Maquinas y mecanismos
18
MÁQUINAS Y MECANISMOS Presentación realizada por: Virgilio Marco Aparicio. Profesor de Apoyo al Área Práctica del IES Tiempos Modernos. ZARAGOZA
-
Upload
marco-antonio -
Category
Business
-
view
2.405 -
download
1
Transcript of Maquinas y mecanismos

MÁQUINAS Y MECANISMOS
Presentación realizada por:
Virgilio Marco Aparicio.
Profesor de Apoyo al Área Práctica del
IES Tiempos Modernos.
ZARAGOZA
MÁQUINAS Y MECANISMOS.
ÍNDICE
Los componentes de las máquinas
Los mecanismos
Palancas
Ruedas, levas y poleas
Sistemas de transmisión
La relación de transmisión
Manivelas y bielas
LOS COMPONENTES DE LAS
MÁQUINAS. Elementos.
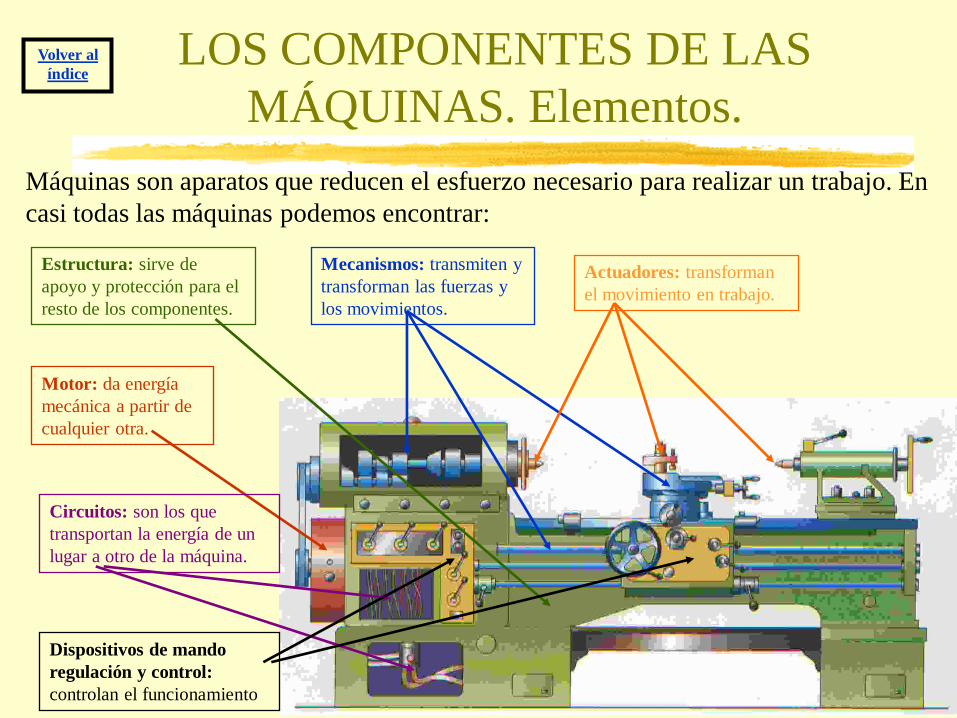
Máquinas son aparatos que reducen el esfuerzo necesario para realizar un trabajo. En
casi todas las máquinas podemos encontrar:
Estructura: sirve de
apoyo y protección para el
resto de los componentes.
Motor: da energía
mecánica a partir de
cualquier otra.
Mecanismos: transmiten y
transforman las fuerzas y
los movimientos.
Circuitos: son los que
transportan la energía de un
lugar a otro de la máquina.
Actuadores: transforman
el movimiento en trabajo.
Dispositivos de mando
regulación y control:
controlan el funcionamiento
Volver al
índice

LOS COMPONENTES DE LAS
MÁQUINAS. Circuitos hidráulicos y neumáticos.
Los circuitos hidráulicos o neumáticos son las partes por las que circula un fluido que en unos
es agua o aceite y en los otros aire comprimido. Suelen contener los siguientes elementos:
El generador. Se encarga de impulsar el fluido, suele ser una bomba de aire o un compresor.
Volver al
índice
Los conductores. Son tubos o tuberías de diferentes materiales
Los receptores. Son los que aprovechan el movimiento del fluido para obtener calor, movimiento, trabajo, etc.
Elementos de protección. Boyas, filtros, válvulas, que aseguran el funcionamiento del circuito sin riesgos.
Elementos de control y regulación del caudal. Grifos, válvulas, compuertas que cortan o dirigen el paso del fluido.
MECANISMOS. Tipos de movimientos.
