
Guía estudiante Carro
16
Elaborado por: Grupo de Investigación Sistemas Inteligentes, Robótica y Percepción- SIRP- Pontificia Universidad Javeriana-Bogotá, 2010. El contenido de este documento se encuentra bajo licencia Creative Commons Atribution-ShareAlike 3.0 Unported TALLER: CONSTRUCCIÓN DE UN ROBOT MÓVIL QUE SIGUE LÍNEAS Área: Tecnología Tema: Robótica Móvil. Conceptos relacionados: Sensores de tipo encendido-apagado. Mecanismos reductores de velocidad. Poleas. Motores de corriente continua. Objetivos: 1. Construir un robot móvil cuya tarea es seguir una línea de color negro sobre un piso de color blanco. 2. Aplicar los mecanismos de reducción de velocidad a una máquina más compleja donde pueda observarse su utilidad. 3. Presentar la robótica como una integración de diferentes ramas del conocimiento: Física, matemáticas y tecnología. Introducción En la actualidad, los robots son cada vez más comunes en aplicaciones simples como transportar objetos de un lugar a otro, al igual que para realizar tareas tan complejas como construir una máquina o supervisar un proceso. Sin importar cuan simple o compleja sea la tarea que realice el robot, pueden encontrarse principalmente tres campos del conocimiento involucrados en la construcción de un robot:
-
Upload
dayan-valero -
Category
Documents
-
view
219 -
download
0
description
Guía estudiante Carro
Transcript of Guía estudiante Carro

Elaborado por: Grupo de Investigación Sistemas Inteligentes, Robótica y Percepción- SIRP- Pontificia Universidad Javeriana-Bogotá, 2010.
El contenido de este documento se encuentra bajo licencia Creative Commons Atribution-ShareAlike 3.0 Unported
TALLER: CONSTRUCCIÓN DE UN ROBOT MÓVIL QUE SIGUE LÍNEAS
Área: Tecnología
Tema: Robótica Móvil.
Conceptos relacionados: Sensores de tipo encendido-apagado. Mecanismos reductores de velocidad. Poleas. Motores de
corriente continua.
Objetivos: 1. Construir un robot móvil cuya tarea es seguir una línea de color negro sobre un piso de color
blanco.
2. Aplicar los mecanismos de reducción de velocidad a una máquina más compleja donde pueda
observarse su utilidad.
3. Presentar la robótica como una integración de diferentes ramas del conocimiento: Física,
matemáticas y tecnología.
Introducción
En la actualidad, los robots son cada vez más comunes en aplicaciones simples como transportar objetos
de un lugar a otro, al igual que para realizar tareas tan complejas como construir una máquina o
supervisar un proceso. Sin importar cuan simple o compleja sea la tarea que realice el robot, pueden
encontrarse principalmente tres campos del conocimiento involucrados en la construcción de un robot:

Física: Esta disciplina está fuertemente ligada a la construcción del cuerpo del robot. Desde la física se
calculan las dimensiones más adecuadas para las diferentes partes que componen al robot: haciendo un
estudio juicioso desde la física, se consigue optimizar el consumo energético del robot, y aumentar la
vida útil de los componentes electromecánicos del robot.
Matemáticas: Es el campo del conocimiento que soporta desde el punto de vista racional todos los
estudios que se realizan en las ciencias naturales, como la física. Los modelos propuestos por las ciencias
naturales se basan en las reglas que se proponen desde las matemáticas. Es gracias a las matemáticas
que la humanidad ha conseguido formalizar el conocimiento que posee del mundo, para volverlo útil, de
manera que pueda predecir el comportamiento de un sistema real, ya sea éste biológico, físico, químico,
o de otra naturaleza.
Tecnología: Producto de la aplicación del conocimiento físico y matemático (generalmente por los
ingenieros), la tecnología es la máxima expresión del intelecto humano, esta poderosa ha permitido a la
especie humana convertirse en dominante sobre todas las demás especies en el planeta.
La práctica busca que el estudiante se acerque a la robótica desde una perspectiva amable, en la que se
divierta al tiempo que observa cómo convergen todas las asignaturas, para construir una máquina que
es útil a las personas.
