Ecuaciones Diferenciales - Teoria de Ecuaciones Diferenciales no lineales
Leccion 11
Ecuaciones diferenciales de segundo orden
11.1. Introduccion
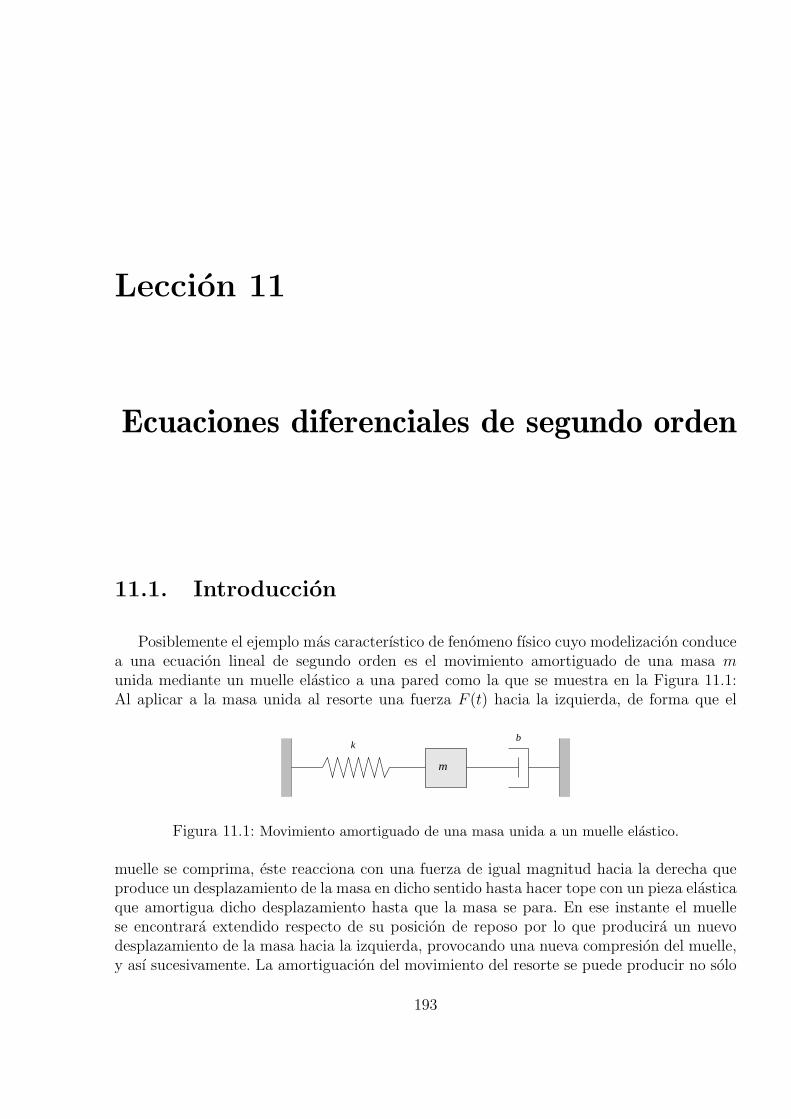
Posiblemente el ejemplo mas caracterıstico de fenomeno fısico cuyo modelizacion conducea una ecuacion lineal de segundo orden es el movimiento amortiguado de una masa munida mediante un muelle elastico a una pared como la que se muestra en la Figura 11.1:Al aplicar a la masa unida al resorte una fuerza F (t) hacia la izquierda, de forma que el
m
kb
Figura 11.1: Movimiento amortiguado de una masa unida a un muelle elastico.
muelle se comprima, este reacciona con una fuerza de igual magnitud hacia la derecha queproduce un desplazamiento de la masa en dicho sentido hasta hacer tope con un pieza elasticaque amortigua dicho desplazamiento hasta que la masa se para. En ese instante el muellese encontrara extendido respecto de su posicion de reposo por lo que producira un nuevodesplazamiento de la masa hacia la izquierda, provocando una nueva compresion del muelle,y ası sucesivamente. La amortiguacion del movimiento del resorte se puede producir no solo
193

194 Ecuaciones diferenciales de segundo orden
por contacto con otra pieza elastica sino tambien por rozamiento con el medio, o cualquierotra causa.
Suponiendo que la fuerza de amortiguacion es proporcional a la velocidad: bx′(t) y que k,una constante, mide la rigidez del muelle (que depende del material del que este hecho), lasegunda Ley de Newton conduce a la siguiente ecuacion que sirve de modelo para el estudiode este fenomeno fısico:
mx′′(t) + bx′(t) + kx(t) = F (t) (11.1)
Esta ecuacion junto a las condiciones iniciales: x(0) = x0 (posicion de la masa en elmomento inicial) y x′(0) = v0 (velocidad de la masa en el momento inicial), que podrıanser ambas cero si la masa esta en reposo en el momento inicial, forman un Problema deCondiciones Iniciales que lo escribiremos ası:
{mx′′(t) + bx′(t) + kx(t) = F (t)x(0) = x0, x′(0) = v0
El objetivo de este capıtulo es estudiar este tipo de ecuaciones diferenciales de segundoorden. En particular la ecuacion (11.1) es una ecuacion diferencial de segundo orden linealno homogenea y de coeficientes constantes. Pero antes de llegar a estas ecuaciones analiza-remos otras ecuaciones de segundo orden que pueden reducirse, mediante simples cambiosde varaibles, a ecuaciones de primer orden.
11.2. Ecuaciones de Segundo Orden
Vimos en la primera Leccion que las ecuaciones de orden n, escritas en forma normal sonlas del siguiente tipo:
x(n) = f(t, x, x′, . . . , x(n−1)).
Solo estudiaremos aquı ecuaciones de segundo orden:
x′′ = f(t, x, x′) (11.2)
Tal y como hemos dicho en la introduccion, entre todas ellas la mas famosa, sin duda, es lasegunda ley del movimiento de Newton:
mx′′(t) = F (t, x, x′)
que rige el movimiento de una partıcula de masa m que se mueve por la accion de una fuerzaF . En esta ecuacion la fuerza depende del tiempo t, de la posicion x(t) de la partıcula y de la

11.2 Ecuaciones de Segundo Orden 195
velocidad a la que se mueve x′(t). Si, ademas, a la ecuacion (11.2) se le imponen condicionesiniciales sobre x(t) de la forma
x(t0) = x0, x′(t0) = x′0
entonces tenemos un Problema de Condiciones iniciales{
x′′ = F (t, x, x′)x(t0) = x0, x′(t0) = x′0.
Las ecuaciones de segundo orden son muy difıciles de resolver analıticamente, salvo encasos muy excepcionales. Claro que esto no deberıa sorprendernos despues de nuestra expe-riencia con las ecuaciones de primer orden, donde vimos que solo unas poquitas son realmentemanejables. En realidad nuestro estudio se referira exclusivamente a ecuaciones lineales. Perohay unas pocas ecuaciones de segundo orden, que no son lineales, y que se pueden reducir aecuaciones de primer orden: las ecuaciones en las que no aparece una de las dos varaibles.
11.2.1. Ecuaciones en las que no aparece la variable dependiente
Consideremos ecuaciones de segundo orden de la forma
x′′ = f(t, x′)
donde la variable dependiente x no aparece en la ecuacion. Por ejemplo
2tx′′ − x′ +1
x′= 0 (t 6= 0). (11.3)
En este caso la sustitucion u = x′ nos permite reducir la ecuacion original a otra de primerorden. En efecto, si u = x′ entonces u′ = x′′ de modo que x′′ = f(t, x′) se reduce a u′ = f(t, u).Basta integrar esta ecuacion para obtener la solucion general u = u(t). Como x′ = u,obtenemos la solucion de la ecuacion original por integracion x(t) =
∫u(t) dt + C.
En el ejemplo anterior, x′ = u y x′′ = u′. Sustituyendo en la ecuacion:
2tu′ − u +1
u= 0.
Como t 6= 0 podemos escribir
u′ =u2 − 1
2ut.
Esta ecuacion tiene dos soluciones de equilibrio u(t) = 1 y u(t) = −1. Una vez consideradas,podemos separar las variables:
2u
u2 − 1du =
1
tdt.

