Examen Junio 2004 - GSEPgsep.uc3m.es/archivos/examenes/EIii/EI2 Junio 2004 con soluciones... ·...
17
Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad Página 1 de 17 Cuestiones teóricas (1,5 puntos, tiempo recomendado: 30 min) 1. Comparar los convertidores de CC lineales y conmutados. ¿En qué tipo de pérdidas de potencia incurren predominantemente los semiconductores en un tipo de convertidor y otro? 2. Sobre los convertidores “flyback” y “forward”: • ¿Se necesita en alguno de ellos garantizar la desmagnetización completa del núcleo del transformador al final de cada ciclo? En caso afirmativo, explicar brevemente si se necesita algún dispositivo adicional para hacerlo y cómo opera. • ¿Alguno de ellos, además requerir de dicho dispositivo adicional, presenta restricciones en cuanto al máximo ciclo de trabajo con que puede ser controlado? 3. En la topología de puente completo de la figura se somete a los transistores a tres pautas de conmutación distintas (A, B y C), ilustradas en los correspondientes oscilogramas. Suponiendo que en todos los casos la carga es un accionamiento mecánico (del tipo que proceda según lo que se obtenga en la salida), determinar qué tipo de conversión de potencia resulta en cada situación y, en los casos para los que resulte relevante, qué tipo de control se efectúa y qué régimen de funcionamiento presenta la carga. Ve T2 T1 D1 D2 T4 T3 M D3 D3 Ve T2 T1 D1 D2 T4 T3 M D3 D3 T1 T2 T3 T4 T1 T2 T3 T4 T1 T2 T3 T4 A B C 4. Explicar e ilustrar cómo resulta el espectro armónico de la tensión de salida de un inversor controlado por PWM unipolar en zona lineal. Describir brevemente cómo evoluciona dicho espectro al elevar “m a ” por encima de la unidad. Si la conmutación fuese bipolar, ¿sería siendo válido todo lo dicho?
Transcript of Examen Junio 2004 - GSEPgsep.uc3m.es/archivos/examenes/EIii/EI2 Junio 2004 con soluciones... ·...
Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 1 de 17
Cuestiones teóricas (1,5 puntos, tiempo recomendado: 30 min)
1. Comparar los convertidores de CC lineales y conmutados. ¿En qué tipo de pérdidas de potencia incurren predominantemente los semiconductores en un tipo de convertidor y otro?
2. Sobre los convertidores “flyback” y “forward”:
• ¿Se necesita en alguno de ellos garantizar la desmagnetización completa del núcleo del transformador al final de cada ciclo? En caso afirmativo, explicar brevemente si se necesita algún dispositivo adicional para hacerlo y cómo opera.
• ¿Alguno de ellos, además requerir de dicho dispositivo adicional, presenta restricciones en cuanto al máximo ciclo de trabajo con que puede ser controlado?
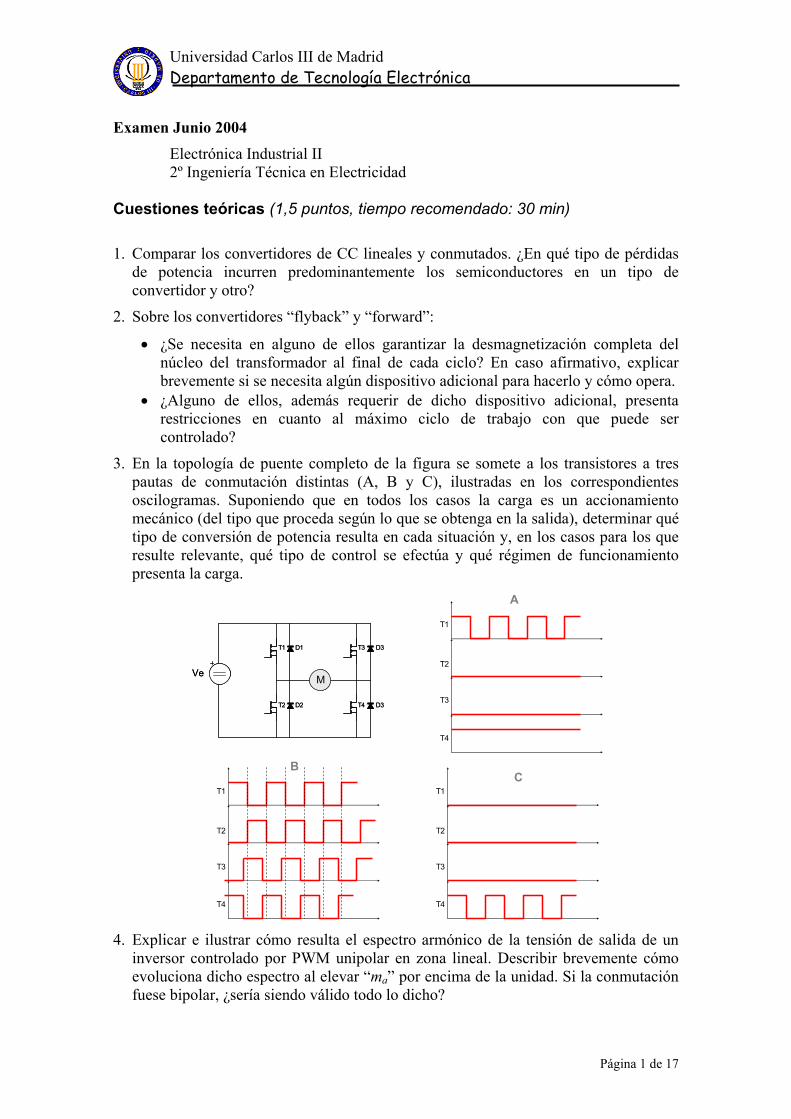
3. En la topología de puente completo de la figura se somete a los transistores a tres pautas de conmutación distintas (A, B y C), ilustradas en los correspondientes oscilogramas. Suponiendo que en todos los casos la carga es un accionamiento mecánico (del tipo que proceda según lo que se obtenga en la salida), determinar qué tipo de conversión de potencia resulta en cada situación y, en los casos para los que resulte relevante, qué tipo de control se efectúa y qué régimen de funcionamiento presenta la carga.
