Geodesia Satelital Listo
98
INTEGRANTES: ATENCIO MONJE Juan Carlos CHÁVEZ SEGURA Jamerli GRANDA HINOSTROZA Carol LOARDO VACAS Lehi RARAZ JANAMPA Maireth Helen JOSE LUIS
-
Upload
jamerli-i-chavez-segura -
Category
Documents
-
view
268 -
download
4
description
uygvbhb
Transcript of Geodesia Satelital Listo
-
INTEGRANTES: ATENCIO MONJE Juan Carlos CHVEZ SEGURA Jamerli GRANDA HINOSTROZA Carol LOARDO VACAS Lehi RARAZ JANAMPA Maireth Helen JOSE LUIS
-
Geodesia, palabra derivada de la voz griega godaisia (geo, tierra; daien, dividir) de manera literal significa dividir la tierra. As, como un primer objetivo, la prctica de la geodesia debera suministrar un marco de referencia preciso para el control de levantamientos nacionales topogrficos.
El concepto bsico de Geodesia fue formulado en el siglo XIX, como la ciencia de la medicin y representacin de la superficie de la tierra.
En las primeras dcadas del siglo XX, consideraba la Geodesia como la ciencia que trata de las investigaciones de la forma y dimensiones de la superficie terrestre. Planteaba a su vez que los mtodos empleados para alcanzar estos propsitos eran:
a) la medicin de longitudes de arcos (meridianos, paralelos o arcos oblicuos) en la superficie de la tierra, combinada con la determinacin de las posiciones astronmicas de puntos en estos arcos.
b) la medicin de distancias en una red de tringulos cubriendo un rea, combinada igualmente con la determinacin de posiciones astronmicas.
c) la medicin de la fuerza de gravedad en diferentes partes de la superficie terrestre.
-
Sin embargo, los diferentes avances obtenidos, tanto tecnolgicos como cientficos, dieron lugar hace tres dcadas a la consideracin que el concepto desarrollado por Helmert no reflejaba el papel que la geodesia representaba en los tiempos actuales, exigiendo por tanto el planteamiento de una nueva definicin y alcance del concepto de geodesia. Slo hasta 1973, una definicin ms amplia fue presentada, considerando la Geodesia como la disciplina que trata con la medicin y representacin de la tierra, incluyendo su campo de gravedad terrestre, en un espacio tridimensional variante con el tiempo, la cual prcticamente an se conserva.
-
Por consiguiente, los principales propsitos de la Geodesia han sido resumidos en los siguientes:
Establecimiento y mantenimiento de redes de control geodsico tridimensional, nacional y global, reconociendo el tiempo como aspecto variante en dichas redes.
Medicin y representacin de fenmenos geodinmicas tales como movimiento polar, mareas terrestres, y movimientos de corteza.
Determinacin del campo de gravedad terrestre, incluyendo las variaciones temporales.
Determinacin de parmetros, similar a los geodsicos, para otros cuerpos del sistema solar.
Estas caractersticas implican el uso de matemticas aplicadas, que incluyen las observaciones que deben ser usadas para determinar el tamao y la forma de la tierra y la definicin de coordenadas tridimensionales, as como la variacin de fenmenos cerca o sobre la superficie, tales como la gravedad, mareas, rotacin terrestre, movimientos de corteza, y desviacin de la plomada, junto con las unidades de medicin y los mtodos de representacin de la superficie terrestre curva en una superficie plana.
-
El hombre, a travs de su historia, poco a poco ha ido incrementando su conocimiento acerca del planeta en que vive. Desde los tiempos de la antigedad, siempre ha estado interesado por conocer la forma exacta de la tierra. Durante muchos siglos, el nico camino para aprender acerca de la geometra de la tierra fue mediante observaciones de sol, luna, otros planetas y estrellas, surgiendo la astronoma. As, los primigenios desarrollos de la geodesia fueron a la par con los de la astronoma. Las observaciones acerca de los cambios en el tiempo de duracin de los das de luz, y los cambios en la altura del sol durante el ao, le permitieron poco a poco la formulacin de algunas explicaciones.
PRIMERAS FORMAS DE LA TIERRA
En la poca de los griegos, existieron diversas concepciones especulativas acerca de la forma de la tierra. Tales la consider como un disco flotando en un infinito ocano.
-
Anaximandro la consider como un cilindro con los ejes orientados en direccin oeste este.
-
Anaxmenes la consider como una tierra flotando en un ocano circunferencial infinito sostenido en el espacio por aire comprimido.
-
La escuela de Pitgoras fue la primera en considerar la tierra como una esfera, concepto que prevaleci durante muchos siglos; de hecho, la esfera fue considerada por los filsofos en ese entonces como el slido regular perfecto.
-
Eratstenes, filsofo griego considerado como el Padre de la Geodesia, dio un paso de gran significacin, al introducir la nocin de oblicuidad de los ejes de rotacin de la tierra y determinar el tamao de la tierra en funcin de las mediciones de latitud en Alejandra y Siena, con sorprendente precisin para la poca teniendo en cuenta los elementos empleados para obtener dichos clculos.
-
1. RAMAS:
GEODESIA SATELITAL
GEODESIA ESFEROIDAL
Estudia la forma y dimensiones de la tierra y el empleo del elipsoide como superficie de referencia
GEODESIA FSICA
Estudia el campo gravitatorio de la
tierra,
ASTRONOMA GEODSICA
tiene por objeto la determinacin de las coordenadas geogrficas astronmicas, Latitud y Longitud, de puntos de la superficie terrestre y de acimuts astronmicos A de direcciones en la Tierra
GEODESIA ESPACIAL O
CSMICA
Utiliza satlites artificiales para sus.
Tambin se la conoce como
geodesia espacial.
RAMAS El campo abarcado por la Geodesia es amplio, razn por la cual resulta dividirlo en distintas ramas:
-
Meridiano de origen de longitudes (Greenwich) PO'P'. El meridiano de origen es un plano arbitrario que contiene al eje de rotacin terrestre. En la cartografa espaola antigua se tomaba el meridiano de Madrid. Actualmente se toma el que pasa por Greenwich, existiendo una diferencia entre ellos de 3 41' 15".
Plano ecuatorial: EO'E' El Ecuador es un plano perpendicular al eje de rotacin de la Tierra, pasando por el centro de gravedad de la misma.
-
Latitud geodsica:
Longitud geodsica
-
LEVANTAMIENTOS GEODESICOS
Se entiende por levantamiento geodsico la toma de informacin de distancias y ngulos en el campo, y la aplicacin de los principios de la Geometra y la Trigonometra con el propsito de determinar la forma, dimensiones y posicin de grandes extensiones terrestres. En ese sentido, se deben clasificar los levantamientos geodsicos en dos grandes grupos: horizontal y vertical.
-
Triangulacin: Es el tipo de levantamiento geodsico ms tradicional y conocido. Difiere de los levantamientos topogrficos en que usa instrumentos ms precisos. Los errores instrumentales son removidos o predeterminados de modo que puedan compensarse al momento de los clculos; los errores observacionales se reducen empleando procedimientos muy rigurosos. Otra diferencia muy importante es que todas las posiciones establecidas por triangulacin estn relacionadas entre s matemticamente.