Preguntas previas (Consulte la bibliografía):
¿Qué es un sensor?
¿Qué es un robot?
¿Por qué tienen sensores los robots?
¿Qué tipo de sensor debería tener un robot cuya tarea es desplazarse sobre una
línea?
¿Cómo funciona un vehículo de tracción diferencial?
En un motor de corriente continua, ¿de qué depende el sentido de giro?
¿Qué es una rueda loca?
Resuelva el siguiente ejercicio explicando su respuesta: La compañía de bodegaje
BODEGUITAS S.A., ha decidido automatizar su sistema de bodegaje, de manual, a
automático. Para ello se asesoró del ingeniero Ignacio Inventos. El ingeniero
Inventos determinó que los robots funcionarían mediante tracción diferencial y
seguirían una ruta en el piso de la bodega que los llevaría frente a los estantes donde
se almacenan los productos que guarda BODEGUITAS S.A. Sin embargo, el ingeniero
no pudo terminar el diseño porque la semana pasada sufrió un accidente mientras
hacía pruebas con la grúa que planea instalar sobre los robots una vez estén
operando. BODEGUITAS lo ha contactado a usted para que termine la lógica que el
ingeniero no pudo concluir. Los planos que dejó el Ingeniero pueden consultarse en
la Figura 1.
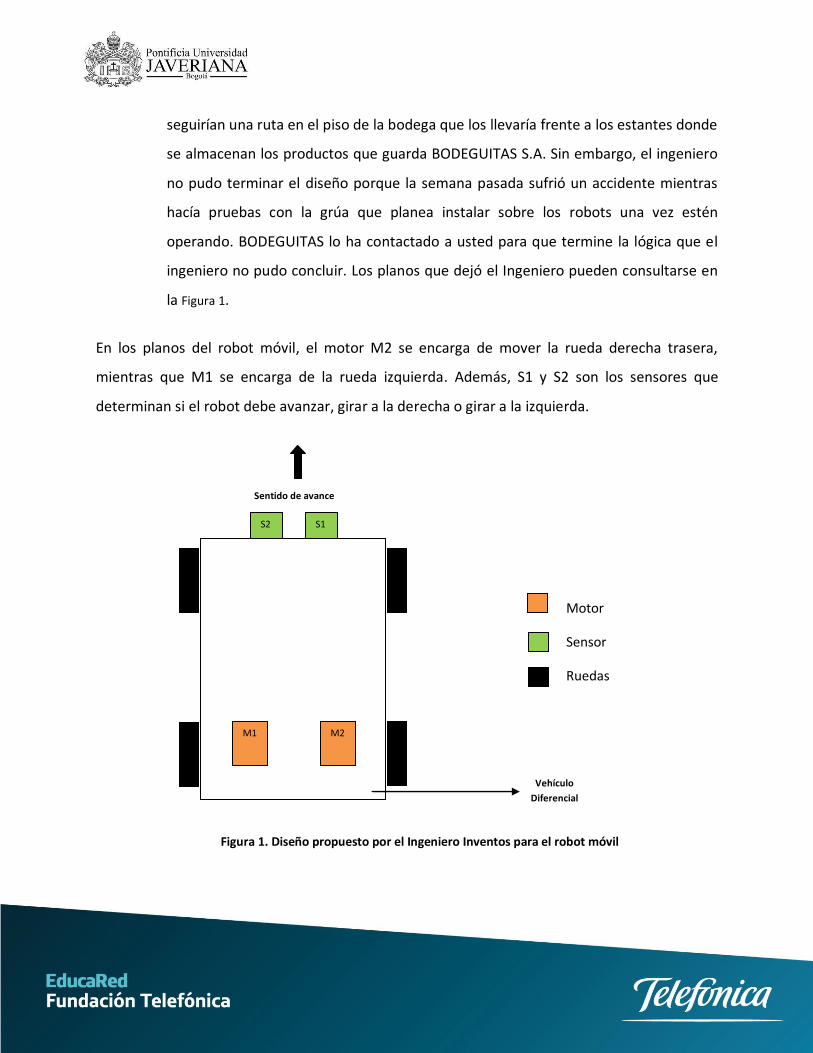
En los planos del robot móvil, el motor M2 se encarga de mover la rueda derecha trasera,
mientras que M1 se encarga de la rueda izquierda. Además, S1 y S2 son los sensores que
determinan si el robot debe avanzar, girar a la derecha o girar a la izquierda.