Ve
T2
T1 D1
D2 T4
T3
M
D3
D3
Ve
T2
T1 D1
D2 T4
T3
M
D3
D3
T1
T2
T3
T4
T1
T2
T3
T4
T1
T2
T3
T4
A
BC
4. Explicar e ilustrar cómo resulta el espectro armónico de la tensión de salida de un
inversor controlado por PWM unipolar en zona lineal. Describir brevemente cómo evoluciona dicho espectro al elevar “ma” por encima de la unidad. Si la conmutación fuese bipolar, ¿sería siendo válido todo lo dicho?

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 2 de 17
Solución Cuestiones Cuestión 1 Los convertidores lineales tienen la virtud fundamental de su simplicidad constructiva, debida tanto a la sencillez de su principio de funcionamiento como al bajo número de componentes que requiere. Las ventajas que se derivan de ello son robustez, fiabilidad y bajo coste. Por contra, tienen el importante inconveniente de la alta disipación de potencia en la que incurren, debido a que el semiconductor trabaja en zona lineal. Se utilizan casi exclusivamente en aplicaciones de baja potencia. Por su parte, los convertidores conmutados presentan más complejidad constructiva pero, en contraprestación, ofrecen un rendimiento muy elevado gracias a que los semiconductores trabajan en conmutación, lo que, no obstante, los hace emisores de ruido electromagnético. Son adecuados para todos los rangos de potencia.
En los semiconductores de los convertidores lineales se producen pérdidas en conducción exclusivamente, mientras que en los conmutados existen tanto de conducción como de conmutación.
Cuestión 2 Sí, en el forward. El dispositivo adicional que se utiliza típicamente es un tercer
devanado que, en el intervalo de apagado del interruptor, cierra una malla con la fuente de CC de entrada por la que circulan los amperios-vuelta necesarios para cancelar los que la inductancia magnetizante (Lm) necesita descargar sobre el devanado primario para desmagnetizar el núcleo.
Sí, también el forward. Para que el proceso de desmagnetización antes descrito se complete antes del comienzo del nuevo ciclo, D no puede ser mayor que una constante que depende de la relación de espiras entre el tercer devanado y el
primario, concretamente 1
1
1
3 +<
NND .
Cuestión 3 Topología Conversión de
energía Tipo de control Régimen de
funcionamiento de la carga
A CC/CC Convertidor de CC (chopper)
- Motor (de CC)
B CC/CA Inversor Desplazamiento de fase Motor (de CA)
C CC/CC Convertidor de CC (chopper)
- Freno regenerativo (generador de CC), con sentido de giro opuesto al del caso A

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 3 de 17
Cuestión 4 La tensión de salida de un inversor controlado por PWM unipolar en zona lineal
presenta amplitudes armónicas que sólo son reseñables para índices pertenecientes a un estrecho intervalo centrado en cada uno de los múltiplos pares del índice de modulación de frecuencia, mf (esto es, si mf=20, los índices n=40, 80, 120,…). La amplitud del resto de los armónicos es despreciable.
Si elevamos ma por encima de la unidad, primero entraremos en la zona de sobremodulación, que se caracteriza porque los armónicos dominantes en zona lineal, anteriormente referidos, ya no lo son tanto y por un ensanchamiento de los intervalos de índices armónicos que presentan amplitudes considerables.
Si continuamos elevando ma, la tensión de salida del inversor tenderá a una cuadrada pura y, en el límite, quedará reducida a ella, de forma que el espectro armónico resultará el conocido de la onda cuadrada, con amplitudes armónicas monótonamente decrecientes.
En el caso de la conmutación bipolar, el comportamiento anteriormente descrito se produce igualmente, sólo que los índices armónicos dominantes en zona lineal son todos los múltiplos de mf, no sólo los pares.
Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 4 de 17
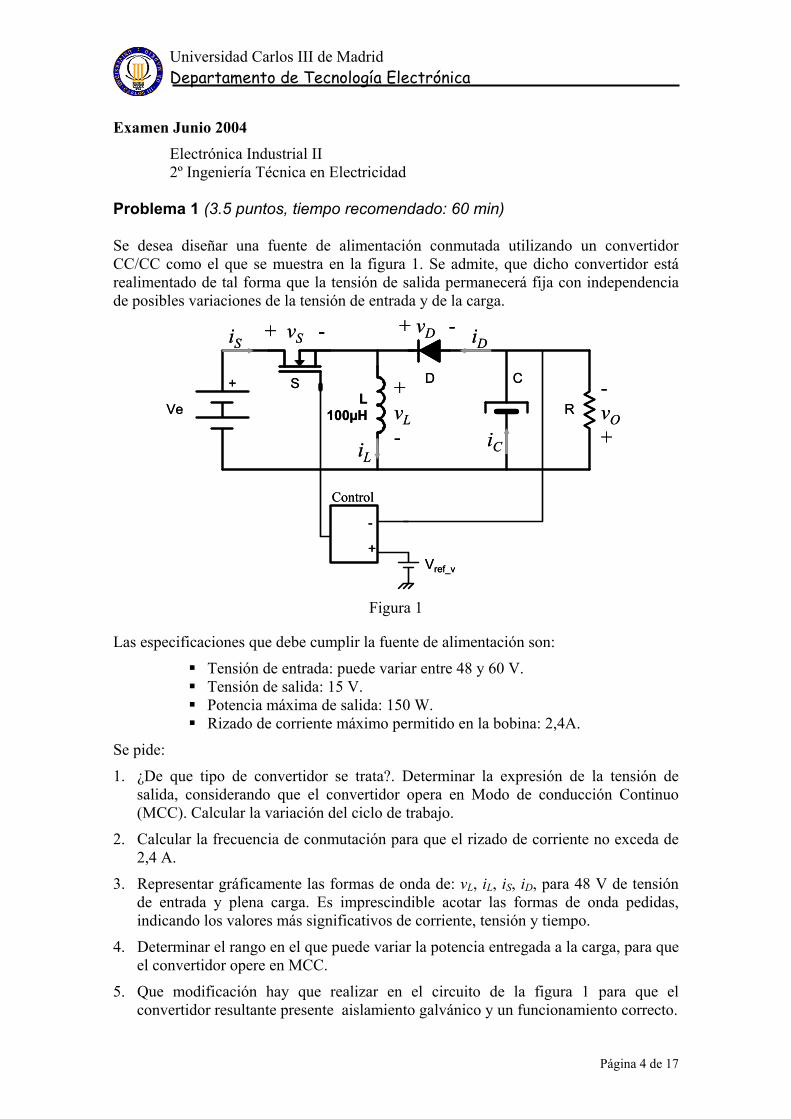
Problema 1 (3.5 puntos, tiempo recomendado: 60 min) Se desea diseñar una fuente de alimentación conmutada utilizando un convertidor CC/CC como el que se muestra en la figura 1. Se admite, que dicho convertidor está realimentado de tal forma que la tensión de salida permanecerá fija con independencia de posibles variaciones de la tensión de entrada y de la carga.
D C
+Vref_v
+
-
SL
100µHVe
Control
iS
iL
iD+ vS -
+ vL-
+ vD -
-vO+
R
iC
D C
+Vref_v
+
-
SL
100µHVe
Control
iS
iL
iD+ vS -
+ vL-
+ vD -
-vO+
R
iC
Figura 1
Las especificaciones que debe cumplir la fuente de alimentación son:
Tensión de entrada: puede variar entre 48 y 60 V. Tensión de salida: 15 V. Potencia máxima de salida: 150 W. Rizado de corriente máximo permitido en la bobina: 2,4A.
Se pide:
1. ¿De que tipo de convertidor se trata?. Determinar la expresión de la tensión de salida, considerando que el convertidor opera en Modo de conducción Continuo (MCC). Calcular la variación del ciclo de trabajo.
2. Calcular la frecuencia de conmutación para que el rizado de corriente no exceda de 2,4 A.
3. Representar gráficamente las formas de onda de: vL, iL, iS, iD, para 48 V de tensión de entrada y plena carga. Es imprescindible acotar las formas de onda pedidas, indicando los valores más significativos de corriente, tensión y tiempo.
4. Determinar el rango en el que puede variar la potencia entregada a la carga, para que el convertidor opere en MCC.
5. Que modificación hay que realizar en el circuito de la figura 1 para que el convertidor resultante presente aislamiento galvánico y un funcionamiento correcto.

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 5 de 17
Solución Problema 1
Apartado 1: Se trata de un convertidor reductor – elevador. Aplicando la condición de régimen permanente, tensión media en la inductancia L igual a cero o “igualdad voltios x segundo“, se obtiene:
D
DVVv EOL −⋅=⇒=1
0 (1)
Hay que tener en cuenta, que considerando el criterio de signos para la tensión de salida que se presenta en la figura 1, ésta resulta positiva. Despejando el ciclo de trabajo de (1) se obtiene (2) y a partir de ésta se puede deducir la variación del ciclo de trabajo:
EO
O
VVVD+
= (2)
(VE)MAX = 60 V ⇒ DMIN = 0,2 (VE)MIN = 48 V ⇒ DMAX = 0,238
Apartado 2: El rizado de la corriente de salida se puede expresar en función de la tensión de entrada y el ciclo de trabajo según (3) o en función de la tensión de salida y el ciclo de trabajo según (4):
L
TDVi EL
⋅⋅=∆ (3)
L
TDVi OL
⋅−⋅=∆
)1( (4)
El convertidor debe operar con un ciclo de trabajo que variará entre (DMIN ÷ DMAX) para asegurar 15 V de salida ante una entrada entre 48 y 60 V. ¿Cuál de los dos extremos se
debe seleccionar para calcular el valor de la frecuencia de conmutación que asegure un valor de ∆iL inferior a 2,4 A? Para responder esta cuestión, la expresión (4) presenta la ventaja de ser función de una única variable independiente, (en este caso el ciclo de trabajo, D) ya que la tensión de salida VO es constante por estar regulada mediante el lazo de control. Teniendo en cuenta (4) se puede representar la variación de ∆iL con respecto al ciclo de trabajo (figura 2).
Este gráfico permite comprobar como el caso más desfavorable a la hora de diseñar el valor de la frecuencia de conmutación dentro del rango de operación del DMIN – DMAX corresponde a DMIN, ya que este ciclo de trabajo proporciona el máximo valor para el rizado de iL, que viene dado por (5).
