Estabilidad en Sistemas Lineales
25
Figura 1 Regiones de estabilidad e inestabilidad en el plano s. La expresión general de una raí j Región inestable Región inestable Región estable Región estable Estabilidad en sistemas lineales. Establecer la estabilidad de un sistema de fundamental importancia a la ora de trabajar con sistemas físicos reales! para ello existen c criterios! en este laboratorio usaremos los criterios de polos " de #"$uist para establecer la estabilidad en un sistema% tambi&n se 'erá cómo es $ue un sistema puede 'ol'erse inestable! para ello se calcularán los márgenes de ganancia " de fase de cada uno de los sistemas mostrados! además tambi&n se 'erá cómo in(u"en los polos en el sistema. )ntes de pasar al desarrollo se planteará los criterios a utilizar para seg realizado en el presente informe. Criterio de polos El criterio de polos! consiste en determinar los polos de la fun transferencia del sistema! para 'er donde están ubicados en el plano s! si los polos se encuentran ubicados en el semiplano dereco! signi*cará $ue son positi'os! además esto indicará $ue el sistema es un sistema inestable! si resulta $ue los polos se encuentran en la parte iz$uierda del plano s entonces se ablará de polos negati'os lo $ue implicará $ue el sistema es un sistema estable! basta $ue uno de los polos del sistema sea positi'o par a*rmar $ue el sistema es inestable. ara determinar los polos de la función de transferencia tenemos opciones! la primera! será utilizar la función roots de ,)-L) ! con la cual allarán las raíces del denominador de la función de transferencia " la otr opción es usar la función pole! con lo cual bastara ingresar la función de transferencia. En el presente informe se usarán ambas formas. Criterio de Nyquist.
-
Upload
ricardo-rodriguez-torres -
Category
Documents
-
view
4 -
download
0
description
Lab Sistemas Automáticos
Transcript of Estabilidad en Sistemas Lineales
Estabilidad en sistemas lineales.
Establecer la estabilidad de un sistema de fundamental importancia a la hora de trabajar con sistemas fsicos reales, para ello existen ciertos criterios, en este laboratorio usaremos los criterios de polos y de Nyquist, para establecer la estabilidad en un sistema; tambin se ver cmo es que un sistema puede volverse inestable, para ello se calcularn los mrgenes de ganancia y de fase de cada uno de los sistemas mostrados, adems tambin se ver cmo influyen los polos en el sistema.
Antes de pasar al desarrollo se plantear los criterios a utilizar para seguir lo realizado en el presente informe.
Criterio de polos
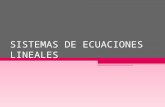
El criterio de polos, consiste en determinar los polos de la funcin de transferencia del sistema, para ver donde estn ubicados en el plano s, si los polos se encuentran ubicados en el semiplano derecho, significar que son positivos, adems esto indicar que el sistema es un sistema inestable, si resulta que los polos se encuentran en la parte izquierda del plano s entonces se hablar de polos negativos lo que implicar que el sistema es un sistema estable, basta que uno de los polos del sistema sea positivo para afirmar que el sistema es inestable.
Figura 1Regiones de estabilidad e inestabilidad en el plano s. La expresin general de una raz est dada por + j
jRegin inestableRegin inestableRegin estableRegin estable
Para determinar los polos de la funcin de transferencia tenemos dos opciones, la primera, ser utilizar la funcin roots de MATLAB, con la cual se hallarn las races del denominador de la funcin de transferencia y la otra opcin es usar la funcin pole, con lo cual bastara ingresar la funcin de transferencia. En el presente informe se usarn ambas formas.
Criterio de Nyquist.
Este criterio se basa en el anlisis del grfico de Nyquist de un sistema, para determinar la estabilidad del mismo, si el grfico encierra el punto (-1,0) el sistema ser inestable, si no entonces estaremos frente a un sistema estable.Adems con esto podemos averiguar el margen de ganancia y el margen de fase del sistema, haciendo un anlisis del mdulo del |F0|y del desfase, que se muestra en la grfica y tambin analticamente.
Metodologa:
Para determinar si es estable o no se analizar el Nyquist del sistema para ellos se usar la funcin Nyquist () de MATLAB.