S2
M1
Motor
Sensor
Ruedas
S1
M2
Sentido de avance
Vehículo
Diferencial
Figura 1. Diseño propuesto por el Ingeniero Inventos para el robot móvil
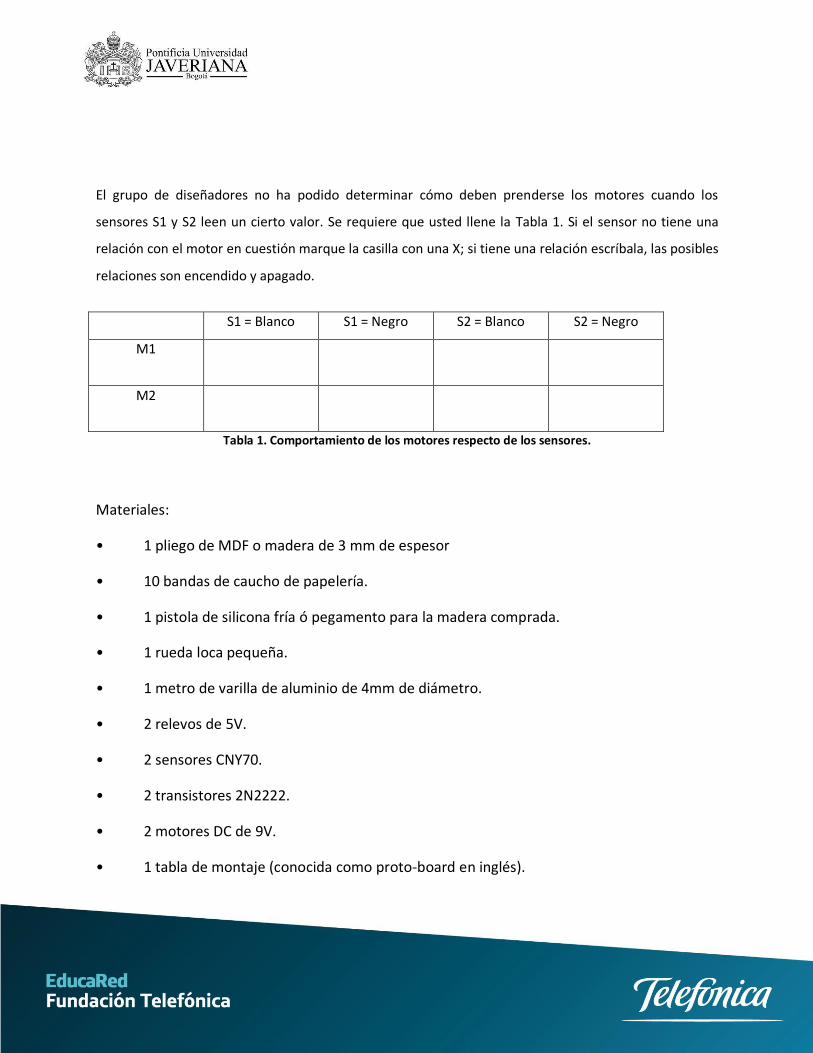
El grupo de diseñadores no ha podido determinar cómo deben prenderse los motores cuando los
sensores S1 y S2 leen un cierto valor. Se requiere que usted llene la Tabla 1. Si el sensor no tiene una
relación con el motor en cuestión marque la casilla con una X; si tiene una relación escríbala, las posibles
relaciones son encendido y apagado.
S1 = Blanco S1 = Negro S2 = Blanco S2 = Negro
M1
M2
Tabla 1. Comportamiento de los motores respecto de los sensores.
Materiales:
• 1 pliego de MDF o madera de 3 mm de espesor
• 10 bandas de caucho de papelería.
• 1 pistola de silicona fría ó pegamento para la madera comprada.
• 1 rueda loca pequeña.
