Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas
15
04/05/2012 Física I Modelo Cuerpo Rígido. Estática
-
Upload
maxi-burgos -
Category
Documents
-
view
532 -
download
1
Transcript of Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 1/15
04/05/2012
Física I Modelo Cuerpo
Rígido. Estática

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 2/15
Estática: el estudio de fuerzas en equilibrio
04/05/2012
Equilibrio (“fuerzas iguales” en latín)
P N
CG
r d mr
M
CG CM
Centro de gravedad: CG
5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 3/15
Estática: el estudio de fuerzas en equilibrio
04/05/2012
Las condiciones de equilibrio
Para que un objeto esté en equilibrio no debe estar acelerando, por lo que la suma vectorial de
todas las fuerzas externas que actúen sobre el cuerpo debe ser cero:
0F O bien SFx = 0, SFy = 0, SFz = 0

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 4/15
Estática: el estudio de fuerzas en equilibrio
04/05/2012
F
F
Aunque las ecuaciones, son una condición necesaria para que un objeto esté en equilibrio, no
son una condición suficiente. La figura, muestra un objeto sobre el cual la fuerza neta es cero.
Aunque las dos fuerzas designadas F se suman y dan una fuerza neta cero sobre el objeto, danlugar a una torca neta que hará girar al objeto.
Necesitamos entonces una segunda condición de equilibrio: que la suma vectorial de todas las
torcas externas que actúen sobre el cuerpo sea cero:
0
La ec. puede también escribirse en forma de
componentes:
Sx = 0, Sy = 0, Sz = 0
Las torcas se calculan respecto a algún punto O
escogido, y x,
yy
zson las componentes a lo
largo de tres ejes cualesquiera escogidos.

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 5/15
El objeto regresa a su posición original, en cuyo caso se dice que está en equilibrio estable.
El objeto se mueve alejándose de su posición original, en cuyo caso se dice que está en
equilibrio inestable.
El objeto permanece en su nueva posición, en cuyo caso se dice que está en equilibrio neutro o indiferente.
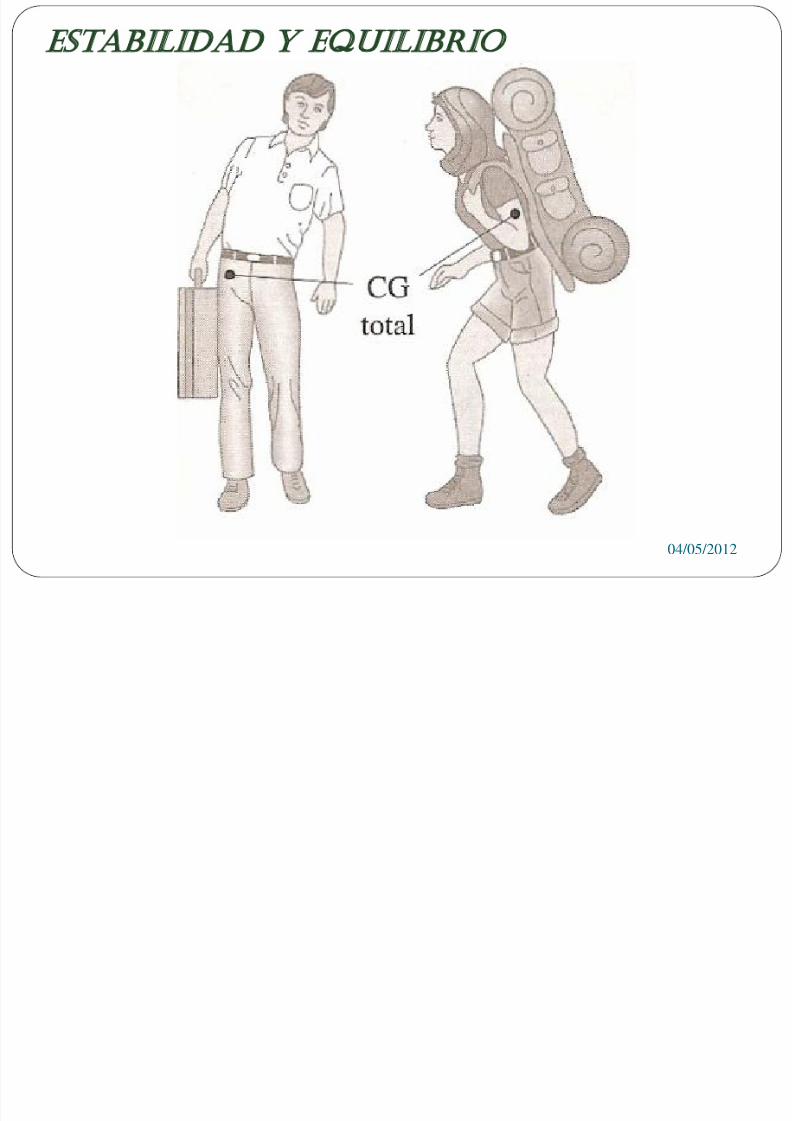
Estabilidad y equilibrio
04/05/2012
En general, un cuerpo cuyo CG está arriba de su base de soporte será estable si una línea
vertical dibujada hacia abajo desde el CG cae dentro de la base de soporte. Esto es debido a
que la fuerza normal hacia arriba sobre el objeto (que equilibra la gravedad) sólo puede ser
ejercida dentro del área de contacto, de manera que si la fuerza de graved
ad actúa más allá de
esta área, una torca neta actuará para volcar al objeto. La estabilidad puede entonces ser
relativa.
Fuerza neta
(a) (b)