Bsicamente, una triangulacin consiste en medir los ngulos de una serie de tringulos. El principio de la triangulacin se basa en procedimientos trigonomtricos simples: si la distancia de un lado de un tringulo y los ngulos extremos del lado son medidos con exactitud, pueden calcularse los otros dos lados y el ngulo restante.
-
Trilateracin: El avance en precisin y alcance de los sistemas electrnicos de medicin de distancias IEMD - se ha aplicado para levantamientos geodsicos usando la tcnica de trilateracin. Los sistemas electrnicos permiten la medicin de distancias mayores a 5 y ms kilmetros, con lo que las redes de triangulacin geodsicas pueden extenderse rpidamente. Las tcnicas de trilateracin permiten la conexin de levantamientos en islas o en continentes separados por grandes ocanos.
En trilateracin slo se miden distancias, y se hacen observaciones redundantes para asegurar una buena precisin. Se ajusta la red para eliminar las discrepancias, luego se calculan los ngulos de tal modo que las posiciones geodsicas se puedan obtener en forma similar al mtodo de triangulacin.
-
Poligonacin: La poligonacin es el mtodo ms simple para extender control. El sistema es similar al de la navegacin, en el que se miden distancias y direcciones. En una poligonacin, se inicia el levantamiento en un punto con posicin y azimut con respecto a otro punto conocido, y se miden ngulos y distancias a travs de la serie de puntos intermedios del levantamiento. Las mediciones angulares sirven para calcular la direccin de cada lnea. Las mediciones de distancia completan la informacin para determinar la posicin de los puntos de la poligonal.
-
Levantamiento astronmico:
La posicin de un punto puede obtenerse directamente observando las estrellas. El posicionamiento astronmico es el mtodo de posicionamiento ms antiguo. Ha sido usado por muchos aos por los marineros con propsitos de navegacin. Tambin los exploradores han usado frecuentemente este mtodo para orientarse en reas sin apoyo cartogrfico.
-
Es el proceso para determinar alturas (elevaciones) sobre el nivel medio del mar. En posicionamiento terrestre con fines cartogrficos no hay problema en el hecho de que las posiciones horizontales estn referidas al elipsoide, y las elevaciones referidas al geoide. Sin embargo la informacin geodsica de precisin requiere un ajuste en la informacin vertical que compense por las ondulaciones del geoide, por encima o por debajo del elipsoide, la superficie matemtica regular. El ajuste usa tcnicas geodsicas avanzadas y complejas.
La red bsica de control vertical se establece usando nivelaciones geodsicas. La densificacin se realiza por mtodos suplementarios. El nivel medio del mar se usa como referencia (datum vertical) en todos los mtodos. Este nivel se determina obteniendo el promedio horario de las variaciones del agua durante un ao o ms en una estacin mareogrfica. Existen varias tcnicas de nivelacin: geomtrica o diferencial, trigonomtrica y baromtrica, y cada una genera precisiones diferentes, siendo la primera de las citadas, la ms precisa de las tres.
-
NIVELACIN GEOMTRICA: Con el instrumento puesto en estacin se hacen lecturas en dos miras calibradas, en posicin vertical, colocadas atrs y adelante del instrumento. La diferencia de lecturas es la diferencia en elevacin entre los puntos donde estn las miras. El instrumento ptimo usado para la nivelacin consta de un nivel de burbuja que se ajusta en posicin paralela al geoide. Cuando el instrumento est bien centrado en un punto, el telescopio tiene una posicin horizontal (nivel) de modo que puede rotar 360 libremente. En toda lnea de nivelacin debe conocerse la elevacin exacta de cuando menos un punto de ella para poder determinar las elevaciones de los puntos restantes.
-
Consiste en medir un ngulo vertical desde una distancia conocida utilizando un teodolito, calculando la elevacin del punto. Con este mtodo se pueden hacer mediciones verticales al mismo tiempo que se hacen las mediciones de los ngulos horizontales de una triangulacin. Es un mtodo ms econmico pero menos preciso que la nivelacin geomtrica. Con frecuencia es el nico mtodo para establecer control vertical preciso en reas montaosas.
-
Se determinan diferencias de altura midiendo las diferencias de presin atmosfrica en varios puntos. La presin del aire se mide con barmetros de mercurio o aneroides, o con un termmetro con punto de vapor. Aunque el grado de precisin posible con este mtodo no es tan grande como en los otros dos, es el mtodo con el que se pueden obtener rpidamente alturas relativas de puntos muy distantes entre s. Este mtodo se usa ampliamente en levantamientos de reconocimiento o exploratorio, donde se harn ms tarde levantamientos de mayor precisin o no se requieran stos.
Con el surgimiento de la geodesia satelital con GPS, se efectan lecturas que le permiten establecer las alturas de los puntos referidas a un sistema especfico de referencia (geoide). Tambin se puede, a partir de lecturas sobre puntos de elevacin conocida, hacer las respectivas conexiones.
-
El trmino cartografa tiene muchas y diversas acepciones, Una de las acepciones ms importantes del trmino cartografa la defini la Asociacin Cartogrfica Internacional en 1.966
Conjunto de estudios y de operaciones cientficas, artsticas y tcnicas que, a partir de los resultados de observaciones directas o de la explotacin de una documentacin, intervienen en la elaboracin, anlisis y utilizacin de cartas, planos, mapas, modelos en relieve y otros medios de expresin, que representan La Tierra, parte de ella o cualquier parte del Universo.
Las distintas acepciones del trmino cartografa tienen en comn su relacin con el conjunto de conocimientos cientficos y operaciones tcnicas que intervienen en el proceso de elaboracin de mapas.
-
La cartografa tiene por objeto la concepcin, preparacin, redaccin y realizacin de los mapas; incluye todas las operaciones necesarias, desde el levantamiento sobre el terreno o la recogida de informacin escrita, hasta la impresin definitiva y la difusin del documento cartogrfico ( Joly, F. 1.976)
-
LA ERA PREHISTRICA
MUNDO CLSICO EDAD MEDIA
RENACIMIENTO SIGLOS XVIII, XIX Y MITAD
DEL XX
DESDE LA MITAD DEL XX
la historia de la cartografa, la evolucin y desarrollo de la cartografa ha estado ntimamente relacionado con la evolucin de las ciencias y las tecnologas a lo largo de la historia.
-
LA ERA PREHISTRICA
Las antiguas civilizaciones de Mesopotamia y Egipto utilizaban a su modo y medios la cartografa.
Figura 2.1. Tablilla de arcilla de 1.500 a.C., representando a escala elementos de la ciudad sopotmica de Nippur.
MUNDO CLSICO
La poca clsica de Grecia contribuy con el auge de las ciencias al desarrollo de los principios tericos de la cartografa. La esfericidad de La Tierra y primeras mediciones del radio terrestre.
-
El pueblo romano utiliz conocimientos de cartografa para su uso, sin embargo su desarroll fue escaso.
Figura 2.2. Modelos de mapa-mundi desarrollados en los XIII al XV basados en los conocimientos de Ptolomeo.
-
EDAD MEDIA La Edad Media supuso en Europa una parada del desarrollo de todas las ciencias, incluida la cartografa, desarrollando mapas ms decorativos y religiosos que prcticos. No obstante los navegantes y marineros necesitaban mapas o cartas nuticas para sus viajes, cartografa que ellos mismos se preparaban. Cartas portulanas.