Volver al
índice
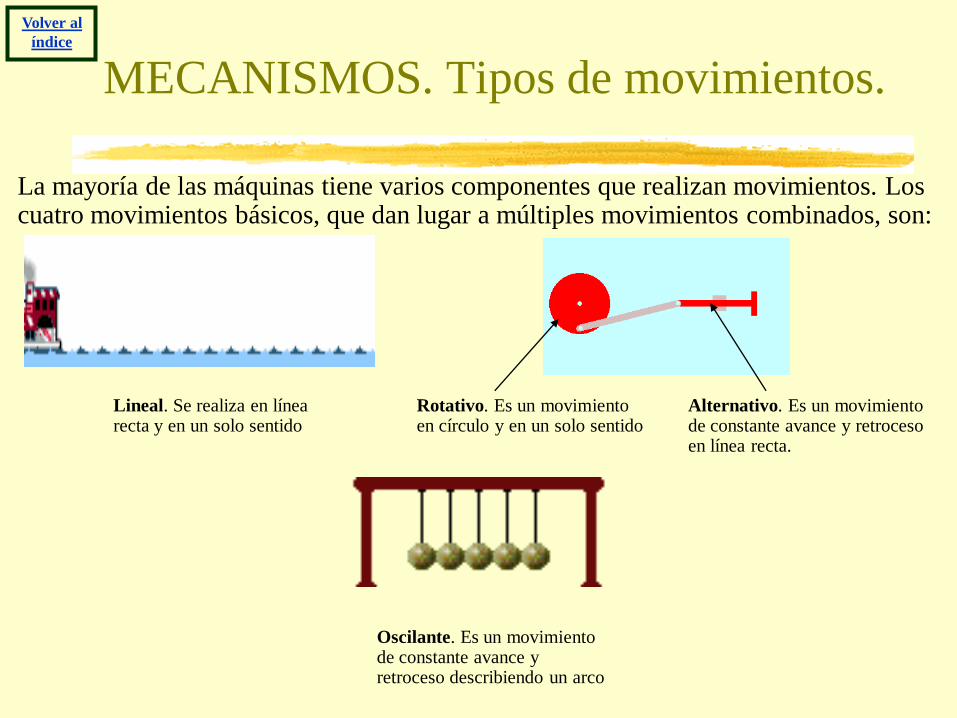
La mayoría de las máquinas tiene varios componentes que realizan movimientos. Los cuatro movimientos básicos, que dan lugar a múltiples movimientos combinados, son:
Lineal. Se realiza en línea recta y en un solo sentido
Alternativo. Es un movimiento de constante avance y retroceso en línea recta.
Rotativo. Es un movimiento en círculo y en un solo sentido
Oscilante. Es un movimiento de constante avance y retroceso describiendo un arco

MECANISMOS. Tipos de mecanismos.
Los mecanismos son elementos o combinaciones de elementos que transforman las fuerzas y los movimientos.Así nos permiten modificar su dirección e intensidad hasta lograr los que necesitamos. Algunos tipos de mecanismos son:
Engranajes.
Volver al
índice
Poleas.
Palancas. Bielas. Cigüeñales.
MECANISMOS. Ejemplo: tornillo - tuerca.
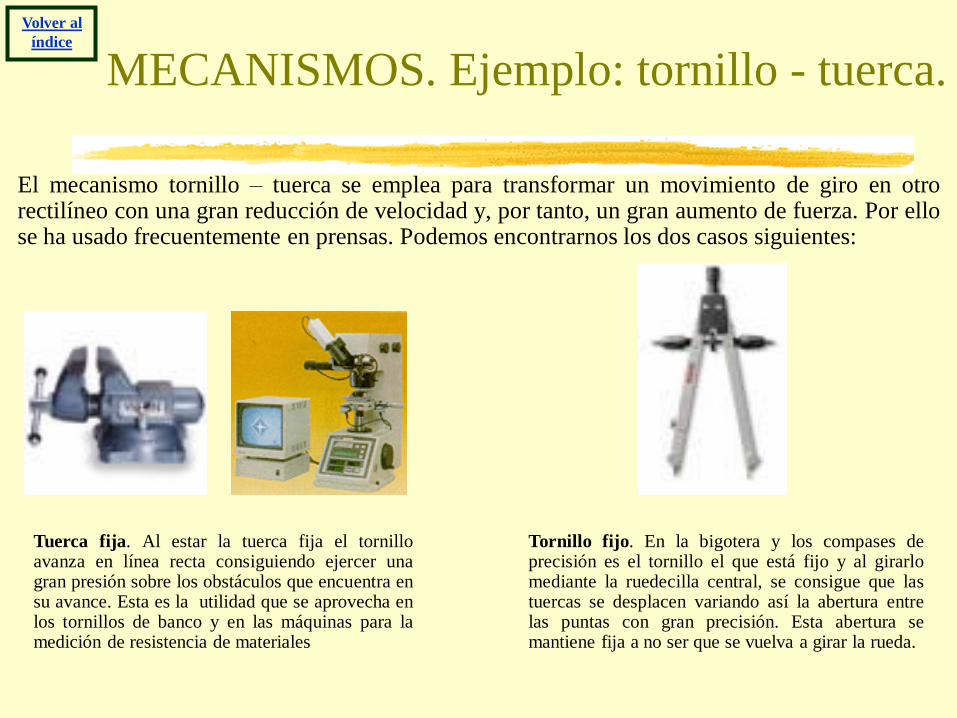
El mecanismo tornillo – tuerca se emplea para transformar un movimiento de giro en otrorectilíneo con una gran reducción de velocidad y, por tanto, un gran aumento de fuerza. Por ellose ha usado frecuentemente en prensas. Podemos encontrarnos los dos casos siguientes:
Tuerca fija. Al estar la tuerca fija el tornilloavanza en línea recta consiguiendo ejercer unagran presión sobre los obstáculos que encuentra ensu avance. Esta es la utilidad que se aprovecha enlos tornillos de banco y en las máquinas para lamedición de resistencia de materiales
Volver al
índice
Tornillo fijo. En la bigotera y los compases deprecisión es el tornillo el que está fijo y al girarlomediante la ruedecilla central, se consigue que lastuercas se desplacen variando así la abertura entrelas puntas con gran precisión. Esta abertura semantiene fija a no ser que se vuelva a girar la rueda.