LTVO ⋅
1 D
Li∆
DMIN DMAX
( )L
TDVi MINOMAXL
⋅−⋅=∆
)1(LTVO ⋅
1 D
Li∆
DMIN DMAX
( )L
TDVi MINOMAXL
⋅−⋅=∆
)1(
Figura 2

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 6 de 17
( )
LTDVi MINO
MAXL⋅−⋅
=∆)1(
(5) A partir de (5) se puede deducir el valor de la frecuencia de conmutación mínima que hay que establecer a efectos de limitar el rizado de la corriente en la inductancia.
L
MINOC iL
DVf∆⋅−⋅
≥)1( (6)
Para los datos del problema, se tiene:
kHzAµH
VfC 504,2100
)2,01(15=
⋅−⋅
≥
Apartado 3: Las formas de onda pedidas se representan en la figura 3. En el convertidor reductor elevador, la corriente media en la inductancia (IL) no coincide con el valor de la corriente de carga, sino que se relacionan mediante la expresión (7).
DRVI
O
OL −
⋅=1
1 (7)
Para el caso de VE = 48V y RO el valor de la resistencia de carga correspondiente a la plena carga (150 W) se tiene:
AIL 12,13238,01
15,115
=−
⋅Ω
=
Para este mismo caso el rizado de la corriente en la inductancia presenta un valor:
AkHzµH
ViL 286,250100
)238,01(15=
⋅−⋅
=∆
Por tanto los valores I1 e I2 que caracterizan las corrientes iL, iS, iD se pueden calcular como sigue:
AAAiII LL 26,14286,22112,13
21
1 =⋅+=∆⋅+=
AAAiII LL 98,11286,22112,13
21
1 =⋅−=∆⋅−=
Apartado 4: También en el convertidor reductor – elevador se puede deducir si opera en Modo de Conducción Continuo (MCC) o en Modo de Conducción Discontinuo (MCD)
vGS
iL
t/TvL
t/T
t/T
D = 0,238
VE = 48 V
VO = 15 V
I1
I2
DRVI
O
OL −
⋅=1
1
t/TI1
I2iS
iD
t/TI1
I2
IL IO
vGS
iL
t/TvL
t/T
vL
t/T
t/T
D = 0,238
VE = 48 V
VO = 15 V
I1
I2
DRVI
O
OL −
⋅=1
1
t/TI1
I2iS
iD
t/TI1
I2
IL IO
Figura 3

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 7 de 17
comparando la mitad del rizado de la corriente en la inductancia con el valor medio de esta misma corriente. El convertidor opera en MCC si se cumple (8)
LL iI ∆⋅≥21 (8)
El valor de la corriente media por la inductancia se puede obtener a partir de (7), mientras que el del rizado se puede obtener a partir de (4). Por tanto sustituyendo las expresiones (4) y (7) en (8) se obtiene:
( )212)1(
11 D
TRL
LTDV
DRV
O
O
O
O −≥⋅
⋅⇒
⋅−⋅≥
−⋅
(9) lo que es equivalente a expresar de la siguiente forma:
( )21 DKKK CRÍTICACRÍTICA −=⇒≥ (10)
Considerando (9) o (10), se obtiene que para asegurar el Modo de Conducción Continuo la resistencia de carga RO deberá se inferior a un valor dado por (11):
( )21
12DT
LRO −⋅
⋅= (11)
La potencia de carga que se obtiene para esta resistencia viene dada por (12):
( )22 12
DVL
TP OO −⋅⋅⋅
= (12)
La expresión (12) depende exclusivamente del ciclo de trabajo ya que tanto L como T se han definido previamente y la tensión de salida es fija por estar regulada. En la figura 4 se ha representado la evolución de PO en función de D, a efectos de determinar cual es el ciclo de trabajo más desfavorable, aquel que impondrá un valor de potencia de carga inferior.
Es importante hacer hincapié en que el gráfico de la figura 4 no trata la evolución de la potencia de salida de un convertidor con el ciclo de trabajo, sino la variación de la potencia de carga mínima que se requiere para asegurar el MCC ante cualesquiera condiciones de operación del convertidor. En el caso del problema estas condiciones de operación están relacionadas con la variación del ciclo de trabajo. Por tanto, para asegurar en cualquier caso la operación en MCC, la potencia de carga podrá variar en el rango:
WPW O 15007,13 <<
Apartado 5: Para proporcionar aislamiento galvánico al convertidor reductor - elevador es necesario incluir un transformador diseñado de manera que sea capaz de almacenar energía. A
0 0.1 0.2 0.310
15
20
25
13,0714,4
Dmin Dmax
D
2
2 OVL
T⋅
⋅
Caso más desfavorable: DMAX
0 0.1 0.2 0.310
15
20
25
13,0714,4
Dmin Dmax
D
2
2 OVL
T⋅
⋅
Caso más desfavorable: DMAX
Figura 4

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 8 de 17
nivel de estructura del circuito, se puede considerar la inductancia del convertidor reductor-elevador como la inductancia magnetizante asociada al flujo común de un transformador. Por tanto, tal y como se indica en la figura 5, disponiendo adecuadamente los terminales correspondientes, el convertidor reductor – elevador se transforma finalmente en un convertidor Flyback. Como consideración adicional para el convertidor Flyback constituido, habría que disponer algún tipo de red de protección o “snubber” con objeto de reducir las sobre-tensiones que aparecen en el interruptor debidas a la inductancia de dispersión del transformador.
Se puede considerar la inductancia magnetizante de un transformador.
