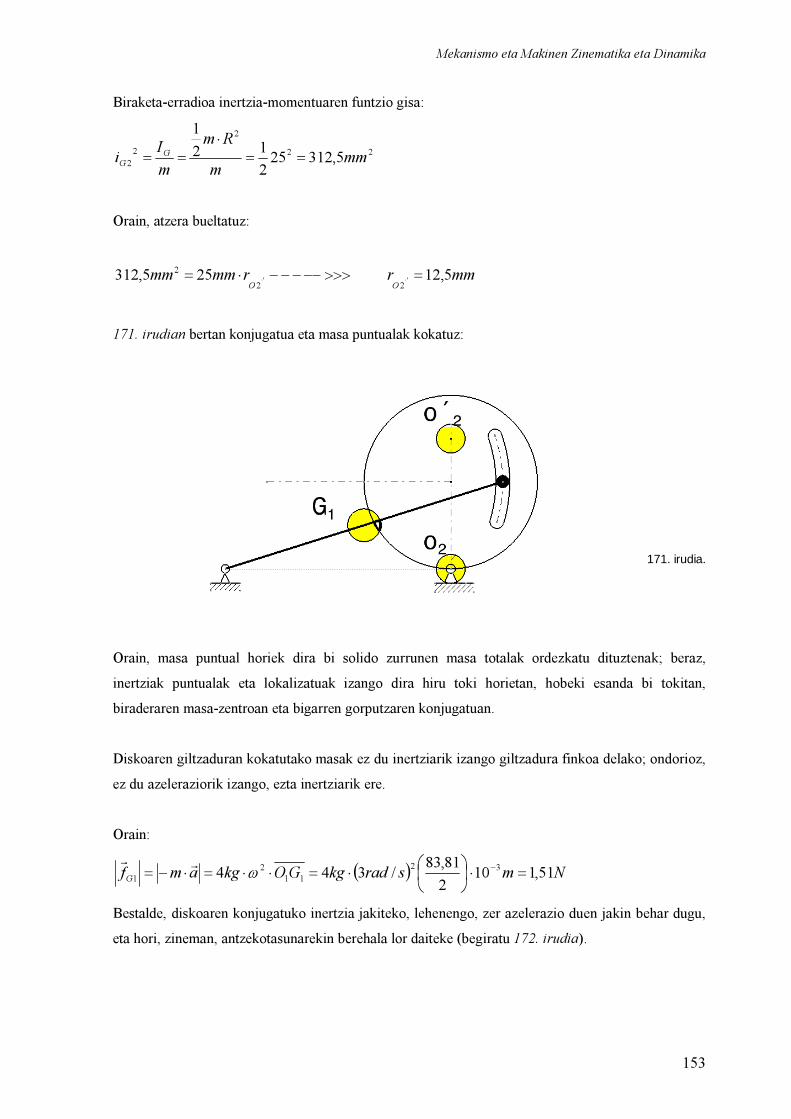
Mekanismo eta Makinen Zinematika eta Dinamika
153
Biraketa-erradioa inertzia-momentuaren funtzio gisa:
22
2
22 5,312252
121
mmm
Rm
mIi G
G ==
⋅
== Orain, atzera bueltatuz:
mmrrmmmmOO
5,12255,312 '`'̀22
2 =>>>−−−−−⋅= 171. irudian bertan konjugatua eta masa puntualak kokatuz:
171. irudia. Orain, masa puntual horiek dira bi solido zurrunen masa totalak ordezkatu dituztenak; beraz, inertziak puntualak eta lokalizatuak izango dira hiru toki horietan, hobeki esanda bi tokitan, biraderaren masa-zentroan eta bigarren gorputzaren konjugatuan. Diskoaren giltzaduran kokatutako masak ez du inertziarik izango giltzadura finkoa delako; ondorioz, ez du azeleraziorik izango, ezta inertziarik ere. Orain:
( ) NmsradkgGOkgamfG 51,110281,83/344 32
112
1 =⋅
⋅=⋅⋅=⋅−= −ωr
r Bestalde, diskoaren konjugatuko inertzia jakiteko, lehenengo, zer azelerazio duen jakin behar dugu, eta hori, zineman, antzekotasunarekin berehala lor daiteke (begiratu 172. irudia).
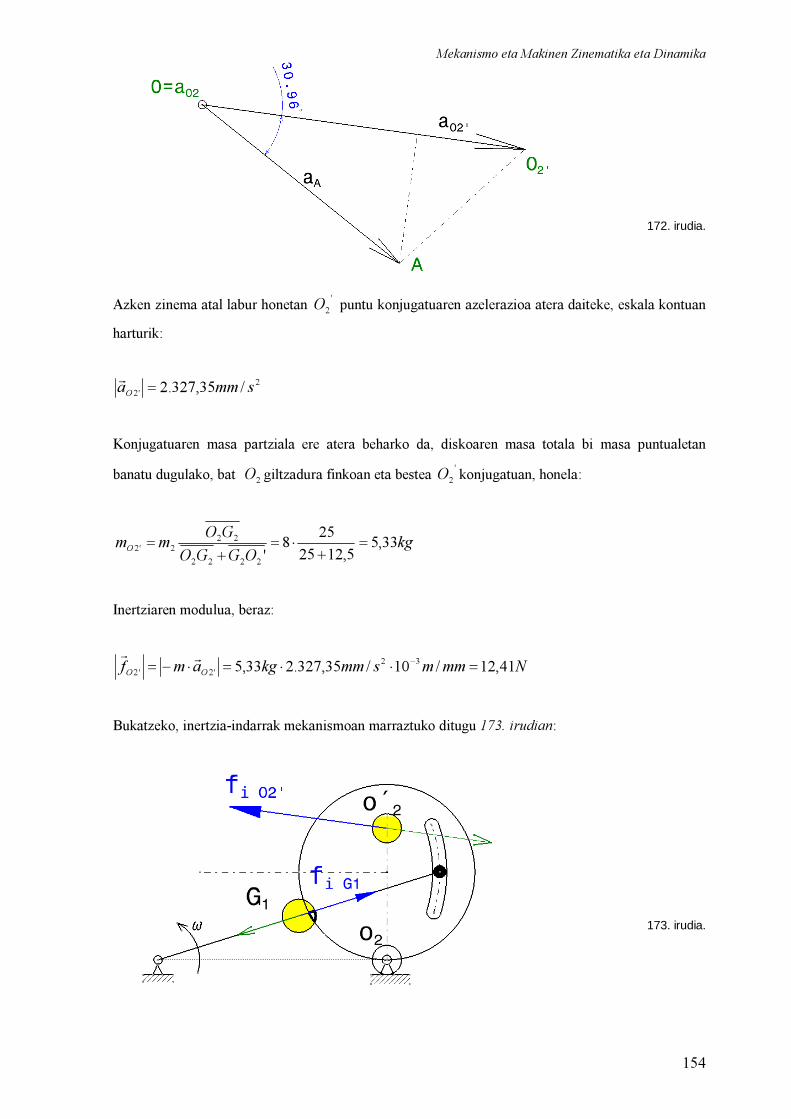
Mekanismo eta Makinen Zinematika eta Dinamika
154
172. irudia. Azken zinema atal labur honetan '
2O puntu konjugatuaren azelerazioa atera daiteke, eskala kontuan harturik:
2'2 /35,327.2 smmaO =
r Konjugatuaren masa partziala ere atera beharko da, diskoaren masa totala bi masa puntualetan banatu dugulako, bat 2O giltzadura finkoan eta bestea '
2O konjugatuan, honela:
kgOGGOGOmmO 33,55,1225
258'2222
222'2 =
+⋅=
+=
Inertziaren modulua, beraz:
Nmmmsmmkgamf OO 41,12/10/35,327.233,5 32'2'2 =⋅⋅=⋅−=
−r
r Bukatzeko, inertzia-indarrak mekanismoan marraztuko ditugu 173. irudian:
173. irudia.

Mekanismo eta Makinen Zinematika eta Dinamika
155
Biraderan, ω abiadura angeluar baten eraginagatik, eta mekanismoan, geometria zehatz batzuetako masen eraginez, bi inertzia hauek irten zaizkigu: '2Oif
r eta 1Gifr (urdinez marraztutako bektoreak).
Eta berdez marraztutako bektoreak masa puntualen azelerazioak dira, indarren norabide berean baina alderantzizko noranzkoan.
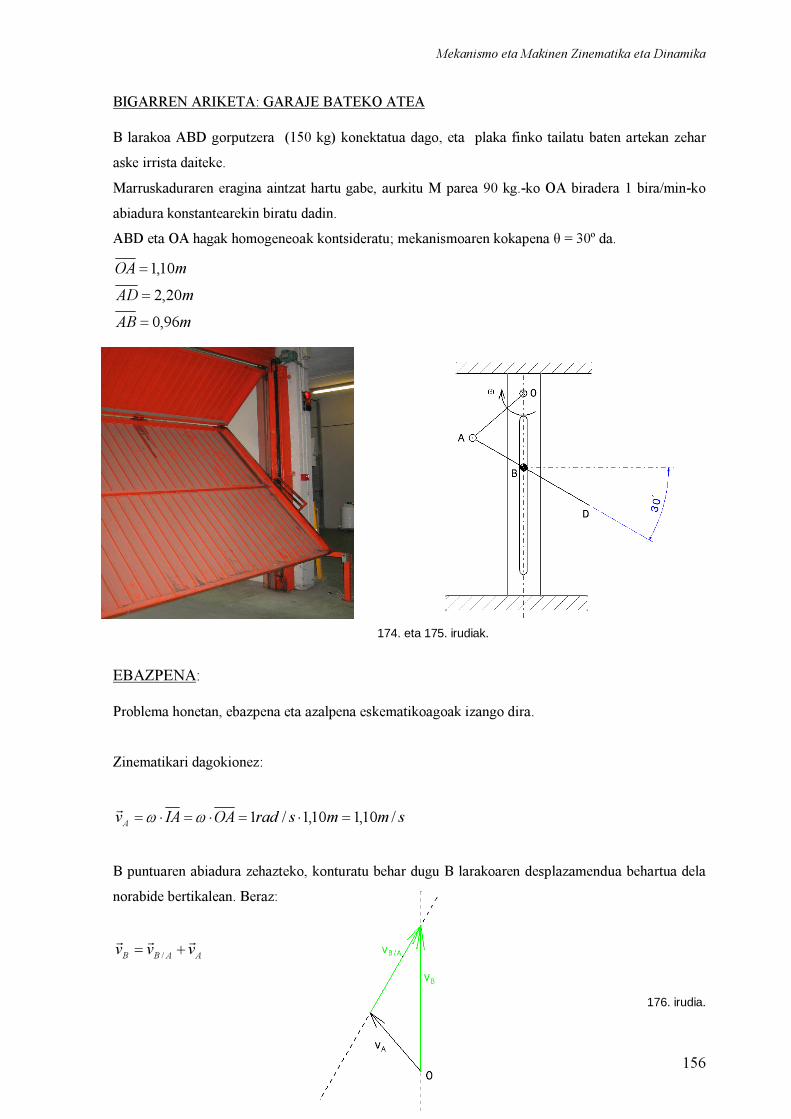
Mekanismo eta Makinen Zinematika eta Dinamika
156
BIGARREN ARIKETA: GARAJE BATEKO ATEA B larakoa ABD gorputzera (150 kg) konektatua dago, eta plaka finko tailatu baten artekan zehar aske irrista daiteke. Marruskaduraren eragina aintzat hartu gabe, aurkitu M parea 90 kg.-ko OA biradera 1 bira/min-ko abiadura konstantearekin biratu dadin. ABD eta OA hagak homogeneoak kontsideratu; mekanismoaren kokapena θ = 30º da.
mABmADmOA
96,020,210,1
=
=
=
174. eta 175. irudiak.
EBAZPENA: Problema honetan, ebazpena eta azalpena eskematikoagoak izango dira. Zinematikari dagokionez:
smmsradOAIAvA /10,110,1/1 =⋅=⋅=⋅= ωωr B puntuaren abiadura zehazteko, konturatu behar dugu B larakoaren desplazamendua behartua dela norabide bertikalean. Beraz:
AABB vvvrrr
+= /
176. irudia.

Mekanismo eta Makinen Zinematika eta Dinamika
157
Abiaduren zinema honetatik (176. irudia) eta behar den eskalan:
smv
smv
AB
B
/53,1/08,2
/ =
=
Mekanismo eta zinemaren antzekotasunagatik, Dv aterako dugu. smvD /80,3=
177. irudia.
Azelerazioei dagokienez, B larakoaren osagaia bertikala izango da, eta A puntukoa honela lortuko da:
( ) 222 /1,11,1/1 smmsradIAaA =⋅=⋅=ωr
ABD bielako puntuen arteko erlazioagatik:
AABABB
AABB
atna
aaar
rrr
rrr
++=
+=
//
/
( ) ( ) 2
22/
/ /44,296,0/53,1 smmsm
ABvn AB
AB ===
r
r
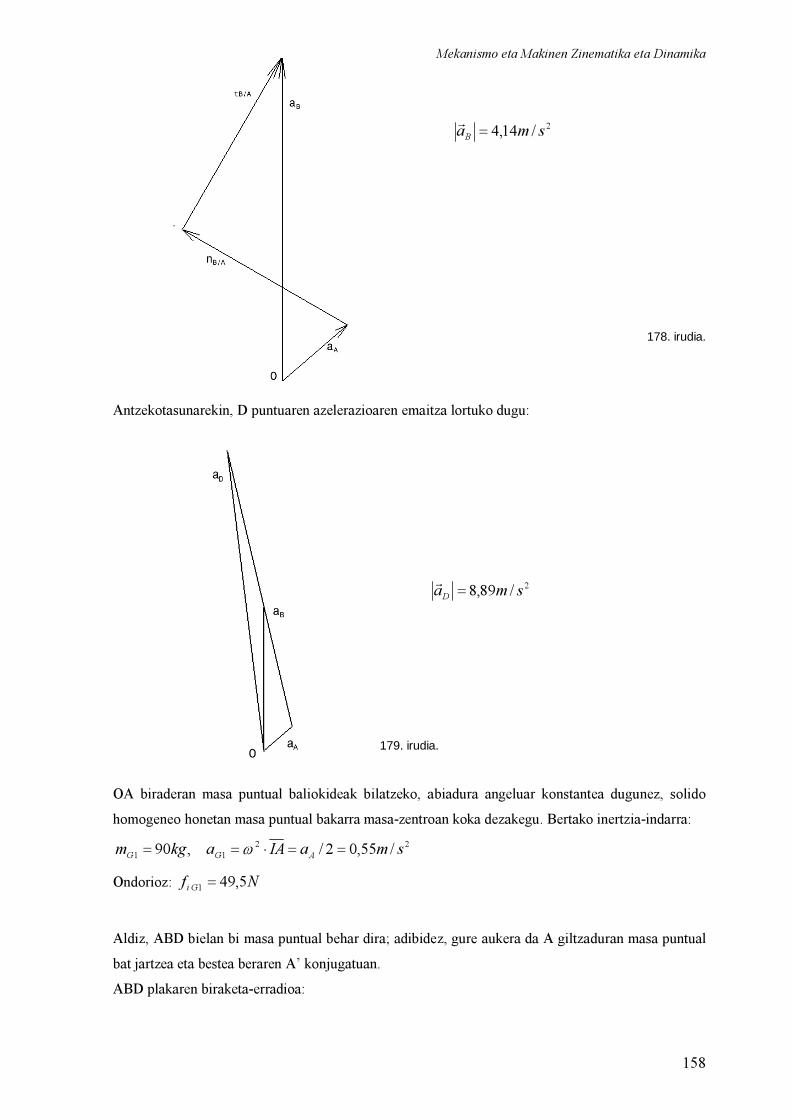
Mekanismo eta Makinen Zinematika eta Dinamika
158
2/14,4 smaB =
r
178. irudia. Antzekotasunarekin, D puntuaren azelerazioaren emaitza lortuko dugu: 2/89,8 smaD =
r
179. irudia. OA biraderan masa puntual baliokideak bilatzeko, abiadura angeluar konstantea dugunez, solido homogeneo honetan masa puntual bakarra masa-zentroan koka dezakegu. Bertako inertzia-indarra:
2211 /55,02/,90 smaIAakgm AGG ==⋅== ω
Ondorioz: Nf Gi 5,491 = Aldiz, ABD bielan bi masa puntual behar dira; adibidez, gure aukera da A giltzaduran masa puntual bat jartzea eta bestea beraren A’ konjugatuan. ABD plakaren biraketa-erradioa:

Mekanismo eta Makinen Zinematika eta Dinamika
159
mlAGlAGl
mIAGAGi G
G
37,02,261
61'12/1'2/1
'
22
2
2
222
2
====⋅
=⋅=
Masa puntualen balioak
kgmkgAGAG
AGmm
A
A
24,11276,37150
76,3737,01,137,0150'
'
'
22
22
=−=
=+
=+
⋅=
Orain, konjugatua kokatuta eta masa puntual baliokideak lortuta, konjugatuaren azelerazioa zineman zentratuko dugu. 2
' /15,6 smaA =r
180. irudia. Beraz: Nsmkgamf AAAi 16,690/15,624,112 2
''' =⋅=⋅=r
r
Namf AAAi 536,411,176,37 =⋅=⋅=r
r
A puntuaren konjugatuaren —hau da, A’ puntuaren— abiadura antzekotasunarekin distantzia proportzionalak bilatuz atera daiteke. Kasu honetan:
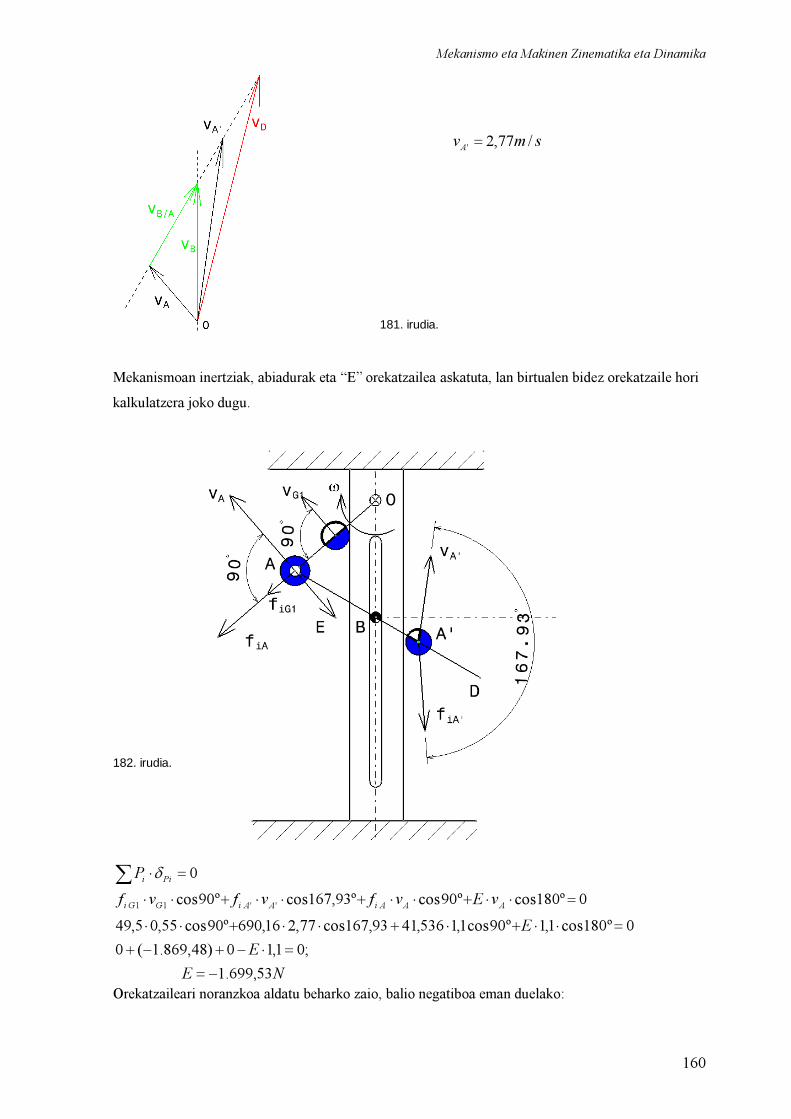
Mekanismo eta Makinen Zinematika eta Dinamika
160
smvA /77,2' =
181. irudia. Mekanismoan inertziak, abiadurak eta “E” orekatzailea askatuta, lan birtualen bidez orekatzaile hori kalkulatzera joko dugu. 182. irudia.
NEE
EvEvfvfvf
PAAAiAAiGGi
Pii
53,699.1;01,10)48,869.1(0
0º180cos1,1º90cos1,1536,4193,167cos77,216,690º90cos55,05,490º180cosº90cosº93,167cosº90cos
0''11
−=
=⋅−+−+
=⋅⋅+⋅+⋅⋅+⋅⋅
=⋅⋅+⋅⋅+⋅⋅+⋅⋅
=⋅∑ δ
Orekatzaileari noranzkoa aldatu beharko zaio, balio negatiboa eman duelako:
Mekanismo eta Makinen Zinematika eta Dinamika
161
Parea, beraz:
( )tzeskuineranmNM
IAEM
⋅=
⋅=⋅=
48,869.1
1,153,699.1
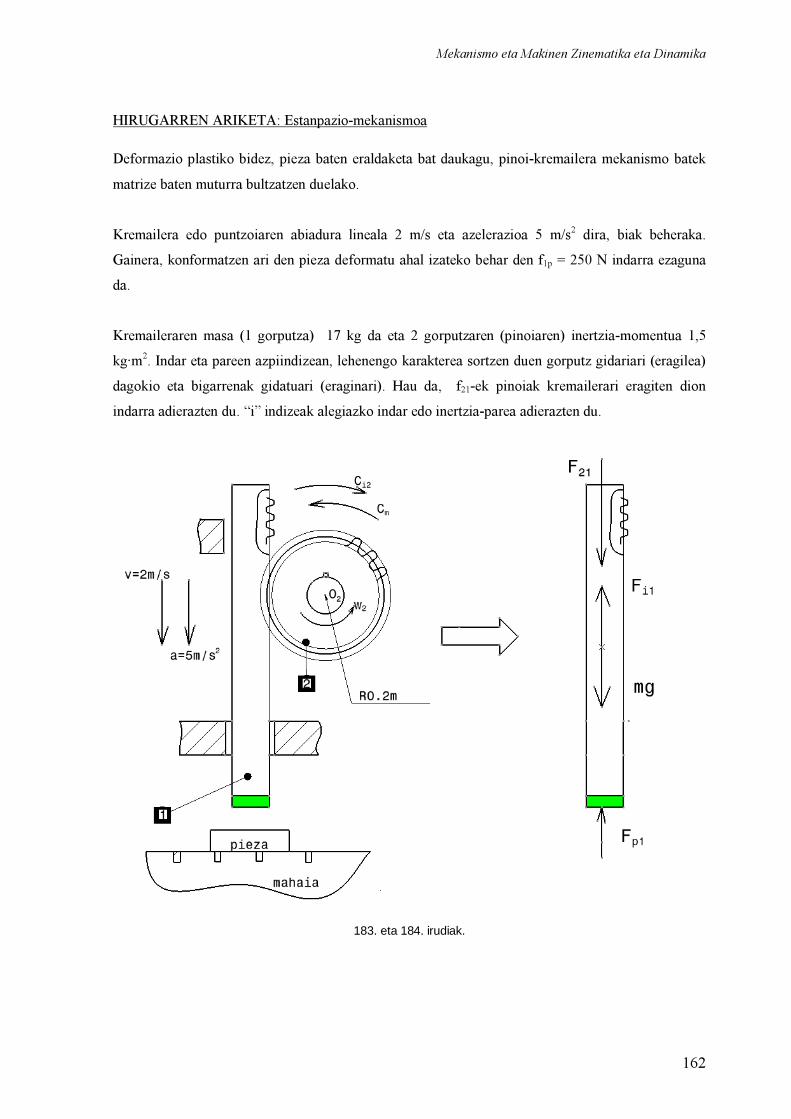
Mekanismo eta Makinen Zinematika eta Dinamika
162
HIRUGARREN ARIKETA: Estanpazio-mekanismoa Deformazio plastiko bidez, pieza baten eraldaketa bat daukagu, pinoi-kremailera mekanismo batek matrize baten muturra bultzatzen duelako. Kremailera edo puntzoiaren abiadura lineala 2 m/s eta azelerazioa 5 m/s2 dira, biak beheraka. Gainera, konformatzen ari den pieza deformatu ahal izateko behar den f1p = 250 N indarra ezaguna da. Kremaileraren masa (1 gorputza) 17 kg da eta 2 gorputzaren (pinoiaren) inertzia-momentua 1,5 kg·m2. Indar eta pareen azpiindizean, lehenengo karakterea sortzen duen gorputz gidariari (eragilea) dagokio eta bigarrenak gidatuari (eraginari). Hau da, f21-ek pinoiak kremailerari eragiten dion indarra adierazten du. “i” indizeak alegiazko indar edo inertzia-parea adierazten du.
183. eta 184. irudiak.