• 1 metro de varilla de aluminio de 4mm de diámetro.
• 2 relevos de 5V.
• 2 sensores CNY70.
• 2 transistores 2N2222.
• 2 motores DC de 9V.
• 1 tabla de montaje (conocida como proto-board en inglés).
• 1 Baterías de 9V.
• 2 resistencias de 500 Ω.
• Herramientas varias.
Procedimiento:
PARTE I: Construcción de un vehículo móvil
No realice ninguna operación de corte o taladrado sin la supervisión de un adulto, preferiblemente, el
docente de la asignatura.
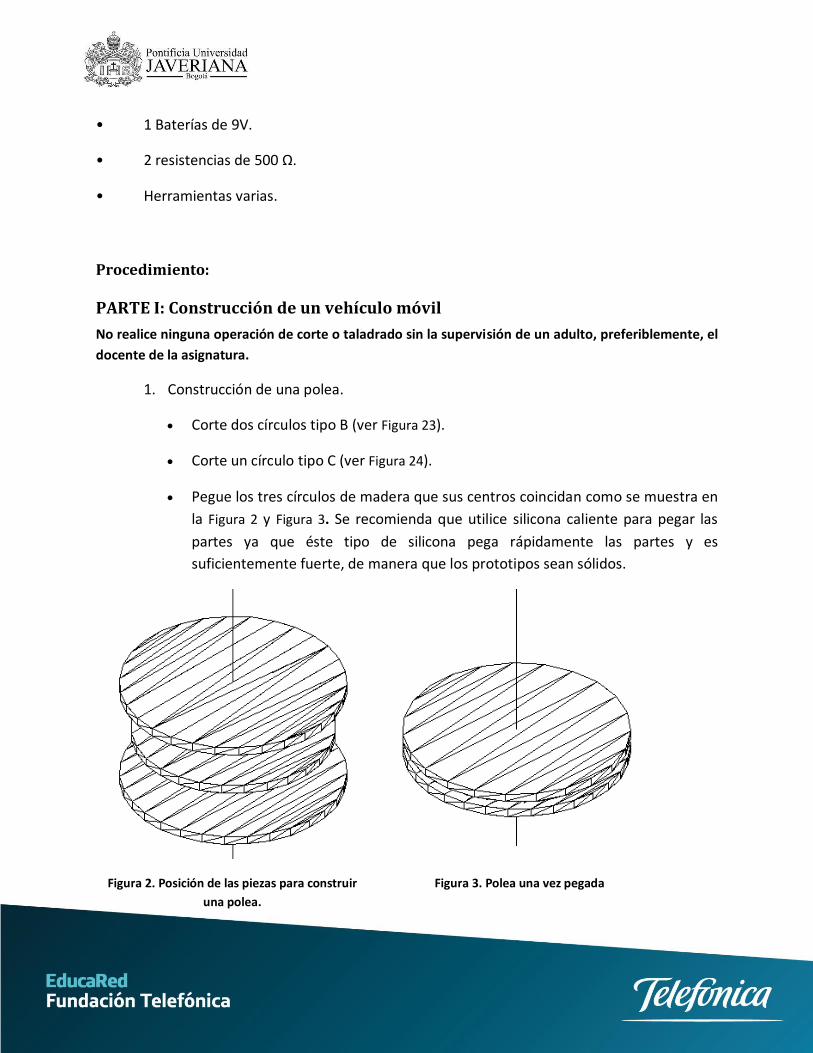
1. Construcción de una polea.
Corte dos círculos tipo B (ver Figura 23).
Corte un círculo tipo C (ver Figura 24).
Pegue los tres círculos de madera que sus centros coincidan como se muestra en
la Figura 2 y Figura 3. Se recomienda que utilice silicona caliente para pegar las
partes ya que éste tipo de silicona pega rápidamente las partes y es
suficientemente fuerte, de manera que los prototipos sean sólidos.
Figura 2. Posición de las piezas para construir
una polea.
Figura 3. Polea una vez pegada

Haga un agujero de 4mm de diámetro en el centro de la polea (el agujero debe
atravesarla), de manera que la varilla de 4mm de diámetro pase a través de éste
ajustada (ver Figura 4). El agujero debe quedar perpendicular a la polea porque
de no ser así, el mecanismo puede no funcionar correctamente.