PALANCAS. Usos
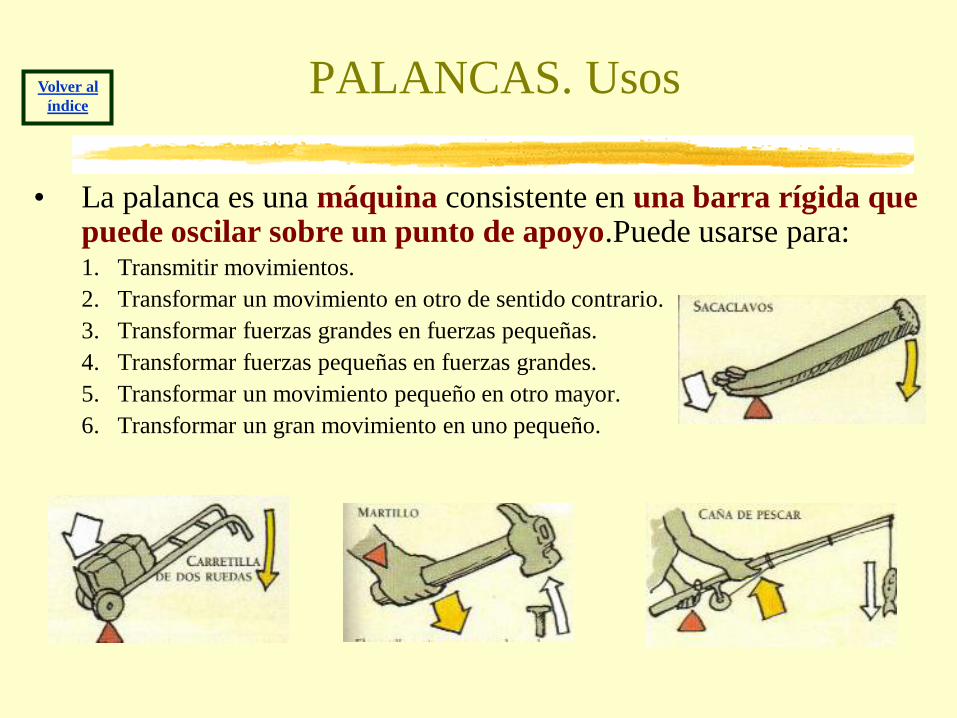
• La palanca es una máquina consistente en una barra rígida que puede oscilar sobre un punto de apoyo.Puede usarse para: 1. Transmitir movimientos.
2. Transformar un movimiento en otro de sentido contrario.
3. Transformar fuerzas grandes en fuerzas pequeñas.
4. Transformar fuerzas pequeñas en fuerzas grandes.
5. Transformar un movimiento pequeño en otro mayor.
6. Transformar un gran movimiento en uno pequeño.
Volver al
índice
PALANCAS. Tipos 1
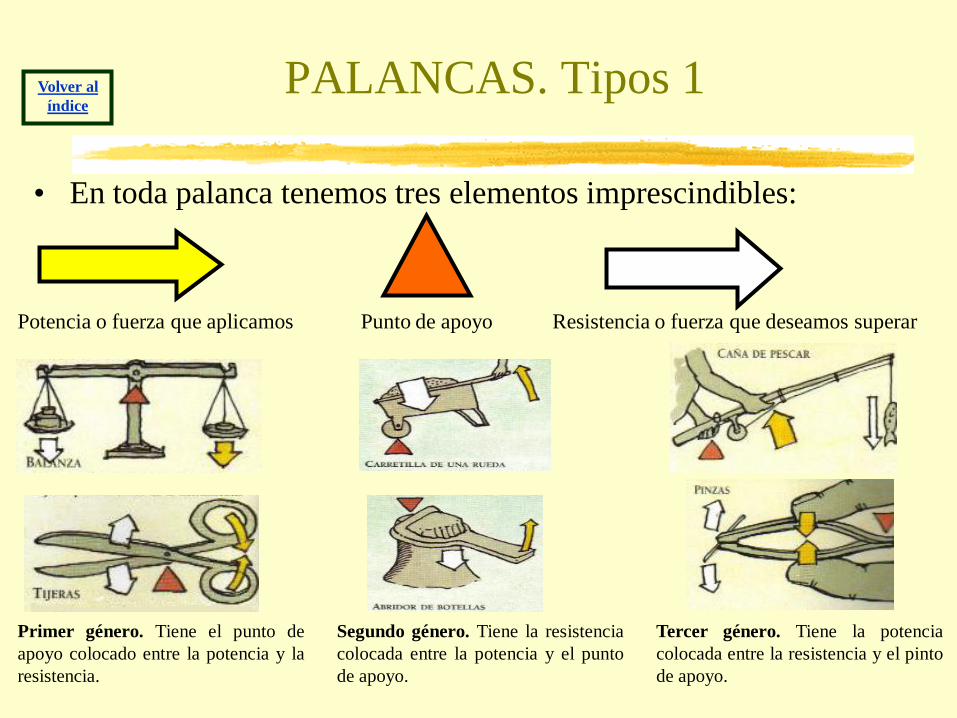
• En toda palanca tenemos tres elementos imprescindibles:
Primer género. Tiene el punto de
apoyo colocado entre la potencia y la
resistencia.