¿Dónde se colocan los terminales correspondientes?“La corriente por la inductancia magnetizante ha de seguir entrando por el punto”
El convertidor de partida es un reductor – elevador.
Dado que existe aislamiento galvánico se pueden reorganizar los elementos del convertidor y obtener una topología equivalente.
Se puede considerar la inductancia magnetizante de un transformador.
¿Dónde se colocan los terminales correspondientes?“La corriente por la inductancia magnetizante ha de seguir entrando por el punto”
El convertidor de partida es un reductor – elevador.
Dado que existe aislamiento galvánico se pueden reorganizar los elementos del convertidor y obtener una topología equivalente.
Figura 5

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 9 de 17
Problema 2 (2 puntos, tiempo recomendado: 40 min)
El convertidor de dos cuadrantes de la figura 1 alimenta a un motor de continua cuyo equivalente eléctrico se representa también en la figura 1.
M
R = 1 Ω L= 4 H E
T = KT . IM
E = Kω . ωKω= 0,2 V/ rpm
V = 500 V MA B
T1D1
iD1iT1
T2D2
iD2iT2
iM
+vGE1
-
+vGE2
-
+
vM
-
A B
KT= 1,91 N.m / A
A B
MM
R = 1 Ω L= 4 H E
T = KT . IM
E = Kω . ωT = KT . IM
E = Kω . ωKω= 0,2 V/ rpm
V = 500 V MMAA BB
T1D1
iD1iT1
T2D2
iD2iT2
iM
+vGE1
-
+vGE2
-
+
vM
-
A B
KT= 1,91 N.m / A
A B
Figura 1
El motor debe girar a 1500 rpm, y las señales de control del convertidor (vGE1 y vGE2) se representan en los oscilogramas de la figura 2 para dos modos de operación del convertidor. Se puede considerar infinita la inductancia del motor.
Se pide:
1. Calcular la corriente del motor para los modos de operación MODO 1 y MODO 2.
2. Identificar en que modo de operación el motor funciona como tal y en que modo lo hace como freno. Justifique la respuesta adecuadamente.
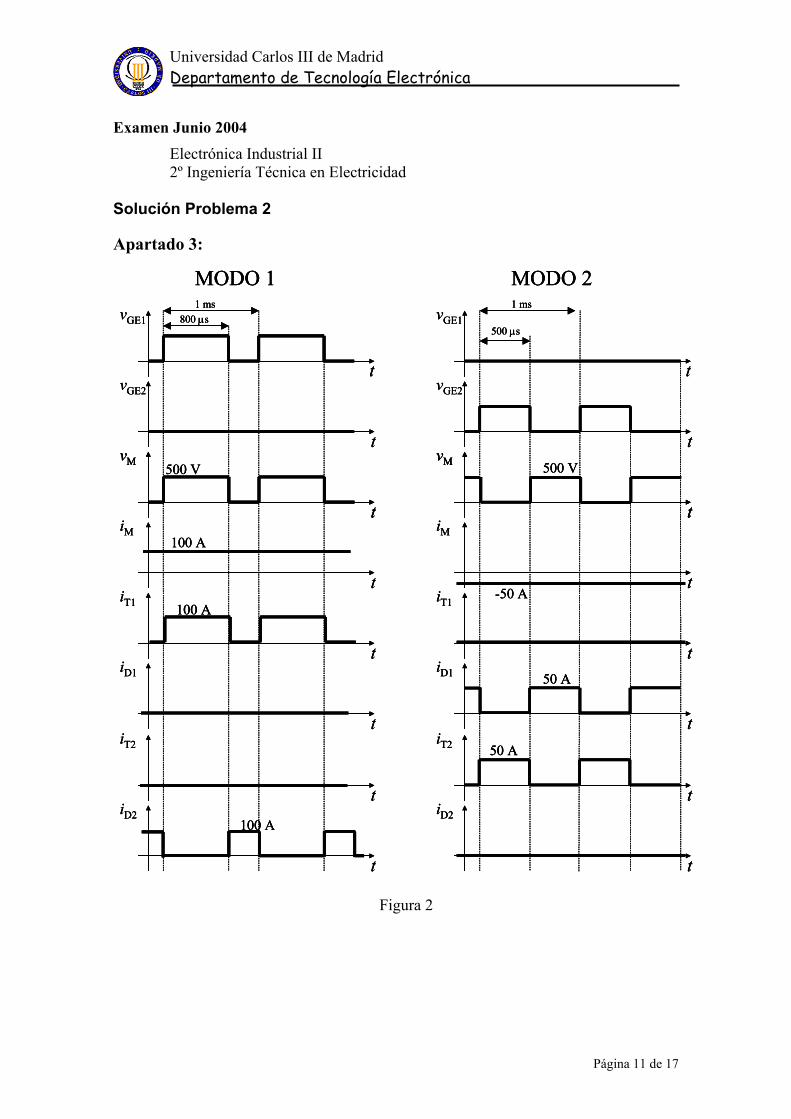
3. Representar las formas de onda de las magnitudes: vM, iM, iT1, iD1, iT2 e iD2, para cada uno de los modos de operación, en el oscilograma correspondiente que se recoge en la figura 2. Es imprescindible acotar las formas de onda pedidas, indicando los valores más significativos de corriente, tensión y tiempo.
4. Calcular para cada uno de los modos de operación, la potencia cedida por la fuente y la potencia mecánica que cede el eje del motor.