Figura 2.4. Mapa del Siglo XIV
-
RENACIMIENTO Con el Renacimiento se recuperan las humanidades del mundo clsico heredadas de los rabes y comienza un auge espectacular por el desarrollo de todas las ciencias. Se producen en esta poca el desarrollo de importantes avances cientficos y tecnolgicos (por ej. sistemas de proyeccin, la imprenta, tiles de navegacin, etc.) que junto con los nuevos descubrimientos promovidos por el nuevo cuadro poltico del mundo conocido elevan hasta el ms alto pedestal el desarrollo de la cartografa.
Figura 2.5. Mapa-mundi de Mercator editado en el 1.569 realizado segn su famoso sistema de proyeccin.
-
SIGLOS XVIII, XIX Y MITAD DEL XX
Los siglos XVIII y XIX estn llenos de nuevos descubrimientos de las ciencias y tecnologas que sin duda colaboraron al desarrollo de la cartografa. Mencin especial merecen el desarrollo de la fotogrametra y la litografa. Fue en esta poca cuando florecen innumerables organismos privados y pblicos con el objetivo de desarrollar la investigacin y ms particularmente la cartografa. Se realiza el levantamiento topogrfico de mltiples piases, a lo que contribuy sin duda alguna, el desarrollo de la ptica y los aparatos topogrficos.
DESDE LA MITAD DEL XX
El siglo XX comenz con una grave guerra, la I Guerra Mundial, que puso en evidencia las carencias cartogrficas de las distintas naciones a nivel internacional. Con la llegada de la II Guerra Mundial los problemas cartogrficos se continan produciendo. Se adopta internacionalmente el sistema de proyeccin UTM y el meridiano cero en Greenwich.
-
BSICAMENTE LA LOCALIZACIN
GEOGRFICA DE UN PUNTO SE PUEDE
REALIZAR DETALLANDO UNO DE ESTOS PARMETROS
Coordenadas geogrficas en forma Longitud-Latitud.
Coordenadas (x, y) UTM. Universal Transversal Mercator.
-
Las Coordenadas Geogrficas son una forma de designar un punto sobre la superficie terrestre con el siguiente formato:
31426 W 425221N
Esta designacin supone la creacin de un sistema de referencia de tres dimensiones
-
MERIDIANOS
Se definen los meridianos como las lneas de interseccin con la superficie terrestre, de los infinitos planos que contiene el eje de la tierra.
-
PARALELOS
Se definen los paralelos como las lneas de interseccin de los infinitos planos perpendiculares al eje terrestre con la superficie de la tierra.
-
Una vez que tenemos establecida una red de meridianos y paralelos, la situacin geogrfica de un punto viene definida por su longitud y su latitud, con referencia a la red creada:
LONGITUD
Se define la longitud ( ) de un punto P como el valor del diedro formado por el plano meridiano que pasa por P y el meridiano origen, (0 Meridiano de Greenwich). La longitud es grficamente el ngulo formado por OAB: = OAB
-
LATITUD
Se denomina Latitud geogrfica () de un punto P al ngulo formado por la vertical a la tierra que pasa por dicho punto con el plano ecuador. La vertical se considera la unin del punto con el origen o centro de la tierra, obtenindose la latitud midiendo el ngulo () sobre el meridiano que pasa por el punto P.
= OAP
-
Este sistema de designacin tiene los siguientes orgenes para la latitud y longitud.
-
Dado el siguiente croquis se designa un punto P sobre la superficie terrestre.
Al designar las coordenadas de un punto, primero se indica la latitud y despus la longitud.
El punto P representado en la figura anterior tiene de coordenadas geogrficas: = 710327 E = 422130 N Longitud referida el meridiano GREENWICH.
-
La representacin cartogrfica del globo terrestre, ya sea considerado este como una esfera o un elipsoide, supone un problema, ya que no existe modo alguno de representar toda la superficie desarrollada sin deformarla e incluso de llegar a representarla fielmente, ya que la superficie de una esfera no es desarrollable en su conversin a un soporte papel (a una representacin plana).
-
Cuando la superficie a representar es pequea y por lo tanto la esfericidad terrestre no va a influir en la representacin cartogrfica, por ejemplo en pequeos levantamientos topogrficos, se recurre a su representacin de forma plana, de forma que todos los puntos representados estn vistos desde su perpendicularidad.
-
Las proyecciones geodsicas son proyecciones en las que la esfericidad terrestre tiene repercusin importante sobre la representacin de posiciones geogrficas, sus superficies, sus ngulos y sus distancias.
La proyeccin UTM conserva, por lo tanto, los ngulos pero distorsiona todas las superficies sobre los objetos originales as como las distancias existentes. La proyeccin UTM est dentro de las llamadas proyecciones cilndricas, por emplear un cilindro situado en una determinada posicin espacial para proyectar las situaciones geogrficas. El sistema de proyeccin UTM toma como base la proyeccin MERCATOR. Este es un sistema que emplea un cilindro situado de forma tangente al elipsoide en el ecuador.
-
La proyeccin TRANSVEERSAL
MERCATOR (UTM), toma como base la
proyeccin Mercator, sin embargo la posicin del cilindro de proyeccin es transversal respecto del
eje de la tierra:
-
El sistema de Proyeccin UTM tiene las siguientes ventajas frente a otros sistemas de proyeccin: Conserva los ngulos No distorsiona las superficies en grandes magnitudes, (por debajo
de los 80 de Latitud). Es un sistema que designa un punto o zona de manera concreta y
fcil de localizar. Es un sistema empleado en todo el mundo, empleo universal,
fundamentalmente por su uso militar.
El sistema localiza un punto por coordenadas del tipo: x = 462.130 y = 4.634.140
-
nicamente con estos datos el punto no queda definido ya que carece de los siguientes datos: Los datos no tienen unidades Los datos no localizan el hemisferio donde se encuentra Los datos no localizan el Huso UTM de proyeccin Los datos no localizan el Datum (origen del sistema de coordenadas)
Para que el punto quede localizado perfectamente se debe de detallar como sigue: X = 462.130 m Y = 4.634.140 m Huso = 30 Zona = T Datum: European 50 (ED50)
-
La designacin de coordenadas UTM se puede realizar de distintas maneras: X = 386.143 m Y = 4.560.137 m Huso 30 zona T Datum: ED50 O bien: Este (easting) = 386.143 m Norte (northing) = 4.560.137 m Huso 30 zona T Datum: ED50
Designacin de la cuadrcula El formato de designacin de la cuadrcula depende de la resolucin con que se encuentran las coordenadas UTM. Para una resolucin de 1 metro es el siguiente:
-
Para la resolucin de un kilmetro:
-
La coordenada anteriormente designada en este sistema sera: X = 386.143 m Y = 4560.137 m Huso 30 zona T Datum: ED50 3OT 3861434560137 Datum: ED50 Ntese que en la designacin de la coordenada tiene (n) dgitos en la coordenada Norte Y, y (n-1) dgitos en la coordenada Este X.
-
Es un conjunto de coordenadas espacio-tiempo que se requiere para poder determinar la posicin de un punto en el espacio, en cuyo origen se encuentra situado un observador con relacin al cual se determina la posicin de diferentes puntos.
Es un recurso matemtico que permite definir la forma y dimensiones de la tierra, asi como el origen y orientacin de los sistemas de coordenadas.