196 Ecuaciones diferenciales de segundo orden
Integrando obtenemos
u(t)2 = 1 + c1t, c1 > 0.
Ahora deshacemos el cambio u = x′. Para la solucion general
x(t) =
∫±√1 + c1t + c2 = ± 2
3c1
(1 + c1x)3/2 + c2.
Y para las soluciones de equilibrio
x(t) =
∫±1 dt + c2 = ±t + c2.
Obtenemos, ası, todas las soluciones de la ecuacion (11.3).
11.2.2. Ecuaciones en las que no aparece la variable independiente
Consideremos ahora ecuaciones de la forma:
x′′ = f(x, x′),
en las que no aparece la variable independiente t. Por ejemplo
2xx′′ = 1 + (x′)2. (11.4)
Para resolver estas ecuaciones hacemos uso de la misma sustitucion que en el caso anterior:u = x′. Como no aparece la variable t en la ecuacion, debemos pensar en u como una funcionde x; claro que, como x es funcion de t, u tambien es funcion de t. Viendo u como funcionde x podemos aplicar la regla de la cadena para calcular x′′:
d2x
dt=
du
dt=
du
dx
dx
dt.
Comodx
dt= x′ = u tenemos que
x′′ =d2x
dt= u
du
dx,
con lo que la ecuacion x′′ = f(x, x′) se convierte en
udu
dx= f(x, u),

11.2 Ecuaciones de Segundo Orden 197
que es de primer orden en la variable x. Se resuelve como si x fuera la variable independiente.Esto nos dara todas las soluciones u = u(x) de dicha ecuacion. Ahora, tenemos que resolverotra nueva ecuacion diferencial x′ = u(x), que es en variables separables.
Para la ecuacion (11.4) hacemos el cambio u = x′. Ası x′′ = udu
dxy u = x′:
2xudu
dx= 1 + u2.
Esta ecuacion es variable separables pero no tiene soluciones de equilibrio. Separamos lasvariables:
2u
1 + u2du =
1
xdx.
Integrando
u(x)2 = c1x− 1, c1 6= 0.
Ahora debemos deshacer el cambio x′ = u(x). Es decir
x′ = ±√c1x− 1.
Se trata de una nueva ecuacion en variables separables. Separandolas
1√c1x− 1
dx = ± dt.
Integrando2
c1
(c1x− 1)1/2 = ±t + c2.
Elevando al cuadrado
4(c1x− 1) = c21(t + c2)
2,
o bien
x(t) =1
c1
+c1
4(t + c2)
2,
donde c1 es una constante no nula cualquiera y c2 es otra constante arbitraria. Esta es lasolucion general de la ecuacion.
11.2.3. Ecuaciones lineales de segundo orden
Recordemos que las ecuaciones lineales de segundo orden tienen la siguiente forma:
x′′ + p(t)x′ + q(t)x = r(t). (11.5)

198 Ecuaciones diferenciales de segundo orden
Recordemos tambien que en la Leccion 8 vimos que la sustitucion x1 = x y x2 = x′ nospermite pasar al sistema lineal de primer orden y dimension equivalente:
x′ =(
0 1−q(t) −p(t)
)x +
(0
r(t)
), (11.6)
Esto significa que x = x(t) es solucion de la ecuacion (11.5) si y solo si el vector
x(t) =
(x1(t)x2(t)
)=
(x(t)x′(t)
)
es solucion del sistema (11.6).
Por lo tanto, todo lo que se puede decir de las soluciones de las ecuaciones lineales desegundo orden se deduce de las propiedades de las soluciones de los sistemas lineales de primerorden y dimension 2. Lo que exponemos a continuacion es un resumen de estas propiedades.
Comenzamos con el teorema de existencia y unicidad para el problema de condicionesiniciales:
{x′′ + p(t)x′ + q(t)x = 0x(t0) = x0, x′(t0) = x′0
(11.7)
El teorema es el siguiente que, como es habitual, damos sin demostracion:
Teorema 11.1 .- Supongamos que las funciones p(t) y q(t) son continuas en el intervaloabierto (a, b). Entonces existe una y solo una funcion x(t) que es solucion del problema decondiciones iniciales (11.7) en el intervalo (a, b); es decir, que satiface la ecuacion (11.5) enel intervalo (a, b) y tal que x(t0) = x0 y x′(t0) = x′0. En particular, la unica solucion de (11.5)que cumple x(t0) = 0 y x′(t0) = 0 en algun tiempo t = t0 debe ser la funcion identicamentecero: x(t) = 0 para t ∈ (a, b).
Como siempre, este teorema tiene una gran importancia teorica y practica. Por el mo-mento prestamos atencion a la ultima parte. Esta es, en realidad, una consecuencia de launicidad: como la funcion x(t) = 0 siempre es una solucion de la ecuacion homogenea (11.5)y cumple que x(t0) = 0 y x′(t0) = 0 para todo t0, y como solo hay una solucion de la ecuacionque cumple estas condiciones iniciales, esta debe ser la funcion x(t) = 0.
Por otra parte, dos soluciones x1(t) y x2(t) de la ecuacion (11.5) se dice que forman un sis-tema fundamental de soluciones de la ecuacion, si las correspondientes funciones vectoriales,solucion del sistema (11.6)
x1(t) =
(x1(t)x′1(t)
)y x2(t) =
(x2(t)x′2(t)
)

11.2 Ecuaciones de Segundo Orden 199
forman un sistema fundamental de soluciones de dicho sistema equivalente. Es decir, si
det
(x1(t) x2(t)x′1(t) x′2(t)
)6= 0
para algun t ∈ (a, b) del intervalo de definicion de la ecuacion (11.5) (i.e., en el que lasfunciones p(t) y q(t) son continuas). Al determinante
W (x1, x2)(t) = det
(x1(t) x2(t)x′1(t) x′2(t)
)
se le llama Wronskiano de x1(t) y x2(t) en t.
Definicion 11.2 .- Dos funciones x1(t) y x2(t) defindas en el intervalo (a, b) se dice queson linealmente dependientes en (a, b) si existe una constante c tal que x1(t) = cx2(t) ox2(t) = cx1(t). Dos funciones que no son linealmente dependientes en (a, b) se dice que sonlinealmente independientes.
Es muy importante observar que la dependencia e independencia lineal dependen funda-mentalmente del intervalo (a, b) que se este considerando. Por ejemplo, las funciones x1(t) = ty x2(t) = |t| son linealmente dependientes en el intervalo [0, 1] y son linealmente indepen-dientes en el intervalo [−1, 1]. En efecto,x2(t) = t = x1(t) en el intervalo [0, 1], por lo queexiste una constante c = 1 tal que x2(t) = cx1(t). Pero en el intervalo [−1, 1] tal constante noexiste, porque si fuera x2(t) = cx1(t) para todo t ∈ [−1, 1] (la misma constante c para todoslos valores de t ∈ [−1, 1]), entonces x2(−1) = cx1(−1). Como x2(−1) = 1 y x1(−1) = −1deberıa ser c = −1. Y como x2(1) = x1(1) = 1 tendrıamos que c = 1. Como tiene que ser lamisma c, concluirıamos que 1 = −1, que es absurdo.
Si x1(t) y x2(t) son linealmente dependientes en (a, b) entonces, digamos, x2(t) = cx1(t)para todo t ∈ (a, b). Derivando, x′2(t) = cx′1(t), y por lo tanto
x2(t) =
(x2(t)x′2(t)
)= c
(x1(t)x′1(t)
)= cx1(t).
Es decir, x1(t) y x2(t) tambien son linealmente dependientes en (a, b). Esto implica quedet W (x1, x2)(t) = 0 para todo t ∈ (a, b). Y recıprocamente, si det W (x1, x2)(t) = 0 paratodo t ∈ (a, b), entonces x1(t) y x2(t) son linealmente dependientes en (a, b) y en consecuenciasus primeras componentes, x1(t) y x2(t), cumplen que x1(t) = cx2(t) o x2(t) = cx1(t) paratodo t ∈ (a, b). Ası pues tenemos el sisguiente
Teorema 11.3 .- Dos soluciones x1(t) y x2(t) de la ecuacion (11.5) son linealmente in-dependientes en el intervalo (a, b) si y solo si su Wronskiano es distinto de cero en dichointervalo. Ası, dos soluciones forman un sistema fundamental de soluciones de (11.5) en(a, b) si y solo si son linealmente independientes en este intervalo.