Mekanismo eta Makinen Zinematika eta Dinamika
163
EBAZPENA: (1) gorputza isolatzera joko dugu, haren gainean eragiten duten indar guztiak agerian usteko asmoz. Indar guztiak lerrokatuak daudela joko dugu, nahiz eta guztiak ez izan, bastidoreko erreakzioek hartuak izango direlako mugimenduarekiko zutak diren akzioak, baina haiek ez diote eragiten analisiari. D’ Alambert-en printzipioaren arabera, Newton-en 2. legea honela moldatuko da: ∑ ⋅= amF ∑ =⋅− 0amF
am ⋅− inertzia-indarra dela eta: ∑ =+ 0ifF eta gure kasuan oreka-ekuazioan, indar bertikalen batura:
01211 =⋅−+− gmfff ip Non osagai ezagunak hauek baitira:
NfNsmkggmNsmkgamf
p
i
2506,166/8,91785/517
1
22
=
=⋅=⋅=⋅=⋅= Ondorioz, Nf 4,16821 = emango du beherantz. Orain, piñoiak kremaileraren gainean egin behar duen indarra ezagutzen dugu; beraz, hurrengo pausoa pare eragilea zehaztea izango da. Pare horrek 21f sortzeko pare nahikoa eragin beharko du, baita (2) gorputzaren inertzia gainditzeko ere. Aurrekoaren planteamendu antzekoa egingo dugu, engranajea edo pinoia isolatuz. Horretarako, motor-pareak, inertzia-pareak eta kremailerak pinoian sortzen duen momentua hartu behar dira kontuan.

Mekanismo eta Makinen Zinematika eta Dinamika
164
185. irudia. Indarren oreka egin dugun antzera eta alegiazko inertzia-parea sartuz, ∑ ⋅= αIM , pareen oreka planteatuko dugu:
∑ = 0: 2OMOrekan Beraz: 0212 =++− im CCC hau da: 02212 =+⋅+− im CRfC non pinoiaren inertzia-parea: 222 α⋅= ICi Bi transmisio elementu bakarrik ditugunez, hau da, pinoia eta kremailera, nahiz eta gorputz batean errotazioa izan eta bestean translazioa, irudiko istantean pinoiaren jatorrizko zirkunferentzian azelerazio tangentzial bat izango dugu, kremaileraren azelerazio lineal berekoa. Gogoratuz azelerazio angeluarrak 2
2
22 /252,0
/5 sradmsm
Ra
===α . Beraz:
0255,12,04,168 =⋅+⋅+− mC Balioak ordezkatuz: )(18,71 noranzkoanaurkakoorratzenerlojukomNCm ⋅=
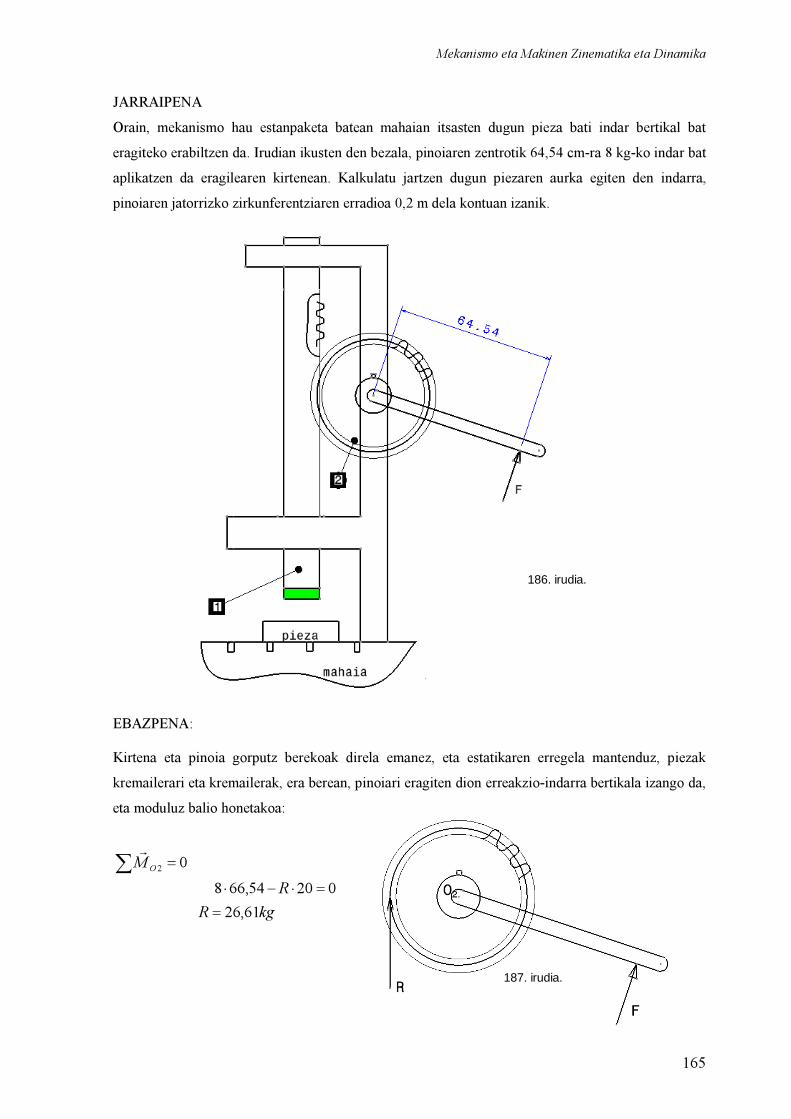
Mekanismo eta Makinen Zinematika eta Dinamika
165
JARRAIPENA Orain, mekanismo hau estanpaketa batean mahaian itsasten dugun pieza bati indar bertikal bat eragiteko erabiltzen da. Irudian ikusten den bezala, pinoiaren zentrotik 64,54 cm-ra 8 kg-ko indar bat aplikatzen da eragilearen kirtenean. Kalkulatu jartzen dugun piezaren aurka egiten den indarra, pinoiaren jatorrizko zirkunferentziaren erradioa 0,2 m dela kontuan izanik. 186. irudia. EBAZPENA: Kirtena eta pinoia gorputz berekoak direla emanez, eta estatikaren erregela mantenduz, piezak kremailerari eta kremailerak, era berean, pinoiari eragiten dion erreakzio-indarra bertikala izango da, eta moduluz balio honetakoa:
kgRR
MO
61,2602054,668
02
=
=⋅−⋅
=∑ r
187. irudia.
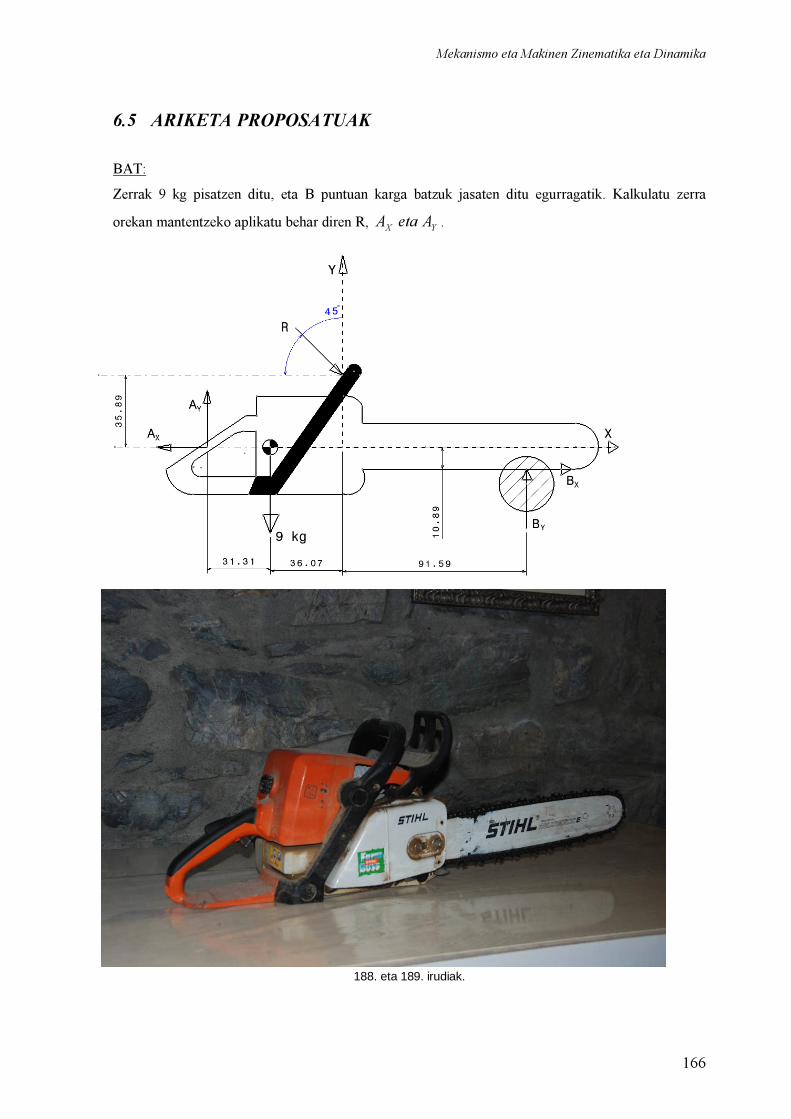
Mekanismo eta Makinen Zinematika eta Dinamika
166
6.5 ARIKETA PROPOSATUAK BAT: Zerrak 9 kg pisatzen ditu, eta B puntuan karga batzuk jasaten ditu egurragatik. Kalkulatu zerra orekan mantentzeko aplikatu behar diren R, YX AetaA .
188. eta 189. irudiak.
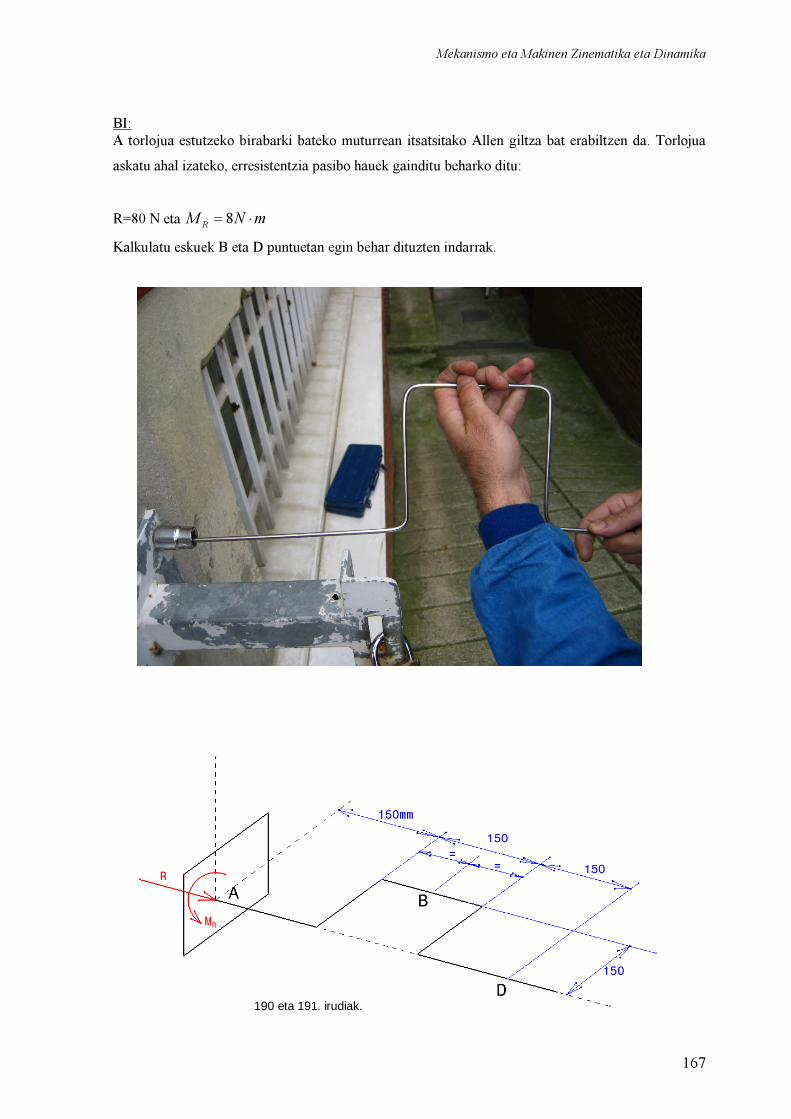
Mekanismo eta Makinen Zinematika eta Dinamika
167
BI: A torlojua estutzeko birabarki bateko muturrean itsatsitako Allen giltza bat erabiltzen da. Torlojua askatu ahal izateko, erresistentzia pasibo hauek gainditu beharko ditu: R=80 N eta mNM R ⋅= 8 Kalkulatu eskuek B eta D puntuetan egin behar dituzten indarrak.
190 eta 191. irudiak.
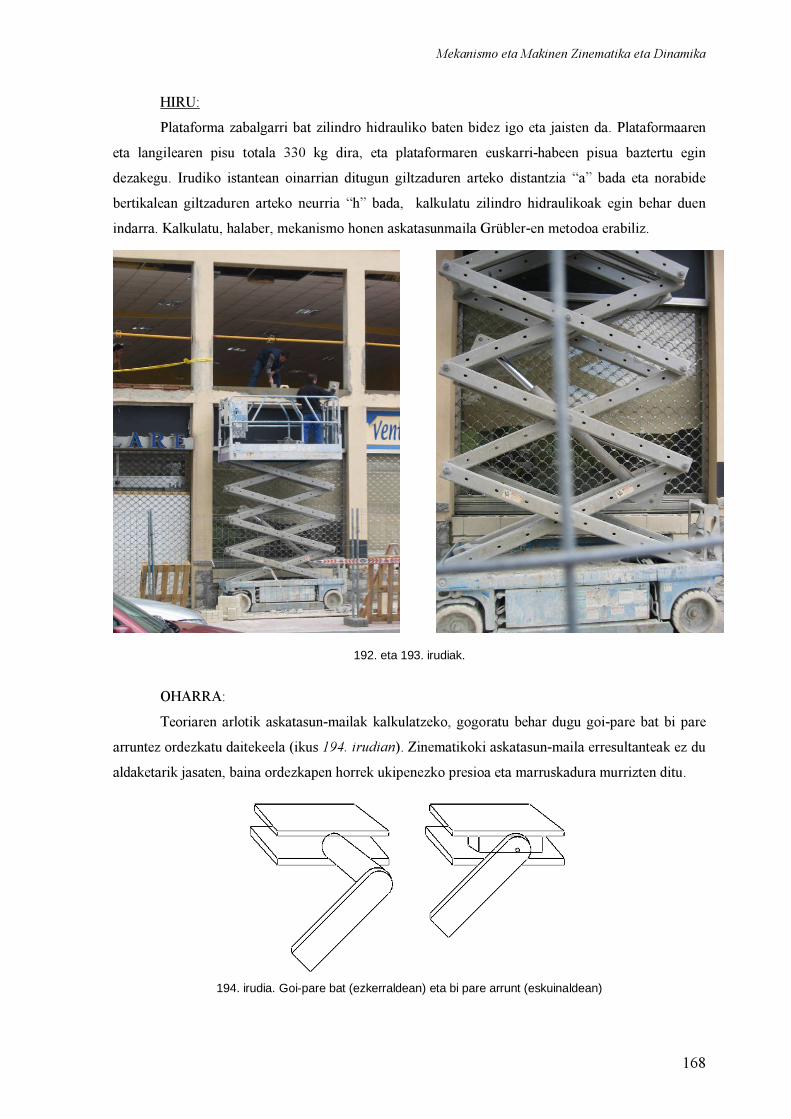
Mekanismo eta Makinen Zinematika eta Dinamika
168
HIRU: Plataforma zabalgarri bat zilindro hidrauliko baten bidez igo eta jaisten da. Plataformaaren
eta langilearen pisu totala 330 kg dira, eta plataformaren euskarri-habeen pisua baztertu egin dezakegu. Irudiko istantean oinarrian ditugun giltzaduren arteko distantzia “a” bada eta norabide bertikalean giltzaduren arteko neurria “h” bada, kalkulatu zilindro hidraulikoak egin behar duen indarra. Kalkulatu, halaber, mekanismo honen askatasunmaila Grübler-en metodoa erabiliz.
192. eta 193. irudiak. OHARRA: Teoriaren arlotik askatasun-mailak kalkulatzeko, gogoratu behar dugu goi-pare bat bi pare
arruntez ordezkatu daitekeela (ikus 194. irudian). Zinematikoki askatasun-maila erresultanteak ez du aldaketarik jasaten, baina ordezkapen horrek ukipenezko presioa eta marruskadura murrizten ditu.
194. irudia. Goi-pare bat (ezkerraldean) eta bi pare arrunt (eskuinaldean)
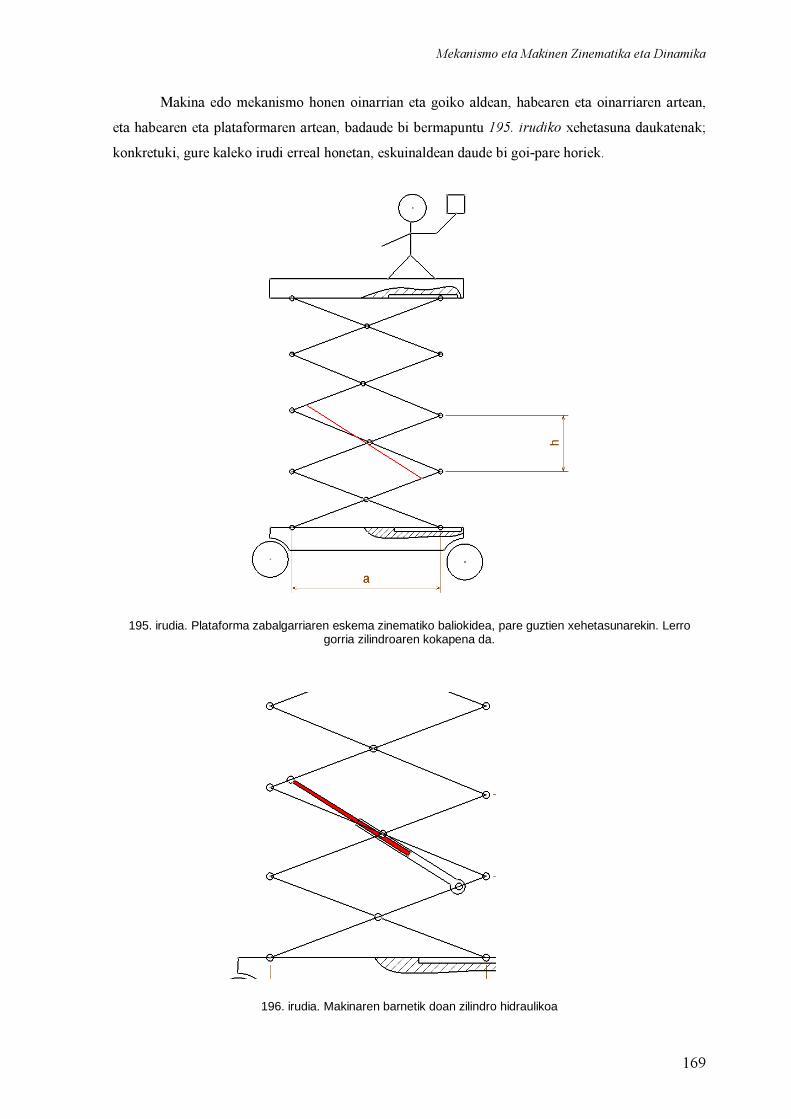
Mekanismo eta Makinen Zinematika eta Dinamika
169
Makina edo mekanismo honen oinarrian eta goiko aldean, habearen eta oinarriaren artean, eta habearen eta plataformaren artean, badaude bi bermapuntu 195. irudiko xehetasuna daukatenak; konkretuki, gure kaleko irudi erreal honetan, eskuinaldean daude bi goi-pare horiek.
195. irudia. Plataforma zabalgarriaren eskema zinematiko baliokidea, pare guztien xehetasunarekin. Lerro gorria zilindroaren kokapena da.
196. irudia. Makinaren barnetik doan zilindro hidraulikoa
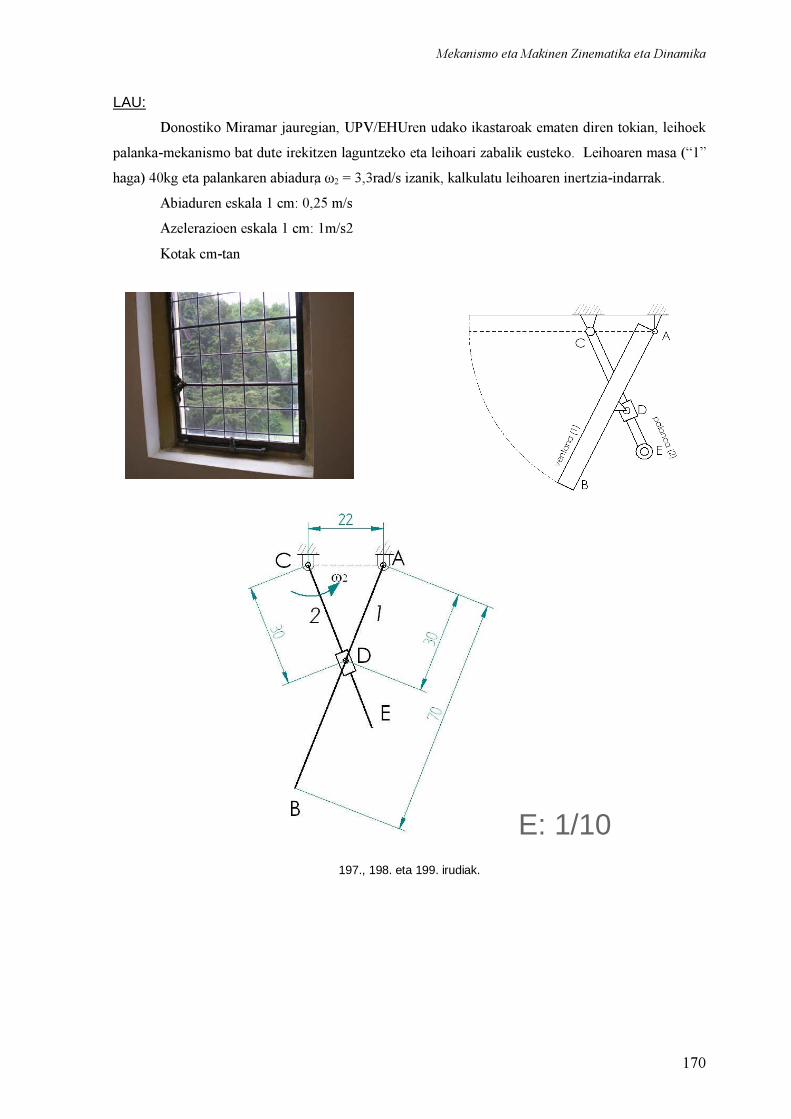
Mekanismo eta Makinen Zinematika eta Dinamika
170
LAU:
Donostiko Miramar jauregian, UPV/EHUren udako ikastaroak ematen diren tokian, leihoek palanka-mekanismo bat dute irekitzen laguntzeko eta leihoari zabalik eusteko. Leihoaren masa (“1” haga) 40kg eta palankaren abiadura ω2 = 3,3rad/s izanik, kalkulatu leihoaren inertzia-indarrak.
Abiaduren eskala 1 cm: 0,25 m/s Azelerazioen eskala 1 cm: 1m/s2 Kotak cm-tan
197., 198. eta 199. irudiak.
E: 1/10
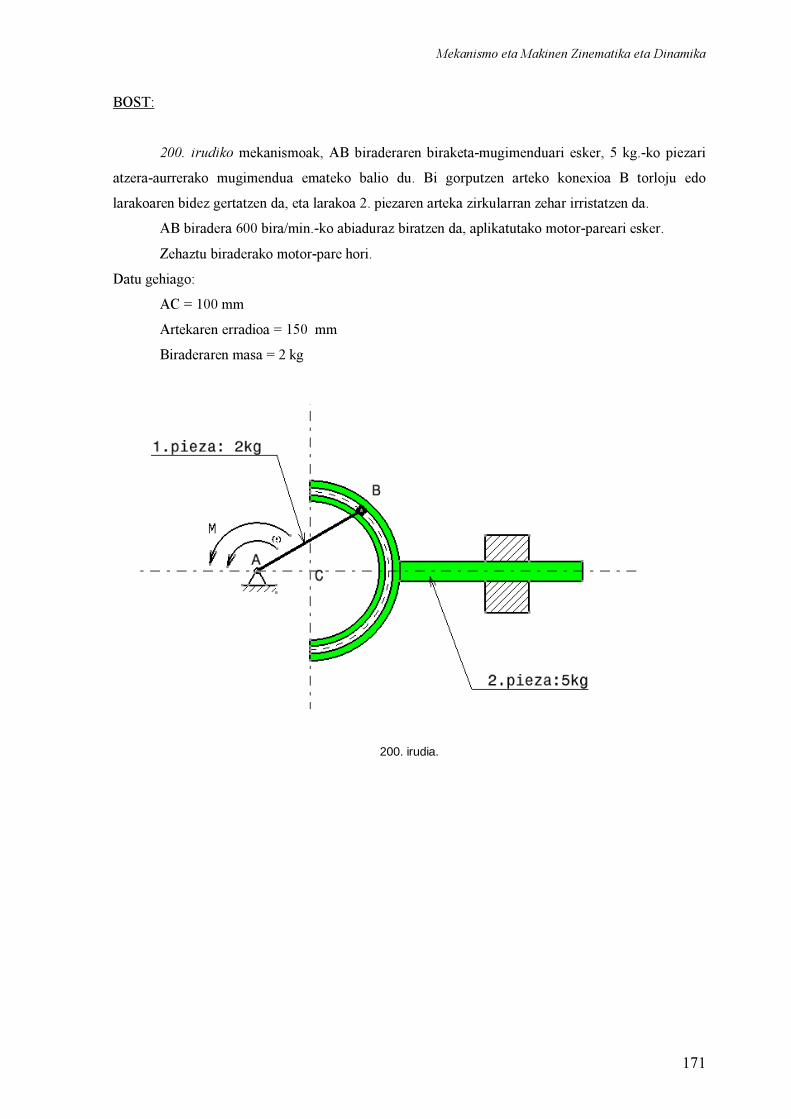
Mekanismo eta Makinen Zinematika eta Dinamika
171
BOST:
200. irudiko mekanismoak, AB biraderaren biraketa-mugimenduari esker, 5 kg.-ko piezari atzera-aurrerako mugimendua emateko balio du. Bi gorputzen arteko konexioa B torloju edo larakoaren bidez gertatzen da, eta larakoa 2. piezaren arteka zirkularran zehar irristatzen da. AB biradera 600 bira/min.-ko abiaduraz biratzen da, aplikatutako motor-pareari esker. Zehaztu biraderako motor-pare hori. Datu gehiago: AC = 100 mm Artekaren erradioa = 150 mm Biraderaren masa = 2 kg
200. irudia.
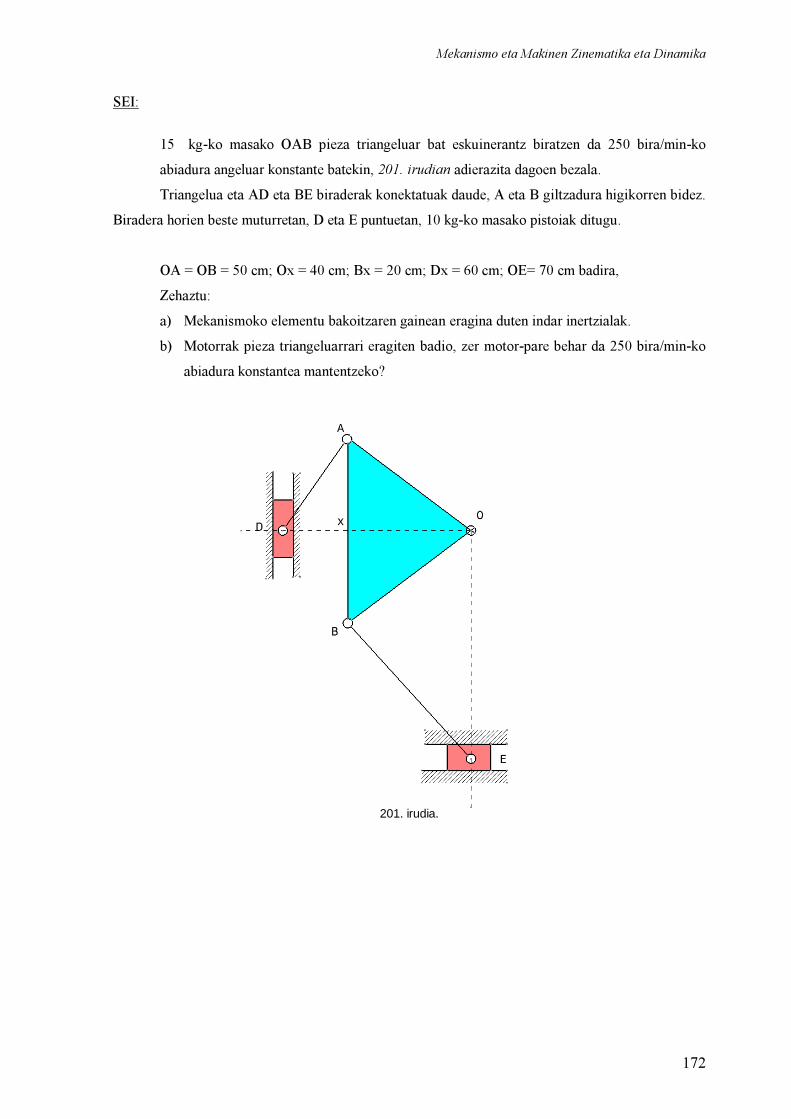
Mekanismo eta Makinen Zinematika eta Dinamika
172
SEI: 15 kg-ko masako OAB pieza triangeluar bat eskuinerantz biratzen da 250 bira/min-ko abiadura angeluar konstante batekin, 201. irudian adierazita dagoen bezala. Triangelua eta AD eta BE biraderak konektatuak daude, A eta B giltzadura higikorren bidez.
Biradera horien beste muturretan, D eta E puntuetan, 10 kg-ko masako pistoiak ditugu. OA = OB = 50 cm; Ox = 40 cm; Bx = 20 cm; Dx = 60 cm; OE= 70 cm badira, Zehaztu: a) Mekanismoko elementu bakoitzaren gainean eragina duten indar inertzialak. b) Motorrak pieza triangeluarrari eragiten badio, zer motor-pare behar da 250 bira/min-ko
abiadura konstantea mantentzeko?
201. irudia.
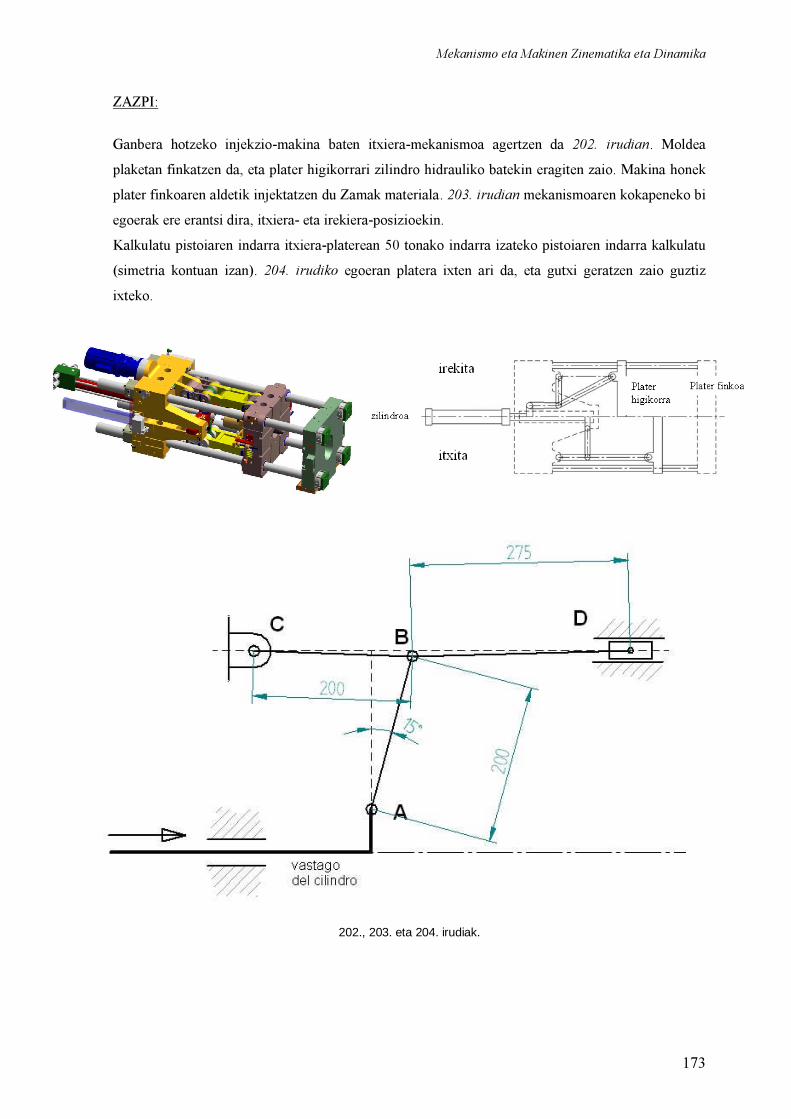
Mekanismo eta Makinen Zinematika eta Dinamika
173
ZAZPI: Ganbera hotzeko injekzio-makina baten itxiera-mekanismoa agertzen da 202. irudian. Moldea plaketan finkatzen da, eta plater higikorrari zilindro hidrauliko batekin eragiten zaio. Makina honek plater finkoaren aldetik injektatzen du Zamak materiala. 203. irudian mekanismoaren kokapeneko bi egoerak ere erantsi dira, itxiera- eta irekiera-posizioekin. Kalkulatu pistoiaren indarra itxiera-platerean 50 tonako indarra izateko pistoiaren indarra kalkulatu (simetria kontuan izan). 204. irudiko egoeran platera ixten ari da, eta gutxi geratzen zaio guztiz ixteko.
202., 203. eta 204. irudiak.
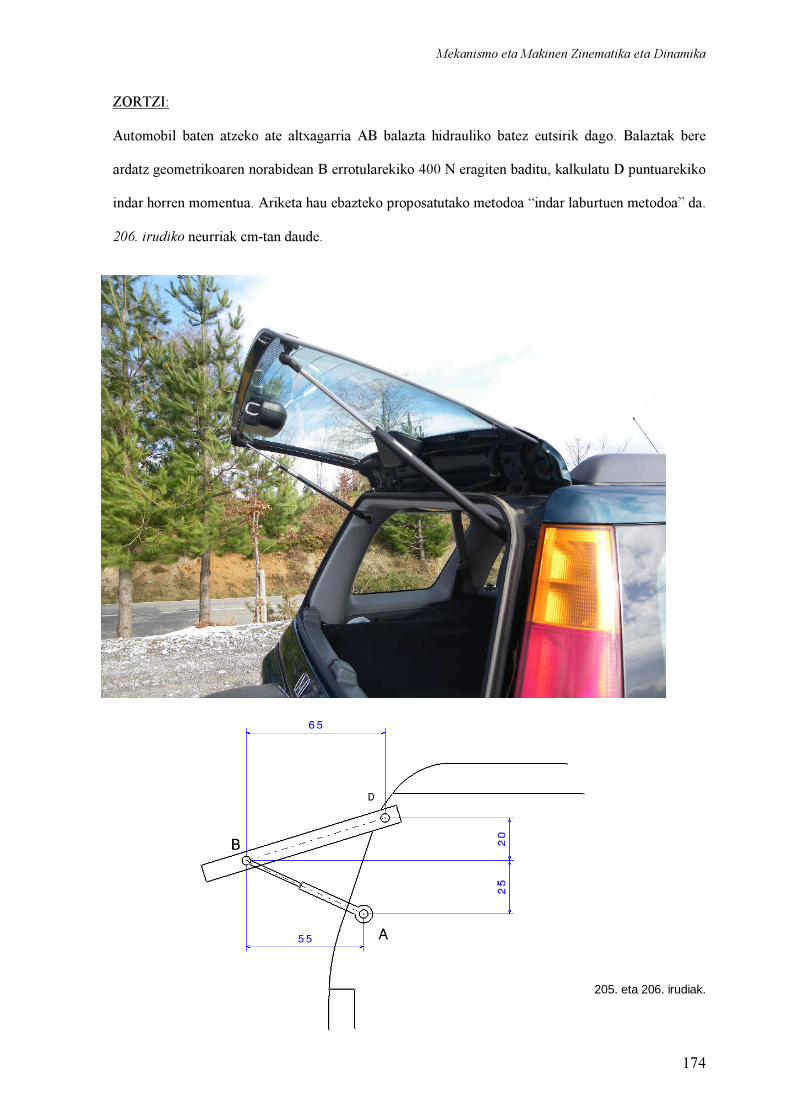
Mekanismo eta Makinen Zinematika eta Dinamika
174
ZORTZI: Automobil baten atzeko ate altxagarria AB balazta hidrauliko batez eutsirik dago. Balaztak bere ardatz geometrikoaren norabidean B errotularekiko 400 N eragiten baditu, kalkulatu D puntuarekiko indar horren momentua. Ariketa hau ebazteko proposatutako metodoa “indar laburtuen metodoa” da. 206. irudiko neurriak cm-tan daude.
205. eta 206. irudiak.