Es una terna de ejes cartesianos ortogonales X, Y, Z, cuyo origen O se encuentra ubicado en el centro geomtrico del elipsoide de representacin matemtica de la tierra.
Como sabemos la tierra se encuentra ligeramente achatada en los polos y ligeramente ensanchada en el ecuador y la forma matemtica que mejor la representa es la del elipsoide de revolucin. Asi, la tierra quedara representada por un elipsoide de revolucin de determinada forma y dimensiones, y los puntos del terreno estarn referenciados ya sea por coordenadas cartesianas ortogonales XYZ o por coordenadas geogrficas elipsoidales , , h.
-
SISTEMA DE REFERENCIA GEODESICOS
SISTEMA LOCALES
SISTEMA TERRESTRES
SISTEMA GEOCENTRICOS
SISTEMA DE REFERENCIA MUNDIALES
El Estndard Earth 1966. El sistema de referencia NWL-9D
(1970) Los sistemas de referencia WGS
(World Geodetic System) . El sistema de referencia terrestre
internacional (ITRS) de 1988.
-
OTROS SISTEMAS DE REFERENCIA
ED 50, datum europeo 1950. ETR 89, sistema de referencia terrestre europeo 1989. NAD 83, datum estadounidense 1983. PSAD 56, datum provisional sudamericano 1956. SIRGAS, sistema de referencia geocntrico para las
amricas.
-
ELIPSOIDE DE REVOLUCIN: Es la figura geomtrica generada por la rotacin de un elipse alrededor de su eje (P, P). Ya que esta se aproxima ms a la forma de la tierra porque es achatada en los polos y abultada cerca del ecuador
GEOIDE: Es una figura cuya forma es la de una superficie equipotencial. Es decir en donde la gravedad terrestre es la misma en cada uno de los puntos que la forman y esta gravedad es perpendicular al geoide. Esta superficie presenta irregularidades a diferencia del elipsoide como podemos observar en el grfico.
-
DATUM: Es un conjunto de puntos de referencia en la superficie terrestre en base a los cuales las medidas de la posicin son tomadas. Son puntos de coincidencia del geoide con el elipsoide. Es la superficie de referencia para el clculo y determinacin de coordenadas, establecindose unos datos iniciales de los cuales se derivan el resto. Se considera dos tipos de Datums: Datums locales (horizontal y vertical) y datum satelital. Datum local horizontal: Es cuando los puntos son lo ms tangentes posibles a una determinada regin o continente. Permite la determinacin de la longitud y latitud. Se elige un punto en el cual la superficie del elipsoide de referencia y del geoide sean tangentes
Datum local vertical: es la superficie de referencia que permite el clculo de las alturas y por tanto esa superficie de altura nula. Actualmente la superficie adoptada como datum vertical es el nivel medio del mar.
Datum Satelital: Los datums satelitales son geocntricos y se les llama los elipsoides GPS: Word Geodetic System 1960 (WGS60) Word Geodetic System 1966 (WGS66) Word Geodetic System 1973 (WGS72) Word Geodetic System 1984 (WGS84). Llamado tambin Elipsoide GPS Actualmente el Datum con el cual trabaja el Per en las cartas nacionales 1/100000 es el WGS84.
-
DATUM
DATUM LOCAL VERTICAL
DATUM LOCAL HORIZONTAL
-
TRANSFORMACIN DE COORDENADAS DEL SISTEMA WGS-84, AL SISTEMA LOCAL SAD-56. Transformacin de Helmert: .
El modelo matemtico de esta transformacin, expresa la relacin entre dos sistemas de referencia por medio de tres traslaciones, tres rotaciones y un factor de escala, segn la siguiente expresin:
-
i=ro+.R.ri
Dnde: [X, Y, Z] es el vector de coordenadas calculadas al
sistema WGS 84; [0, 0, 0] es el vector de los parmetros de
traslacin; (1+) es el factor de escala; ( , , ) Son los parmetros de rotacin; [x, y, z] es el vector de coordenadas en PSAD56.
-
EJEMPLO DE TRANSFORMACIN DEL SISTEMA WGS 84 AL SISTEMA PSAD 56
-
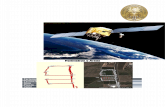
El sistema global de navegacin por satlite (GNSS) permite determinar en todo el mundo la posicin de un objeto, una persona o un vehculo con una precisin hasta de centmetros (si se utiliza GPS diferencial), aunque lo habitual son unos pocos metros de precisin. El sistema fue desarrollado, instalado y empleado por el Departamento de Defensa de los Estados Unidos.
El GPS funciona mediante una red de 24 satlites en rbita sobre el planeta tierra, a 20.200 km, con trayectorias sincronizadas para cubrir toda la superficie de La Tierra. Cuando se desea determinar la posicin, el receptor que se utiliza para ello localiza automticamente como mnimo tres satlites de la red, de los que recibe unas seales indicando la identificacin y la hora del reloj de cada uno de ellos. Con base en estas seales, el aparato sincroniza el reloj del GPS y calcula el tiempo que tardan en llegar las seales al equipo, y de tal modo mide la distancia al satlite mediante "triangulacin" (mtodo de trilateracin inversa), la cual se basa en determinar la distancia de cada satlite respecto al punto de medicin. Conocidas las distancias, se determina fcilmente la propia posicin relativa respecto a los tres satlites. Conociendo adems las coordenadas o posicin de cada uno de ellos por la seal que emiten, se obtiene la posicin absoluta o coordenada real del punto de medicin. Tambin se consigue una exactitud extrema en el reloj del GPS, similar a la de los relojes atmicos que llevan a bordo cada uno de los satlites. A mayor nmero de satlites "visibles" por el aparato, ms precisos son los clculos. Con sucesivas posiciones el receptor puede suministrarnos otros datos derivados, como nuestra posicin exacta y relativa, la velocidad de navegacin o desplazamiento, cmo debemos cambiar el rumbo para llegar a nuestro destino y otras opciones.
-
En 1957, la Unin Sovitica lanz al espacio el satlite Sputnik I, que era monitorizado mediante la observacin del efecto Doppler de la seal que transmita. Debido a este hecho se comenz a pensar que, de igual modo, la posicin de un observador podra ser establecida mediante el estudio de la frecuencia Doppler de una seal transmitida por un satlite cuya rbita estuviera determinada con precisin.
La armada estadounidense rpidamente aplic esta tecnologa, para proveer a los sistemas de navegacin de sus flotas de observaciones de posiciones actualizadas y precisas. As surgi el sistema TRANSIT, que qued operativo en 1964, y hacia 1967 estuvo disponible, adems, para uso comercial.
Las actualizaciones de posicin, en ese entonces, se encontraban disponibles cada 40 minutos y el observador deba permanecer casi esttico para poder obtener informacin adecuada. Posteriormente, en esa misma dcada y gracias al desarrollo de los relojes atmicos, se dise una constelacin de satlites, portando cada uno de ellos uno de estos relojes y estando todos sincronizados con base en una referencia de tiempo determinado.
En 1973 se combinaron los programas de la Armada y el de la Fuerza Area de los Estados Unidos (este ltimo consistente en una tcnica de transmisin codificada que provea datos precisos usando una seal modulada con un cdigo de PRN (Pseudo-Random Noise: ruido pseudo-aleatorio), en lo que se conoci como Navigation Technology Program (programa de tecnologa de navegacin), posteriormente renombrado como NAVSTAR GPS.