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 10 de 17
Solución Problema 2
Apartado 1: La fuerza contraelectromotriz se calcula según (1):
300V.1500rpm V/rpm 0,2 ωKωE ==⋅= (13) La corriente por el motor se calcula según la expresión (14):
REDV
REvI M
M−⋅
=−
= (14)
donde:
DVvM ⋅= es la valor medio de la tensión que el “chopper” proporciona al motor.
Aplicando la expresión (14) a los modos de operación: Modo 1 y Modo 2 se obtienen unas corrientes en el motor que se recogen en la tabla 1. Debido al elevado valor de la inductancia del motor se supone que la corriente en el motor es prácticamente continua.
MODO 1 MODO 2
Ciclo de trabajo, D ♣♣♣ 0,8 0,5
Corriente en el motor, IM AVVIM 1001
3008.0500=
Ω−⋅
= AVVI M 501
3005.0500−=
Ω−⋅
=
♣♣♣ IMPORTANTE: El ciclo de trabajo, se ha definido como el tiempo en que el motor permanece conectado a la fuente respecto del periodo de conmutación. Para el Modo 1 este ciclo de trabajo se calcula considerando el tiempo de conducción del igbt T1 y para el Modo 2 considerando el tiempo de conducción del diodo D1.
Tabla 1
Apartado 2: En ambos modos de operación, el valor de la fuerza contraelectromotriz no ha variado, se mantiene constante = 300V. Esto significa que el motor sigue girando con igual velocidad en ambos modos. Ahora bien, en el Modo 1, la corriente ha resultado positiva, por lo tanto el par motor tiene el mismo sentido de giro que la velocidad angular, y en este caso, la máquina eléctrica funciona como motor.
En el Modo 2, la corriente es negativa por lo que el par motor se opone al sentido de giro del rotor. En este caso, la máquina opera como freno regenerativo o generador.
Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 11 de 17
Solución Problema 2
Apartado 3:
iD1
iT1
t
t
1 ms800 µsvGE1
vGE2
iM
t
tvM
t
t
MODO 1
iD2
iT2
t
t
500 V
100 A
100 A
100 A
iD1
iT1
t
t
1 ms
500 µsvGE1
vGE2
iM
t
tvM
t
t
MODO 2
iD2
iT2
t
t
-50 A
500 V
50 A
50 AiD1
iT1
t
t
1 ms800 µsvGE1
vGE2
iM
t
tvM
t
t
MODO 1
iD2
iT2
t
t
500 V
100 A
100 A
100 A
iD1
iT1
t
t
1 ms800 µsvGE1
vGE2
iM
t
tvM
t
vM
t
t
MODO 1
iD2
iT2
t
t
500 V
100 A
100 A
100 A
iD1
iT1
t
t
1 ms
500 µsvGE1
vGE2
iM
t
tvM
t
t
MODO 2
iD2
iT2
t
t
-50 A
500 V
50 A
50 AiD1
iT1
t
t
1 ms
500 µsvGE1
vGE2
iM
t
tvM
t
vM
t
t
MODO 2
iD2
iT2
t
t
-50 A
500 V
50 A
50 A
Figura 2
Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 12 de 17
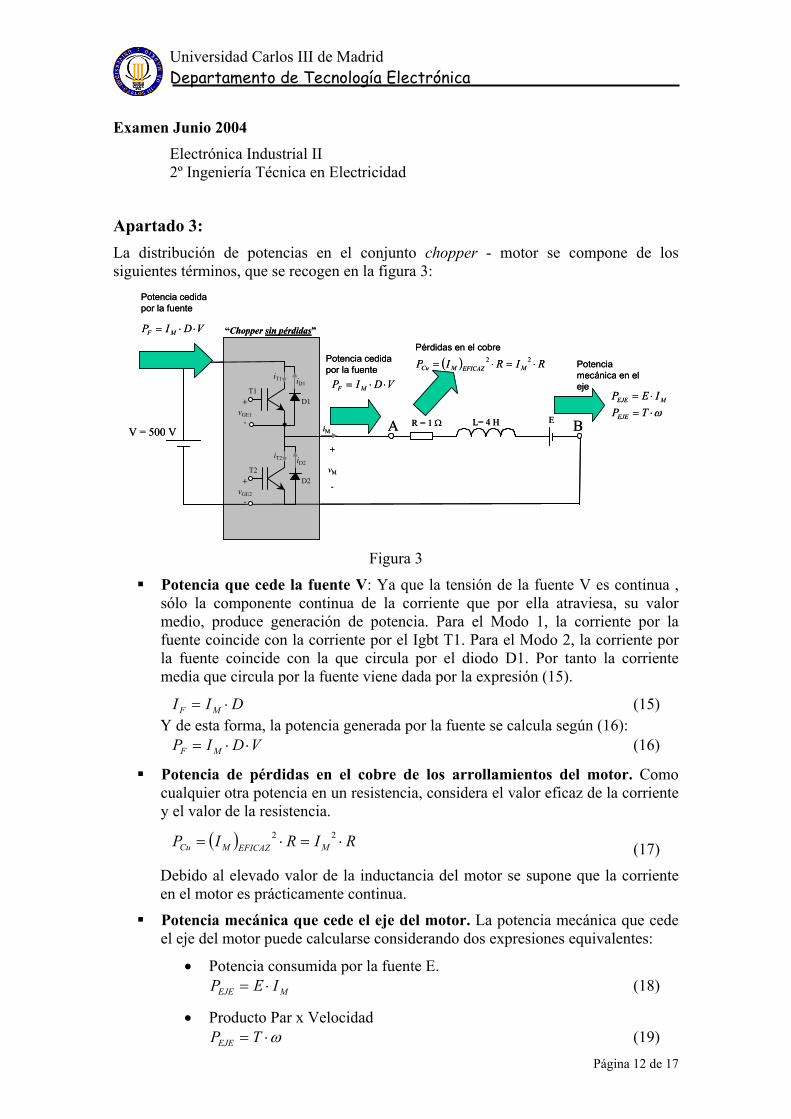
Apartado 3: La distribución de potencias en el conjunto chopper - motor se compone de los siguientes términos, que se recogen en la figura 3:
V = 500 V
T1D1
iD1iT1
T2D2
iD2iT2
iM
+vGE1
-
+vGE2
-
+
vM
-
R = 1 Ω L= 4 H EA B
Potencia cedida por la fuente
Pérdidas en el cobre
Potencia mecánica en el eje
“Chopper sin pérdidas”
Potencia cedida por la fuente
VDIP MF ⋅⋅=
( ) RIRIP MEFICAZMCu ⋅=⋅= 22
MEJE IEP ⋅=VDIP MF ⋅⋅=
ω⋅= TPEJE
V = 500 V
T1D1
iD1iT1
T2D2
iD2iT2
iM
+vGE1
-
+vGE2
-
+
vM
-
R = 1 Ω L= 4 H EA B
Potencia cedida por la fuente
Pérdidas en el cobre
Potencia mecánica en el eje
“Chopper sin pérdidas”
Potencia cedida por la fuente
VDIP MF ⋅⋅=
( ) RIRIP MEFICAZMCu ⋅=⋅= 22
MEJE IEP ⋅=VDIP MF ⋅⋅=
ω⋅= TPEJE