Mekanismo eta Makinen Zinematika eta Dinamika
175
Gurpilak orekatzeko makina
_OREKATZEA
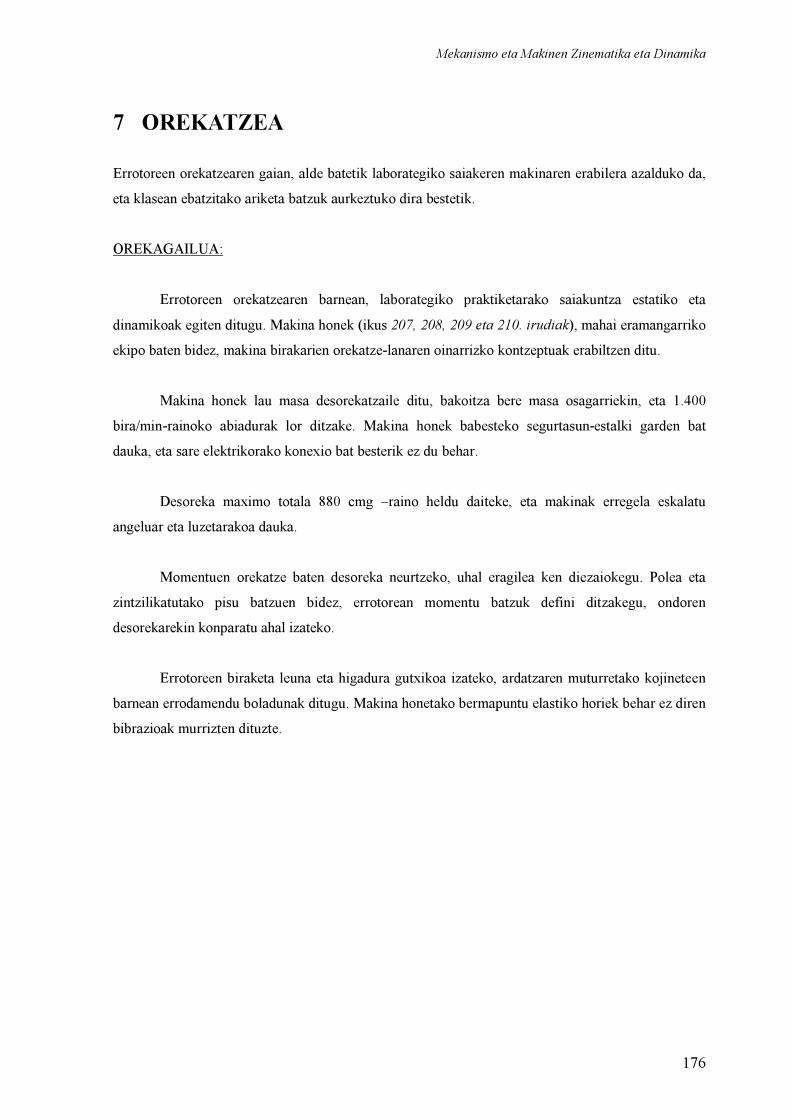
Mekanismo eta Makinen Zinematika eta Dinamika
176
7 OREKATZEA Errotoreen orekatzearen gaian, alde batetik laborategiko saiakeren makinaren erabilera azalduko da, eta klasean ebatzitako ariketa batzuk aurkeztuko dira bestetik. OREKAGAILUA:
Errotoreen orekatzearen barnean, laborategiko praktiketarako saiakuntza estatiko eta dinamikoak egiten ditugu. Makina honek (ikus 207, 208, 209 eta 210. irudiak), mahai eramangarriko ekipo baten bidez, makina birakarien orekatze-lanaren oinarrizko kontzeptuak erabiltzen ditu.
Makina honek lau masa desorekatzaile ditu, bakoitza bere masa osagarriekin, eta 1.400
bira/min-rainoko abiadurak lor ditzake. Makina honek babesteko segurtasun-estalki garden bat dauka, eta sare elektrikorako konexio bat besterik ez du behar.
Desoreka maximo totala 880 cmg –raino heldu daiteke, eta makinak erregela eskalatu
angeluar eta luzetarakoa dauka. Momentuen orekatze baten desoreka neurtzeko, uhal eragilea ken diezaiokegu. Polea eta
zintzilikatutako pisu batzuen bidez, errotorean momentu batzuk defini ditzakegu, ondoren desorekarekin konparatu ahal izateko.
Errotoreen biraketa leuna eta higadura gutxikoa izateko, ardatzaren muturretako kojineteen
barnean errodamendu boladunak ditugu. Makina honetako bermapuntu elastiko horiek behar ez diren bibrazioak murrizten dituzte.
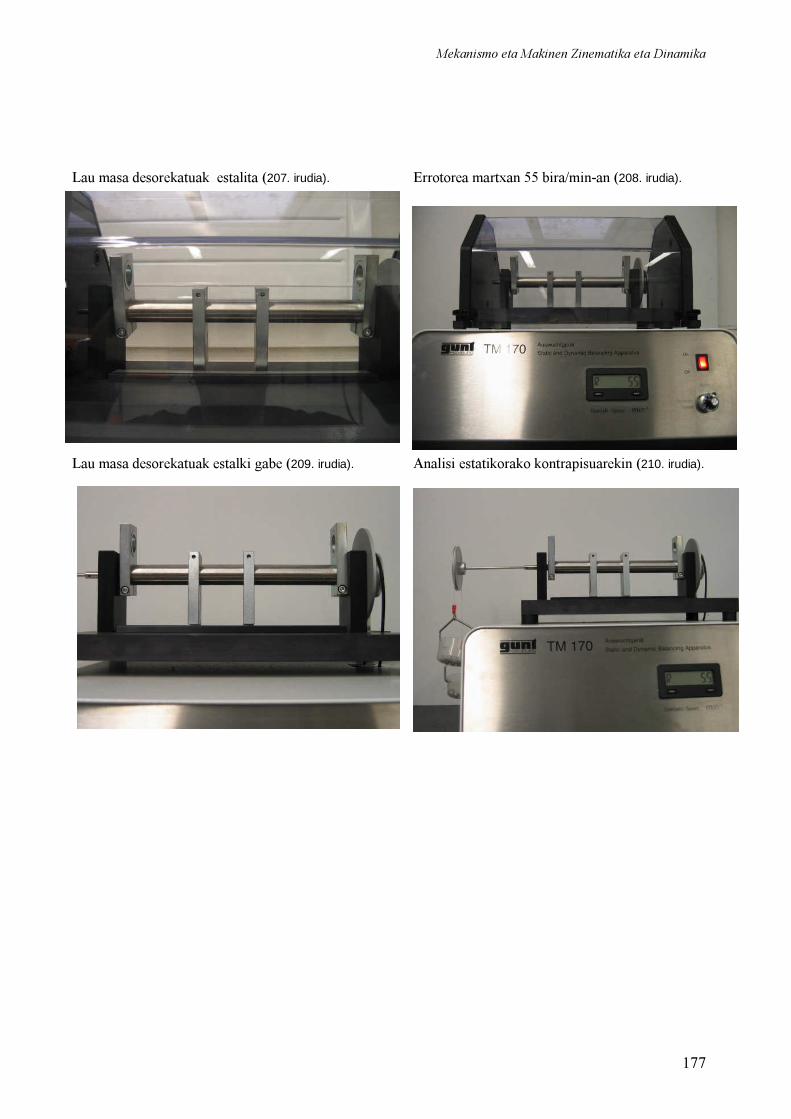
Mekanismo eta Makinen Zinematika eta Dinamika
177
Lau masa desorekatuak estalita (207. irudia). Errotorea martxan 55 bira/min-an (208. irudia).
Lau masa desorekatuak estalki gabe (209. irudia). Analisi estatikorako kontrapisuarekin (210. irudia).

Mekanismo eta Makinen Zinematika eta Dinamika
178
MAKINA OREKATZAILE BAT Gaur egun hain hedatua dagoen automobilen arloan, errotore-ardatzen orekatze-kasu adierazgarri bat autoetako gurpilen orekatzea da. Makina hau automobil-tailerretan, edo bereziki horretan aritzen diren tailerretan aurkitu dezakegu. 211. irudia. Gurpilak orekatzeko makina
212. irudia. Gurpila errotorean finkatua
214. irudia. Makinaren pantaila 213. irudia. Gurpila babestuta, saiakuntzarako prest
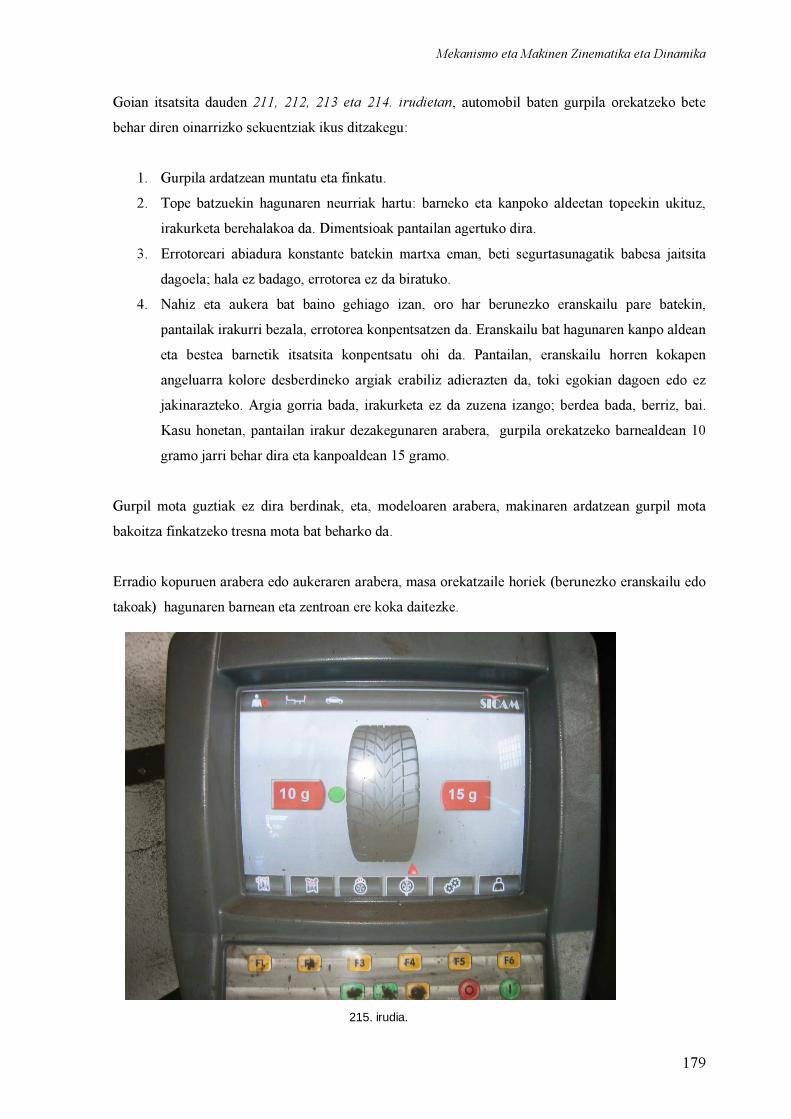
Mekanismo eta Makinen Zinematika eta Dinamika
179
Goian itsatsita dauden 211, 212, 213 eta 214. irudietan, automobil baten gurpila orekatzeko bete behar diren oinarrizko sekuentziak ikus ditzakegu:
1. Gurpila ardatzean muntatu eta finkatu. 2. Tope batzuekin hagunaren neurriak hartu: barneko eta kanpoko aldeetan topeekin ukituz,
irakurketa berehalakoa da. Dimentsioak pantailan agertuko dira. 3. Errotoreari abiadura konstante batekin martxa eman, beti segurtasunagatik babesa jaitsita
dagoela; hala ez badago, errotorea ez da biratuko. 4. Nahiz eta aukera bat baino gehiago izan, oro har berunezko eranskailu pare batekin,
pantailak irakurri bezala, errotorea konpentsatzen da. Eranskailu bat hagunaren kanpo aldean eta bestea barnetik itsatsita konpentsatu ohi da. Pantailan, eranskailu horren kokapen angeluarra kolore desberdineko argiak erabiliz adierazten da, toki egokian dagoen edo ez jakinarazteko. Argia gorria bada, irakurketa ez da zuzena izango; berdea bada, berriz, bai. Kasu honetan, pantailan irakur dezakegunaren arabera, gurpila orekatzeko barnealdean 10 gramo jarri behar dira eta kanpoaldean 15 gramo.
Gurpil mota guztiak ez dira berdinak, eta, modeloaren arabera, makinaren ardatzean gurpil mota bakoitza finkatzeko tresna mota bat beharko da. Erradio kopuruen arabera edo aukeraren arabera, masa orekatzaile horiek (berunezko eranskailu edo takoak) hagunaren barnean eta zentroan ere koka daitezke. 215. irudia.
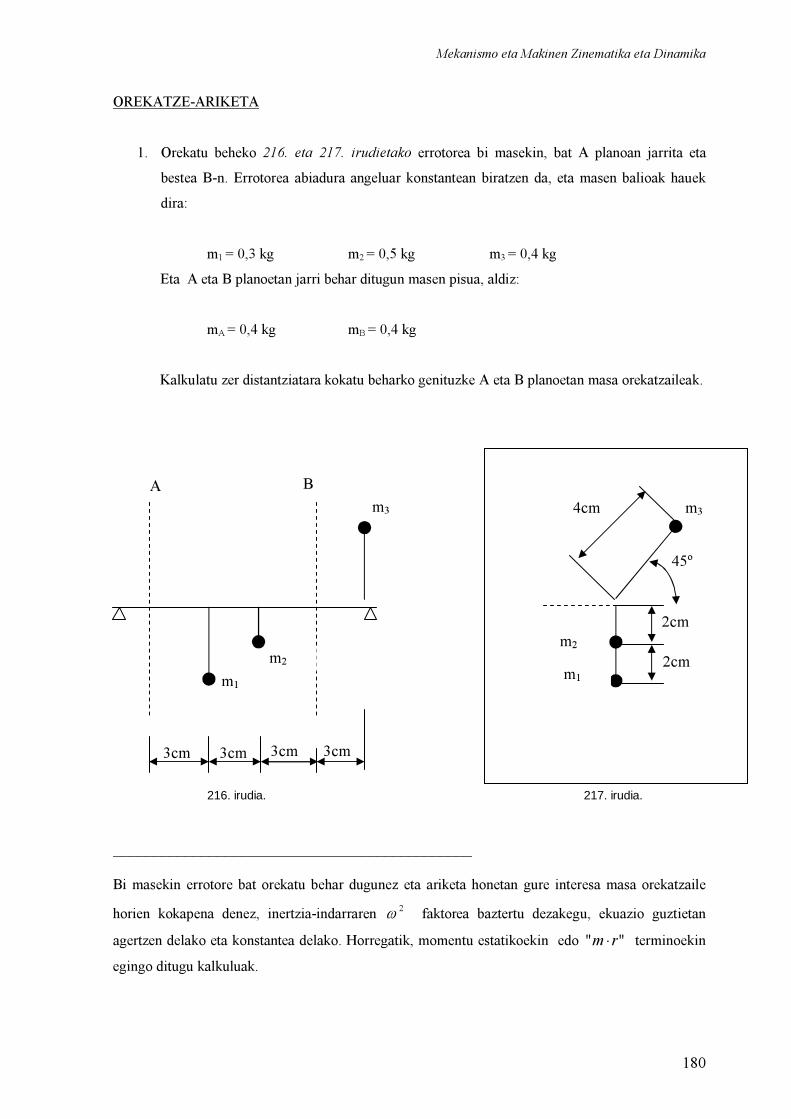
Mekanismo eta Makinen Zinematika eta Dinamika
180
OREKATZE-ARIKETA
1. Orekatu beheko 216. eta 217. irudietako errotorea bi masekin, bat A planoan jarrita eta bestea B-n. Errotorea abiadura angeluar konstantean biratzen da, eta masen balioak hauek dira:
m1 = 0,3 kg m2 = 0,5 kg m3 = 0,4 kg
Eta A eta B planoetan jarri behar ditugun masen pisua, aldiz: mA = 0,4 kg mB = 0,4 kg
Kalkulatu zer distantziatara kokatu beharko genituzke A eta B planoetan masa orekatzaileak.
216. irudia. 217. irudia. _____________________________________________ Bi masekin errotore bat orekatu behar dugunez eta ariketa honetan gure interesa masa orekatzaile horien kokapena denez, inertzia-indarraren 2ω faktorea baztertu dezakegu, ekuazio guztietan agertzen delako eta konstantea delako. Horregatik, momentu estatikoekin edo "" rm ⋅ terminoekin egingo ditugu kalkuluak.
3cm 3cm 3cm 3cm
m1
m2
m3
2cm
2cm m2
m3
m1
4cm A B
45º