Volver al
índice
Potencia o fuerza que aplicamos Punto de apoyo Resistencia o fuerza que deseamos superar
Segundo género. Tiene la resistencia
colocada entre la potencia y el punto
de apoyo.
Tercer género. Tiene la potencia
colocada entre la resistencia y el pinto
de apoyo.
PALANCAS. Tipos 2
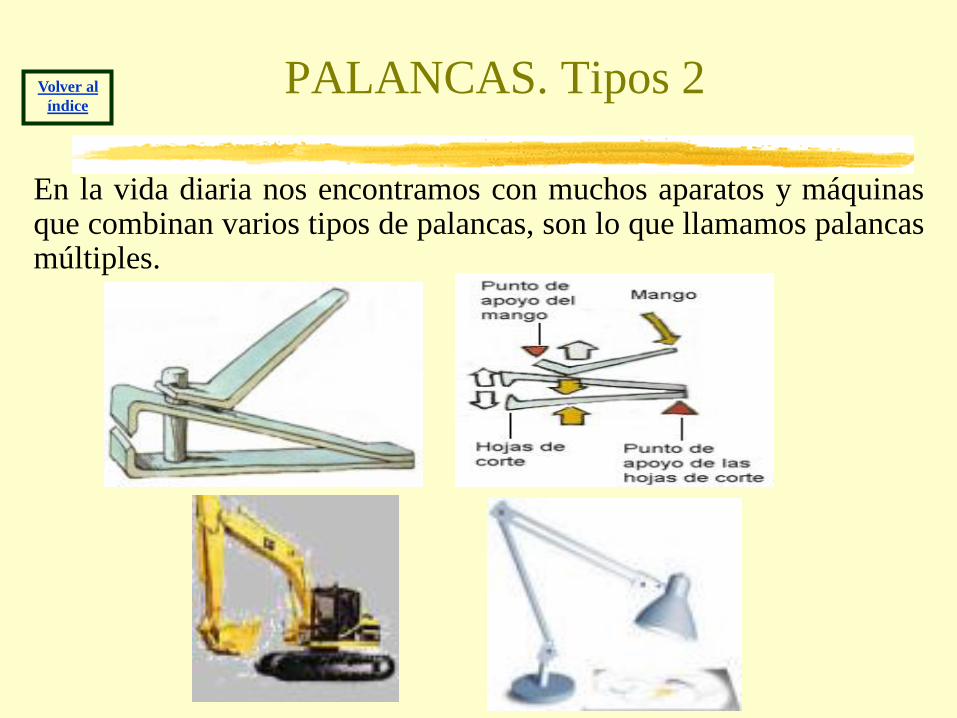
En la vida diaria nos encontramos con muchos aparatos y máquinasque combinan varios tipos de palancas, son lo que llamamos palancasmúltiples.
Volver al
índice
PALANCAS. La Ley de la palanca
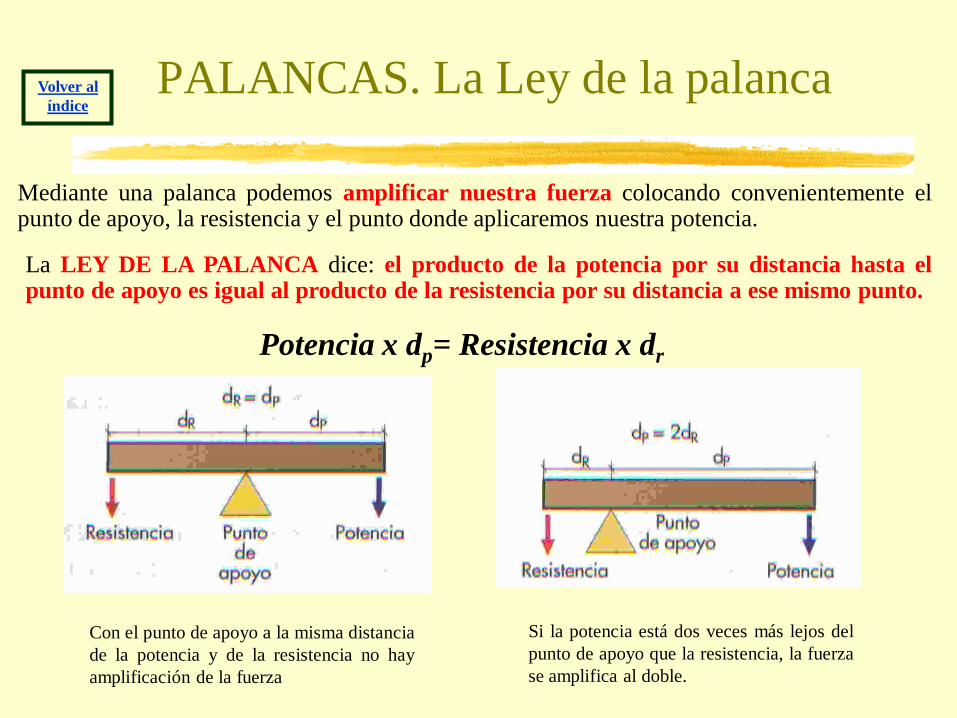
Mediante una palanca podemos amplificar nuestra fuerza colocando convenientemente elpunto de apoyo, la resistencia y el punto donde aplicaremos nuestra potencia.