Figura 4. Polea con agujero de 4mm atravesando
su centro
Figura 5. Polea con eje.
Corte 10cm de varilla de aluminio. Insértela en el agujero de la polea. Ver Figura
5.
A este elemento se le conoce como polea, y será utilizado muchas veces en el
desarrollo del presente taller.
2. Construcción del chasis del vehículo móvil.
Corte una pieza tipo A (ver Figura 22).
Consejo: Para abrir los agujeros cuadrados en el interior de la pieza, utilice un
taladro primero para abrir un agujero a través del cual pueda introducir la hoja de la
sierra de calar. Nuevamente, se recomienda que no utilice la sierra de calar sin
supervisión del docente.
3. Preparativos para la construcción del mecanismo reductor de velocidad.
Corte 12 piezas tipo B (ver Figura 23) y 6 piezas tipo C (ver Figura 24). Construya 6

poleas de 9cm de diámetro. Esto quiere decir, que el círculo de la mitad (el que
se encuentra entre los círculos grandes) debe tener 9cm de diámetro.
Corte 8 piezas tipo D (ver Figura 25) y 4 piezas tipo E (ver Figura 26). Construya 4
poleas de 2cm de diámetro. Recomendación: Es posible que resulte difícil
recortar estas piezas debido a que son muy pequeñas, en ese caso, se
recomienda que busque en el comercio poleas pequeñas de madera que
cumplan con las dimensiones de la forma más aproximada posible.
No corte los ejes de las poleas, mas adelante se le indicará cuántos y de qué
tamaño deben ser.
Corte 4 piezas tipo F (ver Figura 28) y 4 tipo G (Ver Figura 27). Los agujeros en las
piezas tipo F son de 4mm de diámetro. A diferencia de los agujeros de las poleas,
estos agujeros deben quedar holgados de modo que la varilla de aluminio de
4mm pueda rodar suavemente al introducirse en ellos.
Corte de un listón de 1.5cm X 1.5cm de perfil, cuatro listones de longitud igual a
la longitud de la diagonal de las piezas F y G. Calcule ésta longitud
matemáticamente y entregue al docente los cálculos realizados. Pula los
extremos de manera que sigan la forma de las piezas tipo F y G.
Pegue uno de los listones cortados en el paso anterior a la pieza G como se
muestra en la Figura 6.
Figura 6. Listón pegado a una pieza tipo G. Figura 7. Listón y pieza G, pegados a una pieza
tipo F.

Pegue el conjunto construido en el paso anterior, a una pieza tipo F como se
muestra en la Figura 7. A ésta parte del robot le llamaremos soporte en lo que
resta del documento. Construya tres soportes más con las piezas restantes.
Corte 6 trozos de varilla de aluminio de 8.5cm de longitud.
4. Construcción del mecanismo reductor.
Arme cuatro conjuntos de poleas y ejes como los mostrados en la Figura 8. No pegue
todavía las poleas a los ejes.
Figura 8. Conjunto de polea para fabricar una reducción en cascada.
Arme dos conjuntos de poleas y ejes como los mostrados en la Figura 5. No pegue
todavía las poleas a los ejes.
Enfrente dos soportes de los construidos en el numeral anterior a una distancia de
9cm medidos entre las caras exteriores de los mismos (ver Figura 9). Verifique que
los agujeros enfrentados coincidan.

Figura 9. Disposición de los soportes.
Inserte en los dos agujeros que se encuentran a la misma altura conjuntos como el
mostrado en la Figura 8. Inserte en el agujero que se encuentra a diferente altura un
conjunto como el mostrado en la Figura 5. El resultado debe verse como en la Figura
10, Figura 11, Figura 12 y Figura 13. Puede insertar una pieza tipo D o E entre la polea
grande y la pequeña para dar distancia entre éstas. Una vez ajustadas las posiciones
de las poleas, péguelas entre ellas y a los ejes, de manera queden en posiciones fijas.