Mekanismo eta Makinen Zinematika eta Dinamika
181
cmkgrmFcmkgrmFcmkgrmF
⋅=⋅=⋅=
⋅=⋅=⋅=
⋅=⋅=⋅=
6,144,00,125,02,143,0
333
222
111
Errotorea A eta B planoetan orekatu behar dugunez, momentu estatiko bakoitza plano horietan deskonposa dezakegu. Lehengo masaren kasuan:
cmkgFFFcmkgFF
AB
A
⋅=−=
⋅=+
⋅=
4,08,063
6
111
11
Bigarren masaren kasuan, momentu estatiko horien deskonposaketa A eta B planoetan:
cmkgFFFcmkgFF
AB
A
⋅=−=
⋅=+
⋅=
66,033,063
3
222
22
Hirugarren masan:
218. irudia.
cmkgFFFF
MM
B
BA
tearenaerresulmomentuApartzialakmomentuA
⋅=⋅=
⋅=⋅+⋅=∑
13,29126,1
1290
3
333
tan
Bestalde, momentu erresultantea beste momentu deskonposatu edo partzialen batura denez: cmkgFFFFFF BABA ⋅−=−=====>+= 53,0333333
219. irudia.

Mekanismo eta Makinen Zinematika eta Dinamika
182
AF3 bektorea negatiboa irteten denez, noranzkoa aldatu behar.
Orain, A planoan hiru masen momentu deskonposatuak bilduz: AAAA FFFF 321
vvvv
++= 220. irudia. Trigonometriarekin diseinuko softwarean kalkulatu ditugun neurriak baieztatzeko:
( ) ( ) ( ) ( ) cmkgRF AA ⋅=+=+++⋅== 55,15,137,0º45sin53,033,08,0º45cos53,0 2222 º7637,0
5,11 == arctgϕ
Bestalde, deskonposatutako momentu estatikoak B planoan bilduz: BBBB FFFF 321
vvvv
++=

Mekanismo eta Makinen Zinematika eta Dinamika
183
221. irudia. Neurriak trigonometrikoki egiaztatuz:
( ) ( ) ( ) ( ) cmkgRF BB ⋅=+=−−+⋅== 62,144,056,166,04,0º45sin13,2º45cos13,2 2222
º1544,056,1
2 == arctgϕ A eta B planoetan momentu estatiko erresultanteak konpentsatzeko jarri behar diren masa orekatzaileak:
BBB
AAA
rmRrmR⋅=
⋅=
Hemendik, masa orekatzaile horien errotorearen ardatzera distantzia zuzenak atera daitezke, datu guztiak definituz:
cmmRr
cmmRr
B
BB
A
AA
05,44,062,1
87,34,055,1
===
===
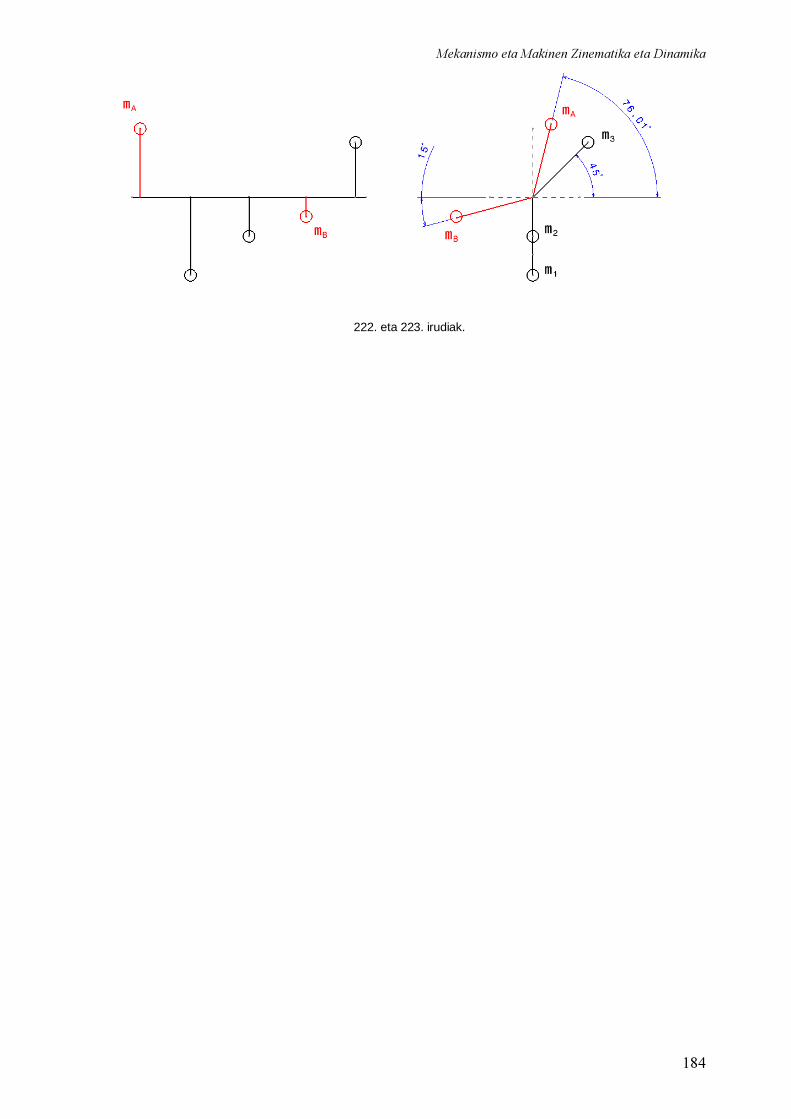
Mekanismo eta Makinen Zinematika eta Dinamika
184
222. eta 223. irudiak.
Mekanismo eta Makinen Zinematika eta Dinamika
185
_ENGRANAJEAK

Mekanismo eta Makinen Zinematika eta Dinamika
186
8 ENGRANAJEAK
1. Bi engranaje normalek 5 mm-ko modulua dute. Gurpilak 75 hortz ditu, eta pinoiak 30. Bi engranaje horiek zentroen artean duten distantzia % 2ko gehienezko akatsa jasaten badute, kalkulatu:
a. Jatorrizko zirkunferentzien erradio maximoak. b. Hortzen arteko lasaiera maximoa funtzionamenduko jatorrizko zirkunferentzietan
neurtuta. c. Presio-angelu maximoa. d. Kondukzio-angelua baldintza txarrenean eta hoberenean. e. Kontaktu-erlazioa bi kasuetan.
EBAZPENA: Engranaje-zentroen arteko distantzia haien jatorrizko erradioen batura izango da:
224. irudia.
mmRRdtziadisartekozentroenBeraz
mmzmRmmzmR
RRd
5,2625,18775:tan5,1872752
3052
21
22
11
21
=+=+=
=⋅
==⋅
=⋅
=
+=
Orain, gehienez % 2ko akatsa izan badezake:
mmd 25,55,2622% =⋅=∆ Beraz, zentroen arteko distantzia maximoa: 262,5+5,25=267,75 mm Eta, ondorioz, jatorrizko zirkunferentzien erradio maximoak:
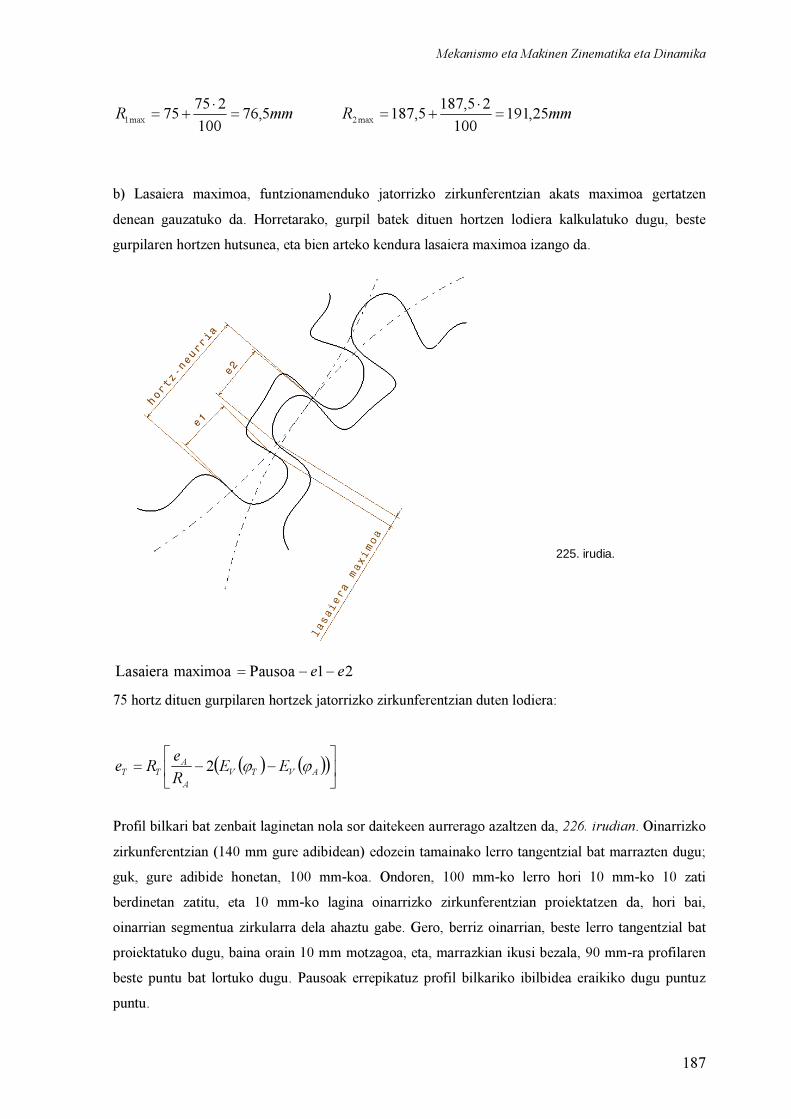
Mekanismo eta Makinen Zinematika eta Dinamika
187
mmRmmR 25,19110025,1875,1875,76100
27575 max2max1 =⋅
+==⋅
+= b) Lasaiera maximoa, funtzionamenduko jatorrizko zirkunferentzian akats maximoa gertatzen denean gauzatuko da. Horretarako, gurpil batek dituen hortzen lodiera kalkulatuko dugu, beste gurpilaren hortzen hutsunea, eta bien arteko kendura lasaiera maximoa izango da. 225. irudia.
21PausoamaximoaLasaiera ee −−= 75 hortz dituen gurpilaren hortzek jatorrizko zirkunferentzian duten lodiera:
( ) ( )( )
−−= AVTVA
ATT EE
ReRe ϕϕ2
Profil bilkari bat zenbait laginetan nola sor daitekeen aurrerago azaltzen da, 226. irudian. Oinarrizko zirkunferentzian (140 mm gure adibidean) edozein tamainako lerro tangentzial bat marrazten dugu; guk, gure adibide honetan, 100 mm-koa. Ondoren, 100 mm-ko lerro hori 10 mm-ko 10 zati berdinetan zatitu, eta 10 mm-ko lagina oinarrizko zirkunferentzian proiektatzen da, hori bai, oinarrian segmentua zirkularra dela ahaztu gabe. Gero, berriz oinarrian, beste lerro tangentzial bat proiektatuko dugu, baina orain 10 mm motzagoa, eta, marrazkian ikusi bezala, 90 mm-ra profilaren beste puntu bat lortuko dugu. Pausoak errepikatuz profil bilkariko ibilbidea eraikiko dugu puntuz puntu.
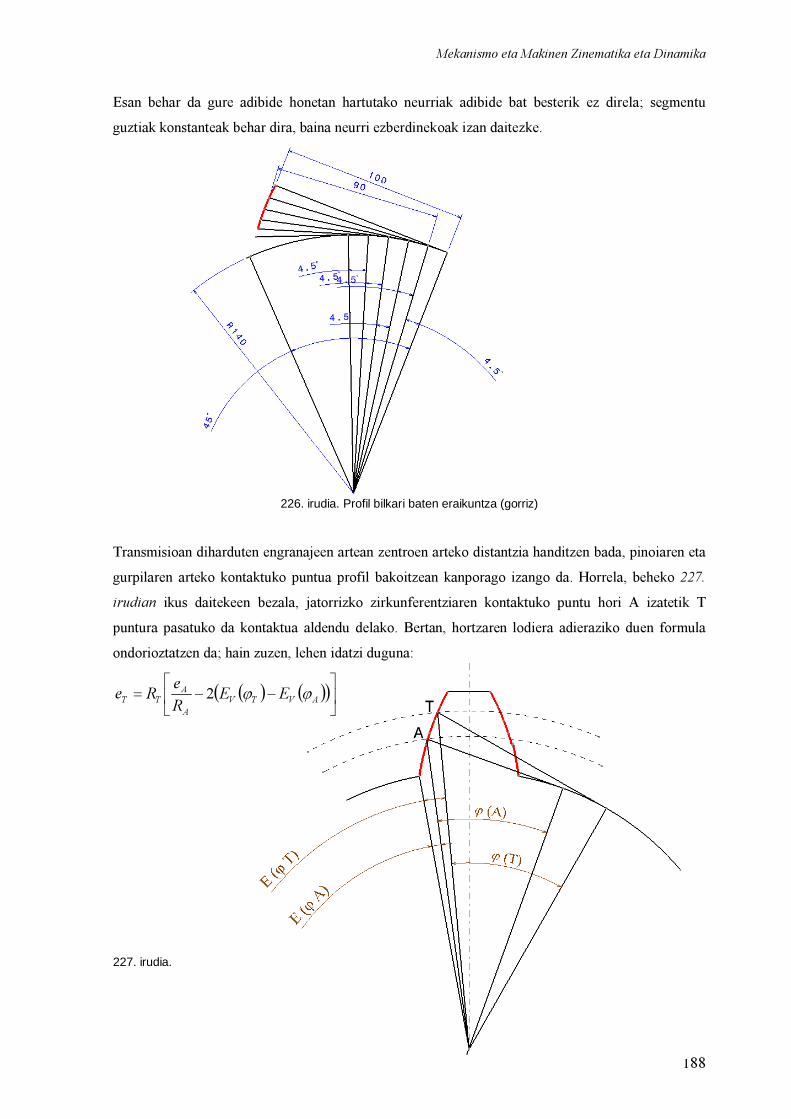
Mekanismo eta Makinen Zinematika eta Dinamika
188
Esan behar da gure adibide honetan hartutako neurriak adibide bat besterik ez direla; segmentu guztiak konstanteak behar dira, baina neurri ezberdinekoak izan daitezke.
226. irudia. Profil bilkari baten eraikuntza (gorriz)
Transmisioan diharduten engranajeen artean zentroen arteko distantzia handitzen bada, pinoiaren eta gurpilaren arteko kontaktuko puntua profil bakoitzean kanporago izango da. Horrela, beheko 227. irudian ikus daitekeen bezala, jatorrizko zirkunferentziaren kontaktuko puntu hori A izatetik T puntura pasatuko da kontaktua aldendu delako. Bertan, hortzaren lodiera adieraziko duen formula ondorioztatzen da; hain zuzen, lehen idatzi duguna:
( ) ( )( )
−−= AVTVA
ATT EE
ReRe ϕϕ2
227. irudia.
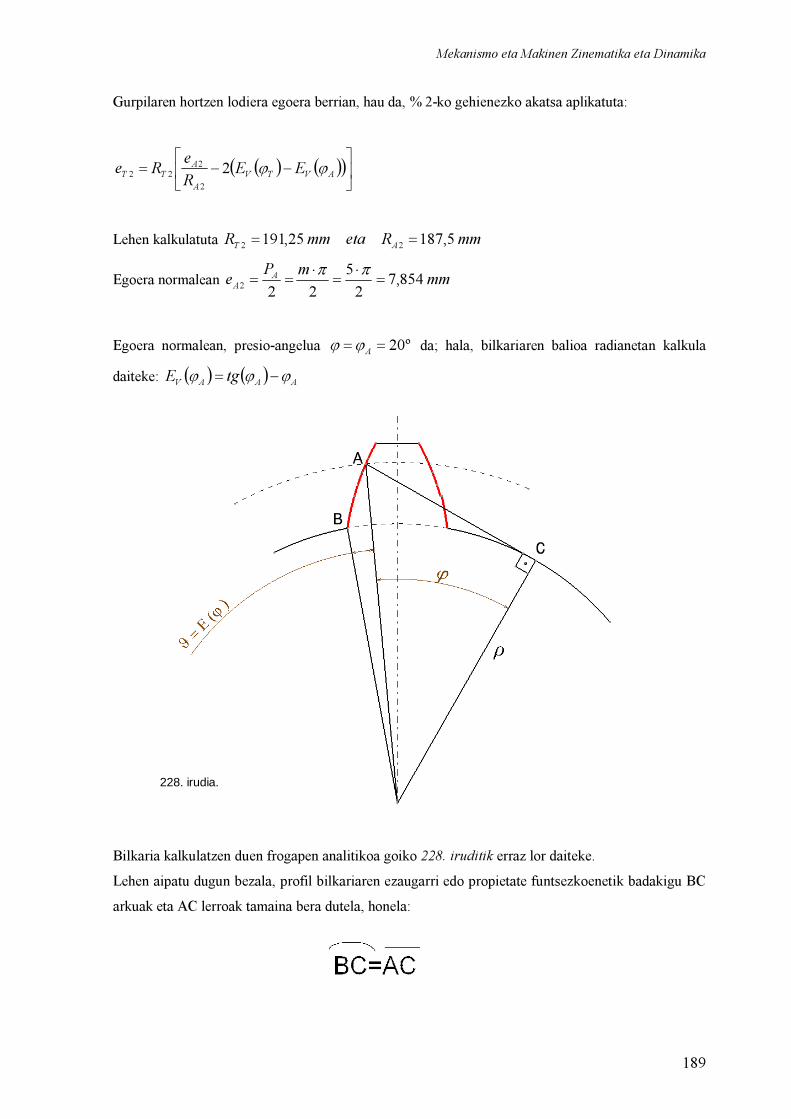
Mekanismo eta Makinen Zinematika eta Dinamika
189
Gurpilaren hortzen lodiera egoera berrian, hau da, % 2-ko gehienezko akatsa aplikatuta:
( ) ( )( )
−−= AVTVA
ATT EE
ReRe ϕϕ22
222
Lehen kalkulatuta mmRetammR AT 5,18725,191 22 == Egoera normalean mmmPe A
A 854,725
222 =⋅
=⋅
==ππ
Egoera normalean, presio-angelua º20== Aϕϕ da; hala, bilkariaren balioa radianetan kalkula daiteke: ( ) ( ) AAAV tgE ϕϕϕ −=
228. irudia. Bilkaria kalkulatzen duen frogapen analitikoa goiko 228. iruditik erraz lor daiteke. Lehen aipatu dugun bezala, profil bilkariaren ezaugarri edo propietate funtsezkoenetik badakigu BC arkuak eta AC lerroak tamaina bera dutela, honela:
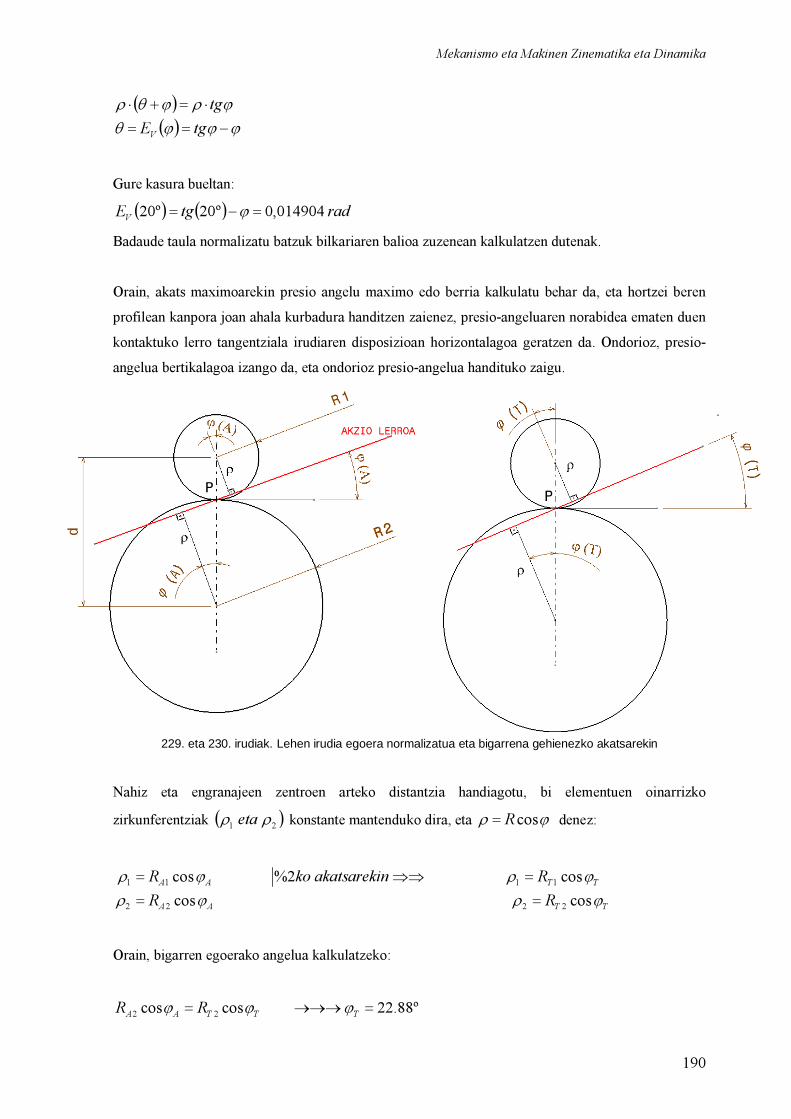
Mekanismo eta Makinen Zinematika eta Dinamika
190
( )( ) ϕϕϕθ
ϕρϕθρ−==
⋅=+⋅
tgEtg
V
Gure kasura bueltan:
( ) ( ) radtgEV 014904,0º20º20 =−= ϕ Badaude taula normalizatu batzuk bilkariaren balioa zuzenean kalkulatzen dutenak. Orain, akats maximoarekin presio angelu maximo edo berria kalkulatu behar da, eta hortzei beren profilean kanpora joan ahala kurbadura handitzen zaienez, presio-angeluaren norabidea ematen duen kontaktuko lerro tangentziala irudiaren disposizioan horizontalagoa geratzen da. Ondorioz, presio-angelua bertikalagoa izango da, eta ondorioz presio-angelua handituko zaigu.
229. eta 230. irudiak. Lehen irudia egoera normalizatua eta bigarrena gehienezko akatsarekin Nahiz eta engranajeen zentroen arteko distantzia handiagotu, bi elementuen oinarrizko zirkunferentziak ( )21 ρρ eta konstante mantenduko dira, eta ϕρ cosR= denez:
TTAA
TTAA
RRRnakatsarekikoR
ϕρϕρϕρϕρ
coscoscos2%cos2222
1111
==
=⇒⇒=
Orain, bigarren egoerako angelua kalkulatzeko:
º88.22coscos 22 =→→→= TTTAA RR ϕϕϕ