200 Ecuaciones diferenciales de segundo orden
Observamos finalmente que la solucion x(t) = 0 de la ecuacion (11.5) no puede estar nuncaen un conjunto fundamental de soluciones de la ecuacion diferencial porque esta funcion eslinealmente dependiente de cualquier otra funcion en cualquier intervalo. En efecto, si y(t)es cualquier otra funcion 0 = x(t) = 0y(t) para todo t.
En conclusion
Teorema 11.4 .- Dada la ecuacion diferencial lineal homogenea de segundo orden
x′′ + p(t)x′ + q(t)x = 0
con p y q continuas en el intervalo (a, b), la funcion x(t) es solucion de esta ecuacion si ysolo si existen constantes c1 y c2 tales que para todo t ∈ (a, b)
x(t) = c1x1(t) + c2x2(t)
siendo x1(t) y x2(t) soluciones de la ecuacion linealmente independientes en (a, b).
En otras palabras, la solucion general de la ecuacion (11.5) es
x(t) = c1x1(t) + c2x2(t)
siendo x1(t) y x2(t) funciones linealmente independientes en (a, b) y c1 y c2 constantes arbi-trarias.
Consideremos ahora las ecuaciones lineales de segundo orden no homogeneas:
x′′ + p(t)x′ + q(t)x = r(t). (11.8)
donde p(t), q(t) y r(t) son funciones continuas en un intervalo abierto (a, b). Al igual quepara ecuaciones o sistemas de primer orden, la solucion general de estos sistemas es sumade una solucion particular y de la solucion general de la ecuacion homogenea. Damos esteresultado en forma de teorema sin demostracion. Esta es identica a la que mostramos parasistemas.
Teorema 11.5 .- Sean xh(t) de la ecuacion homogenea x′′ + p(t)x′ + q(t)x = 0 y xp(t) unasolucion particular de la ecuacion no homogenea (11.8). Entonces la solucion general, x(t),de la ecuacion (11.8) debe ser de la forma:
x(t) = xh(t) + xp(t)
El problema consiste en como encontrar soluciones generales de la ecuacion lineal ho-mogenea y soluciones particulares de la no homogenea. En la proxima seccion estudiamosambos problemas para ecuaciones cuyos coeficientes son constantes.

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 201
11.3. Ecuaciones Lineales de Segundo Orden Con Coe-
ficientes Constantes
Las ecuaciones lineales de segundo orden con coeficientes constantes son de la forma
x′′ + px′ + qx = r(t) (11.9)
donde p y q son constantes y r(t) es una funcion que depende solo de t y que supondremosque es continua en un intervalo (a, b). Para resolver estas ecuaciones aprovechamos lo queya conocemos de los sistemas de ecuaciones.
Tal y como hemos dicho mas arriba la sustitucion:
x1(t) = x(t) x2(t) = x′(t)
nos permite obtener el sistema equivalente de primer orden y dimension 2:{
x′1 = x2
x′2 = −qx1 − px2 + r(t)(11.10)
que ya sabemos resolver.Debe observarse, sin embargo, que estamos interesados en las fun-ciones x(t) que son solucion de la ecuacion (11.9); es decir, de las dos componentes que nosproporciona la solucion del sistema (11.10) solo estamos interesados en la primera de ellas.
11.3.1. Caso homogeneo
Consideramos en primer lugar el caso homogeneo:
x′′ + px′ + qx = 0. (11.11)
y su correspondiente sistema {x′1 = x2
x′2 = −qx1 − px2(11.12)
cuya matriz de coeficientes es
A =
(0 1−q −p
).
Los valores propios del sistema (11.12) son las raıces del polinomio caracterıstico de estamatriz:
det
(λ −1q λ + p
)= λ2 + pλ + q
Ası pues, el polinomio caracterıstico de la matriz del sistema se obtiene directamente dela ecuacion homogenea: en efecto, p(λ) = λ2 + pλ + q es el polinomio que se obtiene al

202 Ecuaciones diferenciales de segundo orden
sustituir x por λ0 = 1, x′ por λ1 y x′′ por λ2 en la ecuacion diferencial dada. Al polinomiop(λ) = λ2 + pλ + q se le llama polinomio caracterıstico de la ecuacion (11.9) o (11.11).
Por otra parte, si λ1, λ2 son las raıces de p(λ) (que pueden ser complejas o reales, yen este caso iguales o distintas) debemos calcular vectores propios de A asociados a estosvalores propios:
(λ1I2 − A)v =
(λ1 −1q λ1 + p
)(v1
v2
)=
(00
)
De aquı sacamos que v2 = λ1v1. Escogemos v1 = 1 y entonces
v1 =
(1λ1
)
es un vector propio asociado a λ1. Si λ1 6= λ2 entonces obtendrıamos de la misma forma que
v2 =
(1λ2
)
es un vector propio asociado a λ2. Si λ1 y λ2 son numeros reales entonces un sistema funda-mental de soluciones del sistema (11.12) serıa
x1(t) =
(eλ1t
λ1eλ1t
)x2(t) =
(eλ2t
λ2eλ2t
)
y la solucion general del sistema (11.12) es :
x(t) =
(c1e
λ1t + c2eλ2t
c1λ1eλ1t + c2λ2e
λ2t
)
Notese que la segunda componente de x(t) es, en efecto, la derivada de la primera.Recordemos ahora que solo estamos interesados en la primera componente x1(t) porque estaes la funcion x(t) que es solucion de la ecuacion (11.11). Ası
x(t) = c1eλ1t + c2e
λ2t
es la solucion general de la ecuacion (11.11) si las raıces del polinomio caracterıstico de laecuacion son reales y distintas.
Debe notarse que eλ1t y eλ2t son funciones linealmente independientes, por lo que estamosen las condiciones del Teorema 11.4.
Si λ1 es una raız compleja, digamos λ1 = a + bi, entonces λ2 = a − bi y el sistema