Volver al
índice
La LEY DE LA PALANCA dice: el producto de la potencia por su distancia hasta elpunto de apoyo es igual al producto de la resistencia por su distancia a ese mismo punto.
Potencia x dp= Resistencia x dr
Con el punto de apoyo a la misma distancia
de la potencia y de la resistencia no hay
amplificación de la fuerza
Si la potencia está dos veces más lejos del
punto de apoyo que la resistencia, la fuerza
se amplifica al doble.
RUEDAS, LEVAS Y POLEAS.Volver al
índice
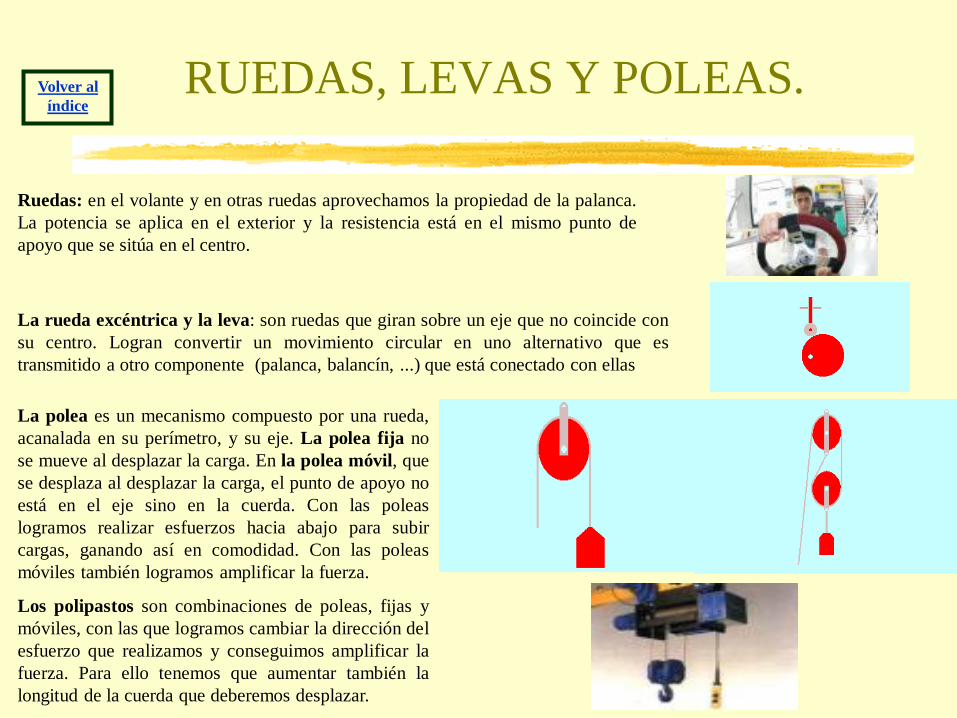
Ruedas: en el volante y en otras ruedas aprovechamos la propiedad de la palanca.
La potencia se aplica en el exterior y la resistencia está en el mismo punto de
apoyo que se sitúa en el centro.
La rueda excéntrica y la leva: son ruedas que giran sobre un eje que no coincide con
su centro. Logran convertir un movimiento circular en uno alternativo que es
transmitido a otro componente (palanca, balancín, ...) que está conectado con ellas
La polea es un mecanismo compuesto por una rueda,
acanalada en su perímetro, y su eje. La polea fija no
se mueve al desplazar la carga. En la polea móvil, que
se desplaza al desplazar la carga, el punto de apoyo no
está en el eje sino en la cuerda. Con las poleas
logramos realizar esfuerzos hacia abajo para subir
cargas, ganando así en comodidad. Con las poleas
móviles también logramos amplificar la fuerza.
Los polipastos son combinaciones de poleas, fijas y
móviles, con las que logramos cambiar la dirección del
esfuerzo que realizamos y conseguimos amplificar la
fuerza. Para ello tenemos que aumentar también la
longitud de la cuerda que deberemos desplazar.