Mekanismo eta Makinen Zinematika eta Dinamika
191
Beraz: ( ) ( ) radtgEV 022736,0º180
º88,2288,22º88,22 =⋅
−=π
Hortzen lodierak kalkulatzeko datu guztiak ditugunez, orain gurpilaren hortz-lodiera (T) jatorrizko zirkunferentzian:
( ) ( )( ) ( ) mmEEReRe AVTV
A
ATT 01,5014904,0022736,025,187
854,725,19122
222 =
−−=
−−= ϕϕ
eta hortz lodiera pinoiaren jatorrizko zirkunferentzian:
( ) ( )( ) ( ) mm81,6014904,0022736,0275854,75,762
1
111 =
−−=
−−= AVTV
A
ATT EE
ReRe ϕϕ
mm2,481,601,52neurriaHortzmaximoalasaieraBeraz,
1
112 =−−
⋅=−−−=
zRee T
TTπ
c) Presio-angelu maximoaren balioa aurreko ataleko une batean kalkulatu dugu:
º88,22=Tϕ
d) eta e) Atal hauetan kondukzio-angelua eta kontaktu-erlazioa kalkulatuko dira baldintza txarrenean eta hoberenean, edo egoera normalean eta gehienezko akatsarekin. Lehenik eta behin, irudi baten bitartez engranaje pare baten mugimendua adieraztea komeni da. Eta badakigunez irudi bat estatikoa dela, mugimendu baten bi egoera adieraziko ditugu. Hau da, 231. irudian pinoi eta gurpil baten errotazioa ikus dezakegu, non pinoia eskuinerantz biratzen den eta gurpila ezkerrerantz. Mugimenduaren transmisioan kontaktuan dauden bi hortzen profil bilkarien hasierako eta amaierako ukipena adierazi nahi dira, bira baten zikloaren barruan. Zehazteko, engranaje bakoitzaren bi profil pareren lehen ukipen-puntua A puntua izango da, eta azkena, bira horretan, B puntua; bitartean, profilen arteko kontaktu bat izango da esfortzu eta indarrak transmitituko dituena. Profilen arteko kontaktu hori labainketa gabeko errodadura bat izango da.
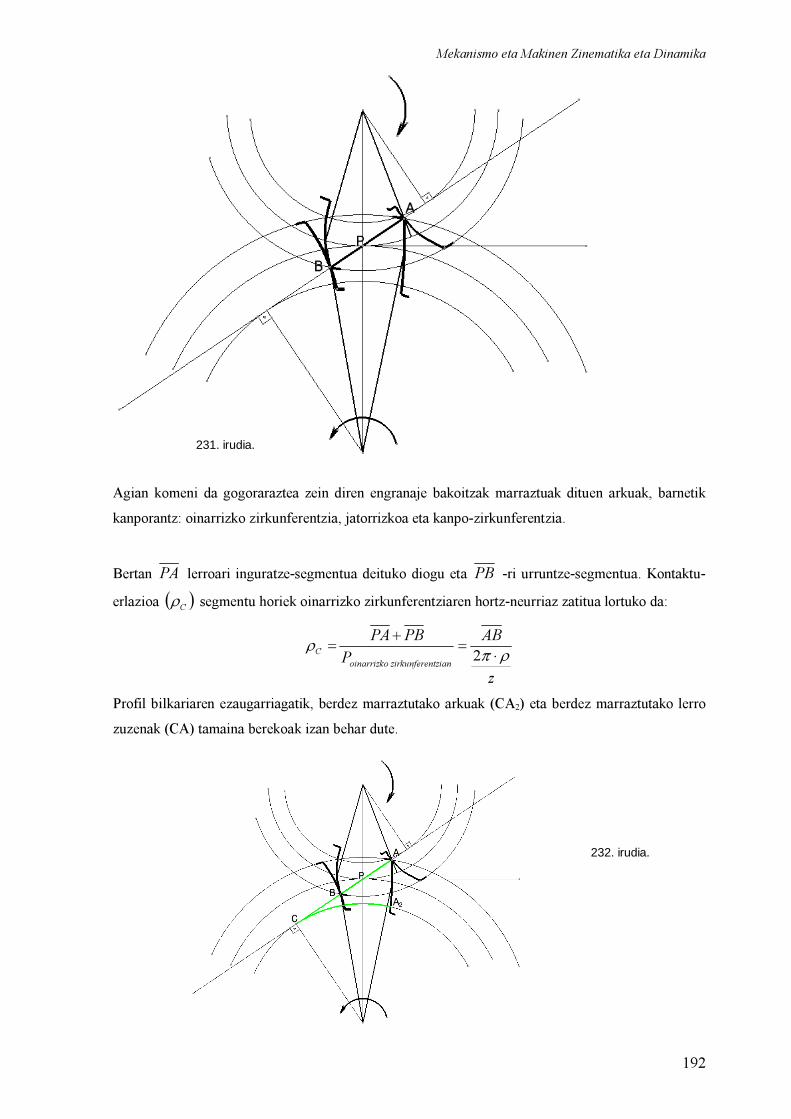
Mekanismo eta Makinen Zinematika eta Dinamika
192
231. irudia. Agian komeni da gogoraraztea zein diren engranaje bakoitzak marraztuak dituen arkuak, barnetik kanporantz: oinarrizko zirkunferentzia, jatorrizkoa eta kanpo-zirkunferentzia. Bertan PA lerroari inguratze-segmentua deituko diogu eta PB -ri urruntze-segmentua. Kontaktu-erlazioa ( )Cρ segmentu horiek oinarrizko zirkunferentziaren hortz-neurriaz zatitua lortuko da:
z
ABP
PBPAntzianzirkunfereoinarrizko
C ρπρ⋅
=+
= 2
Profil bilkariaren ezaugarriagatik, berdez marraztutako arkuak (CA2) eta berdez marraztutako lerro zuzenak (CA) tamaina berekoak izan behar dute. 232. irudia.
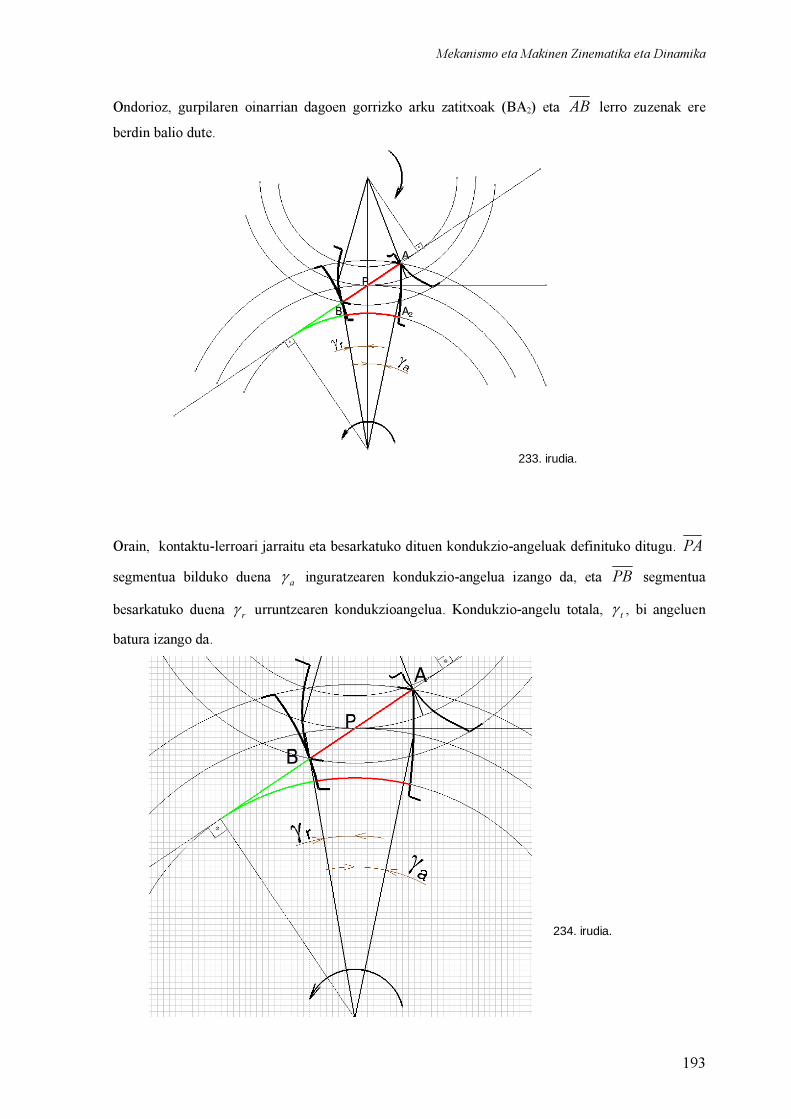
Mekanismo eta Makinen Zinematika eta Dinamika
193
Ondorioz, gurpilaren oinarrian dagoen gorrizko arku zatitxoak (BA2) eta AB lerro zuzenak ere berdin balio dute. 233. irudia. Orain, kontaktu-lerroari jarraitu eta besarkatuko dituen kondukzio-angeluak definituko ditugu. PA segmentua bilduko duena aγ inguratzearen kondukzio-angelua izango da, eta PB segmentua besarkatuko duena rγ urruntzearen kondukzioangelua. Kondukzio-angelu totala, tγ , bi angeluen batura izango da. 234. irudia.
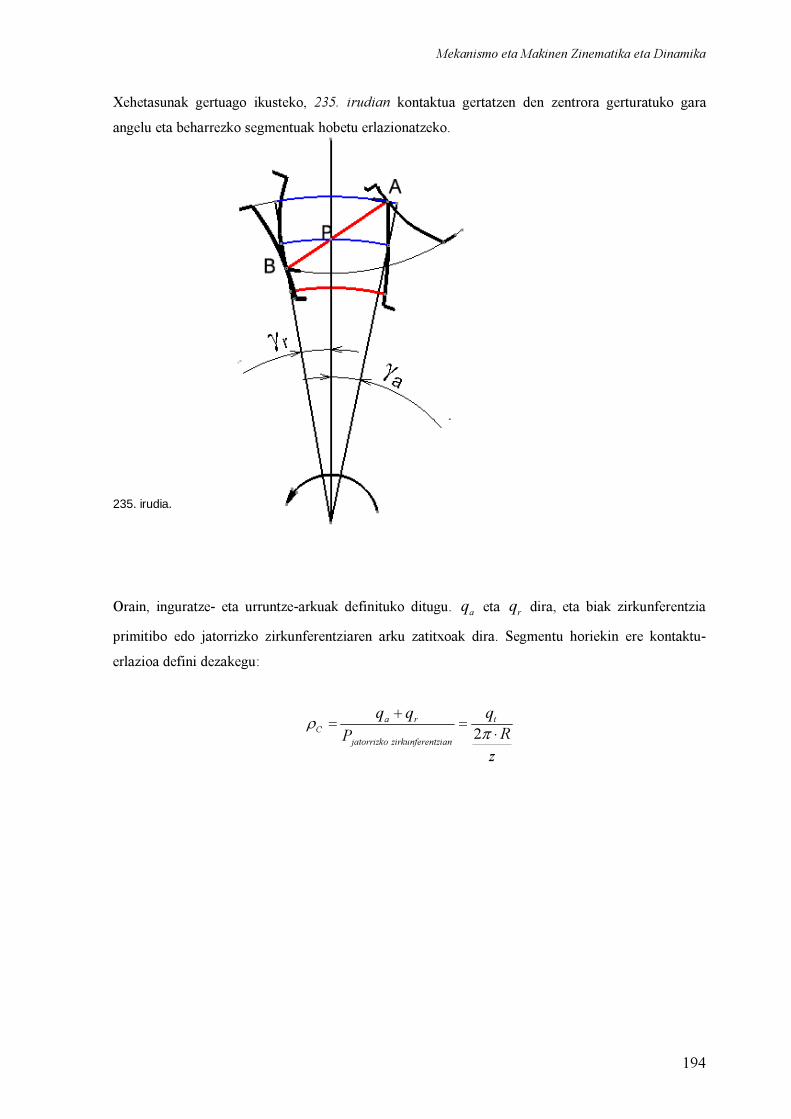
Mekanismo eta Makinen Zinematika eta Dinamika
194
Xehetasunak gertuago ikusteko, 235. irudian kontaktua gertatzen den zentrora gerturatuko gara angelu eta beharrezko segmentuak hobetu erlazionatzeko. 235. irudia. Orain, inguratze- eta urruntze-arkuak definituko ditugu. aq eta rq dira, eta biak zirkunferentzia primitibo edo jatorrizko zirkunferentziaren arku zatitxoak dira. Segmentu horiekin ere kontaktu-erlazioa defini dezakegu:
zR
qP
qq t
ntzianzirkunferejatorrizko
raC ⋅
=+
= πρ 2
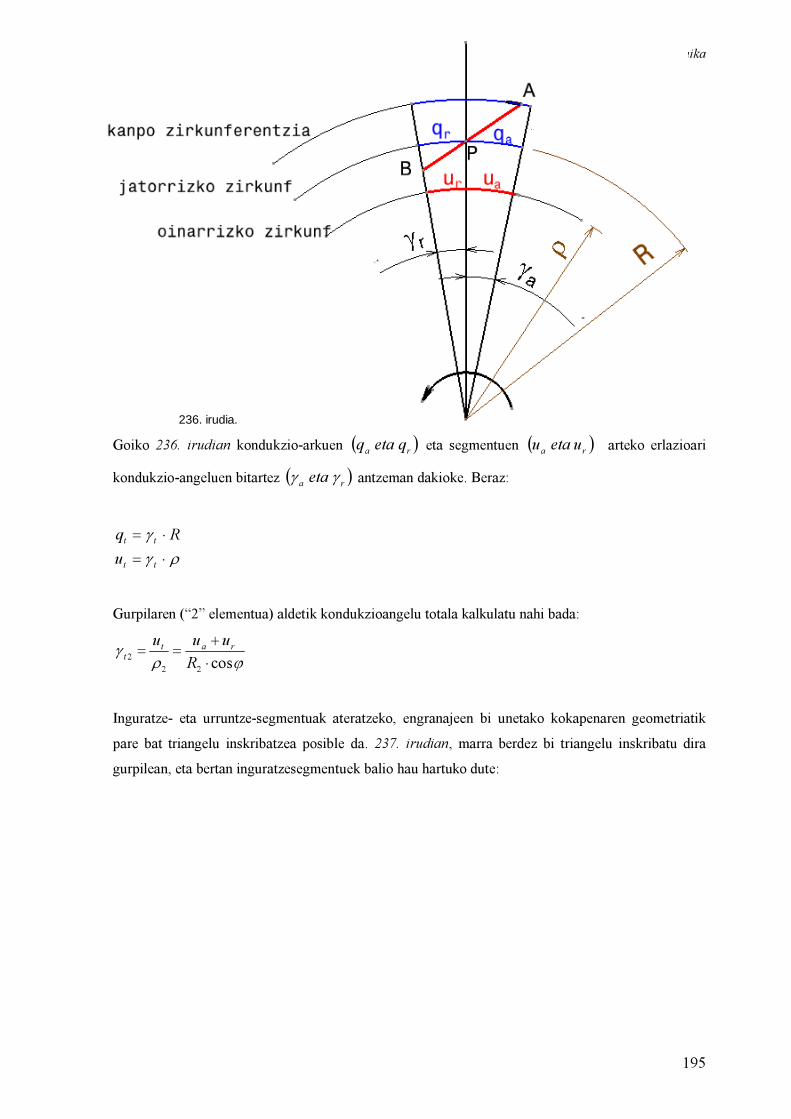
Mekanismo eta Makinen Zinematika eta Dinamika
195
236. irudia. Goiko 236. irudian kondukzio-arkuen ( )ra qetaq eta segmentuen ( )ra uetau arteko erlazioari kondukzio-angeluen bitartez ( )ra eta γγ antzeman dakioke. Beraz:
ργγ
⋅=
⋅=
tt
tt
uRq
Gurpilaren (“2” elementua) aldetik kondukzioangelu totala kalkulatu nahi bada:
ϕργ
cos222 ⋅
+==R
uuu ratt
Inguratze- eta urruntze-segmentuak ateratzeko, engranajeen bi unetako kokapenaren geometriatik pare bat triangelu inskribatzea posible da. 237. irudian, marra berdez bi triangelu inskribatu dira gurpilean, eta bertan inguratzesegmentuek balio hau hartuko dute:
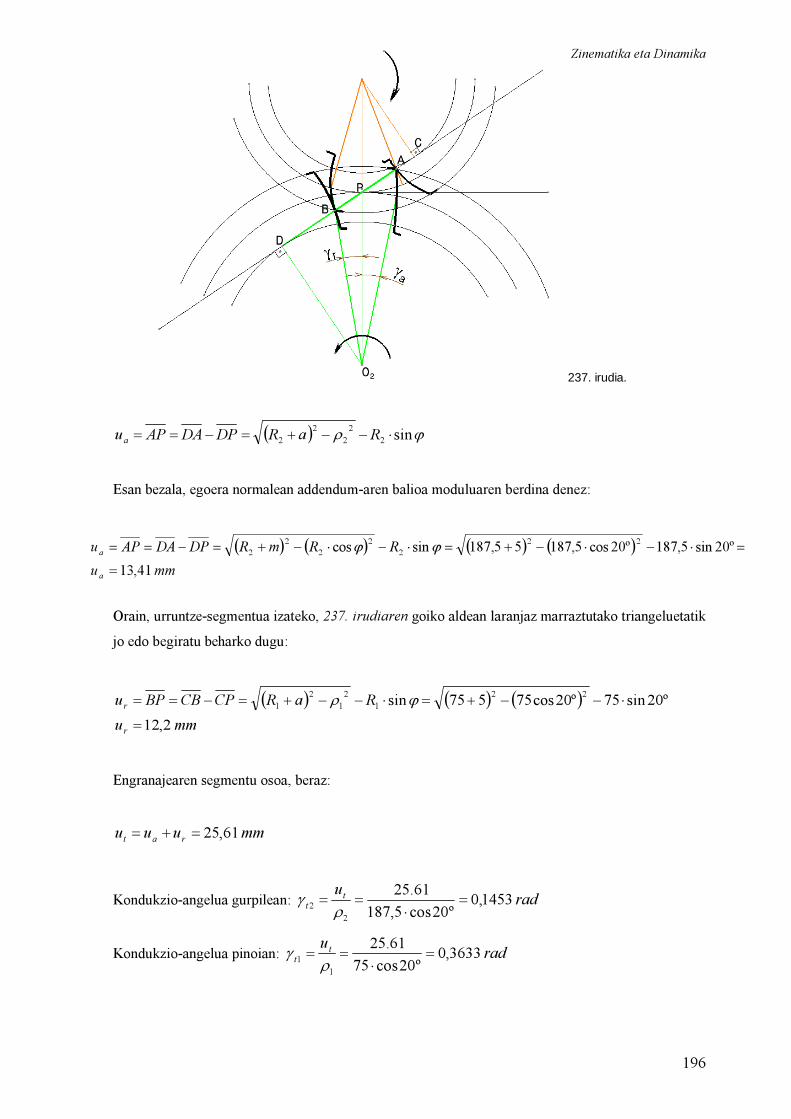
Mekanismo eta Makinen Zinematika eta Dinamika
196
237. irudia.
( ) ϕρ sin222
22 ⋅−−+=−== RaRDPDAAPua
Esan bezala, egoera normalean addendum-aren balioa moduluaren berdina denez:
( ) ( ) ( ) ( )mmu
RRmRDPDAAPu
a
a
41,13º20sin5,187º20cos5,18755,187sincos 22
22
22
2
=
=⋅−⋅−+=⋅−⋅−+=−== ϕϕ
Orain, urruntze-segmentua izateko, 237. irudiaren goiko aldean laranjaz marraztutako triangeluetatik jo edo begiratu beharko dugu:
( ) ( ) ( )mmu
RaRCPCBBPu
r
r
2,12º20sin75º20cos75575sin 22
121
21
=
⋅−−+=⋅−−+=−== ϕρ
Engranajearen segmentu osoa, beraz:
mmuuu rat 61,25=+= Kondukzio-angelua gurpilean: radut
t 1453,0º20cos5,18761.25
22 =
⋅==
ργ
Kondukzio-angelua pinoian: radutt 3633,0º20cos75
61.251
1 =⋅
==ρ
γ
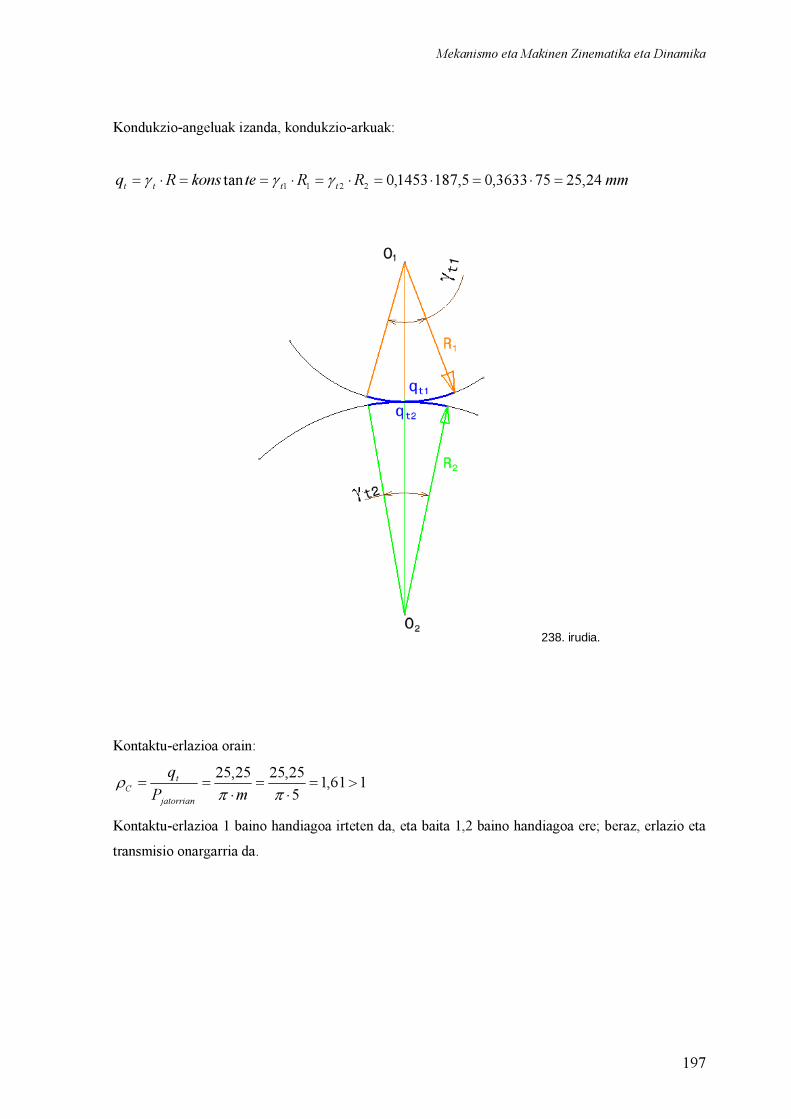
Mekanismo eta Makinen Zinematika eta Dinamika
197
Kondukzio-angeluak izanda, kondukzio-arkuak:
mmRRtekonsRq tttt 24,25753633,05,1871453,0tan 2211 =⋅=⋅=⋅=⋅==⋅= γγγ 238. irudia. Kontaktu-erlazioa orain:
161,1525,2525,25
>=⋅
=⋅
==ππ
ρ mPq
jatorrian
tC
Kontaktu-erlazioa 1 baino handiagoa irteten da, eta baita 1,2 baino handiagoa ere; beraz, erlazio eta transmisio onargarria da.

Mekanismo eta Makinen Zinematika eta Dinamika
198
Gehienezko akatsarekin transmisioan, inguratze- eta urruntze-segmentuak aldatuko dira zentroen arteko distantziak aldatzen direlako. Orain, kasu berri honetan, segmentuen distantzia:
''' rat uuu += Barne- eta kanpo-erradioak aldatzen ez direnez, ekuazio honetan erroaren barneko parametroen balio erresultanteak ez dira aldatuko:
( ) ( ) ( ) ( )mmu
RRmRua
TTa
182,3'º88,22sin25,191º20cos5,18755,187sincos' 22
22
22
2
=
=⋅−⋅−+=⋅−⋅−+= ϕϕ
( ) ( ) ( )
mmuRaRu
r
TTr
11.8º88,22sin5,76º20cos75575sin 22
121
21
=
⋅−−+=⋅−−+= ϕρ
mmuuu rat 3,11''' =+=
Akatsarekin, kondukzio-angelu eta -arkuak:
radu tt 064,0º20cos5,187
3,11''2
2 =⋅
==ρ
γ
radu tt 16,0º20cos75
3,11''1
1 =⋅
==ρ
γ
mmRRtekonsRq TtTttt 24,125,76016,025,191064,0''tan' 2211 =⋅=⋅=⋅=⋅==⋅= γγγ Akatsarekin, kontaktu-erlazioa:
176,030
5,76224,12
224,12
'''
1
1<=
⋅=
⋅== ππρ
zRP
qTjatorrian
tC
Zentroen arteko % 2ko alderapena ez da onargarria izango, engranaje pareen arteko profil bilkarietan kontaktu gabeko uneak izango direlako.