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 203
fundamental de soluciones serıa (recordemos que v1 =
(1λ1
)=
(1a
)+ i
(0b
)):
x1(t) = Re
(eat(cos bt + i sen bt)
((1a
)+ i
(0b
)))
x2(t) = Im
(eat(cos bt + i sen bt)
((1a
)+ i
(0b
)))
Es decir:
x1(t) =
(eat cos bt
eat(a cos bt− b sen bt)
)x2(t) =
(eat sen bt
eat(b cos bt + a sen bt)
)
Notese de nuevo que las segundas componentes de estas soluciones son las derivadas de lasprimeras componentes. Ahora, como la solucion general de la ecuacion (11.11) es la primeracomponente de la solucion general del sistema (11.12), tenemos que
x(t) = c1eat cos bt + c2e
at sen bt
es la solucion general de la ecuacion (11.11) cuando las raıces del polinomio caracterısticoson a + bi y a− bi. Observese otra vez que las funciones eat cos bt y eat sen bt son linealmenteindependientes en todo R.
Estudiamos finalmente el caso en que λ1 = λ2. Es decir, el caso en que hay un unico valorpropio cuya multiplicidad algebraica es 2. En este caso p(λ) = (λ− λ1)
2 = λ2 − 2λ1λ + λ21.
Es decir, p = −2λ1 y q = λ21. Y para hallar los vectores propios asociados debemos resolver
el sistema: (λ1 −1q λ1 + p
)(v1
v2
)=
(00
),
que en este caso queda (λ1 −1λ2
1 −λ1
) (v1
v2
)=
(00
).
Ahora bien, la matriz de este sistema tiene siempre rango 1 porque el elemento en la posicion(1, 2) es siempre −1. Por lo tanto, la multiplicidad geometrica del valor propio es siempre1. Por lo tanto debe haber un vector propio y un vector propio generalizado. El primero deellos debe ser solucion del sistema caracterıstico, que ya hemos visto que es:
v1 =
(v1
λ1v1
)
Para calcular un vector propio generalizado debemos resolver el sistema (λ1I2 − A)2v = 0.Pero
(λ1I2 − A)2 =
(λ1 −1λ2
1 −λ1
)(λ1 −1λ2
1 −λ1
)=
(0 00 0
).

204 Ecuaciones diferenciales de segundo orden
Ası pues, cualquier vector de R2 que no sea linealmente dependientes de v1 nos sirve comovector propio generalizado. Por ejemplo:
v2 =
(01
).
Un sistema fundamental de soluciones en este caso es:
x1(t) = eλ1tv1 =
(eλ1t
λ1eλ1t
)x2(t) = eλ1t(I2 + (A− λ1I2)t)v2 =
(teλ1t
(λ1t + 1))eλ1t
)
Una vez mas, solo estamos interesados en la primera componente de la solucion general delsistema, que en este caso es:
x(t) = c1eλ1t + c2te
λ1t
Esta es entonces la solucion general de la ecuacion (11.11) cuando las raıces del polinomiocaracterıstico son iguales. Debe notarse, de nuevo, que las funciones eλ1t y (1 + t)eλ1t sonlinealmente independientes en todo R.
Ejemplo 11.6 .- Sea ω un numero real
1. - Calculese la solucion general de la ecuacion
x′′ + ω2x = 0
siendo ω 6= 0.
2. - Calculese la solucion general de la ecuacion
x′′ − 2ωx′ + ω2x = 0
Solucion.-
1. - El polinomio caracterıstico de la ecuacion es p(λ) = λ2 +ω2, cuyas raıces son λ1 = ωiy λ2 = −ωi. Como ω 6= 0 se trata de dos raıces complejas conjugadas por lo que lasolucion general es:
x(t) = c1e0t cos ωt + c2e
0t sen ωt = c1 cos ωt + c2 sen ωt.
2. - El polinomio caracterıstico de la ecuacion es p(λ) = λ2 − 2ω + ω2, cuyas raıces sonλ1 = λ2 = ω. Por lo tanto la solucion general de la ecuacion es:
x(t) = c1eωt + c2(1 + t)eωt
En particular si ω = 0 la solucion serıa
x(t) = c1t + c2

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 205
11.3.2. Caso no homogeneo
Estudiamos ahora el caso no homogeneo:
x′′ + px′ + qx = r(t) (11.13)
El sistema asociado a esta ecuacion mediante la sustitucion x1(t) = x(t), x2(t) = x′(t) es:
{x′1 = x2
x′2 = −qx1 − px2 + r(t)(11.14)
que es un sistema lineal no homogeneo. Ya sabemos que la solucion general de este sistemaes
x(t) = xp(t) + xh(t)
donde xh(t) es la solucion general del sistema homogeneo (ya calculada mas arriba) y xp(t)es una solucion particular del no homogeneo. Debemos notar de nuevo que solo estamosinteresados en la primera componente del vector x(t); y por lo tanto solo nos interesa laprimera componente del vector xp(t), que en realidad es una solucion particular de la ecuacionno homogenea (11.13).
Ya sabemos como calcular la solucion general de la ecuacion homogenea. Nos centraremosen la busqueda de una solucion particular de la no homogenea. Tenemos dos metodos anuestra disposicion. El primero de ellos (el metodo de variacion de las constantes) consiste enhallar la solucion particular del sistema no homogeneo equivalente y quedarnos con la primeracomponente. El segundo (el metodo de los coeficientes indeterminados) es util cuando eltermino independiente es de una forma determinada, pero muy frecuente en las aplicaciones.
Metodo de variacion de las constantes
Recordemos que este metodo, para sistemas lineales de primer orden y de dimension 2,consiste en buscar una solucion particular de la forma
xp(t) = c1(t)x1(t) + c2(t)x2(t)
siendo {x1(t),x2(t)} un sistema fundamental de soluciones de (11.14). Ademas las funcionesc1(t) y c2(t) se hayan a partir del sistema
X(t)c′(t) = b(t),
donde
X(t) =(x1(t) x2(t)
), c(t) =
(c1(t)c2(t)
)y b(t) =
(0
r(t)
).

206 Ecuaciones diferenciales de segundo orden
Ahora bien, si {x1(t), x2(t)} es un sistema fundamental de soluciones de la ecuacion (11.13)entonces
x1(t) =
(x1(t)x′1(t)
), x2(t) =
(x2(t)x′2(t)
).
Ası pues, el sistema X(t)c′(t) = b(t) se escribe explıcitamente de la siguiente forma:
{c′1(t)x1(t) + c′2(t)x2(t) = 0c′1(t)x
′1(t) + c′2(t)x
′2(t) = r(t)
que se puede resolver por la regla de Cramer:
c′1(t) =
det
(0 x2(t)
r(t) x′2(t)
)
det
(x1(t) x2(t)x′1(t) x′2(t)
) , c′2(t) =
det
(x1(t) 0x′1(t) r(t)
)
det
(x1(t) x2(t)x′1(t) x′2(t)
)
Ahora bien, det
(x1(t) x2(t)x′1(t) x′2(t)
)= W (x1, x2)(t) es el Wronskiano del sistema fundamental de
soluciones de la ecuacion homogenea x′′ + px′ + qx = 0, det
(0 x2(t)
r(t) x′2(t)
)= −r(t)x2(t) y
det
(x1(t) 0x′1(t) r(t)
)= r(t)x1(t), de modo que
c1(t) =
∫ −r(t)x2(t)
W (x1, x2)(t)dt, y c2(t) =
∫r(t)x1(t)
W (x1, x2)(t)dt
Ejemplo 11.7 .- Hallar la solucion general de la ecuacion
x′′ + x = tg t
Solucion.- La ecuacion caracterıstica es λ2+1 = 0 que tiene dos raıdes λ1 = i y λ2 = −i.Un sistema fundamental de soluciones es x1(t) = cos t y x2(t) = sen t. La solucion generalde la ecuacion homogenea
xh(t) = c1 cos t + c2 sen t.
Una solucion particular de la no homogenea es xp(t) = c1(t) cos t + c2(t) sen t, donde
c1(t) =
∫ −r(t)x2(t)
W (x1, x2)(t)dt, y c2(t) =
∫r(t)x1(t)
W (x1, x2)(t)dt.
Ahora bien
W (x1, x2)(t) =
(cos t sen t− sen t cos t
)= 1.