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 6/15
Estabilidad y equilibrio
04/05/2012
CG
5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 7/15
Estabilidad y equilibrio
04/05/2012

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 8/15
04/05/2012
Física I
Modelo Cuerpo Rígido.
Rotación y traslacióncombinadas

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 9/15
Energía cinética
04/05/2012
CM +
v
CM C Mv
v
C Mv
v 0
C Mv 2 v
= CM
Un objeto que gira mientras que su centro de masa (CM) experimenta movimiento traslacional
tendrá energía cinética traslacional y rotacional. La ecuación, K = ½ I w2, da la energía cinética
rotacional si el eje de rotación es fijo. Si el objeto se está moviendo (como un disco que rueda
a lo largo del piso, esta ecuación es aún válida siempre que el eje de rotación esté fijo en
dirección. La energía cinética total es entonces:
C MK M v 21
2 C MIK w 21
2 C M C MIK M v w2 21 1
2 2+ =

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 10/15
La energía cinética total de un cuerpo en movimiento es igual a la energía cinética traslacional de su CM más
la energía cinética del movimiento relativo al centro de masa.
04/05/2012
ir '
CMr
ir
x
y
x’
y’
xi
yi
CM CM CM CMx i y j z k r
i i i ix i y j z k r
i CM i v v v
El vector posición del CM en cualquier momento en
algún marco de referencia inercial es:
El vector posición de la i –ésima partícula de
masa m en este marco de referencia inercial es:
xi= x
CM+ x
i’, y
i= y
CM+ y
i’, y z
i= z
CM+ z
i’
Donde vCM es la velocidad del CM en este
marco de referencia y vi’ es la velocidad de
la i –ésima partícula relativa al CM.

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 11/1504/05/2012
i i i i iK m v m 21 1
2 2v v
Podemos usar el producto escalar y escribir v2 = v v, de modo que la energía cinética total K es:
i C M i C M i
K m 1
2v v v v
i C M C M i i i iK m v m m v 2 21 1
2 2v v
Como siempre, Smi= M, o sea la masa total del cuerpo. También, Sm
i v’
i= 0, como puede verse
tomando la derivada de la definición del centro de masa cuando el CM está en el origen de
coordenadas, rCM
= M-1 S mi
r’i
= 0. Por lo tanto podemos escribir que:
CM i iK Mv m v 2 21 1
2 2
i i i i CMm v m R I w w 2 2 2 21 1 1
2 2 2
i i i i CMm v m R I w w 2 2 2 21 1 1
2 2 2
Para cada partícula,v
’i =w
R’i, donde R’i es la distancia perpendicular de la i –ésima partículadesde una línea que pasa por el CM y perpendicular al plano del movimiento. Entonces:
C M C MK M v I w2 21 1
2 2
Energía cinética total es igual a suma de las energías de traslación y de rotación

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 12/15
04/05/2012
Relación entre momento angular y torca
Recordando la Ley fundamental de la dinámica de rotación:
C MC M
d
d t
LΓ
rCM
O
ri
r’i
mi
CM
x
y
z
i C M i r r r
i
i i i i i i CM
d r dm m m
dt dt
p v r r
La posición de la i –ésima partícula con respecto al CM es r’i, donde:
CM i ii L r p
i i i C Mm p p v
i i i C Mm
p p v
i i C M -r r r