Mekanismo eta Makinen Zinematika eta Dinamika
199
ENGRANAJEEN 2. ARIKETA: 109 mm-ra dauden bi ardatzen artean bi engranaje zilindriko zuzen muntatu behar dira. Transmisio-erlazioa 8/7−=µ baldin bada, eta transmititu beharreko esfortzuek 7 mm-ko modulua eskatzen badute, definitu baldintza horiek beteko dituzten gurpilak, tailatzeko erabiliko den kremailerak 20º-ko presio-angelua baldin badu. EBAZPENA: 239. irudia. Gurpilen erradioen balioa transmisio-erlaziotik ateratzeko, kalkulua, bere balio osoarekin, moduluaren funtzio gisa utziko dugu:
2
1
2
1
1
2
87
zz
RR====
ωωµ
239. irudian ikus dezakegun bezala zentroen arteko distantzia 109 mm denez, balio hori jatorrizko erradioen baturarekin aterako dugu. Erradio horiek modulu eta hortz kopuruen funtzio gisa utzita:
( ) ( ) mmzzzzmzmzmRRd 10927
222 212121
21 =+=+⋅=⋅
+⋅
=+= Planteatutako distantzia eta moduluarekin, hortzen baturak hau emango luke:
( ) 15,3121 =+ zz Orain, transmisio-erlazioan hortz kopuruen sorta progresibo bat jarrita:

Mekanismo eta Makinen Zinematika eta Dinamika
200
...60453015
...3224168
...2821147
21
2
1
zz
z
z
+
Modulu eta zentroen arteko distantziak 31,15 hortz eman dizkigu, baina hori ezinezkoa da, hortz kopuru osoak behar ditugulako, logikoki dezimalik gabe. Orain, transmisio-erlazioak lortu ditugun segidan gehien inguratzen den posibilitatea hartuko dugu, hau da:
1614 21 == zz Hortz horiek egoera normalean kremailerarekin tailatzen baditugu, barneratze-interferentziak izango ditugu; beraz, kasu honetan engranajeak zuzendu beharko dira:
1,17º20sin2
1 limitea2limitea
limitea≥
=
=−≥ z
z
z
zx
ϕϕ
Beraz, elementu bakoitzaren zuzenketak:
064,0;1,171611
181,0;1,171411
2limitea
22
1limitea
11
≥−=−≥
≥−=−≥
xz
zx
xz
zx
Hauek dira egin beharreko zuzenketak, eta kremailera desplazatu behar dena mx ⋅ kasu bakoitzean. Bestalde:
mmRRdmmzmR
mmzmR105
562
492
212
2
11 =+=
=⋅=
=⋅=
Funtzionamenduan behar dugun distantzia 109 mm eta transmisio-erlazioa 7/8 denez:
mmRetammRRR
mmRRVV
V
V
VV
31,5868,5087109
21
2
1
21)) =
===+
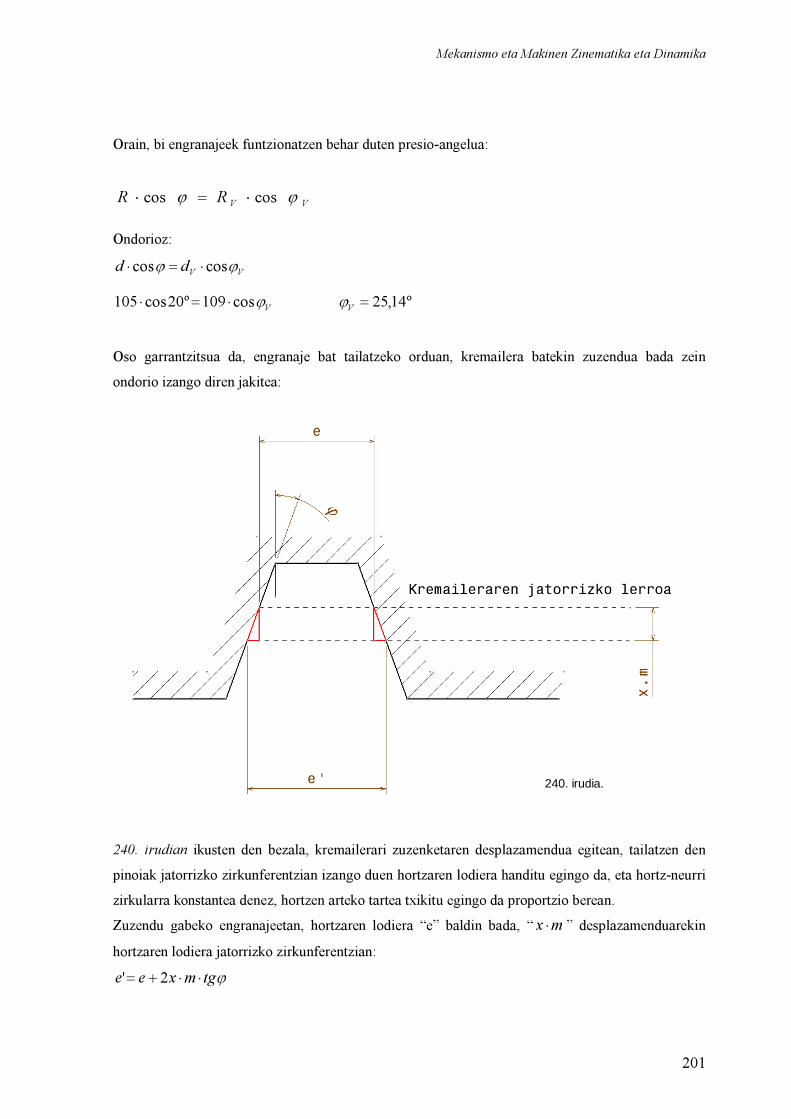
Mekanismo eta Makinen Zinematika eta Dinamika
201
Orain, bi engranajeek funtzionatzen behar duten presio-angelua:
VVRR ϕϕ coscos ⋅=⋅ Ondorioz:
º14,25cos109º20cos105
coscos
=⋅=⋅
⋅=⋅
VV
VVdd
ϕϕ
ϕϕ
Oso garrantzitsua da, engranaje bat tailatzeko orduan, kremailera batekin zuzendua bada zein ondorio izango diren jakitea: 240. irudia. 240. irudian ikusten den bezala, kremailerari zuzenketaren desplazamendua egitean, tailatzen den pinoiak jatorrizko zirkunferentzian izango duen hortzaren lodiera handitu egingo da, eta hortz-neurri zirkularra konstantea denez, hortzen arteko tartea txikitu egingo da proportzio berean. Zuzendu gabeko engranajeetan, hortzaren lodiera “e” baldin bada, “ mx ⋅ ” desplazamenduarekin hortzaren lodiera jatorrizko zirkunferentzian:
ϕtgmxee ⋅⋅+= 2'

Mekanismo eta Makinen Zinematika eta Dinamika
202
Egoera normalean, zuzenketarik gabe: 212
2⋅
⋅=
−=
zRneurriaHortze π
eta modulua: zRm ⋅
=2 denez
2m
e⋅
=π
Orain, zuzendutako hortzen lodiera: (1)
Non: ϕ : Tailatzeko erabili den kremaileraren angelua x: Aplikatutako zuzenketa Zuzendutako gurpilak engranatzeko, funtzionatzen jarriko ditugun engranajeen artean hortzen lodieren baturak hortz-neurria eman beharko du, honela:
vVVV mPee ⋅==+ π21 '' Eta hortzen lodiera funtzionamenduko jatorrizko zirkunferentzian:
( ) ( )( ) ( ) ( )( )
−+=
−−= VVVVVVVVVV EEReReedoEE
ReRe ϕϕϕϕ 2''2''
1
111
1
111
( ) ( )( )
−+= VVVVV EEReRe ϕϕ2''2
222
Beraz:
vVVV mPee ⋅==+ π21 ''
( ) ( )( ) ( ) ( )( ) VVVVVVVVV mEEReREE
ReR ⋅=
−++
−+ πϕϕϕϕ 2'2'
2
22
1
11
ϕπ tgmxme ⋅⋅+⋅
= 22
'

Mekanismo eta Makinen Zinematika eta Dinamika
203
Zuzendu gabe edo zuzendutako engranajeetan oinarrizko erradioa konstante mantentzen denez :
VVVV
VVVV
RRRR
RRRR
ϕϕϕϕρ
ϕϕϕϕρ
cos
coscoscos
cos
coscoscos
22222
11111
⋅=→→⋅=⋅=
⋅=→→⋅=⋅=
(2) eta (3)
Ekuazio nagusian (1), (2) eta (3) ekuazioak sartuz:
( ) ( )( ) ( ) ( )( ) VVVVV
VVVV
mEERtgmxm
REERtgmxm
R ⋅=
−+
⋅⋅+⋅⋅+
−+
⋅⋅+⋅⋅ πϕϕ
ϕπ
ϕϕϕϕ
ϕπ
ϕϕ 2
22
coscos2
22
coscos
2
2
21
1
1
( ) ( )( ) ( ) ( )( ) VVVVV
VVVV
mEERtgmxmEERtgmxm ⋅=
−⋅+⋅⋅+⋅+
−⋅+⋅⋅+⋅ πϕϕϕπϕϕϕϕϕπ
ϕϕ
2211 222cos
cos222cos
cos
( ) ( )( ) ( ) ( )( ) VVVV
VVVV
V mEERtgmxmddEERtgmxm
dd ⋅=
−⋅+⋅⋅+⋅+
−⋅+⋅⋅+⋅ πϕϕϕπϕϕϕπ
2211 222
222
( )( )
( ) ( )( ) ( )( )
( ) ( )( ) VVVV
V
VVV
V
mEEzmtgmxmzzmzzm
EEzmtgmxmzzmzzm
⋅=
−⋅⋅+⋅⋅+⋅++
+
−⋅⋅+⋅⋅+⋅++
πϕϕϕπϕϕϕπ2
222
2
22
222
2
2 22
21
211
1
21
21
( ) ( )( ) ( ) ( )( ) πϕϕϕπϕϕϕπ =
−+⋅++
−+⋅+ VVVVVV EEztgxEEztgx 2211 22
22
( ) ( )( ) ( ) ( )( ) 022 2211 =−+⋅+−+⋅ VVVVVV EEztgxEEztgx ϕϕϕϕϕϕ Amaieran:
Edo
Ariketako datuekin jarraituz:
( ) ( )( ) ( ) ( ) ( )( ) ( ) 641,0º2021614º20º14,252
2121 =
⋅
+⋅−=
⋅
+⋅−=+ tgEEtg
zzEExx VVVVV ϕϕϕ
( ) ( ) ( )21
212zzxxEE VVV
+
+⋅+= ϕϕ ( ) ( )( ) ( )
ϕϕϕ tg
zzEExx VVV⋅
+⋅−=+2
2121

Mekanismo eta Makinen Zinematika eta Dinamika
204
Ondorioa: Zuzenketan 641,021 =+ xx ematen digu, eta interferentziarik ez izateko aurretik ateratako baldintzak 181,01 ≥x eta 064,02 ≥x dira. Beraz, onargarria da, baldintza normaletan tailatu diren eta zuzenduak izan diren engranajeek interferentziarik gabe lan egingo dutelako.

Mekanismo eta Makinen Zinematika eta Dinamika
205
_ESPEKAK

Mekanismo eta Makinen Zinematika eta Dinamika
206
9 MEKANISMO ESZENTRIKOAK (ESPEKAK) Espeka bat, biraketa-, translazio- edo oszilazio-mugimendu sinple bat duen elementu bat da, bere formagatik aurrez finkatutako ezaugarriak dituen mugimendu bat transmititzen diona haztagailu edo jarraitzaile izeneko pieza bati. Espeka-gurpila, haztagailuari kontaktu labainkor baten bitartez lotua dago. Mekanismo espekadunek oso moldakorrak dira, translazio- edo biraketa-mugimendu arruntekin jarraitzailean mugimendu konplexuak lor daitezkeelako. Espekek makina askotan eginkizun garrantzitsu bat dute, bereziki inprimatzeko makinetan, ehungintza-industrian, makina-erreminta automatikoetan …. Bere eremuan, espeken aplikazioak mugagabeak dira.
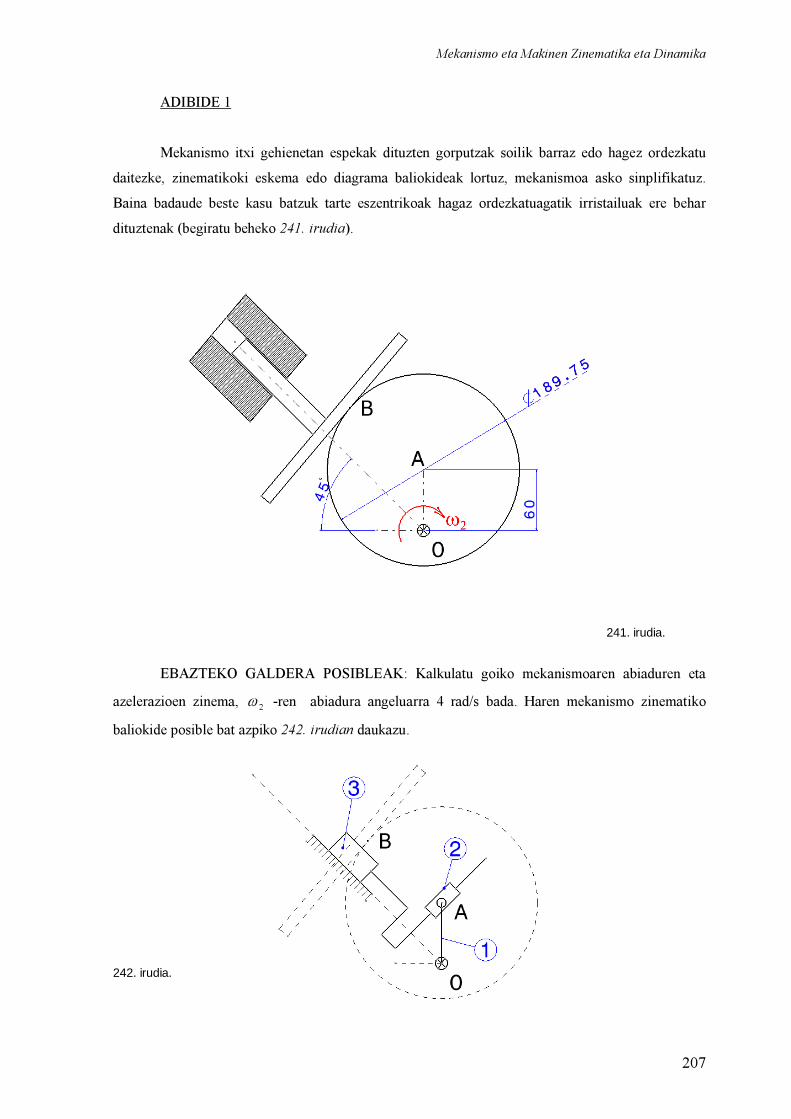
Mekanismo eta Makinen Zinematika eta Dinamika
207
ADIBIDE 1 Mekanismo itxi gehienetan espekak dituzten gorputzak soilik barraz edo hagez ordezkatu
daitezke, zinematikoki eskema edo diagrama baliokideak lortuz, mekanismoa asko sinplifikatuz. Baina badaude beste kasu batzuk tarte eszentrikoak hagaz ordezkatuagatik irristailuak ere behar dituztenak (begiratu beheko 241. irudia).
241. irudia. EBAZTEKO GALDERA POSIBLEAK: Kalkulatu goiko mekanismoaren abiaduren eta
azelerazioen zinema, 2ω -ren abiadura angeluarra 4 rad/s bada. Haren mekanismo zinematiko baliokide posible bat azpiko 242. irudian daukazu.
242. irudia.
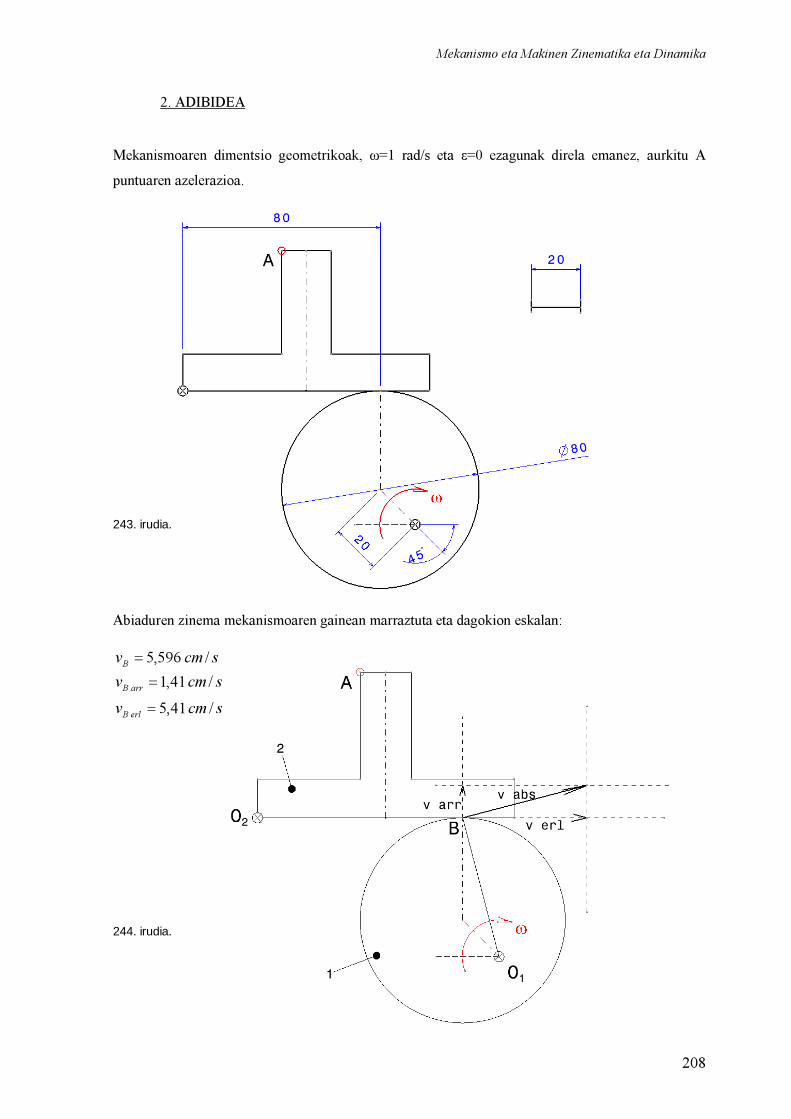
Mekanismo eta Makinen Zinematika eta Dinamika
208
2. ADIBIDEA Mekanismoaren dimentsio geometrikoak, ω=1 rad/s eta ε=0 ezagunak direla emanez, aurkitu A puntuaren azelerazioa. 243. irudia.
Abiaduren zinema mekanismoaren gainean marraztuta eta dagokion eskalan:
scmv
scmv
scmv
erlB
arrB
B
/41,5/41,1/596,5
=
=
=
244. irudia.
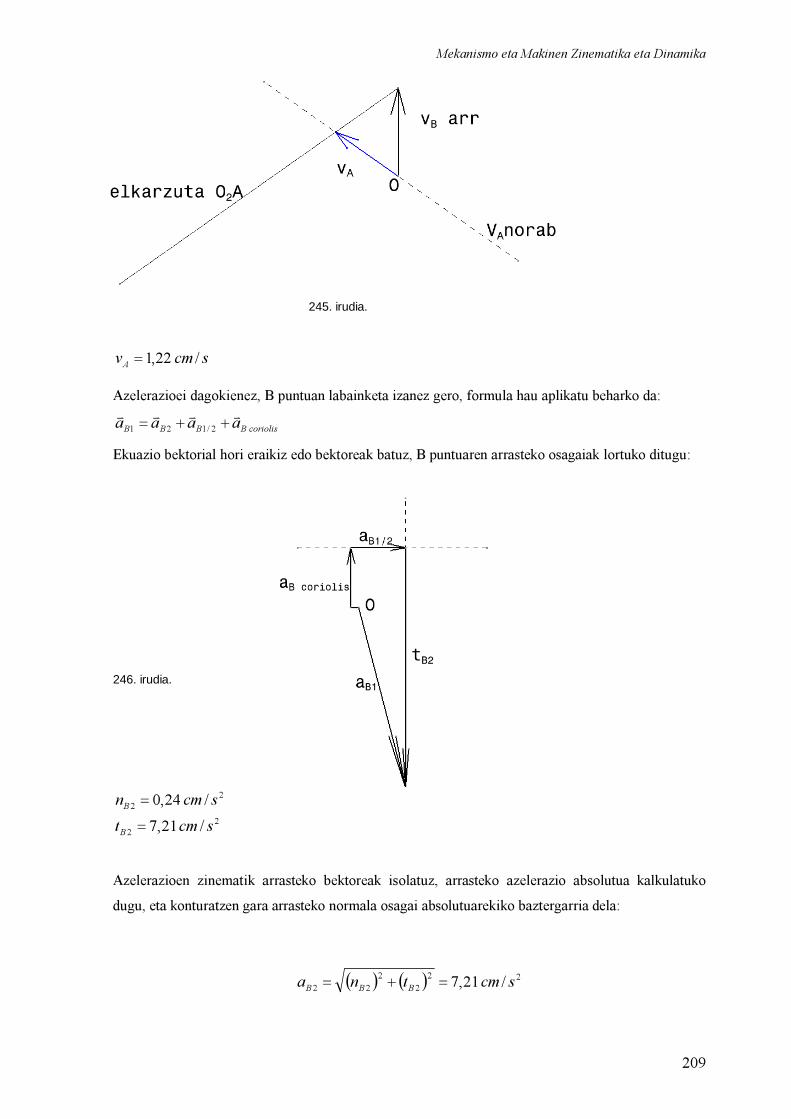
Mekanismo eta Makinen Zinematika eta Dinamika
209
245. irudia.
scmvA /22,1= Azelerazioei dagokienez, B puntuan labainketa izanez gero, formula hau aplikatu beharko da:
coriolisBBBB aaaavvvv
++= 2/121 Ekuazio bektorial hori eraikiz edo bektoreak batuz, B puntuaren arrasteko osagaiak lortuko ditugu: 246. irudia.
22
22
/21,7/24,0scmt
scmn
B
B
=
= Azelerazioen zinematik arrasteko bektoreak isolatuz, arrasteko azelerazio absolutua kalkulatuko dugu, eta konturatzen gara arrasteko normala osagai absolutuarekiko baztergarria dela:
( ) ( ) 222
222 /21,7 scmtna BBB =+=
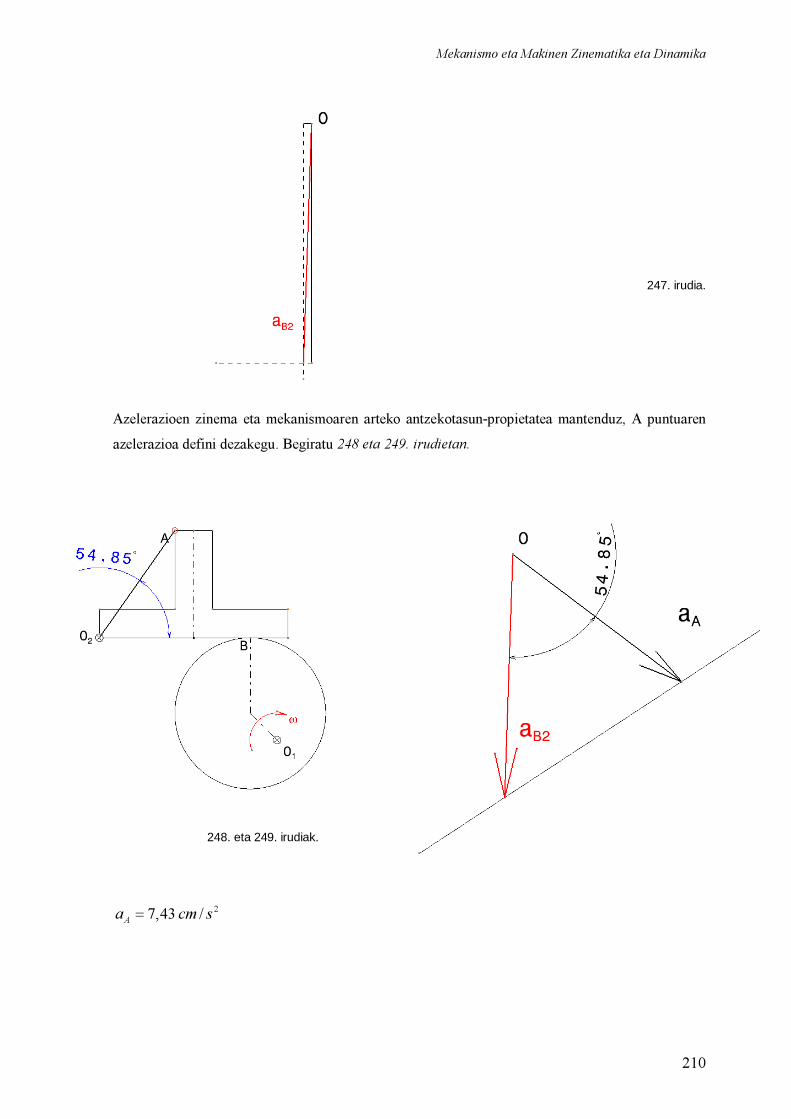
Mekanismo eta Makinen Zinematika eta Dinamika
210
247. irudia. Azelerazioen zinema eta mekanismoaren arteko antzekotasun-propietatea mantenduz, A puntuaren azelerazioa defini dezakegu. Begiratu 248 eta 249. irudietan.
248. eta 249. irudiak.
2/43,7 scmaA =
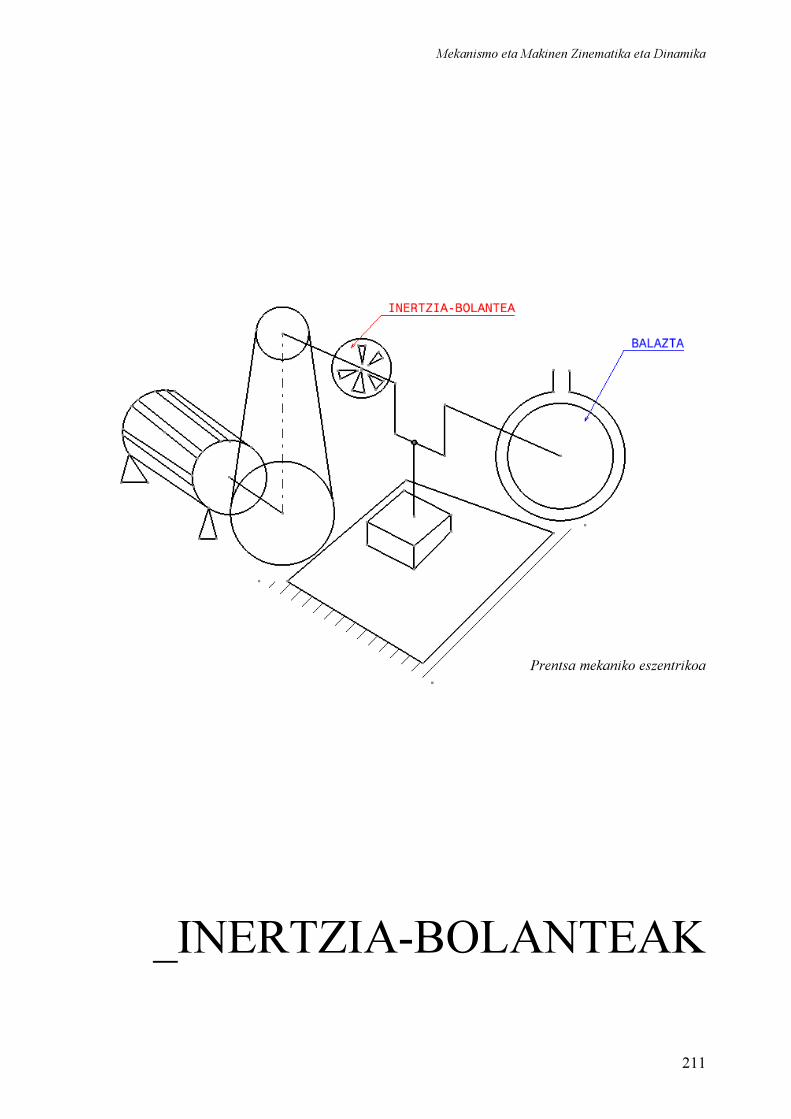
Mekanismo eta Makinen Zinematika eta Dinamika
211
Prentsa mekaniko eszentrikoa
_INERTZIA-BOLANTEAK
Mekanismo eta Makinen Zinematika eta Dinamika
212
10 INERTZIA-BOLANTEAK Mekanikan, inertzia-bolantea elementu guztiz pasibo bat da, sistemari inertzia gehigarri bat ematen diona. Bolanteak bere mugimenduari jarraitzen dio, mugimendua eragiten duen motor-parea eteten denean. Modu horretan, inertzia-bolanteak azelerazio edo gelditze bortitz bati aurre egiten dio. Hala, abiadura-gorabeherak murriztea lortzen da. Horrelako elementuak beharrezkoak dira, makina higiarazle gehienek biela-biradera mekanismo batetik mugimendu jarraitua duen arbola batera transmititzen dutelako lana. Lan horren jatorria lurrunaren hedapena, eztanda edo karburatutako nahasketen errekuntzatik atera daiteke. Haien aplikazio batzuk lurrunezko tren-makina, prentsa mekaniko eszentrikoa, automobil baten motorra, ehungailuak… dira. Motorren zikloen fase guztiek ez dute garrantzi berdina energia-ekoizpenean; gainera, biela-biradera mekanismoak ez du pare konstante bat ziurtatzen. Makina ziklikoetan eta zikloaren barruan motor-parean edo karga-parean (motorrari eskatzen zaion parean) aldaketak daudenean abiadura-aldaketak murrizteko erabiltzen dira inertzia-bolanteak. Oro har, bolantea gurpil edo disko bat izaten da, burdinurtuzkoa edo altzairuzkoa, eta motor-arbola batean itsatsia. Haren dimentsioak sistemaren ezaugarri orokorren arabera egongo dira kalkulatuta. Hegazkinen motorretan, adibidez, helizeak berak inertzia-bolantearen funtzioa ere egiten du.
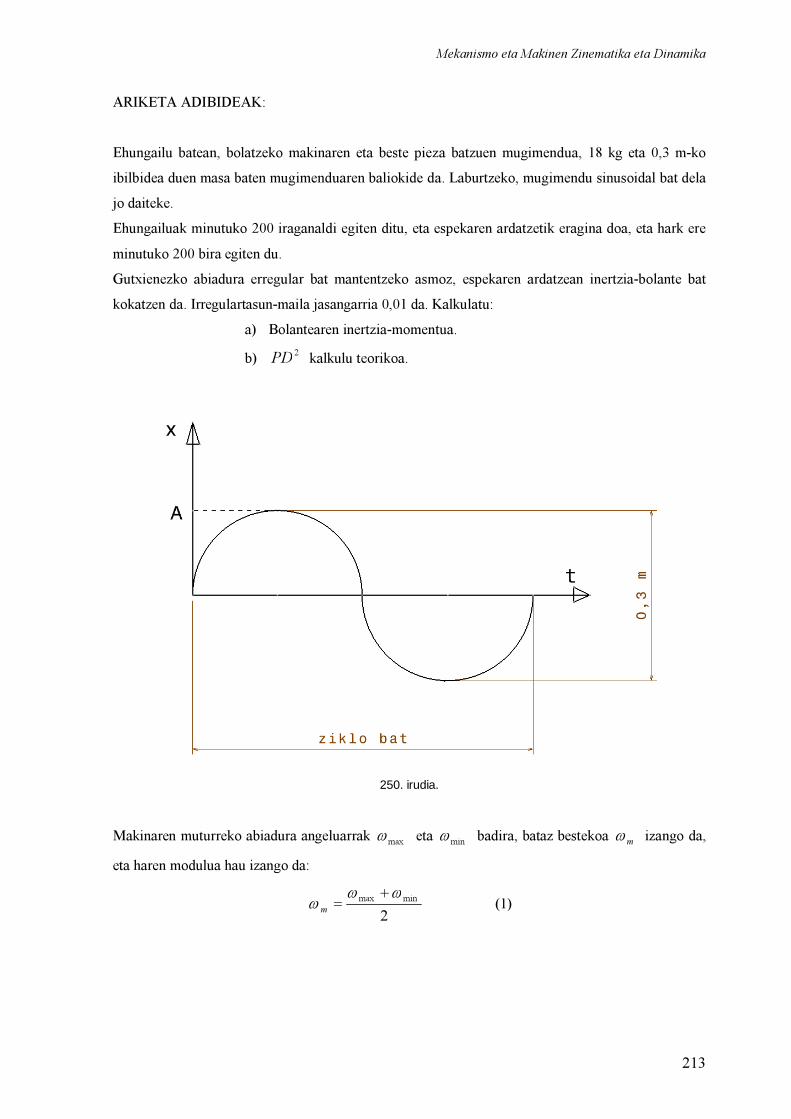
Mekanismo eta Makinen Zinematika eta Dinamika
213
ARIKETA ADIBIDEAK: Ehungailu batean, bolatzeko makinaren eta beste pieza batzuen mugimendua, 18 kg eta 0,3 m-ko ibilbidea duen masa baten mugimenduaren baliokide da. Laburtzeko, mugimendu sinusoidal bat dela jo daiteke. Ehungailuak minutuko 200 iraganaldi egiten ditu, eta espekaren ardatzetik eragina doa, eta hark ere minutuko 200 bira egiten du. Gutxienezko abiadura erregular bat mantentzeko asmoz, espekaren ardatzean inertzia-bolante bat kokatzen da. Irregulartasun-maila jasangarria 0,01 da. Kalkulatu:
a) Bolantearen inertzia-momentua. b) 2PD kalkulu teorikoa.
250. irudia. Makinaren muturreko abiadura angeluarrak maxω eta minω badira, bataz bestekoa mω izango da, eta haren modulua hau izango da:
2minmax ωω
ω+
=m (1)