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 207
Ası
c1(t) =
∫ − tg t sen t
1dt =
∫ − sen2 t
cos tdt =
∫cos2 t− 1
cos tdt =
=
∫cos t dt−
∫sec t dt = sen t− ln | sec t + tg t|.
Y
c2(t) =
∫tg t cos t
1dt =
∫sen t dt = − cos t.
Por lo tanto una solucion particular de la ecuacion no homogenea sera
xp(t) = (sen t− ln | sec t + tg t|) cos t− cos t sen t = − ln | sec t + tg t| cos t.
Y la solucion general de la ecuacion no homogenea es:
x(t) = xh(t) + xp(t) = c1 cos t + c2 sen t− ln | sec t + tg t| cos t
Aunque solo de interes teorico, hay una forma explıcita de expresar los valores de c1(t) yc2(t) en funcion de los valores propios de la ecuacion homogenea: Deberemos distinguir lostres casos posibles segun que las raıces sean iguales o distintas, y en este caso segun seanreales o complejas
1. λ1 y λ2 reales y distintos.- En este caso la solucion general del sistema homogeneo es:
xh =
(c1e
λ1t + c2eλ2t
c1λ1eλ1t + c2λ2e
λ2t
)
Para hallar una solucion particular del sistema no homogeneo debemos resolver elsistema {
c′1(t)eλ1t + c′2(t)e
λ2t = 0c′1(t)λ1e
λ1t + c′2(t)λ2eλ2t = r(t)
De la primera ecuacion tenemos que c′1(t) = −e(λ2−λ1)tc′2(t) que sustituıda en la segundaecuacion y despejando obtenemos
c′2(t) =1
λ2 − λ1
e−λ2tr(t).
Por lo tanto:
c′1(t) =1
λ1 − λ2
e−λ1tr(t).
Ası pues:
c1(t) =1
λ1 − λ2
∫e−λ1tr(t) dt
c2(t) =1
λ2 − λ1
∫e−λ2tr(t) dt

208 Ecuaciones diferenciales de segundo orden
De esta forma la primera componente de la solucion particular del sistema no ho-mogeneo es:
xp(t) = eλ1tc1(t) + eλ2tc2(t) =
=1
λ1 − λ2
(∫eλ1(t−s)r(s) ds−
∫eλ2(t−s)r(s) ds
)
Y la solucion general de la ecuacion no homogenea:
x(t) = c1eλ1t + c2e
λ2t +1
λ1 − λ2
(∫eλ1(t−s)r(s) ds−
∫eλ2(t−s)r(s) ds
)
2. λ1 y λ2 complejas conjugadas.- Procedemos en este caso como en el anterior. La so-lucion general del sistema homogeneo es:
xh(t) =
(c1e
at cos bt + c2eat sen bt
c1eat(a cos bt− b sen bt) + c2e
at(a sen bt + b cos bt)
)
Debemos resolver el sistema:{
c′1(t)eat cos bt + c′2(t)e
at sen bt = 0c′1(t)e
at(a cos bt− b sen bt) + c′2(t)eat(a sen bt + b cos bt) = r(t)
Calculos similares a los del caso anterior producen:
c′1(t) = −1
be−at sen btr(t) ⇒ a1(t) = −1
b
∫e−as sen bsr(s) ds
c′2(t) =1
be−at cos btr(t) ⇒ a1(t) =
1
b
∫e−as cos bsr(s) ds
Ası pues la primera componente de la solucion particular serıa:
xp(t) = −1
beat cos bt
∫e−as sen bsr(s) ds +
1
beat sen bt
∫e−as cos bsr(s) ds =
=1
b
∫ea(t−s)[− cos bt sen bs + sen bt cos bs]r(s) ds =
=1
b
∫ea(t−s) sen b(t− s)r(s) ds
Y la solucion general de la ecuacion no homogenea sera:
x(t) = c1eat cos bt + c2e
at sen bt +1
b
∫ea(t−s) sen b(t− s)r(s) ds

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 209
3. λ1 = λ2.- En este caso la solucion general del sistema homogeneo es:
xh(t) =
(eλ1t(c1 + c2t)
eλ1t[λ1(c1 + c2t) + c2]
)
por lo que el sistema a resolver es:{
eλ1t(c′1(t) + c′2(t)t) = 0λ1e
λ1tλ1(c′1(t) + c′2(t)t) + c′2(t)] = r(t)
De aquı deducimos que c′1(t) = −tc′2(t) y como c′1(t)+ c′2(t)t = 0, c′2(t) = e−λ1tr(t). Porlo tanto
c1(t) = −∫
se−λ1sr(s) ds
c2(t) =
∫e−λ1sr(s) ds
y una solucion particular de la ecuacion no homogenea sera:
yp(t) = eλ1t
(t
∫e−λ1sr(s) ds−
∫se−λ1sr(s) ds
)=
=
∫(t− s)e)λ1(t−s)r(s) ds
En conclusion, la solucion general de la ecuacion no homogenea es:
x(t) = (a1 + a2t)eλ1t +
∫(t− s)eλ1(t−s)r(s) ds
Metodo de los Coeficientes Indeterminados
El metodo de variacion de las constantes es de general aplicacion cualquiera que seael termino independiente r(t). Hay, sin embargo, terminos independientes para los que sepueden encontrar soluciones particulares de la ecuacion homogenea especialmente simples.Por ejemplo, para la ecuacion
x′′ + 3x′ + 2x = 3t + 1
se puede observar que la solucion bien podrıa ser un polinomio porque las derivadas sucesivasde un polinomio son polinomios (cada vez de un grado menor). Ası, si xp(t) fuera un polinomiode grado n entonces x′p(t) serıa un polinomio de grado n − 1 y x′′p(t) serıa un polinomio degrado n − 2. De esta forma x′′p(t) + 3x′p(t) + 2xp(t) serıa un polinomio de grado n. Comolo que buscamos es una funcion xp(t) tal que x′′p(t) + 3x′p(t) + 2xp(t) = 3t + 1 entonces esnatural pensar que posiblemente un polinomio de grado 1 pueda ser solucion de la ecuacion.Es decir, intentaremos ver si xp(t) = At + B es solucion de la ecuacion para algunos valoresde A y B.

210 Ecuaciones diferenciales de segundo orden
Esta forma de proceder se conoce con el nombre de Metodo de los CoeficientesIndeterminados.
Para que xp(t) = At + B sea una solucion de la ecuacion debe suceder que
x′′p(t) + 3x′p(t) + 2xp(t) = 3t + 1
perox′p(t) = Ax′′p(t) = 0
Ası pues xp(t) = At + B es solucion de la ecuacion si
0 + 3A + 2(At + B) = 3t + 1
con lo que identificando los coeficientes tenemos que
2A = 33A + 2B = 1
y resolviendo este sistema obtenemos A =3
2y B = −7
4. Por lo tanto, la funcion
xp(t) =3t
2− 7
4
es una solucion particular de la ecuacion no homogenea.
El metodo de los coeficientes indeterminados se puede aplicar cuando el termino indepen-diente es una funcion como las que aparecen en las soluciones de los sistemas. En concreto
(a) r(t) = rntn + rn−1tn−1 + · · ·+ r1t + r0, polinomio de grado n.
Tal y como hemos visto mas arriba es plausible pensar que puede encontrarse una solucionparticular de la ecuacion no homogenea del mismo tipo:
xp(t) = Antn + An−1tn−1 + · · ·+ A1t + A0
Para ello, se debe sustituir xp(t) en la ecuacion e identificar los coeficientes:
x′p(t) = nAntn−1 + (n− 1)An−1tn−2 + · · ·+ A1
x′′p(t) = n(n− 1)Antn−2 + (n− 1)(n− 2)An−1tn−3 + cdots + 2A2.
Y
x′′p(t) + px′p(t) + qxp(t) = qAntn + (qAn−1 + pnAn)tn−1 + (qAn−2 + pAn−1 + An)tn−2+
= · · ·+ (qA1 + 2pA2 + 2 · 3A3)t + (qA0 + pA1 + 2A2)