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 13/15
04/05/2012
C M i i
i ii i
d d d
d t d t d t
L r p
p r
i
ii
d
d t
0r
p
i i C MC M
ii
d md
d t d t
p vL
r
C M i C M
i i ii i
d d dm
d t d t d t
L p v
r r
C M
i i i C MC Mi i
d
d t
L
r F Γ Γ
Donde S GCM es la torca externa resultante sobre todo el sistema, calculada respecto al CM:
CM i i
i ii
d d d
d t d t d t
L r p
p r
i i C Mid md
d t d t
p vp

5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 14/15
¿Por qué se detiene una esfera rodante?
04/05/2012
fr
CMv
R 0
Una esfera está rodando hacia la derecha como se muestra en la figura y está desacelerando.
Por la segunda ley de Newton de traslación
fr m a
Curiosamente, si nos fijamos ahora por la segunda ley de Newton de rotación (calculada
respecto al centro de masa)
ICM fr RS 0
5/17/2018 Física I, 11Modelo Cuerpo Rígido, Estática, Rotación y traslación combinadas - slidepdf.com
http://slidepdf.com/reader/full/fisica-i-11modelo-cuerpo-rigido-estatica-rotacion-y-traslacion-combinadas 15/15
fr
CMvl
N
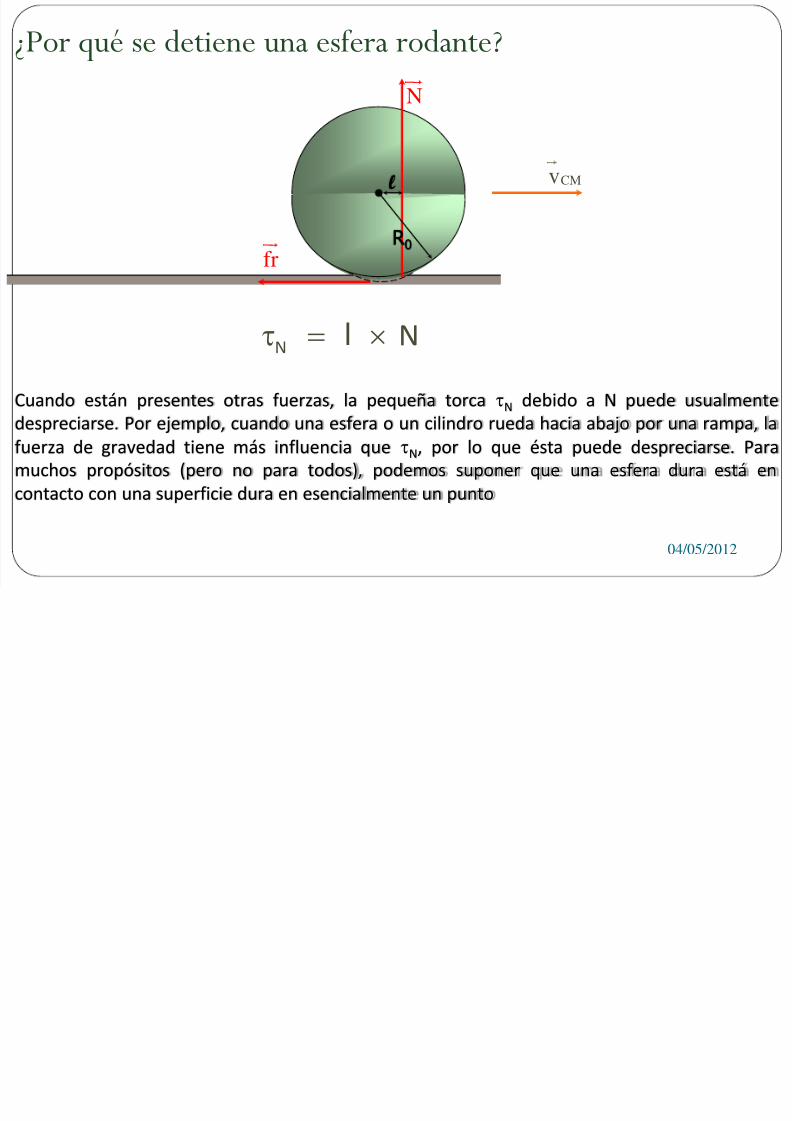
¿Por qué se detiene una esfera rodante?
04/05/2012
R 0
Cuando están presentes otras fuerzas, la pequeña torca N
debido a N puede usualmente
despreciarse. Por ejemplo, cuando una esfera o un cilindro rueda hacia abajo por una rampa, la
fuerza de gravedad tiene más influencia que N, por lo que ésta puede despreciarse. Para
muchos propósitos (pero no para todos), podemos suponer que una esfera dura está en
contacto con una superficie dura en esencialmente un punto
N N l