Yi=tf(num,den,inputdelay,__)// con esto se obtendr la funcin de transferencia a analizar. (el input delay se utilizar en caso se presente retardo).
Nyquist (Yi)// con esta funcin obtendr el grfico de Nyquist del sistema.
Teniendo el grfico se puede analizar el margen de ganancia, para lo cual se deber ver el punto en cual el grfico corta al eje real en menos uno y luego dividir 1 entre este valor.
Grfico de ejemploComo se puede apreciar ese valor es aproximadamente 0.186, por lo cual el margen de ganancia deber ser aproximadamente 5.38
Adems matlab cuenta con la funcin margin, con esta funcin obtendr los valores de margen de fase y de ganancia.
[Gm,PM]=margin(Yi)Dnde: Gm: margen de ganancia Pm: margen de faseComo lo que se busca es exactitud usaremos la funcin margin, ahora bien veremos cuanto es el margen de ganancia para la funcin del grafico de ejemplo.
yi=tf(1,[4 5 6],'inputdelay',2)
Transfer function: 1exp(-2*s) * --------------- 4 s^2 + 5 s + 6 >> [Gm,Pm]=margin(yi)
Gm =
5.3644
Como se puede apreciar el valor calculado grficamente se acerca bastante al valor real, pero como ya se mencion por exactitud se usar la funcin margin de MATLAB.
1. Averiguar la estabilidad relativa de los siguientes sistemas que representan procesos. Justificar la forma de los diagramas de Nyquist.Adicionalmente podemos calcular el margen de ganancia y el margen de fase, esto lo haremos de dos formas, la primera que ser basndome en el grfico de Nyquist y la segunda ser utilizando la funcin margin de MATLAB; debido a la exactitud que se busca utilizaremos los valores obtenidos con la funcin margin.
a)
Transfer function: 1exp(-2*s) * --------------- 4 s^2 + 5 s + 6
Criterio de polos:dena=[4 5 6]roots(dena)ans = -0.6250 + 1.0533i -0.6250 - 1.0533i
}Como se puede apreciar, las races reales de la funcin de transferencia son negativas, por lo cual por el criterio de polos podemos afirmar que el sistema es un sistema estable. Adems podemos apreciar que presenta parte imaginaria lo cual no dice que el sistema presentar oscilaciones.Como se mencion anteriormente el sistema es estable y se presenta con oscilaciones lo cual se demuestra a continuacin:
Criterio de Nyquist:
Para poder establecer la estabilidad en base a este criterio hay, que analizar el diagrama de Nyquist de la funcin de transferencia, el cual se muestra a continuacin.
Como se puede apreciar, la grfica muestra que para un desfase de -180 la ganancia no es -1 sino menor, lo cual quiere decir, que este diagrama no envuelve a -1 por lo que se puede asegurar que el sistema es estable, adems si nos fijamos en ningn punto el mdulo de C(s)*P(s) es igual a 1, por lo que se puede afirmar que a pesar del retraso presente el sistema ser estable y se podra decir que ser un sistema robusto.
b)
Transfer function: s - 1-------4 s + 5
Criterio de polos: >> roots([4 5])ans = -1.2500
Como se puede observar, esta funcin de transferencia, solo tiene una raz y es una raz real negativa, por lo que se puede afirmar que es un sistema estable, har falta analizar qu tan estable es.
Como se puede observar en la imagen anterior, el sistema como se supuso, fue estable.
Criterio de Nyquist.
Para poder establecer la estabilidad en base a este criterio hay, que analizar el diagrama de Nyquist de la funcin de transferencia, el cual se muestra a continuacin.
Como se puede apreciar el sistema de Nyquist del sistema muestra que no se envuelve a -1 en el eje real, por lo que se puede afirmar que es estable y se puede afirmar que este sistema es robusto, dado que en ningn punto |F0| es igual a 1.
c)
Transfer function: s + 8 ------------- s^2 + 6 s + 9
Criterio de polos: >> roots([1 6 9]) ans =
-3.0000 + 0.0000i -3.0000 - 0.0000i
Como se puede apreciar este sistema presenta dos races iguales y negativas, por lo cual se afirma que este es un sistema estable, habr que analizar como en los casos anteriores que tan estable es, esto se puede analizar haciendo uso del criterio de Nyquist.