Figura 3
Potencia que cede la fuente V: Ya que la tensión de la fuente V es continua , sólo la componente continua de la corriente que por ella atraviesa, su valor medio, produce generación de potencia. Para el Modo 1, la corriente por la fuente coincide con la corriente por el Igbt T1. Para el Modo 2, la corriente por la fuente coincide con la que circula por el diodo D1. Por tanto la corriente media que circula por la fuente viene dada por la expresión (15).
DII MF ⋅= (15) Y de esta forma, la potencia generada por la fuente se calcula según (16):
VDIP MF ⋅⋅= (16)
Potencia de pérdidas en el cobre de los arrollamientos del motor. Como cualquier otra potencia en un resistencia, considera el valor eficaz de la corriente y el valor de la resistencia.
( ) RIRIP MEFICAZMCu ⋅=⋅= 22
(17)
Debido al elevado valor de la inductancia del motor se supone que la corriente en el motor es prácticamente continua.
Potencia mecánica que cede el eje del motor. La potencia mecánica que cede el eje del motor puede calcularse considerando dos expresiones equivalentes:
• Potencia consumida por la fuente E. MEJE IEP ⋅= (18)
• Producto Par x Velocidad ω⋅= TPEJE (19)

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 13 de 17
Los valores para cada modo de operación se recogen en la tabla 2. Resulta interesante comprobar cómo el balance de potencia se cumple en ambos casos, con independencia de la expresión elegida para calcular la potencia mecánica entregada al eje.
Modo 1 Modo 2
Potencia generada
kWAVPG 408.0100500 =⋅⋅= kWAVPG 5.125.0)50(500 −=⋅−⋅=
Pérdidas en el cobre
kWAPCu 101100 2 =Ω⋅= kWAPCu 5,21)50( 2 =Ω⋅−=
Potencia mecánica en el eje
kWAVPEJE 30100300 =⋅=
kWrpm
rpmAA
mNP srad
EJE 3060
2150010091.1 =⋅⋅
⋅⋅⋅
=π
kWAVPEJE 15)50(300 −=−⋅=
kWPEJE 1560
21500)50(91.1 −=⋅
⋅⋅−⋅=π
Tabla 2

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 14 de 17
Problema 3 (3 puntos, tiempo recomendado: 50 min)
El inversor trifásico de la figura se utiliza para alimentar a 400 V rms (tensión de línea de la componente fundamental) y 50 Hz una carga trifásica resistivo-inductiva conectada en triángulo1, con R=10 Ω y L=100 mH por fase.
Determinar:
a) La tensión continua de entrada (Ve) que se necesita. b) Calcular la DAT de tensión y corriente de línea. Apoyarse para ello en la
expresión de la descomposición armónica de la forma de onda de tensión que corresponda de entre las dadas en las hojas adjuntas.
c) Si reconectamos las fases de la carga en estrella, calcular las nuevas DATs que resultan.
d) Justificar cómo evolucionaría la DAT de corriente en cada uno de los siguientes casos:
• Se controla el inversor para proporcionar una frecuencia en la onda de salida creciente.
• La componente reactiva se hace capacitiva en lugar de inductiva. e) En el supuesto de que sólo dispusiéramos de una Ve de 800 V no regulables y
recurriéramos a una conmutación PWM sinusoidal unipolar para conseguir la Ve calculada en el apartado a), establecer unos índices de modulación de amplitud y frecuencia adecuados, sabiendo que, en zona lineal, con un ma=0,5 conseguimos una componente fundamental de 280 V rms.