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 211
Identificando los coeficientes:
qAn = rn
qAn−1 + pnAn = rn−1
qAn−2 + pAn−1 + An = rn−2...
......
qA1 + 2pA2 + 2 · 3A3 = r1
qA0 + pA1 + 2A2 = r0
obtenemos un sistema de n + 1 ecuaciones con n + 1 incognitas. En la primera ecuacion
podemos despejar An =rn
qsiempre q 6= 0. Una vez obtenido el coeficientes An, lo sustituımos
en la segunda ecuacion y podemos despejar An−1 (de nuevo, siempre que q 6= 0). SustituımosAn y An−1 en la tercera ecuacion y despejamos An−2, y ası sucesivamente.
Como vemos, existe una solucion particular polinomial siempre que q 6= 0. Si q = 0 talsolucion no existe. Por ejemplo la ecuacion:
x′′ + x′ = 5
En este caso r(t) es un polinomio de grado cero, por lo que deberıamos buscar una solucionde la forma xp(t) = A. Sin embargo tal cosa no es posible porque x′′p(t) = x′p(t) = 0 con lo quenunca x′′p(t) + x′p(t) = 5. Esta situacion excepcional ocurre debido a que cualquiera que seaA la funcion x(t) = A es solucion de la ecuacion homogenea. Esto se puede comprobar sinmas que sustituir, pero a fin de conseguir un criterio general calculamos la solucion generalde la ecuacion
x′′ + px′ = 0
La ecuacion caracterıstica es λ2 + pλ = 0; y las raıces son λ1 = 0 y λ2 = −p. La soluciongeneral es entonces
xh(t) = c1 + c2e−pt
De aquı vemos que, haciendo c2 = 0, las funciones constantes x(t) = c1 son solucion de laecuacion homogenea. Ası pues, si q = 0 y p 6= 0 entonces tomamos como solucion particularde la ecuacion x′′ + px′ = rnt
n + rn−1tn−1 + · · ·+ r1t + r0 el polinomio
xp(t) = t(Antn + An−1tn−1 + · · ·+ A1t + A0).
En primer lugar, escogemos un polinomio de grado n + 1 para que x′′p(t) + px′p(t) sea unpolinomio de grado n. Y lo escogemos sin termino independiente porque al sustituir el terminoindependiente en la ecuacion nos da cero.
Al derivar y sustituir en la ecuacion obtenemos, de nuevo, un sistema de n+1 ecuacionescon n + 1 incognitas, que tiene solucion si y solo si p 6= 0. Si p = 0 entonces la solucionparticular que se toma es
xp(t) = t2(Antn + An−1t
n−1 + · · ·+ A1t + A0).

212 Ecuaciones diferenciales de segundo orden
Las razones para tomar un polinomio de grado n + 2 y sin termino independiente y deprimer grado son las mismas que mas arriba.
Ası para resolver la ecuacion x′′+x = 5 tomarıamos xp(t) = At. Derivando y sustituyendo:
5 = x′p(t) + x′′p(t) = A + 0
por lo que xp(t) = 5t es una solucion particular de la ecuacion no homogenea.
(b) r(t) = eαt(rntn + rn−1t
n−1 + · · ·+ r1t + r0)
Este caso se reduce al anterior haciendo el cambio de variable
x(t) = eαtu(t).
La ecuacion que se obtiene es
u′′ + p1u′ + q1u = rnt
n + rn−1tn−1 + · · ·+ r1t + r0,
siendo p1 = 2α + p y q1 = α2 + pα + q. Observese que ahora q1 = 0 es equivalente a que αsea raız de la ecuacion caracterıstica de la ecuacion. Y que p1 = q1 = 0 equivale a que α searaız caracterıstica doble. En efecto, las raıces de la ecuacion caracterıstica λ2 + pλ + q = 0son
1
2
(−p±
√p2 − 4q
).
Entonces q1 = 0 significa que α2 + pα + q = 0; es decir, que α es raız de la ecuacioncaracterıstica. Y que q1 = p1 = 0 significa que α es raız y que α = −p/2, lo que implica que(observemos la forma de las raıces) p2 − 4q = 0; es decir, que α es raız doble. Segun esto, yteniendo en cuenta el caso en el que el termino independiente es polinomial concluımos quela solucion particular debemos escogerla de acuerdo con el siguiente criterio:
xp(t) =
(Antn + An−1tn−1 + · · ·+ A1t + A0)e
αt si α no es valor propiot(Ant
n + An−1tn−1 + · · ·+ A1t + A0)e
αt si α es valor propio simplet2(Ant
n + An−1tn−1 + · · ·+ A1t + A0)e
αt si α es valor propio doble
Veamos dos ejemplos:
Ejemplo 11.8 .- Hayar las soluciones generales de las siguientes ecuaciones
(i) x′′ + 3x′ + 2x = e3t
(ii) x′′ − 8x′ + 16x = e4t

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 213
Solucion.- (i) El polinomio caracterıstico es λ2 + 3λ + 2 = 0 cuyas raıces son λ1 = −2 yλ2 = −1. La solucion general de la ecuacion homogenea es:
xh(t) = c1e−2t + c2e
−t
Por lo tanto α = 3 no es valor propio de la ecuacion. Buscamos una solucion particular dela forma xp(t) = Ae3t. Para ello calculamos x′p(t) = 3Ae3t y x′′p(t) = 9Ae3t. Sustituyendo enla ecuacion:
e3t = x′′p(t) + 3x′p(t) + 2xp(t) = e3t(20A)
Por lo tanto, A =1
20y xp(t) =
e3t
20es una solucion particular de la ecuacion no homogenea.
La solucion general de la ecuacion no homogenea sera:
x(t) = c1e−2t + c2e
−t +e3t
20
(ii) El polinomio caracterıstico en este caso es λ2 − 8λ + 16 = 0 que tiene una raız dobleλ1 = 4. La solucion general de la ecuacion homogenea es:
xh(t) = (c1 + c2t)e4t
Ahora α = 4 es valor propio doble de la ecuacion, por lo tanto, la solucion particularsera xp(t) = At2e4t. Para calcular A hacemos x′p(t) = 2At(1 + 2t)e4t, x′′p(t) = 2A(1 + 8t +8t2)e4t. Ası
e4t = x′′p(t)− 8x′p(t) + 16xp(t) = e4t[2A(1 + 8t + 8t2)− 16At(1 + 2t) + 16At2] == 2Ae4t
con lo que A =1
2y xp(t) =
t2
2e4t. La solucion general de la ecuacion no homogenea serıa:
x(t) = (c1 + c2t)e4t +
t2
2e4t
(c) r(t) = eat cos(bt)(rntn + rn−1t
n−1 + · · · + r1t + r0) o bien r(t) = eat sen(bt)(rntn +
rn−1tn−1 + · · ·+ r1t + r0)
Este caso se puede reducir al anterior considerando soluciones complejas. La reduccionse basa en el siguiente lema que es a la vez simple y muy util:
Lema 11.9 .- Sea x(t) = u(t) + iv(t) un solucion compleja de la ecuacion
x′′ + px′ + qx = r(t). (11.15)