Entre 1978 y 1985 se desarrollaron y lanzaron once satlites prototipo experimentales NAVSTAR, a los que siguieron otras generaciones de satlites, hasta completar la constelacin actual, a la que se declar con capacidad operacional inicial en diciembre de 1993 y con capacidad operacional total en abril de 1995. En 2009, este pas ofreci el servicio normalizado de determinacin de la posicin para apoyar las necesidades de la OACI, y sta acept el ofrecimiento.
-
Los receptores GPS reciben la informacin precisa de la hora y la posicin del satlite. Exactamente, recibe dos tipos de datos, los datos del Almanaque, que consiste en una serie de parmetros generales sobre la ubicacin y la operatividad de cada satlite con relacin al resto de satlites de la red, esta informacin puede ser recibida desde cualquier satlite, y una vez el receptor GPS tiene la informacin del ltimo Almanaque recibido y la hora precisa, sabe dnde buscar los satlites en el espacio; La otra serie de datos, tambin conocida como Efemrides, hace referencia a los datos precisos, nicamente, del satlite que est siendo captado por el receptor GPS, son parmetros orbitales exclusivos de ese satlite y se utilizan para calcular la distancia exacta del receptor al satlite. Cuando el receptor ha captado la seal de, al menos, tres satlites calcula su propia posicin en la Tierra mediante la triangulacin de la posicin de los satlites captados, Modulo GPS ACE II de 8 canales para integracin de sistemas, Tecnologa TRIMBLE ASIC de sexta generacin que proporciona inmejorables prestaciones. El nuevo receptor GPS en miniatura ACE II para integracin de sistemas incorpora la ms moderna y poderosa arquitectura de 8 canales en el formato ms popular del mercado (8.25cm x 4.65cm x 1.45 cm). Diseado especficamente para aquellas aplicaciones que requieran altas prestaciones a bajo costo, l modulo ACE II GPS proporciona fiables datos de posicin GPS para navegacin, seguimiento, almacenamiento o sincronizacin, La rpida adiccin de las seales GPS y su bajo consumo hacen del mdulo ACE II GPS el ideal para aplicaciones mviles o alimentadas mediante bateras. Adems l modulo ACE II GPS es el reemplazo directo de la popularsima tarjeta SV6 CM3 permitiendo una actualizacin a la tecnologa de 8 canales rpida y econmica. La flexibilidad y la fcil integracin estn aseguradas con los dos puertos I/O absolutamente configurables por el usuario y la integracin de los tres protocolos de comunicaciones ms populares del mercado (TSIP/TAIP/NMEA) de los cuales pueden estar activos dos de ellos de manera simultnea, incluso mientras se reciben correcciones diferenciales RTCM para una precisin de las posiciones de 2 metros. Trimble ofrece una seleccin de antenas activas de alta sensibilidad y rechazo al ruido para el uso con el nuevo mdulo ACE II GPS, incluyendo la miniatura con montaje magntico, la de montaje fijo para vehculos o bastones topogrficos. En cualquier caso l modulo ACE II GPS informa acerca del estado de la antena para asegurar una operatividad sin problemas.
-
Debido al carcter militar del sistema GPS, el Departamento de Defensa de los EE. UU. Se reservaba la posibilidad de incluir un cierto grado de error aleatorio, que poda variar de los 15 a los 100 m. La llamada disponibilidad selectiva (S/A) fue eliminada el 2 de mayo de 2000. Aunque actualmente no aplique tal error inducido, la precisin intrnseca del sistema GPS depende del nmero de satlites visibles en un momento y posicin determinados. Con un elevado nmero de satlites siendo captados (7, 8 9 satlites), y si stos tienen una geometra adecuada (estn dispersos), pueden obtenerse precisiones inferiores a 2,5 metros en el 95% del tiempo. Si se activa el sistema DGPS llamado SBAS (WAAS-EGNOS-MSAS), la precisin mejora siendo inferior a un metro en el 97% de los casos. Estos sistemas SBAS no se aplican en Sudamrica, ya que esa zona no cuenta con este tipo de satlites geoestacionarios. La funcionabilidad de los satlites es por medio de triangulacin de posiciones para brindar la posicin exacta de los celulares, vehculos, etc.
-
La posicin calculada por un receptor GPS requiere en el instante actual, la posicin del satlite y el retraso medido de la seal recibida. La precisin es dependiente de la posicin y el retraso de la seal. Al introducir el atraso, el receptor compara una serie de bits (unidad binaria) recibida del satlite con una versin interna. Cuando se comparan los lmites de la serie, las electrnicas pueden meter la diferencia a 1% de un tiempo BIT, o aproximadamente 10 nanosegundos por el cdigo C/A. Desde entonces las seales GPS se propagan a la velocidad de luz, que representa un error de 3 metros. Este es el error mnimo posible usando solamente la seal GPS C/A. La precisin de la posicin se mejora con una seal P (Y). Al presumir la misma precisin de 1% de tiempo BIT, la seal P (Y) (alta frecuencia) resulta en una precisin de ms o menos 30 centmetros. Los errores en las electrnicas son una de las varias razones que perjudican la precisin (ver la tabla). Puede tambin mejorarse la precisin, incluso de los receptores GPS estndares (no militares) mediante software y tcnicas de tiempo real. Esto ha sido puesto a prueba sobre un sistema global de navegacin satelital (GNSS) como es el NAVSTAR-GPS. La propuesta se bas en el desarrollo de un sistema de posicionamiento relativo de precisin dotado de receptores de bajo costo. La contribucin se dio por el desarrollo de una metodologa y tcnicas para el tratamiento de informacin que proviene de los receptores.
FUENTE EFECTO
Ionosfera 3 m
Efemrides 2,5 m
Reloj satelital 2 m
Distorsin multibandas
1 m
Troposfera 0,5 m
Errores numricos
1 m o menos
-
El DGPS (Differential GPS), o GPS diferencial, es un sistema que proporciona a los receptores de GPS correcciones de los datos recibidos de los satlites GPS, con el fin de proporcionar una mayor precisin en la posicin calculada. Se concibi fundamentalmente debido la introduccin de la disponibilidad selectiva (SA).
El fundamento radica en el hecho de que los errores producidos por el sistema GPS afectan por igual (o de forma muy similar) a los receptores situados prximos entre s. Los errores estn fuertemente correlacionados en los receptores prximos. Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posicin basndose en otras tcnicas, recibe la posicin dada por el sistema GPS, y puede calcular los errores producidos por el sistema GPS, comparndola con la suya, conocida de antemano. Este receptor transmite la correccin de errores a los receptores prximos a l, y as estos pueden, a su vez, corregir tambin los errores producidos por el sistema dentro del rea de cobertura de transmisin de seales del equipo GPS de referencia.
-
Actualmente dentro del mercado de la telefona mvil la tendencia es la de integrar, por parte de los fabricantes, la tecnologa GPS dentro de sus dispositivos. El uso y masificacin del GPS est particularmente extendido en los telfonos mviles Smartphone, lo que ha hecho surgir todo un ecosistema de software para este tipo de dispositivos, as como nuevos modelos de negocios que van desde el uso del terminal mvil para la navegacin tradicional punto-a-punto hasta la prestacin de los llamados Servicios Basados en la Localizacin (LBS).