1 Recordar que la relación de equivalencia entre impedancias conectadas en estrella y triángulo es:
∆= ZZY 31
Ve
T2
T1 D1
D2T2
T1 D1
D2 T6
T5 D5
D6
R S T
T4
T3 D3
D4T4
T3 D3
D4

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 15 de 17
Solución Problema 3
Apartado a) La Ve necesaria viene impuesta por la amplitud exigida para la componente fundamental de la salida. La relación entre ambas la obtenemos de la descomposición armónica de la tensión de línea de salida del inversor, cuya forma de onda se corresponde con la tercera de entre las dadas en las hojas adjuntas (con α=30º), por lo que será (se añade el subíndice ‘p’ para enfatizar la condición de “valor de pico” de la expresión):
)º30cos(4 nnVeVnp π
=
En particular, para n=1 (componente fundamental), resulta:
VV
VeVeVeVeV pp 513
322400
3232
234º30cos4 1
1 ===⇒===ππ
πππ
Apartado b) Para calcular la corriente de línea necesitamos convertir la carga a conexión estrella y, con el valor de impedancia de fase resultante y el de la tensión de fase, obtener mediante la Ley de Ohm el valor de intensidad de línea para cada índice armónico. La impedancia por fase de la estrella equivalente es, en función del índice armónico:
Ω⋅
+=+==−
∆∆
310100)502(
310
333)()(
3njLjRnZnZYπω
Por su parte, la tensión de fase en función del índice armónico podemos obtenerla de dos formas:
a. Identificando la forma de onda conocida de la tensión de fase entre las dadas en la hoja adjunta (es la cuarta) y utilizando su descomposición armónica
b. Utilizar la descomposición armónica de la tensión de línea (ya utilizada en el apartado anterior) y servirnos de la relación constante que guardan las tensiones de fase y de línea de cada índice armónico, que es la misma que la de sistemas trifásicos de onda puramente senoidal, esto es, 3 .
Lo haremos de este último modo puesto que la expresión de la descomposición armónica de la tensión de línea es ostensiblemente más sencilla de manejar que la de la tensión de fase. Por tanto, la tensión de fase en función de n será (‘f’ denota “valor de fase”):
πππ nVe
nVen
nVeV npf
223
34)º30cos(
34
, ===

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 16 de 17
donde se ha sustituido )º30cos( n por 23 dado que, como se puede comprobar, para
todos los índices armónicos de amplitud no nula (que, como es sabido, son n = 1, 5, 7, 11, 13, 17, 19,…), el valor del coseno correspondiente es siempre ése. De manera que la expresión de la intensidad de línea en función de n queda:
2323,
,
310100)502(
310
2
310100)502(
310
2
⋅+
=⋅
+==
−−
n
nVe
nj
nVe
ZV
IYn
npfnpL
π
ππ
π
La de la tensión de fase es la ya utilizada:
πππ nVe
nVen
nVeV npL
32234)º30cos(4
, ===
Evaluamos a continuación estas expresiones para los índices armónicos a considerar hasta que las amplitudes decaigan suficientemente respecto de la de la componente fundamental (400 Vrms, 565 V de pico) para, a partir de ellas, calcular las DAT’s pedidas:
n npLV , (V) npLI , (A)
1 565,7 29,72 5 113,1 1,25 7 80,8 0,64 11 51,4 0,26 13 43,5 0,18 17 33,3 0,11
Truncamos la serie
Llevando estas amplitudes a la expresión de la DAT resulta:
%9,4049,0)(
%4,28284,0)(
1,
217,
213,
211,
27,
25,
1,
217,
213,
211,
27,
25,
≡=++++
≈
≡=++++
≈
pL
pLpLpLpLpL
pL
pLpLpLpLpL
IIIIII
IsDAT
VVVVVV
VsDAT
Apartado c) No es necesario recalcularlas porque podemos afirmar a priori que serán exactamente las mismas. La justificación de esta identidad es obvia para la DAT(Vs), puesto que al ser el inversor de tensión, la forma de onda de ésta no depende del tipo de carga ni de su magnitud y, por tanto, tampoco su DAT. Para la corriente la justificación deriva del hecho de que el efecto de reconectar en estrella equivale (por conversión estrella/triángulo) a mantenerlas en triángulo pero multiplicando por 3 el valor de la

Universidad Carlos III de Madrid Departamento de Tecnología Electrónica Examen Junio 2004 Electrónica Industrial II 2º Ingeniería Técnica en Electricidad
Página 17 de 17
impedancia de fase. Puesto que de esta multiplicación todas las corrientes armónicas quedarían divididas por 3, al dividir en la expresión de la DAT(Is) el valor eficaz de las corrientes armónicas de n distinto de 1 por el de la corriente de la componente fundamental, se cancelarían las atenuaciones y la DAT quedaría invariable.
Apartado d) • En el primer caso la DAT de corriente disminuirá con el crecimiento de la
frecuencia, ya que la frecuencia, al afectar sólo a la componente inductiva de la impedancia y por ser este efecto tanto más acusado cuanto mayor sea el índice armónico, atenuará las amplitudes armónicas tanto más cuanto mayor sea su índice n.
• En el segundo caso la DAT aumentará, puesto que las capacidades, al contrario que las inductancias, favorecen (disminuyen su reactancia) las frecuencias altas y atenúan las bajas.
Apartado e) Veamos primero si para obtener la Ve que se precisa (513 V), necesitamos salir de la zona lineal. En dicha zona el ma necesario, teniendo en cuenta el dato ofrecido y sirviéndonos de la relación de linealidad con ma que tenemos en esta zona a condición de que mf sea suficientemente grande, sería:
916,02805135,0 ==am
Al ser ma<1 no necesitamos salirnos de la zona lineal, por lo que el cálculo realizado es válido y el obtenido es el ma que se requiere. En cuanto a mf, la única condición que ha de cumplir es la mencionada anteriormente, es decir, que sea “suficientemente” grande. Podemos escoger mf=25 y así, además, evitamos tener que sincronizar las ondas de referencia y portadora.