214 Ecuaciones diferenciales de segundo orden
siendo p y q numeros reales y r(t) = r1(t) + ir2(t) una funcion, posiblemente compleja.Entonces u(t) es solucion de la ecuacion
x′′ + px′ + qx = r1(t),
y v(t) es solucion de la ecuacion
x′′ + px′ + qx = r2(t).
Demostracion.- Debemos observar que aunque r(t) sea una funcion real se puede escribircomo r(t) = r1(t) + ir2(t). Basta poner r2(t) = 0.
Que x(t) = u(t) + iv(t) es solucion de la ecuacion (11.15) significa que
(u′′(t) + iv′′(t)) + p(u′(t) + iv′(t)) + q(u(t) + iv(t)) = r1(t) + ir2(t).
Igualando las partes reales e imaginarias:
u′′(t) + pu′(t) + qu(t) = r1(t), yv′′(t) + pv′(t) + qv(t) = r2(t).
Esto significa que u(t) y v(t) son soluciones de las ecuaciones
x′′ + px′ + qx = r1(t) yx′′ + px′ + qx = r2(t),
respectivamente.
Recordemos ahora la formula de Euler
e(a+bi)t = eat(cos(bt) + i sen(bt)).
Supongamos que yp(t) = x1p(t)+ix2p(t) es una solucion compleja particular de la ecuacion
x′′ + px′ + qx = e(a+ib)t(rntn + rn−1tn−1 + · · ·+ r0).
Pongamos por simplicidad notacional g(t) = rntn + rn−1tn−1 + · · ·+ r0. Como
e(a+ib)tg(t) = eat cos(bt)g(t) + ieat sen(bt)g(t),
resulta que eat cos(bt)g(t) es la parte real de e(a+ib)tg(t) y eat sen(bt)g(t) es la parte imaginariade e(a+ib)tg(t). Aplicando el Lema 11.9 deducimos que x1p(t) es una solucion particular de laecuacion
x′′ + px′ + qx = eat cos(bt)g(t),

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 215
y x2p(t) es una solucion particular de la ecuacion
x′′ + px′ + qx = eat sen(bt)g(t).
La obtencion de yp(t), que es la solucion particular compleja de
x′′ + px′ + qx = e(a+ib)t(rntn + rn−1t
n−1 + · · ·+ r0)
se hace como en el apartado anterior
Ejemplo 11.10 .- Hallar soluciones particulares de las siguientes ecuaciones:
(a) x′′ + 2x′ + x = tet cos t (b) x′′ + 4x = sen(2t)
Solucion.- (a) En primer lugar tet cos t es la parte real de te(1+i)t, de modo que α = 1+ i.Ahora, la ecuacion caracterıstica es λ2 + 2λ + 1 = 0, ası que la ecuacion homogenea solotiene una raiz doble λ = −1. Como α 6= −1, una solucion particular compleja de la ecuacionx′′ + 2x′ + x = te(1+i)t es yp(t) = (At + B)e(1+i)t. Derivamos esta funcion
y′p(t) = (A(1 + i)t + B(1 + i) + A)e(1+i)t
y′′p(t) = (A(1 + i)2t + B(1 + i)2 + 2A(1 + i))e(1+i)t.
Y sustituyendo en x′′ + 2x′ + x = te(1+i)t obtenemos
(A[(1 + i)2 + 2(1 + i) + 1]t + B[(1 + i)2 + 2(1 + i) + 1] + A[2(2 + i)])e(1+i)t = te(1+i)t
Como (1 + i)2 + 2(1 + i) + 1 = (2 + i)2 y simplificando
A(2 + i)2t + B(2 + i)2 + 2A(2 + i) = t.
Identificando coeficientes:A(2 + i)2 = 12A + B(2 + i) = 0.
Ası
A =1
(2 + i)2=
3− 4i
25,
y
B =−2A
2 + i=
−2
(2 + i)3=−4 + 22i
125.
Entonces
yp(t) = e(1+i)t(At + B) = et(cos t + i sen t)
(3− 4i
25t +
−4 + 22i
125
)
=et
125(cos t + i sen t)(15t− 4 + (−20t + 22)i)
=et
125([(15t− 4) cos t + (20t− 22) sen t] + i[(22− 20t) cos t + (15t− 4) sen t]).

216 Ecuaciones diferenciales de segundo orden
Como hemos dicho mas arriba tet cos t es la parte real de te(1+i)t, por lo que solo estamosinteresados en la parte real de yp(t). Es decir, una solucion particular de la ecuacion es:
xp(t) =et
125((15t− 4) cos t + (20t− 22) sen t).
(b) Para la ecuacion x′′ + 4x = sen(2t) tenemos que sen(2t) es la parte imaginaria dee2it. Por lo tanto α = 2i. La ecuacion caracterıstica es λ2 + 4λ = 0 y sus raıces ±2i. Comoα es un valor propio de la ecuacion homogenea, la solucion particular que buscamos tiene laforma yp(t) = Ate2it. Derivamos
y′p(t) = e2it(A + 2Ati)y′′p(t) = e2it(4Ai− 4At).
Sustituımos en la ecuacion x′′ + 4x = e2it:
e2it = y′′p(t) + 4yp(t) = e2it(4Ai− 4At + 4At) = 4Aie2it.
ası
A =1
4i= − i
4.
Por lo tanto
yp(t) = − i
4te2it = − t
4(cos(2t) + i sen(2t))i = − t
4(− sen(2t) + i cos(2t)).
La solucion particular de x′′ + 4x = sen(2t) es la parte imaginaria de yp(t):
xp(t) = − t
4cos(2t).
Un par de observaciones finales antes de dar el resultado que resume todo lo que hemosdiscutido en esta seccion. Si en la ecuacion no homogenea x′′ + px′ + qx = r(t), el terminoindependiente es de la forma eat cos(bt)g(t) o eat sen(bt)g(t), con g(t) un polinomio de gradon, entonces se busca una solucion particular compleja de la ecuacion
x′′ + px′ + qx = e(a+bi)tg(t)
Esta solucion particular compleja sera de la forma yp(t) = e(a+bi)th(t), si a + bi no es valorpropio de la ecuacion homogenea x′′ + px′ + qx = 0, o de la forma yp(t) = te(a+bi)th(t), sia + bi es valor propio de la ecuacion homogenea. En ambos casos h(t) es un polinomio degrado n. Los coeficientes de este polinomio estan indeterminados y se obtienen al sustituiryp(t) y sus derivadas en la ecuacion no homogenea. Hasta aquı todo es sabido. Lo que esimportante observar, tal y como se ve en los ejemplos de mas arriba, es que al resolver el