Un buen ejemplo del uso del GPS en la telefona mvil son las aplicaciones que permiten conocer la posicin de amigos cercanos sobre un mapa base. Para ello basta con tener la aplicacin respectiva para la plataforma deseada (Android, Bada, IOS, WP, Symbian) y permitir ser localizado por otros.
-
GLONASS (acrnimo en ruso: , Global'naya Navigatsionnaya Sputnikovaya Sistema) es un Sistema Global de Navegacin por Satlite (GNSS) desarrollado por la Unin Sovitica, siendo hoy administrado por la Federacin Rusa y que representa la contraparte del GPS estadounidense y del futuro Galileo europeo.
Consta de una constelacin de 31 satlites (24 en activo, 3 satlites de repuesto, 2 en mantenimiento, uno en servicio y uno en pruebas) situados en tres planos orbitales con 8 satlites cada uno y siguiendo una rbita inclinada de 64,8 con un radio de 25.510 km. La constelacin de GLONASS se mueve en rbita alrededor de la Tierra con una altitud de 19.100 km (diecinueve mil cien kilmetros) algo ms bajo que el GPS (20.200
-
Los tres primeros satlites fueron colocados en rbita en octubre de 1982. El sistema fue pensado para ser funcional en el ao 1991, pero la constelacin no fue terminada hasta diciembre de 1995 y comenz a ser operativo el 18 de enero de 1996. Ese mismo ao la ya Federacin Rusa ofreci el canal de exactitud normalizada (CSA) del GLONASS para apoyar las necesidades de la Organizacin de Aviacin Civil Internacional OACI, y sta acept el ofrecimiento. GLONASS utiliz inicialmente el sistema geodsico ruso PZ-90 que era sensiblemente diferente del sistema WGS 84; y como los parmetros de transformacin entre los dos sistemas de referencia no se conoce con precisin, era necesario prestar atencin a los sistemas a los que se refiere. En septiembre de 2007, el sistema fue adaptado y actualizado. Llamado PZ-90.02, est de acuerdo con el sistema ITRF2000, que se ajusta como WGS 84. La situacin econmica de Rusia en los aos 90 supuso que en abril de 2002 slo 8 satlites estuvieran completamente operativos. En 2004, 11 satlites se encontraban en pleno funcionamiento. A finales de 2007 son 19 los satlites operativos. Son necesarios 18 satlites para dar servicio a todo el territorio ruso y 24 para poder estar disponible el sistema en todo el mundo. En 2007, Rusia anuncia que a partir de ese ao se eliminan todas las restricciones de precisin en el uso de GLONASS, permitiendo as un uso comercial ilimitado. Hasta ahora las restricciones de precisin para usos civiles eran de 30 metros. La aparicin en el mercado de receptores que permiten recibir seales pertenecientes a los dos sistemas GLONASS y GPS (con sistemas de referencia diferentes) hace interesante las posibilidades de GLONASS en la medicin como apoyo al GPS norteamericano.
-
En agosto de 2001, el gobierno de la Federacin Rusa adopt un programa especial federal a largo plazo por 10 aos. Los principales objetivos del programa son: Restablecer el segmento orbital del sistema GLONASS a 24 satlites para el perodo 2007-2008; Modernizar los satlites de navegacin, comenzando con la segunda generacin de satlites
(GLONASS-M) que tienen ms prestaciones y una vida til que se ha elevado a siete aos. Se incorpora en estos satlites la seal L2 en 2005.
Despus de 2007 (se prev completar la constelacin en 2012), remplazar gradualmente los satlites con los de la tercera generacin(GLONASS-K) que, junto con unas mejores prestaciones y una vida til de 10 a 12 aos, tendrn la posibilidad de emitir la seal de navegacin en la frecuencia L3 (adems de L1 y L2) por la banda de radionavegacin aeronutica.
Proveer al GLONASS con capacidades de Bsqueda y Salvamento (SAR) a partir de GLONASS-Km de manera similar al sistema COSPASSARSAT.
Los satlites de segunda generacin GLONASS-M, adems incorporar la nueva seal civil L2 (mejorando con esto la exactitud y fiabilidad de la navegacin y mejora la inmunidad frente a interferencias en el receptor para uso civil), posee radioenlaces entre satlites para realizar el control en lnea de la integridad del sistema y aumentar la duracin de la operacin autnoma de la constelacin de satlites sin prdida de la exactitud de navegacin. Los satlites de tercera generacin GLONASS-K tendrn parmetros de tamao y masa considerablemente mejores. Su peso no exceder de 700 kg, lo que permitir lanzar estos satlites empleando el cohete de lanzamiento Protn con seis satlites en un solo lanzamiento; a su vez, esto permitir restablecer el segmento orbital en un corto perodo y el cohete de lanzamiento Soyuz, con dos satlites en un lanzamiento, permitir mantener el segmento orbital en el futuro. Estas capacidades permitirn reducir varias veces los costos de despliegue y mantenimiento del segmento orbital del sistema GLONASS. El programa prev tambin realizar tareas de investigacin cientfica y de diseo experimental para el desarrollo de la nueva generacin de satlites, a fin de modernizar el complejo de control de tierra del sistema GLONASS y para iniciar la produccin de equipo de usuario, aumentaciones y un sistema de vigilancia del estado del segmento orbital. El uso del sistema GLONASS con otros GNSS permitir aumentar considerablemente las prestaciones de los Sistemas de Navegacin por Satlite: la precisin, el acceso, la integridad y continuidad de los servicios de navegacin para los usuarios de la aviacin. El 30 de marzo de 2013, el estado de la constelacin de GLONASS era:
Total de satlites en constelacin
29 SC
Operacionales 24 SC
En mantenimiento 1 SC
En reserva 3 SC
En test 1 SC
-
GLONASS y GPS son distintos, pero trabajan en conjunto para poder conseguir posicionarte de manera ms rpida en el lugar donde te encuentres. Tal como lo explic la gente de Qualcomm cuando justificaron su implementacin en chips S2, S3 y S4, existen 27 satlites GPS orbitando alrededor del planeta, y hay lugares y momentos en que -- simplemente -- no existe factibilidad de conseguir que 3 de ellos te ubiquen. No hablamos de lugares recnditos e inhabitados, sino de grandes urbes con edificios altos y muchos puntos ciegos que impiden al telfono tener un tiro limpio para comunicarse con los satlites que corresponda. A quin no le ha pasado? Rusia se ha encargado de poner sus satlites GLONASS en rbita y evolucionar su constelacin de forma consistente durante los ltimos aos, y los fabricantes de chips para mviles se han encargado de conseguir que ambas tecnologas se complementen y logren encontrarte ms rpido. La mayora de los telfonos tiene al sistema ruso como respaldo en caso de no ser exitosa la exploracin con GPS, por lo que no tendrs que preocuparte en demasa por el aumento en el consumo de energa debido a su funcionamiento. Pero cuando lo est, consigue encontrarte con un mnimo margen de error de 2 metros. No es esto genial y espeluznante al mismo tiempo acaso, tomando en cuenta que llevamos el mvil a todos lados?. El primer telfono con soporte para GLONASS fue lanzado a fines de 2010 en Rusia, y el propio Vladimir Putin -- Primer Ministro del pas -- fue el encargado de mostrarlo para la prensa. En el fondo, era un telfono fabricado por ZTE para este fin. Ahora, la pregunta cae de cajn... Por qu necesitamos telfonos con un sensor de geoposicin ms? Bueno, porque muchas veces el GPS no es suficiente, su margen de error es alto para los estndares que exige el mercado y en muchos lugares del planeta resulta ser lento y hasta inexistente. Y desde esta premisa surge la necesidad de complementar la informacin satelital recibida por estos canales "convencionales", buscando forma ms eficiente y rpida de conseguir ubicarnos en un punto del mapa. Dado que ya se vena integrando a una serie de otros aparatos de uso profesional, surge la idea -- y necesidad -- de incorporarlo a uno de los aparatos ms usados en el mundo: El mvil. Con el nombre inicial de NAVSTAR (Navigation System with Timing And Ranging), GPS (Global Positioning System - Sistema de posicionamiento global) fue desarrollado por el Departamnto de Defensa de los Estados Unidos para proporcional de capacidades de navegacin en cualquier punto del planeta para el ejrcito. Desde su implementacin GPS se ha convertido en parte fundamental de muchas aplicaciones civiles en todo el mundo, incluido el uso recreativo. GPS usa 24 satlites en una rbita circular de 20.200 Km de altitud. La contelacin fue completada con xito en Marzo de 1994. GLONASS (Global Orbiting Navigation Satellite System) es el sistema de Navegacin via satlite desarrollado por los soviticos. Es comparable al GPS. Emplea 21 satlites en una rbita circular a 19100 Km. de altitud.