La grfica mostrada, comprueba que nuestro sistema es un sistema estable.
Criterio de Nyquist.
Para poder establecer la estabilidad en base a este criterio hay, que analizar el diagrama de Nyquist de la funcin de transferencia, el cual se muestra a continuacin.
Como se aprecia en diagrama de Nyquist mostrado, el sistema es un sistema estable y se puede afirmar que es un sistema robusto, pues est bastante lejos del valor donde |F0|=1, tambin se puede decir que el margen de ganancia es alto, lo que implica estabilidad y asegura la robustez del sistema. Adems si se observa el diagrama se puede observar que este sistema nunca podr volverse inestable, debido a que no llegar a envolver al punto (-1,0), por ningn motivo.
d)
Transfer function: s - 3------------- s^2 - 5 s + 8
Criterio de polos:>> roots([1 -5 8])ans = 2.5000 + 1.3229i 2.5000 - 1.3229iComo se puede apreciar las races de este sistema son positivas, lo cual nos indica que el sistema ser inestable.
Como se observa en la imagen, se comprueba la inestabilidad de este sistema, habr que usar el siguiente criterio que es el de Nyquist para ver qu tan inestable result.
Criterio de Nyquist.
Para poder establecer la estabilidad en base a este criterio hay, que analizar el diagrama de Nyquist de la funcin de transferencia, el cual se muestra a continuacin.Como se puede esperar el diagrama de Nyquist envolver a -1 en el eje real, dado que basndonos en el criterio de polos el sistema es inestable.
2. Para cada proceso del apartado anterior, encontrar un controlador que aplicado en realimentacin negativa haga que el respectivo sistema a lazo cerrado se torne inestable.Para realizar este apartado hay que tener en cuenta lo siguiente:Para que un sistema se vuelva inestable, se puede aumentar el Kp o agregar un retraso, usando un controlador proporcional, se puede ampliar el K usando el Kc, para ello hay que tener en cuenta el margen de ganancia, porque este margen de ganancia indica cuando deber aumentar el Kp para volver al sistema inestable, por ello el Kc bastar con ser igual a Kp pero para asegurar a inestabilidad se har una aproximacin de los Kc.C(s)P(s)r+-euy
Para demostrar la inestabilidad entonces se har el diagrama de Nyquist de |F0|, es decir C(s)*P(s).
a)
[Gma,Pma]=margin(ya)Gma =5.3644Pma =Inf
Dnde: Gma: margen de ganancia.Pma: margen de fase.
De lo anterior podemos deducir que: un Kc igual o mayor a 5.3644 generar una inestabilidad en el sistema. Se usar un Kc = 5.4
CPaa=tf(5.4,[4 5 6],'inputdelay',2) Transfer function: 5.4exp(-2*s) * --------------- 4 s^2 + 5 s + 6 >> nyquist(CPaa)
Como se puede apreciar en el diagrama de Nyquist, el sistema llega a tocar el punto -1 lo cual nos dice que el sistema es inestable.
b)
[Gmb,Pmb]=margin(yb)Gmb = 5Pmb = Inf
Dnde: Gmb: margen de ganancia.Pmb: margen de fase.
De lo anterior podemos deducir que: un Kc igual o mayor a 5 generar una inestabilidad en el sistema. Se usar un Kc = 5
Kcb=tf(5,1) Transfer function:5 >> CPb=Kcb*yb Transfer function:5 s - 5-------4 s + 5 >> nyquist(CPb)
Como se puede apreciar el diagrama de Nyquist de C(s)*P(s) envuelve al punto (-1,0) lo que comprueba la inestabilidad.
c)
[Gmc,Pmc]=margin(yc)Gmc = InfPmc = Inf
Como ya se sospechaba en el ejercicio 1 no habr controlador alguno que pueda volver inestable este sistema
d)
[Gmd,Pmd]=margin(yd)Warning: The closed-loop system is unstable. > In warning at 26 In DynamicSystem.margin at 60
Gmd = 2.6667Pmd = Inf
Como se dijo en el primer ejercicio este sistema ya era inestable, no es necesario un controlador para volverlo inestable.