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 217
sistema que se plantea para calcular los coeficientes del polinomio h(t) puede ser que seobtengan numeros complejos. Es decir, el polinomo h(t) en yp(t) es en general de coeficientescomplejos. Entonces h(t) se puede escribir como h(t) = h1(t) + h2(t)i, con h1(t) y h2(t)polinomios de coeficientes reales, de grado menor o igual que n y uno de ellos, al menos,de grado exactamente n. Esto nos permite ser un poco mas explıcitos sobre la forma de lasolucion particular. Esta debe ser
yp(t) = eat(cos(bt) + i sen(bt))(h1(t) + ih2(t)= eat(h1(t) cos(bt)− h2(t) sen(bt) + i[h2(t) cos(bt) + h1(t) sen(bt)]),
si a + bi no es valor propio de la ecuacion homogenea; o
yp(t) = teat(cos(bt) + i sen(bt))(h1(t) + ih2(t)= teat([h1(t) cos(bt)− h2(t) sen(bt)] + i[h2(t) cos(bt) + h1(t) sen(bt)]),
si a + bi es valor propio de la ecuacion homogenea.
Si la ecuacion que queremos resolver es x′′ + px′ + qx = eat cos(bt)g(t), solo nos interesala parte real de yp(t), de modo que la solucion particular de esta ecuacion sera de la forma
xp(t) =
{eat(h1(t) cos(bt)− h2(t) sen(bt)) si a + bi no es valor propio de la ecuacion homogeneateat(h1(t) cos(bt)− h2(t) sen(bt)) si a + bi es valor propio de la ecuacion homogenea.
Y si la ecuacion que queremos resolver es x′′ + px′ + qx = eat sen(bt)g(t), solo nos interesala parte imaginaria de yp(t), de modo que la solucion particular de esta ecuacion sera de laforma
xp(t) =
{eat(h2(t) cos(bt) + h1(t) sen(bt)) si a + bi no es valor propio de la ecuacion homogeneateat(h2(t) cos(bt) + h1(t) sen(bt)) si a + bi es valor propio de la ecuacion homogenea.
Ası, en la parte (a) del Ejemplo 11.10, x′′ + 2x′ + x = tet cos t, la solucion particulartendrıa la siguiente forma
xp(t) = et[(At + B) cos t + (Ct + D) sen t],
porque 1 + i no es valor propio de la ecuacion homogenea y el termino independiente esr(t) = tet cos t. En la parte (b) (x′′ + 4x = sen(2t)), sin embargo, la solucion particular serıa
xp(t) = t(A cos(2t) + B sen 2t))
porque 2i es valor propio de la ecuacion homogenea y el termino independiente es r(t) =sen(2t).
Emplear la soluciones complejas o esta ultima forma mas directa es cuestion de gustos.Ambos procediemientos conducen a la misma solucion particular
Un ultimo ejemplo para reforzar esta ultima forma de proceder.

218 Ecuaciones diferenciales de segundo orden
Ejemplo 11.11 .- Encuentrese la solucion general de la ecuacion x′′ + x = t cos t.
Solucion.- La ecuacion caracterıstica es λ2 + 1 = 0 que tiene dos raıces complejas con-jugadas λ1 = i y λ2 = −i. La solucion general de la ecuacion homogenea es:
xh(t) = c1 cos t + c2 sen t.
Como cos t es la parte real de eit e i es valor propio de la ecuacion homogenea, la solucionparticular debe ser de la forma xp(t) = t[(At+B) cos t+(Ct+D) sen t). Tenemos que derivar
x′p(t) = (Ct2 + (D + 2A)t + B) cos t + (−At2 + (2C −B)t + D) sen tx′′p(t) = (−At2 + (4C −B)t + 2D + 2A) cos t + (−Ct2 − (4A + D)t + 2C − 2B) sen t
y sustituir
cos t = (−At2 + (4C −B)t + 2D + 2A) cos t + (−Ct2 − (4A + D)t + 2C − 2B) sen t+(At2 + Bt) cos t + (Ct2 + Dt) sen t
= (4Ct + 2D + 2A) cos t + (−4At + 2C − 2B) sen t
De aquı sacamos que −4A = 0, 2C − 2B = 0, 4C = 1 y 2D +2A = 0. Ası pues, C = B =1
4.
Por lo tanto xp(t) =t
4cos t +
t2
4sen t. Y la solucion general de la ecuacion no homogenea es
x(t) = c1 cos t + c2 sen t +t
4cos t +
t2
4sen t.
La ultima observacion es que si r(t) es suma de dos funciones, digamos r(t) = r1(t)+r2(t)entonces es facil comprobar que la solucion general de x′′ + px′ + qx = r(t) se puede escribiren la forma:
x(t) = xh(t) + xp1(t) + xp2(t)
donde xh(t) es, como siempre, la solucion general de la ecuacion homogenea, xp1(t) es unasolucion particular de la ecuacion x′′+ px′+ qx = r1(t) y xp2(t) es una solucion particular dex′′ + px′ + qx = r2(t). Por ejemplo, hemos visto en el Ejemplo 11.8 que la solucion generalde la ecuacion
x′′ + 3x′ + 2x = 0
esxh(t) = xh(t) = c1e
−2t + c2e−t
y que la funcion xp1(t) =e3t
20es una solucion particular de la ecuacion x′′ + 3x′ + 2x =
e3t. Tambien se puede ver que xp2(t) =3t
2− 7
4es una solucion particula de la ecuacion
x′′ + 3x′ + 2x = 3t + 1. Entonces
x(t) = xh(t) + xp1(t) + xp2(t) = c1e−2t + c2e
−t +e3t
20+
3t
2− 7
4

11.3 Ecuaciones Lineales de Segundo Orden Con Coeficientes Constantes 219
es la solucion general de la ecuacion
x′′ + 3x′ + 2x = e3t + 3t + 1.
En particular, si r(t) = eat[Pn(t) cos(bt) + Qm(t) sen(bt)], con Pn(t) y Qm(t) polinomiosde grados n y m respectivamente, entonces podemos escribir r(t) = r1(t) + r2(t) con r1(t) =eatPn(t) cos(bt) y r2(t) = eatQm(t) sen(bt). Las soluciones particulares correspondientes aestos dos terminos independientes serıan, segun lo visto mas arriba:
xp1(t) = tseat[Pn(t) cos(bt) + Qn(t) sen(bt)] y
xp2(t) = tseat[Pm(t) cos(bt) + Qm(t) sen(bt)],
donde s = 1 o 0 segun que a+bi sea o no valor propio de la ecuacion homogenea, Pn(t) y Qn(t)son polinomios indeterminados de grado n y Pm(t) y Qm(t) son polinomios indeterminadosde grado m. Al sumar estas dos soluciones particulares obtenemos una solucion particularde la ecuacion no homogenea:
xp(t) = xp1(t) + xp2(t) = tseat[(Pn(t) + Pm(t)) cos(bt) + (Qn(t) + Qm(t)) sen(bt)].
Poniendo Pk(t) = Pn(t) + Pm(t) y Qk(t) = Qn(t) + Qm(t) tenemos que
xp(t) = tseat(Pk(t) cos(bt) + Qk(t) sen(bt))
donde s es la multiplicidad de a + bi como raız caracterıstica y Pk(t) y Qk(t) son polinomiosindeterminados de grado k = max(n,m).
Ahora podemos resumir todos los resultados obtenidos sobre el metodo de los coeficientesindeterminados en el siguiente teorema
Teorema 11.12 .- Si el segundo miembro de la ecuacion x′′+px′+qx = r(t) es de la forma
r(t) = eat[Pn(t) cos(bt) + Qm(t) sen(bt)]
donde Pn(t) y Qm(t) representan polinomios de grados n y m respectivamente, entoncesexiste una solucion particular de la ecuacion de la forma:
xp(t) = tseat[Pk(t) cos(bt) + Qk(t) sen(bt)]
donde s es la multiplicidad de a + bi como raız caracterıstica y Pk(t) y Qk(t) son polinomiosde coeficientes indeterminados de grado k = max(n,m)
En la expresionr(t) = eat[Pn(t) cos(bt) + Qm(t) sen(bt)]

220 Ecuaciones diferenciales de segundo orden
estan todas las formas posibles de terminos independientes a las que se les puede aplicar elmetodo de los coeficientes indeterminados. Ası, si a = b = 0 entonces r(t) = Pn(t) es unpolinomio de grado n. Si b = 0 y a 6= 0 entonces r(t) = eatPn(t) (caso (b)) y si b 6= 0 tenemosla forma mas general. El caso r(t) = eatPn(t) cos(bt) se obtiene cuando Qm(t) = 0 y el casor(t) = eatQm(t) sen(bt) se obtiene cuando Pn(t) = 0. Al polinomio cero se le suele asignargrado −∞. Ası Qm(t) = 0 significa que m = −∞ y Pn(t) = 0 significa que n = −∞.