-
Preguntas sobre GPS y GLONASS
Para qu hace falta el GLONASS si todo el mundo utiliza GPS? Los usuarios resuelven gracias a las seales de GLONASS y de GPS el mismo problema: establecer sobre el mapa el punto en el que se encuentra. En este sentido, el sistema ruso y el norteamericano son similares. Y el usuario no tendra ninguna motivacin para cambiar un sistema por otro. La situacin cambia si se utiliza un equipo que reciba y procese las seales de los dos sistemas. En ese caso el usuario obtiene ventajas significativas tanto en la que se refiere a la velocidad como a la de las coordenadas: en condiciones urbanas "estndar" pasa del 60-70% a casi un 100%. Adems, el operador del sistema de navegacin, que en el caso del GPS ha sido y sigue siendo el Pentgono, sigue teniendo la posibilidad de cortar la seal civil en un determinado territorio o bajar precisin de forma artificial. Esta funcin est soportada por la nueva generacin de satlites GPS. Y no solo nos referimos a un conflicto militar, se puede utilizar la amenaza del apagn "del interruptor del navegador" para objetivos polticos y econmicos. Por eso, de la dependencia tecnolgica en el estrecho sector de la navegacin por satlite no hay ms que un paso hacia la dependencia econmica, poltica y militar.
-
Rusia ha declarado ms de una vez que GLONASS es la nica alternativa al GPS. Hasta qu punto es cierto? Hoy en da esto es cierto. Pero la situacin cambiar en tres o cuatro aos. El sistema chino BeiDou ya funciona como sistema regional (es decir complementario a los sistemas GLONASS y GPS) dentro de la regin del Pacfico asitico. La Unin Europea ha comenzado el desarrollo de su sistema Galileo. A no ser que haya una causa de fuerza mayor, dentro de algunos aos estos dos sistemas alcanzarn un nivel mundial. El problema es quin llegar primero. GPS y GLONASS se crearon en los aos 70 y no tuvieron en cuenta las nuevas tecnologas. Galileo y sobre todo BeiDou se han diseado dcadas despus, lo que ha permitido soluciones ms modernas y ms avanzadas tecnolgicamente. Los sistemas GPS y GLONASS tambin se han modernizado pero este proceso es largo y costoso.
-
A menudo se dice que el GPS es bastante ms preciso que el GLONASS. Hasta qu punto es cierto esto? La precisin "de uso" del GLONASS a da de hoy es menor en trminos medios que la del GPS. Si los receptores de GPS tericamente permiten determinar la localizacin en un espacio abierto con un error de menos de 3-4 metros, para los receptores de GLONASS el error es de 7-10 metros. En la prctica esta diferencia terica no es importante por dos razones. La primera es que los receptores de navegacin que soportan tan solo GLONASS sin GPS, simplemente no existen. La segunda razn es que en el sistema clientelar, a menudo se produce un procesamiento extra de la seal promediando el resultado. Por ejemplo, si un coche va por una carretera recta ideal, la trayectoria del movimiento del coche, segn los datos de la navegacin satelital, parecera una complicada lnea quebrada con muchos desvos caticos. Despus el software del navegador une esta lnea a un grfico del camino al mapa digital, con lo que se obtiene en la pantalla esa misma lnea ideal de la carretera que tenemos en realidad.
-
Cmo se puede aumentar la precisin del GLONASS? La precisin en la localizacin se puede aumentar con ayuda de una infraestructura satelital. Hoy en da en Rusia se est creando un sistema de correccin diferencial de banda ancha (SDKM por sus siglas en ruso). Las rectificaciones en el SDKM se transmitirn a travs de un canal satelital de los satlites "Luch" situados en la rbita geoestacionaria. La precisin en la determinacin de coordenadas llega a los decmetros, pero el dispositivo del usuario (para aquellos que necesiten una precisin tan alta) tendr que estar equipado con un mdem especial capaz de captar la seal satelital. Hay una alternativa, sin satlite, pero para esto son necesarias alrededor de trescientas estaciones base de correccin diferencial, distribuidas por las regiones ms desarrolladas del pas. Esta variante puede permitir una precisin milimtrica con gastos sustancialmente menores. Existe una red similar desarrollada por los rusos (GLONASS) que mantiene muchas similitudes con el sistema americano tanto en su fundamento como en su utilizacin, pero que no da cobertura en toda la Tierra. Como la red GPS, la GLONASS ofrece dos niveles de servicio, proporcionando a los usuarios civiles una precisin en la posicin horizontal de 60 metros y una precisin en la posicin vertical de 75 metros (as pues, el error en un mapa a escala 1:50.000 puede ser de 1 15 mm).
-
COLECTOR DE DATOS CON RECEPTORES GPS
PDA (Personal Digital Assistant) Captura la informacin en campo. Permite al usuario ubicarse geogrficamente en terreno y a
llevar a cabo la toma de datos de forma automatizada. Garantiza la asignacin a cada elemento de un cdigo nico de
identificacin. La capacidad de almacenamiento interno de las PDAs, incluso de
las ms potentes, es muy pequea. Para compensar este inconveniente la cartografa digital se almacena en tarjetas de memoria compact flash (CF) o secure digital (SD)
Es imprescindible aprender a configurar sus diferentes funciones en especial las referentes a las visualizacin y obtencin de los puntos tomados.
-
La eleccin del PDA condiciona el tipo de receptor GPS. Los PDA dispongan de una expansin de memoria extra
para almacenar informacin. Los receptores GPS tipo mouse se conectan a los PDA por
cable. La tecnologa bluetooth facilita el intercambio de
informacin a corta distancia entre GPS y PDA y prescinde de los cables de conexin y se imponen sobre los dems tipos de receptores.
-
Planificacin Eleccin de los vrtices geodsicos. Mnimo 4 vrtices. Tienen que cubrir perfectamente la zona. Equidistantes. Campo Localizar los vrtices. Estacionamientos y observaciones. Datos obtenidos. Gabinete Transformacin de coordenadas. Contar sistemas y software informticos.