SISTEMAS DE TRANSMISIÓN.Volver al
índice
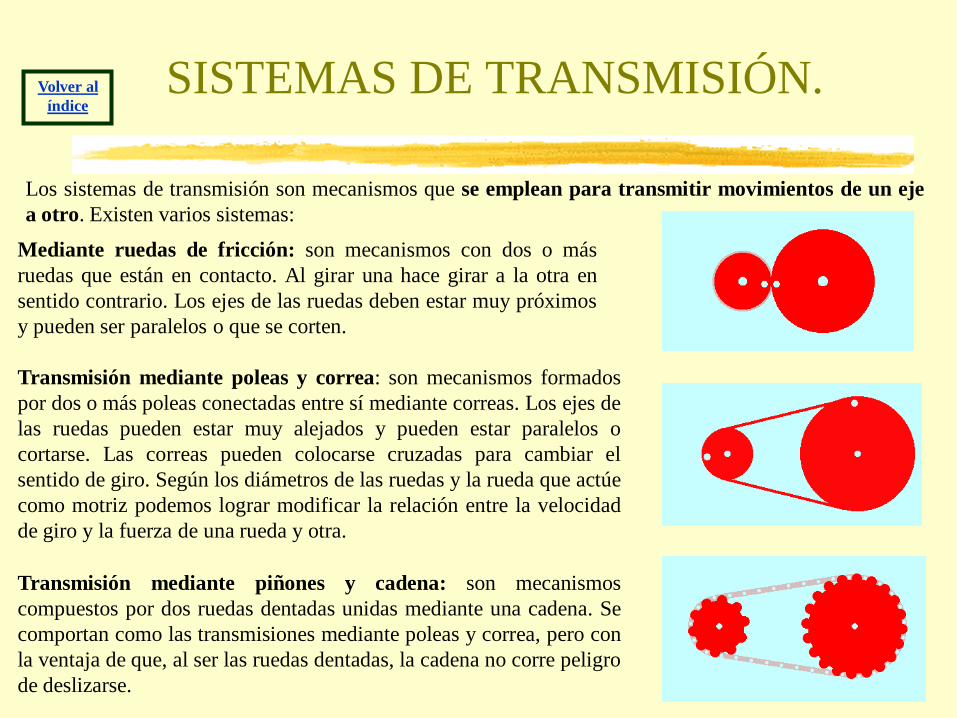
Mediante ruedas de fricción: son mecanismos con dos o más
ruedas que están en contacto. Al girar una hace girar a la otra en
sentido contrario. Los ejes de las ruedas deben estar muy próximos
y pueden ser paralelos o que se corten.
Transmisión mediante poleas y correa: son mecanismos formados
por dos o más poleas conectadas entre sí mediante correas. Los ejes de
las ruedas pueden estar muy alejados y pueden estar paralelos o
cortarse. Las correas pueden colocarse cruzadas para cambiar el
sentido de giro. Según los diámetros de las ruedas y la rueda que actúe
como motriz podemos lograr modificar la relación entre la velocidad
de giro y la fuerza de una rueda y otra.
Transmisión mediante piñones y cadena: son mecanismos
compuestos por dos ruedas dentadas unidas mediante una cadena. Se
comportan como las transmisiones mediante poleas y correa, pero con
la ventaja de que, al ser las ruedas dentadas, la cadena no corre peligro
de deslizarse.
Los sistemas de transmisión son mecanismos que se emplean para transmitir movimientos de un eje
a otro. Existen varios sistemas:
SISTEMAS DE TRANSMISIÓN.
EngranajesVolver al
índice
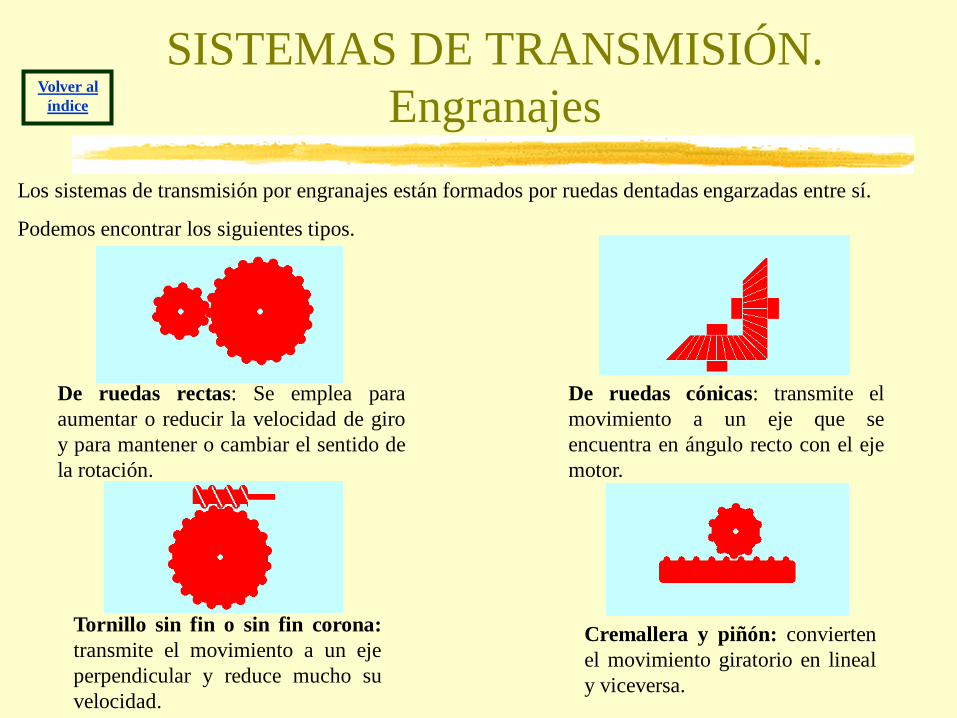
De ruedas rectas: Se emplea para
aumentar o reducir la velocidad de giro
y para mantener o cambiar el sentido de
la rotación.