3. Se tiene un proceso de primer orden representado por la siguiente ecuacin Evaluar como varan los mrgenes de fase y de ganancia para las siguientes situaciones. Justifique los resultados obtenidos. Mostrar los resultados grficos.y3=tf(5,[4 1],'inputdelay',2)
Transfer function: 5exp(-2*s) * ------- 4 s + 1
Como se puede apreciar el sistema es inestable.
a) Se aumenta la constante de tiempo de 4 a 20
y3a=tf(5,[20 1],'inputdelay',2) Transfer function: 5exp(-2*s) * -------- 20 s + 1
Parte superior: nueva funcin de transferencia.Parte inferior: funcin de transferencia original
Como se puede observar en la imagen anterior, al aumentar la constante de tiempo de 4 a 20 el sistema se estabiliza en comparacin al sistema inicial.b) Se aumenta el retardo de -2 a -4
y3b=tf(5,[4 1],'inputdelay',4) Transfer function: 5exp(-4*s) * ------- 4 s + 1
Parte superior: nueva funcin de transferencia.Parte inferior: funcin de transferencia original
Al apreciar la imagen anterior podemos darnos cuenta que el sistema se volvi mas inestable al incrementar el retardo.
c) Aada un polo igual a -2
y3c1=tf(1,[1 2]) Transfer function: 1-----s + 2 >> y3c=y3c1*y3
Transfer function: 5exp(-2*s) * --------------- 4 s^2 + 9 s + 2
Parte superior: nueva funcin de transferencia.Parte inferior: funcin de transferencia original
Como se puede apreciar, la nueva funcin vuelve estable al sistema inicialmente inestable, adems con un margen de ganancia bastante alto.
d) Aada un polo igual a 4
y3d1=tf(1,[1 -4]) Transfer function: 1-----s - 4 >> y3d=y3d1*y3
Transfer function: 5exp(-2*s) * ---------------- 4 s^2 - 15 s - 4
Parte superior: nueva funcin de transferencia.Parte inferior: funcin de transferencia original
Como ya era de suponerse, el sistema sigue siendo inestable debido a que se le ha agregado un polo positivo, lo que se muestra es que el diagrama de Nyquist se ha invertido, lo que pasa debido al retraso en el sistema.
e) Aada un cero igual a -3
y3e1=tf([1 3],1) Transfer function:s + 3 >> y3e=y3e1*y3 Transfer function: 5 s + 15exp(-2*s) * -------- 4 s + 1 >> subplot(2,1,1)>> nyquist(y3e)>> subplot(2,1,2)>> nyquist(y3)
Parte superior: nueva funcin de transferencia.Parte inferior: funcin de transferencia original
Como puede apreciarse en el grfico anterior, el sistema se vuelve ms inestable al aadirle un polo igual a -3.
f) Aada un cero igual a 5
y3f1=tf([1 -5],1) Transfer function:s - 5 >> y3f=y3f1*y3 Transfer function: 5 s - 25exp(-2*s) * -------- 4 s + 1 >> subplot(2,1,1)>> nyquist(y3f)>> subplot(2,1,2)>> nyquist(y3)
Parte superior: nueva funcin de transferencia.Parte inferior: funcin de transferencia original
Como se observa en la imagen anterior obtenida de matlab, el sistema se vuelve ms inestable an de lo que ya era, y nuevamente se observa el giro del sistema.
4. Se tiene un proceso de segundo orden representado por la siguiente ecuacin Evaluar como vara la respuesta en el tiempo en trminos de overshoot y tiempo de establecimiento para las siguientes situaciones. Justifique los resultados obtenidos. Mostrar los resultados grficos.a) Aada un polo igual a -2b) Aada un cero igual a -3c) Aada unos polos iguales a d) Aada unos ceros iguales a
Para la obtencin de la respuesta en el tiempo, se recomienda para esta apartado de ejercicios usar utilizar Simulink como se ve en la siguiente figura:
Como se puede apreciar se estn almacenando las respuestas y el tiempo para despus poder plotearlo.
Respuesta en el tiempo del sistema original.
a) Aada un polo igual a -2
ya1=tf(1,[1 2]) Transfer function: 1-----s + 2 >> y4a=ya1*y4
Transfer function: 5exp(-3*s) * ------------------------- 4 s^3 + 13 s^2 + 11 s + 2
Respuesta en el tiempo despus de aadirle un polo igual a -2 al sistema.