Tenga cuidado de no pegar los ejes a los soportes porque quedarán bloqueado el
movimiento rotatorio de las poleas, fundamental para el correcto funcionamiento
del mecanismo.
Figura 10. Vista 3D del mecanismo reductor Figura 11. Vista en planta del mecanismo reductor
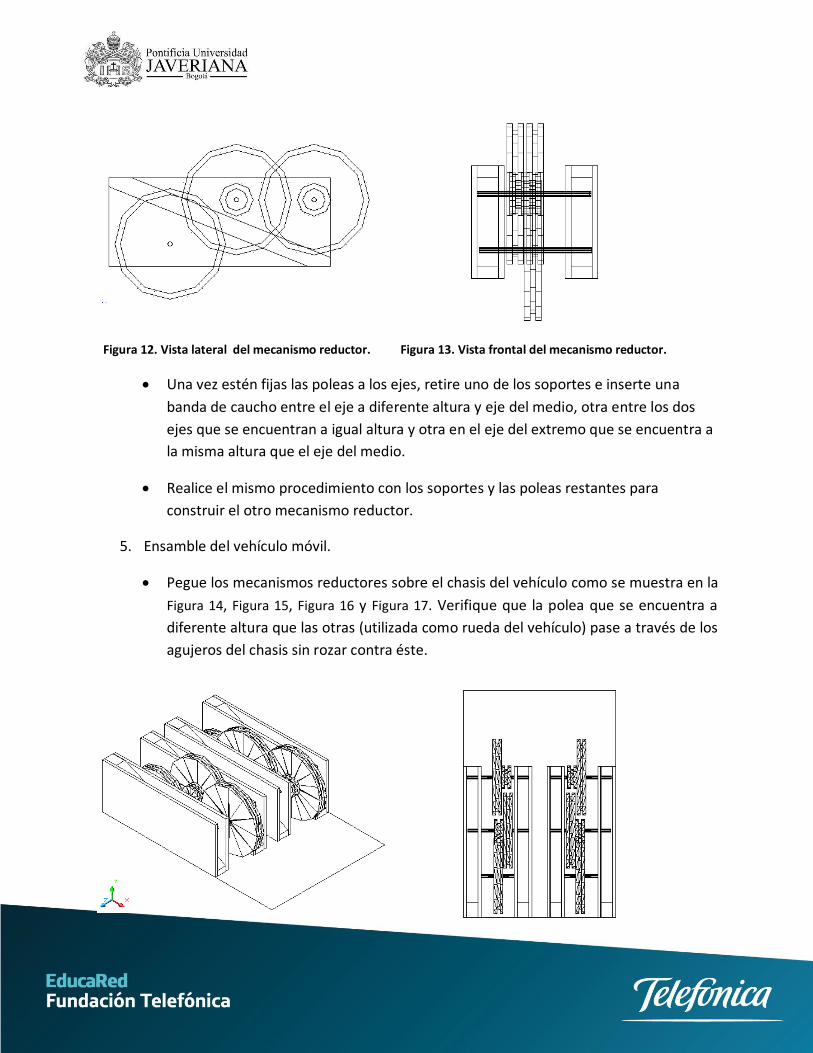
Figura 12. Vista lateral del mecanismo reductor. Figura 13. Vista frontal del mecanismo reductor.
Una vez estén fijas las poleas a los ejes, retire uno de los soportes e inserte una
banda de caucho entre el eje a diferente altura y eje del medio, otra entre los dos
ejes que se encuentran a igual altura y otra en el eje del extremo que se encuentra a
la misma altura que el eje del medio.
Realice el mismo procedimiento con los soportes y las poleas restantes para
construir el otro mecanismo reductor.
5. Ensamble del vehículo móvil.
Pegue los mecanismos reductores sobre el chasis del vehículo como se muestra en la
Figura 14, Figura 15, Figura 16 y Figura 17. Verifique que la polea que se encuentra a
diferente altura que las otras (utilizada como rueda del vehículo) pase a través de los
agujeros del chasis sin rozar contra éste.

Verifique que el mecanismo funcione correctamente instalando las bandas de
caucho de modo que unan una polea grande con una pequeña; debe quedar una
banda libre en cada mecanismo; ésta estará conectada con el eje del motor
encargado de mover el mecanismo correspondiente.