De ruedas cónicas: transmite el
movimiento a un eje que se
encuentra en ángulo recto con el eje
motor.
Tornillo sin fin o sin fin corona:
transmite el movimiento a un eje
perpendicular y reduce mucho su
velocidad.
Los sistemas de transmisión por engranajes están formados por ruedas dentadas engarzadas entre sí.
Podemos encontrar los siguientes tipos.
Cremallera y piñón: convierten
el movimiento giratorio en lineal
y viceversa.
LA RELACIÓN DE TRANSMISIÓN
En todos los sistemas de transmisión, el aumento o disminución de fuerza y velocidad dependede la relación de transmisión.
Volver al
índice
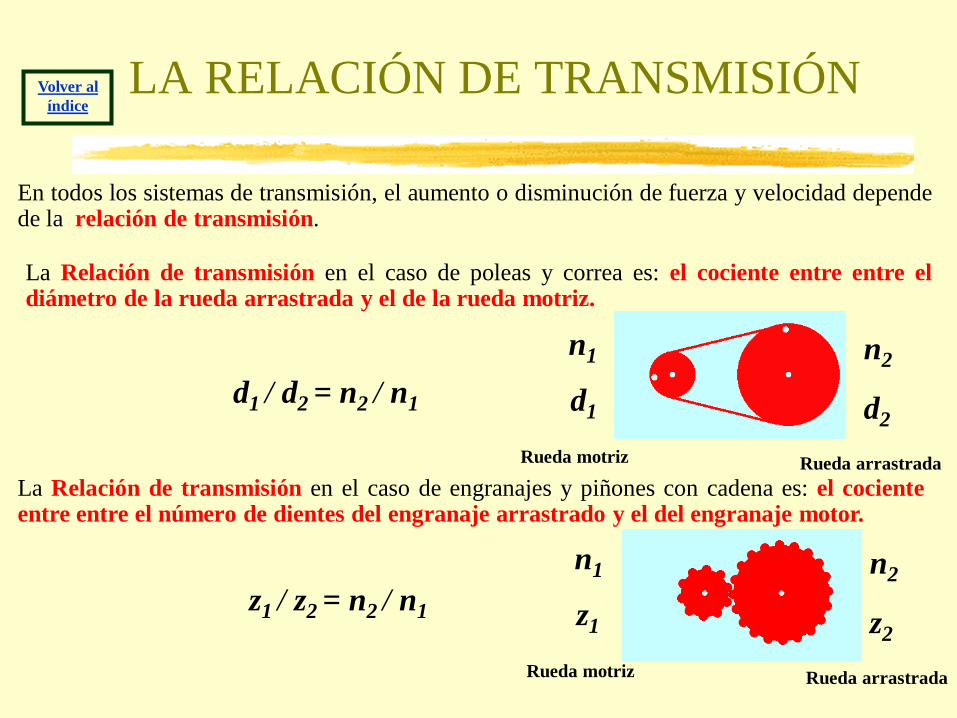
La Relación de transmisión en el caso de poleas y correa es: el cociente entre entre eldiámetro de la rueda arrastrada y el de la rueda motriz.
d1 / d2 = n2 / n1
z1 / z2 = n2 / n1
La Relación de transmisión en el caso de engranajes y piñones con cadena es: el cocienteentre entre el número de dientes del engranaje arrastrado y el del engranaje motor.
n1
d1
n2
d2
Rueda motriz Rueda arrastrada
n1
z1
n2
z2
Rueda motriz Rueda arrastrada
LA RELACIÓN DE TRANSMISIÓN.
El reductor de velocidad.