Mekanismo eta Makinen Zinematika eta Dinamika
214
Irregulartasun-maila erabiltzen den makinaren funtzio arautu bat da, eta ehungailuaren kasuan 0,01 balio du. Haren kalkulua:
mωωωδ minmax −= (2)
Higidura harmoniko sinplearen legearen arabera:
( )ϕω +⋅⋅= tAx sin non: A: anplitudea ω: pultsazio natural edo propioa φ: desfasea Bolatzeko makinaren kokapena denboraren funtzio gisa lor daiteke, eta, gure kasuan, ezaguna da: A= 0,15 m Ehungailuaren pultsazio edo abiadura angeluarra ere ezagutzen dugu, eta Sistema Internazionaleko unitatetan;
sradbirasbira
radm /94,20min20060
min2=⋅⋅==
πωω
Orain, denboraren funtzioa den higidura harmoniko sinplearen ekuazioa deribatuz, abiadura lortuko dugu noski:
( )ϕωω +⋅⋅−== tAvdtdx
cos Abiadura maximoa eta minimoak, energia zinetiko maximo eta minimoak bezala:
JEvJvmEsmAv
C
C
0079,8814,3182
121/14,394,2015,0
minmin
22maxmaxmax
=→→=
=⋅=⋅=→→=⋅=⋅−= ω
Eta energia zinetikoaren aldaketa maximoa:
JEEE CCC 79,88minmax =−=∆
Mekanismo eta Makinen Zinematika eta Dinamika
215
Jotzen badugu makinaren inertzia-momentu totala konstantea dela: ( ) ( ) ( )( )minmaxminmax
2min
2maxminmax 2
121
21
ωωωωωω −+⋅=⋅−⋅=−=∆ IIIEEE CCC Ariketa honetan izendatu ditugun (1) eta (2) ekuazioak aurreko horretan ordezkatuz:
( ) δωωδω ⋅⋅=⋅⋅⋅⋅=∆ 2221
mmmC IIE Ondorioz, gure kasuan makinak behar duen irregulartasun-mailarako (δ=0,01) eta kalkulatutako mω -rako, hau izango da inertzia-momentu totala: b) Makinaren inertzia-momentua, bolantearen inertzia-momentuarekin konparaturik baztergarria ez bazen, inertzia-momentu totala makinaren laburtutako inertzia-momentu erresistentea kenduz kalkulatuko litzateke:
RV III −=
Industrian, bolantearen inertziak ez dira erabiltzen, VI -rekiko proportzionala den 2PD magnitude ezagun eta proportzionala baizik. Bolantearen erradioen masa baztergarria dela eta masa haguneankontzentratua dagoela emanez:
2RmIV ⋅=
non: m: hagunean kontzentratutzat jotzen den masa R: bolantearen erradioa, edo kontzentratutako masaren eta bolantearen zentroaren arteko distantzia Aurreko adierazpenak forma hau har dezake:
gPDD
gPIV 44
22
=⋅=
( ) ( )2
22 25,20/94,2001,079,88 mkgsradm
JEIm
C ⋅=⋅
=⋅∆=ωδ
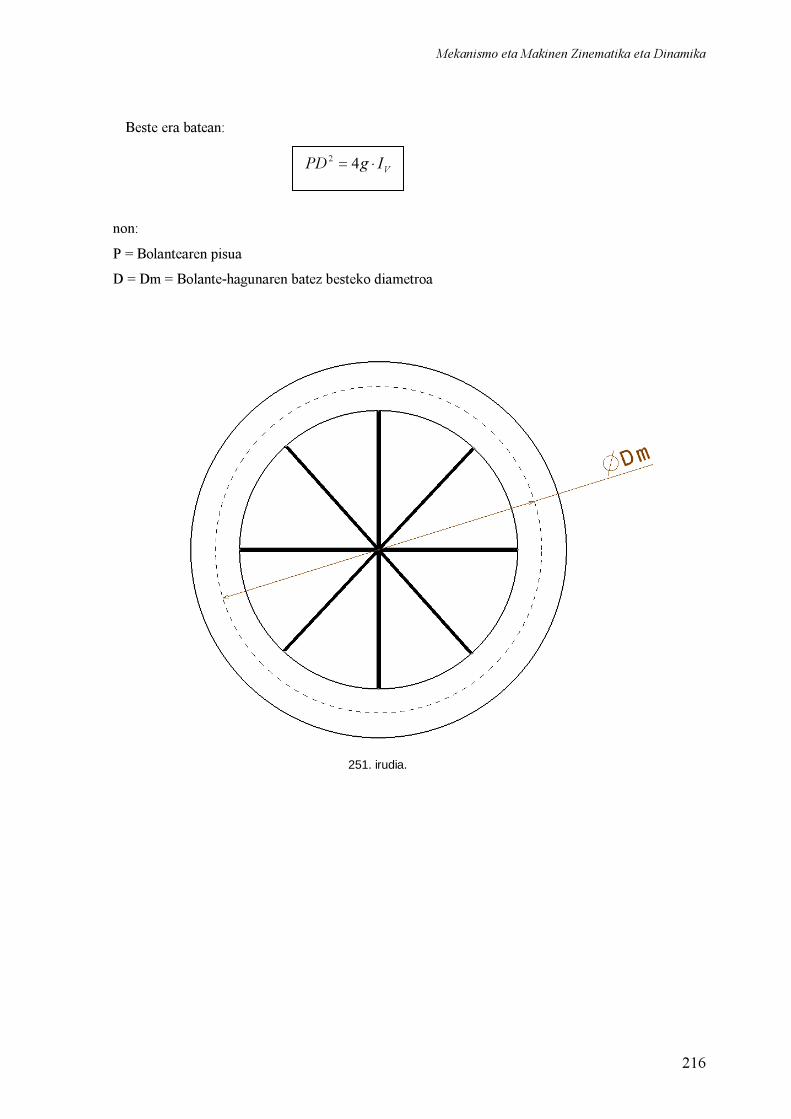
Mekanismo eta Makinen Zinematika eta Dinamika
216
Beste era batean:
non: P = Bolantearen pisua D = Dm = Bolante-hagunaren batez besteko diametroa
251. irudia.
VIgPD ⋅= 42
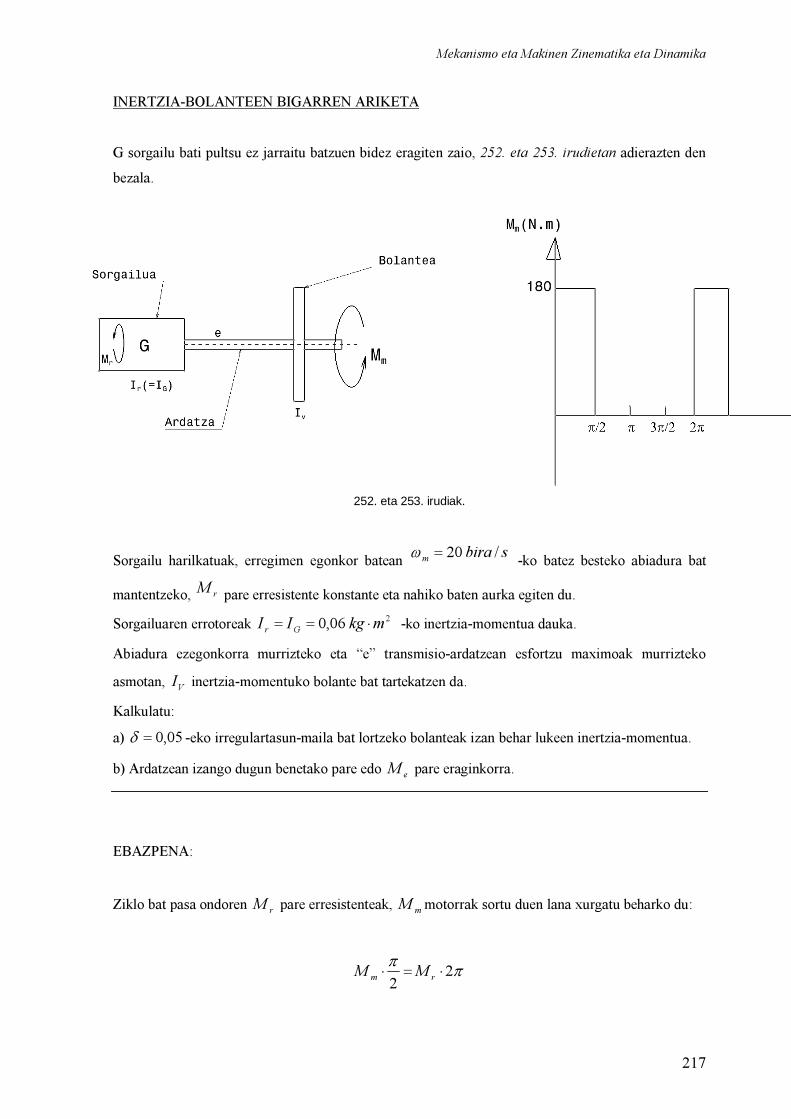
Mekanismo eta Makinen Zinematika eta Dinamika
217
INERTZIA-BOLANTEEN BIGARREN ARIKETA G sorgailu bati pultsu ez jarraitu batzuen bidez eragiten zaio, 252. eta 253. irudietan adierazten den bezala.
252. eta 253. irudiak.
Sorgailu harilkatuak, erregimen egonkor batean sbiram /20=ω -ko batez besteko abiadura bat mantentzeko, rM pare erresistente konstante eta nahiko baten aurka egiten du. Sorgailuaren errotoreak 206,0 mkgII Gr ⋅== -ko inertzia-momentua dauka. Abiadura ezegonkorra murrizteko eta “e” transmisio-ardatzean esfortzu maximoak murrizteko asmotan, VI inertzia-momentuko bolante bat tartekatzen da. Kalkulatu: a) 05,0=δ -eko irregulartasun-maila bat lortzeko bolanteak izan behar lukeen inertzia-momentua. b) Ardatzean izango dugun benetako pare edo eM pare eraginkorra. EBAZPENA: Ziklo bat pasa ondoren rM pare erresistenteak, mM motorrak sortu duen lana xurgatu beharko du:
ππ 22
⋅=⋅ rm MM

Mekanismo eta Makinen Zinematika eta Dinamika
218
mNMM rr ⋅=→⋅=⋅ 4522180 ππ
Ziklo guztian zehar pare erresistentearen balioa konstantea izango da, eta mN ⋅45 baliokoa. Ziklo baten barnean energia zinetikoaren aldakuntza maximoa, pultsuan zehar motor-pareak sortzen duen gehiegizko lanak emango du, hau da, azalerak.
254. irudia.
JradmNA ππ 5,672135 =⋅⋅=
Makina honetan, edo makina atal honetan, beharrezkoa izango da inertzia-momentu total bat:
rV III +=
( ) ( ) ( )2
222 268,022005,0
5,67 mkgEAzaleraIIIm
C
mrV ⋅=
⋅⋅⋅⋅=
⋅∆=
⋅=+=
ππ
ωδωδ
Sorgailuaren inertzia erresistentea 206,0 mkgII Gr ⋅== denez, bolantearen inertzia:
2208,0 mkgIII rV ⋅=−=

Mekanismo eta Makinen Zinematika eta Dinamika
219
b) Bolantearen eta sortzailearen azelerazio angeluarrak hauek izango dira: Jakinik pare bat inertziaren eta azelerazio angeluarraren biderkadurak ematen duela, eta bolantearen pare erresultantea beraren irteera eta sarrerako aldaketaren emaitza izango dela:
V
emV I
MM −=ε
Eta sortzailearen kasuan:
r
rer I
MM −=ε
Sorgailu eta bolantea ardatz berean biratzen direnez, haien azelerazio angeluarrak berdinak izango dira. Beraz:
rV εε =
r
re
V
em
IMM
IMM −
=−
Ekuazioa moldatuta:
( ) ( )
rVeVermr
Vreemr
MIMIMIMI
IMMMMI
−=−
−=−
Orain, ardatzaren benetako parea edo efektiboa:
Vr
Vrrme II
IMIMM+
⋅+⋅=
Hau da, mM eta rM -ren bitartekoa izango da eM :
Vr
Vr
Vr
rme II
IMII
IMM+
⋅++
⋅=
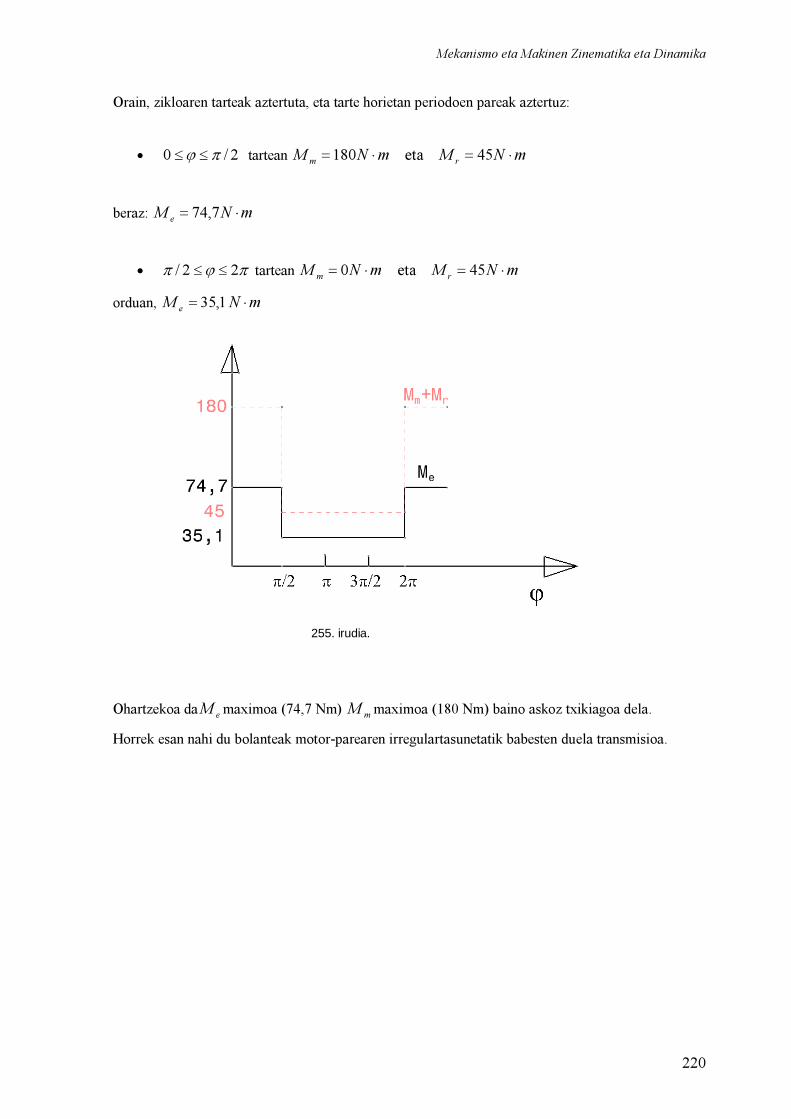
Mekanismo eta Makinen Zinematika eta Dinamika
220
Orain, zikloaren tarteak aztertuta, eta tarte horietan periodoen pareak aztertuz: • 2/0 πϕ ≤≤ tartean mNMmNM rm ⋅=⋅= 45eta180
beraz: mNM e ⋅= 7,74 • πϕπ 22/ ≤≤ tartean mNMmNM rm ⋅=⋅= 45eta0
orduan, mNM e ⋅= 1,35 255. irudia.
Ohartzekoa da eM maximoa (74,7 Nm) mM maximoa (180 Nm) baino askoz txikiagoa dela. Horrek esan nahi du bolanteak motor-parearen irregulartasunetatik babesten duela transmisioa.
Mekanismo eta Makinen Zinematika eta Dinamika
221
_ENGRANAJE-TRENAK
Mekanismo eta Makinen Zinematika eta Dinamika
222
11 ENGRANAJE-TRENAK Sarritan ezinezkoa da hortz pare batekin bakarrik transmisio-erlazio bat lortzea. Muga honen arrazoi nagusiak hiru dira :
1. Oso erosoa da engranaje normalizatuak erabiltzea transmisiorako, hortz kopuru ezberdinen sorta zabalagoa aurkituko dugulako. Gerta daiteke nahi dugun transmisiorako behar den gurpil parea merkatuan ez izatea.
2. Engranaje bat egiteko, hortz kopuru minimoa eta maximoa tailatzeko arazoek zehaztuko dute, gurpil baten hortz kopurua, zeren eta minimora ez iritsiz gero edo maximoa gaindituz gero hortzei neurri desegokiak emango bailitzaieke eta, tailatzean, erroreen portzentajea handitu egingo bailitzateke.
3. Ardatzen arteko distantzia handiegia izatea transmisioa bi gurpilekin bakarrik egin ahal izateko, ardatzen dimentsioa arrunta edo normalizatua baino handiagoa izatea, edo proiektuaren baldintzek ez uztea.
Engranaje-trenak aztertzeko, bi mota bereiziko ditugu:
a) Ardatz finkoen trenak. b) Tren epizikloidalak.