6. Instalación de los motores.
Corte de un listón de 1.5cm X 1.5cm de perfil, dos listones de 8cm de longitud.
Pegue los listones de forma que queden alineados con la primera polea del
mecanismo reductor. No se dan medidas porque éstas dependen de la disposición
de las poleas que usted haya hecho. Busque una posición intermedia. Como en estos
listones estarán pegados los motores, es importante que verifique que la tensión de
la banda de caucho sea suficiente para que ésta no se deslice, pero no excesiva para
que se reviente.
Figura 14. Vista 3D de los mecanismos reductores
ensamblados al chasis
Figura 15. Vista en planta de los mecanismos
reductores ensamblados al chasis.
Figura 16. Vista frontal de los mecanismos
reductores ensamblados al chasis.
Figura 17. Vista lateral de los mecanismos
reductores ensamblados al chasis

Figura 18. Vista 3D del vehículo con los parales
para instalar los motores
Figura 19. Vista en planta del vehículo con los
parales para instalar los motores.
Pegue un motor al extremo de cada paral. Instale la banda de caucho disponible
entre la polea grande y el eje de cada motor. Ver Figura 20.
Figura 20. Vista 3D del vehículo móvil.
Revise que todo esté en su lugar y conecte una fuente de alimentación a cada motor
para verificar el funcionamiento del mecanismo.

7. Instale la rodachina en los agujeros frontales del chasis.
¡Ha terminado el vehículo móvil!
Preguntas:
1. ¿Por qué fue necesario construir el mecanismo reductor para el robot en lugar de
instalar los motores conectados directamente a las ruedas?
2. ¿Cuáles motores deben encenderse para que el vehículo avance? ¿Cuáles para que el
vehículo retroceda? ¿Cuáles para que gira a la derecha? ¿Cuáles para que gire a la
izquierda?
PARTE II: Construcción del circuito seguidor de línea. A continuación se construirá el circuito de control del vehículo, el cual permitirá que éste (el
vehículo) se desplace siguiendo una línea negra sobre un piso blanco.
1. Construya sobre una tabla de montaje (protoboard en inglés) dos circuitos como el que
aparece en la Figura 21.

Figura 21. Esquemático del circuito de control del robot seguidor de línea.
2. Compruebe el comportamiento de los circuitos. Para ello, prepare una hoja blanca y
sobre ella pegue un trozo de cinta aislante negra. Conecte los circuitos construidos a una
fuente de alimentación de 9V. Mueva cada uno de los sensores CNY70 sobre el papel y
sobre la cinta. Debe escuchar como el relevo cambia de estado al pasar de la cinta al papel
y viceversa.
3. Analice el comportamiento del vehículo (de tipo diferencial). Analice el comportamiento
del circuito (que se resume en un interruptor controlado por el color del piso). Conecte el
circuito a los motores del vehículo de manera que el vehículo sea capaz de seguir una línea
negra (para la cual se recomienda utilizar una cinta aislante negra) sobre un piso claro
(preferiblemente blanco)
4. Instale el circuito sobre el vehículo de manera que los sensores estén en la parte
delantera del mismo y a una altura tal que los sensores estén separados del piso 1 o 2mm.
¡Felicidades, ha terminado su robot móvil seguidor de líneas!
Bibliografía:
Sensores en robótica. [Página de internet]. http://www.todorobot.com.ar/documentos/sensores.pdf.
Consultada: 19/09/2010
Sistemas Mecánicos. [Página de internet] http://www.tecnosefarad.com/wp-
content/archivos/bach_1/mecanica/sistemas_mecanicos.pdf. Consultada 20 de julio de 2010
Automatización y robótica. Elementos motores, p.13. Disponible en:
http://blog.artegijon.com/toni/files/2007/11/motores.pdf. Consultado el 07-03-2010.

Figura 22. Pieza A.
Figura 23. Pieza B Figura 24. Pieza C

Figura 25. Pieza D Figura 26. Pieza E
Figura 27. Pieza G Figura 28. Pieza F


