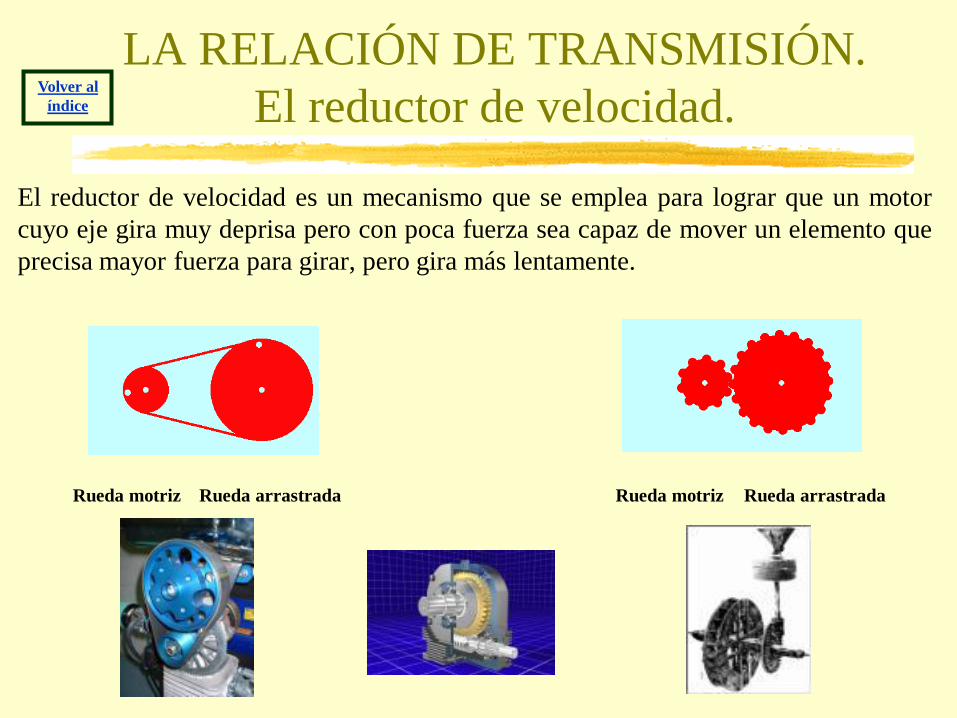
El reductor de velocidad es un mecanismo que se emplea para lograr que un motor
cuyo eje gira muy deprisa pero con poca fuerza sea capaz de mover un elemento que
precisa mayor fuerza para girar, pero gira más lentamente.
Volver al
índice
Rueda motriz Rueda arrastrada Rueda motriz Rueda arrastrada
MANIVELAS Y BIELAS. La manivela
La manivela es un mecanismo que sirve para hacer girar un eje con
menos esfuerzo. Cuanto más larga es la manivela menor es el
esfuerzo que deberemos realizar.
Volver al
índice
El cigüeñal es un conjunto de manivelas colocadas sobre un mismo eje.
Se usa cuando queremos dar movimiento alternativo a varios
elementos.
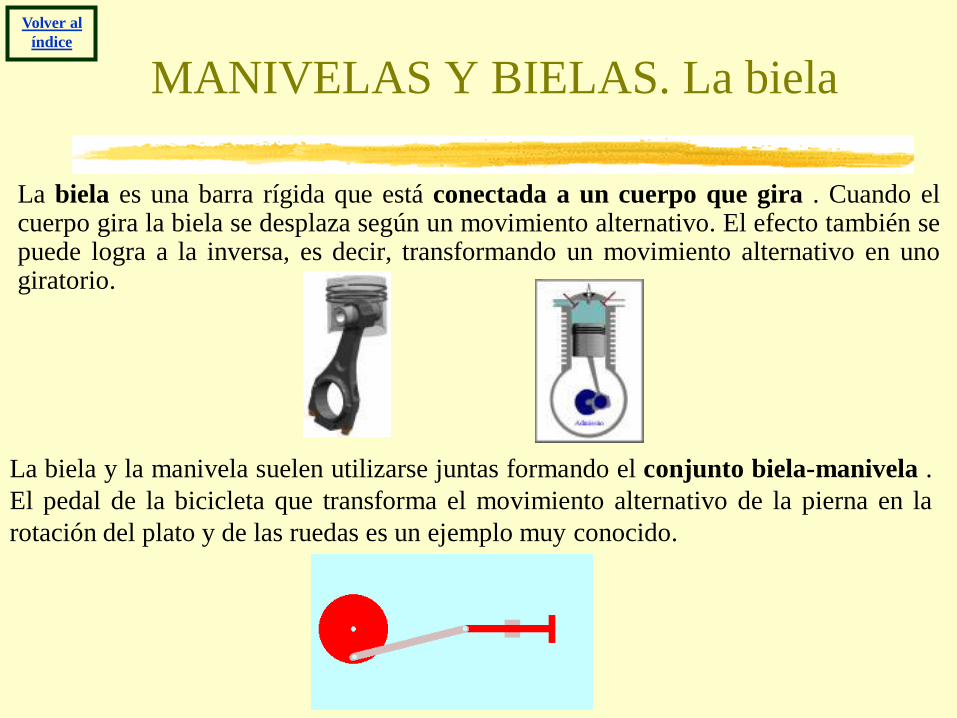
MANIVELAS Y BIELAS. La biela
La biela es una barra rígida que está conectada a un cuerpo que gira . Cuando elcuerpo gira la biela se desplaza según un movimiento alternativo. El efecto también sepuede logra a la inversa, es decir, transformando un movimiento alternativo en unogiratorio.
Volver al
índice
La biela y la manivela suelen utilizarse juntas formando el conjunto biela-manivela .
El pedal de la bicicleta que transforma el movimiento alternativo de la pierna en la
rotación del plato y de las ruedas es un ejemplo muy conocido.