-
POSICIONAMIENTO GPS
Relativo
Post-proceso
Esttico Movimiento
Stop and go Cinemtico
Tiempo Real
RTK
Absoluto
DGPS SPS
-
Caractersticas Con un nico receptor. Observables: suelen ser los cdigos, pero tambin se podran utilizar las
diferencias de fase o ambas. Los receptores utilizados son pequeos, porttiles . Consiste en la solucin de una interseccin de todas las distancias satlite-
receptor sobre la estacin en un perodo de observacin. Precisin: de 15 a 100 metros. Aplicaciones: Excursionistas, Barcos en alta mar.
-
Caractersticas: Hay una serie de estaciones de referencia que obtienen su posicin a
partir de las pseudodistancias. Como conocen sus coordenadas pueden calcular los errores cometidos. Se transmiten las correcciones a los usuarios. Precisin: 3 m
-
RTK Real Time Kinematic (Tiempo Real)
Caractersticas: Una estacin de referencia fija
que rastrea de modo continuo con capacidad de resolver las ambigedades en tiempo real.
El otro receptor en una plataforma mvil.
Ambos estn enlazados mediante un radio mdem.
El segundo receptor obtiene su posicin en tiempo real.
Gran precisin: 1-2 cm. Aplicaciones: Replanteos, Levantamiento de perfiles, levantamiento de carreteras, fronteras, modelos digitales de terreno.
-
Esttico (Post-proceso) Este modo de posicionamiento consiste en el estacionamiento de receptores que no varan su posicin durante la etapa de observacin. Caractersticas: Mtodo clsico para a grandes
distancias. Gran precisin: 5mm. Precisin de milmetro en lneas
cortas. Tiempo de observacin largos
proporcional a la longitud de la lnea.
Aplicaciones: Control geodsico, control de
movimientos tectnicos, control de deformacin en estructuras.
-
Cinemtico (Post-proceso) Caractersticas: Una estacin de referencia fija
que rastrea de modo continuo. El otro receptor en una
plataforma mvil. Mediciones en intervalos
preseleccionados: 1seg. 2seg. Precisin: 1 a 2 cm. Debe mantenerse el contacto
con 4 satlites. Aplicaciones: Levantamiento de ejes de carreteras, determinacin de la trayectoria de objetos en movimiento, batimetra.
-
Stop and go (Post-proceso) Caractersticas: Una estacin de referencia fija que
rastrea de modo continuo. Receptor mvil en un jaln. Parar slo 2 3 pocas en los dems
puntos Precisin: 1 a 2 cm. Resolver una ambigedad inicial en
post-proceso Debe mantenerse el contacto con 4
satlites. Aplicaciones: Levantamientos taquimtricos en
general, determinacin de superficies y parcelaciones, control y evolucin de fenmenos y obras, modelos digitales de terreno, obtencin de perfiles transversales.
-
AutoCAD Civil 3D sirve como un soporte para hacer los anlisis y cambios de diseo dinmicos, tambin ayuda en los clculos de reas y volmenes, como tambin en la tarea de laminar los planos, para su presentacin final.
El Software mas empleados es:
-
Al iniciar el programa AUTOCAD CIVIL 3D 2014 METRIC, se tiene la siguiente pantalla:
-
Una vez realizado el levantamiento de campo se tendr la base de datos, es decir un archivo de puntos, tipo CSV (delimitado por comas), con el formato: Punto, Este, Norte, Cota, Descripcin. (PENZD) u otros formatos.
Transportamos los puntos, selecciona points y seguidamente point creation tools.
En la nueva ventana seleccionamos import points
-
En esta nueva ventana seleccionar el signo + y buscamos el archivo guardado de los puntos de campo; seleccionamos el formato elegido (modo original) y designamos a ese conjunto de puntos, en el caso de la imagen se designo superficie; finalmente ok.
-
En la lnea de comandos colocar ZE y entro para conseguir los puntos.
-
En la herramienta: Toolspace, pestaa Prospector, seleccionar Surfaces haciendo para elegir Create Surface. Hacer OK en el siguiente cuadro para aceptar lo predefinido
Abrir Surface/Surface 1/Definition
haciendo en Point Groups para elegir Add.. En el cuadro Point Group elegir _All point luego y OK
-
Nmero de diapositiva 1Nmero de diapositiva 2Nmero de diapositiva 3Nmero de diapositiva 4Nmero de diapositiva 5Nmero de diapositiva 6Nmero de diapositiva 7Nmero de diapositiva 8Nmero de diapositiva 9Nmero de diapositiva 10Nmero de diapositiva 11Nmero de diapositiva 12Nmero de diapositiva 13Nmero de diapositiva 14Nmero de diapositiva 15Nmero de diapositiva 16Nmero de diapositiva 17Nmero de diapositiva 18Nmero de diapositiva 19Nmero de diapositiva 20Nmero de diapositiva 21Nmero de diapositiva 22Nmero de diapositiva 23Nmero de diapositiva 24Nmero de diapositiva 25Nmero de diapositiva 26Nmero de diapositiva 27Nmero de diapositiva 28Nmero de diapositiva 29Nmero de diapositiva 30Nmero de diapositiva 31Nmero de diapositiva 32Nmero de diapositiva 33Nmero de diapositiva 34Nmero de diapositiva 35Nmero de diapositiva 36Nmero de diapositiva 37Nmero de diapositiva 38Nmero de diapositiva 39Nmero de diapositiva 40Nmero de diapositiva 41Nmero de diapositiva 42Nmero de diapositiva 43Nmero de diapositiva 44Nmero de diapositiva 45Nmero de diapositiva 46Nmero de diapositiva 47Nmero de diapositiva 48Nmero de diapositiva 49Nmero de diapositiva 50Nmero de diapositiva 51Nmero de diapositiva 52Nmero de diapositiva 53Nmero de diapositiva 54Nmero de diapositiva 55Nmero de diapositiva 56Nmero de diapositiva 57Nmero de diapositiva 58Nmero de diapositiva 59Nmero de diapositiva 60Nmero de diapositiva 61Nmero de diapositiva 62Nmero de diapositiva 63HISTORIAFUNCIONAMIENTOFIABILIDAD DE LOS DATOSFUENTES DE ERRORDGPS O GPS DIFERENCIALINTEGRACIN CON TELEFONA MVILGLONASSHISTORIAEVOLUCIN DEL SISTEMA GLONASSDIFERENCIA ENTRE GLONASS Y GPSPreguntas sobre GPS y GLONASSNmero de diapositiva 75Nmero de diapositiva 76Nmero de diapositiva 77Nmero de diapositiva 78Nmero de diapositiva 79COLECTOR DE DATOS CON RECEPTORES GPSNmero de diapositiva 81CONSIDERACIONESDESARROLLO DE UN PROYECTO GPSMTODOS DE POSICIONAMIENTOABSOLUTORELATIVORTK Real Time Kinematic (Tiempo Real)Esttico (Post-proceso)Cinemtico (Post-proceso)Stop and go (Post-proceso)Nmero de diapositiva 91Nmero de diapositiva 92Nmero de diapositiva 93Nmero de diapositiva 94Nmero de diapositiva 95Nmero de diapositiva 96Nmero de diapositiva 97Nmero de diapositiva 98