Mekanismo eta Makinen Zinematika eta Dinamika
223
TRANSMISIO-ERLAZIOA (WILLIS-EN FORMULA) Engranaje-trenetan oso hedatua dagoen kontzeptu edo formula da Willis-ena. Treneko lehen ardatzaren abiadura angeluarra eta azkenarena euskarriarenarekin erlazionatzen ditu. Lehen ardatzaren euskarriarekiko abiadura erlatiboa:
eo ωω − Eta azken ardatzaren euskarriarekiko abiadura erlatiboa :
ea ωω − Baina abiadura erlatibo horiek ardatzen abiadurak adierazten dizkigute, euskarria finko dagoela emanez, eta haien zatidura:
eo
ea
ωω
ωω
−
−
Ondorioz, transmisio-erlazioari µ deitzen badiogu, Willis-en formula lortuko dugu:
eo
ea
ωωωωµ
−
−=
Gogoratu behar dugu transmisio-erlazioa gurpil eragileen hortz kopuruaren eta gurpil gidatuen hortz kopuruen arteko zatiduratik irteten dela. TREN DIFERENTZIALAK
Tren diferentzialak tren epizikloidalak dira, non hiru ardatz koaxial edo ardazkide biratzen baitira, hau da, Willis-en formulan diharduten hiru ardatzek zeroz bestelakoak direnean.
Tren diferentzial batek edozein proportziotako bi mugimendu osatzeko, edo mugimendu bat bitan deskonposatzeko, balio du.
256. irudia.

Mekanismo eta Makinen Zinematika eta Dinamika
224
A eta E gurpilen eta euskarriaren abiaduren arteko erlazioa bilatzeko, Willis aplikatuko dugu:
eo
ea
ωωωωµ
−
−=
Gure kasu honetan:
eA
eD
ωωωωµ
−
−=
Eta hortik: eDeA ωωωµωµ −=⋅−⋅ Gero: ( )1−=−⋅ µωωωµ eDA Beraz:
DAe ωµ
ωµµω ⋅
−
−+⋅
−=
11
1
Hau da, euskarriaren abiadura A eta D ardatzen konbinazio lineal bat da. Ondorioz, “Tren diferentzialak bi mugimendu edozein proportziotan konposatzeko balio du, edo mugimendu bat beste bitan deskonposatzeko”. TREN BATUTZAILEA: Tren batutzaile bat 1−=µ -eko transmisio-erlazioa daukan tren diferentzial bat da. Hala, euskarriaren abiadura:
DAe ωµ
ωµµω ⋅
−
−+⋅
−=
11
1
DAe ωωω ⋅−−
−+⋅
−−
−=
111
111
2DA
eωω
ω+
= Ebazpen honetan ikus dezakegu euskarriaren abiadura A eta D ardatzen batezbesteko aritmetiko bat dela. Hala, euskarritik bi ardatzetara mugimendua eraman dezakegu, hau da, bi ardatzen abiaduren arteko diferentzia konpentsa dezakegu.
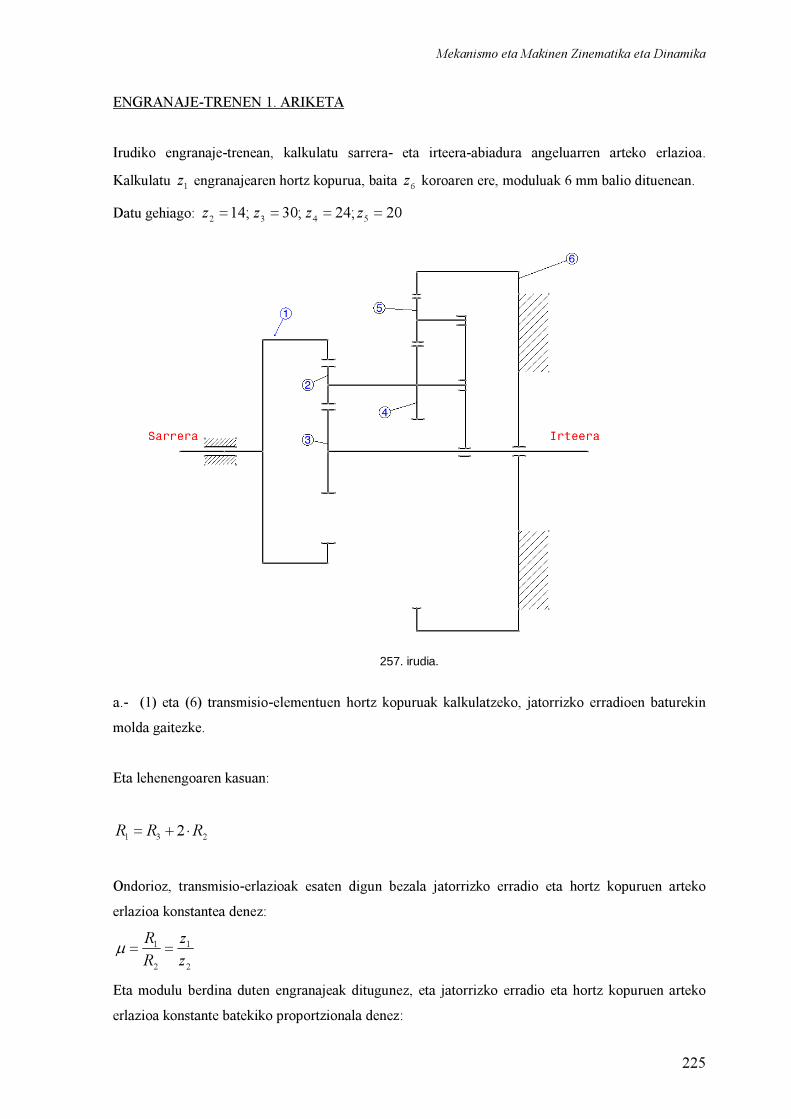
Mekanismo eta Makinen Zinematika eta Dinamika
225
ENGRANAJE-TRENEN 1. ARIKETA Irudiko engranaje-trenean, kalkulatu sarrera- eta irteera-abiadura angeluarren arteko erlazioa. Kalkulatu 1z engranajearen hortz kopurua, baita 6z koroaren ere, moduluak 6 mm balio dituenean. Datu gehiago: 20;24;30;14 5432 ==== zzzz
257. irudia. a.- (1) eta (6) transmisio-elementuen hortz kopuruak kalkulatzeko, jatorrizko erradioen baturekin molda gaitezke. Eta lehenengoaren kasuan:
231 2 RRR ⋅+= Ondorioz, transmisio-erlazioak esaten digun bezala jatorrizko erradio eta hortz kopuruen arteko erlazioa konstantea denez:
2
1
2
1
zz
RR==µ
Eta modulu berdina duten engranajeak ditugunez, eta jatorrizko erradio eta hortz kopuruen arteko erlazioa konstante batekiko proportzionala denez:

Mekanismo eta Makinen Zinematika eta Dinamika
226
2223
32
21
1zmRzmRzmR ⋅
=⋅
=⋅
= Orduan:
58142302 1231 =⋅+=→⋅+= zzzz Bestalde, koroaren jatorrizko erradioa:
54236 2 RRRRR ⋅+++= Beraz: 1082022414302 54236 =⋅+++=⋅+++= zzzzz b.- Orain, irteera- eta sarrera-abiaduren erlazioa ateratzeko, hau kalkulatu beharko da:
1
3
ωω
ωω
=
sarrera
irteera
Trenaren irteeran izango dugun abiadura angeluarra, trenaren sarrera-abiadurari satelite-etxeen abiadura kenduz lortuko da:
PTT ωωω −=' (1) Bestalde:
(2)
Zuzenean:
−=
=
3
2
2
3
2
1
1
2
''''
z
z
z
z
ω
ω
ω
ω
3
1
1
3
''
z
z−=
ω
ω
6
4
4
6
''
z
z−=
ω
ω

Mekanismo eta Makinen Zinematika eta Dinamika
227
(3) Tarteko gurpilak izaten badira ere, bagenekien tartekoek biraketa-noranzkoa aldatzen zutela,
baina abiadura angeluarren modulua ez da aldatzen. Badakigu, halaber, kanpoko gurpilen arteko transmisio-erlazioaren zeinua negatiboa dela
kanpo-engranaje pare baten artean abiaduren noranzkoaren aurkakoa delako; barneko engranajeen arteko transmisio batean, ordea, transmisioa positiboa izango da.
Orain, satelite-etxeen arteko abiadura kontuan hartuz, (1) eta (2) ekuazioak erlazionatuz:
3
1
1
3
''
z
z−=
ω
ω �3
1
1
3
z
z
p
p−=
−
−
ωω
ωω
(1) eta (3) ekuazioetatik:
6
4
4
6
''
z
z−=
ω
ω � 6
4
4
6
z
z
p
p−=
−
−
ωω
ωω
Koroa lurrean landatuta dagoenez, abiadura angeluar nulua izango du, eta 42 eta zz
ardazkideak direnez, haien abiadura berdina izango da. Orduan:
( )ppp
p
z
z
z
zωωω
ωω
ω−=>−−−=
−
−2
6
4
6
4
2
0
edo pp
z
zωωω +=
4
62
2. eta 1. engranajeak erlazionatuz, berriz:
2
1
1
2
''
z
z=
ω
ω �
−⋅
⋅=→=−→=−−
114
26
1
2
1
1
4
6
2
1
1
2
zz
zzz
zz
z
z
zp
p
p
p
p ωω
ωω
ω
ωω
ωω
Satelite-etxearen abiadura angeluarra: 14793,0 ωω ⋅=p

Mekanismo eta Makinen Zinematika eta Dinamika
228
Amaitzeko:
5256,01
3 −==ω
ω
ω
ω
sarrera
irteera
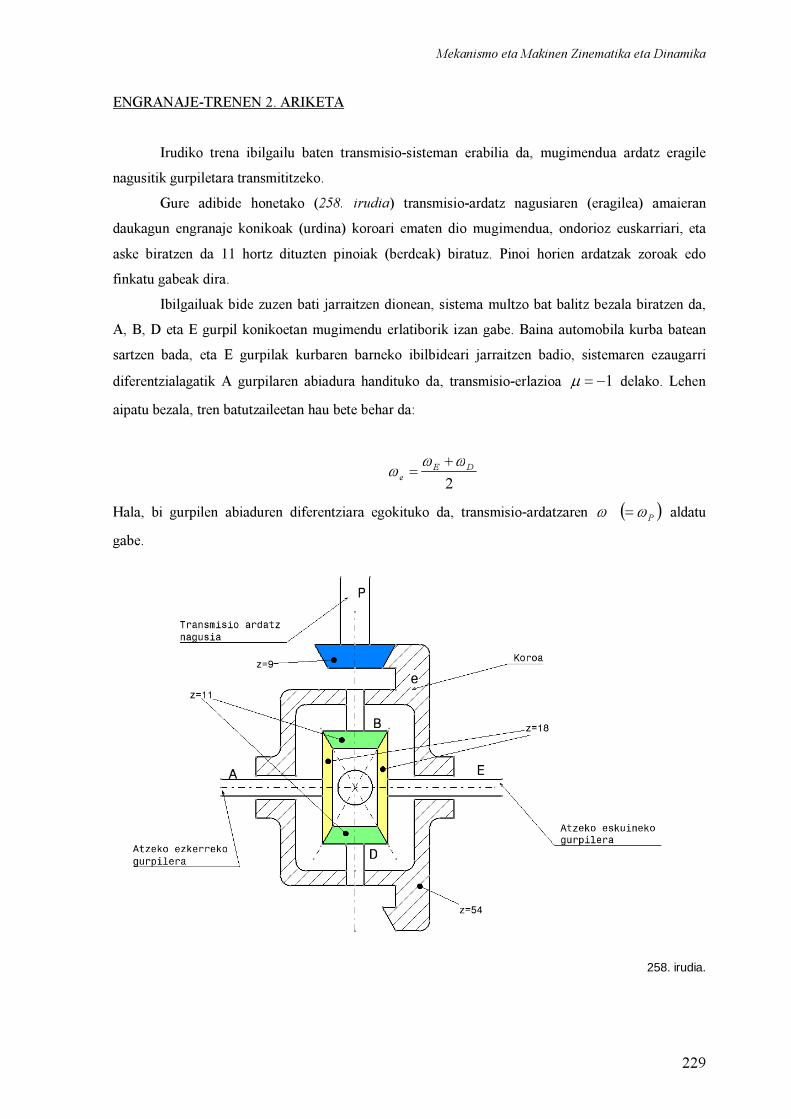
Mekanismo eta Makinen Zinematika eta Dinamika
229
ENGRANAJE-TRENEN 2. ARIKETA Irudiko trena ibilgailu baten transmisio-sisteman erabilia da, mugimendua ardatz eragile
nagusitik gurpiletara transmititzeko. Gure adibide honetako (258. irudia) transmisio-ardatz nagusiaren (eragilea) amaieran
daukagun engranaje konikoak (urdina) koroari ematen dio mugimendua, ondorioz euskarriari, eta aske biratzen da 11 hortz dituzten pinoiak (berdeak) biratuz. Pinoi horien ardatzak zoroak edo finkatu gabeak dira.
Ibilgailuak bide zuzen bati jarraitzen dionean, sistema multzo bat balitz bezala biratzen da, A, B, D eta E gurpil konikoetan mugimendu erlatiborik izan gabe. Baina automobila kurba batean sartzen bada, eta E gurpilak kurbaren barneko ibilbideari jarraitzen badio, sistemaren ezaugarri diferentzialagatik A gurpilaren abiadura handituko da, transmisio-erlazioa 1−=µ delako. Lehen aipatu bezala, tren batutzaileetan hau bete behar da:
2DE
eωω
ω+
= Hala, bi gurpilen abiaduren diferentziara egokituko da, transmisio-ardatzaren ω ( )Pω= aldatu gabe.
258. irudia.
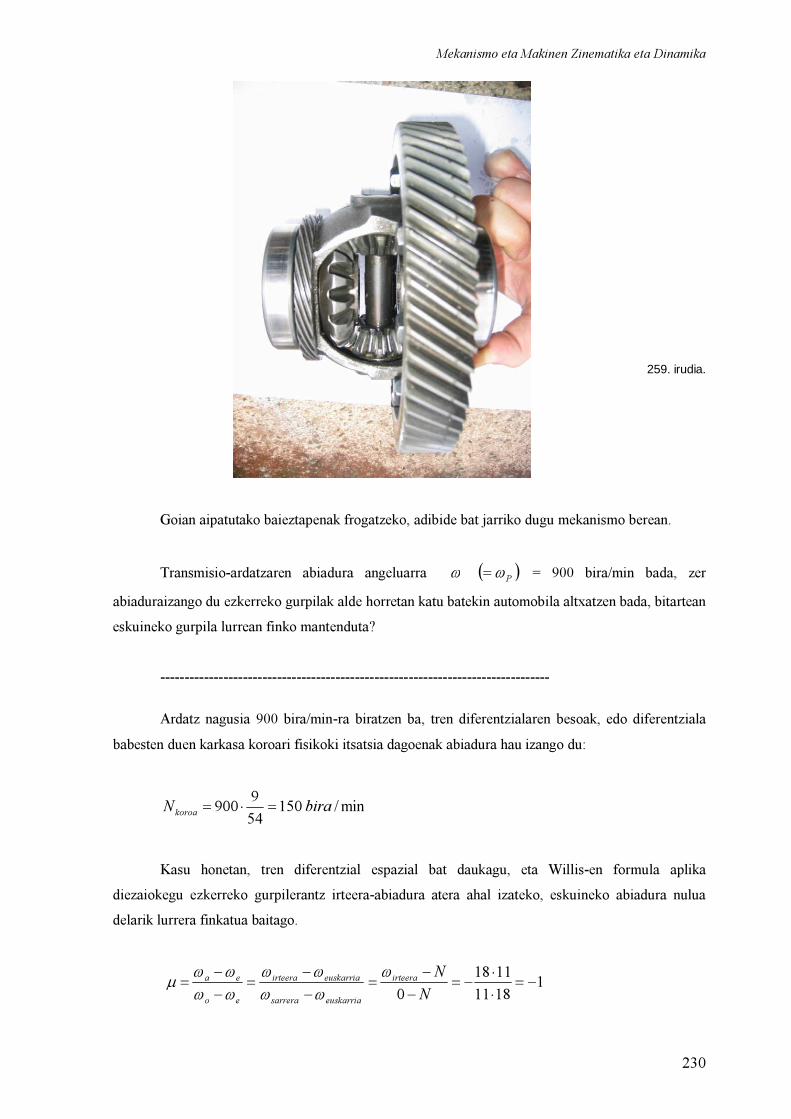
Mekanismo eta Makinen Zinematika eta Dinamika
230
259. irudia.
Goian aipatutako baieztapenak frogatzeko, adibide bat jarriko dugu mekanismo berean. Transmisio-ardatzaren abiadura angeluarra ω ( )Pω= = 900 bira/min bada, zer
abiaduraizango du ezkerreko gurpilak alde horretan katu batekin automobila altxatzen bada, bitartean eskuineko gurpila lurrean finko mantenduta?
--------------------------------------------------------------------------------
Ardatz nagusia 900 bira/min-ra biratzen ba, tren diferentzialaren besoak, edo diferentziala
babesten duen karkasa koroari fisikoki itsatsia dagoenak abiadura hau izango du:
min/150549900 biraN koroa =⋅=
Kasu honetan, tren diferentzial espazial bat daukagu, eta Willis-en formula aplika
diezaiokegu ezkerreko gurpilerantz irteera-abiadura atera ahal izateko, eskuineko abiadura nulua delarik lurrera finkatua baitago.
1
18111118
0−=
⋅
⋅−=
−
−=
−
−=
−
−=
NNirteera
euskarriasarrera
euskarriairteera
eo
ea ωωωωω
ωωωωµ

Mekanismo eta Makinen Zinematika eta Dinamika
231
min/3001502 birairteera =⋅=ω
Mekanismo eta Makinen Zinematika eta Dinamika
232
BIBLIOGRAFIA:
1. ROQUE CALERO PÉREZ, JOSE ANTONIO CARTA GONZÁLEZ. FUNDAMENTOS DE MECANISMOS Y MÁQUINAS PARA INGENIEROS. MC GRAW HILL. 1999
2. KENNETH J. WALDRON/ GARY L. KINZEL “KINEMATICS, DYNAMICS, AND DESIGN OF MACHINERY”. 2004
3. BEDFORD. FOWLER. MECÁNICA PARA INGENIERÍA. DINÁMICA. ADDISON WESLEY IBEROAMERICANA. 2008
4. J. MARTELL PÉREZ, A. RODRÍGUEZ TORRES, PEDRO RAMÓN MOLINER. ELEMENTOS DE MÁQUINAS. UNED (UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA). 2007
5. BEDFORD. FOWLER. MECÁNICA PARA INGENIERÍA. ESTATICA. ADDISON WESLEY IBEROAMERICANA. 2008
6. JOSE Mª BASTERO, JOAQUÍN CASELLAS. MEKANIKA IKASTAROA. EUNSA. 2006
7. BEER & JOHNSTON. MECÁNICA VECTORIAL PARA INGENIEROS. MCGRAW HILL. 2007
8. P.R. MOLINER. 134 PROBLEMAS DE TEORÍA DE MÁQUINAS Y MECANISMOS. CPDA, ETSEIB, UPB. 1981
9. P.R. MOLINER “CINEMÁTICA DE MÁQUINAS. DINÁMICA DE MÁQUINAS.” E.T.S.I.I. BARTZELONA.
10. SHIGLEY, J.E.; UICKER, J.J. “TEORÍA DE MÁQUINAS Y MECANISMOS.” MC. GRAW-HILL. 2003
11. GABRIEL MARÍA DASSO. MECANISMOS. UNIVERSIDAD NACIONAL DE LOMAS DE ZAMORA (ARGENTINA). 2005
12. JOSU AGIRREBEITIA. DOKTORETZA IKASTAROKO (1. MAILA) “ANÁLISIS CINEMÁTICO DE SISTEMAS MULTICUERPO. MÉTODOS BASADOS EN FUNCIONES DE POTENCIAL” IRAKASGAIAREN UNITATE DIDAKTIKOA. BILBOKO INGENIARITZA GOI ESKOLA. 2007/2008 IKASTURTEA
Mekanismo eta Makinen Zinematika eta Dinamika
233
13. ANTONIO BARRIENTOS. LUIS FELIPE PEÑÍN, CARLOS BALAGUER Y RAFAEL ARACIL.
FUNDAMENTOS DE ROBÓTICA. EDITORIALA: MC GRAW HILL. 2007
14. A LAMIKIZ, L. N. LÓPEZ DE LACALLE, O OCERIN, D DÍEZ (2008). THE DENAVIT AND HARTENBERG APPROACH APPLIED TO EVALUATE THE CONSEQUENCES IN THE TOOL TIP POSITION OF GEOMETRICAL ERRORS IN FIVE-AXIS MILLING CENTRES. INT J ADV MANUF TECHNOL 37:122-139
15. SLOCUM AH (1992) PRECISION MACHINE DESIGN. PRENTICE HALL, ENGLEWOOD CLIFFS, NEW JERSEY
16. IGOR ANSOATEGUI. ANTOLAKUNTZAKO INGENIARITZAKO KARRERA AMAIERAKO PROIEKTUA: SOFTWARE EZBERDINEN ANALISIAREN ALDERAPENA, “MEKANISMO ETA MAKINEN TEORIA” IRAKASGAIAREN LABORATEGIKO PRAKTIKEN ANTOLAKUNTZARAKO. 2005/2006 IKASTURTEA
17. I. ANSOATEGUI, A. LAMIKIZ, J. AGUIRREBEITIA. ESTIMACIÓN DE ERRORES DE POSICIÓN EN CENTROS DE MECANIZADO DE CINCO EJES. ARTÍCULO DEL XVIII CONGRESO NACIONAL DE INGENIERÍA MECÁNICA (CIUDAD REAL) 2010 AZAROA. ISSN: 0212-5072
18. MATLAB 7.0 BERTSIOAREN GIDA.
19. CATIA V5 BERTSIOAREN GIDA. DMU_ KINEMATICS MODULUA
20. ALFONSO HERNÁNDEZ ETA CHARLES PINTO. “TEORÍA DE MECANISMOS Y MÁQUINAS” IRAKASGAIAREN UNITATE DIDAKTIKOA. BILBOKO INGENIARITZA GOI ESKOLA. 1997/1998 IKASTURTEA
21. JUAN JOSÉ ARRUGAETA ETA UGUTZ GARITAONAINDIA. “MEKANISMO ETA MAKINEN TEORIA” IRAKASGAIAREN UNITATE DIDAKTIKOAK. GASTEIZKO INGENIARITZA UNIBERTSITATE ESKOLA. 2010/2011 IKASTURTEA.
22. WORKING MODEL 7.0 BERTSIOAREN GIDA.
Mekanismo eta Makinen Zinematika eta Dinamika
234
ESKERRAK: GASTEIZKO INGENIARITZA MEKANIKOA SAILARI, JUAN JOSE ARRUGAETA, IKER MARTÍNEZ DE ESTARRONA (ABGAM VITORIA-GASTEIZ, GRUPO SEGULA TECHNOLOGIES), JOSEBA MIRENA ORTIZ DE MENDIBIL, JUAN LUIS OSA, EKAITZ ZULUETA, UGUTZ GARITAONAINDIA, GONZALO CARLOS GONZALO, VANESSA GARCÍA, ISABEL SIMOES ( ESTA & IPT: ESCOLA SUPERIOR DE TECNOLOGIA DE ABRANTES & INSTITUTO POLITÉCNICO DE TOMAR, PORTUGAL), FRANCISCO JAVIER GARCÍA DE AMÉZAGA, GABRIEL MARÍA DASSO (UBA: UNIVERSIDAD DE BUENOS AIRES, ARGENTINA), ANA ISABEL BOYANO, MIKEL LARRAÑAGA, ISMAEL ETXEBARRIA, ABEL GIL, FERNANDO ONCALA, MIKEL ARROITIA (SUMINISTROS ARRALBE S.A.) MIKEL LOITI, DIONISIO ETA NICOLAS (UDALAITZ S.L. ARRASATE), NEUMÁTICOS PACO ENPRESA (VITORIA-GASTEIZ), ENGRANAJES JUARISTI ENPRESA (ZARAUTZ), ZAYER ENPRESA (VITORIA-GASTEIZ), TALGO S.A. ENPRESA (LOGROÑO), JOSU AGIRREBEITIA, AITZOL LAMIKIZ, EDORTA RAMOS ETA JAVIER MARTÍNEZ DE OLCOZ (ZAYER ENPRESA VITORIA-GASTEIZ).