Como se puede apreciar al incrementar un polo igual a -2, el tiempo de establecimiento se mantiene igual, pero la ganancia del sistema se disminuye a la mitad, lo cual nos da una idea de que no es muy conveniente hacer esto, ya que cuando se disminuye la ganancia lo que se busca es mejorar el tiempo de establecimiento, lo cual no sucede en este caso.
b) Aada un cero igual a -3
y4f1=tf([1 3],1) Transfer function:s + 3 >> y4f=y4*y4f1 Transfer function: 5 s + 15exp(-3*s) * --------------- 4 s^2 + 5 s + 1
Respuesta en el tiempo despus de aadirle un cero igual a -3 al sistema.
Ahora el tiempo de establecimiento se ha incrementado, es decir se ha vuelto ms lento, pero la ganancia se ha triplicado, este beneficio al triplicarse la ganancia en comparacin del tiempo que se demora, resulta muy conveniente para el sistema porque por un costo de tiempo muy pequeo se obtiene una ganancia ptima.
c) Aada unos polos iguales a
R4=[-4+5i -4-5i]R4 =
-4.0000 + 5.0000i -4.0000 - 5.0000i
>> y4c1=poly(R4)
y4c1 =
1 8 41
y4c1=y4c1/41
y4c1 =
0.0244 0.1951 1.0000
>> y4c2=tf(1,y4c1) Transfer function: 1--------------------------0.02439 s^2 + 0.1951 s + 1 >> y4c=y4*y4c2 Transfer function: 5exp(-3*s) * ---------------------------------------------- 0.09756 s^4 + 0.9024 s^3 + 5 s^2 + 5.195 s + 1
Respuesta en el tiempo
Como se puede apreciar, el tiempo de establecimiento y la ganancia permanecen igual que con la funcin original; sin embargo, se puede decir que al agregar al proceso los polos, ste se hace ligeramente ms rpido.
d) Aada unos ceros iguales a
R4d=[-5-2i-5+2i]R4d = -5.0000 - 2.0000i -5.0000 + 2.0000i>> den4d=poly(R4d)den4d = 1 10 29>> den4d=den4d/29den4d = 0.0345 0.3448 1.0000>> y4d1=tf(den4d,1) Transfer function:0.03448 s^2 + 0.3448 s + 1 >> y4d=y4d1*y4 Transfer function: 0.1724 s^2 + 1.724 s + 5exp(-3*s) * ------------------------ 4 s^2 + 5 s + 1
De igual manera que en caso anterior, en el tiempo de crecimiento y en la amplitud no se aprecian cambios; pero esta vez, se ve que al agregar los ceros al proceso, ste se hace ms lento.
Conclusiones
Se pudo aprender y utilizar los criterios para medir la estabilidad de un sistema, apreciando la facilidad con que los mtodos, tanto el de polos como el de Nyquist, son aplicables.
Se ha podido determinar los valores de margen de ganancia y de margen de fase, que vienen a ser parmetros importantes cuando se quiere determinar la estabilidad de un sistema. Su importancia radica en que ambos nos dan la informacin correspondiente a cun cerca est nuestro sistema de ser inestable, lo que nos permitira realizar algn cambio para evitar que se d esta inestabilidad.
Tambin hemos podido ver la influencia, sobre la estabilidad de un sistema, de la constante de tiempo o del retardo, as como tambin la influencia de los polos y ceros. Estos puede resultar de utilidad cuando se requiera modificar algn proceso en busca de una mejor estabilidad y segn el grado que se requiera de sta, ya que como se ha visto, la modificacin a diferentes tipos de parmetros corresponden a diferentes modificaciones en la estabilidad.
Por ltimo, se ha podido ver cmo el diagrama de Nyquist posee varias aplicaciones y de cunta utilidad puede llegar a ser, por lo que tenemos que estudiarlo detenidamente para poder llegar a ver todas las caractersticas que nos puede proporcionar de un sistema y poder realizar, bajo un buen criterio, las modificaciones que creamos convenientes para mejorarlo.